Embed Size (px)
Citation preview
i
BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC MỎ ĐỊA CHẤT
PHẠM VĂN QUANG
NGHIÊN CỨU KẾT HỢP CÔNG NGHỆ GPS VÀ THỦY ÂM
TRONG ĐO VẼ BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN TỶ LỆ LỚN
PHỤC VỤ THIẾT KẾ CÁC CÔNG TRÌNH VEN BIỂN
LUẬN ÁN TIẾN SĨ KỸ THUẬT
HÀ NỘI – 2017
ii
BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC MỎ ĐỊA CHẤT
PHẠM VĂN QUANG
NGHIÊN CỨU KẾT HỢP CÔNG NGHỆ GPS VÀ THỦY ÂM
TRONG ĐO VẼ BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN TỶ LỆ LỚN
PHỤC VỤ THIẾT KẾ CÁC CÔNG TRÌNH VEN BIỂN
NGÀNH: KỸ THUẬT TRẮC ĐỊA – BẢN ĐỒ
MÃ SỐ : 62.52.05.03
LUẬN ÁN TIẾN SĨ KỸ THUẬT
NGƯỜI HƯỚNG DẪN KHOA HỌC:
1. PGS.TS. TRẦN VIẾT TUẤN
2. PGS.TS. NGUYỄN QUANG THẮNG
HÀ NỘI – 2017
iii
LỜI CAM ĐOAN
Tôi xin cam đoan đây là công trình nghiên cứu của riêng tôi, các kết
quả nghiên cứu được trình bày trong luận án là chính xác, trung thực, khách
quan và chưa từng được công bố trong công trình nào khác.
Hà Nội, ngày 10 tháng 02 năm 2017
Tác giả luận án
Phạm Văn Quang
iv
MỤC LỤC
DANH MỤC CÁC KÝ HIỆU, CHỮ VIẾT TẮT .................................................. iii
DANH MỤC CÁC BẢNG BIỂU........................................................................... iv
DANH MỤC CÁC HÌNH VẼ ................................................................................ v
MỞ ĐẦU ................................................................................................................ 1
Chương 1-TỔNG QUAN VỀ CÔNG TÁC ĐO VẼ THÀNH LẬP BẢN ĐỒ
ĐỊA HÌNH ĐÁY BIỂN PHỤC VỤ KHẢO SÁT THIẾT KẾ CÔNG TRÌNH
VEN BIỂN..............................................................................................................
8
1.1. Các dạng công trình xây dựng ven biển .......................................................... 8
1.2. Khái quát về công tác trắc địa trong giai đoạn khảo sát thiết kế công trình
ven biển...................................................................................................................
11
1.3. Tình hình nghiên cứu trong và ngoài nước về ứng dụng công nghệ GPS và
máy đo sâu hồi âm trong khảo sát thiết kế các công trình ven biển .......................
14
Chương 2- YÊU CẦU KỸ THUẬT THÀNH LẬP BẢN ĐỒ ĐỊA HÌNH ĐÁY
BIỂN VEN BỜ TỶ LỆ LỚN..................................................................................
18
2.1. Nội dung công tác thành lập BĐĐHĐB ven bờ tỷ lệ lớn................................ 18
2.2. Một số quy định về yêu cầu độ chính xác thành lập BĐĐHĐB...................... 22
2.3. Xây dựng luận cứ khoa học xác định yêu cầu độ chính xác của BĐĐHĐB
ven bờ tỷ lệ lớn ở Việt Nam ...................................................................................
30
Chương 3 - NGHIÊN CỨU KẾT HỢP CÔNG NGHỆ GPS VÀ THỦY ÂM
TRONG ĐO VẼ BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN TỶ LỆ LỚN .......................
41
3.1. Hệ thống định vị GPS trên biển....................................................................... 41
3.2. Ứng dụng máy đo sâu hồi âm trong đo vẽ thành lập BĐĐHĐB..................... 53
3.3. Phần mềm thường dùng trong đo sâu ở Việt Nam .......................................... 72
3.4. Nghiên cứu giải pháp kết nối hệ thống GPS và máy đo sâu hồi âm ............... 76
3.5. Nghiên cứu phương pháp kiểm định hệ thống GPS và máy đo sâu hồi âm.... 86
Chương 4 - NGHIÊN CỨU ỨNG DỤNG CÔNG NGHỆ ĐO CAO GPS
TRONG ĐO VẼ BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN VEN BỜ TỶ LỆ LỚN.........
94
4.1. Khái niệm về thủy triều ven bờ ....................................................................... 94
v
4.2. Công tác quan trắc thủy triều phục vụ thành lập BĐĐHĐB ven bờ ............... 97
4.3 . Công tác thành lập BĐĐHĐB ven bờ khi sử dụng kết quả đo thủy triều ...... 101
4.4. Ứng dụng công nghệ đo cao GPS - RTK trong đo sâu để thay thế số hiệu
chỉnh thủy triều .......................................................................................................
105
4.5. Giải pháp thu tín hiệu GPS - RTK trên tầu đo................................................. 108
4.6. Quy trình thành lập BĐĐHĐB ven bờ tỷ lệ lớn .............................................. 110
Chương 5 . PHẦN THỰC NGHIỆM ..................................................................... 119
5.1. Thực nghiệm khảo sát độ chính xác định vị mặt bằng của thiết bị thu GPS... 119
5.2.Thực nghiệm kết nối hệ thống GPS và máy đo sâu hồi âm.............................. 121
5.3. Thực nghiệm ứng dụng công nghệ đo cao GPS-RTK trong đo sâu để thay
thế số hiệu chỉnh thủy triều.....................................................................................
129
KẾT LUẬN VÀ KIẾN NGHỊ ................................................................................ 135
DANH MỤC CÁC CÔNG TRÌNH ĐÃ CÔNG BỐ CỦA TÁC GIẢ ................... 136
TÀI LIỆU THAM KHẢO ...................................................................................... 137
PHẦN PHỤ LỤC ................................................................................................... 141
PHỤ LỤC 1: Kết quả tính độ cao đáy biển theo kết quả quan trắc thủy triều ....... 142
PHỤ LỤC 2: Bảng so sánh kết quả tính độ cao đáy biển theo hai phương pháp:
quan trắc thủy triều và đo bằng phương pháp RTK ...............................................
145
PHỤ LỤC 3: Bảng số liệu mực nước đỉnh và chân triều tại Trạm Hải văn
Vũng Tàu ................................................................................................................
150
vi
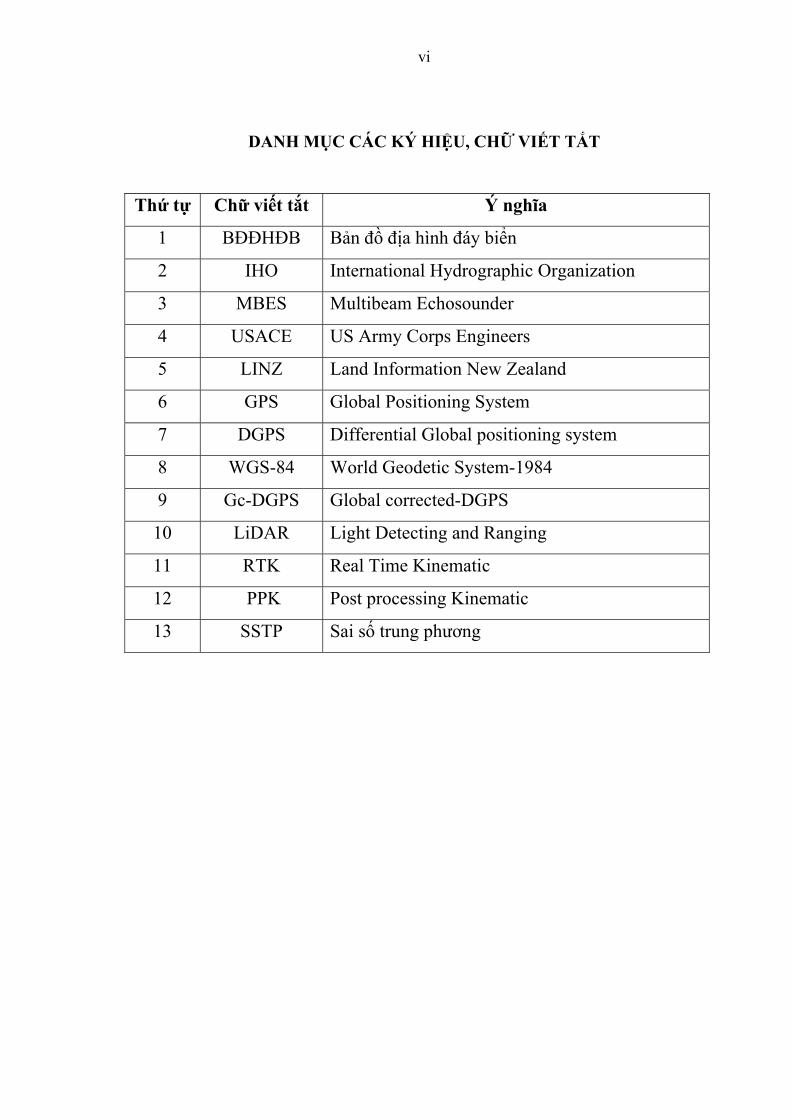
DANH MỤC CÁC KÝ HIỆU, CHỮ VIẾT TẮT
Thứ tự Chữ viết tắt Ý nghĩa
1 BĐĐHĐB Bản đồ địa hình đáy biển
2 IHO International Hydrographic Organization
3 MBES Multibeam Echosounder
4 USACE US Army Corps Engineers
5 LINZ Land Information New Zealand
6 GPS Global Positioning System
7 DGPS Differential Global positioning system
8 WGS-84 World Geodetic System-1984
9 Gc-DGPS Global corrected-DGPS
10 LiDAR Light Detecting and Ranging
11 RTK Real Time Kinematic
12 PPK Post processing Kinematic
13 SSTP Sai số trung phương
vii
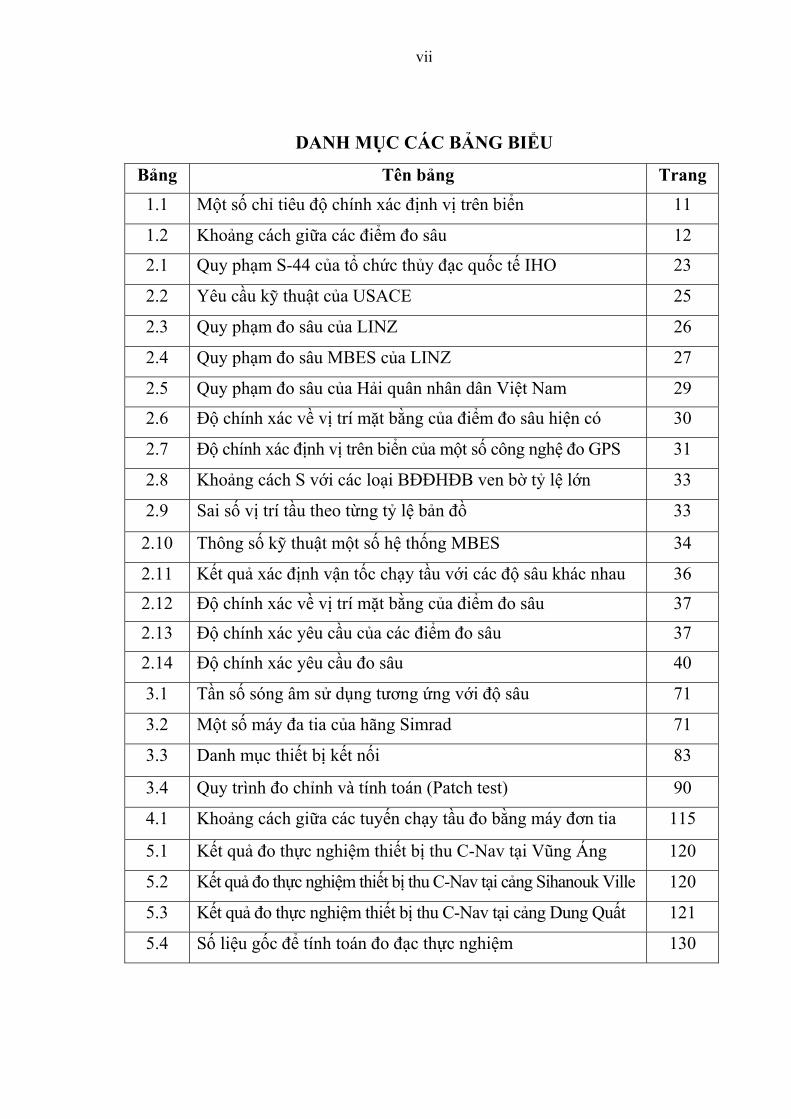
DANH MỤC CÁC BẢNG BIỂU
Bảng Tên bảng Trang 1.1 Một số chỉ tiêu độ chính xác định vị trên biển 11
1.2 Khoảng cách giữa các điểm đo sâu 12
2.1 Quy phạm S-44 của tổ chức thủy đạc quốc tế IHO 23
2.2 Yêu cầu kỹ thuật của USACE 25
2.3 Quy phạm đo sâu của LINZ 26
2.4 Quy phạm đo sâu MBES của LINZ 27
2.5 Quy phạm đo sâu của Hải quân nhân dân Việt Nam 29
2.6 Độ chính xác về vị trí mặt bằng của điểm đo sâu hiện có 30
2.7 Độ chính xác định vị trên biển của một số công nghệ đo GPS 31
2.8 Khoảng cách S với các loại BĐĐHĐB ven bờ tỷ lệ lớn 33
2.9 Sai số vị trí tầu theo từng tỷ lệ bản đồ 33
2.10 Thông số kỹ thuật một số hệ thống MBES 34
2.11 Kết quả xác định vận tốc chạy tầu với các độ sâu khác nhau 36
2.12 Độ chính xác về vị trí mặt bằng của điểm đo sâu 37
2.13 Độ chính xác yêu cầu của các điểm đo sâu 37
2.14 Độ chính xác yêu cầu đo sâu 40
3.1 Tần số sóng âm sử dụng tương ứng với độ sâu 71
3.2 Một số máy đa tia của hãng Simrad 71
3.3 Danh mục thiết bị kết nối 83
3.4 Quy trình đo chỉnh và tính toán (Patch test) 90
4.1 Khoảng cách giữa các tuyến chạy tầu đo bằng máy đơn tia 115
5.1 Kết quả đo thực nghiệm thiết bị thu C-Nav tại Vũng Áng 120
5.2 Kết quả đo thực nghiệm thiết bị thu C-Nav tại cảng Sihanouk Ville 120
5.3 Kết quả đo thực nghiệm thiết bị thu C-Nav tại cảng Dung Quất 121
5.4 Số liệu gốc để tính toán đo đạc thực nghiệm 130
viii
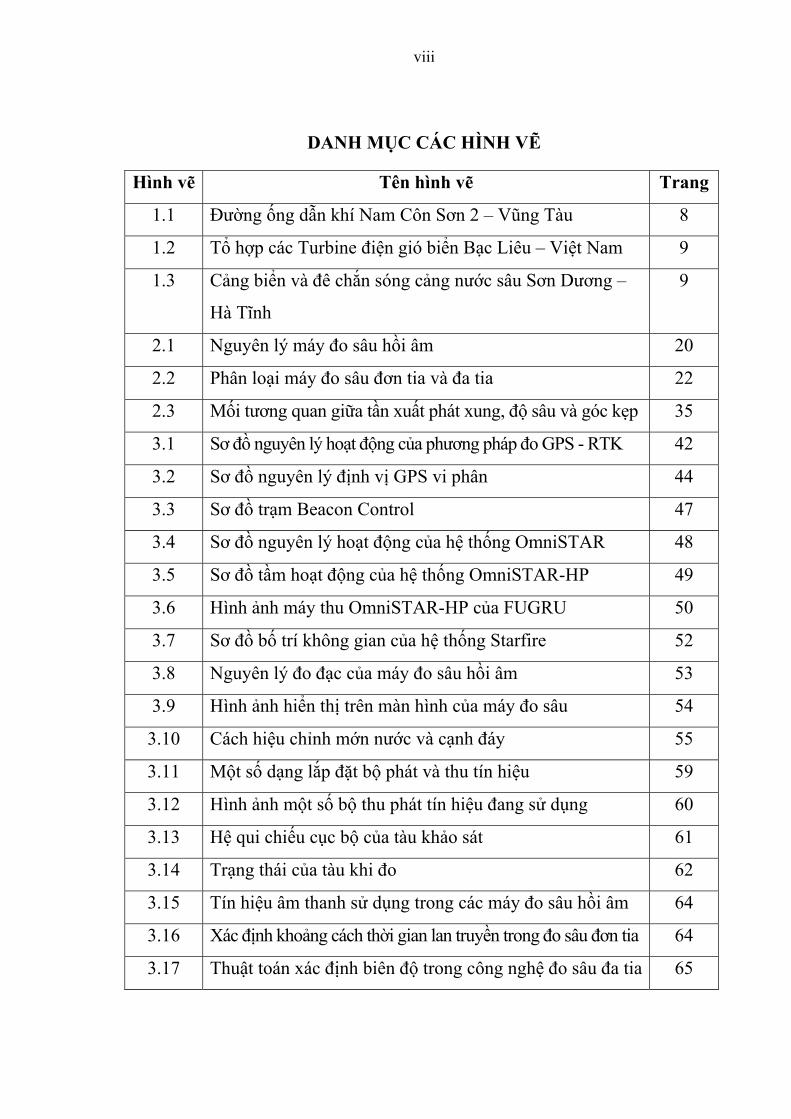
DANH MỤC CÁC HÌNH VẼ
Hình vẽ Tên hình vẽ Trang
1.1 Đường ống dẫn khí Nam Côn Sơn 2 – Vũng Tàu 8
1.2 Tổ hợp các Turbine điện gió biển Bạc Liêu – Việt Nam 9
1.3 Cảng biển và đê chắn sóng cảng nước sâu Sơn Dương –
Hà Tĩnh
9
2.1 Nguyên lý máy đo sâu hồi âm 20
2.2 Phân loại máy đo sâu đơn tia và đa tia 22
2.3 Mối tương quan giữa tần xuất phát xung, độ sâu và góc kẹp 35
3.1 Sơ đồ nguyên lý hoạt động của phương pháp đo GPS - RTK 42
3.2 Sơ đồ nguyên lý định vị GPS vi phân 44
3.3 Sơ đồ trạm Beacon Control 47
3.4 Sơ đồ nguyên lý hoạt động của hệ thống OmniSTAR 48
3.5 Sơ đồ tầm hoạt động của hệ thống OmniSTAR-HP 49
3.6 Hình ảnh máy thu OmniSTAR-HP của FUGRU 50
3.7 Sơ đồ bố trí không gian của hệ thống Starfire 52
3.8 Nguyên lý đo đạc của máy đo sâu hồi âm 53
3.9 Hình ảnh hiển thị trên màn hình của máy đo sâu 54
3.10 Cách hiệu chỉnh mớn nước và cạnh đáy 55
3.11 Một số dạng lắp đặt bộ phát và thu tín hiệu 59
3.12 Hình ảnh một số bộ thu phát tín hiệu đang sử dụng 60
3.13 Hệ qui chiếu cục bộ của tàu khảo sát 61
3.14 Trạng thái của tàu khi đo 62
3.15 Tín hiệu âm thanh sử dụng trong các máy đo sâu hồi âm 64
3.16 Xác định khoảng cách thời gian lan truyền trong đo sâu đơn tia 64
3.17 Thuật toán xác định biên độ trong công nghệ đo sâu đa tia 65
ix
3.18 Thuật toán xác định pha trong công nghệ đo sâu 66
3.19a Tia âm được phát từ hai mảng phụ 67
3.19b Xác định thời gian từ hiệu pha 67
3.20 Quá trình xử lý theo thuật toán FFT 67
3.21 Chồng phủ trong hệ thống MBES 69
3.22 Bố trí góc tia quét bằng nhau 70
3.23 Bố trí khoảng cách tia quét bằng nhau 70
3.24 Giao diện chính của phần mềm QINSy 75
3.25 Qui ước các trục tọa độ X,Y,Z 76
3.26 Sơ đồ kết nối hệ thống đo sâu đơn tia hoặc đa tia 78
3.27 Sơ đồ kết nối máy đo sâu đơn tia 79
3.28 Màn hình hiển thị tình trạng kết nối 80
3.29 Menu kiểm nghiệm máy đo sâu đơn tia 81
3.30 Sơ đồ kết nối hình ảnh 82
3.31 Lắp đặt hoàn thiện 83
3.32 Lắp đặt trên giá 83
3.33 Sơ đồ phương pháp xác định độ lệch phương vị 84
3.34 Hệ tọa độ của tầu đo 84
3.35 Nhập vào phần mềm 7 tham số tính chuyển 85
3.36 Nhập vào phần mềm giá trị mớn nước của tầu đo 85
3.37 Mô đun tính các độ lệch Pitch, Roll, Heading của phần
mềm QINSy
86
3.38 Sơ đồ kiểm tra độ trễ định vị 87
3.39 Sơ đồ kiểm tra độ trễ định vị với địa vật 87
3.40 Sơ đồ kiểm tra độ lắc dọc 88
3.41 Sơ đồ kiểm tra độ lệch phương vị 89
x
3.42 Sơ đồ kiểm tra độ lắc dọc 90
4.1 Đồ thị biểu diễn số liệu quan trắc triều 100
4.2 Mối quan hệ giữa kết quả đo sâu và số liệu quan trắc thủy triều 102
4.3 Quan trắc thủy triều bằng thước đo mực nước biển 103
4.4 Quan trắc thủy triều bằng thiết bị đo triều kí 103
4.5 Đo vẽ BĐ ĐHĐB ven bờ bằng công nghệ GPS-RTK và
máy đo sâu hồi âm
105
4.6 Mô hình Geoid EGM 2008 khu vực ven biển Vũng Tàu 107
4.7 Kết nối phần mềm HcLoader với RoverGPS 109
4.8 Lựa chọn định dạng dữ liệu NMEA 109
4.9 Kết thúc thiết đặt chương trình 110
4.10 Quy trình công nghệ thành lập bản đồ địa hình đáy biển 111
4.11 Bố trí tuyến đo sâu tại cảng Phú Quốc 112
4.12 Bố trí tuyến đo sâu tại Cam Ranh – Khánh Hòa 113
4.13 Bố trí tuyến đo dạng tia 114
4.14 Bố trí tuyến tăng dày 114
4.15 Quan hệ giữa độ sâu và độ rộng dải quét 115
5.1 Đo đạc bằng hệ thống C-Nav tại Vũng Áng 119
5.2 Trạm Base đo RTK 122
5.3 Lắp đặt vị trí ăng ten không trùng cần phát triển 122
5.4 Lắp đặt vị trí ăng ten trùng cần phát triển 123
5.5 Lắp đặt hệ thống GPS và máy đo sâu hồi âm 123
5.6 Đo thực nghiệm máy đo sâu hồi âm đơn tia 124
5.7 Hình ảnh tầu đo sâu tại cảng Hải Phòng 124
5.8 Lắp đặt cần phát biến máy đo sâu trên tầu đo 125
5.9 Lắp đặt ăng ten định vị trên tầu đo 125
xi
5.10 Kiểm định hệ thống GPS và máy đo sâu hồi âm 125
5.11 Ghép nối máy thu GC-GPS với máy đa tia Sonic 126
5.12 Kết nối hệ thống GPS và máy đo sâu đa tia 126
5.13 Kết quả kiểm định độ lắc dọc của tầu đo sâu (Roll) 127
5.14 Kết quả kiểm định độ lắc ngang của tầu đo sâu (Pitch) 127
5.15 Kết quả kiểm định độ nâng hạ của tầu đo sâu (Heading) 128
5.16 Kiểm tra barcheck trước khi đo 128
5.17 Vị trí khu đo thực nghiệm 129
5.18 Trạm hải văn Vũng Tàu 130
5.19 Máy đo sâu đơn tia ECHOTRAC MKIII 131
5.20 Máy đo sâu R2SONIC -2024 131
5.21 Trạm Base số 2 tại điểm tuyến cáp tiếp bờ 132
5.22 Vị trí đặt ăng ten máy thu trên tầu 132
5.23 Định dạng file dữ liệu đo RTK 133
1
MỞ ĐẦU
1. Tính cấp thiết của luận án
Việt Nam có diện tích hơn 330000 km² bao gồm khoảng 327480 km²
đất liền và hơn 4200 km² biển nội thuỷ, với hơn 4000 hòn đảo, bãi đá ngầm
lớn nhỏ gần và xa bờ. Cả vùng nội thuỷ, lãnh hải, vùng đặc quyền kinh tế và
thềm lục địa có diện tích gấp gần ba lần diện tích đất liền, khoảng trên một
triệu km²; 28 trong tổng số 64 tỉnh thành phố nước ta nằm ven biển, diện tích
các huyện ven biển chiếm 17% tổng diện tích và là nơi sinh sống của hơn 1/5
dân số cả nước. Việt Nam là quốc gia có hai mặt giáp biển, đặc biệt trong đó
Biển Đông là một trong 6 biển lớn nhất của thế giới, nối hai đại dương là Thái
Bình Dương và Ấn Độ Dương; với 9 quốc gia bao bọc: Việt Nam, Trung
Quốc, Philippines, Indonesia, Brunei, Malaysia, Singapore, Thái Lan và
Campuchia. Đây cũng là con đường chiến lược của giao thương quốc tế, có
5/10 tuyến đường hàng hải lớn nhất của hành tinh đi qua.
Trong đề cương chiến lược phát triển kinh tế biển Việt Nam đến năm
2020 nêu rõ: Phải phấn đấu để nước ta trở thành một quốc gia mạnh về biển,
giàu lên từ biển, bảo vệ vững chắc chủ quyền, quyền chủ quyền quốc gia trên
biển, góp phần giữ vững ổn định và phát triển đất nước; kết hợp chặt chẽ giữa
phát triển kinh tế - xã hội với đảm bảo quốc phòng, an ninh và bảo vệ môi
trường; có chính sách hấp dẫn nhằm thu hút mọi nguồn lực cho phát triển
kinh tế biển; xây dựng các trung tâm kinh tế lớn vùng duyên hải gắn với các
hoạt động kinh tế biển làm động lực quan trọng đối với sự phát triển của cả
nước. Phấn đấu đến năm 2020, kinh tế biển đóng góp khoảng 53 - 55% GDP,
55 - 60% kim ngạch xuất khẩu của cả nước, giải quyết tốt các vấn đề xã hội,
cải thiện một bước đáng kể đời sống của nhân dân vùng biển và ven biển.
Để thực hiện chiến lược này việc đầu tư xây dựng cơ sở hạ tầng để phục
vụ cho việc khai thác các nguồn lợi từ biển là rất cần thiết và khẩn trương trong
đó phải kể đến như tổ hợp các công trình cảng biển, luồng tàu, đê chắn sóng,
2
cầu cảng, bến cảng, kho chứa; xây dựng các nhà máy sửa chữa và đóng mới tàu
biển có công suất lớn; khai thác thế mạnh các khu kinh tế ven biển, cảng nội
thủy; mở mới các tuyến giao thông đường thủy để giảm áp lực trung chuyển
hàng hóa cho giao thông đường bộ, nâng cấp cơ sở hạ tầng cho vịnh Cam Ranh
phục vụ cho mục đích quốc phòng… Bên cạnh đó cần xúc tiến các dự án trọng
điểm nhằm khai thác tài nguyên vốn có trên biển như dầu, khí đốt, lắp đặt các
turbine để khai thác năng lượng gió biển, các tuyến cáp ngầm trên biển … Như
vậy vai trò và nhiệm vụ của công tác trắc địa trong khảo sát phục vụ thiết kế
các công trình ven biển là rất quan trọng, cần có một bước phát triển mới về
công nghệ để đáp ứng được nhu cầu phát triển thực tế hiện nay về tiến độ, số
lượng, chất lượng, độ chính xác và hiệu quả kinh tế.
Ở nước ta, đo vẽ bản đồ địa hình tỷ lệ lớn phần trên cạn đã cơ bản đáp
ứng được yêu cầu của công tác thiết kế (đã thành lập bản đồ đến tỷ lệ 1/500),
tuy nhiên với bản đồ địa hình đáy biển nói chung mới tiến hành đo đạc ở tỷ lệ
bản đồ lớn nhất là 1/10 000 nên chưa đáp ứng được các yêu cầu cần thiết của
công tác khảo sát thiết kế xây dựng các công trình biển ven bờ. Với các bản
vẽ thiết kế chi tiết các hạng mục công trình để phục vụ cho bước lập dự án,
thiết kế kỹ thuật - thi công theo tiêu chuẩn ngành cần có bản đồ địa hình tỷ lệ
lớn từ 1/5000÷1/500 [30].
Hiện nay có rất nhiều dự án liên quan đến biển đang được triển khai và
đã được đưa vào sử dụng như: Khu kinh tế biển Nghi Sơn, cảng Vũng Áng,
cảng Chân Mây, cảng Lạch Huyện, nhà máy đóng tàu Hạ Long, nhà máy
đóng tàu Phà Rừng - Nam Triệu, cảng Sài Gòn, cảng Cát Lái, cảng Đồng Nai,
cảng Hải Phòng và gần đây nhất là dự án đường ống dẫn khí Lô B - Ô Môn
thành phố Cần Thơ… Nhưng hầu hết công tác đo vẽ địa hình đáy biển tỷ lệ
lớn ven bờ dùng để phục vụ công tác khảo sát, thiết kế các công trình trọng
điểm này chúng ta đều thuê các công ty nước ngoài bởi họ có phương tiện,
máy móc và chuyên gia kỹ thuật.
3
Vì vậy mà việc nghiên cứu ứng dụng các công nghệ và thiết bị hiện đại
dùng cho đo vẽ bản đồ địa hình đáy biển tỷ lệ lớn phù hợp với điều kiện và
tiêu chuẩn kỹ thuật của Việt Nam là rất cần thiết. Đó cũng chính là mục tiêu
nghiên cứu của đề tài mà chúng tôi thực hiện.
Ở Việt Nam cũng có rất nhiều nghiên cứu về công tác đo đạc trên biển
nhưng mới chỉ dừng lại ở từng thiết bị cụ thể: Công nghệ định vị GPS hoặc
các thiết bị thủy âm, máy đo sâu hồi âm… Chưa có một đề tài nghiên cứu về
ứng dụng kết hợp các công nghệ tiên tiến, thành lập quy trình để đo vẽ bản đồ
địa hình đáy biển ven bờ tỷ lệ lớn.
Các công ty đo đạc biển ở Việt Nam do không có tàu đo sâu chuyên
dụng nên khi đo thường phải thuê thuyền đo, công việc bắt đầu là ghép nối
các thiết bị, tích hợp công nghệ, kiểm nghiệm và hiệu chỉnh thiết bị đo với
mục đích đảm bảo độ chính xác theo tỷ lệ bản đồ cần thành lập.
Khi đo đạc trên biển sử dụng các thiết bị khác so với đo vẽ trên đất liền,
vì khi đo sâu thường sử dụng các thiết bị đo đạc có nguyên lý và cấu tạo hoàn
toàn khác, vấn đề phải kết nối ra sao để đảm bảo độ chính xác khi đo vẽ bản
đồ địa hình đáy biển.
Cũng giống như các nội dung nghiên cứu đo đạc trên đất liền, việc
hoàn thiện ghép nối tích hợp các công nghệ đo đạc tiên tiến trên biển dùng
cho mục đích thành lập bản đồ địa hình đáy biển tỷ lệ lớn có độ chính xác cao
về mặt bằng và độ cao vẫn còn rất nhiều vấn đề cần giải quyết, cần được
nghiên cứu một cách kỹ lưỡng, để đưa ra các giải pháp nhằm nâng cao độ
chính xác và độ tin cậy của sản phẩm đo đạc.
Từ những nhu cầu thực tế trên ở nước ta, trong luận án tiến hành
nghiên cứu đề tài “Nghiên cứu kết hợp công nghệ GPS và thủy âm trong đo
vẽ bản đồ địa hình đáy biển tỷ lệ lớn phục vụ khảo sát thiết kế các công trình
ven biển”.
4
2. Mục đích, đối tượng và phạm vi nghiên cứu
- Mục đích nghiên cứu của luận án là nghiên cứu ứng dụng công nghệ
và thiết bị đo đạc tiến tiến hiện nay nhằm nâng cao hiệu quả công tác đo đạc,
thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn.
- Đối tượng nghiên cứu của đề tài là nghiên cứu kết hợp công nghệ
GPS và thủy âm trong đo vẽ bản đồ địa hình đáy biển tỷ lệ lớn.
- Phạm vi nghiên cứu của luận án: Các thiết bị thủy âm ứng dụng trong đo vẽ thành lập BĐĐHĐB rất đa dạng như hệ thống thu phát thủy âm dưới đáy biển, thiết bị quét hình bằng sóng siêu âm SSS (Side Scan Sonar)…. Trong giới hạn phạm vi luận án nghiên cứu là ứng dụng công nghệ GPS và máy đo sâu hồi âm phục vụ công tác đo vẽ bản đồ địa hình đáy biển ven bờ tỷ
lệ lớn ở Việt Nam (phần địa hình đáy biển ven bờ cách đất liền ≤ 10 km).
3. Nội dung nghiên cứu - Nghiên cứu yêu cầu độ chính xác và nội dung đo đạc thành lập bản đồ
địa hình đáy biển ven bờ phục vụ khảo sát thiết kế các công trình xây dựng ven biển.
- Nghiên cứu khả năng ứng dụng công nghệ định vị vệ tinh GPS và đo sâu hồi âm trong đo vẽ bản đồ địa hình đáy biển ven bờ.
- Nghiên cứu mô hình kết hợp công nghệ định vị vệ tinh GPS và đo sâu hồi âm, phương pháp kiểm định hệ thống thiết bị nêu trên dùng trong đo vẽ bản đồ địa hình đáy biển ven bờ ở nước ta.
- Nghiên cứu các giải pháp kỹ thuật nhằm nâng cao hiệu quả công tác thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn. 4. Phương pháp nghiên cứu
- Phương pháp thống kê: Tìm kiếm, thu thập tài liệu liên quan, cập nhật thông tin trên mạng Internet và các thư viện.
- Phương pháp nghiên cứu lý thuyết: Nghiên cứu lý thuyết về công
nghệ định vị vệ tinh GPS và máy đo sâu hồi âm, vấn đề tích hợp công nghệ
làm cơ sở lý luận cho việc xử lý số liệu.
5
- Phương pháp thực nghiệm: Tiến hành các thực nghiệm để chứng minh
lý thuyết, khẳng định tính đúng đắn, khả thi và đi đến kết luận.
- Phương pháp so sánh: Đối chiếu với các kết quả nghiên cứu khác
hoặc các nội dung liên quan để so sánh, đánh giá, đưa ra giải pháp phù hợp
với vấn đề nghiên cứu.
- Phương pháp ứng dụng tin học: Dùng các phần mềm phù hợp để xây
dựng các chương trình tính toán xử lý số liệu đo đạc.
- Phương pháp chuyên gia: Tiếp thu ý kiến của người hướng dẫn, tham
khảo ý kiến các nhà khoa học, đồng nghiệp về các vấn đề trong nội dung của
luận án.
5. Ý nghĩa khoa học và thực tiễn của luận án
Các kết quả nghiên cứu trong luận án góp phần hoàn thiện và nâng
cao hiệu quả công tác thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn ở
Việt Nam.
Giải pháp ứng dụng công nghệ đo cao GPS - RTK trong công tác thành
lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn cho phép xác định trực tiếp độ
cao đáy biển mà không phải đo thủy triều.
Có thể ứng dụng kết quả nghiên cứu trong luận án vào các lĩnh vực
chuyển giao công nghệ mới, đào tạo cán bộ chuyên ngành, giảng dạy và
nghiên cứu khoa học.
6. Các luận điểm bảo vệ
Luận điểm 1: Để đảm bảo chất lượng công tác khảo sát thiết kế các
công trình ven biển cần xây dựng các chỉ tiêu kỹ thuật hợp lý, phù hợp với
đặc điểm thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn ở Việt Nam.
Luận điểm 2: Cần tiến hành ghép nối và kiểm định hệ thống GPS và
máy đo sâu hồi âm theo quy trình kỹ thuật phù hợp nhằm đảm bảo độ chính
xác thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn.
6
Luận điểm 3: Có thể sử dụng công nghệ GPS-RTK kết hợp với máy đo
sâu hồi âm để nâng cao hiệu quả công tác đo vẽ bản đồ địa hình đáy biển ven
bờ tỷ lệ lớn.
7. Các điểm mới của luận án
- Đã nghiên cứu xây dựng luận cứ khoa học và đề xuất các chỉ tiêu kỹ
thuật trong đo vẽ thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn ở Việt
Nam phục vụ khảo sát thiết kế các công trình ven biển.
- Xây dựng được mô hình, quy trình phù hợp để ghép nối và kiểm định
hệ thống GPS và máy đo sâu hồi âm.
- Đã nghiên cứu ứng dụng thành công công nghệ GPS - RTK kết hợp với
máy đo sâu hồi âm trong đo vẽ bản đồ địa hình đáy biển ven bờ tỷ lệ lớn không
cần đo nghiệm triều. Nghiên cứu này cho phép nâng cao hiệu quả công tác
khảo sát thiết kế trong thi công xây dựng các công trình ven biển ở Việt Nam.
8. Cấu trúc và nội dung luận án
Cấu trúc luận án gồm ba phần:
1. Phần mở đầu: Giới thiệu tổng quan về luận án, tính cấp thiết, mục
đích, ý nghĩa, nêu các luận điểm bảo vệ và điểm mới của luận án, trình bày
tóm tắt cấu trúc và nội dung luận án.
2. Phần nội dung nghiên cứu được trình bày trong 5 chương
Chương 1: Tổng quan về công tác đo vẽ thành lập bản đồ địa hình đáy
biển phục vụ khảo sát thiết kế công trình ven biển.
Chương 2: Yêu cầu kỹ thuật thành lập bản đồ địa hình đáy biển ven bờ
tỷ lệ lớn.
Chương 3: Nghiên cứu kết hợp công nghệ GPS và thuỷ âm trong đo vẽ
bản đồ địa hình đáy biển ven bờ tỷ lệ lớn.
Chương 4: Nghiên cứu ứng dụng công nghệ đo cao GPS trong đo vẽ
bản đồ địa hình đáy biển ven bờ tỷ lệ lớn.
7
Chương 5: Phần thực nghiệm.
3. Phần kết luận: Tổng hợp lại những vấn đề nghiên cứu trong luận án,
đưa ra những nhận xét, đánh giá khả năng ứng dụng và giải pháp nâng cao
hiệu quả của công tác đo đạc trong thành lập bản đồ địa hình đáy biển ven bờ
tỷ lệ lớn ở Việt Nam.
9. Lời cảm ơn
Trước hết, tác giả xin gửi lời biết ơn sâu sắc nhất đến tiểu ban hướng
dẫn khoa học PGS.TS Trần Viết Tuấn và PGS.TS Nguyễn Quang Thắng đã
luôn động viên, tận tình góp ý và định hướng cho tác giả thực hiện các nghiên
cứu khoa học, hoàn thành luận án.
Tác giả xin chân thành cảm ơn Ban Giám hiệu Trường Đại học Mỏ -
Địa chất, Phòng Đào tạo sau đại học, các thầy cô trong khoa Trắc địa - Bản đồ
và Quản lý đất đai và đặc biệt là bộ môn Trắc địa công trình đã giúp đỡ và có
nhiều ý kiến quý báu để tác giả hoàn thiện nội dung của luận án.
Tác giả xin chân thành cảm ơn gia đình, bạn bè đồng nghiệp đã luôn
động viên tinh thần, tạo mọi điều kiện giúp đỡ tác giả trong quá trình thực
hiện luận án.
8
Chương 1
TỔNG QUAN VỀ CÔNG TÁC ĐO VẼ THÀNH LẬP BẢN ĐỒ
ĐỊA HÌNH ĐÁY BIỂN PHỤC VỤ KHẢO SÁT THIẾT KẾ
CÔNG TRÌNH VEN BIỂN
1.1. CÁC DẠNG CÔNG TRÌNH XÂY DỰNG VEN BIỂN
1.1.1. Khái niệm về các công trình biển và công tác trắc địa công trình biển Công trình biển là các công trình được xây dựng trên biển và ven bờ
với mục đích sử dụng và khai thác các nguồn lợi tài nguyên thiên nhiên của
biển. Công trình biển có thể được chia làm ba dạng chủ yếu [21]:
- Các công trình sử dụng không gian biển: Tầu thuyền giao thông, vận
tải, các đường cáp quang, cáp điện, đường ống dẫn khí (hình 1.1) hay các
công trình ngầm xuyên biển.
Hình 1.1 - Đường ống dẫn khí Nam Côn Sơn 2 – Vũng Tàu
- Các công trình khai thác tài nguyên thiên nhiên, năng lượng biển: Các
công trình khai thác dầu khí, dàn khoan, khai thác khoáng vật, các công trình
nuôi trồng thủy hải sản, các công trình khai thác năng lượng thủy triều, năng
lượng gió (hình 1.2).
9
Hình 1.2 - Tổ hợp các turbine điện gió biển Bạc Liêu – Việt Nam
- Các công trình khai thác biển ven bờ: Đó là hệ thống các công trình
cảng biển, hệ thống đê chắn sóng (hình 1.3).
Hình 1.3 - Cảng biển và đê chắn sóng cảng nước sâu Sơn Dương, Hà Tĩnh
Công tác trắc địa công trình trên biển cũng có nhiệm vụ tương tự như
công tác trắc địa công trình trên đất liền. Tuy nhiên do môi trường làm việc có
sự khác biệt như: Làm việc trên biển là chủ yếu, môi trường làm việc luôn
biến động, ít vật định hướng, chịu tác động của thủy triều ... nên công tác trắc
địa trên biển cũng có nhiều điểm khác biệt. Tuỳ thuộc vào đặc điểm, phạm vi,
vị trí và giai đoạn xây dựng của từng công trình mà có các nhiệm vụ trắc địa
10
khác nhau. Một cách tổng quát có thể phân loại công tác trắc địa công trình
biển theo các giai đoạn khảo sát thiết kế, thi công xây dựng và khai thác sử
dụng công trình.
1.1.2. Nhiệm vụ công tác định vị trong trắc địa công trình biển Đặc điểm nổi bật của công tác trắc địa công trình biển là phải tiến hành
đo đạc trong điều kiện đặc biệt khó khăn (sóng to và gió mạnh), xa đất liền, vì
vậy các phương pháp đo đạc định vị trên biển có ý nghĩa rất quan trọng khi
thực hiện các dạng công tác trong khảo sát thiết kế và thi công xây dựng công
trình biển. Ngoài ra công tác định vị trên biển còn phải đáp ứng các yêu cầu
dẫn đường trên biển, tìm kiếm, trục vớt tầu đắm, định vị lắp đặt các công trình
biển (giàn khoan, cầu cảng) [21].
- Trong giai đoạn khảo sát, thiết kế công trình biển thì nhiệm vụ của
trắc địa là cung cấp tài liệu địa hình đáy biển hoặc một phần trên đất liền và
một phần đáy biển ven bờ phục vụ cho công tác thiết kế công trình. Để đo vẽ
địa hình đáy biển, cần phải lập lưới khống chế cơ sở mặt bằng và độ cao bằng
các công nghệ truyền thống hoặc công nghệ GPS. Trong giai đoạn này công
tác định vị trên biển cần thiết cho công tác dẫn đường tầu đo sâu và định vị
các điểm đo sâu trên biển.
- Trong giai đoạn thi công xây dựng công trình thì nhiệm vụ của trắc
địa là tiến hành đo đạc, bố trí công trình để đảm bảo công trình được xây
dựng đúng với vị trí, độ cao, hình dạng và kích thước như đã thiết kế [21].
1.1.3. Yêu cầu độ chính xác của công tác định vị trên biển
Yêu cầu độ chính xác định vị trên biển phụ thuộc vào dạng các công
trình biển và giai đoạn khảo sát thiết kế và thi công khai thác sử dụng công
trình biển.
Để phục vụ cho công tác khảo sát địa vật lý trên biển, thì công tác định
vị tầu chỉ cần độ chính xác cỡ 2500 m, trong công tác khảo sát thăm dò yêu
11
cầu độ chính xác tới 100 ÷ 150 m, và khi khảo sát chi tiết lại cần tới độ chính
xác 20 ÷ 50 m. Có những dạng công tác yêu cầu định vị điểm với độ chính
xác khá cao, như khi định vị giàn khoan sai số định vị không được vượt quá 3
m. Đặc biệt là vùng nước sâu yêu cầu về vị trí điểm ở đáy biển so với vị trí
điểm trên mặt biển rất cao. Để phục vụ cho công tác lắp đặt các đường ống
dẫn dầu, khí hoặc cáp (cáp điện, cáp quang...) dưới biển cần định vị với sai số
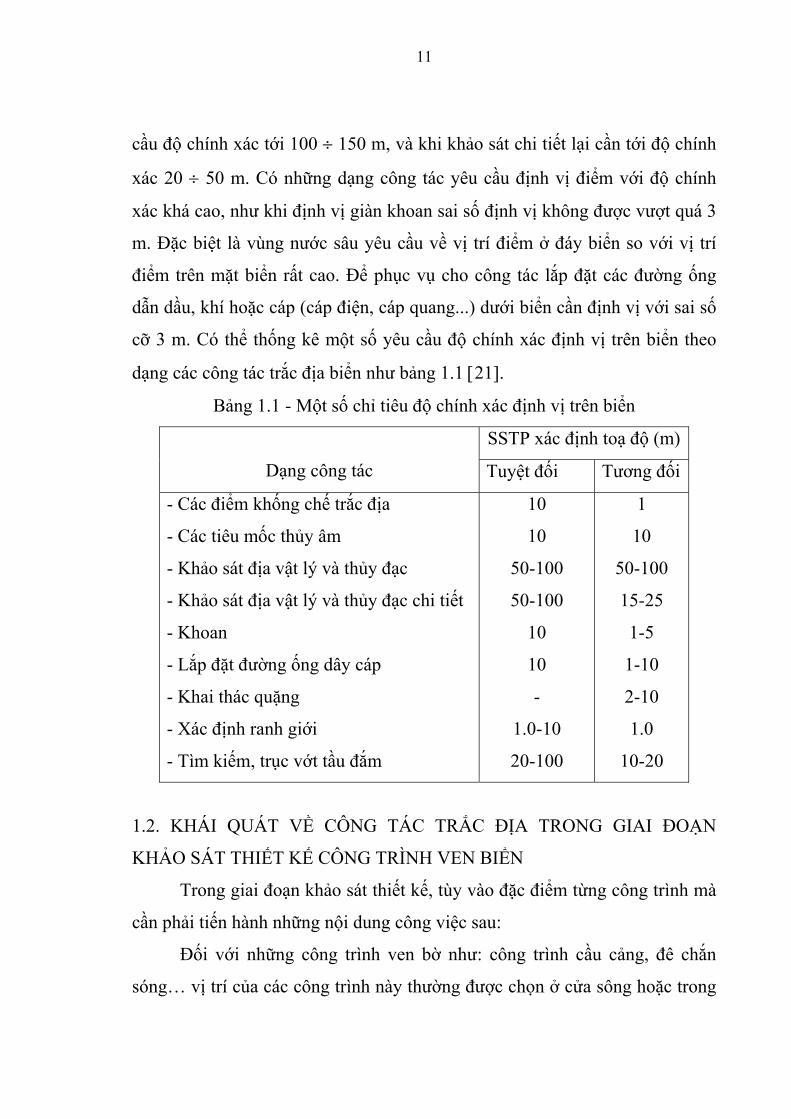
cỡ 3 m. Có thể thống kê một số yêu cầu độ chính xác định vị trên biển theo
dạng các công tác trắc địa biển như bảng 1.1 [21].
Bảng 1.1 - Một số chỉ tiêu độ chính xác định vị trên biển
SSTP xác định toạ độ (m)
Dạng công tác Tuyệt đối Tương đối
- Các điểm khống chế trắc địa
- Các tiêu mốc thủy âm
- Khảo sát địa vật lý và thủy đạc
- Khảo sát địa vật lý và thủy đạc chi tiết
- Khoan
- Lắp đặt đường ống dây cáp
- Khai thác quặng
- Xác định ranh giới
- Tìm kiếm, trục vớt tầu đắm
10
10
50-100
50-100
10
10
-
1.0-10
20-100
1
10
50-100
15-25
1-5
1-10
2-10
1.0
10-20
1.2. KHÁI QUÁT VỀ CÔNG TÁC TRẮC ĐỊA TRONG GIAI ĐOẠN
KHẢO SÁT THIẾT KẾ CÔNG TRÌNH VEN BIỂN
Trong giai đoạn khảo sát thiết kế, tùy vào đặc điểm từng công trình mà
cần phải tiến hành những nội dung công việc sau:
Đối với những công trình ven bờ như: công trình cầu cảng, đê chắn
sóng… vị trí của các công trình này thường được chọn ở cửa sông hoặc trong
12
vịnh. Vì vậy để quy hoạch tổng thể, bố trí mặt bằng và thiết kế kỹ thuật công
trình cảng cần có bản đồ địa hình cả ở trên đất liền và một phần dưới nước với
các tỷ lệ khác nhau.
Trong giai đoạn quy hoạch, chọn vị trí các công trình cần có bản đồ tỷ
lệ 1:5000 ÷ 1:1000 [30]. Các công trình cảng thường chiếm diện tích không
lớn, do đó bản đồ địa hình trên phần đất liền cũng như dưới nước đều được đo
vẽ trực tiếp trên thực địa.
Với bản đồ địa hình phần trên đất liền, trên khu vực cần đo vẽ các bản
đồ tỷ lệ 1:2000; 1:1000; 1:500 thì cứ 5 ÷ 15 km2 cần có một điểm khống chế
mặt bằng và 5 ÷ 7 km2 cần có một điểm khống chế độ cao. Nếu trên các khu
vực hẹp có dạng kéo dài thì cứ 5 km2 cần có 1 điểm khống chế mặt bằng. Nếu
trên khu vực đo vẽ chưa có đủ mật độ điểm khống chế nhà nước quy định thì
cần phải tiến hành tăng dày mạng lưới. Đối với khu vực xây dựng sau khi
chêm dày phải đạt 4 điểm/km2, với khu vực chưa xây dựng cần đạt 1
điểm/km2. Công tác đo đạc khảo sát cũng như tất cả các công tác khảo sát các
công trình trên đất liền với trình tự và nội dung như trong quy phạm.
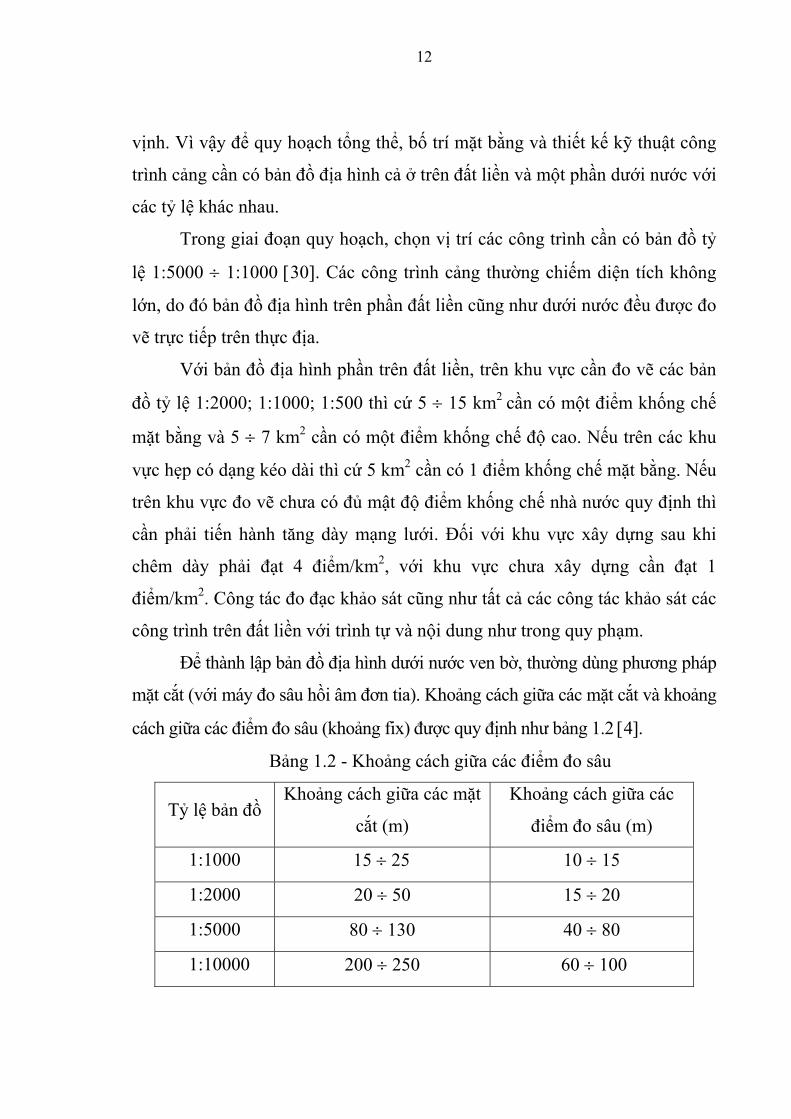
Để thành lập bản đồ địa hình dưới nước ven bờ, thường dùng phương pháp
mặt cắt (với máy đo sâu hồi âm đơn tia). Khoảng cách giữa các mặt cắt và khoảng
cách giữa các điểm đo sâu (khoảng fix) được quy định như bảng 1.2 [4].
Bảng 1.2 - Khoảng cách giữa các điểm đo sâu
Tỷ lệ bản đồ Khoảng cách giữa các mặt
cắt (m)
Khoảng cách giữa các
điểm đo sâu (m)
1:1000 15 ÷ 25 10 ÷ 15
1:2000 20 ÷ 50 15 ÷ 20
1:5000 80 ÷ 130 40 ÷ 80
1:10000 200 ÷ 250 60 ÷ 100
13
Để đo vẽ mặt cắt thường dùng các phương pháp đo sâu sau:
Đối với những vùng nước sâu không quá 5 m thường dùng sào đo sâu
với độ chính xác đo cỡ 0,1 m. Sào đo có thể làm bằng tre, gỗ, chiều dài sào
không quá 6 m, đường kính sào không quá 6 cm, có đế sắt ở một đầu.
Đối với những vùng nước có độ sâu từ 2 ÷ 20 m có thể dùng dọi đo sâu.
Dọi được đúc bằng gang hay chì, có dạng tháp hoặc dạng quả cầu, dây dọi có
thể là dây xích hoặc dây cáp.
Với những vùng nước sâu hơn 5 m có thể dùng phương pháp hiện đại
là phương pháp dùng máy đo sâu hồi âm.
Để xác định được vị trí mặt bằng của điểm đo sâu có thể dùng phương
pháp giao hội góc, giao hội cạnh từ các điểm khống chế trên bờ, tọa độ cực
bằng máy toàn đạc điện tử có khả năng đo xa, các phương pháp định vị vô
tuyến, định vị bằng GPS.
Các công trình khai thác tài nguyên thiên nhiên, năng lượng biển và
không gian biển gồm công trình khai thác dầu khí, công trình lắp đặt đường
ống, cáp điện ở đáy biển… Công tác trắc địa khi xây dựng các công trình này
được thực hiện cả trên mặt nước và cả dưới nước. Công việc trắc địa dưới
nước phải kết hợp với máy lặn, tầu lặn và phải sử dụng các thiết bị đặc biệt
chuyên dụng chủ yếu là các hệ thống đo bằng âm thanh, máy thu hình, máy
ảnh… Trên mặt nước, tại các khu vực có giàn khoan, lỗ khoan hay điểm đổ
bộ cần đo vẽ bản đồ địa hình với tỷ lệ 1:1000 ÷ 1:2000. Ngoài ra còn phải đo
thêm tốc độ của dòng chảy, hướng dòng chảy tại các tầng trên, tầng giữa và
tầng đáy của nước.
Với các công trình lắp đặt đường cáp quang, đường ống hay công trình
ngầm xuyên biển phải đo sâu dọc tuyến với tỷ lệ đo vẽ bản đồ từ 1:50000 ÷
1:20000. Đối với tuyến ven biển thì tỷ lệ đo vẽ lớn hơn, tuyến từ lục địa ra
đảo hay nối giữa các đảo thì tỷ lệ đo vẽ nhỏ hơn và thường đo sâu theo ba
14
tuyến với khoảng cách giữa các tuyến là 10 cm trên bản đồ, tuyến giữa trùng
với đường ống hoặc đường dây cáp điện. Tại những nơi có địa hình phức tạp
có thể tăng tuyến đo lên thành năm tuyến hoặc nhiều hơn. Sai số trung
phương định vị điểm đo sâu không được lớn hơn 3 mm trên bản đồ, mật độ
điểm đo sâu mỗi tuyến là 0,5 cm trên bản đồ.
Đo đạc trên biển là dạng công tác phụ thuộc rất nhiều vào điều kiện khí
hậu, thời tiết do vậy công tác thu thập tài liệu hải văn rất cần thiết cho công
tác khảo sát thiết kế của khu vực đo. Để có được tài liệu chính xác người làm
công tác trắc địa phải tiến hành quan trắc độ cao, chu kỳ sóng, hướng sóng, sự
lên xuống của thủy triều…
1.3. TÌNH HÌNH NGHIÊN CỨU TRONG VÀ NGOÀI NƯỚC VỀ ỨNG
DỤNG CÔNG NGHỆ GPS VÀ MÁY ĐO SÂU HỒI ÂM TRONG KHẢO
SÁT THIẾT KẾ CÁC CÔNG TRÌNH VEN BIỂN
Liên quan đến lĩnh vực nghiên cứu trong phạm vi của đề tài đã có nhiều
tài liệu trong và ngoài nước đề cập đến, tuy nhiên ở mỗi thời điểm thì mức độ
nghiên cứu, ứng dụng công nghệ này có sự khác nhau về nội dung, mục đích
nghiên cứu và cách tiếp cận, bởi công nghệ ngày một đổi mới, không ngừng
được nâng cao về chất lượng, độ chính xác, khả năng ứng dụng những thành
tựu tiên tiến nhất của khoa học kỹ thuật.
1.3.1. Các công trình nghiên cứu ngoài nước
Khi đo đạc trên biển để xác định vị trí của tàu đo ở thời điểm tức thời
có thể ứng dụng công nghệ định vị DGPS, Gc-GPS [34], [44]. Về lĩnh vực
định vị, công nghệ GPS đã đem đến bước đột phá mới cho công tác đo đạc
trên biển cả về kinh tế, kỹ thuật và độ chính xác.
Công nghệ đo sâu bắt đầu từ cách đây hơn 200 năm, khi con người biết
khai thác và xây dựng các công trình lớn trên sông nước và biển cả. Từ việc
phải đo đạc thủ công bằng dọi đo sâu (từ năm 1837 [1]), thước dây rồi ứng
15
dụng các thiết bị thủy âm, máy đo sâu đơn tia, đa tia. Có thể nói công nghệ đo
sâu cũng rất phát triển, ngày càng hoàn thiện cả về kỹ thuật công nghệ, độ
chính xác và tính hiệu quả.
Trong [32] giới thiệu chi tiết về công nghệ định vị hiệu chỉnh toàn cầu
Gc-GPS (Globally corrected GPS) như: Các nguồn sai số của hệ thống định
vị GPS, các nguyên nhân gây mất tín hiệu vệ tinh, cách cài đặt hệ thống, cấu
hình hoạt động, chế độ hoạt động …, hay trong [34] giới thiệu về khả năng
thích ứng cùng độ chính xác của công nghệ Gc-GPS khi thực nghiệm đo đạc
ở Bắc Băng Dương khi nhiệt độ xuống tới -50°C. Các tài liệu đã giới thiệu
chi tiết về công nghệ và các ứng dụng thực tiễn của công nghệ GPS trong
các lĩnh vực của đời sống xã hội nói chung và trong lĩnh vực đo đạc, xác
định vị trí nói riêng.
Trong [44] giới thiệu về công nghệ và các thiết bị xác định độ sâu
bao gồm độ chính xác, tầm hoạt động và khả năng thích ứng với các môi
trường đo đạc của từng vùng nước khác nhau: Trên sông, biển hay vùng
đầm lầy.
Trong các tài liệu [33], [38], [39], [42] và [43] giới thiệu chi tiết về các loại
máy đo sâu hồi âm đa tia bao gồm đặc tính kỹ thuật, các tính năng của máy, độ
sâu tối đa và các thiết bị đi kèm trong quá trình đo sâu trên biển.
1.3.2. Các công trình nghiên cứu trong nước
Nghiên cứu về vấn đề đo vẽ bản đồ địa hình đáy biển ở nước ta đã có
nhiều công trình nghiên cứu [1], [4], [5], [20] ...; giáo trình đã và đang được
giảng dạy tại một số trường đại học: [3], [10], [13], [19], [21], [23] ... Đọc và
tham khảo các tài liệu này chúng tôi có một số nhận xét sau đây:
1. Tài liệu báo cáo (1997) [20], trong nội dung chưa cập nhật được khả
năng ứng dụng của các thiết bị, công nghệ đo đạc trên biển hiện đại và tiên
tiến đang được ứng dụng rộng rãi trên thế giới ở thời điểm hiện nay. Tài liệu
16
này đã giới thiệu về công tác chuẩn bị, phương án kỹ thuật, cách thức tiến
hành nội nghiệp, ngoại nghiệp cho việc đo đạc trên biển phối hợp giữa
phương pháp truyền thống và hiện đại (công nghệ tại thời điểm năm 1995) để
thu thập được số liệu độ sâu phục vụ cho việc thành lập bản đồ biển. Tuy
nhiên bản đồ được thành lập chủ yếu ở tỷ lệ trung bình (10.000 ÷ 25.000)[3].
2. Trong một số tài liệu mới đây đã trình bày các kết quả nghiên cứu
về trắc địa biển nhưng lại tập trung vào một số vấn đề chuyên sâu: nghiên
cứu về thiết bị đo đạc trên biển [1], hoặc kết quả nghiên cứu cho từng thiết
bị, công nghệ cụ thể [5], [12], [15], còn vấn đề thành lập bản đồ địa hình đáy
biển tỷ lệ lớn phục vụ khảo sát thiết kế các công trình ven biển chưa được đề
cập một cách chi tiết về các nội dung tỷ lệ thành lập, quy trình đo đạc và xử
lý số liệu.
3. Các nghiên cứu mới đây [5], [12], [15] đã nêu được nguyên lý và khả
năng ứng dụng của một số công nghệ mới trong việc đo vẽ và thành lập bản
đồ địa hình đáy biển, tuy nhiên chưa có sự kết nối công nghệ, tích hợp một
cách đồng bộ để đưa ra qui trình hoàn thiện hơn trong việc đo vẽ thành lập
bản đồ địa hình đáy biển.
