-
SVEUILITE U MOSTARU
FAKULTET STROJARSTVA I RAUNARSTVA
AUTOMOBILSKI MEHATRONIKI
SUSTAVI
UVOD
Mr.sc. Miroslav Grubii, dipl. ing. stroj.
Mostar, oujak 2014.
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
1 Mr.sc. Miroslav Grubii
2. SUSTAVI S ELEKTRONIKIM UPRAVLJANJEM
2.1. Komponente sustava s elektronikim upravljanjem
Izvri li se usporedba modernih motornih vozila dananjice sa
onima od prije 30 godina i ranije,
moe se zakljuiti da je osnovna funkcija ostala ista, omoguiti
pokretljivost ljudi i roba.
Osnovni raniji zahtjev korisnika motornih vozila je bio taj da
vozilo radi dugotrajno bez kvarova.
Taj zahtjev su veliki proizvoai automobila ve odavno ispunili,
to bi teoretski znailo
nastavak proizvodnje vozila bez velikih izmjena, dakle po ve
provjerenim principima.
Meutim, vremenom se javljao sve vei broj zahtjeva kako od strane
korisnika automobila tako i
sa strane zakonskih propisa. Zahtjevi poput ogranienja emisije
ispunih plinova, smanjenje
potronje pogonskog goriva, poveanje sigurnosti putnika u vozilu,
zatita putnika prilikom
prometne nezgode, poveanje komfora vonje (klima, navigacijski
sustav) i sl. doveli su do
velikih konstrukcijskih promjena pri proizvodnji automobila. Sve
ove i puno drugih zahtjeva
moderni automobili ne bi mogli realizirati bez primjene moderne
elektronike.
Suvremeni automobil kao jedan sloen sustav posjeduje veliki broj
elektroniki upravljanih
sustava. Osnovne komponente tih sustava su iste bez obzira radi
li se o sustavu pogona, prijenosa
snage, sigurnosti, komfora ili informacija. Svaki automobilski
sustav s elektronikim
upravljanjem ima tri osnovne komponente, senzore, upravljaki
ureaj i aktuatore, a pored toga
posjeduje i vezu za komunikaciju s drugim sustavima kao i
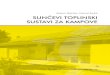
dijagnostikom ureaju. Na slici 2.1.
prikazani su temeljni elementi jednog elektroniki upravljanog
sustava u motornim vozilima.
Slika 2.1. Temeljni elementi sustava s elektronikim
upravljanjem
Upravljaki ureaj
Komunikacija s drugim sustavima
Dijagnostike informacije
Aktuatori
(izvrne aktivnosti)
Senzori
(ulazne vrijednosti)
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
2 Mr.sc. Miroslav Grubii
Senzori predstavljaju mjerne ureaje koji pretvaraju razliite
fizikalne veliine u elektrine
signale (pogodne za mjerenje) koji se zatim prosljeuju
upravljakom ureaju [6]. Ulazne
vrijednosti dobivene od senzora u analognom obliku se najprije
digitaliziraju u upravljakom
ureaju (raunalu), potom se vri obrada dobivenih signala i
usporedba s vrijednostima
pohranjenim u memoriji upravljakog ureaja. Nakon provedenih ovih
aktivnosti raunalo
aktivira izvrne lanove aktuatore i na taj nain vri upravljanje
radom elektronikih sustava
motornih vozila.
2.1.1. Senzori
Da bi se na ulaz u upravljaki ureaj doveo analogni signal koji
je posljedica promatranja neke
pojave potrebno je izvriti pretvorbu vrijednosti npr.
temperature, tlaka ili nekog drugog
fizikalnog ili kemijskog procesa u analogni signal. Takvi
pretvarai nazivaju se senzori, davai
ili osjetnici, a ponekad ih se naziva i mjernim pretvaraima.
