Embed Size (px)
Citation preview
Autonomous Control of a Quadrotor
Mangal Kothari
Assistant Professor
Department of Aerospace Engineering
Indian Institute of Technology, Kanpur
Organization
• How does a quadrotor work ?
• Mathematical modeling
• Control
• An application
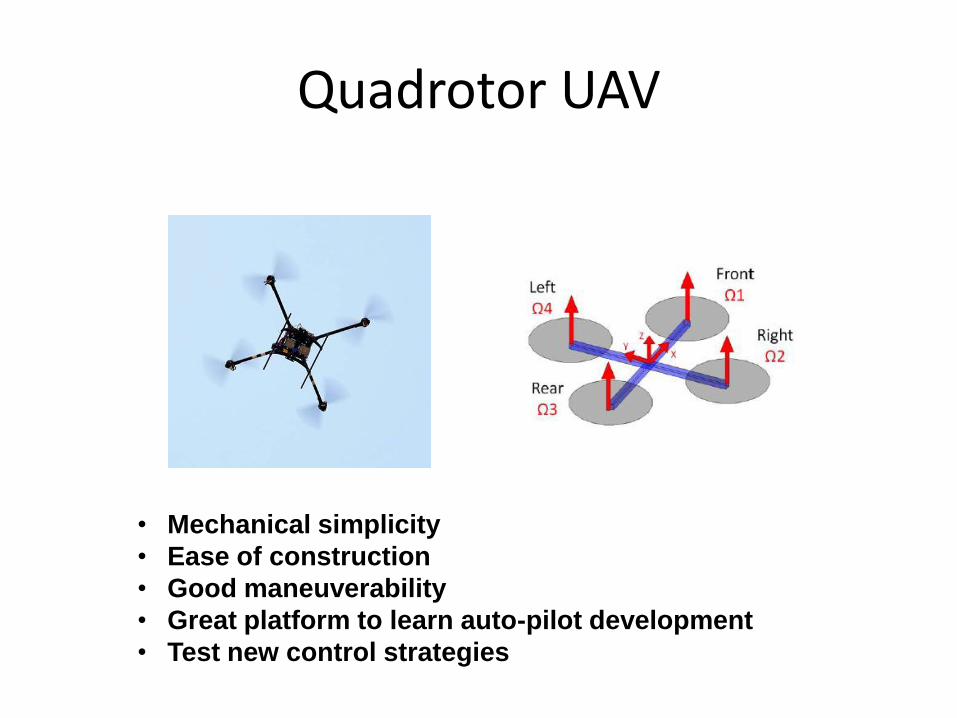
Quadrotor UAV
• Mechanical simplicity
• Ease of construction
• Good maneuverability
• Great platform to learn auto-pilot development
• Test new control strategies
Mechanics
• Four propellers generating four thrust forces and torques
• Two possible configuration ``+’’ and ``x’’
• One set of the propellers (1 and 3) rotates in clockwise direction and another set of the propellers in anti-clockwise direction
• For hovering flight, thrust and torque balance are achieved
Hovering Condition
• Thrust balance
• Moment balance
• Torque balance (w1^2+w3^2-w2^2-w4^2)
Autonomous Capability
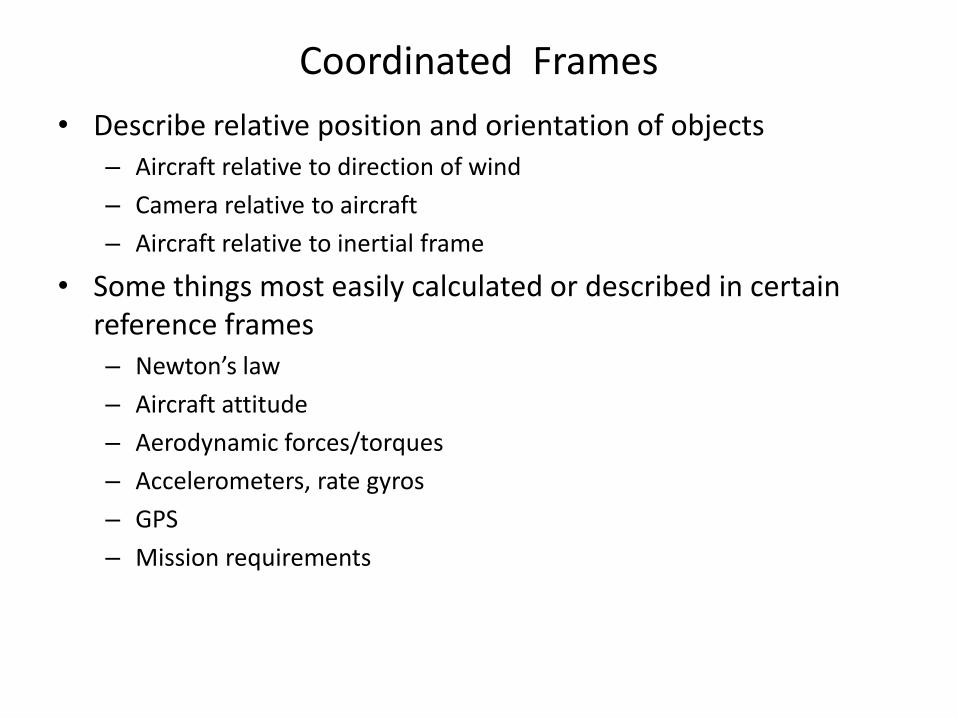
Coordinated Frames
• Describe relative position and orientation of objects – Aircraft relative to direction of wind
– Camera relative to aircraft
– Aircraft relative to inertial frame
• Some things most easily calculated or described in certain reference frames – Newton’s law
– Aircraft attitude
– Aerodynamic forces/torques
– Accelerometers, rate gyros
– GPS
– Mission requirements
