Embed Size (px)
Citation preview

Auf dem Weg zu intelligenten technischen Systemen
Jürgen Gausemeier, Harald Anacker, Anja Czaja, Helene Waßmann
Lehrstuhl für Produktentstehung, Heinz Nixdorf Institut, Universität Paderborn
Fürstenallee 11, 33102 Paderborn
Tel. 05251 / 60 6267, Fax. 05251 / 60 6268
E-Mail: {Juergen.Gausemeier | Harald.Anacker | Anja.Czaja |
Helene.Wassmann}@hni.upb.de
Roman Dumitrescu
Fraunhofer-Institut für Produktionstechnologie IPT,
Projektgruppe Entwurfstechnik Mechatronik,
Zukunftsmeile 1, 33102 Paderborn
Tel. 05251/5465 124, Fax. 05251/5465 102
E-Mail: [email protected]
Zusammenfassung
Erfolgsversprechende Produktinnovationen beruhen zunehmend auf dem engen Zu-sammenwirken von Mechanik, Elektrik/Elektronik und Softwaretechnik. Dafür steht der Begriff Mechatronik. Aus der sich abzeichnenden Entwicklung der Informations- und Kommunikationstechnik eröffnen sich für den modernen Maschinenbau und verwandte Branchen faszinierende Perspektiven für die Produkte von morgen: Intelligente Techni-sche Systeme. Durch die Vielfalt an Verfahren insbesondere nichttechnischer Diszipli-nen, wie der Kognitionswissenschaft oder der Neurobiologie besitzen diese Systeme Eigenschaften, die so bislang nur von biologischen Systemen bekannt waren. Intelligen-te technische Systeme sind in der Lage, sich ihrer Umgebung und den Wünschen ihrer Anwender im Betrieb anzupassen. Sie stiften Nutzen im Haushalt, in der Produktion, im Handel, auf der Straße; sie sparen Ressourcen, sind intuitiv zu bedienen und verlässlich. Wir präsentieren in diesem Beitrag Methoden und Ansätze zur Entwicklung derart komplexer Systeme: Eine Spezifikationstechnik, die insbesondere der hohen Interdis-ziplinarität in den frühen Entwurfsphasen Rechnung trägt; Die Wiederverwendung von Lösungswissen unter Nutzung neuartiger Technologien wie dem Semantic Web; Früh-zeitige Analysen auf Basis der Prinziplösung, um das späte Auftreten von Fehlern signi-fikant zu reduzieren; Visuelle Analysen virtueller Prototypen mit Technologien der Augment Reality und Virtual Reality. Abschließend erörtern wir die Begegnung zukünf-tiger Herausforderungen in der Produktentstehung durch das Systems Engineering.
Schlüsselworte
Produktentstehung, Mechatronik, intelligente technische Systeme, Spezifikationstech-nik, Lösungswissen, frühzeitige Analysen, visuelle Analysen, Systems Engineering
Seite 2 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
1 Systematik der Produktentstehung
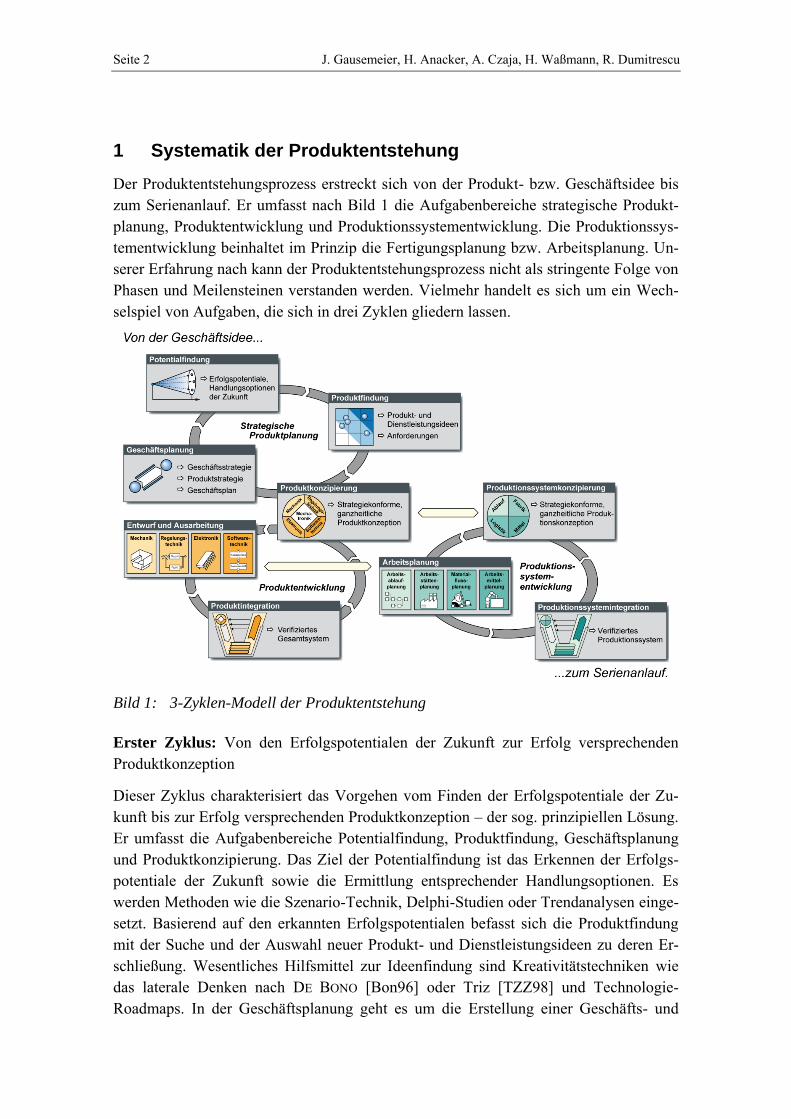
Der Produktentstehungsprozess erstreckt sich von der Produkt- bzw. Geschäftsidee bis zum Serienanlauf. Er umfasst nach Bild 1 die Aufgabenbereiche strategische Produkt-planung, Produktentwicklung und Produktionssystementwicklung. Die Produktionssys-tementwicklung beinhaltet im Prinzip die Fertigungsplanung bzw. Arbeitsplanung. Un-serer Erfahrung nach kann der Produktentstehungsprozess nicht als stringente Folge von Phasen und Meilensteinen verstanden werden. Vielmehr handelt es sich um ein Wech-selspiel von Aufgaben, die sich in drei Zyklen gliedern lassen.
Bild 1: 3-Zyklen-Modell der Produktentstehung
Erster Zyklus: Von den Erfolgspotentialen der Zukunft zur Erfolg versprechenden Produktkonzeption
Dieser Zyklus charakterisiert das Vorgehen vom Finden der Erfolgspotentiale der Zu-kunft bis zur Erfolg versprechenden Produktkonzeption – der sog. prinzipiellen Lösung. Er umfasst die Aufgabenbereiche Potentialfindung, Produktfindung, Geschäftsplanung und Produktkonzipierung. Das Ziel der Potentialfindung ist das Erkennen der Erfolgs-potentiale der Zukunft sowie die Ermittlung entsprechender Handlungsoptionen. Es werden Methoden wie die Szenario-Technik, Delphi-Studien oder Trendanalysen einge-setzt. Basierend auf den erkannten Erfolgspotentialen befasst sich die Produktfindung mit der Suche und der Auswahl neuer Produkt- und Dienstleistungsideen zu deren Er-schließung. Wesentliches Hilfsmittel zur Ideenfindung sind Kreativitätstechniken wie das laterale Denken nach DE BONO [Bon96] oder Triz [TZZ98] und Technologie-Roadmaps. In der Geschäftsplanung geht es um die Erstellung einer Geschäfts- und

Auf dem Weg zu intelligenten technischen Systemen Seite 3
Produktstrategie. Letztere enthält Aussagen zur Gestaltung des Produktprogramms, zur wirtschaftlichen Bewältigung der vom Markt geforderten Variantenvielfalt, zu einge-setzten Technologien, zur Programmpflege über den Produktlebenszyklus etc. Die Pro-duktstrategie mündet in einen Geschäftsplan, der den Nachweis erbringt, ob mit dem neuen Produkt bzw. mit einer neuen Produktoption ein attraktiver Return on Investment zu erzielen ist.
Zweiter Zyklus: Produktentwicklung/Virtuelles Produkt
Dieser Zyklus umfasst die fachgebietsübergreifende Produktkonzipierung, den fachge-bietspezifischen Entwurf und die entsprechende Ausarbeitung sowie die Integration der Ergebnisse der einzelnen Fachgebiete zu einer Gesamtlösung. Da in diesem Zusam-menhang die Bildung und Analyse von rechnerinternen Modellen eine wichtige Rolle spielt, hat sich der Begriff Virtuelles Produkt bzw. Virtual Prototyping verbreitet [SK97].
Dritter Zyklus: Produktionssystementwicklung/Digitale Fabrik
Den Ausgangspunkt bildet die Konzipierung des Produktionssystems. Dabei sind die vier Aspekte Arbeitsablaufplanung, Arbeitsmittelplanung, Arbeitsstättenplanung und Produktionslogistik (Schwerpunkt: Materialflussplanung) integrativ zu betrachten. Die-se vier Aspekte sind im Verlauf dieses dritten Zyklus weiter zu konkretisieren. Die Be-griffe Virtuelle Produktion bzw. Digitale Fabrik drücken aus, dass in diesem Zyklus ebenfalls rechnerinterne Modelle gebildet und analysiert werden – Modelle von den geplanten Produktionssystemen bzw. von Subsystemen des Gesamtsystems wie Ferti-gungslinien und Arbeitsplätze.
Produkt- und Produktionssystementwicklung sind parallel und eng aufeinander abge-stimmt voranzutreiben. Nur so wird sichergestellt, dass auch alle Möglichkeiten der Gestaltung eines leistungsfähigen und kostengünstigen Erzeugnisses ausgeschöpft wer-den. Gerade bei mechatronischen Erzeugnissen, die sich durch die räumliche Integration von Mechanik und Elektronik auszeichnen, sowie beim Einsatz neuer Hochleistungs-werkstoffe, wird bereits das Produktkonzept durch die in Betracht gezogenen Ferti-gungstechnologien determiniert. Ferner können auch neue Produktkonzepte die Ent-wicklung von Fertigungstechnologien und Produktionssystemen erfordern. Demzufolge sehen wir eine enge Verbindung und einen hohen Abstimmungsbedarf von Produkt- und Produktionssystementwicklung bereits in der Konzipierung, welcher im Verlauf der weiteren Konkretisierung in Entwurf und Ausarbeitung weiterbesteht. Die beiden waa-gerechten Pfeile in Bild sollen das verdeutlichen.
2 Intelligente technische Systeme
Erfolgsversprechende Produktinnovationen des modernen Maschinenbaus beruhen zu-nehmend auf dem engen Zusammenwirken von Mechanik, Elektrik/Elektronik und Softwaretechnik. Dafür steht der Begriff Mechatronik. Es ist ein Kunstwort aus Mecha-

Seite 4 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
nik und Elektronik, das die Erweiterung mechanischer Systeme um elektronische Funk-tionen widerspiegelt. Die Variantenvielfalt an mechatronischen Systemen ist groß. Bild 1 zeigt zwei Klassen, in die wir mechatronische Systeme untereilten [GF06].
Bild 1: Klassen mechatronischer Systeme
Ziel der ersten Klasse ist eine hohe Integration mechanischer und elektronischer Funkti-onsträger auf kleinem Bauraum. Wesentliche Erfolgspotentiale liegen in der Miniaturi-sierung, Funktionsintegration, der höheren Zuverlässigkeit und den geringeren Herstell-kosten. Zentrale Aufgabe ist die Aufbau- und Verbindungstechnik z.B. auf Basis inno-vativer Technologien wie MID (Molded Interconnect Devices). Aufgrund starker Wechselwirkungen zwischen Produkt und zugehörigem Produktionssystem sind diese parallel und integrativ zu entwickeln.
Bei mechatronischen Systemen der zweiten Klasse liegt der Fokus auf der Verbesserung der Verhaltensweise. Ziel ist es, Mehrkörpersysteme mit kontrolliertem Bewegungsver-halten zu entwickeln. Systeme dieser Klasse können durch Sensor-Aktor-Verknüpfungen sowie eine Informationsverarbeitung selbstständig auf Veränderungen in ihrer Umgebung reagieren. Die Hauptaufgabe liegt im Entwurf und in der Optimie-rung der Regelungstechnik.
Aus der sich abzeichnenden Entwicklung der Informations- und Kommunikationstech-nik eröffnen sich faszinierende Perspektiven für mechatronische Systeme, die weit über die bekannten Standards hinausgehen: Mechatronische Systeme mit inhärenter Teilin-telligenz. Die Informationstechnik aber auch nichttechnische Disziplinen, wie die Kog-nitionswissenschaft oder die Neurobiologie bringen eine Vielfalt an Methoden, Techni-ken und Verfahren zur Weiterentwicklung technischer Systeme hervor, die bislang nur von biologischen Systemen bekannt waren. Durch die Integration dieser Eigenschaften werden Systeme zukünftig in der Lage sein sich der Lage ihrer Umgebung und den
Triplanar
(Heinz Nixdorf Institut,
Trächtler)
Zentrale Aufgabe:
Aufbau- und Verbindungstechnik
(z.B. Molded Interconnect Devices – MID)
Zentrale Aufgabe:
Regelungstechnik (Mehrkörpersysteme
mit kontrolliertem Bewegungsverhalten)
Bondkopf (Heinz Nixdorf
Institut, Wallaschek/Sextro)
MID-Gehäuse
(Heinz Nixdorf Institut,
Gausemeier/Rückert)
pareos® – parallel elektro-
optisches Steckverbin-
dungssystem (HARTING
Electro-Optics)
LED-basierte Heckleuchte
(Hella)Fahrzeug Chamäleon
(Heinz Nixdorf Institut, Trächtler)
Räumliche Integration
von Mechanik und Elektronik
Kontrolliertes Bewegungsverhalten
von Mehrkörpersystemen (MKS)
Auf dem Weg zu intelligenten technischen Systemen Seite 5
Wünschen ihrer Anwender im Betrieb anzupassen. Sie stiften Nutzen im Haushalt, in der Produktion, im Handel, auf der Straße. Derartige Systeme lassen sich durch vier zentrale Eigenschaften charakterisieren [Dum10]:
• Adaptiv: Sie interagieren mit dem Umfeld und passen sich diesem autonom an. So können sie sich zur Laufzeit in einem vom Entwickler1 vorausgedachten Rahmen wei-terentwickeln. • Robust: Sie bewältigen unerwartete und vom Entwickler nicht berücksichtigte Situa-tionen in einem dynamischen Umfeld. Unsicherheiten oder fehlende Informationen können bis zu einem gewissen Grad ausgeglichen werden. • Vorausschauend: Auf der Basis von Erfahrungswissen antizipieren sie die künftigen Wirkungen von Einflüssen; Gefahren werden frühzeitig erkannt und die passenden Stra-tegien zu ihrer Bewältigung ausgewählt. • Benutzungsfreundlich: Sie passen sich dem Benutzerverhalten an und stehen in einer bewussten Interaktion mit dem Benutzer. Dabei bleibt ihr Verhalten für den Benutzer stets nachvollziehbar.
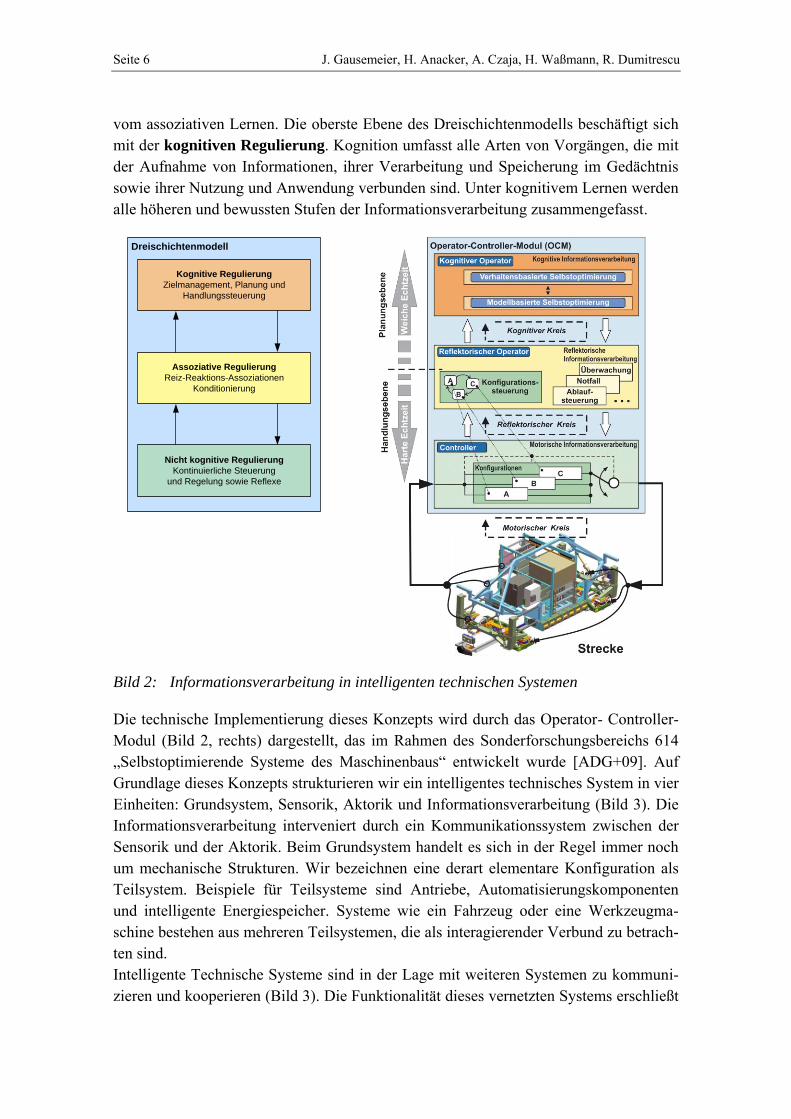
In erster Linie vollzieht die Art der Informationsverarbeitung den Wandel von mechat-ronischen zu Intelligenten Technischen Systemen. Mechatronische Systeme besitzen eine strarre Kopplung zwischen Sensorik und Aktorik. Intelligente technische Systeme verfügen ebenfalls über diese Kopplung. Die meisten existentiellen Systemmechanis-men müssen schon aus Gründen der Sicherheit reaktiv und reflexartig ablaufen. Die Besonderheit intelligenter technischer Systeme liegt in der Modifikation der Kopplung zwischen sensorischer Eingabe und aktorischer Ausgabe. Die Informationsverarbeitung ermöglicht eine flexible und intelligente Anpassung des systemeigenen Verhaltens ent-sprechend der subjektiv wahrgenommen externen sowie internen Zuständen. Das aus der Kognitionswissenschaft stammende Dreischichtenmodell für die Verhaltenssteue-rung veranschaulicht diese Zusammenhänge (Bild 2, links) [Str98].
