Embed Size (px)
Citation preview

Alexandra Tran BMW GROUP
AUTOMATED VERIFICATION OF AUTOMOTIVE INFOTAINMENT
AGENDA
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 2
1. BMW Autonomous Driving
2. Assisted Driving View (ADV)
3. Conventional Testing
4. Lab Verification Methods
5. Future Strategy
6. MATLAB Demonstration
7. Questions & Answers
AUTONOMOUS DRIVING
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 3
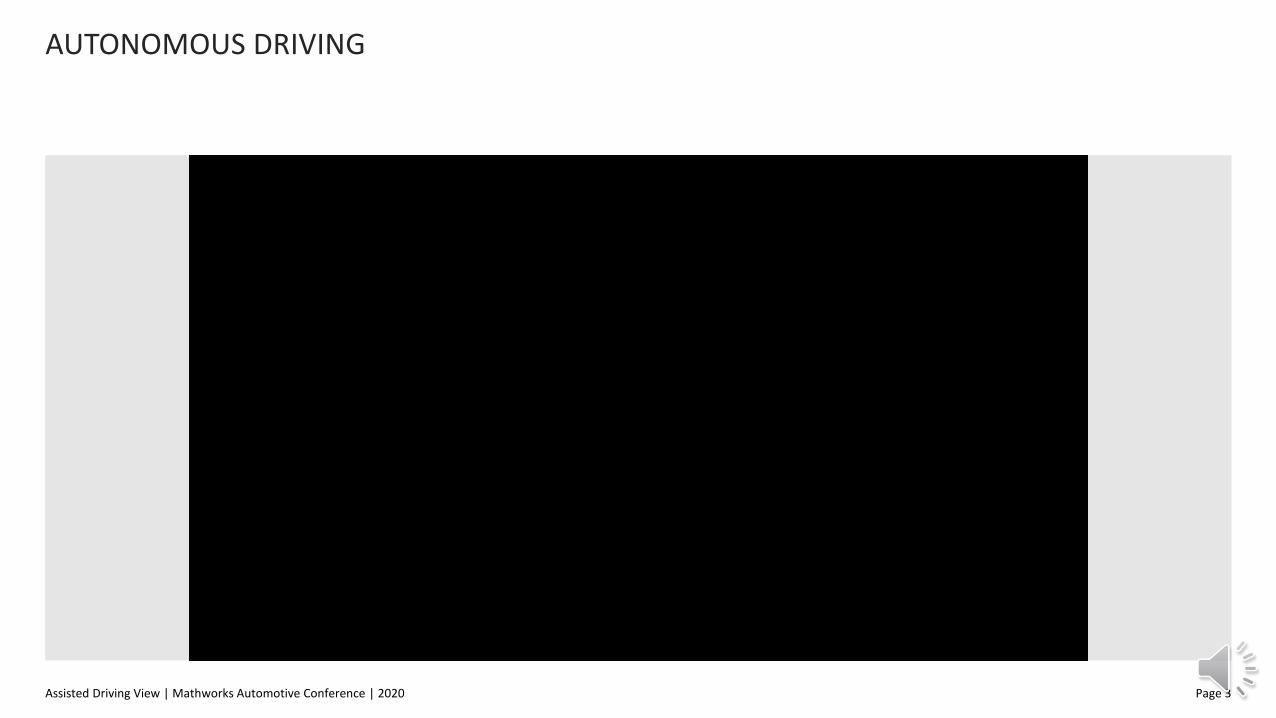
Visualise Real-Time Traffic
Secure Driver Trust