Dakle, slue za pretvaranje
neelektrinih veliina u elektrine napone. Neke fizikalne veliine
ili stanja mogue je izravno
izraziti na digitalan nain, na primjer, paljenje svijetla u
vozilu pri otvaranju vrata ili paljenje
svjetla konica pri pritisku papuice konice. U tu svrhu moe
posluiti i obian prekida, pa je
takvo to teko nazvati senzorom, ali se uvijek klasificira u
skupini sa senzorima. Simbol senzora
prikazan je na slici 2.2.
Slika 2.2. Simbol senzora
U motornim vozilima ugraen je veliki broj razliitih senzora koji
mjere razliite vrste pojava,
stoga je radi lakeg snalaenja izvrena njihova klasifikacija i
podjela na skupine. Senzori se
mogu podijeliti prema razliitim kriterijima, tako da prema vrsti
izlaznog signala mogu biti:
- analogni
- binarni
- digitalni.
E Fizikalne veliine
E Elektrine veliine
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
3 Mr.sc. Miroslav Grubii
U ovisnosti o fizikalnom nainu rada senzori se dijele na:
- induktivne
- kapacitivne
- optike
- toplinske.
Osobine svakog senzora na najbolji nain su vidljive preko
njegovog dijagrama, pa prema vrsti
dijagrama izlaznog signala i mjerne veliine senzori mogu biti
s:
- neprekidnom linearnom karakteristikom
- neprekidnom nelinearnom karakteristikom
- prekidnom viestupanjskom karakteristikom
- prekidnom dvostupanjskom karakteristikom, (slika 2.3.).
Slika 2.3. Dijagrami senzora, mjerna veliina izlazni signal
(a) S X
(b) S X
(c) S X
(d) S X
S izlazni signal X mjerna veliina (a) neprekidna linearna (b)
neprekidna nelinearna (c) prekidna viestupanjska (d) prekidna
dvostupanjska (s histerezom)
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
4 Mr.sc. Miroslav Grubii
Prema opskrbi elektrinim naponom senzori se dijele na aktivne,
dakle one koji rade bez opskrbe
naponom i pasivne, one za iji rad je neophodna opskrba naponom.
Na slici 2.4. su prikazani
primjeri aktivnih senzora, a slika 2.5. prikazuje pasivne
senzore. Ova podjela senzora u praksi se
ne koristi tako esto.
Senzor kuta zakretanja
Senzor broja okretaja
Senzor nagiba
Slika 2.4. Aktivni senzori
Senzor ubrzanja (Crash senzor)
Mjera protoka zraka
Senzor razine tekuine
Slika 2.5. Pasivni senzori
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
5 Mr.sc. Miroslav Grubii
Najdetaljnija podjela senzora, a ujedno i najee koritena,
izvrena je prema njihovoj namjeni.
Razliite vrste potreba za dojavljivanjem i mjerenjem odreenih
veliina stanja kao to su
poloaj, brzina, tlak, protok, temperatura, snaga i slino, dovele
su do toga da se senzori
klasificiraju prema namjeni. U tablici 2.1. prikazana je takva
podjela senzora, a navedeni su i
osnovni predstavnici svake pojedine skupine.
