Embed Size (px)
Citation preview

.
Artifacts removal for GLS map makers
Lorenzo Piazzo
University of Rome ”La Sapienza” - DIET Dept.
Internal Report no. 001-04-11 (no. 001, sector 04, year 2011)
and
HiGal Project Internal Report
25 January 2011
Lorenzo Piazzo
DIET Dept. - University of Rome “La Sapienza”.
V. Eudossiana 18, 00184 Rome, Italy.
Tel.: +39 06 44585480
Fax.: +39 06 4873300
E-mail: [email protected]
1

1 Introduction
Map making is the process of constructing an image from a sequence of georeferenced (or skyref-
erenced) data. A map maker is an algorithm employed to perform the process. An excellent
map maker for astronomical images is the one based on the Generalised Least Square (GLS)
approach [1, 2]. Indeed GLS map makers proved effective in removing the noise affecting the
data sequence and have a manageable computational complexity, which makes their use feasible
even on the huge amount of data produced by current days imaging photometers, like the PACS
and SPIRE instruments onboard the ESA Herschel satellite [3]. Furthermore the GLS approach
has nice features from a theoretical point of view. In fact it is a linear algorithm and therefore
amenable to analysis and it can be shown to yield the maximum likelihood (ML) map when
the noise affecting the data is a Gaussian process. However the approach also has a serious
drawback that became apparent when it was employed to process the data gathered within the
HiGal project [4], the aim of which is that of performing a survey of the galactic plane. Namely
it introduces artifacts in the form of crosses or stripes on strong point sources. These artifacts
are annoying and make the resulting images of little interest, which is a pity since, as we said, the
GLS approach is otherwise a very good map maker. Therefore a procedure to cure this problem
is of both theoretical and practical interest. In this report we present two such procedures.
The first one, termed Post-processed GLS (PGLS), is based on an artifact estimation algo-
rithm. Once the artifacts are estimated they can be subtracted from the GLS image to produce
a clean image. The PGLS algorithm is simple and robust. Its computational complexity is
affordable and comparable to that of the GLS map maker itself. The only drawback is that,
when the artifacts are subtracted, some noise is also added to the image. However the noise
increase is normally moderate and the cleaned image is surely more useful than the original GLS
one.
The second one, termed Split GLS (SGLS), is based on splitting the signal into a diffuse
emission plus correlated noise part and a point sources plus white noise part. Then, the diffuse
part is mapped with GLS, the point source part is mapped by simple rebinning and the SGLS
image is obtained by summing the two maps. Also the SGLS algorithm is simple and robust. Its
computational complexity is essentially that of the GLS map maker itself. Also SGLS introduces
some additional noise, but less than PGLS. However the signal seems to be reconstructed not
as well as by PGLS.
The report is organised as follows. We firstly introduce basic concepts concerning the map
making problem, in section 2, and the basic operations needed to explain the PGLS and SGLS
algorithms, which are the rebin and the unroll, section 3, the GLS map making, section 4, and
the median filter, section 5. Next we describe PGLS, in section 6, and SGLS, in section 7.
Section 8 reports the conclusion and some open points.
2 Data, map and pointing
To be specific we consider the map making problem as it arises in the processing of the data
produced by the scan mode of the PACS instrument of the Herschel satellite. The instrument
2

