Embed Size (px)
Citation preview

Bayesian belief networks for guided remote diagnostics and troubleshooting
of heavy vehicles
MAHBUB HUSSAIN KAMALY
Master of Science Thesis
Stockholm, Sweden 2013

Bayesianska nätverk för guidad fjärrdiagnostik och åtgärdsplanering av
tunga fordon
MAHBUB HUSSAIN KAMALY
Examensarbete
Stockholm, Sverige 2013

Bayesianska nätverk för guidad fjärrdiagnostik och åtgärdsplanering av
tunga fordon
av
Mahbub Hussain Kamaly
Examensarbete MMK 2013:58 MDA 45
KTH Industriell teknik och management
Maskinkonstruktion
SE-100 44 STOCKHOLM

Bayesian belief networks for guided remote diagnostics and troubleshooting of heavy
vehicles
by
Mahbub Hussain Kamaly
Master of Science Thesis MMK 2013:58 MDA 45
KTH Industrial Engineering and Management
Machine Design
SE-100 44 STOCKHOLM



”Seek knowledge and learn (for science) peace and honour, and be humble to the person who
taught you.”
Prophet Muhammad (saw)

.
Examensarbete MMK 2013:58 MDA 45
Bayesianska natverk for guidad fjarrdiagnostik och
atgardsplanering av tunga fordon
Mahbub Hussain Kamaly
Godkant: Examinator: Handledare:
Jan Wikander Bengt Eriksson
Uppdragsgivare: Kontaktperson:
Scania CV AB Jonas Biteus.
Sammanfattning.
Kostnadreducering och effektivisering av reparationer (t.ex i bilindustrin) har varit malet for
forskningen kring guidad diagnostik i snart tvadecennier [1], med en onskan till intuitiv felsokn-
ing och reparation utan tidigare expert kunskaper. Detta betyder att automation vid diag-
nostik har blivit en nodvandighet dar det ar mojligt att forstakomplexa system samtidigt som
operatoren ges tillrackligt med stod och expertkunskaper fr att kunna tillfora kompetent assis-
tans. Detta examensarbete som utfordes paScania CV AB undersoker hur ett sadant system
skulle utformas och prestera samtidigt som arbetet ligger till grund for vidare utveckling av
guidad fjarrdiagnostik hos Scania.
Resultatet kommer att behandla tre analysomraden. Ett, dem observationer fran fordonet
som ar indikationer om ett felaktigt system. Tva, anvandning av ett Basianskt natverk for att
gora en diagnos pasystemet samt undersoka hurvida tillvagagangasattet ar effektivt eller inte
for den intiutiva kanslan. Tre, en studie och implementation av en effektiv felsokningsalgoritm
som minimerar reparationskostnaden baserad paden givna diagnosen, kostnad for reparation
av komponenter samt reparationstiden. Examensarbetet kommer forst att presenteras med en
djupgaende teoridel och foljs av implementation av teorin till en funktionell prototyp.

.
Master of Science Thesis MMK 2013:58 MDA 45
Bayesian belief networks for guided remote diagnostics and
troubleshooting of heavy vehicles
Mahbub Hussain Kamaly
Approved: Examiner: Supervisor:
Jan Wikander Bengt Eriksson
Commissioner: Contact person:
Scania CV AB Jonas Biteus.
Abstract.
Intuitive troubleshooting and fault repair without the need of prior expert knowledge of auto-
mobiles has become essential in an aim for cost-minimization and effectiveness of repairs, it
has been a focus in troubleshooting research for the past decade or two[1]. This calls for an
automated diagnosis system that is simple to understand and operate whilst at the same time
provides the operator with the expert knowledge required for competent assistance. This mas-
ter thesis conducted at Scania CV AB will investigate how such a system would function and
perform, providing a ground work for further development.
The result will incorporate three aspects of analysis. First, the observations from the vehi-
cle indicating that something is wrong or faulty. Second, the use of a Bayesian network, a
model structure that describes probabilistic relationships and dependencies among system vari-
ables, for diagnostic purposes and to examine its haul on intuitive understanding of the system
faults. Third, an implementation and study of a troubleshooting algorithm that will minimize
the cost of repair based on an easy calculated metric that takes into consideration the proba-
bility of fault, cost of observation and the cost of repair (and indirectly also the mean repair
time). Given a particular diagnosis, an optimized action plan and repair sequence is given. A
thorough review of the underlying theory will be provided for the reader in the first part of the
report, where a slight deviation will be made to further investigate the use of Bayesian filters
and its effect on the a priori probabilities used in the Bayesian model. In the final part the
reader will be guided through the implementation of the given theory and emersion of a working
prototype.

Acknowledgements
Jonas Biteus, for your extremely valuable contribution on the Bayesian model and for your
guidance and feedback.
Hakan Warnqvist, for your help and inputs.
Mattias Nyberg, for your refreshing inputs.
Anton Einarson, for the tremendous help and support in programming.
Bengt Eriksson, for your inputs.
iv

Contents
Declaration of Authorship i
Acknowledgements v
List of Figures xi
List of Tables xiii
Abbreviations xv
1 Introduction 1
1.1 Short introduction to DTC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 User requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.2 Research at Scania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Delimitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.1 Division of subsystems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Previous work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4.1 Products on the market . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Thesis outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Learning Models 9
2.1 Fuzzy logic and Dempster-Shafer evidence theory . . . . . . . . . . . . . . . . . . 9
2.2 A brief comparative analysis of learning models . . . . . . . . . . . . . . . . . . . 11
2.2.1 Neural networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1.1 A single element . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1.2 Architecture of neural networks . . . . . . . . . . . . . . . . . . 12
Feed-forward networks . . . . . . . . . . . . . . . . . . . . . . . . . 12
Feedback networks . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.2 Knowledge-based methods . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.3 Conclusion of analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Bayesian Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Bayesian probability theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.1 Joint probability distribution . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.2 Conditional independence . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
v

Contents
2.5.1 Inference in Bayesian networks . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5.1.1 Query-Based Inference . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Parameter learning via Kalman filters . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6.1 Problem statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6.2 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Previous research on Bayesian methods for diagnostics 27
3.1 Bayesian network for vehicle systems . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Bayesian network for diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4 Decision-Theoretic Troubleshooting 31
4.1 The troubleshooting process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2 The optimal decision tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 General assumptions of decision-theoretic troubleshooting . . . . . . . . . . . . . 34
4.3.1 Stochastic dynamical system . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.4 Troubleshooting strategies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5 Expected cost of repair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.5.1 Efficiency index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.5.2 The cost distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.6 Estimated cost of repair after tests . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5 Method 43
5.1 Requirements and research . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.2 Modelling and development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.3 Development framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.3.1 Google Web Toolkit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.4 Unit and integration testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.4.1 Equivalent partitioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.4.2 Comparison testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.4.3 Fuzz testing (or negative testing) . . . . . . . . . . . . . . . . . . . . . . . 48
6 Design and implementation 49
6.1 Bayesian network system modeling . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.1.1 Model assumptions and delimitations . . . . . . . . . . . . . . . . . . . . 49
6.1.2 Model component variables . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.1.3 Observation variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.1.4 A priori probabilities of components . . . . . . . . . . . . . . . . . . . . . 53
6.2 Cost of observation and repair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.2.1 Cost of observation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.2.2 Cost of repair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.2.3 ICL component costs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.3 Troubleshooting methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.3.1 Testing methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.3.2 Repair methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.4 The final Bayesian network model . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.5 Troubleshooting algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
vi

Contents
7 Results and verification 61
7.1 System integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7.2 Verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7.2.1 Equivalent partitioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.2.2 Comparison testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.2.3 Fuzz testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8 Conclusion 67
8.1 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
8.1.1 Bayesian models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
8.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
8.2.1 Linking to previous research . . . . . . . . . . . . . . . . . . . . . . . . . . 69
A Bayesian network model of the ICL 71
Bibliography 73
vii


List of Figures
1.1 The user scenario of remote diagnostics . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 The overall architecture of the DiaGuide project. . . . . . . . . . . . . . . . . . . 5
1.3 The three subsystems of guided remote diagnostics. . . . . . . . . . . . . . . . . . 6
1.4 An off-board diagnostic solution by Volvo - Remote Diagnostics [2] . . . . . . . . 7
2.1 A Threshold Logic Unit (TLU) [3] . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 A combined feedforward and layered network [4] . . . . . . . . . . . . . . . . . . 13
2.3 A feedback network [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 A directed acylic graph (DAG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.5 Given its parents (A), a node (B) is conditionally independent of its non-descendants(E). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 The Bayesian-network structure, consisting of an interdependent set of issues [5] 22
2.7 The ongoing discrete Kalman filter cycle. [6] . . . . . . . . . . . . . . . . . . . . 24
3.1 Bayesian network structure for vehicle stability control system [7] . . . . . . . . . 28
4.1 A decision tree representing all the possible solutions for troubleshooting a devicewith two components [8] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.1 The overall process in the V-model [9] . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2 The workflow from Java source code to a JavaScript web application via GWT. . 46
5.3 General Classification of Test Techniques . . . . . . . . . . . . . . . . . . . . . . 47
6.1 The Bayesian network model of the ICL . . . . . . . . . . . . . . . . . . . . . . . 58
6.2 One step horizon troubleshooting flowchart . . . . . . . . . . . . . . . . . . . . . 59
7.1 The graphical user interface (GUI) of the diagnostics demonstrator . . . . . . . . 62
7.2 The diagnosis, given fault code (DTC) 0234. The less likely components areunordered and as given and expected in Table 7.1, the Red CAN bus is indicatingto be faulty. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
A.1 The Bayesian network model of the ICL . . . . . . . . . . . . . . . . . . . . . . . 72
ix


List of Tables
1.1 A summary of DTC specifications . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 A simple coin toss test to determine the true probability . . . . . . . . . . . . . . 18
2.2 The joint probability table for Figure 2.4 . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 An example of different TS-sequences . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Cost of observation, repair and probability of fault for all components . . . . . . 39
4.3 Estimated cost of repair for different TS-strategies . . . . . . . . . . . . . . . . . 39
4.4 Efficiency index for all three components . . . . . . . . . . . . . . . . . . . . . . . 40
6.1 The different type of nodes defined in the network . . . . . . . . . . . . . . . . . 50
6.2 The component variables in the network . . . . . . . . . . . . . . . . . . . . . . . 51
6.3 The observation nodes in the network . . . . . . . . . . . . . . . . . . . . . . . . 52
6.4 The a priori probabilities for the components . . . . . . . . . . . . . . . . . . . . 53
6.5 The observation and repair cost for the components in the Bayesian model . . . . 55
6.6 The tests for the instrumental cluster . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.7 The repair methods for the instrumental cluster . . . . . . . . . . . . . . . . . . . 57
7.1 Input conditions for equivalent partitioning with one valid and two invalid out-puts. The test case was conducted on the integrated system. . . . . . . . . . . . 63
7.2 A comparison between Assistans+ and GeNIe outputs for a given set of inputs. . 63
xi


Abbreviations
BN Bayesian Network
JPD Joint Probability Distribution
GM Graphical Model
DAG Directed Acylic Graph
ICL Instrument Cluster
EMS Engine Management System
ECU Electronic Control Unit
DTC Diagnostic Trouble Code
ANN Artificail Neural Networks
ECR Estimated Cost of Repair
ECRT Estimated Cost of Repair after Tests
TS Troubleshooting Strategy
SDK Software Development Kit
GWT Google Web Toolkit
IDE Integrated Development Environment
API Application Programming Interface
AJAX Asynchronous JavaScript and XML
XML Extensible Markup Language
OEM Original Equipment Manufacturer
xiii


Dedicated to my parents Anwar & Fathema H. Kamalywithout whose love, support and perseverance I would not be where I am
today
xv