Tablica 2.1. Podjela senzora prema namjeni
Skupine senzora prema namjeni Predstavnici skupine
Senzori poloaja Hall-ov senzor, senzor kuta zakretanja,
ultrazvuni senzor, GPS,
Senzori brzine vrtnje i brzine kretanja Senzor broja okretaja,
senzor okretanja oko osi,
Senzori ubrzanja i vibracija Senzor detonirajueg izgaranja u
motoru, senzor sustava zranih jastuka,
Senzori tlaka Senzor tlaka u usisnoj cijevi motora, senzor tlaka
goriva, senzor tlaka klima sustava,
Senzori protoka Mjera protoka mase zraka s vruim filmom u
usisnoj cijevi motora,
Senzori plinova i njihove koncentracije Lambda sonda, senzor
kvalitete zraka, NOx senzor,
Senzori temperature Senzor temperature rashladne tekuine motora,
senzor temperature ispunih plinova,
Senzori sile i okretnog momenta Senzor sile koenja, senzor
momenta zakretanja upravljaa,
Optiko-elektroniki senzori Senzor kie za vjetrobransko staklo,
senzor zaprljanosti prednjih svjetala,
Senzori koji se koriste u sustavima motornih vozila slijede
trend prema veoj integraciji
procesiranja u samom senzoru, tj. postoji tenja za postizanjem
veeg stupnja obrade signala
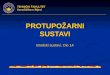
unutar samog senzora. Gledajui u tom pravcu, postoje etiri tipa
senzora ovisno o razini
senzorske integracije, slika 2.6. Konvencionalni sustav
predstavlja analogni senzor kod kojeg se
signal alje prema upravljakom ureaju putem jednostavnog ianog
sklopa. Ova tehnologija
vrlo je podlona interferenciji, tj. osjetljiva je na smetnje. U
prvom stupnju integracije senzora
obrada analognog signala zadatak je samog senzora, to smanjuje
podlonost smetnjama. Na
drugom stupnju integracije obrada signala takoer se vri unutar
senzora, ali pored te obrade
senzor provodi i pretvaranje analognog u digitalni signal.
Ovakav senzor je kompatibilan sa
sabirnicom podataka vozila (npr. CAN Bus) i stoga postaje
otporan na smetnje. Trei stupanj
integracije podrazumijeva senzor koji provodi obradu analognog
signala, pretvaranje signala iz
analognog u digitalni oblik, ali i ukljuuje inteligenciju u
obliku mikroraunala kao dijela
senzora. Zbog toga se ovakvi senzori nazivaju jo i "inteligentni
senzori". Oni takoer vre
razmjenu informacija sa sabirnicom podataka, a otporni su na
smetnje. Ispitivanje signala
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
6 Mr.sc. Miroslav Grubii
senzora treeg stupnja integracije ne moe se provoditi uobiajenim
mjernim ureajima, ve je
za to potrebna sofisticirana oprema.
Senzori Nain prijenosa podataka Upravljaki ureaj
Konvencionalni sustav
Osjetljiv na smetnje
(analogni)
SG
1. stupanj integracije
Neosjetljiv na
smetnje (analogni)
SG
2. stupanj integracije
Bus
Otporan na smetnje
(digitalni)
SG
3. stupanj integracije
Bus
Otporan na smetnje
(digitalni)
SG
SE senzori, SA Obrada signala, AD analogno-digitalni pretvara,
SG upravljaki ureaj, MC mikro raunalo
Slika 2.6. Stupnjevi integracije senzora
2.1.2. Upravljaki ureaj
Svaki elektroniki upravljani sustav u motornim vozilima
posjeduje svoj upravljaki ureaj
(njem. Steuergert SG, engl. Electronic Control Unit ECU). Strani
nazivi za upravljaki
ureaj se veoma esto koriste i u domaoj literaturi. Upravljaki
ureaj prima elektrine signale
od senzora koje potom koristi u obraunu u cilju dobivanje
izlaznih upravljakih signala koji se
prosljeuju aktuatorima. Bez obzira o kojem se elektronikom
sustavu vozila radi, struktura i
funkcija svakog upravljakog ureaja je ista. Pred upravljake
ureaje koji se ugrauju u
motorna vozila postavljeni su veoma veliki zahtjevi po pitanju
razliitih optereenja koja moraju
izdrati. Oni moraju sigurno i ispravno raditi u svim uvjetima
eksploatacije vozila, pa i u onim
najekstremnijim kao to su:
- vanjska temperatura od 40C do +60C
- nagla temperaturna promjena
- doticaj s pogonskim gorivom, uljima i dr.
- vlaan okoli
- mehanike vibracije koje proizvodi rad motora
- elektromagnetska polja.