Das Modell beruht auf der Überlegung, dass bei komplexen kognitiven Systemen, wie beispielsweise dem Menschen, die starre Kopplung der Sensorik und Aktorik mit der modifizierbaren Kopplung koexistiert. STRUBE definiert hierfür eine Schicht für die nicht-kognitive und eine Schicht für die kognitive Regulierung. Die Schnittstelle dieser rein reaktiven und der kognitiven Schicht bildet eine Zwischenebene, welche die assozi-ative Regulierung beschreibt.
Die unterste Ebene des Schichtenmodells beinhaltet die nicht kognitive Regulierung. Aufgrund der starren Kopplung zwischen der Sensorik und der Aktorik findet kein Lernprozess statt. Lediglich in der assoziativen und kognitiven Schicht ist das System lernfähig. Der Lernprozess in der mittleren Ebene, der assoziativen Regulierungs-
schicht, erfolgt durch klassische oder operante Konditionierung. Die Rede ist hierbei
1 Es sind stets Personen weiblichen und männlichen Geschlechts gleichermaßen gemeint; aus Gründen
der einfacheren Lesbarkeit wird im Folgenden nur die männliche Form verwendet.
Seite 6 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
vom assoziativen Lernen. Die oberste Ebene des Dreischichtenmodells beschäftigt sich mit der kognitiven Regulierung. Kognition umfasst alle Arten von Vorgängen, die mit der Aufnahme von Informationen, ihrer Verarbeitung und Speicherung im Gedächtnis sowie ihrer Nutzung und Anwendung verbunden sind. Unter kognitivem Lernen werden alle höheren und bewussten Stufen der Informationsverarbeitung zusammengefasst.
Bild 2: Informationsverarbeitung in intelligenten technischen Systemen
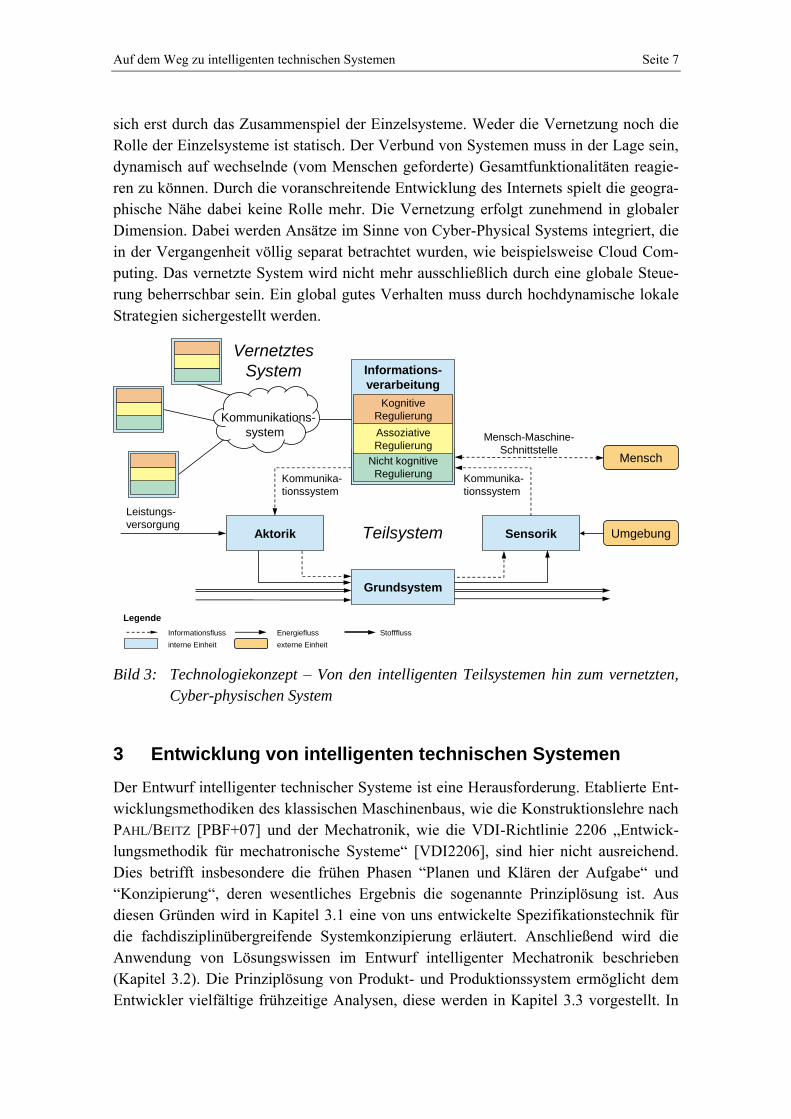
Die technische Implementierung dieses Konzepts wird durch das Operator- Controller-Modul (Bild 2, rechts) dargestellt, das im Rahmen des Sonderforschungsbereichs 614 „Selbstoptimierende Systeme des Maschinenbaus“ entwickelt wurde [ADG+09]. Auf Grundlage dieses Konzepts strukturieren wir ein intelligentes technisches System in vier Einheiten: Grundsystem, Sensorik, Aktorik und Informationsverarbeitung (Bild 3). Die Informationsverarbeitung interveniert durch ein Kommunikationssystem zwischen der Sensorik und der Aktorik. Beim Grundsystem handelt es sich in der Regel immer noch um mechanische Strukturen. Wir bezeichnen eine derart elementare Konfiguration als Teilsystem. Beispiele für Teilsysteme sind Antriebe, Automatisierungskomponenten und intelligente Energiespeicher. Systeme wie ein Fahrzeug oder eine Werkzeugma-schine bestehen aus mehreren Teilsystemen, die als interagierender Verbund zu betrach-ten sind. Intelligente Technische Systeme sind in der Lage mit weiteren Systemen zu kommuni-zieren und kooperieren (Bild 3). Die Funktionalität dieses vernetzten Systems erschließt
Dreischichtenmodell
Nicht kognitive Regulierung
Kontinuierliche Steuerung
und Regelung sowie Reflexe
Assoziative Regulierung
Reiz-Reaktions-Assoziationen
Konditionierung
Kognitive Regulierung
Zielmanagement, Planung und
Handlungssteuerung
Auf dem Weg zu intelligenten technischen Systemen Seite 7
sich erst durch das Zusammenspiel der Einzelsysteme. Weder die Vernetzung noch die Rolle der Einzelsysteme ist statisch. Der Verbund von Systemen muss in der Lage sein, dynamisch auf wechselnde (vom Menschen geforderte) Gesamtfunktionalitäten reagie-ren zu können. Durch die voranschreitende Entwicklung des Internets spielt die geogra-phische Nähe dabei keine Rolle mehr. Die Vernetzung erfolgt zunehmend in globaler Dimension. Dabei werden Ansätze im Sinne von Cyber-Physical Systems integriert, die in der Vergangenheit völlig separat betrachtet wurden, wie beispielsweise Cloud Com-puting. Das vernetzte System wird nicht mehr ausschließlich durch eine globale Steue-rung beherrschbar sein. Ein global gutes Verhalten muss durch hochdynamische lokale Strategien sichergestellt werden.
Bild 3: Technologiekonzept – Von den intelligenten Teilsystemen hin zum vernetzten,
Cyber-physischen System
3 Entwicklung von intelligenten technischen Systemen
Der Entwurf intelligenter technischer Systeme ist eine Herausforderung. Etablierte Ent-wicklungsmethodiken des klassischen Maschinenbaus, wie die Konstruktionslehre nach PAHL/BEITZ [PBF+07] und der Mechatronik, wie die VDI-Richtlinie 2206 „Entwick-lungsmethodik für mechatronische Systeme“ [VDI2206], sind hier nicht ausreichend. Dies betrifft insbesondere die frühen Phasen “Planen und Klären der Aufgabe“ und “Konzipierung“, deren wesentliches Ergebnis die sogenannte Prinziplösung ist. Aus diesen Gründen wird in Kapitel 3.1 eine von uns entwickelte Spezifikationstechnik für die fachdisziplinübergreifende Systemkonzipierung erläutert. Anschließend wird die Anwendung von Lösungswissen im Entwurf intelligenter Mechatronik beschrieben (Kapitel 3.2). Die Prinziplösung von Produkt- und Produktionssystem ermöglicht dem Entwickler vielfältige frühzeitige Analysen, diese werden in Kapitel 3.3 vorgestellt. In
SensorikAktorik
Grundsystem
Mensch
Leistungs-
versorgung
Mensch-Maschine-
Schnittstelle
Legende
Informationsfluss
interne Einheit
Kommunikations-
system
Kommunika-
tionssystem
Kommunika-
tionssystem
UmgebungTeilsystem
Vernetztes
System
StoffflussEnergiefluss
externe Einheit
Informations-
verarbeitung
Informations-
verarbeitung
Nicht kognitive
Regulierung
Assoziative
Regulierung
Kognitive
Regulierung
,
Seite 8 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
der Konkretisierung der Systeme sind virtuelle Prototypen ein fester Bestandteil. Kapi-tel 3.3 erläutert in diesem Zusammenhang das Potential visueller Analysen.
3.1 Fachdisziplinübergreifende Systemkonzipierung
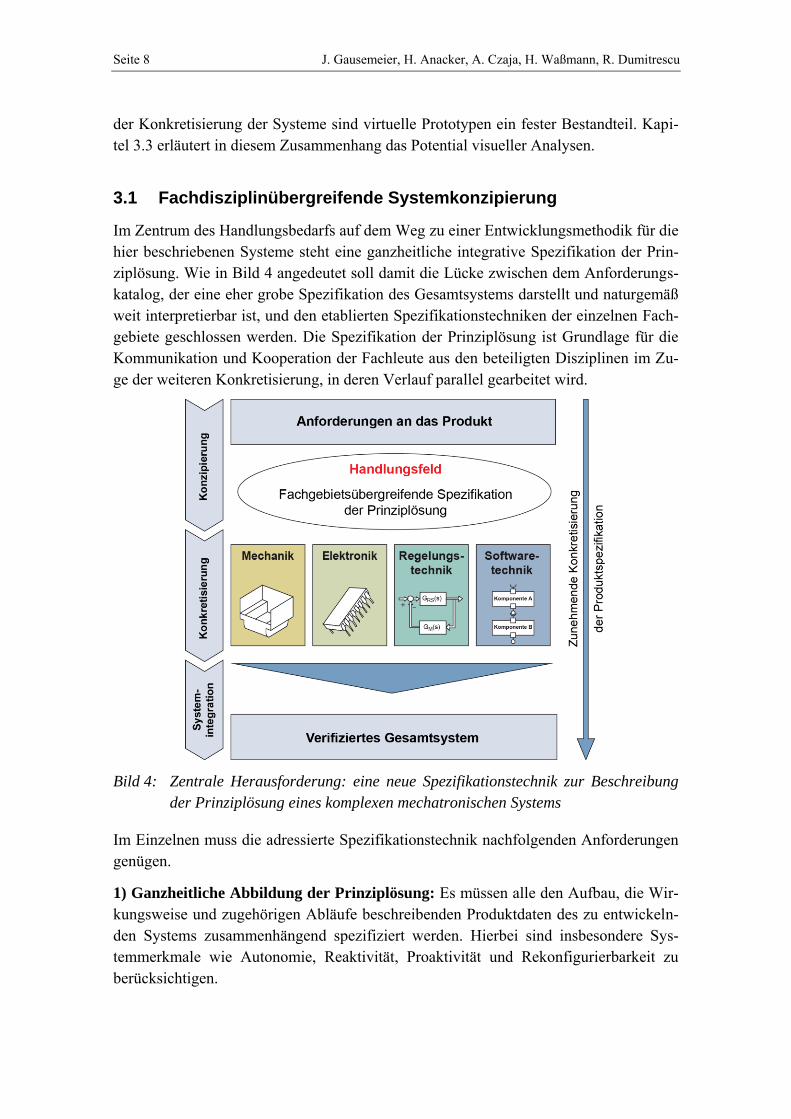
Im Zentrum des Handlungsbedarfs auf dem Weg zu einer Entwicklungsmethodik für die hier beschriebenen Systeme steht eine ganzheitliche integrative Spezifikation der Prin-ziplösung. Wie in Bild 4 angedeutet soll damit die Lücke zwischen dem Anforderungs-katalog, der eine eher grobe Spezifikation des Gesamtsystems darstellt und naturgemäß weit interpretierbar ist, und den etablierten Spezifikationstechniken der einzelnen Fach-gebiete geschlossen werden. Die Spezifikation der Prinziplösung ist Grundlage für die Kommunikation und Kooperation der Fachleute aus den beteiligten Disziplinen im Zu-ge der weiteren Konkretisierung, in deren Verlauf parallel gearbeitet wird.
Bild 4: Zentrale Herausforderung: eine neue Spezifikationstechnik zur Beschreibung
der Prinziplösung eines komplexen mechatronischen Systems
Im Einzelnen muss die adressierte Spezifikationstechnik nachfolgenden Anforderungen genügen.
1) Ganzheitliche Abbildung der Prinziplösung: Es müssen alle den Aufbau, die Wir-kungsweise und zugehörigen Abläufe beschreibenden Produktdaten des zu entwickeln-den Systems zusammenhängend spezifiziert werden. Hierbei sind insbesondere Sys-temmerkmale wie Autonomie, Reaktivität, Proaktivität und Rekonfigurierbarkeit zu berücksichtigen.
Auf dem Weg zu intelligenten technischen Systemen Seite 9
2) Intuitive grafische Modellierung: Die Spezifikationstechnik soll durch eine geeig-nete Semiotik, Syntax und Semantik das intuitive Arbeiten domänenübergreifender Teams fördern.
3) Unterstützung der Konzipierung: Die Spezifikationstechnik soll die Besonderhei-ten bei der Konzipierung der beschriebenen Systeme (Abstraktionsstufen, Dekompositi-on, Iterationen, Einsatz von Lösungsmustern etc.) unterstützen.
4) Gleichberechtigung der Domänen: Die involvierten Domänen sollen gleichrangig behandelt werden.
5) Beherrschung der Komplexität: Bewährte Strukturierungskonzepte, wie Hierarchi-sierung und Modularisierung, müssen von der Spezifikationstechnik unterstützt werden.
6) Durchgängigkeit: Mit der Spezifikationstechnik sollen alle Ergebnisse der Entwick-lungsphasen „Planen und Klären der Aufgabe“ und „Konzipierung“ durchgängig be-schrieben werden. Ferner ist der Übergang in die jeweilige domänenspezifische Konkre-tisierung (Entwurf, Ausarbeitung u.ä.) zu unterstützen.
7) Erweiterbarkeit: An der Entwicklung der beschriebenen Systeme können neben den Domänen Mechanik, Elektrotechnik/Elektronik und Softwaretechnik weitere Domänen (z.B. Mikroelektronik, Optik, Hydraulik, Pneumatik etc.) beteiligt sein. Die Spezifikati-onstechnik soll um die Merkmale dieser Domänen erweiterbar sein.
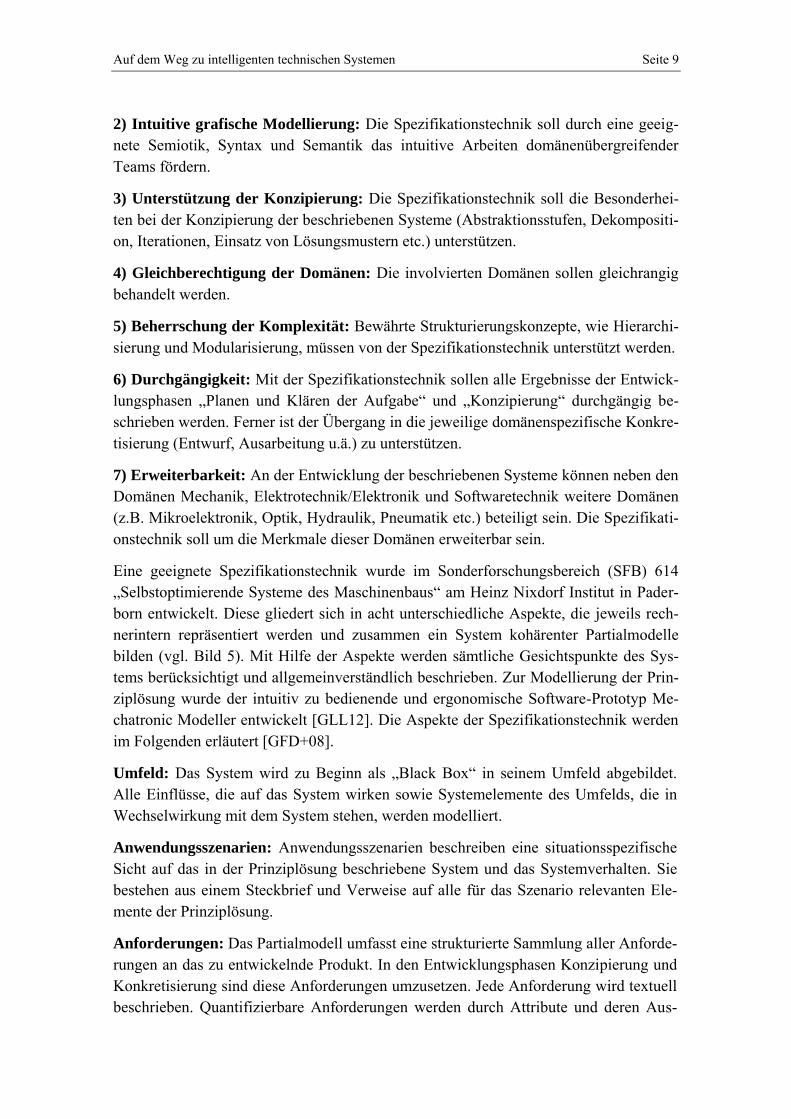
Eine geeignete Spezifikationstechnik wurde im Sonderforschungsbereich (SFB) 614 „Selbstoptimierende Systeme des Maschinenbaus“ am Heinz Nixdorf Institut in Pader-born entwickelt. Diese gliedert sich in acht unterschiedliche Aspekte, die jeweils rech-nerintern repräsentiert werden und zusammen ein System kohärenter Partialmodelle bilden (vgl. Bild 5). Mit Hilfe der Aspekte werden sämtliche Gesichtspunkte des Sys-tems berücksichtigt und allgemeinverständlich beschrieben. Zur Modellierung der Prin-ziplösung wurde der intuitiv zu bedienende und ergonomische Software-Prototyp Me-chatronic Modeller entwickelt [GLL12]. Die Aspekte der Spezifikationstechnik werden im Folgenden erläutert [GFD+08].
Umfeld: Das System wird zu Beginn als „Black Box“ in seinem Umfeld abgebildet. Alle Einflüsse, die auf das System wirken sowie Systemelemente des Umfelds, die in Wechselwirkung mit dem System stehen, werden modelliert.
Anwendungsszenarien: Anwendungsszenarien beschreiben eine situationsspezifische Sicht auf das in der Prinziplösung beschriebene System und das Systemverhalten. Sie bestehen aus einem Steckbrief und Verweise auf alle für das Szenario relevanten Ele-mente der Prinziplösung.
Anforderungen: Das Partialmodell umfasst eine strukturierte Sammlung aller Anforde-rungen an das zu entwickelnde Produkt. In den Entwicklungsphasen Konzipierung und Konkretisierung sind diese Anforderungen umzusetzen. Jede Anforderung wird textuell beschrieben. Quantifizierbare Anforderungen werden durch Attribute und deren Aus-
Seite 10 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
prägungen konkretisiert. Hilfestellung beim Aufstellen von Anforderungslisten geben Checklisten [PBF+07], [Rot01].
