Embed Size (px)
Citation preview

5
BAB II
LANDASAN TEORI
2.1. Computer Aided Detection (CADe) and Diagnosis
(CADx) Mammogram
Sejak 1998, teknologi CADe telah disetujui oleh FDA (Food and Drug
Administration) untuk digunakan dalam mammography screening (Fenton et al,
2007). Computer Aided Detection (CADe) digunakan oleh radiolog untuk mencari
dan menandai wilayah yang mengandung lesi abnormal (Mohamed & Kadah,
2007). Untuk menghasilkan diagnosa yang efektif, dibutuhkan workstation
solution yang dapat “berkomunikasi” dengan citra mammogram. Perangkat yang
dapat membantu radiolog dalam melakukan pengamatan antara lain (Karellas,
Vedantham, & Lewin, 2009):
1. Tools untuk menampilkan / menyembunyikan hasil deteksi CAD secara
interaktif
2. Tools untuk memperbesar citra dari ukuran aslinya.
3. Fungsi-fungsi yang dapat diatur untuk menyesuaikan radiolog dalam
mengamati.
Selanjutnya, wilayah yang dicurigai pada CADe akan didiagnosa oleh
Computer Aided Diagnosis. Computer Aided Diagnosis merupakan diagnosa
seorang radiolog yang menggunakan hasil analisa komputer pada gambar medical
sebagai “second opinion”, dalam mengkaji penyakit lebih dalam, dan membuat
keputusan diagnosa (Giger, Karssemeijer, & Armato, 2002). Pada mammogram,
CADx berfungsi untuk menentukan wilayah yang dicurigai atau ROI (Region of

6
Interest) kedalam kategori benign (tidak berbahaya bagi kesehatan) atau
malignant (berbahaya). Hasil diagnosa ini akan membantu radiolog dalam
menentukan langkah selanjutnya, apakah diperlukan biopsy atau follow-up
mammography jangka pendek. (Elfarra & Abuhaiba, 2012).
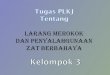
CADe secara garis besar terdiri dari 2 tahap. Pada tahap pertama, CADe
bertujuan untuk mendeteksi lesi yang berbahaya dengan nilai sensitivity yang
tinggi. Pada tahap kedua, CADe bertujuan untuk mengurangi false positive tanpa
mengurangi sensitivity secara drastis. Sedangkan CADx secara garis besar
mempunyai 1 tahap yang terdiri dari 5 langkah yaitu, pengolahan citra,
segmentasi, ekstrasi fitur, pemilihan fitur dan klasifikasi. Proses CADx diawali
dengan menginput bagian lesi yang abnormal (ROI) dan diakhiri dengan output
berupa kecenderungan malignant atau saran untuk penanganan lebih lanjut.
Gambar 2. 1. Tahap-tahap dalam CADe dan CADx (Bovik, 2005)

7
2.2. Pengolahan Citra
Pengolahan citra adalah sebuah istilah untuk operasi awal yang dilakukan
pada citra. Pengolahan citra bertujuan agar meningkatkan data pada citra yang
terdistorsi. Pengolahan citra tidak meningkatkan informasi pada gambar. Banyak
citra digital terkadang buram atau blur karena noise sehingga gambar tersebut
perlu diolah agar noise hilang dan citra menjadi lebih tajam. (Roopashree.S,
Saini, & Singh, 2012).
Dalam mammogram, pengolahan citra sangat dibutuhkan dalam
menentukan orientasi pada mammogram, menghilangkan noise dan meningkatkan
kualitas citra (Bandyopadhyay, 2010). Sebelum citra diproses, tahap pengolahan
citra sangatlah penting untuk mempersingkat pencarian lesi abnormal tanpa
terpengaruh background mammogram. Salah satu operasi dalam pengolahan citra
yang sering dilakukan adalah cropping. Dengan cropping, bagian yang tidak
relevan pada gambar seperti background dapat dihilangkan sehingga dapat fokus
terhadap wilayah yang relevan (Miljkovi`c, 2009).
2.2.1. Contrast Enhancement
Contrast Enhancement adalah salah satu jenis operasi dalam pengolahan
citra. Pada citra mammogram, contrast enhancement adalah proses memanipulasi
citra mammogram untuk meningkatkan kekontrasan gambar tersebut dan dapat
mengurangi noise pada saat mendeteksi bagian lesi yang abnormal (Biltawi, Al-
Najdawi, & Tedmori, 2012). Tujuan dari contrast enhancement ini ialah untuk
menghilangkan pixel-pixel gelap yang terdapat pada daerah abnormal (Mencattini,