SA AD SE
SE SA AD
SE SA AD
SE SA AD MC
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
7 Mr.sc. Miroslav Grubii
Iz ovih razloga, proizvodnja upravljakih ureaja za motorna
vozila je vrlo zahtjevna, a ureaji
su dosta skupi.
Elektroniki sklop upravljakog ureaja nalazi se u zatitnom
metalnom kuitu, a pojedini
upravljaki ureaji imaju kuite od otpornih umjetnih materijala.
Senzori i aktuatori se preko
snopova kabela, tj. elektrinih vodia, prikljuuju na upravljaki
ureaj preko viekontaktnog
konektora. Preko tog konektora vri se i opskrba naponom
upravljakog ureaja. Pojedini
upravljaki ureaji imaju vie od jednog viekontaktnog konektora.
Slika 2.7. prikazuje razliite
vrste upravljakih ureaja koji se koriste u sustavima motornih
vozila.
Upravljaki ureaj Diesel Motora Upravljaki ureaj elektrine mree
vozila
Upravljaki ureaj sustava komfora Upravljaki ureaj zranih
jastuka
Slika 2.7. Razliite vrste upravljakih ureaja u sustavima
motornih vozila
Elektrini signali senzora, koji se prosljeuju upravljakim
ureajima i njima predstavljaju
ulazne signale, mogu imati tri razliita oblika. Ti ulazni
signali mogu biti:
- analogni ulazni signali
- digitalni ulazni signali
- pulsni ulazni signali.
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
8 Mr.sc. Miroslav Grubii
Analogni ulazni signal moe biti bilo koja vrijednost napona iz
odgovarajueg podruja
mjerenja, na primjer masa zraka, tlak u usisnoj cijevi,
temperatura rashladnog sredstva i slino.
Analogni signal se mora pretvoriti u digitalni kako bi ga
upravljaki ureaj mogao dalje
obraivati.
Digitalni ulazni signal poznaje samo dva stanja 1 (High) i 0
(Low). Najbolji primjer ulaznog
digitalnog signala je obini prekida sa svoja dva stanja,
ukljueno (1) i iskljueno (0). Ovakav
signal moe se izravno preuzeti od strane upravljakog ureaja u
daljem postupku obrade
ulaznih signala.
Pulsni ulazni signal nastaje od induktivnih senzora koji donose
informacije o broju okretaja. Kod
ovakvih ulaznih signala upravljaki ureaj najprije provodi
suzbijanje impulsnih smetnji, a
potom ih pretvara u pravokutne digitalne signale.
Na slici 2.8. prikazan je postupak obrade signala u upravljakom
ureaju. Bez obzira o kojem
sustavu s elektronikim upravljanju se radi postupak obrade
signala unutar upravljakog ureaja
se provodi uvijek na isti nain.
Slika 2.8. Obrada signala u upravljakom ureaju
Unutar upravljakog ureaja nalazi se modul za pripremu signala,
iji je osnovni zadatak izvriti
pripremu ulaznih signala kako bi se mogla provesti njihova
daljnja obrada. Ovdje se svi ulazni
signali radi zatite ograniavaju na doputeni prag napona, potom
se vri filtriranje korisnog
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
9 Mr.sc. Miroslav Grubii
signala od smetnji, a ponekad je potrebno izvriti i pojaavanje
signala. Tako pripremljeni signali
se prosljeuju mikrokontroleru, najvanijem elementu svakog
upravljakog ureaja (slika 2.8.).
U ovisnosti o ranije opisanom stupnju integracije senzora (slika
2.6.), priprema signala se moe
djelomino ili u cijelosti odvijati unutar samog senzora.