is composed of a grid of Nb bolometers and a scan amounts at pointing the instrument towards
a set of Nk given points in the sky (organised into a grid of parallel lines) and at sampling the
bolometers output at each point. The result is a set of time ordered data (TOD) which will be
denoted by t = {tb,k} for b = 1, ..., Nb and k = 1, ..., Nk, where tb,k is the readout of the b-th
bolometer at the k-th scan point. Each readout is accompanied by a skyreferencing information,
which is a pair (xb,k, yb,k) giving the right ascension and the declination of the readout.
The map making problem is that of constructing an image (map) of the observed sky from the
TOD. The typical approach is that of defining a pixelization of the observed sky, i.e. partitioning
the sky into a grid of Ni ·Nj non overlapping squares (pixels) si,j . The map maker has to produce
a map m = {mi,j} where mi,j is a measure of the flux in si,j , i.e. in the (i, j)-th pixel. We will
see several map makers in the following sections.
To conclude this section let us note that since each readout is skyreferenced and assuming
that the pixellization covers the whole observed sky, we can assign each readout (b, k) to one
and only one pixel. Therefore we can introduce a pointing function Pb,k yielding the pixel (i, j)
where the readout (b, k) was taken. In other words Pb,k = (i, j) if and only if (xb,k, yb,k) ∈ si,j .
Conversely, for each pixel (i, j) we can consider the (possibly void) set of readouts falling in the
pixel and denote this set by Ci,j . Formally we have Ci,j = {(b, k)|Pb,k = (i, j)}. Furthermore
we will denote by |Ci,j | the number of elements of Ci,j , that is the number of readouts falling in
pixel (i, j).
3 Rebinning and unrolling
Rebinning is a simple and important map making technique where the value of each pixel is set
equal to the mean value of all the readouts falling in the pixel. Namely, the map is computed as
mi,j =1
|Ci,j |
∑
(b,k)∈Ci,j
tb,k.
Rebinning is simple, robust and computationally cheap. It does not require any prior knowledge
about the noise affecting the TOD. Moreover, it is also the optimum solution when the TOD is
a made by a signal affected by zero mean, white noise, in the sense that it yields the ML map
and maximises the SNR. However when the noise affecting the TOD is coloured, rebinning is no
more optimum. Unfortunately the bolometers are typically affected by coloured noise, having
a power spectrum that grows as 1/f for f → 0. As a result the maps obtained by rebinning
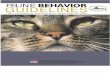
the TOD are not of good quality. An example is shown in figure 1, where the rebinning for a
patch of tile L323 in the PACS blue band is shown. The effect of the 1/f noise is apparent and
manifests itself as stripes following the scan directions. Nevertheless rebinning is an important
tool in map making and it will be useful in the following.
A second operation that we will need in the following is the unrolling of a map into a TOD.
This operation assumes that a map m is given and that the pointing function Pb,k is assigned.
It then produces the TOD data by unrolling the map onto the TOD. Specifically, the data of
each readout is set equal to value of the pixel where the readout falls. Therefore, the unrolled
TOD is given by tb,k = mPb,k.
3

100 200 300 400 500 600 700 800 900 1000
100
200
300
400
500
600
700
800
900
1000
Figure 1: Example of rebinning from a TOD of PACS blue, tile L323. Note the stripes due to
the 1/f noise.
Notation: we will write m = R(t) to indicate that the map m is obtained by rebinning the
TOD t and we will write t = U(m) to indicate that the TOD t is obtained by unrolling the map
m.
4 GLS map making
GLS map making, in its simplest form, is based on the following model for the TOD
t = U(m) + n (1)
where n = {nb,k} is a noise affecting the TOD. The last equation models the TOD as obtained
by unrolling a map (the sky) onto a TOD and by adding noise to it. Based on this model, the
approach exploits the GLS technique and seeks for a map mg minimising the weighted sum of the
4

100 200 300 400 500 600 700 800 900 1000
100
200
300
400
500
600
700
800
900
1000
Figure 2: Example of GLS map. Tile L323 for the PACS blue band. Note the crosses centered
on the strong point sources.
squared noise estimate, given by t−U(mg). By properly selecting the weights and, specifically,
by setting them based on the noise covariance matrix, one can show that the resulting map mg
is the minimum variance linear estimator of m [1]. Furthermore, when the noise is Gaussian,
mg is also the ML estimate of m [1, 2].
GLS map making is a sophisticated and effective map making technique. While it is more
complex than the rebinning, its computational complexity can be kept manageable by exploiting
the Conjugate Gradient [5] approach to obtain the solution map [1, 2]. It requires the knowledge
of the noise correlation properties or, what is equivalent, of the noise power spectrum. However
simulations show that it is robust to a mismatch between the spectrum employed in the solution
and the actual spectrum. Its main advantage is that it keeps into account the noise correlation
and is therefore capable of removing the 1/f noise and of producing much better maps than
the rebinning. However it also has a major drawback, namely that it introduces artifacts in the
5