8
Rabottino, Salmeri, Lojacono, & Colini, 2008). Nilai kontras yang terdapat pada
daerah ROI dapat ditingkatkan dengan menggunakan persamaan:
(2. 1)
di mana k = 2,3,4,… dan merupakan nilai intensitas pixel pada citra
asli , merupakan hasil peningkatan masing-masing citra. Sedangkan
merupakan intensitas maksimum dari citra asli.
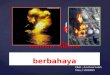
Gambar 2. 2. Gambar Sebelum dan Sesudah Dilakukan Contrast Enhancement
(MathWorks, 2015)
2.2.2. Histogram Equalization
Histogram equalization merupakan salah satu teknik peningkatan kontras
citra yang sering digunakan pada gambar terang atau gelap dalam domain spasial
(Patel, Maravi, & Sharma, 2013). Dengan histogram equalization, kontras gambar
akan meningkat secara menyeluruh (global). Kontras gambar dimodifikasi dengan
dengan cara melebarkan puncak dan memampatkan palung histogram (Sasi &

9
Jayasree, 2013) . Proses ini dilakukan dengan menggunakan cummulative density
function menggunakan persamaan berikut:
(2. 2)
dimana N adalah jumlah pixel citra dengan L level intensitas dan
adalah jumlah pixel pada intensitas level .
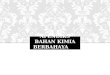
Gambar 2. 3. Gambar Original dan Gambar Hasil Histogram Equalization
(Fishbaugh, 2015)
2.2.3. Contrast Limited Adaptize Histogram Equalization
Teknik Contrast Limited Adaptize Histogram Equalization (CLAHE)
merupakan teknik peningkatan kontras yang sering digunakan pada medical
images (Reza, 2004). CLAHE merupakan peningkatan dari histogram
equalization karena dapat beradaptasi dengan kontras lokal. Puncak histogram
(peaks) pada citra bisa saja merupakan area yang tidak diinginkan, sehingga
histogram equalization dapat keliru dan menyebabkan wilayah yang tidak
diingikan meluas (noise).

10
Dalam Contrast Limited Adaptize Histogram Equalization (CLAHE), citra
dipotong menjadi beberapa citra kecil dan kemudian dilakukan equalization pada
setiap potongan citra (Min, Lim, Kim, & Lee, 2013). Blocking artifacts antar
potongan citra dihilangkan dengan cara dilakukan bilinear interpolation. Dengan
CLAHE, kontras pada wilayah yang homogen dapat dibatasi sehingga noise
amplification dapat dihindarkan.
Gambar 2. 4. Gambar Original dan Gambar Hasil CLAHE (MathWorks, 2015)
2.2.4. Modified Seed Region Growing
Seed Region Growth adalah sebuah proses dimana sebuah pixel atau
kumpulan pixel berkembang menjadi wilayah yang lebih besar dengan
menentukan kriteria diawal. Metode dasar dari SRG dimulai dari kumpulan seed
yang ditaruh, kemudian pixel-pixel tetangga disekitar nya yang memiliki
kemiripan karakteristik dengan seed akan membuat satu wilayah. Untuk
pemilihan karakteristik seed, bergantung pada fitur dari masalah yang ingin
diselesaikan. Apabila tidak ada pixel lagi yang memiliki karakteristik mirip
dengan seed, maka wilayah yang berkembang akan berhenti (Shengjun, Houjin, &
Jupeng, 2011).

11
Gambar 2. 5. Region Sebelum dan Sesudah Seed Growthing (Marshall, 2015)
Pada umumnya, seed akan berkembang jika selisih antara mean dari
wilayah seed dengan pixel atas, kiri, kanan, atau bawah masih lebih besar dari
batas T yang ditentukan. Namun pada modified seed region growing, seed juga
akan berkembang jika intensitas pixel disekitar wilayah masih lebih besar dari P
dimana P merupakan intensity threshold.
2.2.5. Divide and Conquer Homogeneity Enhancement
Algorithm
DHCEA merupakan sebuah algoritma enhancement citra dengan melihat
kesamaaan pixel disekelilingnya pada digital mammogram (Maitra, Nag, &
Bandyopadhyay, Detection of Abnormal Masses using Divide and Conquer
Algorithm in Digital Mammogram, 2011). Pada metode ini akan ditentukan nilai
perbedaan threshold maksimum / maximum difference threshold (MDT) yang
didapatkan berdasarkan observasi. Algoritma ini melakukan scanning dari kiri ke
kanan serta atas ke bawah dari gambar mammogram. Jika pada saat scanning,
ditemukan pixel yang memiliki selisih lebih besar dari MDT, maka kumpulan
pixel akan dipecah menjadi 2 bagian berdasarkan pixel yang berbeda tersebut.
Pada kumpulan pertama pixel akan dihitung nilai modus dari himpunan tersebut.
Nilai intensitas modus ini akan disebarkan ke seluruh posisi setelah memodifikasi

