Embed Size (px)
Citation preview

Universidade Presbiteriana Mackenzie
Curso de Engenharia Eletrica
Automacao e Controle I
Notas de Aula
Prof. Marcio Eisencraft
Segundo semestre de 2006

Universidade Presbiteriana Mackenzie
Curso de Engenharia Eletrica
Automacao e Controle I
TEORIA
Prof. Marcio Eisencraft
Segundo semestre de 2006

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
1
Universidade Presbiteriana Mackenzie
Automação e Controle I
Professor Marcio Eisencraft ([email protected])
2º Semestre 2006
1. Objetivos
Introduzir os fundamentos matemáticos de Automação e Controle e ilustrar al-
gumas de suas aplicações à Engenharia de Produção.
2. Aulas de Teoria e Prática
Nas aulas de prática serão vistas aplicações dos assuntos abordados nas aulas
de teoria. Serão utilizados kits didáticos e a ferramenta computacional Ma-
tlab, principalmente seu ferramental (toolbox) para a área de controle.
Aulas de exercícios serão realizadas próximo das datas das provas.
3. Avaliação
Serão realizadas três avaliações versando sobre o conteúdo visto nas aulas de
teoria e de prática.
O aluno estará aprovado caso consiga média maior ou igual a 7,0 e estará re-
provado caso consiga média inferior a 5,5. Se a média ficar entre 5,5 e 6,9 o
aluno será aprovado caso possua mais de 80% de presença em aula, caso con-
trário estará reprovado.
Cada avaliação será constituída de duas notas:
o Nota da Prova – 0,0 a 9,0
o Nota de Relatórios da Aula Prática e Trabalhos– 0,0 a 1,5

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
2
Nas aulas de prática os alunos formarão grupos de um ou dois alunos. Ao
final de todas as aulas será passada uma atividade a ser entregue pelo grupo
no início da aula prática seguinte. A tolerância para entrega desta atividade é
de 10 minutos.
Importante: O relatório deve ser entregue em folha de papel A4 cons-
tando dos nomes, números de matrículas e número da aula à qual a ati-
vidade se refere. FORA DESSAS CONDIÇÕES, O RELATÓRIO NÃO
SERÁ ACEITO.
Os relatórios das aulas de prática formarão uma nota indo de 0,0 a 1,0. Antes
de cada prova será passado um trabalho envolvendo tópicos da ementa do
curso que valerá 0,5 ponto complementando 1,5 pontos.
Será considerado presente o aluno que estiver em sala no momento em que é
realizada a chamada. Não serão abonadas faltas (exceto casos previstos em
lei). A tolerância para entrada na aula é de 30min.
Para que o grupo tenha presença nas aulas de prática é indispensável que pelo
menos um dos componentes tenha a apostila da aula.
As provas serão realizadas no horário das aulas de teoria nos seguintes dias:
PROVA Turma F (3ª feira) Peso
P1 05/09 Peso 1
P2 10/10 Peso 1
P3 A ser definida Peso 2
4. Conteúdo Programático
1. Introdução (NISE, 2002, pp. 2-25)

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
3
1.1. Introdução
1.2. História dos Sistemas de Controle
1.3. O Engenheiro e sistemas de controle e automação
1.4. Características da resposta e configurações de sistemas
1.5. Objetivos de análise e de projeto
1.6. Procedimento de projeto
1.7. Projeto assistido por computador (CAD)
2. Modelagem no domínio da freqüência (NISE, 2002, pp. 27-88).
2.1. Revisão sobre transformada de Laplace
2.2. Função de transferência
2.3. Modelagem de circuitos elétricos
2.4. Modelagem de sistemas mecânicos em translação
2.5. Modelagem de sistemas mecânicos em rotação
2.6. Modelagem de sistemas com engrenagens
2.7. Modelagem de sistemas eletromecânicos
2.8. Estudo de caso
3. Modelagem no domínio do tempo (NISE, 2002, pp. 90-122).
3.1. Introdução
3.2. Observações
3.3. Representação geral no espaço de estados
3.4. Aplicando a representação no espaço de estados
3.5. Conversão de função de transferência para espaço de estados
3.6. Conversão de espaço de estados para função de transferência
3.7. Estudo de caso
4. Resposta no domínio do tempo (NISE, 2002, pp. 123-177).
4.1. Introdução
4.2. Pólos, zeros e resposta do sistema.
4.3. Sistemas de primeira ordem
4.4. Sistemas de segunda ordem: Introdução
4.5. Sistemas de segunda ordem geral

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
4
4.6. Sistemas de segunda ordem sub-amortecidos
4.7. Solução das equações de estado pela transformada de Laplace
4.8. Estudos de caso
5. Redução de sistemas múltiplos (NISE, 2002, pp. 179-233).
5.1. Introdução
5.2. Diagramas de blocos
5.3. Análise e projeto de sistemas com retroação
5.4. Diagramas de fluxo de sinal
5. Bibliografia
A cada aula (de teoria e de prática), notas de aula serão disponibilizadas
no site http://meusite.mackenzie.com.br/marcioft/ . Além disso, listas de exercí-
cios serão fornecidas.
A principal referência que será utilizada durante todo o curso é
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC,
c2002. 695 p. ISBN 8521613016.
Outras referências disponíveis em vários exemplares na biblioteca:
CHAPMAN, Stephen J. Programação em MATLAB para engenheiros.
São Paulo: Pioneira Thomson Learning, 2003. 477 p. ISBN 8522103259.
DISTEFANO, J. J.; STUBBERUD, A. R.; WILLIAMS, I. J. Schaum´s out-
line of theory and problems of feedback control systems. 2nd edition, New
York: McGraw-Hill, 1990. 496p. ISBN 0070170525.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro:
LTC, 2001. 659 p. ISBN 0201308649.
HAYKIN, Simon; VAN VEEN, Barry. Sinais e sistemas. Porto alegre: Bo-
okman, 2001. 668 p. : il. (algumas ISBN 8573077417).
LATHI, Bhagwandas Pannalal. Signal processing and linear systems. Cali-
fornia: Berkeley, c1998. 734 p. ISBN 0941413357.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
5
Manual for Model 730 – Magnetic Levitation System. ECP, 1999.
MATSUMOTO, Élia Yathie. Simulink 5. São Paulo: Érica, 2003. 204 p. : il.
; 25 cm ISBN 8571949379.
MITRA, Sanjit K. Digital signal processing : a computer-based approach.
2nd ed. Boston: McGraw-Hill, c2001. 866 p. : il. ; 24 cm ISBN 0072321059.
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janei-
ro: LTC, c2002. 695 p. ISBN 8521613016.
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo:
Prentice-Hall do Brasil, 2003. 788 p. ISBN 8587918230
PAZOS, Fernando. Automação de sistemas & robótica. Rio de janeiro:
Axcel Books, c2002. 377 p. : il. ; 23 cm ISBN 8573231718.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e reali-
mentação. São Paulo ; Rio de Janeiro: Makron, c1997. 558 p. ISBN
8534605963.
SILVEIRA, Paulo Rogério da; SANTOS, Winderson E. dos. Automação e
controle discreto. 2. ed. São Paulo: Érica, 1999. 229 p. : il. ; 24 cm ISBN
85-7194-591-8
6. Monitoria e atendimento
O monitor da disciplina e seu horário serão disponibilizados no site da disci-
plina assim que possível.
Atendimento pelo professor pode ser agendado por e-mail.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
1
Aula 1T - Introdução aos sistemas de controle Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 1-10.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 1-14.
CAPÍTULO 1 – Introdução Objetivos:
Definição e aplicações de sistemas de controle
Histórico
Benefícios
Características e configurações básicas
Projetos
1.1. Introdução
• Definição: um sistema de controle consiste em subsistemas e processos (ou
plantas) reunidos com o propósito de controlar as saídas dos processos. Isto é
mostrado esquematicamente na Figura 1.
Figura 1 – Descrição simplificada de um sistema de controle (NISE, 2002).
Exemplos:
(a) Controle de uma caldeira: calor produzido pelo fluxo de combustível. Ter-
mostatos (sensores) medem temperatura da sala e válvulas de combustível e atu-
adores de válvulas de combustível são usadas para regular a temperatura da sala
controlando a saída de calor da caldeira.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
2
(b) Pâncreas – regula açúcar no sangue.
(c) Olhos seguindo um objeto
(d) Peças mecânicas usinadas automaticamente.
Figura 2 - a. Os elevadores primitivos eram controlados por cabos manuais ou
por um operador de elevador. Aqui, uma corda é cortada para demonstrar o freio
de segurança, uma inovação nos elevadores primitivos; b. os modernos elevado-
res de transporte duplo fazem sua subida no Grande Arche em Paris, conduzido
por um motor, com cada carro contrabalançando o outro. Hoje, os elevadores
são completamente automáticos, usando sistemas de controle para regular posi-
ção e velocidade. (NISE, 2002).
Razões para se utilizar sistemas de controle:
(a) Amplificação de potência
Elevador hidráulico em postos de combustíveis.
(b) Controle remoto
Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
3
Robôs úteis em localidades remotas ou perigosas.
Figura 3 - O Rover foi construído para trabalhar nas áreas contaminadas de
Three Mile Island em Middleton, PA, onde ocorreu um acidente nuclear em
1979. O longo braço do robô de controle remoto pode ser visto na frente do veí-
culo (NISE, 2002).
(c) Facilidade de uso da forma de entrada
Sistemas de controle de temperatura.
(d) Compensação de perturbações
Exemplo: antena apontando para direção comandada. Se um vento força a ante-
na a se deslocar de sua posição comandada, o sistema deve ser capaz detectar a
perturbação e corrigir o problema.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
4
1.2. Histórico
Controle de nível de líquidos: 300 a.C. – relógio de água, lampião a óleo.
Controle de pressão de vapor e temperatura: século XVII – válvula de segu-
rança, controle de temperatura para chocar ovos.
Controle de velocidade: século XVIII – moinho de vento, máquinas a vapor.
Estabilidade, estabilização, condução: século XIX – controle de embarca-
ções.
Desenvolvimentos no século XX: projeto no domínio da freqüência (Bode,
Nyquist).
Aplicações contemporâneas: meios de transporte, plantas industriais, ônibus
espaciais, entretenimento, etc.
Importância dos computadores.
1.3. O Engenheiro de Controle e Automação
Percorre inúmeras áreas do conhecimento e inúmeras funções dentro dessas
áreas. Engenheiro de A&C pode ser encontrado no nível mais elevado de
grandes projetos, envolvido na fase conceitual de determinar ou implementar
os requisitos globais do sistema.
Engenheiro de A&C interage com inúmeros ramos da Engenharia e das ciên-
cias. Expansão de horizontes da Engenharia além do currículo universitário.
Vantagem a um estudante (além de se graduar he he...):
o Ênfase no projeto de cima para baixo (top-down)
o Abordagem sistêmica diferentemente dos outros cursos até aqui
o A abordagem de baixo para cima é usada nos cursos anteriores
principalmente por causa do alto nível matemático necessário.
o Este curso esclarecerá os procedimentos de análise e planejamento
e mostrará a você como o conhecimento adquirido se encaixa den-
tro do projeto do sistema.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
5
Figura 4 - a. Reprodutor de disco de vídeo a laser; b. lentes objetivas lendo de-
pressões no disco; c. trajetória óptica para reprodução mostrando o espelho de
rastreamento acionado angularmente por um sistema de controle para manter o
feixe de laser posicionado nas depressões (NISE, 2002).

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
6
1.4. Características de resposta e configuração de sistema
Entrada e saída
Sistema de controle fornece uma saída ou resposta para uma dada entrada ou
estímulo. A entrada representa a resposta desejada, a saída é a resposta real.
Exemplo: botão do quarto andar de um elevador é pressionado do térreo.
Elevador deve subir com uma velocidade e uma precisão de nivelamento
projetados para o conforto do passageiro. Estas características são, respecti-
vamente, a resposta transitória e o erro de estado estacionário.
Figura 5 - Entrada e saída do elevador (NISE, 2002).
Sistema a malha aberta
Figura 6 - Diagrama de blocos dos sistemas de controle: a. sistema a malha aber-
ta (NISE, 2002).

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
7
Transdutor de entrada – converte a forma de entrada na usada pelo controla-
dor.
Controlador – age sobre o processo ou planta.
Característica que distingue sistemas a malha aberta: não pode compensar a
ação de quaisquer perturbações que sejam adicionadas.
Exemplos: torradeira simples; digitação de texto sem se olhar na tela.
Sistema a malha fechada (controle com retroação)
Figura 7 - Diagrama de blocos dos sistemas de controle: b. sistema a malha fe-
chada (NISE, 2002).
Transdutor de entrada: converte forma de onda de entrada na forma usada
pelo controlador.
Transdutor de saída ou sensor: mede a resposta de saída e a converte na
forma usada pelo controlador.
Vantagem: compensa perturbações medindo o sinal de saída. Maior precisão,
menos sensível a ruídos.
Desvantagem: mais complexos e caros.
Exemplos: torradeira “automática” (mede cor do pão); digitação de texto
conferindo-se o resultado na tela.
Exercícios
1. (NISE, 2002, p. 21) Cite três aplicações de sistemas de controle com retroa-
ção.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
8
2. (NISE, 2002, p. 21) Cite três razões para o uso de sistemas de controle com
retroação e pelo menos uma razão para não usá-los.
3. (NISE, 2002, p. 21) Dê três exemplos de sistemas a malha aberta.
4. (NISE, 2002, p. 21) Um resistor variável, chamado potenciômetro, é mostra-
do a seguir:
Figura 8 – Potenciômetro (NISE, 2002).
A resistência é variada pelo movimento de um cursor de contato deslizante ao
longo de uma resistência fixada. A resistência entre A e C é fixa, mas a resistên-
cia entre B e C varia com a posição do cursor. Se forem necessárias 10 voltas
para mover o cursor de contato deslizante de A para C, desenhe um diagrama de
blocos do potenciômetro mostrando a variável de entrada, a variável de saída e
(dentro do bloco) o ganho, que é uma constante e é a quantidade pela qual a en-
trada deve ser multiplicada para se obter a saída.

Automação e Controle I – Aula 1T – Professor Marcio Eisencraft – julho 2006
9
5. (NISE, 2002, p. 24) Resolva a seguinte equação diferencial usando os méto-
dos clássicos. Suponha que as condições iniciais sejam iguais a zero.
txdtdx 2cos57 =+

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
1
Aula 2T - Projeto de um sistema de controle Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 10-26.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 14-24.
1.5. Objetivos de análise e de projeto
Objetivos de análise e de projeto de sistemas:
Produzir resposta transitória desejada;
Reduzir erro de estado estacionário;
Garantir estabilidade;
Minimizar Custo;
Minimizar sensibilidade de desempenho a mudanças nos parâmetros.
Resposta transitória
Muito importante. Exemplos: elevador; em um computador contribui para o
tempo necessário para leitura ou gravação no disco rígido (HD).
Figura 1 - Acionador de disco rígido de computador, mostrando discos e cabeça
de leitura/gravação (NISE, 2002).

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
2
Resposta de estado estacionário
Resposta que permanece depois que a componente transitória se reduz a zero.
Figura 2 - Entrada e saída do elevador (NISE, 2002).
Estabilidade
Resposta total de um sistema é a soma da resposta natural e da resposta for-
çada. Quando você estudou equações diferenciais lineares, provavelmente se
referiu a estas respostas como soluções homogênea e particular, respectiva-
mente.
Resposta total = Resposta natural + Resposta forçada
Para que um sistema de controle seja útil, a resposta natural deve:
o Tender a zero, deixando somente a resposta forçada, ou,
o Oscilar.
Em alguns sistemas, a resposta natural cresce sem limites em vez de diminuir
até zero ou oscilar. Finalmente, a resposta natural é tão maior que a resposta
forçada que o sistema não é mais controlado. Esta condição, chamada insta-
bilidade pode conduzir à autodestruição do dispositivo físico se não houver
batentes limitadores como parte do projeto.

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
3
Outras considerações
Seleção de hardware: dimensionamento do motor para atender os requisitos
de potência e escolha de sensores de acordo com precisão necessária.
Custos: se o projeto for usado para fazer muitas unidades, pequeno acréscimo
no custo unitário pode-se traduzir em muito mais dólares para sua empresa
propor num contrato de licitação.
Robustez: desempenho deve variar pouco com mudança nos parâmetros.
Introdução a um estudo de caso
Uma introdução aos sistemas de posicionamento de uma antena em azimute
Os sistemas de controle de posição encontram aplicações muito difundidas
em antenas, braços robóticos e acionamento de disco rígido de computador.
A antena de radiotelescópio da figura a seguir é um exemplo de sistema que
utiliza controle de posição.
Figura 3 – Antena de radioastronomia.
1.6. Procedimento de projeto
Passo 1: Transformar requisitos em um sistema físico

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
4
Figura 4 - Sistema de controle de posição da antena em azimute: a. conceito do
sistema; b. leiaute detalhado. (NISE, 2002)
Passo 2: Desenhar um diagrama de blocos funcional
Descreve as partes componentes do sistema (isto é, função e/ou hardware) e
mostra suas interconexões.

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
5
Figura 5 - Sistema de controle de posição da antena em azimute: diagrama de
blocos funcional (NISE, 2002).
Passo 3: Criar um diagrama esquemático.
Figura 6 - Sistema de controle de posição da antena em azimute: diagrama es-
quemático (NISE, 2002).
Passo 4: Desenvolver um Modelo Matemático (Diagrama de blocos)
Usar leis físicas para modelar matematicamente o sistema.
Leis mais importantes:
Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
6
o Lei de Kirchhoff das tensões: A soma das tensões ao longo de um
caminho fechado é igual a zero.
o Lei de Kirchhoff das correntes: A soma das correntes elétricas que
fluem por um nó é igual a zero.
o Leis de Newton: A soma das forças aplicadas a um corpo é igual a
zero; a soma dos momentos aplicados a um corpo é igual a zero.
Descrições possíveis:
o Equação diferencial
o Função de transferência (Transformada de Laplace)
o Espaço de estados
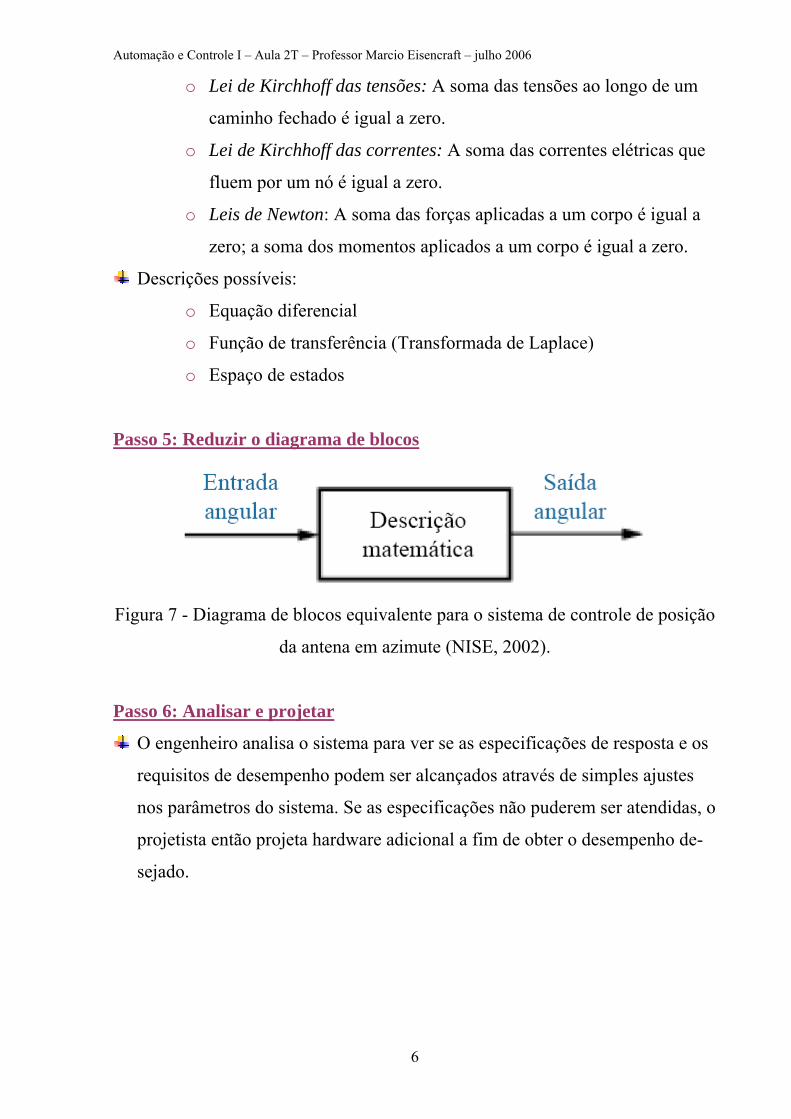
Passo 5: Reduzir o diagrama de blocos
Figura 7 - Diagrama de blocos equivalente para o sistema de controle de posição
da antena em azimute (NISE, 2002).
Passo 6: Analisar e projetar
O engenheiro analisa o sistema para ver se as especificações de resposta e os
requisitos de desempenho podem ser alcançados através de simples ajustes
nos parâmetros do sistema. Se as especificações não puderem ser atendidas, o
projetista então projeta hardware adicional a fim de obter o desempenho de-
sejado.

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
7
Figura 8 - Resposta de um sistema de controle de posição mostrando o efeito de
valores grande e pequeno para o ganho do controlador na resposta de saída (NI-
SE, 2002).

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
8
Entradas utilizadas:
Tabela 1 - Formas de onda de teste usadas em sistemas de controle (NISE,
2002).
1.7. Projeto de assistido por computador (CAD)
Computador tem importante papel no projeto de sistemas de controle moder-
nos.
Com a capacidade de simular um projeto rapidamente, pode-se facilmente
fazer mudanças e imediatamente testar um novo projeto.

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
9
Matlab
Parte integrante do projeto de sistemas de controle moderno.
Sumário
A metodologia do projeto de sistemas de controle foi apresentada. A partir da
próxima aula, aprenderemos como usar o esquema para obter um modelo ma-
temático.
Exercícios
1. (NISE, 2002; p. 21) Um sistema de controle de temperatura opera sentindo a
diferença entre o ajuste do termostato e a temperatura real e em seguida a-
brindo uma válvula de combustível de uma quantidade proporcional a esta
diferença. Desenhe um diagrama de blocos funcional a malha fechada seme-
lhante ao da Figura 5, identificando os transdutores de entrada e de saída, o
controlador e a planta. Além disso, identifique os sinais de entrada e saída
para todos os subsistemas descritos anteriormente.
2. (NISE, 2002; p. 21) A altitude de uma aeronave varia em rolamento, arfagem
e guinada conforme definido na figura a seguir. Desenhe um diagrama de
blocos funcional para um sistema de malha fechada que estabilize o rolamen-
to como a seguir: o sistema mede o ângulo de rolamento real com um dispo-
sitivo giroscópico e compara o ângulo de rolamento real com o ângulo de ro-
lamento desejado. Os ailerons respondem ao erro de ângulo de rolamento
efetuando uma deflexão angular. A aeronave responde a esta deflexão angu-
lar produzindo uma velocidade angular de rolamento. Identifique os transdu-
tores de entrada e de saída, o controlador e a planta. Além disso, identifique a
natureza de cada sinal.

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
10
Figura 9 - Definição de atitude da aeronave (NISE, 2002).
3. (NISE, 2002; p. 24) Dado o circuito elétrico da figura a seguir:
Figura 9 – Rede RL (NISE, 2002).
(a) Escreva a equação diferencial para o circuito se ( ) ( )tutv = , um degrau unitá-
rio.
(b) Resolva a equação diferencial para a corrente ( )ti , se não há energia inicial
no circuito.
(c) Faça um gráfico da solução se 1=LR .
4. (NISE, 2002; p. 24) Repita o problema 3 para o circuito elétrico mostrado na
Figura a seguir. Suponha 1=R Ω, 5,0=L H e 301=
LC.

Automação e Controle I – Aula 2T – Professor Marcio Eisencraft – julho 2006
11
Figura 10 - Circuito RLC (NISE, 2002).
5. (NISE, 2002; p. 24) Resolva a seguinte equação diferencial usando os méto-
dos clássicos. Suponha que as condições iniciais sejam iguais a zero.
( )tuxdtdx
dtxd 10258
2
=++

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
1
Aula 3T - Revisão sobre transformada de Laplace Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 28-36.
LATHI, Bhagwandas Pannalal. Signal processing and linear systems. California: Berkeley, c1998. 734 p.
ISBN 0941413357. Páginas 361-394.
CAPÍTULO 2 – Modelagem no domínio da freqüência
Objetivos do capítulo
Rever a transformada de Laplace;
Função de transferência
Próximo passo no curso: desenvolver modelos a partir de diagramas de sis-
temas físicos.
Dois métodos: (1) funções de transferência no domínio da freqüência e (2)
equações de estado no domínio do tempo.
Queremos encontrar o que colocar dentro das caixas marcadas “sistema” e
“subsistema” na figura a seguir.
Figura 1 - a. Representação em diagrama de blocos de um sistema; b. represen-
tação em diagrama de blocos de uma interconexão de subsistemas (NISE, 2002).

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
2
2.1. Revisão sobre Transformadas de Laplace
Definição:
( )[ ] ( ) ( )
0
stf t F s f t e dt−
∞−= = ∫L
em que s é uma variável complexa. ( )sF é chamada de transformada de Lapla-
ce de ( )tf .
A Tabela 2.1 mostra alguns exemplos de transformadas obtidas a partir da
definição. A Tabela 2.2 mostra uma série de propriedades bastante importan-
tes.
Exercícios
1. (NISE, 2002; p. 29) Obter a transformada de Laplace de ( ) ( )tuAetf at−= .
2. (NISE, 2002; p. 30) Obter a transformada de Laplace inversa de:
( )( )21 3
1+
=s
sF .
Ou seja, encontre ( )tf1 cuja transformada de Laplace seja ( )sF1 .
Expansão em frações parciais
Para obter a transformada inversa de uma função complicada, podemos con-
verter a função em uma soma de parcelas mais simples para cada uma das
quais se conhece a transformada de Laplace.
O resultado é chamado de expansão em frações parciais.
Caso 1: Raízes do denominador de ( )sF reais e distintas
Por exemplo,
( ) ( )( )212++
=ss
sF .

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
3
Tabela 2.1 – Principais transformadas de Laplace (LATHI, 1998).

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
4
Tabela 2.2 – Propriedades da Transformada de Laplace (LATHI, 1998).

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
5
Neste caso, o denominador tem duas raízes reais e distintas (-1 e -2). Para
obtermos a transformada inversa, o procedimento é o seguinte:
Decompomos ( )sF numa soma de frações com tantas parcelas quantas forem
as raízes do denominador:
( ) ( )( ) 21212 21
++
+=
++=
sK
sK
sssF .
As constantes 1K e 2K são usualmente chamas de resíduos. Para obter 1K , subs-
titui-se a raiz correspondente ( 1−=s ) em ( )sF sem o termo ( )1+s . Assim,
( ) 212
22
11 ==
+=
−=ssK .
De forma análoga,
( ) 21
21
2
22 −=
−=
+=
−=ssK .
Assim,
( )2
21
2+−
++
=ss
sF .
Agora, usando a linha (5) da Tabela 2.1 e a linearidade,
( ) ( ) ( )tueetf tt 222 −− −= ou
( ) ( ) 0,22 2 ≥−= −− teetf tt.
Observação: na aplicação deste processo, caso o grau do numerador seja
maior ou igual ao do denominador, é necessário efetuar a divisão primeiro.
Exercício
3. (NISE, 2002; p. 32) Dada a seguinte equação diferencial, obter a solução ( )ty
se todas as condições iniciais forem zero. Usar a transformada de Laplace.
( )tuydtdy
dtyd 3232122
2
=++ .

