Embed Size (px)
Citation preview

Automatic subbottom characterization based on visual features
Cristian MOLDER, Mircea BOSCOIANU, Mihai I. STANCIU, Iulian C. VIZITIUMilitary Technical Academy
Department of Electronics and InformaticsGeorge Cosbuc Street 81-83, Bucharest
[email protected], mircea [email protected]
Abstract: The ocean subbottom characterization is based mainly on the processing of a received echo from a sonarbased equipment. This signal is further analysed by a geologist in order to visually characterize the sedimenttype. No automatic processing is actually implemented and, therefore, the classification process is difficult andtime consuming. In this article we propose a semiautomatic classification based in pseudoimages created fromthe acoustic signals. An a priori classification of sediments based on their visual artifacts is made. Two mainfeatures are extracted and used as inputs for a subbottom classifier. Experimental data and results as well as furtherimprovements are presented.
Key–Words: Subbottom, Texture analysis, Neural network, Active contour, Acoustics
1 Introduction
Subbottom acoustic profiling is based on the emissionof a modulated or a bandwidth low-frequency signal(usually in the 0.5 - 100 kHz band) followed by theanalysis of the received signal from the sea floor. Theresponse is influenced by the interaction between theacoustic wave and the sedimentary structure. Someauthors tried to model these interactions dependingon the particle size and spatial arrangement, the layerpressure, or the saturation percentage [4, 8]. Unfortu-nately, these models cannot include all the interactionsthat occur in the geological structure complexity.
Nowadays, most of the monodimensional low-frequency sub-bottom seismic recordings using a spe-cialized sonar are interpreted by a human geologicalexpert by reading from a display or a printed paper.Therefore, we try to create an automatic algorithmto eliminate the human expertise by transposing hisfuzzy reasoning into new features.
Following discussions with geological experts,the two main visual characteristics observed by a dataanalyzer are the geometric shape of the sea bottom(horizons) and the sub-bottom aspect of the sedimentstructures. Using this information, two feature setscan be obtained. The next section presents the visualcharacteristics of the main sediment classes based onhuman expert fuzzy reasoning. The two proposed fea-ture sets are explained in the second part of the paper.The last section contains experimental results, conclu-sion and further work.
2 Expert visual characterization
In the sea, uncountable sedimentary level configu-rations can be observed. The acoustic response isbased on the interaction between the incident waveand the sediment geological characteristics (particleshapes and sizes, layer structure). The response is alsoclearer when the impedance difference between twolayers is bigger. For sedimentary layers with homo-geneous structure and composition, the acoustic re-sponse is also homogeneous and uniform along thewhole layer. Because of physical and chemical inter-actions with the sea (tides, waves, streams, sea plantsand animals), as well as the human intervention, thosestructures can be modified. Some of the examples arepresented in figures 1-3. The images are extractedfrom data obtained in different oceanic expeditions.
Based on the previous observations made by hu-man experts, we can create two fuzzy features that willserve in an automatic sediment characterization sys-tem. The first feature characterize the horizon shapeand is extracted as a contour. The second feature isspecific for the acoustic response of the sediment be-low the horizon and is extracted as a texture.
For every main type of sediment there is an as-sociated configuration of the two fuzzy features, pre-sented in Table 1. Using these information, quantita-tive features must be extracted from the acoustic re-sponse.
Proceedings of the 1st WSEAS International Conference on VISUALIZATION, IMAGING and SIMULATION (VIS'08)
ISSN: 1790-2769 41 ISBN: 978-960-474-022-2

Table 1: Sediment characterization using textural (acoustic response) and geometrical (horizon) fuzzy featuresSediment type Acoustic response Horizon geometryMud Very clear, permeable Mostly horizontal, smoothFine sand Clear, permeable Mostly horizontal, smoothSand Slightly clear Mostly horizontal, smoothRock Slightly clear, impermeable All configurations, roughGrit Slightly clear Mostly horizontal, smoothSalt Slightly clear, few reflections Hyperbolic, isolated (dunes)Gas Opaque, no reflections Isolated structuresPeat Opaque, no reflections Mostly horizontal, smooth
Figure 1: Sedimentary structure on multiple layers(sand)
Figure 2: Surface agglomeration (sand) on a hardlayer (rock)
3 Acoustic image analysisTo analyze an acoustic response, pseudo-images areformed from mono-dimensional echoes. As the sonaris running at a constant speed and in a straight di-rection, the echoes are concatenated to form a matrixwhich is further used as an acoustic image.