12
nilai tersebut menggunakan teknik uniform color quantization pada ruang warna
yang dipecah menjadi skala 16 level. Proses ini akan berlangsung terus sampai
mencapai ujung kanan dari baris terakhir citra mammogram. Proses yang sama
juga akan dilakukan secara vertikal yang diikuti dengan uniform color
quantization.
Berikut algoritma untuk proses horizontal :
1. Scan citra dari pixel paling kiri ke paling kanan
2. Cek apakah nilai pixel,
MDT-nilai pixel < intensitas pixel < MDT + nilai pixel
3. Jika nilai tidak sesuai, kelompokkan kumpulan pixel dari awal sampai
akhir berdasarkan pixel yang berbeda pada langkah 2.
4. Dari kumpulan pixel yang mirip tersebut (dari pixel awal sampai pixel
berbeda ), cari nilai modus dari semua pixel yang memiliki intensitas yang
sama dan ubah semua pixel dari kumpulan tersebut setelah melakukan
uniform color quantization pada kumpulan pixel.
5. Lanjutkan ke langkah 2 sampai ke pixel paling kanan dari baris terakhir
citra.
Algoritma ini juga akan dilakukan untuk proses scanning secara vertical
dari pixel paling atas sampai pixel paling bawah.

13
Gambar 2. 6. Pixel dengan Intensitas Berbeda (Kiri), Pixel Setelah Scanning
Horizontal (Tengah), dan Pixel Setelah Scanning Vertical (Kanan) (Maitra, Nag,
& Bandyopadhyay, Detection of Abnormal Masses using Divide and Conquer
Algorithm in Digital Mammogram, 2011)
2.2.6. Edge Detection Algorithm
Algoritma ini digunakan untuk mendeteksi edge pada citra mammogram
setelah menjalan algoritma DCEHA. Proses pendeteksian edge ini dilakukan
dalam 3 tahap. Pertama-tama dilakukan proses scanning citra secara horizontal
dengan mengambil pixel pertama sebagai nilai threshold adaptif (Δt). Nilai ini
akan dibandingkan dengan pixel berikutnya sampai mencapai ujung kanan. Jika
terjadi perubahan intensitas pixel antara 2 pixel yang melebihi nilai threshold
adaptif maka algortima ini akan menandakan pixel terakhir sebagai edge dan
mengubah warna pixel tersebut menjadi hitam pada citra mammogram di tahap
akhir.
(2. 3)
Selanjutnya algoritma ini akan dilakukan juga untuk vertical scanning.
Teknik yang sama pada horizontal dilakukan juga pada vertical scanning dengan
menentukan pixel pertama sebagai nilai threshold adaptif. Jika terjadi perubahan
intensitas pixel antara 2 pixel yang melebihi nilai threshold adaptif maka

14
algoritma ini akan menandakan pixel terakhir sebagai edge dan mengubah warna
pixel tersebut menjadi hitam pada citra mammogram di tahap akhir.
(2. 4)
Setelah selesai melakukan horizontal dan vertical scanning maka akan
dilakukan operasi penggabungan antara pixel hasil horizontal scanning dan
vertical scanning untuk menghasil edge pada gambar mammogram.
Edge = ƒ(h) ∪ ƒ(v)
(2. 5)
(a) (b)
(c) (d)
Gambar 2. 7. Pixel setelah horizontal scanning (a), Pixel setelah vertical scanning
(b), Pixel setelah gabungan vertical dan horizontal (c), Tampilan Pixel akhir
dengan background putih (d) (Maitra, Nag, & Bandyopadhyay, Detection of
Abnormal Masses using Divide and Conquer Algorithm in Digital Mammogram,
2011)