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
6
Caso 2: Raízes do denominador de ( )sF reais e repetidas
Neste caso, deve-se lembrar que, no caso de raízes reais, o número de parce-
las distintas na expansão é sempre igual ao grau do denominador. Assim, ca-
da raiz múltipla gera termos adicionais com fatores no denominador de mul-
tiplicidade reduzida.
Por exemplo, se:
( )( )( )
,21
22++
=ss
sF
as raízes são -1, -2 e -2 (diz-se que -2 tem multiplicidade 2). A expansão em fra-
ções é:
( )( ) 221
32
21
++
++
+=
sK
sK
sKsF .
Os resíduos 1K e 2K podem ser obtidos como anteriormente. Assim,
( )2
22
121 =
+=
−=ssK e ( ) 2
12
22 −=
+=
−=ssK .
Já 3K pode ser obtido substituindo-se s por um valor conveniente. Por exemplo,
substituindo-se 0=s em:
( )( ) ( ) 222
12
212 3
22 ++
+−
+=
++ sK
ssss ,
obtém-se:
222
1242
33 −=⇒+−= KK
e assim,
( )( ) 2
222
12
2 +−
++−
++
=sss
sF .
Usando as linhas (5) e (6) da Tabela 2.1,
( ) 0,222 22 ≥−−= −−− teteetf ttt.

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
7
Caso 3: Raízes do denominador de ( )sF complexas
Exemplo:
( ) ( )523
2 ++=
ssssF .
Neste caso, não é possível fazer a expansão em parcelas de 1º grau. Esta ex-
pressão deve ser expandida da seguinte forma:
( )522
321
+++
+=ssKsK
sK
sF .
O resíduo 1K pode ser obtido como anteriormente:
53
523
021 =
++=
=sssK .
2K e 3K podem ser obtidos por substituição conveniente de valores de s em:
( ) 5253
523
232
2 +++
+=++ ss
KsKssss .
Para 1=s ,
853
83 32 KK +
+= e
para 1−=s ,
453
43 23 KK −
+−=− .
Resolvendo o sistema, obtém-se:
53
2 −=K e 56
3 −=K .
Assim,

Automação e Controle I – Aula 3T – Professor Marcio Eisencraft – julho 2006
8
( ) ( )( )
( ) ( )( ) ( ) 41
2103
411
531
53
412
535
3
5256
53
53
22
22
++−
+++
−=
⇒++
+−=
++
−−+=
sss
ssF
ss
sss
s
ssF
.
Utilizando-se então as linhas (2), (9a) e (9b) da Tabela 2.1 chega-se a:
( ) ( ) ⎟⎠⎞
⎜⎝⎛ +−= − ttetutf t 2sin
212cos
53
53
.
Exercícios
4. (NISE, 2002; p. 35) Obter a transformada de Laplace de ( ) ttetf 5−= .
5. (NISE, 2002; p. 36) Obter a transformada de Laplace inversa de:
( )( )( )232
10++
=sss
sF .

Automação e Controle I – Aula 4T – Professor Marcio Eisencraft – julho 2006
1
Aula 4T – Função de transferência Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 36-38.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 37-48.
2.2 Função de transferência
Vamos empregar na aula de hoje os conceitos relacionados à Transformada
de Laplace para simplificar a representação de sistemas dinâmicos.
Um sistema pode ser representado pela equação diferencial genérica:
( ) ( ) ( ) ( ) ( ) ( )trbdt
trdbdt
trdbtcadt
tcdadt
tcda m
m
mm
m
mn
n
nn
n
n 01
1
101
1
1 +++=+++ −
−
−−
−
− ……
em que ( )tc é a saída, ( )tr é a entrada e os ia , os ib e a forma da equação dife-
rencial representa o sistema. Aplicando a Transformada de Laplace a ambos os
lados da equação e supondo condições iniciais nulas:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )sRbsbsbsCasasa
sRbsRsbsRsbsCasCsasCsam
mm
mn
nn
n
mm
mm
nn
nn
01
101
1
01
101
1
+++=+++
⇒+++=+++−
−−
−
−−
−−
…………
A partir da expressão acima, chegamos a:
( )( ) ( )
01
1
01
1
asasabsbsb
sGsRsC
nn
mn
mm
mm
++++++
=≡ −−
−−
……
.
Esta expressão:
( ) ( )( )sRsCsG =
é chamada de função de transferência do sistema. Relaciona, de forma algébri-
ca, a entrada e a saída de um sistema. Dado ( )sG e a transformada da entrada
( )sR podemos calcular a saída:
( ) ( ) ( )sRsGsC = .
A função de transferência é representada pelo diagrama de blocos a seguir:

Automação e Controle I – Aula 4T – Professor Marcio Eisencraft – julho 2006
2
Figura 1 - Diagrama de Blocos de uma Função de Transferência (NISE, 2002).
Nas próximas aulas, aprenderemos a representar, através de funções de trans-
ferência, circuitos elétricos, sistemas mecânicos de translação, sistemas me-
cânicos em rotação e sistemas eletromecânicos.
Exercícios
1. (NISE, 2002; p. 37) Obter a função de transferência representada por:
( ) ( ) ( )trtcdt
tdc=+ 2 .
2. (NISE, 2002; p. 37) Usar o resultado do Exercício 1 para obter a resposta ( )tc
a uma entrada ( ) ( )tutr = a um degrau unitário supondo condições iniciais i-
guais a zero.
3. (NISE, 2002; p. 37) Obter a função de transferência,
( ) ( )( )sRsCsG = ,
correspondente à equação diferencial
rdtdr
dtrdc
dtdc
dtcd
dtcd 34573 2
2
2
2
3
3
++=+++
4. (NISE, 2002; p. 38) Obter a equação diferencial correspondente à função de
transferência:
( )26
122 ++
+=
ssssG .

Automação e Controle I – Aula 4T – Professor Marcio Eisencraft – julho 2006
3
5. (NISE, 2002; p. 38) Obter a resposta a uma rampa de um sistema cuja função
de transferência é:
( ) ( )( )84 ++=
ssssG .

Automação e Controle I – Aula 5T – Professor Marcio Eisencraft – julho 2006
1
Aula 5T – Modelagem de circuitos elétricos (1ª parte) Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 38-48.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 25-92.
2.3 Função de transferência de circuitos elétricos
Componentes passivos (ver Tabela 1).
Princípios-guias: Leis de Kirchhoff: somando tensões ao longo de malhas ou
correntes em nós o resultado é zero.
Circuitos simples via método das malhas
I. Redesenhe o circuito original mostrando todas as variáveis no domínio do
tempo, como ( )tv , ( )ti e ( )tvC como transformadas de Laplace ( )sV , ( )sI e
( )sVC respectivamente.
II. Substitua os valores de componentes por seus valores de impedância.
III. Some as tensões ao longo da malha e use a lei de Kirchhoff das tensões.
Exercício
1. (NISE, 2002; p. 39) Obter a função de transferência relacionando a tensão
( )sVC no capacitor à tensão de entrada ( )sV na Figura a seguir.
Figura 1 – Circuito RLC (NISE, 2002).

Automação e Controle I – Aula 5T – Professor Marcio Eisencraft – julho 2006
2
Tabela 1 – Elementos passivos de circuitos elétricos (NISE, 2002).

Automação e Controle I – Aula 5T – Professor Marcio Eisencraft – julho 2006
3
Circuito simples via Método dos nós
As funções de transferência também podem ser obtidas usando a lei de Kirc-
hhoff das correntes e somando as correntes que fluem nos nós. Chamamos
este método de método dos nós.
Exercício
2. (NISE, 2002; p. 41) Repetir o Exercício 1 usando o método dos nós sem es-
crever a equação diferencial.
Circuito simples via divisão de tensão
O Exercício 1 pode ser resolvido diretamente usando divisão de tensão no
circuito transformado.
Exercício
3. (NISE, 2002; p. 41) Repetir o Exercício 1 usando divisão de tensão e o cir-
cuito transformado.
Circuitos mais complicados via Método das Malhas
I. Substituir todos os valores dos elementos passivos por sua impedância.
II. Substituir todas as fontes e todas as variáveis no domínio do tempo pelas
respectivas transformadas de Laplace.
III. Arbitrar um sentido para a corrente do circuito transformado em cada malha.
IV. Escrever a lei de Kirchhoff das tensões ao longo de cada malha.
V. Resolver o sistema de equações em termos da saída.
VI. Elaborar a função de transferência.
Exercício
4. (NISE, 2002; p. 42) Dado o circuito da figura a seguir, obter a função de
transferência ( )( )sVsI 2 .

Automação e Controle I – Aula 5T – Professor Marcio Eisencraft – julho 2006
4
Figura 2 – Circuito elétrico com duas malhas (NISE, 2002).
Circuitos mais complicados via Método dos Nós
Usa-se a Lei de Kirchhoff das correntes e somam-se as correntes que deixam
cada nó.
Exercício
5. (NISE, 2002; p. 44) Obter a função de transferência ( )( )sV
sVC para o circuito da
Figura 2. Usar o método dos nós.
Uma técnica para solução de problemas
Os mesmos procedimentos podem ser usados em circuitos elétricos com mais
malhas.
Exercício
6. (NISE, 2002; p. 45) Escrever, mas não resolver, as equações de malha do cir-
cuito mostrado na Figura a seguir.

Automação e Controle I – Aula 5T – Professor Marcio Eisencraft – julho 2006
5
Figura 3 – Circuito elétrico com três malhas (NISE, 2002).

Automação e Controle I – Aula 6T – Professor Marcio Eisencraft – julho 2006
1
Aula 6T – Modelagem de circuitos elétricos (2ª parte) Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 48-50.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 23-92.
Exercícios
1. (NISE, 2002, p.82) Obter a função de transferência ( ) ( )( )sVsV
sGi
O= para o cir-
cuito mostrado a seguir.
Figura 1 – Circuito do Exercício 1 (NISE, 2002).
2. (NISE, 2002; p. 50) Obter a função de transferência ( ) ( )( )sVsV
sG L= no circuito a
seguir. Solucionar o problema de duas formas: pelo método das malhas e pe-
lo método dos nós. Mostrar que os dois métodos conduzem ao mesmo resul-
tado.
Figura 2 - Circuito elétrico para o Exercício 2. (NISE, 2002).

Automação e Controle I – Aula 7T – Professor Marcio Eisencraft – julho 2006
1
Aula 7T – Modelagem de sistemas mecânicos em translação Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 50-56.
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo: Prentice-Hall do Brasil, 2003.
788 p. ISBN 8587918230 Páginas 71-74.
2.4 Função de transferência de sistemas mecânicos em translação
Sistemas mecânicos se assemelham muito com circuitos elétricos: existem
analogias entre componentes e variáveis elétricos e mecânicos.
Sistemas mecânicos possuem três componentes passivos lineares. Dois deles,
a mola e a massa são elementos armazenadores de energia; um deles, o a-
mortecedor viscoso, dissipa energia.
A Tabela 1 mostra os elementos utilizados num sistema mecânico e suas re-
lações força-deslocamento e força-velocidade. A Tabela 2, já apresentada,
mostra os elementos elétricos para comparação.
Tabela 1 – Componentes de sistemas mecânicos (NISE, 2002).
Tabela 2 – Componentes de sistemas elétricos (NISE, 2002).

Automação e Controle I – Aula 7T – Professor Marcio Eisencraft – julho 2006
2
Na Tabela 1, K , Vf e M são chamados, respectivamente de constante de mo-
la, coeficiente de atrito viscoso e massa.
Comparando as tabelas, percebe-se a seguinte analogia:
Sistema elétrico Sistema mecânico de translação
Tensão ( )tv Força ( )tf
Corrente elétrica ( )ti Velocidade ( )tv
Carga ( )tq Deslocamento ( )tx
Resistência R Amortecimento viscoso Vf
Indutância L Massa M
Capacitância C Constante de mola K
Para obtermos funções de transferência em sistemas mecânicos, desenha-se
um diagrama de corpo livre para cada massa presente no sistema posicionan-
do nela todas as forças que agem sobre ela no sentido do movimento ou no
sentido oposto. Em seguida, utilizamos a lei de Newton para construir a e-
quação diferencial do movimento somando as forças e igualando a zero.
Finalmente, supondo condições iniciais nulas, aplicamos a transformada de
Laplace à equação diferencial, separamos as variáveis e chegamos à função
de transferência desejada.

Automação e Controle I – Aula 7T – Professor Marcio Eisencraft – julho 2006
3
Quando mais de um deslocamento estiver presente, desenhamos o diagrama
de corpo livre para cada um dos corpos e, em seguida, usamos a superposi-
ção. Para cada um dos diagramas de corpo livre, começamos fixando todos
os outros corpos e determinamos as forças que atuam sobre o corpo devido
somente ao próprio movimento. Em seguida, mantemos o corpo parado e ati-
vamos, um a um, os outros corpos, colocando no corpo original as forças cri-
adas pelo movimento adjacente.
Exercícios
1. (NISE, 2002, p. 51) Obter a função de transferência, ( ) ( )sFsX para o sistema
da Figura 1.
Figura 1 - Sistema massa, mola e amortecedor (NISE, 2002).
2. (NISE, 2002, p. 83) Obter a função de transferência ( ) ( ) ( )sFsXsG 1= para o
sistema mecânico mostrado na Figura 2.
Figura 2 – Sistema do Exercício 2 (NISE, 2002).

Automação e Controle I – Aula 7T – Professor Marcio Eisencraft – julho 2006
4
3. (NISE, 2002; p. 53) Obter a função de transferência ( ) ( )sFsX 2 para o siste-
ma da Figura 3.
Figura 3 - Sistema mecânico com dois graus de liberdade (NISE, 2002).
4. (NISE, 2002, p. 56) Obter a função de transferência ( ) ( ) ( )sFsXsG 2= para o
sistema mecânico em translação mostrado na Figura 4.
Figura 4 – Sistema mecânico em translação do Exercício 4 (NISE, 2002).
5. (NISE, 2002, p. 55) Escrever, mas não resolver, as equações de movimento
da estrutura mecânica da Figura 5.
Figura 5 – Sistema mecânico com três graus de liberdade (NISE, 2002).

Automação e Controle I – Aula 8T – Professor Marcio Eisencraft – julho 2006
1
Aula 8T – Modelagem de sistemas mecânicos em rotação Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p.
ISBN 8521613016. Páginas 56-60.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 23-92.
2.5 Função de transferência de sistemas mecânicos em rotação
Os sistemas mecânicos em movimento de rotação são manipulados da
mesma forma que os sistemas mecânicos em translação, exceto que o
torque substitui força e deslocamento angular substitui deslocamento de
translação.
Os componentes mecânicos dos sistemas em rotação são os mesmos dos
sistemas em translação. Veja a Tabela 1 a seguir.
Tabela 1 - Relações para sistemas mecânicos em rotação. (NISE, 2002).

Automação e Controle I – Aula 8T – Professor Marcio Eisencraft – julho 2006
2
O termo associado a massa foi substituído por inércia. Os valores de K ,
D e J são chamados constante de mola, coeficiente de atrito viscoso e
momento de inércia, respectivamente.
Escrever as equações de movimento para sistemas em rotação é seme-
lhante a escrevê-las para os sistemas em translação. Obtemos os torques
por superposição.
Primeiro giramos um corpo mantendo parados todos os demais e pondo
no diagrama de corpo livre todos os torques devido ao próprio movi-
mento. Em seguida, mantendo o corpo parado, giramos os pontos adja-
centes, um a um, e acrescentamos os torques devidos ao movimento ad-
jacente ao corpo livre. O processo é repetido para cada um dos pontos
em movimento.
Exercício
1. (NISE, 2002, p. 57) Obter a função de transferência ( ) ( )sTs2Θ para o
sistema em rotação mostrado na Figura 1a a seguir. O eixo elástico é
suspenso por meio de mancais em cada uma das extremidades e é sub-
metido a torção. Um torque é aplicado à esquerda e o deslocamento an-
gular é medido à direita. O esquema equivalente deste sistema físico é
mostrado na Figura 1b.
Figura 1 a. Sistema físico; b. esquema (NISE, 2002).

Automação e Controle I – Aula 8T – Professor Marcio Eisencraft – julho 2006
3
2. (NISE, 2002, p. 60) Obter a função de transferência ( ) ( ) ( )sTssG 2Θ=
para o sistema em rotação mostrado na Figura 2.
Figura 2 - Sistema em rotação para o Exercício 2 (NISE, 2002).
3. (NISE, 2002, p. 59) Escrever, mas não resolver, a transformada de La-
place das equações de movimento para o sistema mostrado na Figura 3.
Figura 3 - Sistema em rotação com três graus de liberdade (NISE, 2002).
4. (NISE, 2002, p. 84) Para cada um dos sistemas mecânicos em rotação
mostrados na Figura 4, escreva, mas não resolva as equações de movi-
mento.
Figura 4 – (NISE, 2002).

Automação e Controle I – Aula 9T – Professor Marcio Eisencraft – julho 2006
1
Aula 9T – Modelagem de sistemas com engrenagens Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 60-64.
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo: Prentice-Hall do Brasil, 2003.
788 p. ISBN 8587918230. Páginas 71-74.
2.6 Funções de transferência de sistemas com engrenagens
Sistemas em rotação raramente são vistos sem trens de engrenagens acionan-
do a carga. É necessário estudar como modelá-los.
A interação entre duas engrenagens é mostrada a seguir.
Figura 1 – Sistema de engrenagens (NISE, 2002).
À medida que as engrenagens giram, a distância percorrida ao longo de cada
circunferência das engrenagens é a mesma. Portanto,
2211 θθ rr = ou
2
1
2
1
1
2
NN
rr==
θθ
.
A relação entre os deslocamentos angulares das engrenagens é inversamente
proporcional à razão do número de dentes.

Automação e Controle I – Aula 9T – Professor Marcio Eisencraft – julho 2006
2
Como não há perdas, a energia fornecida à primeira engrenagem é a mesma
obtida na segunda. Assim,
2211 θθ TT = ou
1
2
2
1
1
2
NN
TT
==θθ
.
Os torques são diretamente proporcionais à relação do número de dentes. Es-
tes resultados são resumidos a seguir:
Figura 2 - Funções de transferência a. entre deslocamentos angulares de engre-
nagens sem perdas e b. entre torques de engrenagens sem perdas (NISE, 2002).
Vejamos o que acontece com as impedâncias mecânicas acopladas às engre-
nagens. A Figura 3 mostra engrenagens acionando uma inércia, uma mola e
um amortecedor viscoso. Para maior clareza, as engrenagens são mostradas
por meio de uma vista em corte simplificada.
Figura 3 - Sistema em rotação acionado por engrenagens (NISE, 2002).
Deseja-se representar esta figura como um sistema equivalente referido a 1θ
sem engrenagens.

Automação e Controle I – Aula 9T – Professor Marcio Eisencraft – julho 2006
3
É possível refletir 1T na saída multiplicando-o por 1
2
NN . O resultado está mos-
trado na Figura 4, a partir do qual se escreve a equação do movimento como:
Figura 4 – Sistema referido à saída após reflexão do torque (NISE, 2002).
( ) ( ) ( )1
212
2
NN
sTsKDsJs =Θ++ .
Como 12
12 θθ
NN
= , temos:
( ) ( ) ( )
( ) ( )sTsNNKs
NNDs
NNJ
NNsTs
NNKDsJs
11
2
2
1
2
2
122
2
1
1
211
2
12
=Θ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛⇒
⇒=Θ++
.
Este sistema equivalente é mostrado na Figura 5.
Figura 5 - Sistema referido à entrada após reflexão das impedâncias (NISE,
2002).
Generalizando os resultados, podemos elaborar o seguinte enunciado: As im-
pedâncias mecânicas em rotação podem ser refletidas por meio de trens de
engrenagens multiplicando-se a impedância mecânica pela relação:

Automação e Controle I – Aula 9T – Professor Marcio Eisencraft – julho 2006
4
2
origem de eixo do engrenagem da dentes de Número
destino de eixo do engrenagem da dentes de Número
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
.
Exercícios
1. (NISE, 2002, p. 62) Obter a função de transferência ( )( )sT
s
1
2Θ para o sistema da
Figura 6 a seguir.
Figura 6 – Sistema mecânico em rotação com engrenagens (NISE, 2002).
2. (NISE, 2002, p. 64) Obter a função de transferência ( ) ( )( )sT
ssG 2Θ= para o sis-
tema mecânico em rotação com engrenagens mostrado na Figura 7.
Figura 7 - Sistema mecânico do Exercício 2 (NISE, 2002).
Usa-se um trem de engrenagens para implementar valores elevados de rota-
ção de transmissão. O diagrama esquemático de um trem de engrenagens é
mostrado na Figura 8.

Automação e Controle I – Aula 9T – Professor Marcio Eisencraft – julho 2006
5
Figura 8 - Trem de engrenagens (NISE, 2002).
Concluímos que nos trens de engrenagens a relação de engrenagens equiva-
lente é o produto das relações de engrenagens individuais.
Exercícios
3. (NISE, 2002, p. 63) Obter a função de transferência ( )( )sTs
1
1Θ para o sistema da
Figura 9.
Figura 9 - Sistema usando um trem de engrenagens (NISE, 2002).
4. (NISE, 2002, p. 84) Para o sistema mecânico em rotação com engrenagens da
Figura 10, calcule a função de transferência ( ) ( )( )sT
ssG 3Θ= . As engrenagens
possuem inércia e atrito, como mostrado.
Automação e Controle I – Aula 9T – Professor Marcio Eisencraft – julho 2006
6
Figura 10 – (NISE, 2002).
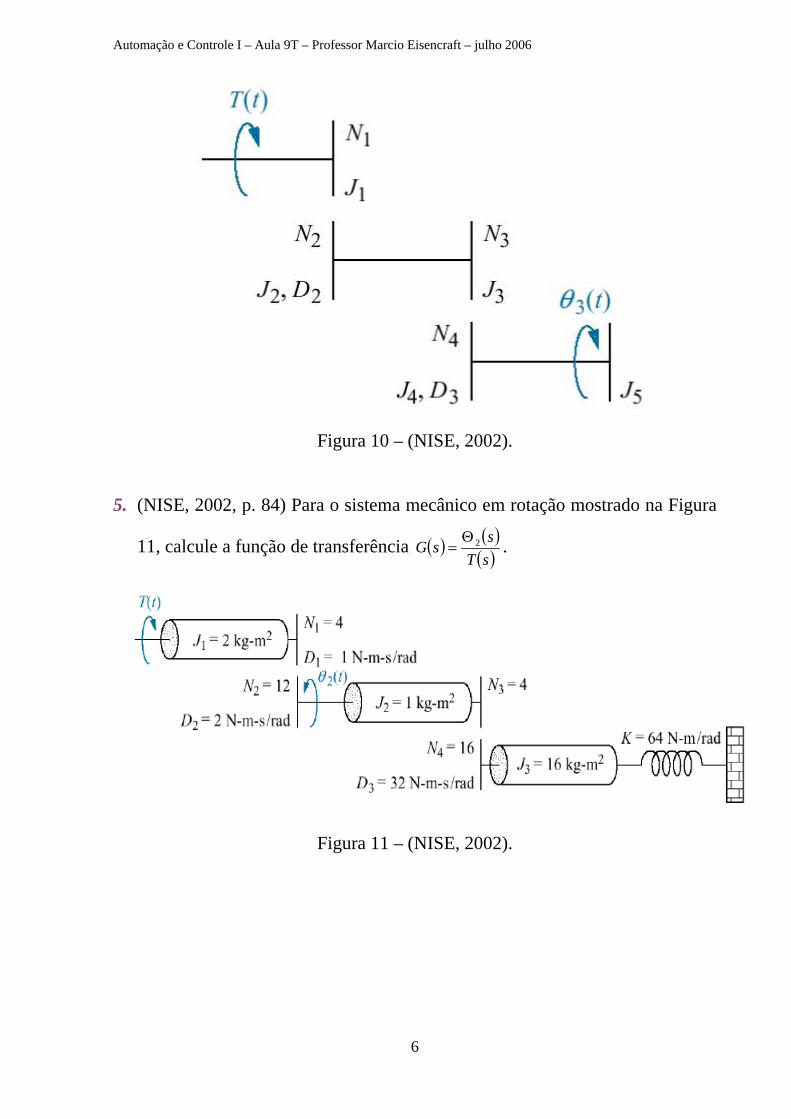
5. (NISE, 2002, p. 84) Para o sistema mecânico em rotação mostrado na Figura
11, calcule a função de transferência ( ) ( )( )sT
ssG 2Θ= .
Figura 11 – (NISE, 2002).
Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
1
Aula 11T – Modelagem de sistemas eletromecânicos Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 64-69.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo ; Rio de
Janeiro: Makron, c1997. 558 p. ISBN 8534605963. Páginas 43-48.
2.7 Funções de transferência de sistema eletromecânico
Vamos nos deslocar agora para sistemas em que há mistura de variáveis elé-
tricas e mecânicas, os sistemas eletromecânicos.
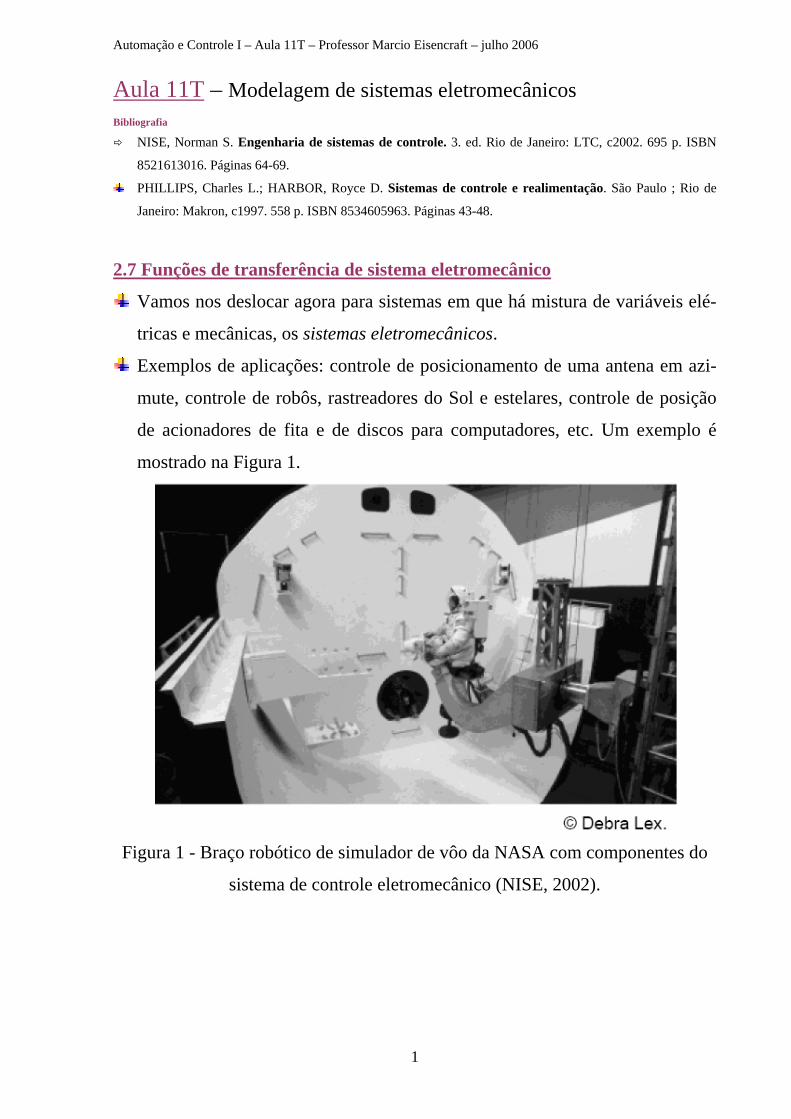
Exemplos de aplicações: controle de posicionamento de uma antena em azi-
mute, controle de robôs, rastreadores do Sol e estelares, controle de posição
de acionadores de fita e de discos para computadores, etc. Um exemplo é
mostrado na Figura 1.
Figura 1 - Braço robótico de simulador de vôo da NASA com componentes do
sistema de controle eletromecânico (NISE, 2002).

Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
2
Um motor é um componente eletromecânico que fornece um deslocamento
de saída para uma tensão de entrada, isto é, uma saída mecânica gerada por
uma entrada elétrica.
Aqui, consideraremos apenas o servo motor de corrente contínua controlado
pela armadura mostrado na Figura 2.
Figura 2 - Motor CC: a. esquema; b. diagrama de blocos. (NISE, 2002).
As equações físicas que regem o comportamento deste sistema são:
aiBF = (1)
ai = corrente elétrica circulando pelo condutor
= comprimento do condutor
B = campo magnético em que o condutor está imerso
vBe = (2)
v = velocidade do condutor
= comprimento do condutor
e = tensão contra-eletromotriz
Assim, ao aplicarmos a tensão ( )tea , aparece um torque ( )tTm e uma velocida-
de angular ( ) ( )tt θω = e, em compensação uma tensão contra-eletromotriz
( )tvb .

Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
3
Baseando-se na Eq. (2), podemos escrever que:
( ) ( ) ( )ssKsVdt
dKtv mbb
mbb Θ=⇒=
θ (3)
Escrevendo a equação da malha para o circuito da armadura,
( ) ( ) ( ) ( )sEsVssILsIR abaaaa =++ .
Em motores de corrente contínua, pode-se considerar que 0≈aL . Assim,
( ) ( ) ( )sEsVsIR abaa =+ . (4)
Da Eq. (1), vemos que o torque produzido pelo motor é proporcional à cor-
rente de armadura, assim,
( ) ( ) ( ) ( )sTK
sIsIKsT mT
aaTm1
=⇒= . (5)
Substituindo (3) e (5) em (4),
( ) ( ) ( )sEssKsTKR
ambmT
a =Θ+ . (6)
Para deduzir a função de transferência ( )( )sEs
a
mΘ , precisamos agora relacionar
( )sTm com ( )smΘ . Isto pode ser feito utilizando-se o modelo da Figura 3 para
o motor carregado. Nesta, aJ e aD são respectivamente a inércia e o amorte-
cimento da armadura e LJ e LD a inércia e o amortecimento da carga (load).
Figura 3 - Motor acionando uma carga mecânica em rotação. (NISE, 2002).

Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
4
Daí,
( ) ( ) ( )ssDsJsT mmmm Θ+= 2 (7)
com 2
2
1⎟⎟⎠
⎞⎜⎜⎝
⎛+=
NN
JJJ Lam e 2
2
1⎟⎟⎠
⎞⎜⎜⎝
⎛+=
NNDDD Lam .
Substituindo agora a Eq. (7) na Eq. (6),
( ) ( ) ( )⇒=Θ⎥⎦
⎤⎢⎣
⎡++ sEssKDsJ
KR
ambmmT
a
( )( )
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++
=Θ
ba
Tm
m
ma
T
a
m
KRKD
Jss
JRK
sEs
1
1
.
Pode-se mostrar que as constantes do motor a
T
RK e bK podem ser obtidas a
partir das curvas torque-velocidade do motor, como as mostradas na Figura
4.
Figura 4 - Curvas de torque-velocidade tendo como parâmetro a tensão de arma-
dura ae (NISE, 2002).

Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
5
Pode-se mostrar que:
a
bloq
a
T
eT
RK
= e
vazio
ab
eKω
=.
Exercícios
1. (NISE, 2002, p. 68) Dado o sistema e a curva torque-velocidade das Figuras
5(a) e (b), obter a função de transferência ( )( )sEs
a
LΘ .
Figura 5 - a. Motor CC e carga; b. curva torque-velocidade. (NISE, 2002).
2. (NISE, 2002, p. 69) Obter a função de transferência ( ) ( )( )sEssG
a
LΘ= de um mo-
tor e carga mostrados na Figura 6. A curva torque-velocidade é dada por
2008 +−= mmT ω quando a tensão de entrada for 100 volts.
Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
6
Figura 6 - Sistema eletromecânico para o Exercício 2 (NISE, 2002).
3. (NISE, 2002, p. 85) Para o motor, a carga e uma curva torque velocidade
mostrados na Figura 7, obter a função de transferência ( ) ( )( )sEssG
a
LΘ= .
Figura 7 – (NISE, 2002).
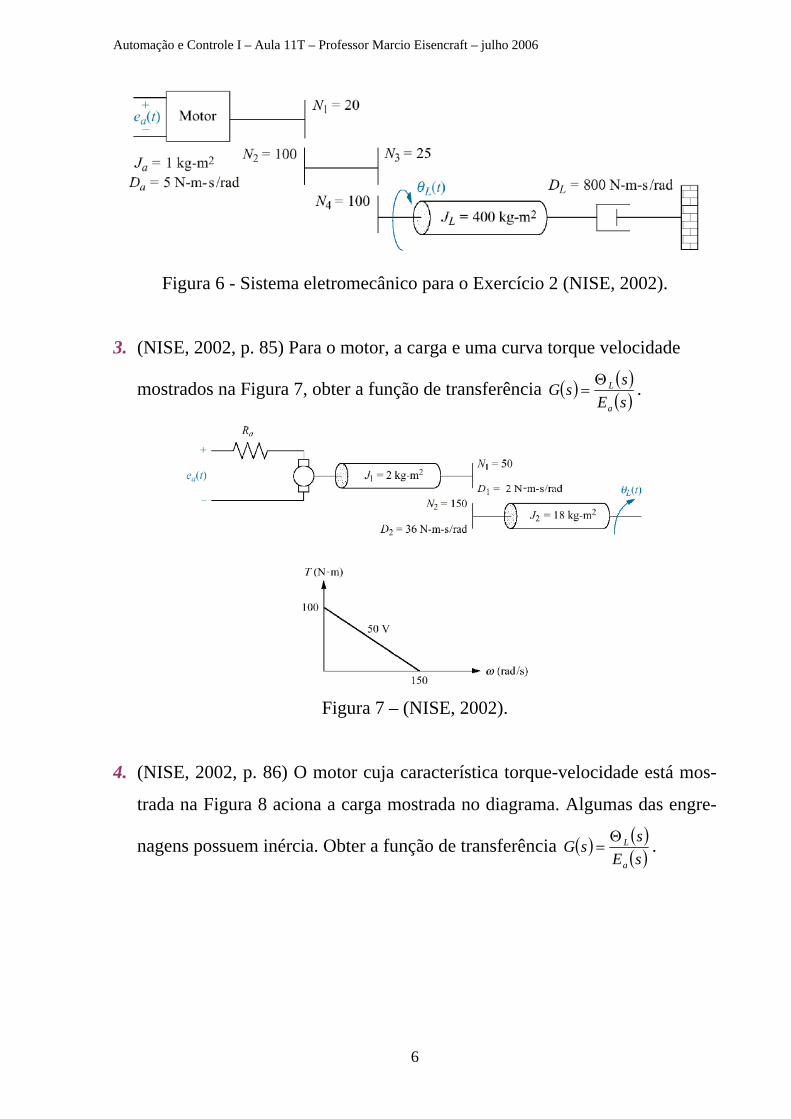
4. (NISE, 2002, p. 86) O motor cuja característica torque-velocidade está mos-
trada na Figura 8 aciona a carga mostrada no diagrama. Algumas das engre-
nagens possuem inércia. Obter a função de transferência ( ) ( )( )sEssG
a
LΘ= .

Automação e Controle I – Aula 11T – Professor Marcio Eisencraft – julho 2006
7
Figura 8 – (NISE, 2002).
5. (NISE, 2002, p. 86) Nesta aula, deduzimos a função de transferência de um
motor CC relacionando o deslocamento angular de saída com a tensão de ar-
madura como entrada frequentemente se deseja controlar o torque em vez do
deslocamento angular. Deduza a função de transferência do motor que rela-
ciona o torque de saída com a tensão de armadura na entrada.

Automação e Controle I – Aula 12T – Professor Marcio Eisencraft – julho 2006
1
Aula 12T – Estudos de casos: Modelos de sistemas Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 78-88.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 76-92.
2.8 Estudos de caso
Controle de antena: Função de transferência
Este capítulo mostrou que os sistemas físicos podem ser modelados matemati-
camente como funções de transferências. De um modo geral, os sistemas são
compostos de subsistemas de diferentes tipos, como os elétricos, os mecânicos e
os eletromecânicos.
Atividade 1: Obter a função de transferência de cada subsistema do sistema de
controle de posicionamento de uma antena em azimute, mostrado nas Figuras 1,
2 e na Tabela 1. Use a Configuração 1. Os subsistemas individuais do sistema
estão resumidos na Tabela 2.
Figura 1 – Arranjo físico – Controle de antena (NISE, 2002).

Automação e Controle I – Aula 12T – Professor Marcio Eisencraft – julho 2006
2
Figura 2 – Esquema – Controle de antena (NISE, 2002).
Tabela 1 – Parâmetros do Esquema – Controle de antena (NISE, 2002).

Automação e Controle I – Aula 12T – Professor Marcio Eisencraft – julho 2006
3
Tabela 2 - Subsistemas do sistema de controle de posição de uma antena em a-
zimute (NISE, 2002).
Respostas:

Automação e Controle I – Aula 12T – Professor Marcio Eisencraft – julho 2006
4
Atividade 2 (desafio): Consultando o diagrama esquemático do sistema de con-
trole de posicionamento de uma antena em azimute mostrado na Figura 1, calcu-
lar a função de transferência de cada subsistema. Use a Configuração 2.
Sumário
• Neste capítulo, discutimos como obter um modelo matemático, chamado
função de transferência, para os sistemas lineares e invariantes no tempo,
de natureza elétrica, mecânica e eletromecânica. A função de transferên-
cia é definida como ( ) ( )( )sRsCsG = , ou seja, a relação da transformada de La-
place da saída pela transformada de Laplace da entrada. Esta relação é al-
gébrica e também se adapta à modelagem de sistemas interconectados.
Exercício
1. (NISE, 2002, p. 87) O Problema 4 da Lista 1 discute o controle ativo de um
mecanismo de pantógrafo para sistemas ferroviários de alta velocidade. O di-
agrama para o acoplamento do pantógrafo e da catenária está mostrado na
Figura 5(a).
Figura 5 - a. Acoplamento do pantógrafo com a catenária; b. representação sim-
plificada mostrando a força de controle ativa (NISE, 2002).

Automação e Controle I – Aula 12T – Professor Marcio Eisencraft – julho 2006
5
Admita o modelo simplificado mostrado na Figura 5(b), em que a catenária é
representada pela mola, medK .
(a) Obtenha a função de transferência, ( ) ( )( )sFsY
sGup
cat=1 , em que ( )tycat é o desloca-
mento da catenária e ( )tfup é a força para cima aplicada ao pantógrafo sob con-
trole ativo.
(b) Obtenha a função de transferência ( ) ( )( )sFsY
sGup
h=2 , em que ( )tyh é o desloca-
mento da parte superior do pantógrafo.
(c) Obtenha a função de transferência ( ) ( ) ( )( )( )sF
sYsYsG
up
cath −= .

Automação e Controle I – Aula 13T – Professor Marcio Eisencraft – julho 2006
1
Aula 13T – Modelagem no domínio do tempo: Introdução Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 90-96.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 93-96.
3 Modelagem no domínio do tempo
Objetivos do capítulo
Obter um modelo matemático, chamado representação no espaço de estados,
de sistemas lineares e invariantes no tempo.
Transformar modelos sob a forma de função de transferência em modelos no
espaço de estados.
Objetivos do estudo de caso
Dado o sistema de controle de posicionamento da antena em azimute, você
deverá ser capaz de obter a representação no espaço de estados de cada sub-
sistema.
3.1 Introdução
Para a análise e o projeto de sistemas de controle com retroação há duas a-
bordagens.
A primeira, que começamos a estudar no Capítulo 2, é conhecida como téc-
nica clássica, ou no domínio da freqüência. Esta abordagem é baseada na
transformação de uma equação diferencial em uma função de transferência,
gerando assim um modelo matemático do sistema que relaciona algebrica-
mente uma representação da saída a uma representação da entrada.
Principal desvantagem: aplicabilidade limitada – só pode ser usada em sis-
temas lineares e invariantes no tempo ou em sistemas que possam ser apro-
ximados como tal.

Automação e Controle I – Aula 13T – Professor Marcio Eisencraft – julho 2006
2
Principal vantagem: fornecem rapidamente informações sobre a estabilidade
e sobre a resposta transitória.
Com o advento da exploração espacial, os requisitos dos sistemas de controle
aumentaram de escopo. A modelagem de sistemas usando equações diferen-
ciais lineares e invariantes no tempo e as funções de transferência subseqüen-
tes se tornaram inadequadas.
A abordagem no espaço de estados (também referida como abordagem mo-
derna ou no domínio do tempo) constitui um método unificado de modela-
gem, análise e projeto de uma gama ampla de sistemas.
Por exemplo, a abordagem no espaço de estados pode ser usada para repre-
sentar sistemas não-lineares dotados de folga, saturação e zona morta.
Além disso, ela pode manipular, de forma adequada, sistemas com condições
iniciais não-nulas.
Sistemas variantes no tempo (exemplo: mísseis com níveis de combustível
variantes) podem ser representados no espaço de estados bem como sistemas
com múltiplas entradas e saídas.
Também permite representar um computador digital na malha e também é
atraente devido à disponibilidade de inúmeros pacotes de software que utili-
zam modelos no espaço de estados.
Desvantagem: não é tão intuitivo quanto a abordagem clássica. O projetista
deve se envolver com muitos cálculos antes que a interpretação física do mo-
delo se torne aparente.
3.2. Algumas observações
Nesta seção, vamos mostrar a partir de exemplos como obter a representação
por espaço de estados para um sistema.
Devem-se seguir os seguintes passos:
I. Selecionamos um subconjunto particular de todas as variáveis do sistema e
chamamos as variáveis deste conjunto de variáveis de estado.

Automação e Controle I – Aula 13T – Professor Marcio Eisencraft – julho 2006
3
II. Para um sistema de ordem n , escrevemos n equações diferenciais de primei-
ra ordem, simultâneas em termos das variáveis de estado.
III. Se conhecermos a condição inicial de todas as variáveis de estado em 0t
bem como a entrada do sistema para 0tt ≥ , poderemos resolver as equações
diferenciais simultâneas em função das variáveis de estado para 0tt ≥ .
IV. Combinamos algebricamente as variáveis de estado com a entrada e ob-
temos todas as variáveis do sistema para 0tt ≥ . Chamamos esta equação algé-
brica de equação de saída.
V. Consideramos as equações de estado e as equações de saída uma representa-
ção viável do sistema. Chamamos esta representação de representação do
sistema no espaço de estados.
Exercícios
1. (NISE, 2002, p. 91) Para o circuito elétrico de primeira ordem da Figura 1,
pede-se:
(a) Considerando como variável de estado ( )ti escreva a equação de estado para
este circuito.
(b) Repita utilizando a tensão no resistor ( )tvR como variável de estado.
(c) Considerando ( )tvR como variável de saída e ( )ti como variável de estado,
escreva a equação de saída.
(d) Repita para a tensão no indutor ( )tvL como variável de saída.
(e) Repita para a derivada da corrente como variável de saída.
Figura 1 – Circuito RL (NISE, 2002).

Automação e Controle I – Aula 13T – Professor Marcio Eisencraft – julho 2006
4
2. (NISE, 2002, p. 93) Para o circuito elétrico de 2ª ordem mostrado na Figura
2, pede-se:
Figura 2 – Circuito RLC (NISE, 2002).
(a) Escreva as equações de estado considerando a carga ( )tq e a corrente ( )ti co-
mo variáveis de estado.
(b) Escreva a equação de saída para a tensão sobre o indutor ( )tvL .
(c) Escreva a representação no espaço de estados considerando as variáveis dos
itens (a) e (b).
(d) Reescreva as equações de estado considerando como variáveis de estado
( )tvR e ( )tvC , as tensões sobre o resistor e sobre o capacitor, respectivamente.
As equações de estado podem ser escritas na forma matricial se o sistema for
linear. Ou seja, para um sistema com uma entrada e uma saída (SISO – single
input single output), podem ser escritas como:
⎩⎨⎧
+=+=
Duyu
CxBAxx
(1)
Exercício
3. (NISE, 2002, p. 91) Para a representação no espaço de estado do Exercício
2(c), determine quem representa cada uma das variáveis na Eq. (1).
3.3. A representação geral no espaço de estados
Agora vamos definir formalmente os conceitos ilustrados na seção anterior.

Automação e Controle I – Aula 13T – Professor Marcio Eisencraft – julho 2006
5
Combinação linear: uma combinação linear de n variáveis, ix , para 1=i a n
é dada pela seguinte soma, S :
1111 xkxkxkS nnnn +++= −− …
em que cada ik é uma constante.
Independência linear: diz-se que um conjunto de variáveis é linearmente in-
dependente se nenhuma das variáveis puder ser escrita como uma combina-
ção linear das outras. Por exemplo, dados 1x , 2x e 3x , se 312 65 xxx += , então
as variáveis não são linearmente independentes, uma vez que uma delas pode
ser escrita como combinação linear das demais.
Variável de sistema: qualquer variável que responda a uma entrada ou a con-
dições iniciais de um sistema.
Variáveis de estado: o menor conjunto linearmente independente de variáveis
de sistema tal que os valores dos membros do conjunto no instante 0t , junta-
mente com as funções forçantes conhecidas, determinam completamente o
valor de todas as variáveis do sistema para todos os instantes de tempo 0tt ≥ .
Vetor de estados: um vetor cujos elementos são as variáveis de estado.
Espaço de estados: o espaço n -dimensional cujos eixos são as variáveis de
estado (Figura 3). Uma trajetória pode ser imaginada como sendo o mapea-
mento do vetor ( )tx para uma faixa de valores de t . Na Figura 3 está mostra-
do também o vetor de estados no instante particular 4=t .
Equações de estado: Um conjunto de n equações diferenciais de primeira
ordem, simultâneas, com n variáveis em que as n variáveis a serem resolvi-
das são as variáveis de estado.
Equações de saída: A equação algébrica que exprime as variáveis de saída de
um sistema linear como combinações lineares das variáveis de estado e das
entradas.
Um sistema é representado no espaço de estados pelas seguintes equações:

Automação e Controle I – Aula 13T – Professor Marcio Eisencraft – julho 2006
6
Figura 3 – Representação gráfica do espaço de estados e de um vetor de estado
(NISE, 2002).
DuCxyBuAxx
+=+=
em que:
x = vetor de estado
x = derivada do vetor de estado em relação ao tempo. y = vetor de resposta
u = vetor de entrada ou de controle
A = matriz de sistema
B = matriz de entrada
C = matriz de saída
D = matriz de ação avante.
Exercícios
4. (NISE, 2002, p. 116) Dê duas razões para modelar sistemas no espaço de es-
tados.
5. (NISE, 2002, p. 116) Assinale uma vantagem da abordagem em função de
transferência sobre a representação no espaço de estados.

Automação e Controle I – Aula 14T – Professor Marcio Eisencraft – julho 2006
1
Aula 14T – Aplicando a representação no espaço de estados Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 96-104.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 94-98.
3.4 Aplicando a representação no espaço de estados
Nesta seção, vamos aplicar a formulação no espaço de estados à representa-
ção de sistemas físicos mais complicados.
O primeiro passo para representar um sistema consiste em selecionar o vetor
de estado, que deve ser escolhido com as seguintes considerações:
o Devemos selecionar um número mínimo de variáveis de estado
como componentes do vetor de estado.
o Os componentes do vetor de estado (isto é, este número mínimo de
variáveis de estado) devem ser linearmente independentes.
Variáveis de estado linearmente independentes
Os componentes do vetor de estado devem ser linearmente independentes.
Por exemplo, seguindo a definição de independência linear da Seção 3.3, se
1x , 2x e 3x forem escolhidas como variáveis de estado, mas 213 45 xxx += , en-
tão 3x não é linearmente independente de 1x e 2x , uma vez que o conheci-
mento dos valores de 1x e 2x produz o conhecimento do valor de 3x .
Número mínimo de variáveis de estado
Como saber qual o número de variáveis de estado a selecionar? Geralmente,
o número mínimo necessário é igual à ordem da equação diferencial que des-
creve o sistema.
Segundo a perspectiva da função de transferência, a ordem da equação dife-
rencial é a ordem do denominador da função de transferência depois do can-
celamento dos fatores comuns ao numerador e ao denominador.

Automação e Controle I – Aula 14T – Professor Marcio Eisencraft – julho 2006
2
Na maioria dos casos, uma outra forma de determinar o número de variáveis
de estado é contar o número de elementos armazenadores de energia inde-
pendentes existentes no sistema.
No caso de circuitos elétricos, nossa abordagem consiste em escrever a equa-
ção simples da derivada para cada um dos elementos armazenadores de ener-
gia (capacitores e indutores) e expressar a derivada como uma combinação
linear das variáveis de sistema e de entrada presentes na equação.
Nos sistemas mecânicos, mudamos a escolha de variáveis de estado para po-
sição e velocidade de cada ponto com movimento linear independente.
Exercícios
1. (NISE, 2002, p 97) Dado o circuito elétrico da Figura 1, obter uma represen-
tação no espaço de estados se a saída for a corrente através do resistor.
Figura 1 - Circuito elétrico para representação no espaço de estados (NISE,
2002).
2. (NISE, 2002, p. 101) Obter as equações de estado para o sistema mecânico
em translação mostrado na Figura 2. Qual a equação de saída se a variável de
saída for ( )tx2 ?
Figura 2 - Sistema mecânico em translação (NISE, 2002).

Automação e Controle I – Aula 14T – Professor Marcio Eisencraft – julho 2006
3
3. (NISE, 2002, p. 101) Obter a representação no espaço de estados do circuito
elétrico mostrado na Figura 3. A saída é ( )tvo .
Figura 3 - Circuito elétrico para o Exercício 3 (NISE, 2002).
4. (NISE, 2002, p. 102) Obter a representação no espaço de estados do sistema
mecânico mostrado na Figura 4 em que a saída é ( )tx3 .
Figura 4 - Sistema mecânico em translação para o Exercício 4 (NISE, 2002).
5. (NISE, 2002, p. 99) Obter as equações de estado e de saída do circuito elétri-
co mostrado na Figura 5 se o vetor de saída for [ ]TRR iv 22=y , em que T sig-
nifica a transposta do vetor.
Figura 5 - Circuito elétrico para o Exercício 5.

Automação e Controle I – Aula 15T – Professor Marcio Eisencraft – julho 2006
1
Aula 15T – Convertendo uma função de transferência para o espaço de estados Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 102-107.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 96-103.
3.5 Convertendo uma função de transferência para o espaço de estados
Nesta seção vamos aprender como passar de uma representação em função
de transferência para uma representação no espaço de estados.
Uma vantagem da representação no espaço de estados é que ela pode ser u-
sada para simular sistemas físicos num computador digital.
Desta forma, se quisermos simular um sistema representado por uma função
de transferência, devemos primeiro converter a representação por função de
transferência em representação no espaço de estados.
Vamos dividir o problema em dois casos.
1º caso: Função de transferência com numerador constante
Seja a função de transferência:
( )( ) 01
11
0
asasasb
sRsC
nn
n ++++= −
− … .
Esta função representa a equação de diferenças:
( )trbcadtdca
dtcda
dtcd
n
n
nn
n
0011
1
1 =++++ −
−
− … .
Um jeito simples de obter a representação no espaço de estados é escolher
um conjunto de variáveis de estado chamadas de variáveis de fase, em que
cada variável de estado subseqüente é a derivada de estado anterior. Assim,
tomamos:

Automação e Controle I – Aula 15T – Professor Marcio Eisencraft – julho 2006
2
1
1
2
2
3
2
1
−
−
=
=
=
=
n
n
n dtcdx
dtcdx
dtdcx
cx
.
A entrada é ( )tru = e a saída é ( )tcy = .
Com esta escolha, temos as seguintes equações de entrada e de saída:
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=+−−−−−=
===
−−
1
011322110
43
32
21
xyubxaxaxaxax
xxxxxx
nnn …
Na forma matricial:
[ ]⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
+=⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−−
=
−
uy
u
baaaaaaa n
00001
0
000
1000000
000100000001000000010
01543210
x
xx
………
………
(1)
A Eq. (1) é a forma em variáveis de fase das equações de estado. Essa forma
é reconhecida facilmente pelo padrão exclusivo de 1´s e 0´s e do negativo
dos coeficientes da equação diferencial, escritos em ordem inversa, na última
linha da matriz de sistema.
Exercício
1. (NISE, 2002, p. 104) Obter a representação no espaço de estados sob a forma
de variáveis de fase da função de transferência mostrada na Figura 1. Dese-

Automação e Controle I – Aula 15T – Professor Marcio Eisencraft – julho 2006
3
nhar também um diagrama de blocos com integradores, somadores e ganhos
que implementem este sistema.
Figura 1 - Função de transferência (NISE, 2002).
2º caso: Função de transferência com polinômio no numerador
Seja, por exemplo, a função de transferência mostrada na Figura 2(a).
Figura 2 – Decompondo uma função de transferência (NISE, 2002).
Neste caso, primeiro separamos a função de transferência em duas, associa-
das em cascata, como mostrado na Figura 2(b). A primeira é o denominador
e a segunda, o numerador.
A primeira função de transferência com apenas o denominador é convertida
na representação por variáveis de fase no espaço de estados como feito ante-
riormente. Portanto, a variável de fase 1x é a saída e as outras variáveis de fa-
se são variáveis internas do primeiro bloco, como mostrado na Figura 2(b).
A segunda função de transferência com apenas o numerador conduz a
( ) ( ) ( ) ( )sXbsbsbsCsY 1012
2 ++==

Automação e Controle I – Aula 15T – Professor Marcio Eisencraft – julho 2006
4
em que, depois de obtida a transformada de Laplace inversa com condições ini-
ciais nulas,
( ) 101
121
2
2 xbdtdx
bdt
xdbty ++=
Mas os termos com derivadas são as definições das variáveis de fase obtidas
no primeiro bloco. Assim, escrevendo-se os termos em ordem inversa para
dar a forma de uma equação de saída,
( ) 322110 xbxbxbty ++= .
Portanto, o segundo bloco forma simplesmente uma combinação linear espe-
cífica das variáveis de fase desenvolvidas no primeiro bloco.
Segundo uma outra perspectiva, o denominador da função de transferência
conduz às equações de estado enquanto o numerador fornece a equação de
saída.
Exercício
2. (NISE, 2002, p. 106) Obter a representação no espaço de estados da função
de transferência mostrada na Figura 3. Desenhar também um diagrama de
blocos com integradores, somadores e ganhos que implementem este sistema.
Figura 3 - Função de transferência (NISE, 2002).
3. (NISE, 2002, p. 107) Obter as equações de estado e a equação de saída da
representação em variáveis de fase da função de transferência
( )97
122 ++
+=
ssssG .
4. (NISE, 2002, p. 119) Um míssil em vôo, como mostrado na Figura 4, está
submetido a diversas forças: empuxo, sustentação, arrasto e ação da gravida-

Automação e Controle I – Aula 15T – Professor Marcio Eisencraft – julho 2006
5
de. O míssil voa com um ângulo de ataque, α , em relação ao eixo longitudi-
nal, criando sustentação. Para manobrar o míssil, controla-se o ângulo φ do
corpo do míssil em relação à vertical, movendo angularmente o motor pro-
pulsor da parte traseira. A função de transferência relacionando o ângulo φ
ao deslocamento δ do motor é da forma:
( )( ) 01
22
33 KsKsKsK
KsKss ba
++++
=ΔΦ
.
Representar o controle de manobra do míssil no espaço de estados.
Figura 4 – Míssil (NISE, 2002).
5. (NISE, 2002, p. 118) Represente a seguinte função de transferência no espa-
ço de estados. Dê sua resposta na forma matricial vetorial.
( ) ( )( )( )451
732
2
+++++
=sss
sssT

Automação e Controle I – Aula 16T – Professor Marcio Eisencraft – julho 2006
1
Aula 16T – Convertendo do espaço de estados para função de transferência Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 108-109.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 107-108.
3.6 Convertendo do espaço de estados para a função de transferência
Nos Capítulos 2 e 3 exploramos dois métodos para representar sistemas: (1) a
representação em função de transferência e (2) a representação no espaço de
estados.
Na aula anterior, unificamos as duas representações convertendo funções de
transferência em representações no espaço de estados.
Agora, vamos mover na direção contrária e converter a representação no es-
paço de estados em função de transferência.
Dadas as equações de estado e de resposta:
DuCxyBuAxx
+=+=
,
aplicando a transformada de Laplace, obtemos:
( ) ( ) ( )ssss BUAXX += (1)
( ) ( ) ( )sss DUCXY += (2)
Explicitando ( )sX na Eq. (1),
( ) ( ) ( )sss BUXAI =−
ou
( ) ( ) ( )sss BUAIX 1−−= (3)
em que I é a matriz identidade.
Substituindo a Eq. (3) na Eq. (2), resulta:
( ) ( ) ( ) ( )( )[ ] ( )ss
ssss
UDBAIC
DUBUAICY
+−=
=+−=−
−
1
1

Automação e Controle I – Aula 16T – Professor Marcio Eisencraft – julho 2006
2
Chamamos a matriz ( )[ ]DBAIC +− −1s de matriz função de transferência,
uma vez que ela relaciona o vetor de saída, ( )sY , ao vetor de entrada ( )sU .
Quando ( ) ( )sUs =U e ( ) ( )sYs =Y forem escalares, podemos obter a função de
transferência:
( ) ( )( ) ( ) DBAIC +−== −1ssUsYsT
Exercícios
1. (NISE, 2002, p. 109) Converter as equações de estado e a equação de saída
mostradas a seguir em função de transferência:
[ ]x
xx
625,05,102
045,14
=
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡ −−=
y
u
2. (NISE, 2002, p. 108) Dado o sistema definido pelas equações a seguir, obter
a função de transferência ( ) ( )( )sUsYsT = em que ( )sU é a entrada e ( )sY a saída.
[ ]x
xx
00100
10
321100010
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
y
u
3. (NISE, 2002, p. 118) Obtenha a função de transferência ( ) ( )( )sRsYsG = , para ca-
da um dos sistemas representados no espaço de estados:
(a)
[ ]x
xx
0011000
523100010
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
y
r

Automação e Controle I – Aula 16T – Professor Marcio Eisencraft – julho 2006
3
(b)
[ ]x
xx
631641
453350832
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−=
y
r
(c)
[ ]x
xx
34123
5
263781253
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−
=
y
r

Automação e Controle I – Aula 17T – Professor Marcio Eisencraft – julho 2006
1
Aula 17T – Estudos de caso: Robótica Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 112-122.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 121-139.
3.7. Estudo de caso
Atividades
1. (NISE, 2002, p. 120) O retorno de robôs a um ponto de referência, baseado
em imagens, pode ser implementado gerando-se os comandos de entrada de
rumo para um sistema de manobra baseado no seguinte algoritmo de guia-
mento: suponha que o robô mostrado na Figura 1(a) deve ir do ponto R para
um alvo, o ponto T , como mostrado na Figura 1(b). Se XR , YR e ZR são ve-
tores do robô a cada marco de referência, X , Y , Z , respectivamente, e XT ,
YT e ZT são vetores do alvo a cada marco de referência, respectivamente, en-
tão os comandos de rumo devem acionar o robô para minimizar XX TR − ,
YY TR − e ZZ TR − simultaneamente, uma vez que as diferenças tenderão a
zero se o robô alcançar o alvo. Se a Figura 1(c) representa o sistema de con-
trole de manobra do robô, represente cada bloco – controlador, roda e veículo
– no espaço de estados.

