Embed Size (px)
Citation preview

This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License.
To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/
Hugo GonzálezHugo González
@hugo_glez
http://atit.upslp.edu.mx/~hugo/
Linux en sistemas de tiempo realLinux en sistemas de tiempo real
Hugo Francisco González [email protected]
presenta:
Sistema Operativo de Tiempo Real
● Un sistema operativo de tiempo real (SOTR o RTOS
Real Time Operating System en inglés), ha sido desarrollado para aplicaciones de tiempo real. Se le exige corrección en sus respuestas bajo ciertas restricciones de tiempo. Para garantizar el comportamiento correcto en el tiempo requerido se necesita que el sistema sea predecible (determinista). 1
[1] Fuente: Wikipedia. http://es.wikipedia.org/wiki/Sistemas_operativos_de_tiempo_real
¿Qué es tiempo real ?
● Tiempo real en los sistemas operativos:
● La habilidad del sistema operativo para proveer un determinado nivel de servicio bajo un tiempo de respuesta definido.2
[2] POSIX Standard 1003.1
Catacterísticas
● Usado típicamente para aplicaciones integradas, normalmente tiene las siguientes características:– No utiliza mucha memoria– Cualquier evento en el soporte físico puede hacer
que se ejecute una tarea– Multiarquitectura (puertos de código para otro tipo
de CPU)– Muchos tienen tiempos de respuesta predecibles
para eventos electrónicos
Características deseables 3
● Multithreaded y preemptible● Thread priority has to exist because no
deadline driven OS exists● Must support predictable thread
synchronization mechanisms● A system of priority inheritance must exist
[3] Fuente: Bill Latura, Embedded Operating Systems and Linux
Puntos Cruciales 4
● Algoritmo de planificación
● El kernel del sistema
[4] Fuente: José Antonio Gómez Hernández, Sistemas Operativos de TiempoReal y empotrados
Linux RTOS libres
● ADEOS (Adaptative Domain Environment Operating Systems) http://www.opersys.com/adeos/
● KURT (Kansas University Real Time) http://www.ittc.ku.edu/kurt/
● Linux/RK (Linux/Resource Kernel) http://www2.cs.cmu.edu/afs/cs/project/art6/www/
● Linux SRT http://www.srcf.ucam.org/~dmi1000/linuxsrt/

● Qlinux http://lass.cs.umass.edu/software/qlinux/
● REDICE Linux http://www.redsonic.com/products/redice.htm
● RTAI (Real Time Application Interface) http://www.aero.polimi.it/~rtai/index.html
● RTLinux http://www.rtlinux.org/● TimeSys Linux http://www.timesys.com/
Consultar anexo para más información
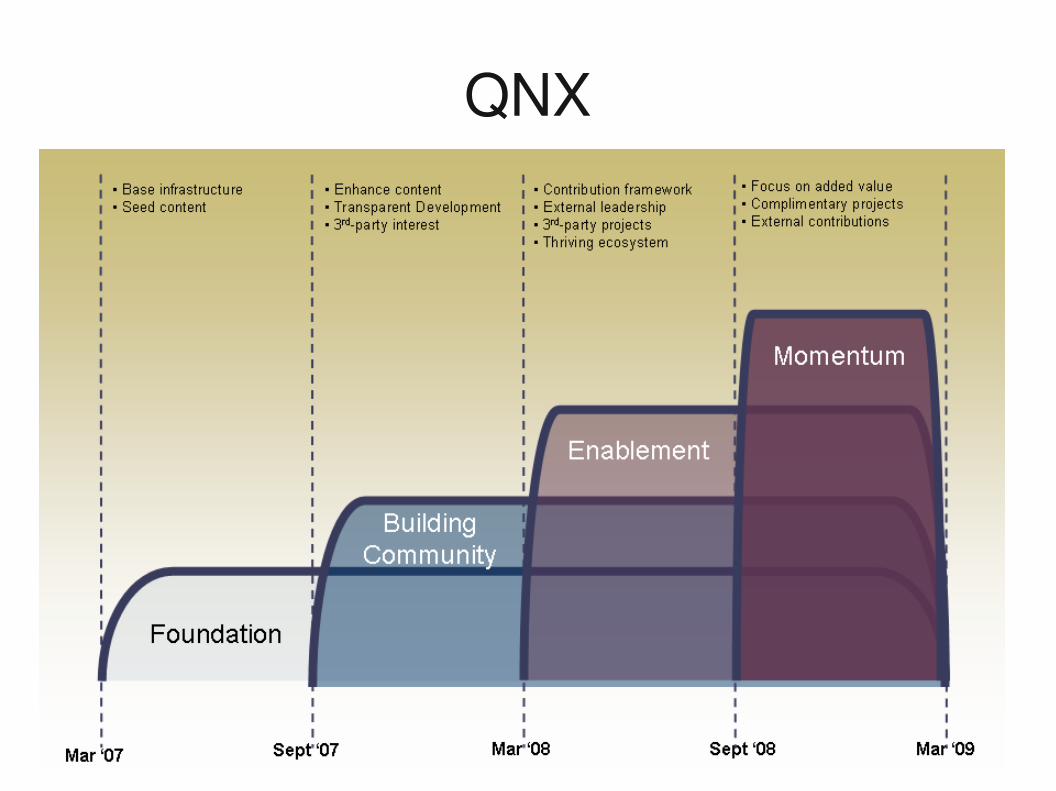
QNX
● El código fuente del microkernel se liberó bajo GPL hace algún tiempo.