Funktionen: Dieser Aspekt beinhaltet eine hierarchische Aufgliederung der Funktiona-lität des Systems. Eine Funktion ist der allgemeine und gewollte Zusammenhang zwi-schen Eingangs- und Ausgangsgrößen mit dem Ziel, eine Aufgabe zu erfüllen. Funktio-nen werden durch Lösungsmuster bzw. deren Konkretisierungen realisiert. Eine Unter-gliederung in Subfunktionen erfolgt so lange, bis zu den Funktionen sinnvolle Lö-sungsmuster gefunden werden.
Bild 5: Aspekte der Spezifikationstechnik zur fachdisziplinübergreifenden Beschrei-
bung der Prinziplösung [GFD+08]
Wirkstruktur: In der Wirkstruktur werden die Systemelemente, deren Merkmale sowie die Beziehungen der Systemelemente zueinander beschrieben. Ziel ist die Abbildung des grundsätzlichen Aufbaus und der prinzipiellen Wirkungsweise des Systems. Syste-melemente repräsentieren Systeme, Module, Bauteile oder Software-Komponenten. Stoff-, Energie- und Informationsflüsse sowie logische Beziehungen beschreiben die Wechselwirkungen zwischen den Systemelementen.
Gestalt (Produkt): Bereits in der Konzipierung sind erste Festlegungen der Gestalt des Systems vorzunehmen. Sie sind ebenfalls Teil der Prinziplösung. Der Aspekt umfasst Angaben über Anzahl, Form, Lage, Anordnung und Art der Wirkflächen und Wirkorte
Auf dem Weg zu intelligenten technischen Systemen Seite 11
des Systems. Des Weiteren können Hüllflächen und Stützstrukturen beschrieben wer-den. Die rechnerunterstützte Modellierung erfolgt mit Hilfe gängiger 3D-CAD-Systeme.
Verhalten: Bei der Spezifikation von mechatronischen Systemen spielt die Modellie-rung von Aktivitäten, Zuständen und Zustandsübergängen sowie die Auswirkung auf die Wirkstruktur eine wesentliche Rolle. Diese Art der Modellierung erfolgt im Par-tialmodell Verhalten.
Zielsystem: Es handelt sich um die Repräsentation der externen, inhärenten und inter-nen Ziele und ihren Verknüpfungen. Die externen und inhärenten Ziele sind hierar-chisch als Baum dargestellt. Die Hierarchisierungsbeziehungen sind durch logische Beziehungen mit Angabe des Hierarchisierungskriteriums ist Teilziel von… spezifiziert. Aus den externen und inhärenten Zielen gehen die potentiellen internen Ziele hervor. Die Beeinflussung der Ziele untereinander wird mit Hilfe einer Einflussmatrix ausge-drückt. Sie gibt an, ob die Ziele sich gegenseitig unterstützen, negativ beeinflussen oder ob sie neutral zueinander sind.
3.2 Lösungswissen im Entwurf intelligenter Mechatronik
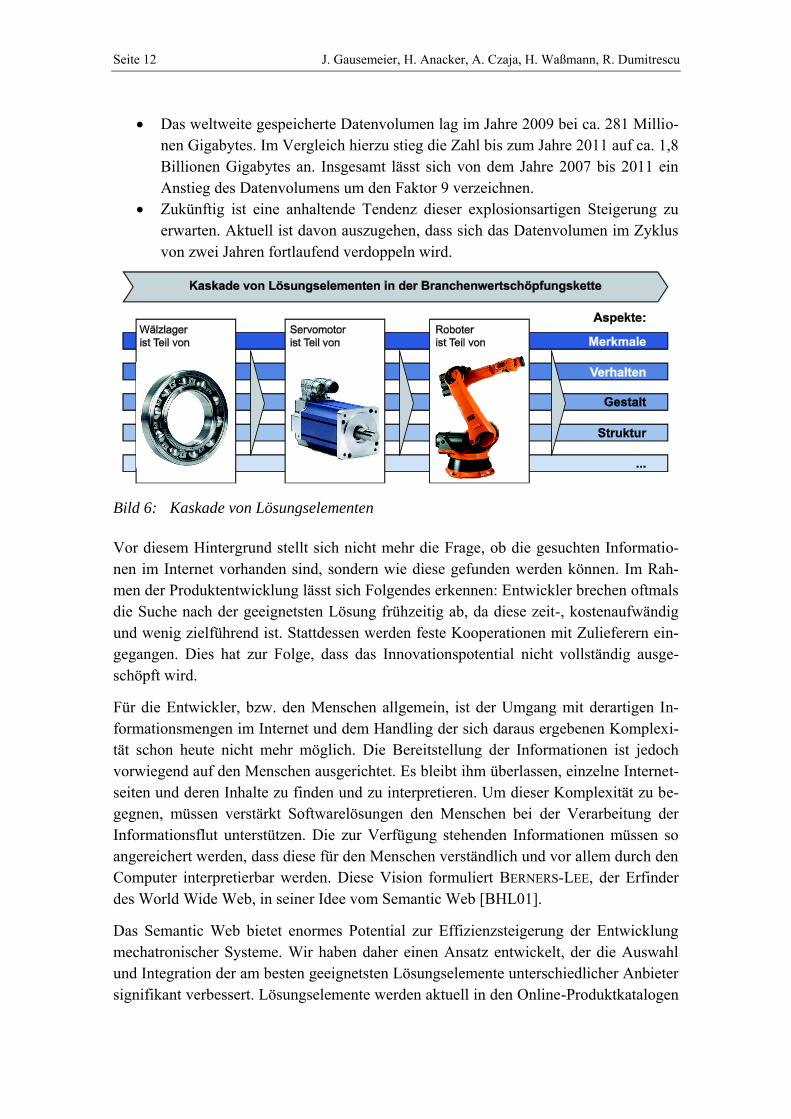
In der industriellen Wertschöpfung teilen sich Unternehmen vermehrt die Entwick-lungsarbeit mit spezialisierten Anbietern von Lösungselementen. Die Zuhilfenahme von externem Lösungswissen (Lösungselemente und Lösungsmuster) spielt eine immer zentralere Rolle im Entwurf intelligenter mechatronischer Systeme. Lösungselemente sind realisierte und bewährte Lösungen – Baugruppen, Module, Softwarebibliotheken etc. – zur Erfüllung einer Funktion des Gesamtsystems. Es wird zwischen materiellen und immateriellen Lösungselementen unterschieden, wobei materielle Lösungselemente oftmals Softwareanteile enthalten. Die rechnerinterne Repräsentation von Lösungsele-menten besteht aus mehreren Aspekten wie Verhalten und Gestalt. Im Prinzip besteht ein mechatronisches System aus einer Kaskade von Lösungselementen (Bild 6): Ein Wälzlager ist Teil eines Servomotors; ein Servomotor ist Teil eines Roboters; ein Robo-ter wiederum ist Teil einer Fertigungsstraße.
Mit dem Internet haben sich für den Vertrieb von Lösungselementen Online-Kataloge u.ä. verbreitet. Die Entwickler stehen regelmäßig vor der Herausforderung, das Internet nach der am besten geeignetsten Lösung zu durchsuchen. Oftmals formulieren sie die Suchanfragen in fachdisziplinspezifischen Terminologien und treffen auf unterschied-lichste Präsentationsformen der Anbieter – unternehmensspezifische Terminologie, De-tailtiefe, Aufbau von Online-Katalogen etc. Zusätzlich sind die Entwickler mit der sig-nifikant steigenden Anzahl von Lösungen konfrontiert. Generell steigen die Datenmen-gen im Internet explosionsartig an. Dies verdeutlichen folgende Zahlen einer Studie der IDC [GR11-ol]:
Seite 12 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Das weltweite gespeicherte Datenvolumen lag im Jahre 2009 bei ca. 281 Millio-nen Gigabytes. Im Vergleich hierzu stieg die Zahl bis zum Jahre 2011 auf ca. 1,8 Billionen Gigabytes an. Insgesamt lässt sich von dem Jahre 2007 bis 2011 ein Anstieg des Datenvolumens um den Faktor 9 verzeichnen.
Zukünftig ist eine anhaltende Tendenz dieser explosionsartigen Steigerung zu erwarten. Aktuell ist davon auszugehen, dass sich das Datenvolumen im Zyklus von zwei Jahren fortlaufend verdoppeln wird.
Bild 6: Kaskade von Lösungselementen
Vor diesem Hintergrund stellt sich nicht mehr die Frage, ob die gesuchten Informatio-nen im Internet vorhanden sind, sondern wie diese gefunden werden können. Im Rah-men der Produktentwicklung lässt sich Folgendes erkennen: Entwickler brechen oftmals die Suche nach der geeignetsten Lösung frühzeitig ab, da diese zeit-, kostenaufwändig und wenig zielführend ist. Stattdessen werden feste Kooperationen mit Zulieferern ein-gegangen. Dies hat zur Folge, dass das Innovationspotential nicht vollständig ausge-schöpft wird.
Für die Entwickler, bzw. den Menschen allgemein, ist der Umgang mit derartigen In-formationsmengen im Internet und dem Handling der sich daraus ergebenen Komplexi-tät schon heute nicht mehr möglich. Die Bereitstellung der Informationen ist jedoch vorwiegend auf den Menschen ausgerichtet. Es bleibt ihm überlassen, einzelne Internet-seiten und deren Inhalte zu finden und zu interpretieren. Um dieser Komplexität zu be-gegnen, müssen verstärkt Softwarelösungen den Menschen bei der Verarbeitung der Informationsflut unterstützen. Die zur Verfügung stehenden Informationen müssen so angereichert werden, dass diese für den Menschen verständlich und vor allem durch den Computer interpretierbar werden. Diese Vision formuliert BERNERS-LEE, der Erfinder des World Wide Web, in seiner Idee vom Semantic Web [BHL01].
Das Semantic Web bietet enormes Potential zur Effizienzsteigerung der Entwicklung mechatronischer Systeme. Wir haben daher einen Ansatz entwickelt, der die Auswahl und Integration der am besten geeignetsten Lösungselemente unterschiedlicher Anbieter signifikant verbessert. Lösungselemente werden aktuell in den Online-Produktkatalogen
Auf dem Weg zu intelligenten technischen Systemen Seite 13
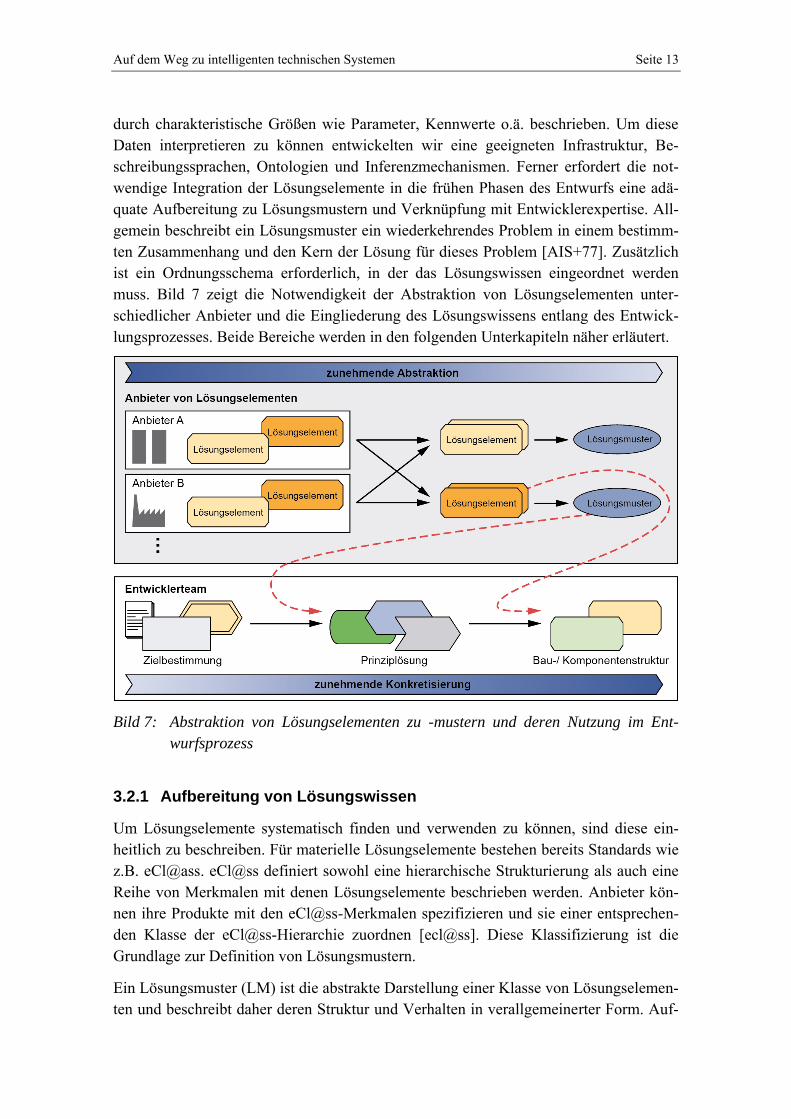
durch charakteristische Größen wie Parameter, Kennwerte o.ä. beschrieben. Um diese Daten interpretieren zu können entwickelten wir eine geeigneten Infrastruktur, Be-schreibungssprachen, Ontologien und Inferenzmechanismen. Ferner erfordert die not-wendige Integration der Lösungselemente in die frühen Phasen des Entwurfs eine adä-quate Aufbereitung zu Lösungsmustern und Verknüpfung mit Entwicklerexpertise. All-gemein beschreibt ein Lösungsmuster ein wiederkehrendes Problem in einem bestimm-ten Zusammenhang und den Kern der Lösung für dieses Problem [AIS+77]. Zusätzlich ist ein Ordnungsschema erforderlich, in der das Lösungswissen eingeordnet werden muss. Bild 7 zeigt die Notwendigkeit der Abstraktion von Lösungselementen unter-schiedlicher Anbieter und die Eingliederung des Lösungswissens entlang des Entwick-lungsprozesses. Beide Bereiche werden in den folgenden Unterkapiteln näher erläutert.
Bild 7: Abstraktion von Lösungselementen zu -mustern und deren Nutzung im Ent-
wurfsprozess
3.2.1 Aufbereitung von Lösungswissen
Um Lösungselemente systematisch finden und verwenden zu können, sind diese ein-heitlich zu beschreiben. Für materielle Lösungselemente bestehen bereits Standards wie z.B. eCl@ass. eCl@ss definiert sowohl eine hierarchische Strukturierung als auch eine Reihe von Merkmalen mit denen Lösungselemente beschrieben werden. Anbieter kön-nen ihre Produkte mit den eCl@ss-Merkmalen spezifizieren und sie einer entsprechen-den Klasse der eCl@ss-Hierarchie zuordnen [ecl@ss]. Diese Klassifizierung ist die Grundlage zur Definition von Lösungsmustern.
Ein Lösungsmuster (LM) ist die abstrakte Darstellung einer Klasse von Lösungselemen-ten und beschreibt daher deren Struktur und Verhalten in verallgemeinerter Form. Auf-
Seite 14 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
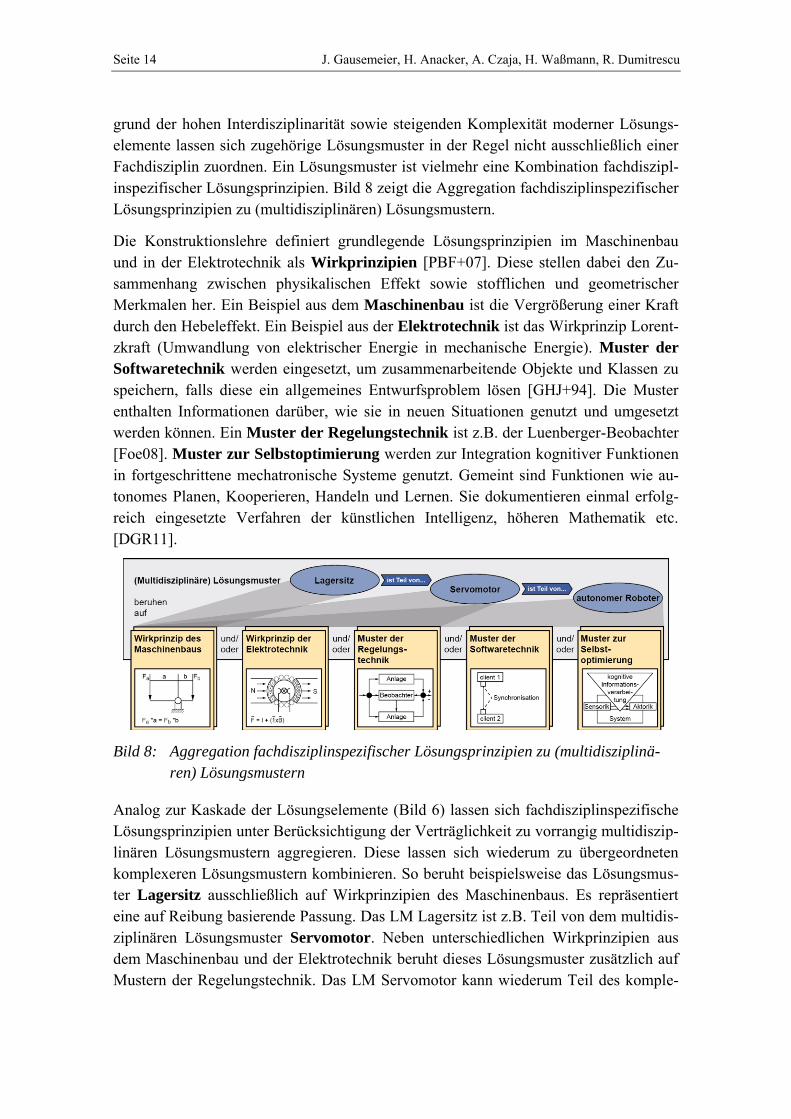
grund der hohen Interdisziplinarität sowie steigenden Komplexität moderner Lösungs-elemente lassen sich zugehörige Lösungsmuster in der Regel nicht ausschließlich einer Fachdisziplin zuordnen. Ein Lösungsmuster ist vielmehr eine Kombination fachdiszipl-inspezifischer Lösungsprinzipien. Bild 8 zeigt die Aggregation fachdisziplinspezifischer Lösungsprinzipien zu (multidisziplinären) Lösungsmustern.
Die Konstruktionslehre definiert grundlegende Lösungsprinzipien im Maschinenbau und in der Elektrotechnik als Wirkprinzipien [PBF+07]. Diese stellen dabei den Zu-sammenhang zwischen physikalischen Effekt sowie stofflichen und geometrischer Merkmalen her. Ein Beispiel aus dem Maschinenbau ist die Vergrößerung einer Kraft durch den Hebeleffekt. Ein Beispiel aus der Elektrotechnik ist das Wirkprinzip Lorent-zkraft (Umwandlung von elektrischer Energie in mechanische Energie). Muster der
Softwaretechnik werden eingesetzt, um zusammenarbeitende Objekte und Klassen zu speichern, falls diese ein allgemeines Entwurfsproblem lösen [GHJ+94]. Die Muster enthalten Informationen darüber, wie sie in neuen Situationen genutzt und umgesetzt werden können. Ein Muster der Regelungstechnik ist z.B. der Luenberger-Beobachter [Foe08]. Muster zur Selbstoptimierung werden zur Integration kognitiver Funktionen in fortgeschrittene mechatronische Systeme genutzt. Gemeint sind Funktionen wie au-tonomes Planen, Kooperieren, Handeln und Lernen. Sie dokumentieren einmal erfolg-reich eingesetzte Verfahren der künstlichen Intelligenz, höheren Mathematik etc. [DGR11].