4. Hiện nay trên thế giới thiết bị và công nghệ đo đạc trên biển đang
được cải tiến và hoàn thiện như công nghệ GPS hiệu chỉnh toàn cầu (Gc-
GPS), công nghệ đo sâu hồi âm đa tia [1], [18], [22], [24]. Các công nghệ đo
đạc tiên tiến này cho phép thay đổi quy trình đo đạc trên biển, đem lại hiệu
quả công việc và nâng cao độ chính xác thành lập bản đồ địa hình đáy biển tỷ
lệ lớn. Những vấn đề ghép nối các thiết bị và phương pháp kiểm định chưa
được cập nhật một cách hoàn chỉnh trong lĩnh vực đo vẽ bản đồ địa hình đáy
biển tỷ lệ lớn ở Việt Nam.
5. Trong nhiệm vụ khảo sát địa hình đáy biển phục vụ thi công các
công trình ven biển còn bao hàm nội dung của công tác trắc địa phục vụ thăm
17
dò địa chất, địa vật lý, lấy mẫu đất, định vị các giàn khoan thăm dò… Các nội
dung này hiện nay mới chỉ có những thông báo ngắn gọn [16], chưa được
nghiên cứu và hoàn thiện về quy trình và phương pháp ghép nối nhằm nâng
cao hiệu quả trong thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn.
1.3.3. Những vấn đề còn tồn tại và định hướng nghiên cứu của luận án
Các tài liệu ở trong nước và nước ngoài mới chỉ đề cập đến nguyên lý,
độ chính xác của thiết bị, tầm hoạt động … mà chưa có tài liệu nào đi sâu vào
phân tích, kết nối các thiết bị tiên tiến với nhau và phương pháp kiểm định hệ
thống đồng bộ để đảm bảo độ chính xác đo vẽ bản đồ địa hình đáy biển ven
bờ tỷ lệ lớn.
Chưa có các qui định về đo vẽ thành lập bản đồ địa hình đáy biển ven
bờ tỷ lệ lớn khi sử dụng công nghệ đo đạc tiên tiến, các giải pháp nhằm nâng
cao hiệu quả của công tác đo vẽ thành lập bản đồ địa hình đáy biển ven bờ tỷ
lệ lớn.
Do đó định hướng nghiên cứu của luận án là xây dựng các chỉ tiêu kỹ
thuật hợp lý, phù hợp với đặc điểm thành lập bản đồ đồ địa hình đáy biển ven
bờ; nghiên cứu ghép nối và kiểm định hệ thống GPS và máy đo sâu hồi âm
theo quy trình kỹ thuật nhằm nâng cao hiệu quả công tác đo vẽ thành lập bản
đồ địa hình đáy biển ven bờ tỷ lệ lớn phục vụ thiết kế các công trình ven biển
ở Việt Nam.
18
Chương 2
YÊU CẦU KỸ THUẬT THÀNH LẬP BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN
VEN BỜ TỶ LỆ LỚN
2.1. NỘI DUNG CÔNG TÁC THÀNH LẬP BĐĐHĐB VEN BỜ TỶ LỆ LỚN
Khác với công tác đo đạc để thành lập bản đồ trên đất liền, đo đạc để
thành lập bản đồ địa hình đáy biển có đặc thù và mức độ khó khăn lớn hơn.
Trong đó phải kể đến môi trường tác nghiệp, công tác đo đạc chủ yếu thực
hiện trên tàu, thuyền luôn chịu sự tác động của sóng, gió ảnh hưởng trực tiếp
đến kết quả đo. Trên đất liền có thể nhận thức trực quan được mức độ phức
tạp của địa hình, dáng đất còn khi đo đạc trên biển không nhận thức được trực
tiếp bằng các giác quan, hướng đo được thiết kế trước và phải có thiết bị dẫn
đường để thu nhận dữ liệu theo luận chứng kỹ thuật. Trên đất liền các điểm
chi tiết được xác định đồng thời cả về mặt bằng và độ cao, trên biển để xác
định được mặt bằng và độ cao cần ghép nối tối thiểu 2 thiết bị riêng biệt, số
liệu đo được lại phải hiệu chỉnh, đồng bộ thời gian, loại bỏ các sai số thô,
nhiễu ... Số liệu mặt bằng và độ sâu được xử lý bằng các phần mềm chuyên
dụng để cuối cùng đưa ra sản phẩm đáng tin cậy nhất, làm dữ liệu đầu vào để
thành lập BĐĐHĐB. Do vậy cần nghiên cứu các phương pháp xác định mặt
bằng và độ cao để đảm bảo tính kinh tế, phù hợp yêu cầu nhiệm vụ và tiêu
chuẩn về độ chính xác khi thành lập BĐĐHĐB.
2.1.1. Các phương pháp xác định vị trí mặt bằng điểm đo trên biển
Hiện nay trên thế giới để xác định vị trí mặt bằng các điểm đo trên biển
trong việc đo vẽ BĐĐHĐB ven bờ có thể sử dụng các phương pháp sau:
+ Phương pháp quang học
+ Phương pháp định vị vô tuyến (kỹ thuật radio)
+ Phương pháp định vị thủy âm
+ Phương pháp định vị vệ tinh.
19
Trong đó phương pháp định vị vệ tinh được ứng dụng rất phổ biến. Hiện
nay có rất nhiều Quốc gia phát triển về lĩnh vực định vị vệ tinh như:
1. Hệ thống định vị toàn cầu GPS (Global positioning system) do Mỹ sản xuất.
2. Galileo - Hệ thống định vị toàn cầu do EU và các quốc gia đối tác khác
phát triển.
3. Beidou (Bắc đẩu) - Hệ thống riêng của Trung Quốc phát triển, phủ ở
châu Á và tây Thái Bình Dương.
4. GLONASS - Hệ thống định vị toàn cầu của Nga.
5. IRNSS - Hệ thống định vị khu vực của Ấn Độ, bao phủ Ấn Độ và bắc
Ấn Độ Dương.
6. QZSS - Hệ thống định vị khu vực của Nhật Bản, bao phủ châu Á và
châu Đại Dương.
Về nguyên lý hoạt động cơ bản các hệ thống có sự tương đồng, đều giải
bài toán định vị thông qua các vệ tinh trên nguyên tắc giao hội khoảng cách
không gian. Tuy nhiên mục đích và phạm vi hoạt động của các hệ thống có
một số khác biệt.
Ở nước ta để xác định vị trí mặt bằng các điểm đo trên biển trong việc đo vẽ
BĐĐHĐB ven bờ hiện nay thường sử dụng phương pháp DGPS và Gc-GPS.
2.1.2. Các phương pháp xác định độ sâu trong đo vẽ BĐĐHĐB bằng máy
đo sâu hồi âm
Nguyên lý hoạt động của máy đo sâu hồi âm: Máy đo sâu hồi âm dựa
trên cơ sở xác định thời gian lan truyền sóng âm thanh trong môi trường nước
và vận tốc lan truyền sóng âm để xác định khoảng cách từ nguồn phát sóng
âm đến đối tượng phản xạ sóng âm.
Để xác định độ sâu lớp nước, cần phải xác định khoảng thời gian tín hiệu
âm thanh lan truyền trong nước từ thời điểm phát đến thời điểm nhận tín hiệu âm
thanh phản hồi, khi đó độ sâu Z được tính theo công thức [5]:
20
tVZ .21
= (2.1)
Trong đó: V là vận tốc âm thanh thực tế trong môi trường nước,
t là khoảng thời gian tín hiệu âm thanh lan truyền trong nước
từ thời điểm phát đến thời điểm nhận tín hiệu âm thanh phản hồi.
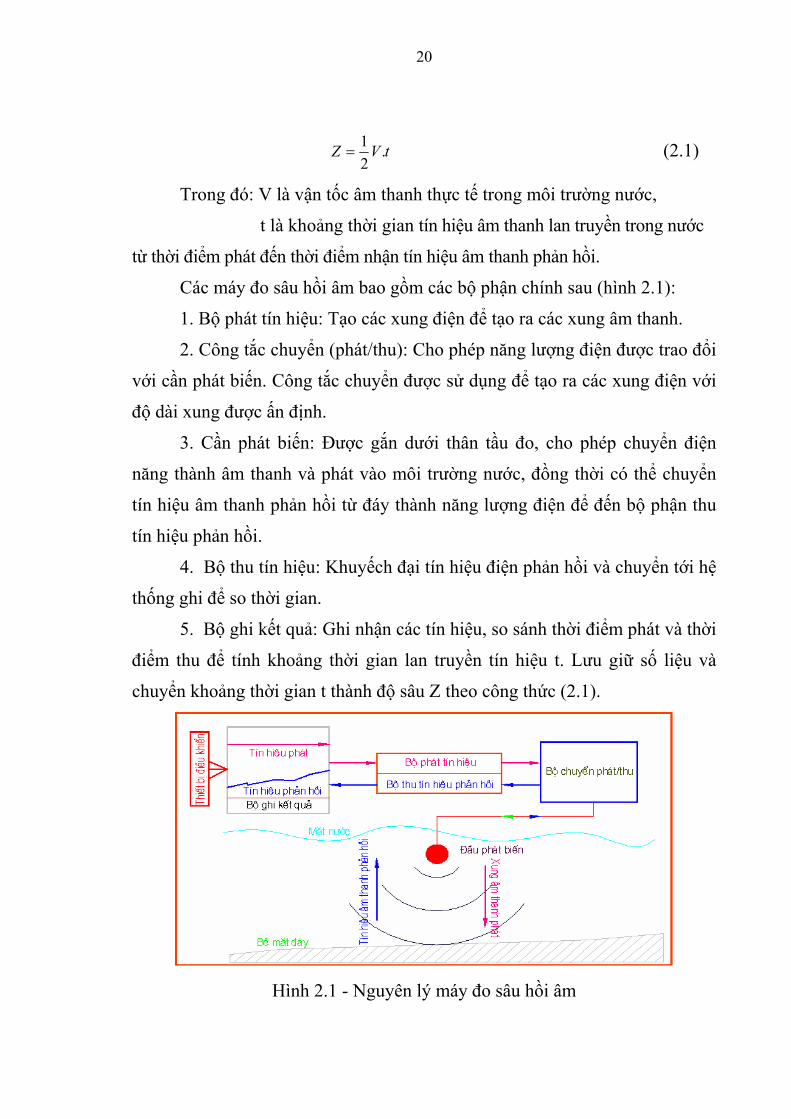
Các máy đo sâu hồi âm bao gồm các bộ phận chính sau (hình 2.1):
1. Bộ phát tín hiệu: Tạo các xung điện để tạo ra các xung âm thanh.
2. Công tắc chuyển (phát/thu): Cho phép năng lượng điện được trao đổi
với cần phát biến. Công tắc chuyển được sử dụng để tạo ra các xung điện với
độ dài xung được ấn định.
3. Cần phát biến: Được gắn dưới thân tầu đo, cho phép chuyển điện
năng thành âm thanh và phát vào môi trường nước, đồng thời có thể chuyển
tín hiệu âm thanh phản hồi từ đáy thành năng lượng điện để đến bộ phận thu
tín hiệu phản hồi.
4. Bộ thu tín hiệu: Khuyếch đại tín hiệu điện phản hồi và chuyển tới hệ
thống ghi để so thời gian.
5. Bộ ghi kết quả: Ghi nhận các tín hiệu, so sánh thời điểm phát và thời
điểm thu để tính khoảng thời gian lan truyền tín hiệu t. Lưu giữ số liệu và
chuyển khoảng thời gian t thành độ sâu Z theo công thức (2.1).
Hình 2.1 - Nguyên lý máy đo sâu hồi âm
21
Trong bộ phát tín hiệu, sử dụng đồng hồ thạch anh để tạo ra tần số
trong khoảng 1 đến 10 MHz, từ tần số này sẽ tạo ra các tần số thấp hơn để
được tần số sử dụng của đầu phát biến. Đồng hồ thạch anh còn được dùng để
xác định khoảng thời gian từ thời điểm phát xung âm thanh đến thời điểm
nhận tín hiệu âm phản hồi phục vụ cho xác định độ sâu. Các máy đo sâu hiện
đại thường sử dụng 2 tần số phát như sau:
- Tần số thấp: Sử dụng cho đo độ sâu lớn vì ở tần số thấp sự tổn thất âm
năng trong nước ít hơn, nhưng kích thước đầu phát biến lại lớn hơn.
- Tần số cao: Kích thước đầu phát biến được rút nhỏ, song độ sâu đo lại
bị hạn chế do hệ số hấp thụ âm lớn hơn (tổn thất âm năng lớn).
Trong máy đo sâu hồi âm, thông thường người ta phát xung âm thanh
có độ dài trong khoảng 0,1 đến 50 ms (mili giây). Ở lớp nước nông, thường
sử dụng các xung đơn, ngắn cỡ 0,2 ms và nhận tín hiệu phản hồi trước khi
phát xung kế tiếp. Đối với lớp nước sâu, thường sử dụng nhiều xung có độ dài
thay đổi trong khoảng 1 ms đến 40 ms một cách đều đặn. Sự khác nhau của
độ dài xung giúp khắc phục được hiện tượng mất tín hiệu do sự hấp thụ.
Bộ thu tín hiệu phản hồi có nhiệm vụ khuyếch đại tín hiệu phản hồi và
chuyển đến hệ thống ghi nhận. Bộ thu nhận được trang bị bộ hỗ trợ biến đổi
thời gian ngắn (TVG- A time varying gain) được sử dụng để giảm tác động
vào bộ thu ngay sau lúc phát tín hiệu theo nguyên tắc lọc (loại bỏ) sự dội âm
từ bên ngoài. Dải tần thu nhận cũng phải đủ rộng để có thể chấp nhận hiện
tượng dịch tần Doppler nếu như cần phát biến không thẳng đứng. Cần phát
biến được lắp đặt dưới thân tàu và phải ngập trong nước. Xung điện từ bộ
phát tạo ra sự rung động đĩa phát âm thanh (diaphragm) của cần phát biến.
Đĩa phát âm thanh rung động trong môi trường nước sẽ tạo ra sóng âm với tần
số phụ thuộc vào tần số giao động của đĩa phát. Quá trình ngược lại sẽ xẩy ra
khi đầu phát biến nhận được tín hiệu âm thanh phản hồi, khi đó đĩa phát âm
thanh bị rung động lại tạo ra dòng điện và được chuyển đến bộ thu.
22
Cần phát biến có thể sử dụng một số nguyên tắc tạo sóng âm khác
nhau. Có 3 loại cần phát biến đang được sử dụng là:
- Đầu phát biến sử dụng vật liệu từ giảo (magnetostrictive material).
- Đầu phát biến áp điện (piezoelectric).
- Đầu phát biến điện giảo (electrostrictive).
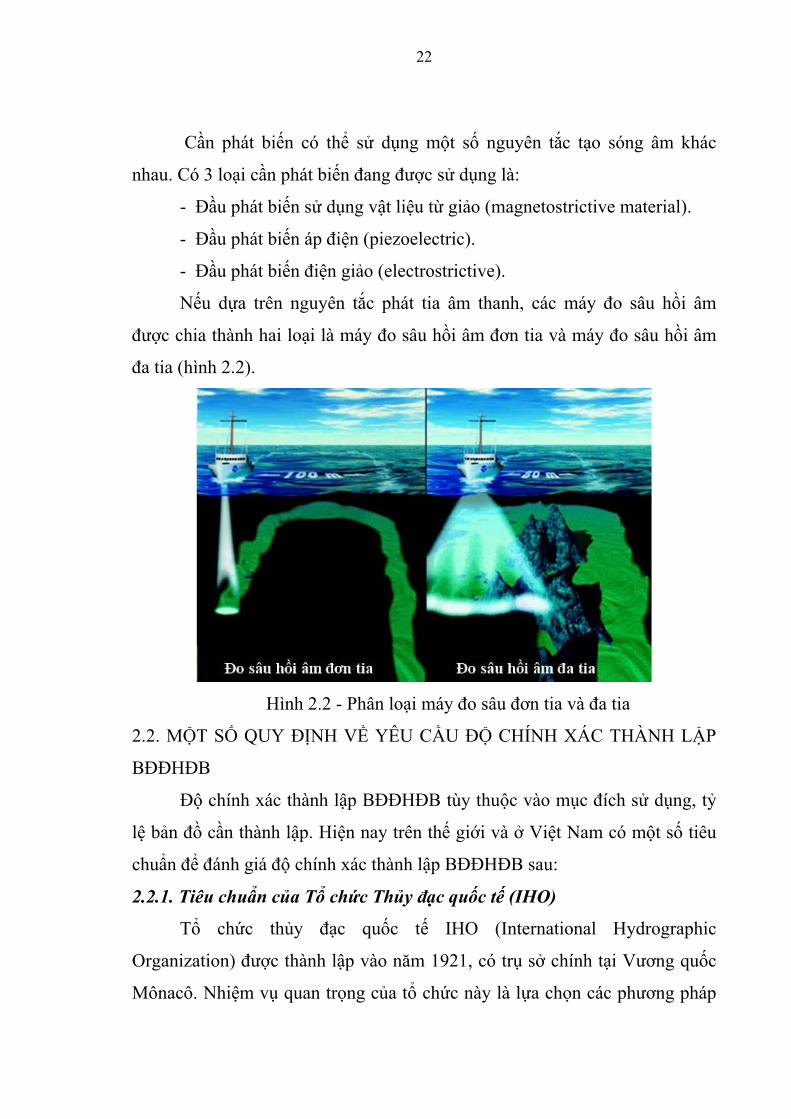
Nếu dựa trên nguyên tắc phát tia âm thanh, các máy đo sâu hồi âm
được chia thành hai loại là máy đo sâu hồi âm đơn tia và máy đo sâu hồi âm
đa tia (hình 2.2).
Hình 2.2 - Phân loại máy đo sâu đơn tia và đa tia
2.2. MỘT SỐ QUY ĐỊNH VỀ YÊU CẦU ĐỘ CHÍNH XÁC THÀNH LẬP
BĐĐHĐB
Độ chính xác thành lập BĐĐHĐB tùy thuộc vào mục đích sử dụng, tỷ
lệ bản đồ cần thành lập. Hiện nay trên thế giới và ở Việt Nam có một số tiêu
chuẩn để đánh giá độ chính xác thành lập BĐĐHĐB sau:
2.2.1. Tiêu chuẩn của Tổ chức Thủy đạc quốc tế (IHO)
Tổ chức thủy đạc quốc tế IHO (International Hydrographic
Organization) được thành lập vào năm 1921, có trụ sở chính tại Vương quốc
Mônacô. Nhiệm vụ quan trọng của tổ chức này là lựa chọn các phương pháp
23
tin cậy và hiệu quả để thực hiện công tác đo vẽ địa hình đáy biển và cải tiến
về khoa học trong lĩnh vực khảo sát biển và đại dương.
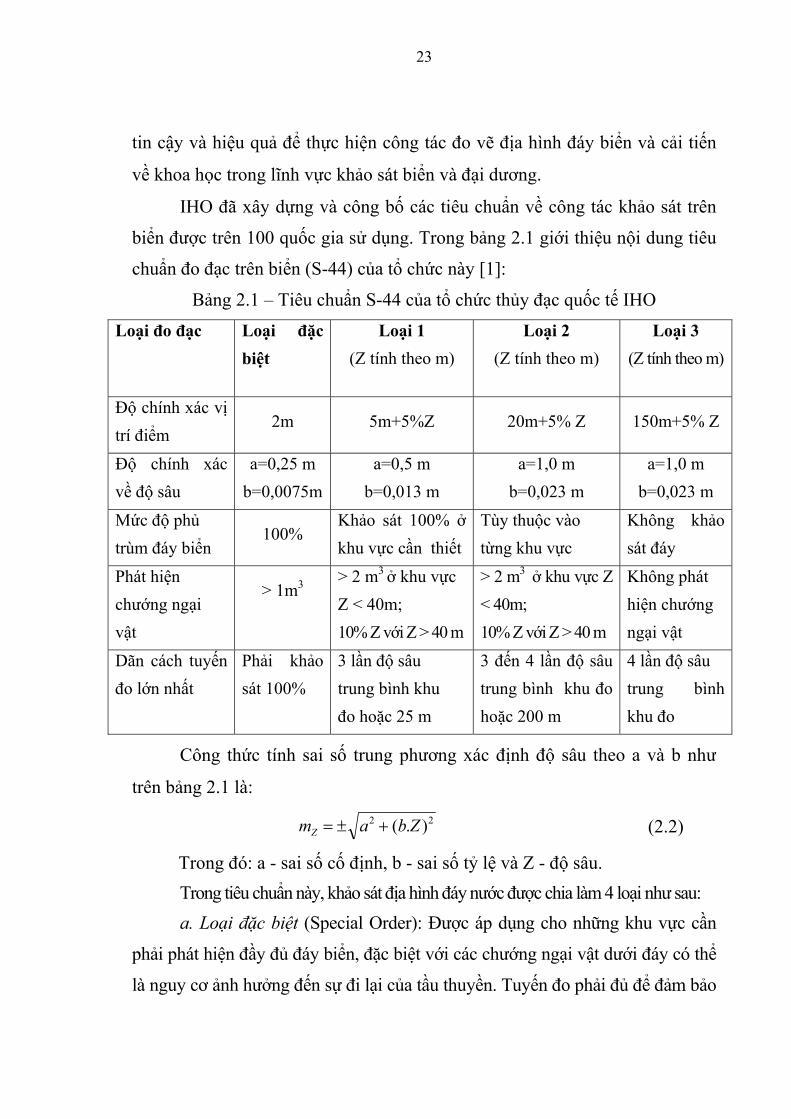
IHO đã xây dựng và công bố các tiêu chuẩn về công tác khảo sát trên
biển được trên 100 quốc gia sử dụng. Trong bảng 2.1 giới thiệu nội dung tiêu
chuẩn đo đạc trên biển (S-44) của tổ chức này [1]:
Bảng 2.1 – Tiêu chuẩn S-44 của tổ chức thủy đạc quốc tế IHO
Loại đo đạc Loại đặc biệt
Loại 1 (Z tính theo m)
Loại 2 (Z tính theo m)
Loại 3 (Z tính theo m)
Độ chính xác vị trí điểm
2m 5m+5%Z 20m+5% Z 150m+5% Z
Độ chính xác về độ sâu
a=0,25 m b=0,0075m
a=0,5 m b=0,013 m
a=1,0 m b=0,023 m
a=1,0 m b=0,023 m
Mức độ phủ trùm đáy biển
100% Khảo sát 100% ở khu vực cần thiết
Tùy thuộc vào từng khu vực
Không khảo sát đáy
Phát hiện chướng ngại vật
> 1m3
> 2 m3 ở khu vực
Z < 40m; 10% Z với Z > 40 m
> 2 m3 ở khu vực Z < 40m; 10% Z với Z > 40 m
Không phát hiện chướng ngại vật
Dãn cách tuyến đo lớn nhất
Phải khảo sát 100%
3 lần độ sâu trung bình khu đo hoặc 25 m
3 đến 4 lần độ sâu trung bình khu đo hoặc 200 m
4 lần độ sâu trung bình khu đo
Công thức tính sai số trung phương xác định độ sâu theo a và b như
trên bảng 2.1 là:
22 ).( ZbamZ +±= (2.2)
Trong đó: a - sai số cố định, b - sai số tỷ lệ và Z - độ sâu. Trong tiêu chuẩn này, khảo sát địa hình đáy nước được chia làm 4 loại như sau: a. Loại đặc biệt (Special Order): Được áp dụng cho những khu vực cần
phải phát hiện đầy đủ đáy biển, đặc biệt với các chướng ngại vật dưới đáy có thể
là nguy cơ ảnh hưởng đến sự đi lại của tầu thuyền. Tuyến đo phải đủ để đảm bảo
24
khi đo không bỏ sót địa vật. Phương tiện để khảo sát thường sử dụng máy đo sâu
hồi âm đa tia (MBES-Multibeam Echosounder), hệ thống máy đo sâu hồi âm
đơn tia với nhiều ăng ten (Sweep system) hoặc kết hợp máy đo sâu hồi âm đơn
tia với hệ thống máy quét biên (SSS-Side Scan Sonar) để đảm bảo đo được
100% đáy nước và xác định được các đối tượng dưới nước có kích thước từ 1 m
trở lên. Ở những khu vực có chướng ngại vật nhỏ và nguy hiểm phải sử dụng hệ
thống máy quét biên SSS kết hợp hệ thống đo sâu đa tia MBES.
b. Loại 1 (Order 1): Các khu bến cảng, luồng lạch vào cảng, các tuyến
đường trên biển, kênh đào trong đất liền, vùng bờ biển có lưu lượng tàu
thuyền qua lại cao hoặc những khu vực địa hình đáy nước ít có khả năng gây
nguy hiểm cho tầu thuyền (ví dụ chất đáy mềm hoặc cát). Loại 1 chỉ được
thực hiện ở những khu vực có độ sâu nhỏ hơn 100 m. Mặc dù việc khảo sát
không yêu cầu khắt khe như đối với loại đặc biệt nhưng đối với các khu vực
có bề mặt đáy nước có thể gây nguy hiểm đến sự di chuyển của tầu thuyền thì
cần phải đo toàn bộ 100% đáy nước và phải phát hiện được địa vật từ 2 m trở
lên với độ sâu nhỏ hơn 40 m hoặc 10% độ sâu với độ sâu lớn hơn 40 m bằng
thiết bị đo sâu.
c. Loại 2 (Order 2): Là những khu vực không liệt kê trong loại đặc biệt
và loại 1, có độ sâu nhỏ hơn 200 m nhưng không thuộc các dạng đo đặc biệt và
loại 1 hoặc nơi cần phải đo sâu để khẳng định không có nguy hiểm cho tầu
thuyền neo đậu hoặc làm việc. Đối với những khu vực có chướng ngại vật nguy
hiểm cho hoạt động tầu thuyền cần phải khảo sát phủ trùm 100% đáy nước.
d. Loại 3 (Order 3): Đối với những khu vực không thuộc các dạng nêu
trên và khu vực có độ sâu lớn hơn 200 m.
2.2.2. Quy phạm của quân đội Hoa Kỳ (USACE)
Theo Quy phạm của quân đội Hoa Kỳ (USACE- US Army Corps
Engineers) các dạng đo đạc, khảo sát địa hình dưới nước được chia thành hai
loại chính gồm có: Đo đạc, khảo sát địa hình đáy biển phục vụ công tác bảo
25
đảm an toàn hàng hải; đo sâu phục vụ nạo vét luồng lạch và xây dựng công
trình trên biển, đo đạc phục vụ các mục đích khác.
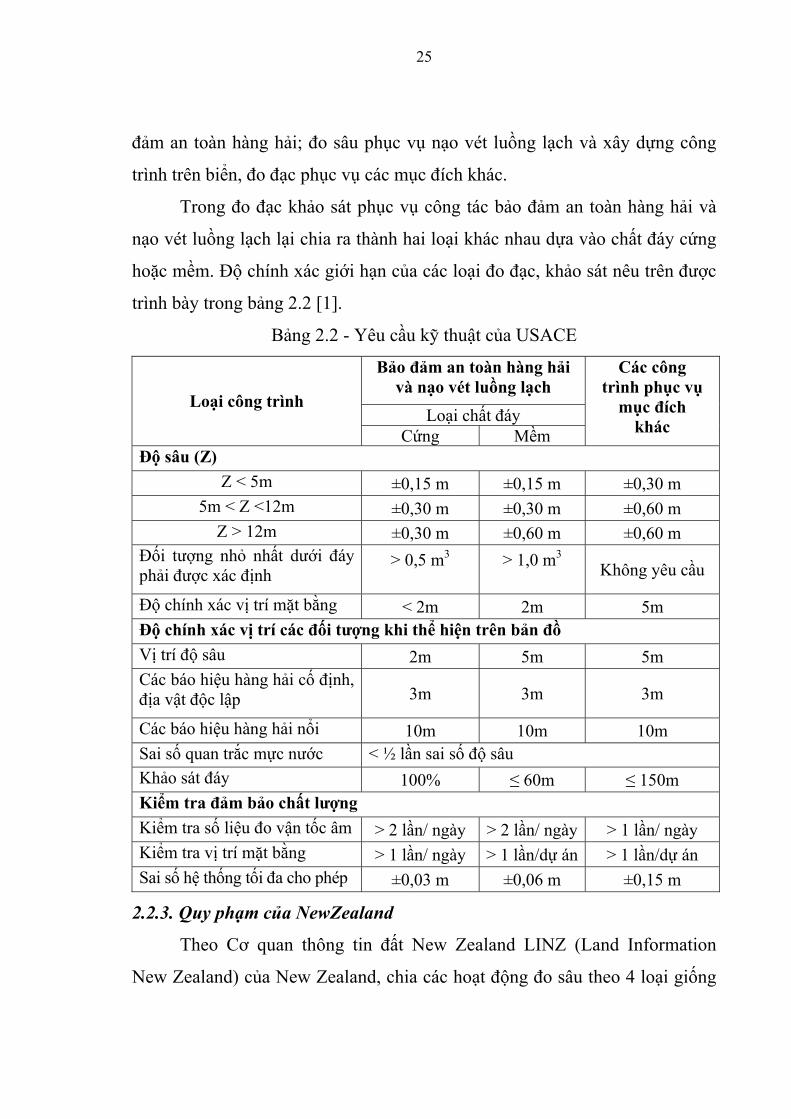
Trong đo đạc khảo sát phục vụ công tác bảo đảm an toàn hàng hải và
nạo vét luồng lạch lại chia ra thành hai loại khác nhau dựa vào chất đáy cứng
hoặc mềm. Độ chính xác giới hạn của các loại đo đạc, khảo sát nêu trên được
trình bày trong bảng 2.2 [1].
Bảng 2.2 - Yêu cầu kỹ thuật của USACE
Bảo đảm an toàn hàng hải và nạo vét luồng lạch
Loại chất đáy Loại công trình
Cứng Mềm
Các công trình phục vụ
mục đích khác
Độ sâu (Z) Z < 5m ±0,15 m ±0,15 m ±0,30 m
5m < Z <12m ±0,30 m ±0,30 m ±0,60 m Z > 12m ±0,30 m ±0,60 m ±0,60 m
Đối tượng nhỏ nhất dưới đáy phải được xác định
> 0,5 m3
> 1,0 m3
Không yêu cầu
Độ chính xác vị trí mặt bằng < 2m 2m 5m Độ chính xác vị trí các đối tượng khi thể hiện trên bản đồ Vị trí độ sâu 2m 5m 5m Các báo hiệu hàng hải cố định, địa vật độc lập 3m 3m 3m
Các báo hiệu hàng hải nổi 10m 10m 10m Sai số quan trắc mực nước < ½ lần sai số độ sâu Khảo sát đáy 100% ≤ 60m ≤ 150m Kiểm tra đảm bảo chất lượng Kiểm tra số liệu đo vận tốc âm > 2 lần/ ngày > 2 lần/ ngày > 1 lần/ ngày Kiểm tra vị trí mặt bằng > 1 lần/ ngày > 1 lần/dự án > 1 lần/dự án Sai số hệ thống tối đa cho phép ±0,03 m ±0,06 m ±0,15 m
2.2.3. Quy phạm của NewZealand
Theo Cơ quan thông tin đất New Zealand LINZ (Land Information
New Zealand) của New Zealand, chia các hoạt động đo sâu theo 4 loại giống
26
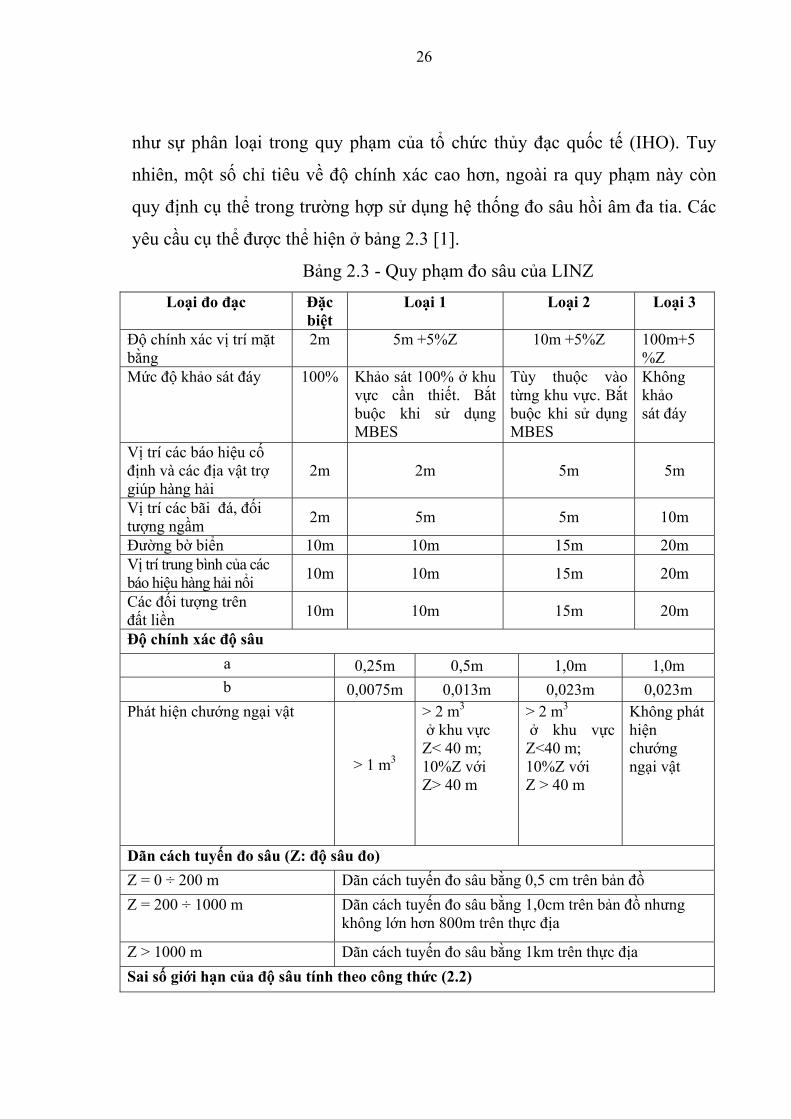
như sự phân loại trong quy phạm của tổ chức thủy đạc quốc tế (IHO). Tuy
nhiên, một số chỉ tiêu về độ chính xác cao hơn, ngoài ra quy phạm này còn
quy định cụ thể trong trường hợp sử dụng hệ thống đo sâu hồi âm đa tia. Các
yêu cầu cụ thể được thể hiện ở bảng 2.3 [1].
Bảng 2.3 - Quy phạm đo sâu của LINZ Loại đo đạc Đặc
biệt Loại 1 Loại 2 Loại 3
Độ chính xác vị trí mặt bằng
2m 5m +5%Z 10m +5%Z 100m+5%Z
Mức độ khảo sát đáy 100% Khảo sát 100% ở khu vực cần thiết. Bắt buộc khi sử dụng MBES
Tùy thuộc vào từng khu vực. Bắt buộc khi sử dụng MBES
Không khảo sát đáy
Vị trí các báo hiệu cố định và các địa vật trợ giúp hàng hải
2m 2m 5m 5m
Vị trí các bãi đá, đối tượng ngầm 2m 5m 5m 10m
Đường bờ biển 10m 10m 15m 20m Vị trí trung bình của các báo hiệu hàng hải nổi 10m 10m 15m 20m
Các đối tượng trên đất liền 10m 10m 15m 20m
Độ chính xác độ sâu a 0,25m 0,5m 1,0m 1,0m b 0,0075m 0,013m 0,023m 0,023m
Phát hiện chướng ngại vật
> 1 m3
> 2 m3
ở khu vực Z< 40 m; 10%Z với Z> 40 m
> 2 m3
ở khu vực Z<40 m; 10%Z với Z > 40 m
Không phát hiện chướng ngại vật
Dãn cách tuyến đo sâu (Z: độ sâu đo) Z = 0 ÷ 200 m Dãn cách tuyến đo sâu bằng 0,5 cm trên bản đồ Z = 200 ÷ 1000 m Dãn cách tuyến đo sâu bằng 1,0cm trên bản đồ nhưng
không lớn hơn 800m trên thực địa
Z > 1000 m Dãn cách tuyến đo sâu bằng 1km trên thực địa Sai số giới hạn của độ sâu tính theo công thức (2.2)
27
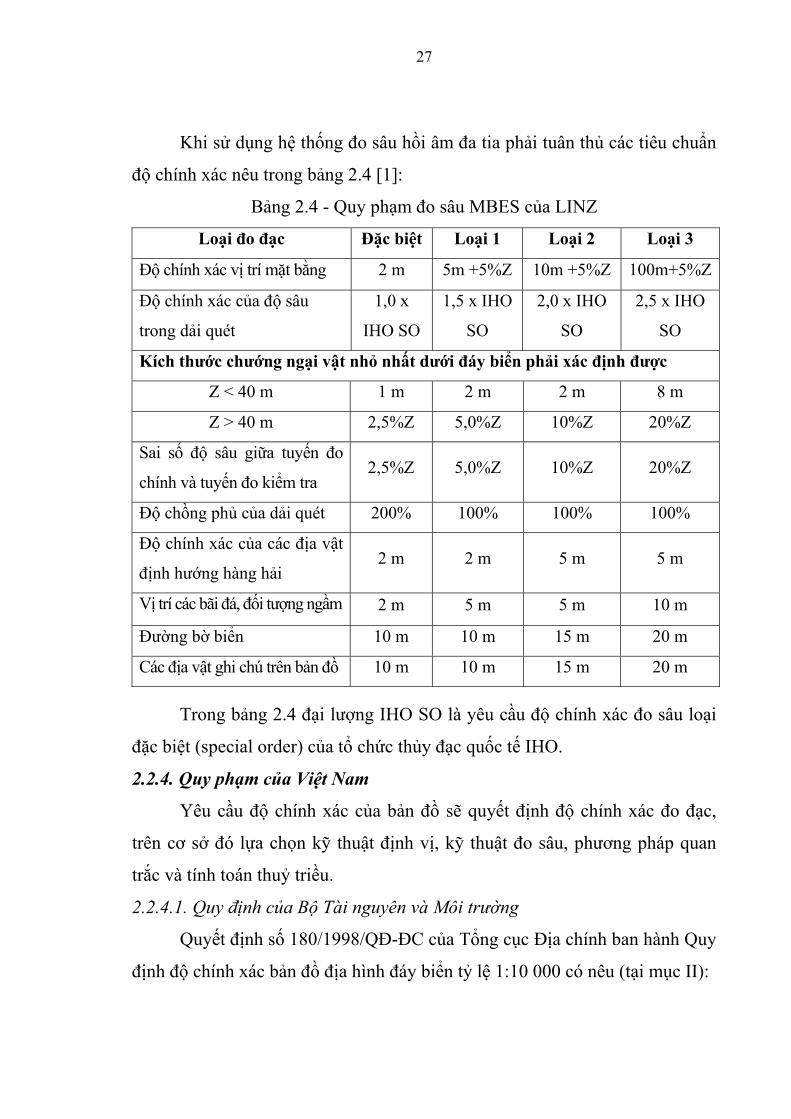
Khi sử dụng hệ thống đo sâu hồi âm đa tia phải tuân thủ các tiêu chuẩn
độ chính xác nêu trong bảng 2.4 [1]:
Bảng 2.4 - Quy phạm đo sâu MBES của LINZ
Loại đo đạc Đặc biệt Loại 1 Loại 2 Loại 3
Độ chính xác vị trí mặt bằng 2 m 5m +5%Z 10m +5%Z 100m+5%Z
Độ chính xác của độ sâu
trong dải quét
1,0 x
IHO SO
1,5 x IHO
SO
2,0 x IHO
SO
2,5 x IHO
SO
Kích thước chướng ngại vật nhỏ nhất dưới đáy biển phải xác định được
Z < 40 m 1 m 2 m 2 m 8 m
Z > 40 m 2,5%Z 5,0%Z 10%Z 20%Z
Sai số độ sâu giữa tuyến đo
chính và tuyến đo kiểm tra 2,5%Z 5,0%Z 10%Z 20%Z
Độ chồng phủ của dải quét 200% 100% 100% 100%
Độ chính xác của các địa vật
định hướng hàng hải 2 m 2 m 5 m 5 m
Vị trí các bãi đá, đối tượng ngầm 2 m 5 m 5 m 10 m
Đường bờ biển 10 m 10 m 15 m 20 m
Các địa vật ghi chú trên bản đồ 10 m 10 m 15 m 20 m
Trong bảng 2.4 đại lượng IHO SO là yêu cầu độ chính xác đo sâu loại
đặc biệt (special order) của tổ chức thủy đạc quốc tế IHO.
2.2.4. Quy phạm của Việt Nam
Yêu cầu độ chính xác của bản đồ sẽ quyết định độ chính xác đo đạc,
trên cơ sở đó lựa chọn kỹ thuật định vị, kỹ thuật đo sâu, phương pháp quan
trắc và tính toán thuỷ triều.
2.2.4.1. Quy định của Bộ Tài nguyên và Môi trường
Quyết định số 180/1998/QĐ-ĐC của Tổng cục Địa chính ban hành Quy
định độ chính xác bản đồ địa hình đáy biển tỷ lệ 1:10 000 có nêu (tại mục II):
28
1. Điểm chuẩn tọa độ trên bờ là điểm có độ chính xác tọa độ hạng IV nhà
nước trở lên.
2. Sai số trung phương độ cao của điểm nghiệm triều so với độ cao của điểm
thuỷ chuẩn Nhà nước gần nhất không được vượt quá 1/10 khoảng cao đều cơ
bản của đường đẳng sâu.
3. Sai số trung phương độ sâu của điểm ghi chú độ sâu so với độ cao của điểm
chuẩn độ cao không được vượt quá:
±0,30 m khi độ sâu đến 50 m
±0,45 m khi độ sâu từ 50 m đến 100 m
±0,70 m khi độ sâu trên 100 m.
4. Sai số trung phương độ sâu đường đẳng sâu so với độ cao của điểm chuẩn
độ cao không được vượt quá:
±0,40 m khi độ sâu đến 50 m
±0,60 m khi độ sâu từ 50 m đến 100m
±0,90 m khi độ sâu trên 100 m.
5. Sai số trung phương vị trí mặt phẳng của điểm ghi chú độ sâu so với điểm
cơ sở (điểm định vị trên bờ) không được vượt quá ±1,0 mm theo tỷ lệ bản đồ
(với tỷ lệ 1/10000 là ±10 m).
6. Sai số trung phương điểm địa vật cố định nổi trên mặt nước so với điểm
trắc địa gần nhất hoặc điểm chuẩn gần nhất không được vượt quá 0,7 mm, các
địa vật khác không quá 1,0 mm theo tỷ lệ bản đồ.
7. Số chênh độ sâu giữa đo kiểm tra và đo độ sâu trong vòng 2 mm tính theo
tỷ lệ bản đồ (bằng 20 m) không được vượt quá 1,5 lần giá trị sai số nêu ở trên
điểm 3 và điểm 4 của mục II.
8. Khoảng cách trung bình giữa các tuyến đo sâu không vượt quá 100 mét (tối đa
không quá 130 m). Sai lệch tuyến đo với tuyến thiết kế không vượt quá 30%
theo cùng một hướng. Trường hợp thiết bị đo không bảo đảm được quy định này
thì phải trình bày cụ thể trong luận chứng kinh tế - kỹ thuật.
29
- Khoảng cách đọc số liên tiếp trên một tuyến đo không lớn hơn 0,5 cm
trên bản đồ. Nếu địa hình phức tạp thì phải tăng thêm tuyến đo và đọc mật độ
điểm dày hơn đủ để nội suy đường đẳng sâu với độ chính xác theo yêu cầu
(mức độ tăng thêm được trình bầy cụ thể trong luận chứng kinh tế - kỹ thuật).
- Tổng chiều dài tuyến đo sâu kiểm tra không ít hơn 10% tổng chiều dài
tuyến đo, góc giao nhau giữa tuyến đo và tuyến kiểm tra không nhỏ hơn 60°
và lớn hơn 120°. Điểm đọc độ sâu giữa tuyến đo và tuyến kiểm tra tại chỗ cắt
nhau không lệch quá 2 mm tính theo tỷ lệ bản đồ theo hướng vuông góc với
tuyến đo.
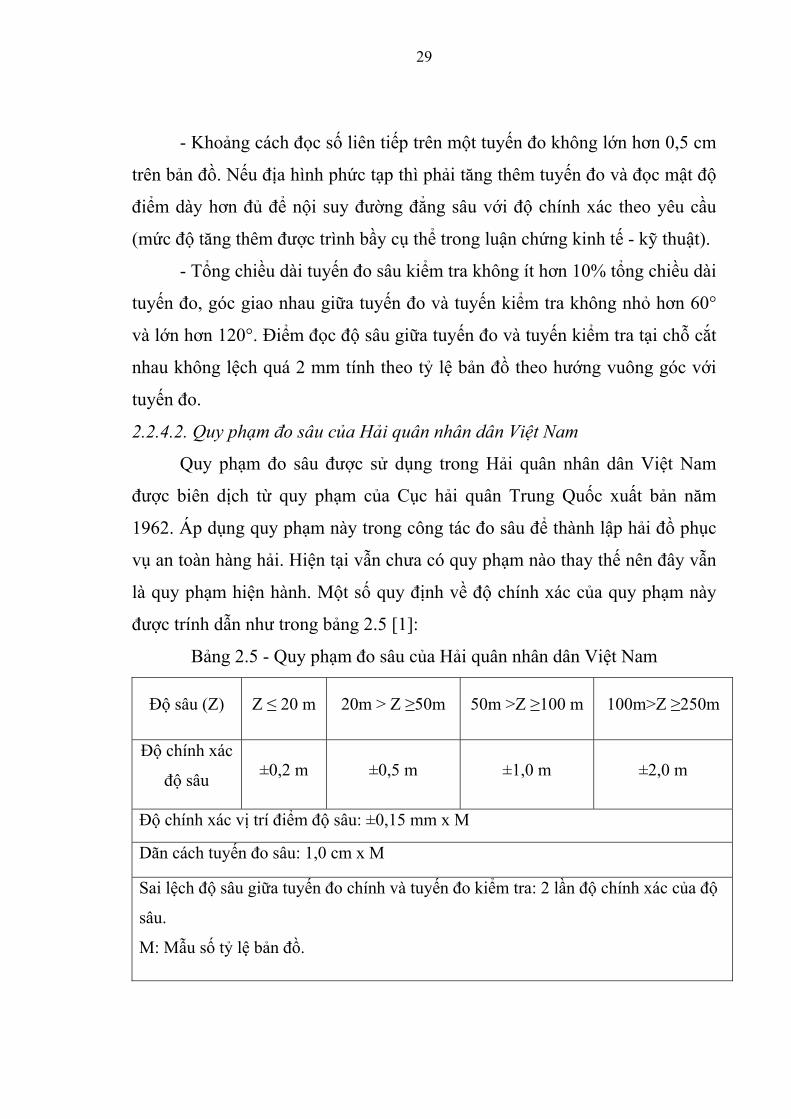
2.2.4.2. Quy phạm đo sâu của Hải quân nhân dân Việt Nam
Quy phạm đo sâu được sử dụng trong Hải quân nhân dân Việt Nam
được biên dịch từ quy phạm của Cục hải quân Trung Quốc xuất bản năm
1962. Áp dụng quy phạm này trong công tác đo sâu để thành lập hải đồ phục
vụ an toàn hàng hải. Hiện tại vẫn chưa có quy phạm nào thay thế nên đây vẫn
là quy phạm hiện hành. Một số quy định về độ chính xác của quy phạm này
được trính dẫn như trong bảng 2.5 [1]:
Bảng 2.5 - Quy phạm đo sâu của Hải quân nhân dân Việt Nam
Độ sâu (Z) Z ≤ 20 m 20m > Z ≥50m 50m >Z ≥100 m 100m>Z ≥250m
Độ chính xác
độ sâu ±0,2 m ±0,5 m ±1,0 m ±2,0 m
Độ chính xác vị trí điểm độ sâu: ±0,15 mm x M
Dãn cách tuyến đo sâu: 1,0 cm x M
Sai lệch độ sâu giữa tuyến đo chính và tuyến đo kiểm tra: 2 lần độ chính xác của độ
sâu.
M: Mẫu số tỷ lệ bản đồ.
30
2.3. XÂY DỰNG LUẬN CỨ KHOA HỌC XÁC ĐỊNH YÊU CẦU ĐỘ CHÍNH
XÁC CỦA BĐĐHĐB VEN BỜ TỶ LỆ LỚN Ở VIỆT NAM
Theo đánh giá về tình hình nghiên cứu trong phần tổng quan, hiện nay ở Việt Nam chưa có quy phạm hay tiêu chuẩn kỹ thuật dùng trong đo vẽ BĐĐHĐB ven bờ tỷ lệ lớn. Vì vậy cần phải tiến hành nghiên cứu xây dựng luận cứ khoa học về yêu cầu độ chính xác của BĐĐHĐB ven bờ tỷ lệ lớn.
2.3.1. Khái niệm tỷ lệ lớn của BĐĐHĐB ven bờ Dựa vào các kết quả nghiên cứu, khảo sát các dự án xây dựng công trình ven biển, chúng tôi thấy rằng trong giai đoạn khảo sát thiết kế và thi công các công trình này thì tỷ lệ bản đồ địa hình đáy biển cần đo vẽ thay đổi
từ tỷ lệ 1/500 ÷ 1/5 000. Trong đó tỷ lệ 1/500 là tỷ lệ rất lớn với công tác đo
đạc trên biển (hạng đặc biệt), tiêu chuẩn độ chính xác của tỷ lệ này có thể áp dụng theo Thông tư 24/2010/TT-BTNMT ngày 27 tháng 10 năm 2010 của Bộ Tài nguyên và Môi trường [29]. Vậy có thể định nghĩa BĐĐHĐB ven bờ tỷ lệ
lớn sẽ bao hàm các tỷ lệ đo vẽ từ 1/1 000 ÷ 1/5 000 và trong luận án chỉ xây
dựng chỉ tiêu độ chính xác cho các loại tỷ lệ từ 1/1 000 ÷ 1/5 000.
Độ chính xác của BĐĐHĐB tỷ lệ lớn phụ thuộc vào hai yếu tố: độ chính xác về vị trí mặt bằng của điểm đo sâu và độ chính xác đo sâu.
2.3.2. Độ chính xác về vị trí mặt bằng của điểm đo sâu Theo các tiêu chuẩn kỹ thuật hiện hành tại Việt Nam như của Bộ tài
nguyên và Môi trường, Hải Quân nhân dân Việt Nam độ chính xác về vị trí mặt bằng được thống kê trong bảng 2.6.
Bảng 2.6 - Độ chính xác về vị trí mặt bằng của điểm đo sâu hiện có
Theo tiêu chuẩn Tỷ lệ BĐ Quy định mp (m)
HQND Việt Nam 1/100 000 mp = 0,15 mm x M 15 m
Bộ TNMT 1/50 000 mp = 0,30 mm x M 15 m
Bộ TNMT 1/10 000 mp = 1,0 mm x M 10 m
31
Để xây dựng luận cứ khoa học về chỉ tiêu kỹ thuật độ chính xác về vị
trí mặt bằng của điểm đo sâu trong đo vẽ thành lập BĐĐHĐB ven bờ tỷ lệ lớn
cần dựa vào các cơ sở khoa học sau đây:
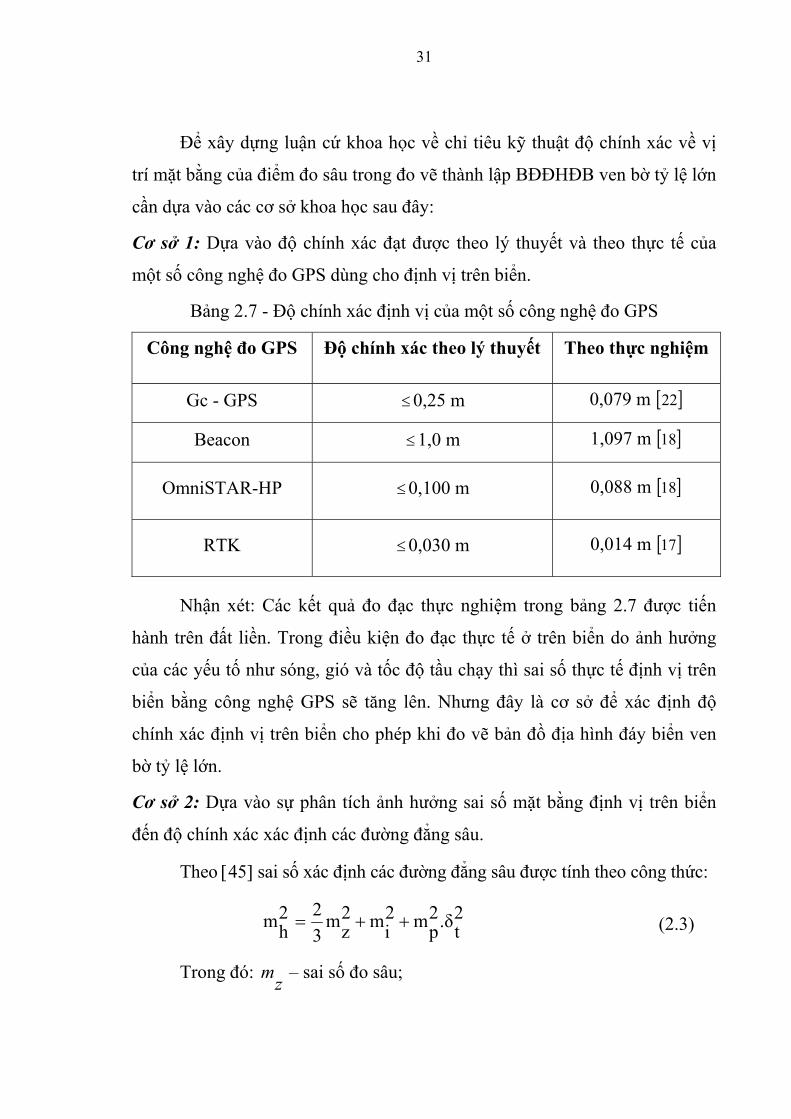
Cơ sở 1: Dựa vào độ chính xác đạt được theo lý thuyết và theo thực tế của
một số công nghệ đo GPS dùng cho định vị trên biển.
Bảng 2.7 - Độ chính xác định vị của một số công nghệ đo GPS
Công nghệ đo GPS Độ chính xác theo lý thuyết Theo thực nghiệm
Gc - GPS ≤ 0,25 m 0,079 m [ ]22
Beacon ≤ 1,0 m 1,097 m [ ]18
OmniSTAR-HP ≤ 0,100 m 0,088 m [ ]18
RTK ≤ 0,030 m 0,014 m [ ]17
Nhận xét: Các kết quả đo đạc thực nghiệm trong bảng 2.7 được tiến
hành trên đất liền. Trong điều kiện đo đạc thực tế ở trên biển do ảnh hưởng
của các yếu tố như sóng, gió và tốc độ tầu chạy thì sai số thực tế định vị trên
biển bằng công nghệ GPS sẽ tăng lên. Nhưng đây là cơ sở để xác định độ
chính xác định vị trên biển cho phép khi đo vẽ bản đồ địa hình đáy biển ven
bờ tỷ lệ lớn.
Cơ sở 2: Dựa vào sự phân tích ảnh hưởng sai số mặt bằng định vị trên biển
đến độ chính xác xác định các đường đẳng sâu.
Theo [45] sai số xác định các đường đẳng sâu được tính theo công thức:
2t.δ2
pm2im2
zm322
hm ++= (2.3)
Trong đó: zm – sai số đo sâu;
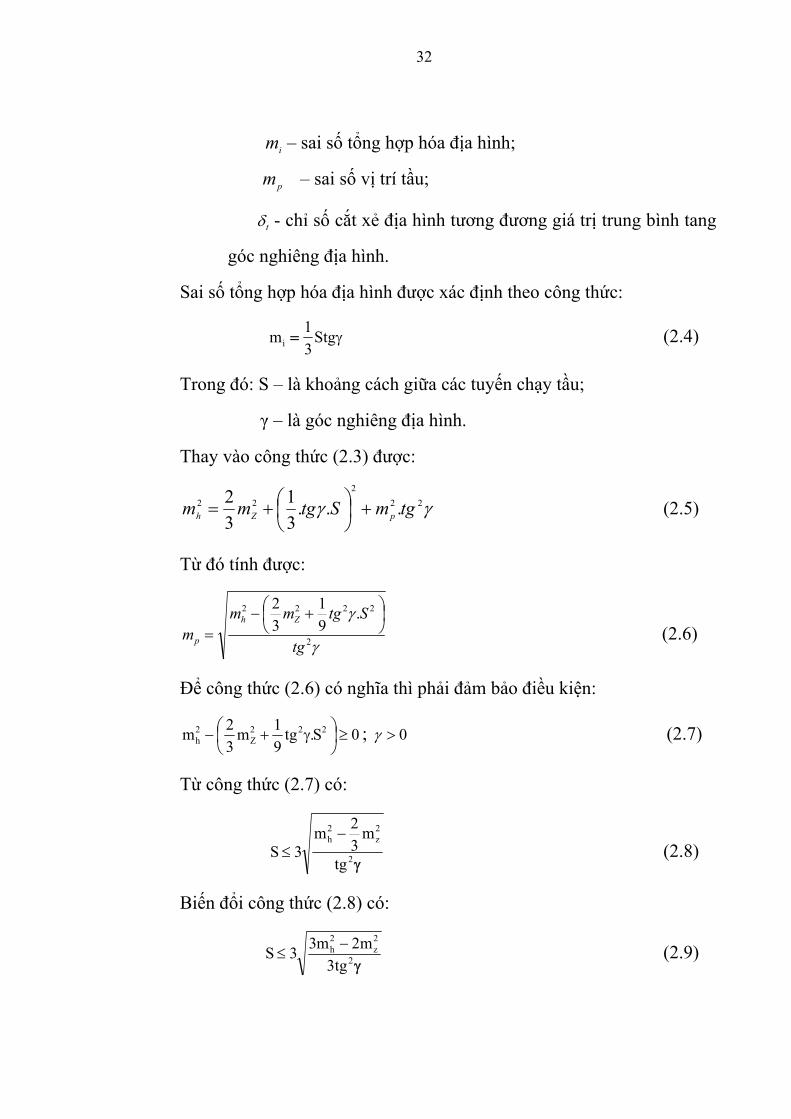
32
im – sai số tổng hợp hóa địa hình;
pm – sai số vị trí tầu;
tδ - chỉ số cắt xẻ địa hình tương đương giá trị trung bình tang
góc nghiêng địa hình.
Sai số tổng hợp hóa địa hình được xác định theo công thức:
γStg31mi = (2.4)
Trong đó: S – là khoảng cách giữa các tuyến chạy tầu;
γ – là góc nghiêng địa hình.
Thay vào công thức (2.3) được:
γγ 222
22 ...31
32 tgmStgmm pZh +⎟
⎠⎞
⎜⎝⎛+= (2.5)
Từ đó tính được:
γ
γ
2
2222 .91
32
tg
Stgmmm
Zh
p
⎟⎠⎞
⎜⎝⎛ +−
= (2.6)
Để công thức (2.6) có nghĩa thì phải đảm bảo điều kiện:
0S.tg91m
32m 222
Z2h ≥⎟
⎠⎞
⎜⎝⎛ γ+− ; 0>γ (2.7)
Từ công thức (2.7) có:
γ2
2z
2h
tg
m32m
3S−
≤
(2.8)
Biến đổi công thức (2.8) có:
γ2
2z
2h
tg3m2m33S −
≤
(2.9)
33
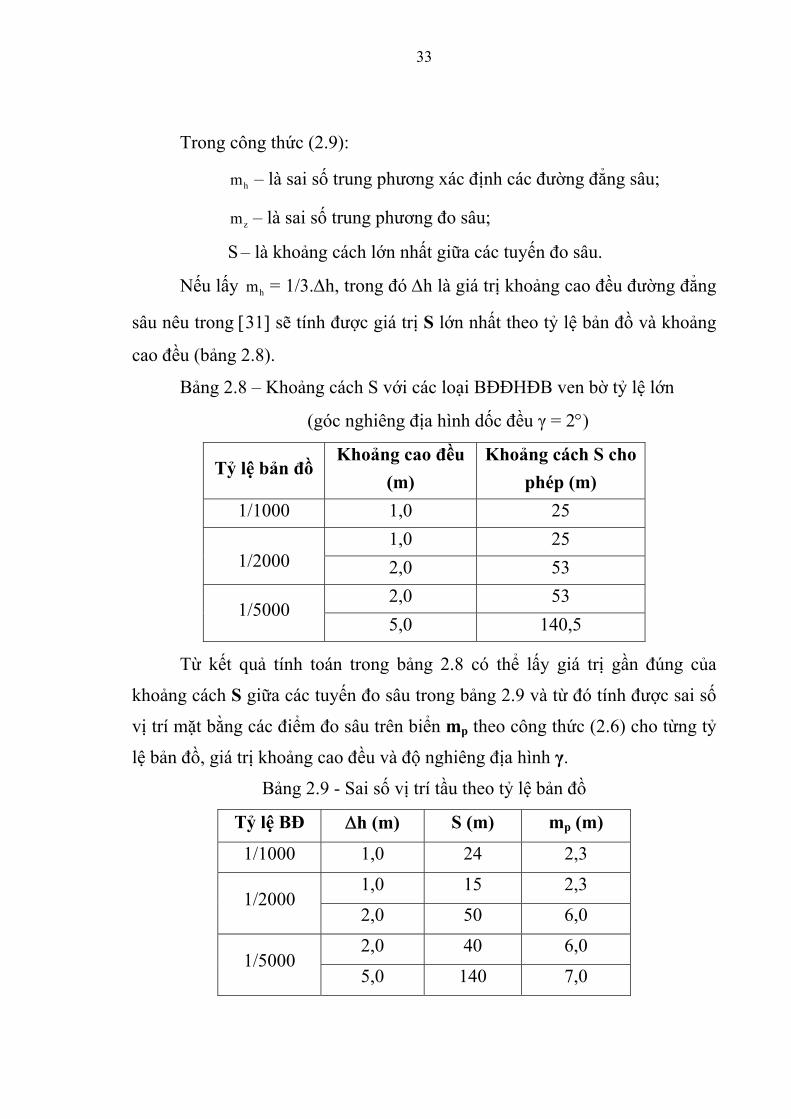
Trong công thức (2.9):
hm – là sai số trung phương xác định các đường đẳng sâu;
zm – là sai số trung phương đo sâu;
S – là khoảng cách lớn nhất giữa các tuyến đo sâu.
Nếu lấy hm = 1/3.Δh, trong đó Δh là giá trị khoảng cao đều đường đẳng
sâu nêu trong [31] sẽ tính được giá trị S lớn nhất theo tỷ lệ bản đồ và khoảng
cao đều (bảng 2.8).