15
2.2.7. Seeded Region Growing Algorithm
Algoritma ini merupakan algorithma lanjutan dari Edge Detection
Algorithm. Proses segmentasi yang dilakukan oleh Edge Detection Algorithm
menyebabkan terbentuknya beberapa region dimana pixel didalamnya memiliki
intensitas yang sama. Pada tahap ini, intensitas pixel pada sebuah region akan di
ubah dengan modus dari pixel-pixel pada region tersebut dengan menggunakan
intensitas citra awalnya (sebelum dilakukan DCHEA).
Algoritma ini diawali melakukan scanning secara horizontal dari kiri ke
kanan untuk mencari bagian yang belum diwarnai. Jika ditemukan region yang
belum diwarnai maka akan di taruh sebuah seed yang akan bertumbuh selama
belum mencapai edge dengan memanfaatkan stack. Setelah seed selesai
bertumbuh, dihitung modus dari wilayah tersebut namun memakai intensitas pixel
pada citra awal sebelum dilakukan DCHEA. Nilai modus ini kemudian digunakan
untuk mewarnai region tersebut. Jika sudah mencapai pojok kanan gambar, maka
posisi scanning akan turun secara sumbu y dan melakukan horizontal scanning
lagi diawal sampai mencapai ujung bawah kanan citra (Maitra, Nag, &
Bandyopadhyay, Detection of Abnormal Masses using Divide and Conquer
Algorithm in Digital Mammogram, 2011). Berikut ini langkah-langkah
melakukan SRGA:
1. Lakukan scan dari kiri citra pada baris pertama
2. Jika pixel belum di warnai dan bukan boundary edge, maka push seed
tersebut kedalam Seed Stack
3. Cek pixel pada atas, kiri, bawah dan kanan dari seed tersebut

16
4. Jika pixel belum di warnai dan bukan boundary edge, maka push seed seed
tersebut kedalam Seed Stack
5. Pop sebuah seed dari stack tersebut dan masukkan ke dalam Color List
yang nantinya akan diwarnai.
6. Ulangi selama seed stack belum kosong dan sampai tidak ada lagi terdapat
pixel yang belum diwarnai pada region tersebut, kemudian ulangi step 2
7. Setelah mendapatkan Color List, scan intensitas pada citra asli dan
hitunglah modus
8. Warnai region tersebut dengan modus pada tahap sebelumnya
9. Kosongkan Color List dan kembali ke tahap pertama sampai seluruh
wilayah diwarnai.
2.3. Robust Regression
Linear regression telah menjadi salah satu alat statistik terpenting untuk
menganalisa data. Akan tetapi, linear regression tidak dapat berfungsi dengan baik
ketika distribusi error tidak normal. Untuk mengatasi permasalah ini, munculah
robust regression, yang dapat membuat fitting criterion sehingga tidak rentan
terhadap data noise.
Metode paling umum yang digunakan untuk robust regression ialah M-
estimation (Fox & Weisberg, 2011). Asumsikan linear model
(2. 6)
untuk observasi ke i dari n observasi. Maka fitted modelnya ialah

17
(2. 7)
M-estimator akan meminimalisasi fungsi objektif
(2. 8)
dimana fungsi berisi kontribusi setiap residual kepada fungsi objektif. Fungsi
harus memiliki karakteristik berikut :
Selalu positif,
Bernilai 0 jika argument yang berikan juga 0,
Simetris,
Sebagai contoh, untuk estimasi least-square.
Asumsikan yang merupakan turunan dari . Turunan dari fungsi
objektif dengan koefisien b dan dengan partial derivatives 0 akan menghasilkan
sistem dengan k + 1 yang dapat mengestimasi persamaan terhadap koefisien-
koefisien:
(2. 9)
Jika fungsi bobot w(e) = (e)/e, dan wi = w(ei) maka estimasi equation
dapat dituliskan sebagai berikut
(2. 10)

18
Persamaan diatas merupakan problem weigted least-square, dengan tujuan
meminimalkan
Pada problem ini, bobot bergantung pada residual,
namun residual bergantung pada estimated koefisien dan estimated koefisien
bergantung pada bobot. Untuk mengatasinya dibutuhkan sebuah solusi iteratif (
yang dikenal iteratively reweighted least-squares) yang memiliki tahap-tahap
berikut:
1. Tentukan nilai awal b(0)
2. Setiap iterasi t, hitunglah residual
dan bobot
dari
iterasi sebelumnya.
3. Hitung weighted least squares yang baru
(2. 11)
dimana X adalah matriks model, dengan untuk baris ke i dan W
(t-1) =
diag
merupakan bobot dari matriks.
Ulangi tahap kedua dan ketiga sampai estimated koefisien menjadi
konvergen. Matriks kovarians asymptotic dari b didefinisikan sebagai berikut
(2. 12)
Dengan menggunakan untuk mengestimasi E( ) dan
untuk mengestimasi dapat menghasilkan estimated matriks
kovarians asymptotic, (namun tidak baik jika sampel terlalu sedikit).

