Embed Size (px)
Citation preview

OPTIMAL RESOURCE ALLOCATION
IN ACTIVITY NETWORKS UNDER
STOCHASTIC CONDITIONS
Salah E. Elmaghraby†
Department of Industrial & Systems Engineering and
The Graduate Program in Operations Research
North Carolina State University, Raleigh NC, 27695-7906, USA
Girish Ramachandra
Citigroup Global Decision Management, Bangalore, India
Abstract
We treat the problem of optimally allocating a single resource under un-
certainty to the various activities of a project to minimize a certain economic
objective composed of resource utilization cost and tardiness cost. Traditional
project scheduling methods assume that the uncertainty resides in the dura-
tion of the activities. Our research differs from the traditional view in that
it assumes that the work content (or “effort”) of an activity is the source of
the ‘internal’ uncertainty — as opposed to the ‘external’ uncertainty — and the
duration is the result of the intensity of the resource allocated to the activity,
which then becomes the decision variable. The functional relationship between
the work content, the resource allocation, and the duration of the activity is
arbitrary, though we take it to be hyperbolic.
When the work content is known only in probability, we discuss the ap-
proach via stochastic programming and demonstrate its inadequacy to respond
to the various questions raised in this domain. Our analysis treats the special
case when the work content is exponentially distributed, which may be viewed
as an ‘upper bound’ distribution on most probability distributions suggested
in this field. This results in a continuous-time Markov chain with a single ab-
sorbing state. We establish convexity of the cost function and develop a Policy
Iteration-like approach that achieves the optimum in finite number of steps.
† Corresponding author.
1

Key Words: Activity Networks, Resource Allocation, Stochastic Work Content,
Phase-Type Distributions.
1 INTRODUCTION AND REVIEW
OF LITERATURE
We study the problem of optimal resource allocation to activities in a project in
order to optimize an economic objective in the face of uncertainty. Uncertainty
in the performance of an activity arises in two different (albeit perhaps interacting)
contexts: external and internal. “External uncertainty” is the result of factors that are
external to the content of the activity itself, such as the weather, labor absenteeism,
inoperative machinery, supplier default, and the like. “Internal uncertainty”, on the
other hand, resides in the indeterminateness of the activity itself even when all the
external factors are performing exactly as hoped for. Internal uncertainty is endemic,
for instance, to all research and development work: even when all personnel, materiel
and equipment are available and functioning perfectly, the achievement of the correct
composition of a new medication may remain elusive. The uncertainty in the activity
is ‘internal’ to the activity itself, not due to any ‘external’ element that is necessary
for, or supportive of, its achievement. The focus of this research is on the internal
uncertainty and the measures to cope with it. To be sure, external uncertainty should
not be ignored — but it is in addition to the internal uncertainty, and its consideration
should not be confused with the internal uncertainty.
Because of the close kinship of the problem dealt with here and the classical
resource-constrained project scheduling problem (RCPSP) we elaborate on the dis-
tinction between our approach and that of the RCPSP.
The classical RCPSP — which has undergone several expansions and transfor-
mations over the past thirty years — deals with the scheduling of precedence- and
resource-constrained activities in order to minimize the project completion time (among
2

other measures of performance). Our problem focusses on how to optimally allo-
cate a resource that is of limited availability to the activities, which are precedence-
constrained, such that the total cost of resource usage and project tardiness is mini-
mized.
It is our thesis that the internal uncertainty resides in the estimate of work con-
tent, that the decision made by management concerns mainly the resource allocated
to each activity, and that the duration of an activity is derived from its work con-
tent and the intensity of resource allocated to it. As indicated in Tereso, Araújo
and Elmaghraby [24] as well as in Morgan and Elmaghraby [17], our perspective dif-
fers from the traditional treatments of project planning under constrained resource
availability in the deterministic context, the RCPSP (see the paper by Ramachandra
and Elmaghraby [20] and the references cited therein, as well as the references cited
below) in that we consider the fundamental entity to be the work content (or total
“effort” or “energy”) of the activity, rather than its duration. It is our contention that
considerations of the work content of the activity as the variable to contend with –
rather than the activity’s duration – help focus attention on management’s primary
concern, namely, the management of the resources at their disposal. An important
additional benefit of such a perspective is the relative ease with which stochastic en-
vironments can be treated, which is well beyond the reach of traditional (activity
duration-based) approaches, as will be amply demonstrated below.
It should be mentioned here that the interaction between resource allocation and
activity duration was taken into account within the RCPSP optic by enumerating, for
each activity, the possible ‘modes’ of resource allocation and the resulting durations.
This led to reliance on discrete mathematical programming models which were sup-
planted with clever branch-and-bound procedures; see the book by Demeulemeester
& Herroelen [5] for comprehensive discussion of these and other models.
The literature on the stochastic discrete time-cost trade-off (DTCT) problem —
3

which bears some kinship1 to our problem — is quite sparse. A comprehensive sur-
vey as of 2006 can be found in Herroelen and Leus [14]. Those available focus on
scheduling the start date of the activities and do not take resource availability or
resource-induced constraints into account; see, for instance, the recent paper by So-
bel et al [22]. Interestingly enough, the paper by Sobel et al [22] relies on the same
model (of continuous time Markov chains) as this paper, with the major difference
lying in our assumption that the processing of an activity is initiated as soon as it is
precedence-feasible while Sobel et al [22] search for the optimal delay in the initiation
of an activity in order to maximize the present value of the project.
Wollmer [31] discusses a stochastic version of the linear time/cost trade-off prob-
lem. He treats extensions to the problem of minimizing the expected project comple-
tion time subject to a budget constraint and the problem of achieving a feasible fixed
expected project completion time at minimum cost as well as generation of the project
duration-cost curve. Golenko-Ginzburg and Gonik [11] develop a heuristic procedure
for the RCPSP with stochastic activity times, with the objective of minimizing the
expected project duration. Their procedure operates in stages where a decision is
made to schedule the next activity based on the precedence constraints and current
resource availability. If several activities are competing for limited resources, a mul-
tiple knapsack problem is solved to select the next activity (or subset of activities) to
be scheduled. The objective function of the knapsack formulation is the maximum
total contribution of the selected activities towards the expected project duration.
The individual activity contribution is calculated as the product of the average ac-
tivity duration and the probability of being in the critical path during the course of
the project. The probability values are approximated by frequency values found via
simulation. The rationale for this approach is to give ‘critical activities’ priority over
others because of their significant impact on the expected project duration.
Another related publication dealing with the RCPSP with stochastic activity
1To the best of our knowledge, except for the papers cited here, none of these studies is concerned
with the optimal resource(s) allocation to the activities.
4

