Embed Size (px)
Citation preview

978-1-7281-0429-4/19/$31.00 ©2019 IEEE
Assessment of upper limb muscle synergies forindustrial overhead tasks: a preliminary study
S. Grazioso1, T. Caporaso1, A. Palomba2, S. Nardella1, B. Ostuni1, D. Panariello1, G. Di Gironimo1, A. Lanzotti11Fraunhofer JL IDEAS, Department of Industrial Engineering, University of Naples Federico II, Naples, Italy
2Department of Medical and Surgical Specialties and Dentistry, University of Campania Luigi Vanvitelli, Naples, ItalyCorresponding author: [email protected]
Abstract—Advanced measurement systems and techniquesfrom neuroscience are used in this work to extrapolate reduced–order muscle activation patterns corresponding to the executionof overhead tasks classic of automotive industry. The approachis based on the analysis of electromyographic (EMG) signalsmeasured from muscles of the upper limb. The preliminaryexperiments show that, for the selected tasks, one muscle synergycould account for > 98% of the total muscle activation. Thisapproach might pave the way towards the development of bionic,synergy–based upper limb wearable robots for augmenting hu-man performances in industrial workplaces.
Index Terms—EMG, muscle synergies, wearable robots
I. INTRODUCTION
Robotic exoskeletons represent a class of robot that can beused in industry to reduce the physical loading on the workers’body. They are physically attached to the human and performtasks closely to them. In the view of developing roboticexoskeletons that can augment the human performances whilebeing less invasive for the workers, recently has pointed outthat a new radical design philosophy is required [1]. Followingthe recent trend of humanization of factories1, detailed studieson the biomechanical behavior of humans will play a growingrole in the design of next generation of powered exoskeletons.A critical challenge is integrating the motion of the roboticexoskeleton with the motion of the human. An ideal scenariowould foresee a coordinated control of humans and robots,where they are seen as an integrated system even if they arebiologically uncoupled. Therefore, it is highly desirable tofind a way such that the motion of the robotic exoskeletonis perceived as natural by the humans.A possible solution to this problem can be found by recallingthe neuroscience concept of biological synergies, which datesback to 1967 [2]. In the context of motor control, synergiesare defined as groups of muscles jointly activated by a singlecentral control signal [3]. Controlling this coherent activationof the muscle group is much more efficient than controllingall the redundant muscles independently [4]. Through thesequencing and superposition of a limited number of themuscle synergies, a large variation of complex movements canbe achieved [5].
1https://www.robotics.org/
The gold example of studying synergies for robotic applica-tions is in the design and control of rigid and soft prosthetichands. Starting from the pioneer work on assessment ofpostural hand synergies [6], several synergy–based robotichands have been developed [7], [8]. As result, these prosthetichands can reproduce complex movements by reproducing onlythe first (and eventually the second) hand synergies, whilesimplifying the control of a multi degrees–of–freedom systemas an artificial hand.
Following these previous studies on the hand, here we proposea preliminary study for the assessment of upper limb musclesynergies. Since our vision is to assist workers in repetitiveindustrial tasks, we extract the synergies from overhead taskstypical of the automotive industry [9]. To the best of theauthors’ knowledge, this is the first time that muscle synergiesare extracted with the aim to enhance the design process ofupper limb exoskeletons for industrial overhead tasks. Thispreliminary research could have impact in the synergy–drivendesign and control of the next generation of powered upperlimb rigid and soft exoskeletons.
A. Related work
In this part we briefly review the most common techniquesfor muscle synergies extraction. According to [10], threemodels are usually used for extraction of EMG synergies:(i) synchronous synergies; (ii) temporal synergies; (iii) time-varying synergies. In the first model, the total muscles behaviorresults from a linear combination of muscles activation. Here,no temporal delay is allowed between different muscles; if asynergy is activated, at the same time all muscles belonging tothat synergy are actives [11]. In the second model, for everymuscle, a different temporal structure is specified by scalingcoefficients [11]. In the third model, the spatial componentallows the balance of activations across the muscles and thetemporal one allows delays between muscles within the samesynergy [4], since each muscle has a fixed temporal profile.In this work, we use the synchronous model for its simplicityand for the appropriateness with the selected industrial tasks.