Chapter 1
Introduction
”If anything can go wrong, it will” - Edward A. Murphy
As the system complexity and interdependencies keeps on increasing and intensifying in trucks
in a rapid velocity, the requirements on troubleshooting and maintenance are getting more time-
critical. The complexity of the system is given from the various and complicated relationships
among components and subsystems. There is a need to find, exploit and repair a fault on a
truck as quickly as possible to minimize the vehicle downtime and hence reduce the cost of
troubleshooting and repair. Today, the time from fault detection to completed repair depends
very much on the skill and experience of the mechanic, his/her ability to diagnose the fault
correctly and find an appropriate action.
Hence, it’s crucial to find methods were the process of diagnosis and troubleshooting is done
more effectively to acquire minimal lead time. One way is to introduce automation of processes
or sub-processes and it’s not only a way to increase the effectiveness and productivity also a way
to increase the reliability of the diagnosis[10]. Of course, the reliability is only as good as the
model used, calling for extensive work on development as well as on verification and validation
of the models.
The concept of troubleshooting describes the process of locating the root of a fault or defect and
the appropriate action to resolve that issue. The use of statistical models where the aim is to
mimic the behaviour of a physical system plays an essential role in an effective troubleshooting
process. A fault can be described both with a diagnostic trouble code (DTC), which is the
systematic error flag that describes an occurrence of an abnormality in the electronic control
unit (ECU) and is stored in the ECU it originates from, and through visual observations from
the driver. An example of such an observation could be when the driver detects smoke from the
engine or when the temperature gauge on the ICL is stuck. A short introduction to DTCs can
be found in Section 1.1.
1

Chapter 1. Introduction
As the DTCs are connected to a certain component or system and is traceable, hence also
mappable, through the information given by its corresponding ECU, the visual observations
can have multiple causes and reasons why a need to translate them into a language that the
computer can understand and comprehend arises.
1.1 Short introduction to DTC
The terms DTC and ECU will be used in this thesis and are abbreviations for Diagnostic
Trouble Code and Electronic Control Unit. The DTCs are defined as (according to Scania
Lexicon):
Definition 1.1. (DTC)
A code indicating a discrepancy in an electronic control system (ECU) and providing information
about why the code has been created.
The DTCs are creaked when there is a risk for a function degradation. They should not be
indicating for an unknown fault and should not be false, i.e. a DTC should only exist when
there is a known fault in the a system ECU. In each DTC, there is information contained on
the details of the error. These are summarized in Table 1.1.
Attribute Description
Heading DTC number and diagnostic area.
Detection Description of how the diagnostic test works and when it
reacts. This description should contain threshold values if
applicable.
Cause Description of possible causes to the fault indication.
System reactions The consequences of the fault, how the fault is recognized.
Actions How the faulty component is reached and some brief infor-
mation about repair methods
Table 1.1: A summary of DTC specifications
The DTCs have additional information regarding the status (whether the DTC is active, vali-
dated or passive), the numer of times the DTC has been active, a time stamp (date and time
when it was created in the ECU) and a freeze frame (a snapshot of the operational data at the
time of DTC creation). 1
1Information about DTCs were taken from the Scania Lexicon. This is not available outside Scania.
2

Chapter 1. Introduction
1.2 Objectives
The aim of this thesis is to construct a prototype for guided troubleshooting of the instrumental
cluster in a Scania truck. The overall goal for the thesis is to minimize the cost of repair and
to minimize downtime for heavy vehicles. This is reached by adapting algorithm from research
on troubleshooting and several investigations on the use of Bayesian networks (explained in
Chapter 3) for diagnostics and troubleshooting.
The main objectives of this thesis can be divided as such:
1. Investigate the use of knowledge-based methods for diagnostics
2. Evaluate models and algorithms for effective troubleshooting
3. Perform a study on parameter learning of the Bayesian network via filters
4. Perform a full system analysis regarding performance and reliability
Further, this thesis aims to investigate how such an automated and model-based troubleshooting
system would behave and perform. As the entire chain from fault detection to repair actions
will be investigated, the end result will depend greatly on the separate subsystems and their
performance.
3

Chapter 1. Introduction
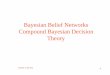
1.2.1 User requirements
The general user scenario for remote diagnostics and troubleshooting is given by Figure 1.1.
Any driver, at any moment, should be able to connect to a central operator that checks the
health status of the vehicle and guides the driver through a troubleshooting process of either
finding a fault or the means to repair it. During this time, the workshop gets a detailed plan
of the vehicle and can prepare for mechanics and spare parts before the driver arrives at the
workshop, which makes the reparation process a lot more cost- and time effective.
Figure 1.1: The user scenario of remote diagnostics
Some requirements of the system given by Scania listed as:
• The possibility to extract fault codes (DTCs) from the vehicle.
• The storage of vehicle information in a central database, a server named Backoffice. This
information will be used by several clients (e.g. assistance or workshops).
• Ability to extract expert knowledge and use this in the diagnostic process (e.g from expe-
rienced mechanics).
• From the given DTCs and other perceived observations from the driver, be able to set a
diagnosis on which component is causing an error or fault.
• Derive the minimum cost of repair from the given diagnosis and extract an action plan on
how to troubleshoot in the most cost-effective way.
• Soft deadlines on events in the diagnostics process, however the user should experience it
as real-time (percieved real-time).
• Ability to establish telecommunication between the driver and the assistance operator
during diagnostics.
4

Chapter 1. Introduction
• Be able to send and initiate tests on the vehicle remotely.
1.2.2 Research at Scania
Scania has been conducting research in this area since 2008 in the project named DiaGuide,
which is partly funded by VINNOVA, Sweden’s Innovation Agency. The project is calculated
to end 2014 with a working prototype. This thesis aims to develop a demonstrator, i.e an initial
prototype that will demonstrate the functionalities and possibilities of the DiaGuide concept.
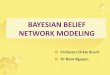
Below is the overall architecture shown in Figure 1.2. The work in this thesis will focus on the
parts outlined with red in the figure, namely the backoffice and the user interface for assistance.
Figure 1.2: The overall architecture of the DiaGuide project.
1.3 Delimitations
Although the overall aim in this thesis is to investigate how a belief network diagnostics system
will perform in heavy vehicles, it’s not possible to consider the whole vehicle in this thesis.
Therefore a delimitation on one part of the vehicle must be made.
The work in this thesis is only focused on the instrumental cluster (ICL) unit. Hence, the
designed model will only consider this ECU. However, it’s important to note that it’s very rare
that one ECU is isolated completely from the rest of the vehicle. It’s very common that several
ECUs share common sensors and/or communication protocols, why these dependencies must
be included in the model in order to acquire a correct model.
Furthermore, the data for the model will be restricted to expert knowledge and some sta-
tistical data, showing the fault probability of certain components given a error log (however,
this dataset will be very limited).
5

Chapter 1. Introduction
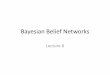
The work will be divided and focused on three subsystems. The information about these are
detailed in Section 1.3.1 below.
1.3.1 Division of subsystems
In order to achieve the requirements given in Section 1.2.1, a division of several subsystems
needs to be done. This is in order to simplify the task but also to make testing and verification
easier, as per unit testing on each subsystem. The four requirements can be divided into three
subsystems as given below:
1. Extraction and insertion of the observations via the Backoffice. The system to handle
these will be considered a subsystem.
2. The diagnostic system where the underlying model will provide for calculation of proba-
bilities of fault.
3. A planner which implements an algorithm to give the action plan which minimizes the
cost of repair, given the diagnostics from the subsystem above.
This is visualised in Figure 1.3 below:
Figure 1.3: The three subsystems of guided remote diagnostics.
6

Chapter 1. Introduction
1.4 Previous work
In the past, extensive research has been conducted on the troubleshooting problem where belief-
network diagnosis has been the point of focus. As Heckerman et. al [1] argues, the primary
objective is not to only detect and determine what is wrong, but also find a strategy on how to
fix that fault. This can be achieved through a set of observations, tests or repairs.
For this thesis, a Bayesian network model of the XPI-system was given in the initial stage, in
order to get familiarized with the use of Bayesian models for diagnostic purposes. The given
model was the result from a previous Master thesis at Scania [11]. This initial model is never
used in this thesis, but inspiration from the structure and the written thesis (cited in this thesis
a couple of times) was taken.
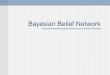
1.4.1 Products on the market
There are a few products in the market today which implements an off-board diagnostic solution,
at least to a certain extent. Volvo Trucks has a product which conducts remote diagnostics
on their trucks while the driver is on the road. The aims are similar to the work of this thesis,
namely uptime management and downtime protection. The remote diagnostic system provides
a detailed analysis of critical fault codes and connects the vehicle to dealer, workshop, original
equipment manufacturer (OEM) and decision-makers [2]. Below in Figure 1.4, the diagnostic
chain is shown.
Figure 1.4: An off-board diagnostic solution by Volvo - Remote Diagnostics [2]
7

Chapter 1. Introduction
1.5 Thesis outline
A thorough review of the underlying theory will be provided for the reader in the first part of
the thesis (Chapter 2 and 4) whilst a slight deviation will be made to further investigate the
use of Bayesian networks in research today (Chapter 3). The reader will also be familiarized
with some native troubleshooting algorithm and cost-minimizing methods. The method that is
used in this thesis will be explained in Chapter 5. In the final part (namely Chapter 6 and 7)
the reader will be guided through the implementation of the given theory and emersion of the
application Assistans+.
In the concluding part (Chapter 8) a discussion about the results will be presented as well as
an outlook on future work and development.
8

Chapter 2
Learning Models
When dealing with uncertainty handling in failure diagnostic systems there are mainly three
theories that are prevalent [12]. Fuzzy logic, Dempster-Shafer evidence theory and the Bayesian
probabilistic theory deals well with uncertainties and allows for design of dynamic probabilistic
systems and calculation of probabilities according to acquired data.
A growing interest for Bayesian networks, which are based on the Bayesian probability theory,
have emerged since the 90’s. The approach have a solid mathematical foundation and are used
in diverse fields of science, ranging from data mining, medical diagnosis, software analysis etc..
To motivate the use of a Bayesian network, an investigation of whether it’s applicable for the
targeted field needs to be conducted.
2.1 Fuzzy logic and Dempster-Shafer evidence theory
As mentioned, some of the evidence theories that deals with uncertainty are Fuzzy logic and
Dempster-Shafer theory. It’s interesting to point out why those theories have been ruled out
in this thesis and why a Bayesian approach is used instead. First of all, the presumptions in
this thesis work paved the way for investigation of Bayesian methods and models. This was
the approach preferred by Scania and the advantages of it had been researched upon in earlier
Master thesis’s [13][11] and PhD dissertations [14].
Even if this was the presumption for this thesis work, the logic behind this decision is rather
clear. Fuzzy sets theory was first proposed by UC Berkely professor Lotfi Zadeh in 1965 which
layed the groundwork for fuzzy logic, which he put forward 1973 [15]. Fuzzy logic handles
mathematical sets, or groups of items, a bit different than most mathematical sets. Usually, an
element either belongs to a set or it doesn’t. In fuzzy logic, elements can belong to different sets
in varying degrees. So certain traits that the element share with the set can be considered while
omitting the rest. In other words, fuzzy logic is applied to make machines see the world in a
9

Chapter 2. Learning Models
more human way. As the human has degrees of truth, so does fuzzy logic. Instead of seeing the
world as either 1 or 0, things might be slightly or almost and hence the machine can act upon
varying degrees of states. Paradoxically, fuzzy logic actually has a high power of precisiation of
what is imprecise [16].
When considering the target system in this thesis, a fault is either found to be existent or it
isn’t, there is no in between. We can’t apply the notion of almost faulty because, as defined in
Section 4.3.1, a variable (or component) is found to be in exactly one finite state. Furthermore,
a single-fault system is considered in this thesis (defined in Section 4.3) which means that the
faulty state is caused by one component which is in one definite fault state.
Dempster-Shafer theory on the other hand was developed as an approach to generalize
probability theory by attempting to combine distinct bodies of evidence [17]. More precise,
Dempster-Shafer theory is a generalization of the Bayesian theory of subjective probability.
The difference being that while the latter commits probabilities for each subject or element at
hand, the degree of belief using the Dempster-Shafer theory is given by a belief function rather
than a Bayesian probability distribution. Hence, probabilities are assigned to sets of possibilities
rather than to single events [18]. This tends to become an unwanted attribute for the target
system in this thesis as the point of interest is to find specific probabilities and a generalization
would be another level of undesirable abstraction.
As a conclusion, it’s made clear in this section why this thesis will consider Bayesian probability
theory only and why the others have been omitted. However, another approach which deems
to be similar to Bayesian methods is Neural networks and it’s useful to investigate this further
and make a conclusion on which approach is best for this thesis.
10