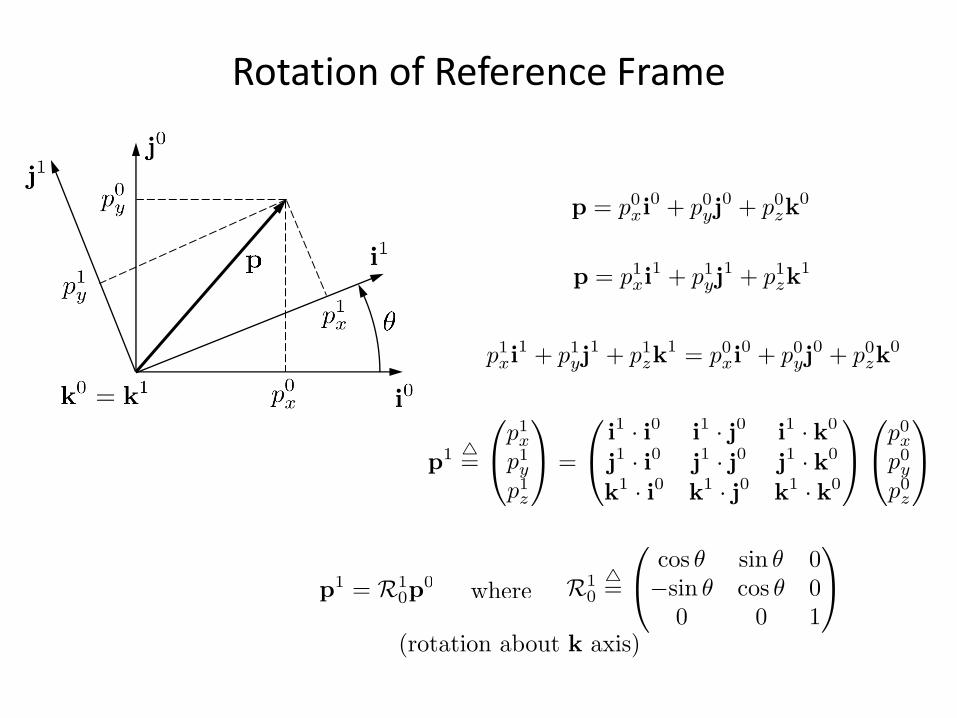
Rotation of Reference Frame
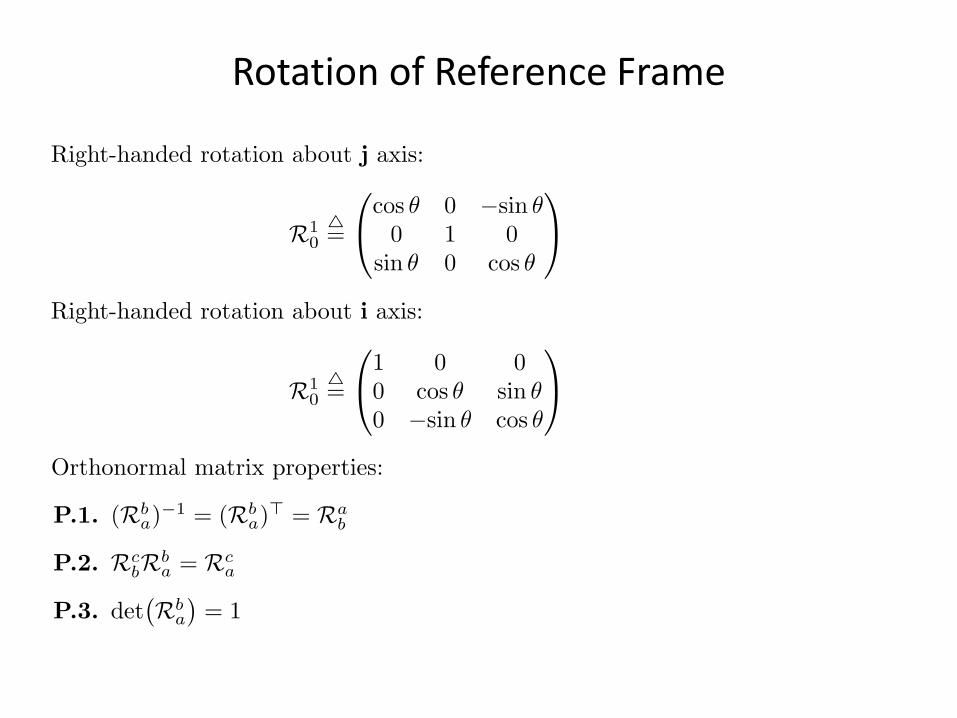
Rotation of Reference Frame
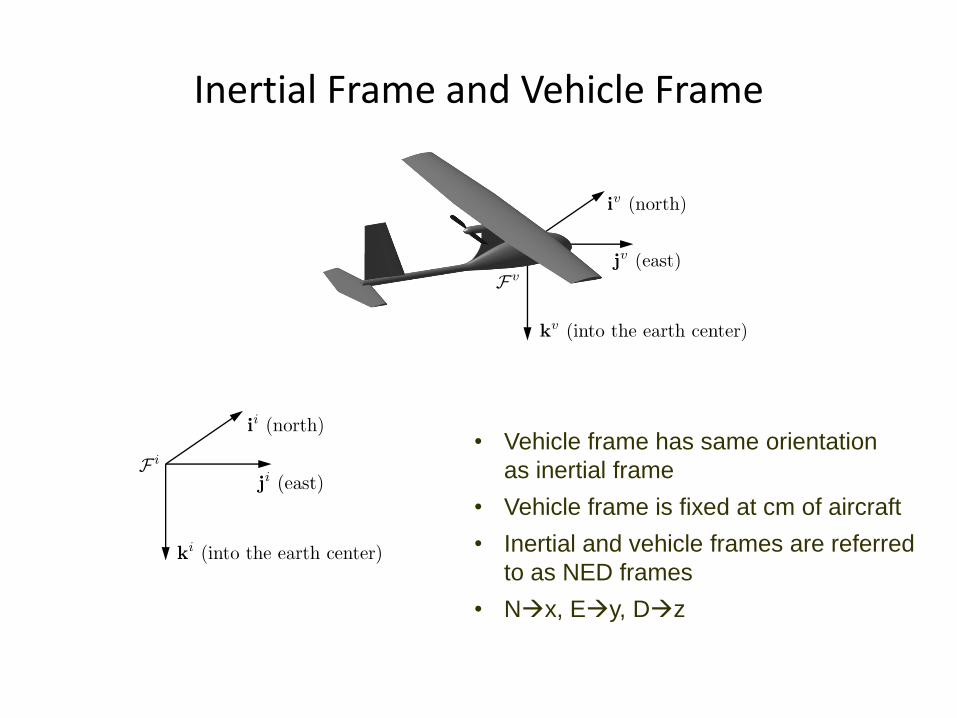
Inertial Frame and Vehicle Frame
• Vehicle frame has same orientation
as inertial frame
• Vehicle frame is fixed at cm of aircraft
• Inertial and vehicle frames are referred
to as NED frames
• Nx, Ey, Dz
Euler Angles
• Need way to describe attitude of aircraft
• Common approach: Euler angles
• Pro: Intuitive
• Con: Mathematical singularity
– Quaternions are alternative for overcoming singularity
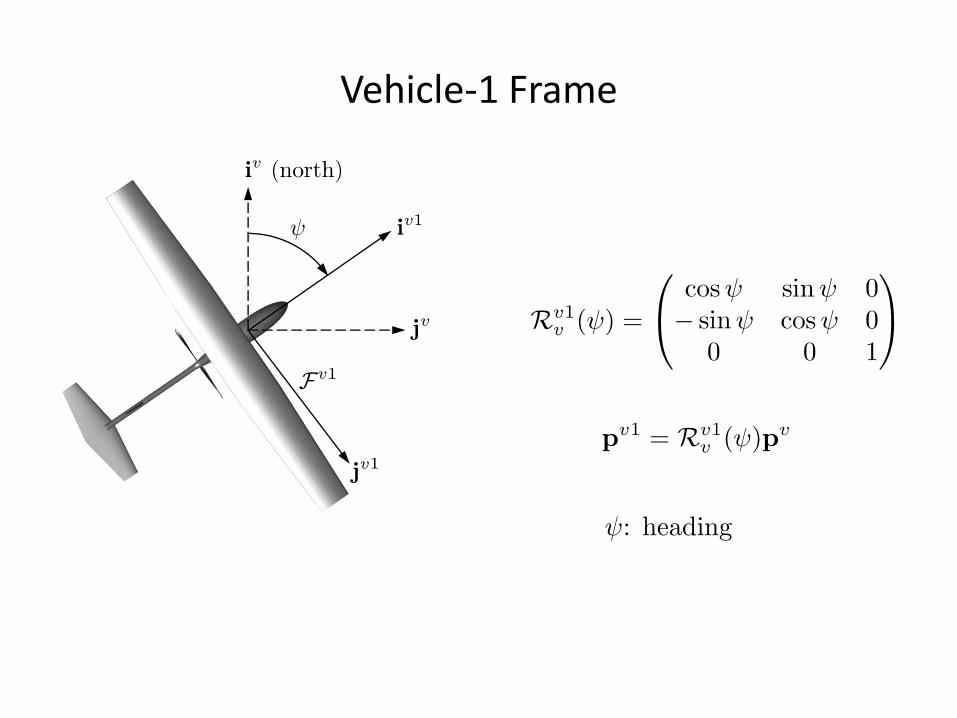
Vehicle-1 Frame
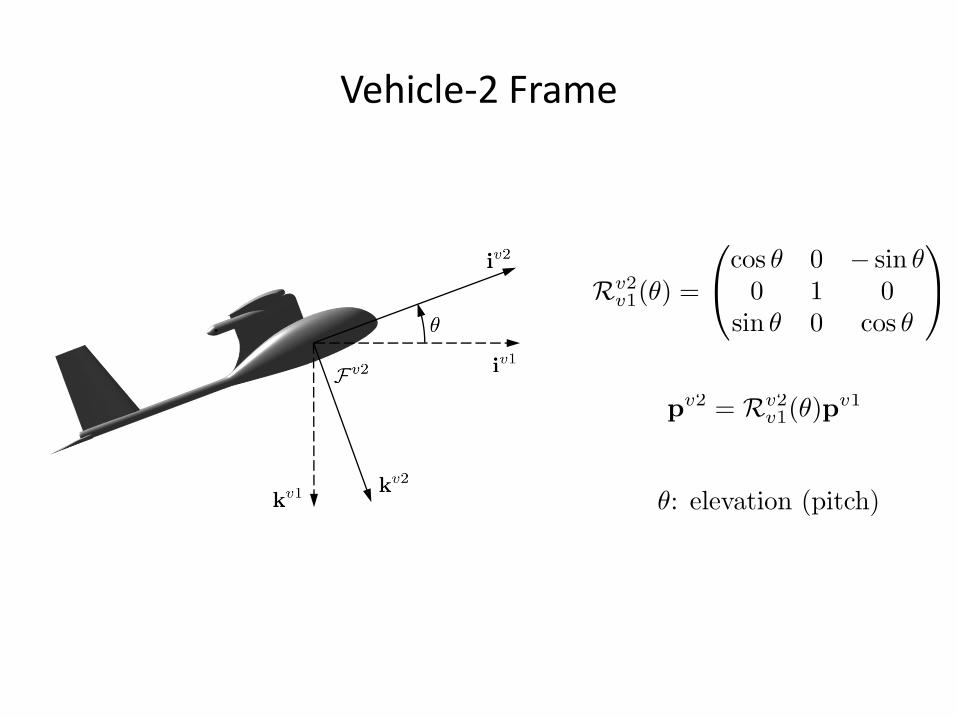
Vehicle-2 Frame
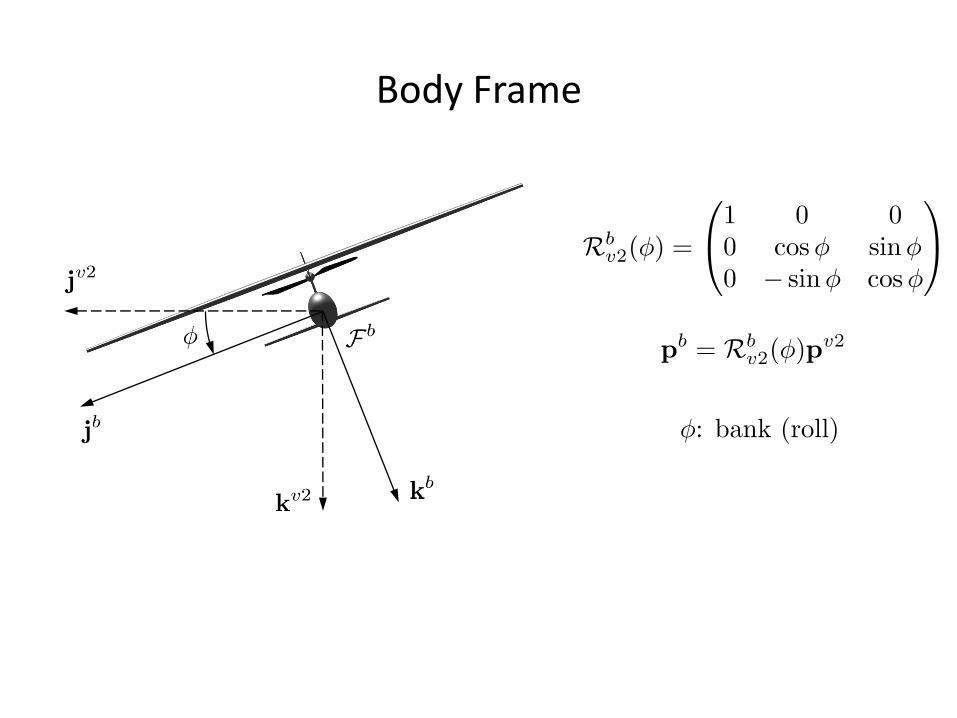
Body Frame
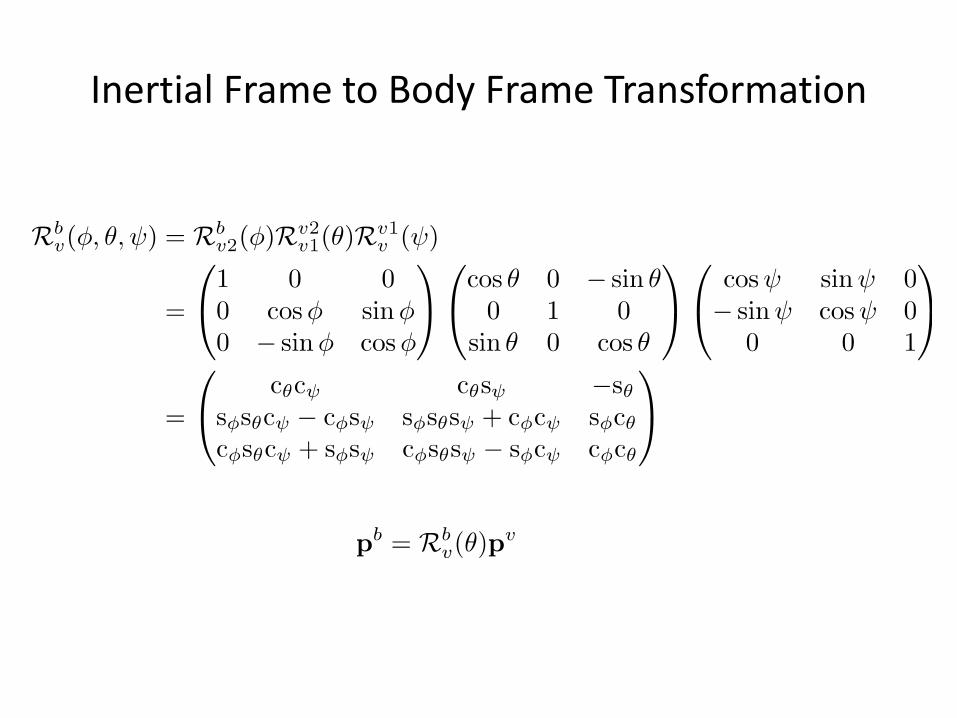
Inertial Frame to Body Frame Transformation
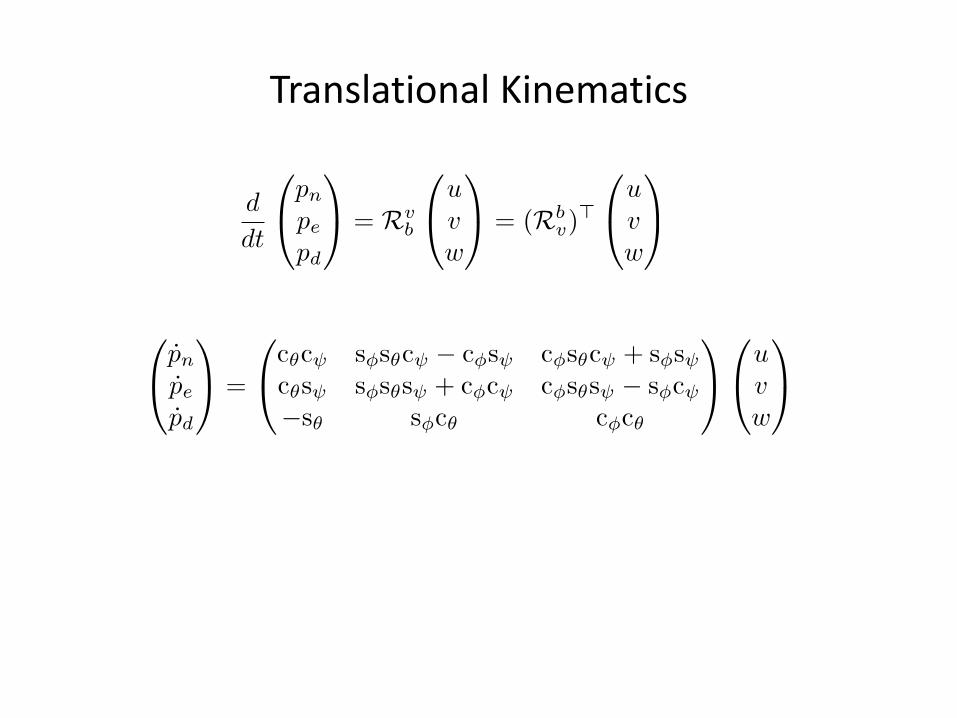
Translational Kinematics
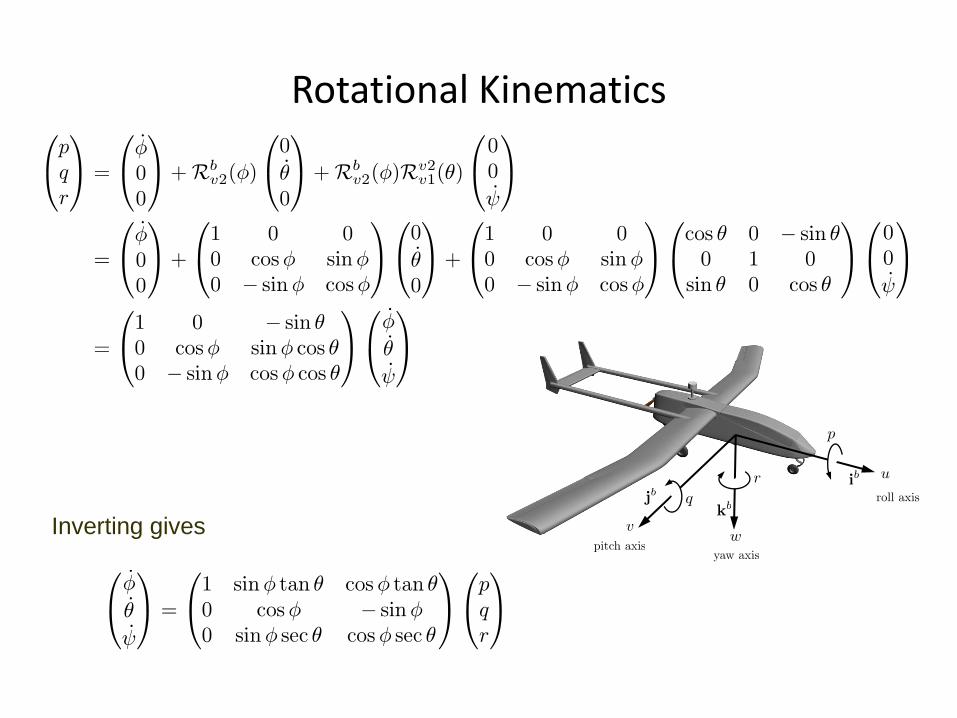
Rotational Kinematics
Inverting gives
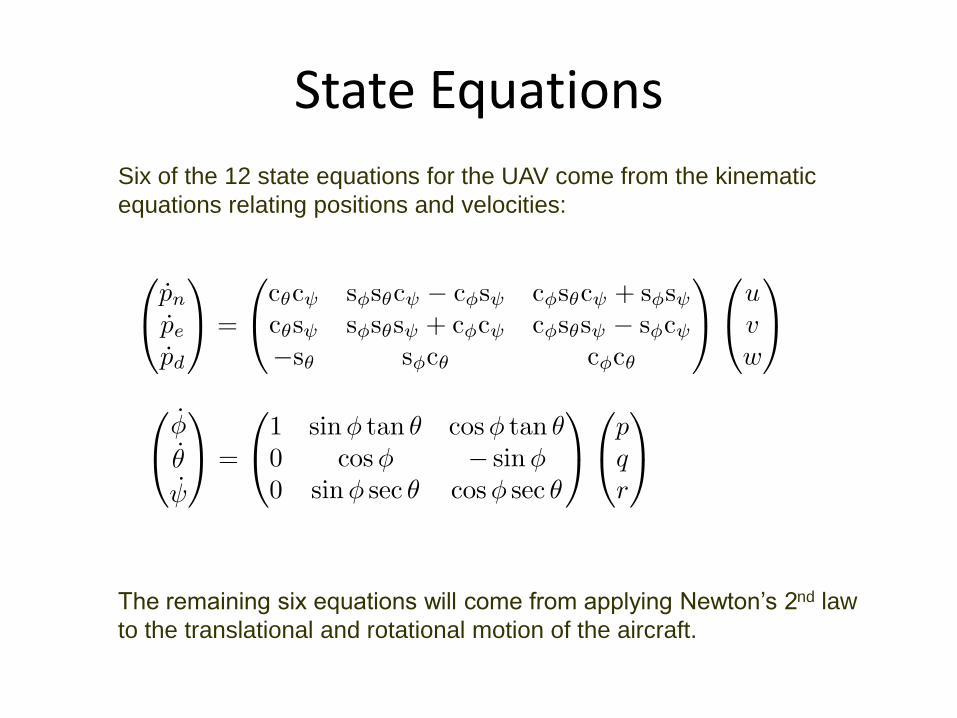
State Equations
Six of the 12 state equations for the UAV come from the kinematic
equations relating positions and velocities:
The remaining six equations will come from applying Newton’s 2nd law
to the translational and rotational motion of the aircraft.
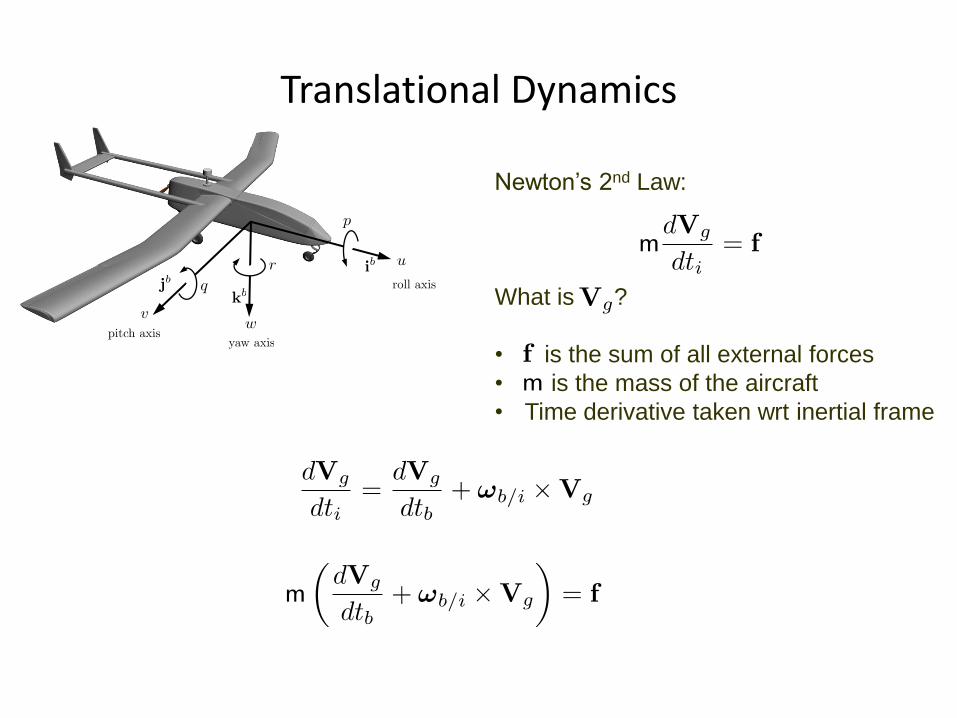
Translational Dynamics
Newton’s 2nd Law:
What is ?