Lo especial del Open Source
● Multiple choices vs. sole source● Source code freely available● Robust and reliable● Modular, configurable, scalable● Superb support for networking and Internet● No runtime licenses● Large pool of skilled developers
Fuente: Bill Latura, Embedded Operating Systems and Linux
Algunas estadísticas, tomadas de:
2007 Embedded Linux Market Survey
http://www.linuxdevices.com/cgibin/survey/survey.cgi?
view=archive&id=01302007173158
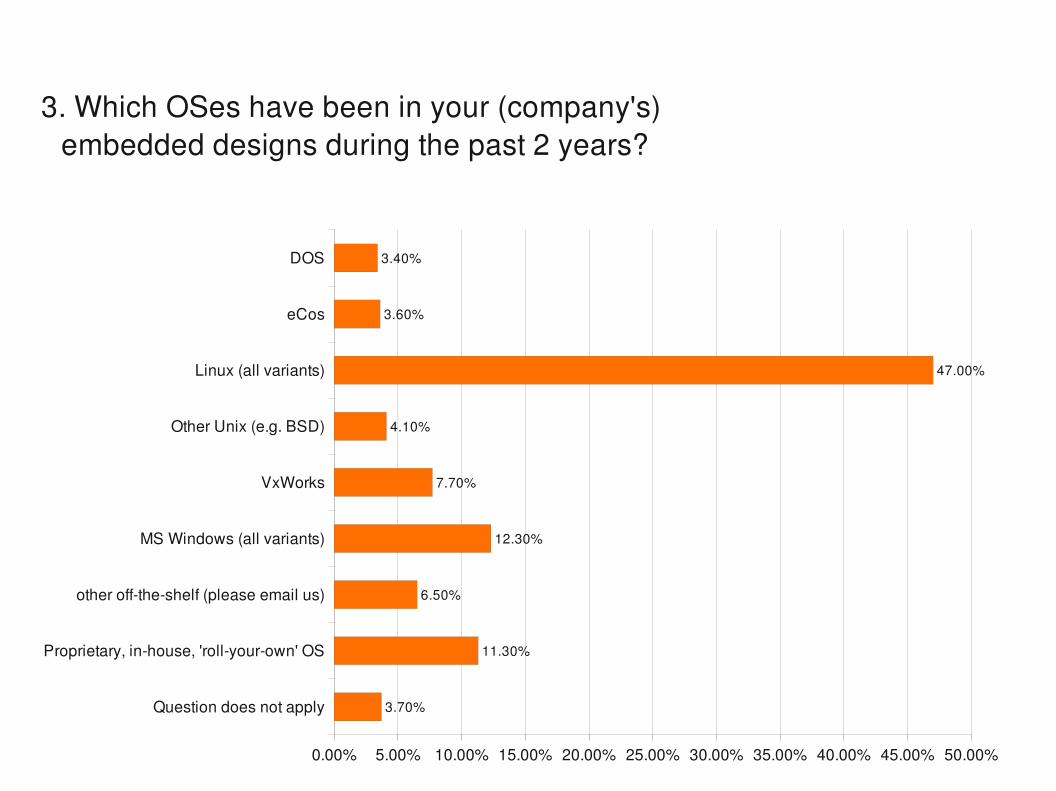
DOS
eCos
Linux (all variants)
Other Unix (e.g. BSD)
VxWorks
MS Windows (all variants)
other offtheshelf (please email us)