times is due to Fernandez and Armacost [10]. Their short article warns users of off-
the-shelf scheduling software of the danger of omitting non-anticipative constraints.2
Specifically, they mention that Monte Carlo based approaches, such as those in
OperaR°and @RISK
R°for Project, do not incorporate non-anticipative constraints
and therefore their output may be misleading. The primary output of these soft-
ware packages generally is the empirical distribution of project duration. Since the
procedures in these packages solve each scenario separately without enforcing non-
anticipativity constraints, they arrive at un-implementable solutions (i.e., solutions
that are based on information that is not available to the decision-maker at the time
the decision was made).
Stork [23] provides an excellent insight into the stochastic resource scheduling
problem. He addresses the objective of makespan minimization and provides branch-
and-bound algorithms. He uses the classical critical path as lower bound and imple-
ments some clever sorting rules, preselection policies, and dominance rules to prune
the search tree. See the handbook by Demeulemeester and Herroelen [5] for a lucid
summary of Stork’s treatment.
Gutjahr, Strauss and Wagner [12] describe a stochastic branch-and-bound proce-
dure for solving a specific version of the stochastic DTCT where so-called ‘measures’
– actually ‘actions’ such as the use of manpower, the assignment of skilled labor, etc.
– may be used to increase the probability of meeting the project due date, thereby
avoiding heavy penalty costs.
In a more recent contribution, Azaron et al. [1] use control theory to study
resource allocation in “Markov PERTNetworks”, which is another name of the CTMC
model adopted in this research. That paper differs from ours in at least two important
respects:
2A decision based on perfect information is called an anticipative decision. It is anticipative
since it is based on assumed deterministic scenarios. Unfortunately, it is non-implementable since it
relies on information unavailable to a decision maker at the time it is made. The nonanticipativity
constraint of multi-period stochastic problems impose the requirement that solutions be based only
on information known at the time of decisions.
5

1. They list three objectives: (i) minimize the resource usage cost. (We include
the resource cost in our total cost function); (ii) minimize the mean duration of
the project. (We assume a given due date and attempt to minimize the cost
of deviating from it. We deal with only one side of this cost, namely, the cost
of tardiness, but our model can easily accommodate a cost of (or gain from)
earliness.) (iii) minimize the variance of the project completion time. (We have
nothing comparable to this objective.)
2. They use a different methodology to solve the problem. The authors explain
that the resource allocation costs and project tardiness costs are in conflict
and therefore they decide to model the problem as a multi-objective stochastic
program. Ultimately the authors describe Goal Attainment and Goal Program-
ming methodologies to solve the problem and provide computational results for
a few examples. They state that their solution allows for activity times to be
taken from any distribution as a generalized Erlang distribution. They also
arrive at the conclusion that an optimal solution to the control problem cannot
be found, and so resort to the discretization of time, modeling the problem with
difference (rather than differential) equations and use non-linear programming
to solve the problem.
Talk about stochastic activity networks typically raises the specter of the use of
stochastic programming (SP). We provide a brief overview of SP and investigate its
applicability to our problem. To aid the understanding of the nature of our problem,
we discuss a recently researched stochastic project scheduling problem that uses the
concepts of SP.We provide a simple example to illustrate our contention that standard
stochastic programming formulations are inapplicable to our problem, mainly due to
the non-separability of the decision variables in the two stages of the SP model.
The problem as it is stated here had been addressed by Tereso, Araújo and El-
maghraby [26] who assumed the resource allocation to an activity, once made, remains
invariant and cannot be changed for the duration of the activity. Recognizing that
6

this is at variance with common practice where the manager does indeed change the
resource allocation dynamically according to changes in the state of the project (the
so-called ‘managerial flexibility’ [15]), we model our problem as a continuous time
Markov chain (CTMC ) and propose a ‘policy iteration-type’ approach based on the
state space of the CTMC. The most important drawback of such an approach, apart
from the assumption on the exponential distribution, is the vast increase in the state
space with increase in the size of the project network coupled with the rapid increase
in the number of iterations to reach a solution.
The structure of this paper is as follows. In § 2 we state our problem in more
detail along with the assumptions made. In § 3 we address the technique of stochastic
programming (SP), which is also known as mathematical programming under uncer-
tainty. We discuss recent research efforts that apply the concept of SP to a stochastic
resource-constrained project scheduling problem, and argue for the inapplicability of
standard SP techniques to our problem. In § 4 we outline a ‘policy iteration-type’
procedure of dynamic programming for solving the problem posed, which we model
as a continuous-time Markov chain (CTMC ) along the lines of the work by Kulkarni
& Adlakha [16]. We introduce the ‘phase type distributions’ which play an impor-
tant role in policy evaluation, and discuss its application. Finally § 5 summarizes the
contributions of this paper and points out future avenues of research on this impor-
tant problem. For the sake of self-containment, a brief review of Stochastic Linear
Programming is presented in the Appendix (§ 6).
2 PROBLEMSTATEMENTANDASSUMPTIONS
We are given a project network of activities defined by a graph = (), in
which A is the set of arcs defining the activities, with || = and the precedence
relations among them (in the activity-on-arc (AoA) mode of representation), and
7

N is the set of nodes with | | = . The graph is acyclic and we assume that the
nodes are numbered ‘topologically’, meaning that an arrow leads from a node to a
larger-numbered node with the start of the project being node 1 and its termination
being node n.3 Let denote the work content of activity ,4 a random variable
(r.v.). We consider a single renewable resource and let be the allocation of the
resource to activity — the decision variable, a deterministic entity. Let denote
the total availability of the renewable resource, assumed constant over the planning
horizon. Define to be the per-unit cost of usage of the resource per unit time.
Thus an activity that takes time to complete will incur ‘resource usage cost ’ equal
to We further assume that the project has a specified due date , and let
(max{ 0Υ− }) be the cost of tardiness when the project completes at time Υ,a r.v.
Our objective is to determine the resource allocation vector, X =(1 ) to
the activities such that the overall expected cost of resource allocation and tardiness
is minimized. More formally, it is desired to
minX
E"X
+ (max{ 0Υ− })# (1)
subject to: (i) the activities’ precedence constraints which are of the form©Γ−1 () ≺ ; = 2
ªin which Γ−1 () is a subset of the activities and ‘ ≺ ’ indicates precedence; and (ii)
‘box-type’ resource allocation bounds of the form
≤ ≤
Adoption of the expected value of cost as the measure of performance may not
be palatable to some managers because of its identification with the concept of fre-
quency, when the manager is faced with a unique scenario which may not repeat. In
3Nodes 1 and n may be nodes that correspond to the start and termination of no ‘real’ activity;
in which case arcs {(1 )} and {( )} represent fictitious (or dummy) activities.4We designate an activity either by its identity a or by its end-nodes ( ) ; and ∈
8