Chapter 2. Learning Models
2.2 A brief comparative analysis of learning models
An analysis on various network models and a comparison between these should be done to
motivate the choice and use of Bayesian network and Bayesian methods. In this section, a brief
comparative analysis with regards to neural networks will be made with a concluding section of
why a Bayesian approach is taken. The motivation for the comparison between neural networks
and Bayesian network is that neural network might seem like an appropriate candidate for the
application field at a first glance.
2.2.1 Neural networks
Neural networks [19] are described by a network of non-linear elements, interconnected through
variable parameters. The input for each element is the weighted sum of the outcome from
other elements, thus mimicking the biological neurons. Artificial neural networks, ANNs (to
distinguish from biological neural networks), are used in machine learning and construction of
artificial intelligent systems [3]. An important note on the subject is that Bayesian methods can
and are implemented on neural networks, they are not only a property of Bayesian networks
[20].
ANNs learn through examples, just like the biological counterpart. Data acquisition and pro-
cessing is done by ANNs and the interconnected elements and their bonds are adjusted to fit
the new data. ANNs are used in different applications, such as speech recognition or classifi-
cation of data and are constantly adaptable to new process data. The underlying motivation
to use ANNs is its ability to derive useful information from complex or incomplete data. The
structure of ANNs allows for recognition of patterns that bypasses humans or other methods. If
performed correctly and taught well, ANNs can use the given information and answer ”what-if ”
questions with great reliability.
2.2.1.1 A single element
The single element (also known as neuron or unit) consists of a single output but several inputs.
There are two modes that can be applied for an element; training mode and operational mode.
In training mode, the element can be set to trigger (or fire) for a certain set of input pattern.
In operational mode, when recognizing a taught input pattern, the associated output state is
given by the element. If the input pattern is not taught to the element, it uses the previously
mentioned rule on whether to trigger or not. The trigger rule can be seen as the threshold value
θ → [0,1]. The value is 1 when the weighted sum of the inputs (or input pattern)∑wi ∗ xi
exceeds or equals the threshold value. Otherwise it’s 0 and the output of the element is not
11

Chapter 2. Learning Models
triggered. The weight is multiplied with the input to give the weighted inputs. This process is
presented in Figure 2.1 below.
Figure 2.1: A Threshold Logic Unit (TLU) [3]
In mathematical terms, the mapping of input-to-output of the non-linear multivariate elements
can hence be described by [20]:
yt = ft(xt) + nt (2.1)
where xt ∈ R corresponds to a set of input variables, yt ∈ R to a set of output variables and
nt ∈ R to the system noise with t = {1, 2, ..., n} representing the time.
2.2.1.2 Architecture of neural networks
Feed-forward networks The feed-forward neural networks only allow information to pass
top-down or bottom-down, i.e only in one direction. These are widely used together with the
common layer representation of neural networks. It consists of an ”input” layer that is connected
to a ”hidden” layer which governs the inputs together with the weights on the connection
between the input and hidden layer.
The hidden layer is then connected to the output layer whose behaviour is governed by the
weights on the connection between the hidden and output layer. This means that when mod-
ifying the weights, each unit or element (seen as a node in Figure 2.2) can choose what is
represents and performs. The output of a layer can never effect the same layer and the output
is an association of the respective inputs. An example of a layered feed-forward network is
shown in Figure 2.2 below.
12

Chapter 2. Learning Models
Figure 2.2: A combined feedforward and layered network [4]
Feedback networks This architecture is characterized by the signals travelling both ways in
the network. Hence, every input calls for an adjustment in each element until the network has
come to an equilibrium. For every new input the network gets, a new equilibrium point must
be found. This type of architecture can make the network extremely powerful and complex. A
feedback network is shown in Figure 2.3 below.
Figure 2.3: A feedback network [4]
13

Chapter 2. Learning Models
2.2.2 Knowledge-based methods
Coming to the Bayesian networks and Bayesian methods, there are four main reasons that gives
it its strength [1].
First of all, the Bayesian network model can handle data that is incomplete. This means that
data can be subject for learning, or parameter adjustment, depending on the behaviour of the
real world (see Section 2.6). In the other case, consider two input variables to the network
that are strongly anti-correlated. Because all inputs are measured in every case, this correlation
is not a problem for the standard supervised learning techniques. In other cases, this would
provide a problem as they are not able to encode across the two variables. But as explained,
this is solved by Bayesian networks.
Secondly, as mentioned already, Bayesian networks are subject for learning and for setting of
casual relationships. This becomes powerful in two cases. One, where the aim is to gain an
understanding of the problem domain, for example during exploratory data analysis. Two, it
allows us to make predictions in the presence of interventions about casual relationships.
Thirdly, the Bayesian networks allow for use of both statistical data and expert domain knowl-
edge. This means that the experience and knowledge of real-world cases is given a forum for
interaction, which become extremely beneficial and useful when the statistical data is scarce or
expensive to collect.
Heckerman [1] gives the fourth reason when stating:
”The fact that some commercial systems (i.e., expert systems) can be built from prior knowledge
alone is a testament to the power of prior knowledge. Bayesian networks have a causal semantics
that makes the encoding of causal prior knowledge particularly straightforward. In addition,
Bayesian networks encode the strength of causal relationships with probabilities. Consequently,
prior knowledge and data can be combined with well-studied techniques from Bayesian statistics.
Four, Bayesian methods in conjunction with Bayesian networks and other types of models offers
an efficient and principled approach for avoiding the over-fitting of data. As we shall see, there
is no need to hold out some of the available data for testing. Using the Bayesian approach,
models can be ”smoothed” in such away that all available data can be used for training.”
14

Chapter 2. Learning Models
2.2.3 Conclusion of analysis
With knowledge about both neural networks and Bayesian networks, it’s easy to see that there
exists similarities between them. So in order to draw a conclusion on which method is better
suited for this thesis, a review on the requirements (given in Section 1.2.1) is needed. The
chosen method does not only have to fulfil the requirements but also have to be efficient and
easy to use. Also, the lesser information that is needed for creating a correct model, the better.
This is partly because of the limited access to fault data in this thesis work, but also since there
isn’t always complete data at hand to build the models from.
While referring to the requirements in Section 1.2.1, a mapping to the characteristics of the two
methods are conducted. The most significant feature desired in the chosen method is the ability
to extract expert knowledge about the system when creating the model. Hence, it’s not only
important to be able to use statistical datasets but also, for example, having the possibility to
adhere to deviations from the general case (i.e, the expert knowledge).
In this regard, Bayesian networks provide a strong tools to utilize that knowledge in the
models. The a priori probabilities (see Section 2.4) can be set accordingly to the degree of
belief of the expert, e.g the mechanic.
Furthermore, for the construction of a neural network, a substantial set of data need to be
present in order to teach the network and adjust the weights as explained in Section 2.2.1.
Access to such data, in sufficient amount, is very limited in this thesis. This means that using
neural network would render either a poorly accurate model or a dysfunctional model altogether.
Bayesian network solves this with its ability to set probabilities from experience.
Lastly, Bayesian networks have been proposed as the preferred choice of modeling technique by
many authors on decision analysis and uncertainty reasoning [21] [22] [23]. This gives a valid
reason and support to take the approach of Bayesian networks, as it’s shown in research to be
the preferred technique.
15

Chapter 2. Learning Models
2.3 Bayesian Networks
Bayesian networks (BN), also known as belief networks, fall under the category of probabilistic
graphical models (GM). The aim for these models are to describe and represent knowledge
about an uncertain domain, either by the use of expert knowledge, statistical data and / or
computational methods. The Bayesian network is composed of random variable nodes, with
edges between nodes to describe the probabilistic dependencies between the connected variables
[24]. A clear distinction from ”classical” probability is that Bayesian probability is also a
property of the expert who assigns the probability, in other words the experts belief in a certain
outcome also has an impact on the outcome of the model.
Bayesian networks are structured as directed acyclic graphs (DAG) [25] and provide an effective
representation and computation of the joint probability distribution (JPD) over a set of random
variables [25] (explained further below). The Bayesian network provides an intuitive and com-
prehensible way of understanding complex systems and their interdependencies, while at the
same time being mathematically rigid. The causal relationships between the random variables
are exposed and expressed in the form of probabilities. The directed graph helps to visualize
the probabilities and the causal relationship of nodes [26]. A simple DAG is shown in Figure 2.4
below.
Figure 2.4: A directed acylic graph (DAG)
16

Chapter 2. Learning Models
As mentioned, a Bayesian network consists of a set of random variables. These are represented
as a single node in the network. Each node either has a minimum of one parent, minimum of
one child or both. A node X is a parent of another node Y if there is an arrow from node X to
node Y. In Figure 2.4, A is the parent of B.
Also, an arrow from node X to node Y means that X has a direct influence on Y. However, every
node in the network are in some degree dependant on each other and a change in a set of nodes
in one part of the network will effect another part, even if they are not directly connected. This
is the power of Bayesian network and its representation of causal relationships among random
variables.
Two important properties that comes with a Bayesian network are:
1. The network is a compact representation of the joint probability distribution (see Sec-
tion 2.4.1) over the variables.
2. The network encodes the conditional independence relationships (see Section 2.4.2) be-
tween the variables in the graph structure.
17

Chapter 2. Learning Models
2.4 Bayesian probability theory
The concept of probability theory that most are familiar with and associate with the term
”probability” is what is known as classical, true or physical probability [1]. It denotes the
actual physical probability of an event, for example the 50/50 probability that a coin will land
on its head (if we disregard the possibility that it might land on the edge). When determining
physical probability, a series of tests needs to be conducted to find the appropriate value of the
probability for a certain event. We might for example toss the coin a hundred times and analyse
the results to determine the probability for the coin to land on its head.
Outcome Amount Probability
Head 45 0, 45
Tail 55 0, 55
Table 2.1: A simple coin toss test to determine the true probability
Bayesian probability differs from this definition as it describes a person’s degree of belief in the
occurrence of a certain event. This means that expert knowledge is utilized when asserting the
probabilities. Where classical probability only considers the test results, Bayesian probability
or personal probability considers other factors that could influence the outcome as well.
Also, an important note on Bayesian probabilities is that the probability value does not have to
be static, which is also true for physical probabilities. The probability given to the occurrence
of a certain event prior to a trial is known as the a priori probability of that event. This is the
known probability of the event without any prior knowledge of the outcome. Depending on how
the a priori probability has been obtained, the reliability of the outcome is affected. The a priori
probability can be obtained through expert knowledge, statistical analysis or a combination of
the two [1]. In extent, the a priori probability can be manipulated and changed depending on
a set of trials or tests. This is known as parameter learning. An extensive explanation on this
subject is given further under Section 2.6.
2.4.1 Joint probability distribution
In the previous section, the Bayesian approach to probability assertion has been discussed. To
implement this on a Bayesian network where a representation of a set of random variables struc-
tured in a DAG is given, the notion of joint probability distribution (JPD) is introduced. The
Bayesian network efficiently encodes this JPD (which can consist of both physical or Bayesian
probabilities) for a large set of random variables. Let X={x1, x2, ..., xi} denote a set of ran-
dom variables in the network S, and let P={p1, p2, ..., pi} be the associated probability for each
variable. Further, Pai is the parents to a certain variable (seen as a node in the network) and
18

Chapter 2. Learning Models
the variables corresponding to those parents. For a specific network S, the joint probability
distribution for the set X is given by [1]
p(x) =n∑
i=1
p(xt|pai) (2.2)
The probability of p(xt|pai) describes the probability that the variable xi will occur given the
information of its parents and their associated probabilities pai. This is also known as the
conditional probability of the variable xi based on the knowledge of pai.
When two variables, Xi and Yi, are completely independent of each other, the joint probability
distribution is simplified to P(Xi=x,Yi=y) = P (Xi = x) ∗ P (Yi = y). We know that two
variables are independent if they fulfil
P (xi|pai) = P (xi) (2.3)
and
P (pai|xi) = P (pai) (2.4)
Example 2.1. Given the DAG in Figure 2.4, an example of what the joint probability for each
node can look like is given by the table below:
A P(A)
false 0.6
true 0.4
A B P(B | A)
false false 0.01
false true 0.99
true false 0.7
true true 0.3
B C P(C | B)
false false 0.4
false true 0.6
true false 0.9
true true 0.1
B D P(D | B)
false false 0.02
false true 0.98
true false 0.05
true true 0.95
Table 2.2: The joint probability table for Figure 2.4
19