Proprietary, inhouse, 'rollyourown' OS
Question does not apply
0.00% 5.00% 10.00% 15.00% 20.00% 25.00% 30.00% 35.00% 40.00% 45.00% 50.00%
3.40%
3.60%
47.00%
4.10%
7.70%
12.30%
6.50%
11.30%
3.70%
3. Which OSes have been in your (company's) embedded designs during the past 2 years?
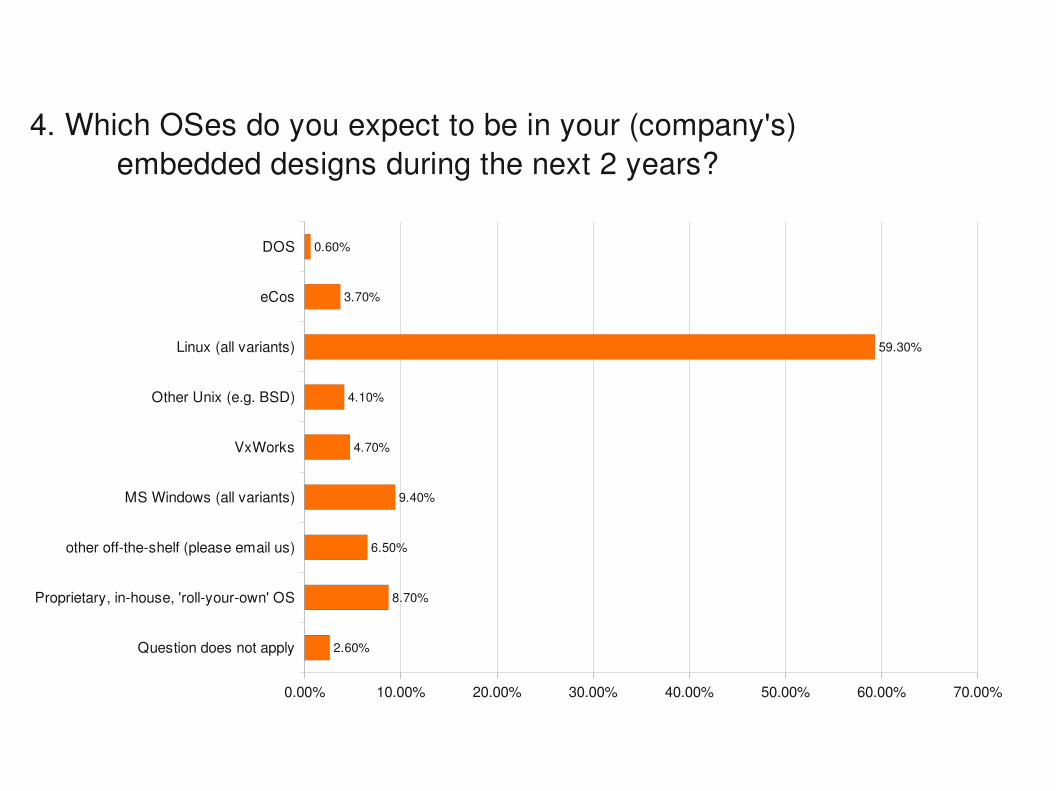
DOS
eCos
Linux (all variants)
Other Unix (e.g. BSD)
VxWorks
MS Windows (all variants)
other offtheshelf (please email us)