19
Tabel 2. 1. Fungsi Objektif dan Fungsi Bobot untuk Least-squares, Huber, dan
Bisquare Estimator
Metode Fungsi Objektif Fungsi Bobot
Least-Squares
Huber
Bisquare
2.4. Shape Descriptor
Sebuah descriptor yang baik dapat menggambarkan karakteristik dari
sebuah shape. Shape descriptor yang paling umum digunakan ialah area,
circularity, eccentricity, major axis orientation dan bending energy (Yong,
Walker, & Bowie, 1974). Shape descriptor tersebut hanya bisa membedakan
shape yang memiliki perbedaan besar, oleh karena itu descriptor ini biasa
digunakan sebagai filter yang bertujuan menghilangkan false hits shape atau
dikombinasikan dengan descriptor lainnya agar dapat membedakan shape.
2.4.1. Eccentricity
Eccentricity merupakan pengukuran berdasarkan perbandingan/rasio
antara major dan minor axis dari suatu objek. Eccentricity ini biasa diukur dengan
menggunakan minimum bounding rectangular box.

20
Gambar 2. 8. Minimum Bounding Rectangular Box (Park, 2011)
Setelah terbentuk minimum bounding rectangular box, akan didapatkan L
dan W sebagai panjang dan lebar kotak tersebut yang digunakan untuk
menghitung dengan persamaan berikut :
Eccentricity = L / W (2. 13)
2.4.2. Circularity
Circularity merupakan indikator seberapa mirip objek dengan lingkaran (Park,
2011). Objek dengan bentuk yang sangat rumit akan memiliki nilai circularity yang kecil.
Circularity ini diukur dengan menggunakan persamaan berikut :
Circularity = perimeter2 / 4 * Pi * Area
(2. 14)
2.4.3. Solidity
Solidity merupakan indikator kepadatan dari sebuah objek (Sarfraz &
Ridha, 2007). Solidity diukur berdasarkan pebandingan/rasio antara luas objek
dengan convex hull area dari objek tersebut yang didefinisikan sebagai persamaan
berikut:
Solidity = Areashape / Areaconvex hull
(2. 15)

21
2.5. Ekstrasi Fitur
Ekstraksi fitur mendeskripsikan informasi relevan yang terkandung dalam
sebuah pola sehingga pekerjaan klasifikasi akan menjadi lebih mudah. Dalam
pengenalan pola dan pengolahan citra, ekstraksi fitur merupakan sebuah bentuk
special dari reduksi dimensi. Tujuan utama dari fitur ekstraksi adalah
mendapatkan informasi yang paling relevan dari data asli dan menampilkan
informasi tersebut didalam dimensi yang lebih rendah. Ketika sebuah data yang
dimasukkan kedalam algoritma terlalu besar untuk diproses maka data tersebut
akan direduksi agar menghasilkan vektor fitur. Proses mengubah data input
menjadi vektor fitur ini disebut proses ekstraksi fitur. Apabila proses ekstraksi
fitur dilakukan secara hati-hati, maka dapat diharapkan vektor fitur akan berisikan
informasi relevan dari data input sehingga pekerjaan yang menggunakan fitur ini
tidak perlu menggunakan input dengan ukuran yang besar (Kumar & Bhatia,
2014).
2.5.1. Gray Level Co-occurrence Matrix
Gray Level Co-occurrence Matrix adalah sebuah teknik untuk
mengevaluasi tekstur berdasarkan relasi spasial antar pixel pada citra. Metode ini
menghitung banyaknya pasangan pixel dalam berbagai intensitas, yang saling
berelasi spasial. Relasi spasial ini berarti relasi antara sebuah pixel dengan
intensitas tertentu terhadap pixel lain pada jarak ( 1, 2 ..) dan sudut (0, 45, 90 ,
135) tertentu. Kumpulan relasi spasial akan membentuk sebuah matriks yang
disebut matriks kookurensi pada skala keabuan (gray level co-ocurence matrix).