Bảng 2.8 – Khoảng cách S với các loại BĐĐHĐB ven bờ tỷ lệ lớn
(góc nghiêng địa hình dốc đều γ = 2°)
Tỷ lệ bản đồ Khoảng cao đều
(m) Khoảng cách S cho
phép (m) 1/1000 1,0 25
1,0 25
1/2000 2,0 53 2,0 53
1/5000 5,0 140,5
Từ kết quả tính toán trong bảng 2.8 có thể lấy giá trị gần đúng của
khoảng cách S giữa các tuyến đo sâu trong bảng 2.9 và từ đó tính được sai số
vị trí mặt bằng các điểm đo sâu trên biển mp theo công thức (2.6) cho từng tỷ
lệ bản đồ, giá trị khoảng cao đều và độ nghiêng địa hình γ.
Bảng 2.9 - Sai số vị trí tầu theo tỷ lệ bản đồ
Tỷ lệ BĐ Δh (m) S (m) mp (m)
1/1000 1,0 24 2,3
1,0 15 2,3 1/2000
2,0 50 6,0
2,0 40 6,0 1/5000
5,0 140 7,0
34
Nhận xét: Từ kết quả tính toán trong bảng 2.9 cho thấy sai số cho phép
xác định vị trí mặt bằng các điểm đo sâu trên biển khi đo vẽ bản đồ địa hình
đáy biển tỷ lệ lớn cần phải đảm bảo giá trị từ 2,3 đến 7,0 m phụ thuộc vào tỷ
lệ đo vẽ và khoảng cao đều.
Cơ sở 3: Xuất phát từ tương quan mối quan hệ giữa tốc độ chạy tầu và
khoảng thời gian tối thiểu để hệ thống định vị điểm đo GPS fixed một giá trị.
Tốc độ chạy tầu là tốc độ tối đa mà tầu có thể chạy để đo được toàn bộ 100%
bề mặt đáy biển, do đó trong khi thiết kế tùy thuộc vào loại máy (với máy đo
sâu đa tia) cần phải tính toán tốc độ để tầu có thể chạy được nhanh nhất nhằm
tăng năng suất lao động, đồng thời vẫn đảm bảo mật độ theo yêu cầu tỷ lệ bản
đồ cần thành lập.
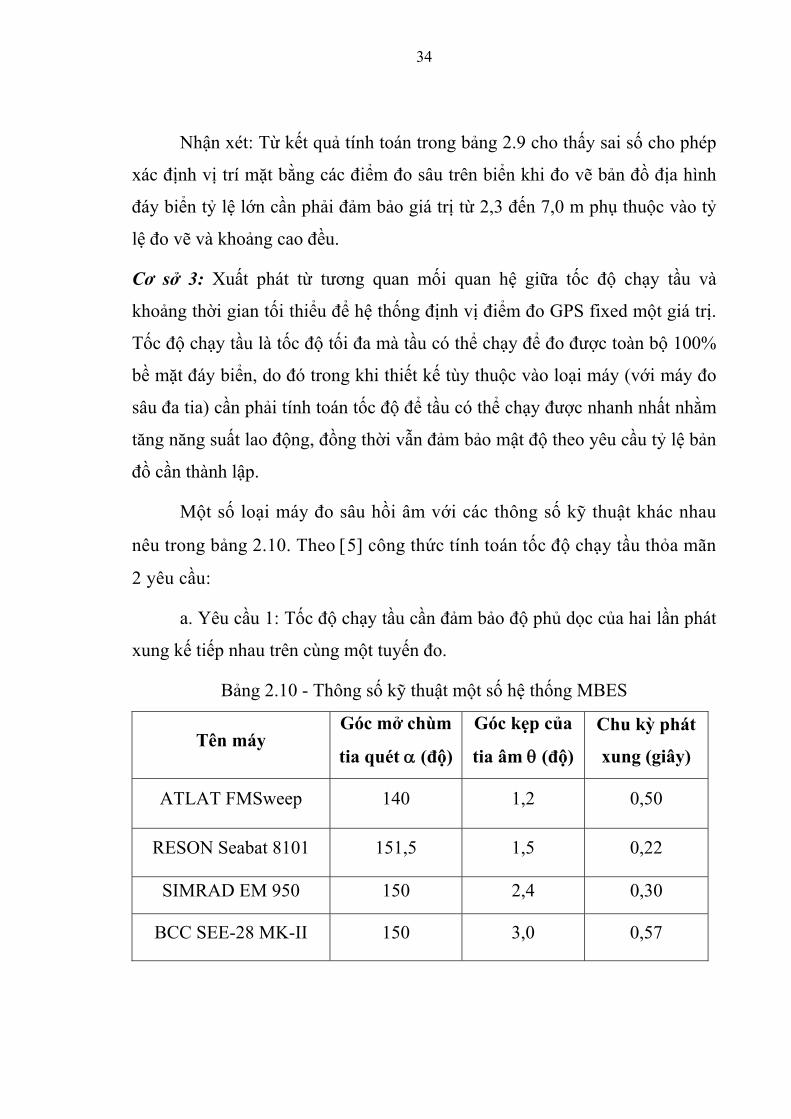
Một số loại máy đo sâu hồi âm với các thông số kỹ thuật khác nhau
nêu trong bảng 2.10. Theo [5] công thức tính toán tốc độ chạy tầu thỏa mãn
2 yêu cầu:
a. Yêu cầu 1: Tốc độ chạy tầu cần đảm bảo độ phủ dọc của hai lần phát
xung kế tiếp nhau trên cùng một tuyến đo.
Bảng 2.10 - Thông số kỹ thuật một số hệ thống MBES
Tên máy Góc mở chùm
tia quét α (độ)
Góc kẹp của
tia âm θ (độ)
Chu kỳ phát
xung (giây)
ATLAT FMSweep 140 1,2 0,50
RESON Seabat 8101 151,5 1,5 0,22
SIMRAD EM 950 150 2,4 0,30
BCC SEE-28 MK-II 150 3,0 0,57
35
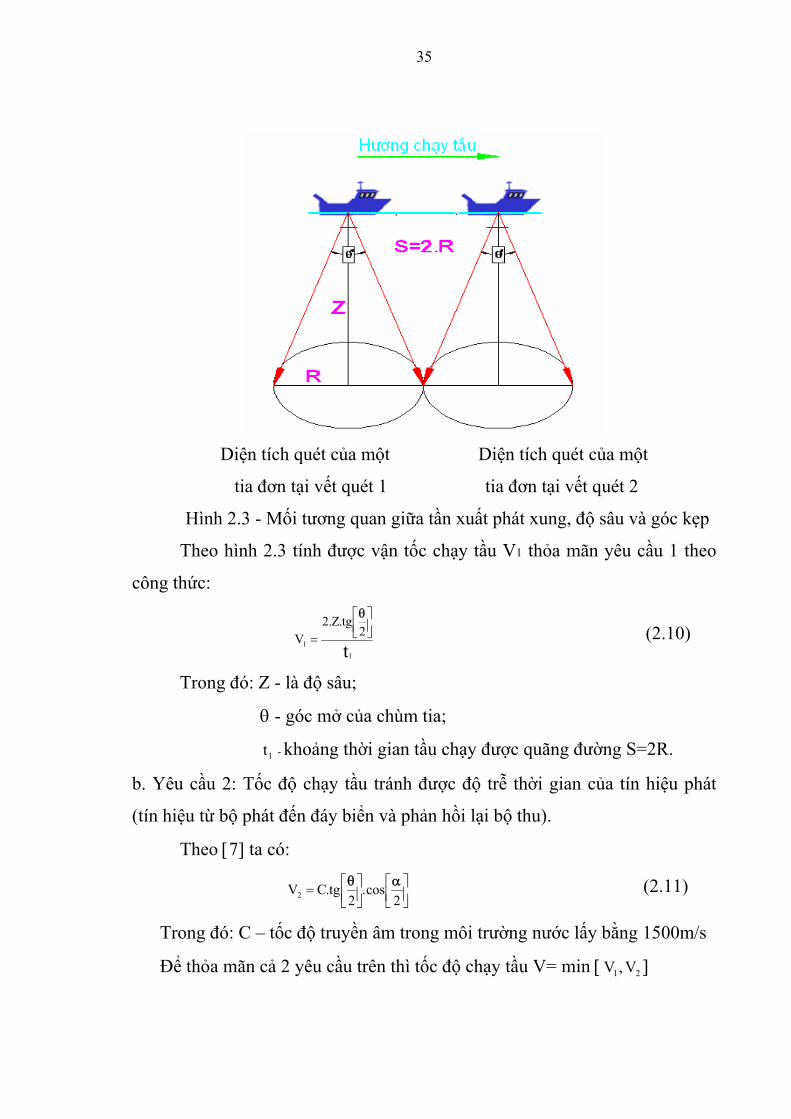
Diện tích quét của một Diện tích quét của một
tia đơn tại vết quét 1 tia đơn tại vết quét 2
Hình 2.3 - Mối tương quan giữa tần xuất phát xung, độ sâu và góc kẹp
Theo hình 2.3 tính được vận tốc chạy tầu V1 thỏa mãn yêu cầu 1 theo
công thức:
t1
12
tg.Z.2V
⎥⎦⎤
⎢⎣⎡
=
θ
(2.10)
Trong đó: Z - là độ sâu;
θ - góc mở của chùm tia;
1t - khoảng thời gian tầu chạy được quãng đường S=2R.
b. Yêu cầu 2: Tốc độ chạy tầu tránh được độ trễ thời gian của tín hiệu phát
(tín hiệu từ bộ phát đến đáy biển và phản hồi lại bộ thu).
Theo [7] ta có:
⎥⎦⎤
⎢⎣⎡
⎥⎦⎤
⎢⎣⎡=
2cos.
2tg.CV2
αθ (2.11)
Trong đó: C – tốc độ truyền âm trong môi trường nước lấy bằng 1500m/s
Để thỏa mãn cả 2 yêu cầu trên thì tốc độ chạy tầu V= min [ 21 V,V ]
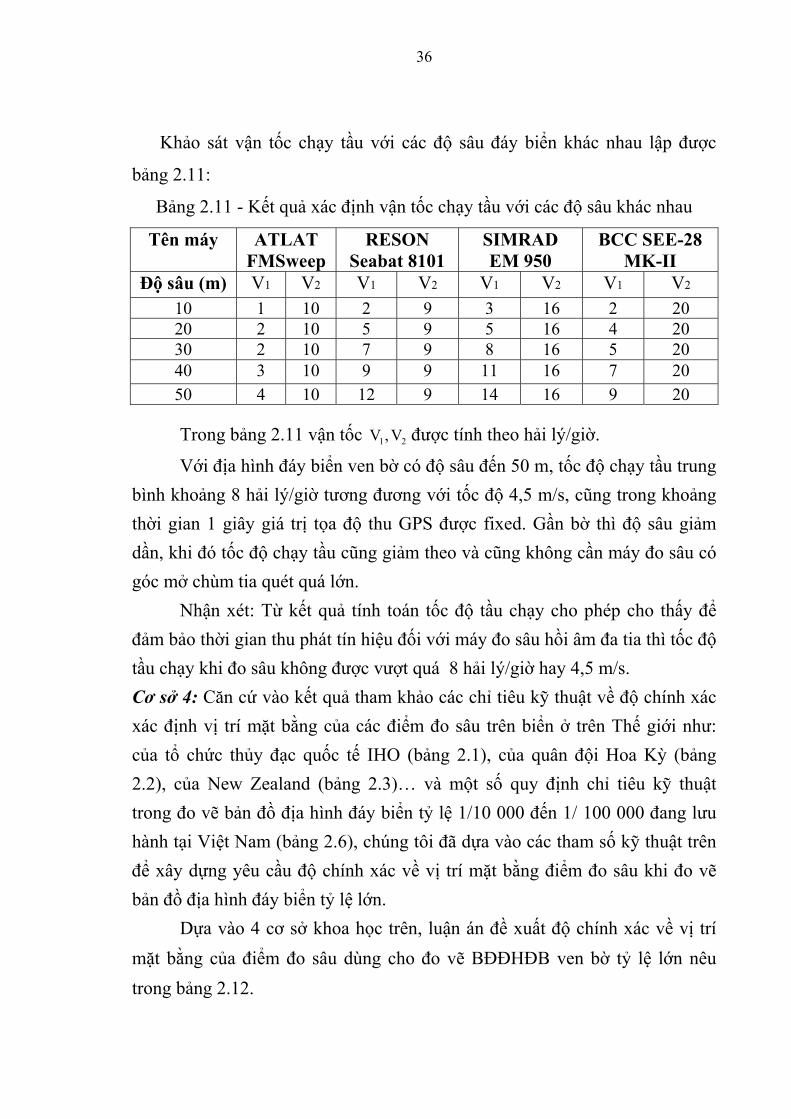
36
Khảo sát vận tốc chạy tầu với các độ sâu đáy biển khác nhau lập được
bảng 2.11:
Bảng 2.11 - Kết quả xác định vận tốc chạy tầu với các độ sâu khác nhau
Tên máy ATLAT FMSweep
RESON Seabat 8101
SIMRAD EM 950
BCC SEE-28 MK-II
Độ sâu (m) V1 V2 V1 V2 V1 V2 V1 V2 10 1 10 2 9 3 16 2 20 20 2 10 5 9 5 16 4 20 30 2 10 7 9 8 16 5 20 40 3 10 9 9 11 16 7 20 50 4 10 12 9 14 16 9 20
Trong bảng 2.11 vận tốc 21 V,V được tính theo hải lý/giờ.
Với địa hình đáy biển ven bờ có độ sâu đến 50 m, tốc độ chạy tầu trung bình khoảng 8 hải lý/giờ tương đương với tốc độ 4,5 m/s, cũng trong khoảng thời gian 1 giây giá trị tọa độ thu GPS được fixed. Gần bờ thì độ sâu giảm dần, khi đó tốc độ chạy tầu cũng giảm theo và cũng không cần máy đo sâu có góc mở chùm tia quét quá lớn.
Nhận xét: Từ kết quả tính toán tốc độ tầu chạy cho phép cho thấy để đảm bảo thời gian thu phát tín hiệu đối với máy đo sâu hồi âm đa tia thì tốc độ tầu chạy khi đo sâu không được vượt quá 8 hải lý/giờ hay 4,5 m/s. Cơ sở 4: Căn cứ vào kết quả tham khảo các chỉ tiêu kỹ thuật về độ chính xác xác định vị trí mặt bằng của các điểm đo sâu trên biển ở trên Thế giới như: của tổ chức thủy đạc quốc tế IHO (bảng 2.1), của quân đội Hoa Kỳ (bảng 2.2), của New Zealand (bảng 2.3)… và một số quy định chỉ tiêu kỹ thuật trong đo vẽ bản đồ địa hình đáy biển tỷ lệ 1/10 000 đến 1/ 100 000 đang lưu hành tại Việt Nam (bảng 2.6), chúng tôi đã dựa vào các tham số kỹ thuật trên để xây dựng yêu cầu độ chính xác về vị trí mặt bằng điểm đo sâu khi đo vẽ bản đồ địa hình đáy biển tỷ lệ lớn.
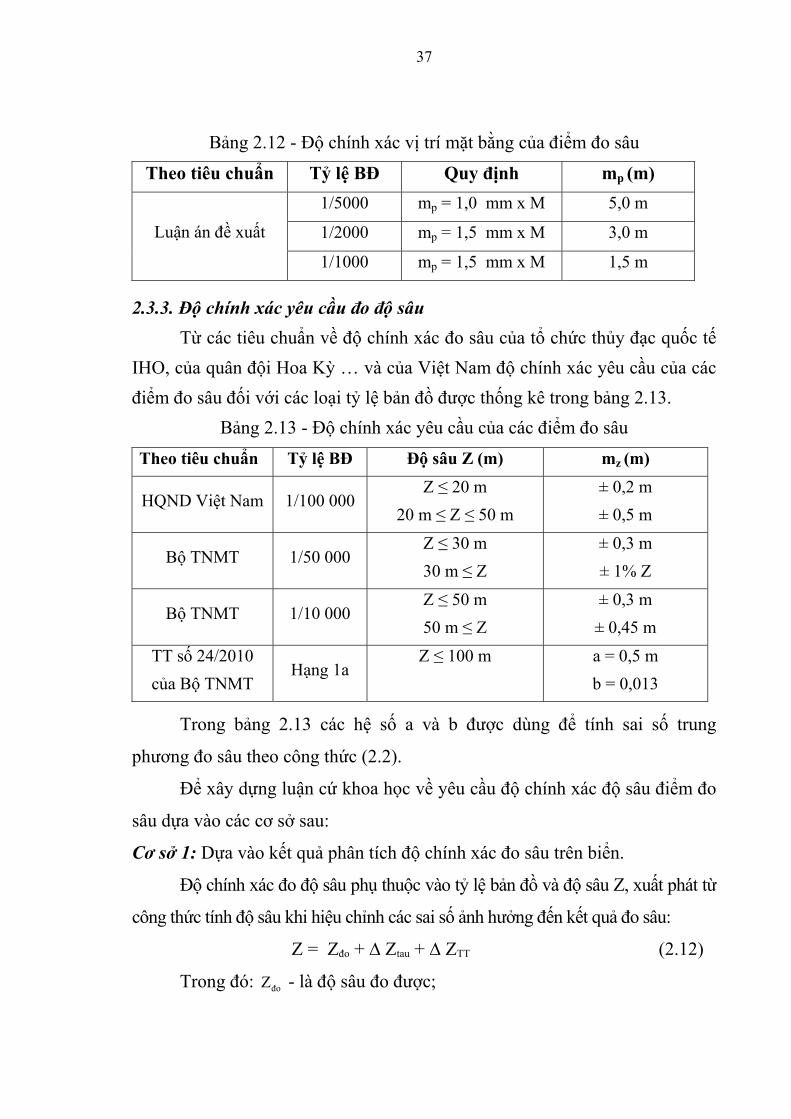
Dựa vào 4 cơ sở khoa học trên, luận án đề xuất độ chính xác về vị trí mặt bằng của điểm đo sâu dùng cho đo vẽ BĐĐHĐB ven bờ tỷ lệ lớn nêu trong bảng 2.12.
37
Bảng 2.12 - Độ chính xác vị trí mặt bằng của điểm đo sâu
Theo tiêu chuẩn Tỷ lệ BĐ Quy định mp (m) 1/5000 mp = 1,0 mm x M 5,0 m
1/2000 mp = 1,5 mm x M 3,0 m Luận án đề xuất
1/1000 mp = 1,5 mm x M 1,5 m
2.3.3. Độ chính xác yêu cầu đo độ sâu Từ các tiêu chuẩn về độ chính xác đo sâu của tổ chức thủy đạc quốc tế IHO, của quân đội Hoa Kỳ … và của Việt Nam độ chính xác yêu cầu của các điểm đo sâu đối với các loại tỷ lệ bản đồ được thống kê trong bảng 2.13.
Bảng 2.13 - Độ chính xác yêu cầu của các điểm đo sâu
Theo tiêu chuẩn Tỷ lệ BĐ Độ sâu Z (m) mz (m)
HQND Việt Nam 1/100 000 Z ≤ 20 m
20 m ≤ Z ≤ 50 m ± 0,2 m ± 0,5 m
Bộ TNMT 1/50 000 Z ≤ 30 m 30 m ≤ Z
± 0,3 m ± 1% Z
Bộ TNMT 1/10 000 Z ≤ 50 m 50 m ≤ Z
± 0,3 m ± 0,45 m
TT số 24/2010 của Bộ TNMT
Hạng 1a Z ≤ 100 m
a = 0,5 m b = 0,013
Trong bảng 2.13 các hệ số a và b được dùng để tính sai số trung
phương đo sâu theo công thức (2.2).
Để xây dựng luận cứ khoa học về yêu cầu độ chính xác độ sâu điểm đo
sâu dựa vào các cơ sở sau:
Cơ sở 1: Dựa vào kết quả phân tích độ chính xác đo sâu trên biển.
Độ chính xác đo độ sâu phụ thuộc vào tỷ lệ bản đồ và độ sâu Z, xuất phát từ
công thức tính độ sâu khi hiệu chỉnh các sai số ảnh hưởng đến kết quả đo sâu:
Z = Zđo + ∆ Ztau + ∆ ZTT (2.12)
Trong đó: đoZ - là độ sâu đo được;
38
tauZΔ - số hiệu chỉnh do độ nâng hạ tầu khi đo;
TTZΔ - là số hiệu chỉnh thủy triều.
Đưa (2.12) về sai số trung phương:
2ZTT
2Ztau
2Zdo
2Z mmmm ++= (2.13)
Trong đó: zm - là sai số điểm đo độ sâu;
zdom - là sai số đo sâu;
Ztaum - là sai số do sự không ổn định của tầu đo;
ZTTm - là sai số đo thủy triều.
Tiến hành phân tích các nguồn sai số trong công thức 2.13:
a. Sai số đo sâu mZdo
Từ công thức xác định độ sâu:
tVZ .21
= (2.14)
Chuyển (2.14) về sai số trung phương:
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
+= Vt m.t21m.v
21
m22
2Zdo
(2.15)
Trong đó: V- là vận tốc âm thanh lấy bằng 1500 m/giây;
mt - sai số xác định thời gian truyền sóng âm;
t – là khoảng thời gian truyền sóng;
mV - sai số đo vận tốc âm thanh.
b. Sai số do sự không ổn định của tầu đo mZtau: sai số này được xác định theo
công thức [45]:
220
222γZZBLZtau mmmmm +++= (2.16)
Trong đó: mL - sai số nâng hạ đầu tầu khi đo;
mB - sai số lệch tâm cần phát biến;
mz0 - sai số do thời điểm phát xung và đồng hồ không trùng nhau;
mZγ - sai số do góc nghiêng địa hình đáy biển.
39
Một số đại lượng trong công thức (2.16) được tính như sau:
0
t0Z t
m.Zm = (2.17)
Trong đó: mt – là sai số đồng hồ;
Z – là độ sâu;
t0 – là khoảng thời gian chuẩn.
mZγ = γ.mγ.Z (2.18)
Trong đó: mγ - là sai số xác định góc nghiêng địa hình.
c. Sai số thủy triều được xác định theo công thức [45].
2f
2AB
2A
2TT mmmm ++= (2.19)
Trong đó: mA - là sai số trung phương xác định mức “0” độ sâu (mức
“0” hải đồ) tại trạm quan trắc mực nước biển cố định hoặc trạm quan trắc mực
nước biển phụ. Sai số này tại trạm quan trắc mực nước chính lấy bằng ±10 cm
và tại các trạm quan trắc phụ lấy bằng ±20 ÷ 30 cm [45].
mAB - sai số trung phương truyền số “0” độ sâu từ các trạm quan trắc
mực nước biển cố định hoặc trạm quan trắc mực nước biển phụ đến các điểm
quan trắc thủy triều tại khu đo. Sai số này lấy bằng ±10 cm [45].
mf - sai số trung phương tính số hiệu chỉnh do thủy triều vào độ sâu của
điểm đo sâu chi tiết trên biển. Theo [45] sai số này không được vượt quá sai
số cho phép đo sâu.
Khi đó công thức (2.13) sẽ có dạng: 22222
022222
fABAyZBLVtZ mmmmmmmmmm ++++++++=
(2.20)
Thay các công thức (2.15), (2.17) và (2.18) vào công thức (2.20):
( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
γ++++++++= γ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ m.
tm
Vmzmmmmmmm
2
22
22f
2AB
2A
2B
2L
2t
2Z
0
tV. (2.21)

40
Ký hiệu:
2f
2AB
2A
2B
2L
2t
2 mmmmmma +++++= (2.22)
( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡++= ⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛m
tm
Vm
b tvγγ . 2
22
2
0
(2.23)
Ta có công thức: bzamz
2222 .+= (2.24)
Thay các giá trị: mt = 0,0001 giây; mL = 5 cm; mB = 1,0 cm; mA = 10 cm; mAB = 10 cm; mf = 10 cm vào công thức (2.22) tính được a = 19,55 cm..
Để xác định hệ số b có thể dựa vào thông tin từ các hãng sản xuất máy đo sâu. Do các tính chất kỹ thuật nên các thông tin để tính hệ số b không thể thực hiện được. Vì vậy để xác định hệ số b chúng tôi dựa vào các chỉ tiêu kỹ thuật trong các quy phạm đo sâu trên thế giới và dựa vào Thông tư số 24/2010 của Bộ Tài nguyên và Môi trường [29] xác định được hệ số b lấy bằng 0,0075. Cơ sở 2: Căn cứ vào các tài liệu tham khảo về yêu cầu độ chính xác đo sâu của các nước trên thế giới và ở Việt Nam. Dựa trên 2 tiêu chí này có thể đưa ra một số chỉ tiêu kỹ thuật về độ chính xác độ cao của điểm đo sâu trên biển.
Bảng 2.14 - Độ chính xác yêu cầu đo sâu Tỷ lệ BĐ Độ sâu Z (m) mz (m) 1/5000 Z ≤ 30 m
30 m ≤ Z ≤ 50 m± 0,3 m ± 0,5 m
1/2000 Z ≤ 30 m Z > 30 m
± 0,3 m a = 0,25 m; b = 0,0075
Luận án đề xuất
1/1000 Z ≤ 20 m Z > 20 m
± 0,2 m a = 0,25 m; b = 0,0075
Kết quả tính toán trong các bảng 2.12 và bảng 2.14 là các chỉ tiêu kỹ
thuật trong đo vẽ bản đồ địa hình đáy biển ven bờ tỷ lệ lớn được xây dựng
dựa trên những cơ sở khoa học đã trình bày. Đây mới chỉ là kết quả tính toán
lý thuyết, để khẳng định tính ứng dụng của các chỉ tiêu này cần phải tiếp tục
nghiên cứu, đo đạc thực nghiệm nhằm hoàn thiện thêm.
41
Chương 3
NGHIÊN CỨU KẾT HỢP CÔNG NGHỆ GPS VÀ THỦY ÂM
TRONG ĐO VẼ BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN TỶ LỆ LỚN
Qua tìm hiểu tình hình thực tế ở Việt Nam về công tác đo vẽ thành lập
BĐĐHĐB ven bờ tỷ lệ lớn có thể nhận thấy:
Tại Việt Nam đơn vị duy nhất có tầu đo sâu chuyên dụng là Đoàn 6
Hải Quân, các thiết bị định vị GPS và máy đo sâu hồi âm có độ chính xác
cao được ghép nối cố định trên tầu. Mục đích chính phục vụ cho nhiệm vụ
Quốc phòng, không dùng cho mục đích kinh tế, mặt khác do tầu đo lớn nên
không hiệu quả khi đo tại các dự án có quy mô < 100 ÷ 500 ha.
Với các dự án có quy mô diện tích < 100 ÷ 500 ha để tiến hành đo
đạc thành lập BĐĐHĐB ven bờ tỷ lệ lớn thường dùng tầu đo nhỏ (thuê lại
của dân địa phương), công việc bắt đầu là ghép nối, kiểm định hệ thống, đo
thử nghiệm trước khi tiến hành đo đạc chính thức để thu nhận dữ liệu. Do
đó cần phải nghiên cứu phương pháp ghép nối và kiểm định hệ thống GPS
– máy đo sâu hồi âm nhằm đáp ứng các yêu cầu kỹ thuật cần thiết khi đo vẽ
thành lập BĐĐHĐB ven bờ tỷ lệ lớn.
3.1. HỆ THỐNG ĐỊNH VỊ GPS TRÊN BIỂN
3.1.1. Các phương pháp đo GPS thường dùng trong đo vẽ BĐĐHĐB ở Việt Nam Do đặc điểm của môi trường đo đạc trên biển rất khó khăn, ảnh
hưởng của sóng, của gió, thủy triều và không có địa vật định hướng nên
công nghệ GPS đặc biệt có hiệu quả trong lĩnh vực đo đạc thành lập bản đồ
địa hình đáy biển.
Dựa vào phương pháp đo, phương pháp hiệu chỉnh số liệu GPS, tên
dịch vụ cung cấp mà có thể ứng dụng các phương pháp đo sau:
42
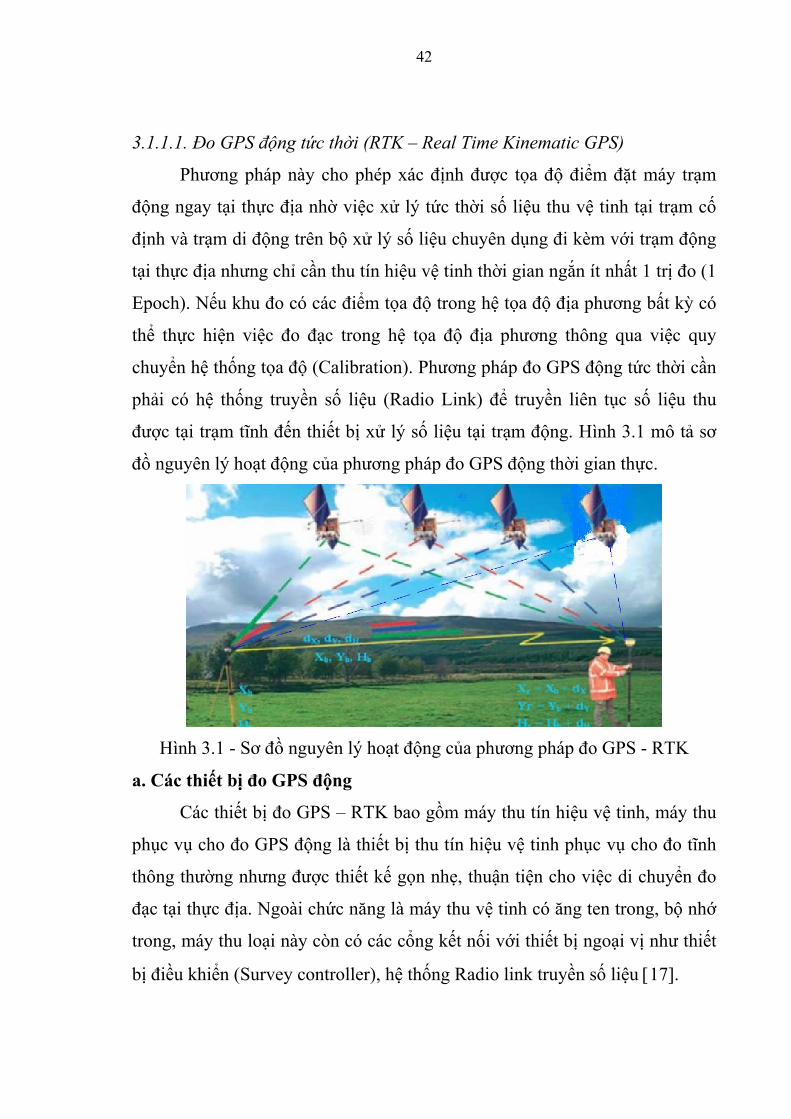
3.1.1.1. Đo GPS động tức thời (RTK – Real Time Kinematic GPS)
Phương pháp này cho phép xác định được tọa độ điểm đặt máy trạm
động ngay tại thực địa nhờ việc xử lý tức thời số liệu thu vệ tinh tại trạm cố
định và trạm di động trên bộ xử lý số liệu chuyên dụng đi kèm với trạm động
tại thực địa nhưng chỉ cần thu tín hiệu vệ tinh thời gian ngắn ít nhất 1 trị đo (1
Epoch). Nếu khu đo có các điểm tọa độ trong hệ tọa độ địa phương bất kỳ có
thể thực hiện việc đo đạc trong hệ tọa độ địa phương thông qua việc quy
chuyển hệ thống tọa độ (Calibration). Phương pháp đo GPS động tức thời cần
phải có hệ thống truyền số liệu (Radio Link) để truyền liên tục số liệu thu
được tại trạm tĩnh đến thiết bị xử lý số liệu tại trạm động. Hình 3.1 mô tả sơ
đồ nguyên lý hoạt động của phương pháp đo GPS động thời gian thực.
Hình 3.1 - Sơ đồ nguyên lý hoạt động của phương pháp đo GPS - RTK
a. Các thiết bị đo GPS động
Các thiết bị đo GPS – RTK bao gồm máy thu tín hiệu vệ tinh, máy thu
phục vụ cho đo GPS động là thiết bị thu tín hiệu vệ tinh phục vụ cho đo tĩnh
thông thường nhưng được thiết kế gọn nhẹ, thuận tiện cho việc di chuyển đo
đạc tại thực địa. Ngoài chức năng là máy thu vệ tinh có ăng ten trong, bộ nhớ
trong, máy thu loại này còn có các cổng kết nối với thiết bị ngoại vị như thiết
bị điều khiển (Survey controller), hệ thống Radio link truyền số liệu [17].
43
b. Giải pháp kỹ thuật trong đo GPS động
Để giảm được thời gian đo mà vẫn đảm bảo độ chính xác cần thiết các
nhà thiết kế đã đưa ra các giải pháp kỹ thuật đặc biệt đó là thủ tục khởi đo
(Initialization) và quy chuẩn hệ tọa độ (Site Calibration).
* Thủ tục khởi đo (Initialization), cho phép xác định nhanh số nguyên lần
bước sóng từ vệ tinh đến ăng ten máy thu dựa vào việc thu tín hiệu vệ tinh (trị
đo C/A Code và trị đo Phase). Khi đã có được số nguyên đa trị thì việc giải
tọa độ các điểm đo tiếp theo chỉ cần với số lượng ít trị đo (1 ÷ 2 trị đo).
Đường đáy đã biết ở đây có thể chọn là 2 điểm đã biết tọa độ, có thể là
một đoạn thẳng có độ dài xác định được định hướng theo hướng Bắc hoặc
cũng có thể là một đoạn thẳng được đo theo phương pháp tĩnh. Sau khi giải
được số nguyên đa trị qua phép khởi đo, việc đo đạc các điểm khác được tiến
hành chỉ cần thời gian đo ngắn (chỉ cần thu 1 ÷ 2 trị đo) nếu cả trạm cố định
(Base) và trạm động (Rover) đều truy trì việc thu liên tục tín hiệu của ít nhất 4
vệ tinh. Tọa độ của các điểm đo được tính với số liệu đo ít, do vậy số liệu đo
được kiểm tra tại thực địa nếu số liệu thu được trong điều kiện không đảm
bảo độ chính xác (PDOP lớn), thiết bị đo sẽ không cho phép đo. Khi mất tín
hiệu thu vệ tinh hoặc số lượng vệ tinh ít hơn 4 thì thông tin về số nguyên đa
trị bị mất, việc khởi đo phải được tiến hành lại.
* Thủ tục quy chuẩn hệ tọa độ (Site Calibration)
Đo GPS động là một dạng đo GPS tương đối tức là chỉ xác định được số
gia tọa độ trong hệ WGS84 của điểm trạm động so với trạm tĩnh. Để sử dụng
được kết quả này về hệ tọa độ địa phương cần phải có thông số chuyển đổi.
Việc chuyển đổi đó gọi là thủ tục quy chuẩn hệ tọa độ (Site Calibration).
Việc quy chuẩn hệ tọa độ có thể sử dụng một trong 2 cách sau:
+ Sử dụng 7 tham số tính chuyển
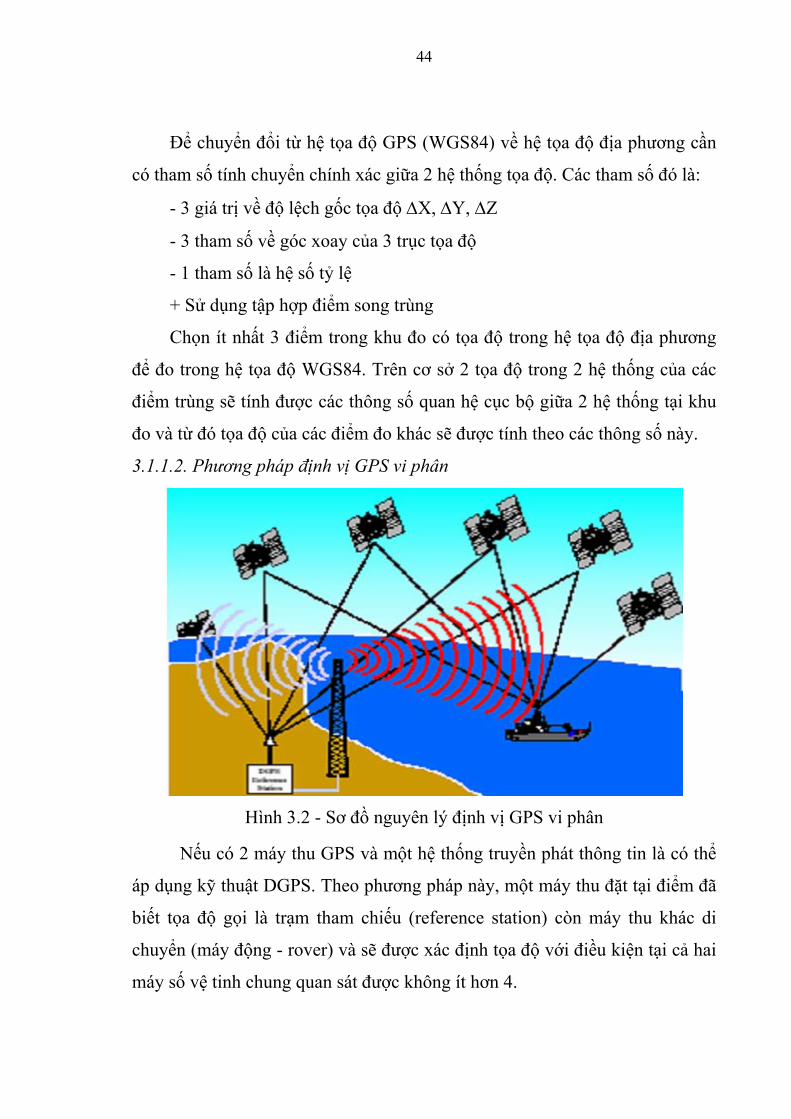
44
Để chuyển đổi từ hệ tọa độ GPS (WGS84) về hệ tọa độ địa phương cần
có tham số tính chuyển chính xác giữa 2 hệ thống tọa độ. Các tham số đó là:
- 3 giá trị về độ lệch gốc tọa độ ΔX, ΔY, ΔZ
- 3 tham số về góc xoay của 3 trục tọa độ
- 1 tham số là hệ số tỷ lệ
+ Sử dụng tập hợp điểm song trùng
Chọn ít nhất 3 điểm trong khu đo có tọa độ trong hệ tọa độ địa phương
để đo trong hệ tọa độ WGS84. Trên cơ sở 2 tọa độ trong 2 hệ thống của các
điểm trùng sẽ tính được các thông số quan hệ cục bộ giữa 2 hệ thống tại khu
đo và từ đó tọa độ của các điểm đo khác sẽ được tính theo các thông số này.
3.1.1.2. Phương pháp định vị GPS vi phân
Hình 3.2 - Sơ đồ nguyên lý định vị GPS vi phân
Nếu có 2 máy thu GPS và một hệ thống truyền phát thông tin là có thể
áp dụng kỹ thuật DGPS. Theo phương pháp này, một máy thu đặt tại điểm đã
biết tọa độ gọi là trạm tham chiếu (reference station) còn máy thu khác di
chuyển (máy động - rover) và sẽ được xác định tọa độ với điều kiện tại cả hai
máy số vệ tinh chung quan sát được không ít hơn 4.
45
Vị trí đã biết của điểm đặt máy thu cố định sẽ được sử dụng để tính các
số hiệu chỉnh GPS dưới dạng hiệu chỉnh vị trí điểm (gọi là phương pháp vị trí
– Position method) hoặc hiệu chỉnh các khoảng cách code đã được quan trắc
(gọi là phương pháp hiệu chỉnh trị đo hay phương pháp trị đo – Measurement
method). Các số hiệu chỉnh này sẽ được gửi đi bằng sóng vô tuyến (Radio
link) đến máy động và lập tức tính vị trí điểm để đạt được độ chính xác cao
hơn so với trường hợp định vị tuyệt đối.
Trong phương pháp hiệu chỉnh vị trí điểm, tại trạm tham chiếu A vào
thời điểm t sẽ tính được độ lệch tọa độ theo công thức:
⎪⎭
⎪⎬
⎫
−=−=−=
)t(ZZ)t(z)t(YY)t(y
)t(XX)t(x
AA
AA
AA
δδδ
(3.1)
Trong đó: XA, YA, ZA là tọa độ đã biết trong hệ tọa độ thực dụng của
điểm A.
XA(t), YA(t), ZA(t), là tọa độ định vị tuyệt đối bằng máy thu GPS đặt tại
A ở thời điểm t.
Hiệu tọa độ tính theo (3.1) được coi là số hiệu chỉnh vi phân và lập tức
được phát đi rộng rãi theo phương thức vô tuyến cho các trạm định vị tuyệt
đối khác để kịp hiệu chỉnh vào kết quả định vị (coi như ở cùng thời điểm t).
Tại trạm B, tọa độ định vị tuyệt đối GPS là XB(t), YB(t), ZB(t), khi đó
tọa độ sau cải chính vi phân sẽ là:
⎪⎭
⎪⎬
⎫
+=+=+=
)t(z)t(ZZ)t(y)t(YY)t(x)t(XX
BB
BB
BB
δδδ
(3.2)
Trong phương pháp hiệu chỉnh trị đo, số hiệu chỉnh cho khoảng cách
giả từ máy thu A đến vệ tinh j được tính theo công thức:
46
δρj(t) = ρj(t) – Rj(t) (3.3)
Trong đó ρj(t) là khoảng cách từ máy thu đến vệ tinh j được tính ra từ
tọa độ vệ tinh Xj (t), Yj (t), Zj (t) ở thời điểm t và tọa độ đã biết của điểm
tham chiếu A (XA, YA, ZA ), Rj(t) là khoảng cách giả máy thu xác định
được tại thời điểm t ở trạm tham chiếu .
Trong trường hợp này các số hiệu chỉnh δρj(t) lập tức được phát đến
máy thu di động. Tại trạm động, máy thu xác định được các khoảng cách
giả. Các khoảng cách giả này được cộng thêm với các số hiệu chỉnh δρj và
tại trạm động thực hiện tính toán định vị tuyệt đối theo khoảng cách giả đã
hiệu chỉnh. Phương pháp này linh hoạt và cho kết quả tốt hơn phương pháp
hiệu chỉnh tọa độ, song tại trạm máy của người sử dụng cần có thiết bị tính
toán để giải bài toán định vị.
Định vị vi phân còn cho phép xác định được tọa độ trong hệ thực dụng,
nếu tọa độ trạm tham chiếu đã được xác định trong hệ thực dụng. Hệ thống
truyền phát các số cải chính đóng vai trò quan trọng trong định vị vi phân. Số
cải chính vi phân tính theo (3.1) hoặc (3.3) thường được phát đi cho các trạm
thu trong bán kính khoảng vài trăm km. Phương pháp nêu trên chỉ sử dụng 1
trạm tham chiếu do đó được gọi là định vị vi phân trạm tham chiếu đơn
(Single Reference DGPS).
Hiện nay hệ thống định vị DGPS đã được xây dựng trên phạm vi
toàn cầu, trong đó cần sử dụng một số vệ tinh quỹ đạo thấp để thực hiện
dịch vụ Mobi-Phone ở mọi nơi trên Trái đất. Uỷ ban kỹ thuật Radio trong
dịch vụ hàng hải, Phân ban chuyên trách 104 mang tên RTCM SC-104
(Radio technical commission for maritime services special committee-104)
đã đưa ra chuẩn dữ liệu cải chính DGPS và đang được sử dụng rộng rãi
trên toàn cầu.
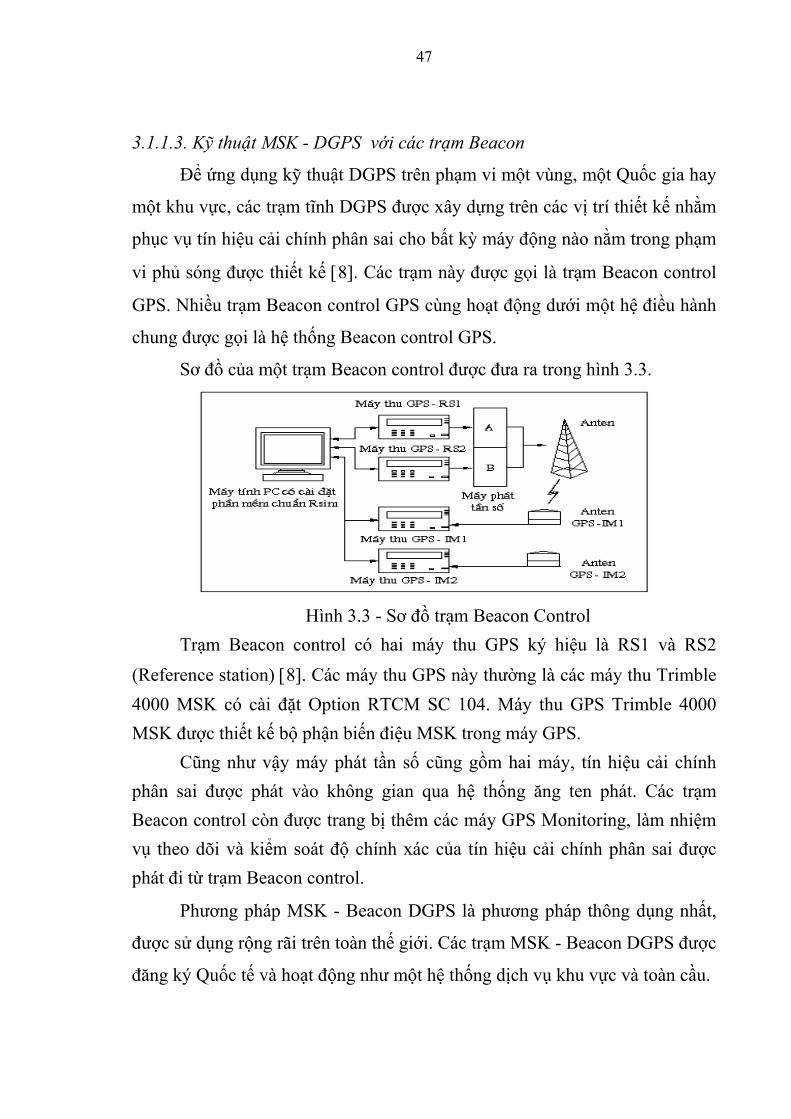
47
3.1.1.3. Kỹ thuật MSK - DGPS với các trạm Beacon
Để ứng dụng kỹ thuật DGPS trên phạm vi một vùng, một Quốc gia hay
một khu vực, các trạm tĩnh DGPS được xây dựng trên các vị trí thiết kế nhằm
phục vụ tín hiệu cải chính phân sai cho bất kỳ máy động nào nằm trong phạm
vi phủ sóng được thiết kế [8]. Các trạm này được gọi là trạm Beacon control
GPS. Nhiều trạm Beacon control GPS cùng hoạt động dưới một hệ điều hành
chung được gọi là hệ thống Beacon control GPS.
Sơ đồ của một trạm Beacon control được đưa ra trong hình 3.3.
Hình 3.3 - Sơ đồ trạm Beacon Control
Trạm Beacon control có hai máy thu GPS ký hiệu là RS1 và RS2 (Reference station) [8]. Các máy thu GPS này thường là các máy thu Trimble 4000 MSK có cài đặt Option RTCM SC 104. Máy thu GPS Trimble 4000 MSK được thiết kế bộ phận biến điệu MSK trong máy GPS.
Cũng như vậy máy phát tần số cũng gồm hai máy, tín hiệu cải chính phân sai được phát vào không gian qua hệ thống ăng ten phát. Các trạm Beacon control còn được trang bị thêm các máy GPS Monitoring, làm nhiệm vụ theo dõi và kiểm soát độ chính xác của tín hiệu cải chính phân sai được phát đi từ trạm Beacon control.
Phương pháp MSK - Beacon DGPS là phương pháp thông dụng nhất,
được sử dụng rộng rãi trên toàn thế giới. Các trạm MSK - Beacon DGPS được
đăng ký Quốc tế và hoạt động như một hệ thống dịch vụ khu vực và toàn cầu.
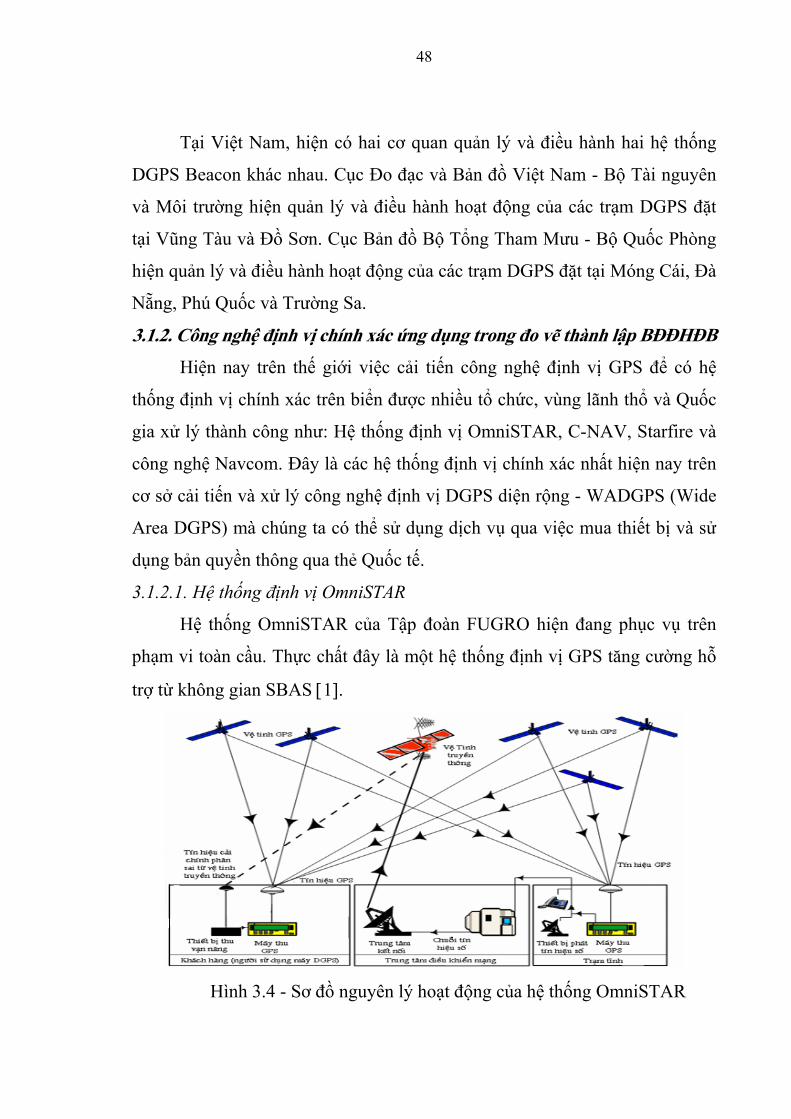
48
Tại Việt Nam, hiện có hai cơ quan quản lý và điều hành hai hệ thống
DGPS Beacon khác nhau. Cục Đo đạc và Bản đồ Việt Nam - Bộ Tài nguyên
và Môi trường hiện quản lý và điều hành hoạt động của các trạm DGPS đặt
tại Vũng Tàu và Đồ Sơn. Cục Bản đồ Bộ Tổng Tham Mưu - Bộ Quốc Phòng
hiện quản lý và điều hành hoạt động của các trạm DGPS đặt tại Móng Cái, Đà
Nẵng, Phú Quốc và Trường Sa.
3.1.2. Công nghệ định vị chính xác ứng dụng trong đo vẽ thành lập BĐĐHĐB Hiện nay trên thế giới việc cải tiến công nghệ định vị GPS để có hệ
thống định vị chính xác trên biển được nhiều tổ chức, vùng lãnh thổ và Quốc
gia xử lý thành công như: Hệ thống định vị OmniSTAR, C-NAV, Starfire và
công nghệ Navcom. Đây là các hệ thống định vị chính xác nhất hiện nay trên
cơ sở cải tiến và xử lý công nghệ định vị DGPS diện rộng - WADGPS (Wide
Area DGPS) mà chúng ta có thể sử dụng dịch vụ qua việc mua thiết bị và sử
dụng bản quyền thông qua thẻ Quốc tế.
3.1.2.1. Hệ thống định vị OmniSTAR
Hệ thống OmniSTAR của Tập đoàn FUGRO hiện đang phục vụ trên
phạm vi toàn cầu. Thực chất đây là một hệ thống định vị GPS tăng cường hỗ
trợ từ không gian SBAS [1].
Hình 3.4 - Sơ đồ nguyên lý hoạt động của hệ thống OmniSTAR
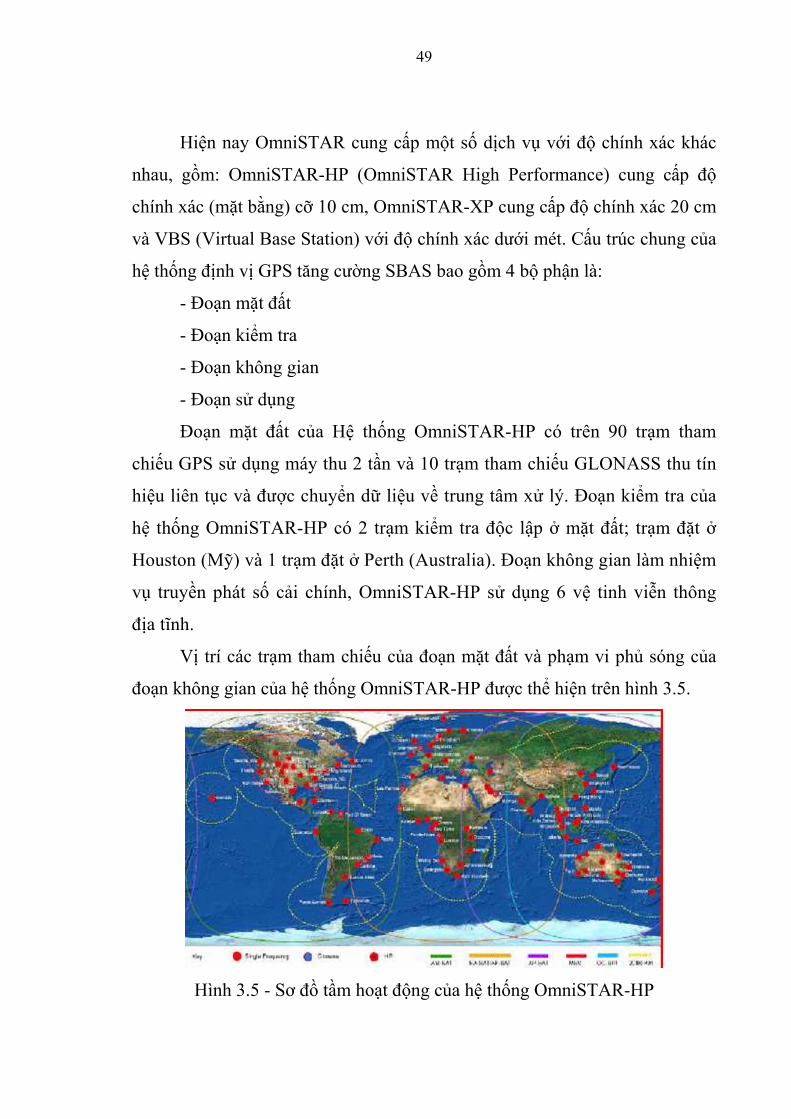
49
Hiện nay OmniSTAR cung cấp một số dịch vụ với độ chính xác khác
nhau, gồm: OmniSTAR-HP (OmniSTAR High Performance) cung cấp độ
chính xác (mặt bằng) cỡ 10 cm, OmniSTAR-XP cung cấp độ chính xác 20 cm
và VBS (Virtual Base Station) với độ chính xác dưới mét. Cấu trúc chung của
hệ thống định vị GPS tăng cường SBAS bao gồm 4 bộ phận là:
- Đoạn mặt đất
- Đoạn kiểm tra
- Đoạn không gian
- Đoạn sử dụng
Đoạn mặt đất của Hệ thống OmniSTAR-HP có trên 90 trạm tham
chiếu GPS sử dụng máy thu 2 tần và 10 trạm tham chiếu GLONASS thu tín
hiệu liên tục và được chuyển dữ liệu về trung tâm xử lý. Đoạn kiểm tra của
hệ thống OmniSTAR-HP có 2 trạm kiểm tra độc lập ở mặt đất; trạm đặt ở
Houston (Mỹ) và 1 trạm đặt ở Perth (Australia). Đoạn không gian làm nhiệm
vụ truyền phát số cải chính, OmniSTAR-HP sử dụng 6 vệ tinh viễn thông
địa tĩnh.
Vị trí các trạm tham chiếu của đoạn mặt đất và phạm vi phủ sóng của
đoạn không gian của hệ thống OmniSTAR-HP được thể hiện trên hình 3.5.
Hình 3.5 - Sơ đồ tầm hoạt động của hệ thống OmniSTAR-HP
50
Hình 3.6 - Hình ảnh máy thu OmniSTAR-HP của FUGRO
Đoạn sử dụng bao gồm các thiết bị thu tín hiệu GPS (hình 3.6),
GLONASS đồng thời thu cả tín hiệu cải chính DGPS từ các vệ tinh địa tĩnh.
Nhờ xử lý có xét tới hầu hết các nguồn sai số, độ chính xác định vị bằng hệ
thống OmniSTAR-HP ở chế độ tức thời là 10 cm về mặt bằng và 20 cm về độ
cao [1] với khoảng cách trạm sử dụng đến trạm tham chiếu không quá 500 km.
Nếu khoảng cách đến trạm tham chiếu tăng lên 1000 km, thì độ chính
xác về mặt bằng là 20 cm và về độ cao là 30 cm. Khuôn dạng dữ liệu cải
chính của OmniSTAR-HP là Fugro HPSCF, RTCM 104 (1, 3, 18 & 19). Có
một số thiết bị thu tín hiệu hệ thống OmniSTAR-HP do các hãng SOKKIA,
NOVATEL, HEMISPHERE, FUGRO chế tạo.
3.1.2.2. Công nghệ C-NAV
Hệ thống định vị GPS cải chính toàn cầu Gc-GPS ( Globally corrected
GPS) với thiết bị thu C-NAV do công ty C&C Technologies, Inc (Mỹ) chủ trì
xây dựng. Hệ thống có khả năng cung cấp dịch vụ định vị điểm chính xác
PPP (Precise point positioning) và được kết nối thông tin để cải chính tức thời
phục vụ trên toàn cầu. Độ chính xác định vị về mặt bằng cỡ 10 cm và về độ
cao khoảng 15 cm [1]. Hệ thống bao gồm 4 bộ phận là:
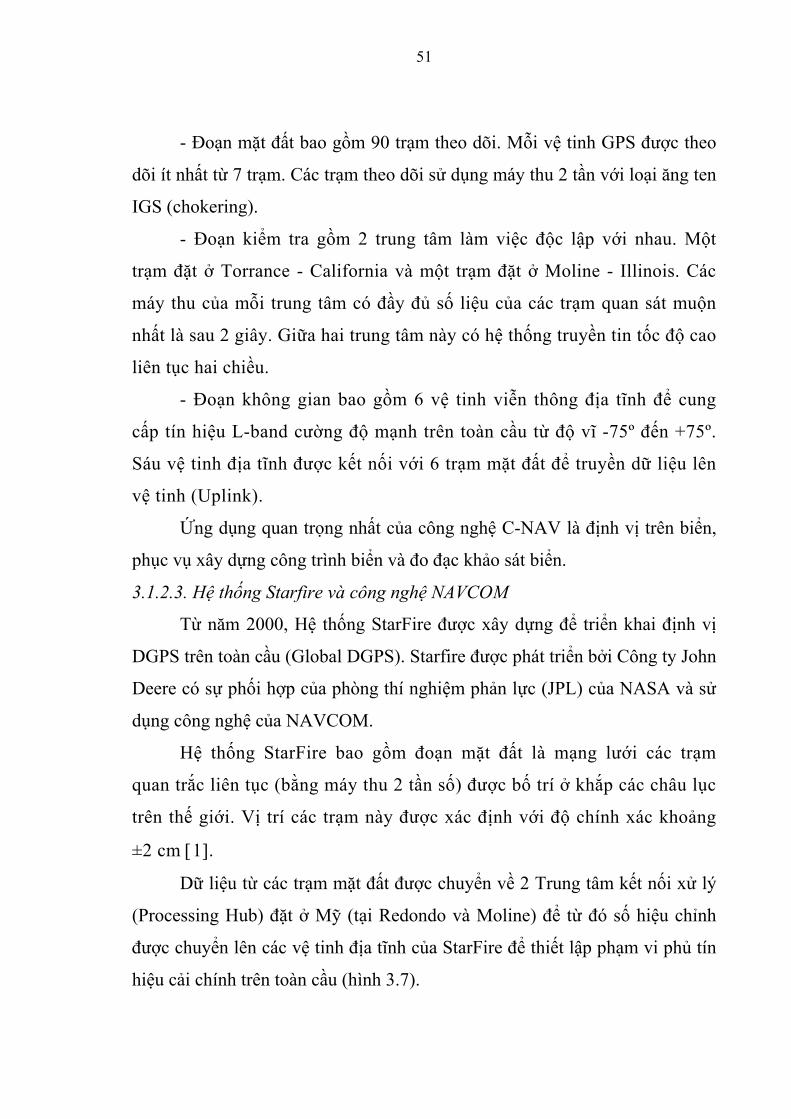
51
- Đoạn mặt đất bao gồm 90 trạm theo dõi. Mỗi vệ tinh GPS được theo
dõi ít nhất từ 7 trạm. Các trạm theo dõi sử dụng máy thu 2 tần với loại ăng ten
IGS (chokering).
- Đoạn kiểm tra gồm 2 trung tâm làm việc độc lập với nhau. Một
trạm đặt ở Torrance - California và một trạm đặt ở Moline - Illinois. Các
máy thu của mỗi trung tâm có đầy đủ số liệu của các trạm quan sát muộn
nhất là sau 2 giây. Giữa hai trung tâm này có hệ thống truyền tin tốc độ cao
liên tục hai chiều.
- Đoạn không gian bao gồm 6 vệ tinh viễn thông địa tĩnh để cung
cấp tín hiệu L-band cường độ mạnh trên toàn cầu từ độ vĩ -75º đến +75º.
Sáu vệ tinh địa tĩnh được kết nối với 6 trạm mặt đất để truyền dữ liệu lên
vệ tinh (Uplink).
Ứng dụng quan trọng nhất của công nghệ C-NAV là định vị trên biển,
phục vụ xây dựng công trình biển và đo đạc khảo sát biển.
3.1.2.3. Hệ thống Starfire và công nghệ NAVCOM
Từ năm 2000, Hệ thống StarFire được xây dựng để triển khai định vị
DGPS trên toàn cầu (Global DGPS). Starfire được phát triển bởi Công ty John
Deere có sự phối hợp của phòng thí nghiệm phản lực (JPL) của NASA và sử
dụng công nghệ của NAVCOM.
Hệ thống StarFire bao gồm đoạn mặt đất là mạng lưới các trạm
quan trắc liên tục (bằng máy thu 2 tần số) được bố trí ở khắp các châu lục
trên thế giới. Vị trí các trạm này được xác định với độ chính xác khoảng
±2 cm [1].