Mikrokontroler upravlja odvijanjem zadanih funkcija unutar
upravljakog ureaja, a sainjavaju
ga slijedee meusobno povezane komponente:
- sredinja jedinica za obradu (CPU Central Processing Unit)
- ulazni i izlazni kanali
- programska memorija (ROM, EPROM ili Flash-EPROM)
- podatkovna memorija (RAM)
Sredinja jedinica za obradu ima dva glavna zadatka. Prvi je
obrada podataka, po emu je
jedinica i dobila ime. Obrada podataka ukljuuje obavljanje
aritmetikih i logikih operacija s
podacima, te druge mogue operacije na podacima koje se vre pod
nadzorom programa. Drugi
vaan zadatak je nadzor i usklaivanje djelovanja cjelokupnog
sustava. Svaki mikrokontroler
ima svoje ulazne i izlazne kanale, ija svrha je omoguavanje
prometa podataka. Preko ulaznih
kanala se primaju podaci od senzora, a ukoliko su ti podaci
analogni signali vri se
preusmjeravanje prema analogno-digitalnom pretvarau (A/D
pretvara). Preko izlaznih kanala
formirani izlazni signali se predaju modulu izlaznog stupnja.
Izlazni kanali takoer slue za
povezivanje sa drugim upravljakim ureajima, kao i sa vanjskim
dijagnostikim ureajem.
Mikrokontroleru je za njegov rad potreban radni program, to u
biti predstavlja software u obliku
binarnih brojevnih vrijednosti. Taj program je pohranjen u
programskoj memoriji (ROM), to
predstavlja memoriju u koju su jednom zapisani podaci da bi se
poslije mogli samo itati. Vrlo
esto se deava da se, nakon to je proizveden automobil, javi
potreba za izmjenom programa
upravljakog ureaja radi odreenih poboljanja sustava kojim ureaj
upravlja. Da bi se to
omoguilo mikrokontroler sadri Flash-EPROM memoriju, kod koje je
mogue elektrinim
putem izvriti brisanje podataka. Postupak se izvodi tako to se
eksterno raunalo (najee
dijagnostiki ureaj) spaja, preko dijagnostikog prikljuka u
vozilu, na upravljaki ureaj kojem
treba izmijeniti program i zahvaljujui Flash-EPROM memoriji
izvodi se reprogramiranje
postojeeg programa. Podatkovna memorija (RAM) je memorija
mikrokontrolera sa slobodnim
pristupom, u koji se mogu upisivati podaci i iz nje isti itati
onoliko puta koliko se to eli.
Meutim, ukoliko se upravljakom ureaju prekine napajanje
elektrinom energijom pohranjeni
podaci u RAM memoriji se gube. Stoga je potrebno, kod ponovne
uspostave opskrbe
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
10 Mr.sc. Miroslav Grubii
elektrinom energijom, izvriti pohranjivanje adaptacijskih
vrijednosti, kako bi sustav s
elektronikim upravljanjem radio ispravno.
U motornim vozilima postoje vane adaptacijske vrijednosti koje
se ne smiju izgubiti, pa ni
prilikom odvajanja upravljakog ureaja iz vozila ili u sluaju
prekida opskrbe naponom zbog
odvajanja akumulatora (baterije) vozila. Takve vrijednosti su
npr. kodovi sustava protiv krae
vozila i oni moraju biti pohranjeni u jednu trajnu memoriju.
EEPROM upravo predstavlja jednu
takvu memoriju, kod koje se elektronikim putem podaci mogu
brisati i ponovo programirati.
Stoga EEPROM predstavlja vanu komponentu unutar upravljakog
ureaja.
Upravljaki ureaj posjeduje i jedan modul za nadzor.
Mikrokontroler i modul za nadzor se
obostrano nadgledaju kroz jednu igru pitanja i odgovora. Ukoliko
se prepozna greka,
mikrokontroler i modul za nadzor mogu, neovisno jedan od drugog,
uvesti odgovarajuu
zamjensku funkciju.
Nakon obrade signala mikrokontroler generira izlazne signale. On
usmjerava izlazne signale na
modul izlaznog stupnja (komponenta unutar upravljakog ureaja,
slika 2.8.), koji obino
isporuuje dovoljno snage za izravno prikljuenje aktuatora.