22
Setelah mendapatkan matriks kookurensi, maka dapat dilakukan ekstraksi
fitur dengan melakukan perhitungan statistik. Haralik menunjukan bahwa terdapat
14 fitur tekstur yang didefinisikan dalam persamaan dibawah ini (Haralick,
Shanmugam, & Dinstein).
Notasi:
adalah nilai ke (i,j) pada matriks kookurensi
adalah jumlah dari elemen matriks pada baris ke i
adalah jumlah dari elemen matriks pada kolom ke j
Ng adalah tingkat kuantisasi keabuan pada citra
k = 2,3,…,2Ng
(2.
16)
k = 0,1,…, Ng – 1. (2.
17)
Fitur Tekstur:
1. Angular Second Moment
f1 = (2.
18)
2. Contrast
f2 =
(2.
19)
3. Correlation

23
f3 =
(2. 20)
dimana dan adalah rata-rata dan standar deviasi dari px dan py.
4. Sum of Squares: Variances
f4 = (2. 21)
5. Inverse Difference Moment
f5 =
(2. 22)
6. Sum Average
f6 =
(2. 23)
7. Sum Variance
f7 =
(2. 24)
8. Sum Entropy
f8 =
(2. 25)
9. Entropy
f9 = (2. 26)
10. Difference Variance
f10 = (2. 27)
11. Different Entropy
f11 =
(2. 28)

24
12. & 13. Information Measures of Correlation
f12 =
(2. 29)
f13 =
(2. 30)
(2. 31)
dimana HX dan HY adalah entropy dari px dan py, dan
(2. 32)
(2. 33)
2.6. Retrieval Citra Berbasis Konten
Retrieval Citra Berbasis Konten (Content Image Based Retrieval)
memanfaatkan konten dari gambar untuk merepresentasikan dan melakukan
indexing data (Wei & C.T. Li, Design of content-based multimedia retrieval,
2005).

25
Gambar 2. 9. Kerangka Konseptual untuk CBIR (Wei & C.T. Li, Design of
content-based multimedia retrieval, 2005)
Sistem pencarian berbasis konten pada umumnya di bagi menjadi dua
tahap, yakni tahap offline dan tahap online. Dalam tahap offline, dilakukan proses
ekstraksi vektor fitur multi-dimensional, yang juga dikenal dengan descriptor.
Vektor fitur ini merupakan sebuah dataset fitur yang disimpan di dalam database.
Pada tahap online, user akan mengirimkan contoh query ke sistem pencarian
gambar untuk mendapatkan gambar yang diinginkan. Distance atau similaritas
yang dihasilkan antara fitur vektor pada contoh query dan fitur vektor yang
terdapat dalam database akan digunakan untuk diurutkan. Proses retrieval
dilakukan dengan menerapkan skema indexing untuk menyediakan sebuah cara
yang efisien dalam melakukan pencarian dalam database citra. Setelah itu, sistem
akan mengurutkan hasil pencarian yang paling sesuai dengan contoh query yang
dikirimkan. Jika hasil tidak sesuai harapan, maka user dapat memberikan

26
feedback kepada sistem pencarian konten (Wei & C.T. Li, Design of content-
based multimedia retrieval, 2005).
2.7. Kd-Tree Indexing
Kd-tree merupakan struktur data yang umum digunakan untuk mengatur
titik-titik pada ruang multidimensional yang memiliki k dimensi (Otair, 2013).
Proses searching pada K-d tree bersifat binary dengan limitasi didalamnya. Kd-
tree sangat membantu untuk melakukan pencarian seperti nearest neighbor dan
range.
Pada K-D Tree, setiap node level akan menyimpan data dari dimensi
pertama, kemudian node anaknya akan menyimpan data dari dimensi kedua, dan
berulang seterusnya sampai k dimensi. Titik yang akan dimasukkan dipilih
berdasarkan median dari titik-titik yang akan dimasukkan kedalam subtree. Proses
ini akan berhenti ketika sebuah node mencapai nilai maximum jumlah titik yang
telah ditentukan.
Gambar 2. 10. Ilustrasi Kd Tree