Dữ liệu từ các trạm mặt đất được chuyển về 2 Trung tâm kết nối xử lý
(Processing Hub) đặt ở Mỹ (tại Redondo và Moline) để từ đó số hiệu chỉnh
được chuyển lên các vệ tinh địa tĩnh của StarFire để thiết lập phạm vi phủ tín
hiệu cải chính trên toàn cầu (hình 3.7).
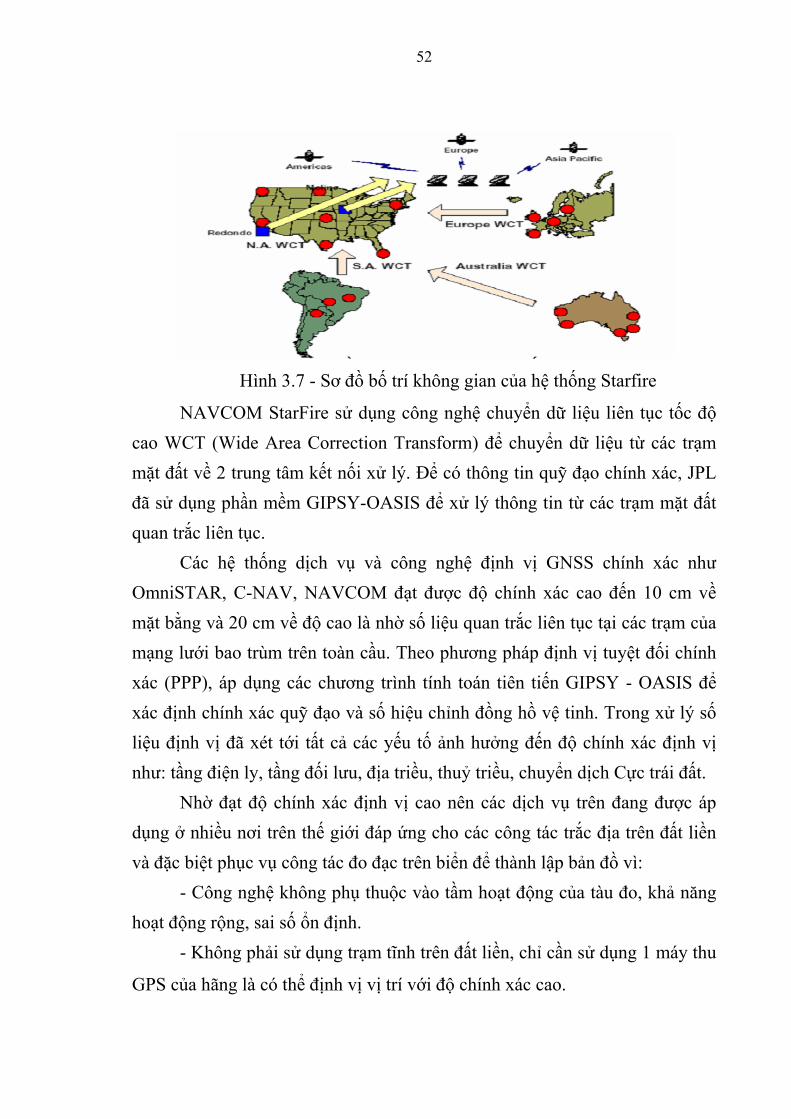
52
Hình 3.7 - Sơ đồ bố trí không gian của hệ thống Starfire
NAVCOM StarFire sử dụng công nghệ chuyển dữ liệu liên tục tốc độ cao WCT (Wide Area Correction Transform) để chuyển dữ liệu từ các trạm mặt đất về 2 trung tâm kết nối xử lý. Để có thông tin quỹ đạo chính xác, JPL đã sử dụng phần mềm GIPSY-OASIS để xử lý thông tin từ các trạm mặt đất quan trắc liên tục.
Các hệ thống dịch vụ và công nghệ định vị GNSS chính xác như OmniSTAR, C-NAV, NAVCOM đạt được độ chính xác cao đến 10 cm về mặt bằng và 20 cm về độ cao là nhờ số liệu quan trắc liên tục tại các trạm của mạng lưới bao trùm trên toàn cầu. Theo phương pháp định vị tuyệt đối chính xác (PPP), áp dụng các chương trình tính toán tiên tiến GIPSY - OASIS để xác định chính xác quỹ đạo và số hiệu chỉnh đồng hồ vệ tinh. Trong xử lý số liệu định vị đã xét tới tất cả các yếu tố ảnh hưởng đến độ chính xác định vị như: tầng điện ly, tầng đối lưu, địa triều, thuỷ triều, chuyển dịch Cực trái đất.
Nhờ đạt độ chính xác định vị cao nên các dịch vụ trên đang được áp dụng ở nhiều nơi trên thế giới đáp ứng cho các công tác trắc địa trên đất liền và đặc biệt phục vụ công tác đo đạc trên biển để thành lập bản đồ vì:
- Công nghệ không phụ thuộc vào tầm hoạt động của tàu đo, khả năng hoạt động rộng, sai số ổn định.
- Không phải sử dụng trạm tĩnh trên đất liền, chỉ cần sử dụng 1 máy thu
GPS của hãng là có thể định vị vị trí với độ chính xác cao.
53
3.2. ỨNG DỤNG MÁY ĐO SÂU HỒI ÂM TRONG ĐO VẼ THÀNH LẬP
BĐĐHĐB
3.2.1. Máy đo sâu hồi âm đơn tia
3.2.1.1. Nguyên lý hoạt động của máy đo sâu hồi âm đơn tia
Máy đo sâu hồi âm đơn tia hoạt động bằng cách chuyển đổi năng lượng từ
các xung ở dạng năng lượng âm thanh thành dạng năng lượng điện từ. Như các bộ
phát sóng, năng lượng sóng âm không truyền theo mọi hướng mà được phát đi
trong nước với dạng một chùm tia theo hướng thẳng đứng. Các xung âm thanh
truyền theo hướng từ trên tầu xuống bề mặt đáy biển, gặp bề mặt đáy biển thì một
phần sẽ bị phản xạ trở lại và một phần bị bức xạ [5].
Gọi khoảng cách giữa bộ phận phát sóng và bộ phận thu là 2l, vận tốc
sóng âm truyền trong nước là V và khoảng thời gian lan truyền của sóng âm
từ bộ phận phát (tầu) xuống đáy biển và phản xạ trở lại là t (hình 3.8), khi đó
công thức lý thuyết để xác định độ sâu là:
( ) 22.21 ltVZ −= (3.4)
Khi ở nơi có độ sâu lớn, hoặc cấu tạo của máy thu và phát đặt trùng
nhau thì công thức trên có thể đơn giản hoá dưới dạng:
tVZ ..21
= (3.5)
Hình 3.8 - Nguyên lý đo đạc của máy đo sâu hồi âm
54
Từ công thức (3.5), muốn xác định được độ sâu cần phải biết vận tốc
của sóng âm và khoảng thời gian lan truyền của sóng âm trong môi trường
nước. Khoảng thời gian lan truyền được xác định chính xác bằng đồng hồ
thạch anh, còn vận tốc sóng âm được xác định bằng các thiết bị đo vận tốc
sóng âm và phụ thuộc vào môđun đàn hồi, mật độ của môi trường nước, hai
yếu tố này lại phụ thuộc vào nhiệt độ, độ mặn và áp lực nước.
Chức năng của thiết bị hiển thị là hiển thị một cách trực quan giá trị của
độ sâu đo được. Hiện nay, có các dạng thiết bị hiển thị sau: máy ghi, máy hiển
thị số, máy in số.
Hình 3.9 - Hình ảnh hiển thị trên màn hình của máy đo sâu
3.2.1.2. Số hiệu chỉnh của máy đo sâu hồi âm Giá trị độ sâu trên màn hình máy đo sâu còn phải thêm vào các số hiệu
chỉnh: Số hiệu chỉnh mớn nước, số hiệu chỉnh đường đáy, số hiệu chỉnh tốc
độ quay, số hiệu chỉnh tốc độ âm thanh và số hiệu chỉnh mức nước.
a. Số hiệu chỉnh mớn nước ΔZL
Thiết bị biến đổi năng lượng của máy đo sâu được lắp đặt theo 2 cách.
Cách thứ nhất, lắp đặt cố định, tức là đem thiết bị biển đổi năng lượng có thể
tích tương đối lớn lắp cố định ở đáy tầu đo đạc; cách thứ hai là treo thiết bị
biến đổi năng lượng có thể tích tương đối nhỏ dễ tháo ra. Bất kỳ loại thiết bị
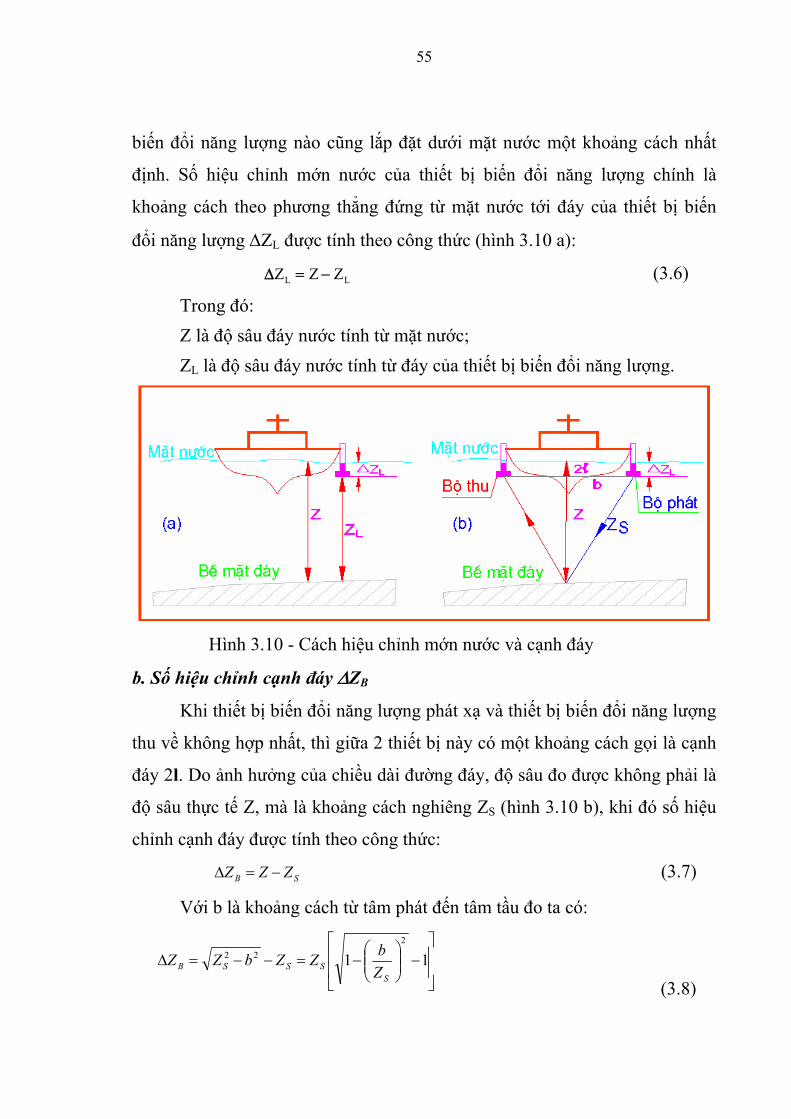
55
biến đổi năng lượng nào cũng lắp đặt dưới mặt nước một khoảng cách nhất
định. Số hiệu chỉnh mớn nước của thiết bị biến đổi năng lượng chính là
khoảng cách theo phương thẳng đứng từ mặt nước tới đáy của thiết bị biến
đổi năng lượng ΔZL được tính theo công thức (hình 3.10 a):
LL ZZZ −=Δ (3.6)
Trong đó: Z là độ sâu đáy nước tính từ mặt nước; ZL là độ sâu đáy nước tính từ đáy của thiết bị biến đổi năng lượng.
Hình 3.10 - Cách hiệu chỉnh mớn nước và cạnh đáy
b. Số hiệu chỉnh cạnh đáy ΔZB
Khi thiết bị biến đổi năng lượng phát xạ và thiết bị biến đổi năng lượng
thu về không hợp nhất, thì giữa 2 thiết bị này có một khoảng cách gọi là cạnh
đáy 2l. Do ảnh hưởng của chiều dài đường đáy, độ sâu đo được không phải là
độ sâu thực tế Z, mà là khoảng cách nghiêng ZS (hình 3.10 b), khi đó số hiệu
chỉnh cạnh đáy được tính theo công thức:
SB ZZZ −=Δ (3.7)
Với b là khoảng cách từ tâm phát đến tâm tầu đo ta có:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=−−=Δ 11
222
SSSSB Z
bZZbZZ
(3.8)
56
Khi 14,0Zb
S
< ảnh hưởng của b rất nhỏ, có thể bỏ qua [44]. Ngược lại,
cần tính số hiệu chỉnh cạnh đáy.
c. Số hiệu chỉnh tốc độ quay ΔZn
Do tốc độ quay thực tế của máy đo sâu và tốc độ quay thiết kế không
giống nhau. Độ sâu ghi được trên thiết bị ghi số phụ thuộc vào tốc độ di động
của kim chỉ thị và thời gian phản xạ của sóng âm. Khi tốc độ di động của kim
thay đổi thì độ sâu đo được cũng thay đổi theo, từ đó sinh ra sai số tốc độ
quay. Số hiệu chỉnh tốc độ quay nZΔ được tính theo công thức:
⎟⎟⎠
⎞⎜⎜⎝
⎛−=Δ 10
SSn n
nZZ (3.9)
Trong đó: n0 là tốc độ quay theo thiết kế và nS là tốc độ quay thực tế.
Khi 0nnS < thì nZΔ có dấu dương;
Khi 0nnS > thì nZΔ có dấu âm.
Ví dụ: máy đo sâu hồi âm SDH - 3 có tốc độ quay ứng với lần đo thứ
nhất n0 = 312 vòng/phút, nếu tốc độ quay thực tế nS = 314 vòng/phút, với ZS=
20m thì nZΔ = - 0,13m, tính được Z:
m87,19ZZZ nS =Δ+=
d. Số hiệu chỉnh tốc độ sóng âm ΔZV
Tốc độ truyền sóng âm trong nước biển là hàm số của nhiệt độ t, độ
mặn S, áp lực tĩnh của nước biển P. Ở những khu vực khác nhau, mùa khác
nhau, những tham số này cũng khác nhau. Nếu tốc độ sóng âm thực tế Vm
không bằng tốc độ thiết kế V0 thì sẽ ảnh hưởng đến độ sâu đo được, do đó cần
đưa vào số hiệu chỉnh tốc độ sóng âm ΔZv:
⎟⎟⎠
⎞⎜⎜⎝
⎛−=Δ 1
0VVZZ m
SV (3.10)
Khi Vm > V0 thì ΔZv có dấu dương;
57
Khi Vm < V0 , ΔZV có dấu âm.
Ví dụ: Với V0= 1500m/s, Vm = 1550 m/s, ZS= 20m, thì ΔZV = 0,67m.
Vì tốc độ sóng âm V là hàm số của t, S, P nên có thể thành lập công
thức thực nghiệm trên cơ sở các số liệu đo thực với khối lượng đủ lớn sao cho
tương đối phù hợp với thực tế. Vận tốc sóng âm trong nước biển thay đổi theo
các yếu tố trên và thường được xác định theo công thức [45]:
p,t,SptS0,35,0 VVVVVV Δ+Δ+Δ+Δ+= (3.11)
Trong đó:
V0,35,0 = 1449,14 m/s là vận tốc tại 00C, độ mặn 35‰ và áp suất khí trong môi trường nước biển p=1,033 kg/cm2; Spt V,V,V ΔΔΔ là số hiệu chỉnh cho nhiệt độ, áp suất tĩnh của nước biển và
độ mặn của nước biển; p,t,SVΔ là số hiệu chỉnh cho sự thay đổi của ba yếu tố trên.
Trong thực tế, đo tốc độ sóng âm tại khu đo ở các độ sâu 0 m, 15 m, 25 m, 35 m, 50 m, 75 m, 100 m, 150 m…, sau đó lấy giá trị trung bình trọng số của các tốc độ sóng âm tại các lớp nước biển để làm tốc độ sóng âm trung bình của nước biển từ mặt biển đến điểm cần đo. e. Số hiệu chỉnh tổng hợp của máy đo sâu Từ những vấn đề nêu ở trên, số hiệu chỉnh tổng hợp của máy đo sâu được tính theo công thức:
VnBL ZZZZZ Δ+Δ+Δ+Δ=Δ (3.12)
Trong 4 số hiệu chỉnh nói trên, số hiệu chỉnh tốc độ sóng âm ΔZV có
ảnh hưởng lớn nhất. Cách tính số hiệu chỉnh này gọi là phương pháp xác định số hiệu chỉnh máy đo sâu theo các thông số của hải văn [4]. Phương pháp này thích hợp cho vùng biển có độ sâu lớn hơn 20 m, đối với vùng biển nông hơn, người ta thường dùng phương pháp so sánh để tìm ra số
hiệu chỉnh tổng hợp ΔZ.
58
Trong phương pháp so sánh, dùng một tấm kiểm tra và một máy thu sóng âm đặt ở một độ sâu nhất định dưới thiết bị biến đổi năng lượng. Dùng thước đo chính xác độ sâu tính đến tấm kiểm tra Z, so sánh với độ sâu ZS của
máy đo sâu đo được ở cùng thời điểm đó. Hiệu số ΔZ = Z - ZS chính là số hiệu chỉnh tổng hợp. Ví dụ dùng thước đo được Z = 15,5 m, dùng máy đo sâu đo được ở cùng thời điểm ZS = 14,5 m thì:
ΔZ = Z - ZS = 1,0 m Trong khi đo thường dùng phương pháp so sánh để kiểm tra máy đo
sâu 1 đến 2 tuần 1 lần. Do đó độ sâu khi hiệu chỉnh chỉ dùng để khống chế tư
liệu đo sâu trong khoảng 1 ÷ 2 tuần đó trên cùng một khu đo.
3.2.2. Nguyên lý cấu tạo và hoạt động của máy đo sâu đa tia
Hệ thống đo sâu hồi âm đa tia MBES (Multibeam echosounder) được
ra đời khoảng những năm 1970 trên cơ sở của máy đo sâu hồi âm đơn tia. Hệ
thống này cho phép xác định chi tiết bề mặt đáy biển từ nhiều tia đơn, kết quả
một lần đo xác định được hàng trăm điểm độ sâu trên một mặt phẳng vuông
góc với đường đi của tàu hoặc cả một dải độ sâu có độ rộng nhất định (mặt
cắt), tổng số các mặt cắt dọc của các kênh tín hiệu có thể tạo ra nhiều lần trên
một giây. Độ rộng dải quét thường lớn gấp từ 2 đến 7 lần độ sâu, góc mở của
chùm tia có thể đạt tới trên 150º và góc kẹp của các tia đơn được tạo ra có thể
nhỏ hơn 1º. Máy đo sâu hồi âm đa tia thường có từ 60 đến 150 tia. Sau khi các
tia âm thanh phản xạ từ đáy biển trở lại bộ phận thu tín hiệu sẽ được xử lý cho
giá trị đo sâu của các điểm đo.
Với công tác đo vẽ BĐĐHĐB ven bờ tỷ lệ lớn, máy đo sâu hồi âm đa
tia MBES (Multibeam echosounder) cho năng suất về thời gian, hiệu quả về
kinh tế và đảm bảo các yêu cầu kỹ thuật.
Các bộ phận chủ yếu của hệ thống đo sâu hồi âm đa tia gồm: hệ thống
thu phát sóng âm thanh, bộ cảm biến, hệ thống tích hợp cảm biến và GPS,
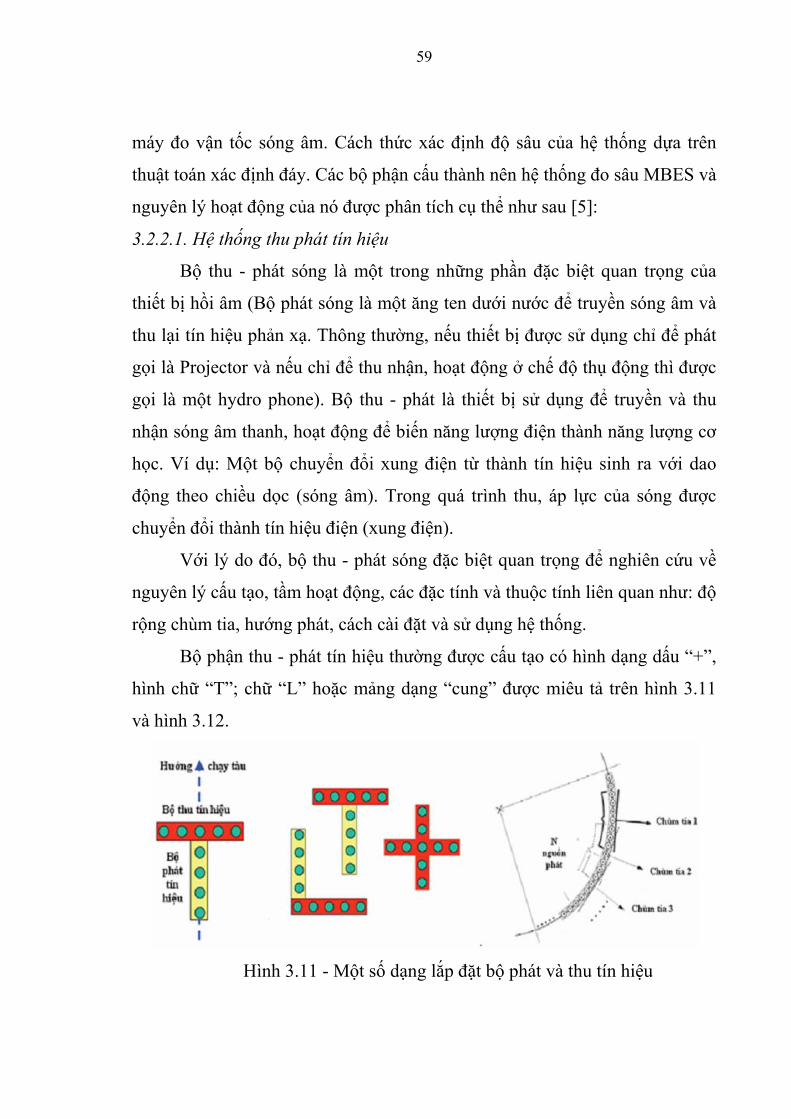
59
máy đo vận tốc sóng âm. Cách thức xác định độ sâu của hệ thống dựa trên
thuật toán xác định đáy. Các bộ phận cấu thành nên hệ thống đo sâu MBES và
nguyên lý hoạt động của nó được phân tích cụ thể như sau [5]:
3.2.2.1. Hệ thống thu phát tín hiệu
Bộ thu - phát sóng là một trong những phần đặc biệt quan trọng của
thiết bị hồi âm (Bộ phát sóng là một ăng ten dưới nước để truyền sóng âm và
thu lại tín hiệu phản xạ. Thông thường, nếu thiết bị được sử dụng chỉ để phát
gọi là Projector và nếu chỉ để thu nhận, hoạt động ở chế độ thụ động thì được
gọi là một hydro phone). Bộ thu - phát là thiết bị sử dụng để truyền và thu
nhận sóng âm thanh, hoạt động để biến năng lượng điện thành năng lượng cơ
học. Ví dụ: Một bộ chuyển đổi xung điện từ thành tín hiệu sinh ra với dao
động theo chiều dọc (sóng âm). Trong quá trình thu, áp lực của sóng được
chuyển đổi thành tín hiệu điện (xung điện).
Với lý do đó, bộ thu - phát sóng đặc biệt quan trọng để nghiên cứu về
nguyên lý cấu tạo, tầm hoạt động, các đặc tính và thuộc tính liên quan như: độ
rộng chùm tia, hướng phát, cách cài đặt và sử dụng hệ thống.
Bộ phận thu - phát tín hiệu thường được cấu tạo có hình dạng dấu “+”,
hình chữ “T”; chữ “L” hoặc mảng dạng “cung” được miêu tả trên hình 3.11
và hình 3.12.
Hình 3.11 - Một số dạng lắp đặt bộ phát và thu tín hiệu
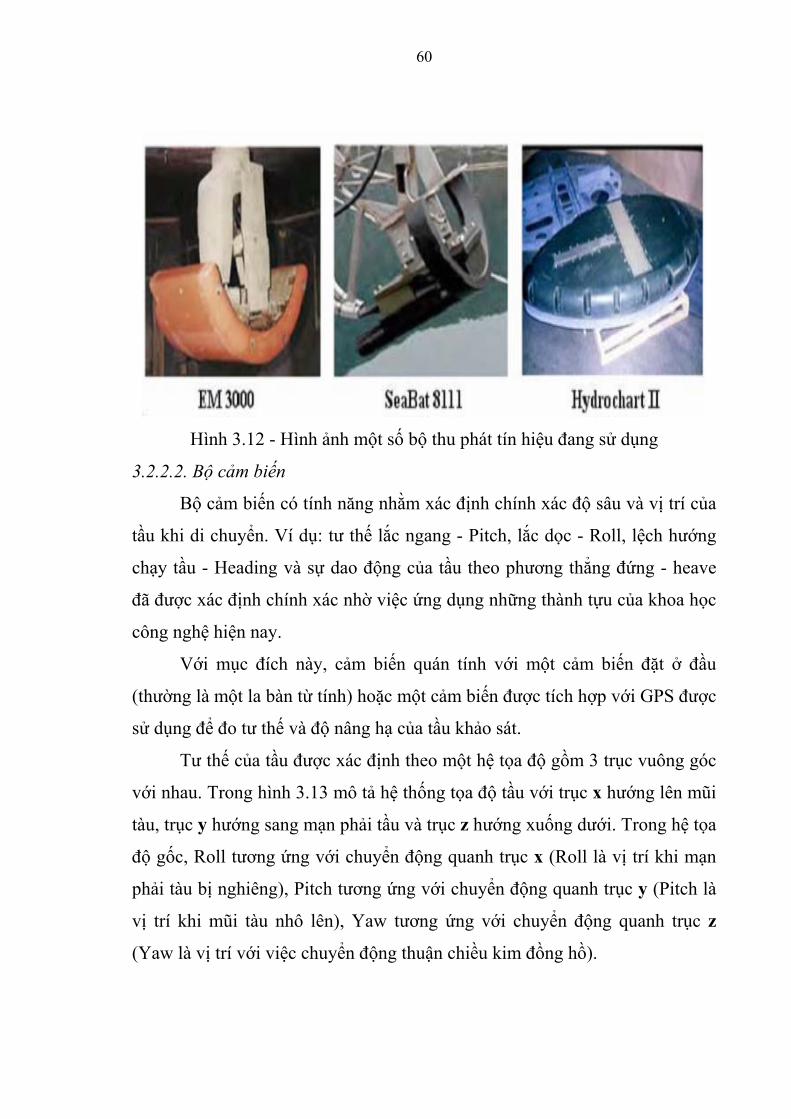
60
Hình 3.12 - Hình ảnh một số bộ thu phát tín hiệu đang sử dụng
3.2.2.2. Bộ cảm biến
Bộ cảm biến có tính năng nhằm xác định chính xác độ sâu và vị trí của
tầu khi di chuyển. Ví dụ: tư thế lắc ngang - Pitch, lắc dọc - Roll, lệch hướng
chạy tầu - Heading và sự dao động của tầu theo phương thẳng đứng - heave
đã được xác định chính xác nhờ việc ứng dụng những thành tựu của khoa học
công nghệ hiện nay.
Với mục đích này, cảm biến quán tính với một cảm biến đặt ở đầu
(thường là một la bàn từ tính) hoặc một cảm biến được tích hợp với GPS được
sử dụng để đo tư thế và độ nâng hạ của tầu khảo sát.
Tư thế của tầu được xác định theo một hệ tọa độ gồm 3 trục vuông góc
với nhau. Trong hình 3.13 mô tả hệ thống tọa độ tầu với trục x hướng lên mũi
tàu, trục y hướng sang mạn phải tầu và trục z hướng xuống dưới. Trong hệ tọa
độ gốc, Roll tương ứng với chuyển động quanh trục x (Roll là vị trí khi mạn
phải tàu bị nghiêng), Pitch tương ứng với chuyển động quanh trục y (Pitch là
vị trí khi mũi tàu nhô lên), Yaw tương ứng với chuyển động quanh trục z
(Yaw là vị trí với việc chuyển động thuận chiều kim đồng hồ).
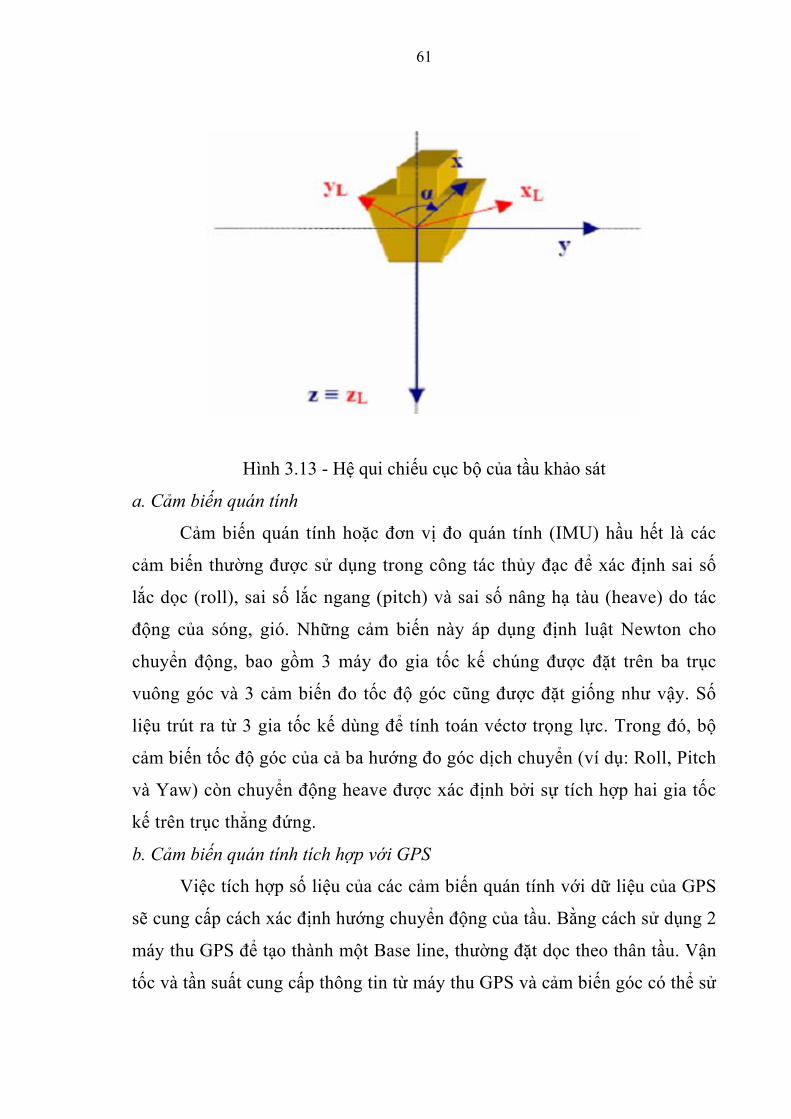
61
Hình 3.13 - Hệ qui chiếu cục bộ của tầu khảo sát
a. Cảm biến quán tính
Cảm biến quán tính hoặc đơn vị đo quán tính (IMU) hầu hết là các
cảm biến thường được sử dụng trong công tác thủy đạc để xác định sai số
lắc dọc (roll), sai số lắc ngang (pitch) và sai số nâng hạ tàu (heave) do tác
động của sóng, gió. Những cảm biến này áp dụng định luật Newton cho
chuyển động, bao gồm 3 máy đo gia tốc kế chúng được đặt trên ba trục
vuông góc và 3 cảm biến đo tốc độ góc cũng được đặt giống như vậy. Số
liệu trút ra từ 3 gia tốc kế dùng để tính toán véctơ trọng lực. Trong đó, bộ
cảm biến tốc độ góc của cả ba hướng đo góc dịch chuyển (ví dụ: Roll, Pitch
và Yaw) còn chuyển động heave được xác định bởi sự tích hợp hai gia tốc
kế trên trục thẳng đứng.
b. Cảm biến quán tính tích hợp với GPS
Việc tích hợp số liệu của các cảm biến quán tính với dữ liệu của GPS
sẽ cung cấp cách xác định hướng chuyển động của tầu. Bằng cách sử dụng 2
máy thu GPS để tạo thành một Base line, thường đặt dọc theo thân tầu. Vận
tốc và tần suất cung cấp thông tin từ máy thu GPS và cảm biến góc có thể sử
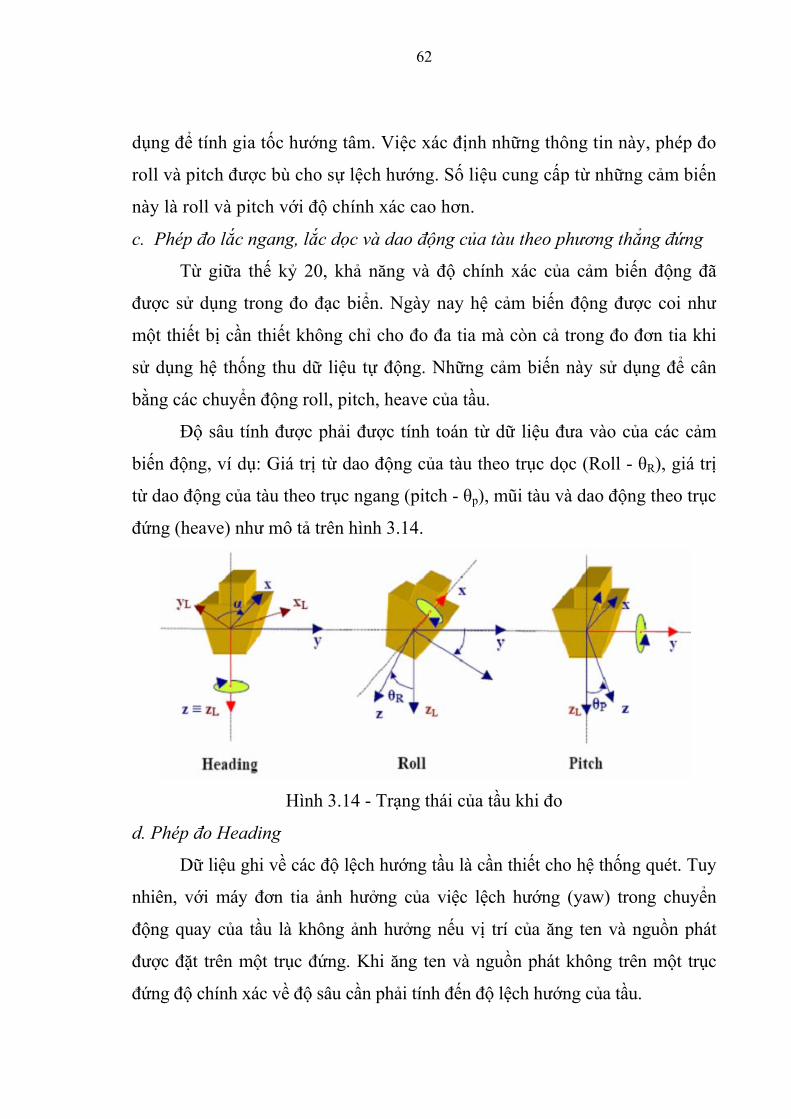
62
dụng để tính gia tốc hướng tâm. Việc xác định những thông tin này, phép đo
roll và pitch được bù cho sự lệch hướng. Số liệu cung cấp từ những cảm biến
này là roll và pitch với độ chính xác cao hơn.
c. Phép đo lắc ngang, lắc dọc và dao động của tàu theo phương thẳng đứng
Từ giữa thế kỷ 20, khả năng và độ chính xác của cảm biến động đã
được sử dụng trong đo đạc biển. Ngày nay hệ cảm biến động được coi như
một thiết bị cần thiết không chỉ cho đo đa tia mà còn cả trong đo đơn tia khi
sử dụng hệ thống thu dữ liệu tự động. Những cảm biến này sử dụng để cân
bằng các chuyển động roll, pitch, heave của tầu.
Độ sâu tính được phải được tính toán từ dữ liệu đưa vào của các cảm
biến động, ví dụ: Giá trị từ dao động của tàu theo trục dọc (Roll - θR), giá trị
từ dao động của tàu theo trục ngang (pitch - θp), mũi tàu và dao động theo trục
đứng (heave) như mô tả trên hình 3.14.
Hình 3.14 - Trạng thái của tầu khi đo
d. Phép đo Heading
Dữ liệu ghi về các độ lệch hướng tầu là cần thiết cho hệ thống quét. Tuy
nhiên, với máy đơn tia ảnh hưởng của việc lệch hướng (yaw) trong chuyển
động quay của tầu là không ảnh hưởng nếu vị trí của ăng ten và nguồn phát
được đặt trên một trục đứng. Khi ăng ten và nguồn phát không trên một trục
đứng độ chính xác về độ sâu cần phải tính đến độ lệch hướng của tầu.
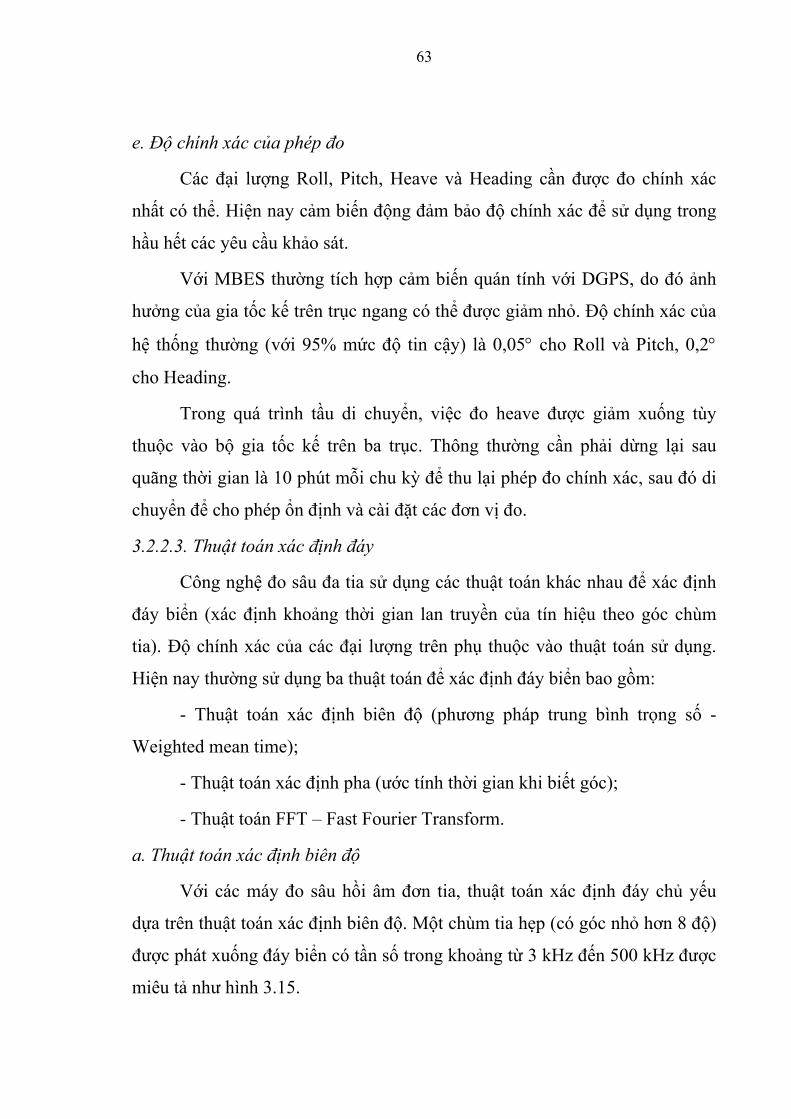
63
e. Độ chính xác của phép đo
Các đại lượng Roll, Pitch, Heave và Heading cần được đo chính xác
nhất có thể. Hiện nay cảm biến động đảm bảo độ chính xác để sử dụng trong
hầu hết các yêu cầu khảo sát.
Với MBES thường tích hợp cảm biến quán tính với DGPS, do đó ảnh
hưởng của gia tốc kế trên trục ngang có thể được giảm nhỏ. Độ chính xác của
hệ thống thường (với 95% mức độ tin cậy) là 0,05° cho Roll và Pitch, 0,2°
cho Heading.
Trong quá trình tầu di chuyển, việc đo heave được giảm xuống tùy
thuộc vào bộ gia tốc kế trên ba trục. Thông thường cần phải dừng lại sau
quãng thời gian là 10 phút mỗi chu kỳ để thu lại phép đo chính xác, sau đó di
chuyển để cho phép ổn định và cài đặt các đơn vị đo.
3.2.2.3. Thuật toán xác định đáy
Công nghệ đo sâu đa tia sử dụng các thuật toán khác nhau để xác định
đáy biển (xác định khoảng thời gian lan truyền của tín hiệu theo góc chùm
tia). Độ chính xác của các đại lượng trên phụ thuộc vào thuật toán sử dụng.
Hiện nay thường sử dụng ba thuật toán để xác định đáy biển bao gồm:
- Thuật toán xác định biên độ (phương pháp trung bình trọng số -
Weighted mean time);
- Thuật toán xác định pha (ước tính thời gian khi biết góc);
- Thuật toán FFT – Fast Fourier Transform.
a. Thuật toán xác định biên độ
Với các máy đo sâu hồi âm đơn tia, thuật toán xác định đáy chủ yếu
dựa trên thuật toán xác định biên độ. Một chùm tia hẹp (có góc nhỏ hơn 8 độ)
được phát xuống đáy biển có tần số trong khoảng từ 3 kHz đến 500 kHz được
miêu tả như hình 3.15.
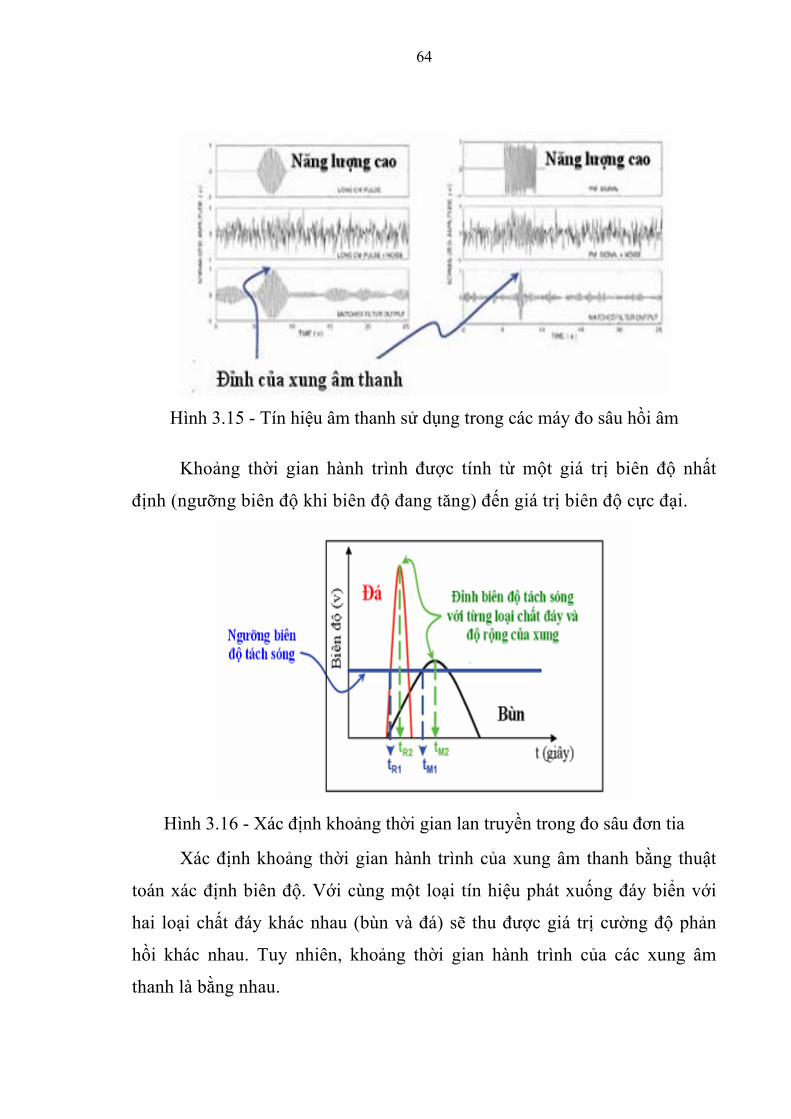
64
Hình 3.15 - Tín hiệu âm thanh sử dụng trong các máy đo sâu hồi âm
Khoảng thời gian hành trình được tính từ một giá trị biên độ nhất
định (ngưỡng biên độ khi biên độ đang tăng) đến giá trị biên độ cực đại.
Hình 3.16 - Xác định khoảng thời gian lan truyền trong đo sâu đơn tia
Xác định khoảng thời gian hành trình của xung âm thanh bằng thuật
toán xác định biên độ. Với cùng một loại tín hiệu phát xuống đáy biển với
hai loại chất đáy khác nhau (bùn và đá) sẽ thu được giá trị cường độ phản
hồi khác nhau. Tuy nhiên, khoảng thời gian hành trình của các xung âm
thanh là bằng nhau.
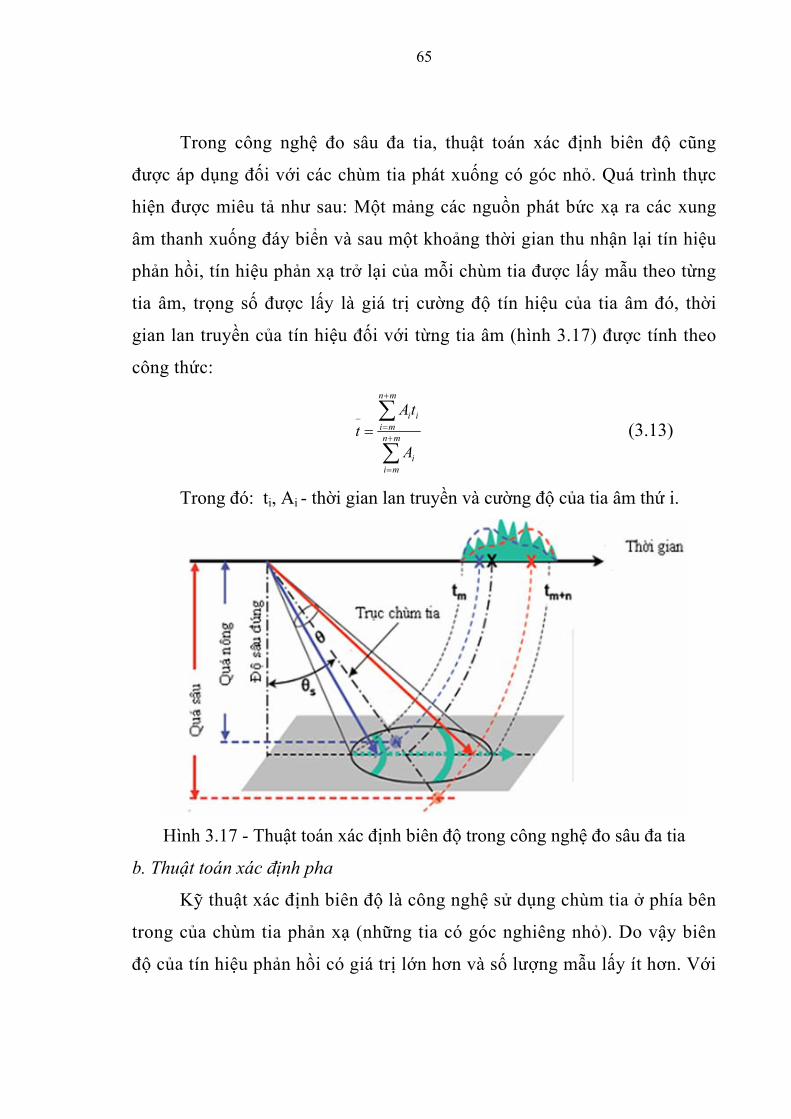
65
Trong công nghệ đo sâu đa tia, thuật toán xác định biên độ cũng
được áp dụng đối với các chùm tia phát xuống có góc nhỏ. Quá trình thực
hiện được miêu tả như sau: Một mảng các nguồn phát bức xạ ra các xung
âm thanh xuống đáy biển và sau một khoảng thời gian thu nhận lại tín hiệu
phản hồi, tín hiệu phản xạ trở lại của mỗi chùm tia được lấy mẫu theo từng
tia âm, trọng số được lấy là giá trị cường độ tín hiệu của tia âm đó, thời
gian lan truyền của tín hiệu đối với từng tia âm (hình 3.17) được tính theo
công thức:
∑
∑+
=
+
=−
= mn
mii
mn
miii
A
tAt (3.13)
Trong đó: ti, Ai - thời gian lan truyền và cường độ của tia âm thứ i.
Hình 3.17 - Thuật toán xác định biên độ trong công nghệ đo sâu đa tia
b. Thuật toán xác định pha
Kỹ thuật xác định biên độ là công nghệ sử dụng chùm tia ở phía bên
trong của chùm tia phản xạ (những tia có góc nghiêng nhỏ). Do vậy biên
độ của tín hiệu phản hồi có giá trị lớn hơn và số lượng mẫu lấy ít hơn. Với
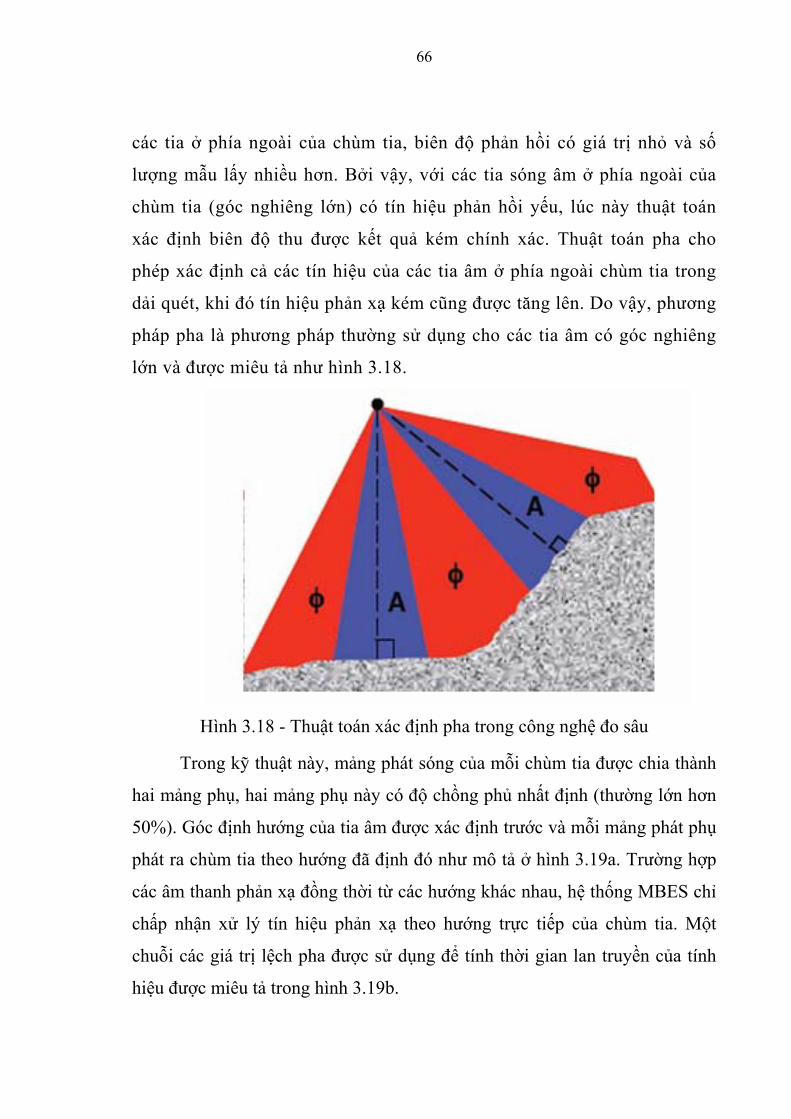
66
các tia ở phía ngoài của chùm tia, biên độ phản hồi có giá trị nhỏ và số
lượng mẫu lấy nhiều hơn. Bởi vậy, với các tia sóng âm ở phía ngoài của
chùm tia (góc nghiêng lớn) có tín hiệu phản hồi yếu, lúc này thuật toán
xác định biên độ thu được kết quả kém chính xác. Thuật toán pha cho
phép xác định cả các tín hiệu của các tia âm ở phía ngoài chùm tia trong
dải quét, khi đó tín hiệu phản xạ kém cũng được tăng lên. Do vậy, phương
pháp pha là phương pháp thường sử dụng cho các tia âm có góc nghiêng
lớn và được miêu tả như hình 3.18.
Hình 3.18 - Thuật toán xác định pha trong công nghệ đo sâu
Trong kỹ thuật này, mảng phát sóng của mỗi chùm tia được chia thành
hai mảng phụ, hai mảng phụ này có độ chồng phủ nhất định (thường lớn hơn
50%). Góc định hướng của tia âm được xác định trước và mỗi mảng phát phụ
phát ra chùm tia theo hướng đã định đó như mô tả ở hình 3.19a. Trường hợp
các âm thanh phản xạ đồng thời từ các hướng khác nhau, hệ thống MBES chỉ
chấp nhận xử lý tín hiệu phản xạ theo hướng trực tiếp của chùm tia. Một
chuỗi các giá trị lệch pha được sử dụng để tính thời gian lan truyền của tính
hiệu được miêu tả trong hình 3.19b.
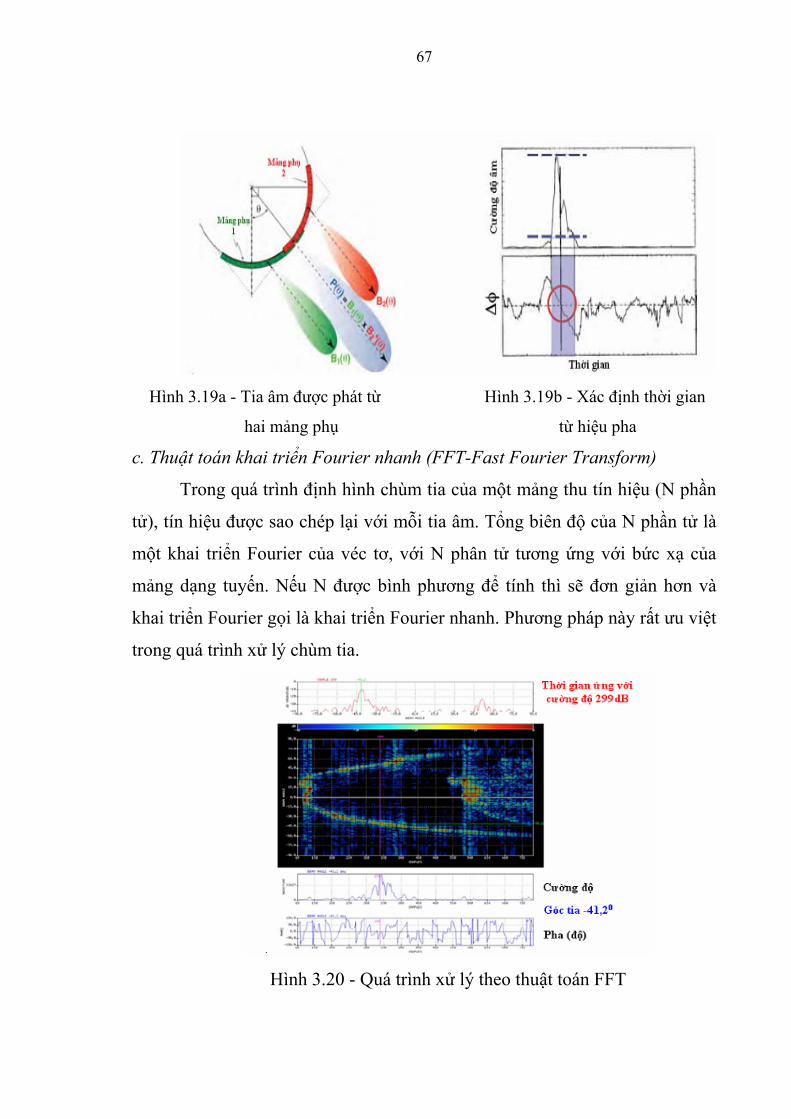
67
Hình 3.19a - Tia âm được phát từ Hình 3.19b - Xác định thời gian
hai mảng phụ từ hiệu pha
c. Thuật toán khai triển Fourier nhanh (FFT-Fast Fourier Transform)
Trong quá trình định hình chùm tia của một mảng thu tín hiệu (N phần
tử), tín hiệu được sao chép lại với mỗi tia âm. Tổng biên độ của N phần tử là
một khai triển Fourier của véc tơ, với N phân tử tương ứng với bức xạ của
mảng dạng tuyến. Nếu N được bình phương để tính thì sẽ đơn giản hơn và
khai triển Fourier gọi là khai triển Fourier nhanh. Phương pháp này rất ưu việt
trong quá trình xử lý chùm tia.
Hình 3.20 - Quá trình xử lý theo thuật toán FFT
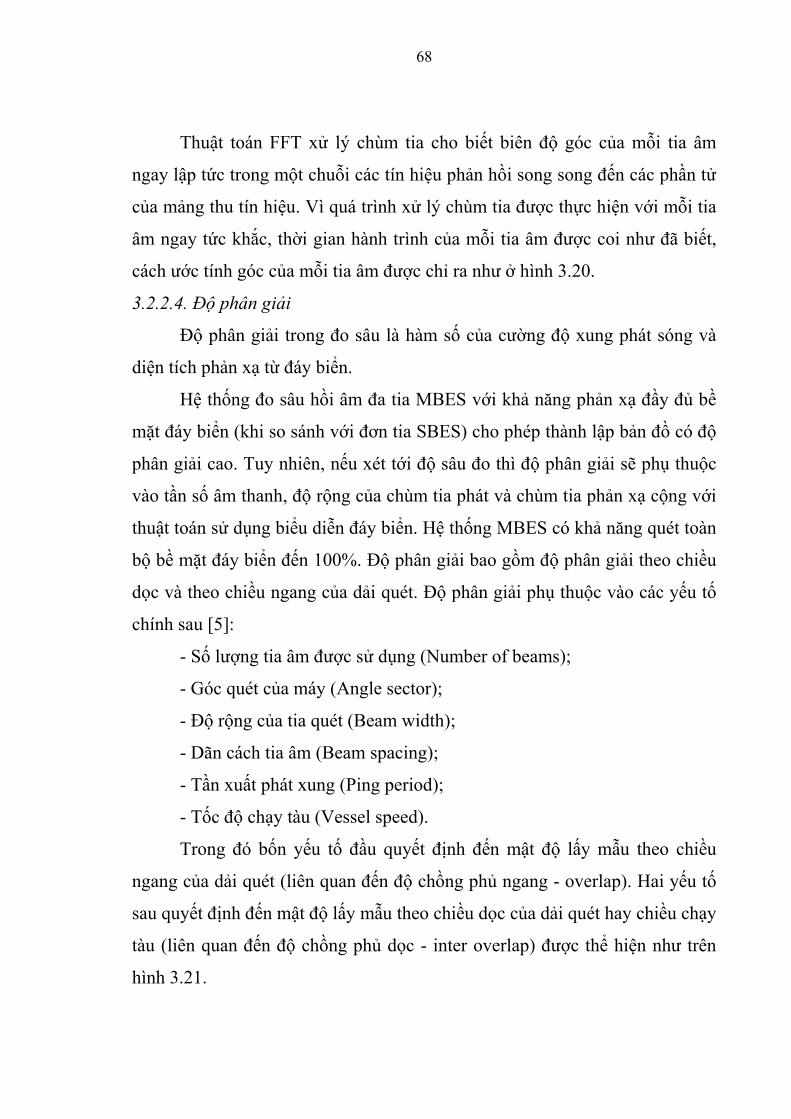
68
Thuật toán FFT xử lý chùm tia cho biết biên độ góc của mỗi tia âm
ngay lập tức trong một chuỗi các tín hiệu phản hồi song song đến các phần tử
của mảng thu tín hiệu. Vì quá trình xử lý chùm tia được thực hiện với mỗi tia
âm ngay tức khắc, thời gian hành trình của mỗi tia âm được coi như đã biết,
cách ước tính góc của mỗi tia âm được chỉ ra như ở hình 3.20.
3.2.2.4. Độ phân giải
Độ phân giải trong đo sâu là hàm số của cường độ xung phát sóng và
diện tích phản xạ từ đáy biển.
Hệ thống đo sâu hồi âm đa tia MBES với khả năng phản xạ đầy đủ bề
mặt đáy biển (khi so sánh với đơn tia SBES) cho phép thành lập bản đồ có độ
phân giải cao. Tuy nhiên, nếu xét tới độ sâu đo thì độ phân giải sẽ phụ thuộc
vào tần số âm thanh, độ rộng của chùm tia phát và chùm tia phản xạ cộng với
thuật toán sử dụng biểu diễn đáy biển. Hệ thống MBES có khả năng quét toàn
bộ bề mặt đáy biển đến 100%. Độ phân giải bao gồm độ phân giải theo chiều
dọc và theo chiều ngang của dải quét. Độ phân giải phụ thuộc vào các yếu tố
chính sau [5]:
- Số lượng tia âm được sử dụng (Number of beams);
- Góc quét của máy (Angle sector);
- Độ rộng của tia quét (Beam width);
- Dãn cách tia âm (Beam spacing);
- Tần xuất phát xung (Ping period);
- Tốc độ chạy tàu (Vessel speed).
Trong đó bốn yếu tố đầu quyết định đến mật độ lấy mẫu theo chiều
ngang của dải quét (liên quan đến độ chồng phủ ngang - overlap). Hai yếu tố
sau quyết định đến mật độ lấy mẫu theo chiều dọc của dải quét hay chiều chạy
tàu (liên quan đến độ chồng phủ dọc - inter overlap) được thể hiện như trên
hình 3.21.
