Embed Size (px)
Citation preview

Asynchronous Ad-hoc Leader Election in Complete
NetworksNolan Irving

Outline
• Presentation of problem
• Survey of current work
• System description
• Program description
• Data collected
• Conclusions

Problem Statement
• Ad-hoc network• No existing backbone to network
• Nodes are resource-poor• Battery life
• Processing power

Problem Statement (cont.)
• Leader election• At any given time, there must be at most one
leader
• Both links and nodes are unstable• Cannot safely assume reliable channels
• Network must adapt to frequent changes

Uses of Ad-hoc Networks
• Rapid network deployment• Combat situations
• Search & rescue

Why Elect?
• The leader is used to control requests for access to limited resources• Restoration of tokens
• Grant resource requests

Other Research
• Multihop networks
• Bidirectional links
• Movement-based networks

Flawed Assumptions
• Algorithms assumed knowledge of number of participating processors
• Nearly all research assumed global ordering
• Link representation inappropriate to wireless networking

Other Problems
• Maintenance costs never addressed
• Addition/removal of nodes ignored• Problem increased by initialization requirement

Problem Description
• Asynchronous network
• Unknown participants
• No global ordering
• Broadcast communication channel
• CD enabled
• Complete network

Assumptions
• Communications is a shared broadcast channel – multiple simultaneous transmissions corrupt signal
• Nodes can detect a collision – likewise, the sender can detect a successful transmission
• Network is single-hop – all processors can be reached with a single broadcast
• A successful broadcast will reach all participating nodes

Program Framework
• Emulate asynchronous communications using priority queue
• Channel class keeps track of simultaneous communications and status
• Node class handles communications requests

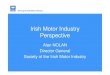
Simulation Structure
N o d e 1 N o d e 2 N o d e 3 N o d e 4
E le c tio n O b je ct
C h a n n e l C la ss
C o m m un ica tio ns Q u e ue

Program Framework (cont.)
• Leader election protocol
• Global ordering
• Adding/removing nodes

Results
• Times were an average of 1000 runs
• Total time is listed in seconds

Timing Results 1
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
5 10 15 20 25 50 100 150 250
0.05 sec

Timing Results 2
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
5 10 15 20 25 50 100 150 250
0.10 sec

Timing Results 3
0.00
0.50
1.00
1.50
2.00
2.50
3.00
5 10 15 20 25 50 100 150 250
0.02 sec

Comparison of Results
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
5 10 15 20 25 50 100 150 250
0.10 sec0.05 sec0.02 sec

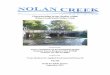
Timing Results(0.05 second message duration)
0.00
5.00
10.00
15.00
20.00
25.00
5 10 15 20 25 50 100 150 250
AverageWorst

Summary of Results
• Linear relationship between message length and election time
• Polynomial growth of algorithm time and message complexity with n

Conclusions
• Advantages• System offered a simple asynchronous protocol
for leader election
• Protocol allows for only one leader
• Maintenance costs minimal
• Handles new additions/dropped nodes easily
• One of very few designs able to handle an unknown number of nodes

Conclusions
• Disadvantages• Time not strongly bounded
• Delaying technique inefficient
• Will not count participating processors
• Unsuited to extremely large networks

Sources
• Fundamental Control Algorithms in Ad-hoc Networks. Hatzis, et. Al. 1998.
• Leader Election Algorithms for Mobile Ad-hoc Networks. Malpani, et. Al. 2000.
• Randomized Initialization Protocols for Ad-hoc Networks. Nakano, Koji and Olariu, Stephan. 2000.
• Randomized Leader Election Protocols for Ad-hoc Networks. Nakano, Koji and Olariu, Stephan. 2000.

Questions
???