27
Pada saat melakukan pencarian titik sebanyak k terdekat dari query, kd-
tree melakukan proses sebagai berikut (dengan ilustrasi Gambar 2. 9. ) :
1. Mencari lokasi node yang tepat untuk query. ( Node ke 4 )
2. Mencari k titik terdekat yang terletak didalam node sebelumnya pada proses
pertama
3. Mencari nodes lain yang memiliki jarak yang sama dengan k points terdekat
pada proses kedua. (Node ke 3)
4. Dari semua nodes, cari k titik terdekat dengan query.
2.8. Neural Network
Neural Network digunakan untuk men-generate kecenderungan peta untuk
setiap mammogram dengan menggunakan fitur-fitur pada gabor sebagai input dari
classifier. Nilai yang terdapat kecenderungan peta menunjukkan kemungkinan
pixel tersebut untuk diklasifikasi sebagai pixel macrocalcification dimana
semakin tinggi nilai pixel, maka kecenderungan pixel tersebut untuk diklasifikasi
sebagai pixel macrocalcification semakin besar (Dheeba.J & Jiji.G, 2010).
Model yang terdapat pada multilayer perceptron (MLP) terdiri dari sebuah
atau lebih hidden layer dan fungsi node-node yang terdapat pada hidden layer
adalah sebagai penengah antara input dan output pada neural network. Pertama,
sebuah vektor input dimasukkan ke dalam layer input pada neural network.
Selanjutnya, node yang terdapat pada layer input memberikan sinyal kepada node
yang terdapat pada hidden layer. Sinyal output yang diberikan oleh hidden layer
dapat dijadikan inputan bagi hidden layer selanjutnya atau output layer. Apabila
terdapat error pada output, akan sangat sulit untuk menentukan berapa banyak

28
error yang ada dalam layer input, hidden, maupun output serta bagaimana cara
menyesuaikan bobot untuk menghasilkan output yang sesuai (Sid-Ahmed, 1995).
Permasalahan ini dapat diselesaikan dengan mencari efek dari keseluruhan bobot
dengan menggunakan algoritma backpropagation (Alginahi, 2004) yang
merupakan generalisasi dari algoritma Least Mean Square (LMS). Nilai dari
Mean Square Error (MSE) dapat dilihat pada persamaan berikut:
(2. 34)
di mana m merupakan jumlah data pada training set, k merupakan jumlah
output, Tij merupakan nilai target output dari output ke-i untuk data training ke-j,
dan Oij merupakan nilai output yang sebenarnya pada output ke-i untuk data
training ke-j (Islam, Ahmadi, & Sid-Ahmed, 2010).
2.8.1. Radial Basis Function Neural Network
Secara umum, Radial basis function neural nework (RBF NNs) memiliki 3
layer yaitu input layer, hidden layer dan output layer (Yoo, Oh, & Pedrycz,
2015).
Gambar 2. 11. Arsitektur RBF Neural Network (Mathworks, 2016)

29
RBF Neural Network hanya memiliki satu hidden layer dan satu output
linear layer. Setiap node pada hidden layer menentukan level aktivasi bagian
reseptif (radial basis function) (x) yang diberikan input x. Output yj(x)
merupakan kombinasi linear dengan bobot dari beberapa level aktivasi bagian
reseptif dengan persamaan berikut
yj (x) =
(2. 35)
dengan j = 1 , … , s dimana s berarti jumlah output ( sebanyak class yang
ingin diklasifikasikan pada RBF NN). Pada level aktivasi akan digunakan
Gaussian dengan persamaan berikut
(2. 36)
dimana x adalah input vector dengan dimensi n [x1, …, xn]T, dan vi = [vi1,
…, vin] merupakan pusat ke i dari fungsi basis sementara c merupakan
jumlah node pada pada hidden layer. Distance yang digunakan pada persamaan
2.26 merupakan ecludian distance (Staiano, Tagliaferri, & Pedrycz, 2006).
2.9. Studi yang relevan
Penelitian mengenai pendeteksian kanker payudara pada citra
mammogram telah dilakukan sebelumnya. Pada tahun 2008, Hanmandu, M et al
mengusulkan sebuah computer aided detection untuk mendeteksi mass dan
microcalcification menggunakan MIAS dataset dengan algoritma yang terpisah.
Pertama-tama Hanmandu melakukan segmentasi microcalcification dengan
menggunakan filtering Laplacian of Gaussian (LoG) dan kemudian disegmentasi