Chapter 2. Learning Models
2.4.2 Conditional independence
A property from probability theory that is used heavily in Bayesian networks is the notion of
conditional independence. It is said that given its parents, a node is conditionally independent
of its non-descendant. In other words, given the knowledge of occurrence of a random node Z,
two random variables X and Y are said to be conditionally independent if and only if, given
any value of Z, the probability distribution isn’t changed for X for all values of Y, and vice
versa [27].
Figure 2.5: Given its parents (A), a node (B) is conditionally independent of its non-descendants (E).
Consider Figure 2.5 above. We know by Equation 2.3 that node B is independent of node E if
P (B|E) = P (B). A definition for conditional independence can be described as below.
Definition 2.1. (Conditional independence)
Consider Figure 2.5. Then, a random variable B is independent of E, given D, if and only if
P (B ∩ E|D) = P (B|D)P (E|D) (2.5)
or equivalently
P (B|E ∩D) = P (B|D) (2.6)
20

Chapter 2. Learning Models
2.5 Definitions
As already stated in the previous section, the upper-case X denotes a set of stochastic variables
in the Bayesian network and the lower-case x represent a single variable (or parameter) in the set
X. The variable set X is thus said to be in configuration x. Furthermore, given the information
θ, the probability that X = x is given by the probability function p(X = x |θ) (or p(x |θ) in
short). The same notion is used to denote the probability distribution for X. The probability
function tells us that ”given information/event θ, the probability of configuration x in set X is
given by p(x |θ)” [1].
The probability distribution p given by the probability function ranges to the space of real
number from 0 to 1. In other words, P(X)→ [0,1], where P(X) is the power set of X. Therefore,
the definition of the distribution p is strictly positive. Since the function is called on a set of
variables, the notion of p(x ∩ θ) to describe the probability of two events, x and θ, can also be
made. This is explained as conditional probability and is explained by the well-known Bayes’
formula [28].
P (X|θ) = P (X)P (θ|X)
P (θ)(2.7)
In earlier section the a priori probability was explained as the probability of an event without
any prior information. In the definition above, the posterior probability is given as P(X|θ),which is the probability of event X given some information θ. The probability P(θ|X) is the
likelihood of θ given X. The last term, P(θ) acts to normalize the quotient and is expanded to:
P (θ) =∑
P (θ|Hi) =∑
P (θ|Hi)P (Hi) (2.8)
The expansion is motivated by the fact that P (θ|Hi) and P(Hi) is easier to determine or find
than P(θ). The formal definition of a Bayesian network is described in definition 2.2.
Definition 2.2 (Bayesian Network). [29]
A discrete Bayesian network described as N = (X, G, P) consists of:
• A DAG G={V, E}, where V ={v1, v2, ,vi} are the nodes connected via directed arcs E.
• Random variable set X={x1, x2, , xi} which are represented in the network by the node
set V in graph G, so that xi corresponds to node vi.
• A set of conditional probability distributions P with one distribution P(xv|xpa(v)) for each
xi in set X.
21

Chapter 2. Learning Models
The definition above is well visualised in Figure 2.4. However, the nodes in the network can
be classified into subclasses of causes-issues-symptoms [5]. This helps to understand the casual
relationships even more and it’s easier to set evidence on the correct node. The three subclasses
can be explained as:
1. Cause: The root cause of a fault and in most cases the component or element to repair.
For example – ”Broken heat sensor”
2. Issue: A conflict among a set of causes. An issue occurs when its associated causes occur.
3. Symptom: An indication of a faulty system is given as a symptom. For example –
”Temperature gauge is stuck on low”.
This structure is shown in Figure 2.6 below.
Figure 2.6: The Bayesian-network structure, consisting of an interdependent set of issues [5]
2.5.1 Inference in Bayesian networks
When the Bayesian network is constructed properly and asserted with a priori probabilities, the
posterior probabilities can be determined via interference with the models and by providing the
network with an information set θ = {θ1, θ2, ..., θi}. For every unique set of information θ,
the posterior probabilities will change. These probabilities are not stored in the model and is
therefore computed upon every request. This is known as probabilistic inference [1]. In general,
probabilistic inference is an NP-hard task [30].
For a vehicle, the information set would constitute of either error codes generated by the ECUs
whenever an internal fault arises or an error observation where the input is a symptom of fault
on the vehicle as seen by for example the mechanic.
22

Chapter 2. Learning Models
2.5.1.1 Query-Based Inference
Another approach to Bayesian inference is to only compute the posterior probabilities over a set
of target variables in a given set. This is known as query-based inference [30]. In other words,
given the Bayesian network model N = (X, G, P) and a query Q = (N, T, e) where T ∈ X is
the target set and e is the evidence set. The result of an query-based inference is the posterior
distribution over the target set of variables, without having to compute for all variables in the
network. The motivation for using a query-based inference might relate to time requirements
or performance issues (only a target of variables are of interest, hence making it unnecessary
to compute over all variables in the network). This approach will however not be used in this
thesis. In the diagnostic process, all variables and their posterior probability is of interest and
there are no benefits to targeting a certain set of variables only in this thesis. Query-based
inference is therefore only introduced shortly.
2.6 Parameter learning via Kalman filters
The Kalman filter is a set of recursive mathematical equations that estimates the current state
of a process and are widely used in the area of autonomous or assisted navigation. The filter
supports estimations of the past, present and even future states and can do so without precise
nature of the modelled system [6]. The Kalman filter is one of the most important and common
data fusion algorithms in use today, and typical use of the filter include smoothing of noisy data
and providing estimates of parameters of interest [31]. The latter is relevant to this thesis.
However, it’s important to note that Kalman filters will not be implemented in this thesis due
to time constraints. The purpose of this section is to aid future discussions on improvements
on the model and to demonstrate what can be done.
2.6.1 Problem statement
If the state of a system at time t evolved from the prior state at time t-1, the assumption of the
state is then
xt = Atxt−1 + Btut + wt (2.9)
where xt is the state vector containing the term of interest, ut is the vector containing control
inputs, At is the state transition matrix which applies the state from t-1 on time t (e.g. the
previous state effects the current state), Bt is the control input matrix that applies the effect of
the control input parameter in vector ut on the state vector, and wt is the noise term.
23

Chapter 2. Learning Models
System measurements can be performed according to the equation
zt = Htxt + vt (2.10)
where zt is the measurement vector, Ht is the transformation matrix and vt is the noise.
The noises vt and wt are assumed to be independent of each other, white, and with normal
probability distributions
p(w) ∼ N(0, Q) (2.11)
p(v) ∼ N(0, R) (2.12)
The process noise covariance Q and measurement noise covariance R matrices are assumed
constant, although they might alter in practice over time.
The Kalman filter can be written as a single equation, but its usually conceptualized as two
distinct phases: ”Predict” and ”Correct”. The predict phase uses the state estimate from
previous time t-1 to produce an estimation of the state at current time t. Its also known as the
a priori state estimate. The correct phase, the current a priori prediction is combined with
current observation information to improve the state estimate. The term is also known as the
posteriori state estimate [32]. This is given in Figure 2.7 below.
Figure 2.7: The ongoing discrete Kalman filter cycle. [6]
The following notation in the form xn|m represents the estimate of x at time n given observations
up to, and including time m. The state of the filter is represented by two variables:
• xt|t, the a posteriori state estimate at time t given all observation up to, and including
time t.
• Pt|t, the a posteriori error covariance matrix.
24

Chapter 2. Learning Models
The two phases described above can be summarized into the following equations, which states
the implementation of the Kalman filter [6].
Predicted (a priori) state estimate
xt|t−1 = Atxt−1|t−1 + Bt−1ut−1 (2.13)
Predicted (a priori) estimate covariance
Pt|t−1 = AtPt−1|t−1ATt + Qt (2.14)
Correct (a posteriori) state estimate
xt|t = xt|t−1 + ttyt (2.15)
Correct (a posteriori) estimate covariance
Pt|t = (I −KtHt)Pt|t−1 (2.16)
where optimal Kalman gain Kt and innovation residual yt is described by Equation 2.17 and 2.18
respectively:
Kt = Pt|t−1HTt S−1t (2.17)
yt = zt −Htxt|t−1 (2.18)
where the innovation covariance St is given by Equation 2.19:
St = HtPt|t−1HTt + Rt (2.19)
2.6.2 Conclusions
The theory given in this section provides a mathematical basis for further discussions on the
use of Kalman filters for parameter estimation. The data that can be used is fault records for
the specified vehicle, and over time as the filter is applied for a large set of data, the filter will
diverge the probability parameters in the Bayesian network to an equilibrium state. This will
represent the true a priori probability for any given variable in the network.
25

Chapter 2. Learning Models
The author proposes the use of Kalman filters to acquire a correct model of the system. It’s
important to note that in order for a successful parameter estimation, a large set of training
data will be needed for the network and filter. Once the correctness of the model is within
a given threshold value, the training data can consist of operational data from real diagnostic
cases.
2.7 Summary
In the summation of this chapter about learning models, the most significant finding is the
Bayesian method approach taken and the motivation behind it. The chapter have also discussed
the pros and cons with the methods and in particular Bayesian methods, Neural networks,
Fuzzy logic and Dempster-Shafer evidence theory, and the conclusion that Bayesian
methods are best suited for the work in this thesis were drawn.
Following this choice, an introduction to Bayesian networks were made with given examples of
Bayesian probability theory and its application. A slight deviation was made in Section 2.6
where parameter learning via Kalman filters were explained and a proposal for future work
following this thesis were given.
26

Chapter 3
Previous research on Bayesian
methods for diagnostics
Over the years, Bayesian methods have been used for diagnostic purposes in many applied
researches. A lot of these are similar to the work of this thesis, why it’s beneficial to look further
into these researches and investigate the possibility for Bayesian methods in this field. In this
Chapter, the reader will be oriented in applications or researches that use Bayesian methods for
diagnostics, and it serves a purpose as a framework to build upon and draw inspiration from for
the work in this thesis. This will be focused on both auto mobiles and vehicles but also other
applications where Bayesian networks have proven to be a useful and efficient tool.
3.1 Bayesian network for vehicle systems
Don Thompson (Pepperdine University) and Wojtek Przytula (HRL Laboratories, LLC ) [33]
have proposed a process for construction of Bayesian network specifically for diagnostics pur-
poses. They conclude that Bayesian network provide a powerful tool for diagnostic and that
the main problem is in the construction of the models for the targeted system. They propose
a computational method of deriving probabilities, showing that they’re ease obtained from do-
main experts and statistical repair data. Their approach will provide support in this thesis
when creating the model.
Matthew Schwall and Christian Gerdes at Stanford University [7] have presented a methods for
processing and analysing residuals for the purpose of fault detection using probabilistic methods.
Their analysis focuses on a car’s handling system. The derived Bayesian network is shown in
Figure 3.1 below.
27

Chapter 3. Previous research on Bayesian methods for diagnostics
Figure 3.1: Bayesian network structure for vehicle stability control system [7]
In Figure 3.1, identified faults {F1, ..., F10} and defined residuals {R1, ..., R5} (shaded boxes) are
modelled in the Bayesian network. The ”hidden” nodes that are shown in dashed boxed are the
assumptions made in while deriving the model in order to make the graph easier to construct
and more understandable.
They conclude that the direct use of residual values as evidence in the Bayesian network calls
for continuous probability distribution. As they implemented exact inference, it was a limiting
factor for the applicability of the method. They therefore propose to research further on approx-
imate solutions. Their research shows how Bayesian network can be used in a small subsystem
(in this case the vehicle stability control system) in order to analyse faults.
3.2 Bayesian network for diagnostics
Bayesian networks are used vastly in a diverse range of applications. The use of Bayesian
networks are not only limited to auto-mobile diagnostics, but can be used in other fields as well.
Bayesian networks have successfully been used in diagnostics purposes in a wide range of fields.
Steam turbine diagnostics [34], female urinary incontinence [35], penetrating injury assessment
[36] and troubleshooting of satellite communication ground equipment [37] are all examples of
how Bayesian networks can (and are) used in various fields. This shows the power of Bayesian
networks and further prove the method to be solid for uncertainty reasoning.
28