• is the sum of all external forces
• is the mass of the aircraft
• Time derivative taken wrt inertial frame
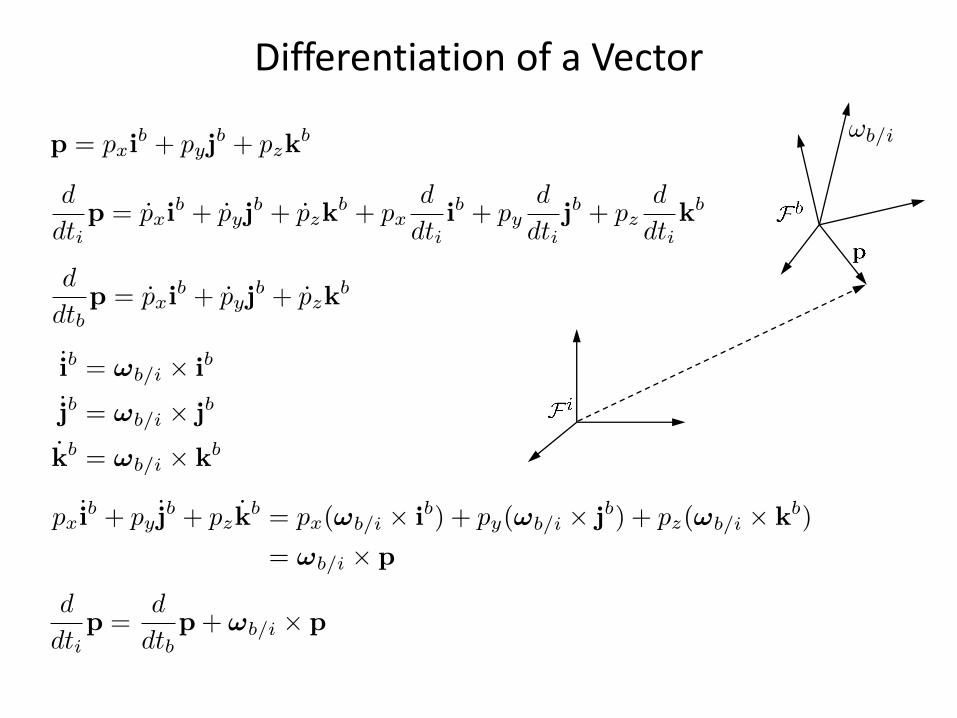
Differentiation of a Vector
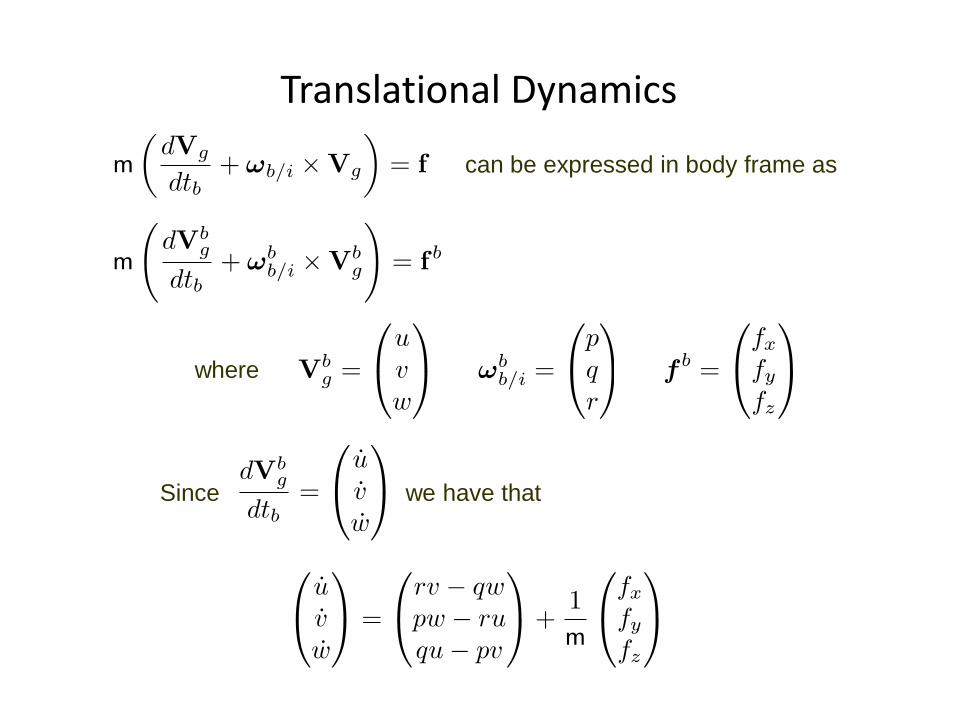
Translational Dynamics
can be expressed in body frame as
where
Since we have that
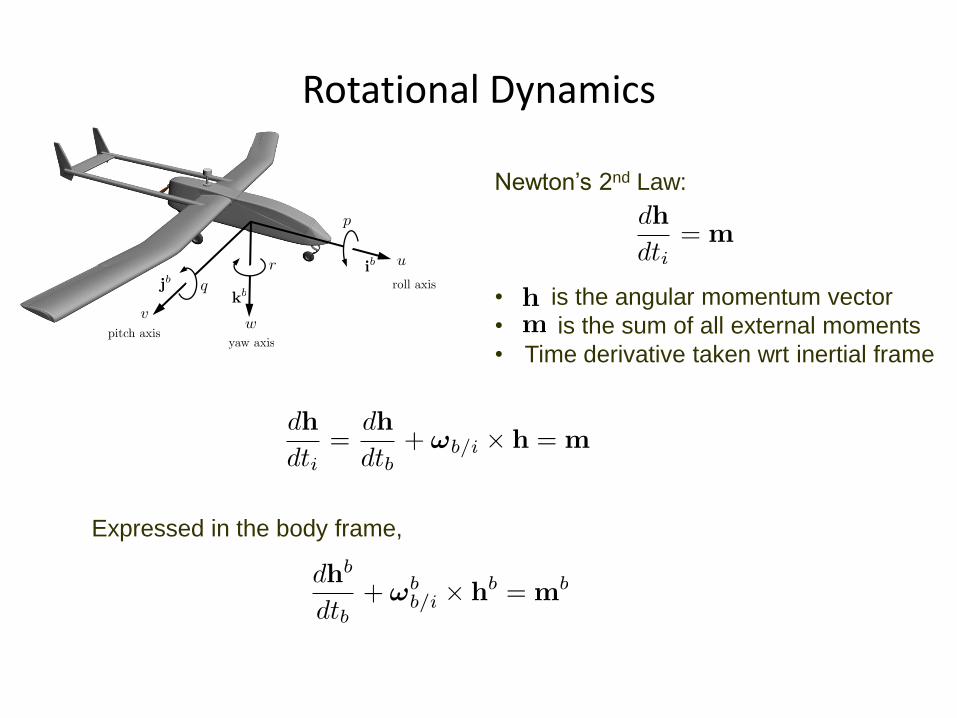
Rotational Dynamics
Newton’s 2nd Law:
• is the angular momentum vector
• is the sum of all external moments
• Time derivative taken wrt inertial frame
Expressed in the body frame,
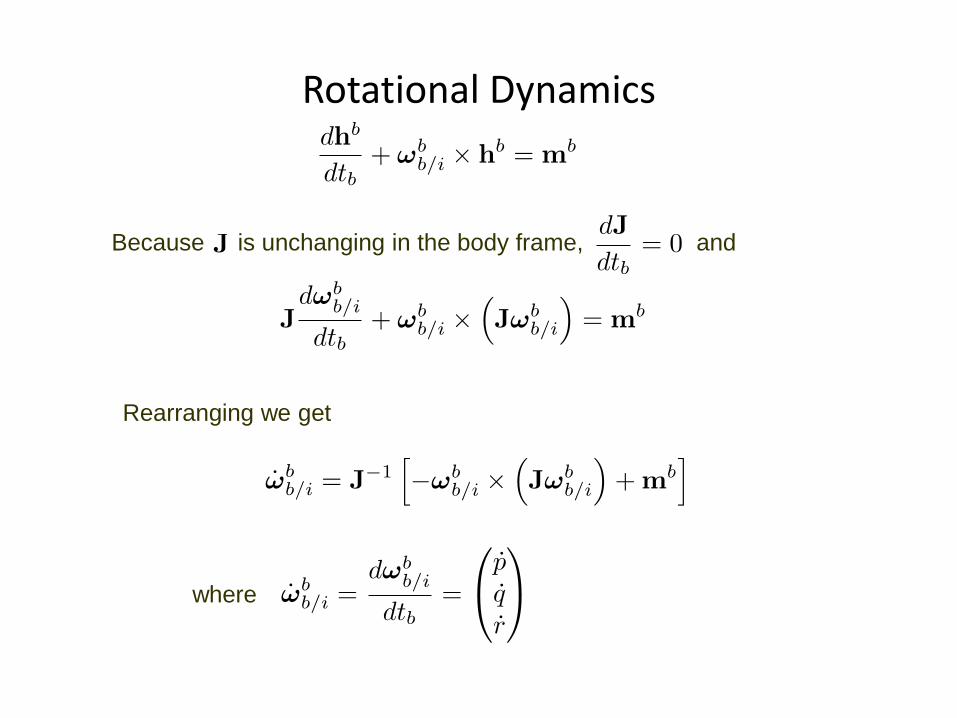
Rotational Dynamics
Because is unchanging in the body frame, and
Rearranging we get
where
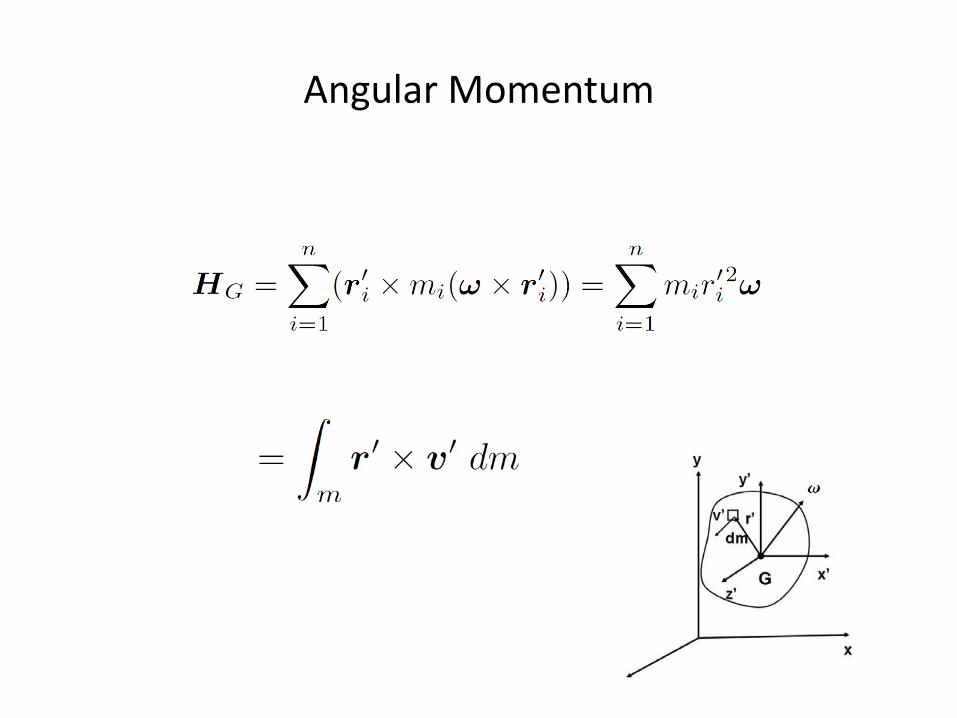
Angular Momentum
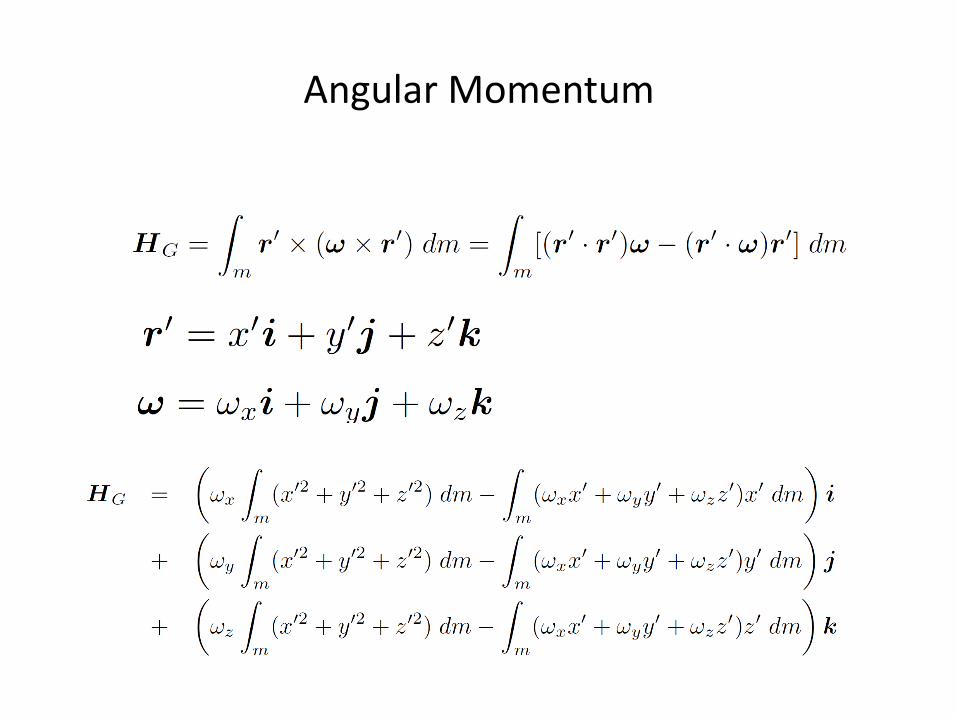
Angular Momentum
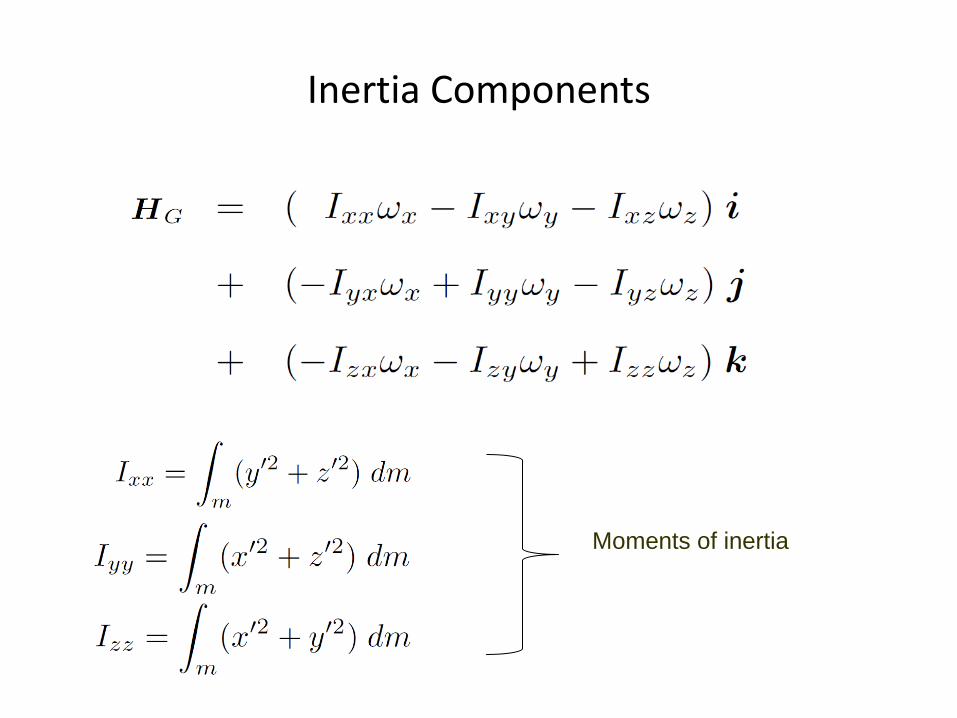
Inertia Components
Moments of inertia
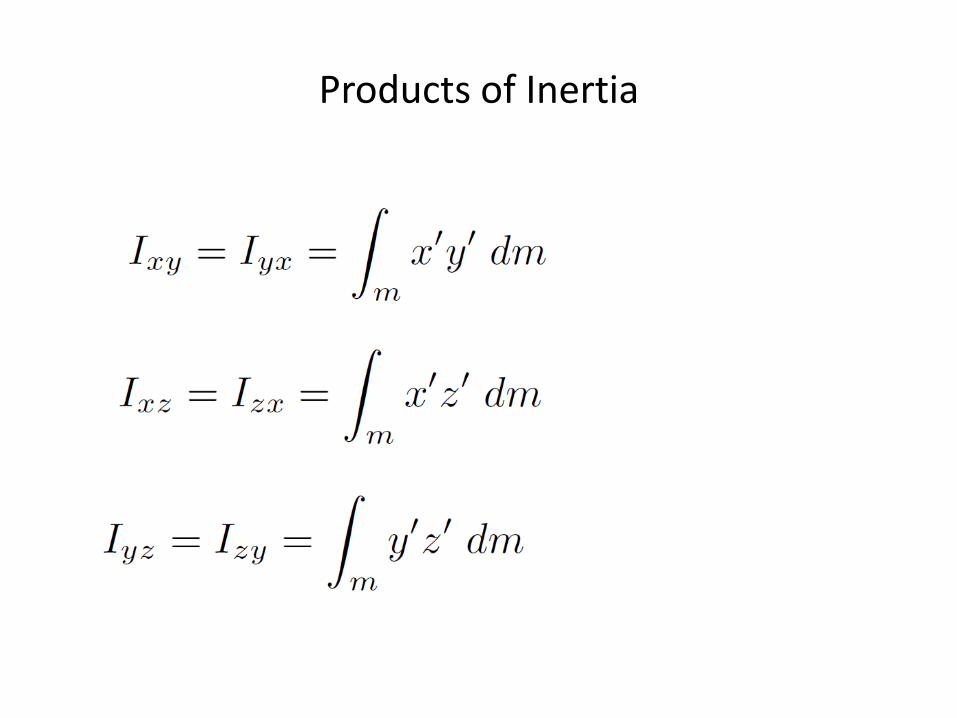
Products of Inertia
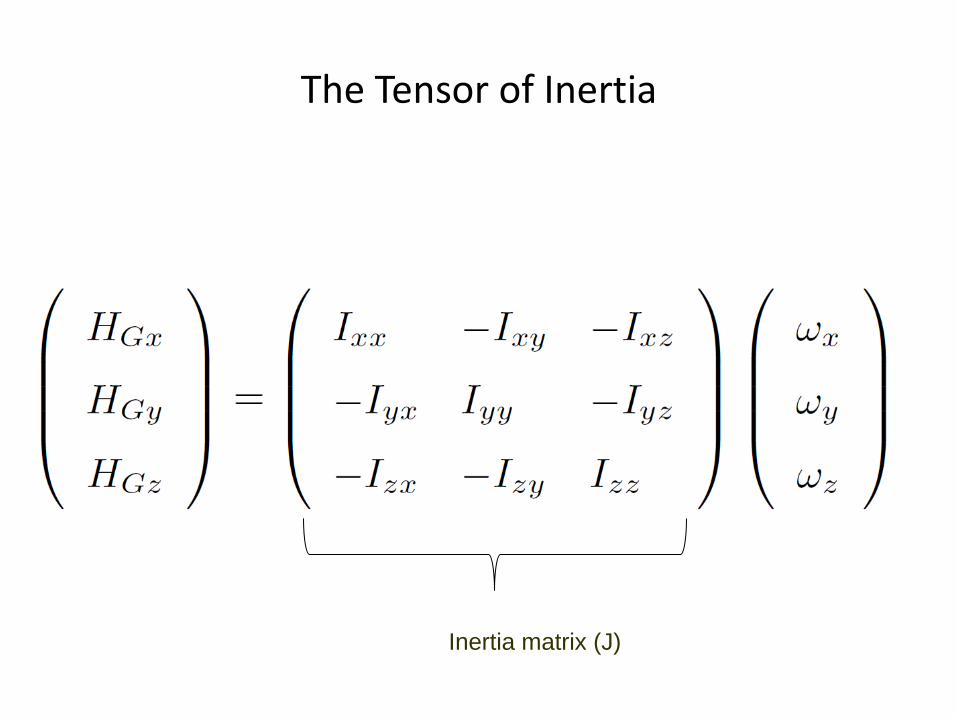
The Tensor of Inertia
Inertia matrix (J)
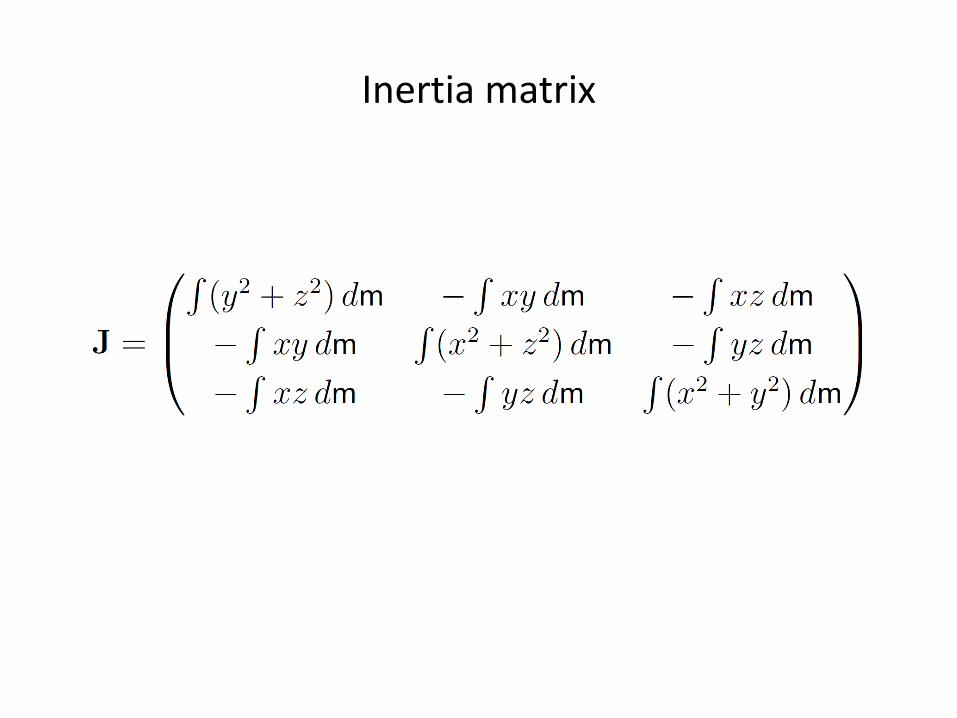
Inertia matrix
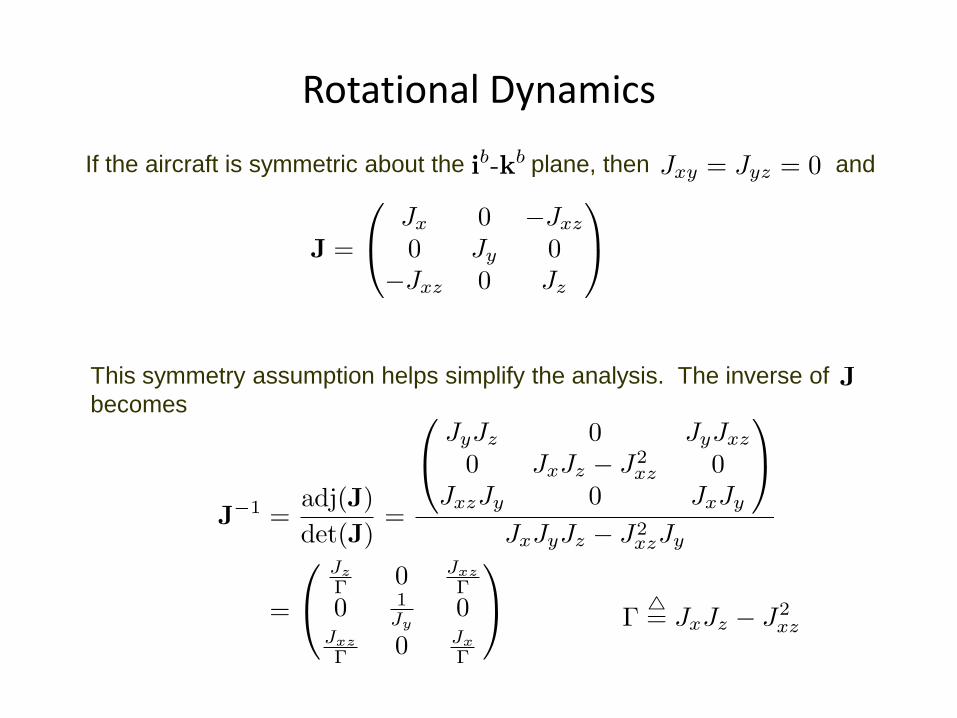
Rotational Dynamics
If the aircraft is symmetric about the plane, then and
This symmetry assumption helps simplify the analysis. The inverse of
becomes