form of crosses centered on bright point sources, with arms parallel to the scan directions. An
example of GLS map is shown in figure 2 where one notes both the absence of the stripes due
to the 1/f noise and the artifacts.
The artifacts are due to the fact that the model of (1) is not correct and neglects several
important facts. The core mismatch of the model from the actual physical process is that the
TOD is not produced by unrolling a pixellised sky. On the contrary it is produced by taking
samples over a continuous sky. This mismatch is not a problem when the sky is a smooth, slowly
varying image, like happens with diffuse emissions or large, wide sources. However for pointed,
bright sources the mismatch is relevant. Two additional mismatches are 1) the fact that the in
the PACS instrument, in order to improve the SNR while reducing the data rate, the TOD are
obtained by coadding and subsamplig an higher resolution TOD, and 2) the fact that the TOD
is affected by a small Relative Pointing Error (RPE). By means of simulations it was verified
that any of these three factors causes the artifacts observed in the GLS maps.
To conclude let us note that, in principle, the model of (1) can be improved to obtain an
artifact-free GLS approach. This can be done also in practice, at least approximately, for the
artifacts due to the RPE, which can be estimated [6] and removed. And for the artifacts due to
the coaddition, following the approach proposed in [7]. However improving the model to keep
into account the continuous nature of the sky would require to change the pointing matrix used
in the implementation of the GLS algorithm [1, 2] from a sparse one to a fully populated one.
Such a change would increase the computational complexity of the GLS algorithm dramatically,
making it unfeasible with current days processing power.
Notation: we will write m = G(t) to indicate that the map m is obtained by GLS map
making from the TOD t.
5 Median filtering
Consider a sequence xn and assume an integer w is given. Denote by med(a1, ..., aN ) the median
of N numbers [a1, ..., aN ]. Then we can define the median filtering (with window length W =
w + 1) of the sequence xn, denoted by M(xn), as the sequence yn obtained as
yn = M(xn) = med(xn−w, ..., xn+w).
In words, yn is the median of the values [xn−w, ..., xn+w]. The sequence yn will be termed the
median of xn. We can also define the residual filtering (with window length W = 2w+1) of the
sequence xn, denoted by M(xn), as the sequence zn obtained as
zn = M(xn) = xn −M(xn)
The sequence zn will be termed the residual of xn.
Median and residual filtering are two key operations in the algorithms to be developed in the
rest of this report. Unfortunately they are non linear and therefore difficult to analyse. However
it is possible to gather a qualitative understanding of their functioning. To this end consider
firstly a deterministic signal and note that short signals, like pulses with duration less than w,
6

will be entirely removed by the median filtering and entirely preserved by the residual filtering.
On the other hand slowly varying signals, with a duration higher than w, will be preserved by
the median filtering and will be removed by the residual filtering. Therefore, we expect that
when median and residual filtering are applied to a signal TOD, diffuse emission will be moved
to the median and point sources will be moved to the residual.
Consider now the filtering of a noise process. One expects that high frequency, fastly varying
harmonic components, with a period lower than w, will be removed by the median filtering and
preserved by residual filtering. On the contrary low frequency harmonics will be preserved by
the median filtering and removed by the residual filtering. Therefore when the filtering is applied
to a noisy TOD, the low frequency noise will be moved to the median and the high frequency
noise will be moved to the residual.
In summary, roughly, one can consider the median filtering as a low pass filtering and expect
that the signal at its output is slowly varying and highly correlated. On the other hand, thinking
to the residual filtering as an high pass filtering is not entirely correct, since low frequency
components are reduced but not really removed from the residual. However the residual will be
fastly varying and weakly correlated. Therefore the residual filtering acts like a whitening filter.
To conclude note that median and residual filtering can be computationally demanding. A
way to reduce the computational complexity is that of performing a subsampling of the median
signal, i.e. compute the sequence hm = ymS where S ≥ 1 is the subsampling factor (or the step).
Then the median yn can be approximated by a sequence yn obtained by linear interpolation of
the samples of hm. And the residual zn can be approximated by the sequence zn = xn − yn.
As long as S << W the approximation will be good and the computational complexity of the
filtering is reduced by a factor S.
Notation: with a slight abuse, we will write f = M(t) to indicate that the TOD f is
obtained by median filtering each bolometer of the TOD t (properly zero padded so that the
size of f is identical to that of t). Similarly we will write r = M(t) to indicate that the TOD r
is obtained by residual filtering each bolometer of the TOD t (again properly zero padded).
6 PGLS map making
The Post-processed GLS (PGLS) map making algorithm starts from the original TOD t and the
GSL map mg = G(t). It is based on the following basic step aimed at producing an estimate of
the artifacts affecting the GLS map:
1. Unroll the GLS map: tg = U(mg).
2. Remove signal TOD: tn = tg − t.
3. Remove correlated noise: tw = M(tn).
4. Compute artifacts estimate ma = R(tw).
The functioning of the basic step can be qualitatively explained as follows. The original TOD
contains the signal S, the correlated noise Nc and the white noise Nw, so that, using the symbol
≈ to indicate the components of a signal, we can write t ≈ S + Nc + Nw. Assuming that the
7