Chapter 3. Previous research on Bayesian methods for diagnostics
3.3 Summary
This chapter have briefly presented some research of Bayesian networks for diagnostic pur-
poses and how it can be applied to various fields. Also, the chapter touched upon some of
the challenges when dealing with Bayesian networks, namely performance and time issues in
the implementation of exact inference and the challenge in the construction of the Bayesian
network.
29


Chapter 4
Decision-Theoretic Troubleshooting
In the previous chapter the underlying theory behind the model was presented. The derived
model will be used for troubleshooting a fault and determining the cause. In this chapter, the
theory of decision-theoretic troubleshooting is presented. Decision-theoretic deals with identi-
fying vales, uncertainties and other issues relevant in a given decision and results in a optimal
decision [38]. This will be used when deriving the action plan for the given diagnosis and
calculated error probability distribution of the components.
4.1 The troubleshooting process
In extent to diagnosing the fault or computing the error probability distribution in the Bayesian
network model, the complete troubleshooting process involves correcting or repairing the de-
tected issue or cause. The course in which this can be taken is given by Heckerman et. al. [5]
where the troubleshooting cycle is demand driven and consists of five explicit steps:
1. Database access: A symptom is given of some fault and this is regarded as an input to
the system.
2. Construction of a Bayesian network: The relevant information is extracted for the
construction of a Bayesian network.
3. A BN solution: Using the constructed network, a set of recommendations are given for
components to repair or observe.
4. Execution: The user performs the recommended actions and new inputs are given. Step
1-4 is repeated until satisfactory results (i.e solved problem).
5. Case recording: Upon termination of a session, the distributions (a priori probabilities
in this case) are updated regarding to the new information.
31

Chapter 4. Decision-Theoretic Troubleshooting
The steps above describe the entire troubleshooting process as recommended by Heckerman. In
this thesis, the Bayesian model is given in advance and no case recording is performed, since
there is no implementation of parameter learning in this thesis. Hence, the information recorded
won’t be used (see ”Parameter learning” in Section 2.6), which narrows the steps to include
1-3-4 only.
4.2 The optimal decision tree
As mentioned above, the troubleshooting process does not only entail that the cause of the
failure in the system is exposed, but also that there is a plan on how to repair or fix the issue.
There are many possible observations, tests and repairs that can be applied to a certain problem
in order to fix the malfunction in the most effective way. However, these operations differ in the
amount of time needed and/or cost. This is why it’s essential to find the most efficient way to
solve the problem. In this thesis, the term efficient is used to describe the plan which minimizes
the ECR, short for expected cost of repair. The ECR is further explained in Section 4.5.
The traditional way of computing this expected cost is through a decision tree, such as described
by Raiffa [39]. The decision tree helps to understand the chain of events that leads up to solving
the problem. If done correctly, a decision tree can give information of all the routes which leads
up to a solution, hence allowing for a comprehensive evaluation on which plan is best to take
in order to minimize the ECR.
Definition 4.1 (Decision tree). A decision tree consists of decision nodes, that forms a rooted
tree. The root has no incoming edges. The tree is drawn as a tree consisting of multiple branches.
The decision node represents a decision: an irrevocable allocation of resource. The branches of
a decision denotes that each option is mutually exclusive. A node may hold a probability vector
indicating the probability of a certain outcome of that decision [40].
Example 4.1. In Figure 4.1, the decision tree for a two-component device is represented and
the possible outcomes for certain actions. In the initial state, at the far left decision node, there
are three routes to take. Either an observation is made, which leads to a higher certainty on the
cause of a symptom, or a repair action is taken without any further observation, for either c1
or c2. To calculate the total costs for the routes, the tree is rolled back from the far right. The
cost for each repair action is at the final branches. The cost is calculated as the cost for the
possible action times the probability of that event. For example, the cost for first performing an
observation o and then repairing c1 is 17.
(5 + 10) ∗ 0, 9 + (5 + 10 + 20) ∗ 0, 1 = 17
The total expected cost for the observation route is calculated in the same manner as:
32

Chapter 4. Decision-Theoretic Troubleshooting
min(17, 34.9) ∗ 0, 8 +min(28, 30) ∗ 0, 2 = 19, 2
Figure 4.1: A decision tree representing all the possible solutions for troubleshooting a devicewith two components [8]
We find that in the example shown, the most efficient action would be to first make an obser-
vation o and then decide on which component to repair depending on the path that minimized
the expected cost. In the case o = true the component c1 should be repaired first. If o = false
then component c2 should be repaired first.
An important note to make is that with increasing amount of components, the decision tree
grows exponentially. Hence, it’s important to find a strategy of how to determine whether to
repair or observe at each stage.
33

Chapter 4. Decision-Theoretic Troubleshooting
4.3 General assumptions of decision-theoretic troubleshooting
As mentioned, the troubleshooting can become immensely complex and with the growth of
components, tests and observation routes, the complexity grows exponentially. This means that
in order for it to be possible to identify an optimal troubleshooting algorithm, some assumptions
about the system needs to be made.
Definition 4.2 (Troubleshooting assumptions). Consider a device with n components that is
represented by the variables c1, c2, ..., cn and that each component is exactly in one finite set
of states. Then the assumptions are as follows [5]
1. At the initial stage of troubleshooting, the device is faulty. In other words, there is a
component that are in a state other than ”normal” in the device.
2. Only one component is considered to be faulty and hence the approach is on a single fault
assumption. If pi denotes the probability that component ci is faulty given the current
information of the state on the system, then a single fault assumption would give that∑pi = 1.
3. The state of the device, whether fixed or still faulty, can be observed with the cost Cp
after a repair.
4. Each component is either observable or unobservable. An observable component can be
tested or inspected to find if the component is causing the failure of the device. If the
component is observed to be faulty, it must be repaired or replaced immediately. An
unobservable component is such that it can’t be observed but can be repaired or replaced.
Hence the cost for ”observing” an unobservable component is equal to the sum of the cost
of repair and Cp.
5. The observation and reparation cost for the component is independent of any previous
observation and repairs performed on the device. Hence the costs are considered fixed and
independent.
Furthermore, the class of problems in the system being modelled are those whose dynamics can
be explained as stochastic processes, where the actions – translated as inputs to the system model
– has a direct influence to the system’s behaviour. In the troubleshooting process, a probability
distribution of the possible next states in the system depends on the system’s current state and
the choice of action by the decision maker (i.e the mechanic, driver or assistance operator) [41].
34

Chapter 4. Decision-Theoretic Troubleshooting
4.3.1 Stochastic dynamical system
The system to be modelled are considered to be a stochastic dynamical system: a system which
can be in one of a number of distinct states in any given point in time and whose state only
changes with the initiation of an action, also called an event. The purpose of the event is to
change the system’s state in order to reach the goal state, which is when the system is in a
repaired, or fixed, state.
The system to be modelled consists of random variables, both directly dependent or conditionally
independent (see Section 2.4.2). Given a finite state space S = {s1, s2, ..., sn} where a variable is
found to be in exactly one finite state, in most cases there isn’t complete information about the
current state of the variable or the system. Hence, this uncertainty or incomplete information
is represented as a probability distribution over the states in S [41]. This distribution plays a
vital role in the troubleshooting process, as the decision maker will act on the action plan which
is based on the current state – or the distribution of the most likely states when dealing with
uncertainty – in order to reach the non-faulty state.
35

Chapter 4. Decision-Theoretic Troubleshooting
4.4 Troubleshooting strategies
Troubleshooting actions can be classified into three main groups. They can either be to observe
a component in order to find if it’s faulty or not, or they can be to perform a test that will
provide more information about the fault. Finally, a repair can be performed upon finding the
faulty component.
As mentioned, the primary goal for efficient troubleshooting is to find the sequence which
minimizes the expected cost of repair. This optimal sequence is denoted as the troubleshooting
strategy (TS-strategy). Although it’s possible to find a very efficient TS-strategy, it’s very
difficult to find a completely efficient one. The complexity increases with the growth of the
system which the query is executed on. It is therefore often satisfactory to get the suboptimal
TS-strategy, i.e an optimal strategy given a certain condition.
However, the fault will usually get detected before the last action in the TS-strategy and then
the performed action will form the TS-sequence for the issue. An example of TS-strategy and
TS-sequence is given in example 4.2.
Example 4.2. Given a three component device with components A, B and C, it is found that
the optimal strategy that minimizes the cost of repair is given by STS=(Bo,Ao,Co). The sub-
index o denotes that it’s an observation. For simplicity no tests are available. The possible
TS-sequences are then given as below.
TS-strategy Faulty component TS-sequence
B, A, C A B, A
B, A, C B B
B, A, C C B, A, C
Table 4.1: An example of different TS-sequences
36

Chapter 4. Decision-Theoretic Troubleshooting
4.5 Expected cost of repair
The expected cost of repair (ECR) is a measure on how cost effective a TS-strategy is and
the goal for a successful troubleshooting in the cost optimization perspective is to find the best
TS-strategy that will give minimum cost.
Definition 4.3 (ECR). Let Coi and Cr
i denote the cost of observation and cost of repair for
component ci. Given that we observe and consequently repair (upon detection of a faulty
component) components in a order (c1, c2, ..., cn), then the expected cost of repair is described
as below [8]:
ECR(c1, ..., cn) = (Co1 + p1(C
r1 + Cp)) + (1− p1)(Co
2 +p2
1− p1(Cr
2 + Cp))
+(1− p1 − p2)(Co3 +
p31− p1 − p2
(Cr3 + Cp)) + ...
=
n∑i=1
[(1−i−1∑j=1
pj)Coi + pi(C
ri + Cp)] (4.1)
This means that component c1 is observed at the cost of Co1 . With the probability p1 it’s found
that the component is faulty and it’s repaired at the cost Cr1+ Cp . With probability 1-p1 the
component is not faulty and the next component c2 in the order is observed at the cost Co2 .
With probability p2/(1-p1) its found that c2 is faulty and is repaired at the cost Cr2+ Cp; and
so on.
4.5.1 Efficiency index
The primary task when finding the optimal troubleshooting sequence that minimizes the ex-
pected cost of repair is to find the suitable TS-strategy that satisfies the expression min(ECR).
This is done by classifying the order in which components are observed, by calculating the
efficiency index.
ef =piCoi
(4.2)
The efficiency index ef ranks the components in the order they should be observed based on the
cost of observation and the probability of the component causing the fault. So the component
with the highest ratio ef is observed first and then the components are observed in a descending
order depending on the efficiency index until the faulty component is found (and the problem
solved).
As the order according to the efficiency index gives the optimal TS-strategy, this also means
that it minimizes the total expected cost for repair (and troubleshooting). In other words,
37

Chapter 4. Decision-Theoretic Troubleshooting
if the construction of the troubleshooting sequence S is done with regards to the order of
the components with respects to descending efficiency, an ”optimal” sequence is guaranteed.
However, this only holds true for a sequence consisting only of observations and repairs. If test
are included, this is no longer a valid argument [5]. The reason for utilizing the efficiency index,
is to combine the knowledge given by ECR – with respect to descending ef – with the calculation
of estimated cost of repair after tests(ECRT). This will be discussed further in Section 4.6.
To calculate the efficiency index, the posterior probability pi need to be computed as well as
having the information about the cost of observation for component Ci as given by equation
4.2. By ordering the components based on the descending order of the efficiency index the
expression min(ECR) is fulfilled, as given by equation 4.1. A summary of the plan for the
optimal observation-repair sequence can hence be described as following:
1. Calculate the posterior probabilities for all components in the device given the information
of a malfunction.
2. Compute the efficiency index for each of the components and list them in a descending
order.
3. Observe the component with the highest efficiency index.
4. If found to be faulty, the component is repaired or replaced. Otherwise, go to step 3.
5. If a component is repaired, check if the problem is solved and the device is working.
4.5.2 The cost distribution
As mentioned earlier, the troubleshooting strategy is used to declare the sequence in which the
observations (and consequently the repair) will follow. However, it’s the efficiency index that
shows which TS-strategy minimizes the expected cost of repair. Hence, a combination of them
both will render the most cost-efficient strategy.
While it’s stated to be cost-effective, the term also denotes the time and resource costs involved
as these are included in the cost calculation of each component.
38