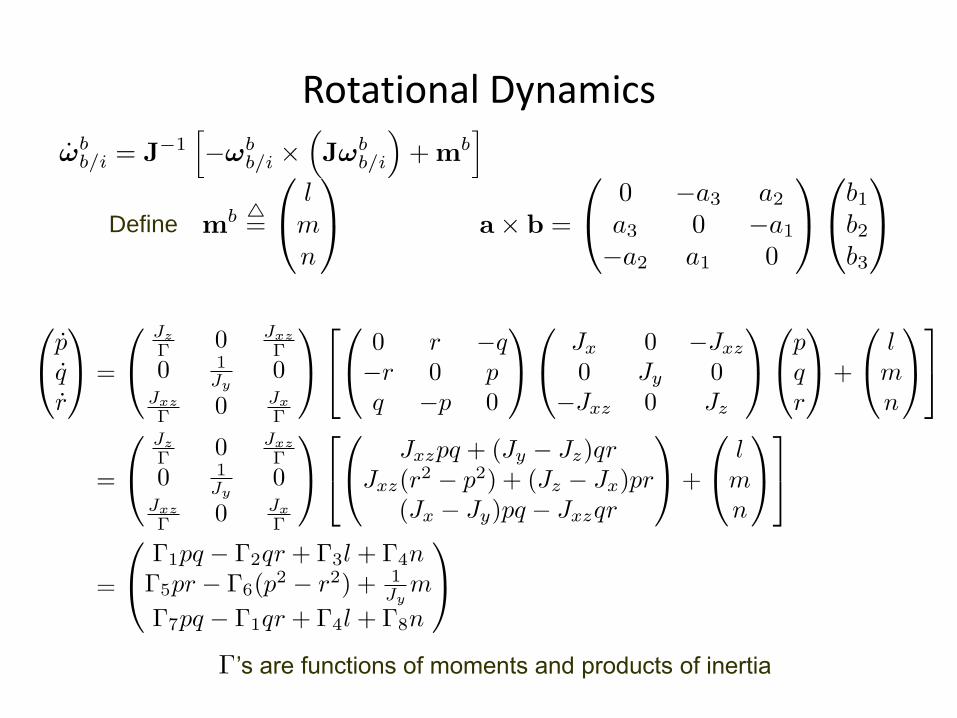
Rotational Dynamics
Define
’s are functions of moments and products of inertia
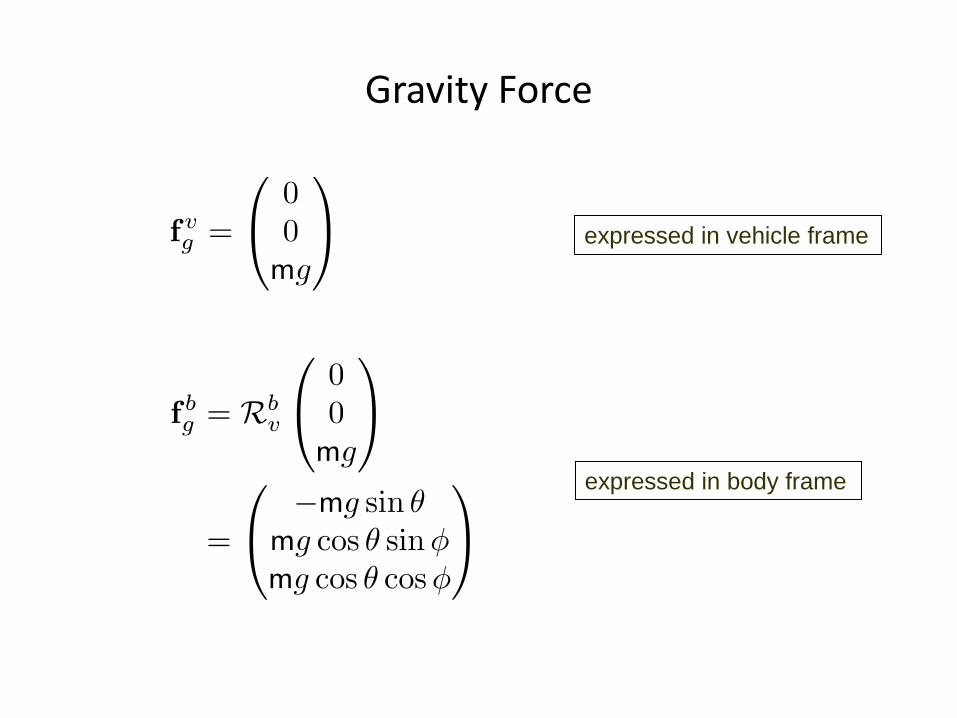
Gravity Force
expressed in vehicle frame
expressed in body frame
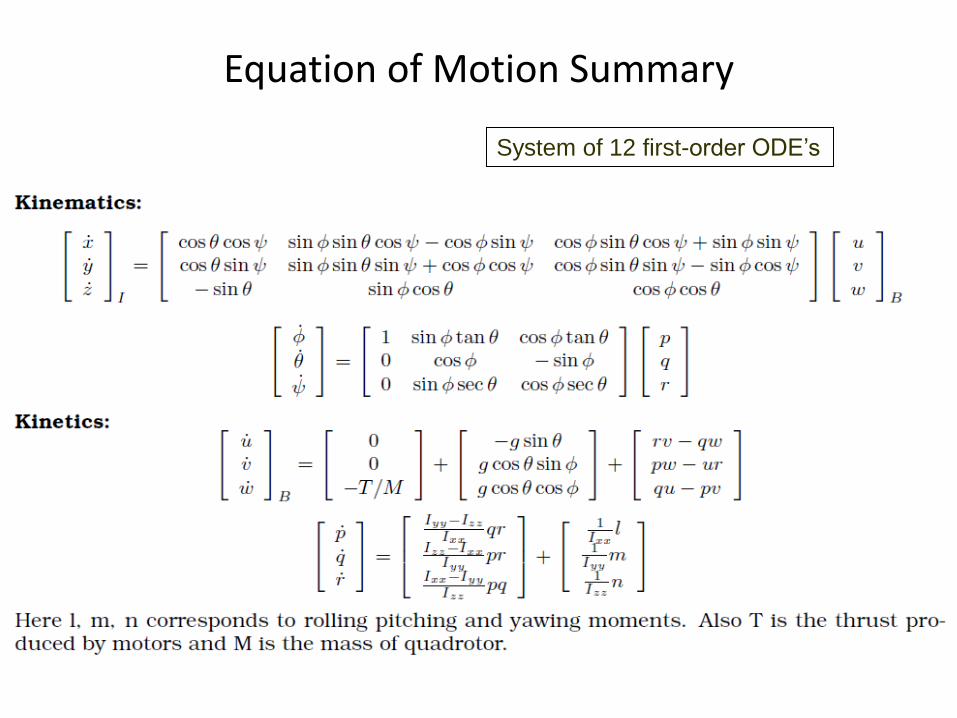
Equation of Motion Summary
System of 12 first-order ODE’s
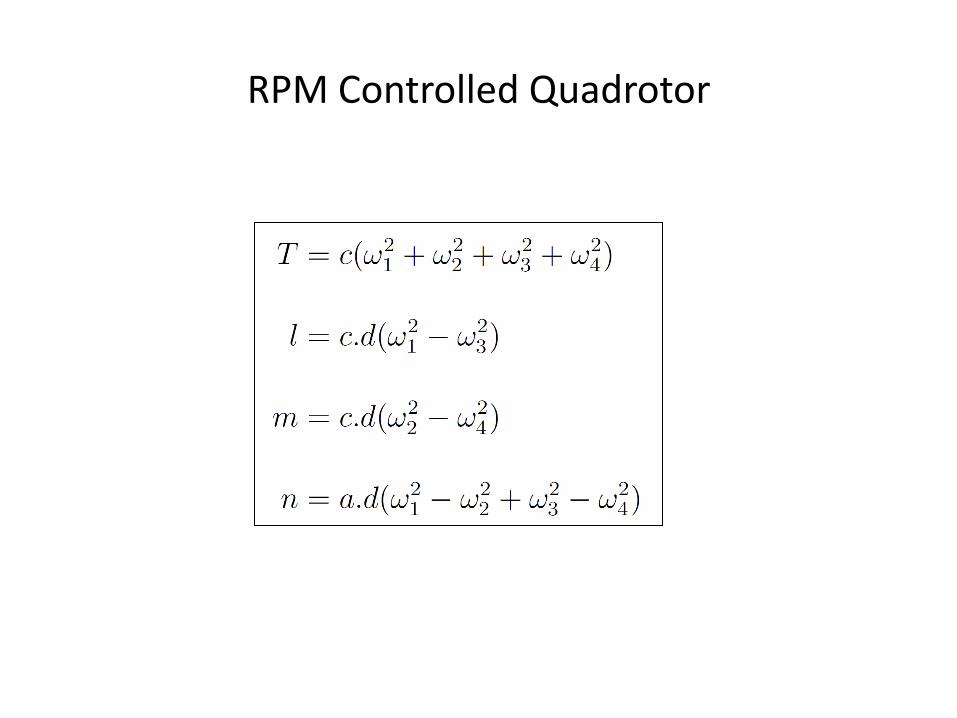
RPM Controlled Quadrotor
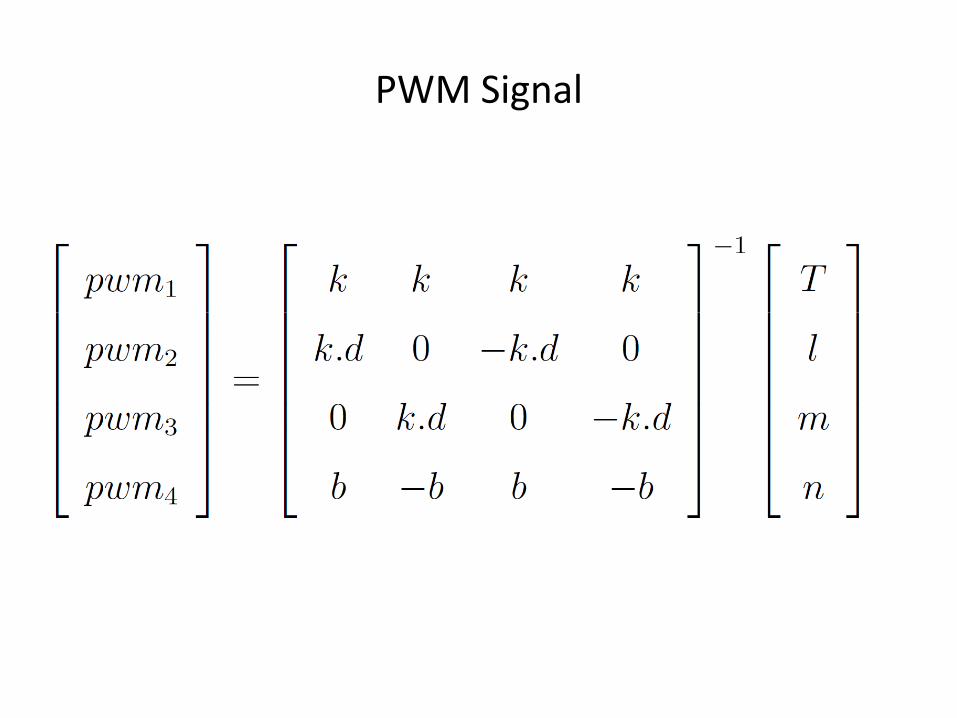
PWM Signal
Control Philosophy
• Force balance – Thrust support weight of a quadrotor
• Moment balance – Controlling attitude rate of control
• Quadrotor is controlled by using four motors
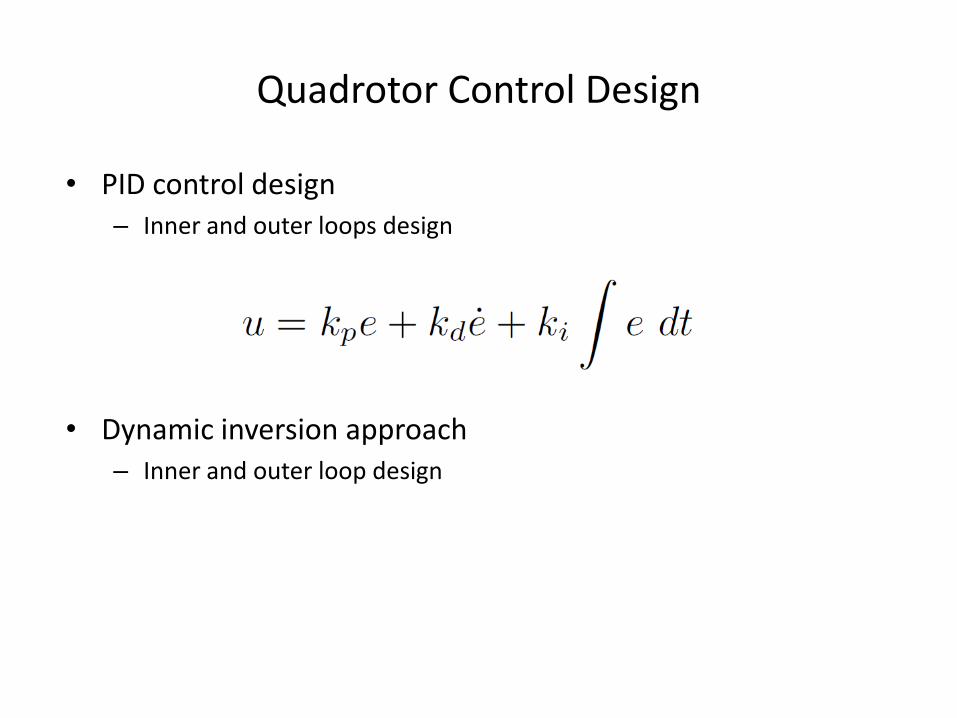
Quadrotor Control Design
• PID control design – Inner and outer loops design
• Dynamic inversion approach – Inner and outer loop design
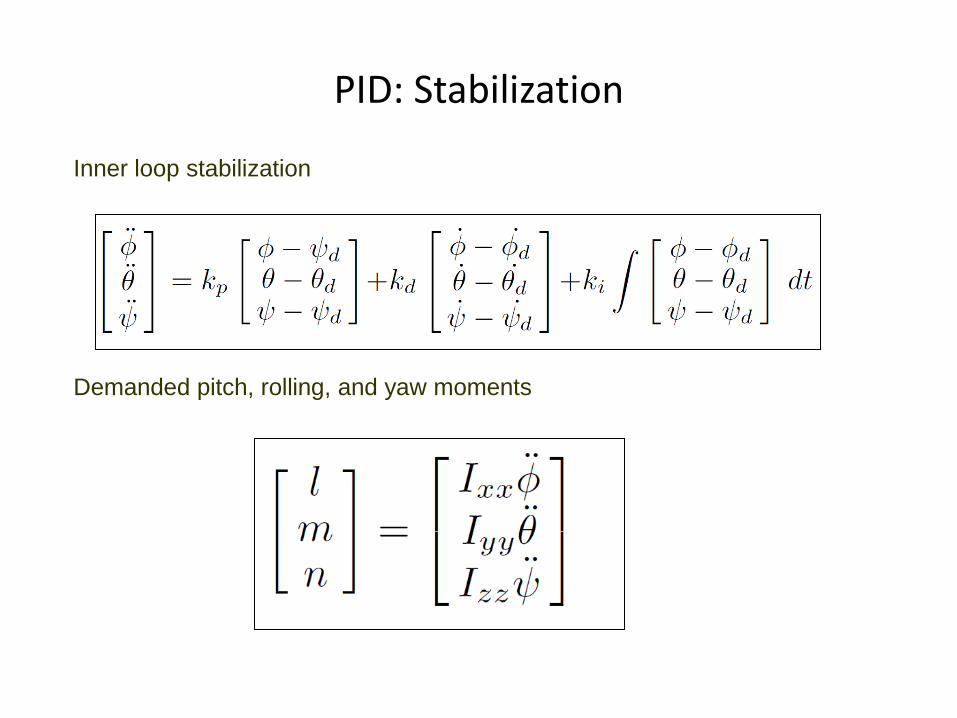
PID: Stabilization
Inner loop stabilization
Demanded pitch, rolling, and yaw moments
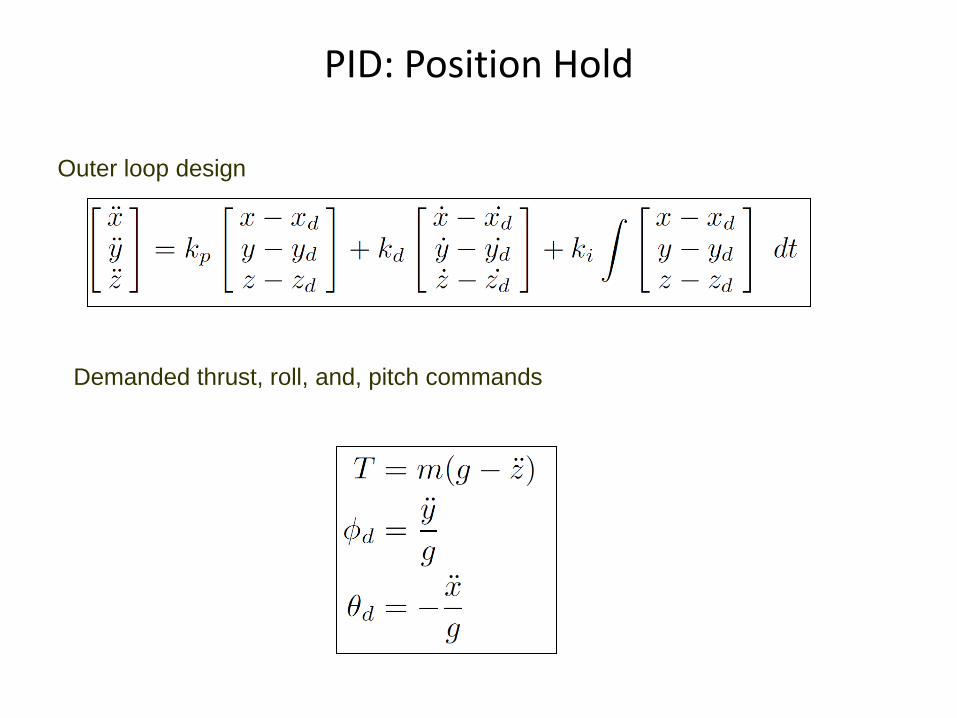
PID: Position Hold
Outer loop design
Demanded thrust, roll, and, pitch commands
Dynamic Inversion Approach
• Nonlinear control design: works for the whole flight regime
• Cancel the all nonlinearities in the system through the feedback law
• Requires the complete knowledge of the plant