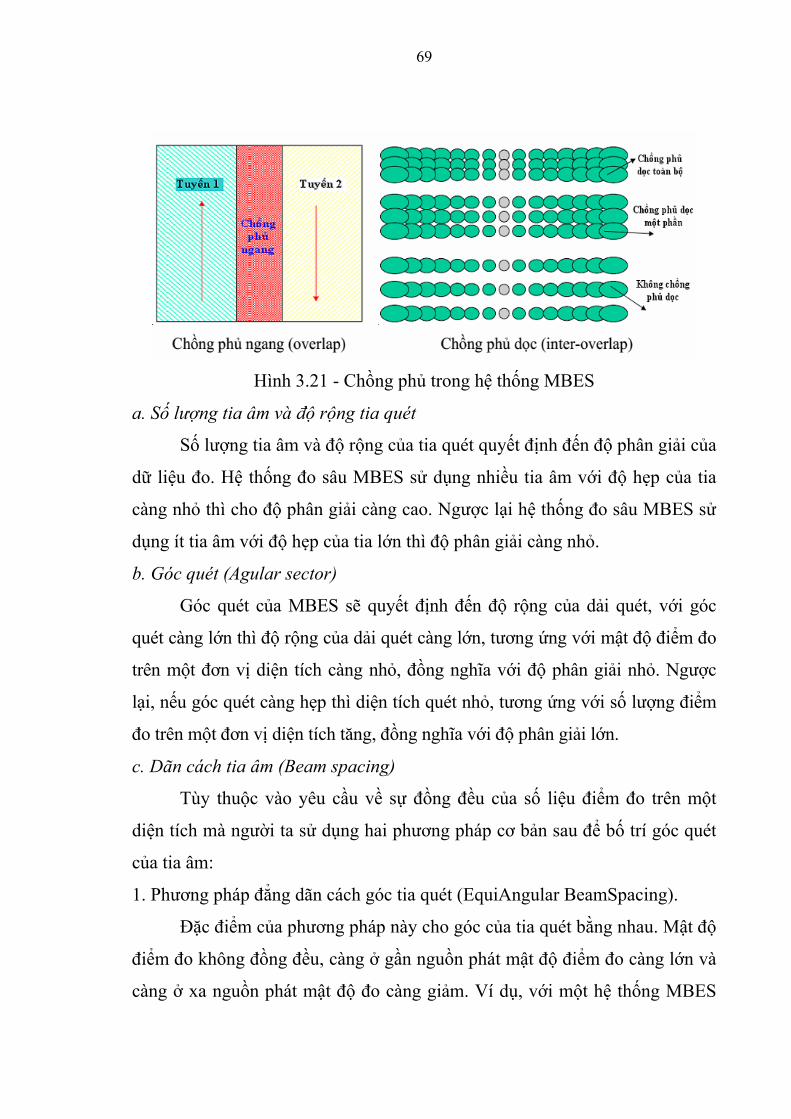
69
Hình 3.21 - Chồng phủ trong hệ thống MBES
a. Số lượng tia âm và độ rộng tia quét
Số lượng tia âm và độ rộng của tia quét quyết định đến độ phân giải của
dữ liệu đo. Hệ thống đo sâu MBES sử dụng nhiều tia âm với độ hẹp của tia
càng nhỏ thì cho độ phân giải càng cao. Ngược lại hệ thống đo sâu MBES sử
dụng ít tia âm với độ hẹp của tia lớn thì độ phân giải càng nhỏ.
b. Góc quét (Agular sector)
Góc quét của MBES sẽ quyết định đến độ rộng của dải quét, với góc
quét càng lớn thì độ rộng của dải quét càng lớn, tương ứng với mật độ điểm đo
trên một đơn vị diện tích càng nhỏ, đồng nghĩa với độ phân giải nhỏ. Ngược
lại, nếu góc quét càng hẹp thì diện tích quét nhỏ, tương ứng với số lượng điểm
đo trên một đơn vị diện tích tăng, đồng nghĩa với độ phân giải lớn.
c. Dãn cách tia âm (Beam spacing)
Tùy thuộc vào yêu cầu về sự đồng đều của số liệu điểm đo trên một
diện tích mà người ta sử dụng hai phương pháp cơ bản sau để bố trí góc quét
của tia âm:
1. Phương pháp đẳng dãn cách góc tia quét (EquiAngular BeamSpacing).
Đặc điểm của phương pháp này cho góc của tia quét bằng nhau. Mật độ
điểm đo không đồng đều, càng ở gần nguồn phát mật độ điểm đo càng lớn và
càng ở xa nguồn phát mật độ đo càng giảm. Ví dụ, với một hệ thống MBES
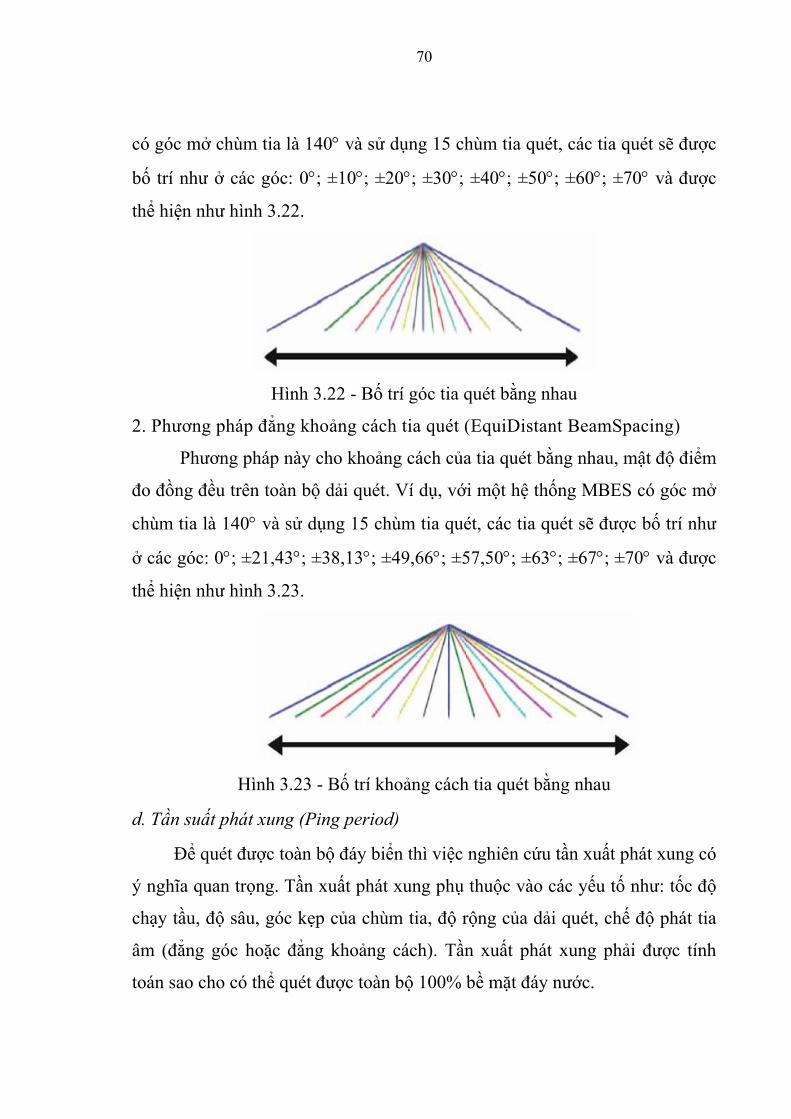
70
có góc mở chùm tia là 140° và sử dụng 15 chùm tia quét, các tia quét sẽ được
bố trí như ở các góc: 0°; ±10°; ±20°; ±30°; ±40°; ±50°; ±60°; ±70° và được
thể hiện như hình 3.22.
Hình 3.22 - Bố trí góc tia quét bằng nhau
2. Phương pháp đẳng khoảng cách tia quét (EquiDistant BeamSpacing)
Phương pháp này cho khoảng cách của tia quét bằng nhau, mật độ điểm
đo đồng đều trên toàn bộ dải quét. Ví dụ, với một hệ thống MBES có góc mở
chùm tia là 140° và sử dụng 15 chùm tia quét, các tia quét sẽ được bố trí như
ở các góc: 0°; ±21,43°; ±38,13°; ±49,66°; ±57,50°; ±63°; ±67°; ±70° và được
thể hiện như hình 3.23.
Hình 3.23 - Bố trí khoảng cách tia quét bằng nhau
d. Tần suất phát xung (Ping period)
Để quét được toàn bộ đáy biển thì việc nghiên cứu tần xuất phát xung có
ý nghĩa quan trọng. Tần xuất phát xung phụ thuộc vào các yếu tố như: tốc độ
chạy tầu, độ sâu, góc kẹp của chùm tia, độ rộng của dải quét, chế độ phát tia
âm (đẳng góc hoặc đẳng khoảng cách). Tần xuất phát xung phải được tính
toán sao cho có thể quét được toàn bộ 100% bề mặt đáy nước.
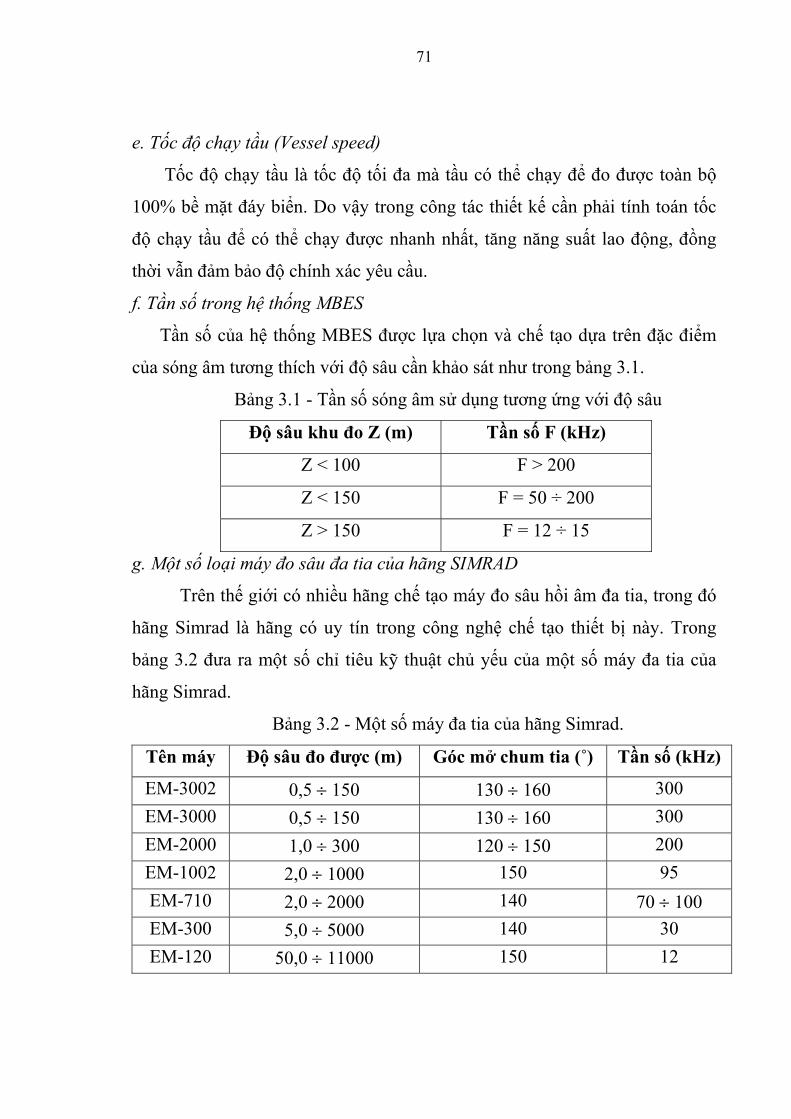
71
e. Tốc độ chạy tầu (Vessel speed)
Tốc độ chạy tầu là tốc độ tối đa mà tầu có thể chạy để đo được toàn bộ
100% bề mặt đáy biển. Do vậy trong công tác thiết kế cần phải tính toán tốc
độ chạy tầu để có thể chạy được nhanh nhất, tăng năng suất lao động, đồng
thời vẫn đảm bảo độ chính xác yêu cầu.
f. Tần số trong hệ thống MBES
Tần số của hệ thống MBES được lựa chọn và chế tạo dựa trên đặc điểm
của sóng âm tương thích với độ sâu cần khảo sát như trong bảng 3.1.
Bảng 3.1 - Tần số sóng âm sử dụng tương ứng với độ sâu
Độ sâu khu đo Z (m) Tần số F (kHz)
Z < 100 F > 200
Z < 150 F = 50 ÷ 200
Z > 150 F = 12 ÷ 15
g. Một số loại máy đo sâu đa tia của hãng SIMRAD
Trên thế giới có nhiều hãng chế tạo máy đo sâu hồi âm đa tia, trong đó
hãng Simrad là hãng có uy tín trong công nghệ chế tạo thiết bị này. Trong
bảng 3.2 đưa ra một số chỉ tiêu kỹ thuật chủ yếu của một số máy đa tia của
hãng Simrad.
Bảng 3.2 - Một số máy đa tia của hãng Simrad.
Tên máy Độ sâu đo được (m) Góc mở chum tia (˚) Tần số (kHz)
EM-3002 0,5 ÷ 150 130 ÷ 160 300 EM-3000 0,5 ÷ 150 130 ÷ 160 300 EM-2000 1,0 ÷ 300 120 ÷ 150 200 EM-1002 2,0 ÷ 1000 150 95 EM-710 2,0 ÷ 2000 140 70 ÷ 100 EM-300 5,0 ÷ 5000 140 30 EM-120 50,0 ÷ 11000 150 12
72
3.3. PHẦN MỀM THƯỜNG DÙNG TRONG ĐO SÂU Ở VIỆT NAM
Nghiên cứu một số phần mềm đo sâu thương mại do các hãng của nước
ngoài xây dựng như: GPSNavX, Fugawi Marine ENC Software, SeaClear,
ScanNav, Tiki Navigator, HyPack, HydroPRO và phần mềm QINSy, quá
trình thu thập dữ liệu đều lưu trữ những kiểu dữ liệu và thông tin chung, đa số
trong những phần mềm trên cùng lưu trữ dữ liệu dưới dạng Database.
Trong đo đạc thành lập BĐĐHĐB ven bờ ở Việt Nam hiện đang phổ
biến sử dụng các phần mềm HyPack của hãng HYPACK Inc, HydroPRO của
hãng Trimble - Hoa Kỳ và phần mềm QINSy của Hà Lan.
3.3.1. Phần mềm HyPack
Phần mềm HyPack được phát triển bởi tập đoàn HYPACK Inc. - Hoa Kỳ.
+ Chức năng: Dẫn đường trong đo đạc và xử lý số liệu.
+ Ưu điểm:
Dễ cài đặt và sử dụng, tốc độ tính toán, xử lý nhanh.
Cấu trúc dữ liệu rõ ràng, kết nối tương thích với nhiều kiểu thiết bị.
+ Nhược điểm:
Không có tính năng cập nhật thông tin khi đo đạc, khả năng kết nối với các
kiểu dữ liệu khác không linh hoạt.
Yêu cầu máy tính phải có cấu hình cao, chỉ hoạt động tốt trên hệ điều hành
Micrsoft Windows 32 bit.
3.3.2. Phần mềm HydroPRO
Phần mềm HydroPRO được phát triển bởi bởi hãng Trimble - Hoa Kỳ.
+ Chức năng: Dẫn đường trong đo đạc và xử lý số liệu;
+ Ưu điểm: Dễ cài đặt và sử dụng, tốc độ tính toán, xử lý nhanh.
Cấu trúc dữ liệu rõ ràng, kết nối tương thích với nhiều kiểu thiết bị, cho
phép cập nhật và quản lý nhiều thông tin trong quá trình đo đạc.
Không yêu cầu máy tính phải có cấu hình cao, hoạt động ổn định và tương
thích với tất cả các phiên bản của hệ điều hành Micrsoft Windows.
73
+ Nhược điểm: Mặc dù cho phép cập nhật thông tin khi đo đạc nhưng
không cung cấp tính năng truy xuất.
3.3.3. Phần mềm QINSy
QPS (Quality positioning services) là một công ty thiết kế phần mềm
độc lập của Hà Lan, được hình thành từ năm 1986. QPS đã thiết kế và lập
phần mềm QINSy bằng ngôn ngữ C++, chạy trong môi trường WINDOWS
XP/NT/2000. QINSy được công nhận ISO-9001 về tiêu chuẩn thiết kế hệ
thống. Phiên bản đầu tiên của QINSy được đưa ra sử dụng từ năm 1997 [1].
+ Chức năng: Dẫn đường trong đo đạc và xử lý số liệu;
+ Ưu điểm: Nhiều tính năng cho công tác định vị, tốc độ tính toán, xử lý
nhanh. Tự động hiệu chỉnh số liêu để tính các độ lệch góc xoay đầu thu phát
của thiết bị, thuận tiện trong việc thu thập số liệu đo đạc khảo sát.
+ Nhược điểm: Còn hạn chế khi xử lý chi tiết số liệu đo sâu đa tia.
Phần mềm QINSy được sử dụng rất rộng rãi do tính năng kết nối dữ
liệu có thể thích hợp với rất nhiều dạng thiết bị đo, song để sử dụng phần
mềm cần phải mua bản quyền sử dụng qua nhà sản xuất.
QINSy được thiết kế và lập theo 2 tiêu chuẩn cho mục đích thu thập dữ
liệu và hiển thị lại dữ liệu:
- QINSy Survey: Cho mục đích sử dụng thời gian thực
- QINSy Office: Cho mục đích xử lý sau và công tác văn phòng
Đối với mục đích thành lập bản đồ, có 2 tiêu chuẩn hệ thống được áp
dụng là: QINSy Mapping and Route Design, QINSy 3D Visualisation Tool.
QINSy có các chức năng sau:
- Phối hợp nhiều loại trị đo khác nhau, có giao diện thiết bị đo kết nối
với máy tính.
- Có thể chạy trên nhiều máy tính và mở nhiều chức năng phần cứng
máy tính đồng thời.
74
- Cung cấp khả năng kiểm tra chất lượng một cách chặt chẽ, áp dụng
kỹ thuật thử (Test) và phương pháp thống kê hiện đại.
- Phù hợp với người sử dụng Microsoft về thao tác trên giao diện.
- Hỗ trợ tất cả cổng giao tiếp nhờ WINDOWS /NT/2000/XP.
Với một dự án đo đạc thành lập BĐĐHĐB QINSy cho phép thực hiện
công việc theo trình tự sau:
1. Chuẩn bị dự án
- Định nghĩa các tham số trắc địa (Hệ quy chiếu, tham số chuyển đổi ...)
- Định nghĩa hệ thống
- Tạo kế hoạch theo tuyến
- Chuyển đổi thông tin dạng DXF
- Tạo một lưới số liệu đo sâu thuỷ âm
2. Lựa chọn và kiểm định
- Lựa chọn hệ thống định vị
- QINSy cho phép kiểm định la bàn con quay, bộ cảm quán tính (IMU)
xác định tình trạng tầu đo (Roll, Pitch, Heave), máy đo sâu hồi âm (đơn
tia, đa tia)
3. Hoạt động trực tuyến
- Thiết kế các tuyến đo
- Xác định tốc độ âm
- Các lựa chọn trực tiếp (thiết bị đo hồi âm, thông tin thuỷ âm...)
- Ghi số liệu đo
- Dẫn đường đo và hỗ trợ cho người lái tầu
4. Xử lý số liệu
- Phân tích số liệu thô
- Trình duyệt cơ sở dữ liệu
- Làm sạch số liệu (lọc nhiễu, lựa chọn lấy bỏ...)
- Sử dụng thông tin nghiệm triều
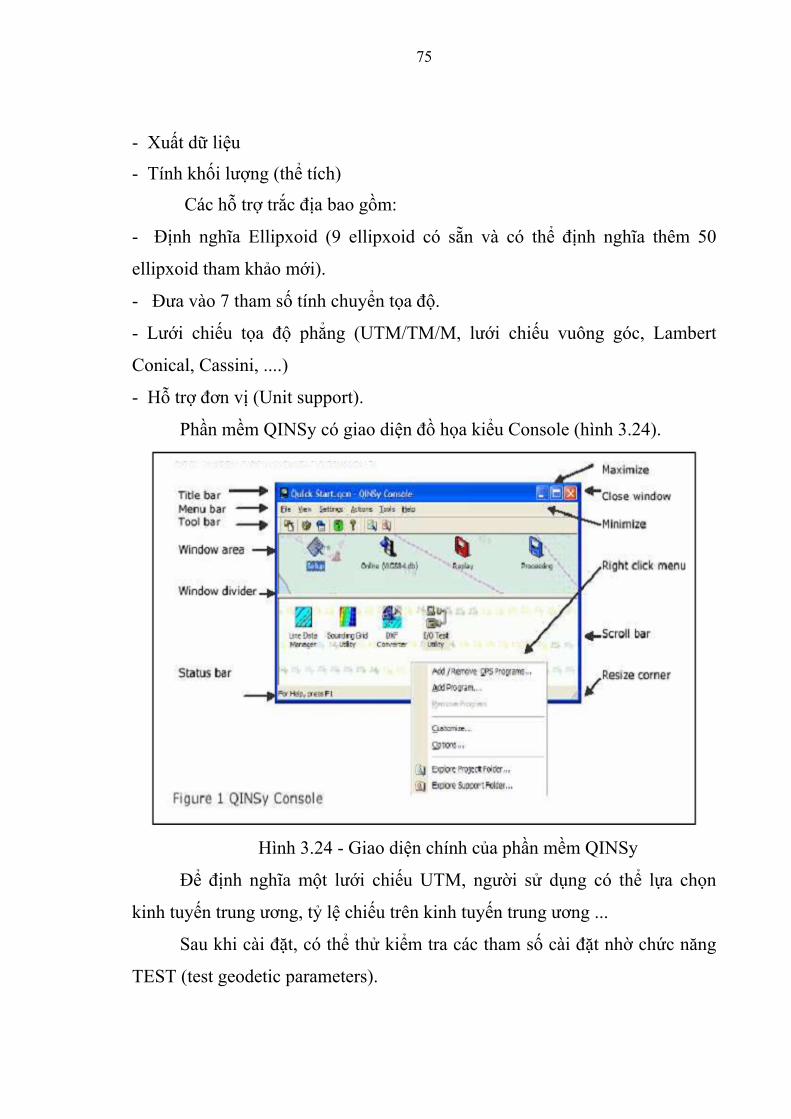
75
- Xuất dữ liệu
- Tính khối lượng (thể tích)
Các hỗ trợ trắc địa bao gồm:
- Định nghĩa Ellipxoid (9 ellipxoid có sẵn và có thể định nghĩa thêm 50
ellipxoid tham khảo mới).
- Đưa vào 7 tham số tính chuyển tọa độ.
- Lưới chiếu tọa độ phẳng (UTM/TM/M, lưới chiếu vuông góc, Lambert
Conical, Cassini, ....)
- Hỗ trợ đơn vị (Unit support).
Phần mềm QINSy có giao diện đồ họa kiểu Console (hình 3.24).
Hình 3.24 - Giao diện chính của phần mềm QINSy
Để định nghĩa một lưới chiếu UTM, người sử dụng có thể lựa chọn
kinh tuyến trung ương, tỷ lệ chiếu trên kinh tuyến trung ương ...
Sau khi cài đặt, có thể thử kiểm tra các tham số cài đặt nhờ chức năng
TEST (test geodetic parameters).
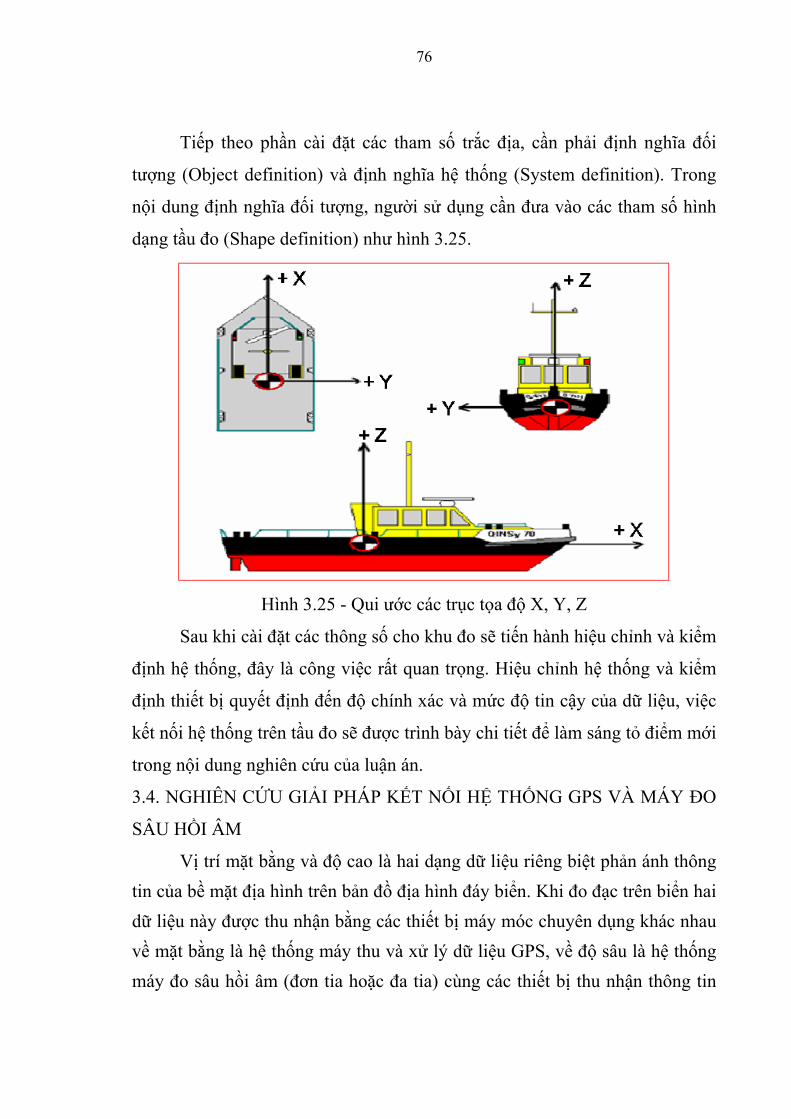
76
Tiếp theo phần cài đặt các tham số trắc địa, cần phải định nghĩa đối
tượng (Object definition) và định nghĩa hệ thống (System definition). Trong
nội dung định nghĩa đối tượng, người sử dụng cần đưa vào các tham số hình
dạng tầu đo (Shape definition) như hình 3.25.
Hình 3.25 - Qui ước các trục tọa độ X, Y, Z
Sau khi cài đặt các thông số cho khu đo sẽ tiến hành hiệu chỉnh và kiểm
định hệ thống, đây là công việc rất quan trọng. Hiệu chỉnh hệ thống và kiểm
định thiết bị quyết định đến độ chính xác và mức độ tin cậy của dữ liệu, việc
kết nối hệ thống trên tầu đo sẽ được trình bày chi tiết để làm sáng tỏ điểm mới
trong nội dung nghiên cứu của luận án.
3.4. NGHIÊN CỨU GIẢI PHÁP KẾT NỐI HỆ THỐNG GPS VÀ MÁY ĐO
SÂU HỒI ÂM
Vị trí mặt bằng và độ cao là hai dạng dữ liệu riêng biệt phản ánh thông tin của bề mặt địa hình trên bản đồ địa hình đáy biển. Khi đo đạc trên biển hai dữ liệu này được thu nhận bằng các thiết bị máy móc chuyên dụng khác nhau về mặt bằng là hệ thống máy thu và xử lý dữ liệu GPS, về độ sâu là hệ thống máy đo sâu hồi âm (đơn tia hoặc đa tia) cùng các thiết bị thu nhận thông tin
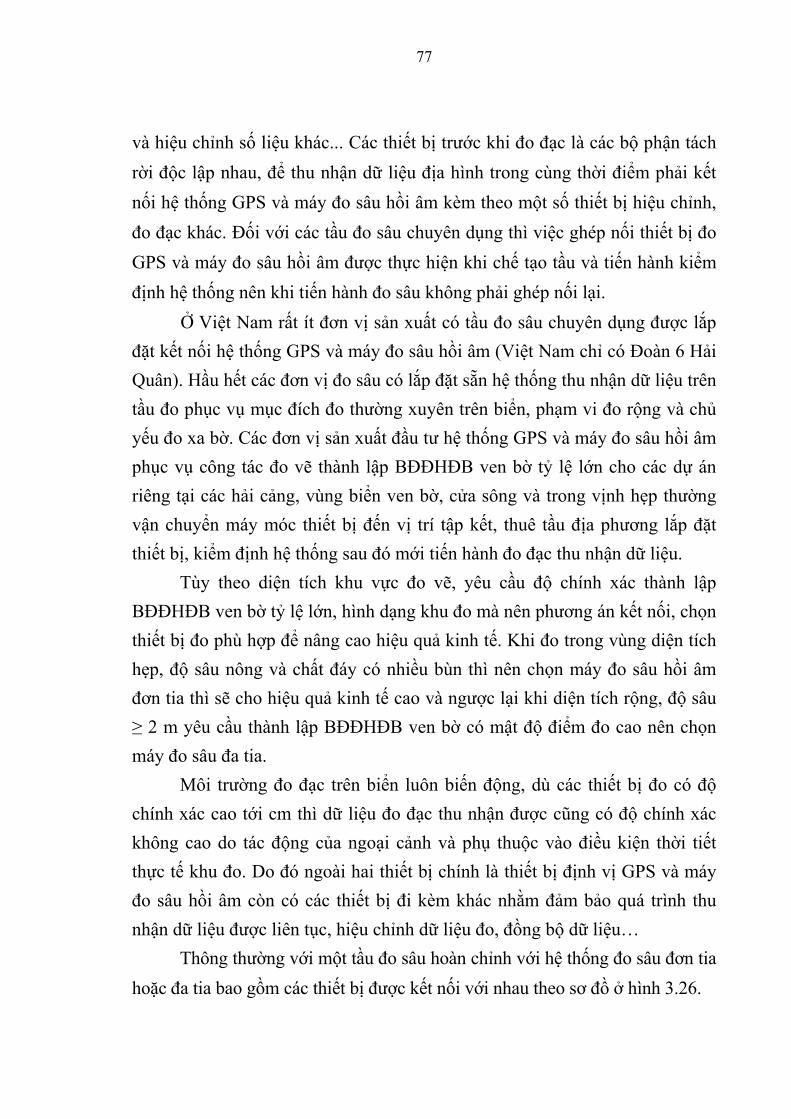
77
và hiệu chỉnh số liệu khác... Các thiết bị trước khi đo đạc là các bộ phận tách rời độc lập nhau, để thu nhận dữ liệu địa hình trong cùng thời điểm phải kết nối hệ thống GPS và máy đo sâu hồi âm kèm theo một số thiết bị hiệu chỉnh, đo đạc khác. Đối với các tầu đo sâu chuyên dụng thì việc ghép nối thiết bị đo GPS và máy đo sâu hồi âm được thực hiện khi chế tạo tầu và tiến hành kiểm định hệ thống nên khi tiến hành đo sâu không phải ghép nối lại.
Ở Việt Nam rất ít đơn vị sản xuất có tầu đo sâu chuyên dụng được lắp đặt kết nối hệ thống GPS và máy đo sâu hồi âm (Việt Nam chỉ có Đoàn 6 Hải Quân). Hầu hết các đơn vị đo sâu có lắp đặt sẵn hệ thống thu nhận dữ liệu trên tầu đo phục vụ mục đích đo thường xuyên trên biển, phạm vi đo rộng và chủ yếu đo xa bờ. Các đơn vị sản xuất đầu tư hệ thống GPS và máy đo sâu hồi âm phục vụ công tác đo vẽ thành lập BĐĐHĐB ven bờ tỷ lệ lớn cho các dự án riêng tại các hải cảng, vùng biển ven bờ, cửa sông và trong vịnh hẹp thường vận chuyển máy móc thiết bị đến vị trí tập kết, thuê tầu địa phương lắp đặt thiết bị, kiểm định hệ thống sau đó mới tiến hành đo đạc thu nhận dữ liệu.
Tùy theo diện tích khu vực đo vẽ, yêu cầu độ chính xác thành lập BĐĐHĐB ven bờ tỷ lệ lớn, hình dạng khu đo mà nên phương án kết nối, chọn thiết bị đo phù hợp để nâng cao hiệu quả kinh tế. Khi đo trong vùng diện tích hẹp, độ sâu nông và chất đáy có nhiều bùn thì nên chọn máy đo sâu hồi âm đơn tia thì sẽ cho hiệu quả kinh tế cao và ngược lại khi diện tích rộng, độ sâu ≥ 2 m yêu cầu thành lập BĐĐHĐB ven bờ có mật độ điểm đo cao nên chọn máy đo sâu đa tia.
Môi trường đo đạc trên biển luôn biến động, dù các thiết bị đo có độ chính xác cao tới cm thì dữ liệu đo đạc thu nhận được cũng có độ chính xác không cao do tác động của ngoại cảnh và phụ thuộc vào điều kiện thời tiết thực tế khu đo. Do đó ngoài hai thiết bị chính là thiết bị định vị GPS và máy đo sâu hồi âm còn có các thiết bị đi kèm khác nhằm đảm bảo quá trình thu nhận dữ liệu được liên tục, hiệu chỉnh dữ liệu đo, đồng bộ dữ liệu…
Thông thường với một tầu đo sâu hoàn chỉnh với hệ thống đo sâu đơn tia hoặc đa tia bao gồm các thiết bị được kết nối với nhau theo sơ đồ ở hình 3.26.
78
Kết nối nguồn điện
Cổng kết nối đầu vào Hình 3.26 - Sơ đồ kết nối hệ thống đo sâu đơn tia hoặc đa tia
Các thiết bị phải được lắp đặt cố định, chắc chắn và tuân thủ các hướng dẫn của từng loại thiết bị tại vị trí thích hợp nhất trên tầu đo và cần chú ý:
- Ăng ten máy định vị cần đặt ở nơi thông thoáng, tránh được các nhiễu do sóng điện từ, các ảnh hưởng đa tuyến (multipath).
- La bàn cần được lắp đặt chắc chắn trên mặt bằng phẳng sao cho hướng la bàn chỉ đúng hướng thực của tầu. Với la bàn vệ tinh thì 2 ăng ten phải được lắp đặt như ăng ten máy định vị và trên cùng một mặt phẳng ngang. Nên lắp dọc theo tầu (để đo được lắc dọc – Pitch) hoặc ngang theo tầu (để đo được lắc ngang – nghiêng ngang).
- Bộ cảm biến của máy cải chính sóng cần được đặt càng gần trọng tâm của tầu càng tốt. Chú ý lắp đúng hướng và đảm bảo được mặt phẳng ngang cho máy để giảm tối đa các sai lệch hệ thống do lắp đặt gây ra.
- Các đầu phát, thu sóng âm của máy đo sâu đa tia phải được lắp đặt thật chắc chắn, đúng hướng yêu cầu tại vị trí tránh nhiễu âm tốt nhất trên tầu đo.
- Máy đo tốc độ âm trực tuyến được lắp ngay tại đầu biến âm của hệ thống.
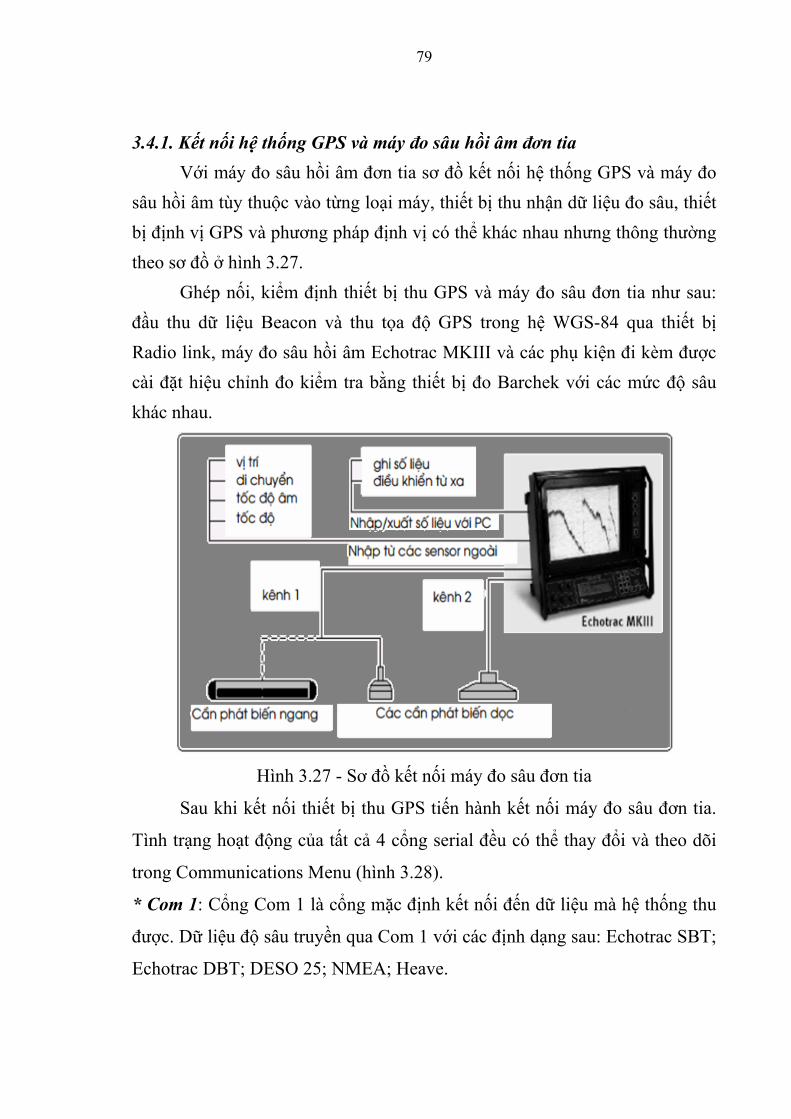
79
3.4.1. Kết nối hệ thống GPS và máy đo sâu hồi âm đơn tia Với máy đo sâu hồi âm đơn tia sơ đồ kết nối hệ thống GPS và máy đo sâu hồi âm tùy thuộc vào từng loại máy, thiết bị thu nhận dữ liệu đo sâu, thiết bị định vị GPS và phương pháp định vị có thể khác nhau nhưng thông thường theo sơ đồ ở hình 3.27.
Ghép nối, kiểm định thiết bị thu GPS và máy đo sâu đơn tia như sau: đầu thu dữ liệu Beacon và thu tọa độ GPS trong hệ WGS-84 qua thiết bị Radio link, máy đo sâu hồi âm Echotrac MKIII và các phụ kiện đi kèm được cài đặt hiệu chỉnh đo kiểm tra bằng thiết bị đo Barchek với các mức độ sâu khác nhau.
Hình 3.27 - Sơ đồ kết nối máy đo sâu đơn tia
Sau khi kết nối thiết bị thu GPS tiến hành kết nối máy đo sâu đơn tia.
Tình trạng hoạt động của tất cả 4 cổng serial đều có thể thay đổi và theo dõi
trong Communications Menu (hình 3.28).
* Com 1: Cổng Com 1 là cổng mặc định kết nối đến dữ liệu mà hệ thống thu
được. Dữ liệu độ sâu truyền qua Com 1 với các định dạng sau: Echotrac SBT;
Echotrac DBT; DESO 25; NMEA; Heave.
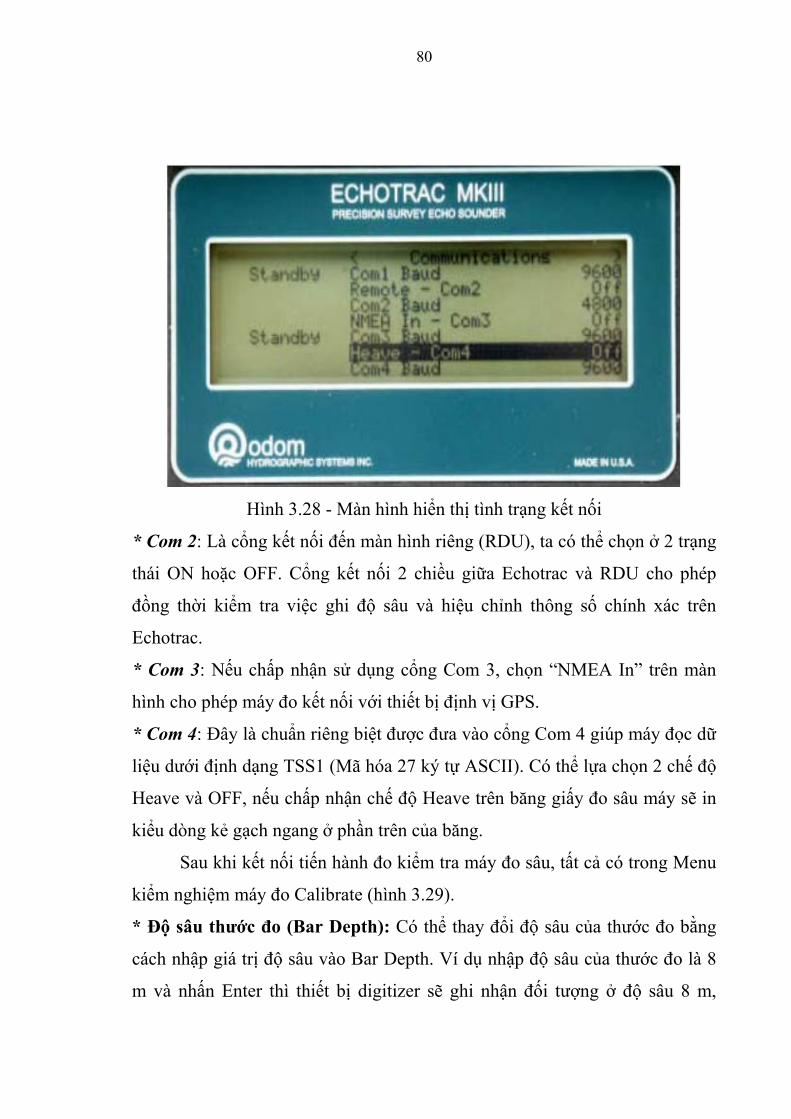
80
Hình 3.28 - Màn hình hiển thị tình trạng kết nối
* Com 2: Là cổng kết nối đến màn hình riêng (RDU), ta có thể chọn ở 2 trạng
thái ON hoặc OFF. Cổng kết nối 2 chiều giữa Echotrac và RDU cho phép
đồng thời kiểm tra việc ghi độ sâu và hiệu chỉnh thông số chính xác trên
Echotrac.
* Com 3: Nếu chấp nhận sử dụng cổng Com 3, chọn “NMEA In” trên màn
hình cho phép máy đo kết nối với thiết bị định vị GPS.
* Com 4: Đây là chuẩn riêng biệt được đưa vào cổng Com 4 giúp máy đọc dữ
liệu dưới định dạng TSS1 (Mã hóa 27 ký tự ASCII). Có thể lựa chọn 2 chế độ
Heave và OFF, nếu chấp nhận chế độ Heave trên băng giấy đo sâu máy sẽ in
kiểu dòng kẻ gạch ngang ở phần trên của băng.
Sau khi kết nối tiến hành đo kiểm tra máy đo sâu, tất cả có trong Menu
kiểm nghiệm máy đo Calibrate (hình 3.29).
* Độ sâu thước đo (Bar Depth): Có thể thay đổi độ sâu của thước đo bằng
cách nhập giá trị độ sâu vào Bar Depth. Ví dụ nhập độ sâu của thước đo là 8
m và nhấn Enter thì thiết bị digitizer sẽ ghi nhận đối tượng ở độ sâu 8 m,
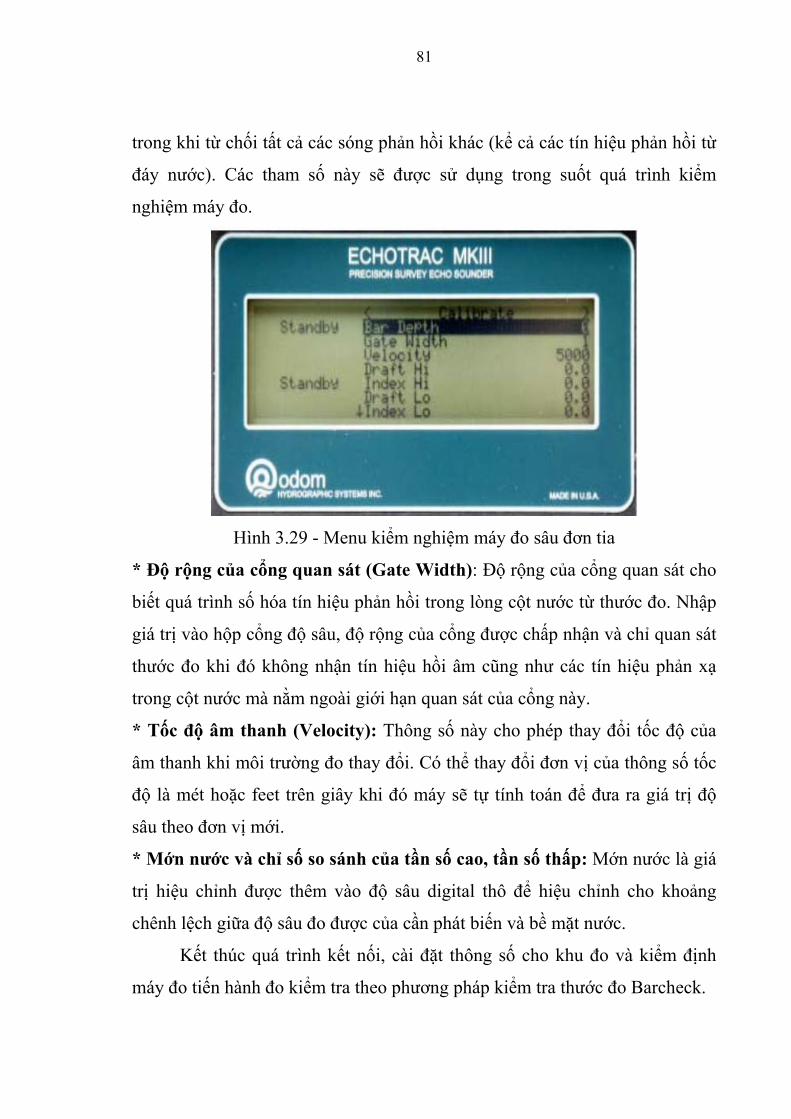
81
trong khi từ chối tất cả các sóng phản hồi khác (kể cả các tín hiệu phản hồi từ
đáy nước). Các tham số này sẽ được sử dụng trong suốt quá trình kiểm
nghiệm máy đo.
Hình 3.29 - Menu kiểm nghiệm máy đo sâu đơn tia
* Độ rộng của cổng quan sát (Gate Width): Độ rộng của cổng quan sát cho
biết quá trình số hóa tín hiệu phản hồi trong lòng cột nước từ thước đo. Nhập
giá trị vào hộp cổng độ sâu, độ rộng của cổng được chấp nhận và chỉ quan sát
thước đo khi đó không nhận tín hiệu hồi âm cũng như các tín hiệu phản xạ
trong cột nước mà nằm ngoài giới hạn quan sát của cổng này.
* Tốc độ âm thanh (Velocity): Thông số này cho phép thay đổi tốc độ của
âm thanh khi môi trường đo thay đổi. Có thể thay đổi đơn vị của thông số tốc
độ là mét hoặc feet trên giây khi đó máy sẽ tự tính toán để đưa ra giá trị độ
sâu theo đơn vị mới.
* Mớn nước và chỉ số so sánh của tần số cao, tần số thấp: Mớn nước là giá
trị hiệu chỉnh được thêm vào độ sâu digital thô để hiệu chỉnh cho khoảng
chênh lệch giữa độ sâu đo được của cần phát biến và bề mặt nước.
Kết thúc quá trình kết nối, cài đặt thông số cho khu đo và kiểm định
máy đo tiến hành đo kiểm tra theo phương pháp kiểm tra thước đo Barcheck.
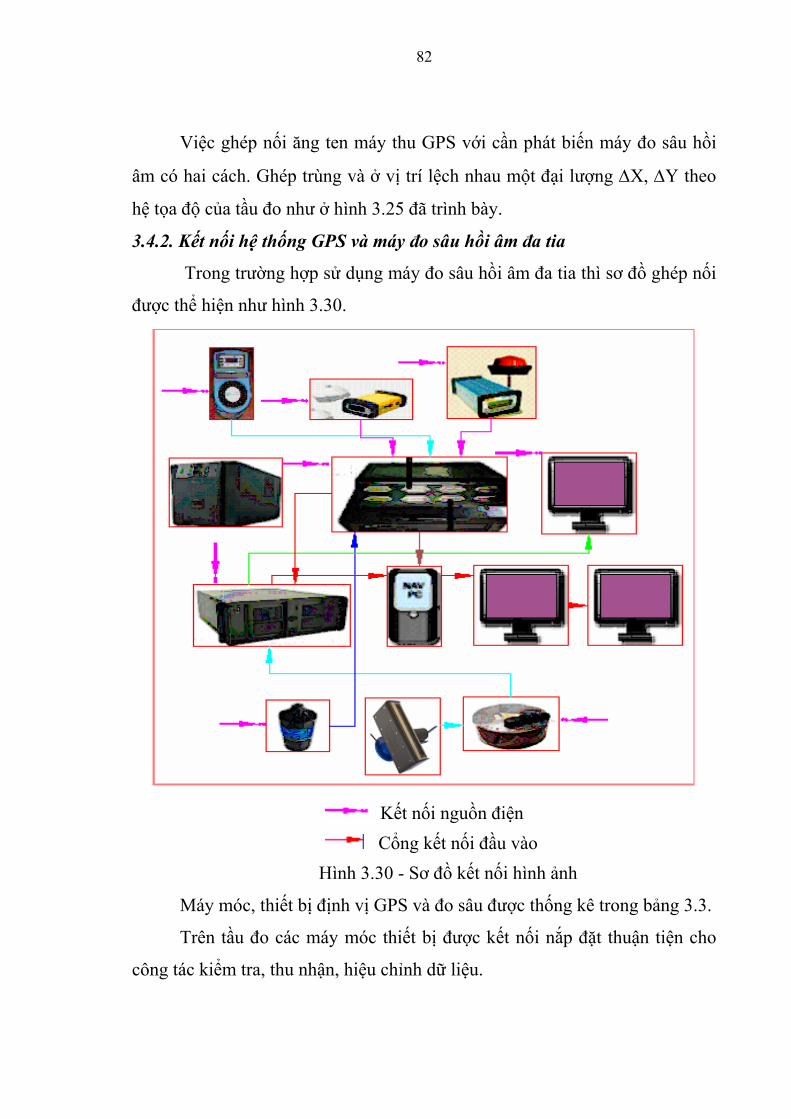
82
Việc ghép nối ăng ten máy thu GPS với cần phát biến máy đo sâu hồi
âm có hai cách. Ghép trùng và ở vị trí lệch nhau một đại lượng ΔX, ΔY theo
hệ tọa độ của tầu đo như ở hình 3.25 đã trình bày.
3.4.2. Kết nối hệ thống GPS và máy đo sâu hồi âm đa tia
Trong trường hợp sử dụng máy đo sâu hồi âm đa tia thì sơ đồ ghép nối
được thể hiện như hình 3.30.
Kết nối nguồn điện
Cổng kết nối đầu vào Hình 3.30 - Sơ đồ kết nối hình ảnh
Máy móc, thiết bị định vị GPS và đo sâu được thống kê trong bảng 3.3.
Trên tầu đo các máy móc thiết bị được kết nối nắp đặt thuận tiện cho
công tác kiểm tra, thu nhận, hiệu chỉnh dữ liệu.
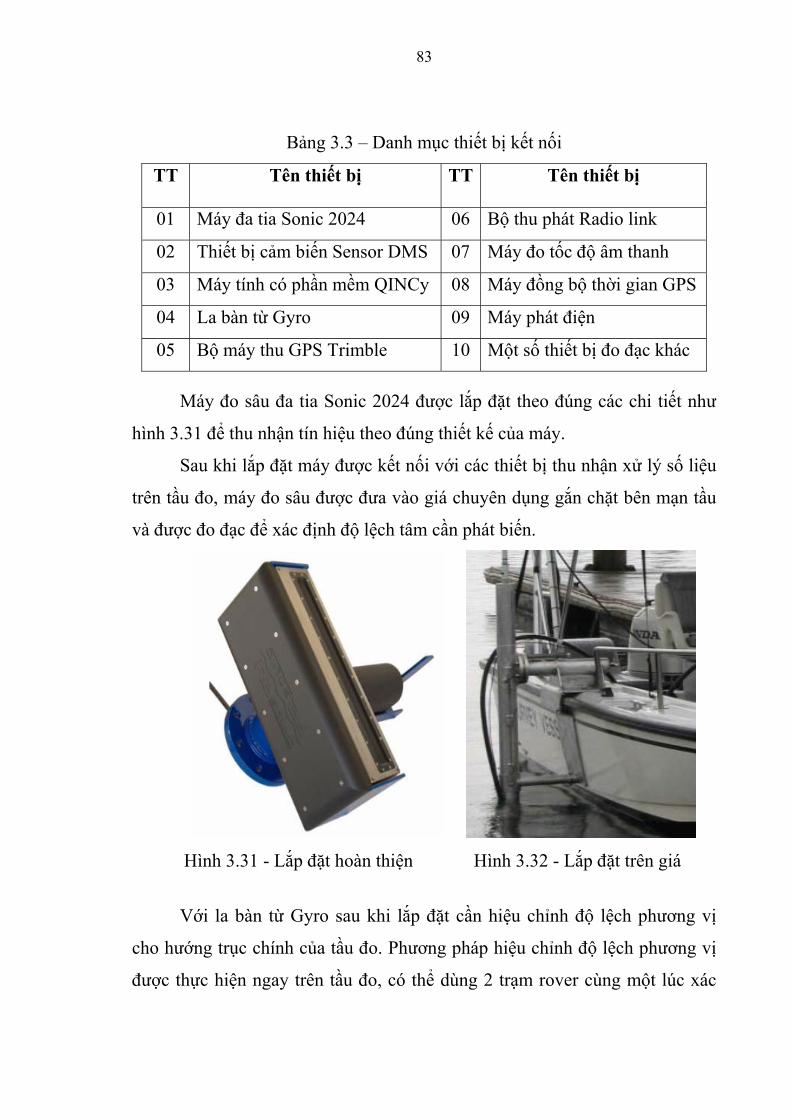
83
Bảng 3.3 – Danh mục thiết bị kết nối
TT Tên thiết bị TT Tên thiết bị
01 Máy đa tia Sonic 2024 06 Bộ thu phát Radio link
02 Thiết bị cảm biến Sensor DMS 07 Máy đo tốc độ âm thanh
03 Máy tính có phần mềm QINCy 08 Máy đồng bộ thời gian GPS
04 La bàn từ Gyro 09 Máy phát điện
05 Bộ máy thu GPS Trimble 10 Một số thiết bị đo đạc khác
Máy đo sâu đa tia Sonic 2024 được lắp đặt theo đúng các chi tiết như
hình 3.31 để thu nhận tín hiệu theo đúng thiết kế của máy.
Sau khi lắp đặt máy được kết nối với các thiết bị thu nhận xử lý số liệu
trên tầu đo, máy đo sâu được đưa vào giá chuyên dụng gắn chặt bên mạn tầu
và được đo đạc để xác định độ lệch tâm cần phát biến.
Hình 3.31 - Lắp đặt hoàn thiện Hình 3.32 - Lắp đặt trên giá
Với la bàn từ Gyro sau khi lắp đặt cần hiệu chỉnh độ lệch phương vị
cho hướng trục chính của tầu đo. Phương pháp hiệu chỉnh độ lệch phương vị
được thực hiện ngay trên tầu đo, có thể dùng 2 trạm rover cùng một lúc xác
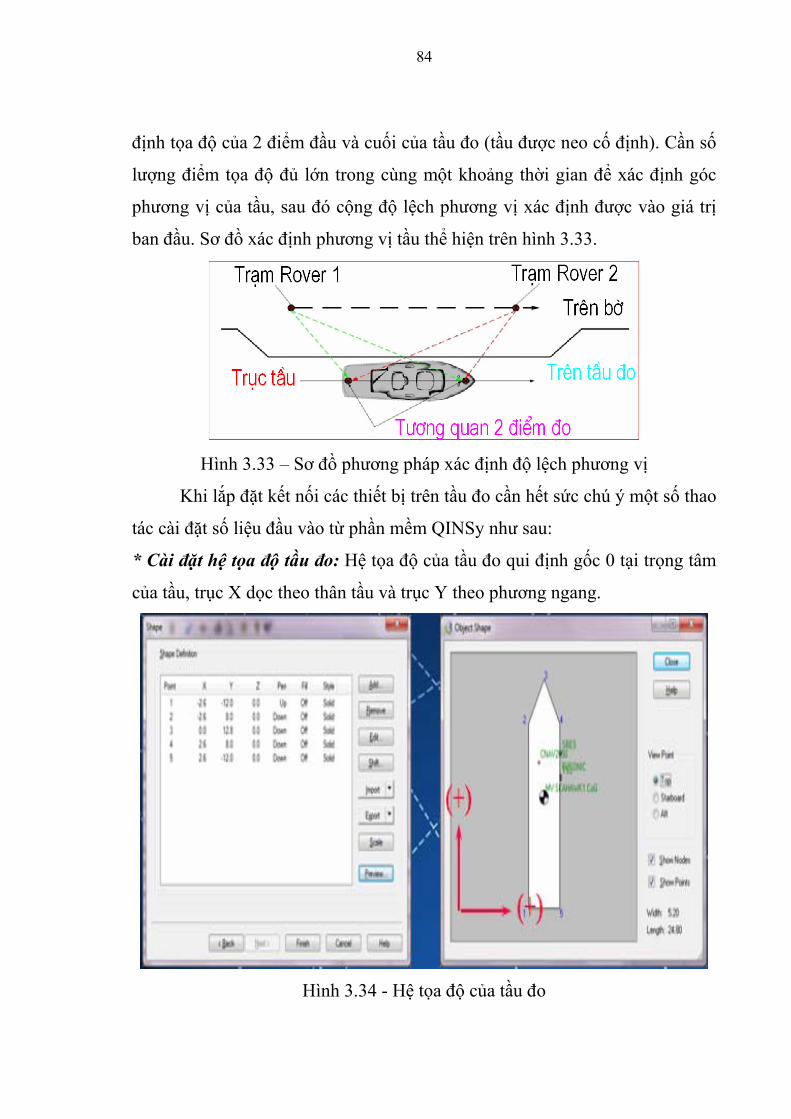
84
định tọa độ của 2 điểm đầu và cuối của tầu đo (tầu được neo cố định). Cần số
lượng điểm tọa độ đủ lớn trong cùng một khoảng thời gian để xác định góc
phương vị của tầu, sau đó cộng độ lệch phương vị xác định được vào giá trị
ban đầu. Sơ đồ xác định phương vị tầu thể hiện trên hình 3.33.
Hình 3.33 – Sơ đồ phương pháp xác định độ lệch phương vị
Khi lắp đặt kết nối các thiết bị trên tầu đo cần hết sức chú ý một số thao
tác cài đặt số liệu đầu vào từ phần mềm QINSy như sau:
* Cài đặt hệ tọa độ tầu đo: Hệ tọa độ của tầu đo qui định gốc 0 tại trọng tâm
của tầu, trục X dọc theo thân tầu và trục Y theo phương ngang.
Hình 3.34 - Hệ tọa độ của tầu đo
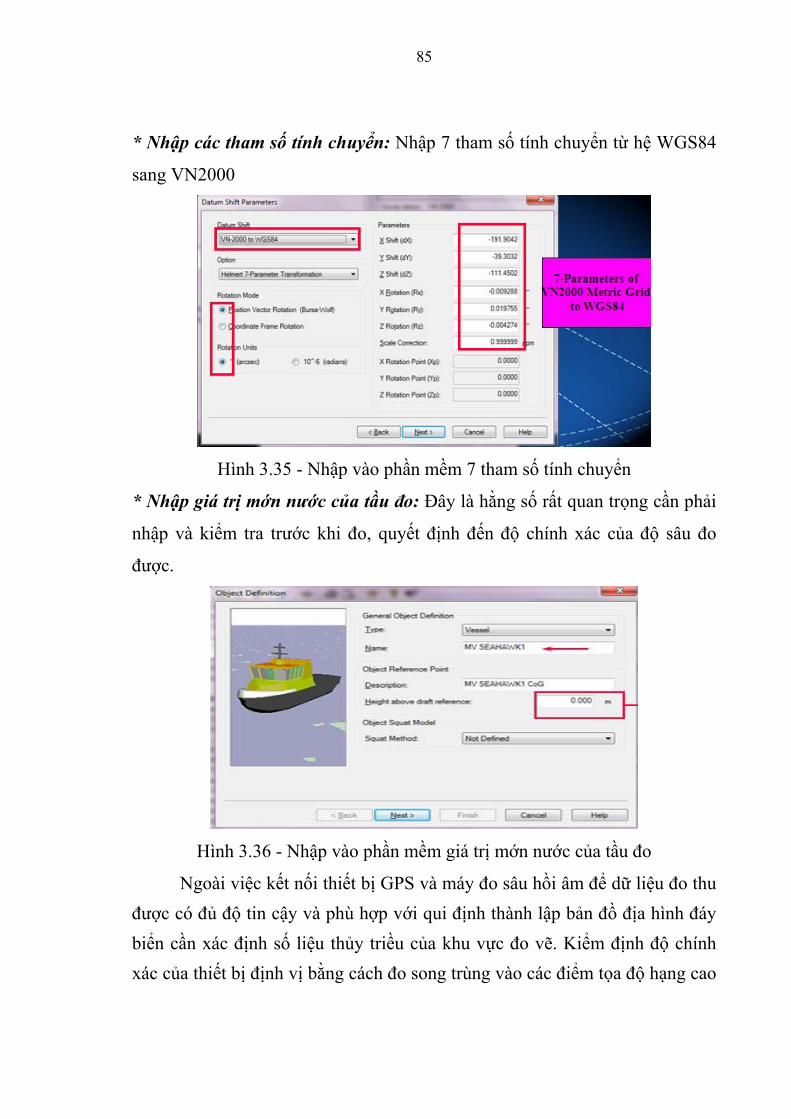
85
* Nhập các tham số tính chuyển: Nhập 7 tham số tính chuyển từ hệ WGS84
sang VN2000
Hình 3.35 - Nhập vào phần mềm 7 tham số tính chuyển
* Nhập giá trị mớn nước của tầu đo: Đây là hằng số rất quan trọng cần phải
nhập và kiểm tra trước khi đo, quyết định đến độ chính xác của độ sâu đo
được.