Bild 8: Aggregation fachdisziplinspezifischer Lösungsprinzipien zu (multidisziplinä-
ren) Lösungsmustern
Analog zur Kaskade der Lösungselemente (Bild 6) lassen sich fachdisziplinspezifische Lösungsprinzipien unter Berücksichtigung der Verträglichkeit zu vorrangig multidiszip-linären Lösungsmustern aggregieren. Diese lassen sich wiederum zu übergeordneten komplexeren Lösungsmustern kombinieren. So beruht beispielsweise das Lösungsmus-ter Lagersitz ausschließlich auf Wirkprinzipien des Maschinenbaus. Es repräsentiert eine auf Reibung basierende Passung. Das LM Lagersitz ist z.B. Teil von dem multidis-ziplinären Lösungsmuster Servomotor. Neben unterschiedlichen Wirkprinzipien aus dem Maschinenbau und der Elektrotechnik beruht dieses Lösungsmuster zusätzlich auf Mustern der Regelungstechnik. Das LM Servomotor kann wiederum Teil des komple-
Auf dem Weg zu intelligenten technischen Systemen Seite 15
xen Lösungsmusters autonomer Roboter sein. Dieses Lösungsmusters beruht darüber hinaus auf weiteren Lösungsprinzipien aller beteiligten Fachdisziplinen.
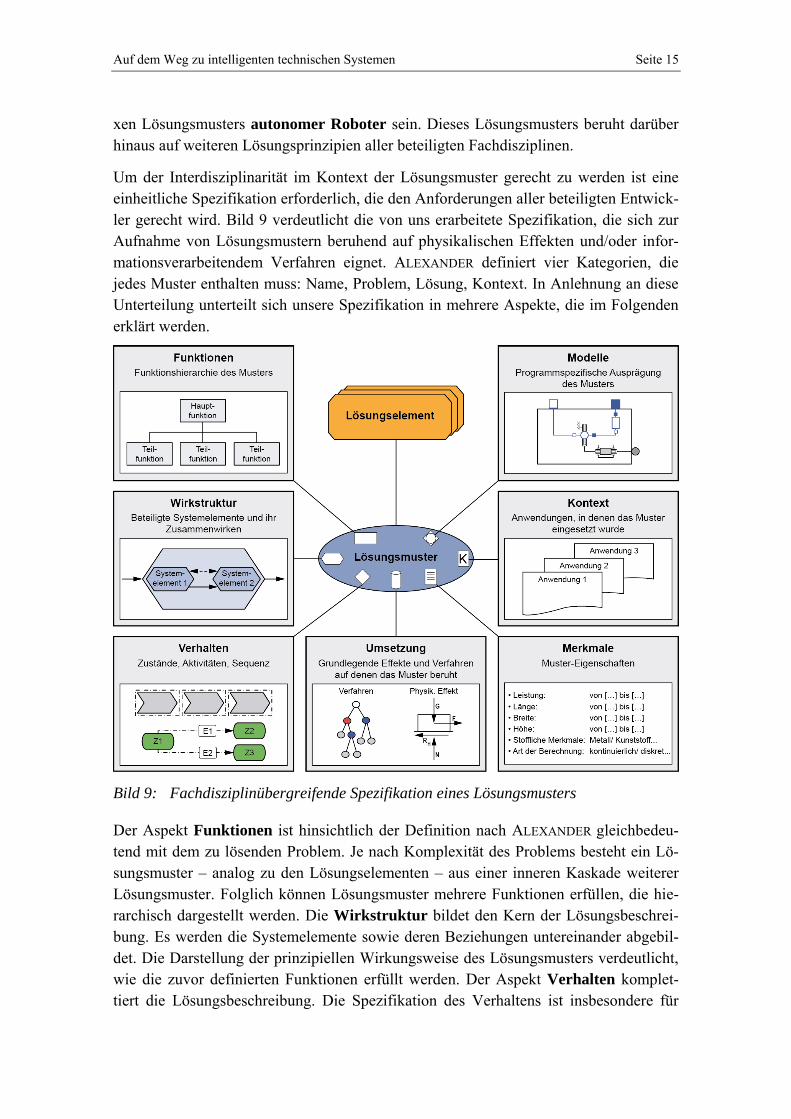
Um der Interdisziplinarität im Kontext der Lösungsmuster gerecht zu werden ist eine einheitliche Spezifikation erforderlich, die den Anforderungen aller beteiligten Entwick-ler gerecht wird. Bild 9 verdeutlicht die von uns erarbeitete Spezifikation, die sich zur Aufnahme von Lösungsmustern beruhend auf physikalischen Effekten und/oder infor-mationsverarbeitendem Verfahren eignet. ALEXANDER definiert vier Kategorien, die jedes Muster enthalten muss: Name, Problem, Lösung, Kontext. In Anlehnung an diese Unterteilung unterteilt sich unsere Spezifikation in mehrere Aspekte, die im Folgenden erklärt werden.
Bild 9: Fachdisziplinübergreifende Spezifikation eines Lösungsmusters
Der Aspekt Funktionen ist hinsichtlich der Definition nach ALEXANDER gleichbedeu-tend mit dem zu lösenden Problem. Je nach Komplexität des Problems besteht ein Lö-sungsmuster – analog zu den Lösungselementen – aus einer inneren Kaskade weiterer Lösungsmuster. Folglich können Lösungsmuster mehrere Funktionen erfüllen, die hie-rarchisch dargestellt werden. Die Wirkstruktur bildet den Kern der Lösungsbeschrei-bung. Es werden die Systemelemente sowie deren Beziehungen untereinander abgebil-det. Die Darstellung der prinzipiellen Wirkungsweise des Lösungsmusters verdeutlicht, wie die zuvor definierten Funktionen erfüllt werden. Der Aspekt Verhalten komplet-tiert die Lösungsbeschreibung. Die Spezifikation des Verhaltens ist insbesondere für
Seite 16 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Lösungsmuster mit Schwerpunkt Softwaretechnik relevant. Dieser Aspekt unterteilt sich in Verhalten – Aktivitäten, Verhalten – Zustände und Verhalten-Zustände. Im Aspekt Umsetzung wird festgehalten auf welchen Verfahren und/oder physikalischen Effekten die Problemlösung beruht. Der Aspekt Merkmale umfasst sämtliche Eigenschaften, die für das Lösungsmuster charakteristisch sind. In der Regel werden Parameterbereiche der zugehörigen Lösungselemente in Intervallen angegeben. Der Aspekt Kontext beinhaltet Anwendungen, in denen das Lösungsmuster bereits erfolgreich eingesetzt wurde. Jedes Lösungsmusters verfügt über mindestens ein Anwendungsbeispiel. Im Aspekt Modelle
werden programmspezifische Ausprägungen hinterlegt, die je nach Entwicklungsaufga-be variieren können. Die Modelle dienen z. B. der Verhaltenssimulation. Auch die An-bindung parametrisierbarer Gestaltmodelle ist denkbar.
3.2.2 Einsatz von Lösungswissen im Entwurfsprozess
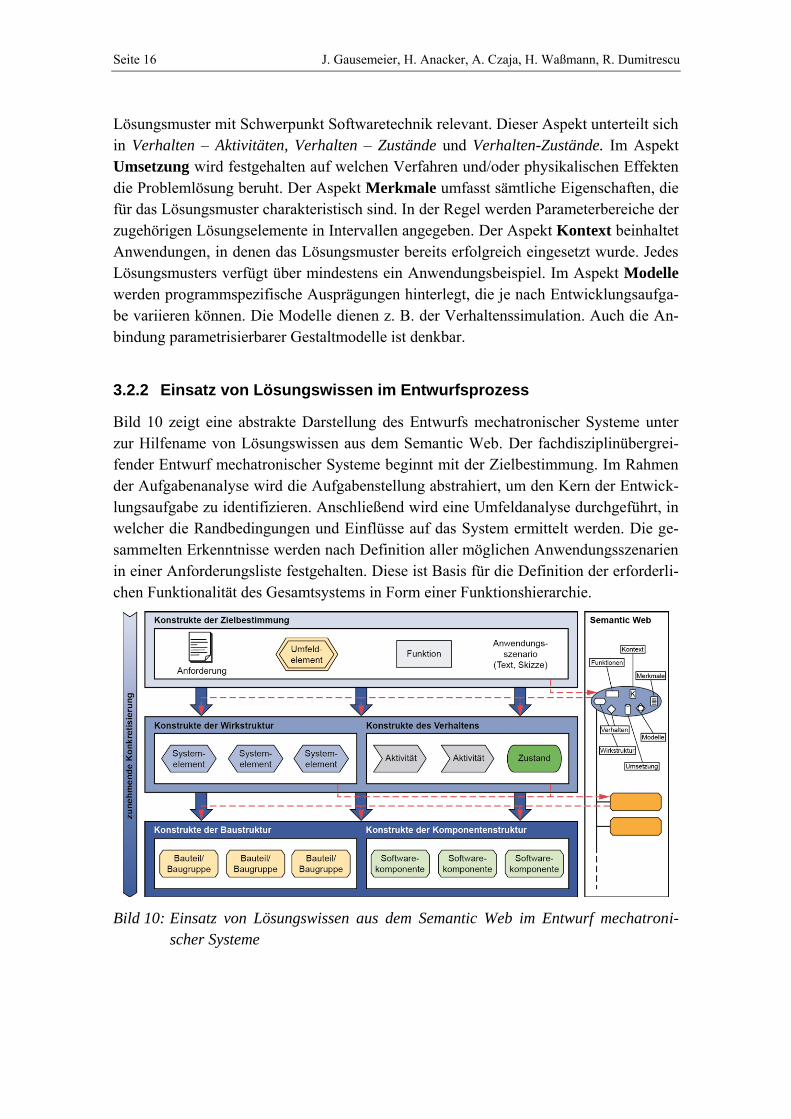
Bild 10 zeigt eine abstrakte Darstellung des Entwurfs mechatronischer Systeme unter zur Hilfename von Lösungswissen aus dem Semantic Web. Der fachdisziplinübergrei-fender Entwurf mechatronischer Systeme beginnt mit der Zielbestimmung. Im Rahmen der Aufgabenanalyse wird die Aufgabenstellung abstrahiert, um den Kern der Entwick-lungsaufgabe zu identifizieren. Anschließend wird eine Umfeldanalyse durchgeführt, in welcher die Randbedingungen und Einflüsse auf das System ermittelt werden. Die ge-sammelten Erkenntnisse werden nach Definition aller möglichen Anwendungsszenarien in einer Anforderungsliste festgehalten. Diese ist Basis für die Definition der erforderli-chen Funktionalität des Gesamtsystems in Form einer Funktionshierarchie.
Bild 10: Einsatz von Lösungswissen aus dem Semantic Web im Entwurf mechatroni-
scher Systeme
Auf dem Weg zu intelligenten technischen Systemen Seite 17
Auf Grundlage der Zielbestimmung erfolgt die Auswahl von Lösungsmustern. Diese gliedert sich in die unmittelbar aufeinander folgende Vorauswahl und Detailauswahl.
Vorauswahl: Um im Semantic Web nach Lösungsmustern suchen zu können, müssen die Funktionen formalisiert beschrieben werden. Diesbezüglich wurde ein umfangrei-cher Funktionsverbenkatalog zur Beschreibung mechatronischer Systeme erarbeitet. Etablierte Kataloge des klassischen Maschinenbaus [Kol98], [PBF+07], [Lan00], [VDI2860] wurden um Verben zur Beschreibung der Informationsverarbeitung erwei-tert. Es wurden allgemeine Funktionsverben sowie zugehörige Synonymfunktionen festgelegt. Speziell entwickelte Ontologien bilden die Verknüpfung zwischen den Funk-tionsverben untereinander sowie zu den Lösungsmustern im Semantic Web. Auf diese Weise lässt sich eine große Vorauswahl potentiell einsetzbarer Lösungsmuster umset-zen. Beispiel: Funktion „Axialkraft erzeugen“ ergibt das Suchergebnis „Linearmotor“, „Pneumatikzylinder“, „Deltaroboter“ etc..
Detailauswahl: Das Suchergebnis aus der Vorauswahl kann anschließend durch Berück-sichtigung der Anforderungen detailliert werden. Hierfür wurde eine Methode zur For-malisierung von Anforderungen erarbeitet. Wesentliche Bestandteile sind Taxonomien (z.B. für Wortklassen) sowie ein Parser. Ein Parser ist ein Bestandteil eines Interpreters oder Compilers, mit dessen Hilfe eine beliebige Eingabe in seine Bestandteile zerlegt und analysiert wird. Auf diese Weise werden z.B. textuelle Eingaben in Maschinenspra-che übersetzt und auswertbar gemacht. Die formalisierten Anforderungen werden an-schließend mit den Merkmalen der potentiell in Frage kommenden Lösungsmuster ab-geglichen. Beispiel: Die hinterlegten Merkmale der Lösungsmuster aus der Vorauswahl „Linearmotor“, „Pneumatikzylinder“, „Deltaroboter“ etc. werden z.B. mit der Anforde-rung „zu verwendende Energieart: Druckluft“ abgeglichen. Folglich fallen die Lö-sungsmuster „Linearmotor“ und „Deltaroboter“ aus dem Suchergebnis heraus.
Nach der Auswahl und Kombination der Lösungsmuster werden die Wirkstruktur, Ver-haltensmodelle und eine erste Grobgestalt erstellt. Die durch die Lösungsmuster bereit-gestellten Systemelemente und Verhaltensmodelle werden für den spezifischen Ent-wicklungsgegenstand individuell ausgeprägt. Es existieren in der Regel nicht für alle Funktionen geeignete Lösungsmuster im Semantic Web. In diesem Fall sind neuartige Lösungskonzepte von den Entwicklern zu erarbeiten. Es ist durchaus denkbar, dass be-reits in dieser frühen Phase der Entwicklung der Einsatz eines konkreten Lösungsele-ments feststeht. Um das Lösungselement frühzeitig in die Prinziplösung integrieren zu können, ist die Überführung der detailreichen und fachdisziplinspezifischen Beschrei-bung in die Partialmodelle Wirkstruktur und Verhalten erforderlich. Je nach Größe des Gesamtsystems wird dieses im Rahmen der Konzipierung modularisiert. Die einzelnen Module werden daraufhin verfeinert. Im Anschluss folgt die Zusammenführung der konzipierten Module zu einem Gesamtsystem. Das Ergebnis ist die Prinziplösung des mechatronischen Systems.
Seite 18 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Auf Basis der Prinziplösung folgt der fachdisziplinspezifische Entwurf und Ausarbei-tung. Die Partialmodelle werden hierzu in die Beschreibungssprachen oder Modelle der beteiligten Fachdisziplinen überführt und weiter verfeinert. So werden beispielsweise für ausgewählte Servomotoren die Parameterbereiche (Bauraum, max. Drehzahl etc.) festgelegt. Mit diesen zusätzlichen Informationen werden im Semantic Web geeignete Lösungselemente ausgewählt, die den verwendeten Lösungsmustern durch semanti-sche Annotationen zugeordnet sind. Lösungselemente, die bereits im Rahmen der Kon-zipierung feststanden, werden ebenfalls in die Gesamtlösung integriert. Prinzipiell be-steht ein modernes maschinenbauliches System am Ende der Konkretisierung aus einer Kombination bestehender Lösungselemente und innovativer Eigenentwicklungen reprä-sentiert durch Bauteil- und Komponentenstruktur. Eine Baustruktur repräsentiert den Bauzusammenhang durch die Repräsentation der gestaltbehafteten Bauteile, deren An-ordnung im Raum sowie deren logische Aggregation zu Baugruppen. Darüber hinaus kann die Baustruktur variiert werden, um weitere Aspekte, beispielsweise der Fertigung, der Montage, des Transports und der Wartung, abzubilden [PBF+07]. Eine Komponen-tenstruktur beschreibt das Zusammenwirken der Softwarekomponenten in einem Gefü-ge.
3.3 Frühzeitige Analysen
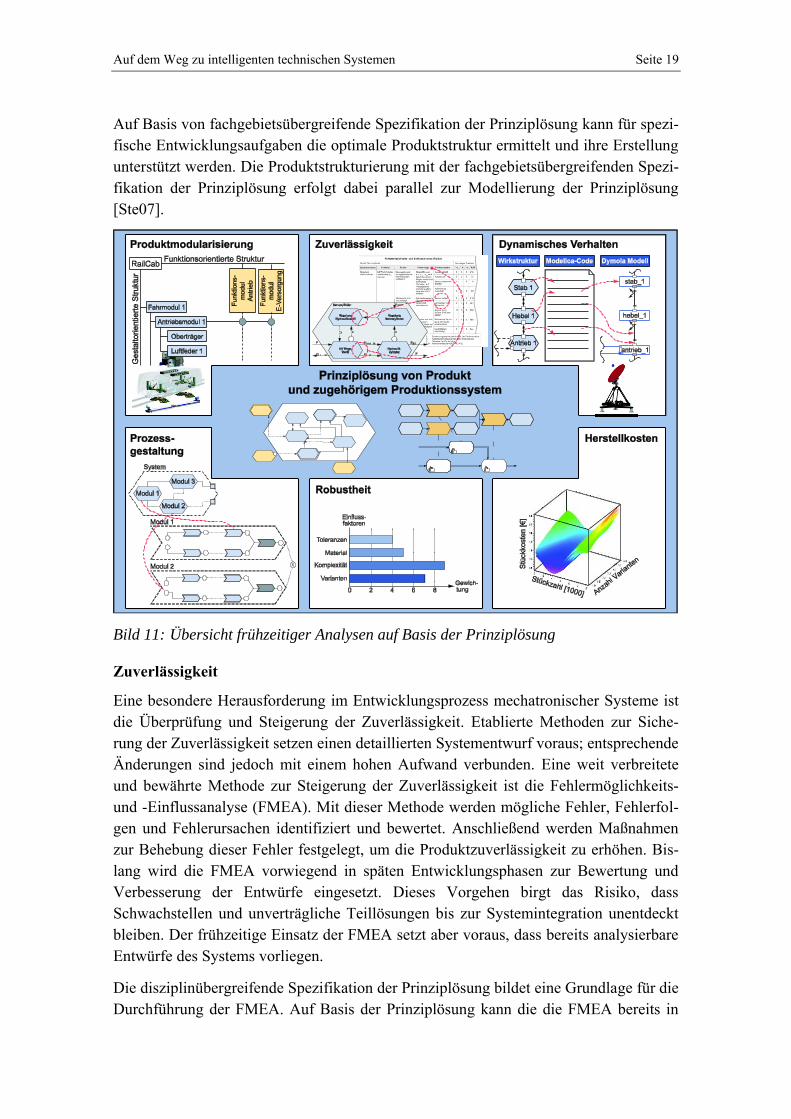
Je später im Entwicklungsprozess Schwachstellen oder Fehler von Produkt und Produk-tionssystem entdeckt werden, desto zeit- und kostenintensiver ist deren Behebung. Da-her ist es notwendig, das System zu einem möglichst frühen Zeitpunkt zu analysieren und zu optimieren. Frühzeitige Analysen auf Basis der Prinziplösung von Produkt und Produktionssystem ermöglichen dem Entwickler die frühzeitige Validierung der Prin-ziplösung eines mechatronischer Systems und vermeiden das späte Auftreten von Feh-lern. Im Folgenden werden Ansätze zur frühzeitigen Analyse folgender Aspekte erläu-tert: Produktmodularisierung, Zuverlässigkeit, dynamisches Verhaltens, Herstellkosten, Robustheit und Prozessgestaltung (Bild 11).