89

TABLE I
OVERHEAD TASKS
No Name Tool Tool weight [g]1 Screwing Screwdriver 402 Leverage 1 Wrench 853 Leverage 2 Wrench 6904 Drilling Drill 2000
II. MATERIALS AND METHODS
A. Experimental tasks
One right–hand, male, volunteer subject participated to thepreliminary experiments. A physician collected the informedconsent from the volunteer as well as his personal detailsand anthropometric characteristics (age: 28 years; mass: 83kg; height: 1.72 m). Before starting tests, the subject wasasked to perform isometric work against resistance in orderto achieve the maximum voluntary contraction for each con-sidered muscles. In this preliminary study, we consider thefollowing overhead tasks:
• Drilling: the subject is with the right hand above his headfor 5 seconds (working posture) and 3 seconds with thearm below the shoulder (reset posture) while having adrill in his dominant hand.
• Screwing: the posture is similar to previous one; theexecution time is 10 seconds in working posture and 4seconds in reset posture, while handling a screwdriver.
• Leverage: the posture is similar to previous one; theexecution time is 7 seconds in working posture and 4seconds in reset posture, while handling a wrench.
A total of four different tasks with different tools wereperformed, as indicated in Table I. For each task, three trialswere conducted. Each trial consisted in five work cycles. Awork cycle is defined as a two phase period split in an overheadholding phase alternated to a resting phase. The ratio betweenthe holding and resting phases has been chosen differentlyaccording to the tools weight, ensuring a duty cycle rangingin a [60-75]% interval. The order in which the tasks wereperformed was chosen so as to ensure that the subject couldnot get trained to an increasing (or decreasing) variation ofthe employed tools weight.
B. Experimental protocol
The muscle activation was measured by six EMG sensors(FREEEMG 1000, BTS Bioengineering, Milan, Italy) placedon the upper limb following the recommendations given bythe SENIAM project2. The EMG sensors were placed bya physician in correspondence to the six muscles: uppertrapezium (M1); anterior deltoid (M2); medial deltoid (M3);rear deltoid (M4); biceps brachii (M5); long head of thetriceps (M6). Figure 1 shows the EMG sensors placed onthe subject’s body. Notice that this picture also shows somemarkers placed for a complementary study regarding a motioncapture analysis. As illustrative example, Fig. 2 shows two
2http://www.seniam.org/
Fig. 1. EMG sensors on the subject’s body.
Fig. 2. Reset posture (left) and working posture (right) for the drilling task.
snapshots of the subject while being in the reset and workingpostures for the drilling task.
C. Experimental analysis
1) Muscle activation curves: The EMG signals were ac-quired using the software BTS SMART Capture (BTS Bio-engineering, Milan, Italy). Then, the measured EMG signalwas processed with the following steps: (i) rectification; (ii)smoothing with a moving average filter (with time constantof 150 ms); (iii) filtering using a Butterworth low–pass filterwith a cut frequency of 2 Hz; (iv) normalization with respectto the maximum voluntary contractions previously recorded.This processing phase was done using BTS SMART Analyzer(BTS Bioengineering, Milan, Italy). In this way it was possibleto obtain the activation signal for each muscle, for all the trialsof the tasks.
90
2) Synergies extraction: The synergies extraction pro-
cess [12] consists in finding two matrices W and C fromthe normalized muscle activation E such that the Frobeniusnorm (|| · ||F ) is minimized as
min||E −WC||F , withW ≥ 0, C ≥ 0 (1)
where the normalized muscle activation curve for each muscleis put equal to E = WC + e ∈ Rp×n, being p the numberof muscles and n the temporal instants; e ∈ Rp×n is theerror matrix; W ∈ Rp×s with s the number of synergies;C ∈ Rs×n. Simply speaking, minimizing the Frobenius normin (1) means forcing the elements in the error matrix e to zero.For the minimization problem, we use the non–negative matrixfactorization algorithm (NMF), originally proposed in [13].The synergies identified by NMF are time invariant non–negative vectors whose linear combination is found, throughan iterative update rule, to minimize the error of EMG recon-struction [14]. A basic assumption of this method considersthe error following a Gaussian distribution [15]. The choiceof the number of synergies is done by computing the varianceaccounted for (V AF ) coefficient, for all the muscles (V AFt)and each muscle individually (V AFm) as
V AFt = 1−∑pi=1
∑nj=1(ei,j)
2
∑pi=1
∑nj=1(Ei,j)
2(2)
V AFm = 1−∑nj=1(em,j)
2
∑nj=1(Em,j)
2(3)
The literature uses a V AF value of 90% [16] to select thenumber of synergies of interest.