ASSISTED DRIVING VIEW
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 4
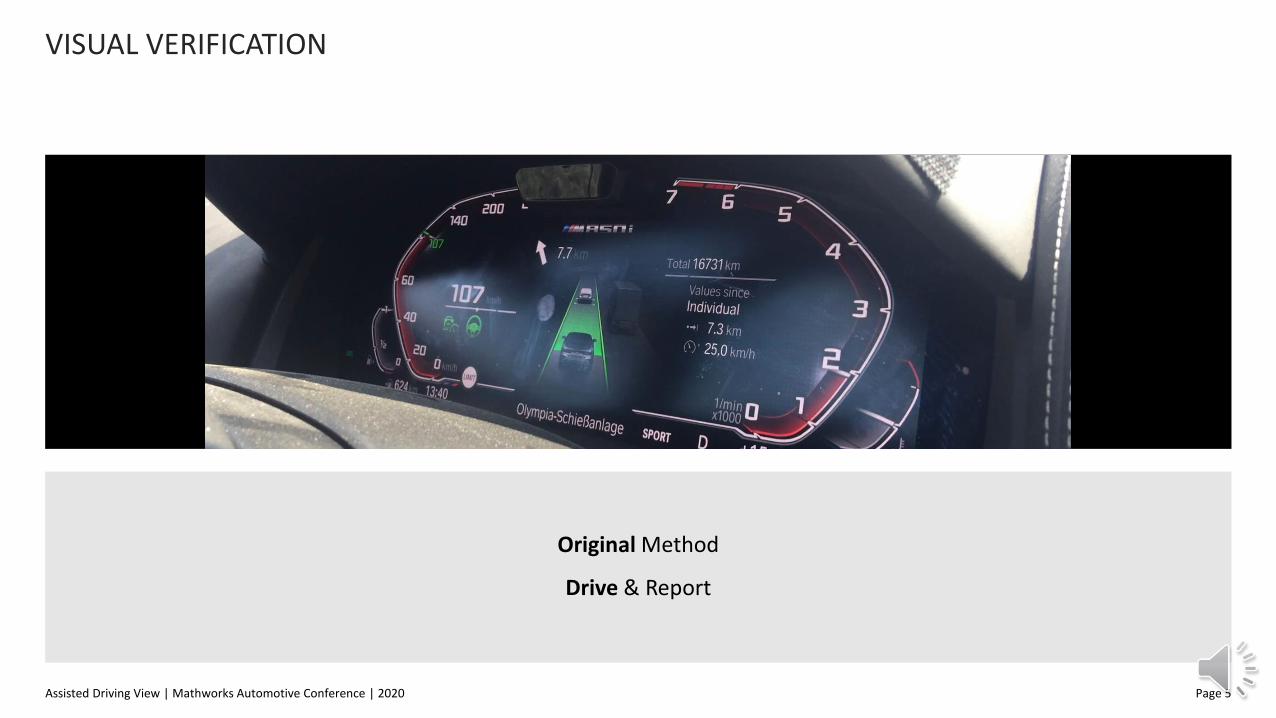
VISUAL VERIFICATION
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 5
Original Method
Drive & Report
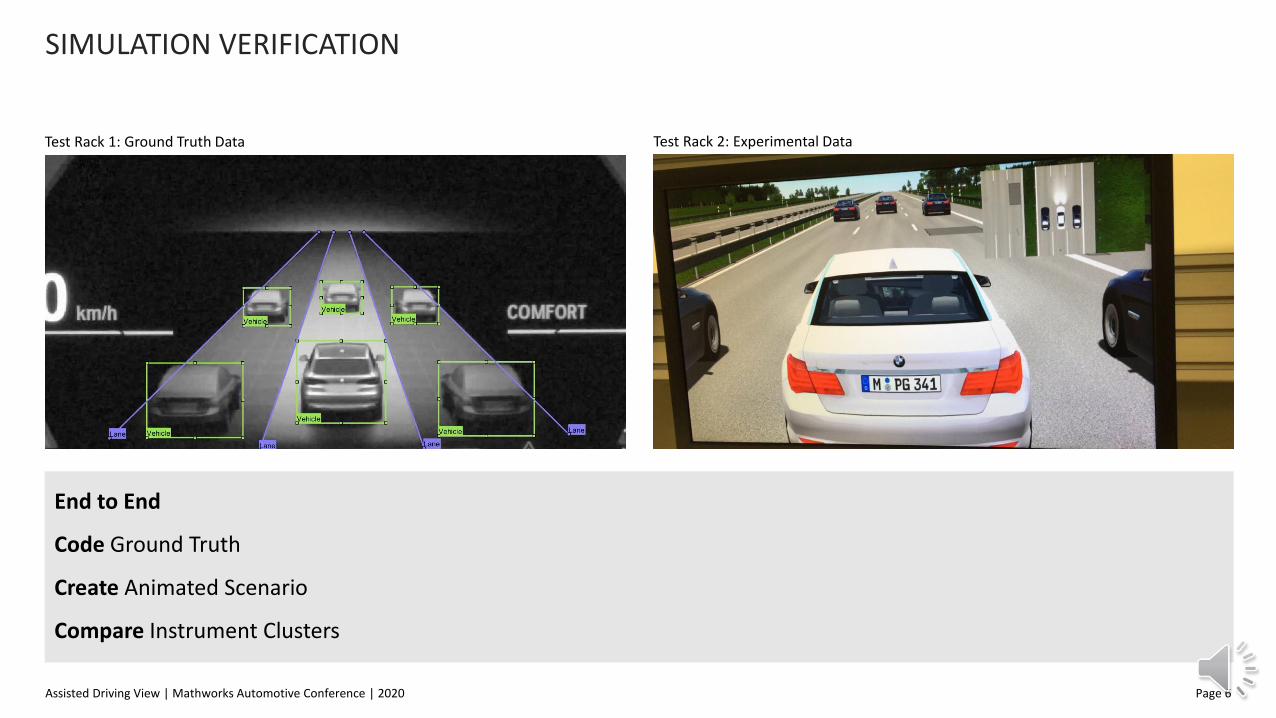
End to End
Code Ground Truth
Create Animated Scenario
Compare Instrument Clusters
Test Rack 1: Ground Truth Data
SIMULATION VERIFICATION
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 6
Test Rack 2: Experimental Data