Proprietary, inhouse, 'rollyourown' OS
Question does not apply
0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00%
0.60%
3.70%
59.30%
4.10%
4.70%
9.40%
6.50%
8.70%
2.60%
4. Which OSes do you expect to be in your (company's) embedded designs during the next 2 years?
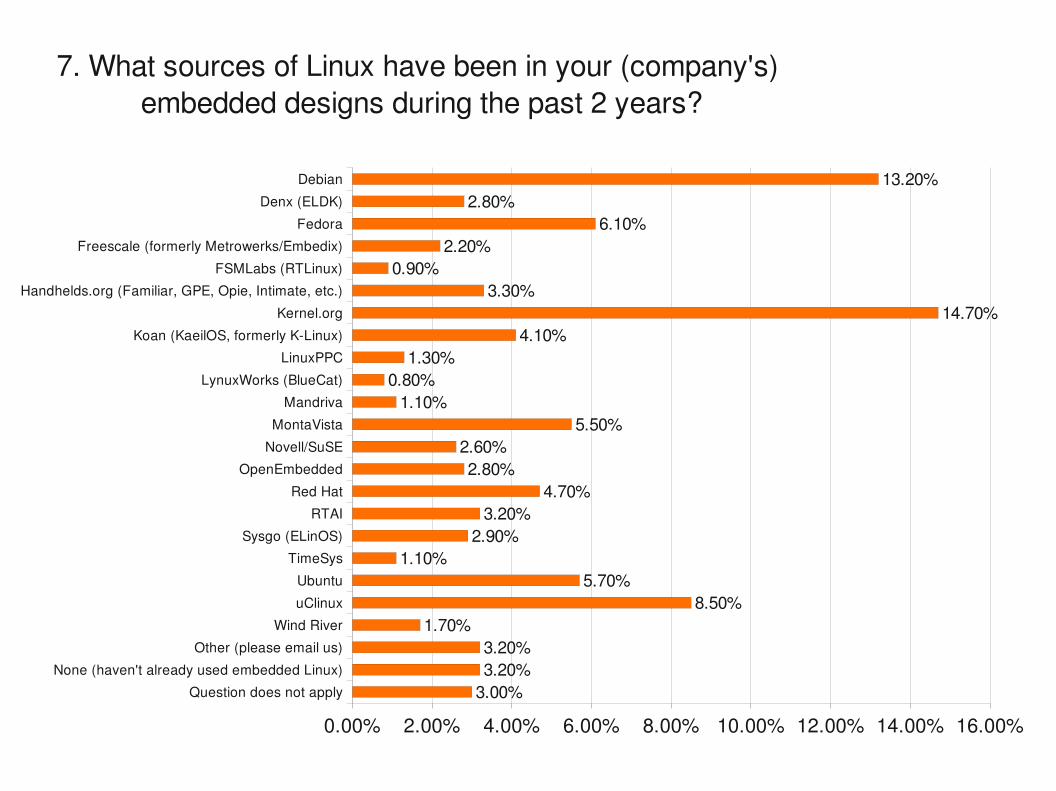
Debian
Denx (ELDK)
Fedora
Freescale (formerly Metrowerks/Embedix)
FSMLabs (RTLinux)
Handhelds.org (Familiar, GPE, Opie, Intimate, etc.)
Kernel.org
Koan (KaeilOS, formerly KLinux)
LinuxPPC
LynuxWorks (BlueCat)
Mandriva
MontaVista
Novell/SuSE
OpenEmbedded
Red Hat
RTAI
Sysgo (ELinOS)
TimeSys
Ubuntu
uClinux
Wind River
Other (please email us)
None (haven't already used embedded Linux)