30
menggunakan kontras lokal thresholding. Pada bagian mass, akan dilakukan
segmentasi menggunakan enthropy thresholding. Penelitian ini dapat
menghasilkan segmentasi yang baik namun tidak disertakan akurasi dari
penelitian. (Hanmandlu, Vineel, Madasu, & Vasikarla, 2008)
Pada tahun 2011, Indra Kanta Maitra et al mengusulkan metode baru
untuk melakukan segmentasi mass menggunakan Binary Homogeneity
Enhancement Algorithm (BHEA). Metode ini sudah terautomisasi sehingga tidak
membutuhkan parameter. Penelitian ini dilakukan menggunakan MIAS dataset
dan mendapatkan akurasi 99.87% dengan sensitivity 94.21% dan specificity
92.99%. (Maitra, Nag, & Bandyopadhyay, AUTOMATED DIGITAL
MAMMOGRAM SEGMENTATION FOR DETECTION OF ABNORMAL
MASSES USING BINARY HOMOGENEITY ENHANCEMENT
ALGORITHM, 2011)
Pada tahun 2011, Indra Kanta Maitra et al mengusulkan metode baru
untuk melakukan segmentasi mass menggunakan Divide and Conquer
Homogeneity Enhancement Algorithm (DCHEA). Metode ini sudah terautomisasi
sehingga tidak membutuhkan parameter. Penelitian ini dilakukan menggunakan
MIAS dataset dan mendapatkan akurasi 99.90% dengan sensitivity 96.06% dan
specificity 95.21%. (Maitra, Nag, & Bandyopadhyay, Detection of Abnormal
Masses using Divide and Conquer Algorithm in Digital Mammogram, 2011)
Pada tahun 2011, Zhang et al mengusulkan metode baru untuk melakukan
segmentasi microcalcification menggunakan multi-resolution region growth dan
segmentasi berdasarkan image difference. Metode ini menggunakan MIAS dataset

31
dan menghasilkan akurasi 94.78% dengan false positive 1.93. (Shengjun, Houjin,
& Jupeng, 2011).
Adapun beberapa penelitian lain yang telah dilakukan dapat dilihat pada
Tabel 2.2.
Tabel 2. 2. Perbandingan Beberapa Penelitian terhadap Digital Mammogram
Publikasi Masalah Metode
Deteksi
Metode
Diagnosis
Metode
CBIR
(Luwinda &
Santika,
2012)
Ekstraksi fitur
menggunakan
NMF, LNMF dan
nsNMF pada
Klasifikasi
Mammogram)
- NMF, LNMF
dan nsNMF
dengan
Classifier
Neural
Network
-
(David &
Santika,
2012)
Computer Aided
Diagnosis System
untuk Digital
Mammogram
- Dual Tree
Complex
Wavelet
Transform (DT
CWT) dengan
Classifier
Neural
Network (NN)
-
(Sanjaya,
Putra, &
Santika,
2012)
Sistem Klasifikasi
Mammogram
- Law’s Texture
En
ergy Measures
(LTEM)
dengan
Classifier KNN
(K Nearest
Neighbour)
-
(Kosasi,
Setiawan,
Sudarsan, &
Santika,
2012)
Diagnosis Kanker
Payudara
berdasarkan
Microcalcification
- Gray Level Co-
Occurrence
Matrix
(GLCM)
dengan
Classifier
Support Vector
Machine
(SVM)
-

32
(Angries &
Santika,
2012)
Klasifikasi Kanker
Payudara pada
Mammogram
- GLCM, GL
RLM, dan Chip
Histogram
dengan
Classifer Naïve
Bayes
-
(Diana &
Santika,
2012)
Sistem
pengambilan Citra
Mammogram
- - NMF dan
DT CWT
(Pratiwi,
Alexander,
Harefa, &
Nanda, 2015)
Komparasi
Classifier BPNN
dan RBFNN pada
Mammogram
- GLCM dengan
Classifier
BPNN dan
RBFNN
-
(Alexander
& Santika,
2016)
Sistem CADD
untuk Deteksi,
Diagnosa dan
Similarity Search
Seed
Growing,
Robust
Regression
dan Shape
Descriptor
GLCM
dengan
Classifier
RBFNN
GLCM
dengan
KD-Tree
Indexing
Jika dilihat dari perbandingan Tabel 2.2, penelitian sebelumnya hanya
menerapkan sistem diagnosis ataupun sistem CBIR pada gambar mammogram.
Tidak ada penelitian yang menggabungkan metode deteksi, diagnosis serta
similarity search. Mayoritas dari penelitian telah mampu mendeteksi kanker
payudara dengan akurasi yang cukup tinggi namun rata-rata penelitian hanya
berpusat pada satu jenis kanker yaitu mass atau microcalcification. Melihat dari
banyaknya penelitian yang hanya berpusat pada satu jenis kanker dan tidak
adanya penggabungan antara metode deteksi, diagnosis dan similarity search,
penelitian saat ini akan membangun sebuah sistem CADD yang dapat digunakan
untuk mendeteksi, men-diagnosis serta melakukan pencarian kanker sejenis baik
mass maupun microcalcification.