such situation we recommend a ‘fiduciary’ interpretation of probability in which the
concept of ‘average’ may be more acceptable.
3 THE APPROACH VIA STOCHASTIC
PROGRAMMING
Stochasticity in the work content combined with optimization invoke the vision of
implementing the known approach of stochastic linear programming to the resource
allocation problem. Because of the negative conclusion that was reached, and for the
sake of self-containment, we devote Appendix 2 to its discussion. We give first a brief
overview of the approach, then proceed with a review of attempts at implementing
it, which led us to conclude that the approach is ill-equipped to tackle the problems
posed here. This is mainly due to the fact that stochastic linear programming assumes
separability between the decision made at one stage (the vector X in the model) and
the decision made at the subsequent stage (the vector Y in the model), which is not
a valid assumption in activity networks.
4 THE APPROACH VIA
POLICY-ITERATION (PI-TYPE)
For the sake of tractability in analysis, assume that the activity’s work content
follows an exponential distribution
∼ () ∀ ∈ (2)
The assumption of exponential work content carries two important implications: (i)
that the probability distribution of the work content remains the same after the
expenditure of any amount of effort, thanks to the memory-less property of the ex-
ponential distribution, a property that is not shared by any other distribution; and
(ii) that there is no loss of optimality in revising the decision on resource allocation
9

only at the moment of an activity completing its processing, which relieves one from
tracking the system over all time.
Assume that there is a single resource and that its allocation to activity a is
bounded from below and from above, i.e.,
0 ≤ ≤ ≤ ∞ ∀ ∈ (3)
Let the resulting duration of activity be denoted by given by
=
⇒ = (4)
Evidently is also exponentially distributed, but with parameter , henceforth
denoted by ; i.e.,
∼ () ; = (5)
Next, consider the cost of the resource usage by an activity. We shall assume that
the total cost of resource allocation to activity denoted by is quadratic in the
allocation over the duration of the activity; i.e.,
= 2 = (6)
The assumption of a quadratic cost function in the intensity of the resource, together
with the ‘hyperbolic’ relation (4) between duration and resource intensity result in
a linear relation between the resource cost of the activity and its work content, as
evidenced by (6) Evidently, a more general relation between the activity’s duration
and resource intensity would result in more complex resource cost functions. For
instance, suppose
=
in which the exponent typically lies in the interval [05 1) and reflects, in some
sense, the ‘efficiency’ of utilization of additional resource. Further, the resource cost
may not be quadratic for the duration, but rather some other other parameter so
10

that the cost becomes Then the activity’s resource cost would be given
by
= =
−
a nonlinear relation between and One would gain a more realistic model of
the process, but simplicity of exposition and computing would then be forfeited.
In this section we analyze the problem from the perspective of ‘managerial flexi-
bility’ which assumes that it is possible to change the resource allocation to the same
activity according to the changes in the state of the project. This represents the
main departure of our treatment from the work of Tereso, Araújo and Elmaghraby
[24]-[27]. To be more precise, consider the scenario where more than one activity
are in progress at any point in time. Eventually one of them finishes first. Now the
manager is allowed to change the allocation of the resource to the still ongoing activ-
ities (the ‘active’ activities). This perspective requires the definition of the ‘state’ of
the project and the corresponding ‘state space’ network. This is basically the model
treated by Kulkarni and Adlakha [16], which is based on the realization that we are
in fact dealing with a continuous time Markov chain (CTMC ). The main distinction
between our study and that reported in the work of Kulkarni and Adlakha is that we
are interested in optimization of resource allocation, while they dealt only with the
analysis of the resulting CTMC.
The next two sections briefly describe the two elements of interest to us in the
construction of our procedure: the structure of the CTMC relevant to our application,
and the properties of the ‘phase type distributions’ and their relevant parameters.
Following these introductory remarks we present the ‘policy iteration-type’ (PI-type)
procedure which is suggested as the solution approach to our problem.
4.1 CONTINUOUS TIME MARKOV CHAINS (CTMC)
In order to be able to transform our problem into a CTMC, we introduce some
notation from [16] which is defined for a fixed allocation vector X
11

We have = () as the project network. We assume that the project starts
at time zero and ends at time Υ, a r.v. During the course of the project execution,
each activity can be in one and only one of the following three states:
(i) active: an activity is active at time if it is being executed at time 5
(ii) dormant: an activity is dormant at time if it has finished but there is at
least one unfinished activity that ends as the same node as .
(iii) idle: an activity is called idle at time if it is neither active nor dormant at
time : the activity is either completed or is yet to be started.
For ≥ 0, define the sets
A() = { ∈ : is active at time }D() = { ∈ : is dormant at time }() = (A()D()) : the state at time t
We also make the following assumption:
A1. The work content of the activities in the project, and hence their durations, are
mutually independent positive random variables.
Let S denote the set of all the states of the project, S = { ()}, and let eS beits extension to include the null set; eS = S ∪ {( )}. Note that state () = ( )signifies that all activities are neither active nor dormant, hence they must be idle at
time and therefore the project is completed.
Under the assumption A1, {() ≥ 0} is a CTMC on eS.Furthermore we make the following observations:
5We change the designation of an activity to i instead of a because we wish to use the a to
designate an ‘active’ activity.
12

1. The state ( ) is absorbing: once the project is completed, it remains com-
pleted.
2. The process {() ≥ 0} visits any state in S at most once; i.e., each activityis executed exactly once. This implies that all states in S are transient.
3. The above two observations imply that the process {() ≥ 0} is a finite-state,absorbing CTMC with a single absorbing state ( ).
We are now ready to introduce the phase type distribution and its properties.
4.2 PHASE TYPE DISTRIBUTIONS
The name ‘phase type’ distribution stems from the fact that an Erlang distribution is
derived as the sum of ‘stages’ or ‘phases’, all exponentially distributed with the same
parameter The generalized Erlang distribution of order m has m phases (stages);
each is exponentially distributed but of possibly different parameters 1 · · · Thefollowing development is abstracted from Neuts [19].
Definition 1 A continuous probability distribution (·) is of the phase type (PH-distribution) if it is the distribution of the time until absorption in a finite-state
Markov process with a single absorbing state; that is, there exists a probability vector
( +1) and an ‘infinitesimal generator matrix’ of the form
Q =
⎡⎣ T× T0×1
01× 01×1
⎤⎦ =
⎡⎣ T −Te0 0
⎤⎦ (7)
where 0 for 1 ≤ ≤ and ≥ 0 for 6=
Also,
Te+T0 = 0
and the initial probability vector (the so-called ‘counting probability’) of Q is given by
the vector¡γ +1
¢ with
γ · e+ +1 = 1
13