Produktmodularisierung
Die Produktstruktur wird im Rahmen der frühen Entwicklungsphasen erarbeitet und beeinflusst die Eigenschaften und die weitere Entwicklung des Produkts stark. Bei der Produktstrukturierung werden unterschiedliche Beziehungsaspekte – räumliche Abhän-gigkeiten, Stoff-, Energie- und Informationsflüsse sowie Eigenschaften der Systemele-mente – untersucht, um das System hierarchisch zu staffeln. Voraussetzung dafür ist ein übergreifendes Verständnis der Funktionsweise des Produkts und aller seiner Abhän-gigkeiten, die aus dem interdisziplinären Ansatz der Mechatronik resultieren [BF04]. Das angestrebte Resultat ist eine hierarchische Erzeugnisgliederung, die das Produkt in parallel weiterzuentwickelnde Einheiten unterteilt und damit die Komplexität handhab-bar macht.
Auf dem Weg zu intelligenten technischen Systemen Seite 19
Auf Basis von fachgebietsübergreifende Spezifikation der Prinziplösung kann für spezi-fische Entwicklungsaufgaben die optimale Produktstruktur ermittelt und ihre Erstellung unterstützt werden. Die Produktstrukturierung mit der fachgebietsübergreifenden Spezi-fikation der Prinziplösung erfolgt dabei parallel zur Modellierung der Prinziplösung [Ste07].
Bild 11: Übersicht frühzeitiger Analysen auf Basis der Prinziplösung
Zuverlässigkeit
Eine besondere Herausforderung im Entwicklungsprozess mechatronischer Systeme ist die Überprüfung und Steigerung der Zuverlässigkeit. Etablierte Methoden zur Siche-rung der Zuverlässigkeit setzen einen detaillierten Systementwurf voraus; entsprechende Änderungen sind jedoch mit einem hohen Aufwand verbunden. Eine weit verbreitete und bewährte Methode zur Steigerung der Zuverlässigkeit ist die Fehlermöglichkeits- und -Einflussanalyse (FMEA). Mit dieser Methode werden mögliche Fehler, Fehlerfol-gen und Fehlerursachen identifiziert und bewertet. Anschließend werden Maßnahmen zur Behebung dieser Fehler festgelegt, um die Produktzuverlässigkeit zu erhöhen. Bis-lang wird die FMEA vorwiegend in späten Entwicklungsphasen zur Bewertung und Verbesserung der Entwürfe eingesetzt. Dieses Vorgehen birgt das Risiko, dass Schwachstellen und unverträgliche Teillösungen bis zur Systemintegration unentdeckt bleiben. Der frühzeitige Einsatz der FMEA setzt aber voraus, dass bereits analysierbare Entwürfe des Systems vorliegen.
Die disziplinübergreifende Spezifikation der Prinziplösung bildet eine Grundlage für die Durchführung der FMEA. Auf Basis der Prinziplösung kann die die FMEA bereits in
Seite 20 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
der Konzipierung durchgeführt werden. Resultate sind die optimierte Prinziplösung so-wie eine Sammlung von Maßnahmen zum Abstellen potentieller Fehler im späteren Entwicklungsverlauf. Die in den frühen Phasen begonnene FMEA wird während des gesamten Entwicklungsprozesses konkretisiert und erweitert [Gau10].
Dynamisches Verhalten
Mechatronische Systeme, bei denen der Schwerpunkt auf dem kontrollierten Bewe-gungsverhalten liegt, sind geprägt durch eine komplexe Systemdynamik. Diese gilt es bereits ab den frühen Entwurfsphasen fortlaufend abzusichern. Vor diesem Hintergrund haben wir einen Ansatz zur frühzeitigen Analyse des dynamischen Systemverhaltens mit Hilfe von Modelica-Modellen entwickelt. Modelica ist eine Beschreibungssprache zur Spezifikation physikalischer Modelle. Mit Hilfe von Modelica lassen sich komplexe technische Systeme objektorientiert und gleichungsbasiert beschreiben [Mod09]. Ein weiterer Vorteil ist die textbasierte Beschreibung des Modelica-Modells, die eine auto-matisierte Erstellung initialer Modelle ermöglicht. Zur Analyse und zur weiteren Ausle-gung von Systemeigenschaften wird das Simulationsprogamm Dymola verwendet [Dyn10].
Die automatisierte Erstellung der Simulationsmodelle basiert auf den erstellten Partial-modellen Wirkstruktur und Verhalten-Zustände der Prinziplösung. Mit Hilfe eines Konverters werden die benötigten Informationen zum Aufbau des Modells aus den Me-chatronic Modeller- Dateien extrahiert. Während der Konvertierung werden aus den simulationsrelevanten Daten der Systemelemente idealisierte Modelica-Modelle erstellt. Diese werden zu einem Gesamtsimulationsmodell kombiniert, parametriert und mitei-nander verbunden. Ausgehend von dem Partialmodell Verhalten-Zustände wird die zu-standsbasierte Ansteuerung in Modelica erstellt. Mit Hilfe dieser automatisierten Erstel-lung von Modelica-Simulationsmodellen lässt sich das dynamische Systemverhalten bereits frühzeitig analysieren und absichern. Gewonnene Erkenntnisse aus der Analyse fließen in die Partialmodelle zurück.
Herstellkosten
Herstell-, Selbst- und Lebenslaufkosten bestimmen maßgeblich die Marktattraktivität eines Produkts. Die Kostenbeeinflussung ist in den frühen Phasen der Produktentwick-lung am größten. Folglich besteht der Bedarf einer frühen Analyse der entstehenden Kosten auf Basis der Prinziplösung von Produkt- und Produktionssystem.
Zur frühzeitigen Herstellkostenanalyse wird der Produktionsprozess auf Basis der Prin-ziplösung von Produkt- und Produktionssystem mit seinen Prozessschritten abstrakt beschrieben. Zur Beschreibung der Prozessschritte werden dabei Kennzahlen herange-zogen (z.B. Maschinenstundensatz, Rüstzeiten oder Qualitätsgrad), die auf Basis von Erfahrungswissen geschätzt oder aus empirischen Daten der Vergangenheit ermittelt werden müssen. Je nach Datengrundlage und Güte der Expertenschätzung ist die dadurch entstehende Unsicherheit der Parameter unterschiedlich. Hinzu kommt, dass die Prozessparameter aufgrund des stochastischen Verhaltens von Maschinen und Men-
Auf dem Weg zu intelligenten technischen Systemen Seite 21
schen ebenfalls stochastischer Natur sind, d.h. sie schwanken. Für eine adäquate Prog-nose der Herstellkosten müssen diese Unsicherheiten und stochastischen Schwankungen abgebildet und quantifiziert werden. Simulationsansätze sind sehr gut geeignet, um Aussagen über das gesamte System zu treffen, da sie eine einfache Integration stochas-tischer Größen ermöglichen. Die Bewertung erfolgt dabei für unterschiedliche Stück- und Variantenzahlen, deren Intervalle vom Benutzer angegeben werden können. Es werden Kombinationen aus Stück- und Variantenzahl gebildet, für die in mehreren Si-mulationsläufen die Herstellkosten bestimmt werden [GLL12].
Strukturrobustheit
In der Produktentstehung stellt der Umgang mit Änderungen und Störungen eine weite-re Herausforderung dar. Änderungen können geplant und somit frühzeitig bekannt sein, beispielsweise Facelifts, oder ungeplant auftreten, wie Gesetzesänderungen oder auch der Vorsprung von Konkurrenten durch neue Technologien. Nach FRICKE ET AL. [FGN+00] können fünf grundsätzliche Strategien zum Umgang mit Änderungen ange-wendet werden, um die Effektivität und Effizienz bei zukünftigen Änderungen zu ver-bessern. Änderungen können vermieden, in frühe Phasen verlagert oder effizient durch-geführt werden. Die Robustheit eines Produktkonzeptes ist ein Maß für seine Unemp-findlichkeit gegenüber gewollten und ungewollten Änderungen und deren Auswirkun-gen.
Zur Bewertung der Strukturrobustheit wird auf Basis der Prinziplösung wird zunächst eine Multiple- Domain- Matrix erzeugt, in dieser Matrix werden die Elemente der As-pekte Anforderungen, Funktionen, Bauteile, Prozesse und Ressourcen aufgelistet und einander gegenübergestellt. In die Zellen der Matrix werden anschließend die zwischen den Elementen bestehenden Abhängigkeiten eingetragen. Dabei bleibt die Diagonale der Matrix leer, da sich die Elemente nicht selbst beeinflussen. Die Beschreibung der Abhängigkeiten erfolgt binär (1= Es besteht eine Relation zwischen zwei Elementen; 0= Es liegt keine Relation zwischen diesen Elementen vor). Die Berechnung der Struk-turrobustheit eines Produktkonzepts erfolgt auf Basis der modellierten Abhängigkeiten. Für die Berechnung der Strukturrobustheit werden hierbei folgende Faktoren betrachtet [KHS+11]:
Der Einfluss eines Elements auf die Gesamtstruktur.
Die Auswirkungswahrscheinlichkeit einer Änderung an diesem Element.
Im Anschluss an die Berechnung erfolgt die Visualisierung und Analyse. Ein Kritische-Elemente-Portfolio (KE-Portfolio) ermöglicht die Klassifikation der Elemente nach ih-rem Einfluss und der Auswirkungswahrscheinlichkeit und unterstützt die Wahl einer geeigneten Strategie. Das KE-Portfolio wird durch die Dimensionen „normierter Ein-flusswert“ und „Auswirkungswahrscheinlichkeit“ aufgespannt. In das Portfolio werden die Modellelemente des betrachteten Produktkonzepts eingetragen und Handlungsemp-fehlungen abgeleitet [HHL10].
Seite 22 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Prozessgestaltung
Die Realisierung fortschrittlicher mechatronischer Systeme führt zu einer ohne Dyna-mik und Komplexität des Entwicklungsprozesses. Die Handhabung stellt die Prozess-verantwortlichen und die involvierten Entwickler vor große Herausforderungen. Die Interdisziplinarität der Produkte erfordert eine an die Produkteigenschaften angepasste Entwicklungsprozessgestaltung.
Die disziplinübergreifende Prinziplösung des Produkt und Produktionssystems bildet die Grundlage für die Gestaltung des folgenden Entwicklungsprozesses. Die Aspekte Wirkstruktur und Funktionen sind die Hauptinformationsträger. In der Wirkstruktur werden die Systemelemente und ihrer Beziehungen hinterlegt, diese können dann in Systemmodulen zusammengefasst werden. Dies strukturiert die Entwicklungsaufgaben. Außerdem werden für die Systemelemente die verantwortlichen Fachdisziplinen und die dazugehörigen Entwicklungsobjekte (z.B. CAD-Modelle) hinterlegt. Aus diesen Infor-mationen werden Zielentwicklungsobjekte abgeleitet. Ein Abgleich mit vorhandenen Entwicklungsobjekten ermöglicht das Aufstellen einer groben Prozessstruktur. Diese wird anschließen in einer Prozesssynthese verfeinert. Hierzu werden zum einen die Mo-dulverbindungen analysiert und entsprechende Vorgangsfolgen abgeleitet. Außerdem werden modulinterne Vorgangsfolgen bestimmt. Die Prinziplösung ermöglicht das Ab-leiten von Hilfsmittel, Ressourcen und benötigten Fähigkeiten in der Entwicklung. Die frühzeitige Analyse ermöglicht somit die Ableitung von Prozessplänen und das Zuord-nen entsprechender Ressourcen [Kah12].
3.4 Visuelle Analysen
Ausgehend von der Prinziplösung erfolgt die domänenspezifische Konkretisierung des mechatronischen Systems. Virtuelle Prototypen sind ein fester Bestandteil der Konkreti-sierung. Ein virtueller Prototyp ist die rechnerinterne Repräsentation eines echten Proto-typen und wird aus mehreren Modellen gebildet, die unterschiedliche Aspekte eines Systems beschreiben [GEK01]. Primär sind dies die Aspekte Gestalt, Produktstruktur und Verhalten. Kapitel 3.3 hat gezeigt, dass während der Konzipierung des Systems frühzeitige Analysen von Bedeutung sind. Ähnlich wird im Zuge der Konkretisierung der virtuelle Prototyp analysiert und bewertet, um Funktionen eines mechatronischen Systems abzusichern bevor ein realer Prototyp gebaut wird.
Intelligente mechatronische Systeme sind dadurch gekennzeichnet, dass in deren Infor-mationsverarbeitung komplexe Verfahren wie Optimierung oder Planung oder aber komplexe Regelungsstrategien eingesetzt werden. Eine Analyse solcher Verfahren ist bisher schwierig, denn:
Informationstechnische Prozesse sind nicht ohne weiteres sichtbar. Interne Zustän-de oder Systemgrößen, sowie deren Zusammenwirken sind nur schwer nachvoll-ziehbar.
Auf dem Weg zu intelligenten technischen Systemen Seite 23
Intelligente mechatronische Systeme sind lernfähig; Sie optimieren ihr Verhalten während des Betriebs. Die Lernprozesse können zu kritischen Situationen führen, in denen das System seine Funktion nicht mehr ausführen kann. Es muss durch einen Entwickler dennoch sichergestellt werden, dass geforderte Funktionen innerhalb akzeptabler Grenzen vollzogen werden.
Um diesem zu begegnen, bedarf es rechnerunterstützter Hilfsmittel, die einem Ingenieur eine eingängige Analyse und Bewertung virtueller Prototypen ermöglichen. Hierfür setzen wir die Technologie Virtual Reality (VR) sowie weitere, in diese integrierte Vi-sualisierungstechniken ein. Virtual Reality ist eine Mensch-Maschine-Schnittstelle, mit der virtuelle Prototypen erlebbar gemacht werden. Dies gilt insbesondere für die Gestalt und das Verhalten, wie der Kinematik eines technischen Produktes. Die zusätzlichen Visualisierungstechniken stellen zudem Simulationsdaten aus der Informationsverarbei-tung in Bezug zum Bewegungsverhalten des Systems anschaulich dar.
In den folgenden Unterkapiteln zeigen wir zwei Beispiele aus dem Kontext des Systems RailCab, die mit Hilfe von Visualisierungstechniken in VR analysiert werden: in 3.4.1 die Simulation der Konvoifahrt mehrerer Fahrzeuge und die Kommunikation zwischen den Fahrzeugen und in 3.4.2 die Simulation eines mechatronischen Moduls, des soge-nannten sturzvariablen Fahrwerks.
3.4.1 Simulation der Konvoifahrt
Die Konvoifahrt ist eine wesentliche Eigenschaft des RailCab-Systems. Dabei besteht ein Konvoi aus einem Konvoi-Führungsfahrzeug und mehreren Folgefahrzeugen. Das Führungsfahrzeug legt die Fahrtroute und weitere Parameter fest, wie z.B. die Ge-schwindigkeit, und sendet diese an alle Folgefahrzeuge. Zur Modellierung der Konvoi-bildung und Konvoifahrt wird ein Zustandsautomat eingesetzt, der die drei Zustände Konvoi-Bildung, Konvoi-Auflösung und Konvoi-Folgefahrt (Konvoi, mit kleinem Ab-stand) enthält. Die Regelung der Konvoifahrt wird in [HTS+08] näher erläutert. Der Prozess der Konvoibildung, der Konvoifahrt sowie der Konvoiauflösung ist hochdyna-misch und sicherheitskritisch, weil die Fahrzeuge mit sehr kleinem Abstand hinterei-nander fahren. Eine sichere Kommunikation ist dafür Grundvoraussetzung. Dies wird über Kommunikationsprotokolle gewährleistet. Sie sorgen dafür, dass der gesamte Konvoiprozess zuverlässig läuft, indem z.B. maximale Abbremsungs-/Verzögerungs-Grenzen eines Fahrzeugs im Konvoi an alle Teilnehmer kommuniziert werden. Diese Organisation aller Teilnehmer ist für den kollisionsfreien Konvoiprozess entscheidend [HWK+12].
Für die Gewährleistung einer fehlerfreien Simulation der Konvoifahrt, ist die Analyse der regelnden Informationsverarbeitung entscheidend. Hier wird die visuelle Analyse herangezogen, mit der entscheidungsrelevante Informationen, Systemgrößen oder inter-ne Zustände anschaulich dargestellt werden.

Seite 24 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Bild 12 zeigt mehrere Fahrzeuge während der Konvoifahrt. Zur Darstellung des Ab-stands zwischen den Fahrzeugen werden Linien eingeblendet. Die Einfärbung der Li-nien gibt Aufschluss darüber, ob die RailCabs einen kritischen Sicherheitsabstand ein-halten. Ein kritischer Abstand wird als rote, ein unkritischer Abstand als grüne Linie dargestellt. Die Kommunikation wird mit Hilfe einer gestrichelten, animierten Linie angezeigt. Eine Annotation an dieser Linie verdeutlicht, welche Art von Daten übertra-gen wird.
Bild 12: Darstellung der Inter-Fahrzeug Kommunikation sowie der Abstände zwischen
den Fahrzeugen
Bei konventionellen Analysen der Konvoifahrt müssen von einem Entwickler vielzähli-ge Daten, wie Position, Geschwindigkeit, sowie übertragene Daten überwacht werden. Dies erfolgt in der Regel mit Hilfe von mehreren 2-dimensionalen Diagrammen (z.B. Zeit-Weg-Diagramme, Signal-Diagrammen), die gleichzeitig überwacht werden müs-sen. Die Nachteile sind, dass mehrere Diagramme schnell übersichtlich werden oder das Zusammenwirken unterschiedlicher Systemgrößen nicht ohne weiteres erkennbar ist. Mit Hilfe der visuellen Analyse kann das Bewegungsverhalten der Fahrzeuge, der Pro-zess der Konvoibildung, der Abstand zwischen Fahrzeugen sowie der Kommunikati-onsaufbau und -daten in einer gemeinsamen Umgebung untersucht werden. Das Zu-sammenwirken unterschiedlicher Systemgrößen kann durch einen Entwickler schneller erkannt werden.
Bild 13 stellt ein RailCab und weitere Informationen auf einem Head-Up-Display dar. Es werden zum einen Systemgrößen, wie Soll- und Ist-Geschwindigkeit angezeigt, zum anderen werden interne Konvoi-Zustände mit Hilfe eines Zustandsdiagramms präsen-tiert. Der aktuell aktive Zustand wird in dem Zustandsdiagramm hervorgehoben. Im Bild befindet sich das RailCab zur Zeit im Zustand „kein Konvoi“. Durch die Darstel-

Auf dem Weg zu intelligenten technischen Systemen Seite 25
lung der sonst nicht ohne weiteres sichtbaren Zustände kann ein Entwickler jederzeit interne Regler-Zustände überwachen.