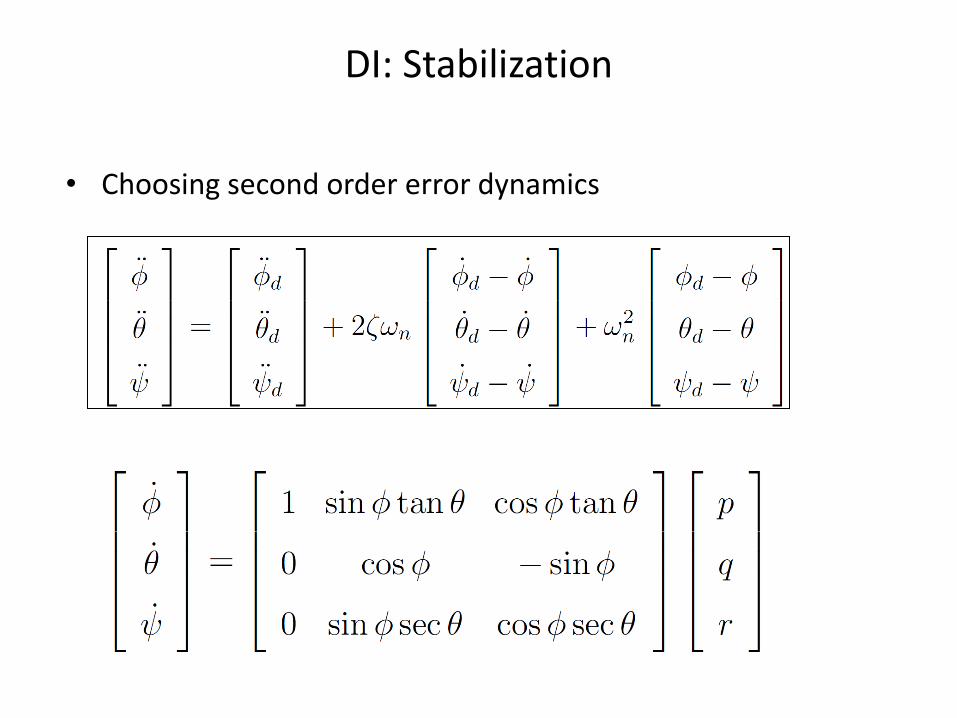
DI: Stabilization
• Choosing second order error dynamics
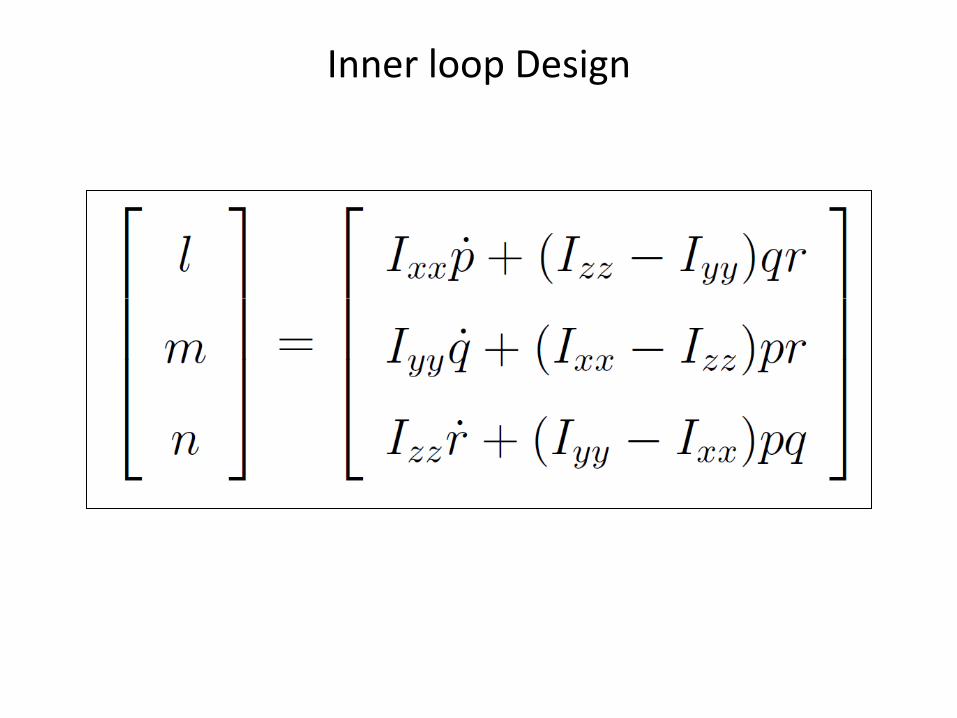
Inner loop Design
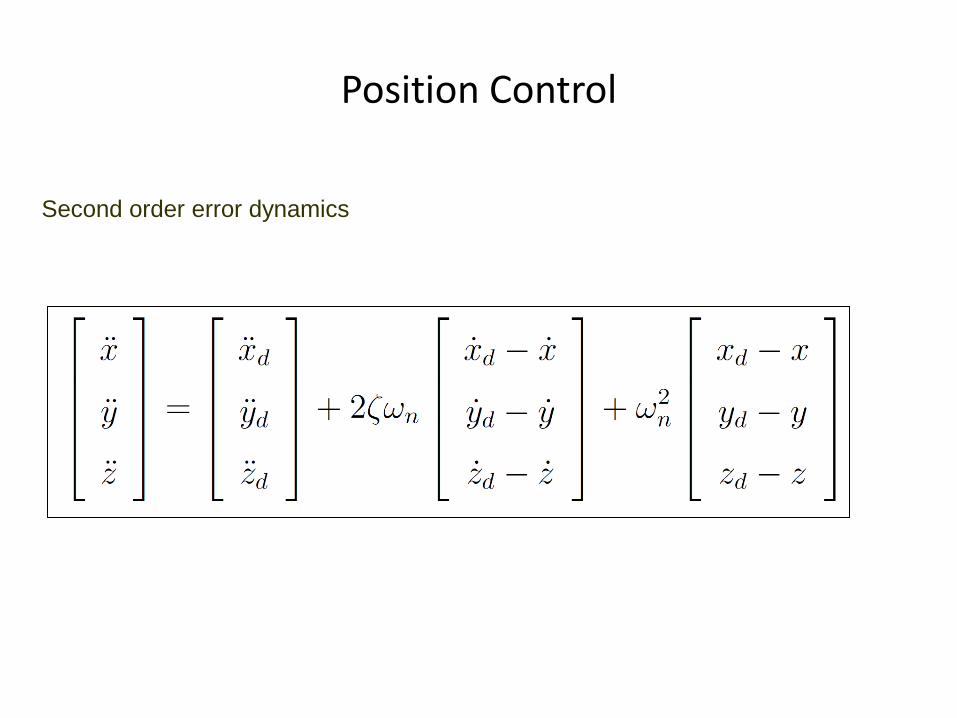
Position Control
Second order error dynamics
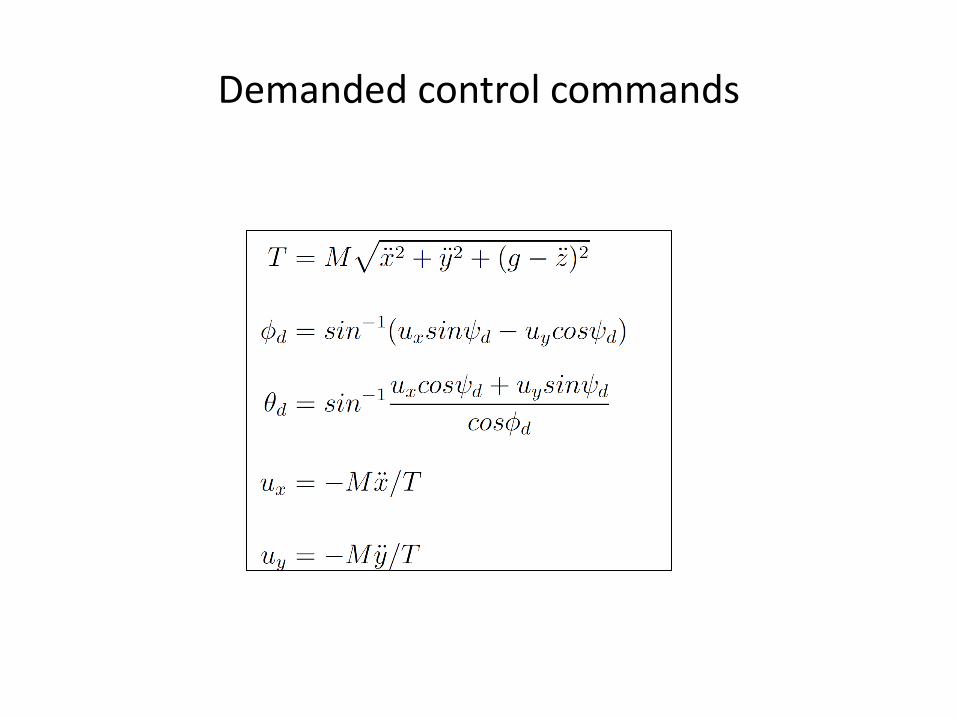
Demanded control commands
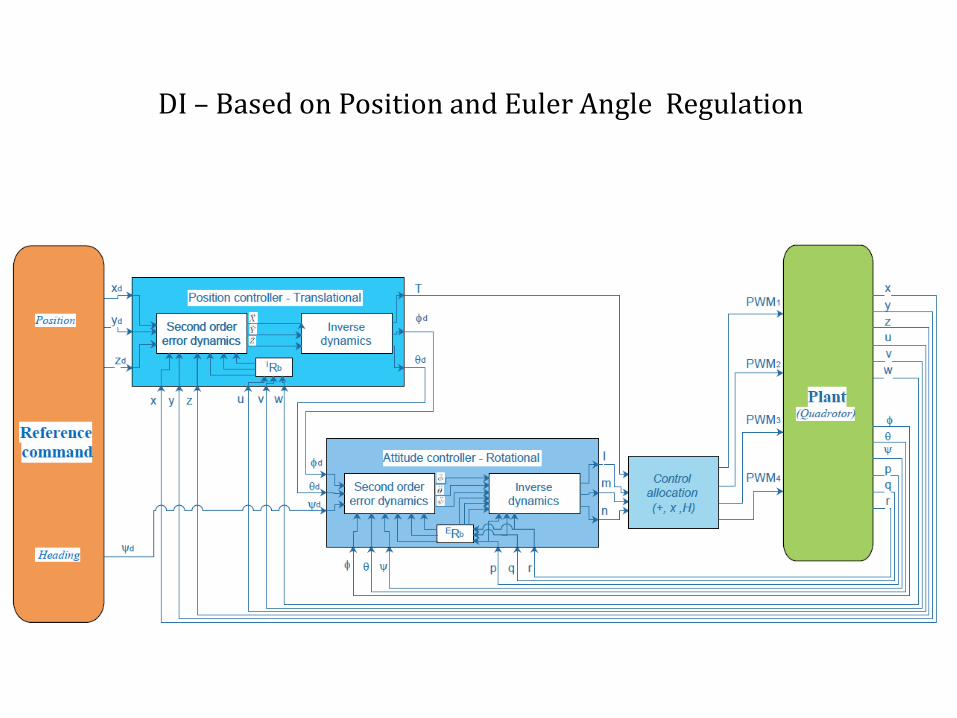
DI – Based on Position and Euler Angle Regulation
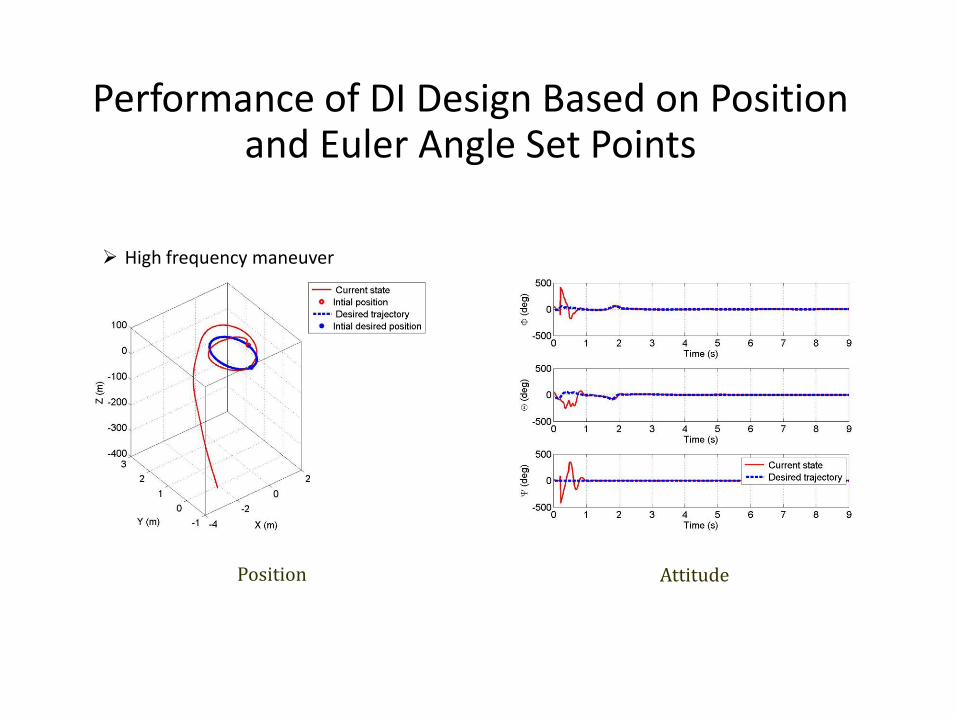
Performance of DI Design Based on Position and Euler Angle Set Points
Position Attitude
High frequency maneuver
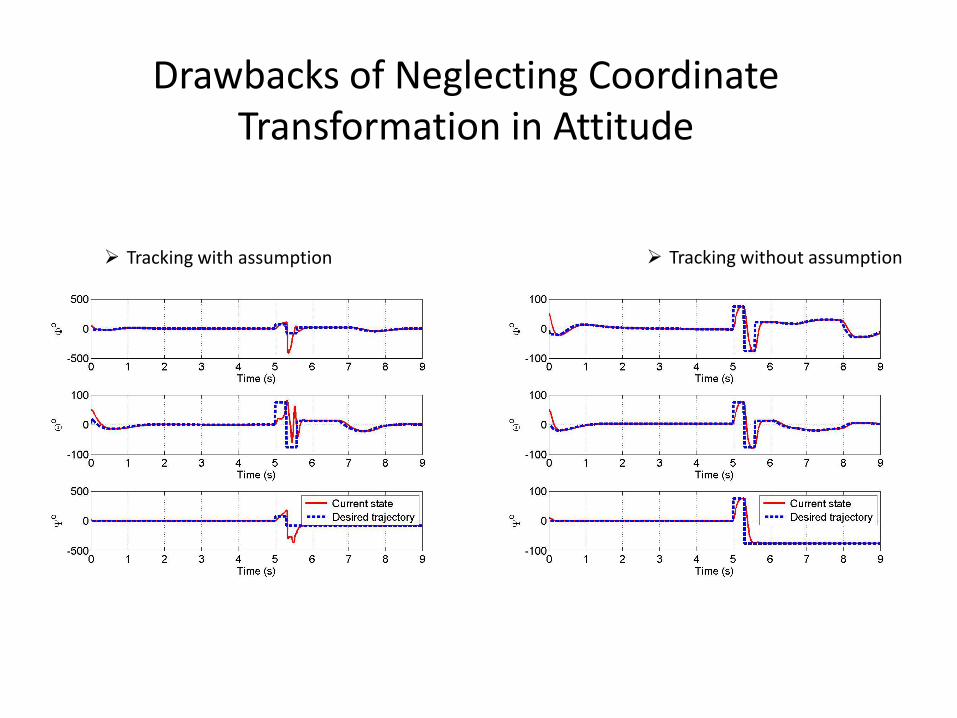
Drawbacks of Neglecting Coordinate Transformation in Attitude
Tracking with assumption Tracking without assumption
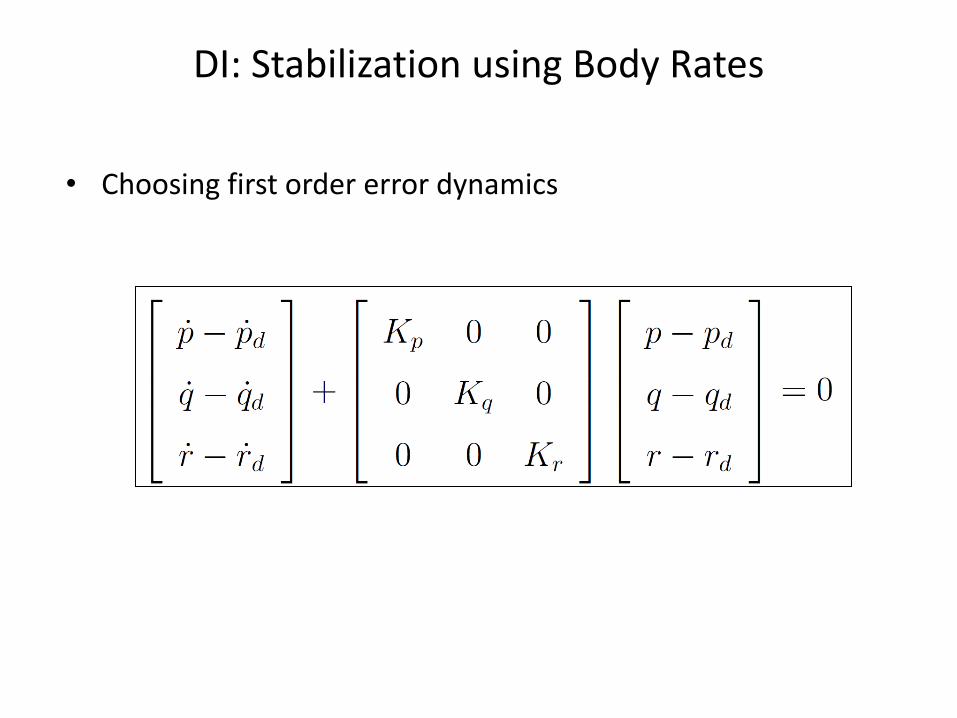
DI: Stabilization using Body Rates
• Choosing first order error dynamics
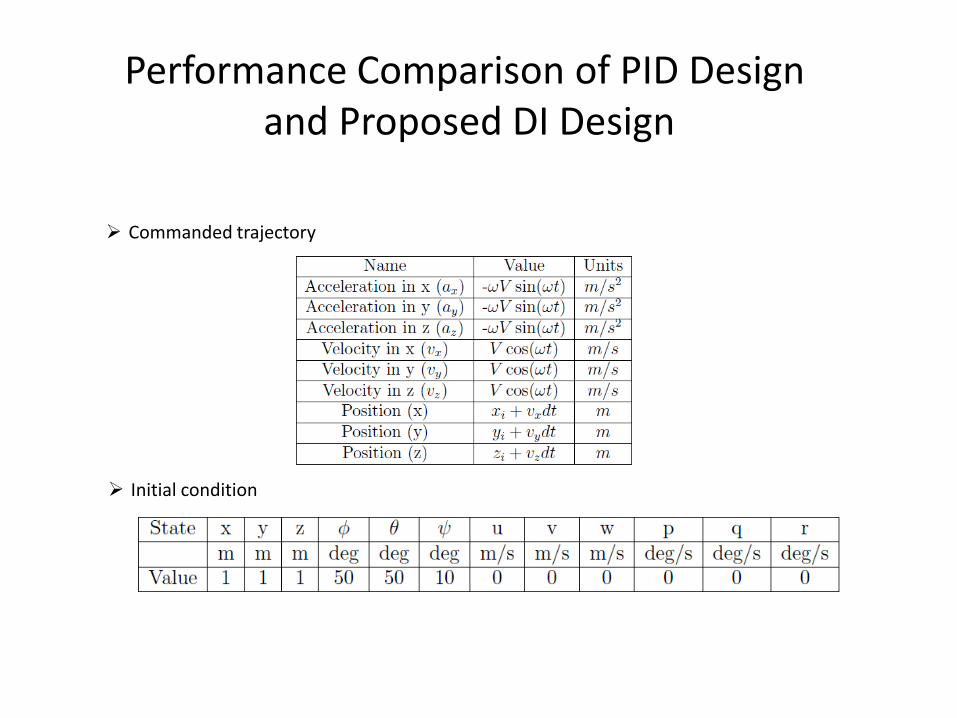
Performance Comparison of PID Design and Proposed DI Design
Commanded trajectory
Initial condition
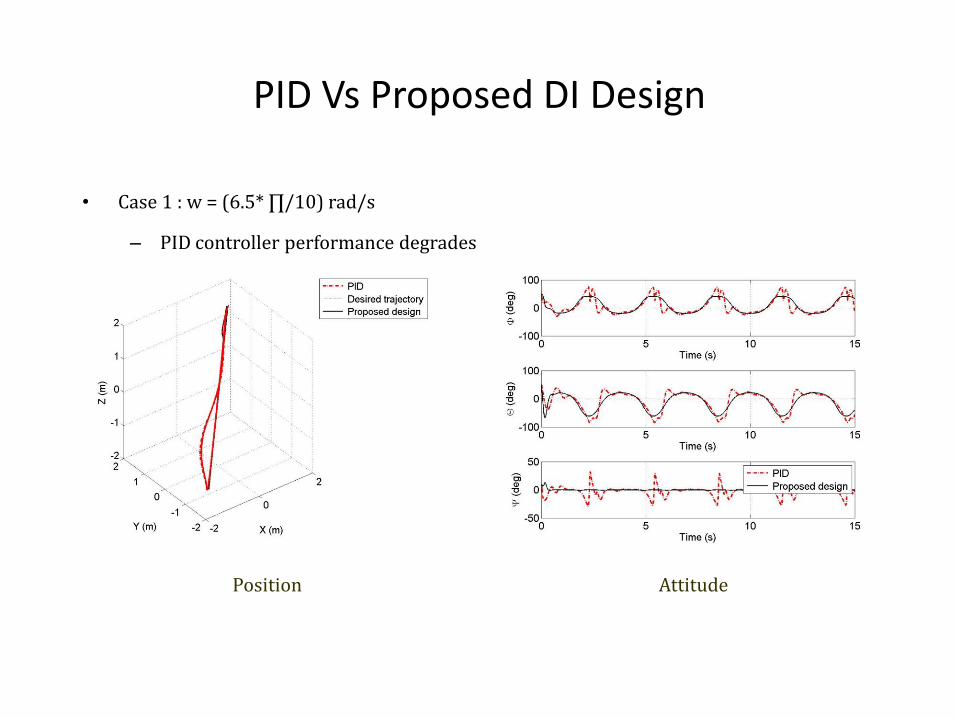
PID Vs Proposed DI Design
• Case 1 : w = (6.5* ∏/10) rad/s
– PID controller performance degrades
Position Attitude
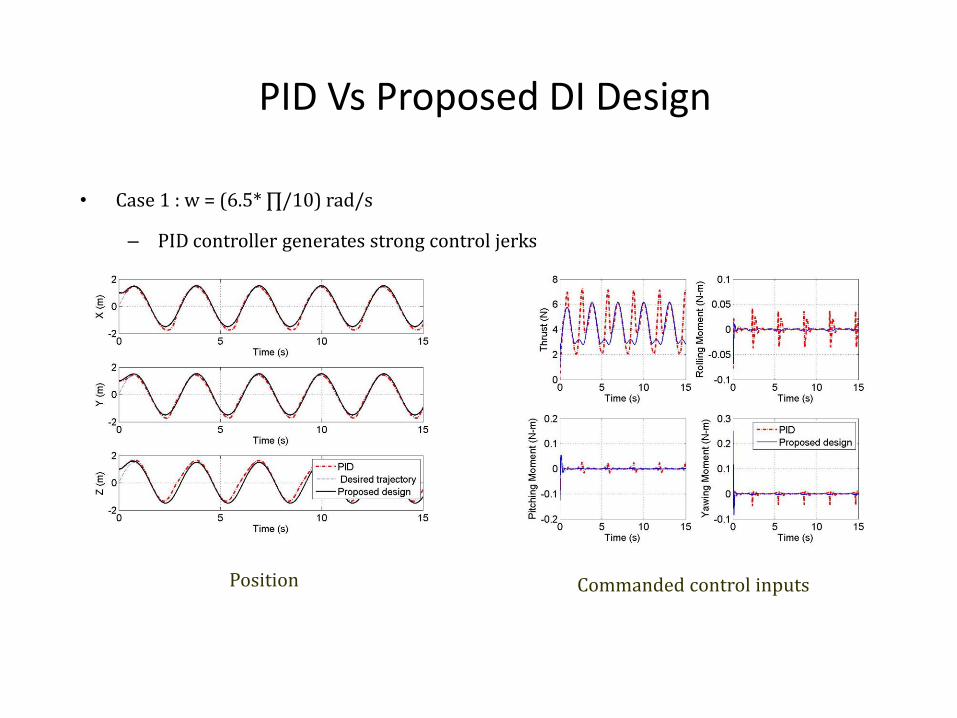
PID Vs Proposed DI Design
• Case 1 : w = (6.5* ∏/10) rad/s