Question does not apply
0.00% 2.00% 4.00% 6.00% 8.00% 10.00% 12.00% 14.00% 16.00%
13.20%2.80%
6.10%2.20%
0.90%3.30%
14.70%4.10%
1.30%0.80%
1.10%5.50%
2.60%2.80%
4.70%3.20%
2.90%1.10%
5.70%8.50%
1.70%3.20%3.20%
3.00%
7. What sources of Linux have been in your (company's) embedded designs during the past 2 years?
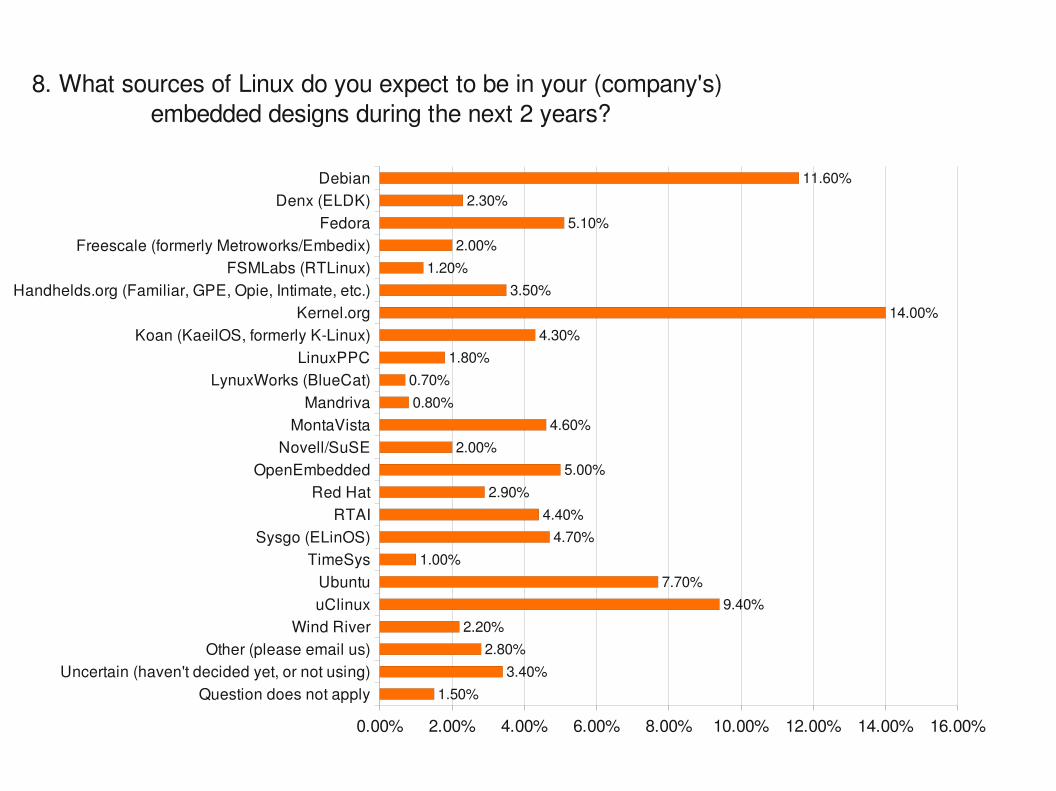
DebianDenx (ELDK)
FedoraFreescale (formerly Metroworks/Embedix)
FSMLabs (RTLinux)Handhelds.org (Familiar, GPE, Opie, Intimate, etc.)
Kernel.orgKoan (KaeilOS, formerly KLinux)
LinuxPPCLynuxWorks (BlueCat)
MandrivaMontaVista
Novell/SuSEOpenEmbedded
Red HatRTAI
Sysgo (ELinOS)TimeSys
UbuntuuClinux
Wind RiverOther (please email us)
Uncertain (haven't decided yet, or not using)Question does not apply
0.00% 2.00% 4.00% 6.00% 8.00% 10.00% 12.00% 14.00% 16.00%
11.60%2.30%
5.10%2.00%
1.20%3.50%
14.00%4.30%
1.80%0.70%0.80%
4.60%2.00%
5.00%2.90%
4.40%4.70%
1.00%7.70%
9.40%2.20%
2.80%3.40%
1.50%
8. What sources of Linux do you expect to be in your (company's) embedded designs during the next 2 years?

Cost
Documentation
Technical support
Ease of installation
Completeness of distribution
Development tools
Availability of device drivers
Minimized footprint
Realtime responsiveness
High availability
Availability of free, modifiable source code
Availability of a demo/evaluation version
Reputation of the company/team behind it
Other (please email us)
Question does not apply
0.00% 2.00% 4.00% 6.00% 8.00% 10.00% 12.00% 14.00%
12.60%
9.50%
8.40%
5.10%
6.90%
11.70%
8.70%
5.20%
6.30%
4.20%
12.60%
2.20%
4.80%
0.30%
0.60%
9. Which factor(s) will have the greatest influence on your choice of an embedded Linux source?

Purchased from commercial embedded Linux vendor
Free version from commercial embedded Linux vendor
Bundled with hardware, or as a download from chip, board, tools, or system supplier
Free download from community sources (e.g. kernel.org, handhelds.org)
Other (please email us)
Uncertain (haven't decided yet, or not using)