III. RESULTS AND DISCUSSION
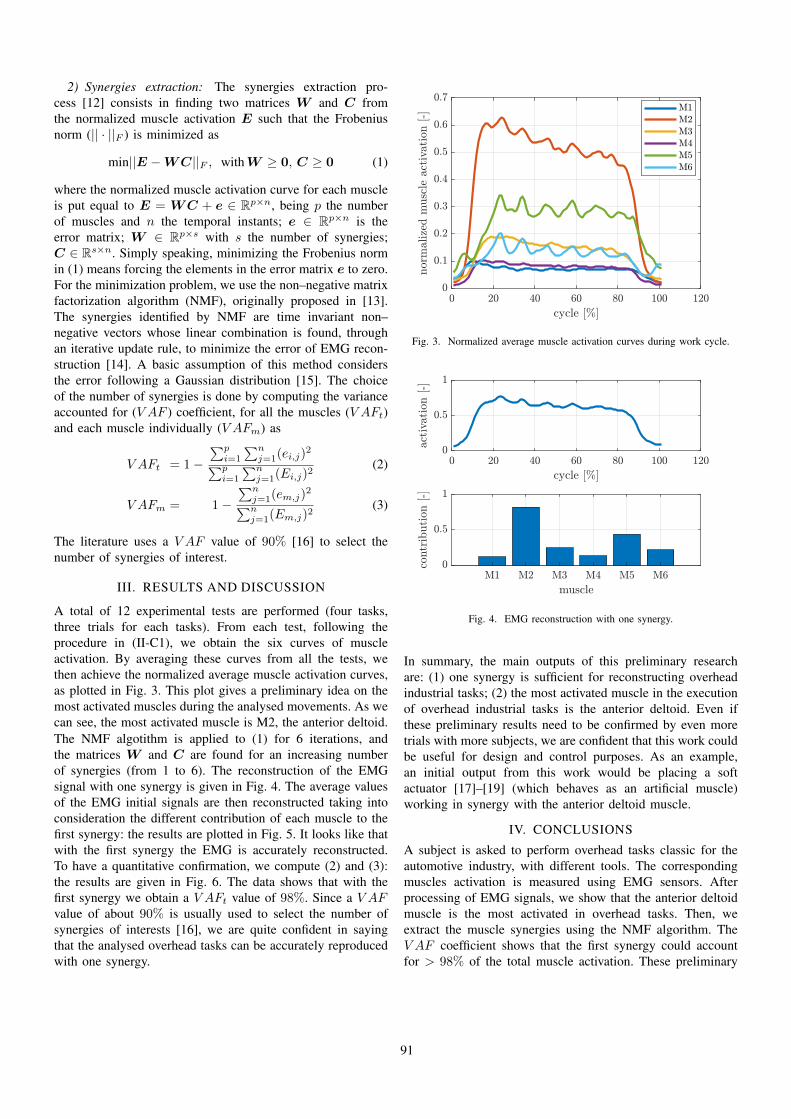
A total of 12 experimental tests are performed (four tasks,three trials for each tasks). From each test, following theprocedure in (II-C1), we obtain the six curves of muscleactivation. By averaging these curves from all the tests, wethen achieve the normalized average muscle activation curves,as plotted in Fig. 3. This plot gives a preliminary idea on themost activated muscles during the analysed movements. As wecan see, the most activated muscle is M2, the anterior deltoid.The NMF algotithm is applied to (1) for 6 iterations, andthe matrices W and C are found for an increasing numberof synergies (from 1 to 6). The reconstruction of the EMGsignal with one synergy is given in Fig. 4. The average valuesof the EMG initial signals are then reconstructed taking intoconsideration the different contribution of each muscle to thefirst synergy: the results are plotted in Fig. 5. It looks like thatwith the first synergy the EMG is accurately reconstructed.To have a quantitative confirmation, we compute (2) and (3):the results are given in Fig. 6. The data shows that with thefirst synergy we obtain a V AFt value of 98%. Since a V AFvalue of about 90% is usually used to select the number ofsynergies of interests [16], we are quite confident in sayingthat the analysed overhead tasks can be accurately reproducedwith one synergy.