– PID controller generates strong control jerks
Position Commanded control inputs
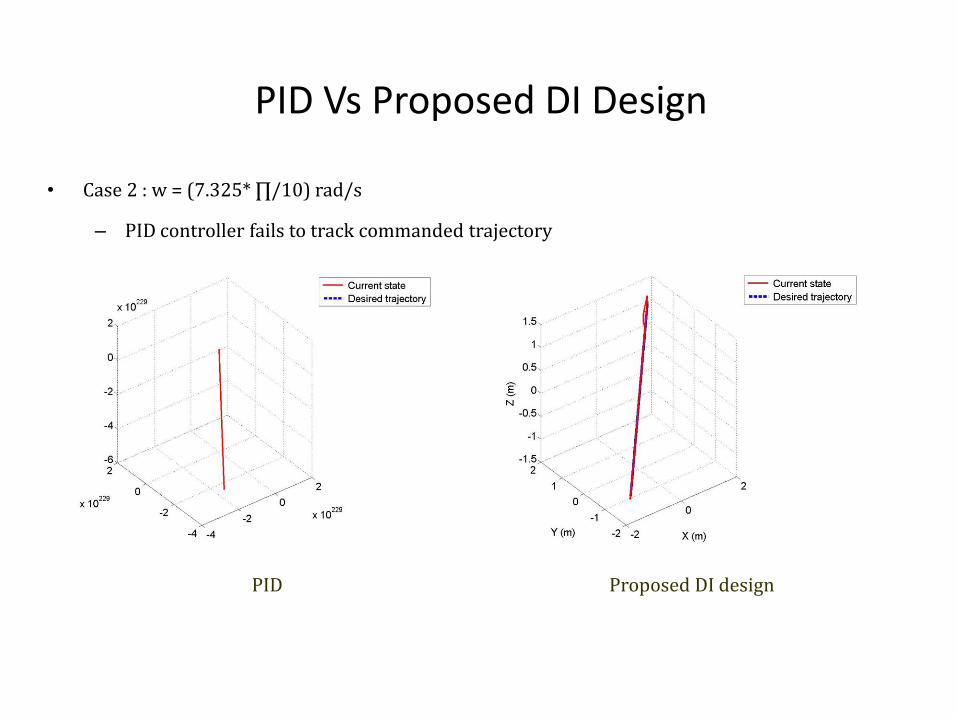
PID Vs Proposed DI Design
• Case 2 : w = (7.325* ∏/10) rad/s
– PID controller fails to track commanded trajectory
PID Proposed DI design
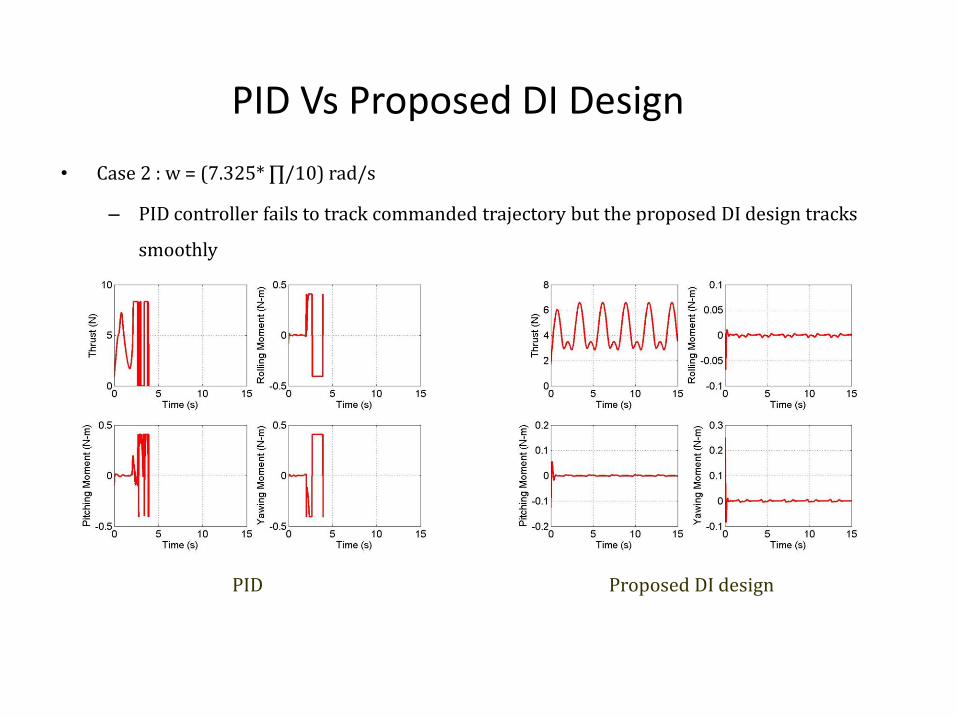
PID Vs Proposed DI Design
• Case 2 : w = (7.325* ∏/10) rad/s
– PID controller fails to track commanded trajectory but the proposed DI design tracks
smoothly
PID Proposed DI design
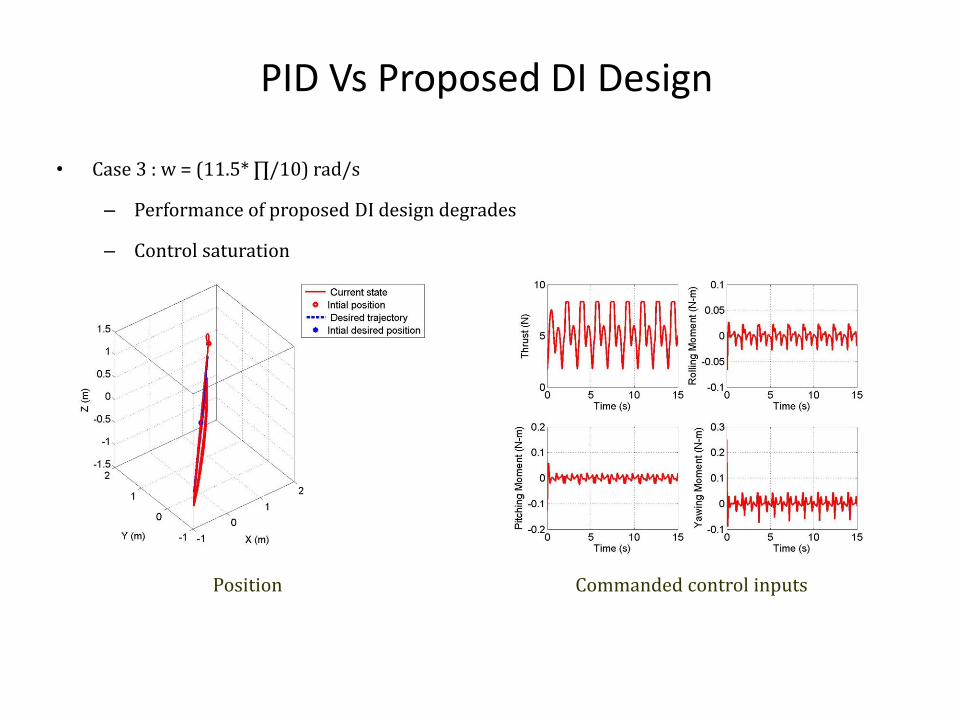
PID Vs Proposed DI Design
• Case 3 : w = (11.5* ∏/10) rad/s
– Performance of proposed DI design degrades
– Control saturation
Position Commanded control inputs

Cooperative Target Capturing
55
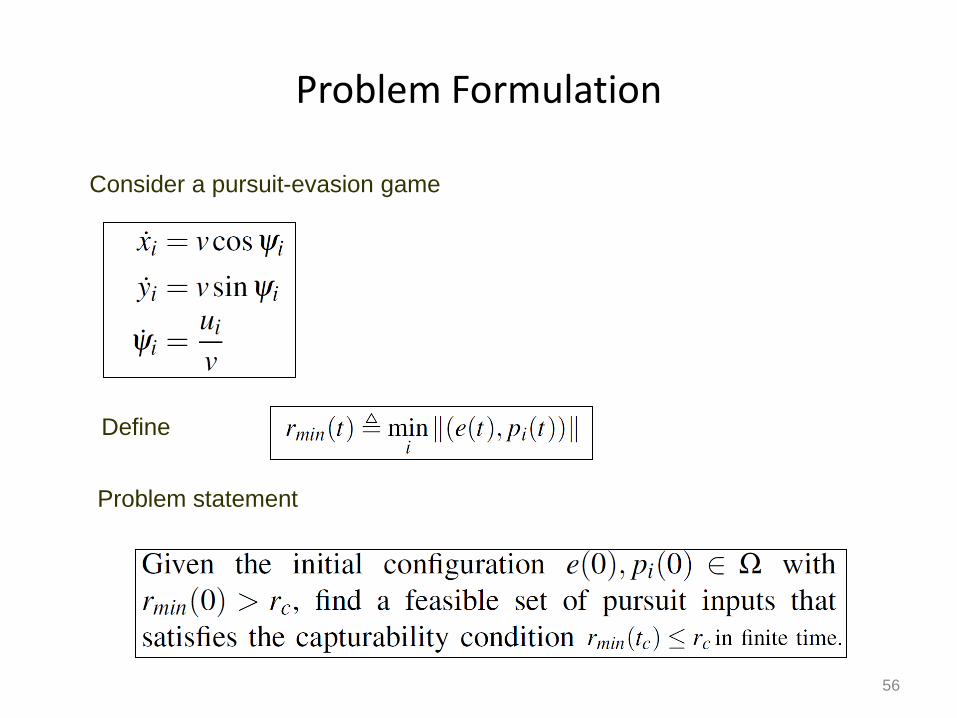
Problem Formulation
Consider a pursuit-evasion game
Define
Problem statement
56
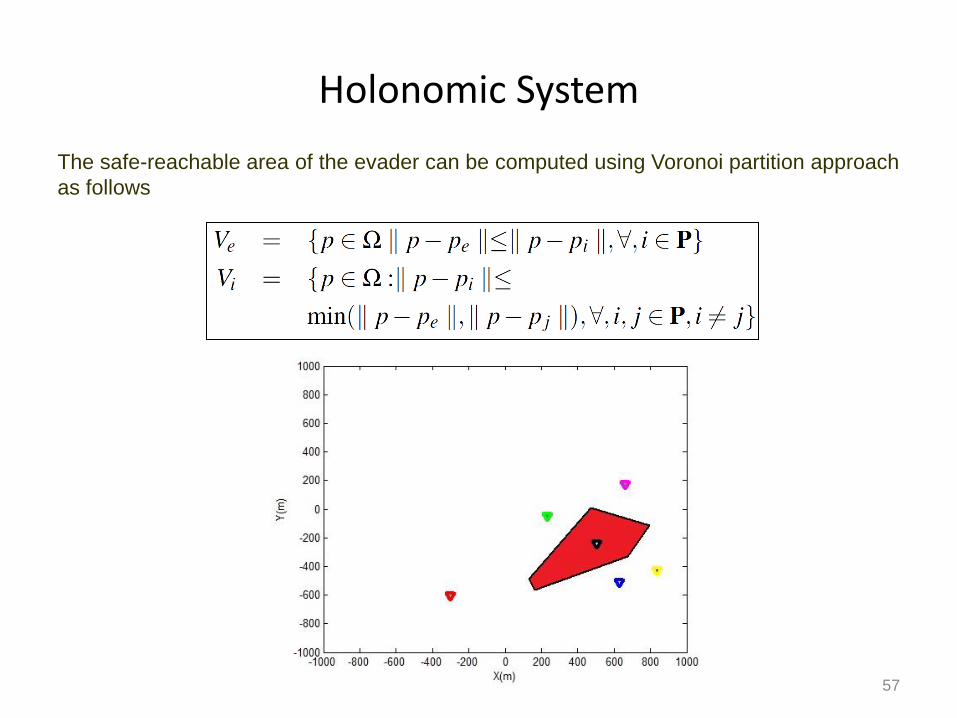
Holonomic System
The safe-reachable area of the evader can be computed using Voronoi partition approach
as follows
57
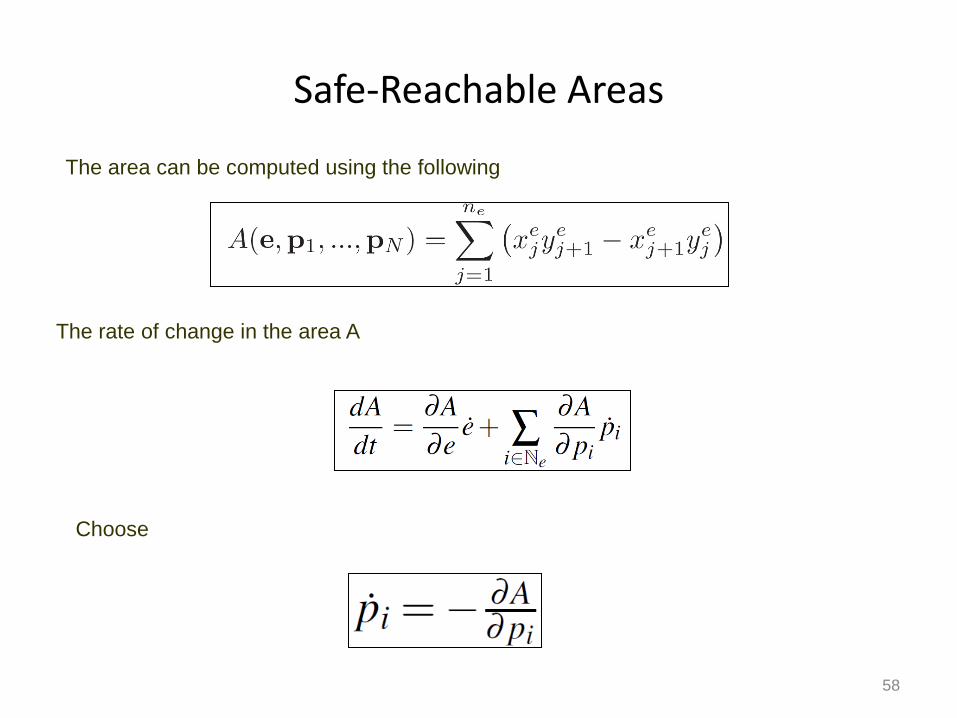
Safe-Reachable Areas
The rate of change in the area A
Choose
The area can be computed using the following
58
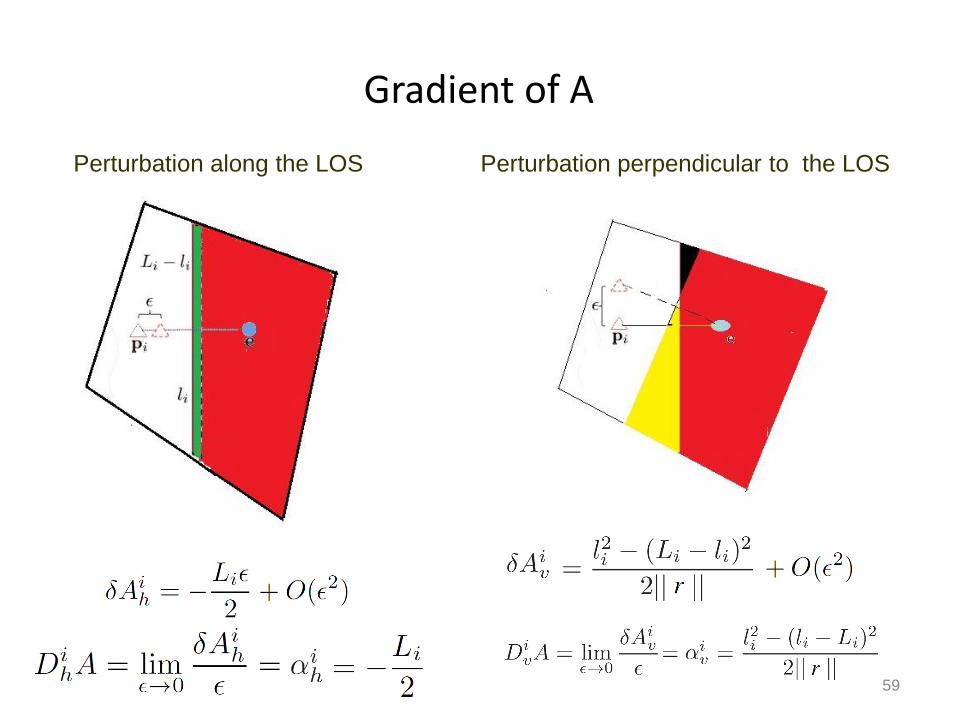
Gradient of A
Perturbation along the LOS Perturbation perpendicular to the LOS