Automação e Controle I – Aula 17T – Professor Marcio Eisencraft – julho 2006
2
Figura 1 - a. Robô com sistema de imagem por televisão (©1992 IEEE); b. dia-
grama vetorial mostrando o conceito por trás do acompanhamento automático
baseado em imagem (©1992 IEEE); c. sistema de controle de rumo. (NISE,
2002).
2. (NISE, 2002, p. 121) Os manipuladores robóticos modernos que atuam dire-
tamente sobre o ambiente-alvo devem ser controlados de modo que as forças
de impacto bem como as forças de estado estacionário não danifiquem o al-
vo. Ao mesmo tempo, o manipulador deve fornecer força suficiente para e-
xecutar a tarefa. Para desenvolver um sistema de controle para regular estas
forças, há necessidade de modelar o manipulador robótico e o ambiente-alvo.
Supondo o modelo mostrado na Figura 2, represente, no espaço de estados, o
manipulador robótico e o ambiente sob as seguintes condições:
(a) O manipulador não está em contato direto com o ambiente-alvo.

Automação e Controle I – Aula 17T – Professor Marcio Eisencraft – julho 2006
3
(b) O manipulador está em contato constante com o ambiente-alvo.
Figura 2 - Manipulador robótico e ambiente-alvo (©1997 IEEE) (NISE, 2002).
3. (NISE, 2002, p. 120) Considerar a aeronave militar F4-E mostrada na Figura
3(a), em que a aceleração normal, na , e a velocidade angular de arfagem, q ,
são controladas pela deflexão do profundor, eδ , sobre os estabilizadores hori-
zontais, e pela deflexão das superfícies aerodinâmicas dianteiras (canards),
Cδ . Um comando de deflexão COMδ , como mostrado na Figura 3(b) é usado
para efetuar uma alteração em ambas as deflexões eδ e Cδ . As relações são:
( )( )( )( ) τ
τδδ
ττ
δδ
1
11
+=
+=
sK
ss
sss
C
COM
C
COM
e
Estas deflexões produzem, através da dinâmica longitudinal da aeronave, na e
q . As equações de estado descrevendo os efeitos de COMδ sobre na e q são dadas
por:
COM
e
n
e
n
qa
qa
δδδ ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
140
06,272
140099,31418,122,038,26372,50702,1
.
Obter as seguintes funções de transferência:
( ) ( )( )
( ) ( )( )s
sQsG
ssA
sG
COM
COM
n
δ
δ
=
=
2
1

Automação e Controle I – Aula 17T – Professor Marcio Eisencraft – julho 2006
4
Figura 3 - a. F4-E com canards (© 1992 AIAA); b. sistema de controle de vôo a
malha aberta (© 1992 AIAA). (NISE, 2002).
4. (NISE, 2002, p. 121) A Figura 4(b) mostra um modelo de sistema mecânico
em translação relativo a um pantógrafo para ferrovia de alta velocidade, usa-
do para fornecer energia elétrica a um trem a partir de uma catenária suspen-
sa. Representar o pantógrafo no espaço de estados, onde a saída é o desloca-
mento da parte superior do pantógrafo ( ) ( )tyty cath − .

Automação e Controle I – Aula 17T – Professor Marcio Eisencraft – julho 2006
5
Figura 4 - a. Acoplamento do pantógrafo com a catenária; b. representação.
Simplificada mostrando a força de controle ativa (NISE, 2002).
5. (NISE, 2002, p. 117) Represente o sistema mecânico em rotação mostrado na
Figura 5 no espaço de estados em que ( )t1θ é a saída.
Figura 5 – (NISE, 2002).

Automação e Controle I – Aula 18T – Professor Marcio Eisencraft – julho 2006
1
Aula 18T – Resposta no domínio do tempo - Introdução Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p.
ISBN 8521613016. Páginas 123-126.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo ; Rio
de Janeiro: Makron, c1997. 558 p. ISBN 8534605963. Páginas 134-135.
CAPÍTULO 4 – RESPOSTA NO DOMÍNIO DO TEMPO
Objetivos do capítulo
Neste capítulo iremos aprender o seguinte:
o Como obter a resposta no domínio do tempo a partir da função
de transferência;
o Como usar pólos e zeros para determinar quantitativamente a
resposta de um sistema de controle;
o Como descrever quantitativamente a resposta transitória de
sistemas de primeira e segunda ordem;
o Como aproximar sistemas de ordem maior por sistemas de
primeira e segunda ordem;
o Como visualizar os efeitos de não-linearidades na resposta de
sistemas no domínio do tempo;
o Como obter a resposta no domínio do tempo a partir da repre-
sentação no espaço de estados.
4.1 Introdução
No Cap. 2 mostramos como as funções de transferência podem repre-
sentar sistemas lineares e invariantes no tempo.
No Cap. 3 os sistemas foram representados diretamente no domínio do
tempo por intermédio das equações de estado e de saída.

Automação e Controle I – Aula 18T – Professor Marcio Eisencraft – julho 2006
2
Depois que o engenheiro obtém uma representação de um subsistema,
este é analisado através das respostas transitória e de estado estacionário
para ver se estas características conduzem ao comportamento desejado.
Este capítulo se destina à análise da resposta transitória de sistemas.
Depois de descrever uma ferramenta valiosa de análise e de projeto, pó-
los e zeros, começaremos a analisar nossos modelos para obter a respos-
ta ao degrau de sistemas de primeira e de segunda ordem.
A ordem se refere à ordem da equação diferencial equivalente que re-
presenta o sistema – a ordem do denominador da função de transferên-
cia depois do cancelamento de fatores comuns com o numerador ou o
número de equações diferenciais de primeira ordem simultâneas neces-
sárias para a representação no espaço de estados.
4.2 Pólos, zeros e resposta do sistema.
A resposta de saída de um sistema é a soma de duas respostas: a respos-
ta forçada ou em regime estacionário e a resposta natural ou transitó-
ria.
Embora diversas técnicas, como a solução de equações diferenciais ou a
aplicação da transformada de Laplace inversa, permitam calcular essas
respostas, tais técnicas são trabalhosas e consomem muito tempo.
A produtividade é favorecida pelas técnicas de análise e projeto que
produzam resultados com um mínimo de tempo.
Se a técnica for tão rápida que seja possível obter o resultado desejado
por inspeção, usamos algumas vezes o atributo qualitativo para descre-
ver o método.
O uso de pólos e zeros e de sua relação com a resposta de sistemas no
domínio do tempo é uma dessas técnicas.

Automação e Controle I – Aula 18T – Professor Marcio Eisencraft – julho 2006
3
Pólos de uma função de transferência
Os pólos de uma função de transferência são os valores da variável, s ,
da transformada de Laplace que fazem com que a função de transferên-
cia se torne infinita.
Zeros de uma função de transferência
Os zeros de uma função de transferência são os valores da variável, s ,
da transformada de Laplace que fazem com que a função de transferên-
cia se torne igual a zero.
Pólos e zeros de um sistema de primeira ordem: um exemplo
Exercício
1. (NISE, 2002, p. 124) Dada a função de transferência ( )sG da Figura 1,
pede-se:
Figura 1 - Sistema mostrando entrada e saída (NISE, 2002).
(a) Determine os pólos e zeros deste sistema.
(b) Localize os pólos e zeros no plano complexo. Usa-se um ‘×’ para loca-
lizar pólos e ‘ο’ para localizar zeros.
(c) Utilizando a transformada de Laplace inversa, determine a resposta ao
degrau do sistema.
(d) Especifique a resposta em regime estacionário e a resposta transitória.
Com base no desenvolvimento do Exercício 1, resumido na Figura 2,
pode-se concluir que:

Automação e Controle I – Aula 18T – Professor Marcio Eisencraft – julho 2006
4
Figura 2 - Evolução de uma resposta de sistema. Siga as setas voltadas para
baixo para ver a evolução dos componentes da resposta gerada pelo pólo ou
pelo zero. (NISE, 2002).
I. Um pólo da função de entrada gera a forma da resposta forçada ou em
regime permanente (isto é, o pólo na origem gerou a função degrau na
saída).
II. Um pólo da função de transferência gera a forma da resposta natural ou
transitória (isto é, o pólo em -5 gerou te 5− ).
III. Um pólo sobre o eixo real gera uma resposta exponencial da forma te α− , em que α− é a localização do pólo sobre o eixo real. Assim, quan-
to mais a esquerda fique situado o pólo sobre o eixo real negativo, tanto
mais rápido será o decaimento da resposta transitória exponencial para
zero.
IV. Os pólos e zeros geram as amplitudes para ambas as respostas, natu-
ral e forçada.

Automação e Controle I – Aula 18T – Professor Marcio Eisencraft – julho 2006
5
Exercícios
2. (NISE, 2002, p. 126) Dado o sistema da Figura 4, escrever a saída ( )tc ,
em termos genéricos. Especificar as partes forçada e natural da solução.
Figura 3 - Sistema para o Exercício 2 (NISE, 2002).
3. (NISE, 2002, p. 126) Um sistema possui uma função de transferência
( ) ( )( )( )( )( )( )10871
6410++++
++=
sssssssG . Escrever, por inspeção, a saída, ( )tc , em
termos genéricos, se a entrada for um degrau unitário.
4. (NISE, 2002, p. 169) Em um sistema com uma entrada e uma saída, que
pólos geram a resposta em estado estacionário?
5. (NISE, 2002, p. 169) Em um sistema com uma entrada e uma saída, que
pólos geram a resposta transitória?

Automação e Controle I – Aula 19T – Professor Marcio Eisencraft – julho 2006
1
Aula 19T – Sistemas de primeira ordem Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: Livros Técnicos e Científi-
cos, c2004. 695 p. ISBN 8521613016 Páginas 127-129.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo: Makron
Books, c1997. 558 p. : il. 24 cm ISBN 85-346-0596-3 Páginas 135-140.
4.3. Sistemas de primeira ordem
Um sistema de primeira ordem sem zeros pode ser descrito pela função de
transferência mostrada na Figura 1(a).
Figura 1 - a. Sistema de primeira ordem; b. gráfico do pólo (NISE, 2002).
Se a entrada for um degrau unitário, ou seja, ( )s
sR 1= , a transformada da saí-
da, ( )sC , será:
( ) ( ) ( ) ( )assasGsRsC+
=⋅= .
Aplicando a transformada de Laplace inversa, obtemos a resposta ao degrau
que é dada por:
( ) ( ) ( ) atnf etctctc −−=+= 1 (1)
em que o pólo da entrada situado na origem gerou a resposta forçada 1=fc e o
pólo do sistema em a− , gerou a resposta natural ( ) atn etc −−= .
A Figura 2 mostra um gráfico de ( )tc .

Automação e Controle I – Aula 19T – Professor Marcio Eisencraft – julho 2006
2
Figura 2 - Resposta de um sistema de primeira ordem a um degrau unitário (NI-
SE, 2002).
Observe que quando a
t 1= ,
63,037,01111 11
=−=−=−=⎟⎠⎞
⎜⎝⎛ −−
eea
c aa
. (2)
Usamos agora as equações acima para definir três especificações da resposta
transitória.
Constante de tempo
Chamamos a1 de constante de tempo da resposta.
Com base na Eq.(2), a constante de tempo é o tempo necessário para que a
resposta ao degrau alcance 63% do seu valor final.

Automação e Controle I – Aula 19T – Professor Marcio Eisencraft – julho 2006
3
Como a derivada de ( )tc é igual a a para 0=t , a é a taxa inicial de variação
da exponencial em 0=t .
Portanto, a constante de tempo pode ser considerada uma especificação da
resposta transitória de um sistema de primeira ordem, uma vez que está rela-
cionada com a velocidade com que o sistema responde a uma entrada em de-
grau.
Tempo de subida, ( RT )
O tempo de subida é definido como o tempo necessário para que a forma de
onda vá de 0,1 a 0,9 do seu valor final.
O tempo de subida é obtido resolvendo a Eq. (2) para a diferença entre os
valores de t para os quais ( ) 9,0=tc e ( ) 1,0=tc . Portanto,
aaaTR
2,211,031,2=−= (3)
Exercício
1. A partir da definição de RT , deduza a Eq. (3).
Tempo de assentamento ( ST )
O tempo de assentamento é definido como o tempo necessário para que a
resposta alcance uma faixa de valores de 2% em torno do valor final e aí
permaneça. Fazendo ( ) 98,0=tc na Eq. (1), obtemos o tempo de assentamento
como:
aTS
4= (4)
Exercício
2. Demonstre a Eq. (4) a partir da definição de ST .

Automação e Controle I – Aula 19T – Professor Marcio Eisencraft – julho 2006
4
Funções de transferência de primeira ordem obtidas experimentalmente
Frequentemente não é possível ou prático obter analiticamente a função de
transferência de um sistema.
Possivelmente o sistema é fechado e as partes componentes não são identifi-
cáveis facilmente.
Com uma entrada degrau, podemos medir a constante de tempo e o valor do
estado estacionário, a partir de cujos valores podemos calcular a função de
transferência.
Considere um sistema de primeira ordem,
( )as
KsG+
= ,
cuja resposta ao degrau é:
( ) ( ) asaK
saK
assKsC
+−=
+= .
Se pudermos identificar os valores de K e de a a partir de ensaios em labora-
tório, poderemos obter a função de transferência do sistema.
Exercício
3. Suponha que um sistema de primeira ordem tenha a resposta dada na Figura
3. Determine sua função de transferência.
Figura 3 - Resultados de laboratório de um ensaio com resposta de um sistema
ao degrau (NISE, 2002).

Automação e Controle I – Aula 19T – Professor Marcio Eisencraft – julho 2006
5
4. (NISE, 2002, p. 129) Um sistema possui uma função de transferência
( )50
50+
=s
sG . Obter a constante de tempo, CT , o tempo de assentamento ST e
o tempo de subida, RT .
5. (NISE, 2002, p. 170) Determine a tensão no capacitor do circuito mostrado
na Figura 4 quando a chave fechar em 0=t . Admita condições iniciais nulas.
Determine também a constante de tempo, o tempo de subida e o tempo de as-
sentamento para a tensão no capacitor.
Figura 4 – (NISE, 2002).
Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
1
Aula 21T – Sistemas de segunda ordem: Introdução Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: Livros Técnicos e Científi-
cos, c2004. 695 p. ISBN 8521613016. Páginas 129-133.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo: Makron
Books, c1997. 558 p. : il. 24 cm ISBN 85-346-0596-3. Páginas 140-143.
4.4. Sistemas de segunda ordem: introdução
Comparando com a simplicidade dos sistemas de primeira ordem, os siste-
mas de segunda ordem apresentam uma ampla gama de respostas que deve
ser analisada e descrita.
Enquanto nos sistemas de primeira ordem a variação de um parâmetro muda
simplesmente a velocidade da resposta, as mudanças nos parâmetros do sis-
tema de segunda ordem podem alterar a forma da resposta.
Exemplos numéricos das respostas dos sistemas de segunda ordem são mos-
trados na Figura 1.
Todos os exemplos são deduzidos a partir da Figura 1(a), o caso geral que
tem dois pólos finitos e nenhum zero.
A resposta ao degrau pode ser encontrada usando ( ) ( ) ( )sRsGsC = , em que
( )s
sR 1= , seguida de uma expansão em frações parciais e da aplicação da
transformada de Laplace inversa.
Resposta superamortecida, Figura 1(b).
Para esta resposta,
( ) ( ) ( )( )146,1854,79
999
2 ++=
++=
sssssssC .
Esta função possui um pólo na origem que vem da entrada degrau unitário e
dois pólos reais provenientes do sistema.
A saída é escrita como

Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
2
Figura 1 - Sistemas de segunda ordem, gráficos de pólos e respostas ao degrau
(NISE, 2002).
Subamortecido
Superamortecido

Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
3
( ) tt eKeKKtc 146,13
854,721
−− ++= .
Esta resposta, mostrada na Figura 1(b) é chamada superamortecida.
Resposta subamortecida, Figura 1(c).
Para esta resposta,
( ) ( )929
2 ++=
ssssC .
Esta função possui um pólo na origem em degrau unitário e dois pólos com-
plexos provenientes do sistema.
Os pólos que geram a resposta natural são 81 js +−= . Assim, ( )sC pode ser
expandida como:
( )8181 js
Cjs
BsAsC
+++
−++= .
A linha (10b) da Tabela 2.1 da Aula 4T fornece o seguinte par transformado:
( )jbas
rejbas
rebtrejj
at
+++
−+↔+
−−
θθ
θ 5,05,0cos . (1)
Assim, a forma geral da resposta ao degrau será:
( ) ( )θ++= − teKKtc t 8cos21 .
A parte real do pólo coincide com o decaimento exponencial da senóide en-
quanto a parte imaginária do pólo coincide com a freqüência da oscilação se-
noidal.
A esta freqüência da senóide é dado o nome de freqüência amortecida, dω .
A Figura 2 mostra uma resposta senoidal amortecida genérica de um sistema
de segunda ordem.

Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
4
Figura 2 - Componente da resposta ao degrau de sistema de segunda ordem ge-
rados por pólos complexos (NISE, 2002).
Chamamos este tipo de resposta de resposta subamortecida.
Exercício
1. (NISE, 2002, p. 131) Escreva, por inspeção, a forma da resposta ao degrau do
sistema da Figura 3.
Figura 3 – Sistema para o Exercício 1 (NISE, 2002).
Voltaremos à resposta subamortecida do sistema nas próximas aulas em que
iremos generalizar a discussão e deduzir alguns resultados que relacionam a
posição do pólo a outros parâmetros da resposta.

Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
5
Resposta sem amortecimento, Figura 1(d).
Para esta resposta,
( ) ( )99
2 +=
sssC .
Esta função possui um pólo na origem que vem da entrada em degrau unitá-
rio e dois pólos imaginários puros provenientes do sistema. Expandindo,
( )33 js
Cjs
BsAsC
−+
++= .
Usando novamente (1) com 0=a , obtemos a resposta genérica neste caso:
( ) ( )θ++= tAtc 3cos
Este tipo de resposta, mostrado na Figura 1(d) é chamado sem amortecimen-
to.
Resposta criticamente amortecida, Figura 1(e).
Para esta resposta,
( ) ( ) ( )22 39
969
+=
++=
ssssssC .
Esta função possui um pólo na origem que vem da entrada em degrau unitá-
rio e dois pólos reais e iguais provenientes do sistema.
Expandindo,
( )( )2
321
33 ++
++=
sK
sK
sKsC .
Assim,
( ) tt teKeKKtc 33
321
−− ++=
Este tipo de resposta, mostrado na Figura 1(e) é chamada criticamente amor-
tecido.
Respostas criticamente amortecida são as mais rápidas possíveis sem a ultra-
passagem que é característica da resposta subamortecida.
Resumindo:
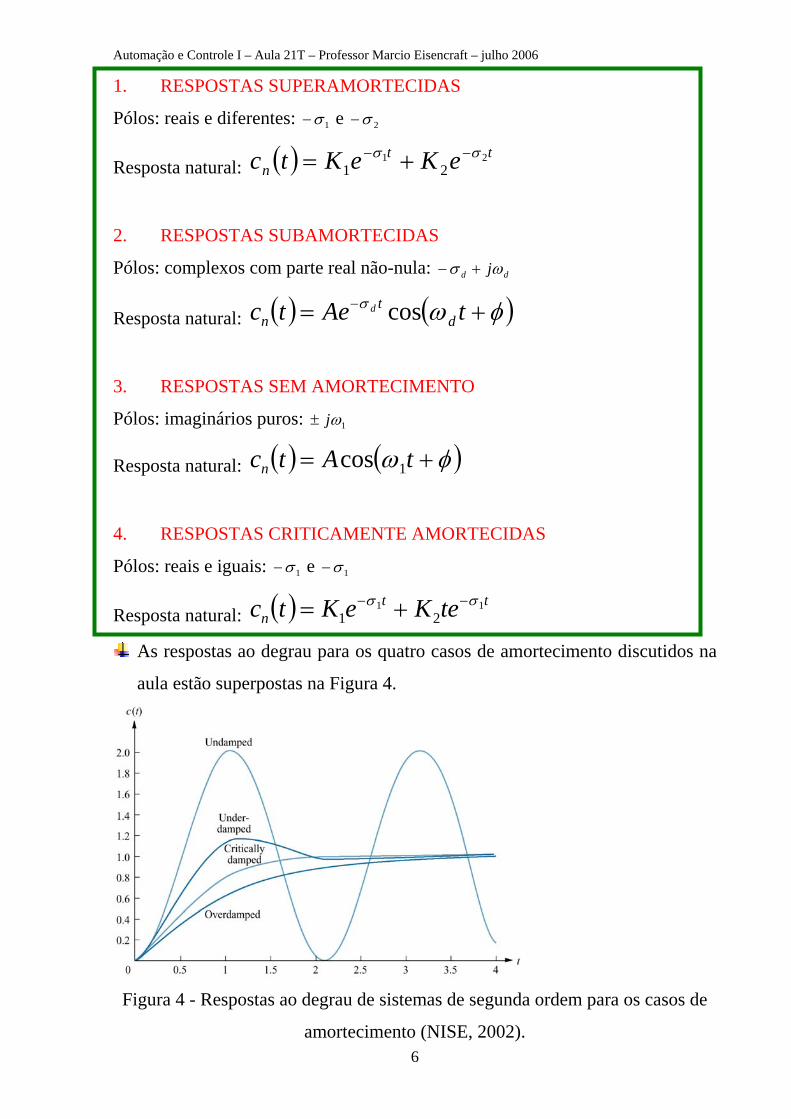
Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
6
1. RESPOSTAS SUPERAMORTECIDAS
Pólos: reais e diferentes: 1σ− e 2σ−
Resposta natural: ( ) ttn eKeKtc 21
21σσ −− +=
2. RESPOSTAS SUBAMORTECIDAS
Pólos: complexos com parte real não-nula: dd jωσ +−
Resposta natural: ( ) ( )φωσ += − tAetc dt
nd cos
3. RESPOSTAS SEM AMORTECIMENTO
Pólos: imaginários puros: 1ωj±
Resposta natural: ( ) ( )φω += tAtcn 1cos
4. RESPOSTAS CRITICAMENTE AMORTECIDAS
Pólos: reais e iguais: 1σ− e 1σ−
Resposta natural: ( ) ttn teKeKtc 11
21σσ −− +=
As respostas ao degrau para os quatro casos de amortecimento discutidos na
aula estão superpostas na Figura 4.
Figura 4 - Respostas ao degrau de sistemas de segunda ordem para os casos de
amortecimento (NISE, 2002).

Automação e Controle I – Aula 21T – Professor Marcio Eisencraft – julho 2006
7
Observe que o caso criticamente amortecido caracteriza a separação entre os
casos superamortecidos e subamortecidos e constitui a resposta mais rápida
sem ultrapassagem.
Exercício
2. (NISE, 2002, p. 133) Escreva, por inspeção, a forma geral da resposta ao de-
grau para cada uma das seguintes funções de transferência:
(a) ( )40012
4002 ++
=ss
sG
(b) ( )90090
9002 ++
=ss
sG
(c) ( )22530
2252 ++
=ss
sG
(d) ( )625
6252 +
=s
sG

Automação e Controle I – Aula 22T – Professor Marcio Eisencraft – julho 2006
1
Aula 22T – Sistema de segunda ordem geral Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: Livros Técnicos e Científi-
cos, c2004. 695 p. ISBN 8521613016. Páginas 134-136.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo: Makron
Books, c1997. 558 p.: il. 24 cm ISBN 85-346-0596-3. Páginas 140-143.
4.5. O sistema de segunda ordem geral
Na aula de hoje vamos definir duas especificações dos sistemas de segunda
ordem com significado físico.
As duas grandezas são chamadas de freqüência natural e relação de amorte-
cimento.
Freqüência natural - nω
A freqüência natural de um sistema de segunda ordem é a freqüência de os-
cilação do sistema sem amortecimento.
Por exemplo, a freqüência de oscilação de um circuito RLC série com a resis-
tência curto-circuitada será a freqüência natural.
Relação de amortecimento - ζ
A relação de amortecimento ζ é definida como:
natural freqüênciadecaimento de lexponencia freqüência
=ζ ou
(s) lexponencia tempode constante(s) natural período
21π
ζ = .
Vamos agora relacionar essas grandezas com a forma geral dos sistemas de
2ª ordem:
( )bass
bsG++
= 2 .
Para um sistema sem amortecimento, teríamos 0=a e, neste caso,

Automação e Controle I – Aula 22T – Professor Marcio Eisencraft – julho 2006
2
( )bs
bsG+
= 2 .
Por definição, a freqüência natural é a freqüência de oscilação deste sistema.
Como os pólos deste sistema estão sobre o eixo ωj em bj± ,
bn =ω .
Portanto,
2nb ω= .
Supondo o sistema subamortecido, os pólos complexos possuem uma parte
real, σ , igual a 2a
− . A magnitude deste valor é então a freqüência de decai-
mento exponencial descrita na aula passada. Assim,
nn
a
ωωσ
ζ 2natural freqüência
decaimento de lexponencia freqüência===
ou na ζω2=
Nossa função de transferência genérica finalmente adquire a forma:
( )2
2 22n
n n
G ss s
ωζω ω
=+ + . (1)
Exercício
1. (NISE, 2002, p. 135) Dada a função de transferência a seguir, obter ζ e nω :
( )362,4
362 ++
=ss
sG .
Calculando os pólos da função de transferência (1), obtemos:
12 −±−= ζωζω nns (2)

Automação e Controle I – Aula 22T – Professor Marcio Eisencraft – julho 2006
3
Desta equação, constatamos que os vários casos da resposta de segunda or-
dem são uma função de ζ e estão resumidos na Figura 1 a seguir.
Figura 1 - Respostas de segunda ordem em função da relação de amortecimento
(NISE, 2002).
Exercícios
2. (NISE, 2002, p. 136) Para cada um dos sistemas mostrados na Figura 2, obter
o valor de ζ e relatar o tipo de resposta esperado.