Fig. 3. Normalized average muscle activation curves during work cycle.
Fig. 4. EMG reconstruction with one synergy.
In summary, the main outputs of this preliminary researchare: (1) one synergy is sufficient for reconstructing overheadindustrial tasks; (2) the most activated muscle in the executionof overhead industrial tasks is the anterior deltoid. Even ifthese preliminary results need to be confirmed by even moretrials with more subjects, we are confident that this work couldbe useful for design and control purposes. As an example,an initial output from this work would be placing a softactuator [17]–[19] (which behaves as an artificial muscle)working in synergy with the anterior deltoid muscle.
IV. CONCLUSIONS
A subject is asked to perform overhead tasks classic for theautomotive industry, with different tools. The correspondingmuscles activation is measured using EMG sensors. Afterprocessing of EMG signals, we show that the anterior deltoidmuscle is the most activated in overhead tasks. Then, weextract the muscle synergies using the NMF algorithm. TheV AF coefficient shows that the first synergy could accountfor > 98% of the total muscle activation. These preliminary
91
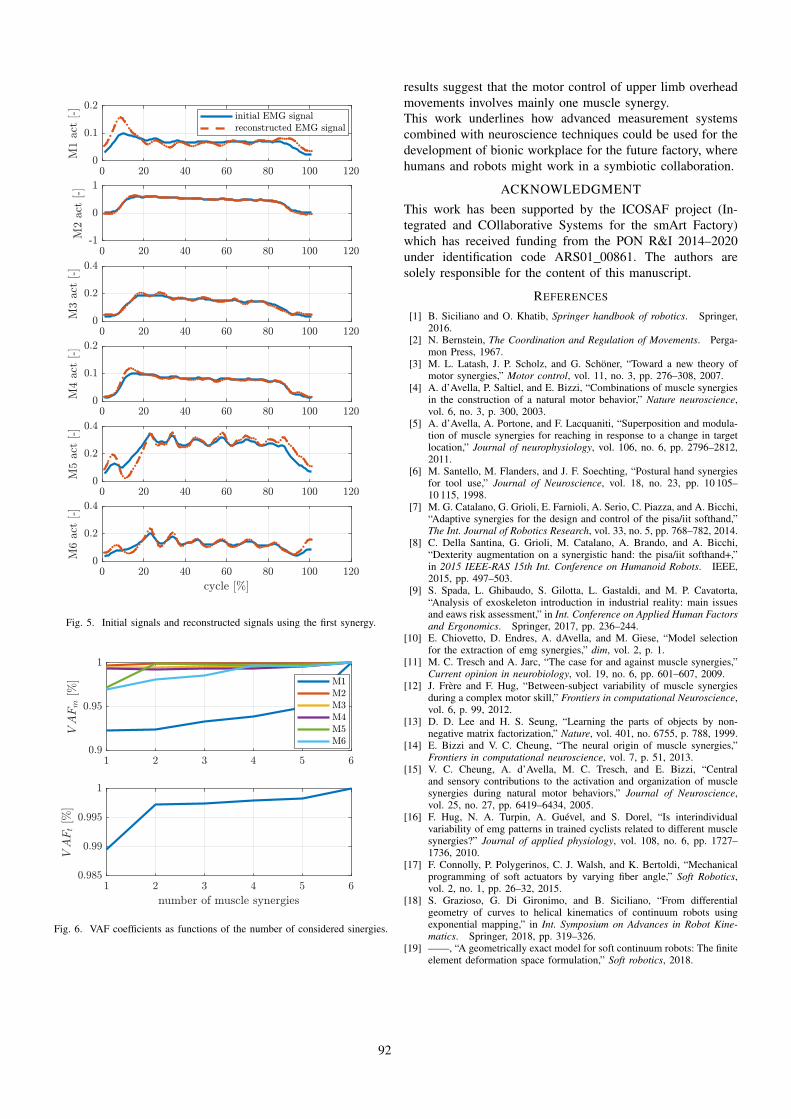
Fig. 5. Initial signals and reconstructed signals using the first synergy.
Fig. 6. VAF coefficients as functions of the number of considered sinergies.
results suggest that the motor control of upper limb overheadmovements involves mainly one muscle synergy.This work underlines how advanced measurement systemscombined with neuroscience techniques could be used for thedevelopment of bionic workplace for the future factory, wherehumans and robots might work in a symbiotic collaboration.