The pair (γT) is called the ‘representation’ of (·)
In our case, the process starts in state 0 (project not yet initiated) with probability
1. States 1 are transient so that absorption into state + 1 from any initial
state is certain.
An important result of concern to us is that the matrix T is non-singular (a
necessary and sufficient condition for the states 1 to be transient). Observe
that
T −→ 0 as −→∞
Assuming an initial probability vector¡γ +1
¢ the time to absorption in state
+ 1 corresponding to the initial probability vector is given by
() = 1− γ · T · e for ≥ 0 (8)
Note that the ‘time to absorption’ for the general CTMC translates, in our context,
into the duration of the project, Υ
We now state the following known properties of the distribution (·) and commenton their relevance to our application. For the sake of avoiding confusion we shall
denote the argument of (·) by instead of x, keeping the latter to represent the
intensity of resource allocation.
1. It has a jump of height +1 at = 0 Evidently this is the probability that the
process starts in the absorbing state. This case is of no concern to us since it
implies that the project is complete at its start, which would imply that there
is no project. Therefore for our concern
+1 = 0
2. Its density function () = 0 () on (0∞) ; i.e., excluding the 0 point, isgiven by
() = 0 () = γ · T ·T0 (9)
14

In our case the portion of the domain of is the whole real line including the
point at the origin because +1 = 0
3. The kth non-central moments (about the origin) 0 of (·) are all finite andare given by
0 = (−1) × !¡γT−e
¢ for ≥ 0 (10)
This provides the foundation for securing the moments of the project duration;
see Kulkarni and Adlakha [16] for details.
4.3 EXAMPLE OF THE PI-TYPE PROCEDURE
At the outset we wish to emphasize that the procedure we outline is an approximation
because we are considering the cost of tardiness of the expected project completion
time, which we know is not equal to the expected cost of tardiness of the project
completion time. It is well known that the expected value of the project completion
time is an under-estimate of the exact value, so is the cost based on it. Further, it is
also well known that the values deduced for the various measures of performance as-
suming the exponential distribution are an over-estimate of the real values, whatever
they may be. This is true for the probability distributions we have encountered in
the field of project networks because all of them are in the class NBUE (“new better
than used in expectation” — see Barlow and Proschan [2]). These two effects which
drive the values obtained in opposite directions seem to compensate each other with
the result being remarkably close to the exact values. Extensive numerical experi-
mentation has convinced us that the error committed is insignificant except in one
special circumstance, which will be described later.
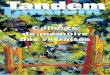
To motivate the statement of the procedure, consider a simple activity network
comprising three activities as shown in Fig. 1. The corresponding ‘state space tran-
sition diagram’ (or ‘state space’ for short) is displayed in Fig. 2. Each node of the
graph identifies a subset of the activities and their status: a for ‘active’ and d for
15

dormant.
Figure 1 here.
Figure 2 here.
The interpretation of the state space is as follows. The initial udc is state (1 3)
which indicates that both activities 1 and 3 are active. If activity #1 finishes first
then activity #2 can be initiated and the new state is (2 3) since activity #3 is
still ‘ongoing’. ‘Control’ — as represented by the arrow — would shift to udc {2 3} However, if activity #3 finishes first then no change in the udc will take place and
the process must wait until activity #1 is completed. Activity #3 remains dormant
during this interval. This is represented in the figure by an arrow leading to state
(1 3) From this latter state ‘control’ can shift only to one other state, namely, the
state in which activity #2 is active while activity #3 remains dormant. This is rep-
resented in the figure by state (2 3) and an arrow leading from (1 3)→ (2 3)
Interestingly enough, state (2 3) can also shift to state (2 3) represented by the
arrow between these two states, if activity #3 finishes before activity #2. The rest
of the figure can be interpreted similarly.
For the sake of concreteness of discussion, assume the unit cost of resource usage
is 1.0 and the cost of tardiness () is 3.0. Let the work content of activities #1, 2,
and 3 be exponentially distributed with parameters 0.2, 0.1, and 0.07, respectively.
Observe that, based on expectations, the expected duration of path over the nodes 1-
2-3 is 102+ 101= 15 while the duration of path 1-3 is 1
007= 1428 Thus the two paths
in this simple project are of almost equal expected duration, and the PERT model
would yield an expected completion time of 15. The exact value of the expected
duration of the project is deduced from the distribution of the time of realization of
16

node 3, which in this case is deduced from the probability distribution of node 3,
3 () =¡1− −007
¢ Z
=0
02−02¡1− −01(−)
¢
=¡1− −007
¢ ¡1− −01
¢2
which yields,
E [Υ3] =
Z ∞
=0
[1− 3 ()] = 2122
The error committed in adopting the PERT value is indeed significant in this case
(amounting to some 41.5%). The density function of Υ3 the time of realization of
node 3, is given in Fig.3.
Figure 3 here.
Let the lower and upper bounds on resource availability for all three activities be
1 and 3,; i.e., 1 ≤ ≤ 3 = 1 2 3. Finally let the due date be 8.
Initialization:
Assume we start at the initial resource allocation vector x0 = [1 1 1]. The corre-
sponding infinitesimal generator matrix is Q0, given by:
Q0 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
−027 02 007 0 0 0
0 −017 0 007 010 0
0 0 −02 02 0 0
0 0 0 −010 0 010
0 0 0 0 −007 007
0 0 0 0 0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦The expected project completion time and various costs are computed as follows:
E (Υ3) = 2122 (obtained using eq. (10)
resource cost = 1×µ1
02+1
01+
1
007
¶= $2929
tardiness cost = 3× (2122− 8) = $3967total expected cost = $6896
17

Achieving Cost Reduction:
We can seek improvement in the total cost by one of the following two methods.
1. Increase the allocation 1 in small increments ∆ (say ∆ = 01) until no further
improvement in the objective value is achieved. We know that an increment ∆
in the resource allocation to activity 1 changes the rate matrix Q0 to
Q1 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
−027−∆ 020 +∆ 007 0 0 0
0 −017 0 007 010 0
0 0 −020−∆ 020 +∆ 0 0
0 0 0 −010 0 010
0 0 0 0 −007 007
0 0 0 0 0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦from which we can obtain the expected project duration using Eq. (??) and
compute the other costs.
Using this functional evaluation one can adopt a suitable iterative scheme in-
corporating a steepest-descent search over possible values of resource allocations
for all activities. In other words,
“Best” Policy :Xbest = x
ÃX∈
E []
!+×({ 0 E [Υ]− })
2. Because of the symmetry between the two paths in the (original) project net-
work (1 = 1 2 and 2 = 3 in which the path is identified by its activities),
suppose we augment the resource allocation to activity 1 so that the expected
lengths of the two paths are equal; i.e., we seek the solution to the equation
1
021+1
01=
1
007
which ⇒ 1 =5
42857= 11667 (11)
Now, select a value of 1 large enough to make the cost larger than at 1 =
11667 then use dichotomous search to find the optimal value. For instance,
18