Chapter 4. Decision-Theoretic Troubleshooting
Example 4.3. In Table 4.2 below, the costs for observing and repairing different components
(given a device with three components: A, B and C) are presented. For simplicity, no tests are
available.
Component Prob. Obs. Cost Rep. Cost
A 0.2 5 50
B 0.7 11 47
C 0.1 15 32
Table 4.2: Cost of observation, repair and probability of fault for all components
Given a particular TS-strategy of S = {C, A, B}, the cost distribution for this strategy can be
calculated as given in Table 4.3 below. When a component is found to be faulty, it’s repaired
and then the device is observed again at the cost of 10, in order to make sure the repair was
successful.
Faulty component TS-sequence cost
A 80
B 88
C 57
Table 4.3: Estimated cost of repair for different TS-strategies
Table 4.2 and Table 4.3 reveals that there are a 20%, 70% and 10% chance of ending up with a
repair cost of 70, 78 and 47 respectively. The estimated cost on the other hand is an approxi-
mation of the final cost of repair without knowledge about the faulty component. Thus, the ECR
is calculated from Equation 4.1 as:
ECR = (Co1+p1(C
r1+Cp))+(1−p1)(Co
2+p2
1− p1(Cr
2+Cp))+(1−p1−p2)(Co3+
p31− p1 − p2
(Cr3+Cp))
with corresponding values and Cp = 10:
ECR = (15+0.1(32+10))+(1−0.1)(5+0.2
1− 0.1(50+10))+(1−0.1−0.2)(11+
0.7
1− 0.1− 0.2(32+10))
which gives an ECR = 72,8.
39

Chapter 4. Decision-Theoretic Troubleshooting
If the efficiency index ef would be used instead of ”guessing” a TS-strategy and hoping for the
best, the estimated cost of repair would be minimized every time. Since the efficiency index
uses the posterior probability, the values will change upon every change of knowledge to the
Bayesian network (i.e. for every new action or observation). An example on how the efficiency
index is used is given below:
Example 4.4. Using Equation 4.2 in combination from the cost information in Table 4.2, the
efficiency index ef can be calculated. Given the same three-component device in the previous
example, the efficiency index is shown in Table 4.4 below.
Component Prob. Obs. Cost Efficiency index
A 0.2 5 0.04
B 0.7 11 0.063
C 0.1 15 0.0066
Table 4.4: Efficiency index for all three components
If the proposed strategy given by Table 4.4 is used, i.e. in a descending order with respect to the
efficiency index giving a TS-strategy of S = {A, B, C}, the expected cost of repair is calculated
using Equation 4.1.
ECR = (5+0.2(50+10))+(1−0.2)(11+0.7
1− 0.2(47+10))+(1−0.2−0.7)(15+
0.1
1− 0.2− 0.7(32+10))
which equates to an ECR = 71.4. Thus, the expected cost has been reduced with 1.4 by a simple
ordering with respect to the efficiency index.
40

Chapter 4. Decision-Theoretic Troubleshooting
4.6 Estimated cost of repair after tests
In order to fully make use of the power in decision-theoretic troubleshooting as proposed by
Heckerman et. al [8], more information is needed in the process. As tests are introduced (defined
in Section 6.3.1 for this thesis), the algorithm for troubleshooting can look further and assess the
best route by evaluating the probability for certain test outcomes. This provides the efficiency
of the TS-algorithms and the troubleshooting process.
A value for the tests must be defined. It’s referred to as the expected cost of repair after test
(ECRT) and is specified for each tests. The ECRT is calculated as the ECR for the possible
test outcomes plus the cost of performing the test. The ECRT is given by Equation 4.3.
ECRTj =
Q∑i=1
p(Tj = qi|ε)× ECR(Tj = qi|ε) + CTj (4.3)
the sum is over q1, q2, ..., qQ where Q is the amount of possible outcomes for test Tj and CTj is
the cost for test Tj .
Since Equation 4.3 is dependent on the probability p(Tj = qi|ε), is relies on current information
about the system. For each evaluation of ECRT, the information must therefore be extracted
from the Bayesian network.
The outcome of the test are considered the possible states of Tj . For example, a test T : Did
the temperature gauge move? has the states q1 = Y es and q2 = No.
4.7 Summary
In this chapter an introduction to decision-theoretic troubleshooting was presented. The the-
ory in this chapter serves a purpose to gain an understanding on how to proceed with the
troubleshooting of heavy vehicles, primarily via calculation of a troubleshooting strategy and
calculation of the estimated cost of repair.
41


Chapter 5
Method
The general method used in this thesis is a traditional system engineering process method, the
V-model. The reason for using the V-model is that verification is a major part of the process,
which is essential in this thesis in order to analyse the use and performance of the designed
system. The method is presented briefly in Figure 5.1 below.
Figure 5.1: The overall process in the V-model [9]
Although the work in this thesis has followed the V-model method to a large extent, some
alternations have been made to suit the thesis particularly. This includes omitting some of the
stages in the process such as ”Validation planning”, ”Installation qualification” and ”Validation
reporting”. These have been omitted because they serve no purpose in the aim of this thesis.
Some of the pros and cons are listed below with this method [42].
Pros
43

Chapter 5. Method
• Testing is involved early, as early as in the requirement phase.
• Requirement change is possible at any stage
• Has all the advantages as compared to e.g. the Waterfall model
Cons
• With any change in the requirements, the testing and design documents needs to be
updated to meet the new requirements.
• Requires reviews at each stage, which is not efficient for small projects. However, this
part can be manipulated as done in this thesis and adapt to the appropriate scope.
5.1 Requirements and research
Based on the requirements, as stated in Section 1.2.1, of the system, a background study was
conducted where the possibility and alternatives of solutions were investigated. Also, since many
auto-mobile manufacturers have a product or service that can be compared to the diagnostics
system that is the aim of this thesis, it served a benefiting purpose investigating those solutions
and how the architecture of those systems looked like. Hence, inspiration and lessons could be
extracted from the previous implementations of the problem. This research can be found in
chapter 3.
5.2 Modelling and development
Once the requirements of the system where converged into a system specification document,
a general design of the architecture (see Section 1.3.1) and workflow of the solution could
be constructed. As the diagnostic system consists of three main parts, earlier mentioned as
observation, diagnostics and troubleshooting, these three sections is considered as the three
main subsystems of the design (see Section 1.3.1).
When prototyping and deploying subsystem tests, these three will be the systems in focus.
Although these are seen as separate subsystems, the interdependencies are clear and a thorough
subsystem integration test must be performed at each stage of the design and prototyping. This
is explained further in chapter 7.
In the actual development phase, the concept of rapid prototyping is applied. As the prototype
is subject for weekly evaluation at Scania together with the stakeholder of the project and
thesis, a new set of functionality is presented at each evaluation meeting. This means that
44

Chapter 5. Method
rapid prototyping is an efficient method as the iterative process converge the prototype to a
working system. The unit testing is also conducted in this phase, where each subsystem (see
Section 1.3.1) is tested separately with test data derived from the evaluation meeting, while
matching them to the user requirements (validation assessment).
5.3 Development framework
The development is conducted in the Java language in the Eclipse integrated development envi-
ronment (IDE). The reason for using Java is that the target environment for the prototype is
a common web browser. This means that the prototype will be a web application, hence it has
to be developed in a language that is translatable and understandable for a web browser. Java
allows for that translation via Google Web Toolkit (GWT). The tool compiles the Java source
code and outputs it as JavaScript, fully understandable and presentable for a web browser.
5.3.1 Google Web Toolkit
GWT allows for building and optimizing complex web-based applications, such as the proto-
type in this thesis. It’s open-source and completely free and with a large community using it
worldwide [43]. The GWT software development kit (SDK) provides a set of core Java applica-
tion programming interfaces (API) and so called Widgets. With these, the developer is allowed
to write asynchronous JavaScript and XML (AJAX) applications in Java and then compile the
source code into JavaScript, which is platform independent as it can run on all browsers, includ-
ing mobile browsers in Android and iOS. The workflow from Java source code to compilation
into JavaScript is shown in Figure 5.2.
One challenge when working with GWT and JavaScript is that the latter does not have support
for multiple threads. This means that in order to handle multiple tasks, asynchronous calls are
made which has an effect on performance and deadlines. As a consequence, hard deadlines are
not possible to achieve in a web application making asynchronous calls [44].
Although the system requirements does not entail or call for any hard deadlines (where timing of
events are safety critical [45]), this notion is useful to keep in mind during the development phase
as the performance will be affected heavily. Nevertheless, any request made server-side should
never take more time than what the user experiences as real time. This is verified throughout
the development phase, during the unit testing and at the weekly evaluation meetings.
45

Chapter 5. Method
Figure 5.2: The workflow from Java source code to a JavaScript web application via GWT.
5.4 Unit and integration testing
The unit and integration testing of the system is a major part of the development phase, as
the solution needs to be functional and realistic in its results in order to satisfy the goal of the
thesis. The testing can be done in either a black box or a white box setting [46]. For this thesis,
only a black box test setting is chosen as the relevant result is how the system behaves given
some inputs, not necessarily the path it takes. Black box testing is visualized in Figure 5.3
below.
46

Chapter 5. Method
Figure 5.3: General Classification of Test Techniques
For the black box testing, only three test configurations are considered. These are equivalent
partitioning, comparison testing and fuzz testing.
5.4.1 Equivalent partitioning
This configuration divides the input domain of an application into equivalence classes. This
means that it separates a set of valid and invalid states for given input conditions. In other
words:
• Given a range of the input condition - define one valid and two invalid states
• Given a value of the input condition - define one valid and two invalid states
Equivalent partitioning will be conducted in the unit testing (Bayesian model and troubleshoot-
ing algorithm).
5.4.2 Comparison testing
Generally, comparison testing is conducted in software development where reliability of software
is critical. The software engineering team develops several independent versions of the same
47

Chapter 5. Method
application and conducts test with the same data and verifies that the outcome is the same. In
this thesis, comparison testing will be used on the Bayesian network and the different versions
will be the target application of this thesis and GeNIe, a development environment for graphical
decision-theoretic models (i.e. Bayesian networks) [47].
5.4.3 Fuzz testing (or negative testing)
Fuzz testing, also known as negative testing, takes random values as inputs. This is done to test
the robustness of a system and will be used for both the unit testing and integration testing.
The main characteristics of fuzz testing, or fuzzing, is given below [48]:
• The input is random
• A criteria of reliability: if the application crashes or hangs during the fuzz testing - the
test case has failed
• Fuzz testing have the ability to be automated to a large extent
48

Chapter 6
Design and implementation
In this chapter, the implementation of the thesis work will be presented. Most of the work
have been focused on design of the different subsystems (see Section 1.3.1), and converging of
the same. The implementation phase was divided into several stages. Each stage defined a
certain subsystem. The derivation of the Bayesian network model was aided by the industrial
supervisor Jonas Biteus. Much work has also been put on investigating how to utilize the model
for the intended purpose.
6.1 Bayesian network system modeling
As mentioned in the introduction (see Section 1.3), a delimitation made for this thesis is that
the system should only consider the instrumental cluster (ICL) unit and hence the model should
be of the ICL-system. As the work is only intended to demonstrate the technology and what
can be done, the step towards a full vehicle system model is not far away. The application in
this thesis is fully scalable to any amount of ECU in one vehicle and also any amount of vehicles.
6.1.1 Model assumptions and delimitations
As the Bayesian model can expand rapidly when it comes to the complexity, there is a need to
simplify the model so that it fits the scope of this thesis. The model is, as mentioned, only on
the ICL-unit of the vehicle. It consists of a number of different node categories (all internally
defined, in the model they behave all the same). Some nodes acts only as connectors between
model-nodes, the purpose being to minimize the complexity of the model and hence enhancing
the performance of the Bayesian network model inference. The defined nodes are summarized
in Table 6.1.
49