Automação e Controle I – Aula 22T – Professor Marcio Eisencraft – julho 2006
4
Figura 2 - Sistemas para o Exercício 2 (NISE, 2002).
3. (NISE, 2002, p. 136) Para cada uma das funções de transferência a seguir,
faça o seguinte: (1) obtenha os valores de ζ e nω ; (2) caracterize a natureza
da resposta.
(a) ( )40012
4002 ++
=ss
sG
(b) ( )90090
9002 ++
=ss
sG
(c) ( )22530
2252 ++
=ss
sG
(d) ( )625
6252 +
=s
sG

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
1
Aula 23T – Sistemas de segunda ordem subamortecidos Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 136-145.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo; Rio de
Janeiro: Makron, c1997. 558 p. ISBN 8534605963. Páginas 140-150.
4.6. Sistemas de segunda ordem subamortecidos
Nesta aula, vamos definir especificações associadas ao regime transitório da
resposta subamortecida.
Comecemos obtendo a resposta ao degrau do sistema de segunda ordem ge-
nérico dado por:
( )2
2 22n
n n
G ss s
ωζω ω
=+ + .
A transformada da resposta, ( )sC é a transformada da entrada multiplicada
pela função de transferência, ou seja,
( ) ( )2
2 312 22 2 22
n
n nn n
K s KKC ss s ss s s
ωζω ωζω ω+
= = ++ ++ +
em que se supõe que 1<ζ (caso subamortecido).
Aplicando a transformada de Laplace inversa, pode-se mostrar que:
( ) ( )φζωζ
ζω −−−
−= − tetc ntn 2
21cos
111 (1)
Com ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−=
21arctan
ζ
ζφ .
Na Figura 1 aparece um gráfico desta resposta para diversos valores de ζ ,
traçado em função do eixo de tempos normalizado tnω . Vemos agora a rela-
ção entre o valor de ζ e o tipo de resposta obtido: quanto menor o valor de
ζ , tanto mais oscilatória será a resposta.

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
2
Figura 1 - Respostas de segunda ordem subamortecidas com os valores da rela-
ção de amortecimento (NISE, 2002).
Outros parâmetros associados à resposta subamortecida (Figura 2):
Instante de pico, PT : tempo necessário para alcançar o primeiro valor de pico
(máximo).
Ultrapassagem percentual UP% : o quanto a forma de onda no instante de
pico ultrapassa o valor de regime estacionário, final, expresso como uma
porcentagem do valor de estado estacionário.
Tempo de assentamento, ST : tempo necessário para que as oscilações amor-
tecidas do regime transitório entrem e permaneçam no interior de uma faixa
de valores %2± em torno do valor de estado estacionário.
Tempo de subida, RT : tempo necessário para que a forma de onda vá de 0,1 a
0,9 do valor final.
Figura 2 – Especificações da resposta de segunda ordem subamortecida (NISE,
2002).

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
3
Cálculo de PT
O valor de PT é encontrado derivando-se ( )tc na Eq. (1) e obtendo o primeiro
instante de passagem por zero depois de 0=t .
Efetuando-se essa conta, obtém-se:
21 ζω
π
−=
n
PT. (2)
Cálculo de UP%
Com base na Figura 2, a ultrapassagem percentual, UP% é dada por:
100% max ×−
=final
final
ccc
UP . (3)
O termo maxc é obtido calculando-se o valor de ( )tc no instante de pico, ( )pTc .
Usando a Eq. (2) para pT e substituindo na Eq. (1), vem:
( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−−⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
−−
+=−−
−==22 11
2max 1cos1
11 ζ
ζπ
ζ
ζπ
φπζ
eeTcc P (4)
Pela resposta ao degrau, calculada na Eq. (1),
1=finalc . (5)
Substituindo as Equações (4) e (5) na Eq. (3), obtemos:
100%21 ×=⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−−
ζ
ζπ
eUP (6)
Observe que a ultrapassagem percentual é uma função somente da relação de
amortecimento ζ .
Enquanto a Eq. (6) permite que se calcule o valor de UP% dada a relação de
amortecimento ζ , o inverso da equação permite que se calcule o valor de ζ
dada a ultrapassagem porcentual UP% . O inverso é dado por:

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
4
⎟⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛−
=
100%ln
100%ln
22 UP
UP
πζ .
Um gráfico da Eq. (6) está mostrado na Figura 3.
Figura 3 – Ultrapassagem percentual em função da relação de amortecimento
(NISE, 2002).
Cálculo de ST
O tempo de assentamento é o tempo necessário para que a amplitude da se-
nóide amortecida na Eq. (1) alcance o valor 0,02, ou seja,
02,01
12=
−−
ζζω tne .
Resolvendo esta equação, obtemos:
( )n
STζω
ζ 2102,0ln −−= .
O numerador desta expressão varia de 3,91 a 4,74 à medida que ζ varia de 0
a 0,9. Assim, costuma-se usar a aproximação:
nST
ζω4
= . (7)

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
5
Cálculo de RT
O valor de RT em função de ζ só pode ser obtido numericamente. Estes re-
sultados são mostrados na Figura 4.
Figura 4 - Tempo de subida normalizado versus relação de amortecimento para
uma resposta de segunda ordem subamortecida (NISE, 2002).
Exercício
1. (NISE, 2002, p. 140) Dada a função de transferência:
( )10015
1002 ++
=ss
sG ,
obter PT , UP% , ST e RT .
Vimos na aula passada que os pólos do sistema de 2ª ordem subamortecidos
são:
12 −±−= ζωζω nns .
Esta localização dos pólos é mostrada na Figura 5.

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
6
Figura 5 - Diagrama de pólos de um sistema de segunda ordem subamortecido
(NISE, 2002).
Vemos, com base no Teorema de Pitágoras, que a distância radial da origem
ao pólo é a freqüência natural nω e ζθ =cos .
Comparando as equações (2) e (7) com a localização dos pólos, calculamos o
instante de pico e o tempo de assentamento em termos da localização dos pó-
los. Por conseguinte,
dn
PTωπ
ζω
π=
−=
21
dnST
σζω44
== ,
em que dω é a parte imaginária do pólo, chamada freqüência amortecida de os-
cilação e dσ é a magnitude da parte real do pólo, chamada freqüência exponen-
cial amortecida.
Exercícios
2. (NISE, 2002, p. 143) Dado o diagrama de pólos mostrado na Figura 6, de-
terminar ζ , nω , PT , UP% e ST .
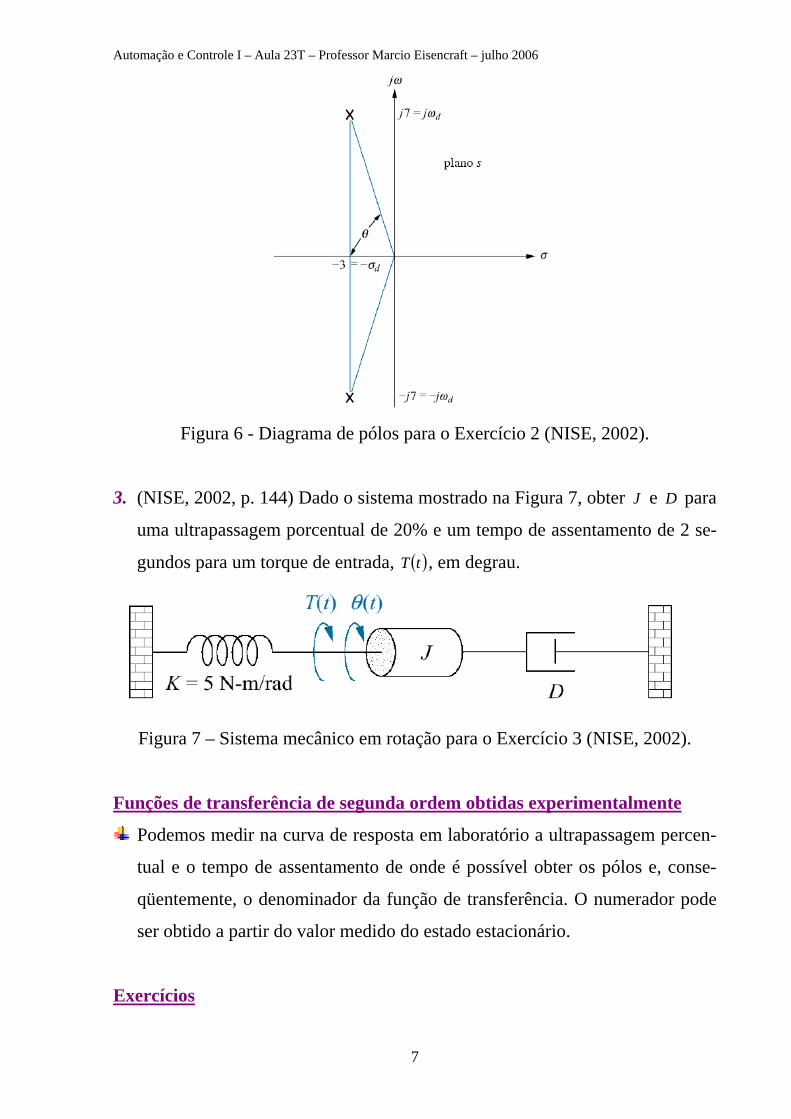
Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
7
Figura 6 - Diagrama de pólos para o Exercício 2 (NISE, 2002).
3. (NISE, 2002, p. 144) Dado o sistema mostrado na Figura 7, obter J e D para
uma ultrapassagem porcentual de 20% e um tempo de assentamento de 2 se-
gundos para um torque de entrada, ( )tT , em degrau.
Figura 7 – Sistema mecânico em rotação para o Exercício 3 (NISE, 2002).
Funções de transferência de segunda ordem obtidas experimentalmente
Podemos medir na curva de resposta em laboratório a ultrapassagem percen-
tual e o tempo de assentamento de onde é possível obter os pólos e, conse-
qüentemente, o denominador da função de transferência. O numerador pode
ser obtido a partir do valor medido do estado estacionário.
Exercícios

Automação e Controle I – Aula 23T – Professor Marcio Eisencraft – julho 2006
8
4. (NISE, 2002, p. 145) Obter ζ , nω , ST , PT , RT e UP% de um sistema cuja fun-
ção de transferência é:
( )36116
3612 ++
=ss
sG .
5. (NISE, 2002, p. 171) Determine a função de transferência de segunda ordem
que apresenta uma ultrapassagem de 12,3% e um tempo de assentamento de
1 segundo.

Automação e Controle I – Aula 24T – Professor Marcio Eisencraft – julho 2006
1
Aula 24T – Solução das equações de estado através da
transformada de Laplace Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 156-158.
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo: Prentice-Hall do Brasil, 2003.
788 p. ISBN 8587918230. Páginas 617-620.
4.10 Solução das equações de estado através da transformada de Laplace
No Capítulo 3, os sistemas foram modelados no espaço de estados, em que a
representação se constituiu em uma equação de estado e em uma equação de
saída.
Nessa aula, usaremos a transformada de Laplace para resolver as equações de
estado a fim de obter os vetores de estado e de saída.
Considere as equações de estado
A B= +x x u (1)
e de saída
C D= +x uy . (2)
Aplicando a transformada de Laplace a ambos os membros da equação de
estado, resulta
( ) ( ) ( ) ( )0s s A s B s− = +X x X U . (3)
Assim,
( ) ( ) ( ) ( )0sI A s B s− = +X U x (4)
e
( ) ( ) ( ) ( )10s sI A B s⎡ ⎤
⎢ ⎥⎣ ⎦
−= − +X x U (5)
ou
( )( )( )
( ) ( )0adj
detB s
sI AX s
sI A⎡ ⎤⎢ ⎥⎣ ⎦
+−
=−
x U . (6)

Automação e Controle I – Aula 24T – Professor Marcio Eisencraft – julho 2006
2
Aplicando a transformada de Laplace à equação de saída resulta
( ) ( ) ( )s C s D s= +Y X U . (7)
Autovalores e pólos da função de transferência
No caso em que o sistema é SISO (Single input single output) e as condições
iniciais são nulas, a função de transferência pode ser obtida substituindo-se (6)
em (7):
( )( )( )
( )
( )
( )
( ) ( )( )
adjdet
adj detdet
sI AY s C B DU s
sI A
C sI AB D sI AY sU s sI A
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
−= + ⇒
−
− + −=
−. (8)
Repare que os pólos da função de transferência, que determinam o compor-
tamento transitório são dados por
( )det 0sI A− = . (9)
As raízes de (9) em s são definidas como os autovalores de A .
Desta forma, os autovalores da matriz A fornecem os pólos do sistema.
Exercícios
1. (NISE, 2002, p. 173) Resolva a seguinte equação de estado e de saída para ( )y t em que ( )u t é o degrau unitário. Use o método da transformada de
Laplace.

Automação e Controle I – Aula 24T – Professor Marcio Eisencraft – julho 2006
3
( )
( )
2 0 1
1 1 1
10 1 ; 0
0
u t
y
−⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥− −⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
⎡ ⎤⎡ ⎤ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
x x
x x . (10)
(a) Resolva para ( )y t usando a transformada de Laplace.
(b) Obtenha os autovalores e os pólos do sistema.
2. (NISE, 2002, p. 158) Dado o sistema representado no espaço de estados pelas
equações:
( )
00 2
13 5
21 3 ; 0
1
te
y
−⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥− − ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
⎡ ⎤⎡ ⎤ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
x x
x x (11)
(a) Resolva para ( )y t usando a transformada de Laplace.
(b) Obtenha os autovalores e os pólos do sistema.
3. (NISE, 2002, p. 157) Dado o sistema representado no espaço de estados por:
( )
0 1 0 0
0 0 1 0
24 26 9 1
1
1 1 0 ; 0 0
2
te
y
−
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤= = ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
x x
x x (12)
(a) Resolva a equação de estados e obtenha a saída para a dada entrada exponen-
cial.
(b) Obtenha os autovalores e os pólos do sistema.

Automação e Controle I – Aula 25T – Professor Marcio Eisencraft – novembro 2006
1
Aula 25T – Estudos de casos – resposta a malha aberta Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 164-168.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo: Makron
Books, c1997. 558 p.: il. 24 cm ISBN 85-346-0596-3. Páginas 135-156.
4.8 Estudos de caso
Neste capítulo, fez-se uso das funções de transferência deduzidas no Capitulo
2 e das equações de estado deduzidas no Capítulo 3 para obter a resposta na
saída de um sistema a malha aberta. Mostrou-se também a importância dos
pólos de um sistema na determinação da resposta transitória.
O estudo de caso a seguir utiliza esses conceitos para analisar a malha aberta
do sistema de controle de posição de uma antena em azimute.
Exercícios
1. (NISE, 2002, p. 164) Para o diagrama esquemático do sistema de controle de
posição em azimute discutido na Aula 12T (configuração 1) e reproduzido na
Figura 1, suponha um sistema em malha aberta (canal de retroação desconec-
tado).
Figura 1 – Sistema de posicionamento em azimute (NISE; 2002).

Automação e Controle I – Aula 25T – Professor Marcio Eisencraft – novembro 2006
2
Faça o seguinte:
(a) prever, por inspeção, a forma da velocidade angular de saída a um degrau de
tensão na entrada do amplificador;
(b) encontrar a relação de amortecimento e a freqüência natural do sistema a ma-
lha aberta;
(c) deduzir a expressão analítica completa para a resposta da velocidade angular
da carga em malha aberta a um degrau de tensão na entrada do amplificador,
usando as funções de transferência;
(d) obter as equações de estado e de saída a malha aberta.
2. (NISE, 2002, p. 168) No mar, os navios são submetidos a movimento segun-
do o eixo de rolamento, como mostrado na Figura 2. Superfícies que se proje-
tam lateralmente, chamadas estabilizadores, são usadas para reduzir este mo-
vimento de rolamento. Os estabilizadores podem ser posicionados por um
sistema de controle a malha fechada que consiste em componentes como os
atuadores e sensores dos estabilizadores, bem como na dinâmica do rolamen-
to do navio. Admita que a dinâmica do rolamento, que relaciona o ângulo de
rolamento de saída, ( )sΘ , a um torque perturbador de entrada ( )DT s seja
( )
( ) 22,250,5 2,25D
sT s s sΘ
=+ +
. (1)
Figura 2 - Eixo de rolamento de uma embarcação (NISE, 2002).

Automação e Controle I – Aula 25T – Professor Marcio Eisencraft – novembro 2006
3
Faça o seguinte:
(a) determine a freqüência natural, a relação de amortecimento, o instante de pi-
co, o tempo de assentamento, o tempo de subida e a ultrapassagem percentual;
(b) determine a expressão analítica para a resposta da saída a um torque degrau
unitário na entrada.

Automação e Controle I – Aula 25T – Professor Marcio Eisencraft – novembro 2006
1
Aula 26T – Redução de sistemas múltiplos:
Associação em cascata e em paralelo Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 179-182.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 48-52.
CAPÍTULO 5 – REDUÇÃO DE DIAGRAMAS DE BLOCOS
Neste capítulo, aborda-se
Figura 1 - O ônibus espacial é constituído de diversos subsistemas. (NISE,
2002).

Automação e Controle I – Aula 25T – Professor Marcio Eisencraft – novembro 2006
2
Figura 2 – Componentes de um diagrama de blocos de um sistema linear invari-
ante no tempo (NISE, 2002).
Figura 3 – (a) Subsistemas em cascata; (b) função de transferência equivalente.
(NISE, 2002).

Automação e Controle I – Aula 25T – Professor Marcio Eisencraft – novembro 2006
3
Figura 4 - (a) Subsistemas em paralelo; (b) função de transferência equivalente.
(NISE, 2002).

Automação e Controle I – Aula 27T – Professor Marcio Eisencraft – novembro 2006
1
Aula 27T – Associação com retroação Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 182-189.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 48-52.
5.2.2 Associação com retroação
O sistema com retroação típico, descrito detalhadamente no Capítulo 1, está
mostrado na Figura 1(a); um modelo simplificado está mostrado na Figura
1(b).
Figura 1 - a. Sistemas de controle com retroação; b. modelo simplificado; c.
função de transferência equivalente (NISE, 2002).

Automação e Controle I – Aula 27T – Professor Marcio Eisencraft – novembro 2006
2
• Pensando em termos do modelo simplificado,
( ) ( ) ( ) ( )E s R s C s H s= ∓ . (1)
• Mas como ( ) ( ) ( )C s G s E s= ,
( )( )
( )
C sE s
G s= . (2)
• Substituindo a Eq. (2) na Eq. (1) e determinando a função de transferência ( )
( )( )e
C sG s
R s= , obtém-se a função de transferência equivalente, ou a malha
fechada, mostrada na Figura 1(c),
( )( )
( ) ( )1eG s
G sG s H s
=±
(3)
• O produto ( ) ( )G s H s na Eq. (3) é chamado de função de transferência a ma-
lha aberta ou ganho de malha.
5.2.3 Movendo blocos para criar formas conhecidas
• A Figura 2 mostra diagramas de blocos equivalentes formados ao se desloca-
rem funções de transferência à esquerda e à direita de uma junção somadora e
a Figura 3 mostra diagramas de blocos equivalentes formados ao se desloca-
rem funções de transferência à esquerda e à direita de um ponto de coleta do
sinal.
Exercícios
1. (NISE; 2002, p. 185) Reduzir o diagrama de blocos mostrado na Figura 4 a
uma única função de transferência.
2. (NISE; 2002, p. 221) Reduza o diagrama de blocos mostrado na Figura 5 a
uma única função de transferência ( )( )
( )
C sT s
R s= .
3. (NISE; 2002, p. 223) Para o sistema mostrado na Figura 6, determinar a saída
( )c t se a entrada ( )r t for um degrau unitário.

Automação e Controle I – Aula 27T – Professor Marcio Eisencraft – novembro 2006
3
Figura 2 - Álgebra de diagrama de blocos para junções de soma – formas equi-
valentes de deslocar um bloco a. à esquerda da junção somadora; b. à direita da
junção somadora (NISE, 2002).
4. (NISE; 2002, p. 223) Para o sistema mostrado na Figura 7, determinar a ul-
trapassagem percentual, o tempo de assentamento e o instante de pico para
uma entrada degrau se a resposta for subamortecida. (Será? Por quê?)
5. (NISE; 2002, p. 223) Para o sistema mostrado na Figura 8, determinar o valor
de k para o qual a resposta a um degrau unitário apresenta 20% de ultrapas-
sagem.
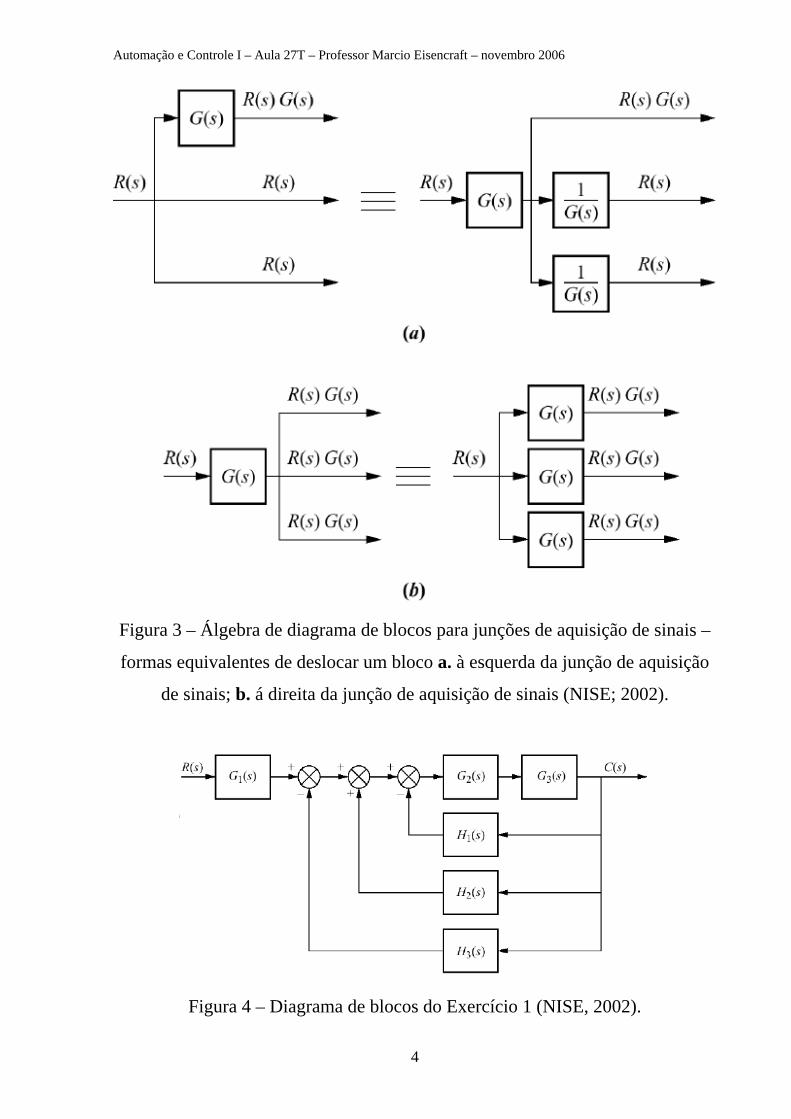
Automação e Controle I – Aula 27T – Professor Marcio Eisencraft – novembro 2006
4
Figura 3 – Álgebra de diagrama de blocos para junções de aquisição de sinais –
formas equivalentes de deslocar um bloco a. à esquerda da junção de aquisição
de sinais; b. á direita da junção de aquisição de sinais (NISE; 2002).
Figura 4 – Diagrama de blocos do Exercício 1 (NISE, 2002).

Automação e Controle I – Aula 27T – Professor Marcio Eisencraft – novembro 2006
5
Figura 5 – Diagrama de blocos do Exercício 2 (NISE, 2002).
Figura 6 – Diagrama de blocos do Exercício 3 (NISE, 2002).
Figura 7 – Diagrama de blocos do Exercício 4 (NISE, 2002).
Figura 8 – Diagrama de blocos do Exercício 5 (NISE, 2002).

Universidade Presbiteriana Mackenzie
Curso de Engenharia Eletrica
Automacao e Controle I
Laboratorio
Prof. Marcio Eisencraft
Segundo semestre de 2006

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
1
Aula 1P - Comandos básicos do Matlab aplicados a Automa-
ção e Controle Bibliografia
HAYKIN, Simon; VAN VEEN, Barry. Sinais e sistemas. Porto alegre: Bookman, 2001. 668 p. : il. (al-
gumas ISBN 8573077417). Páginas 71-76.
MITRA, Sanjit K. Digital signal processing : a computer-based approach. 2nd ed. Boston: McGraw-
Hill, c2001. 866 p. : il. ; 24 cm ISBN 0072321059.Páginas 70-76.
1. Introdução
O Matlab é uma ferramenta muito útil no estudo de problemas e no desenvolvimen-
to de projetos em Engenharia sendo utilizado em universidades e empresas ao redor do
mundo.
Na área de Engenharia de Produção e, mais precisamente, em projetos de Automa-
ção e Controle vem adquirindo um caráter quase fundamental.
O principal motivo deste sucesso é a utilização maciça de vetores e matrizes para
representar dados de uma forma simples (Matlab = Matrix Laboratory). Esta forma de re-
presentação praticamente elimina a necessidade de utilização de laços FOR ou WHILE
simplificando e acelerando muito os programas. EM OUTRAS PALAVRAS, EM MA-
TLAB, SEMPRE QUE POSSÍVEL (OU SEJA, QUASE SEMPRE!) NÃO UTILIZE LA-
ÇOS FOR OU WHILE!
O objetivo desta aula é (re) ver alguns conceitos básicos de programação em Ma-
tlab. Durante o curso veremos muitos outros detalhes técnicos.
Lembre-se: sempre que você ficar na dúvida sobre a utilização de um comando, a
função <help comando> pode lhe ajudar.
2. Gerando vetores
2.1. O operador :
O operador : é utilizado para gerar e acessar elementos de um vetor.
Vetor = valor inicial: passo: valor final
Quando o passo é unitário, ele pode ser omitido.
• Exemplos de utilização

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
2
a. gerar um vetor x com os números inteiros de zero a cinco
>> x = 0:5
x =
0 1 2 3 4 5
b. gerar um vetor y indo de 0 a 1 com passo de 0.1.
>> y = 0:0.1:1
y =
0 0.1000 0.2000 0.3000 0.4000 0.5000
0.6000 0.7000 0.8000 0.9000 1.0000
c. mostrar o segundo elemento do vetor x
>> x(2)
ans =
1
Exercício
1. Gerar um vetor x de números pares de 0 a 50.
Comandos:
2.2. A função linspace
A função linspace é uma forma prática de se gerar vetores quando sabemos
quantos pontos ele deve ter.
Vetor = linspace (valor inicial, valor final, no. de pontos)
• Exemplos de utilização
a. Gere um vetor de 1000 pontos com valores entre zero e 1igualmente espaçados.
>> v = linspace(0,1,1000);
b. Repita o exercício anterior, mas com os valores em ordem decrescente.
>> v = linspace(1,0,1000);

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
3
Exercício
2. Gere um vetor x de 5000 pontos com valores entre 0 e 2*pi.
Comandos:
2.3. Vetores especiais
Existem vetores pré-definidos pelo Matlab e que são muito úteis. Dois deles são o
ones(num.linhas, num.colunas) e o zeros(num.linhas,
num.colunas) que geram, como os nomes dizem, vetores constituídos de uns e de zeros
respectivamente.
• Exemplos de aplicação
a. Gere um vetor constituído de 10 zeros.
>> x = zeros(1,10)
x =
0 0 0 0 0 0 0 0 0 0
b. Gere um vetor constituído por 5000 uns.
>> y = ones(1,5000);
Exercício
3. Gere uma matriz 2x2 constituída por zeros.
Comandos:
2.4. Concatenação de vetores
Uma ferramenta muito interessante do Matlab é a possibilidade de combinar vetores
para formar outros (concatenar vetores). Veja os seguintes exemplos.
• Exemplos de aplicação:
a. Gere um vetor de cinco zeros seguidos por cinco uns.
>> vector = [zeros(1,5) ones(1,5)]
vector =
0 0 0 0 0 1 1 1 1 1