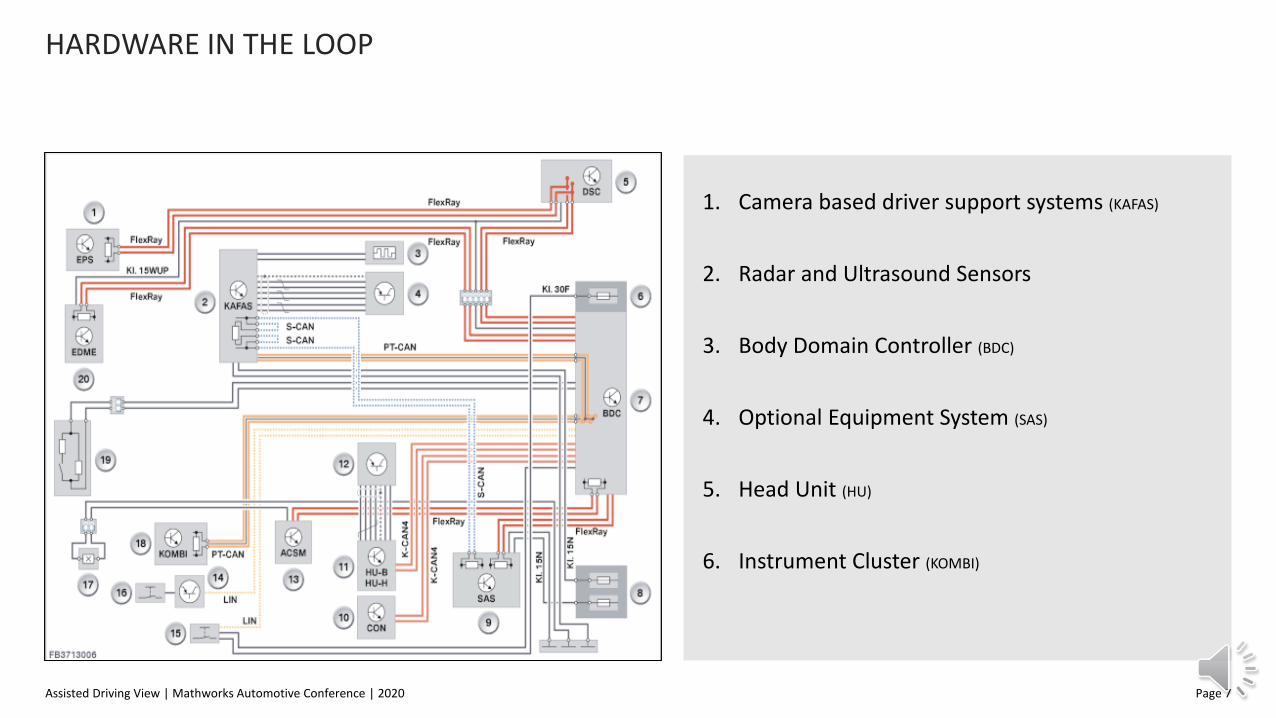
HARDWARE IN THE LOOP
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 7
1. Camera based driver support systems (KAFAS)
2. Radar and Ultrasound Sensors
3. Body Domain Controller (BDC)
4. Optional Equipment System (SAS)
5. Head Unit (HU)
6. Instrument Cluster (KOMBI)
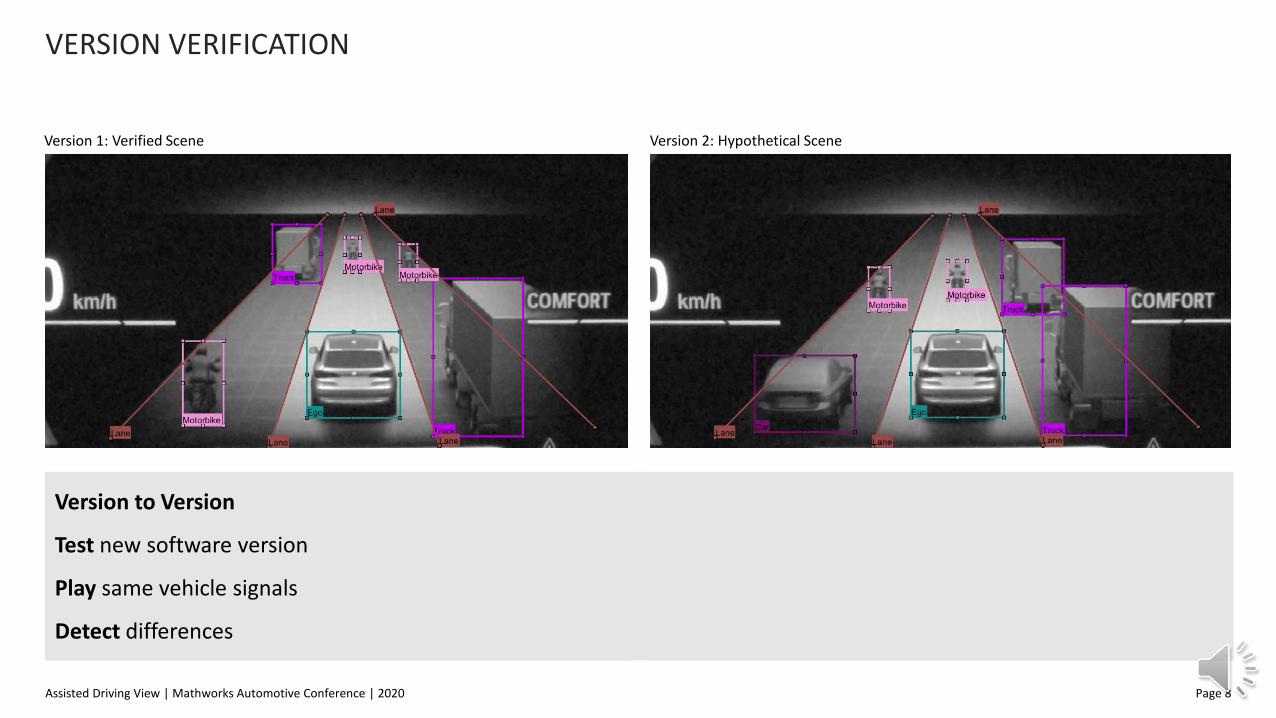
VERSION VERIFICATION
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 8
Version 1: Verified Scene Version 2: Hypothetical Scene
Version to Version