100 200 300 400 500 600 700 800 900 1000
100
200
300
400
500
600
700
800
900
1000
Figure 3: Example of PGLS map. Note the absence of artifacts and the noise increase.
GLS map maker perfectly removes the noise but introduces artifacts, mg contains the signal S
and the artifacts A and we write mg ≈ S + A. The same components are there in the unrolled
TOD computed in step 1, i.e. tg ≈ S + A. By subtracting the original TOD from tg in step
2 we are left with a TOD tn where the signal is removed, the noise is changed polarity and
the artifacts are introduced, i.e. tn ≈ A − Nc − Nw. By performing the median filtering of tn,
provided that the window length is chosen as discussed next, we eliminate the correlated noise
while the artifacts are preserved since they are point sources, i.e. tw ≈ A − Nw. By rebinning
tw we eliminate the white noise so that ma ≈ A.
The basic step just described produces a rough estimate of the artifacts but it is not sufficient
to have a good estimate. However the procedure can be iterated in order to improve the artifact
estimate. We have therefore the following PGLS algorithm for producing the PGLS map mp
from the TOD t:
1. Init PGLS map: mp = G(t).
8

100 200 300 400 500 600 700 800 900 1000
100
200
300
400
500
600
700
800
900
1000
Figure 4: Example of artifacts map.
2. Repeat 2.1 - 2.5 until convergence:
2.1 Unroll: tg = U(mp).
2.2 Remove signal: tn = tg − t.
2.3 Remove correlated noise: tw = M(tn).
2.4 Estimate artifacts: ma = R(tw).
2.5 Improve PGLS map: mp = mp −ma.
The rationale of the iterative procedure is that, at each step, more artifacts are removed from
the map and eventually the PGLS map is obtained.
Results on real data. Examples of the PGLS map mp and of the total artifacts (i.e. the
sum of all the maps ma produced in step 2.4) are shown in figures 3 and 4 respectively. One
notes that the artifacts are perfectly removed. However, by comparing with figure 2 one also
notes that, where the signal is absent, the noise is higher in the PGLS map than in the GLS one.
This is expected since the artifact map ma is not noise free and every time that it is subtracted
9

to mp in step 2.5 its noise adds to the PGLS map. This noise increase is a price to pay to remove
the artifacts.
Results on simulated data. By using a system simulator we also tested PGLS map
making on artificial data. The greatest advantage of using a system simulator is that one knows
the target image and can verify how the algorithm approximates it. Using this approach we
verified that when the PGLS is fed with a noiseless TOD, it produces exactly (within numerical
precision limits) the target image, while the GLS does not.
Parameters and complexity. The only parameter of the procedure is the window length
of the median filter of step 2.3. This should be set at least equal to twice the width of the arms
of the crosses to be removed. Higher values uselessly pass more correlated noise into the artifact
estimation while lower values reduce the quality of the estimation. However this parameter is
not critical and the procedure works well in a wide range of window lengths. In the examples on
real data given above the window length was set to 81 pixels. Furthermore the computational
complexity was reduced by using a step of 20 pixels in the median filtering. Another point to
be discussed is how determine the convergence. Again, it turns out that this is not a critical
point and that any meaningful criterion can be used. In the examples given we simply carried
out 8 iterations. All in all the PGLS procedure is quite robust and effective. Its computational
complexity is comparable to that of the original GLS.
7 SGLS map making
The Split GLS (SGLS) map making algorithm starts from the original TOD t and splits it
into a correlated and a white part. Namely it performs a median filtering of t to produce a
correlated TOD tc containing the diffuse emission and the correlated noise. In then performs
residual filtering of t to produce a white TOD tw containing point sources and white noise.
The correlated TOD can be safely processed by the GSL map maker since it contains no point
sources: one obtains a correlated map mc = G(tc). The white TOD can be safely rebinned since
it contains no correlated noise: one obtains a white map mw = G(tw). The final SGLS map is
obtained by summing the correlated and white maps. In summary we have the following SGLS
algorithm:
1. Extract correlated TOD: tc = M(t).
2. Extract white TOD: tw = M(t).
3. Compute correlated map: mc = G(tc)
4. Compute white map: mw = R(tw)
5. Compute SGLS map: ms = mc +mw
Results on real data. An example of the SGLS map ms is shown in figure 5. One notes
that the artifacts are perfectly removed. Again, by comparing with figure 2 one notes that,
where the signal is absent, the noise is higher in the SGLS map than in the GLS one. This
is expected since the rebin performed in step 4 is not capable of removing the correlated noise
that leaks into the white TOD due to the non perfect suppression of this noise by the residual
10