From the resulting acoustic image, two main at-tributes are considered. The first is represented by theshape of the sea-bottom (the horizon) and the secondis based on the textural information which is situatedunder the horizon (Figure 5).
3.1 Sediment contour features
Using the shape of the sea bottom horizon, contour-based features can be extracted. Therefore, we needfirst to extract the contour from the acoustic images.The free-form active contours [1, 2, 7] are used to ob-tain an analytic description of the horizons. The pos-
Figure 3: Sand dunes and sand depots on rock layer
sible use of the contour parameters represents an ad-vantage.
The free-form active contour is described usingpiecewise cubic polynomial segments yi(x). The cu-bic form has the possibility of obtaining complexshapes with a minimum ripple comparing to higherdegree polynomials [3].
yi(x) = aix3 + bix
2 + cix+ di, (1)
where i is the segment index, and x takes values in theinterval [0, 1].
The active contour convergence is obtained byminimizing an objective function f(s) which takesinto account the curve variation limits and the acousticimage intensity.
f(s) = wifi(s) + wcfc(s), (2)
where f(s) is the global objective function, fi(s) isthe image-based local objective function, fc(s) is the
m-50 0 50 100 150 200 250 300 350 400 450
Imag
eE
cho
Figure 4: Construction of an acoustic image fromechoes. The mono-dimensional responses from thesonar are concatenated into a matrix which forms theacoustic image (90 degrees rotation left)
Proceedings of the 1st WSEAS International Conference on VISUALIZATION, IMAGING and SIMULATION (VIS'08)
ISSN: 1790-2769 42 ISBN: 978-960-474-022-2
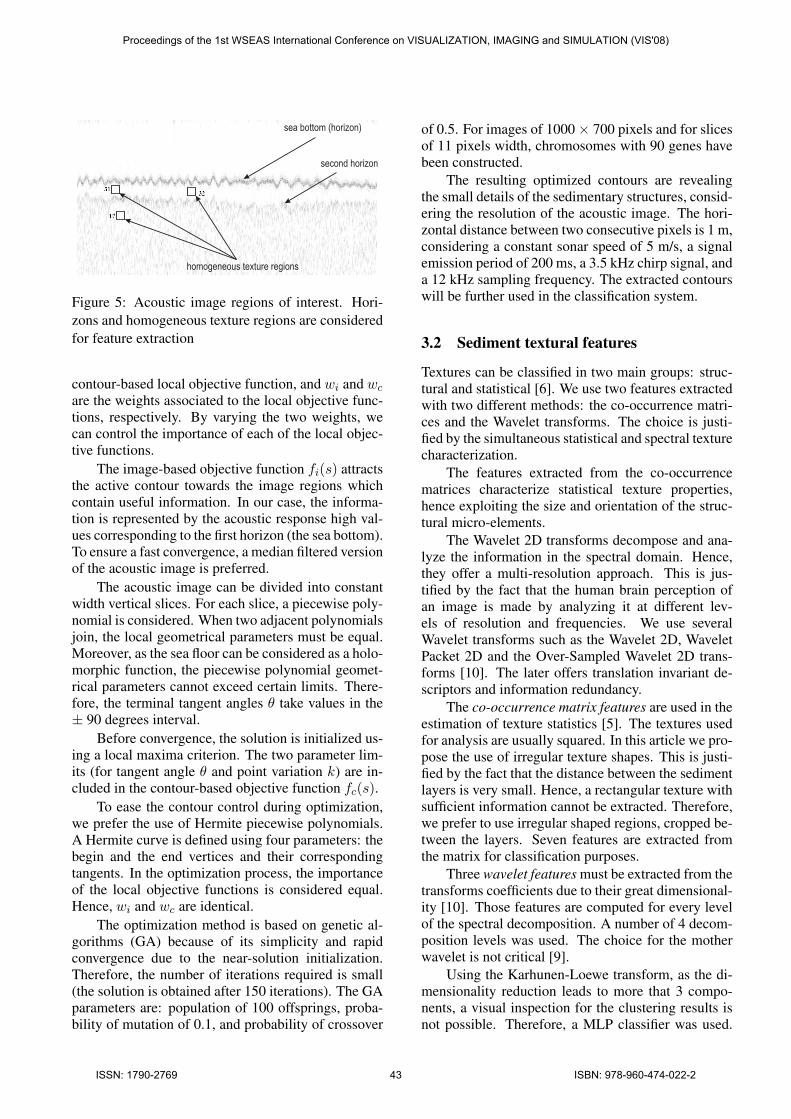
Figure 5: Acoustic image regions of interest. Hori-zons and homogeneous texture regions are consideredfor feature extraction
contour-based local objective function, and wi and wc
are the weights associated to the local objective func-tions, respectively. By varying the two weights, wecan control the importance of each of the local objec-tive functions.