suppose we select 1 = 15 The new allocation vector X(1) = [15 1 1] results
in the following infinitesimal generator matrix:
Q0(1) =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
−037 03 007 0 0 0
0 −017 0 007 010 0
0 0 −03 03 0 0
0 0 0 −010 0 010
0 0 0 0 −007 007
0 0 0 0 0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦The corresponding expected project completion time and the relevant costs are
as follows.
E(1) (Υ) = 2015 (obtained using Eq 10)
resource cost = 1×µ15× 1
02+1
01+
1
007
¶= $3179
tardiness cost = 3× (2015− 8) = $3644total cost = $6823
Notice that the total cost has decreased.
Let us now continue to increase the allocation to activity 1 further, say to
1.75. The updated completion time and the relevant costs corresponding to the
allocation x(2) = [175 1 1] are:
E(2) (Υ) = 1986 (obtained using Eq 10)
resource cost = 1×µ175× 1
02+1
01+
1
007
¶= $3304
tardiness cost = 3× (1986− 8) = $3558total expected cost = $6862
which is larger than the total cost obtained using X(1). Although the tardiness
cost has been reduced, the reduction has been more than offset by the increase
in the resource cost. Therefore we know that the maximal gain in cost is for
19

some 1 in the interval [150 175] Depending on the desired accuracy, one
may either enumerate the values of 1 in this interval with greater accuracy,
or use dichotomous search, or even use Fibonacci search [30] to determine the
optimum.
Having secured the most improvement from activity 1, we now try changing the
allocation to activity 2 (or 3). If successful, we follow the same procedure with activity
3 (or 2), and so on until no further improvement is possible. Note that subsequent
reductions in cost due to changes in the allocation to either activities 2 or 3 may
induce further improvement in the cost of activity 1.
Our suggested procedure varies the resource allocation one activity at-a-time. We
are confident that such search will always converge to the global optimum because of
the uni-modality of the cost function (1), see below.
Following through with the iterations, the “best” policy for the example network
is x∗ = [15 15 15] with an associated cost of 62.38. Coincidentally, this is also seen
in the Table 1, which actually summarizes part of the solution search process. The
table displays values of total cost as the allocation for activity 3, 3, is varied while
keeping the allocations for activities 1 and 2, (1 2), fixed. The surface plot in Fig. 5
summarizes the table graphically.
Table 1 (Fig. 4) here.
Expected total cost for fixed allocations (1 2) and varying 3.
Figure 5 here.
4.4 THE PI-TYPE ITERATIVE PROCEDURE
In proposing any sequential search procedure one must establish two important prop-
erties:
20

1. the process terminates finitely (for any desired accuracy) at the desired opti-
mum.
2. at termination, the policy obtained and its corresponding value are independent
of the sequence in which the activities were selected. (For instance in the above
example, had we selected activity 2 at the start then proceeded from there,
would we still have reached the same conclusion?)
These two propositions would be easily established if one can demonstrate that
the negative of the reward function
³{}||=1
´= E
"X∈
+ ·max {0Υ− }#
= X∈
E [] + · [max {0Υ− }] (12)
is unimodal in the ensemble of decision variables {}. The first term in (12) is
linear in and therefore convex. It is the second term that is not straightforward
because the impact of changes in ≤ ≤ on the project completion time Υ
is intertwined with other allocations through the inverse of the matrix T (in Eq. 7).
However, one thing is definitely clear: the function max {0Υ− } is monotone non-increasing in each In other words, under strict precedence relations
6 an increase in
from its lower bound to its upper bound can lead only to a shift in the distribution
of Υ towards 0, or stay unchanged. Therefore the function · E [max {0Υ− }]of Eq. 12 is monotonically non-increasing in its argument up to a point (or ridge,
or surface), beyond which it is monotonically non-decreasing (see Fig. 5). If the
increment ∆ is chosen “small enough” then the unique minimal value of (·) mustbe achieved. Observe that there may be a large number of alternate optimal policies
{} that yield the same value. Finally the fact that the decision variables are boundedon both sides ensures the finiteness of the procedure.
The above argument establishes the validity of the following proposition.
6As opposed to ‘generalized precedence relations’, see Elmaghrayb ??.
21

Proposition 2 For the choice of the increment ∆ sufficiently small, the iterative
scheme of Policy Iteration achieves the optimal value and an optimal policy in a
finite number of steps.
We are now ready to state
The Procedure:
1. Use standard PERT calculations to determine the so-called ‘critical path(s)’.
The activities on this ‘critical path(s)’ are the primary candidates for additional
resource allocation.
2. Rank all the activities of the project in the order of the frequency of lying on a
‘critical path’, taking cognizance of the result of step 1.
3. Secure the state space of the project assuming some initial values of the decision
variables {} ; say = ∀ ∈
4. Select an appropriate increment in the resource and denote it by ∆ Increment
the resource allocation to each activity, taken in the specified order, and evaluate
the resulting project cost until it starts to increase.
5. Repeat step 4 as many times as necessary until no further decrease in cost is
realized.
4.5 LIMITATIONS OF THE PI-TYPE APPROACH
We summarize some of the limitations of the “Policy Iteration-type” procedure de-
scribed above.
• In the worst case scenario, if is a completely directed acyclic network (dag)
with nodes and ( − 1)2 arcs, then the state space for is given by
() = − −1, where
=
X=0
2(−)
22

which grows hyper-exponentially as can be seen from the following table.
: 5 10 20 40
() : 162 68,780,544 2.69561E+30 5.4974E+120
Of course this worst case scenario (of a complete acyclic graph) is rarely realized,
if ever. Still, the state space does grow quite fast. Kulkarni and Adlakha [16]
cite a 48-activity network which gave rise to a state space of almost a quarter
of a million states.
• Apart from the rapid increase in the state space, the search space also has the
potential of rapid growth. For instance, assume a project has 40 activities,
and if we select ∆ = 002 with − = 5, we are now potentially looking at
250× 40 = 104 points, where h is the number of repetitions of step 4 of the
procedure, which is a large number if h is large (say ≥ 10).
• The functional evaluation applies only to exponentially distributed r.v.’s. De-viation from the exponential distribution vitiates the whole structure of the
CTMC on which the procedure is based. More on this point later.
• We cannot implicitly incorporate aggregate resource constraints of the formP∈() ≤ ;7 but they have to be explicitly incorporated as part of the
search procedure.
5 CONCLUSIONS
This paper treats the problem of optimal resource allocation assuming uncertainty in
activity work contentW which, for the sake of analytical tractability, was assumed to
be exponentially distributed. Since activity work contents typically do not follow the
exponential distribution, the question naturally arises whether the model constructed
7The abbreviation ‘udc’ refers to ‘uniformly directed cutset’; see Sigal, Pritsker and Solberg ??.
23