Takoer postoji mogunost, da za
naroito velike potroae struje (npr, ventilator za hlaenje
motora) modul izlaznog stupnja
upravlja relejom koji ukljuuje odreeni aktuator. Modul izlaznog
stupnja je zatien od kratkog
spoja i od toplinskog preoptereenja.
Izlazni signal upravljakog ureaja predstavlja elektrini napon,
obino u rasponu od 0-5 V, a
zatim se ovaj napon podie, ukoliko je potrebno, u modulu
izlaznog stupnja kako bi se vrilo
ukljuivanje aktuatora. Druga vrsta izlaznih signala upravljakog
ureaja, koji se koriste za
ukljuivanje i pokretanje aktuatora, predstavljaju PWM signali
[16], [17] tj. pulsno irinska
modulacija (PWM Pulse Width Modulation). Pulsno irinska
modulacija je tehnika dobivanja
analognih vrijednosti preko digitalnih oblika. PWM signali su
pravokutnog oblika sa
konstantnom frekvencijom i promjenljivim vremenom ukljuenja,
(slika 2.9). Pravokutni signal
se mijenja izmeu dva stanja "ima signala" i "nema signala",
dakle ukljueno i iskljueno
(on/off). Ovaj nain rada moe uiniti simulaciju napona koji se
mijenja izmeu stanja kada
signal ima najviu vrijednost (5 V) i stanja kada signal ima
minimalnu vrijednost (0 V), tako da
se mijenja dio vremena u kojem ima signala i vremena u kojem
nema signala. Trajanje vremena
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
11 Mr.sc. Miroslav Grubii
u kojem ima signala naziva se irina pulsa. Dobivanje razliitih
analognih vrijednosti postie se
modulacijom irine pulsa.
Slika 2.9. Pulsno irinska modulacija (PWM)
Radni omjer pulsno irinske modulacije definiran je slijedeim
izrazom:
13
12
tt
tt
T
tU
(2.1)
Navedeni radni omjer izraava se u postocima i moe postii
vrijednost izmeu 0% i 100%,
ovisno o vrijednosti veliine tU. Zahvaljujui PWM izlaznim
signalima, omogueno je
upravljakom ureaju vrlo brzo i periodino ukljuivanje aktuatora u
tono odreeno vrijeme i
isto tako iskljuivanje aktuatora.
Pored spomenutih komponenti (hardware), vani segment svakog
upravljakog ureaja, bez
kojeg on ne bi mogao funkcionirati, je i njegov program
(software). Izrada programa za
upravljake ureaje u motornim vozilima odvija se u est faza:
- analiza potreba
- definiranje zadatka
- koncipiranje programa
T
tU
tU
T
t1 t2 t3 t4
t1 t2 t3 t4
T period tU vrijeme "ukljueno"
Vrijeme t
Napo
nski sig
nal
On
Off
On
Off
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
12 Mr.sc. Miroslav Grubii
- kodiranje u raunalnom jeziku
- osiguravanje ispravnosti i otklanjanje pogreaka
- rad i odravanje.
Navedenih est faza ne treba promatrati izolirano, jer izrada
programa esto zahtjeva ponavljanje
odreenih postupaka, nekad i vie puta.
2.1.3. Aktuatori
Unutar svakog elektroniki upravljanog sustava motornog vozila
aktuatori predstavljaju
neizostavne komponente. Aktuatori predstavljaju izvrne ureaje
koji pretvaraju jedan oblik
energije u drugi. Aktuatori su u principu ureaji koji elektrinu
i fluidnu energiju pretvaraju u
mehaniku energiju, kao to je kretanje i zakretni moment. Razina
izlazne energije mnogo je
vea od razine energije ulaznog signala u aktuator. Osnovna
klasifikacija aktuatora izvrena je
upravo prema principima promjene oblika energije, tako da se
aktuatori dijele na
elektromehanike, hidraulike, pneumatske i termike aktuatore
(slika 2.10).