Question does not apply
0.00% 10.00% 20.00% 30.00% 40.00%
21.80%
14.90%
14.70%
36.50%
0.60%
5.60%
5.60%
11. How do you expect to obtain your (company's) embedded Linux software during the next 2 years?
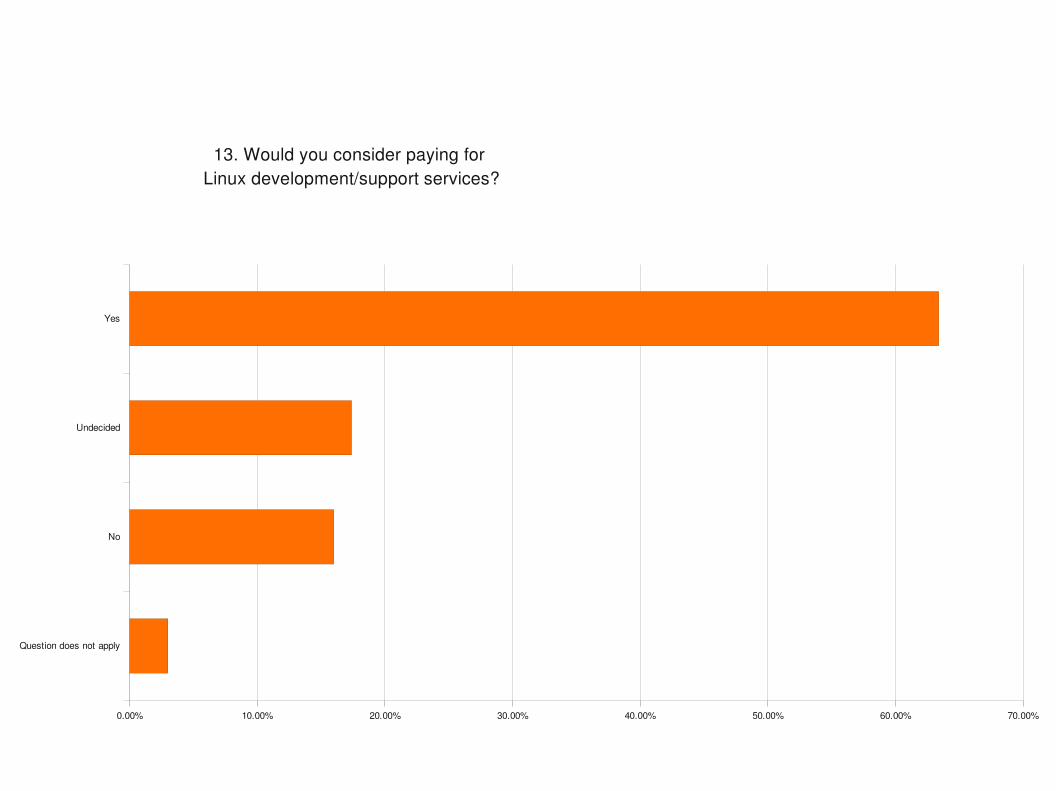
Yes
Undecided
No
Question does not apply
0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00%
13. Would you consider paying for Linux development/support services?

Existe mercado y desarrollo
Un evento completamente relacionado:● Ninth RealTime Linux Workshop held in Linz,
Austria, Nov. 23, 2007● El evento fue organizado por: the RealTime
Linux Foundation● http://www.linuxdevices.com/articles/AT499108
3271.html ● 28 paper con temas especializados

Papers: RealTime Linux Applications
● An Opensource Distributed Platform for the Control of the Puma 560 Manipulator Gianluca Palli and Claudio Melchiorri
● Highgain observers and Kalman filtering in hard realtime Nicolas Boizot, Eric Busvelle, Juergen Sachau
● Cell/B.E. Based Robot Controller Matthias Fritsch, Ronny Klauck, Marc Tritschler
● Autonomous Robot Running Linux for the Eurobot 2007 Competition Tran Duy Khanh, Zidek Martin, Benda Jan, Kubias Jiri, and Sojka Michal
● Providing Support for MultimediaOriented Applications under Linux Sebastian Schoning
● Industrial serial digital PID controller in Rtlinux Juan F. Florez, Jaime O. Diaz
● Simulink Target for Real Time Linux Extension: Hardware Control using a Wrapper for Comedi Klaus Oppermann, Daniel Schleicher and Bernhard G. Zagar
● Simulink Target for Real Time Linux Extension: Remote Control via Command Line and Web Interface Daniel Schleicher, Klaus Oppermann and Bernhard G. Zagar
● A Train Position Monitoring System Based on COTS and Free Software Components Donald Wayne Carr, Ruban Ruelas, Raol Aquino Santos, Apolinar Gonzalez Potes
● COTS and Free Software Components for Safety Critical Systems in Developing Countries Donald Wayne Carr, Ruban Ruelas , Raol Aquino Santos, Apolinar Gonzalez Potes
● Linux as a handheld OS in Lenovo Zhang Feng and Lin Songtao
● Linux for Safety Critical Systems in IEC 61508 Context Nicholas Mc Guire

Papers : RealTime Linux Networks● A ClientServer Based RealTime Control Tool for Complex
Distributed Systems Axenie Cristian, Stancu Alexandru, Zanoschi Aurelian, Pascalin Andrei, Perjeru Marius, Maftei Florentina
● UDP for realtime Linux Platschek Andreas
● Implementation of Model Based Networked Predictive Control System Ahmet Onat, Emrah Parlakay
● Exploiting the hard realtime features of PROFINET by a realtime capable Linux KarlHeinz Krause
● RealTime CORBA performance on LinuxRT_PREMMPT Manuel Traut
● The OSADL Fieldbus Framework Robert Schwebel