(the CTMC) will have to be discarded. Fortunately, the answer is no; the CTMC
model continues to be valid since any distribution of interest to us in this field can
be approximated to any desired degree of accuracy by a ‘phase type’ distribution in
which either all the phases are exponentially distributed with the same parameter
giving rise to the Erlang distribution, or the phases have different parameters
{}=1 giving rise to the Generalized Erlang distribution. In either case, we areback to the CTMC model, but with a vastly expanded state space. Conceptually, the
model presented here remains intact. The approach to effect such representation is
given in Elmaghraby et al [9].
We now outline the challenges ahead in the future course of research in this field
which, in some sense, also represent what we did not treat in this paper.
• We have assumed that the resource availability, denoted by R, is constant overtime. An obvious generalization is to assume time-varying resource availability.
This would entail a radical change in the model of the process since now the
absolute time must be taken into account, which would vitiate the achievement
of optimality considering only changes in the states of the process.
• Our treatment is limited to one critical resource — a rare occurrence in real lifeapplications. Treatment of more than one resource, say three or four critical
resources, is more realistic. The issue here is to achieve ‘balance’ among the
resources in the sense of avoiding idle time of any of them, while simultaneously
respecting the limited availability of each resource.
• We opted to rank the activities according to a heuristic based on the classicalconcept of “critical path” in the sense of the PERTmodel. The question lingers:
Is there a better ranking of the activities so that the variation in the resource
allocation is directed towards the more ‘critical’ activities?
• Our approach can be better focused with considerable gain in computing effi-ciency if the project graph G is series/parallel (s/p); see Valdes, Tarjan and
24

Lawler [28] for detailed description of series/parallel graphs and their recogni-
tion. Unfortunately most of project graphs are non series/parallel. This raises
the issue of “transformation” from a non series/parallel to series/parallel graphs.
The approach of Bein, Kamburowski and Stallmann [3] to effect such transfor-
mation is unacceptable in the domain of interest to us for two good reasons: (i)
it is applicable only to the AoA mode of representation which need not be the
mode in which the project is presented, and the translation of a project network
from the AoN mode to the AoA mode is a formidable problem in its own right;
and, most importantly, (ii) it relies on node reduction (i.e., elimination) which
is inadmissible in our application because of the resultant loss of identity of
the various activities. The issue remains: can one transform a graph from non
s/p into a s/p one with minimal effort in reversing the translation back to the
original graph?
• There is need for effective alternate variance reduction techniques. Past researchhas demonstrated that for simulation involving stochastic activity networks,
variance reduction techniques such as LHS perform better when compared to
elementary random sampling with no regard for variance minimization. These
techniques are easy to implement when the generation of the random variates is
via inverse transformation. However, when random variates are generated via
acceptance-rejection techniques, these methods cannot be used with the same
ease. In the case of activity networks, beta-distributed random variates are
commonly used, and they are generated using the acceptance-rejection method.
Hence the need for improved sampling techniques.
• Can meta-heuristics, and there is a plethora of them, be used to advantage inthis stochastic environment?
These and other issues are the subject of our active research in this field.
25

References
[1] Azaron, A.,Katagiri, H. and Sakawa M. (2007) “Time-cost trade-off via optimal
control theory in Markov PERT networks,” Annals of Operations Research 15,
47-64.
[2] Barlow, R. E. and Proschan, F. (1975) Statistical Theory of Reliability and Life
Testing. Holt, Rinehart and Winston, New York.
[3] Bein, W. W., Kamburowski, J. and Stallmann, M. F. M. (1992). “Optimal reduc-
tion of two-terminal directed acyclic graphs,” SIAM J. Computing 21, 1112-1129.
[4] Birbil. S. I. and Fang, S-C. (2003) “An electromagnetism-like mechanism for
global optimization”, Journal of Global Optimization 25 :263—282.
[5] Demeulemeester, E. L. and Herroelen, W. S. (2002). Project Scheduling: A Re-
search Handbook, Kluwer ,ISBN 1-40207-051-9.
[6] Elmaghraby, S.E. (1964). “An Algebra for the Analysis of Generalized Activity
Networks,” Management. Sci. 10, 494-514.
[7] Elmaghraby, S.E. and Kamburowski, J. (1990). “On Project Representation and
Activity Floats,” Arab. J. Sci. and Eng. 15:4B ; 626-637.
[8] Elmaghraby, S.E. and Morgan, C.D. (2007) “Resource Allocation in Activity
Networks Under Stochastic Conditions: A Geometric Programming-Sampe Path
Optimization Approach,” paper submitted to the Journal of Economics and
Management.
[9] Elmaghraby, S.E., Benmansour, R., Artiba, A.H. and Allaoui, H. (2009) “Ap-
proximation of continuous distribution via the Generalized Erlang Distribution,”
Proceedings of the INCOM conference, Moscow, Russia, May.
[10] Fernandez, A. A. and Armacost, R. L. (1996) “The role of the nonanticipativ-
ity constraints in commercial software for the stochastic project scheduling”,
Computer and Industrial Engineering 31(1/2):233—236.
[11] Golenko-Ginzburg, D. and Gonik, A. (1997) “Stochastic network project schedul-
ing with nonconsummable limited resources”, International Journal of Produc-
tion Economics 48 :29—37.
[12] Gutjahr, W. J., Strauss, C. and Wagner, E. (2000) “A stochastic branch-and-
bound approach to activity crashing in project management”, INFORMS Jour-
nal on Computing 12 :125—135.
26

[13] Herroelen, W.S. and Demeulemeester, E. (1995). “Recent advances in branch-
and-bound procedures for resource-constrained project scheduling problems,”
Proc. Summer School on Scheduling Theory and its Applications, Chapter 12,
259-276, Chretienne. P t al, eds., Wiley, Chichester.
[14] Herroelen, W.S. and Leus, R. (2006) “Project scheduling under uncertainty:
Survey and research potentials,” EJOR 165, 289-306.
[15] Jørgensen, T. and Wallace, S. (1999). “Improving project cost estimation by
taking into account managerial flexibility,” Chapter 3 in Jorgensen, T. Project
Scheduling as a Stochastic Dynamic Decision Problem, NTNU Trondheim, Nor-
way; 85-104. Also appearing as an ‘Extended Abstract’ in Proceeding of PMS98
Workshop, Istanbul, Turkey, July 7-9; 71.
[16] Kulkarni, V. G. and Adlakha, V. G. (1986) “Markov and Markov-Regenerative
PERT networks”, Operations Research 34 :769—781.
[17] Morgan, C. D. and Elmaghraby, S. E. (2007) “Resource Allocation in Activity
Networks: A Geometric Programming Model,” paper accepted for publication,
Journal of Operations and Logistics.
[18] Murty, K. G. (1983) Linear Programming. John Wiley and Sons, New York.
ISBN 047109725X.
[19] Neuts, M. F. (1989) Structured Stochastic Matrices of M/G/1 type and their Ap-
plications. Probability: Pure and Applied - A Series of Testbooks and Reference
Books.
[20] Ramachandra, G. and Elmaghraby, S. E. (2007) “Optimal resource allocation
in activity network: I. The deterministic case”, submitted for publication in IIE
Trans.
[21] Sigal, C. E., Pritsker, A. B. and Solberg, J. J. (1979). ”The Use of Cutsts in
Monte Carlo Analysis of Stochastic Networks”, Math. Comput. Simulation 21,
376-384.
[22] Sobel, M.J., Szmerekovsky, J.G. and Tilson, V. (2009) “Scheduling projects with
stochastic activity duration to maximize expected net present value,” EJOR 198,
697-
[23] Stork, F. (2001) Stochastic Resource-Constrained Project Scheduling. PhD thesis,
Technical University of Berlin , School of Mathematics and Natural Sciences.
[24] Tereso, A. P., Araújo, M. M. and Elmaghraby, S. E. “Adaptive resource alloca-
tion in multimodal activity networks”, IJPE 92 :1—10.
27