Chapter 6. Design and implementation
Category Type Defined Possible fault states
Observation Visual Externally {Stuck high, Stuck low,
Stuck other, Normal,
Dirty, Cold, Hot, No
sweep, Still}Observation DTC Externally {Active, Passed}Breakable Component Externally {High, Excessive high,
Low, Obstructed, Cir-
cuit short to ground,
Circuit short to battery,
Circuit open, Electrical
fault, No fault, Faulty,
Stuck open, Stuck
closed, Stuck high,
Stuck low, Stuck}Breakable Other Externally {Same as above}
Connectors - Internally -
Table 6.1: The different type of nodes defined in the network
6.1.2 Model component variables
The component variables in the model are extracted during the diagnosis (diagnosis subsystem
described in Section 1.3.1) and examined. In the model, these are the cause nodes (see Table
6.1). For each set of evidence query on the model, all nodes update their probability distribution
accordingly. However, in the implementation, only the nodes defined (internally) as components
are extracted to find the component which causes the fault or error. The component variables in
the ICL model is given in Table 6.2 below. The component variables are defined as breakables
in the model, and divided into two subgroups. These are component and other. Components
are those which are replaceable with spare parts, i.e. actual physical components. Others are
the rest, i.e CAN buses, cables and hoses.
Each component have a cost of repair, where the cost of spare part and time to repair the
component is considered and a cost of observation, where the cost to inspect whether the
component is faulty or not is considered (i.e the time to observe the component).
50

Chapter 6. Design and implementation
Identifier Code Fault states Type
Coolant thermostat A11 {Stuck open, Stuck
closed}Component
EMS E44 {Electrical fault} Component
ICL O1 {Electrical fault} Component
Radiator fan A1 {Faulty} Component
Radiator and hoses A2 {Faulty} Component
Temperature sensors except coolant A4 {Faulty} Component
Coolant temperature circuit T33 {Faulty} Component
Engine coolant temperature sensor 30 {Circuit open, Circuit
short to ground, Stuck
high, Stuck low, Stuck}
Other
Engine coolant temperature sensor cables 31 {Circuit short to
ground, Circuit short to
battery, Circuit open}
Other
Yellow CAN bus 71 {Electrical fault} Other
Red CAN bus 50 {Electrical fault} Other
Table 6.2: The component variables in the network
51

Chapter 6. Design and implementation
6.1.3 Observation variables
The observations (observation subsystem described in Section 1.3.1), derived from the DTCs and
other perceived observations, are set as the symptom variables in the model. The observation
variables acts as the evidence set X as in definition 2.2. The observations are also categorized
into two subgroups, DTCs and visuals. See Table 6.3 below.
Identifier Code ECU Type
ICL temperature gauge sweep area 1 ICL Visual
ICL temperature gauge movement 2 ICL Visual
Fan rotation 3 EMS Visual
ICL temperature gauge active movement 5 ICL Visual
Engine temperature 7 EMS Visual
Communication with the coordinator (COO) 0303 ICL DTC
CAN communication, yellow CAN bus 0300 ICL DTC
Unknown D100 ICL DTC
Communication with the engine control unit (EMS) 0305 ICL DTC
Internal fault 0971 ICL DTC
Unknown 0256 ICL DTC
Internal fault 0972 ICL DTC
Internal fault 0973 ICL DTC
Internal software fault 9999 EMS DTC
Coolant temperature sensor 0115 EMS DTC
Coolant temperature sensor 1135 EMS DTC
Coolant temperature sensor 1 0118 EMS DTC
Coolant temperature sensor 1 0117 EMS DTC
Coolant temperature 1132 EMS DTC
Coolant temperature 1133 EMS DTC
Coolant temperature 0128 EMS DTC
Communication with the EMS control unit 0234 COO DTC
Yellow CAN bus 02A0 All DTC
Red CAN bus 029F All DTC
Red CAN bus 0255 All DTC
Table 6.3: The observation nodes in the network
52

Chapter 6. Design and implementation
6.1.4 A priori probabilities of components
Identifier Code Fault state Probability
Coolant thermostat A11 Stuck open 1× 10−8
Stuck closed 1× 10−8
EMS E44 Electrical fault 1× 10−8
ICL O1 Electrical fault 1× 10−7
Radiator fan A1 Faulty 1× 10−7
Radiator and hoses A2 Faulty 1× 10−7
Temperature sensors
except coolant
A4 Faulty 1× 10−8
Coolant temperature
circuit
T33 Faulty 1× 10−7
Engine coolant temper-
ature sensor
30 Circuit open 1× 10−7
Circuit short to ground 1× 10−7
Stuck high 1× 10−7
Stuck low 1× 10−7
Stuck 1× 10−7
Engine coolant temper-
ature sensor cables
31 Circuit short to ground 1× 10−7
Circuit short to battery 1× 10−8
Circuit open 1× 10−8
Yellow CAN bus 71 Electrical fault 1× 10−7
Red CAN bus 50 Electrical fault 1× 10−7
Table 6.4: The a priori probabilities for the components
The reason for such low a priori probabilities on the components are the lack of statistical data
that can serve to adjust the values to fit the statistics of the ECUs fault history. The power of
Bayesian network is still utilized in the structure of the network that is drawn and the casual
relationships between components. This describes how different components are affected by
each-other, as explained in Section 2.2.2.
53

Chapter 6. Design and implementation
6.2 Cost of observation and repair
As given by Equation 4.1, each component has two costs associated with it: the cost of ob-
servation Coi and the cost of repair Cr
i . These are static values, independent of the state of
the system. To achieve a successful troubleshooting result and have a cost-efficient action plan,
each component needs to be associated with both Coi and Cr
i . Also, when a faulty component
is discovered and repaired, the system is observed once more with the cost of Cp to determine
if the repair was successful or not. This is also considered a static value.
6.2.1 Cost of observation
The cost of observation entails the cost for observing a component. This is regarded as the
standard time to investigate a component (including dismounting / disassembling if necessary)
multiplied with the hourly rate of a mechanic – giving the total cost for a mechanic to observe
a component. The hourly rate is approximated to ∼150 SEK.
6.2.2 Cost of repair
The cost of repair is the cost for fully repairing / replacing the component (the lowest cost is
considered here), including the cost for spare parts and cost of mechanics and other personnel
(with the same calculation as the cost of observation). It should be noted that the standard
time for repair / replace is different than that of observation.
54

Chapter 6. Design and implementation
6.2.3 ICL component costs
In Table 6.5 below, the cost of observation and repair is presented.
Component Obs. cost (sek) Rep. cost (sek)
Coolant thermostat 105 365
EMS 205 2650
ICL 140 1950
Radiator fan 95 240
Radiator and hoses 125 230
Temperature sensors except coolant 110 315
Coolant temperature circuit 120 400
Engine coolant temperature sensor 120 375
Engine coolant temperature sensor cables 125 280
Yellow CAN bus 165 1300
Red CAN bus 165 1300
Table 6.5: The observation and repair cost for the components in the Bayesian model
6.3 Troubleshooting methods
The information from Section 6.2 above will determine in which order the troubleshooting will
occur. But as mentioned in Section 4.6, the tests must be taken into consideration in order to
minimize the cost and achieve an efficient troubleshooting process. These are given for the ICL,
but as mentioned earlier it’s difficult to separate the ICL entirely from other ECUs, why some
of the tests affect ECUs also.
6.3.1 Testing methods
The tests (also called methods) are presented below in Table 6.6.
55

Chapter 6. Design and implementation
Action Description Test cost (sek)
Swipe instrumental cluster Initiates a swipe of all gauges
in the ICL
100
Check coolant temperature sensor Check the function of the tem-
perature sensor with SDP3
and a multimeter
150
Check thermostat Check the function of the
thermostat in a vessel of boil-
ing water
105
Set temperature in EMS Manipulate the sensor value
for the temperature in the
EMS and check for response
50
Table 6.6: The tests for the instrumental cluster
6.3.2 Repair methods
When acquiring the action plan to repair or renew a component, a set of repair methods are
used. Again, it’s difficult to separate the ICL from the system as it’s interdependent with other
ECUs. Hence, the repair methods might not be directly connected to the ICL.
The repair methods are given in Table 6.7 below.
56

Chapter 6. Design and implementation
Action Type Description
Renew instrumental cluster Renew Schedules renewal of the in-
strument cluster to the next
workshop visit.
Renewal - Glass, instrumental cluster Renew Schedules renewal of the glass
panel of the instrument clus-
ter to the next workshop visit.
Renew coolant temperature sensor Renew Schedules renewal of the
coolant temperature sensor to
the next workshop visit.
Renew thermostat Renew Schedules replacement the
thermostat to the next
workshop visit.
Renew EMS Renew Schedules to the next work-
shop visit renewal and pro-
gramming of the EMS control
unit.
Renew Coordinator Unit (COO) Renew Schedules to the next work-
shop visit renewal and pro-
gramming of the COO control
unit.
Troubleshoot CAN system Repair Schedules to the next work-
shop visit troubleshooting of
the CAN system with SDP3.
Table 6.7: The repair methods for the instrumental cluster
57

Chapter 6. Design and implementation
6.4 The final Bayesian network model
The final model is given in Figure 6.1 below. It’s also given in Appendix A. The model consists
of component and observation nodes. The internal nodes (as described in Table 6.1.1) are given
a purple color in the model. The reason for them are to simplify the model and make it easier
to construct.
Figure 6.1: The Bayesian network model of the ICL
6.5 Troubleshooting algorithm
The troubleshooting algorithm used in this thesis is a so called one step look-ahead algorithm. It
incorporates the possibility to evaluate tests in the troubleshooting process using Equation 4.3.
For each action, the ECR is compared to the ECRT for all available tests to evaluate which
approach corresponds to the lowest estimated cost.
The comparison determines which action is best as the next step, hence the name one step
look-ahead, as it only sees one step ahead in time. A more complex troubleshooting algorithm
could be used, but as it’s sufficient to use a one step algorithm in this thesis it will not be the
case here. Tests provide information that can isolate a fault quicker and cheaper than only
calculating the ECR and basic TS-strategy. This is evaluated for every action, and for every
new set of evidence in the Bayesian network the ECR and ECRT are updated.
58

Chapter 6. Design and implementation
Figure 6.2: One step horizon troubleshooting flowchart
Noteworthy about the algorithm is that it’s biased towards how it sees the tests. After each
evaluation, it makes a decision whether it’s good or bad. It only cosiders to make the test now
or never. It does not comprise the idea of performing a test later in the process, which weakens
it’s efficiency by some degree [49].
59


Chapter 7
Results and verification
In this chapter, the results of the previous chapter (Chapter 6) will be presented. Furthermore, a
verification of the modelled system will be conducted to investigate how (or if ) the requirements
in Section 1.2.1 were fulfilled.
7.1 System integration
When referring to ”integration testing” in this chapter, the complete system where all three
subsystems (see Section 1.3.1) are integrated. The user interface is displayed in Figure 7.1.
which is considered the interface for the integrated system. The integrated system is named
Assitans+, as it’s considered an advancement from the current assistance service provided today.
For the diagnosis, three threshold values are considered. For components with a posterior prob-
ability of 0.7 or greater - the likelihood is set to most likely (red color). For 0.7 > a posterior >
0.1, the likelihood is set to less likely (orange color). For a posterior ≤ 0.1, the likelihood is set
to not likely (green color).
7.2 Verification
For unit (each subsystem is considered a ”unit”) and integration testing and verification, a
number of simulation where made of different user scenarios. These are described in the sections
below. The difference of verification and validation is sometimes difficult to distinguish. Below
is a description proposed by Wallace et. al [50]:
Validation: Are we building the right system?
Verification: Are we building the system right?
61

Chapter 7. Results and verification
Figure 7.1: The graphical user interface (GUI) of the diagnostics demonstrator
7.2.1 Equivalent partitioning
In Table 7.1 below are the chosen input conditions and the corresponding output states (valid
and invalid). The chosen inputs are based on an expected user scenario (given from weekly
meetings at Scania). The valid output (component) is expected to be faulty (either most likely
or less likely) given the input, and the invalid outputs are expected to be non-faulty given the
input. In this test case, three DTC inputs and one visual input are considered.
62