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
4
b. Gere um vetor contendo os números inteiros entre zero e 10 em ordem crescente segui-
dos pelos mesmos em ordem decrescente.
>> x = [0:10 10:-1:0]
x =
0 1 2 3 4 5 6 7 8 9 10
10 9 8 7 6 5 4 3 2 1 0
Exercício
4. Construa um vetor constituído pelos números pares de 0 a 10 seguido pelos números
ímpares de 0 a 10.
Comandos:
2.5. Operações entre vetores
O Matlab permite somar (+), subtrair (-), multiplicar (.*) , dividir (./) vetores. Essas
operações são realizadas elemento a elemento e só podem ser aplicadas entre vetores de
mesmo comprimento.
Além disso, quase todas as suas funções (trigonométricas, exponenciais e outras)
podem ser aplicadas a um vetor sendo que elas operam também elemento a elemento.
• Exemplos de aplicação
a. Sendo x = [2 3 7] e y = [0 -1 3] escreva a resposta de cada um desses co-
mandos executados no Matlab.
I) x + y [2 2 10]
ii) x – y [2 4 4]
iii) x.*y [0 -3 21]
b. Como gerar a partir do vetor x = 0:0.001:1 um vetor com números de 1 a 11?
V = 10*x+1

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
5
Exercício
5. Sendo x = [2.1 -2 3] e y = [0 -1 3], escreva o vetor resultante das seguin-
tes operações:
i) x+y ii) x-y iii) 3*x iv) x.*y
v) x./y vi) y./x vii) y.^2 viii) x.^y
Respostas:
3. Gráficos
Uma outra característica muito interessante do Matlab para um engenheiro é a faci-
lidade de se construir gráficos complicados com ele de uma maneira muito simples. O co-
mando mais utilizado é: plot(vetor.abscissa, vetor.ordenada, ‘modo’);
O comando plot traça um gráfico colocando seu primeiro argumento no eixo hori-
zontal e seu segundo argumento no eixo vertical. A “string” ‘modo’ indica a forma como o
gráfico será traçado. Veja help plot para mais detalhes.
Stem traça um gráfico da seqüência em seu segundo argumento como palitos com
círculos no valor dos dados usando seu primeiro argumento como abscissa. Veja os exem-
plos.
• Exemplo de aplicação
a. Faça um gráfico da função )sin(xy = para [ ]π4,0∈x
>> x = linspace(0,4*pi,5000);
>> y = sin(x);
>> plot(x,y)

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
6
Alguns comandos interessantes:
I) grid – coloca linhas de grade no gráfico
ii) title – permite acrescentar um título ao gráfico
iii) xlabel - permite acrescentar um título no eixo das abscissas
iv) ylabel - permite acrescentar um título no eixo das ordenadas
v) hold on – não apaga o gráfico atual antes de fazer o seguinte
Exercícios
6. Faça um gráfico de ( ) ( )2sin xxy = e ( ) ( )2cos xxz = para [ ]ππ 4,4−∈x na mesma figu-
ra. O gráfico de ( )xy deverá ficar em azul e o de ( )xz em vermelho.
Comandos:

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
7
4. Scripts
Até este ponto, todas as nossas interações com o Matlab têm sido através da linha de
comando. Entramos comandos ou funções na linha de comando e o Matlab interpreta
nossa entrada e toma a ação apropriada. Este é o modo de operação preferencial quando
nossa sessão de trabalho é curta e não repetitiva.
No entanto, o real poder do Matlab para análise e projeto de sistemas vêm da sua habi-
lidade de executar uma longa seqüência de comandos armazenados num arquivo. Estes
arquivos são chamados de arquivos-M porque seus nomes têm a forma nomearq.m.
Um script é um tipo de arquivo-M. Scripts são arquivos-textos comuns e podem ser
criados usando um editor de texto.
Um script é uma seqüência de comandos e funções comuns usados na linha de coman-
do. Uma vez criado, ele é invocado na linha de comando digitando-se o nome do arqui-
vo. Quando isso ocorre, o Matlab executa os comandos e funções no arquivo como se
eles tivessem sido digitados diretamente na linha de comando.
Suponha por exemplo que desejemos fazer um gráfico da função ( ) tty αsin= em que
α é uma variável que queremos variar.
Usando o editor de texto do Matlab (basta ditar edit na linha de comando), podemos
escrever um script chamado plotdata.m como mostrado a seguir. % Este e um script para fazer um grafico da funcao y = sin(alfa*t)
% O valor de alfa precisa existir no espaco de trabalho antes
% de se chamar este script
t = 0:0.01:1;
y = sin(alfa*t);
plot(t,y);
xlabel ('tempo(s)');
ylabel('y(t) = sin(\alpha t)');
grid on;
É importante salvar o scritpt no mesmo diretório em que se está trabalhando na linha de
comando. Caso contrário, ao tentar executar o script o Matlab não encontrará o arquivo
e exibirá uma mensagem de erro. Este erro é muito comum quando estamos começando
a trabalhar com scripts.
Uma vez digitado e salvo é muito fácil utilizar o script. Veja os exemplos a seguir:

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
8
>> alfa = 50;
>> plotdata
>> alfa = 10;
>> plotdata
Ao escrever scripts é sempre interessante utilizar comentários, linhas que começam
com %. Se você escrever linhas de comentário antes do começo das instruções do script
ao utilizar o comando help nomearq o Matlab apresenta estas linhas na tela. Por
exemplo, >> help plotdata
Este e um script para fazer um grafico da funcao y = sin(alfa*t)
O valor de alfa precisa existir no espaco de trabalho antes
de se chamar este script
5. Funções
Assim como os scripts, as funções definidas pelo usuário estão entre os recursos mais
importantes e utilizados do Matlab. Uma função é um script que recebe um ou mais pa-
râmetros do teclado e pode devolver um ou mais parâmetros ou executar uma tarefa.

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
9
O formato de uma função no Matlab é o seguinte
function [outarg1, outarg2,...] = fname(inarg1, inarg2,...)
% Um comentário
% Mais um comentário
....
(código executável)
....
fname é o nome da função criada e deve ser o nome do arquivo m em que foi gravado
o arquivo. inarg1, inarg2,... são os argumentos de entrada e outarg1,
outarg2,... são os argumentos de saída.
A seguir damos um exemplo bastante simples de função. A função somateste recebe
dois argumentos a, b e retorna a soma deles.
function res = somateste(a,b);
%Funcao para somar dois numeros a e b
res = a+b;
Uma vez que você tenha salvado este arquivo como somateste no diretório corrente,
você pode usá-lo como nos exemplos a seguir:
>> somateste(2, 4)
ans =
6
>> a = 5;
>> b = -3;
>> res = somateste(a,b)
res =
2
Exercícios
7. Reescreva o script plotdata visto acima de forma que ele seja uma função que rece-
be a variável alfa. Ou seja, escreva uma função que faça um gráfico da função
( ) tty αsin= no intervalo 10 ≤≤ t e α é um parâmetro escolhido pelo usuário. Por e-
xemplo, o comando:

Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
10
>> plotdada(50)
deve gerar o gráfico
Resposta (listagem):
8. Sendo o vetor a = [0 1 5 2.4 7 1000], escreva os elementos dos seguintes
vetores:
i) x = a(5:-1:2) ii) y = a(1:4)
iii) z = a(2:2:4) iv) w = a(3)
Respostas:
9. Gere um vetor constituído de 100 elementos iguais a cinco.
Comandos:
10. (1032) Escreva uma função Matlab chamada pulso2graf cujas entradas sejam dois
números inteiros a e b com ba < . A função deverá fazer o gráfico de um pulso com
amplitude 2 no intervalo bna ≤≤ . O gráfico deve começar em 2−a e terminar em
2+b .
Por exemplo, ao digitarmos:
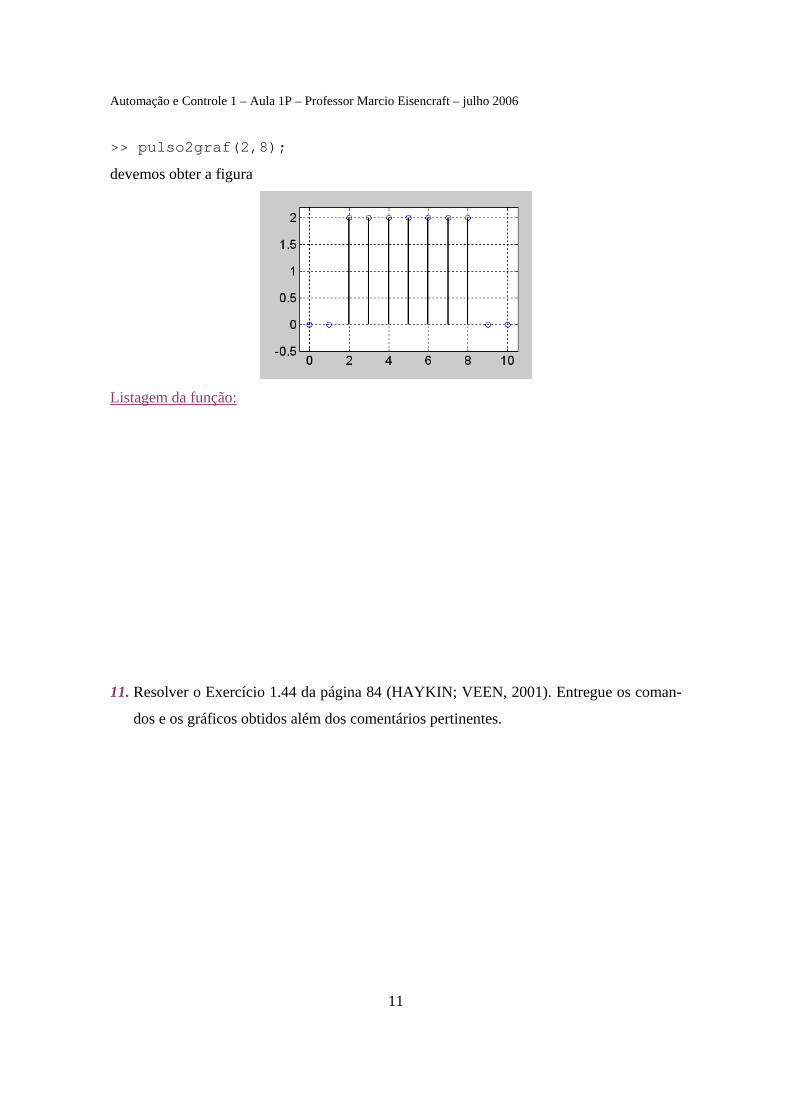
Automação e Controle 1 – Aula 1P – Professor Marcio Eisencraft – julho 2006
11
>> pulso2graf(2,8);
devemos obter a figura
Listagem da função:
11. Resolver o Exercício 1.44 da página 84 (HAYKIN; VEEN, 2001). Entregue os coman-
dos e os gráficos obtidos além dos comentários pertinentes.

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
1
Aula 2P – Exemplos práticos de sistemas de Automação e
Controle Bibliografia
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 1-14.
Manual for Model 730 – Magnetic Levitation System, ECP, 1999.
O objetivo desta aula é fazer o aluno entrar em contato com alguns sistemas de controle sim-
ples. Serão analisados quatro sistemas:
Pêndulo invertido (Simulink)
Sistema massa-mola (Simulink)
Controle de nível num vazo sanitário (Simulink)
Levitador Magnético (kit didático)
1. Pêndulo invertido (Simulink)
Esse sistema ilustra um pêndulo colocado sobre um carrinho que pode ser deslocado com
o cursor.
Para começar a simulação, basta digitar penddemo na linha de comando do Matlab. De-
verá ser aberto um diagrama do Simulink como o mostrado a seguir.
Para iniciar a simulação do pêndulo, clique em “Start Simulation” na barra de ferra-
mentas.
Deve-se abrir uma janela em que você pode visualizar o pêndulo.

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
2
Puxando o cursor com o mouse, verifique o comportamento do pêndulo. Descreva abai-
xo.
Resposta:
A seguir mude o valor do ganho proporcional (circundado abaixo – basta clicar duas ve-
zes nele) de -9,4 para -2 e simule novamente. Verifique o que ocorre.
Resposta:

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
3
2. Sistema massa-mola (Simulink)
Esse sistema simula o comportamento de duas massas ligadas por uma mola sendo este
conjunto submetido a uma força excitadora.
Para dar início à simulação, basta digitar dblcart1 na linha de comando do Matlab.
Deverá ser aberto um diagrama do Simulink como o mostrado a seguir.
Para iniciar a simulação do sistema massa-mola, clique em “Start Simulation” na
barra de ferramentas.
Deve-se abrir uma janela em que você pode visualizar o sistema.
Ao clicar com o mouse na caixa “Actual Position” é mostrada a entrada e a posição do
sistema massa-mola. O que você pôde observar?

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
4
Resposta:
Clicando no gerador de sinais é possível mudar a amplitude, a freqüência e a forma de
onda aplicada. Tente utilizar a forma aleatória (random) e dente de serra (sawtooth), si-
mule novamente e escreva o que ocorre. Até que valor de amplitude ainda é possível ver
os bloquinhos na tela?
Resposta:

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
5
3. Controle de nível de um vaso sanitário (Simulink)
Esse sistema simula a descarga em um vaso sanitário.
Para dar início à simulação, basta digitar toilet na linha de comando do Matlab. Deve-
rá ser aberto um diagrama do Simulink juntamente com um modelo GUI mostrados a se-
guir.
Pressione Start Sim e dê a descarga (FLUSH) algumas vezes. A seguir clique em
Stop Sim. Serão mostradas a seguir quatro curvas. Explique cada uma delas a seguir.
Resposta:
4. Levitador magnético
O levitador magnético é composto por duas bobinas, uma inferior e outra superior que
geram um campo magnético pela passagem de uma corrente. Essas bobinas interagem a-

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
6
través do campo com um ou dois discos magnéticos que se deslocam em uma barra de vi-
dro que serve como guia.
Variando-se a magnitude da corrente na bobina inferior, pode-se controlar a posição do
magneto inferior fazendo-o levitar através de uma força magnética repulsiva. Similarmen-
te, o magneto superior é posicionado através de uma força magnética de atração, adotan-
do-se um valor adequado de corrente na bobina superior. Com a proximidade dos discos
surge também interação magnética (força de repulsão) entre os dois magnetos.
Dois sensores ópticos baseados em sensores de laser são utilizados para medir a posição
dos magnetos.
Figura 1 - Diagrama do levitador magnético (ECP, 1999).
O diagrama esquemático de um sistema ECP (Educational Control Products) completo é
mostrado na Figura 2.
Para o sistema Dispositivo de Levitação Magnética, a informação sobre a posição é forne-
cida pelo medidor óptico. A placa DSP é capaz de interpretar comandos de trajetórias e
realizar verificações em variáveis com o objetivo de garantir a segurança na operação do
equipamento.
O acionamento é feito por um sistema eletrônico de potência que gera o sinal de corrente
adequado para a bobina.

Automação e Controle 1 – Aula 2P – Professor Marcio Eisencraft – julho 2006
7
Figura 2 – Diagrama completo de um sistema ECP (ECP, 1999).
O terceiro elemento que compõe e finaliza todos os sistemas ECP é o programa executivo
que roda no PC e dispõe de uma interface gráfica a base de menus, que permite operar o
sistema com facilidade. Ele dá suporte à definição de trajetórias, aquisição de dados, visu-
alização de curvas, especificação de controladores, execução de comandos do sistema, etc.
Observe atentamente a demonstração do equipamento a ser feita pelo professor e anote
tudo que considerar relevante.
Anotações:
Exercício
1. (1052) Resolver Exercício 1.10 da página 32 do (SILVEIRA; SANTOS, 1999).

Automação e Controle 1 – Aula 3P – Professor Marcio Eisencraft – julho 2006
1
Aula 3P – Simulação computacional de sistemas contínuos –
(1ª parte) Bibliografia
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo: Prentice-Hall do Brasil, 2003. 788 p.
ISBN 8587918230. Páginas 31-34.
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 607-610.
O objetivo desta aula é aprender a trabalhar com funções de transferência no Matlab através de
exemplos. É interessante que você execute cada um dos exercícios a seguir interpretando seus
resultados. Esta aula, juntamente com a da próxima semana são fundamentais para o restante do
curso.
1. (NISE, 2002; p. 607) Cadeias de caracteres são representadas no Matlab por texto entre após-
trofos como ‘ab’. Os comentários começam com % e são ignorados pelo Matlab. Os núme-
ros são digitados sem quaisquer outros caracteres. As operações aritméticas são executadas
utilizando os operadores adequados. Os números podem ser atribuídos a variáveis usando um
argumento à esquerda e um sinal de igualdade. Digite a seguinte seqüência de comandos e
complete os espaços com os resultados do Matlab. Certifique-se que entendeu o seu signifi-
cado. >> '(cap2p1)' % Exibe título.
>> 'Como vai você?' % Exibe uma cadeia de caracteres.
>> -3.96 % Exibe o número real -3,96.
>> -4+7i % Exibe o número complexo -4+7i.
>> -5-6j % Exibe o número complexo -5-6i.
>> (-4+7i)+(-5-6i) % Adiciona os números complexos e
___________________ % Exibe a soma.
(-4+7j)*(-5-6j) % Multiplica os dois números complexos e
___________________ % Exibe o produto.
>> M=5 % Atribui o valor 5 a M e exibe o resultado.
>> N=6 % Atribui o valor 6 a N e exibe o resultado.
>> P=M+N %Atribui o valor M+N a P exibe o resultado.
___________________
Automação e Controle 1 – Aula 3P – Professor Marcio Eisencraft – julho 2006
2
2. (NISE, 2002; p. 607) Os polinômios em s podem ser representados por vetores linha conten-
do os coeficientes. Deste modo, 2337 231 +−+= sssP pode ser representado pelo vetor
mostrado a seguir, com os elementos separados por um espaço ou uma vírgula. >> P1=[1 7 -3 23] % Armazena o polinômio s^3 + 7s^2 -3s + 23
Qual seria o comando para armazenar o polinômio 75,4 2452 ++−= sssP ?
Resposta:
3. (NISE, 2002; p. 607) A execução das instruções anteriores faz com que o Matlab exiba os
resultados na tela. A digitação de um comando com um ponto-e-vírgula suprime a exibição na
tela. Digitando-se uma expressão sem atribuição à esquerda e sem o ponto-e-vírgula faz com
que a expressão seja calculada e o resultado, exibido na tela. Digite P2 na tela Matlab Com-
mand Window após a execução e verifique o resultado. >> P2=[3 5 7 8]; % Atribui P2
% sem mostrar na tela.
>> 3*5 % Calcula 3*5 e mostra o resultado.
Qual o polinômio atribuído a P2?
Resposta:
4. (NISE, 2002; p. 607) Uma ( )sF fatorada pode ser representada sob a forma de polinômio.
Assim, ( )( )( )6523 +++= sssP pode ser transformado em polinômio através do comando
poly(V), onde V é um vetor linha contendo as raízes do polinômio e poly(V) forma os
coeficientes do polinômio. >> P3=poly([-2 -5 -6]) % Armazena o polinômio
>> % (s+2)(s+5)(s+6) como P3
Escreva os coeficientes do polinômio 3P .
Resposta:
5. (NISE, 2002; p. 607) Podemos determinar as raízes de polinômios usando o comando ro-
ots(V). As raízes vêm na forma de um vetor coluna. Por exemplo, obtenha as raízes de
23975 234 +−++ ssss . >>P4=[5 7 9 -3 2] % Forma 5s^4+7s^3+9s^2-3s+2 e

Automação e Controle 1 – Aula 3P – Professor Marcio Eisencraft – julho 2006
3
% exibe o resultado.
>> raizes_P4=roots(P4) % Acha as raízes de 5s^4+7s^3+9s^2-3s+2.
Calcule as raízes de ( ) 107 23 ++= sssP .
Resposta:
6. (NISE, 2002; p. 607) Os polinômios podem ser multiplicados entre si usando o comando
conv(a,b). Assim, ( )( )126391075 23423 +++−+++= sssssssP é gerado como a se-
guir: >> P5=conv([1 7 10 9],[1 -3 6 2 1])
Obtenha o polinômio resultante da multiplicação ( )9243)1( 232 −+++ ssss .
Resposta:
Expansão em frações parciais no Matlab.
Considere a seguinte função ( )( )sAsB :
( )( ) n
nnn
nn
asasbsbsb
dennum
sAsB
++++++
== −
−
11
110
em que alguns dos ia e jb podem ser nulos. No Matlab, os vetores linha num e den são forma-
dos pelos coeficientes do numerador e do denominador da função de transferência. Ou seja,
num = [b0 b1 … bn]
den = [1 a1 a2 … an]
O comando
[r,p,k] = residue(num,den)
determina os resíduos (r), os pólos (p) e o termo direto (k) da expansão em frações parciais da
relação entre os polinômios ( )sB e ( )sA .
A expansão em frações parciais de ( )( )sAsB é dada por:
( )( )
( )( )
( )( )
( )( ) ( )sknps
nrps
rps
rsAsB
+−
++−
+−
=2
21
1
Por exemplo, considere a seguinte função de transferência:

Automação e Controle 1 – Aula 3P – Professor Marcio Eisencraft – julho 2006
4
( )( ) 6116
635223
23
++++++
=ssssss
sAsB .
Para essa função, >> num = [2 5 3 6];
>> den = [1 6 11 6];
O comando
[r,p,k] = residue(num, den)
apresenta o seguinte resultado: >> [r,p,k] = residue(num, den)
r =
-6.00000000000000
-4.00000000000002
3.00000000000001
p =
-3.00000000000000
-2.00000000000000
-1.00000000000000
k =
2
Essa é a representação em Matlab da seguinte expansão em frações parciais de ( )( )sAsB :
( )( ) 2
13
24
36
61166352
23
23
++
++−
++−
=++++++
=ssssss
ssssAsB
O comando residue pode ser também utilizado para formar os polinômios (numerador e de-
nominador) a partir de suas expansões parciais em frações. Ou seja, o comando:
[num, den] = residue(r,p,k)
em que r, p e k foram fornecidos previamente pelo Matlab, convertendo de volta a expansão em
frações parciais para a relação polinomial, como se segue: >> [num, den] = residue(r, p, k);
>> printsys(num, den, 's')
num/den =
2 s^3 + 5 s^2 + 3 s + 6
-----------------------
s^3 + 6 s^2 + 11 s + 6
O comando

Automação e Controle 1 – Aula 3P – Professor Marcio Eisencraft – julho 2006
5
printsys(num, den, ‘s’);
apresenta o num/den em termos da relação polinomial em s.
Note que, se ( ) ( ) ( )11 −+==+= mjpjpjp , o pólo ( )jp é um pólo de multiplicidade m .
Nestes casos, a expansão inclui termos como se segue:
( )( )
( )( )[ ]
( )( )[ ]mjpsmjr
jpsjr
jpsjr
−−+
++−
++
−11
2 .
7. (OGATA, 2003; p. 32) Expanda a seguinte ( )( )sAsB em frações parciais com Matlab:
( )( ) ( ) 133
321
3223
2
3
2
+++++
=+
++=
sssss
sss
sAsB .
Comandos e resposta:

Automação e Controle 1 – Aula 3P – Professor Marcio Eisencraft – julho 2006
6
8. (OGATA, 2003; p. 44) Considere a seguinte função:
( )3046216
30965234
234
++++++++
=ssss
sssssF .
Utilizando o Matlab, obtenha a expansão em frações parciais de ( )sF . Em seguida, determine a
transformada de Laplace inversa de ( )sF .
Comandos e Resposta:
9. Resolver Exercício 14 da página 82 do (NISE, 2002).

Automação e Controle 1 – Aula 4P – Professor Marcio Eisencraft – julho 2006
1
Aula 4P – Simulação computacional de sistemas contínuos –
(2ª parte) Bibliografia
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 63-76.
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 607-610.
1. (NISE, 2002, p. 608) Criando Funções de Transferência.
Método Vetorial, Forma Polinomial:
Uma função de transferência pode ser expressa como um polinômio em numerador dividido por
um polinômio em denominador, isto é, F(s) = N(s)/D(s). O numerador, N(s), é representado por
um vetor linha, numf, que contém os coeficientes de N(s). De modo semelhante, o denominador,
D(s), é representado por um vetor linha, denf, que contém os coeficientes de D(s). Formamos
F(s) com o comando
F = tf(numf,denf).
F é chamado um objeto linear e invariante no tempo (LIT). Este objeto, ou função de transferên-
cia, pode ser usado como uma entidade em outras operações, como adição ou multiplicação.
Mostramos isto com ( ) ( ) ( )[ ]4572150 22 ++++= ssssssF . Observe que ao executar o comando
tf, o MATLAB imprime, na tela, a função de transferência.
>> numf=150*[1 2 7] % Armazena 150(s^2+2s+7) em numf e
% mostra o resultado.
>> denf=[1 5 4 0] % Armazena s(s+1)(s+4) em denf e
% mostra o resultado na tela.
>> F=tf(numf,denf) % Forma F(s) e mostra o resultado.
Método Vetorial, Forma Fatorada:
Também podemos criar funções de transferência LIT se o numerador e o denominador estiverem
representados na forma fatorada. Fazemos isto usando os vetores linha que contêm as raízes do
numerador e do denominador. Assim, G(s) = K*N(s)/D(s) pode ser expresso como um objeto
LIT, usando o comando:
G = zpk(numg,deng,K),

Automação e Controle 1 – Aula 4P – Professor Marcio Eisencraft – julho 2006
2
em que numg é um vetor linha contendo as raízes de N(s) e deng é um vetor linha contendo as
raízes de D(s). A expressão zpk significa zeros (raízes do numerador), pólos (raízes do denomi-
nador) e ganho, K. Mostramos isto com ( ) ( )( ) ( )( )( )[ ]9874220 +++++= ssssssG . Observe que
ao executar o comando zpk, o MATLAB imprime, na tela, a função de transferência.
>> numg=[-2 -4] % Armazena (s+2)(s+4) em numg e
% mostra o resultado.
>> deng=[-7 -8 -9] % Armazena (s+7)(s+8)(s+9) em deng e
% mostra o resultado.
>> K=20 % Define K.
>> G=zpk(numg,deng,K) % Forma G(s) e mostra o resultado.
Método da Expressão Racional em s, Forma Polinomial:
Este método permite que você digite a função de transferência como a escreveria normalmente. A
instrução s = tf('s') deve preceder a função de transferência se você quiser criar uma fun-
ção de transferência LIT na forma polinomial equivalente usando G = tf(numg,deng).
>> s=tf('s') % Define 's' como um objeto LTI em
% forma polinomial.
>> F=150*(s^2+2*s+7)/[s*(s^2+5*s+4)]
% Forma F(s) como uma função de
% transferência LTI em forma polino-
% mial.
>> G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)]
% Forma G(s) como uma função de
% transferência LTI em forma polino-
% mial.
Método da Expressão Racional em s, Forma Fatorada.
Este método permite que você digite a função de transferência como a escreveria normalmente. A
instrução s = zpk('s') deve preceder a função de transferência se você quiser criar uma
função de transferência LIT na forma fatorada equivalente usando G = zpk(numg,deng,K).
Em ambos os métodos da expressão racional a função de transferência pode ser digitada sob
qualquer forma independentemente de se usar s = tf('s') ou s = zpk('s'). A diferen-
Automação e Controle 1 – Aula 4P – Professor Marcio Eisencraft – julho 2006
3
ça está na função de transferência LIT criada. Usamos os mesmos exemplos anteriores para de-
monstrar os métodos da expressão racional em s.
>> s=zpk('s') % Define 's' como um objeto LTI em
% forma fatorada.
>> F=150*(s^2+2*s+7)/[s*(s^2+5*s+4)]
% Forma F(s) como uma função de transferência
% LTI em forma fatorada.
>> G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)]
%Forma G(s) como uma função de transferência
% LTI em forma fatorada.
2. (NISE, 2002; p. 82) Use o Matlab para gerar a seguinte função de transferência:
( ) ( )( )( )( )( )( )( )52275630555
722615522 ++++++
+++=
sssssssssssG
nas seguintes formas:
(a) relação de fatores;
(b) relação de polinômios
Comandos utilizados:
3. (NISE, 2002; p. 609) Os vetores do numerador e do denominador da função de transferência
podem ser convertidos para a forma polinomial contendo os coeficientes e para a forma fato-
rada contendo as raízes. A função MATLAB, tf2zp(numtf,dentf), converte os coefi-
cientes do numerador e do denominador em raízes. Os resultados estão na forma de vetores
coluna. Mostramos isto com F(s) = (10s^2 + 40s + 60)/(s^3 + 4s^2 +5s + 7).
>> numftf=[10 40 60] % Forma o numerador de F(s) =
% (10s^2+40s+60)/(s^3+4s^2+5s+7).
>> denftf=[1 4 5 7] % Forma o denominador de F(s) =
% (10s^2+40s+60)/(s^3+4s^2+5s+7).