[25] Tereso, A. P., Araújo, M. M. and Elmaghraby, S. E. (2003) “Experimental results
of an adaptive resource allocation technique to stochastic multimodal projects”.
Technical report, Universidade do Minho, Guimarães, Portugal.
[26] Tereso, A. P., Araújo, M. M. and Elmaghraby, S. E. (2003) “Basic approxi-
mations to an adaptive resource allocation technique to stochastic multimodal
projects”. Technical report, Universidade do Minho, Guimarães, Portugal.
[27] Tereso, A. P., Araújo, M. M. and Elmaghraby, S. E. (2004) “The optimal resource
allocation in stochastic activity networks via the electromagnetism approach”.
Paper presented in Ninth International Workshop on Project Management and
Scheduling(PMS ’04), Nancy, France, and appearing in the Proceedings of that
conference.
[28] Valdes, J., Tarjan, R., and Lawler, E. (1982). “The recognition of series-parallel
digraphs,” SIAM J. Comp. 11(2), 298-313.
[29] Valls, V., Laguna, M., Lino, P., Perez, A. and Quintanilla, S.(1998) “Project
scheduling with stochastic activity interruptions”. in Project Scheduling: Recent
Models, Algorithms and Applications, Kluwer Academic Publishers, 333—353.
[30] Wilde, D.J. (1964) Optimum Seeking Methods, Prentice-Hall, Englewood Cliffs,
N.J.
[31] Wollmer, R. D. (1985) “Critical path planning under uncertainty”,Mathematical
Programming Study 25, 164—171.
28

2
31
AoA representation.
3
1 2
3 = 0.07
2 = 0.11 = 0.2
UDC 1 UDC 2
Figure 1: Example net: 3 activities.
29

5
3
4
2
1
0
(1a,3a)
(2a,3d)
(2d,3a)(2a,3a)
(1a,3d)
The state space for the three activities project
Figure 2: State Space of 3-activities project.
30

Density Function of Completion Time
0
0.01
0.02
0.03
0.04
0.05
0 10 20 30 40 50 60 70 80
time t
den
sity
f(t
)
Figure 3:
31

Table 1: Expected Total Cost for Fixed Allocations (1 2) and Varying 3.
( x1 , x2 )
87.8684.2980.7178.0476.4275.4475.4477.0281.40(3,3)
84.1180.5477.2875.1773.5072.4772.4073.9178.20(2.75.2.75)
80.3677.1474.6872.5370.8069.7069.5670.9775.16(2.5,2.5)
77.6574.9272.4170.1968.4067.2166.9768.2772.32(2.25,2.25)
75.9373.1570.5768.2966.4165.1364.7765.9369.80(2,2)
74.8872.0469.3967.0265.0463.6463.1364.1167.76(1.75,1.75)
74.8671.9469.2166.7464.6363.0762.3863.1266.48(1.5,1.5)
76.5073.5070.6768.0665.8064.0563.1163.5566.50(1.25, 1.25)
81.1178.0075.0472.2869.8267.8366.5766.5868.96(1,1)
32.752.52.2521.751.51.251
x3
Figure 4:
32

Figure 5:
33

6 APPENDIX:
STOCHASTIC LINEAR PROGRAMMING
6.1 BACKGROUND
Stochastic programming is a framework for modeling optimization problems that
involve uncertainty. The most widely applied and studied stochastic programming
models are the two-stage linear programs; see, for example, Murty [18]. Here the
decision maker takes some action in the first stage, after which a random event occurs
affecting the realization of some parameters of the first stage. A “recourse decision”
is then be made in the second stage that compensates for any bad effects that might
have been experienced as a result of the first stage decision. The optimal policy from
such a model is a single first stage policy and a collection of recourse decisions (a
decision rule) defining which second-stage action should be taken in response to each
random outcome in the first stage. Mathematically, this can be generically stated as:
⎧⎪⎪⎪⎨⎪⎪⎪⎩min + E | ( )|
=
≤ ≤
⎫⎪⎪⎪⎬⎪⎪⎪⎭ (13)
where ⎧⎪⎪⎪⎨⎪⎪⎪⎩ ( ) = min ()
()+ () =
≥ 0
⎫⎪⎪⎪⎬⎪⎪⎪⎭ (14)
In this model are vectors and are matrices, all of the
appropriate dimensions.
The first linear program of (13) minimizes the first-stage direct costs, plus
the expected recourse cost E | ( )| over all of the possible scenarios of the secondstage while meeting the first-stage constraints, = . The recourse cost Q depends
both on x, the first-stage decision, and on the random event . The second LP
34

of (14) describes how to choose () (a different decision for each realization of the
random scenario) that minimizes the cost () subject to some recourse constraint
()+ () = . One important aspect of stochastic programs is that the first-
stage decision, x, is independent of which second-stage scenario actually occurs. This
is called the ‘non-anticipatory property’.
Solution approaches to stochastic programming models are driven by the type of
probability distributions governing the random parameters. A common approach to
handling uncertainty is to define a small number of possible scenarios to represent the
future. In this case it is possible to compute a solution to the stochastic programming
problem by solving a deterministic equivalent linear program represented in (15) by
introducing a different second-stage (vector) y variable for each scenario.
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
min +P
=1
=
+ = ∀ = 1 ≥ 0
≥ 0 ∀ = 1
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭(15)
where is the probability of occurrence of scenario i and L represents the total
number of scenarios chosen. Notice that the non-anticipatory constraint is met in
= . There is only one first-stage decision vector, x, whereas there are L second-
stage decisions, one for each scenario. The first-period decision cannot prefer one
scenario over another and must be feasible for each scenario – that is, =
and + = for = 1 . Since we solve for all the decisions, x and {}simultaneously, we are choosing x to be (in some sense) optimal over all the scenarios.
These problems are typically very large scale LP problems, and so, much research
effort in the stochastic programming community has been devoted to developing algo-
rithms that exploit the problem structure, in particular in the hope of decomposing
large problems into smaller more tractable components. Here convexity is a key
property.
35