The image-based objective function fi(s) attractsthe active contour towards the image regions whichcontain useful information. In our case, the informa-tion is represented by the acoustic response high val-ues corresponding to the first horizon (the sea bottom).To ensure a fast convergence, a median filtered versionof the acoustic image is preferred.
The acoustic image can be divided into constantwidth vertical slices. For each slice, a piecewise poly-nomial is considered. When two adjacent polynomialsjoin, the local geometrical parameters must be equal.Moreover, as the sea floor can be considered as a holo-morphic function, the piecewise polynomial geomet-rical parameters cannot exceed certain limits. There-fore, the terminal tangent angles θ take values in the± 90 degrees interval.
Before convergence, the solution is initialized us-ing a local maxima criterion. The two parameter lim-its (for tangent angle θ and point variation k) are in-cluded in the contour-based objective function fc(s).
To ease the contour control during optimization,we prefer the use of Hermite piecewise polynomials.A Hermite curve is defined using four parameters: thebegin and the end vertices and their correspondingtangents. In the optimization process, the importanceof the local objective functions is considered equal.Hence, wi and wc are identical.
The optimization method is based on genetic al-gorithms (GA) because of its simplicity and rapidconvergence due to the near-solution initialization.Therefore, the number of iterations required is small(the solution is obtained after 150 iterations). The GAparameters are: population of 100 offsprings, proba-bility of mutation of 0.1, and probability of crossover
of 0.5. For images of 1000× 700 pixels and for slicesof 11 pixels width, chromosomes with 90 genes havebeen constructed.
The resulting optimized contours are revealingthe small details of the sedimentary structures, consid-ering the resolution of the acoustic image. The hori-zontal distance between two consecutive pixels is 1 m,considering a constant sonar speed of 5 m/s, a signalemission period of 200 ms, a 3.5 kHz chirp signal, anda 12 kHz sampling frequency. The extracted contourswill be further used in the classification system.
3.2 Sediment textural features
Textures can be classified in two main groups: struc-tural and statistical [6]. We use two features extractedwith two different methods: the co-occurrence matri-ces and the Wavelet transforms. The choice is justi-fied by the simultaneous statistical and spectral texturecharacterization.
The features extracted from the co-occurrencematrices characterize statistical texture properties,hence exploiting the size and orientation of the struc-tural micro-elements.
The Wavelet 2D transforms decompose and ana-lyze the information in the spectral domain. Hence,they offer a multi-resolution approach. This is jus-tified by the fact that the human brain perception ofan image is made by analyzing it at different lev-els of resolution and frequencies. We use severalWavelet transforms such as the Wavelet 2D, WaveletPacket 2D and the Over-Sampled Wavelet 2D trans-forms [10]. The later offers translation invariant de-scriptors and information redundancy.
The co-occurrence matrix features are used in theestimation of texture statistics [5]. The textures usedfor analysis are usually squared. In this article we pro-pose the use of irregular texture shapes. This is justi-fied by the fact that the distance between the sedimentlayers is very small. Hence, a rectangular texture withsufficient information cannot be extracted. Therefore,we prefer to use irregular shaped regions, cropped be-tween the layers. Seven features are extracted fromthe matrix for classification purposes.
Three wavelet features must be extracted from thetransforms coefficients due to their great dimensional-ity [10]. Those features are computed for every levelof the spectral decomposition. A number of 4 decom-position levels was used. The choice for the motherwavelet is not critical [9].
Using the Karhunen-Loewe transform, as the di-mensionality reduction leads to more that 3 compo-nents, a visual inspection for the clustering results isnot possible. Therefore, a MLP classifier was used.
Proceedings of the 1st WSEAS International Conference on VISUALIZATION, IMAGING and SIMULATION (VIS'08)
ISSN: 1790-2769 43 ISBN: 978-960-474-022-2

Table 2: MLP classification testing results based on wavelet textural featuresTransform Topology Haar Db 3 Biortho 3.3 Symlet 4 Coiflet 1W2D 12:15:1 97.4% 97.7% 98.2% 97.8% 97.7%OSW2D 5:15:1 95.2% 98.9% 98.4% 98.6% 98.0%
The classification results are very encouraging, andconfirms the expectations (Table 2).