Bild 13: Darstellung der internen Konvoi-Zustände eines RailCabs sowie weitere
Informationen zur Geschwindigkeit
3.4.2 Simulation des sturzvariablen Fahrwerks
Das sogenannte sturzvariable Fahrwerk des Systems RailCab kann selbstständig über passive Weichen lenken und seine Räder entsprechend dem Streckenverlauf neigen (stürzen). Bei gewöhnlichen Fahrwerken für Bahnfahrzeuge wird die Spurführung über die Reibkräfte des Rad-Schiene-Kontakts gewährleistet. Reibung und die daraus resul-tierenden Kräfte lassen sich jedoch nur sehr unzuverlässig bestimmen. Bei Schnee, Laub oder vereisten Schienen können diese abnehmen. Für ein selbstlenkendes Fahr-werk bedeutet dies ein Sicherheitsrisiko, da die Spurführung bzw. die Lenkung nicht durch die Schienen und aktive Weichenverstellung zwangsgeführt wird. Durch das Stürzen der Räder des neuartigen Fahrwerks kann die Spurführung von der Reibung entkoppelt werden, wodurch die Fahrt über die Schienen sicherer wird.
Die Auslegung und Erprobung von Regelstrategien des Sturzvariablen Fahrwerks er-folgt an einem realen Prüfstand im Maßstab 1:2,5. Ziel bei der Reglerauslegung ist, die Position des Fahrwerks in der Spur zu regeln. Allerdings wird eine intelligente Rege-lung eingesetzt, die die Regelstrategie selbst festlegt. Regelstrategie bedeutet hier: Soll die Spurführung mit dem sturzvariablen Fahrwerk aktiv geregelt werden oder nicht? Aus Gründen der Energieeffizienz ist es nicht immer erforderlich, die Sturzverstellung zu aktivieren. Diese soll nur situationsbedingt eingestellt werden, um die Lenkung bei mangelnder Reibung zu unterstützen. Hierfür wurde eine hierarchische Regelstruktur
Seite 26 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
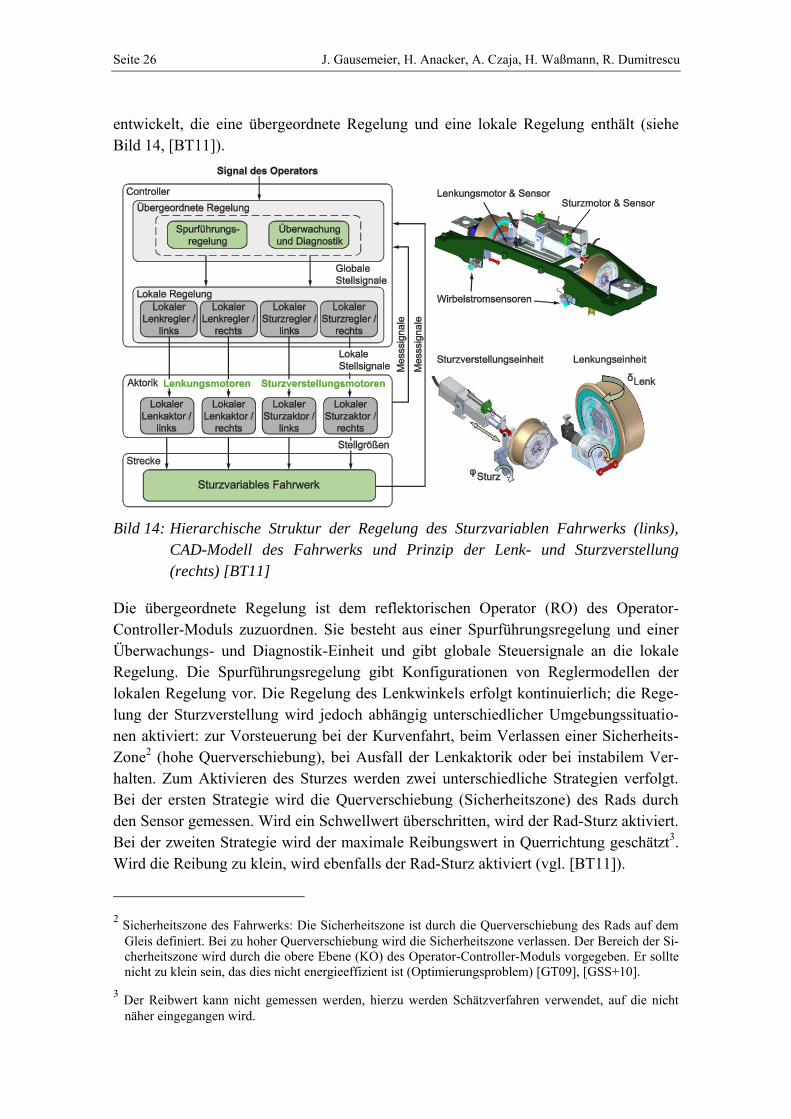
entwickelt, die eine übergeordnete Regelung und eine lokale Regelung enthält (siehe Bild 14, [BT11]).
Bild 14: Hierarchische Struktur der Regelung des Sturzvariablen Fahrwerks (links),
CAD-Modell des Fahrwerks und Prinzip der Lenk- und Sturzverstellung
(rechts) [BT11]
Die übergeordnete Regelung ist dem reflektorischen Operator (RO) des Operator-Controller-Moduls zuzuordnen. Sie besteht aus einer Spurführungsregelung und einer Überwachungs- und Diagnostik-Einheit und gibt globale Steuersignale an die lokale Regelung. Die Spurführungsregelung gibt Konfigurationen von Reglermodellen der lokalen Regelung vor. Die Regelung des Lenkwinkels erfolgt kontinuierlich; die Rege-lung der Sturzverstellung wird jedoch abhängig unterschiedlicher Umgebungssituatio-nen aktiviert: zur Vorsteuerung bei der Kurvenfahrt, beim Verlassen einer Sicherheits-Zone2 (hohe Querverschiebung), bei Ausfall der Lenkaktorik oder bei instabilem Ver-halten. Zum Aktivieren des Sturzes werden zwei unterschiedliche Strategien verfolgt. Bei der ersten Strategie wird die Querverschiebung (Sicherheitszone) des Rads durch den Sensor gemessen. Wird ein Schwellwert überschritten, wird der Rad-Sturz aktiviert. Bei der zweiten Strategie wird der maximale Reibungswert in Querrichtung geschätzt3. Wird die Reibung zu klein, wird ebenfalls der Rad-Sturz aktiviert (vgl. [BT11]).
2 Sicherheitszone des Fahrwerks: Die Sicherheitszone ist durch die Querverschiebung des Rads auf dem
Gleis definiert. Bei zu hoher Querverschiebung wird die Sicherheitszone verlassen. Der Bereich der Si-cherheitszone wird durch die obere Ebene (KO) des Operator-Controller-Moduls vorgegeben. Er sollte nicht zu klein sein, das dies nicht energieeffizient ist (Optimierungsproblem) [GT09], [GSS+10].
3 Der Reibwert kann nicht gemessen werden, hierzu werden Schätzverfahren verwendet, auf die nicht näher eingegangen wird.
Auf dem Weg zu intelligenten technischen Systemen Seite 27
Die Überwachungs- und Diagnoseeinheit beobachtet die Fahrwerks-Position und -Verhalten auf der Schiene. So fängt sie Fehlfunktionen oder Ausfall der Sensoren ab und veranlasst eine neue Berechnung zur Messgrößenaufbereitung (fehlertolerante Re-gelung). Fallen alle Sensoren oder Aktoren aus, wird ein Nothalt des Fahrzeugs er-zwungen.
Ziel der visuellen Analyse innerhalb einer VR-Anwendung ist es, die Analyse des Sys-temverhaltens bei der Reglerauslegung des Fahrwerks-Prüfstands zu verbessern. Da das System in Entwicklung ist, existiert keine reale Schienenstrecke, auf der der Prüfstand getestet werden kann. Die VR-Anwendung wird dazu eingesetzt, um eine Zuordnung des Verhaltens eines realen Fahrwerks zu einem virtuellen Streckenverlauf zu ermögli-chen, indem in dieser ein 3D-Modell einer Schienenstrecke und ein 3D-Modell des Fahrwerks dargestellt wird. Die Simulationsdaten des realen Prüfstand werden dabei online über eine Echtzeit-Bus Verbindung bezogen. Dadurch wird der Zusammenhang zwischen Anregung des Fahrwerks durch die Schienenstrecke und des darauf folgenden Systemverhaltens deutlich (nähere Informationen zu dem Systemaufbau der Anwen-dung befinden sich bspw. in [RW08]).
Im Folgenden werden Visualisierungstechniken vorgestellt, die abstrakte Daten des Reglers im Zusammenhang mit dem Fahrwerksverhalten erklären. Die Beispiele in Bild 15 bis Bild 17 stellen unterschiedliche Untersuchungsgegenstände des Fahrwerks dar. Haupt-Untersuchungsgegenstand sind die Stabilität des Fahrwerks und die Regelgüte der Spurführungsregelung. Sie sollen fortwährend in Abhängigkeit unterschiedlicher Parameter und des Regler-Zustands untersucht werden. Dazu werden in der VR-Anwendung Regler-Zustände, die aktuellen Lenk- und Sturzwinkel sowie die Querver-schiebung des Fahrwerks im Gleis präsentiert.
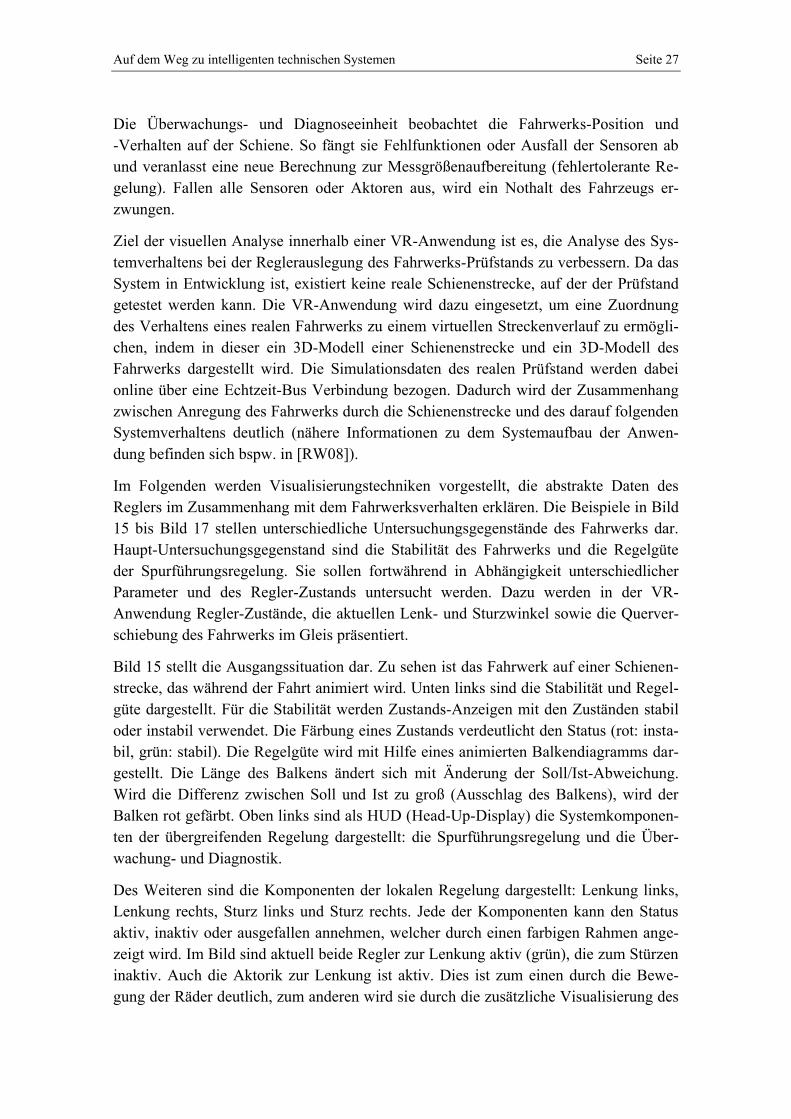
Bild 15 stellt die Ausgangssituation dar. Zu sehen ist das Fahrwerk auf einer Schienen-strecke, das während der Fahrt animiert wird. Unten links sind die Stabilität und Regel-güte dargestellt. Für die Stabilität werden Zustands-Anzeigen mit den Zuständen stabil oder instabil verwendet. Die Färbung eines Zustands verdeutlicht den Status (rot: insta-bil, grün: stabil). Die Regelgüte wird mit Hilfe eines animierten Balkendiagramms dar-gestellt. Die Länge des Balkens ändert sich mit Änderung der Soll/Ist-Abweichung. Wird die Differenz zwischen Soll und Ist zu groß (Ausschlag des Balkens), wird der Balken rot gefärbt. Oben links sind als HUD (Head-Up-Display) die Systemkomponen-ten der übergreifenden Regelung dargestellt: die Spurführungsregelung und die Über-wachung- und Diagnostik.
Des Weiteren sind die Komponenten der lokalen Regelung dargestellt: Lenkung links, Lenkung rechts, Sturz links und Sturz rechts. Jede der Komponenten kann den Status aktiv, inaktiv oder ausgefallen annehmen, welcher durch einen farbigen Rahmen ange-zeigt wird. Im Bild sind aktuell beide Regler zur Lenkung aktiv (grün), die zum Stürzen inaktiv. Auch die Aktorik zur Lenkung ist aktiv. Dies ist zum einen durch die Bewe-gung der Räder deutlich, zum anderen wird sie durch die zusätzliche Visualisierung des
Seite 28 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Lenkwinkels Mit Hilfe von Halbkreisen verdeutlicht. Dabei stellt ein Halbkreis eine Skala von einer Lenkwinkelgröße zwischen -3° und 3° dar. Die aktuelle Größe des Lenkwinkels wird kenntlich gemacht, indem der entsprechende Anteil des Halbkreises eingefärbt wird (siehe dunkelblaues Kreissegment).
Bild 15: Darstellung der übergeordneten Regelung und der Lenkwinkel der Fahrwerks-
Aktorik
Mit Hilfe der VR-Anwendung und den Visualisierungstechniken kann ein Entwickler seinen Regler zur Lenkung überprüfen. Der Vorteil ist, dass er interne Parameter und Systemgrößen der Regler sowie den Status der übergeordneten Regelung sieht und der Zusammenhang zwischen Umgebung und Verhalten sofort ersichtlich ist. Am realen Prüfstand ist dieser Zusammenhang nicht direkt sichtbar.
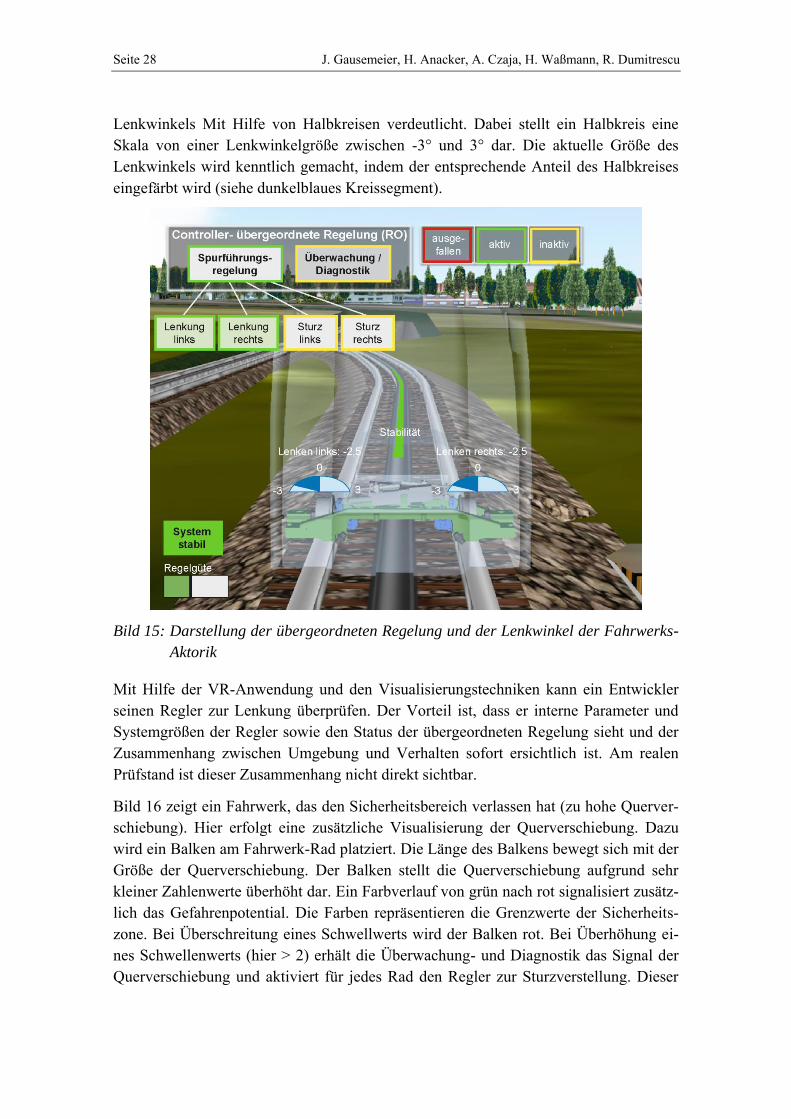
Bild 16 zeigt ein Fahrwerk, das den Sicherheitsbereich verlassen hat (zu hohe Querver-schiebung). Hier erfolgt eine zusätzliche Visualisierung der Querverschiebung. Dazu wird ein Balken am Fahrwerk-Rad platziert. Die Länge des Balkens bewegt sich mit der Größe der Querverschiebung. Der Balken stellt die Querverschiebung aufgrund sehr kleiner Zahlenwerte überhöht dar. Ein Farbverlauf von grün nach rot signalisiert zusätz-lich das Gefahrenpotential. Die Farben repräsentieren die Grenzwerte der Sicherheits-zone. Bei Überschreitung eines Schwellwerts wird der Balken rot. Bei Überhöhung ei-nes Schwellenwerts (hier > 2) erhält die Überwachung- und Diagnostik das Signal der Querverschiebung und aktiviert für jedes Rad den Regler zur Sturzverstellung. Dieser
Auf dem Weg zu intelligenten technischen Systemen Seite 29
Zusammenhang ist durch eine gestrichelte Linie vom entsprechenden Rad zur abstrak-ten Systemkomponente Überwachung und Diagnostik dargestellt.