ACKNOWLEDGMENTThis work has been supported by the ICOSAF project (In-tegrated and COllaborative Systems for the smArt Factory)which has received funding from the PON R&I 2014–2020under identification code ARS01 00861. The authors aresolely responsible for the content of this manuscript.
REFERENCES
[1] B. Siciliano and O. Khatib, Springer handbook of robotics. Springer,2016.
[2] N. Bernstein, The Coordination and Regulation of Movements. Perga-mon Press, 1967.
[3] M. L. Latash, J. P. Scholz, and G. Schoner, “Toward a new theory ofmotor synergies,” Motor control, vol. 11, no. 3, pp. 276–308, 2007.
[4] A. d’Avella, P. Saltiel, and E. Bizzi, “Combinations of muscle synergiesin the construction of a natural motor behavior,” Nature neuroscience,vol. 6, no. 3, p. 300, 2003.
[5] A. d’Avella, A. Portone, and F. Lacquaniti, “Superposition and modula-tion of muscle synergies for reaching in response to a change in targetlocation,” Journal of neurophysiology, vol. 106, no. 6, pp. 2796–2812,2011.
[6] M. Santello, M. Flanders, and J. F. Soechting, “Postural hand synergiesfor tool use,” Journal of Neuroscience, vol. 18, no. 23, pp. 10 105–10 115, 1998.
[7] M. G. Catalano, G. Grioli, E. Farnioli, A. Serio, C. Piazza, and A. Bicchi,“Adaptive synergies for the design and control of the pisa/iit softhand,”The Int. Journal of Robotics Research, vol. 33, no. 5, pp. 768–782, 2014.
[8] C. Della Santina, G. Grioli, M. Catalano, A. Brando, and A. Bicchi,“Dexterity augmentation on a synergistic hand: the pisa/iit softhand+,”in 2015 IEEE-RAS 15th Int. Conference on Humanoid Robots. IEEE,2015, pp. 497–503.
[9] S. Spada, L. Ghibaudo, S. Gilotta, L. Gastaldi, and M. P. Cavatorta,“Analysis of exoskeleton introduction in industrial reality: main issuesand eaws risk assessment,” in Int. Conference on Applied Human Factorsand Ergonomics. Springer, 2017, pp. 236–244.
[10] E. Chiovetto, D. Endres, A. dAvella, and M. Giese, “Model selectionfor the extraction of emg synergies,” dim, vol. 2, p. 1.
[11] M. C. Tresch and A. Jarc, “The case for and against muscle synergies,”Current opinion in neurobiology, vol. 19, no. 6, pp. 601–607, 2009.
[12] J. Frere and F. Hug, “Between-subject variability of muscle synergiesduring a complex motor skill,” Frontiers in computational Neuroscience,vol. 6, p. 99, 2012.
[13] D. D. Lee and H. S. Seung, “Learning the parts of objects by non-negative matrix factorization,” Nature, vol. 401, no. 6755, p. 788, 1999.
[14] E. Bizzi and V. C. Cheung, “The neural origin of muscle synergies,”Frontiers in computational neuroscience, vol. 7, p. 51, 2013.
[15] V. C. Cheung, A. d’Avella, M. C. Tresch, and E. Bizzi, “Centraland sensory contributions to the activation and organization of musclesynergies during natural motor behaviors,” Journal of Neuroscience,vol. 25, no. 27, pp. 6419–6434, 2005.
[16] F. Hug, N. A. Turpin, A. Guevel, and S. Dorel, “Is interindividualvariability of emg patterns in trained cyclists related to different musclesynergies?” Journal of applied physiology, vol. 108, no. 6, pp. 1727–1736, 2010.
[17] F. Connolly, P. Polygerinos, C. J. Walsh, and K. Bertoldi, “Mechanicalprogramming of soft actuators by varying fiber angle,” Soft Robotics,vol. 2, no. 1, pp. 26–32, 2015.
[18] S. Grazioso, G. Di Gironimo, and B. Siciliano, “From differentialgeometry of curves to helical kinematics of continuum robots usingexponential mapping,” in Int. Symposium on Advances in Robot Kine-matics. Springer, 2018, pp. 319–326.
[19] ——, “A geometrically exact model for soft continuum robots: The finiteelement deformation space formulation,” Soft robotics, 2018.
92