When the probability distributions of the random parameters are continuous, or
there are many random parameters, one is faced with the problem of constructing
appropriate scenarios to approximate the uncertainty. One approach to this problem
constructs two different deterministic equivalent problems, the optimal solutions of
which provide upper and lower bounds on the optimal value of the original problem.
An alternative solution methodology replaces each of the random variables by a finite
random sample and solves the resulting (deterministic) mathematical programming
problem as one would do for the finite scenario case. This is often called an ‘external
sampling method ’. Under fairly mild conditions one can obtain a statistical estimate
of the optimal solution value that converges to the optimal solution as the sample
size increases.
Stochastic integer programming models arise when the decision variables are re-
quired to take on integer values. In most practical situations this entails a loss of
convexity and makes the application of decomposition methods problematic. Tech-
niques for solving stochastic integer programming models have been an active research
area for some time now.
6.2 ONTHEAPPLICATIONOF STOCHASTICPROGRAM-
MING TO PROJECT RESOURCE ALLOCATION
Stochastic programming techniques have been applied to projects with probabilistic
activity durations. However, the literature is very sparse for project planning under
resource constraints in which the focus is on minimizing an economic objective. A
notable mention is the work by Valls et al [29] in which stochasticity enters the
picture in a very specific manner. We briefly discuss their model because it provides
a good understanding of the requirements for stochastic programming to be valid in
the context of projects.
They deal with the problem of resource-constrained project scheduling with sto-
chastic activity interruptions, in which they minimize the total expected value of
36

weighted tardiness. Further details of the problem are summarized as follows:
• The project is represented as a graph in the AoA format, where A is the set ofactivities and E is the set of precedence relationships.
• The set of activities, is defined to be the union of two subsets, = ∪,where,
— DA : set of deterministic activities,
— SA : set of stochastic activities; i.e., those that are interrupted for an
uncertain amount of time (initial processing time is known; length of the
interruption and the final processing time are uncertain).
• There are renewable resource types. The availability of each resource type k
in each time period is units, for = 1 .
• Each activity i requires units of resource k in each period for its performance.
• The two parts of the stochastic activities in SA, namely before and after theinterruption, require the same number of units of each resource.
• The processing time of the second part (after the interruption) of a stochasticactivity is independent of the length of the interruption.
From the scheduling perspective, three different situations define a new decision
stage, namely,
(a) beginning of the project,
(b) completion of an activity in or completion of first part of an activity in ,
and,
(c) end of an interruption.
37

At each of the three above stages, one must consider the available resources, the
activities yet to be scheduled, and the precedence relationships in order to make
scheduling decisions. Valls et al [29] transform this problem into a two-stage decision
problem, where, in the first stage they assign a priority to each activity and in the
second stage, upon resolution of the uncertainties of the interruptions, they construct
a schedule using these priorities. Therefore a valid solution representation is any
topological ordering of the graph representation of the project .
Their objective can be stated mathematically as
min
() =X∈
()
where is the probability associated with scenario s and represents the total
weighted tardiness for scenario s — that is,
() =X∈
·max { − 0}
where is the due date of activity j and is the completion time of activity j
under scenario s. Since the completion time of each activity depends on the ordering
, both and the expected tardiness ET also depend on .
The solution procedure implemented by Valls et al is a hybrid algorithm based
on scatter search techniques. The procedure searches for improved solutions by gen-
erating priority ordering and evaluating the quality of the ordering by scheduling
the activities under each scenario.
As can be easily seen, the procedure of Valls et al [29] essentially mimics a two-
stage decision making process. In the first stage the priorities are set and in the
second stage there is a recourse available for adjusting the schedule according to the
resolution of the uncertainties. The non-anticipatory property is retained at all times
because the priorities set in the first stage are not disturbed.
We now present a brief discussion to illustrate why a stochastic programming ap-
proach, similar to the one just presented, cannot be applied to our problem. Consider
38

the simple project (AoA representation) shown in Fig. 6 and assume there is only
one resource of availability R.
Figure 6 here.
We can enumerate the ‘uniformly directed cutsets’ (udc’s) [21] — a cutset in which
all the arrows are directed from the set X that contains the origin node into the set
= − that contains the terminal node — and depict them in a hierarchical graph
as shown in Fig.7. The number within the node represents the activities in a udc and
the number on the arc indicates the completed activity. For instance, consider nodes
{1 2} and {2 3 4} which are joined by an arrow with the number 1 on it. This meansthat when activity 1 in udc {1 2} is completed, the ‘controlling udc’ now becomes{2 3 4}. On the other hand if activity 2 finishes first, then activities 3 and 4 have towait until their predecessor activity, namely activity 1, is completed.
Figure 7 here.
The first problem encountered in this context is the identification of a “stage”. A
stage can be thought of as an epoch in time when one activity has completed and
another activity can start. In our case, a logical possibility would be to consider
activities processed in a udc as a stage. In other words, processing one udc after
another would translate into proceeding stage-wise. As one can see, this itself presents
a very daunting challenge. Currently, most stochastic programs are modeled as two-
stage programs; modeling and solving multi-stage stochastic programs is quite hard.
Apart from the modeling difficulty, there is another issue that needs to be con-
sidered; viz., the non-anticipatory character of the procedure. In other words, the
first-stage decision; namely the assignment of the priority , is independent of which
scenarios occur in the subsequent stages. Defining and interpreting the nature of
39

a decision in a given stage is unclear, thereby making it even more difficult to try
and ensure the non-anticipatory property. In order to understand the intricacy of
the problem, consider a particular scenario related to the example project in Fig.6.
Assume there is an algorithm designed for adaptive resource allocation – that is,
it proceeds stage-by-stage, while performing some sort of ‘look ahead’ action in the
allocation of resources. The graph shown in Fig.7 reveals an interesting problem that
arises in this scheme of adaptive resource allocation. Assume that, in the first stage
we have obtained the vector (∗1 ∗2) that minimizes the expected total cost. We now
‘fix’ the allocation of these two activities and proceed to obtain the optimal values
for the decision variable 3 and 4. When we sample the work content for activities
{1,2,3,4}, we shall know, based on (∗1 ∗2) obtained in the previous step, whether
node 2 or node 3 is realized first. If node 2 is realized first we have to optimize (3 4)
over the updated resource availability, namely − ∗2. On the other hand, if node 3
is realized first we have to wait until activity 1 finishes, then optimize (3 4) over
the original resource availability R. Here comes the dilemma — we have optimized
(3 4) over two different values of resource availability. How do we reconcile these
two results? This will be the case whenever we have two arcs terminating at any
given node in the udc hierarchy graph.
The preceding illustration demonstrates the inapplicability of this type of stochas-
tic programming models to our problem when the udc’s represent the stages. While
this might be the intuitive way to identify a stage in the context of our problem, there
could very well be other ways to model the problem and apply stochastic program-
ming to solve it. We however conjecture that enforcing non-anticipatory constraints
in a sequential decision process such as ours is not possible.
40

Figure 6: An example project of 9 activities.
41

Figure 7: A hierarchical graph of the udc’s (parial).
42