4 Conclusions and further work
The main target of this study was to demonstrate thepossibility of transposing the human expert fuzzy rea-soning into quantifiable measures. The two main sub-jective observations made by such an expert are the vi-sual characterization of the sea bottom using the hori-zon contour-like shape and the texture structure underthe corresponding horizon. Based on those remarks,two feature sets are proposed. The first is representedby the use of a parametric contour that best describesthe sea bottom horizons, and the second is the use oftextural features extracted from the acoustic image re-gion below the horizon.
The active contour represents a good method forthe extraction of a sub-bottom horizon. The layer canbe described as a holomorphic function. Hence, a cu-bic piecewise polynomial function is the best choice.The extracted contours best matches the horizon andthe visual inspection of the human expert has con-firmed this a priori supposition.
The co-occurrence matrix features are used asstructural descriptors and can easily reveal the differ-ences between the three major sediment classes: thesand, the mud, and the rock (see Figure ??). Othersediment classes may interfere, like the fine sand orother type of rocks. The proposed method can be eas-ily adapted to every horizon shape and is more suitablefor small dimension textures.
The use of Wavelet transforms has a large classi-fication score (see Table 2). Its deficiency related tothe previous feature subset is the large amount of timerequired for processing and the large dimensionalityof the resulted features. Therefore, a neural networkis used for classification and reduction purposes. Thechoice of the mother wavelet is not critical.
We estimate that the use of the new feature setsproposed in this article can lead to an automatic seafloor classification system. The approach is novel andcurrently no automatic alternative exist. Further stud-ies must be carried to integrate the features into afuzzy classification. Related to the contour, a new fea-ture set can be envisaged, which quantify the fuzzy-ness aspect of the contour.
Acknowledgements: This work was supported bythe SHOM Oceanographic Navy Service.
References:
[1] Laurent D. Cohen. On Active Contour Models andBalloons. Computer Vision, Graphics, and ImageProcessing, 53(2):211–218, Mar 1991.
[2] T. F. Cootes, C. J. Taylor, D. H. Cooper, and J. Gra-ham. Active Shape Models - Their Training and Ap-plication. Computer Vision and Image Understand-ing, 61(1):38–59, Jan 1995.
[3] James D. Foley, Andrie van Dam, Steven K. Feiner,and John F. Hughes. Computer Graphics. Principlesand Practice. Addison Wesley, 2nd edition, 1997.
[4] Cedric Gervaise, Nicolas Grangier, and Andre Quin-quis. Caracterisation de la lithologie sedimentairepar le coefficient d’attenuation. In 5eme Journeesd’Etude d’Acoustique Sous-Marine, Brest, France,Nov 2000.
[5] Rafael C. Gonzales and Richard C. Woods. DigitalImage Processing. Prentice Hall, 3rd edition, 2008.
[6] Robert M. Haralick. Statistical and StructuralAproaches to Texture. Proceedings of the IEEE,67(5):786–804, May 1979.
[7] Michael Kass, Andrew Witkin, and Demetri Ter-zopoulos. Snakes: Active Contour Models. Interna-tional Journal of Computer Vision, 1:321–331, 1987.
[8] Claire-Sophie Maroni. Determination automatiquede la stratification des fonds sous-marins a l’aided’un sondeur de sediments. Ph.D. Thesis, UniversiteBretagne Occidentale, Brest, France, 1997.
[9] Aleksandra Mojsilovic, Miodrag V. Popovic, and De-jan M. Rackov. On the Selection of an OptimalWavelet Basis for Texture Characterization. IEEETransactions on Image Processing, 9(12):2043–2050,Dec 2000.
[10] P. Scheunders, S. Lievens, G. Van de Wouwer,P. Vautrot, and D. Van Dyck. Wavelet-based Tex-ture Analysis. International Journal Computer Sci-ence and Information management, 1:22–34, 1998.
Proceedings of the 1st WSEAS International Conference on VISUALIZATION, IMAGING and SIMULATION (VIS'08)
ISSN: 1790-2769 44 ISBN: 978-960-474-022-2
![Research Article Characterization of Visual Symptomatology ...known as binocular instability [ ]), basic esophoria, and basic exophoria. With these considerations, patients were grouped](https://img.pdfslide.net/doc/110x75/603c0f210f688868406434ab/research-article-characterization-of-visual-symptomatology-known-as-binocular.jpg)




