Bild 16: Aktivierung der Regler zur Sturzverstellung aufgrund zu hoher Querverschie-
bung des Fahrwerks im Gleis
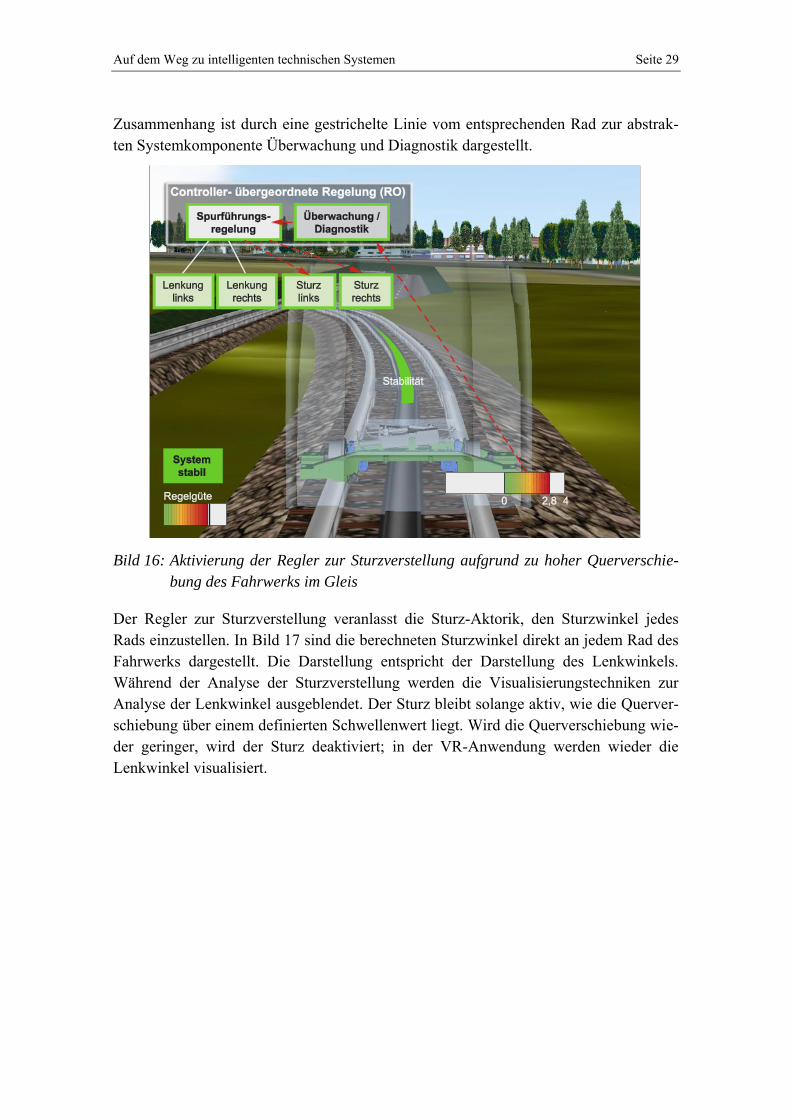
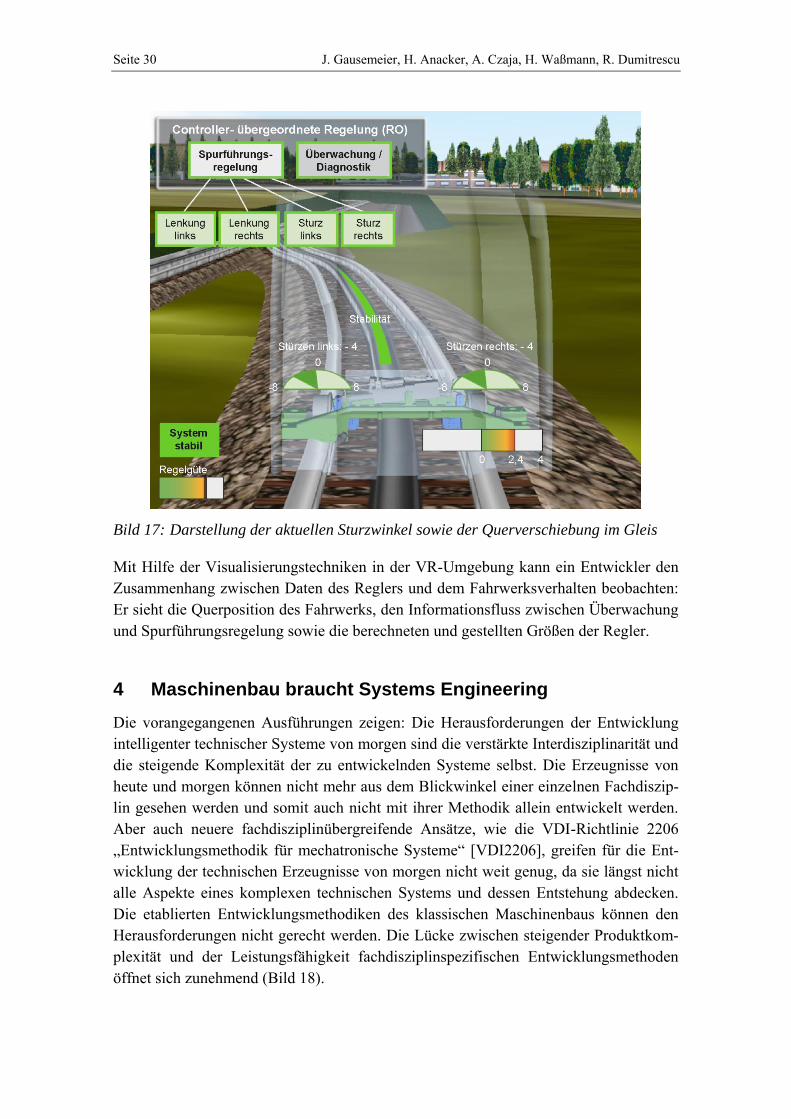
Der Regler zur Sturzverstellung veranlasst die Sturz-Aktorik, den Sturzwinkel jedes Rads einzustellen. In Bild 17 sind die berechneten Sturzwinkel direkt an jedem Rad des Fahrwerks dargestellt. Die Darstellung entspricht der Darstellung des Lenkwinkels. Während der Analyse der Sturzverstellung werden die Visualisierungstechniken zur Analyse der Lenkwinkel ausgeblendet. Der Sturz bleibt solange aktiv, wie die Querver-schiebung über einem definierten Schwellenwert liegt. Wird die Querverschiebung wie-der geringer, wird der Sturz deaktiviert; in der VR-Anwendung werden wieder die Lenkwinkel visualisiert.
Seite 30 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Bild 17: Darstellung der aktuellen Sturzwinkel sowie der Querverschiebung im Gleis
Mit Hilfe der Visualisierungstechniken in der VR-Umgebung kann ein Entwickler den Zusammenhang zwischen Daten des Reglers und dem Fahrwerksverhalten beobachten: Er sieht die Querposition des Fahrwerks, den Informationsfluss zwischen Überwachung und Spurführungsregelung sowie die berechneten und gestellten Größen der Regler.
4 Maschinenbau braucht Systems Engineering
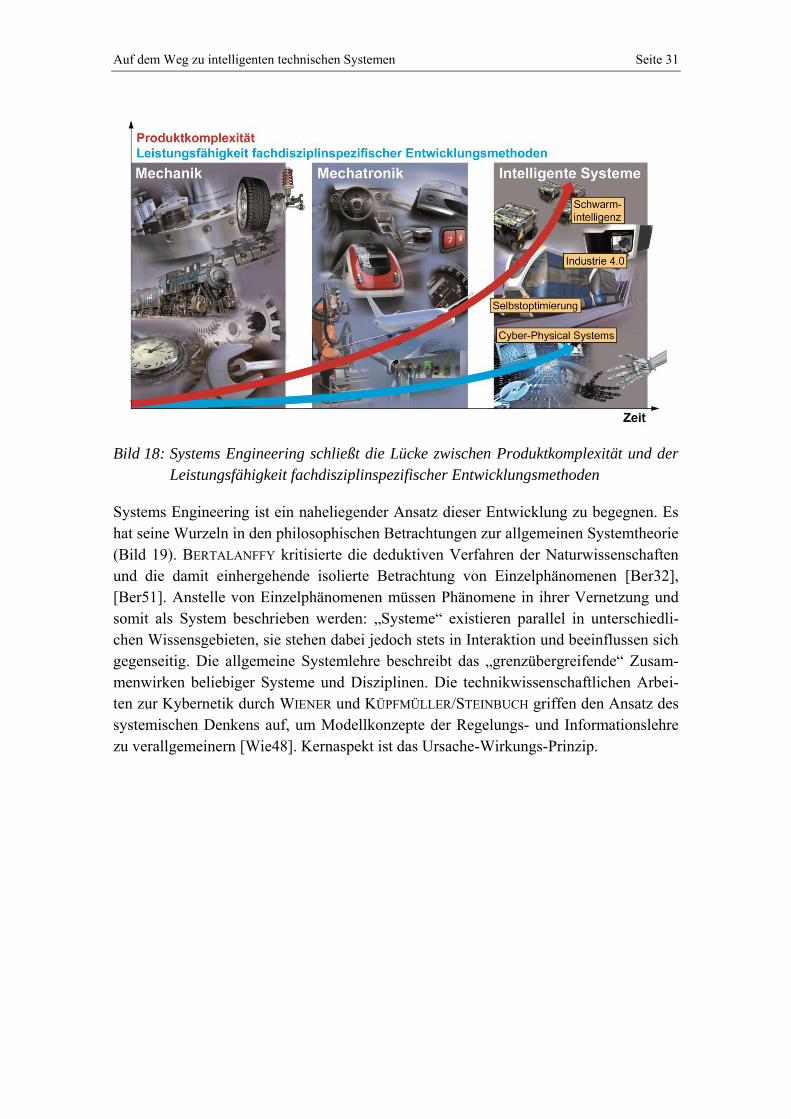
Die vorangegangenen Ausführungen zeigen: Die Herausforderungen der Entwicklung intelligenter technischer Systeme von morgen sind die verstärkte Interdisziplinarität und die steigende Komplexität der zu entwickelnden Systeme selbst. Die Erzeugnisse von heute und morgen können nicht mehr aus dem Blickwinkel einer einzelnen Fachdiszip-lin gesehen werden und somit auch nicht mit ihrer Methodik allein entwickelt werden. Aber auch neuere fachdisziplinübergreifende Ansätze, wie die VDI-Richtlinie 2206 „Entwicklungsmethodik für mechatronische Systeme“ [VDI2206], greifen für die Ent-wicklung der technischen Erzeugnisse von morgen nicht weit genug, da sie längst nicht alle Aspekte eines komplexen technischen Systems und dessen Entstehung abdecken. Die etablierten Entwicklungsmethodiken des klassischen Maschinenbaus können den Herausforderungen nicht gerecht werden. Die Lücke zwischen steigender Produktkom-plexität und der Leistungsfähigkeit fachdisziplinspezifischen Entwicklungsmethoden öffnet sich zunehmend (Bild 18).
Auf dem Weg zu intelligenten technischen Systemen Seite 31
Bild 18: Systems Engineering schließt die Lücke zwischen Produktkomplexität und der
Leistungsfähigkeit fachdisziplinspezifischer Entwicklungsmethoden
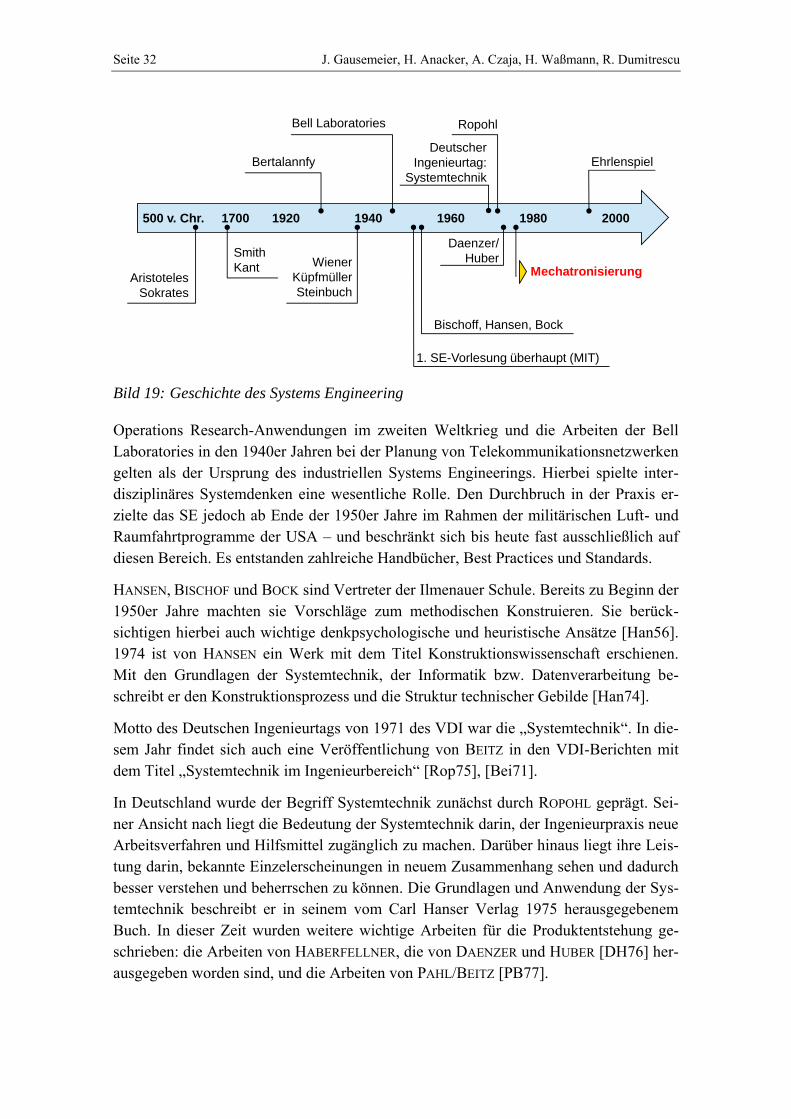
Systems Engineering ist ein naheliegender Ansatz dieser Entwicklung zu begegnen. Es hat seine Wurzeln in den philosophischen Betrachtungen zur allgemeinen Systemtheorie (Bild 19). BERTALANFFY kritisierte die deduktiven Verfahren der Naturwissenschaften und die damit einhergehende isolierte Betrachtung von Einzelphänomenen [Ber32], [Ber51]. Anstelle von Einzelphänomenen müssen Phänomene in ihrer Vernetzung und somit als System beschrieben werden: „Systeme“ existieren parallel in unterschiedli-chen Wissensgebieten, sie stehen dabei jedoch stets in Interaktion und beeinflussen sich gegenseitig. Die allgemeine Systemlehre beschreibt das „grenzübergreifende“ Zusam-menwirken beliebiger Systeme und Disziplinen. Die technikwissenschaftlichen Arbei-ten zur Kybernetik durch WIENER und KÜPFMÜLLER/STEINBUCH griffen den Ansatz des systemischen Denkens auf, um Modellkonzepte der Regelungs- und Informationslehre zu verallgemeinern [Wie48]. Kernaspekt ist das Ursache-Wirkungs-Prinzip.
Seite 32 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Bild 19: Geschichte des Systems Engineering
Operations Research-Anwendungen im zweiten Weltkrieg und die Arbeiten der Bell Laboratories in den 1940er Jahren bei der Planung von Telekommunikationsnetzwerken gelten als der Ursprung des industriellen Systems Engineerings. Hierbei spielte inter-disziplinäres Systemdenken eine wesentliche Rolle. Den Durchbruch in der Praxis er-zielte das SE jedoch ab Ende der 1950er Jahre im Rahmen der militärischen Luft- und Raumfahrtprogramme der USA – und beschränkt sich bis heute fast ausschließlich auf diesen Bereich. Es entstanden zahlreiche Handbücher, Best Practices und Standards.
HANSEN, BISCHOF und BOCK sind Vertreter der Ilmenauer Schule. Bereits zu Beginn der 1950er Jahre machten sie Vorschläge zum methodischen Konstruieren. Sie berück-sichtigen hierbei auch wichtige denkpsychologische und heuristische Ansätze [Han56]. 1974 ist von HANSEN ein Werk mit dem Titel Konstruktionswissenschaft erschienen. Mit den Grundlagen der Systemtechnik, der Informatik bzw. Datenverarbeitung be-schreibt er den Konstruktionsprozess und die Struktur technischer Gebilde [Han74].
Motto des Deutschen Ingenieurtags von 1971 des VDI war die „Systemtechnik“. In die-sem Jahr findet sich auch eine Veröffentlichung von BEITZ in den VDI-Berichten mit dem Titel „Systemtechnik im Ingenieurbereich“ [Rop75], [Bei71].
In Deutschland wurde der Begriff Systemtechnik zunächst durch ROPOHL geprägt. Sei-ner Ansicht nach liegt die Bedeutung der Systemtechnik darin, der Ingenieurpraxis neue Arbeitsverfahren und Hilfsmittel zugänglich zu machen. Darüber hinaus liegt ihre Leis-tung darin, bekannte Einzelerscheinungen in neuem Zusammenhang sehen und dadurch besser verstehen und beherrschen zu können. Die Grundlagen und Anwendung der Sys-temtechnik beschreibt er in seinem vom Carl Hanser Verlag 1975 herausgegebenem Buch. In dieser Zeit wurden weitere wichtige Arbeiten für die Produktentstehung ge-schrieben: die Arbeiten von HABERFELLNER, die von DAENZER und HUBER [DH76] her-ausgegeben worden sind, und die Arbeiten von PAHL/BEITZ [PB77].
500 v. Chr. 1700
Aristoteles
Sokrates
Smith
Kant
Bertalannfy
Wiener
Küpfmüller
Steinbuch
1. SE-Vorlesung überhaupt (MIT)
Bell Laboratories
Ehrlenspiel
Ropohl
20001920 1940 1960 1980
Daenzer/
Huber
Deutscher
Ingenieurtag:
Systemtechnik
Bischoff, Hansen, Bock
Mechatronisierung
Auf dem Weg zu intelligenten technischen Systemen Seite 33
Das systemische Denken und die Mechatronisierung sind thematisch eng verbunden. Die voranschreitende Mechatronisierung setzt das systematische Denken in der Pro-duktentwicklung voraus. Paradoxerweise wurde das systemische Denken mit der auf-kommende Mechatronisierung in der Ende der 1970er Jahre aber nicht weiter vorange-trieben. Vielmehr wurden gerade in den 1980er Jahren in der Konstruktionslehre spezi-elle Aspekte fokussiert, wie z.B. Kosten, Arbeitsmethoden, Variantenkonstruktion, Vorgehensmodelle, Qualitätsmanagement und Konstruktionskataloge. Das zeigt sich bspw. in den Arbeiten von ROTH [Rot82], FRANKE [Fra85] oder KOLLER [Kol85]. Dar-über hinaus steht auch die Automatisierung und Unterstützung der Konstruktion durch CAD stark im Mittelpunkt der Arbeiten. Parallel hierzu steht in der Fertigung die Ferti-gungsrationalisierung im Fokus.