Papers: RealTime Linux Concepts● Status overview of realtime Thomas Gleixner
● LITMUSRT: A Status Report James H. Anderson, Bjoern Brandenburg, Aaron Block John Calandrino, Uma Devi, and Hennadiy Leontyev
● RT Patch for Celleb Patch Status and Performance Measurements Tsutomu OWA
● Realtime capabilities of lowend PowerPC and ARM boards for embedded systems Alexander Bauer
● Evaluation of Linux rtpreempt for embedded industrial devices for Automation and Power technologies A case study Morten Mossige, Pradyumna Sampath, Rachana Rao
● Assessment of the Realtime Preemption Patches (RTPreempt) and their impact on the general purpose performance of the system Arther Siro, Carsten Emde, Nicholas McGuire
● Is it possible to run a Kernelbased Virtual Machine (kvm) without affecting the realtime capabilities of the host system? Carsten Emde, Michael Kremer and Jorg Muller
Papers: RealTime Linux Kernel● PaRTiKle OS, a replacement of the core of RTLinux S. Peiro, M.
Masmano, I. Ripoll, and A. Crespo
● XMFIFO: Interdomain Communication for XtratuM Shuwei Bai, Yiqiao Pu, Kairui She, Qingguo Zhou, Nicholas MC Guire, Lian Li
● XtratuM for PowerPC Zhou Rui, Wang Baojun, Arthur Siro, Nicholas McGuire, Zhou Qingguo
● Serving non realtime tasks in a reservation environment Luca Abeni, Claudio Scordino, Giuseppe Lipari, and Luigi Palopoli
● Lightweight RTAI for IA32 Michael Heimpold and Robert Baumgartl
● The design and implementation of L4FIFO with lockfree Cheng Guanghui, Nicholas MC Guire, Li Lian, Zhou Qingguo
● Bounding disk I/O response time for realtime systems V. Brocal, M. Masmano, I. Ripoll, and A. Crespo
● Prototyping UserOriented Addressing Model in Linux Kernel Maoke Chen, Taoyu Li, Dong Zhou and Xing Li
Ejemplos de productos
● TiVo● Telefonos celulares● GPS's● Televisiones● Dispositivos de red● Y muchos otros ...
http://images.google.com/images?q=embedded+linux+gadgets

Conclusiones
● Esta fue una breve introducción a los Sistemas de tiempo real con Linux
● Existen cifras que nos invitan a trabajar sobre este campo.
● Existen actividades especializadas y mucha gente involucrada en ellas ( es un sub mundo del software libre)

Preguntas ?
● Espero que no tengan muchas, pues yo no se mucho del tema :)
● Apenas voy involucrandome con el, para más referencias o algunas guías, contato en:



![Migración del sistema operativo de tiempo real MaRTE OS al ...Existe un sistema operativo de tiempo real, MaRTE OS [2], el cual sirve actualmente de soporte para la programación](https://img.pdfslide.net/doc/110x75/612102fe48d7674a26015255/migracin-del-sistema-operativo-de-tiempo-real-marte-os-al-existe-un-sistema.jpg)

