Hình 3.36 - Nhập vào phần mềm giá trị mớn nước của tầu đo
Ngoài việc kết nối thiết bị GPS và máy đo sâu hồi âm để dữ liệu đo thu được có đủ độ tin cậy và phù hợp với qui định thành lập bản đồ địa hình đáy biển cần xác định số liệu thủy triều của khu vực đo vẽ. Kiểm định độ chính xác của thiết bị định vị bằng cách đo song trùng vào các điểm tọa độ hạng cao
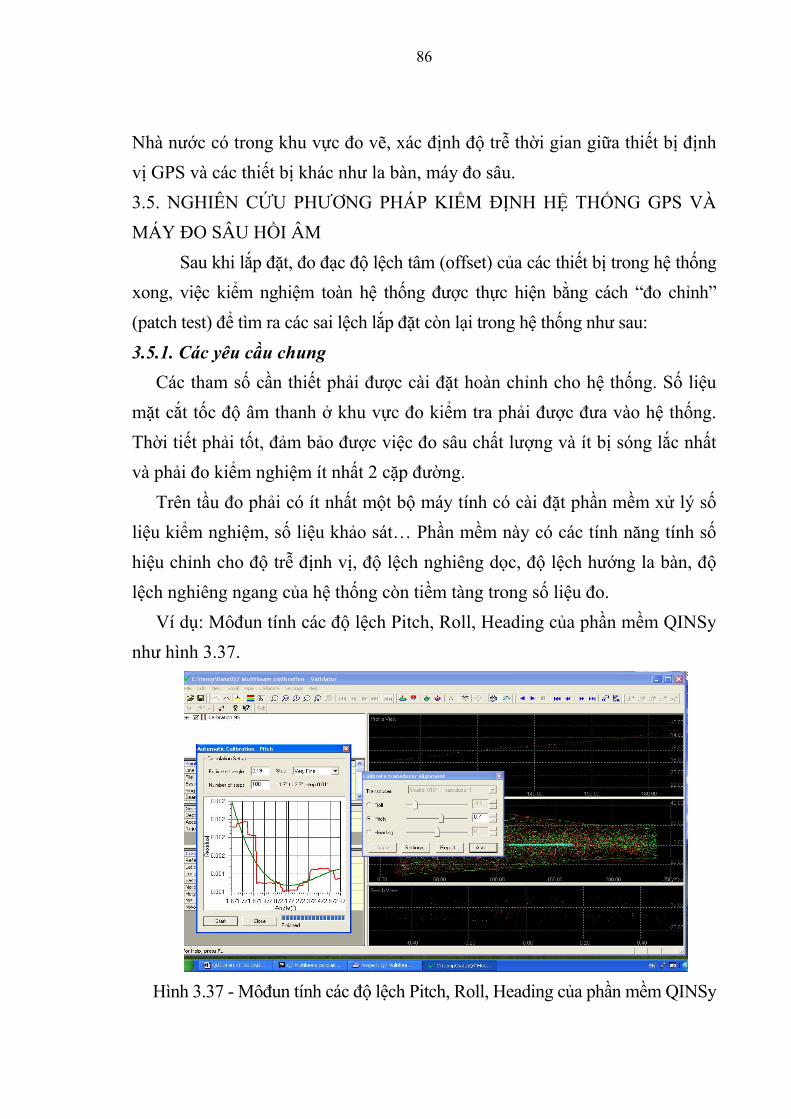
86
Nhà nước có trong khu vực đo vẽ, xác định độ trễ thời gian giữa thiết bị định vị GPS và các thiết bị khác như la bàn, máy đo sâu. 3.5. NGHIÊN CỨU PHƯƠNG PHÁP KIỂM ĐỊNH HỆ THỐNG GPS VÀ MÁY ĐO SÂU HỒI ÂM
Sau khi lắp đặt, đo đạc độ lệch tâm (offset) của các thiết bị trong hệ thống xong, việc kiểm nghiệm toàn hệ thống được thực hiện bằng cách “đo chỉnh” (patch test) để tìm ra các sai lệch lắp đặt còn lại trong hệ thống như sau: 3.5.1. Các yêu cầu chung
Các tham số cần thiết phải được cài đặt hoàn chỉnh cho hệ thống. Số liệu mặt cắt tốc độ âm thanh ở khu vực đo kiểm tra phải được đưa vào hệ thống. Thời tiết phải tốt, đảm bảo được việc đo sâu chất lượng và ít bị sóng lắc nhất và phải đo kiểm nghiệm ít nhất 2 cặp đường.
Trên tầu đo phải có ít nhất một bộ máy tính có cài đặt phần mềm xử lý số liệu kiểm nghiệm, số liệu khảo sát… Phần mềm này có các tính năng tính số hiệu chỉnh cho độ trễ định vị, độ lệch nghiêng dọc, độ lệch hướng la bàn, độ lệch nghiêng ngang của hệ thống còn tiềm tàng trong số liệu đo.
Ví dụ: Môđun tính các độ lệch Pitch, Roll, Heading của phần mềm QINSy như hình 3.37.
Hình 3.37 - Môđun tính các độ lệch Pitch, Roll, Heading của phần mềm QINSy
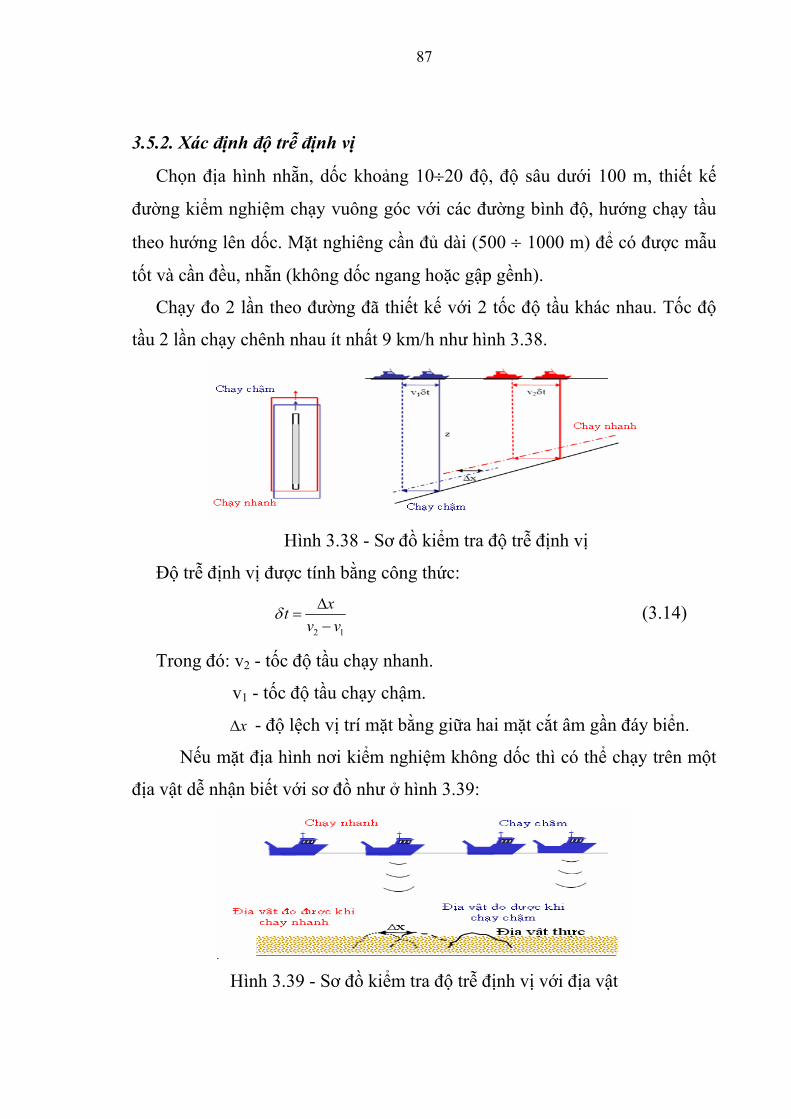
87
3.5.2. Xác định độ trễ định vị
Chọn địa hình nhẵn, dốc khoảng 10÷20 độ, độ sâu dưới 100 m, thiết kế
đường kiểm nghiệm chạy vuông góc với các đường bình độ, hướng chạy tầu
theo hướng lên dốc. Mặt nghiêng cần đủ dài (500 ÷ 1000 m) để có được mẫu
tốt và cần đều, nhẵn (không dốc ngang hoặc gập gềnh).
Chạy đo 2 lần theo đường đã thiết kế với 2 tốc độ tầu khác nhau. Tốc độ
tầu 2 lần chạy chênh nhau ít nhất 9 km/h như hình 3.38.
Hình 3.38 - Sơ đồ kiểm tra độ trễ định vị
Độ trễ định vị được tính bằng công thức:
2 1
xtv v
δ Δ=
− (3.14)
Trong đó: v2 - tốc độ tầu chạy nhanh.
v1 - tốc độ tầu chạy chậm.
xΔ - độ lệch vị trí mặt bằng giữa hai mặt cắt âm gần đáy biển.
Nếu mặt địa hình nơi kiểm nghiệm không dốc thì có thể chạy trên một
địa vật dễ nhận biết với sơ đồ như ở hình 3.39:
Hình 3.39 - Sơ đồ kiểm tra độ trễ định vị với địa vật
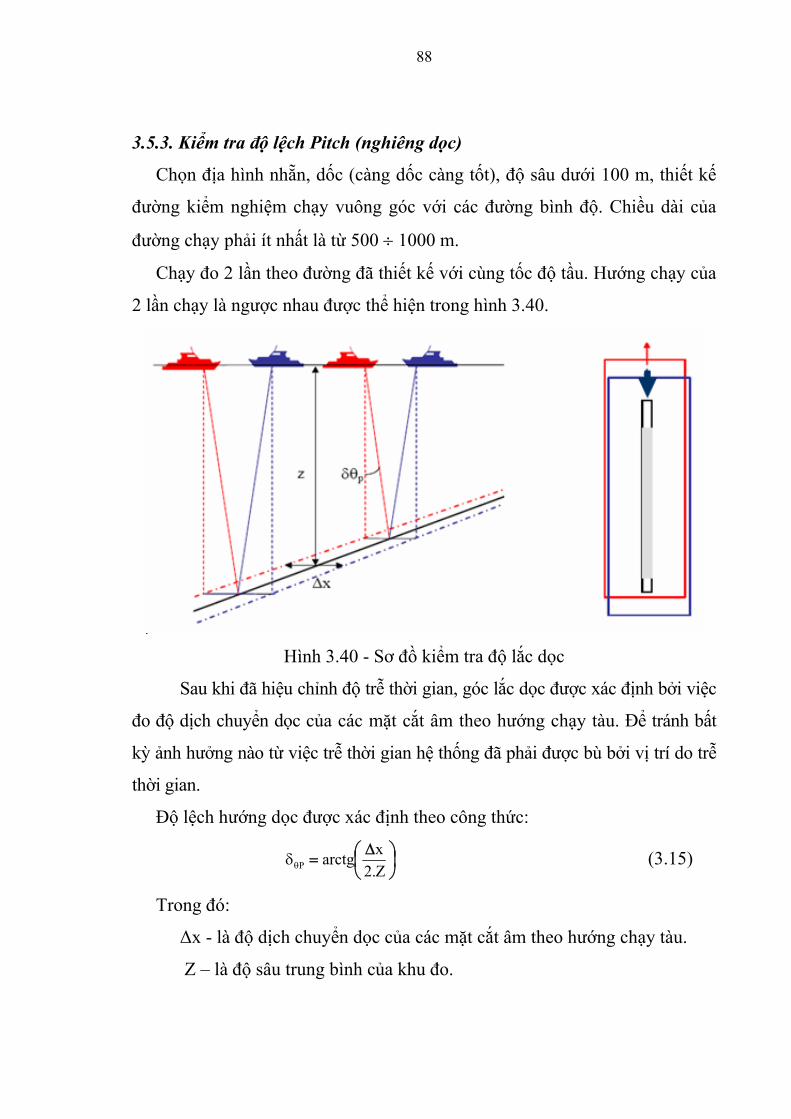
88
3.5.3. Kiểm tra độ lệch Pitch (nghiêng dọc)
Chọn địa hình nhẵn, dốc (càng dốc càng tốt), độ sâu dưới 100 m, thiết kế
đường kiểm nghiệm chạy vuông góc với các đường bình độ. Chiều dài của
đường chạy phải ít nhất là từ 500 ÷ 1000 m.
Chạy đo 2 lần theo đường đã thiết kế với cùng tốc độ tầu. Hướng chạy của
2 lần chạy là ngược nhau được thể hiện trong hình 3.40.
Hình 3.40 - Sơ đồ kiểm tra độ lắc dọc
Sau khi đã hiệu chỉnh độ trễ thời gian, góc lắc dọc được xác định bởi việc
đo độ dịch chuyển dọc của các mặt cắt âm theo hướng chạy tàu. Để tránh bất
kỳ ảnh hưởng nào từ việc trễ thời gian hệ thống đã phải được bù bởi vị trí do trễ
thời gian.
Độ lệch hướng dọc được xác định theo công thức:
⎟⎠⎞
⎜⎝⎛ Δ
=Z.2xarctgPθδ (3.15)
Trong đó:
Δx - là độ dịch chuyển dọc của các mặt cắt âm theo hướng chạy tàu.
Z – là độ sâu trung bình của khu đo.
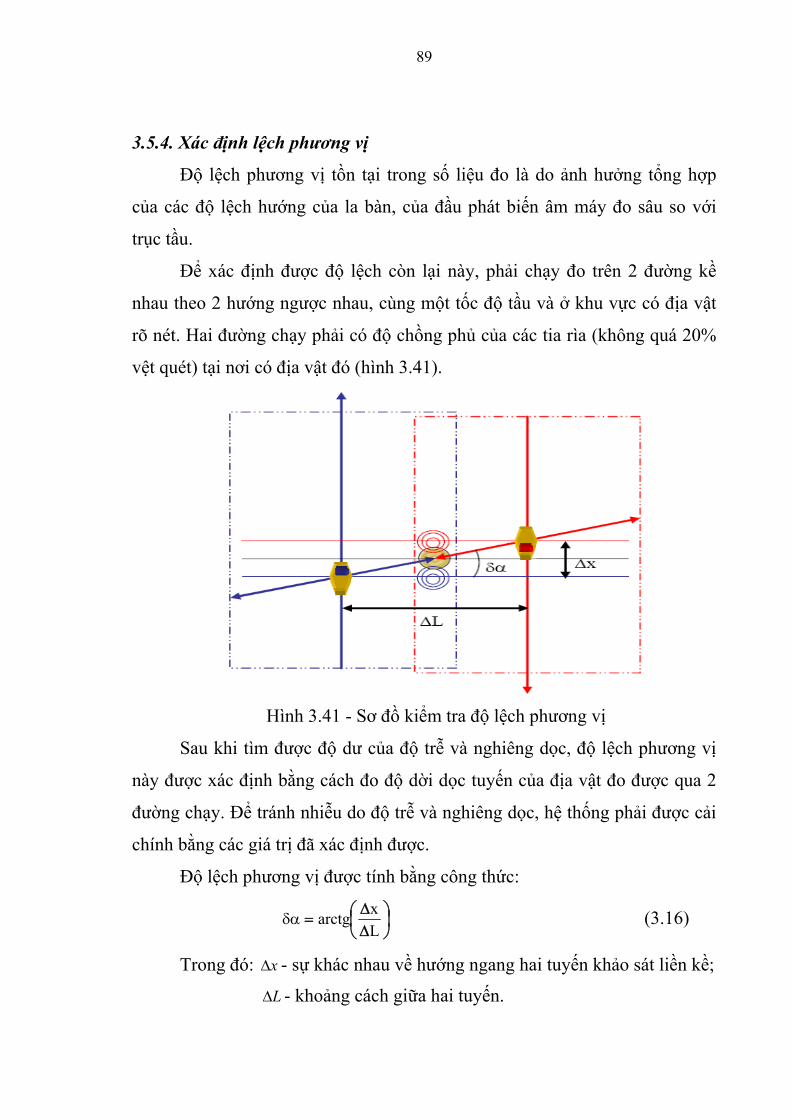
89
3.5.4. Xác định lệch phương vị
Độ lệch phương vị tồn tại trong số liệu đo là do ảnh hưởng tổng hợp
của các độ lệch hướng của la bàn, của đầu phát biến âm máy đo sâu so với
trục tầu.
Để xác định được độ lệch còn lại này, phải chạy đo trên 2 đường kề
nhau theo 2 hướng ngược nhau, cùng một tốc độ tầu và ở khu vực có địa vật
rõ nét. Hai đường chạy phải có độ chồng phủ của các tia rìa (không quá 20%
vệt quét) tại nơi có địa vật đó (hình 3.41).
Hình 3.41 - Sơ đồ kiểm tra độ lệch phương vị
Sau khi tìm được độ dư của độ trễ và nghiêng dọc, độ lệch phương vị
này được xác định bằng cách đo độ dời dọc tuyến của địa vật đo được qua 2
đường chạy. Để tránh nhiễu do độ trễ và nghiêng dọc, hệ thống phải được cải
chính bằng các giá trị đã xác định được.
Độ lệch phương vị được tính bằng công thức:
⎟⎠⎞
⎜⎝⎛
ΔΔ
=Lxarctgδα (3.16)
Trong đó: xΔ - sự khác nhau về hướng ngang hai tuyến khảo sát liền kề;
LΔ - khoảng cách giữa hai tuyến.
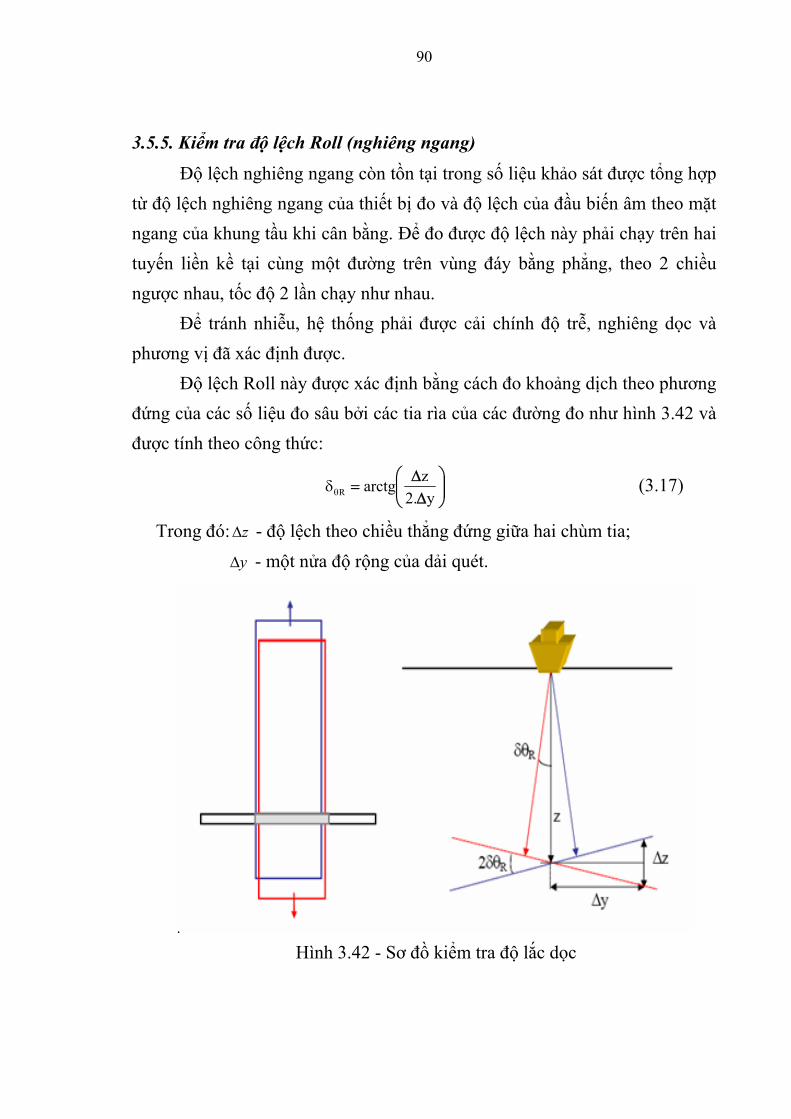
90
3.5.5. Kiểm tra độ lệch Roll (nghiêng ngang)
Độ lệch nghiêng ngang còn tồn tại trong số liệu khảo sát được tổng hợp từ độ lệch nghiêng ngang của thiết bị đo và độ lệch của đầu biến âm theo mặt ngang của khung tầu khi cân bằng. Để đo được độ lệch này phải chạy trên hai tuyến liền kề tại cùng một đường trên vùng đáy bằng phẳng, theo 2 chiều ngược nhau, tốc độ 2 lần chạy như nhau.
Để tránh nhiễu, hệ thống phải được cải chính độ trễ, nghiêng dọc và phương vị đã xác định được.
Độ lệch Roll này được xác định bằng cách đo khoảng dịch theo phương đứng của các số liệu đo sâu bởi các tia rìa của các đường đo như hình 3.42 và được tính theo công thức:
⎟⎟⎠
⎞⎜⎜⎝
⎛Δ
Δ=
y.2zarctgRθδ (3.17)
Trong đó: zΔ - độ lệch theo chiều thẳng đứng giữa hai chùm tia; yΔ - một nửa độ rộng của dải quét.
Hình 3.42 - Sơ đồ kiểm tra độ lắc dọc
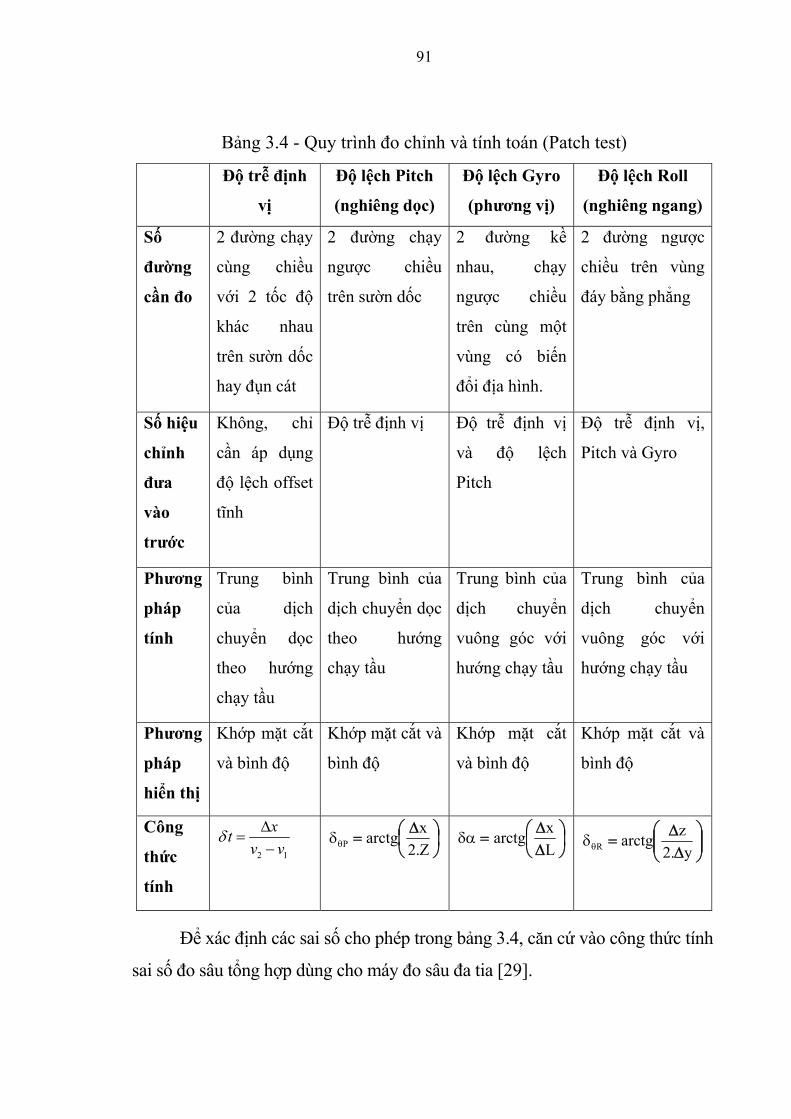
91
Bảng 3.4 - Quy trình đo chỉnh và tính toán (Patch test)
Độ trễ định
vị
Độ lệch Pitch
(nghiêng dọc)
Độ lệch Gyro
(phương vị)
Độ lệch Roll
(nghiêng ngang)
Số
đường
cần đo
2 đường chạy
cùng chiều
với 2 tốc độ
khác nhau
trên sườn dốc
hay đụn cát
2 đường chạy
ngược chiều
trên sườn dốc
2 đường kề
nhau, chạy
ngược chiều
trên cùng một
vùng có biến
đổi địa hình.
2 đường ngược
chiều trên vùng
đáy bằng phẳng
Số hiệu
chỉnh
đưa
vào
trước
Không, chỉ
cần áp dụng
độ lệch offset
tĩnh
Độ trễ định vị Độ trễ định vị
và độ lệch
Pitch
Độ trễ định vị,
Pitch và Gyro
Phương
pháp
tính
Trung bình
của dịch
chuyển dọc
theo hướng
chạy tầu
Trung bình của
dịch chuyển dọc
theo hướng
chạy tầu
Trung bình của
dịch chuyển
vuông góc với
hướng chạy tầu
Trung bình của
dịch chuyển
vuông góc với
hướng chạy tầu
Phương
pháp
hiển thị
Khớp mặt cắt
và bình độ
Khớp mặt cắt và
bình độ
Khớp mặt cắt
và bình độ
Khớp mặt cắt và
bình độ
Công
thức
tính
2 1
xtv v
δ Δ=
− ⎟
⎠⎞
⎜⎝⎛ Δ
=Z.2xarctgPθδ ⎟
⎠⎞
⎜⎝⎛
ΔΔ
=Lxarctgδα ⎟⎟
⎠
⎞⎜⎜⎝
⎛Δ
Δ=
y.2zarctgRθδ
Để xác định các sai số cho phép trong bảng 3.4, căn cứ vào công thức tính
sai số đo sâu tổng hợp dùng cho máy đo sâu đa tia [29].
92
222222XLTTLNCVz mmmmmm ++++= (3.18)
Trong đó:
- mZ: là sai số đo sâu tổng hợp;
- mV: là sai số xác định tốc độ truyền sóng âm trong nước;
- mNC: là sai số đo sâu tổng hợp do ảnh hưởng của các yếu tố ngoại
cảnh (sóng, gió …);
- mL: là sai số do độ dao động của đầu phát sóng âm;
- mTT: là sai số tính số hiệu chỉnh do thủy triều (tính theo công thức
2.17);
- mXL: là sai số đo sâu do thuật toán xử lý số liệu.
Trong [29] quy định sai số do thủy triều mTT không được vượt quá ½
sai số đo sâu tổng hợp mZ.
Biến đổi công thức (3.18) ta có:
222222XLLNCVTTz mmmmmm +++=− (3.19)
Nếu coi ảnh hưởng của các nguồn sai số trong vế phải công thức 3.19
là như nhau thì ảnh hưởng của mỗi nguồn sai số là:
4
22 mm TTZXLLNCV mmmm
−==== (3.20)
Nếu lấy mZ = 0,3 m thì ảnh hưởng của các nguồn sai số trong công thức
(3.20) là:
cmmmmm XLLNCV 13====
Sai số ảnh hưởng ngoại cảnh được tính theo công thức [29]:
222222
tHPRmmmmmmNC δθθθθ α
++++=
(3.21)
Coi ảnh hưởng của 5 nguồn sai số là như nhau ta tính được:
cmmmmmmtHPR
8,522222 ===== δθθθθ α
93
Với vận tốc chạy tầu 9 km/h; độ sâu Z = 50 m; góc mở chùm tia 130˚;
khoảng cách 2 tuyến chạy tầu S=100 m ta tính được các sai số cho phép trong
bảng 3.4: δt = 0,02 giây; δθP = 51”; δα = 1’43”; δθR = 1’36”.
Từ kết quả tính toán trên cho thấy khi kiểm định hệ thống GPS và máy
đo sâu hồi âm theo các tham số lắc dọc, lắc ngang, độ trễ định vị và độ lệch
phương vị theo quy trình kiểm định đã nêu trên thì độ lệch vị trí mặt bằng
giữa hai mặt cắt âm (trong đó mặt cắt âm là mặt cắt ngang của địa hình đáy
biển tương ứng với chùm quét của MBES vuông góc với hướng tầu chạy)
không được vượt quá đại lượng 5,8 cm.
Sau khi kiểm định tất cả các máy móc thiết bị, đưa tầu khảo sát đến
vùng đo tiến hành kiểm nghiệm kết quả đo sâu trước khi đo đạc ngoại nghiệp
bằng đĩa kiểm tra (barcheck). Thủ tục kiểm tra barcheck để khẳng định độ
chính xác của kết quả đo sâu trong ngày, phải được làm trước và sau khi kết
thúc mỗi ngày khảo sát.
Trên cơ sở phân tích lý thuyết, đo đạc và ghép nối thực nghiệm có thể
đưa ra một số nhận xét như sau:
Khi thành lập BĐĐHĐB để thu nhận dữ liệu địa hình trong cùng thời điểm phải kết nối hệ thống GPS và máy đo sâu hồi âm kèm theo một số thiết bị hiệu chỉnh, đo đạc khác.
Sau khi lắp đặt kết nối thiết bị cần tiến hành hiệu chỉnh các nguồn sai số ảnh hưởng đến kết quả đo, cài đặt các thông số khu đo như nhiệt độ, áp suất, độ mặn nước biển … kiểm định hệ thống và đo thử nghiệm trước khi đo chính.
Tùy theo diện tích khu vực đo vẽ, yêu cầu độ chính xác thành lập
BĐĐHĐB ven bờ tỷ lệ lớn, hình dạng khu đo mà xây dựng phương án kết
nối, chọn thiết bị đo phù hợp để nâng cao hiệu quả kinh tế.
94
Chương 4
NGHIÊN CỨU ỨNG DỤNG CÔNG NGHỆ ĐO CAO GPS TRONG
ĐO VẼ BẢN ĐỒ ĐỊA HÌNH ĐÁY BIỂN VEN BỜ TỶ LỆ LỚN
Trong công tác đo vẽ BĐĐHĐB ở nước ta hiện nay thường dùng máy
đo sâu hồi âm để xác định độ sâu từ mặt nước tức thời xuống đáy biển. Bên
cạnh đó cần phải tiến hành quan trắc thủy triều để hiệu chỉnh số liệu đo sâu về
mức “0” hải đồ nhằm đảm bảo tính an toàn cho các phương tiện vận tải ra vào
các công trình ven bờ. Như vậy tại khu vực đo vẽ BĐĐHĐB ven bờ cần phải
tiến hành quan trắc thủy triều để tính số hiệu chỉnh do thủy triều vào kết quả
đo sâu. Số liệu mức “0” hải đồ chỉ có thể xác định được tại các trạm quan trắc
triều cố định và phải tiến hành quan trắc trong thời gian dài (ít nhất 18 năm).
Nếu tại vùng bờ biển đo vẽ không có trạm quan trắc cố định thì phải tính toán
nội suy truyền độ cao hải đồ về để xác định số hiệu chỉnh đo sâu. Nội dung
này sẽ gây ra một nguồn sai số khá lớn trong kết quả đo sâu địa hình đáy biển
(trong thực tế sai số này có giá trị đến 20 cm như vùng biển Quảng Ngãi).
Địa hình đáy biển ven bờ ở nước ta rất phức tạp, biên độ thủy triều lớn,
chế độ thủy triều không đồng nhất nên việc đo đạc địa hình đáy biển ven bờ
thông qua số hiệu chỉnh độ sâu do thủy triều theo các phương pháp đo đạc
truyền thống sẽ gặp phải nhiều vấn đề tồn tại về tổ chức đo đạc, độ chính xác
đo vẽ địa hình đáy biển, tính hiệu quả của công tác đo sâu… Do đó cần phải
nghiên cứu phương pháp đo đạc, thiết bị và công nghệ tiên tiến nhằm nâng
cao hiệu quả thành lập BĐĐHĐB ven bờ tỷ lệ lớn ở Việt Nam.
4.1. KHÁI NIỆM VỀ THỦY TRIỀU VEN BỜ
4.1.1. Khái niệm chung về dao động của mực nước ven bờ
Dao động mực nước ven bờ được chia thành dao động chu kỳ, dao
động không chu kỳ và dao động hằng thế kỷ.
95
4.1.1.1. Dao động chu kỳ
Dao động chu kỳ bao gồm triều lên, triều xuống, biến đổi khí tượng do
tiến trình mưa hàng năm gây ra. Sự dao động gắn liền với sự thay đổi chu kỳ
của hướng gió, như gió mùa. Sự dao động chu kỳ của mặt nước do lực tạo
thành triều bởi sự tác động tương hỗ giữa khối lượng trái đất, mặt trăng và mặt
trời. Đó là những chuyển động biểu thị sự thay đổi định kỳ của mực nước và
dòng chảy. Mực nước cao nhất trong lúc triều lên gọi là mực nước đầy. Mực
nước thấp nhất trong nước triều xuống gọi là nước kém (ròng). Hiệu hai mực
nước kề nhau (đây - kém) gọi là độ lớn thủy triều. Việc quan sát thủy văn hàng
năm cho phép xác định sự chênh lệch về thời gian hình thành nước đầy và kém
so với mực nước trung bình của thủy triều. Do sự thay đổi tương quan vị trí trái
đất, mặt trăng, mặt trời mà độ lớn thuỷ triều thay đổi theo ngày, tháng hoặc
năm (hay dài hơn).
Ngoài khơi, độ lớn thủy triều đạt từ 0.8 – 1.0 m, gần lục địa do sự chia
cắt của đường bờ làm sẽ tác động đến độ lớn thủy triều [23].
4.1.1.2. Dao động không chu kì
Dao động không chu kỳ là do sự thay đổi ngẫu nhiên của lượng mưa,
sự bốc hơi do tác động của gió không theo chu kỳ cố định, động đất ngầm và
phát xuất của núi lửa gây ra sóng thần, các dòng chảy tạm thời, sự thay đổi áp
suất không khí, sự thay đổi mật độ của các đại dương. Mực nước đại dương
phụ thuộc lượng mưa và dòng chảy, sự thay đổi của nó theo thời gian phụ
thuộc vào những yếu tố đó tác động đến những đặc điểm khí hậu của từng
vùng. Trong các đại dương, dao động không chu kỳ do các nguyên nhân này
không vượt quá 20 cm; tại các biển ngăn cách với các đại dương thì độ chênh
này lớn hơn 50 cm. Trong trường hợp sự biến đổi nước biển dưới tác động
của gió gắn liền với hiện tượng dồn đuổi trong phạm vi gần bờ thì độ lớn dao
động này phụ thuộc điều kiện khu vực độ sâu, địa hình đáy biển. Dao động
96
này lớn nhất ở vùng gần bờ cạn, vịnh hẹp dài, eo hẹp, các cửa sông và đạt đến
vài canh, hiện tượng dao động này kéo dài đến 2 - 3 ngày đêm. Những biến
động không chu kỳ do mặt trời gây nên sẽ làm thay đổi nhiệt độ và mật độ
của nước biển. Trong vùng có mật độ cao, mực nước hạ và ngược lại. Trong
một vài trường hợp do sự thay đổi mật độ giữa các vùng nước sẽ tạo thành bờ
cháy. Mặt khác, sự thay đổi không chu kỳ của áp suất khí quyển cũng gây ra
dao động mực nước, biểu hiện trong việc hình thành các sóng thần. Với sự
thay đổi áp suất khí quyển 1 mbar, mực nước biển thay đổi 10 mm.
4.1.2. Mực nước biển trung bình
Là giá trị trung bình của mực nước biển được quan sát trong một
khoảng thời gian nhất định, được chia thành mực nước biển trung bình ngày
đêm, tháng năm, nhiều năm. Đối với công tác trắc địa, mực nước biển trung
bình nhiều năm được sử dụng để tính độ sâu và độ cao (thường được gọi là
mức “0” hải đồ). Đây cũng là giá trị trung bình số học của những giá trị trung
bình nhiều năm (theo quy định là 18,67 năm). Khi tính mực nước biển trung
bình cần phải loại trừ dao động thủy triều có chu kỳ, vì vậy thời gian cần thiết
để quan sát theo độ chính xác cho trước được xác định bởi độ lớn dao động có
chu kỳ. Mực nước biển trung bình thay đổi từ điểm này qua điểm khác, chủ
yếu phụ thuộc chế độ thủy văn từng vùng [23].
4.1.3. Những nguyên nhân chính gây ra sự biến động mực nước biển ven bờ Có nhiều nguyên nhân gây ra sự biến động mực nước ven biển:
- Tác động của những lực do những yếu tố khí tượng thủy văn gây ra.
- Tác động của những lực thiên văn, là những lực tạo thành thủy triều
của mặt trăng và mặt trời.
- Tác động của những lực địa động, biểu hiện trong quá trình kiến tạo
vỏ trái đất có diễn biến hàng thế kỷ, động đất ngầm dưới nước, các nứt rạn và
di động của vỏ trái đất.
97
4.1.3.1. Biến động mực nước ven biển do tác động của những lực từ những
yếu tố khí tượng thủy văn gây ra
Tác động của những lực do những yếu tố khí tượng thủy văn (gọi tắt là
những lực khí tượng thủy văn) gây ra biến động mực nước biển bao gồm: tác
động do biến đổi khí áp, tác động do gió, tác động do chênh lệch giữa lượng
nước chảy đến và lượng nước chảy đi, tác động do biến đổi tỷ trọng nước biển.
4.1.3.2. Biến động mực nước ven biển do tác động của biến đổi khí áp
Sự thay đồi nhiệt độ trong không khí làm thay đổi áp suất khí quyển, từ
đó tác động đến sự thay đổi mực nước ven biển. Người ta đã chứng minh
được là ở vùng biển thoáng, khí áp biến đổi 1 mbar làm cho mực nước biển ở
đấy biển đổi 1 cm. Trong điều kiện thời tiết bình thường, không có mưa to,
gió lớn, khí áp ít khi biến đổi so với trị số khí áp chuẩn là 1013 mbar. Khi có
mưa to, gió lớn khí áp biến đổi nhiều hơn.
4.2. CÔNG TÁC QUAN TRẮC THỦY TRIỀU PHỤC VỤ THÀNH LẬP
BĐĐHĐB VEN BỜ
4.2.1. Thiết bị quan trắc mực nước biển
Việc quan trắc sự thay đổi của mặt nước biển trong quá trình đo vẽ bản
đồ địa hình đáy biển được tiến hành trên các trạm quan trắc mực nước bằng
các thiết bị tự ghi hoặc thước đo nước.
Các trạm quan trắc mực nước cần phải có: Thiết bị đo mực nước biển
và cơ sở độ cao. Cơ sở độ cao thông thường gồm hai mốc. Mốc độ cao chính
và mốc độ cao phụ. Mốc chính dùng để kiểm tra độ cao mốc phụ, còn mốc
phụ dùng để xác định số “0” của thước đo mực nước tại trạm quan trắc.
Các trạm quan trắc mực nước biển theo mục đích sử dụng, độ dài thời
gian quan trắc được chia làm ba loại: Trạm cố định, trạm phụ và trạm tạm thời.
Các trạm cố định là trạm trong hệ thống trạm nghiệm triều nhà nước,
dùng để tính toán, xác định mực nước biển trung bình, mực nước biển lý
98
thuyết thấp nhất theo các quan trắc trực tiếp cũng như dùng để xác định mực
nước biển tức thời. Các trạm phụ là các trạm có thời gian quan trắc trong
khoảng 3 ÷ 6 tháng. Những trạm này được đặt ở những vùng mà mật độ các
trạm quá thưa, cũng như dùng để xác định mực nước biển trung bình và tính
toán mực nước biển thấp nhất theo lý thuyết. Các trạm tạm thời là các trạm
quan trắc chỉ dùng trong đo vẽ bản đồ, khi mà mật độ trạm cố định và trạm
phụ chưa đủ để xác định sự thay đổi mực nước ở vùng đo vẽ. Các trạm tạm
thời dùng để xác định độ sâu tức thời của quá trình đo vẽ trên biển.
Các trạm quan trắc mực nước biển theo cấu tạo lại chia ra làm các loại:
thước đo, cọc đo, loại kết hợp thước và cọc đo, trạm với thiết bị tự ghi mực
nước. Trạm quan trắc mực nước dạng thước đo có cấu tạo đơn giản. Bao gồm
một thước đo gắn chặt, cố định theo phương thẳng đứng. Trạm quan trắc dạng
cọc đo bao gồm một dãy cọc được đóng xuống nền đáy biển theo đường thẳng
có hướng vuông góc với đường bờ, làm sao cho chênh cao giữa các cọc cạnh
nhau khoảng 0,5 m. Để đạt được điều này cần phải tiến hành đo thủy chuẩn
để lập mặt cắt. Cọc thường có đường kính 15 ÷ 20 cm và dài 1 ÷ 4 m (phụ
thuộc vào tính chất của nền đáy). Mặt cắt trên của cọc không được cao quá
0,2 m so với mặt nền đáy. Việc quan trắc trên cọc nước được tiến hành bằng
các mia đo nước di động.
Trạm quan trắc có thiết bị tự ghi là trạm nghiệm triều có cấu tạo phức
tạp và bao gồm bộ tự ghi và thước đo mực nước. Thước đo mực nước đặt ở
gần bộ tự ghi và ở ngoài giếng. Theo thước đo tiến hành đọc số liệu để kiểm
tra số liệu của bộ tự ghi theo thời gian.
4.2.2. Chọn vị trí đặt trạm quan trắc mực nước
Vị trí đặt trạm quan trắc mực nước biển phải được chọn sao cho thỏa
mãn các yêu cầu sau:
- Ít bị ảnh hưởng do sóng.
99
- Ít bị tác động do hoạt động của con người.
- Có thể dễ dàng, thuận lợi tiến hành công việc đo ngắm quan trắc.
- Từ trên bờ có thể đọc trực tiếp vị trí mực nước biển theo thước đo của trạm.
- Ở gần trạm cần có mốc độ cao được đo nối với điểm độ cao nhà nước.
Việc chọn loại nghiệm triều ven bờ phụ thuộc vào đặc trưng bờ biển, địa
hình đáy biển và đại lượng dao động của mực nước biển. Trạm nghiệm triều
ngoài khơi được dùng để xác định những đặc điểm của sự dao động mực nước
biển ở vùng đo vẽ xa bờ và dùng để đưa độ sâu về mặt chuẩn mà không cần nội
suy theo vùng.
4.2.3. Quan trắc mực nước
Quan trắc tại trạm nghiệm triều được tiến hành theo mặt giả định
không thay đổi trong suốt thời gian đo vẽ được gọi là “0” trạm thường lấy
dưới mực nước ròng thấp nhất. Trong trường hợp cá biệt có thể trùng với
số 0 của thước đo.
Ở vùng biển mà ảnh hưởng của thủy triều không lớn tất cả các trạm
không có thiết bị tự ghi thì được quan trắc lúc 0, 6, 12, 18 tính theo giờ
Greenwich [24]. Trong thời gian có hiện tượng nước dâng hoặc hạ theo gió,
nếu mực nước thay đổi trong một giờ vượt quá 0,1 m thì cần tiến hành quan
trắc theo từng giờ.
Ở vùng biển có thủy triều kể cả giá trị trung bình < 0,5 m thì trên tất cả
các trạm không có thiết bị tự ghi phải tiến hành quan trắc theo từng giờ. Nếu
độ lớn của thủy triều bằng hoặc vượt quá 1 m thì trong khoảng nửa giờ trước
và sau thời điểm nước cường và nước dòng, thì cứ 10 phút tiến hành đọc số
một lần. Số đọc trên thước đo mực nước với độ chính xác tới 1 cm và thời
gian xác định với độ chính xác 1-2 phút. Việc quan trắc được tiến hành trong
suốt thời gian đo vẽ hoặc trong suốt cả một giai đoạn.
Số liệu quan trắc được sử dụng vào mục đích:
100
- Xác định số “0” độ sâu của trạm.
- Truyền số “0” độ sâu của trạm đến các trạm khác bằng phương pháp
thủy chuẩn.
4.2.4. Xử lý kết quả quan trắc mực nước
Việc xử lý kết quả quan trắc mực nước biển bắt đầu từ việc đánh giá
chất lượng đo đạc của những số liệu chung nhất như: Thời gian quan trắc, độ
dài thời gian liên tục quan trắc, ngày đo nối thủy chuẩn.
Hình 4.1 - Đồ thị biểu diễn số liệu quan trắc triều
Đầu tiên cần phải hiệu chỉnh thời điểm đọc số theo số hiệu chỉnh đồng
hồ, sau đó đưa tất cả các số đọc độ cao mực nước về “0” trạm. Dựa vào độ
cao nhận được dựng đồ thị thay đổi mực nước. Số hiệu chỉnh đồng hồ được
xác định bằng cách so đồng hồ với tín hiệu đài phát thanh rồi phân bổ tỷ lệ
thuận theo khoảng thời gian giữa hai lần với nhau và số hiệu chỉnh được
chỉnh ngay trên sổ đo ngắm dựa trên số liệu đo thủy chuẩn.
101
Vẽ đồ thị thay đổi mực nước như hình 4.1 trong đó trục X là trục thời
gian (theo tỷ lệ 2 cm ứng với một giờ), trục Y là trục cao mực nước (theo tỷ lệ
1 mm tương ứng với 5 cm). Theo các số liệu các điểm quan trắc dựng đường
cong trơn bằng thước cong.
Theo đồ thị nhận được thấy chỗ nào có số đọc sai lầm thì loại bỏ. Trên
đồ thị ghi tên trạm, đơn vị đo, thời điểm bắt đầu và kết thúc quan trắc, khoảng
đo ngắm có chú giải thời gian quan trắc.
4.2.5. Đo nối độ cao tới các trạm quan trắc mực nước
Các trạm quan trắc mực nước cần được đo nối độ cao đến lưới độ cao
nhà nước.
- Mốc độ cao chính của trạm đo nối tới lưới độ cao nhà nước bằng thủy
chuẩn hạng IV nếu khoảng cách từ trạm tới mốc thủy chuẩn nhà nước không
lớn hơn 10 km, trường hợp ngược lại cần đo nối thủy chuẩn hạng III.
- Đo nối độ cao giữa mốc độ cao chính của trạm tới các mốc phụ hoặc
thước đo nước của trạm thủy chuẩn hạng IV.
4.3. CÔNG TÁC THÀNH LẬP BĐĐHĐB VEN BỜ KHI SỬ DỤNG KẾT
QUẢ ĐO THỦY TRIỀU
Để đo vẽ thành lập bản đồ địa hình đáy biển ven bờ, người ta thường sử
dụng công nghệ GPS (Gc-GPS hoặc DGPS) để xác định tọa độ các điểm đo sâu
(Xi,Yi) trên mặt biển và sử dụng máy đo sâu hồi âm để xác định độ sâu của đáy
biển ( iđoZ ) so với mặt nước tức thời tại thời điểm đo (hình 4.2). Như vậy tại mỗi
điểm đo sâu chúng ta có một giá trị )Z,Y,X( iđoii . Mặt khác tại khu vực đo vẽ, cần
phải thành lập các trạm nghiệm triều để quan trắc thuỷ triều trong khoảng thời
gian đo địa hình đáy biển.
Tuỳ thuộc vào vị trí của khu vực đo vẽ và thiết bị quan trắc thuỷ
triều được trang bị có thể sử dụng một trong các phương pháp quan trắc
thủy triều sau
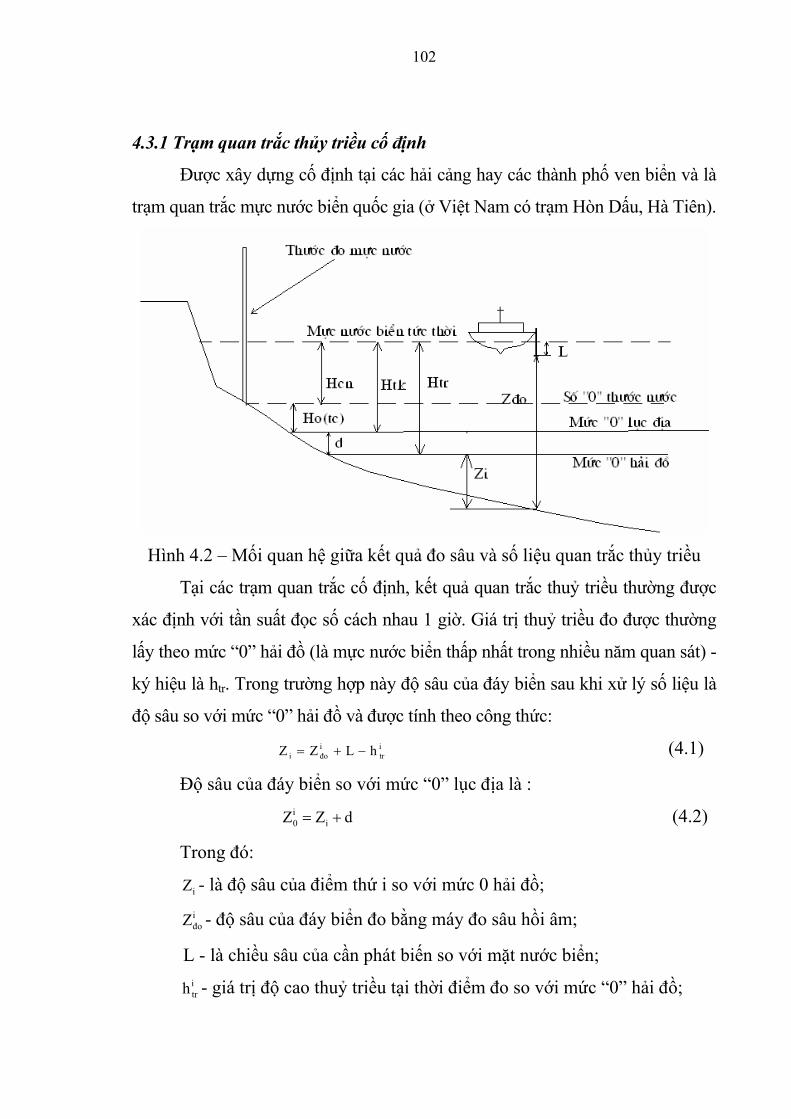
102
4.3.1 Trạm quan trắc thủy triều cố định
Được xây dựng cố định tại các hải cảng hay các thành phố ven biển và là
trạm quan trắc mực nước biển quốc gia (ở Việt Nam có trạm Hòn Dấu, Hà Tiên).
Hình 4.2 – Mối quan hệ giữa kết quả đo sâu và số liệu quan trắc thủy triều
Tại các trạm quan trắc cố định, kết quả quan trắc thuỷ triều thường được
xác định với tần suất đọc số cách nhau 1 giờ. Giá trị thuỷ triều đo được thường
lấy theo mức “0” hải đồ (là mực nước biển thấp nhất trong nhiều năm quan sát) -
ký hiệu là htr. Trong trường hợp này độ sâu của đáy biển sau khi xử lý số liệu là
độ sâu so với mức “0” hải đồ và được tính theo công thức:
itr
iđoi hLZZ −+= (4.1)
Độ sâu của đáy biển so với mức “0” lục địa là :
dZZ ii0 += (4.2)
Trong đó:
iZ - là độ sâu của điểm thứ i so với mức 0 hải đồ; iđoZ - độ sâu của đáy biển đo bằng máy đo sâu hồi âm;
L - là chiều sâu của cần phát biến so với mặt nước biển; itrh - giá trị độ cao thuỷ triều tại thời điểm đo so với mức “0” hải đồ;
103
d - độ chênh giữa “0” lục địa và mức “0” hải đồ.
4.3.2. Quan trắc thủy triều bằng thước đo mực nước
Trong trường hợp này (hình 4.3) sẽ đọc được độ cao mặt nước biển tức
thời trên thước đo mực nước (cây thủy chí) là hcn.
Hình 4.3 – Quan trắc thủy triều bằng thước đo mực nước biển
Khi đó độ sâu của địa hình đáy biển so với mức “0” hải đồ và được tính
theo công thức:
dhhLZZ )tc(0icn
iđoi −−−+= (4.3)
Trong đó: )tc(0h - là độ cao điểm “0” của thước đo mực nước tính theo
hệ độ cao lục địa.
4.3.3. Quan trắc thủy triều bằng máy đo triều ký tự động
Hiện nay có rất nhiều đơn vị sản xuất quan trắc thủy triều bằng thiết bị
đo triều ký tự động (hình 4.4).
Hình 4.4 - Quan trắc thủy triều bằng thiết bị đo triều kí

104
Khi đó độ sâu của địa hình đáy biển so với mức “0” hải đồ và được tính
theo công thức:
dhLZZ itk
iđoi −−+= (4.4)
Trong đó: itrh - là độ cao của mặt nước biển tức thời so với mức “0” lục địa.
Như vậy nếu xác định độ sâu của địa hình đáy biển theo phương pháp
truyền thống sẽ gặp phải một số vấn đề sau:
- Cần phải thành lập một số trạm nghiệm triều và tổ chức quan sát thủy
triều. Công việc này sẽ đòi hỏi chi phí về nhân lực và thiết bị đo.
- Thuỷ triều ven bờ ở nước ta có biên độ rất lớn 3 ÷ 5 m, chế độ thuỷ
triều phức tạp phụ thuộc vào từng khu vực. Thời gian quan trắc triều thường
tiến hành 1 lần đọc số/giờ, do đó độ cao của thuỷ triều tại thời điểm đo sâu ti
sẽ được xác định theo nguyên tắc nội suy. Đây chính là một trong những
nguyên nhân gây ra sai số đo sâu khi khảo sát thành lập bản đồ địa hình đáy
biển ven bờ.
- Bản đồ địa hình đáy biển ven bờ tỷ lệ lớn dùng trong khảo sát thiết kế
và thi công các công trình ven biển thường được coi là phần địa hình của lục
địa kéo dài và lấy theo hệ tọa độ và độ cao lục địa (ở nước ta sử dụng hệ độ
cao thường). Mặt gốc độ cao khác với mức “0” hải đồ một khoảng cách d
(hình 4.2), giá trị d chỉ có thể xác định được tại các trạm quan trắc mực nước
có thời gian quan trắc liên tục kéo dài trong vòng 18 ÷ 61 năm. Các trạm quan
trắc mực nước cố định đặt tại một số vị trí, hải cảng cố định (ở Việt nam là
các trạm hòn Dấu, Hà Tiên...). Vì vậy để có được số chênh giữa mặt thuỷ
chuẩn gốc và mức “0” hải đồ tại vùng đặt trạm quan trắc mực nước trên từng
khu vực cần phải sử dụng một số phương pháp tính toán nội suy [13]. Điều
này cũng làm ảnh hưởng đến độ chính xác của bản đồ địa hình đáy biển tỷ lệ
lớn cần thành lập. Do đó vấn đề nghiên cứu phương pháp và thiết bị đo đạc
trên biển để xác định trực tiếp độ cao của địa hình đáy biển ven bờ mà không
105
phải tính qua các yếu tố thuỷ triều nhằm nâng cao hiệu quả của công tác đo vẽ
thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn là rất cần thiết.
4.4. ỨNG DỤNG CÔNG NGHỆ ĐO CAO GPS - RTK TRONG ĐO SÂU
ĐỂ THAY THẾ SỐ HIỆU CHỈNH THỦY TRIỀU
Khi sử dụng công nghệ GPS - RTK kết hợp với máy đo sâu hồi âm để đo
vẽ bản đồ địa đáy biển ven bờ, trạm base của máy thu GPS được đặt tại điểm
khống chế nhà nước (điểm M - hình 4.5).
Hình 4.5 – Đo vẽ BĐ ĐHĐB ven bờ bằng công nghệ GPS-RTK và máy đo
sâu hồi âm
Tại M đã biết tọa độ và độ cao trắc địa HM, độ cao thuỷ chuẩn hM, khi
đó tính được dị thường độ cao tại điểm M theo công thức:
NM = HM - hM (4.5)
Ăng ten của trạm rover được cài đặt trên tầu đo sâu và ghép nối với
máy đo sâu hồi âm, khi đó cần phải xác định độ cao của ăng ten đến mặt nước
biển (LA) và độ sâu của cần phát biến so với mặt nước biển L (hình 4.5). Sau
khi quy chuẩn điểm trên bờ về hệ tọa độ và độ cao đang sử dụng trên bờ, tiến
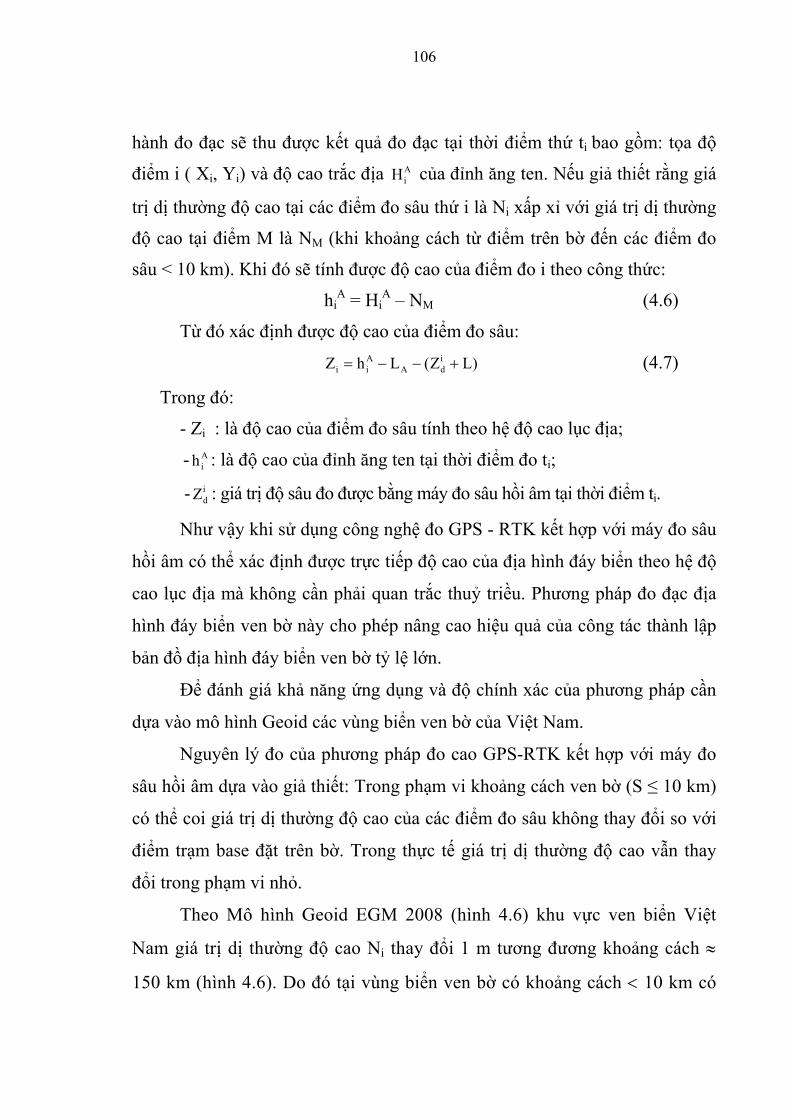
106
hành đo đạc sẽ thu được kết quả đo đạc tại thời điểm thứ ti bao gồm: tọa độ
điểm i ( Xi, Yi) và độ cao trắc địa AiH của đỉnh ăng ten. Nếu giả thiết rằng giá
trị dị thường độ cao tại các điểm đo sâu thứ i là Ni xấp xỉ với giá trị dị thường
độ cao tại điểm M là NM (khi khoảng cách từ điểm trên bờ đến các điểm đo
sâu < 10 km). Khi đó sẽ tính được độ cao của điểm đo i theo công thức:
hiA = Hi
A – NM (4.6)
Từ đó xác định được độ cao của điểm đo sâu:
)LZ(LhZ idA
Aii +−−= (4.7)
Trong đó:
- Zi : là độ cao của điểm đo sâu tính theo hệ độ cao lục địa;
- Aih : là độ cao của đỉnh ăng ten tại thời điểm đo ti;
- idZ : giá trị độ sâu đo được bằng máy đo sâu hồi âm tại thời điểm ti.
Như vậy khi sử dụng công nghệ đo GPS - RTK kết hợp với máy đo sâu
hồi âm có thể xác định được trực tiếp độ cao của địa hình đáy biển theo hệ độ
cao lục địa mà không cần phải quan trắc thuỷ triều. Phương pháp đo đạc địa
hình đáy biển ven bờ này cho phép nâng cao hiệu quả của công tác thành lập
bản đồ địa hình đáy biển ven bờ tỷ lệ lớn.
Để đánh giá khả năng ứng dụng và độ chính xác của phương pháp cần
dựa vào mô hình Geoid các vùng biển ven bờ của Việt Nam.
Nguyên lý đo của phương pháp đo cao GPS-RTK kết hợp với máy đo
sâu hồi âm dựa vào giả thiết: Trong phạm vi khoảng cách ven bờ (S ≤ 10 km)
có thể coi giá trị dị thường độ cao của các điểm đo sâu không thay đổi so với
điểm trạm base đặt trên bờ. Trong thực tế giá trị dị thường độ cao vẫn thay
đổi trong phạm vi nhỏ.
Theo Mô hình Geoid EGM 2008 (hình 4.6) khu vực ven biển Việt
Nam giá trị dị thường độ cao Ni thay đổi 1 m tương đương khoảng cách ≈
150 km (hình 4.6). Do đó tại vùng biển ven bờ có khoảng cách < 10 km có
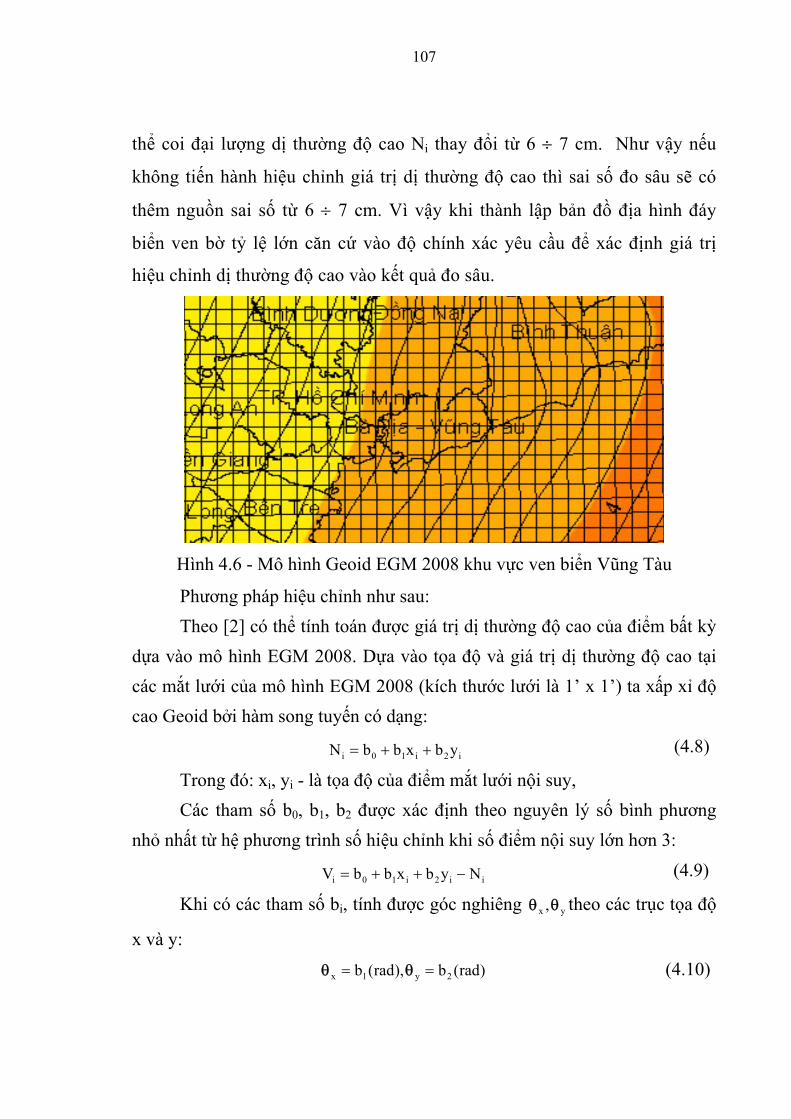
107
thể coi đại lượng dị thường độ cao Ni thay đổi từ 6 ÷ 7 cm. Như vậy nếu
không tiến hành hiệu chỉnh giá trị dị thường độ cao thì sai số đo sâu sẽ có
thêm nguồn sai số từ 6 ÷ 7 cm. Vì vậy khi thành lập bản đồ địa hình đáy
biển ven bờ tỷ lệ lớn căn cứ vào độ chính xác yêu cầu để xác định giá trị
hiệu chỉnh dị thường độ cao vào kết quả đo sâu.