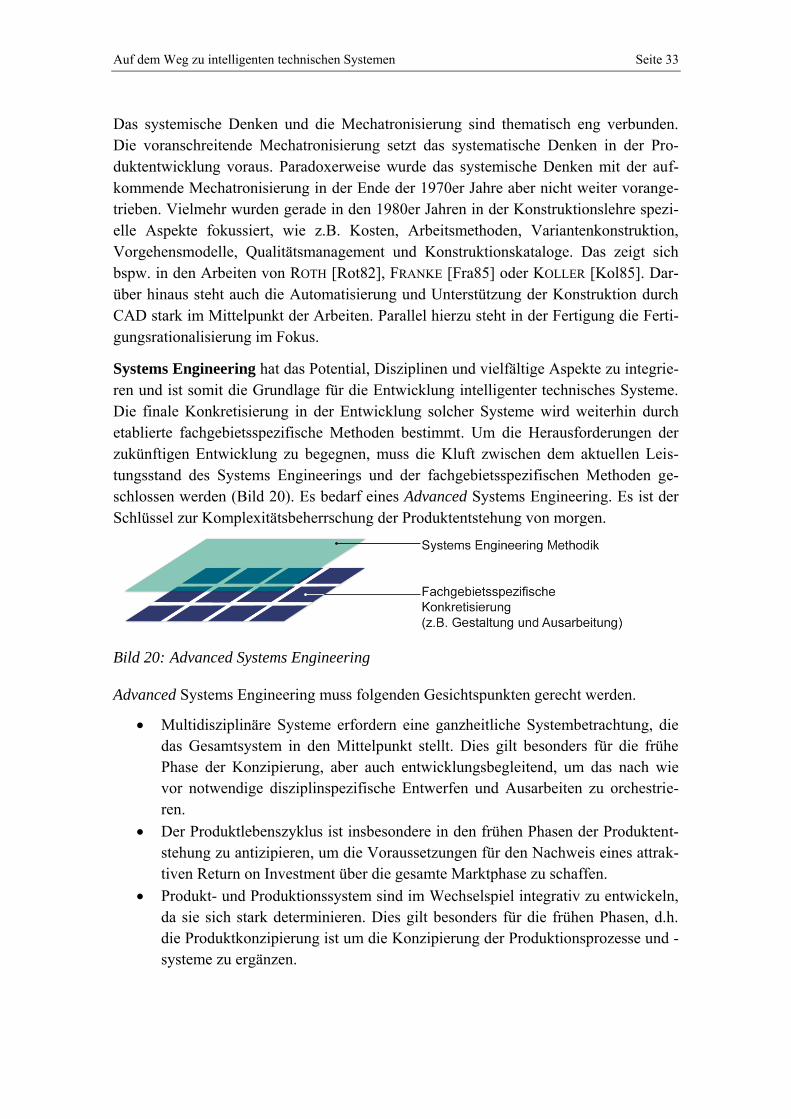
Systems Engineering hat das Potential, Disziplinen und vielfältige Aspekte zu integrie-ren und ist somit die Grundlage für die Entwicklung intelligenter technisches Systeme. Die finale Konkretisierung in der Entwicklung solcher Systeme wird weiterhin durch etablierte fachgebietsspezifische Methoden bestimmt. Um die Herausforderungen der zukünftigen Entwicklung zu begegnen, muss die Kluft zwischen dem aktuellen Leis-tungsstand des Systems Engineerings und der fachgebietsspezifischen Methoden ge-schlossen werden (Bild 20). Es bedarf eines Advanced Systems Engineering. Es ist der Schlüssel zur Komplexitätsbeherrschung der Produktentstehung von morgen.
Bild 20: Advanced Systems Engineering
Advanced Systems Engineering muss folgenden Gesichtspunkten gerecht werden.
Multidisziplinäre Systeme erfordern eine ganzheitliche Systembetrachtung, die das Gesamtsystem in den Mittelpunkt stellt. Dies gilt besonders für die frühe Phase der Konzipierung, aber auch entwicklungsbegleitend, um das nach wie vor notwendige disziplinspezifische Entwerfen und Ausarbeiten zu orchestrie-ren.
Der Produktlebenszyklus ist insbesondere in den frühen Phasen der Produktent-stehung zu antizipieren, um die Voraussetzungen für den Nachweis eines attrak-tiven Return on Investment über die gesamte Marktphase zu schaffen.
Produkt- und Produktionssystem sind im Wechselspiel integrativ zu entwickeln, da sie sich stark determinieren. Dies gilt besonders für die frühen Phasen, d.h. die Produktkonzipierung ist um die Konzipierung der Produktionsprozesse und -systeme zu ergänzen.

Seite 34 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Das Geschehen in der Produktentstehung muss als vernetztes sozio-technisches System verstanden werden. Nur so lassen sich die Akzeptanzprobleme von Systematik und me-thodischem Vorgehen, die jeder Führungskraft in der Produktentstehung bestens be-kannt sind, überwinden.
Die Forschungsarbeiten des Heinz Nixdorf Instituts greifen genau diesen Bedarf auf. Ziel ist eine neue Schule des Entwurfs für Intelligente Technische Systeme. Dies umfasst das Erarbeiten und Etablieren neuer Vorgehensmodelle, Spezifikations- und Modellie-rungstechniken in der Produktentwicklung. Außerdem werden dedizierte Methoden und IT-Werkzeuge zur Synthese und Analyse der Systeme erforscht. Entsprechende Aus- und Weiterbildungsprogramme sichern den erfolgreichen Transfer der Ergebnisse.
Literatur
[ADG+09] ADELT, P.; DONOTH, J.; GAUSEMEIER, J.; GEISLER, J.; HENKLER, S.; KAHL, S.; KLÖPPER, B.; KRUPP, A.; MÜNCH, E.; OBERTHÜR, S.; PAIZ, C.; PORRMANN, M.; RADKOWSKI, R.; ROM-AUS, C.; SCHMIDT, A.; SCHULZ, B.; VÖCKING, H.; WITKOWSKI, U.; WITTING, K.; ZNA-MENSHCHYKOV, O.: Selbstoptimierende Systeme des Maschinenbaus – Definition, Anwen-dungen, Konzepte. HNI-Verlagsschriftenreihe, Band 234, Paderborn, 2009
[AIS+77] ALEXANDER, C.; ISHIKAWA, S.; SILVERSTEIN, M.; JACOBSON, M.; FIKSDAHLKING, I.; AN-GEL, S.: A Pattern Language – Towns, Buildings, Construction. Oxford University Press, 1st Edition, 1977
[Bei71] BEITZ, W.: Systemtechnik im Ingenieurbereich. VDI-Berichte Nr. 174. VDI-Verlag, Düs-seldorf, 1971
[Ber32] BERTALANFFY, L. VON: Theoretische Biologie, 1932
[Ber51] BERTALANFFY, L. VON: General system theory: A new approach to unity of science. John Hopkins Press, 1951
[BF04] BADKE-SCHAUB, P.; FRANKENBERGER, E.: Management kritischer Situationen – Produkt-entwicklung erfolgreich gestalten. Springer Verlag, Berlin, 2004
[BHL01] BERNERS-LEE, T.; HENDLER, J.; LASSILA, O.: The semantic web. Scientific American, 2001
[Bon96] Bono, de E.: Serious Creativity – Die Entwicklung neuer Ideen durch die Kraft des latera-len Denkens. Schäffer-Poeschel Verlag, Stuttgart, 1996
[BT11] BORZYKH, M.; TRÄCHTLER, A.: RailCab – Ein Schienenverkehrsmittel mit autonomen Ein-zelfahrzeugen und innovativer Spurführungstechnik. In: 11. Internationale Schienenfahr-zeugtagung Dresden, 23.-25. Feb. 2011, Dresden, 2011
[DH76] DAENZER, W.F.; HUBER, F.: Systems Engineering – Methodik und Praxis. Verlag Industri-elle Organisation, Zürich, 1976
[DGR11] DUMITRESCU, R.; GAUSEMEIER, J; ROMAUS, C.: Towards the Design of Cognitive Functions in Self-Optimizing Systems Exemplified by a Hybrid Energy Storage System. In: Burrows, C.R. (Ed.): Proceedings of the Institution of Mechanical Engineers Part I: Journal of Sys-tems and Control Engineering, 226(5), 2011
[Dum10] DUMITRESCU, R.: Entwicklungssystematik zur Integration kognitiver Funktionen in fortge-schrittene mechatronische Systeme. Dissertation, Fakultät für Maschinenbau, Universität Paderborn, HNI-Verlagsschriftenreihe, Band 286, Paderborn 2012
[Dyn10] Dynasim AB: Dynamic Modeling Laboratory – User Manual. Ideon Sciene Park, Lund, 2010
Auf dem Weg zu intelligenten technischen Systemen Seite 35
[eCl@ss] The leading classification system. Unter: http://www.eclass.de, 5. März 2013
[FGN+00] FRICKE, E., GEBHARD, B., NEGELE, H., IGENBERGS, E.: Coping with Changes: Causes, Find-ings, and Strategies, Systems Engineering, Vol.3, 2000
[Foe08] FÖLLINGER, O.: Regelungstechnik – Einführung in die Methoden und ihre Anwendung. Hüthig Verlag, Heidelberg, 2008
[Fra85] FRANKE, H.-J.: Konstruktionsmethodik und Konstruktionspraxis – eine kritische Betrach-tung. In: 3rd International Conference on Engineering Design - ICED'85. August 26th-28th 1985, Hamburg, Heuristika Verlag, Zürich, 1985
[Gau10] GAUSEMEIER, J. (Hrsg.): Frühzeitige Zuverlässigkeitsanalyse mechatronischer Systeme. Carl Hanser Verlag, München, 2010
[GEK01] GAUSEMEIER, J.; EBBESMEYER, P.; KALLMEYER, F.: Produktinnovation – Strategische Pla-nung und Entwicklung der Produkte von morgen. Carl Hanser Verlag, München, 2001
[GF06] GAUSEMEIER, J.; FELDMANN, K.: Integrative Entwicklung räumlicher elektronischer Bau-gruppen. Carl Hanser Verlag, München, 2006
[GFD+08] GAUSEMEIER, J.; FRANK, U.; DONOTH, J.; KAHL, S.: Spezifikationstechnik zur Beschreibung der Prinziplösung selbstoptimierender Systeme des Maschinenbaus .In Konstruktion: Teil 1 in 7/8 – 2008, Teil 2 in 9 – 2008, VDI Verlag, Berlin, 2008
[GHJ+94] GAMMA, E.; HELM, R.; JOHNSON, R.; VLISSIDES, J.: Design-Patterns – Elements of Reusable Object-Oriented Software. Addison-Wesley Verlag, München, 1994
[GLL12] GAUSEMEIER, J.; LANZA, G.; LINDEMANN, U.: Produkte und Produktionssysteme integrativ konzipieren – Modellbildung und Analyse in der frühen Phase der Produktentstehung. Carl Hanser Verlag, München, 2012
[GR11-ol] GANTZ, J.; REINSEL, D.: Extracting Value from Chaos. Unter: http://germany.emc.com, 5. März 2013
[Han56] HANSEN, F.: Konstruktionssystematik. VEB-Verlag Technik, Berlin, 1956
[Han74] HANSEN, F.: Konstruktionswissenschaft – Grundlagen und Methoden. Carl Hanser Verlag, München, 1974
[HHL10] HELLENBRAND, D.; HELTEN K.; LINDEMANN U.: Approach for development cost estimation in early design phases. In: Proceedings of the Design 2010 – 11th International Design Conference. May 17-20 2010, Dubrovnik, Croatia, 2010
[HTS+08] HENKE, C.; TICHY, M.; SCHNEIDER, T.; BÖCKER, J.; SCHÄFER, W.: Organization and control of autonomous railway concoys. In: Proceedings of the 9th International Symposium on Advanced Vehicle Control (AVEC‘08), Kobe, Japan, 2008
[HWK+12] HASSAN B.; WAßMANN, H.; KLAAS, A.; KEßLER, J.H.: Cascaded Heterogeneous Simulations for Analysis of Mechatronic Systems in Large Scale Transportation Scenarios. In: Proceed-ings of the 2012 Spring Simulation Multi-Conference, 26-29 March 2012, Orlando, FL, USA, Spring Simulation Multiconference Books: Emerging M&S Applications in Industry & Academia Symposium (EAIA), 2012
[Kah12] KAHL, S.: Rahmenwerk für einen selbstoptimierenden Entwicklungsprozess fortschrittlicher mechatronischer Systeme. Dissertation, Fakultät für Maschinenbau, Universität Paderborn, HNI-Verlagsschriftenreihe, Band 308, Paderborn, 2012
[KHL11] KISSEL, M.P.; HELLENBRAND, D.; LINDEMANN, U.: A Methodology to Evaluate the Struc-tural Robustness of Product Concepts. Proceedings International Conference on Enginee-ring Design, ICED’11, Kopenhagen, 2011
[KHS+11] KISSEL, M.P., HELLENBRAND, D., SCHULLERUS, W., LINDEMANN, U.: Robustheitsbewertung von Produktkonzepten in frühen Entwicklungsphasen. In: Gausemeier, J.; Schäfer, F.;
Seite 36 J. Gausemeier, H. Anacker, A. Czaja, H. Waßmann, R. Dumitrescu
Trächtler, A. (Hrsg.): 8. Paderborner Workshop – Entwurf mechatronischer Systeme. 19./20. Mai 2011, HNI-Verlagsschriftenreihe, Band 294, Paderborn, 2011
[Kol85] KOLLER, R.: Konstruktionslehre für den Maschinenbau. Grundlagen, Arbeitsschritte, Prin-ziplösungen. Springer-Verlag, Berlin, 1985
[Lan00] LANGLOTZ, G.: Ein Beitrag zur Funktionsstrukturentwicklung innovativer Produkte. Disser-tation, Fakultät für Maschinenbau, Universität Karlsruhe, Shaker Verlag, Aachen, 2000
[Mod09] Modelica Association: Modelica® A Unified Object-Oriented Language for Physical Sys-tems Modeling – Language Specification – Version 3.1. Linköping, Sweden, 2009
[PB77] PAHL, G.; BEITZ, W.: Konstruktionslehre – Methoden und Anwendung. Springer-Verlag, Berlin, 1977
[PBF+07] PAHL, G.; BEITZ, W.; FELDHUSEN, J.; GROTE, K.-H.: Konstruktionslehre – Grundlagen er-folgreicher Produktentwicklung – Methoden und Anwendung. Springer Verlag, Berlin, 7. Auflage, 2007
[Rop75] ROPOHL, G.: Einleitung in die Systemtechnik. In: Ropohl (Hrsg.) Systemtechnik – Grund-lagen und Antworten, Carl Hanser Verlag, München, 1975
[Rot82] ROTH, K.: Konstruieren mit Konstruktionskatalogen. Springer-Verlag, Berlin, 1982
[Rot01] ROTH, K.: Konstruieren mit Konstruktionskatalogen: Band 2 – Kataloge. Springer Verlag, Berlin, 3. Auflage, 2001
[RW08] RADKOWSKI, R.; WAßMANN, H.: Echtzeit-Visualisierung eines sturzvariablen Fahrwerks zur Analyse des Fahrverhaltens. In: Gausemeier, J.; Grafe, M.: (Hrsg.) 7. Paderborner Work-shop, Augmented & Virtual Reality in der Produktentstehung, 5.-6. Juni 2008, HNI-Verlagsschriftenreihe, Band 232, S. 43-60, Paderborn, 2008
[SK97] SPUR, G.; KRAUSE, F.-L.: Das virtuelle Produkt. Carl Hanser Verlag, München, Wien, 1997
[Ste07] STEFFEN, D.: Ein Verfahren zur Produktstrukturierung für fortgeschrittene mechatronische Systeme. Dissertation, Fakultät für Maschinenbau, Universität Paderborn, HNI-Verlagsschriftenreihe, Band 207, Paderborn, 2007
[Str98] STRUBE, G.: Modelling Motivation and Action Control in Cognitive Systems. In: Schmid, U.; Krems, J. F.; Wysocki, F.: Mind Modelling. Pabst, Berlin, 1998
[TZZ98] TERNINKO, J.; ZUSMAN, A.; ZLOTIN, B.: TRIZ – der Weg zum konkurrenzlosen Erfolgspro-dukt, Ideen produzieren, Nischen besetzen, Märkte gewinnen. Verlag Moderne Industrie, Landsberg/Lech, 1998
[VDI2206] VEREIN DEUTSCHER INGENIEURE (VDI): Entwicklungsmethodik für mechatronische Syste-me. VDI-Richtlinie 2206, Beuth-Verlag, Berlin, 2004
[VDI2860] VEREIN DEUTSCHER INGENIEURE (VDI): Montage- und Handhabungstechnik - Handha-bungsfunktionen, Handhabungseinrichtungen; Begriffe, Definitionen, Symbole. VDI-Richtlinie 2860, Beuth Verlag, Berlin, 1990
[Wie48] WIENER, N.: Cybernetics: Or the Control and Communication in the Animal and the Ma-chine. MIT Press, Cambridge, Massachusetts, 1948
Auf dem Weg zu intelligenten technischen Systemen Seite 37
Autoren
Prof. Dr.-Ing. Jürgen Gausemeier ist Professor für Produktentstehung am Heinz Nixdorf Institut. Er promovierte an der TU Berlin bei Prof. Spur. In seiner zwölfjähri-gen Industrietätigkeit war Dr. Gausemeier Entwicklungschef für CAD/CAM-Systeme und zuletzt Leiter des Geschäftsbereiches Prozessleitsysteme. Er ist Mitglied des Vor-stands und Geschäftsführer der Wissenschaftlichen Gesellschaft für Produktentwicklung (WiGeP). Ferner ist er Initiator und Aufsichtsratsvorsitzender des Beratungsunterneh-mens UNITY AG. Herr Gausemeier ist Vizepräsident von acatech – Deutsche Akade-mie der Technikwissen-schaften. 2012 wurde er erneut in den Wissenschaftsrat berufen.
Dipl.-Ing. Harald Anacker ist wissenschaftlicher Mitarbeiter am Lehrstuhl für Pro-duktentstehung bei Prof. Gausemeier am Heinz Nixdorf Institut der Universität Pader-born. Im Rahmen seiner Tätigkeit arbeitet er an Methoden und Werkzeugen für den Entwurf mechatronischer Systeme.
Dipl.-Wirt.-Ing. Anja Czaja ist wissenschaftliche Mitarbeiterin am Lehrstuhl für Pro-duktentstehung bei Prof. Gausemeier am Heinz Nixdorf Institut der Universität Pader-born. Im Rahmen ihrer Tätigkeit arbeitet sie an Methoden und Werkzeugen für den Entwurf mechatronischer Systeme.
Dr. Helene Waßmann studierte Informatik an der Universität Paderborn. Ihre Schwer-punkte lagen im Bereich der Computergrafik und der Digitalen Bildverarbeitung. Seit 2007 ist sie Wissenschaftliche Mitarbeiterin am Lehrstuhl für Produktentstehung (Prof. Dr.-Ing. Gausemeier) des Heinz Nixdorf Instituts. Hier beschäftigt sie sich mit der Vi-sualisierung technischer Systeme mit Hilfe der Technologien Virtual Reality and Aug-mented Reality.
Dr.-Ing. Roman Dumitrescu studierte Mechatronik an der Friedrich-Alexander-Universität Erlangen-Nürnberg. Im Anschluss war er wissenschaftlicher Mitarbeiter am Lehrstuhl für Produktentstehung am Heinz Nixdorf Institut der Universität Paderborn. Unter der Leitung von Prof. Dr.-Ing. Jürgen Gausemeier promovierte er 2010 im Be-reich Systems Engineering für intelligente mechatronische Systeme. Seitdem leitet er in der Projektgruppe Entwurfstechnik Mechatronik des Fraunhofer-Instituts für Produkti-onstechnologie IPT die Abteilung Produktentstehung. Ferner ist er Geschäftsführer des Spitzenclusters Intelligente Technische Systeme OstWestwalenLippe (it´s OWL) und verantwortet den Bereich Strategie und FuE.





