Automação e Controle 1 – Aula 4P – Professor Marcio Eisencraft – julho 2006
4
>> [numfzp,denfzp]=tf2zp(numftf,denftf)
% Converte F(s) para a forma fatorada.
A função MATLAB zp2tf(numzp,denzp,K) transforma as raízes do numerador e do de-
nominador em coeficientes. Os argumentos numzp e denzp devem ser vetores coluna. Na de-
monstração a seguir, o sinal de apóstrofo significa o vetor transposto. Vamos mostrar a conversão
de raízes em coeficientes com G(s) = 10(s + 2)(s + 4)/[s(s + 3)(s + 5)].
>> numgzp=[-2 -4] % Forma o numerador de
>> K=10 % G(s) = 10(s+2)(s+4)/[s(s+3)(s+5)].
>> dengzp=[0 -3 -5] % Forma o denominador de
% G(s) = 10(s+2)(s+4)/[s(s+3)(s+5)].
>> [numgtf,dengtf]=zp2tf(numgzp',dengzp',K)
% Converte G(s) para a forma polinomial.
4. (NISE, 2002; p. 82) Repita o problema 2 para a seguinte função de transferência:
( )503537913
421520252345
234
+++++++++
=sssss
sssssF .
Comandos utilizados:
5. (NISE, 2002; p. 609) Modelos LIT também podem ser convertidos entre a forma polinomial e
fatorada. Os comandos MATLAB tf e zpk também são usados para conversão entre mode-
los LIT. Se a função de transferência, Fzpk(s), for expressa como fatores em numerador e de-
nominador, então tf(Fzpk) converte Fzpk(s) em uma função de transferência expressa a-
través dos coeficientes do numerador e do denominador. De modo semelhante, se uma função
de transferência, Ftf(s), for expressa através dos coeficientes do numerador e do denomina-
dor, então zpk(Ftf) converte Ftf(s) em uma função de transferência expressa através dos
fatores de numerador e de denominador. O seguinte exemplo mostra os conceitos.

Automação e Controle 1 – Aula 4P – Professor Marcio Eisencraft – julho 2006
5
>> Fzpk1=zpk([-2 -4],[0 -3 -5],10) % Forma Fzpk1(s)=
%10(s+2)(s+4)/[s(s+3)(s+5)].
>> Ftf1=tf(Fzpk1) % Converte Fzpk1(s) à
% forma de coeficientes.
>>Ftf2=tf([10 40 60],[1 4 5 7]) % Forma Ftf2(s)=
% (10s^2+40s+60)/(s^3+4s^2+5s+7).
>> Fzpk2=zpk(Ftf2) % Converte Ftf2(s) à
% forma fatorada.
6. (DORF; BISHOP, 2001, p. 76) Uma impressora utiliza um feixe de laser para imprimir rapi-
damente cópias para um computador. O laser é posicionado por um sinal de controle de en-
trada, ( )tr , tal que:
( ) ( ) ( )sRss
ssY50060
10052 ++
+= .
A entrada ( )tr representa a posição desejada do feixe de laser.
(a) Determine a saída ( )ty quando ( )tr for um degrau unitário de entrada.
(b) Qual o valor final de ( )ty ?
(c) Usando o Matlab, gere um gráfico de ( )ty para 10 ≤≤ t segundo.
Resolução (use o verso também):

Automação e Controle 1 – Aula 4P – Professor Marcio Eisencraft – julho 2006
6
7. O comando step(sys, Tfinal) gera um gráfico da resposta ao degrau para um sistema
sys no intervalo FINALTt ≤≤0 . Sendo assim, use o Matlab para gerar diretamente a resposta
ao degrau do exercício anterior (faça em outra figura para não apagar a anterior) e compare
com o resultado obtido na letra (c) do Exercício 6.
Comandos utilizados e comparação.
8. (DORF; BISHOP, 2001, p. 76) A função de transferência de um sistema é:
( )( )
( )158
2102 ++
+=
sss
sRsY
.
Determine algebricamente e faça um gráfico de ( )ty quando ( )tr for um degrau unitário de en-
trada. Confira seu resultado com o comando step.
Resolução:
9. (1061) Resolver Exercício PM2.4 da página 91 do (DORF; BISHOP, 1998).

Automação e Controle 1 – Aula 5P – Professor Marcio Eisencraft – julho 2006
1
Aula 5P – Aula de Exercícios para P1 Bibliografia
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 1-92.
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 1-88.
1. (DORF; BISHOP, 2001, p. 22) Um exemplo comum de sistema de controle com duas entra-
das é um chuveiro doméstico com válvulas separadas para água quente e fria. O objetivo é
obter (1) a temperatura desejada da água do chuveiro e (2) um fluxo de água desejado. Esboce
um diagrama do sistema de controle a malha fechada.
2. (DiSTEFANO; STUBBERUD; WILLIAMS, 1995, p. 136) Um impulso é aplicado à entrada
de um sistema contínuo e a saída é observada como sendo a função do tempo te 2− . Encontre a
função de transferência do sistema.

Automação e Controle 1 – Aula 5P – Professor Marcio Eisencraft – julho 2006
2
3. (DiSTEFANO; STUBBERUD; WILLIAMS, 1995, p. 139) Determine a função de transferên-
cia de duas redes de atraso conectadas em série como mostrado na Figura 1.
Figura 1 –(DiSTEFANO; STUBBERUD; WILLIAMS, 1995).
4. (DORF; BISHOP, 2001, p. 91) Considere o sistema mecânico esboçado na Figura 2. A entra-
da é dada por ( )tf e a saída por ( )ty . Determinar a função de transferência de ( )tf para ( )ty
e, usando o Matlab, traçar a curva da resposta a uma entrada degrau unitário. Seja 10=m ,
1=k e 5,0=b . Mostrar que a amplitude máxima da saída é de cerca de 1,8.
Figura 2 – Sistema mecânico mola-massa-amortecedor (DORF; BISHOP, 2001).

Automação e Controle 1 – Aula 5P – Professor Marcio Eisencraft – julho 2006
3
5. (NISE, 2002, p. 84) Para o sistema mecânico em rotação mostrado na Figura 3, calcule a fun-
ção de transferência, ( ) ( ) ( )sTssG 2Θ= .
Figura 3 – (NISE, 2002).
6. (1052) Resolver exercício PM2.8 da página 92 do (DORF; BISHOP, 2001).

Automação e Controle I – Aula 6P - Professor Marcio Eisencraft – setembro 2006
1
Aula 6P – Questões da P1 1. (NISE; 2002, p. 21) (1,0) Funcionalmente, como os sistemas a malha fechada se diferenciam
dos sistemas a malha aberta? Dê três exemplos de sistemas a malha aberta.
2. (NISE; 2002, p. 32) (2,0) Dada a seguinte equação diferencial, obter a solução ( )y t se todas
as condições iniciais forem zero. Usar a transformada de Laplace.
( )2
2 12 32 32d y dy
y u tdtdt
+ + = (1)
3. (DORF; BISHOP, 1998, p. 78) A velocidade de rotação ω de um satélite mostrado na figura
a seguir é ajustada mudando-se o comprimento L da barra. A função de transferência entre ( )sω e a variação incremental do comprimento da barra ( )L sΔ é
( )
( )
( )
( )( )22,5 25 1
s sL s s sω +
=Δ + +
(2)
A variação do comprimento da barra é ( )14
L ss
Δ = . Determine a resposta de velocidade ( )tω .
(DORF; BISHOP, 1998).
4. (PHILLIPS; HARBOR, 1997, p. 70) Considere o circuito mostrado na figura seguinte.
(a) (1,0) Encontre a função de transferência ( )
( )
2
1
V sV s
.
(b) (1,0) Suponha que um indutor 2L é conectado aos terminais de saída em paralelo com 3R .
Encontre a função de transferência ( )
( )
2
1
V sV s
.

Automação e Controle I – Aula 6P - Professor Marcio Eisencraft – setembro 2006
2
(PHILLIPS; HARBOR, 1997).
5. (OGATA; 2003, p. 44) (2,0) Escreva uma seqüência de comandos Matlab que gere a expan-
são em frações parciais da seguinte função.
( )( )( )
( )( )( )210 2 41 3 5s s
F ss s s
+ +=
+ + + (3)
Em seguida obtenha a transformada inversa de Laplace de ( )F s .

Automação e Controle 1 – Aula 7P – Professor Marcio Eisencraft – julho 2006
1
Aula 7P – Exemplos simples de sistemas e diagramas de
blocos no Simulink Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 642-653.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 81 – 91.
1. Introdução
O Simulink é usado para simular sistemas. Usa uma interface gráfica do usuário (GUI)
para você interagir com blocos que representam subsistemas. Você pode posicionar os
blocos, ajustá-los, rotulá-los, especificar seus parâmetros e interconectá-los para formar
sistemas completos para os quais podem ser executadas simulações.
O Simulink possui bibliotecas de blocos a partir das quais podem ser feitas cópias de sub-
sistemas, de fontes (isto é, geradores de funções) (sources) e dispositivos de visualização
(sinks). Estão disponíveis blocos de subsistemas para representar sistemas lineares, não-
lineares e discretos.
2. Usando o Simulink
O resumo a seguir mostra os passos para usar o Simulink.
1. Acessando o Simulink. O Simulink Library Browser, de onde começamos o Simulink, é
acessado digitando-se simulink na janela Matlab Command Window ou clicando no
botão Simulink Library Browser na barra de ferramentas, como mostra a parte circundada
na Figura 1.
Figura 1 - A janela MATLAB Command Window - como acessar o Simulink. (NISE, 2002).
Criamos agora uma janela de modelo untitled (sem título), Figura 2, clicando sobre o bo-
tão Create a new model (dentro do círculo mostrado na Figura 2) na barra de ferramentas
da janela Simulink Library Browser.

Automação e Controle 1 – Aula 7P – Professor Marcio Eisencraft – julho 2006
2
Figura 2 - A janela Simulink Library Browser mostrando: a. o botão Create a new model assi-
nalado com um círculo; b. a janela de modelo untitled.
2. Selecionando subsistemas. Selecione os subsistemas necessários e arraste-os com o mouse
para a janela untitled.
3. Monte e rotule os subsistemas. Você pode posicionar, ajustar o tamanho e renomear os
blocos. Basta clicar duas vezes sobre eles.
4. Interconecte subsistemas e rotule os sinais. Posicione o cursor na pequena seta de saída ao
lado de um subsistema, pressione o botão do mouse e arraste o cursor resultante em forma
de retículo para a pequena seta de entrada do próximo subsistema.
5. Escolha de parâmetros para os subsistemas. Dê um duplo clique no subsistema da janela
do modelo e digite os parâmetros desejados.
6. Escolha os parâmetros para simulação. Selecione Parameters no menu Simulation na ja-
nela do modelo para configurar parâmetros adicionais, como o tempo de simulação.
7. Inicie a simulação. Selecione Start no menu Simulation na janela do modelo ou clique no
ícone Start/Pause na barra de ferramentas da janela do modelo, como mostrado na Figura
2.
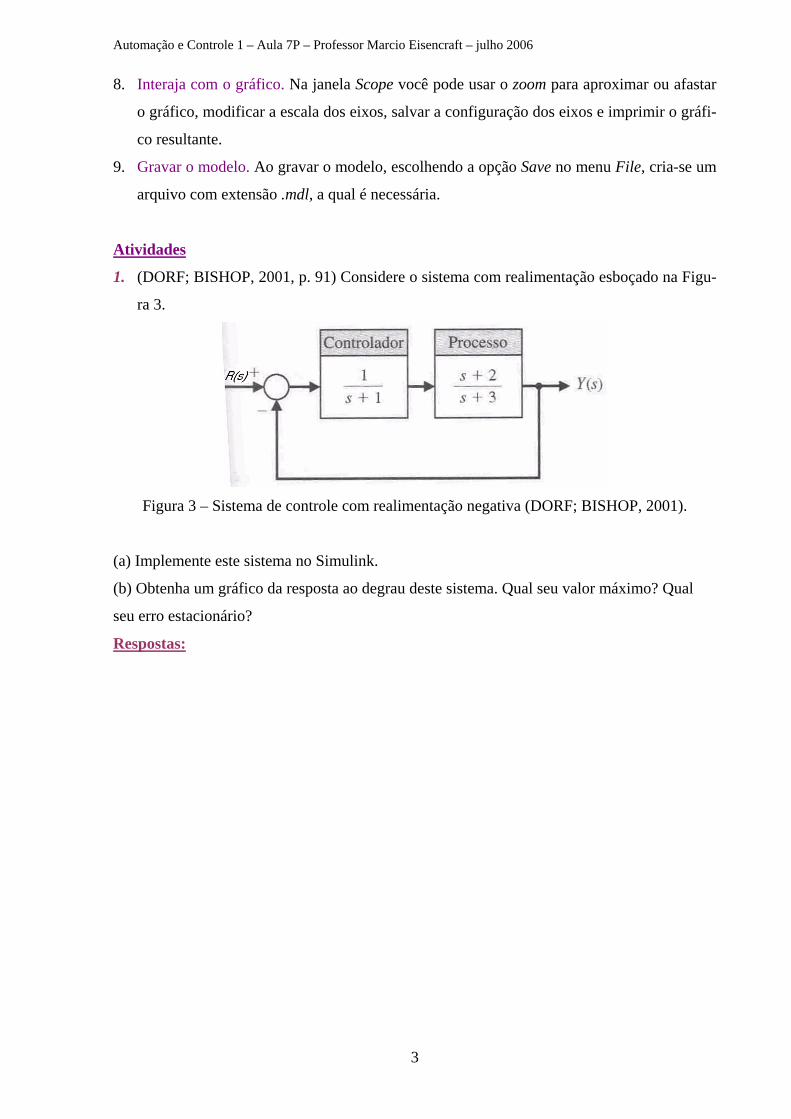
Automação e Controle 1 – Aula 7P – Professor Marcio Eisencraft – julho 2006
3
8. Interaja com o gráfico. Na janela Scope você pode usar o zoom para aproximar ou afastar
o gráfico, modificar a escala dos eixos, salvar a configuração dos eixos e imprimir o gráfi-
co resultante.
9. Gravar o modelo. Ao gravar o modelo, escolhendo a opção Save no menu File, cria-se um
arquivo com extensão .mdl, a qual é necessária.
Atividades
1. (DORF; BISHOP, 2001, p. 91) Considere o sistema com realimentação esboçado na Figu-
ra 3.
Figura 3 – Sistema de controle com realimentação negativa (DORF; BISHOP, 2001).
(a) Implemente este sistema no Simulink.
(b) Obtenha um gráfico da resposta ao degrau deste sistema. Qual seu valor máximo? Qual
seu erro estacionário?
Respostas:

Automação e Controle 1 – Aula 7P – Professor Marcio Eisencraft – julho 2006
4
2. (DORF; BISHOP, 2001, p. 88) Uma carga adicionada a um caminhão resulta em uma
força F sobre a mola do suporte e o pneu se deforma como está mostrado na Figura 4a. O
modelo para o movimento do pneu está mostrado na Figura 4b.
Figura 4 – Modelo de suporte de caminhão (DORF; BISHOP, 1991).
(a) Determine a função de transferência ( )( )sF
sX1 .
(b) Implemente esta função no Simulink. Use 121 == kk e 5,0=b e 10=M .
(c) Obtenha um gráfico da posição ( )tx1 quando balançamos o caminhão com uma freqüência
de 1 oscilação por segundo (0,1Hz) o que pode ser modelado por ( ) ( )sin 2 0,1f t tπ= ⋅ ⋅ .
(d) Repita para freqüências de 0,2Hz, 0,5Hz e 1Hz. O que ocorre com a saída? Justifique.
Respostas:

Automação e Controle 1 – Aula 7P – Professor Marcio Eisencraft – julho 2006
5
3. (DORF; BISHOP, 2001, p. 81) Estruturas em T são usadas freqüentemente como filtros
em sistemas de controle em corrente alternada. A Figura 5 mostra um desses circuitos em
T.
Figura 3 – Estrutura em T (DORF; BISHOP, 2001).
(a) Determinar a função de transferência da rede.
(b) Implemente este sistema no Simulink para 5,01 =R , 12 =R e 5,0=C .
(c) Obtenha um gráfico da resposta ao degrau para este sistema.
(d) Obtenha a resposta à entrada ( ) ( )ftx π2sin= para 100;10;1;1,0=f Hz.
Respostas:
4. Implemente no Simulink o diagrama de blocos do sistema de posicionamento de antena
discutido na Aula 12T usando a Configuração 2. Obtenha a resposta deste sistema a uma
entrada ( ) ( )tuti =θ . Comente o resultado obtido.

Automação e Controle 1 – Aula 8P – Professor Marcio Eisencraft – julho 2006
1
Aula 8P – Revisão: vetores e matrizes no Matlab Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Apêndice G.
CHAPMAN, Stephen J. Programação em MATLAB para engenheiros. São Paulo: Pioneira Thomson
Learning, 2003. 477 p. ISBN 8522103259.
1. (CHAPMAN, 2003, p. 30) Responda às questões seguintes considerando a matriz abaixo:
c=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−
0.05.56.03.11.36.01.16.06.04.32.31.1.
(a) Qual o tamanho de c?
(b) Qual o valor de c(2,3)?
(c) Apresente os índices de todos os elementos cujo valor seja 0,6.
2. (CHAPMAN, 2003, p. 30) Qual a diferença entre uma matriz e um vetor?
3. (CHAPMAN, 2003, p. 38) Assuma que a matriz c seja definida como abaixo e determine
o conteúdo das seguintes submatrizes:
c=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−
0.05.56.03.11.36.01.16.06.04.32.31.1
(a) c(2,:)
(b) c(:,end)
(c) c(1:2,2:end)
(d) c(6)
(e) c(4:end)
(f) c(1:2,2:4)
(g) c([1 4],2)
(h) c([2 2], [3 3])

Automação e Controle 1 – Aula 8P – Professor Marcio Eisencraft – julho 2006
2
4. (CHAPMAN, 2003, p. 29) Qual o conteúdo das seguintes matrizes:
A=zeros(2);
B = zeros(2,3);
C= [1 2; 3 4];
D = zeros(size(c));
5. Qual o resultado do comando diag([1 2 3])? O que faz o comando diag?
6. (CHAPMAN, 2003, p. 29) Determine o conteúdo da matriz a após a execução das se-
guintes declarações:
(a) a = eye(3,3);
b = [1 2 3];
a(2,:) = b;
(b) a= eye(3,3);
b= [7 8 9];
a(3,:) = b([3 1 2]);
7. Qual o resultado do comando toeplitz([1 2 3])? O que faz o comando toe-
plitz?

Automação e Controle 1 – Aula 8P – Professor Marcio Eisencraft – julho 2006
3
8. (CHAPMAN, 2003, p. 29) Determine o conteúdo da matriz a após a execução das seguin-
tes declarações:
a = eye(3,3);
b = [4 5 6];
a(:,3) = b’;
9. Calcule o determinante da matriz ⎥⎦
⎤⎢⎣
⎡−
=7124
A . Use o comando det para confirmar seu
resultado.
10. Calcule o menor 23M do determinante da matriz ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=
481132
421A . Escreva um coman-
do Matlab que resolve este problema.
11. Calcule o cofator 13C da matriz do problema anterior.
12. Resolva de forma manuscrita e usando o Matlab, o determinante da matriz
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
911040171
A .
13. Para que serve o comando Matlab cond?
14. Verifique a singularidade ou não da matriz ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
131862731
A .
15. Calcule a adjunta da matriz do exercício anterior.

Automação e Controle 1 – Aula 8P – Professor Marcio Eisencraft – julho 2006
4
16. Usando a função rank determine o posto da matriz do exercício anterior.
17. (CHAPMAN, 2003, p. 29) Assuma que a, b, c e d são definidas como a seguir:
a= ⎥⎦
⎤⎢⎣
⎡1201 b= ⎥
⎦
⎤⎢⎣
⎡−1021 c= ⎥
⎦
⎤⎢⎣
⎡23 e d = 5.
Qual é o resultado das seguintes operações?
a+b a+c
a.*b a+d
a*b a.*d
a*c a*d
18. (CHAPMAN, 2003, p. 51) Assuma que a, b, c e d são definidas como a seguir e cal-
cule os resultados das seguintes operações se elas forem legais. Se uma operação for ile-
gal, explique o motivo.
a= ⎥⎦
⎤⎢⎣
⎡− 21
12 b= ⎥
⎦
⎤⎢⎣
⎡ −1310 c= ⎥
⎦
⎤⎢⎣
⎡21 e d = -3.
(a) result = a.*c;
(b) result = a* [c c];
(c) result = a.*[c c];
(d) result = a+b*c;
(e) result = a+b.*c;

Automação e Controle 1 – Aula 8P – Professor Marcio Eisencraft – julho 2006
5
19. (CHAPMAN, 2003, p. 51) Resolva para x a equação BAx = , em que
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
101232121
A e ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
011
B .
20. (CHAPMAN, 2003, p. 74) Resolva o seguinte sistema de equações simultâneas para x :
-2.0 X1 + 5.0 X2 + 1.0 X3 + 3.0 X4 + 4.0 X5 - 1.0 X6 = 0.0
2.0 X1 - 1.0 X2 - 5.0 X3 - 2.0 X4 + 6.0 X5 + 4.0 X6 = 1.0
-1.0 X1 + 6.0 X2 - 4.0 X3 - 5.0 X4 + 3.0 X5 - 1.0 X6 = -6.0
4.0 X1 + 3.0 X2 - 6.0 X3 - 5.0 X4 - 2.0 X5 - 2.0 X6 = 10.0
-3.0 X1 + 6.0 X2 + 4.0 X3 + 2.0 X4 - 6.0 X5 + 4.0 X6 = -6.0
2.0 X1 + 4.0 X2 + 4.0 X3 + 4.0 X4 + 5.0 X5 - 4.0 X6 = -2.0
21. Defina o que são autovalores e autovetores de uma matriz. Encontre-os para:
1 0 32 1 50 3 1
A⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
(1.1)

Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
1
Aula 9P – Representação computacional de sistemas de controle no
espaço de estados Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 610 – 611.
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 121-124.
1. Criando a representação no espaço de estados
Para criar a descrição de um sistema no espaço de estados no Matlab, utilizamos o co-
mando ss (de state space) cuja funcionalidade é a mesma do tf para funções de transfe-
rência. Seu formato é:
SYS = SS(A,B,C,D)
Por exemplo, considere o problema de obter a resposta ao degrau para um sistema representa-
do por:
[ ]x
xx
1201
2131
−=
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡−
=
y
u.
Utilizamos a seguinte seqüência de instruções: >> A = [1 3; -1 2];
>> B = [1;0];
>> C = [2 -1];
>> D = 0;
sistema = ss(A,B,C,D)
a =
x1 x2
x1 1 3
x2 -1 2
b =
u1
x1 1
x2 0
c =
x1 x2
y1 2 -1
d =

Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
2
u1
y1 0
>> step(sistema)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6-4
-3
-2
-1
0
1
2
3Step Response
Time (sec)
Am
plitu
de
2. Calculando a saída de um sistema a uma entrada
Pode-se utilizar o comando lsim para obter a saída de um sistema a uma dada entrada
incluindo aí condições iniciais. Seu formato é: LSIM(SYS,U,T,X0)
O sistema sys pode estar definido na forma de espaço de estados ou função de transfe-
rência, U são os valores que a entrada assume, T os instantes de tempo em que a entrada
foi passada e X0 é um vetor de condições iniciais das variáveis de estado (se não especifi-
cado, considera-se condições iniciais nulas). Assim, a resposta ao degrau do exercício an-
terior poderia ter sido obtida com a seguinte seqüência de comandos: A = [1 3; -1 2];
B = [1;0];
C = [2 -1];
D = 0;
sistema = ss(A,B,C,D)
t = linspace(0,1.6,1000);
u = ones(1,1000);
figure(2);
lsim(sistema, u,t);

Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
3
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6-4
-3
-2
-1
0
1
2
3Linear Simulation Results
Time (sec)
Am
plitu
de
Exercício
1. (DORF; BISHOP, 2001, p. 138) Considere-se o sistema seguinte:
[ ]x
xx
0110
3210
=
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡−−
=
y
u
com
( ) ⎥⎦
⎤⎢⎣
⎡=
01
0x .
(a) Usando a função lsim obter e traçar a resposta do sistema quando ( ) 0=tu .
(b) Obtenha um gráfico de ( )tx2 para a mesma entrada.
3. Convertendo funções de transferência para o espaço de estados
As funções de transferência representadas seja pelo numerador e denominador, seja por
um objeto LIT podem ser convertidas para o espaço de estados. Para a representação em
numerador e denominador, a conversão pode ser implementada usando:
[A,B,C,D] = tf2ss(num,den).
A matriz A retorna em uma forma chamada canônica controlável. Para obter a forma em vari-
áveis de fase, [Af,Bf,Cf,Df], executamos as seguintes operações: Af =inv(P)*A*P;

Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
4
Bf = inv(P)*B; Cf =C*P, Df = D, onde P é uma matriz quadrada com valores
unitários ao longo da diagonal secundária e zeros no resto.
Para sistemas representados como objetos LIT, o comando ss(F), onde F é um objeto fun-
ção de transferência LIT, pode ser usado para converter F em um objeto do espaço de estados.
Por exemplo, considere obter a representação no espaço de estados da função de transferên-
cia:
( )( ) 24269
2423 +++
=ssssR
sC .
Para o objeto função de transferência LIT, a conversão para o espaço de estados não conduz à
forma em variáveis de fase. Como ss(F) não conduz a formas familiares das equações de
estado (nem é possível converter facilmente em formas familiares) teremos, no momento, uso
limitado dessa transformação. num=24; % Define o numerador de G(s)=C(s)/R(s).
den=[1 9 26 24]; % Define o denominador de G(s).
[A,B,C,D]=tf2ss(num,den) % Converte G(s)para a forma canônica
% do controlador,
% armazena as matrizes A, B, C, D, e
% mostra o resultado.
P=[0 0 1;0 1 0;1 0 0]; % Forma a matriz de transformação.
Af=inv(P)*A*P % Forma a matriz A (variáveis de fase).
Bf=inv(P)*B % Forma o vetor B (variáveis de fase).
Cf=C*P % Forma o vetor C,(variáveis de fase).
Df=D % Forma D,(variáveis de fase).
T=tf(num,den) % Representa T(s)=24/(s^3+9s^2+26s+24)
% como um objeto função de transferência LTI.
Tss=ss(T) % Converte T(s) em representação no espaço de
% estados.
Exercício
2. (NISE, 2002, p. 118) Utilize o Matlab para obter a representação no espaço de estados em
variáveis de fase para cada um dos sistemas mostrados na Figura 1 a seguir.
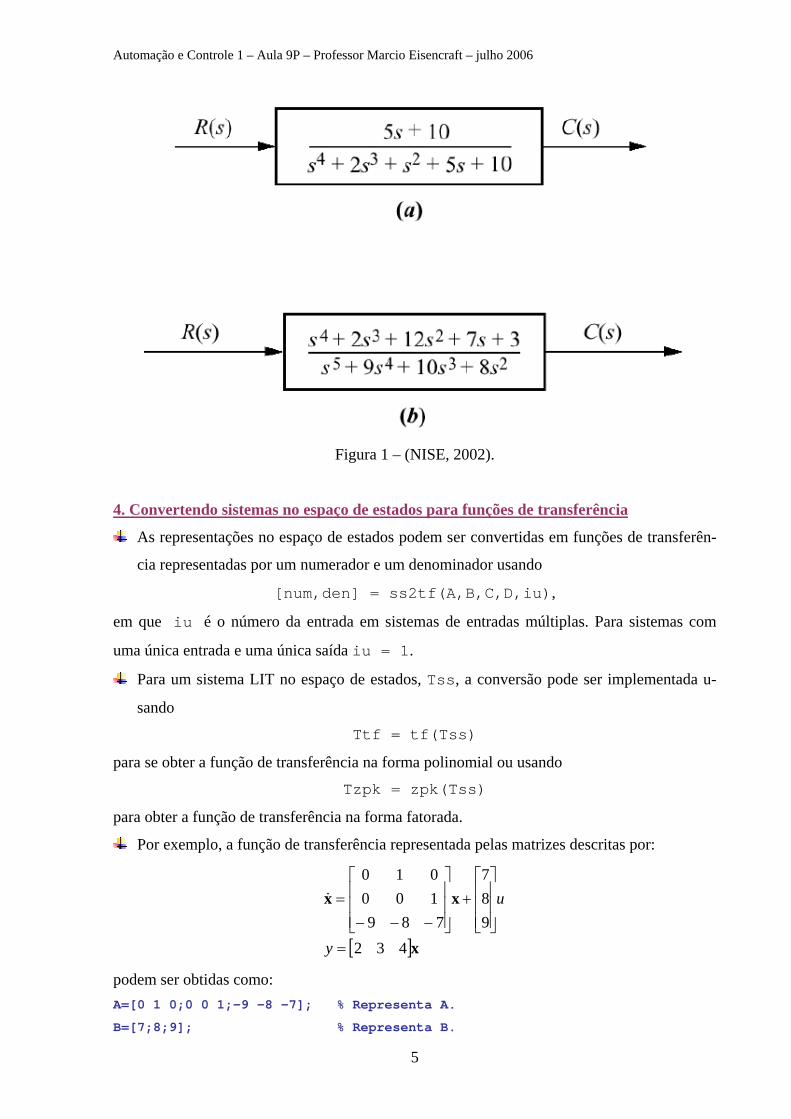
Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
5
Figura 1 – (NISE, 2002).
4. Convertendo sistemas no espaço de estados para funções de transferência
As representações no espaço de estados podem ser convertidas em funções de transferên-
cia representadas por um numerador e um denominador usando
[num,den] = ss2tf(A,B,C,D,iu),
em que iu é o número da entrada em sistemas de entradas múltiplas. Para sistemas com
uma única entrada e uma única saída iu = 1.
Para um sistema LIT no espaço de estados, Tss, a conversão pode ser implementada u-
sando
Ttf = tf(Tss)
para se obter a função de transferência na forma polinomial ou usando
Tzpk = zpk(Tss)
para obter a função de transferência na forma fatorada.
Por exemplo, a função de transferência representada pelas matrizes descritas por:
[ ]x
xx
432987
789100010
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
y
u
podem ser obtidas como: A=[0 1 0;0 0 1;-9 -8 -7]; % Representa A.
B=[7;8;9]; % Representa B.

Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
6
C=[2 3 4]; % Representa C.
D=0; % Representa D.
[num,den]=ss2tf(A,B,C,D,1) % Converte uma representação
% no espaço de estados
% em função de transferência representada por
% um numerador e um denominador,G(s)=num/den,
% em forma polinomial,
% e mostra num e den.
Tss=ss(A,B,C,D) % Form LTI state-space model.
Ttf=tf(Tss) % Transforma a representação no espaço de
% estados em função de transferência
% na forma polinomial.
Tzpk=zpk(Tss) % Transforma a representação no espaço de
% estados em função de transferência
% na forma fatorada.
Exercícios
3. (NISE, 2002, p. 118) Utilize o Matlab para obter a função de transferência, ( ) ( )( )sRsYsG = ,
para cada um dos sistemas representados no espaço de estados.
(a)
[ ]x
xx
64312850
3297100001000310
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
=
y
r
(b)
[ ]x
xx
6792145672
1340604367821101255324013
−−=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−
−−−−−
=
y
u
4. (NISE, 2002, p. 118) Utilize o Matlab para obter a representação no espaço de estados em
variáveis de fase para cada um dos sistemas mostrados na Figura 2 a seguir.

Automação e Controle 1 – Aula 9P – Professor Marcio Eisencraft – julho 2006
7
Figura 2 – (NISE, 2002).
5. (DORF; BISHOP, 2001, p. 138) Considere o sistema:
[ ]x
xx
001100
422100010
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
y
u.
(a) Usando a função ss2tf, determinar a função de transferência ( )( )sUsY .
(b) Traçar a resposta do sistema à condição inicial ( ) [ ]T1000 =x para 100 ≤≤ t .
6. (3061) Resolver o Exercício 40 da página 173 do (NISE, 2002).

Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006
1
Aula 10P – Aula de exercícios para P2 Bibliografia
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo: Prentice-Hall do Brasil, 2003.
788 p. ISBN 8587918230.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo: Makron
Books, c1997. 558 p. : il. 24 cm ISBN 85-346-0596-3.
1. (DORF; BISHOP, 2001, p. 78) O sistema de posicionamento de alta precisão de uma
peça deslizante está mostrado na figura a seguir, Determinar a função de transferência
( )( )sXsX
IN
P quando o coeficiente de atrito viscoso da haste acionadora é 1=db , a constante
de mola da haste acionadora é 3=dk , 32
=cm e o atrito de deslizamento é 1=Sb .
Peça deslizante de precisão (DORF; BISHOP, 2001).

Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006
2
2. (PHILLIPS; HARBOR, 1996, p. 79) Construa um diagrama para computador analógico
das seguintes funções de transferência:
(a) ( )4
3,6+
=s
sG
(b) ( )7,797,9
11152 ++
+=
ssssG

Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006
3
3. (OGATA, 2003, p. 121) Obtenha a representação no espaço de estados do sistema mecâ-
nico indicado na figura, em que 1u e 2u são as entradas e 1y e 2y são as saídas.
Sistema mecânico (OGATA, 2003).

Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006
4
4. (NISE, 2002, p.86) (2,0) Para o motor, a carga e a curva torque-velocidade mostrados na
figura a seguir, obter a função de transferência, ( ) ( )( )sEssG
a
LΘ= .

Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006
5
5. (NISE, 2002, p. 116) Represente o circuito elétrico mostrado na figura a seguir no espaço
de estados em que ( )Ri t é a saída.
(NISE, 2002).
6. (2052) Resolver Exercício E2.21 da página 78 do (DORF; BISHOP, 2001, p. 78).

Automação e Controle I – Aula 12P – Professor Marcio Eisencraft – julho 2006
1
Aula 12P – Efeitos das não-linearidades Bibliografia
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Páginas 152-158.
MATSUMOTO, Élia Yathie. Simulink 5. São Paulo: Érica, 2003. 204 p.: il. ; 25 cm ISBN 8571949379.
Página 167.
Nesta aula, vamos examinar qualitativamente os efeitos das não-linearidades sobre a res-
posta no domínio do tempo de sistemas físicos.
Nos exemplos a seguir, inserimos nos sistemas não-linearidades como saturação, zona
morta e folgas, mostradas na Figura 1, para mostrar os efeitos destas não-linearidades so-
bre as respostas lineares.
Figura 1 – Algumas não-linearidades físicas (NISE, 2002).
As respostas foram obtidas usando o Simulink.
Atividade 1 - Saturação
O sistema da Figura 2 pode ser usado para ilustrar o efeito da saturação de um amplificador na
resposta ao degrau de um motor que é limitar a velocidade obtida.
Figura 2 - Diagrama de blocos em Simulink para ilustrar saturação (NISE, 2002).
Simule este sistema, compare as curvas obtidas e explique o que ocorre.

Automação e Controle I – Aula 12P – Professor Marcio Eisencraft – julho 2006
2
Atividade 2 - Zona morta
O efeito de uma zona morta sobre o ângulo de saída do eixo acionado por um motor com
engrenagens pode ser simulado pelo sistema da Figura 3.
Figura 3 - Efeito da zona morta sobre a resposta de deslocamento angular da carga (NISE,
2002).
Simule este sistema, compare as curvas obtidas e explique o que ocorre.
Atividade 3 - Folgas
O efeito das folgas (backlash) sobre o eixo de saída acionado por um motor com engrena-
gens é simulado pelo sistema da Figura 4.

Automação e Controle I – Aula 12P – Professor Marcio Eisencraft – julho 2006
3
Figura 4 - Efeito da folga sobre a resposta de deslocamento angular da carga (NISE, 2002).
Quando o motor inverte o sentido de rotação, o eixo de saída permanece parado no início do
movimento de inversão de sentido. Quando as engrenagens finalmente ultrapassam a folga de
contato, o eixo de saída começa a girar no sentido oposto. A resposta resultante é bastante
diferente da resposta de um sistema linear sem folga.
Simule este sistema, compare as curvas obtidas e explique o que ocorre.
Exercício
1. Resolver Exercício 50 da página 176 do (NISE, 2002).
Automação e Controle 1 – Aula 13P – Professor Marcio Eisencraft – julho 2006
1
Aula 13P – Modelamento de sistemas – o levitador magnético Bibliografia
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Páginas 1-14.
Manual for Model 730 – Magnetic Levitation System, ECP, 1999.
É OBRIGATÓRIO TRAZER UM DISQUETE PARA ESTA AULA (1 POR DUPLA) PARA
QUE VOCÊ POSSA EXPORTAR OS DADOS DO KIT.
O objetivo desta aula é verificar a validade de um modelo de função de transferência de 2ª
ordem para um sistema físico, o levitador magnético.
Cada grupo obterá a resposta ao degrau do kit. Siga os passos descritos pelo professor.
Pede-se:
(a) Faça um gráfico da resposta ao degrau obtida.
(b) A partir dos pontos obtidos, determine:
a ultrapassagem percentual
o tempo de assentamento
o tempo de subida
o valor da resposta no regime permanente
(c) Com os valores da ultrapassagem percentual e do tempo de assentamento, encontre ζ e
nω .
(d) Monte a função de transferência experimental ( )G s .
(e) Usando a função step levante a resposta ao degrau de ( )G s e compara com a curva
experimental do item (a).

Automação e Controle 1 – Aula 14P – Professor Marcio Eisencraft – julho 2006
1
Aula 14P – Aula de exercícios para P3 Bibliografia
DORF, Richard C. Sistemas de controle modernos. 8. ed. Rio de Janeiro: LTC, 2001. 659 p. ISBN
0201308649. Página 132.
NISE, Norman S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, c2002. 695 p. ISBN
8521613016. Página 171.
1. (NISE, 2002, p. 171) Para cada uma das respostas ao degrau unitário mostradas na Figura
1, determine a função de transferência do sistema.
Figura 1 – (NISE, 2002).
Resolução:

Automação e Controle 1 – Aula 14P – Professor Marcio Eisencraft – julho 2006
2
2. (DORF; BISHOP, 2001, p. 132) Um sistema é descrito por equações em variáveis de es-
tado:
[ ]x
xx
103020100
1012034111
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−=
y
u.
Determinar ( ) ( )( )sUsYsG = .
Resolução:

Automação e Controle 1 – Aula 14P – Professor Marcio Eisencraft – julho 2006
3
3. (NISE, 2002, p. 171) No sistema mostrado na Figura 2 é aplicado um degrau de torque em
( )t1θ . Determinar:
(a) A função de transferência ( ) ( )( )sT
ssG 2Θ= .
(b) A ultrapassagem percentual, o tempo de assentamento e o instante de pico para ( )t2θ .
Figura 2 – (NISE, 2002).
Resolução:
4. (DORF; BISHOP, 2001, p. 78) (1,5) A função de transferência de um sistema é:
( )( )
( )158
2102 ++
+=
sss
sRsY
Determinar ( )ty quando ( )tr for um degrau unitário de entrada.
Resolução:

Automação e Controle I - Lista de Exercícios Suplementares 1 – Professor Marcio Eisencraft – agosto 2006
Automação e Controle I
Lista de Exercícios Suplementares 1 – 1º semestre 2006 1. Resolva o Exercício P1.2 da página 20 do (DORF; BISHOP, 1998).
2. Resolver Exercício E2.4 da página 76 do (DORF; BISHOP, 2001). Respostas: no livro.
3. Resolver Exercício 8 da página 23 do (NISE, 2002).
4. Resolver Exercício 17 da página 25 do (NISE, 2002).
5. Resolver Exercício 1 da página 81 do (NISE, 2002).
Respostas: (a) s1
; (b) 2
1s
; (c) 22 ωω+s
; (d) 22 ω+ss
.
6. Resolver Exercício 2 da página 81 do (NISE, 2002).
Respostas: (a) ( ) 22 ω
ω++ as
; (b) ( )
( ) 22 ω+++
asas
; (c) 4
6s
.
7. Resolver Exercício 4 da página 81 do (NISE, 2002).
Respostas: (a) ( ) ( )ttetttx t sin6,0cos2,22sin1,02cos2,0 −+−−= − ; (b) ; (c) tteee ttt +−+− −−− 295 2
2
41
812sin2cos
89 ttt +−+ .
8. Resolver Exercício 7 da página 81 do (NISE, 2002).
Resposta: 153864
23
23
++++++
ssssss
.
9. Resolver Exercício 10 da página 82 do (NISE, 2002).
Resposta: ( ) ( ) ( )tuttttcdtdc
dtcd
dtcd
dtcd 32
3
3
4
4
5
5
399036182523 ++++=++++ δ .
10. Resolver Exercício 12 da página 82 do (NISE, 2002).
11. Resolver Exercício 14 da página 82 do (NISE, 2002).
1

Automação e Controle I - Lista de Exercícios Suplementares 1 – Professor Marcio Eisencraft – agosto 2006
12. Resolver Exercício 17 da página 82 do (NISE, 2002).
Respostas: (a) 132 ++ ss
s; (b)
1342
2
2
++ sss
.
13. Resolver Exercício 19 da página 82 do (NISE, 2002).
Respostas: (a) 2456
323
2
+++ ssss
; (b) 272
132
2
++++
ssss
.
14. Resolver Exercício 23 da página 83 do (NISE, 2002).
Resposta: 1
12 +s
.
15. Resolver Exercício B.3.20 da página 122 do (OGATA, 2003).
16. Resolver Exercício 2.1 da página 70 do (PHILLIPS; HARBOR, 1997).
Respostas: (a) 2121
221
RRCRsRRCRsR++
+; (b) ; (c) 2R
2010510105
5
5
+⋅+⋅
−
−
ss
e 10, respectivamente.
17. Resolver Exercício 1.10 da página 32 do (SILVEIRA; SANTOS, 1999).
18. (DiSTEFANO; STUBBERUD; WILLIAMS, 1995, p. 113) Usando a técnica de transfor-
madas de Laplace, encontre a resposta forçada da equação diferencial:
xdtdxy
dtdy
dtyd 23442
2
+=++ ,
em que , . ( ) tetx 3−= 0≥t
2

Automação e Controle I - Lista de Exercícios Suplementares 1 – Professor Marcio Eisencraft – setembro 2006
Automação e Controle I
Lista de Exercícios Suplementares 2 – 2º semestre 2006
1. Resolver Exercício E2.21 da página 78 do (DORF; BISHOP, 2001). Resposta: no livro.
2. Resolver Exercício PM2.3 da página 91 do (DORF; BISHOP, 2001).
3. Resolver Exercício E3.4 da página 128 do (DORF; BISHOP, 2001).
Resposta: .
[ ]⎪⎪⎩
⎪⎪⎨
⎧
+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
uy
u
0001500
234100010
x
xx
4. Resolver Exercício E3.19 da página 129 do (DORF; BISHOP, 2001). Resposta: no livro. 5. Resolver o Exercício 16(b) da página 82 do (NISE, 2002).
Resposta: (a) ( )
( )
2
2 1O
I
V s sV s s s
=+ +
.
6. Resolver Exercício 17(a) da página 82 do (NISE, 2002).
7. Resolver Exercício 33 da página 84 do (NISE, 2002).
Resposta: 41320
3)()(
22
++=
ΘsssT
s.
8. Resolver Exercício 37 da página 85 do (NISE, 2002).
9. Resolver Exercício 40 da página 85 do (NISE, 2002). (Ao primeiro aluno que en-
tregar a solução completa e correta deste exercício será acrescentado 0,5 ponto
à nota da prova P2).
1

Automação e Controle I - Lista de Exercícios Suplementares 1 – Professor Marcio Eisencraft – setembro 2006
Resposta: ( )( )
214
219218
2 ++=
sssTsX
.
10. Resolver Exercício 42 da página 85 do (NISE, 2002).
Resposta: ( )( ) ( )6667,1
1667,0+
=Θ
sssEs
a
L .
11. Resolver Exercício 43 da página 86 do (NISE, 2002).
Resposta: ( )
( )1
12 0,75G s
s s=
+.
12. Resolver Exercício 44 da página 86 do (NISE, 2002).
Resposta: ( ) ( )122,0222,0+
=ss
sG
13. Resolver Exercício 54 da página 87 do (NISE, 2002).
Resposta: ( )( )
MKs
Mf
s
MsFsY
v ++=
2
1
, com ( )s
WsF D= .
14. Resolver Exercício 1 da página 116 do (NISE, 2002).
15. Resolver Exercício 3 da página 116 do (NISE, 2002).
16. Resolver Exercício 4 da página 116 do (NISE, 2002).
Resposta: , 1 1 2 2 3 3T
x v x v x v⎡ ⎤= ⎢ ⎥⎣ ⎦x
0 1 0 0 0 0 0
1 3 1 1 0 1 0
0 0 0 1 0 0 0
1 1 1 2 0 1 1
0 0 0 0 0 1 0
0 1 0 1 0 3 0
0 0 0 0 1 0 0
u
y u
⎧ ⎡ ⎤ ⎡ ⎤⎪⎪ ⎢ ⎥ ⎢ ⎥⎪ ⎢ ⎥ ⎢ ⎥⎪ − −⎪ ⎢ ⎥ ⎢ ⎥⎪⎪ ⎢ ⎥ ⎢ ⎥⎪ ⎢ ⎥ ⎢ ⎥⎪⎪ ⎢ ⎥ ⎢ ⎥= +⎪⎪ − −⎢ ⎥ ⎢ ⎥⎨ ⎢ ⎥ ⎢ ⎥⎪ ⎢ ⎥ ⎢ ⎥⎪⎪ ⎢ ⎥ ⎢ ⎥⎪⎪ ⎢ ⎥ ⎢ ⎥⎪ −⎢ ⎥ ⎢ ⎥⎪ ⎣ ⎦ ⎣ ⎦⎪⎪⎪ ⎡ ⎤⎪ = +⎢ ⎥⎪⎩ ⎣ ⎦
x x
x
.
17. Resolver Exercício 5 da página 117 do (NISE, 2002).
2

Automação e Controle I - Lista de Exercícios Suplementares 1 – Professor Marcio Eisencraft – setembro 2006
18. Resolver Exercício 6 da página 117 do (NISE, 2002).
19. Resolver Exercício 8 da página 118 do (NISE, 2002).
20. Resolver Exercício 13 da página 118 do (NISE, 2002).
3

Automação e Controle I - Lista de Exercícios Suplementares 3 – Professor Marcio Eisencraft – novembro 2006
1
Automação e Controle I
Lista de Exercícios Suplementares 3 – 2º semestre 2006
1. Resolver Exercício E2.18 da página 78 do (DORF; BISHOP, 2001).
Resposta: ( ) 3 54 53 , 0
3 3t ty t e e t− −= + − ≥ .
2. Resolver Exercício 26 da página 84 do (NISE, 2002).
Resposta: ( )4 3 2
15 8 5 1s
G ss s s s
+=
+ + + +.
3. Resolver Exercício 5 da página 117 do (NISE, 2002).
4. Resolver Exercício 10 da página 118 do (NISE, 2002).
5. Resolver Exercício 12 da página 118 do (NISE, 2002).
6. Resolver Exercício 14 da página 118 do (NISE, 2002).
Resposta: (a) ( )325
1023 +++
=sss
sG ; (b) ( )157273
4523494923
2
+−−+−
=sss
sssG ; (c)
( )13319374823
23
2
−++−−
=ssssssG .
7. Resolver Exercício 18 da página 119 do (NISE, 2002).
Resposta: ( ) xxx
=
+
−−−
= 01;00
100010
33
2
3
1
3
0 a
b
aKKyt
KK
KK
KK
KK
δ .
8. Resolver Exercício 21 da página 120 do (NISE, 2002).
9. Resolver Exercício 22 da página 120 do (NISE, 2002).
Resposta: ( ) ( )( )( )( )9034,47834,114
128,848647,106,272 2
1 +−+++−
=ssssssG ; ( ) ( )
( )( )( )9034,47834,114554,171,507
2 +−++−
=sss
ssG .
10. Resolver Exercício 24 da página 121 do (NISE, 2002).

Automação e Controle I - Lista de Exercícios Suplementares 3 – Professor Marcio Eisencraft – novembro 2006
2
Resposta: ( )
[ ]x
xx
0009491,00581,0000
302,9406558,7406100029,142,76929,149353
0010
=
+
−−
−−=
y
tfcima
11. Resolver Exercício 1 da página 170 do (NISE, 2002).
12. Resolver Exercício 2 da página 170 do (NISE, 2002).
Resposta: ( ) ( )( )( )( )9034,47834,114
128,848647,106,272 2
1 +−+++−
=ssssssG ; ( ) ( )
( )( )( )9034,47834,114554,171,507
2 +−++−
=sss
ssG .
13. Resolver Exercício 7 da página 170 do (NISE, 2002).
14. Resolver Exercício 9 da página 170 do (NISE, 2002).
15. Resolver Exercício 10 da página 170 do (NISE, 2002).
Resposta: ( ) 4179,9;7347,0;683,9 :pólos;6791
1777136523
2
−+−−
−+=
ssssssG
16. Resolver Exercício 11 da página 170 do (NISE, 2002).
17. Resolver Exercício 13 da página 170 do (NISE, 2002). (Ao primeiro aluno que entregar
a solução completa e correta deste exercício será acrescentado 0,5 ponto à nota da
prova PAF).
18. Resolver Exercício 25 da página 171 do (NISE, 2002).
Resposta: (a) ( )2
135 11
G ss s
=+ +
; (b)
0,7538; 11; % 2,722%; 1,6s; 1,44s; 0,6963sn S P RUP T T Tζ ω= = = = = = .
19. Resolver Exercício 26 da página 171 do (NISE, 2002).
Resposta: (a)( )
( )
22
11
sT s s sΘ
=+ +
; (b) 16,30%; 8s e 3,627s respectivamente.
20. Resolver Exercício 29(a) da página 171 do (NISE, 2002).

Automação e Controle I - Lista de Exercícios Suplementares 3 – Professor Marcio Eisencraft – novembro 2006
3
Resposta: ( )7537,5
G ss
=+
.
21. Resolver Exercício 40 da página 173 do (NISE, 2002).
22. Resolver Exercício B.3.10 da página 121 do (OGATA, 2003).
Resposta: ( )2 5 7s
G ss s
=+ +
.
23. (DORF; BISHOP, 2001, p. 98) Uma impressora a laser usa um raio de laser para impri-
mir cópias rapidamente de um computador. O laser é posicionado por uma entrada de con-
trole, ( )r t , de forma que
( )( )
( )25 10060 500s
Y s R ss s
+=
+ +. (1)
A entrada ( )r t representa a posição desejada para o raio de laser.
(a) Se ( )r t for um degrau unitário, encontre a saída ( )y t .
(b) Qual o valor final de ( )y t ?
Resposta: (a) ( ) 50 101 0,125 1,125 , 0t ty t e e t− −= + − ≥ ; (b) 1.
24. (DORF; BISHOP, 2001, p. 164) Um sistema é descrito no espaço de estados por:
1 1 1 0
4 3 0 0
2 1 10 1
20 30 10
u
y
− = + − =
x x
x
. (2)
Determine ( )( )
( )
Y sG s
U s= .
Resposta: ( )
2
3 210 60 7014 37 20s s
G ss s s
− −=
− + +.
25. (DiSTEFANO et al., 1990, p. 138) Obtenha a função de transferência ( ) ( )( )sVsV
sGI
O= do
compensador por atraso/avanço de fase implementado através de uma rede RC mostrada
na figura a seguir.

Automação e Controle I - Lista de Exercícios Suplementares 3 – Professor Marcio Eisencraft – novembro 2006
4
(DISTEFANO et al., 1990).
Resposta: ( )
( )
2
2 2 1 1 1 1 2 2
2
2 2 1 1 2 1 1 1 2 2
1 1 1
1 1 1 1O
I
s sV s R C RC RC RCV s
s sR C RC RC RC RC
+ + + =
+ + + +
.
26. (DORF; BISHOP, 2001, p. 78) Considere o sistema mecânico esboçado na figura a seguir.
A entrada é dada por ( )tf e a saída por ( )ty . Determinar a função de transferência de
( )tf para ( )ty e escrever uma seqüência de comandos Matlab que permita traçar a
curva da resposta a uma entrada degrau unitário. Considere 10=m , 1=k e 5,0=b .
(DORF; BISHOP, 2001, p. 78)

Automação e Controle I –Trabalho 1 – Professor Marcio Eisencraft – agosto 2006
Automação e Controle I
Trabalho 1 – 2º semestre 2006 - Sensores
Este trabalho vale 0,5 ponto somado à nota da Prova P1.
Instruções:
Deve ser entregue impreterivelmente até o dia 05/09 – data da P1
Em folha de papel A4 MANUSCRITO, com nome e número de matrícula. A resposta
não pode ultrapassar 1 página. Caso qualquer uma dessas condições não seja atendida, o
trabalho não será aceito.
Cada aluno deve resolver e entregar a APENAS a questão cujo número coincide com o
dígito do seu número de matrícula.
O assunto do trabalho, sensores, é matéria para a P1. Uma dessas questões pode cair na
prova.
Entre outras, uma possível referência a ser utilizada para resolver as questões é:
PAZOS, F. Automação de sistemas & robótica. Rio de Janeiro: Axcel Books, 2002. Capí-
tulo 4.
0. O que são transdutores? O que são sensores?
1. Qual a diferença entre sensores analógicos e digitais?
2. Explique as seguintes características dos sensores: faixa, resolução, sensibilidade, lineari-
dade, histerese.
3. Explique o funcionamento e dê exemplos de sensores de temperatura.
4. Explique o funcionamento e dê exemplos de sensores de presença.
5. Explique o funcionamento e dê exemplos de sensores de posição.
6. Explique o funcionamento e dê exemplos de sensores de força.
7. Explique o funcionamento e dê exemplos de sensores de velocidade.
1

Automação e Controle I –Trabalho 1 – Professor Marcio Eisencraft – agosto 2006
8. Explique o funcionamento e dê exemplos de sensores de luz.
9. Explique o funcionamento e dê exemplos de sensores de pressão.
2
Automação e Controle I –Trabalho 2 – Professor Marcio Eisencraft – setembro 2006
Automação e Controle I
Trabalho 2 – 2º semestre 2006
Tecnologias associadas à automação
Este trabalho vale 0,5 ponto somado à nota da Prova P2
Instruções:
Deve ser entregue impreterivelmente até o dia 10/10 – data da P2
Em folha de papel A4 MANUSCRITO, com nome e número de matrícula. A resposta
não pode ultrapassar uma folha. Caso qualquer uma dessas condições não seja atendida,
o trabalho não será aceito.
Cada aluno deve resolver e entregar a APENAS as seguintes questões de acordo com o
dígito do seu número de matrícula:
0 – 1 e 16
1 – 2 e 15
2 – 3 e 14
3 – 4 e 13
4 – 5 e 12
5 – 6 e 11
6 – 7 e 10
7 – 8 e 9
8 – 4 e 10
9 – 6 e 12
As questões se referem ao livro:
SILVEIRA, P. R; SANTOS, W. E. Automação e controle discreto, 2a edição. São Paulo:
Érica, 1999. Página 209.
1

Automação e Controle I –Trabalho 3 – Professor Marcio Eisencraft – novembro 2006
1
Automação e Controle I
Trabalho 3 – 2º semestre 2006
Tecnologia e sociedade
Este trabalho vale 0,5 ponto somado à nota da Prova PAF
Instruções:
Deve ser entregue impreterivelmente até o dia 28/11 – data da PAF
Em folha de papel A4 MANUSCRITO, com nome e número de matrícula. A resposta
não pode ultrapassar 1 página. Caso qualquer uma dessas condições não seja atendida, o
trabalho não será aceito.
Cada aluno deve resolver e entregar a APENAS a seguinte questão de acordo com o dí-
gito do seu número de matrícula:
Dígito 0 – Questão 1
Dígito 1 – Questão 2
Dígito 2 – Questão 3
Dígito 3 – Questão 4
Dígito 4 – Questão 5
Dígito 5 – Questão 6
Dígito 6 – Questão 7
Dígito 7 – Questão 8
Dígito 8 – Questão 9
Dígito 9 – Questão 10
As questões se referem ao livro:
SILVEIRA, Paulo Rogério da; SANTOS, Winderson E. dos. Automação e controle dis-
creto. 2. ed. São Paulo: Érica, 1999. 229 p. : il. ; 24 cm ISBN 85-7194-591-8. Páginas 31
e 32.





