Slika 2.10. Podjela aktuatora prema principima promjene oblika
energije
Elektromehaniki aktuatori su najee koriteni aktuatori u
sustavima motornih vozila s
elektronikim upravljanjem, a kod njih se upravljaki elektrini
signali pretvaraju u mehaniko
kretanje. Sastoje se iz tri dijela i to izvrnog motora (pogon),
mehanikog prijenosnika i izvrnog
elementa (zaklopka, ventil itd). Kada izvrni element obavlja
translacijsko kretanje, u svojstvu
mehanikog prijenosa koristi se puni prijenos ili nazubljena
letva, koji rotacijsko kretanje
motora pretvaraju u translacijsko kretanje radnog mehanizma.
Pored velike primjene
Aktuatori u motornim vozilima
Elektromehaniki Hidrauliki Pneumaski Termiki
Istosmjerni elektromotor, Korani elektromotor,
Elektromagnet,
Hidraulika pumpa, Hidrauliki ventil, Hidrauliki cilindar,
Regulacijski pneumatski ventil, Pneumatski regulator
zaklopki,
Bimetal, Termostat,
-
AUTOMOBILSKI MEHATRONIKI SUSTAVI - UVOD
13 Mr.sc. Miroslav Grubii
istosmjernih elektromotora za pogon aktuatora, korani motori
postaju sve popularniji kao
izvrni ureaji u motornim vozilima. Korani motor je elektromotor
bez etkica i svoju primjenu
nalazi kada je potrebno tono upravljanje brzinom i pozicijom.
Ovakvim motorima se moe
neposredno upravljati digitalnim raunalom, tj. upravljakim
ureajem odreenog sustava u
vozilu. Korani motori predstavljaju elektromehanike pretvarae
energije, koji pulsnu, odnosno
koranu elektrinu pobudu pretvaraju u korani mehaniki pomak
(odakle i potjee njihov
naziv), u rotacijsko ili translacijsko kretanje. Razlog sve vee
primjene koranih motora u
motornim vozilima lei u njegovim prednostima kao to su male
dimenzije, niska cijena, velike
funkcijske mogunosti, kut i brzina rotacije motora su
proporcionalni ulaznim impulsima,
jednostavna konstrukcija koja ne zahtjeva odravanje, velika
pouzdanost, dug ivotni vijek i
drugo. Iz skupine elektromehanikih aktuatora veliku primjenu u
motornim vozilima imaju i
elektromagneti, koji se najee koriste za aktiviranje razliitih
vrsta ventila. Upravo preko
elektromagnetnih aktuatora upravljaki ureaji u vozilu preuzimaju
aktivaciju odreenih
hidraulikih i pneumatskih ventila, pa je tako mogue odbaciti
tehniki veoma sloeno
hidrauliko i pneumatsko upravljanje.
S obzirom da postoji veliki broj aktuatora u motornim vozilima i
izvedbe tih aktuatora ovisno o
njihovoj funkciji su veoma razliite. Tako je radi boljeg
pregleda zgodno aktuatore podjeliti
prema klasama snage, kako je to prikazano u tablici 2.2.
Tablica 2.2. Podjela aktuatora prema klasama snage
Klasa snage Jakost elektrine struje
aktuatora I Predstavnici klase
Klasa I do 1 A Releji, analogni i digitalni pokazivai,
Klasa II od 1 A do 5 A Mali motori, npr. za podeavanje osvrtnih
ogledala, za podeavanje visine svjetlosnog snopa svjetala,
Klasa III od 5 A do 20 A Grijai za predgrijavanje Diesel motora,
motori ventilatora, grijai zadnjeg stakla,
Klasa IV iznad 20 A Grijai vjetrobranskog stakla, grijai za
predgrijavanje katalizatora,