100 200 300 400 500 600 700 800 900 1000
100
200
300
400
500
600
700
800
900
1000
Figure 5: Example of SGLS map.
filtering. This is a price to pay to remove the artifacts. However, by comparing with figure 3 one
also notes that the additional noise is lower than the additional noise introduced by the PGLS
approach. This is due to the fact that there is no iterative increase of the noise in the SGLS
approach.
Results on simulated data. Using a system simulator we verified that when the SGLS
is fed with a noiseless TOD, it does not produce exactly the target image but only a good
approximation. This is the disadvantage of SGLS with respect to PGLS. In any case the SGLS
estimate is much better than the GLS one.
Parameters and complexity. The only parameter of the procedure is the window length
of the median and residual filters. This should be set at least equal to twice the width of the point
sources that produce artifacts. Higher values will remove artifacts but will uselessly pass more
correlated noise into the white map. Lower values will jeopardize the artifacts removal. In the
example on real data given above the window length was set to 81 pixels and the computational
11

complexity was reduced by using a step of 20 pixels in the filtering. All in all the SGLS procedure
is quite robust and effective. Its computational complexity is comparable to that of the original
GLS.
8 Conclusion and future work
We presented PGLS and SGLS which are two GSL-based map makers capable of suppressing
the artifacts introduced by the GLS while retaining most of the noise removal capabilities of
the GLS. Both algorithms are simple, robust and have a computational complexity similar to
that of the original GLS. With respect to GLS, both algorithms slightly increase the noise in
the final image. The noise increase is higher for the PGLS than for SGLS but the PGLS seems
capable of better treating the signal part.
Future work shall be aimed at better characterizing the signal reconstruction capabilities of
PGSL and SGLS. This shall be done by comparing their results on simulated data, where the
target image is known. A large simulation campaign is needed.
A second, promising research line is that of performing some signal processing of the artifacts
image (see figure 4) in order to automatically identify the artifacts position and dimension. When
this is done, the PGLS map could be produced from the GLS map by subtracting the artifacts
only, thereby avoiding the noise increase.
References
[1] P. Natoli, G. De Gasperis, C. Gheller, N. Vittorio, ”A map-making algorithm for the Planck
surveyor”, Astronomy and Astrophysics 372 (1), pp. 346-356, 2001.
[2] C. M. Cantalupo, J. D. Borrill, A. H. Jaffe, T. S. Kisner, R. Stompor, ”MADmap: A
massively parallel maximum likelihood cosmic microwave background map-maker”, Astro-
physical Journal, Supplement Series 187 (1), pp. 212-227, 2010.
[3] G. Pilbratt et al., ”Herschel Space Observatory”, Astronomy and Astrophysics, Vol. 518,
No. 7-8, July 2010.
[4] S. Molinari et al.: ”Clouds, filaments, and protostars: The Herschel Hi-GAL Milky Way”,
Astronomy and Astrophysics, Volume 518, Issue 3, 16 July 2010
[5] W. T. Vetterling, W. H. Press, S. A. Teukolsky, and B. P. Flannery, ”Numerical Recipes in
C”, Cambridge University Press, 1992.
[6] L. Piazzo et al., ”Study of the PACS and SPIRE Pointing Error”, HI-GAL Internal Report,
10 July 2010.
[7] F. Piacentini et al., ”Map making for PACS in HI-GAL”, HI-GAL Internal Report, 4 July
2009.
12