Test new software version
Play same vehicle signals
Detect differences
Real Traffic vs Assisted Driving View
Deep Learning Implementation
FUTURE VERIFICATION
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 9
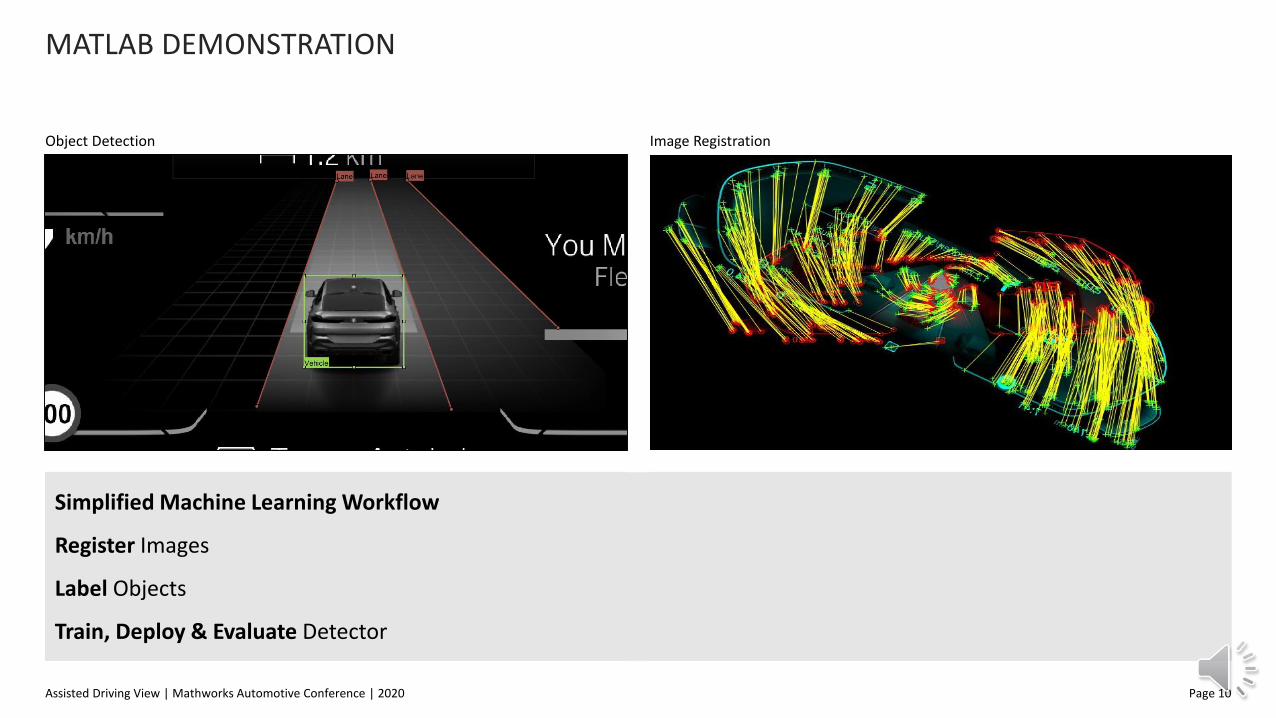
Simplified Machine Learning Workflow
Register Images
Label Objects
Train, Deploy & Evaluate Detector
MATLAB DEMONSTRATION
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 10
Object Detection Image Registration
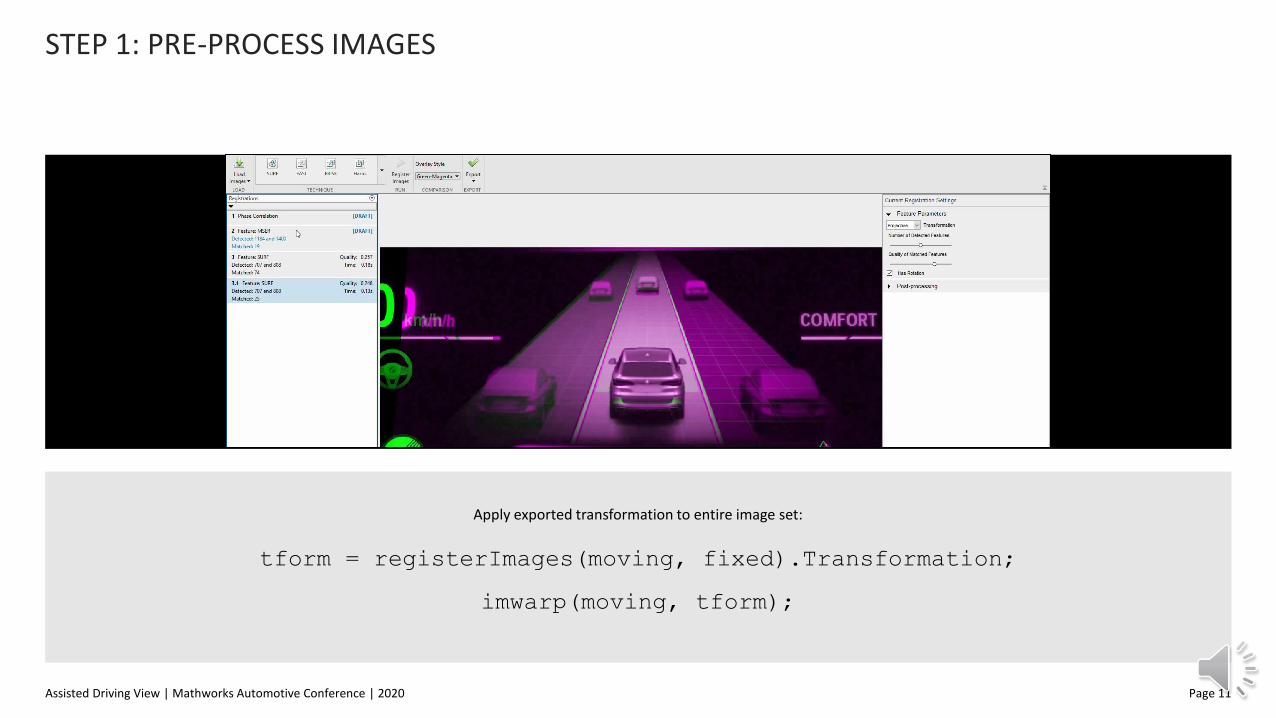