Hình 4.6 - Mô hình Geoid EGM 2008 khu vực ven biển Vũng Tàu
Phương pháp hiệu chỉnh như sau: Theo [2] có thể tính toán được giá trị dị thường độ cao của điểm bất kỳ
dựa vào mô hình EGM 2008. Dựa vào tọa độ và giá trị dị thường độ cao tại các mắt lưới của mô hình EGM 2008 (kích thước lưới là 1’ x 1’) ta xấp xỉ độ cao Geoid bởi hàm song tuyến có dạng:
i2i10i ybxbbN ++= (4.8)
Trong đó: xi, yi - là tọa độ của điểm mắt lưới nội suy, Các tham số b0, b1, b2 được xác định theo nguyên lý số bình phương
nhỏ nhất từ hệ phương trình số hiệu chỉnh khi số điểm nội suy lớn hơn 3:
ii2i10i NybxbbV −++= (4.9)
Khi có các tham số bi, tính được góc nghiêng yx ,θθ theo các trục tọa độ
x và y: )rad(b),rad(b 2y1x == θθ (4.10)

108
Tính góc nghiêng toàn phần:
2y
2xmax θθθ += (4.11)
Tính góc phương vị của hướng dốc nhất theo công thức:
obbanctg 180)/( 120 −=α (4.12)
Tính số hiệu chỉnh vào độ cao của điểm đo sâu: )cos(DN 0iMiMmaxiM ααθ −=Δ −−− (4.13)
Tính chênh cao giữa điểm trạm Base M và điểm đo sâu thứ i: iMiMiM NHh −−− Δ−Δ=Δ (4.14)
Trong đó: iMH −Δ - là chênh cao trắc địa giữa điểm đo sâu thứ i so với
trạm base M. 4.5. GIẢI PHÁP THU TÍN HIỆU GPS - RTK TRÊN TẦU ĐO
Để thu được tín hiệu GPS - RTK trên tầu đo, phải sử dụng phần mềm chuyên dụng cài đặt dữ liệu đầu ra của trạm rover với định dạng NMEA. Với định dạng dữ liệu này cho phép ghép nối dữ liệu GPS - RTK với dữ liệu đo sâu theo nguyên tắc đồng bộ thời gian. Các bước được thực hiện như sau: Bước 1: Cài đặt trạm base
- Cân máy → bật máy thu GPS. - Cắm Falm điều khiển vào máy thu GPS.
- Trên màn hình Falm điều khiển: Start → Hcgpsset → Open port →
Work mode → Autobase → Apply → Ok.
- Start → Landstart → Survey → Star base receive → Here → Nhập các thông số như: Tên điểm (point name); Cao ăng ten (Angten
heigh); Tọa độ, cao độ X, Y, H → Ok → Cắm ac qui → Rút Falm
→ Ok → Cắm Radio link → Ok. Bước 2 : Cài đặt trạm rover
- Start → Hcgpsset → Work mode → Auto rover → Apply → Ok.
- Start → Survey → Measurpoint → Rút Falm → Kết nối Rover với
máy tính qua cổng Com 1.
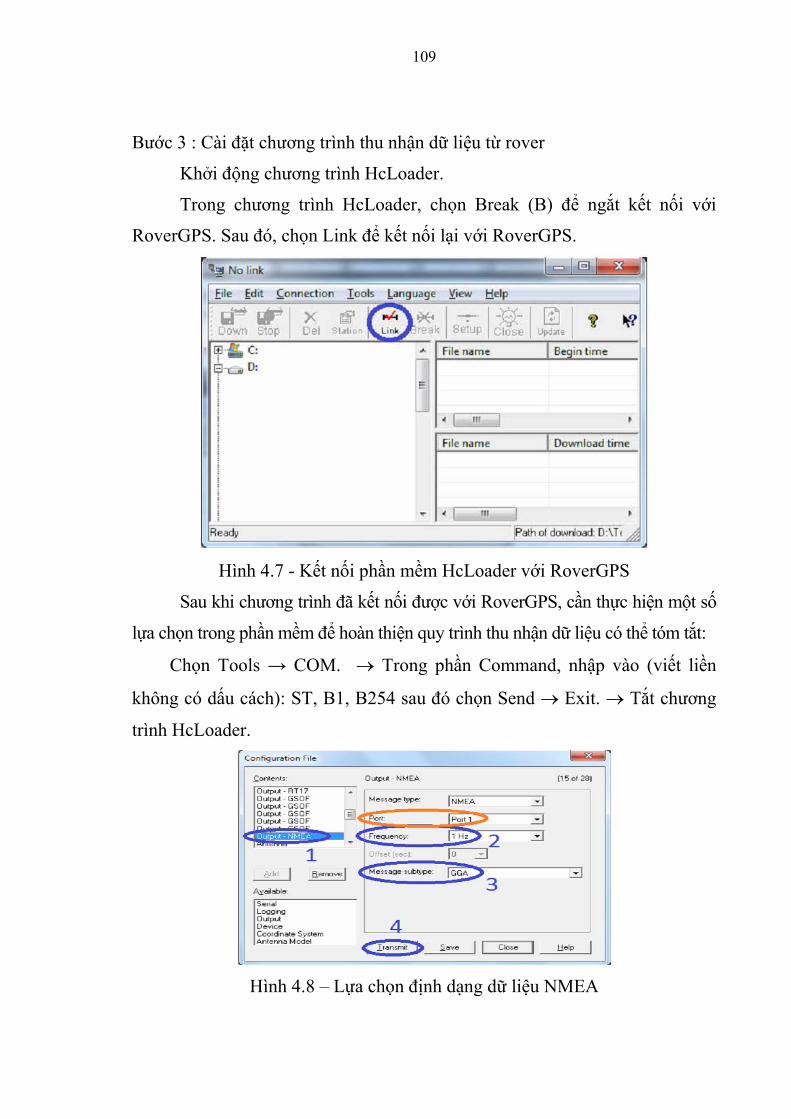
109
Bước 3 : Cài đặt chương trình thu nhận dữ liệu từ rover
Khởi động chương trình HcLoader.
Trong chương trình HcLoader, chọn Break (B) để ngắt kết nối với
RoverGPS. Sau đó, chọn Link để kết nối lại với RoverGPS.
Hình 4.7 - Kết nối phần mềm HcLoader với RoverGPS
Sau khi chương trình đã kết nối được với RoverGPS, cần thực hiện một số
lựa chọn trong phần mềm để hoàn thiện quy trình thu nhận dữ liệu có thể tóm tắt:
Chọn Tools → COM. → Trong phần Command, nhập vào (viết liền
không có dấu cách): ST, B1, B254 sau đó chọn Send → Exit. → Tắt chương
trình HcLoader.
Hình 4.8 – Lựa chọn định dạng dữ liệu NMEA
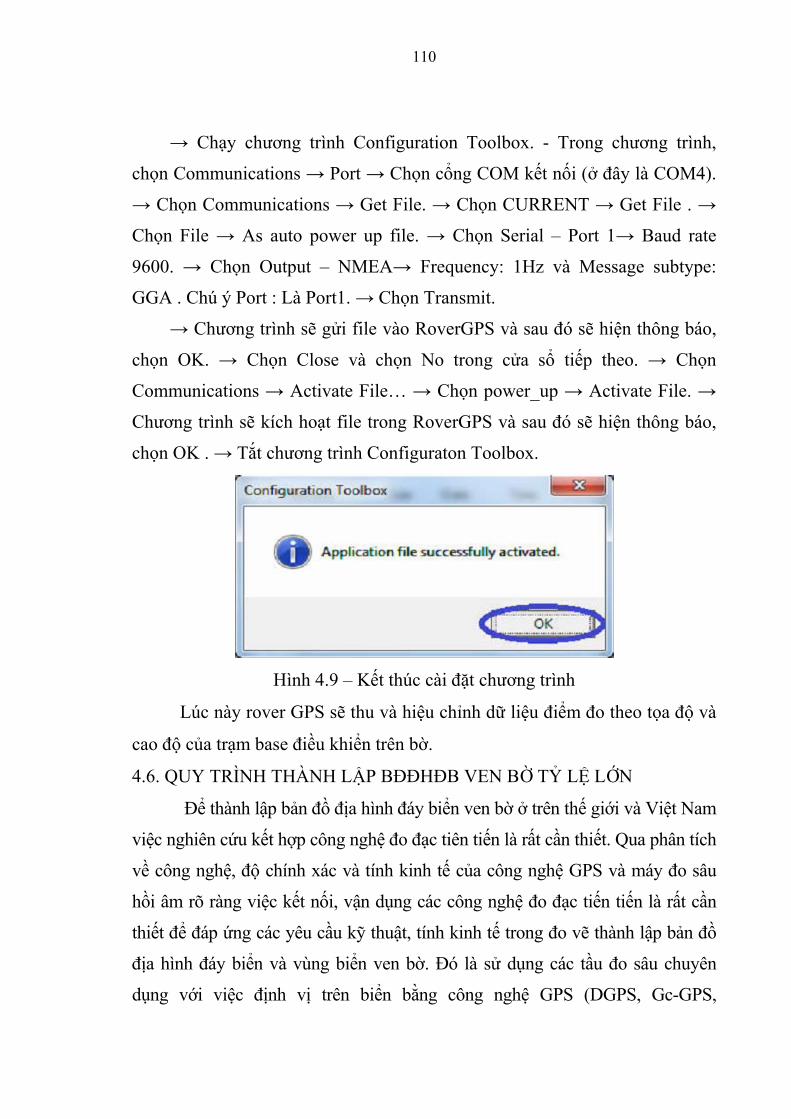
110
→ Chạy chương trình Configuration Toolbox. - Trong chương trình,
chọn Communications → Port → Chọn cổng COM kết nối (ở đây là COM4).
→ Chọn Communications → Get File. → Chọn CURRENT → Get File . →
Chọn File → As auto power up file. → Chọn Serial – Port 1→ Baud rate
9600. → Chọn Output – NMEA→ Frequency: 1Hz và Message subtype:
GGA . Chú ý Port : Là Port1. → Chọn Transmit.
→ Chương trình sẽ gửi file vào RoverGPS và sau đó sẽ hiện thông báo,
chọn OK. → Chọn Close và chọn No trong cửa sổ tiếp theo. → Chọn
Communications → Activate File… → Chọn power_up → Activate File. →
Chương trình sẽ kích hoạt file trong RoverGPS và sau đó sẽ hiện thông báo,
chọn OK . → Tắt chương trình Configuraton Toolbox.
Hình 4.9 – Kết thúc cài đặt chương trình
Lúc này rover GPS sẽ thu và hiệu chỉnh dữ liệu điểm đo theo tọa độ và
cao độ của trạm base điều khiển trên bờ.
4.6. QUY TRÌNH THÀNH LẬP BĐĐHĐB VEN BỜ TỶ LỆ LỚN
Để thành lập bản đồ địa hình đáy biển ven bờ ở trên thế giới và Việt Nam
việc nghiên cứu kết hợp công nghệ đo đạc tiên tiến là rất cần thiết. Qua phân tích
về công nghệ, độ chính xác và tính kinh tế của công nghệ GPS và máy đo sâu
hồi âm rõ ràng việc kết nối, vận dụng các công nghệ đo đạc tiến tiến là rất cần
thiết để đáp ứng các yêu cầu kỹ thuật, tính kinh tế trong đo vẽ thành lập bản đồ
địa hình đáy biển và vùng biển ven bờ. Đó là sử dụng các tầu đo sâu chuyên
dụng với việc định vị trên biển bằng công nghệ GPS (DGPS, Gc-GPS,
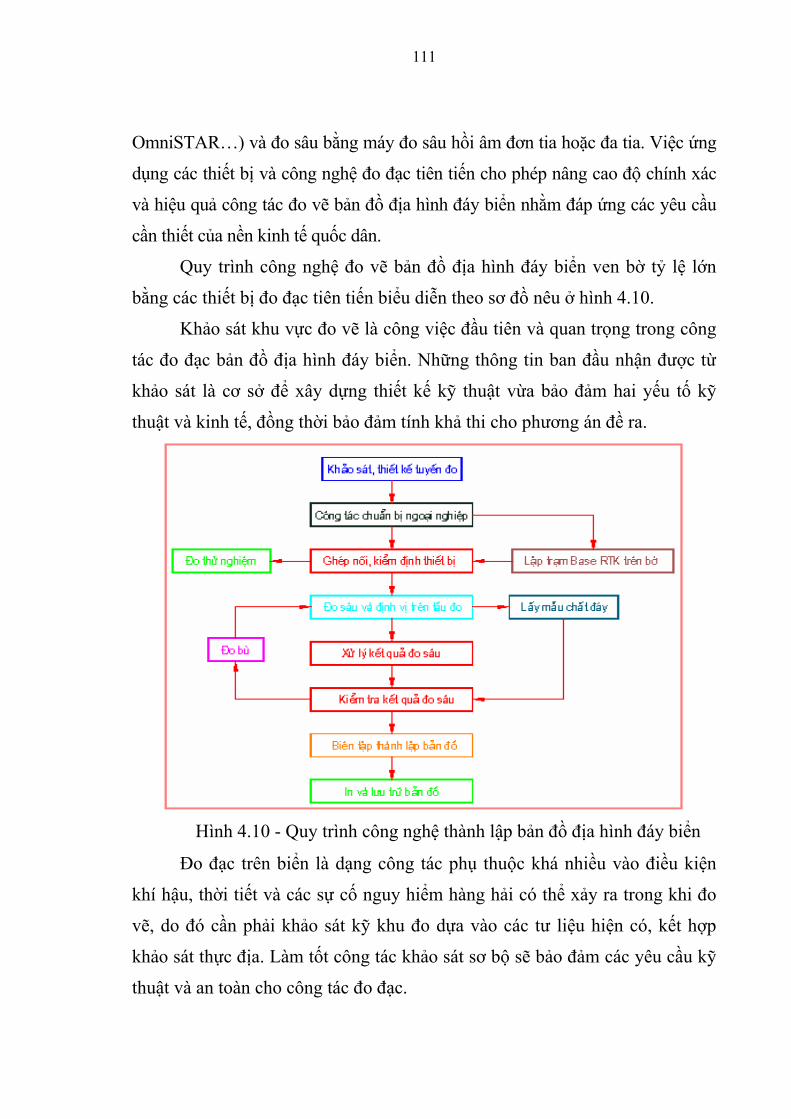
111
OmniSTAR…) và đo sâu bằng máy đo sâu hồi âm đơn tia hoặc đa tia. Việc ứng
dụng các thiết bị và công nghệ đo đạc tiên tiến cho phép nâng cao độ chính xác
và hiệu quả công tác đo vẽ bản đồ địa hình đáy biển nhằm đáp ứng các yêu cầu
cần thiết của nền kinh tế quốc dân.
Quy trình công nghệ đo vẽ bản đồ địa hình đáy biển ven bờ tỷ lệ lớn
bằng các thiết bị đo đạc tiên tiến biểu diễn theo sơ đồ nêu ở hình 4.10.
Khảo sát khu vực đo vẽ là công việc đầu tiên và quan trọng trong công
tác đo đạc bản đồ địa hình đáy biển. Những thông tin ban đầu nhận được từ
khảo sát là cơ sở để xây dựng thiết kế kỹ thuật vừa bảo đảm hai yếu tố kỹ
thuật và kinh tế, đồng thời bảo đảm tính khả thi cho phương án đề ra.
Hình 4.10 - Quy trình công nghệ thành lập bản đồ địa hình đáy biển
Đo đạc trên biển là dạng công tác phụ thuộc khá nhiều vào điều kiện
khí hậu, thời tiết và các sự cố nguy hiểm hàng hải có thể xảy ra trong khi đo
vẽ, do đó cần phải khảo sát kỹ khu đo dựa vào các tư liệu hiện có, kết hợp
khảo sát thực địa. Làm tốt công tác khảo sát sơ bộ sẽ bảo đảm các yêu cầu kỹ
thuật và an toàn cho công tác đo đạc.
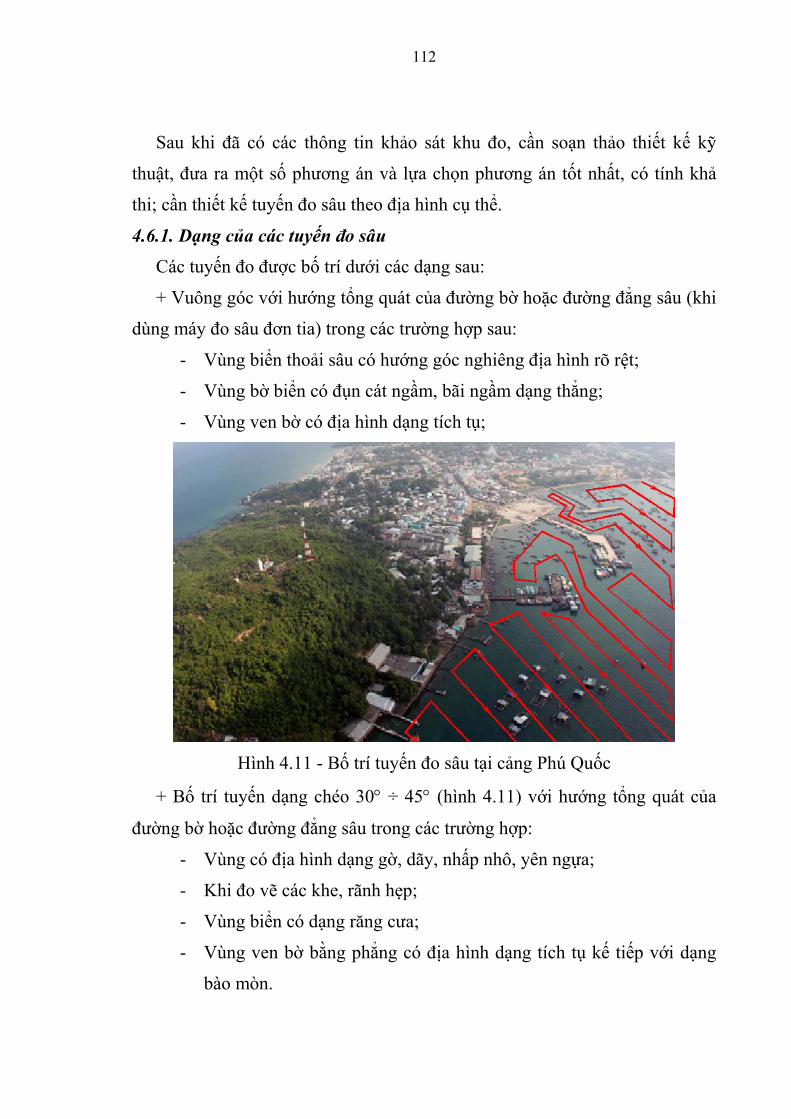
112
Sau khi đã có các thông tin khảo sát khu đo, cần soạn thảo thiết kế kỹ
thuật, đưa ra một số phương án và lựa chọn phương án tốt nhất, có tính khả
thi; cần thiết kế tuyến đo sâu theo địa hình cụ thể.
4.6.1. Dạng của các tuyến đo sâu
Các tuyến đo được bố trí dưới các dạng sau:
+ Vuông góc với hướng tổng quát của đường bờ hoặc đường đẳng sâu (khi
dùng máy đo sâu đơn tia) trong các trường hợp sau:
- Vùng biển thoải sâu có hướng góc nghiêng địa hình rõ rệt;
- Vùng bờ biển có đụn cát ngầm, bãi ngầm dạng thẳng;
- Vùng ven bờ có địa hình dạng tích tụ;
Hình 4.11 - Bố trí tuyến đo sâu tại cảng Phú Quốc
+ Bố trí tuyến dạng chéo 30° ÷ 45° (hình 4.11) với hướng tổng quát của
đường bờ hoặc đường đẳng sâu trong các trường hợp:
- Vùng có địa hình dạng gờ, dãy, nhấp nhô, yên ngựa;
- Khi đo vẽ các khe, rãnh hẹp;
- Vùng biển có dạng răng cưa;
- Vùng ven bờ bằng phẳng có địa hình dạng tích tụ kế tiếp với dạng
bào mòn.
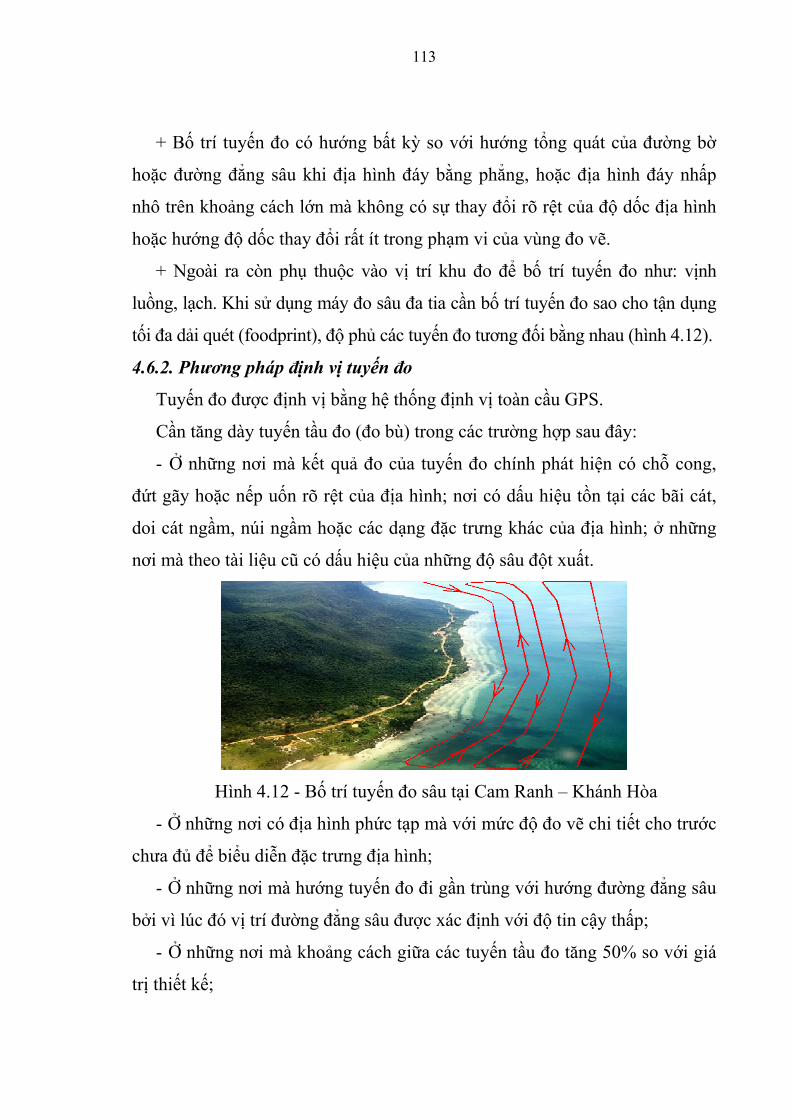
113
+ Bố trí tuyến đo có hướng bất kỳ so với hướng tổng quát của đường bờ
hoặc đường đẳng sâu khi địa hình đáy bằng phẳng, hoặc địa hình đáy nhấp
nhô trên khoảng cách lớn mà không có sự thay đổi rõ rệt của độ dốc địa hình
hoặc hướng độ dốc thay đổi rất ít trong phạm vi của vùng đo vẽ.
+ Ngoài ra còn phụ thuộc vào vị trí khu đo để bố trí tuyến đo như: vịnh
luồng, lạch. Khi sử dụng máy đo sâu đa tia cần bố trí tuyến đo sao cho tận dụng
tối đa dải quét (foodprint), độ phủ các tuyến đo tương đối bằng nhau (hình 4.12).
4.6.2. Phương pháp định vị tuyến đo
Tuyến đo được định vị bằng hệ thống định vị toàn cầu GPS.
Cần tăng dày tuyến tầu đo (đo bù) trong các trường hợp sau đây:
- Ở những nơi mà kết quả đo của tuyến đo chính phát hiện có chỗ cong,
đứt gãy hoặc nếp uốn rõ rệt của địa hình; nơi có dấu hiệu tồn tại các bãi cát,
doi cát ngầm, núi ngầm hoặc các dạng đặc trưng khác của địa hình; ở những
nơi mà theo tài liệu cũ có dấu hiệu của những độ sâu đột xuất.
Hình 4.12 - Bố trí tuyến đo sâu tại Cam Ranh – Khánh Hòa
- Ở những nơi có địa hình phức tạp mà với mức độ đo vẽ chi tiết cho trước
chưa đủ để biểu diễn đặc trưng địa hình;
- Ở những nơi mà hướng tuyến đo đi gần trùng với hướng đường đẳng sâu
bởi vì lúc đó vị trí đường đẳng sâu được xác định với độ tin cậy thấp;
- Ở những nơi mà khoảng cách giữa các tuyến tầu đo tăng 50% so với giá
trị thiết kế;
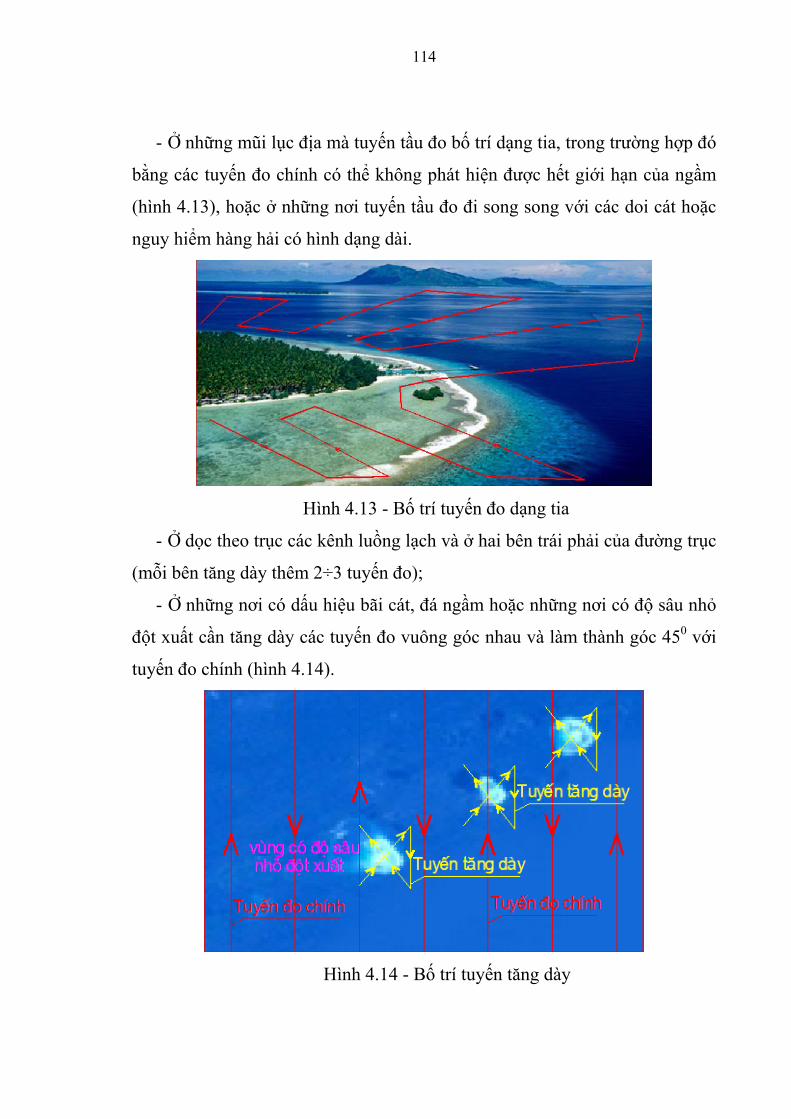
114
- Ở những mũi lục địa mà tuyến tầu đo bố trí dạng tia, trong trường hợp đó
bằng các tuyến đo chính có thể không phát hiện được hết giới hạn của ngầm
(hình 4.13), hoặc ở những nơi tuyến tầu đo đi song song với các doi cát hoặc
nguy hiểm hàng hải có hình dạng dài.
Hình 4.13 - Bố trí tuyến đo dạng tia
- Ở dọc theo trục các kênh luồng lạch và ở hai bên trái phải của đường trục
(mỗi bên tăng dày thêm 2÷3 tuyến đo);
- Ở những nơi có dấu hiệu bãi cát, đá ngầm hoặc những nơi có độ sâu nhỏ
đột xuất cần tăng dày các tuyến đo vuông góc nhau và làm thành góc 450 với
tuyến đo chính (hình 4.14).
Hình 4.14 - Bố trí tuyến tăng dày
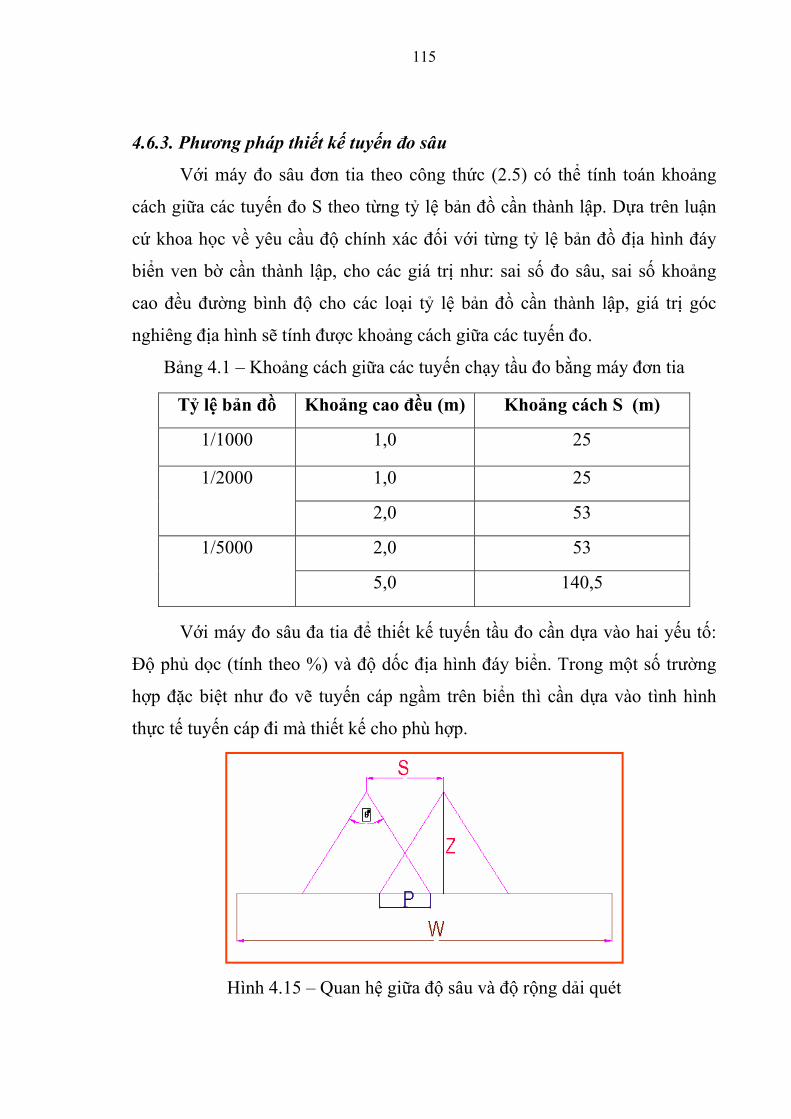
115
4.6.3. Phương pháp thiết kế tuyến đo sâu
Với máy đo sâu đơn tia theo công thức (2.5) có thể tính toán khoảng
cách giữa các tuyến đo S theo từng tỷ lệ bản đồ cần thành lập. Dựa trên luận
cứ khoa học về yêu cầu độ chính xác đối với từng tỷ lệ bản đồ địa hình đáy
biển ven bờ cần thành lập, cho các giá trị như: sai số đo sâu, sai số khoảng
cao đều đường bình độ cho các loại tỷ lệ bản đồ cần thành lập, giá trị góc
nghiêng địa hình sẽ tính được khoảng cách giữa các tuyến đo.
Bảng 4.1 – Khoảng cách giữa các tuyến chạy tầu đo bằng máy đơn tia
Tỷ lệ bản đồ Khoảng cao đều (m) Khoảng cách S (m)
1/1000 1,0 25
1,0 25 1/2000
2,0 53
2,0 53 1/5000
5,0 140,5
Với máy đo sâu đa tia để thiết kế tuyến tầu đo cần dựa vào hai yếu tố:
Độ phủ dọc (tính theo %) và độ dốc địa hình đáy biển. Trong một số trường
hợp đặc biệt như đo vẽ tuyến cáp ngầm trên biển thì cần dựa vào tình hình
thực tế tuyến cáp đi mà thiết kế cho phù hợp.
Hình 4.15 – Quan hệ giữa độ sâu và độ rộng dải quét
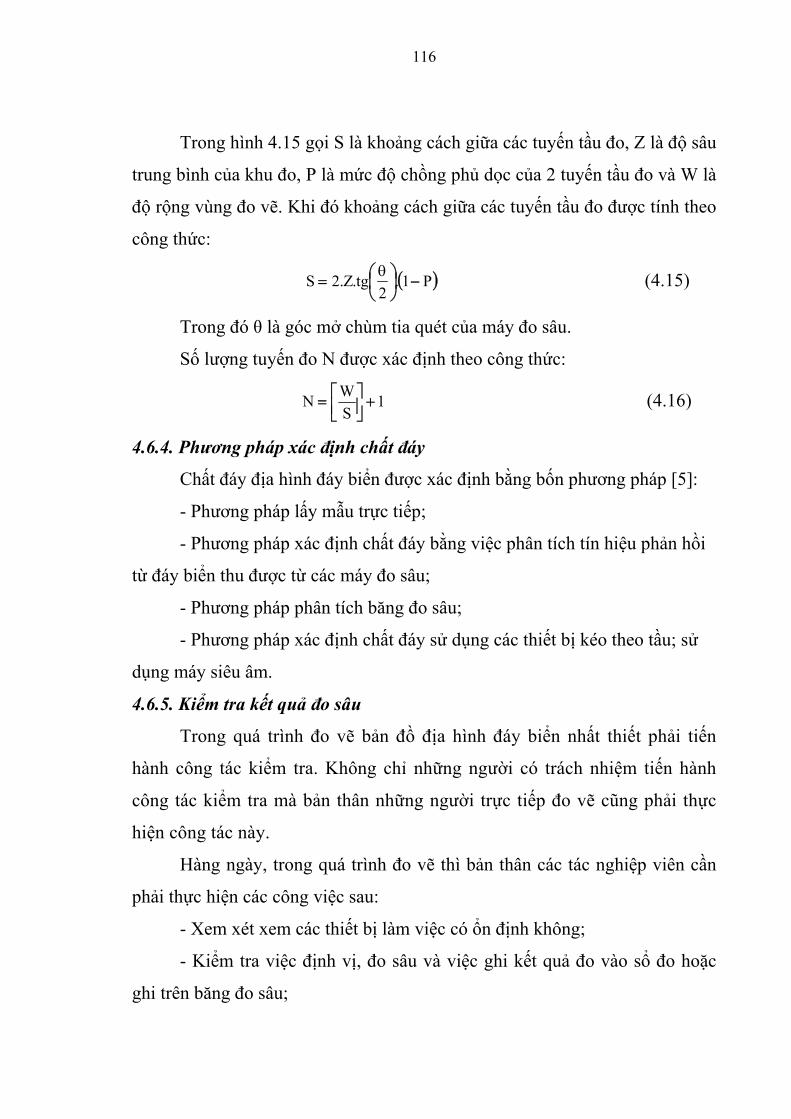
116
Trong hình 4.15 gọi S là khoảng cách giữa các tuyến tầu đo, Z là độ sâu
trung bình của khu đo, P là mức độ chồng phủ dọc của 2 tuyến tầu đo và W là
độ rộng vùng đo vẽ. Khi đó khoảng cách giữa các tuyến tầu đo được tính theo
công thức:
( )P1.2
tg.Z.2S −⎟⎠⎞
⎜⎝⎛=
θ (4.15)
Trong đó θ là góc mở chùm tia quét của máy đo sâu.
Số lượng tuyến đo N được xác định theo công thức:
1SWN +⎥⎦
⎤⎢⎣⎡= (4.16)
4.6.4. Phương pháp xác định chất đáy
Chất đáy địa hình đáy biển được xác định bằng bốn phương pháp [5]:
- Phương pháp lấy mẫu trực tiếp;
- Phương pháp xác định chất đáy bằng việc phân tích tín hiệu phản hồi
từ đáy biển thu được từ các máy đo sâu;
- Phương pháp phân tích băng đo sâu;
- Phương pháp xác định chất đáy sử dụng các thiết bị kéo theo tầu; sử
dụng máy siêu âm.
4.6.5. Kiểm tra kết quả đo sâu
Trong quá trình đo vẽ bản đồ địa hình đáy biển nhất thiết phải tiến
hành công tác kiểm tra. Không chỉ những người có trách nhiệm tiến hành
công tác kiểm tra mà bản thân những người trực tiếp đo vẽ cũng phải thực
hiện công tác này.
Hàng ngày, trong quá trình đo vẽ thì bản thân các tác nghiệp viên cần
phải thực hiện các công việc sau:
- Xem xét xem các thiết bị làm việc có ổn định không;
- Kiểm tra việc định vị, đo sâu và việc ghi kết quả đo vào sổ đo hoặc
ghi trên băng đo sâu;
117
- Kiểm tra việc lên các điểm độ sâu theo từng ngày đo, phát hiện mâu
thuẫn về giá trị độ sâu khi so sánh với các tuyến đo bên cạnh, kiểm tra sự
phù hợp giữa các giá trị độ sâu của tuyến đo với kết quả tuyến đo kiểm tra,
với độ sâu của bản vẽ bên cạnh và với độ sâu đo được trong những năm
trước đó;
- Phân tích kết quả đo nhằm phát hiện các đặc trưng địa hình đáy biển.
Các tuyến đo kiểm tra được thiết kế sao cho cắt các tuyến đo góc trong
khoảng 30 ÷ 1500, tốt nhất là khoảng 900. Mỗi một tuyến đo cần phải có ít
nhất ba điểm cắt với tuyến đo kiểm tra, ở những chỗ vũng, vịnh hẹp… thì
không ít hơn hai điểm cắt.
Tổng chiều dài tuyến đo kiểm tra không nhỏ hơn 10% tổng chiều dài
các tuyến đo.
Độ lệch giá trị ở giao điểm tuyến đo kiểm tra và tuyến đo vẽ chi tiết
không được có tính hệ thống.
Nếu ba điểm cắt của một tuyến đo chi tiết với tuyến đo kiểm tra có giá
trị độ lệch độ sâu cùng dấu thì phải tiến hành xem xét kỹ, tỷ mỷ để phát hiện
nguyên nhân, sau đó tìm biện pháp khắc phục.
Để đánh giá độ chính xác trong đo vẽ bản đồ địa hình cần dựa vào độ
lệch giữa độ sâu đo vẽ và giá trị độ sâu nhận được do các tuyến đo kiểm tra.
Từ đó tính được sai số trung phương của điểm đo sâu theo công thức:
n2
][MpΔΔ
±= (4.17)
Trong đó ∆ là số chênh độ sâu giữa tuyến đo sâu và tuyến đo kiểm tra
tại giao điểm của 2 tuyến đo; độ sâu tại giao điểm này được nội suy từ 2
điểm đo sâu gần nhất trước và sau giao điểm trên từng tuyến đo; n là số
lượng giao điểm.
118
4.6.6. Biên tập thành lập bản đồ địa hình đáy biển
Việc biên tập và thành lập bản đồ được tiến hành trên máy tính và các
phần mềm chuyên dụng.
Đưa các số liệu thu được trong quá trình xử lý số liệu vào phần mềm
chuyên dụng (AutoCad, Topo 3.0, Micro Station…) để thành lập bản đồ số trên
máy tính và bản đồ thành các file vẽ hoặc file lưu trữ theo quy phạm nhà nước.
Bản đồ số có thể được in ra hoặc lưu trữ trong các file dữ liệu dưới
dạng file .dgn hoặc .dxf để tiện quản lý và dễ dàng giao tiếp với các phần
mềm khác.
Số liệu đo đạc biển rất lớn, vì vậy toàn bộ quá trình trên bắt buộc phải
thực hiện bằng công nghệ tin học, theo một chu trình tự động hóa cao. Thông
thường các chức năng trình bày ở trên đều có các phần mềm chuyên dụng để
xử lý như phần mềm C-Nav, Hydro… Để đảm bảo độ chính xác thành lập bản
đồ địa hình đáy biển và nâng cao hiệu quả công việc, cần phải tiến hành trang
bị và sử dụng thành thạo các phần mềm chuyên dụng khi tiến hành đo vẽ và
xử lý số liệu thành lập bản đồ địa hình đáy biển.
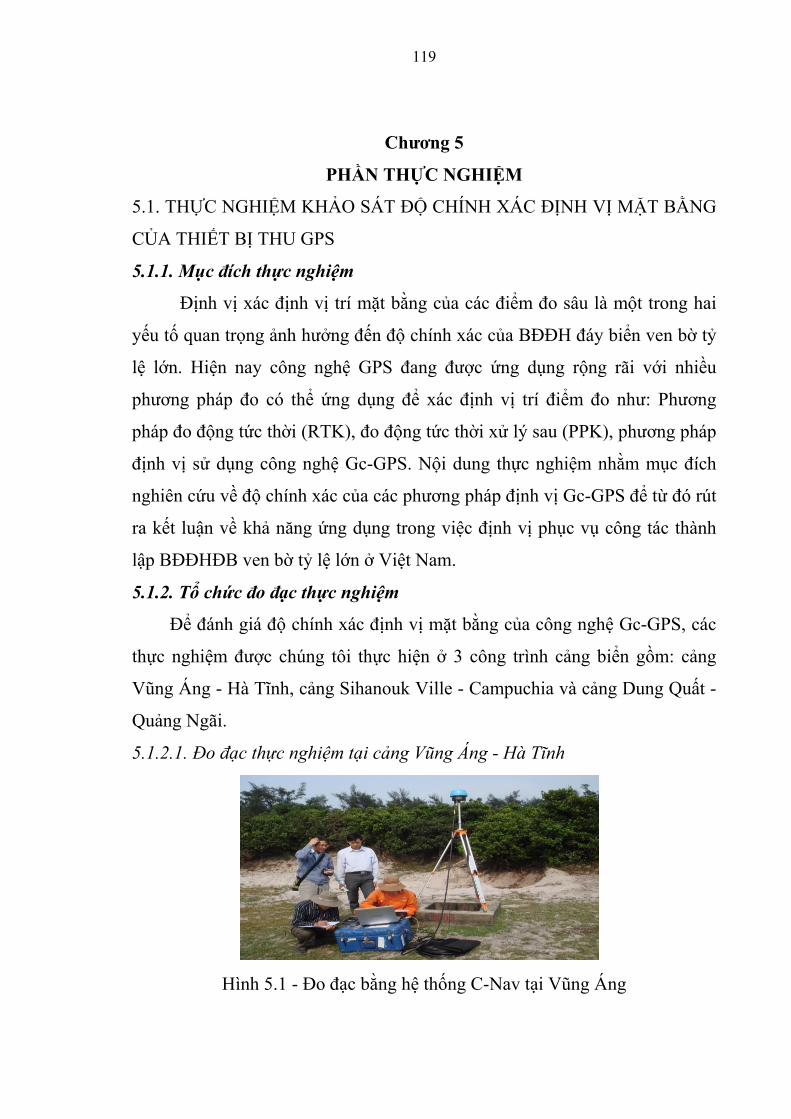
119
Chương 5
PHẦN THỰC NGHIỆM
5.1. THỰC NGHIỆM KHẢO SÁT ĐỘ CHÍNH XÁC ĐỊNH VỊ MẶT BẰNG
CỦA THIẾT BỊ THU GPS
5.1.1. Mục đích thực nghiệm
Định vị xác định vị trí mặt bằng của các điểm đo sâu là một trong hai
yếu tố quan trọng ảnh hưởng đến độ chính xác của BĐĐH đáy biển ven bờ tỷ
lệ lớn. Hiện nay công nghệ GPS đang được ứng dụng rộng rãi với nhiều
phương pháp đo có thể ứng dụng để xác định vị trí điểm đo như: Phương
pháp đo động tức thời (RTK), đo động tức thời xử lý sau (PPK), phương pháp
định vị sử dụng công nghệ Gc-GPS. Nội dung thực nghiệm nhằm mục đích
nghiên cứu về độ chính xác của các phương pháp định vị Gc-GPS để từ đó rút
ra kết luận về khả năng ứng dụng trong việc định vị phục vụ công tác thành
lập BĐĐHĐB ven bờ tỷ lệ lớn ở Việt Nam.
5.1.2. Tổ chức đo đạc thực nghiệm
Để đánh giá độ chính xác định vị mặt bằng của công nghệ Gc-GPS, các
thực nghiệm được chúng tôi thực hiện ở 3 công trình cảng biển gồm: cảng
Vũng Áng - Hà Tĩnh, cảng Sihanouk Ville - Campuchia và cảng Dung Quất -
Quảng Ngãi.
5.1.2.1. Đo đạc thực nghiệm tại cảng Vũng Áng - Hà Tĩnh
Hình 5.1 - Đo đạc bằng hệ thống C-Nav tại Vũng Áng
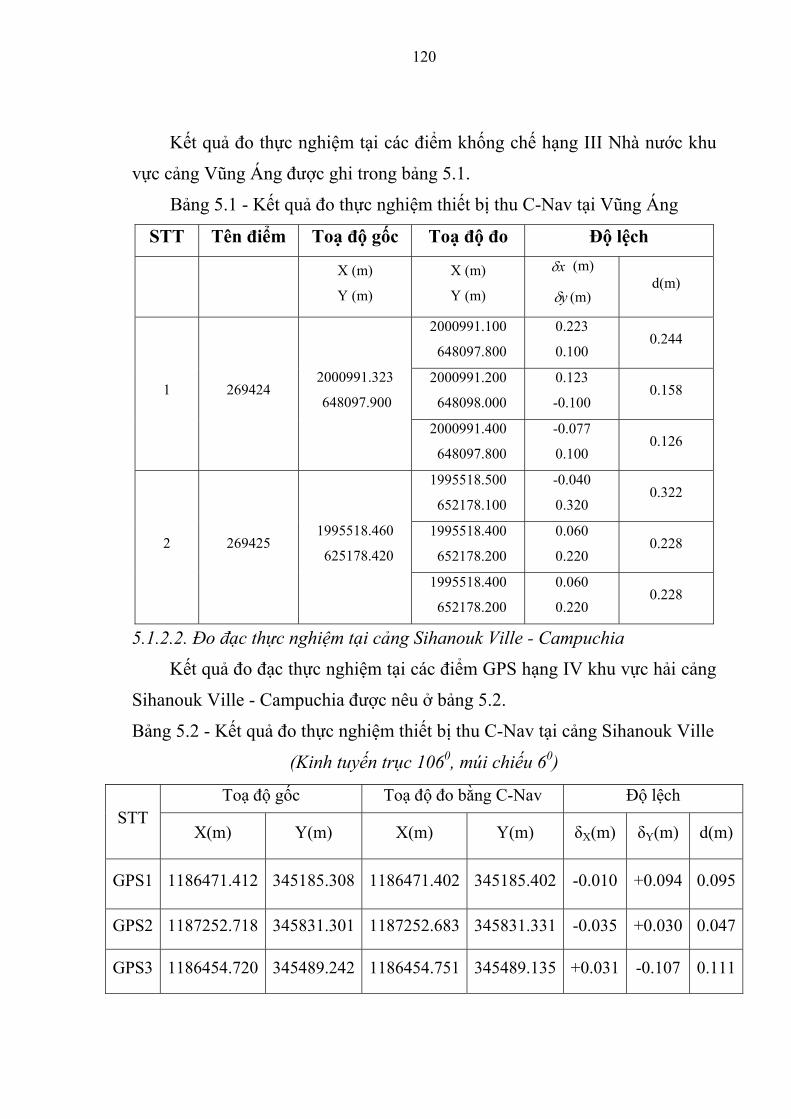
120
Kết quả đo thực nghiệm tại các điểm khống chế hạng III Nhà nước khu
vực cảng Vũng Áng được ghi trong bảng 5.1.
Bảng 5.1 - Kết quả đo thực nghiệm thiết bị thu C-Nav tại Vũng Áng
STT Tên điểm Toạ độ gốc Toạ độ đo Độ lệch
X (m)
Y (m)
X (m)
Y (m)
xδ (m)
yδ (m) d(m)
2000991.100
648097.800
0.223
0.100 0.244
2000991.200
648098.000
0.123
-0.100 0.158 1 269424
2000991.323
648097.900
2000991.400
648097.800
-0.077
0.100 0.126
1995518.500
652178.100
-0.040
0.320 0.322
1995518.400
652178.200
0.060
0.220 0.228 2 269425
1995518.460
625178.420
1995518.400
652178.200
0.060
0.220 0.228
5.1.2.2. Đo đạc thực nghiệm tại cảng Sihanouk Ville - Campuchia
Kết quả đo đạc thực nghiệm tại các điểm GPS hạng IV khu vực hải cảng
Sihanouk Ville - Campuchia được nêu ở bảng 5.2.
Bảng 5.2 - Kết quả đo thực nghiệm thiết bị thu C-Nav tại cảng Sihanouk Ville
(Kinh tuyến trục 1060, múi chiếu 60)
Toạ độ gốc Toạ độ đo bằng C-Nav Độ lệch STT
X(m) Y(m) X(m) Y(m) δX(m) δY(m) d(m)
GPS1 1186471.412 345185.308 1186471.402 345185.402 -0.010 +0.094 0.095
GPS2 1187252.718 345831.301 1187252.683 345831.331 -0.035 +0.030 0.047
GPS3 1186454.720 345489.242 1186454.751 345489.135 +0.031 -0.107 0.111
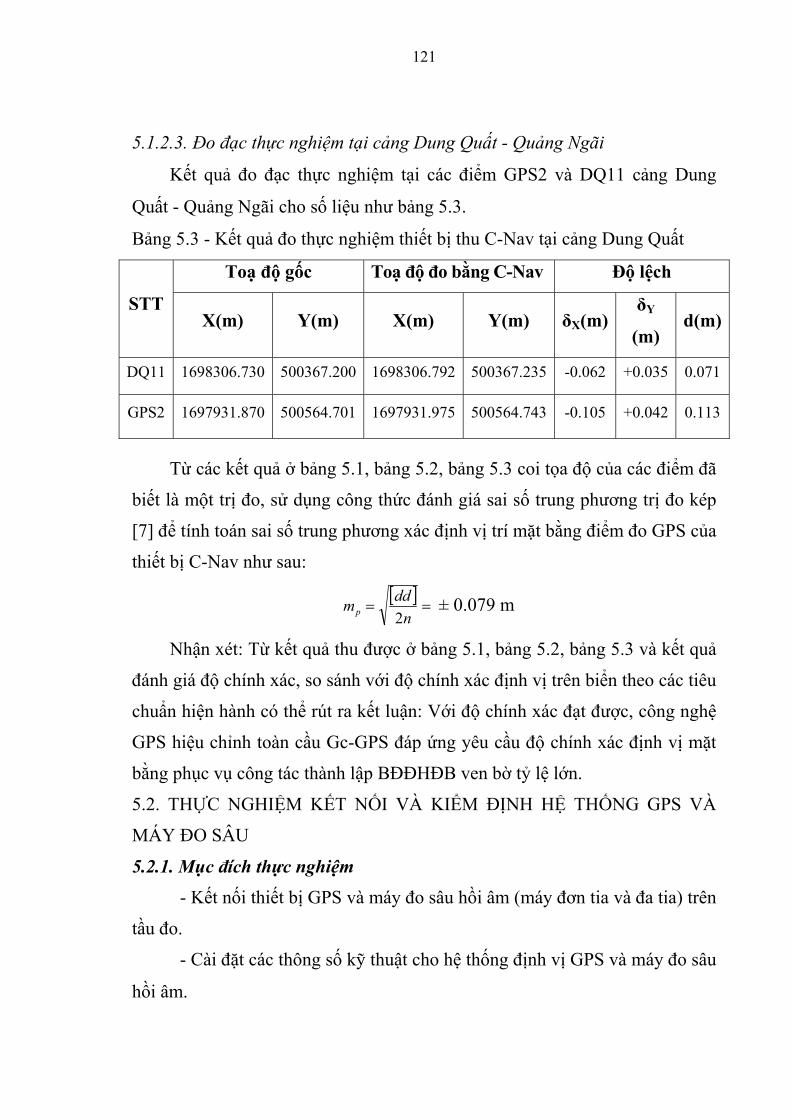
121
5.1.2.3. Đo đạc thực nghiệm tại cảng Dung Quất - Quảng Ngãi
Kết quả đo đạc thực nghiệm tại các điểm GPS2 và DQ11 cảng Dung
Quất - Quảng Ngãi cho số liệu như bảng 5.3.
Bảng 5.3 - Kết quả đo thực nghiệm thiết bị thu C-Nav tại cảng Dung Quất
Toạ độ gốc Toạ độ đo bằng C-Nav Độ lệch
STT X(m) Y(m) X(m) Y(m) δX(m)
δY
(m) d(m)
DQ11 1698306.730 500367.200 1698306.792 500367.235 -0.062 +0.035 0.071
GPS2 1697931.870 500564.701 1697931.975 500564.743 -0.105 +0.042 0.113
Từ các kết quả ở bảng 5.1, bảng 5.2, bảng 5.3 coi tọa độ của các điểm đã
biết là một trị đo, sử dụng công thức đánh giá sai số trung phương trị đo kép
[7] để tính toán sai số trung phương xác định vị trí mặt bằng điểm đo GPS của
thiết bị C-Nav như sau:
[ ]==
nddmp 2
± 0.079 m
Nhận xét: Từ kết quả thu được ở bảng 5.1, bảng 5.2, bảng 5.3 và kết quả
đánh giá độ chính xác, so sánh với độ chính xác định vị trên biển theo các tiêu
chuẩn hiện hành có thể rút ra kết luận: Với độ chính xác đạt được, công nghệ
GPS hiệu chỉnh toàn cầu Gc-GPS đáp ứng yêu cầu độ chính xác định vị mặt
bằng phục vụ công tác thành lập BĐĐHĐB ven bờ tỷ lệ lớn.
5.2. THỰC NGHIỆM KẾT NỐI VÀ KIỂM ĐỊNH HỆ THỐNG GPS VÀ
MÁY ĐO SÂU
5.2.1. Mục đích thực nghiệm
- Kết nối thiết bị GPS và máy đo sâu hồi âm (máy đơn tia và đa tia) trên
tầu đo.
- Cài đặt các thông số kỹ thuật cho hệ thống định vị GPS và máy đo sâu
hồi âm.
122
- Kiểm định và hiệu chỉnh các nguồn sai số không tránh khỏi khi lắp
đặt và khi tiến hành đo đạc như: tốc độ truyền âm, sai số phương vị, độ trễ
định vị, sai số lắc dọc, lắc ngang.
5.2.2. Thực nghiệm kết nối hệ thống GPS với máy đo sâu hồi âm đơn tia
Để thực hiện kết nối và thu nhận dữ liệu, tác giả đã thực hiện ghép nối hệ thống thu nhận dữ liệu vệ tinh GPS, phương pháp đo GPS-RTK, phương pháp thu Beacon và máy đo sâu Echotrac MKIII trên sông Hồng vào tháng 5 năm 2014.
Trong hình 5.2 trạm Base RTK đặt trên bờ tại mốc khống chế mặt bằng
và độ cao được dẫn từ mốc Quốc gia.
Hình 5.2 – Trạm Base đo RTK
Ở dưới tầu tiến hành ghép nối theo hai phương án:
+ Phương án 1: ăng ten GPS không trùng với cần phát biến máy đo sâu hồi
âm như hình 5.3.
Hình 5.3 – Lắp đặt vị trí ăng ten không trùng cần phát biến
123
+ Phương án 2: ăng ten GPS trùng với cần phát biến máy đo sâu hồi âm như
hình 5.4.
Hình 5.4 – Lắp đặt vị trí ăng ten trùng cần phát biến
Cả hai phương án kết nối lắp đặt ăng ten đều cho cùng một kết quả, tuy
nhiên tùy vào điều kiện cụ thể mà ứng dụng (trong trường hợp tầu đo không
có giá để lắp đặt có thể lắp đặt ăng ten theo phương án 1). Nếu lắp đặt theo
phương án 1 cần đo các khoảng cách ∆X và ∆Y để khai báo cho chương trình.
Trên tầu tiến hành ghép nối hệ thống GPS-RTK với máy đo sâu hồi âm
và máy tính sử dụng phần mềm Hydro như hình 5.5:
Hình 5.5 – Lắp đặt ghép nối hệ thống GPS và máy đo sâu hồi âm
Sau khi ghép nối tiến hành đo thử nghiệm, kết quả đo thực nghiệm như
hình 5.6:
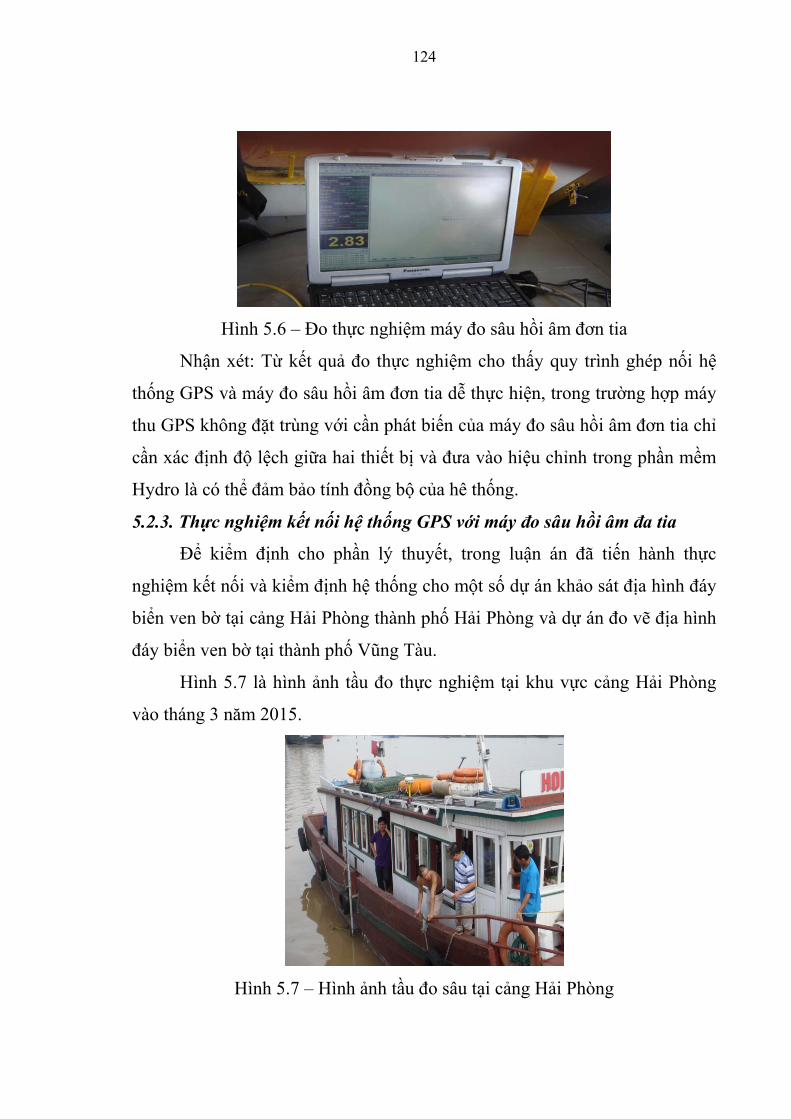
124
Hình 5.6 – Đo thực nghiệm máy đo sâu hồi âm đơn tia
Nhận xét: Từ kết quả đo thực nghiệm cho thấy quy trình ghép nối hệ
thống GPS và máy đo sâu hồi âm đơn tia dễ thực hiện, trong trường hợp máy
thu GPS không đặt trùng với cần phát biến của máy đo sâu hồi âm đơn tia chỉ
cần xác định độ lệch giữa hai thiết bị và đưa vào hiệu chỉnh trong phần mềm
Hydro là có thể đảm bảo tính đồng bộ của hê thống.
5.2.3. Thực nghiệm kết nối hệ thống GPS với máy đo sâu hồi âm đa tia
Để kiểm định cho phần lý thuyết, trong luận án đã tiến hành thực
nghiệm kết nối và kiểm định hệ thống cho một số dự án khảo sát địa hình đáy
biển ven bờ tại cảng Hải Phòng thành phố Hải Phòng và dự án đo vẽ địa hình
đáy biển ven bờ tại thành phố Vũng Tàu.
Hình 5.7 là hình ảnh tầu đo thực nghiệm tại khu vực cảng Hải Phòng
vào tháng 3 năm 2015.
Hình 5.7 – Hình ảnh tầu đo sâu tại cảng Hải Phòng
125
Hình 5.8 – Lắp đặt cần phát biến máy đo sâu trên tầu đo
Hình 5.9 – Lắp đặt ăng ten định vị trên tầu đo
Hình 5.10 – Kiểm định hệ thống GPS và mấy đo sâu hồi âm
Nhận xét: Từ kết quả ghép nối theo sơ đồ hình 3.30 và đo đạc thực
nghiệm tại cảng Hải Phòng cho thấy: Để đảm bảo độ chính xác đo vẽ bản đồ
địa hình đáy biển ven bờ tỷ lệ lớn cần phải tiến hành ghép nối và kiểm định hệ
thống GPS và máy đo sâu hồi âm nhằm xác định các tham số cần thiết để hiệu
126
chỉnh vào phần mềm chuyên dụng tự động hóa quá trình đo sâu và thu nhận
dữ liệu địa hình đáy biển.
Tại Vũng Tàu tiến hành thực nghiệm ghép nối và kiểm định hệ thống
máy đo sâu đa tia, độ trễ định vị và số hiệu chỉnh độ lệch phương vị.
Ghép nối hệ thống GPS và thủy âm là công việc hết sức quan trọng
quyết định sự thành công của dự án. Với lượng lớn các thiết bị đo, phụ kiện,
máy hiệu chỉnh các sai số đòi hỏi phải có kỹ sư điện tử trực tiếp lắp đặt vận
hành hệ thống.