59
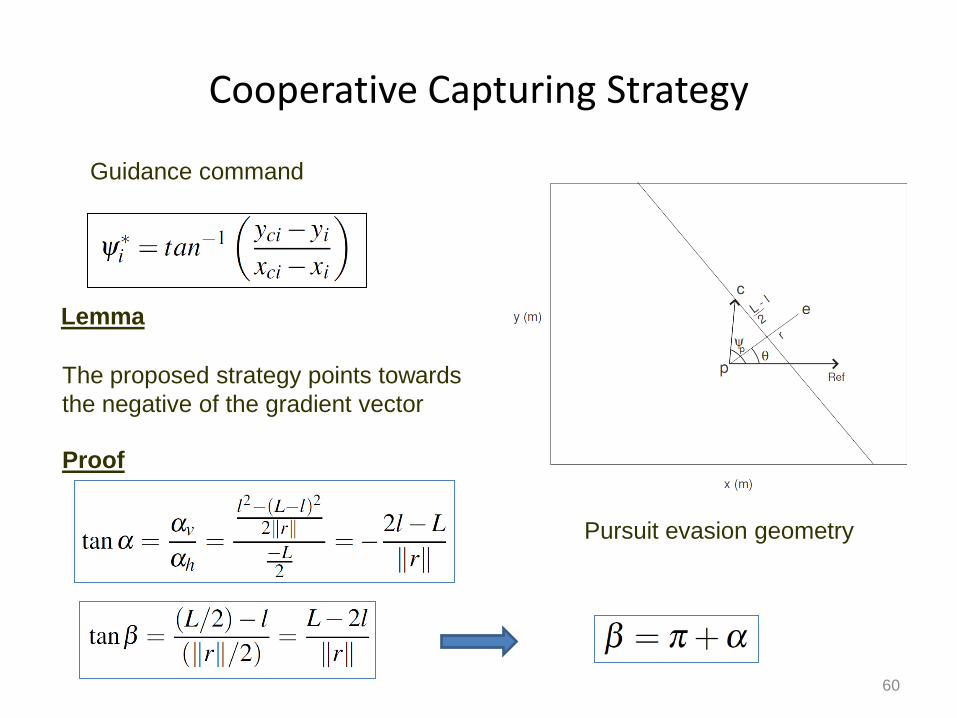
Cooperative Capturing Strategy
Pursuit evasion geometry
Lemma
The proposed strategy points towards
the negative of the gradient vector
Proof
Guidance command
60
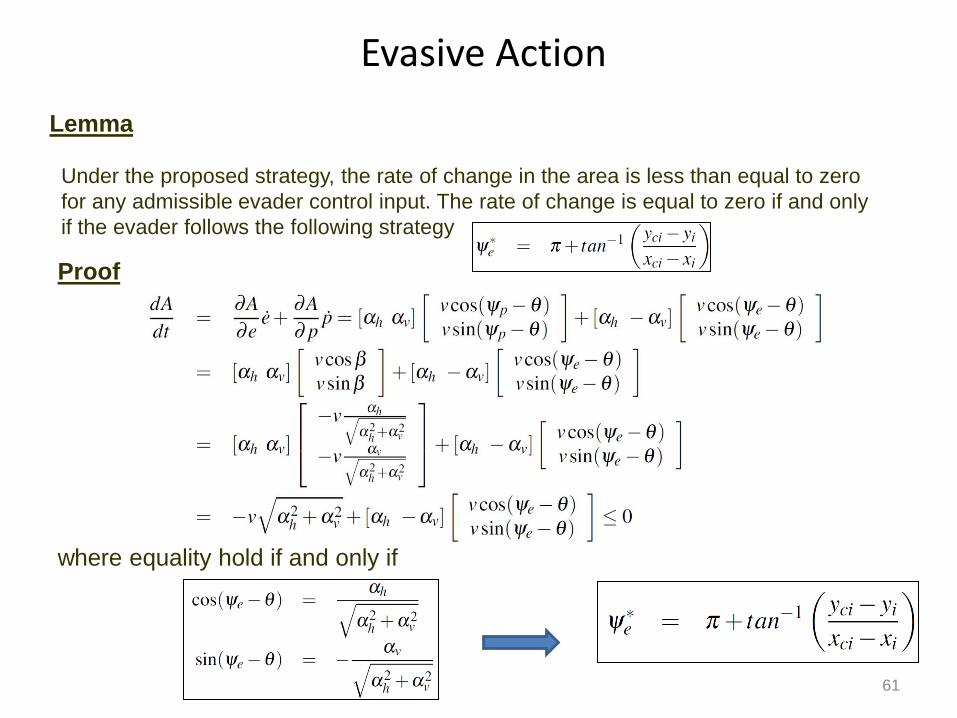
Evasive Action
Lemma
Under the proposed strategy, the rate of change in the area is less than equal to zero
for any admissible evader control input. The rate of change is equal to zero if and only
if the evader follows the following strategy
Proof
where equality hold if and only if
61
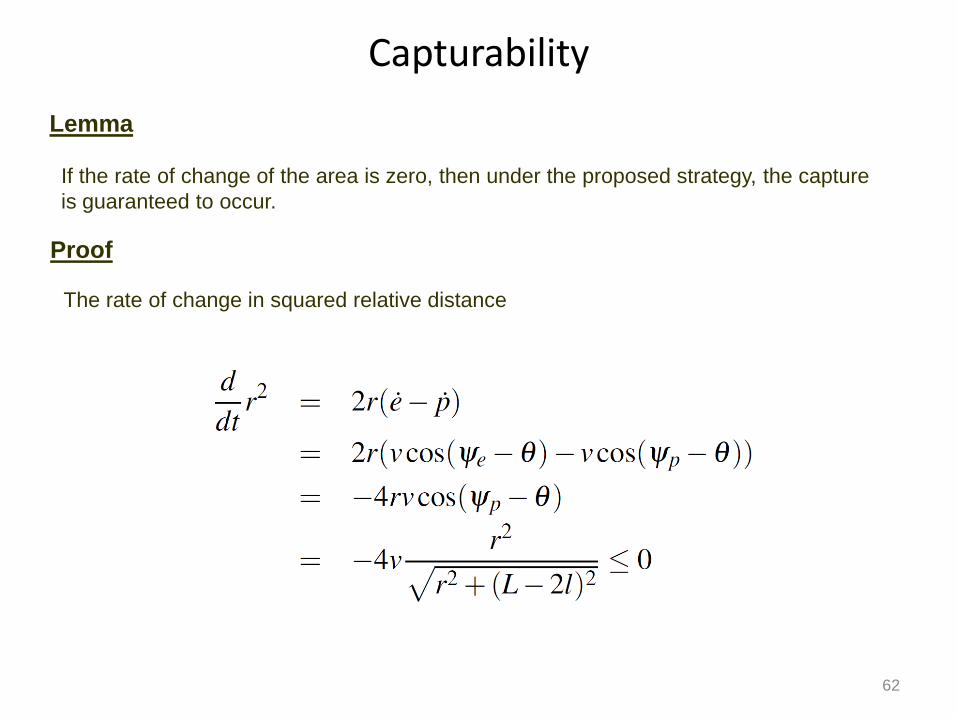
Capturability
The rate of change in squared relative distance
Lemma
If the rate of change of the area is zero, then under the proposed strategy, the capture
is guaranteed to occur.
Proof
62
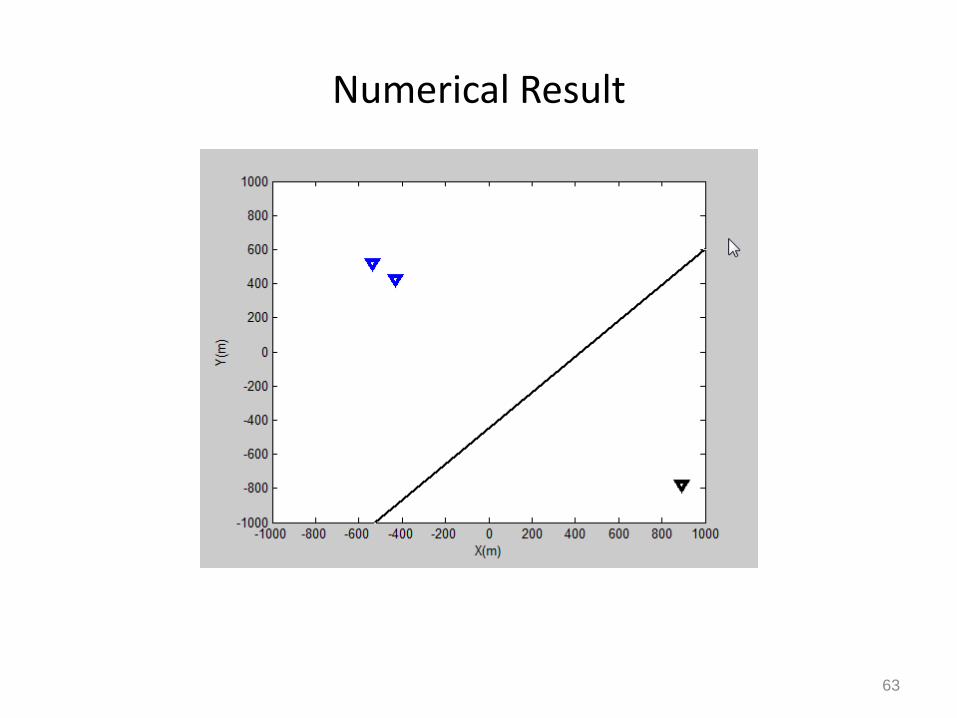
Numerical Result
63
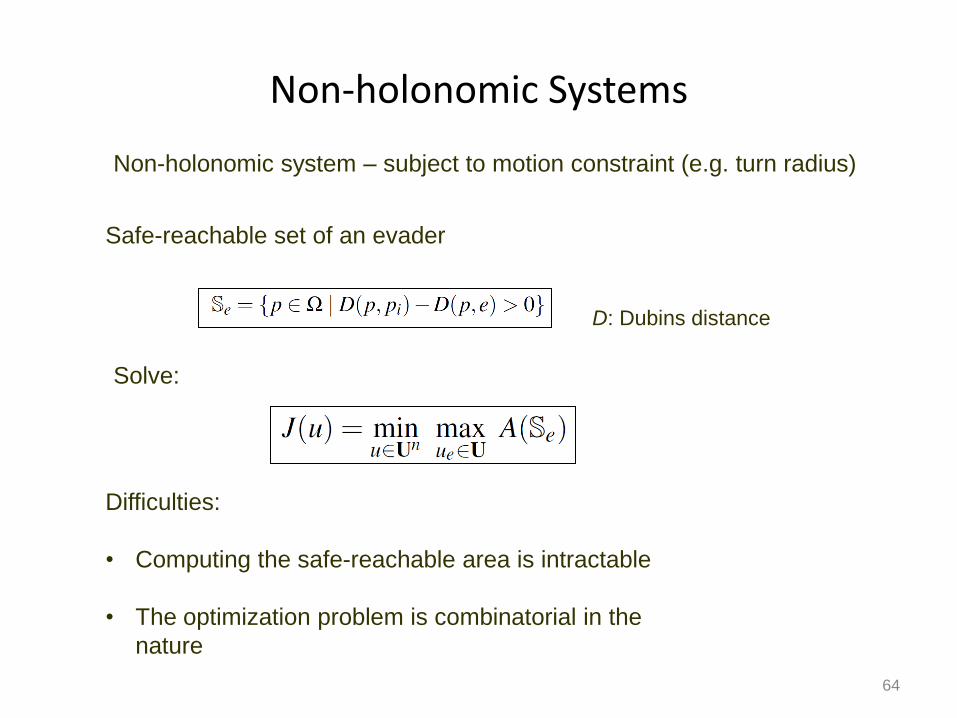
Non-holonomic Systems
Safe-reachable set of an evader
D: Dubins distance
Solve:
Difficulties:
• Computing the safe-reachable area is intractable
• The optimization problem is combinatorial in the
nature
Non-holonomic system – subject to motion constraint (e.g. turn radius)
64
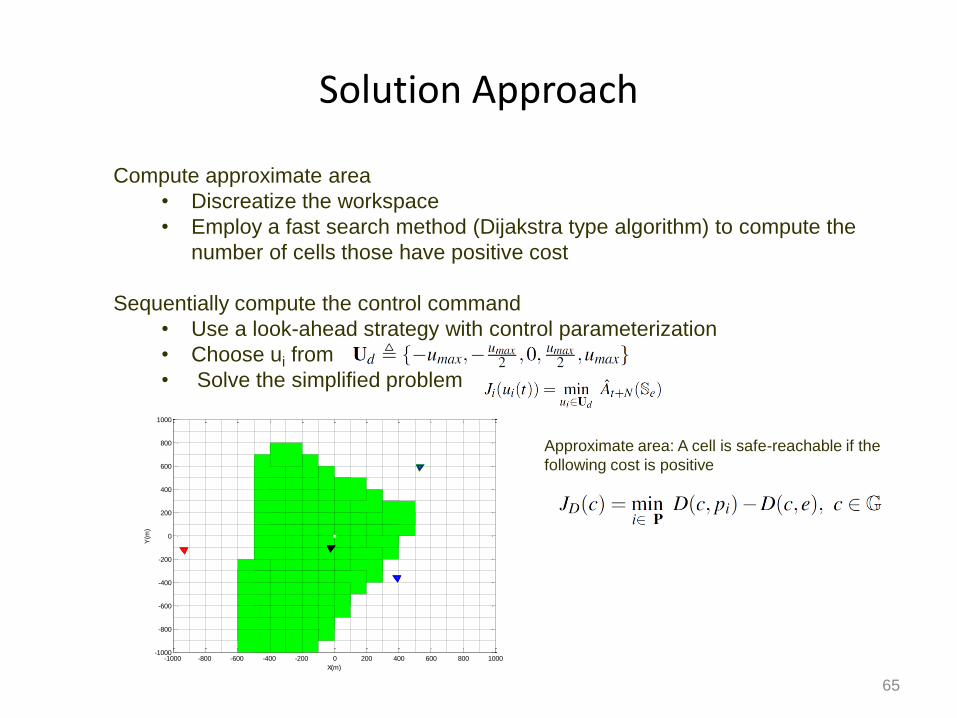
Solution Approach
Compute approximate area