STEP 1: PRE-PROCESS IMAGES
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 11
Apply exported transformation to entire image set:
tform = registerImages(moving, fixed).Transformation;
imwarp(moving, tform);
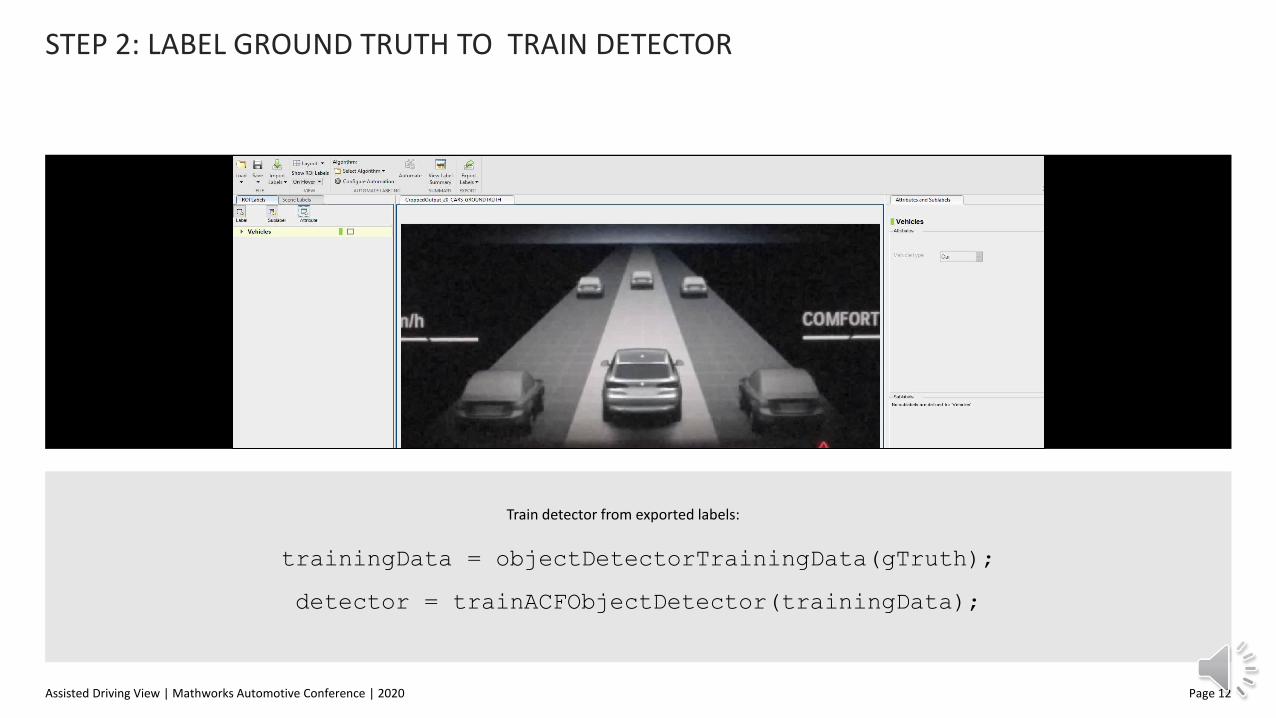
STEP 2: LABEL GROUND TRUTH TO TRAIN DETECTOR
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 12
trainingData = objectDetectorTrainingData(gTruth);
detector = trainACFObjectDetector(trainingData);
Train detector from exported labels:
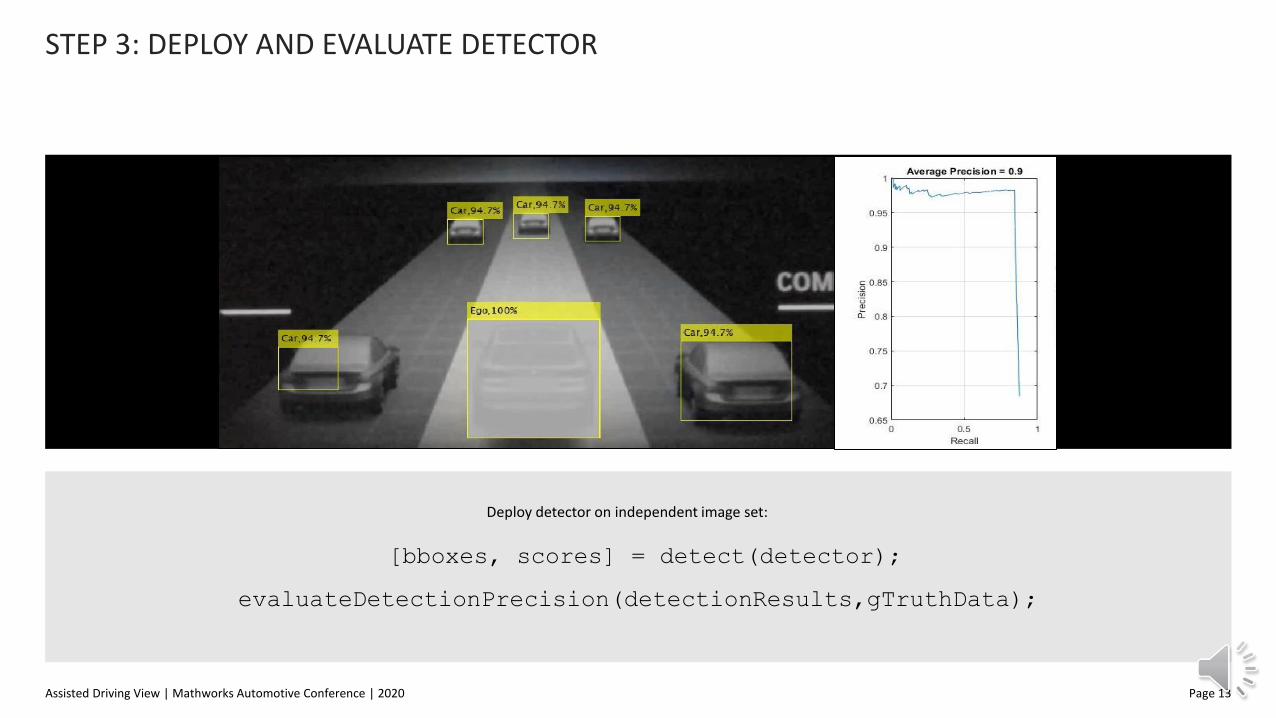
STEP 3: DEPLOY AND EVALUATE DETECTOR
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 13
Deploy detector on independent image set:
[bboxes, scores] = detect(detector);
evaluateDetectionPrecision(detectionResults,gTruthData);
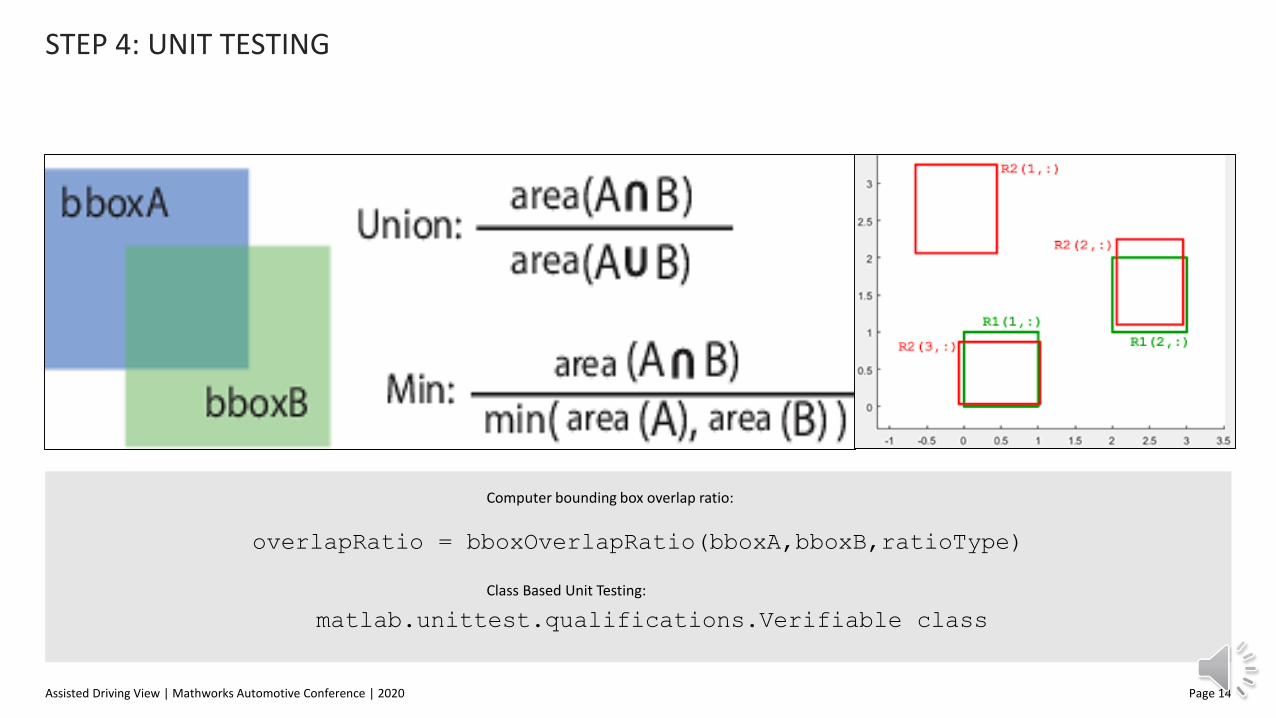
STEP 4: UNIT TESTING
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 14
Computer bounding box overlap ratio:
overlapRatio = bboxOverlapRatio(bboxA,bboxB,ratioType)
Class Based Unit Testing:
matlab.unittest.qualifications.Verifiable class
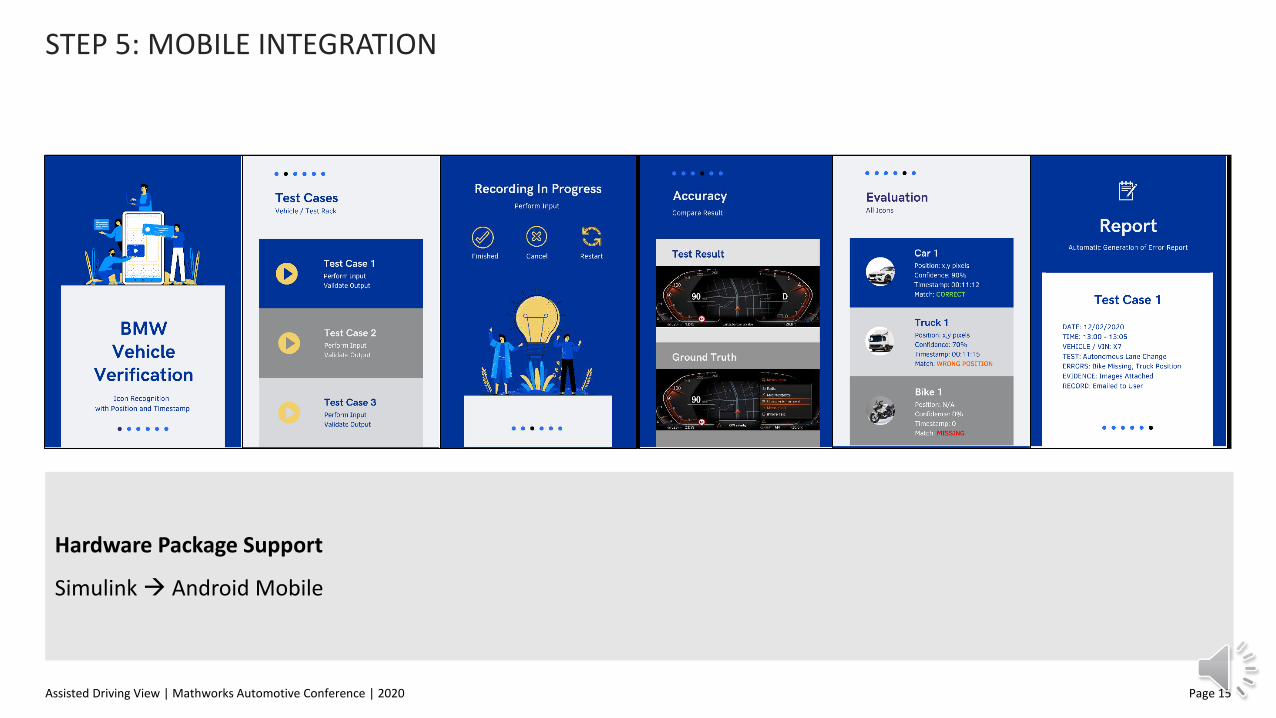
Hardware Package Support
Simulink → Android Mobile
STEP 5: MOBILE INTEGRATION
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 15

SUMMARY
Assisted Driving View | Mathworks Automotive Conference | 2020 Page 16
1. Computer Vision offers improved speed,
accuracy and reliability.
2. Lab Simulations facilitate controlled,
reproducible data collection.
3. Machine Learning Workflow:
a. Collecting, Preprocessing & Labelling Data
b. Training, Deploying, & Evaluating Model

AUTOMOTIVE CONFERENCE
Assisted Driving View | Mathworks Automotive Conference | 2020 Seite 17
Q&A
BMW GroupAlexandra TranIntegration and ValidationOnboard Platform
Forschungs- und InnovationszentrumKnorrstraße 147 80788 München
Special thanks to:
Michael KoczurDr Stefan FikarDr Alexander BehringDr Tim FrickeDr Marcus MartinusThomas Konschak
Simone HaemmerleMichael GlasserShashank SharmaDominic Dall’OstoDr Michael MilfordDr Frederik Naujoks