Hình 5.11 – Ghép nối máy thu Gc-GPS với máy đa tia Sonic
Hình 5.12 - Kết nối hệ thống GPS và máy đo sâu đa tia
Sau khi kết nối, tiến hành các công tác kiểm định hệ thống GPS và máy
đo sâu hồi âm.
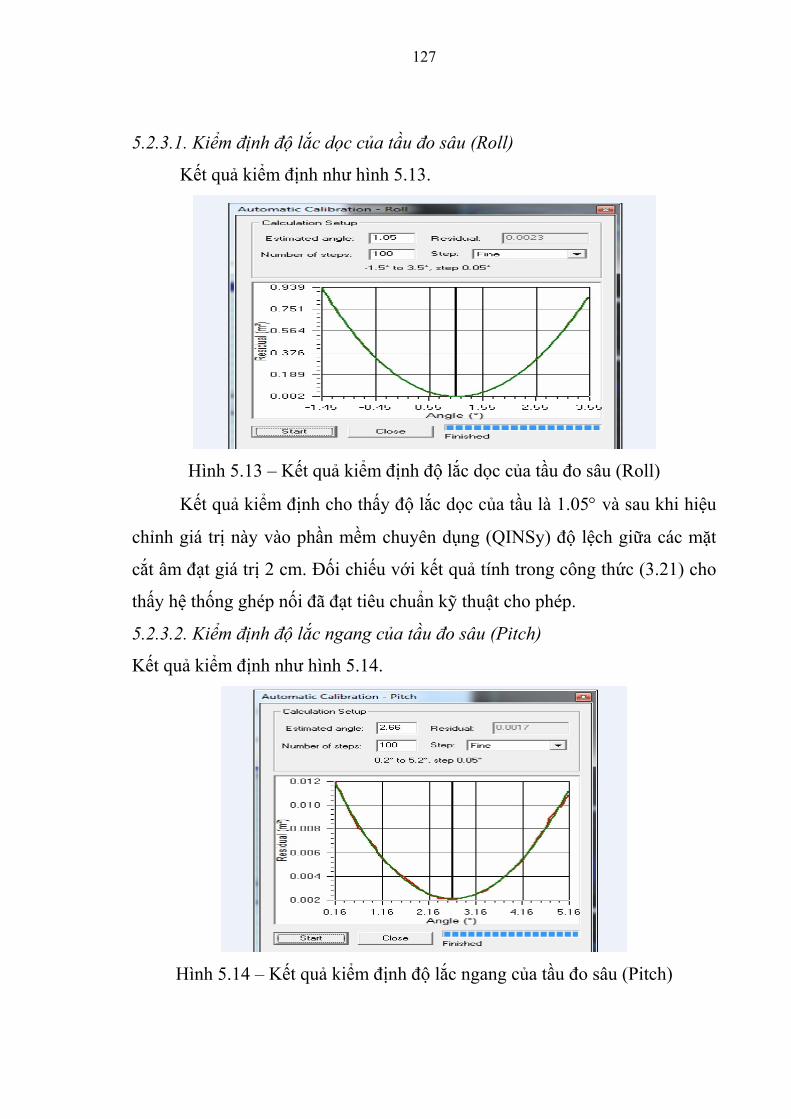
127
5.2.3.1. Kiểm định độ lắc dọc của tầu đo sâu (Roll)
Kết quả kiểm định như hình 5.13.
Hình 5.13 – Kết quả kiểm định độ lắc dọc của tầu đo sâu (Roll)
Kết quả kiểm định cho thấy độ lắc dọc của tầu là 1.05° và sau khi hiệu
chỉnh giá trị này vào phần mềm chuyên dụng (QINSy) độ lệch giữa các mặt
cắt âm đạt giá trị 2 cm. Đối chiếu với kết quả tính trong công thức (3.21) cho
thấy hệ thống ghép nối đã đạt tiêu chuẩn kỹ thuật cho phép.
5.2.3.2. Kiểm định độ lắc ngang của tầu đo sâu (Pitch)
Kết quả kiểm định như hình 5.14.
Hình 5.14 – Kết quả kiểm định độ lắc ngang của tầu đo sâu (Pitch)
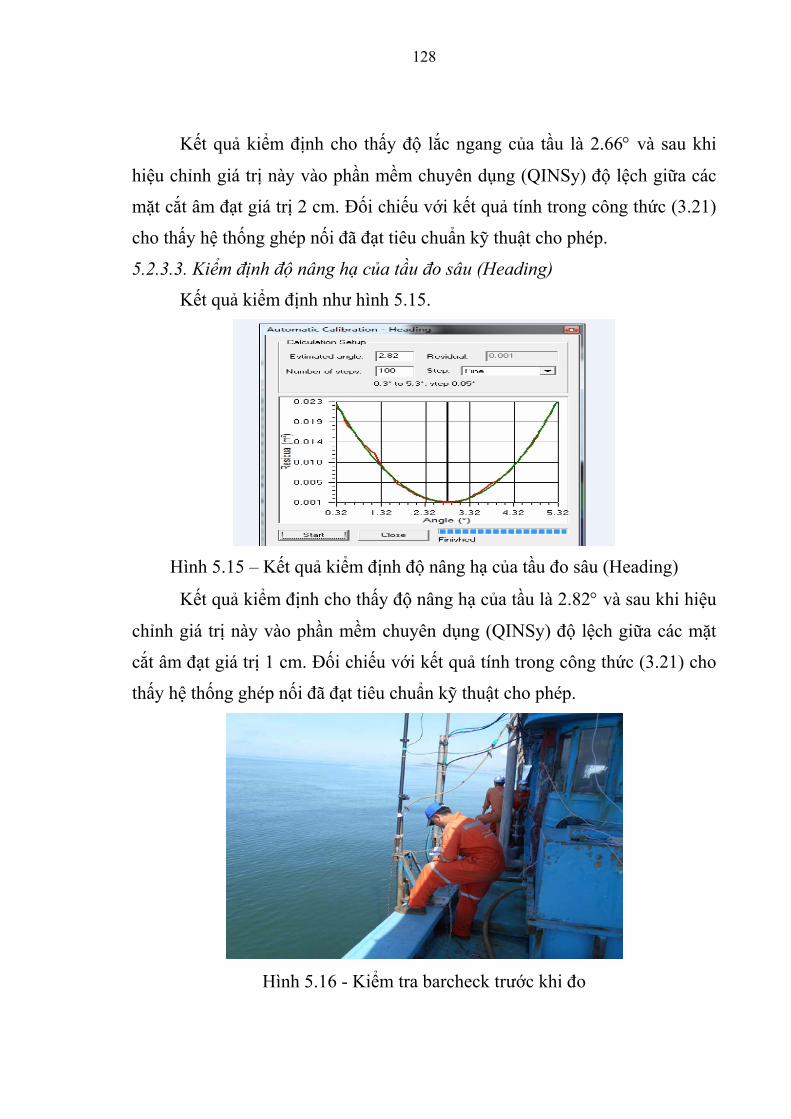
128
Kết quả kiểm định cho thấy độ lắc ngang của tầu là 2.66° và sau khi
hiệu chỉnh giá trị này vào phần mềm chuyên dụng (QINSy) độ lệch giữa các
mặt cắt âm đạt giá trị 2 cm. Đối chiếu với kết quả tính trong công thức (3.21)
cho thấy hệ thống ghép nối đã đạt tiêu chuẩn kỹ thuật cho phép.
5.2.3.3. Kiểm định độ nâng hạ của tầu đo sâu (Heading)
Kết quả kiểm định như hình 5.15.
Hình 5.15 – Kết quả kiểm định độ nâng hạ của tầu đo sâu (Heading)
Kết quả kiểm định cho thấy độ nâng hạ của tầu là 2.82° và sau khi hiệu
chỉnh giá trị này vào phần mềm chuyên dụng (QINSy) độ lệch giữa các mặt
cắt âm đạt giá trị 1 cm. Đối chiếu với kết quả tính trong công thức (3.21) cho
thấy hệ thống ghép nối đã đạt tiêu chuẩn kỹ thuật cho phép.
Hình 5.16 - Kiểm tra barcheck trước khi đo
129
Sau khi hiệu chỉnh các giá trị độ lắc dọc, lắc ngang, nâng hạ tầu …,
trước khi tiến hành đo chính thức cần tiến hành kiểm tra vận tốc truyền sóng
âm bằng phương pháp kiểm tra barcheck như hình 5.16. Số liệu độ sâu kiểm
định thu được cần chính xác đến cm. Khi đó quá trình kết nối kiểm định hệ
thống GPS và máy đo sâu mới kết thúc.
5.3. THỰC NGHIỆM ỨNG DỤNG CÔNG NGHỆ ĐO CAO GPS-RTK
TRONG ĐO SÂU ĐỂ THAY THẾ SỐ HIỆU CHỈNH THỦY TRIỀU
5.3.1. Giới thiệu chung
Vị trí thực nghiệm được tiến hành tại vùng biển Vũng Tàu (khu nghỉ
dưỡng Long Cung Resort như hình 5.17). Công tác đo đạc thực nghiệm được
kết hợp với dự án đo sâu đường cáp ngầm Quốc tế của Tập đoàn viễn thông
quân đội Viettel – Việt Nam.
Hình 5.17 - Vị trí khu đo thực nghiệm
5.3.2. Mục đích thực nghiệm
Thực nghiệm kiểm tra khả năng ứng dụng và độ chính xác đạt được của
công nghệ đo cao GPS - RTK kết hợp với máy đo sâu hồi âm trong đo vẽ bản
130
đồ địa hình đáy biển ven bờ. Xử lý đồng thời 2 kết quả so sánh đối chiếu để
đưa ra kết luận khi ứng dụng công nghệ đo cao GPS-RTK thay thế số hiệu
chỉnh thủy triều.
5.3.3. Số liệu gốc để tính toán thực nghiệm
Bảng 5.4 - Số liệu gốc để tính toán đo đạc thực nghiệm
Tên điểm X Y HTĐ hTC Ghi chú
659486 1144558.303 727769.459 4.802 5.740 Đặt trạm Base 1
659487 1149635.020 733809.885 1.221 2.115 Điểm kiểm tra
P1 1147461.005 732869.015 5.351 6.245 Đặt trạm Base 2
Hệ toạ độ VN 2000- Kinh tuyến trục 1070 45', múi chiếu 30
Trong bảng 5.4 điểm 659486 là điểm đặt trạm Base số 1, từ điểm này
đo đạc trạm Rover vào điểm kiểm tra 659487 và xác định điểm đặt trạm Base
2 gần vị trí tiếp bờ của dự án.
Số liệu quan trắc thủy triều trong thời gian đo thực nghiệm được lấy từ
trạm hải văn cố định tại Vũng Tàu (hình 5.18). Số liệu quan trắc thủy triều tại
trạm được ghi theo tần xuất 1 giờ/lần. Kết quả quan trắc được thể hiện trong
phụ lục 3.
Hình 5.18 – Trạm hải văn Vũng Tàu

131
5.3.4. Tổ chức đo đạc thực nghiệm
5.3.4.1. Phần kết nối thiết bị
Công tác đo đạc thực nghiệm được tiến hành độc lập với dự án đo sâu
đường cáp ngầm Quốc tế của Tập đoàn viễn thông quân đội Viettel. Máy đo
sâu đơn tia ECHOTRAC MKIII được chúng tôi sử dụng với mục đích so sánh
kết quả đo sâu của máy đa tia được dùng trong dự án (hình 5.19).
Hình 5.19 - Máy đo sâu đơn tia ECHOTRAC MKIII
Máy đo sâu đa tia được dùng trong thực nghiệm là máy R2SONIC –
2024 cùng các thiết bị kèm theo (hình 5.20).
Hình 5.20 - Máy đo sâu R2SONIC – 2024
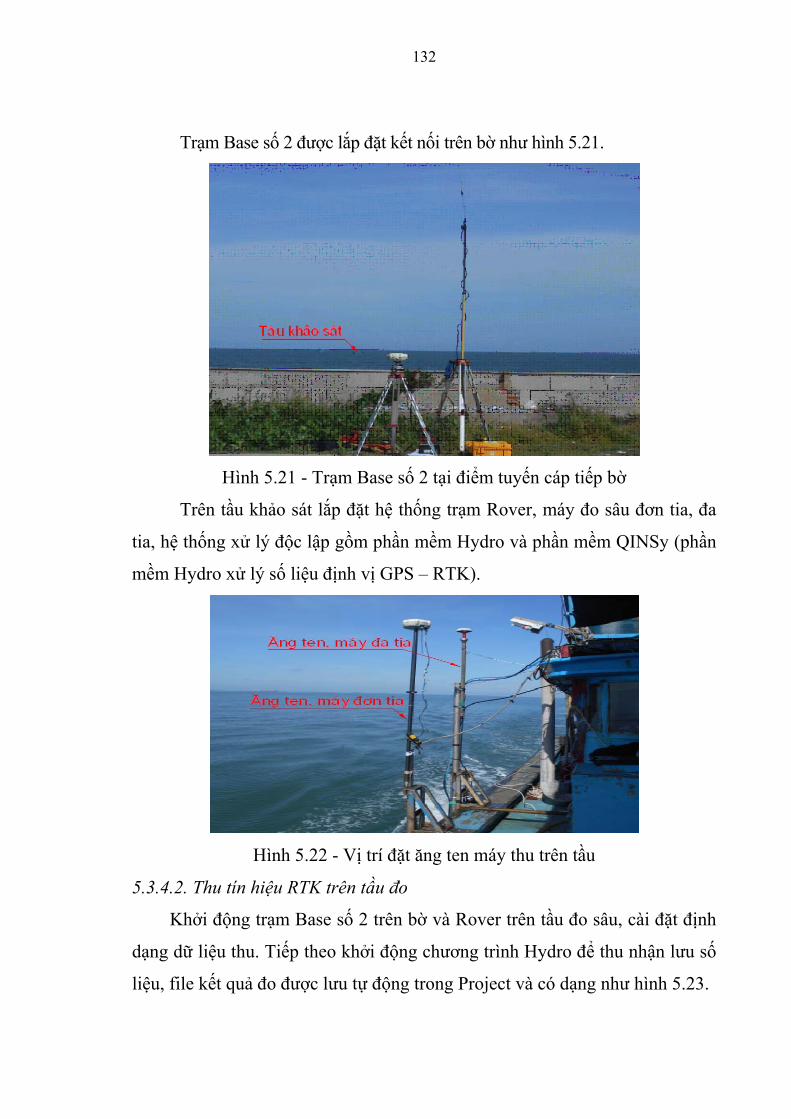
132
Trạm Base số 2 được lắp đặt kết nối trên bờ như hình 5.21.
Hình 5.21 - Trạm Base số 2 tại điểm tuyến cáp tiếp bờ
Trên tầu khảo sát lắp đặt hệ thống trạm Rover, máy đo sâu đơn tia, đa
tia, hệ thống xử lý độc lập gồm phần mềm Hydro và phần mềm QINSy (phần
mềm Hydro xử lý số liệu định vị GPS – RTK).
Hình 5.22 - Vị trí đặt ăng ten máy thu trên tầu
5.3.4.2. Thu tín hiệu RTK trên tầu đo
Khởi động trạm Base số 2 trên bờ và Rover trên tầu đo sâu, cài đặt định
dạng dữ liệu thu. Tiếp theo khởi động chương trình Hydro để thu nhận lưu số
liệu, file kết quả đo được lưu tự động trong Project và có dạng như hình 5.23.
133
Hình 5.23 - Định dạng file dữ liệu đo RTK
Từ kết quả đo cao GPS- RTK nhận được X, Y, H, thời gian, thứ tự điểm,
bằng việc đồng bộ thời gian với kết quả đo sâu thay vào các công thức (4.4)
và (4.8) với các trị đo thực nghiệm là: ΔH = 288 cm; d = 58 cm; Lăngten =
385cm.
Kết quả đo đạc được xử lý theo 2 phương pháp:
- Tính độ sâu theo số liệu đo quan trắc thủy triều theo công thức (4.1)
và (4.2): h1
- Tính độ sâu đáy biển trực tiếp từ cao độ ăng ten RTK theo công
thức (4.7) và (4.8): h2
- Tính độ lệch của giá trị độ sâu tại cùng một điểm đo theo hai
phương pháp:
di = (h1)i - (h2)i (5.1)
- Tính sai số trung phương của phép đo theo công thức [7]:
n2
]dd[m = (5.2)
Kết quả tính toán cụ thể được trình bầy trong phụ lục 1 và phụ lục 2:
sai số trung phương đo sâu địa hình đáy biển của phương pháp đo sâu ứng
dụng công nghệ đo cao GPS-RTK so với phương pháp đo sâu truyền thống sử
dụng số liệu đo thủy triều đạt giá trị: m = ± 5,6 cm.
134
Với kết quả thu được trong trong phần thực nghiệm có thể đi đến các
nhận xét:
- Để đảm bảo độ chính xác thành lập bản đồ địa hình đáy biển ven bờ tỷ
lệ lớn phục vụ khảo sát thiết kế các công trình ven biển cần phải tiến hành
ghép nối và kiểm định hệ thống định vị vệ tinh GPS và máy đo sâu hồi âm.
- Kết quả đo đạc thực nghiệm cho thấy: độ chính xác xác định độ sâu
giữa 2 phương pháp đo sâu tương đương nhau, tuy nhiên phương pháp hiệu
chỉnh số liệu đo sâu theo quan trắc số liệu thủy triều rất phức tạp, tốn kém chi
phí, tiềm ẩn nhiều nguồn sai số và độ chính xác còn tùy thuộc vào từng
vùng biển do biên độ thủy triều ven bờ ở nước ta thay đổi lớn từ 3 ÷ 5 m,
trong khi đó phương pháp đo cao GPS-RTK thực hiện thuận lợi và có tính
linh hoạt hơn.
- Có thể sử dụng phương pháp đo cao GPS - RTK để tiến hành đo vẽ
bản đồ địa hình đáy biển ven bờ tỷ lệ lớn phục vụ khảo sát thiết kế các công
trình ven biển. Phương pháp này còn rất hiệu quả khi đo đạc bản đồ địa hình
đáy biển ven bờ vùng cửa sông, vùng biển có hiện tượng dòng chảy đối lưu.
135
KẾT LUẬN VÀ KIẾN NGHỊ
KẾT LUẬN Việc nghiên cứu ứng dụng công nghệ và thiết bị hiện đại dùng cho đo
vẽ bản đồ địa hình đáy biển tỷ lệ lớn phù hợp với điều kiện và tiêu chuẩn kỹ thuật của Việt Nam là rất cần thiết. Từ những kết quả nghiên cứu lý thuyết và đo đạc thực nghiệm có thể rút ra một số kết luận như sau:
1. Để đo vẽ bản đồ địa hình đáy biển ven bờ tỷ lệ lớn nên ứng dụng kết quả nghiên cứu của luận án về chỉ tiêu độ chính xác và quy trình công nghệ đo vẽ thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn phục vụ khảo sát thiết kế các công trình ven biển ở Việt Nam.
2. Do các thiết bị GPS và máy đo sâu hồi âm là các thiết bị tách biệt nhau nên trong hoàn cảnh cụ thể đo đạc BĐĐHĐB ven bờ tỷ lệ lớn ở Việt Nam, để đảm bảo các yêu cầu kỹ thuật đặt ra cần phải kết nối, kiểm định hệ thống GPS và máy đo sâu hồi âm theo quy trình phù hợp đã trình bầy trong luận án.
3. Có thể ứng dụng phương pháp đo cao GPS - RTK kết hợp với máy đo sâu hồi âm trong đo vẽ bản đồ địa hình đáy biển ven bờ tỷ lệ lớn. Kết quả nghiên cứu này sẽ cho phép nâng cao độ chính xác và tính hiệu quả trong công tác khảo sát thiết kế phục vụ thi công xây dựng các công trình ven biển ở Việt Nam, giảm được công việc xây dựng các trạm nghiệm triều và quan trắc thủy triều trong đo sâu. KIẾN NGHỊ
Hiện nay, ở nước ta có rất nhiều công trình trên biển đã, đang và sẽ triển khai không chỉ trong phạm vị ven bờ mà cả ngoài khơi cách xa đất liền hàng trăm hải lý. Vì vậy mà cần phải:
1. Tiếp tục nghiên cứu ứng dụng công nghệ đo đạc tiên tiến trên biển nhằm nâng cao hiệu quả công tác đo vẽ thành lập bản đồ địa hình đáy biển ở nước ta.
2. Tiếp tục nghiên cứu và hoàn thiện các chỉ tiêu kỹ thuật và quy trình thành lập BĐ ĐHĐB ven bờ tỷ lệ lớn ở Việt Nam.
136
DANH MỤC CÁC CÔNG TRÌNH ĐÃ CÔNG BỐ CỦA TÁC GIẢ
1. Phạm Văn Quang (2008), “Ứng dụng kỹ thuật đo GPS động tức thời
(RTK) trong bố trí các công trình dạng tuyến” , Tạp chí Khoa học Kỹ
thuật Mỏ - Địa chất, (số 22 – 4/2008).
2. Phạm Văn Quang, Diêm Công Trang (2014), “Nghiên cứu máy đo sâu
hồi âm đa tia và khả năng ứng dụng trong công tác khảo sát công trình
ở Việt Nam” , Tạp chí Khoa học Công nghệ xây dựng, (số 3/2014).
3. Phạm Văn Quang (2015), “ Nghiên cứu đánh giá khả năng ứng dụng
một số phương pháp định vị trên biển bằng công nghệ GPS trong việc
thành lập bản đồ địa hình đáy biển ven bờ ở Việt Nam”, Tạp chí Khoa
học Đo đạc và Bản đồ, (số 24 – 6/2015).
4. Trần Viết Tuấn, Phạm Văn Quang, Hoàng Ngọc Thê (2015), “Nghiên
cứu ứng dụng công nghệ RTK thành lập bản đồ địa hình đáy biển ven
bờ tỷ lệ lớn”, Tạp chí Tài nguyên và Môi trường, (số 21 – 11/2015).
5. Trần Viết Tuấn, Phạm Văn Quang, Nguyễn Minh Thể (2016), “ Nghiên
cứu ứng dụng công nghệ đo cao GPS để thành lập bản đồ địa hình đáy
biển ven bờ tỷ lệ lớn”, Tạp chí Khoa học Đo đạc và Bản đồ, (số 27 –
3/2016).
137
TÀI LIỆU THAM KHẢO
Tiếng Việt 1. Đặng Nam Chinh (2010), Nghiên cứu hoàn thiện các chỉ tiêu kỹ thuật
và quy trình công nghệ đo đạc biển ở Việt Nam, Báo cáo tổng kết đề tài KH&CN cấp bộ (Bộ Giáo dục và Đào tạo). Mã số: B-2007-02-35, 8/2010.
2. Đặng Nam Chinh, Nguyễn Xuân Tùng, Nguyễn Phúc Chính, Dương Mạnh Cường (2014), Tính độ lệch dây dọi dựa trên mô hình trọng trường Trái đất – EGM2008 và số cải chính độ nghiêng cục bộ của Geoid vào chênh cao xác định bằng công nghệ GPS động, Báo cáo khoa học, Hội nghị khoa học Trường Đại học Mỏ - Địa chất lần thứ 21.
3. Lê Trung Chơn (2003), Trắc địa biển, Nxb Đại học Quốc gia TP Hồ Chí Minh.
4. Nguyễn Công Cường, Đo vẽ bản đồ địa hình đáy biển, Trung tâm khoa học, Cục Đo đạc và Bản đồ nhà nước. Hà Nội – 1990.
5. Phạm Trung Dũng (2010), Nghiên cứu ứng dụng công nghệ đo sâu hồi âm trong trắc địa công trình biển, Luận văn thạc sĩ kỹ thuật, Trường Đại học Mỏ-Địa chất, Hà Nội.
6. Đỗ Ngọc Đường, Đặng Nam Chinh (2009), Bài giảng công nghệ GPS, Trường Đại học Mỏ - Địa chất, Hà nội.
7. Hoàng Ngọc Hà, Trương Quang Hiếu (1999), Cơ sở toán học xử lý số liệu trắc địa, Trường Đại học Mỏ - Địa chất, Hà nội.
8. Hoàng Nghĩa Hán (2007), Ứng dụng công nghệ mới trong công tác đo đạc địa hình đáy biển ở Việt Nam, Luận văn thạc sĩ kỹ thuật, Trường Đại học Mỏ-Địa chất, Hà Nội.
9. Phan Văn Hiến (1998), Bài giảng trắc địa công trình biển (Dùng cho học viên cao học), Trường Đại học Mỏ - Địa chất, Hà nội.
10. Phan Văn Hiến và nnk (2003), Nghiên cứu ứng dụng công nghệ GPS trong trắc địa công trình, Báo cáo tổng kết đề tài NCKH cấp bộ (Bộ Giáo dục và Đào tạo); Mã số: B2001 - 36 - 23, 5/2003.
138
11. Phan Văn Hiến, Nguyễn Duy Đô (2013), Giáo trình cơ sở trắc địa công trình, Nxb Khoa học kỹ thuật Hà Nội.
12. Nguyễn Văn Hiệp (2009), Nghiên cứu ứng dụng công nghệ GPS trong trắc địa công trình biển ở Việt nam, Luận văn thạc sĩ kỹ thuật, Đại học Mỏ-Địa chất,Hà Nội.
13. Phạm Hoàng Lân (1998), Cơ sở Trắc địa biển, Bài giảng cho học viên cao học Trắc địa, Đại học Mỏ -Địa chất Hà Nội.
14. Dương Quốc Lương, Ứng dụng công nghệ mới trong đo đạc và thành lập bản đồ địa hình đáy biển, Tạp chí Trắc địa-Bản đồ, Hội Trắc địa-Bản đồ-Viễn thám Việt Nam - số 1-2008.
15. Hoàng Trần Phương (2008), Nghiên cứu đặc tính kỹ thuật của máy đo sâu hồi âm đa tia ATLAS HYDROSWEEP MD-2 và khả năng ứng dụng trong công tác đo vẽ bản đồ địa hình đáy biển, Luận văn thạc sĩ kỹ thuật, Đại học Mỏ-Địa chất,Hà Nội.
16. Đào Xuân Quang (2007 ),Công nghệ khảo sát trong các dự án công trình biển, ( EGS Việt Nam, Hà Nội).
17. Phạm Văn Quang (2008), Nghiên cứu ứng dụng GPS động trong bố trí các công trình dạng tuyến, Luận văn thạc sĩ kỹ thuật, Đại học Mỏ-Địa chất,Hà Nội.
18. Phạm Văn Quang (2014), “ Nghiên cứu đánh giá khả năng ứng dụng một số phương pháp định vị trên biển bằng công nghệ GPS trong việc thành lập bản đồ địa hình đáy biển ven bờ ở Việt Nam”, Tạp chí khoa học đo đạc và Bản đồ, (số 24 – 6/2015), tr 24 – 29.
19. Phạm Vọng Thành (1995), Đo vẽ địa hình đáy biển, Bài giảng cho học viên cao học Trắc địa, Trường Đại học Mỏ -Địa chất Hà Nội.
20. Lương Ngọc Thanh và nnk (1997), Nghiên cứu quy trình công nghệ tự động hoá công tác đo vẽ bản đồ địa hình đáy biển, Báo cáo tổng kết đề tài NCKH, Viện Khoa học và công nghệ Địa chính, Hà Nội.
21. Nguyễn Quang Thắng, Trần Viết Tuấn (2009), Trắc địa công trình biển, Bài giảng cho học viên cao học Trắc địa, Trường Đại học Mỏ -Địa chất Hà Nội.
139
22. Trần Viết Tuấn, Nguyễn Văn Hiệp (2009), “Nghiên cứu khả năng ứng dụng công nghệ GPS hiệu chỉnh toàn cầu (Gc-GPS) trong trắc địa công trình biển ở Việt Nam”, Tạp chí Khoa học kỹ thuật Mỏ - Địa chất (số 27), Trường Đại học Mỏ - Địa chất, Hà Nội.
23. Trần Viết Tuấn, Phạm Doãn Mậu (2011), Giáo trình trắc địa biển, Nhà xuất bản Khoa học kỹ thuật.
24. Trần Viết Tuấn (2013), Nghiên cứu một số giải pháp công nghệ trong đo vẽ bản đồ địa hình đáy biển ven bờ phục vụ khảo sát thiết kế các công trình cảng biển Việt Nam, Tạp chí Khoa học Đo đạc và Bản đồ, số 16 năm 2013.
25. Trần Viết Tuấn, Phạm Văn Quang, Hoàng Ngọc Thê (2015), “Nghiên cứu ứng dụng công nghệ RTK thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn”, Tạp chí Tài nguyên và Môi trường, số 21 năm 2015.
26. Trần Viết Tuấn, Phạm Văn Quang, Nguyễn Minh Thể (2016), “ Nghiên cứu ứng dụng công nghệ đo cao GPS để thành lập bản đồ địa hình đáy biển ven bờ tỷ lệ lớn”, Tạp chí Khoa học Đo đạc và Bản đồ, số 27 năm 2016.
27. Quy định kỹ thuật thành lập bản đồ địa hình đáy biển tỷ lệ 1:50000, Bộ Tài nguyên và Môi trường – tháng 2-2007.
28. Quy định cơ sở toán học, độ chính xác nội dung và ký hiệu bản đồ địa hình đáy biển tỷ lệ 1:10000. Tổng cục Địa chính – 1998.
29. Thông tư số 24/2010/TT-BTNMT của Bộ tài nguyên và Môi trường, “Quy định về đo đạc, thành lập bản đồ địa hình đáy biển bằng máy đo sâu hồi âm đa tia”.
30. TCXDVN 309-2004, TCVN9398-2012, Công tác trắc địa trong xây dựng công trình – yêu cầu chung.
31. 96 TCN 43-90, Quy phạm đo vẽ địa hình. Tiếng Anh:
32. A Division of C&C Technologies (2003), C-Nav GPS System Operations Manual, Washington DC.
33. A.E. Ingham, Hydrography for the surveyor and engineer
140
34. Alex Osborne, Lam Kai Wing. GcGPS for offshore tide measurement, Geomatics World.
35. David T. Sand Well, Bathymetric Estimation, University of California, San Diego-1999.
36. Edwin Dason, Understanding Lidar bathymetry for shallow waters and coastal mapping, XXIII FIG Congress – Munich, Germany, October 8-13,2006.
37. Jamie MacMahan, Hydrographic surveying from personal watercraft, Journal of Surveying Engineering, February 2001.
38. Kongsberg maritime AS (2010), Reference for SIS with EM 3002 39. Neptune training course, Kongsberg 2010 40. Reha Metin Alkan, GPS-single point positioning without selective
availability, Department of Geodesy and photogrammetry Eng, Istanbul Technical University, Turrkey 2001.
41. Trimble R7 GNSS, USA 42. Sis & EM 710 training course, Kongsberg 2010 43. Sonic(2010), Sonic2024/2022 Broadband – Multibeam Ecnosounders -
Operation manual V2.0 44. U.S Army Corps Engineers (2004), Engineering and Design
Hydrographic surveying, Department of the Army, Washington DC.
Tiếng Nga: 45. Нинитеико Ю.п., Семенов В.И., Каморный В.М. Топографо – геодезические работьі на шельфа далнеґо востока. ГиК 1978 Ν.1
Trang Web:
46. www.cwbdiving.com 47. www.Eye4software.com 48. www.Kongsbergmaritime.com 49. www.Seamap.com 50. www.thsoa.org/hy99 51. www.Trimble.com
141
PHẦN PHỤ LỤC
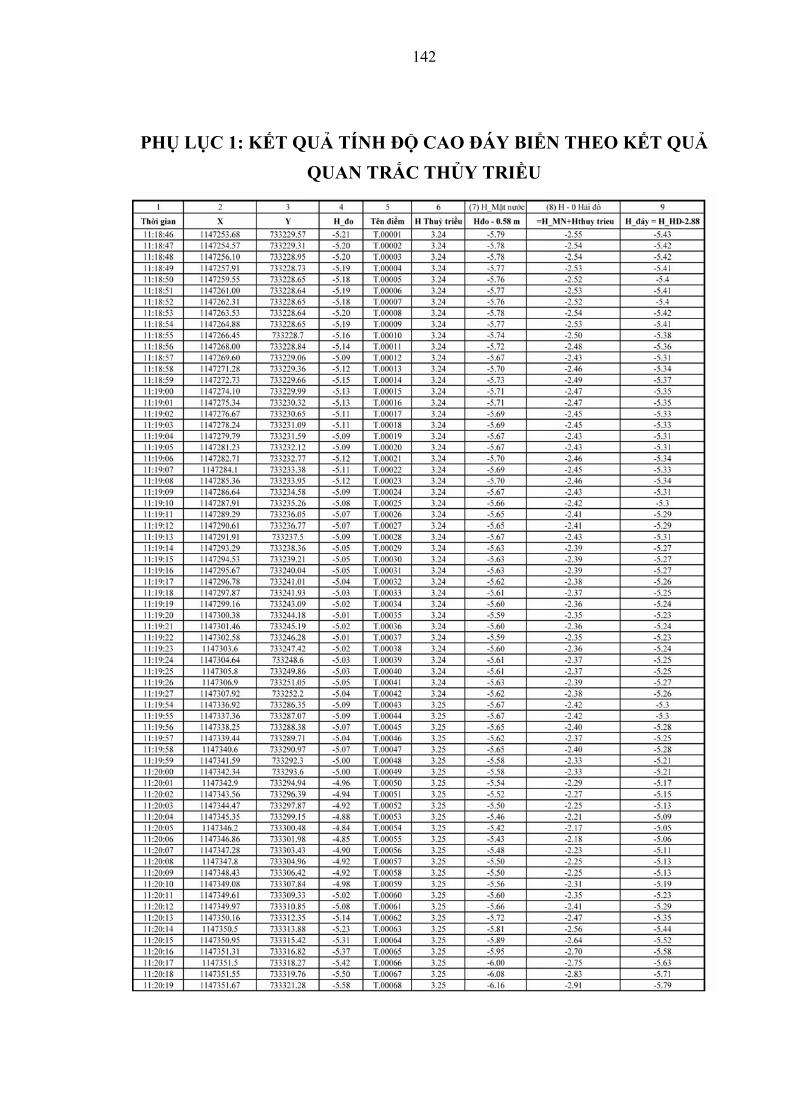
142
PHỤ LỤC 1: KẾT QUẢ TÍNH ĐỘ CAO ĐÁY BIỂN THEO KẾT QUẢ QUAN TRẮC THỦY TRIỀU
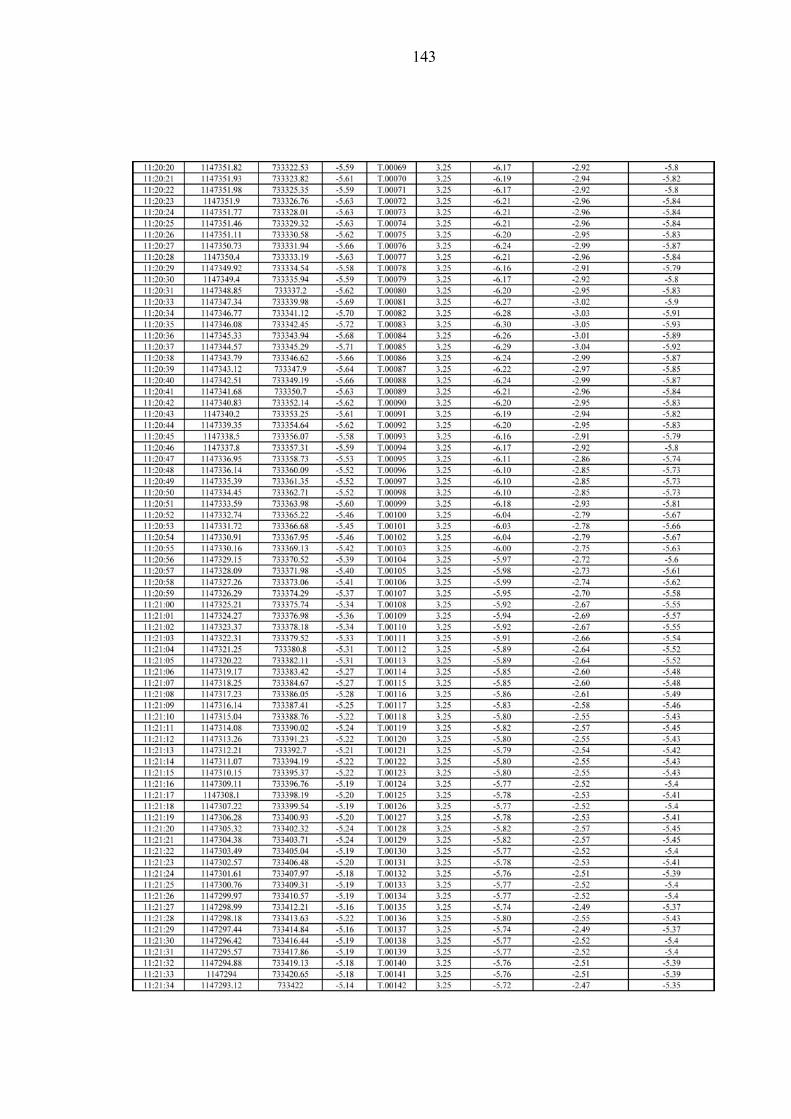
143
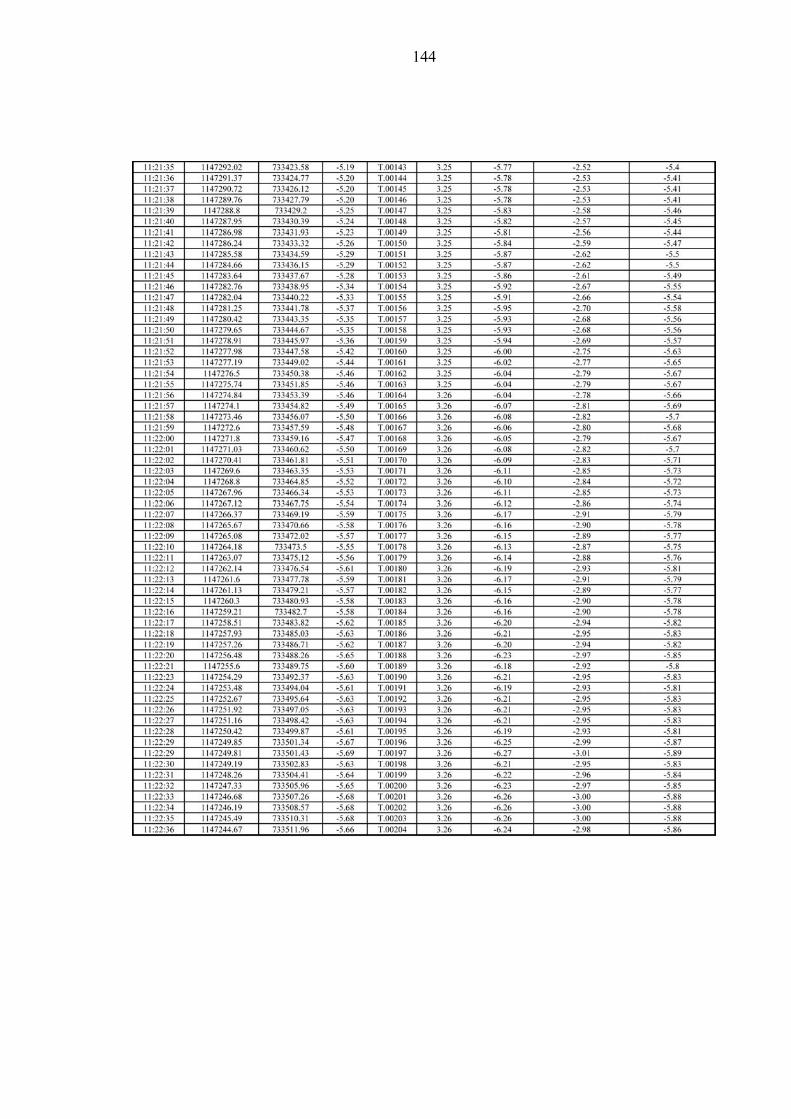
144
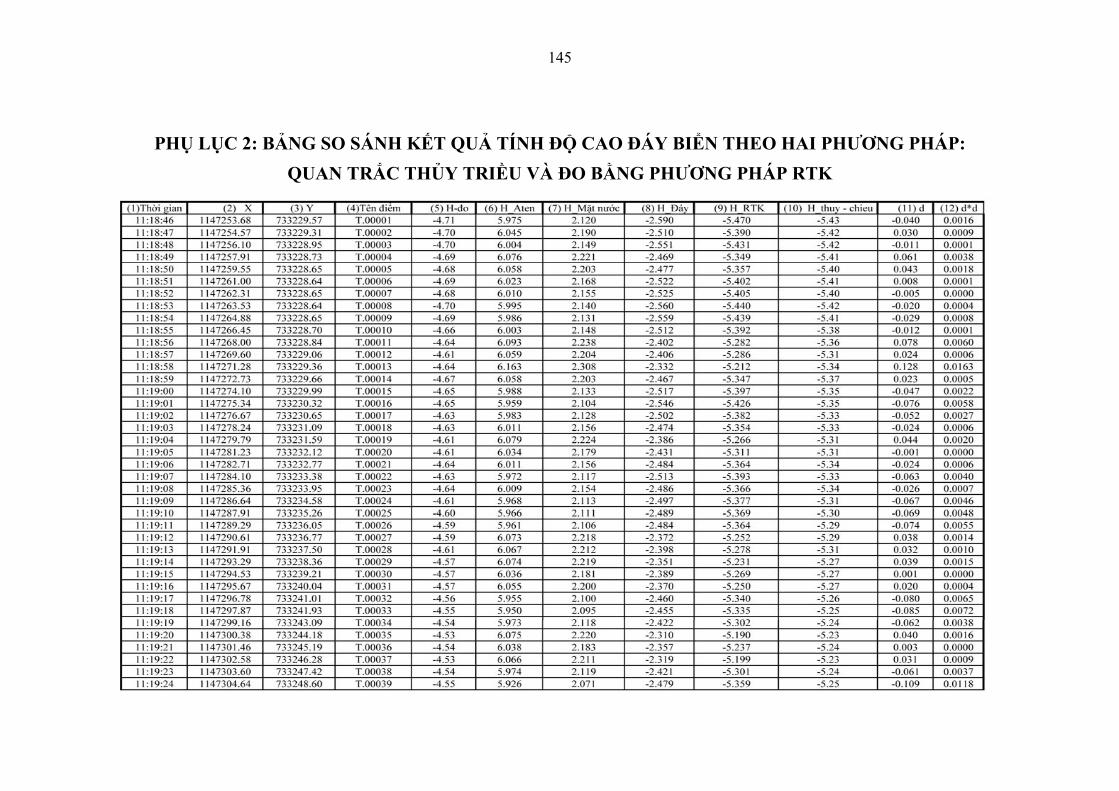
145
PHỤ LỤC 2: BẢNG SO SÁNH KẾT QUẢ TÍNH ĐỘ CAO ĐÁY BIỂN THEO HAI PHƯƠNG PHÁP: QUAN TRẮC THỦY TRIỀU VÀ ĐO BẰNG PHƯƠNG PHÁP RTK
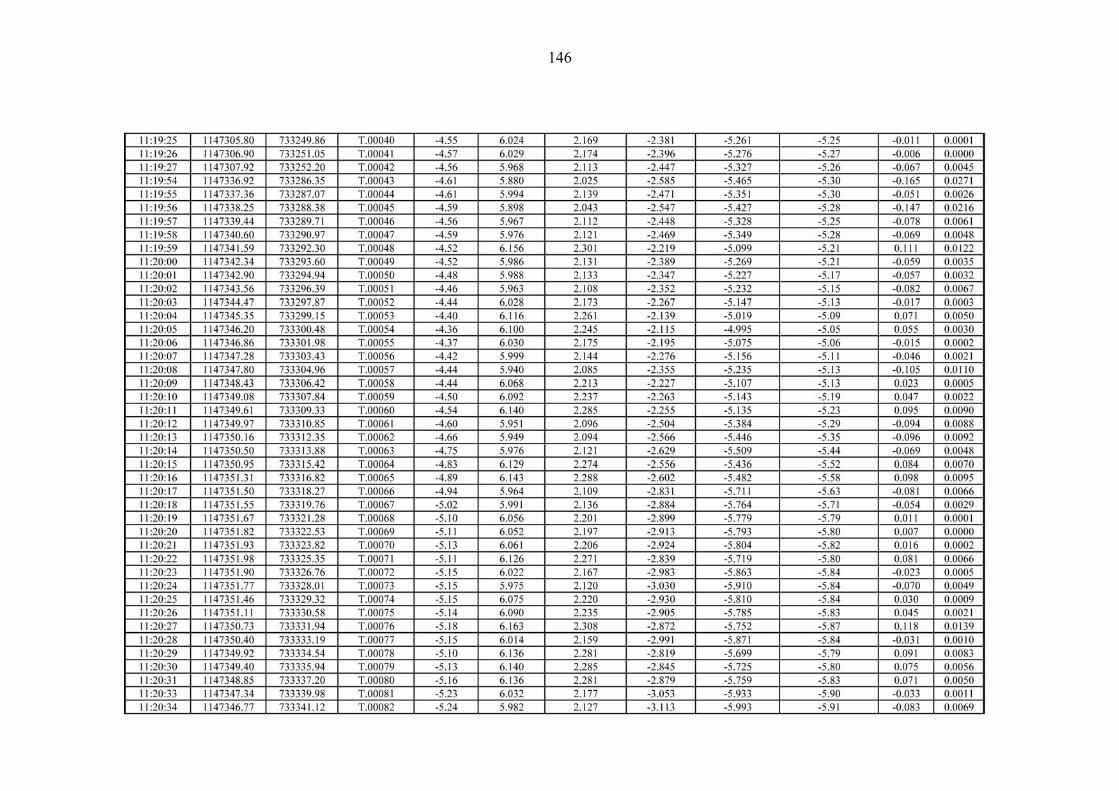
146
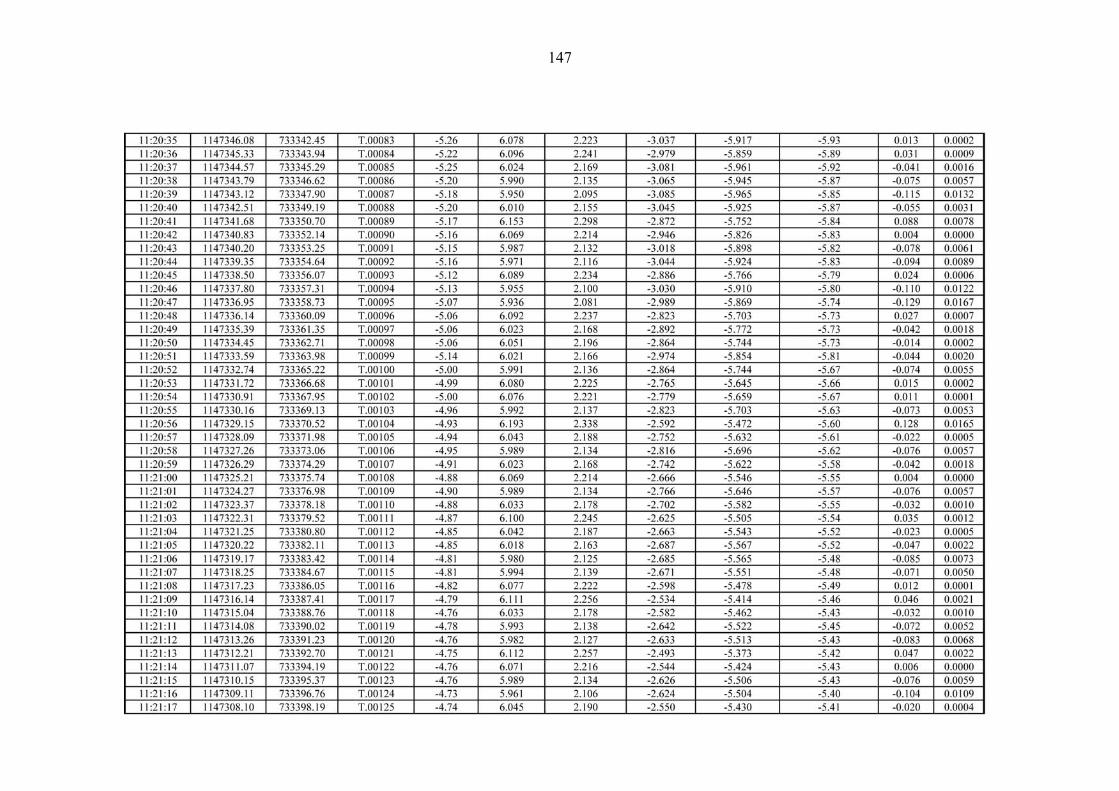
147
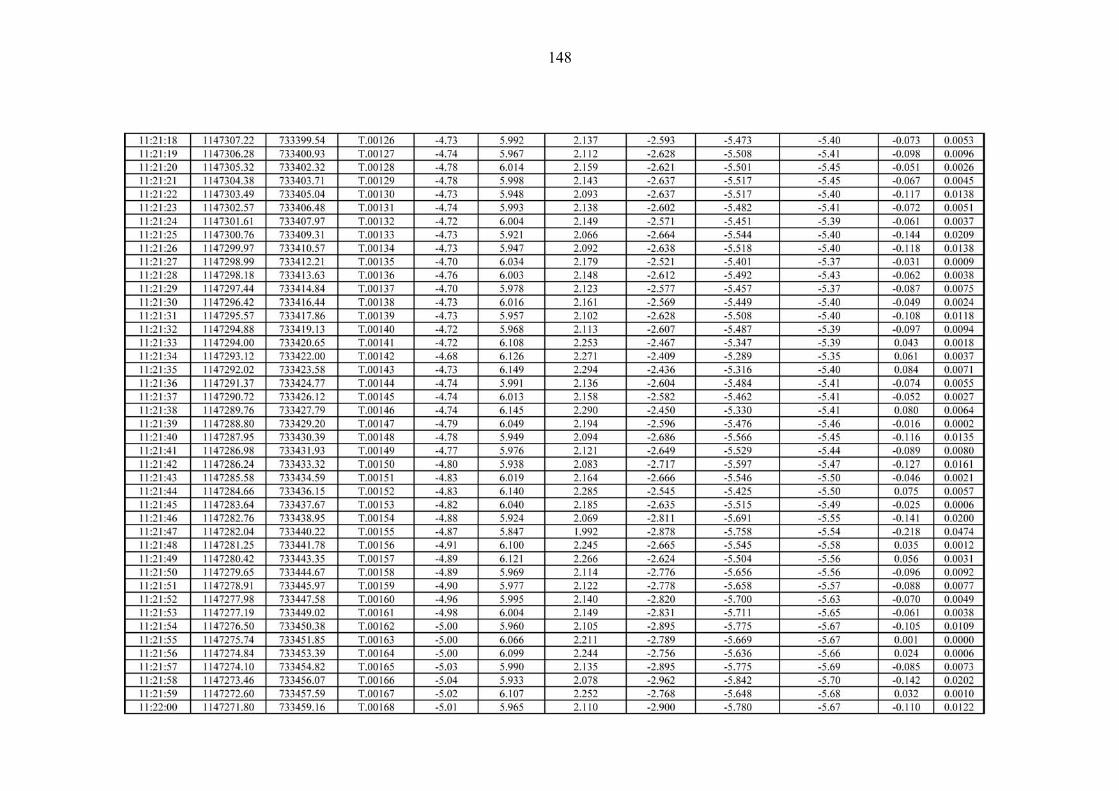
148
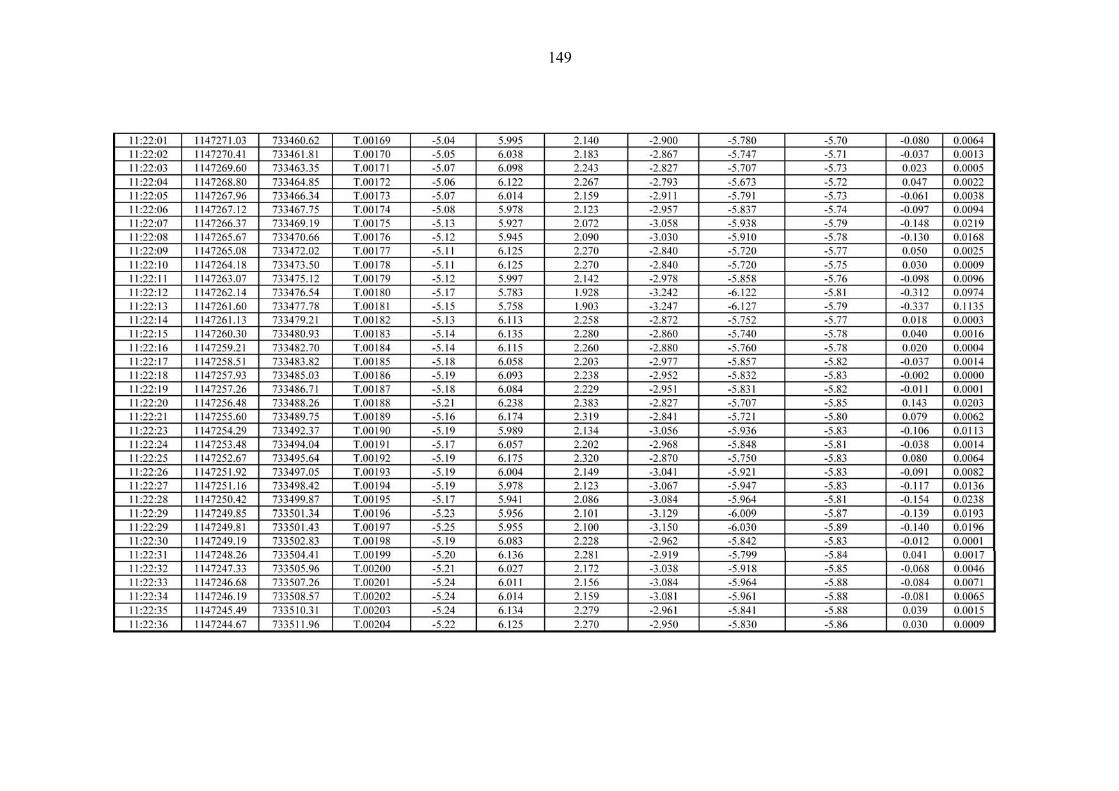
149
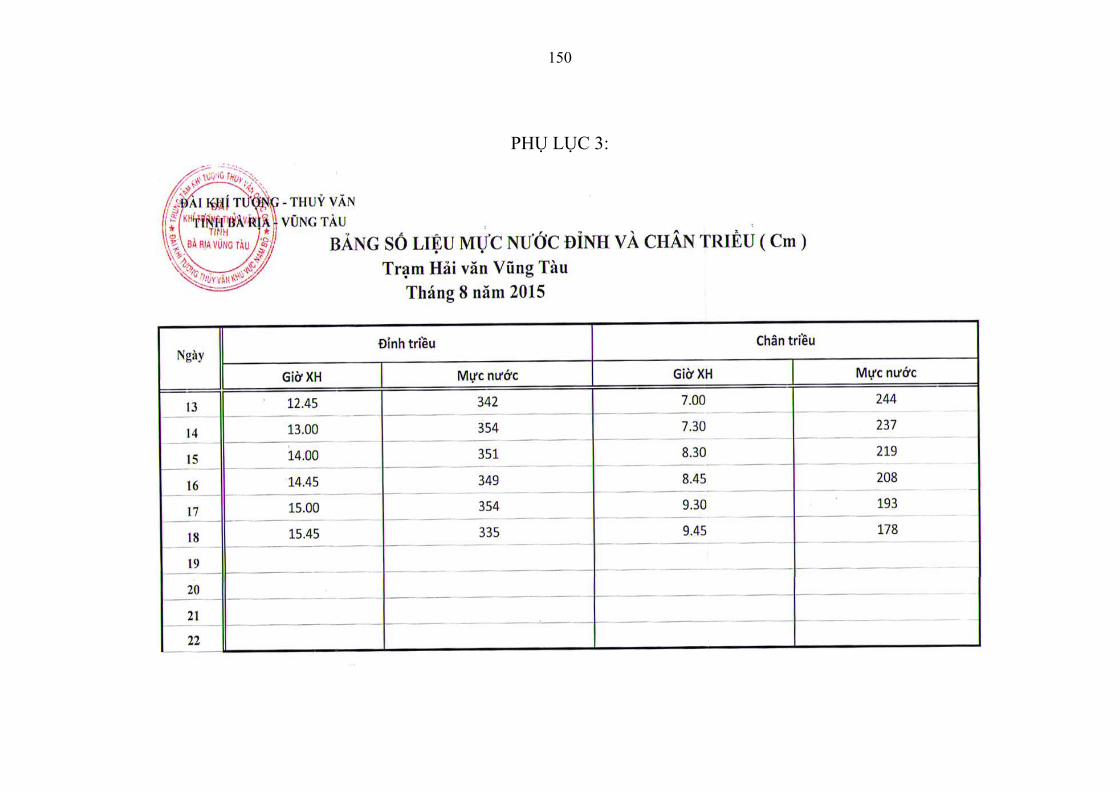
150
PHỤ LỤC 3:
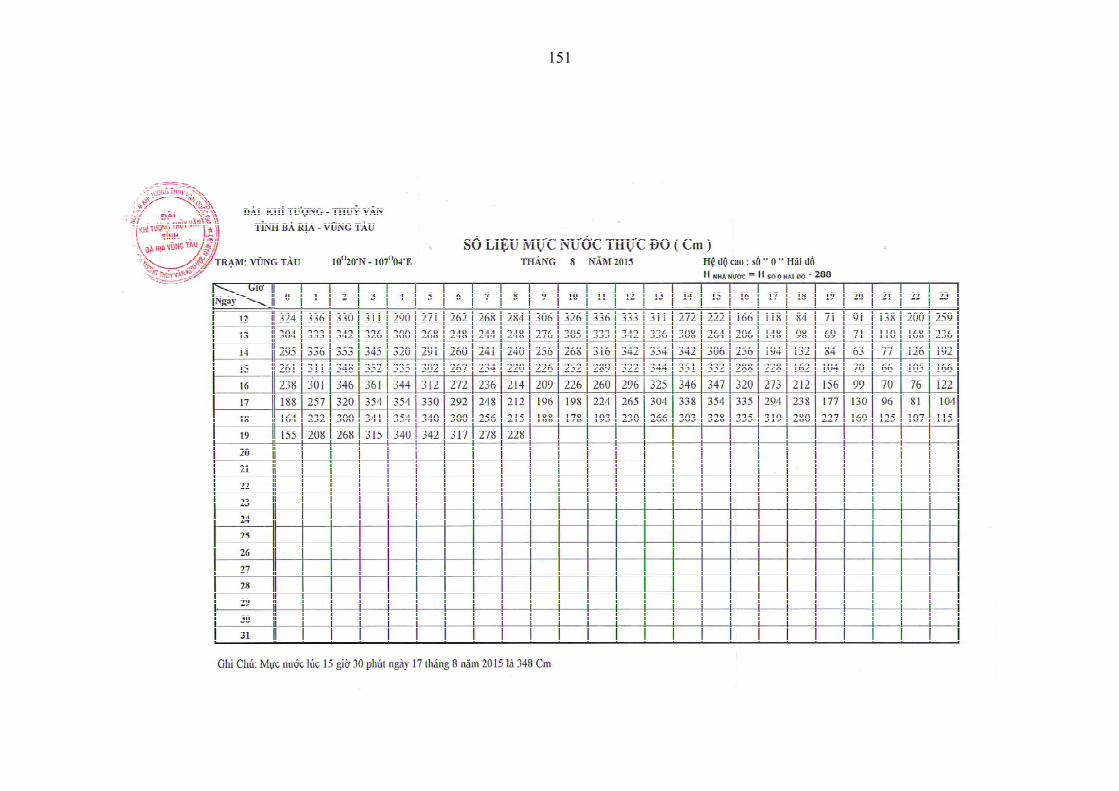
151
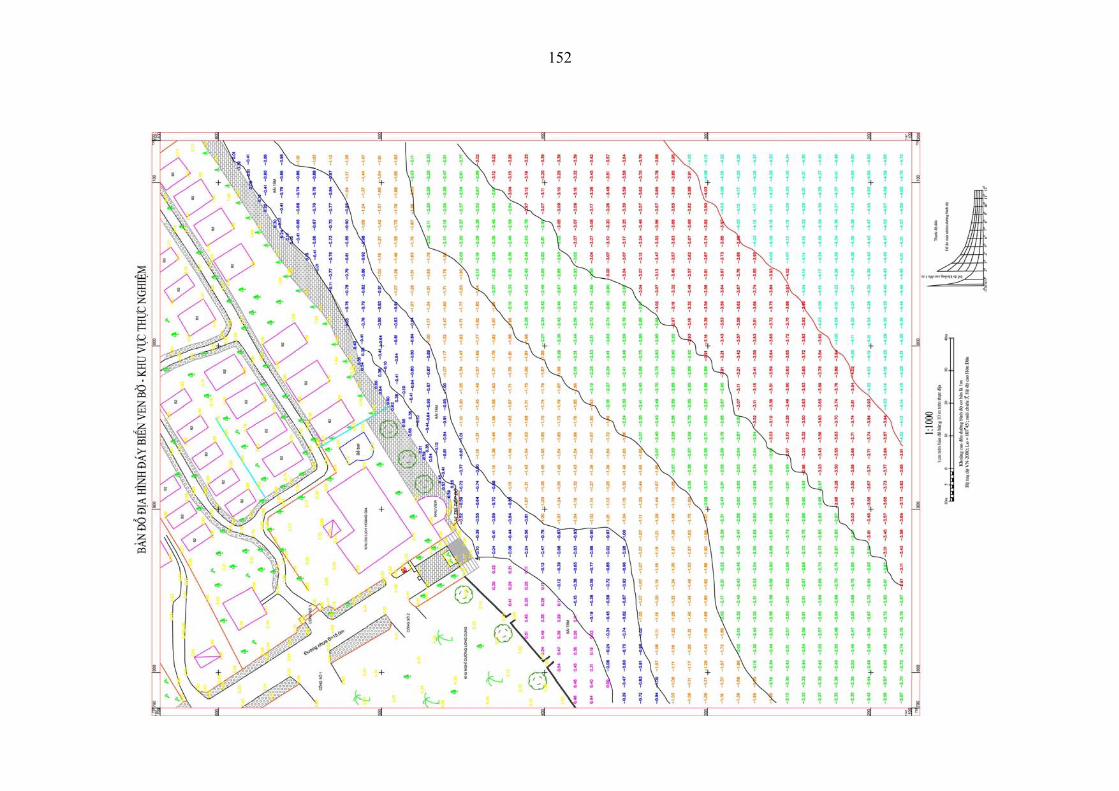
152





