• Discreatize the workspace
• Employ a fast search method (Dijakstra type algorithm) to compute the
number of cells those have positive cost
Sequentially compute the control command
• Use a look-ahead strategy with control parameterization
• Choose ui from
• Solve the simplified problem
-1000 -800 -600 -400 -200 0 200 400 600 800 1000-1000
-800
-600
-400
-200
0
200
400
600
800
1000
X(m)
Y(m
)
Approximate area: A cell is safe-reachable if the
following cost is positive
65
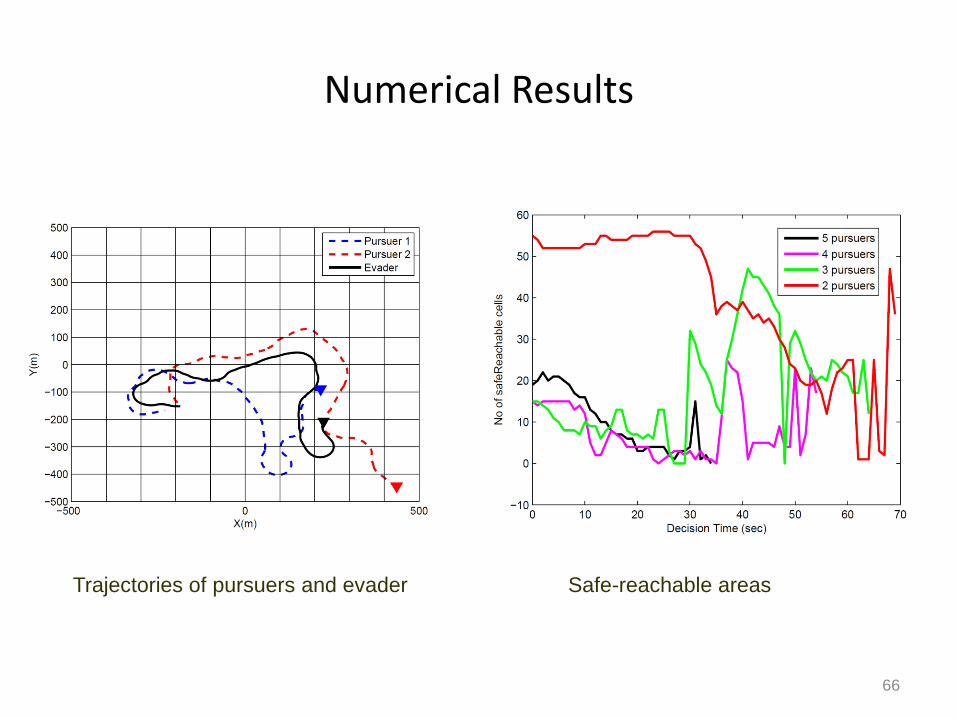
Numerical Results
66
Trajectories of pursuers and evader Safe-reachable areas
Cooperative PPN Law
• Pure Proportional navigation (PPN) law is used to design the capturing strategy
– The rate of rotation of the velocity vector is proportional to the rate of rotation of the LOS
– Easy to implement
– Optimal and efficient
– To capture attain (collision triangle condition) and then follow the collision course that result in a collision
– To avoid capture, apply invers-PN (I-PN) law
67
Numerical Result
68
Questions ???


















![[Project] Modelling and Control of Autonomous Quadrotor](https://img.pdfslide.net/doc/110x75/54752302b4af9f3f6b8b45aa/project-modelling-and-control-of-autonomous-quadrotor.jpg)