Chapter 7. Results and verification
Input (Code) Valid output (Code) Invalid outputs (Code) Classes covered
DTC (0234) Red CAN bus (50) ICL (O1) DTC (0303,
0305, 0255, 029F,
D100)
Radiator fan (A1)
DTC (0973) ICL (O1) Yellow CAN bus (71) DTC (0972, 0971)
Radiator fan (A1)
DTC (0128) Coolant temp. circuit (T33) ICL (O1) DTC (1133, 1132,
1135, 0115)
Radiator and hoses (A2)
Visual Temp.
gauge doesn’t
sweep (1)
ICL (O1) EMS (E44) Random
Temperature sensors (A4)
Table 7.1: Input conditions for equivalent partitioning with one valid and two invalid outputs.The test case was conducted on the integrated system.
The tests were conducted on the integrated system (user interface given in Figure 7.1) and an
example can be seen in Figure 7.2.
7.2.2 Comparison testing
For the comparison testing, the same input where used from Section 7.2.1. However, the com-
parison where made to the GeNIe outcome to see if the model and thesis application did give
the same result as the GeNIe application. The threshold values given in Section 7.1 are used
here also.
Input (Code) Target comp. (Code) Assistans+ output GeNIe
probabil-
ity
DTC (0234) Red CAN bus (50) Less likely 0.12
DTC (0973) ICL (O1) Most likely 1
DTC (0128) Coolant temp. circuit (T33) Most likely 0.7
Visual Temp.
gauge doesn’t
sweep (1)
ICL (O1) Most likely 0.85
Table 7.2: A comparison between Assistans+ and GeNIe outputs for a given set of inputs.
63

Chapter 7. Results and verification
Figure 7.2: The diagnosis, given fault code (DTC) 0234. The less likely components areunordered and as given and expected in Table 7.1, the Red CAN bus is indicating to be faulty.
The troubleshooting system in Assistans+ behaves well according to the expected values, how-
ever, this can’t be taken as if the model itself is a valid representation of the system. The
comparison test only compares between the two outputs, but puts no value on the validity of
the output result. To achieve this, the comparison must be made with a physical vehicle and
with the assistance of a skilled mechanic or domain expert.
7.2.3 Fuzz testing
The goal for the fuzz testing simulation was to see how the application and model would react
to random inputs. The thesis application was testes randomly, changing variables and inputs
to see how the application behaved. If it crashed or hanged, the test was considered a failure.
The outcome from the negative testing was only examined holistically as it was not possible to
analyse any expected output as this was random, given the input conditions.
64

Chapter 7. Results and verification
As a conclusion for the negative testing, it was found that the application froze when trying
to update the diagnosis with new inputs without allowing the application to update once for
each input. In other words, when forcing multiple inputs (observations) at the same time, the
application froze and had to be restarted. However, this is only a weakness in the framework
and environment the application runs in (mainly issues with JavaScript not being able to handle
multiple threads), and not a property of the model or troubleshooting algorithm. In principle,
this should not impose a problem for the application. The model itself handles multiple inputs
(evidences) very well, and when performing the same type of negative testing in GeNIe, the
failure is not reproduced.
65


Chapter 8
Conclusion
As a conclusion, it can be said that this thesis proved that troubleshooting of heavy vehicles
using Bayesian network models, and decision-theoretic algorithms, have a large potential and
should be investigated further in future research. The results were satisfactory and this is shown
by the test cases in Chapter 7. The limitations of the thesis implementation have already been
discussed, namely the lack of a completely correct Bayesian model and the use of a sub-optimal
troubleshooting algorithm (one step lookahead). These are recommended to be improved in
future work.
8.1 Discussion
In the implementation in this thesis of the troubleshooting application, the main areas for
improvements are the correctness of the Bayesian model, and a more complex troubleshooting
algorithm. However, since the purpose of this thesis was to demonstrate how an integrated
troubleshooting system that uses Bayesian network models for preparation of an action plan,
it’s natural that these were not as optimal as they could’ve been. The troubleshooting algorithm,
as mentioned earlier, only looked one step ahead in time and never considered the possibility
to conduct a test later in time. This limited the efficiency of the algorithm heavily, but the
efficiency was sufficient enough for the implementation in this thesis.
Since the troubleshooting algorithm depended heavily on the outcomes of the Bayesian network
model and its probability distribution, it’s concluded that for a successful troubleshooting (in
the sense of minimizing repair cost and minimize downtime of the vehicle), both the model and
algorithm need to be as optimal as possible. Hence, both are an area of focus for future work.
67

Chapter 8. Conclusion
8.1.1 Bayesian models
One of the main challenge for a successful model-based diagnostics is in the method for creating
the model. In this thesis the model was created manually and for the most part only via expert
knowledge of the modelled system. As Scania is known for their modularity structure and design
of their trucks [51], this means that for each modification of a truck - there needs to be a new
modified model. It’s not plausible to create the models manually if this was to be implemented
on all trucks and versions. Hence, automated methods for creating Bayesian networks is called
for, and future work should focus on this issue. Also, for a more accurate model, statistical
fault data should be used in a larger extent than it has been in this thesis.
Moreover, the use of maximum-likelihood estimation [52] gives the possibility to create (or teach)
a network structure from sets of data and prior information. Hence, there exists a possibility
to automate the creation of the Bayesian networks. This can be applied for:
• Network structure is specified & Data does not contain missing values
• Network structure is not specified & Data does not contain missing values
• Network structure is specified & Data does contain missing values
• Network structure is not specified & Data does contain missing values
8.2 Future work
For future work the author recommends to focus on the creation of accurate models. The
troubleshooting process will only be as accurate as the underlying model. Here, a wider usage
of statistical data from the error logs can be used as a ”teacher” of the models.
Also, an important aspect is the automation in model creation. As mentioned, Scanias mod-
ularity design calls for a new model for each alteration of a truck, why it’s not plausible to
acquire models manually and by hand.
As far as the question about using alternative learning models, such as neural networks, instead
of Bayesian networks, there are both pros and cons with such an approach. As investigated
already by Scania [13][11](among others), Bayesian methods are suitable for this task as the sys-
tems modelled are (mostly) non-deterministic. Hence, Bayesian networks provide well grounded
support, because of its statistical nature. However, given sufficient amount of learning data,
neural networks might prove to be the better case. But it all depends on the amount and quality
of the learning data provided to the network. Bayesian network overcomes this dependency by
incorporating domain expert knowledge.
68

Chapter 8. Conclusion
8.2.1 Linking to previous research
During the last couple of years, a lot of research have been conducted on the use of decision-
theoretic methods and Bayesian networks for troubleshooting vehicles. Even in the pre-study
some thesis work (majority from KTH) was found on the matter [13][11][53]. What this thesis
brings to the table is the comprehensiveness of all the different field and merging them into a
single system to truly demonstrate the power of guided troubleshooting and diagnostics.
69


Appendix A
Bayesian network model of the ICL
71

Appendix A. Bayesian network model of the ICL
FigureA.1:
Th
eB
ayesian
netw
ork
mod
elof
the
ICL
72

Bibliography
[1] D. Heckerman. A tutorial on learning with Bayesian Networks. 1995.
[2] Volvo Trucks US. Remote diagnostics - real diagnostics. real people. real
time., 2013. URL http://www.volvotrucks.com/trucks/na/en-us/business_tools/
connectedvehicleservices/Pages/default.aspx.
[3] Nils J. Nilsson. Introduction to Machine Learning. 1998.
[4] Wikipedia. Artificial neural networks, March 2013. URL http://en.wikibooks.org/
wiki/Artificial_Neural_Networks.
[5] D. Heckerman and J. Breese. Decision-theoretic case-based reasoning. page 838, 1996.
[6] G. Welch and G. Bishop. An introduction to the kalman filter. Technical report, University
of North Carolina at Chapel Hill, 2006.
[7] M. L. Schwall and J. C. Gerdes. A probabilistic approach to residual processing for vehicle
fault detection. American Control Conference, 3:2552–2557, 2002.
[8] J. Breese D. Heckerman and K. Rommelse. Decision-theoretic troubleshooting. pages 1–15,
1996.
[9] Amir. V-model, June 2013. URL http://www.testingexcellence.com/v-model/.
[10] B. Selic. The pragmatics of model-driven development. IEEE, 20:19–25, Sept.-Oct. 2003.
[11] Alexander Cyon. Modeling of fuel injection system for troubleshooting. Master’s thesis,
Royal Institute of Technology, 2012.
[12] Julio C. Ramirez and Antonio S. Piqueras. Learning bayesian networks for systems diag-
nosis. Robotics and Automotive Mechanics Conference, 2006.
[13] Thomas Gustavsson. Troubleshooting using cost effective algorithms and bayesian net-
works. Master’s thesis, Royal Institute of Technology, 2006.
[14] Hkan Warnquist. Computer-Assisted Troubleshooting for Efficient Off-board Diagnosis.
PhD thesis, Linkpings universitet, 2011.
73

Bibliography
[15] Chien C. Lee. Fuzzy logic in control systems: Fuzzy logic controller - part 1. IEEE
Transactions on systems, Man and Cybernetics, 20:404, 1990.
[16] Lotfi A. Zadeh. Is there a need for fuzzy logic? Information Sciences - An international
journal, (178):2751–2779, Februari 2008.
[17] Q. Yang J. Li and B. Yang. Dempster-Shafer Theory Is A Special Case of Vague Sets
Theory, 2004.
[18] Wikipedia. Dempster-shafer theory, 2013. URL http://en.wikipedia.org/wiki/
Dempster%E2%80%93Shafer_theory.
[19] C. Stergiou and D. Siganos. Neural networks, May 2013. URL http://bit.ly/2AeP0i.
[20] Joao F. G. de Freitas. Bayesian methods for neural networks.
[21] J. Breese M. Henrion and E. Horvitz. Decision analysis and expert systems. Al Magazine,
1991.
[22] B. Middleton M. Pradhan, G. Provan and M. Henrion. Knowledge engineering for large
belief networks. Uncertainty in Artificial Intelligence: Proceedings of the Tenth Conference,
1994.
[23] K. Laskey and S. Mahoney. Network fragments: Representing knowledge for construting
probabilistic models. Uncertainty in Artificial Intelligence: Proceedings of the Thirteenth
Conference, 1997.
[24] I. Nachman N. Friedman, M.Linial and D. Pe’er. Using bayesian networks to analyze
expression data. Journal of Computational Biology, 77:601–620, 2000.
[25] F. Faltin F. Ruggeri and R. Kenett. Bayesian networks. Encyclopedia of Statistics in
Quality and Relaiability, 2007.
[26] H. Li and Y. Zhou. Fault diagnosis by bayesian network insystem of poor braking effi-
ciency. 4th International Conference on Intelligent Human-Machine Systems and Cyber-
netics, page 45, 2012.
[27] Jun Shao. Lectures from: STAT709 Mathematical Statistics. University of Wisconsin-
Madison, 2011.
[28] Q. Shen R. Daly and S. Aitken. Learning bayesian networks: approaches and issues. The
Knowledge Engineering Review, 26:99–157, 2011.
[29] T. D. Nielsen and F. V. Jensen. Bayesian Networks and Decision Graphs. Springer, second
edition, February 2007.
[30] U. Kjaerulff and A. Madsen. Probabilistic Networks An Introduction to Bayesian Networks
and Influence Diagrams. 2005.
74

Bibliography
[31] Ramsey Faragher. Understanding the basis of the kalman filter via a simple and intuitive
derivation. IEEE Signal Processing Magazine, 2012.
[32] M. I. Ribeiro and P. Lima. Introduction to kalman filtering. Technical report, Intituto
Superior Technico, 2008.
[33] K. W. Przytula and D. Thompson. Construction of bayesian networks for diagnostics.
Aerospace Conference Proceedings, IEEE, 5:193–200, Mars 2000.
[34] Z. Qi and L. Yi. Improved bayesian network in steam turbine fault diagnosis. Industrial
Mechatronics and Automation (ICIMA), pages 465–468, May 2010.
[35] S. Venkatesh M. Hunt, B. von Konsky and P. Petros. Bayesian networks and decision
trees in the diagnosis of female urinary incontinence. Engineering in Medicine and Biology
Society, 1:551–554, June 2000.
[36] J.R. Clarke O. Ogunyemi and B. Webber. Using bayesian networks for diagnostic reasoning
in penetrating injury assessment. Computer-Based Medical Systems, pages 115–120, June
2000.
[37] R. Barco S. Munagala, L. Moltsen and P. Lazaro. Automated troubleshooting of satellite
communication ground equipment. Aerospace Conference, pages 1–10, March 2008.
[38] Wikipedia. Decision theory, 2013. URL http://en.wikipedia.org/wiki/Decision_
theory.
[39] H. Raiffa. Decision Analysis: Introductory Lectures on Choice Under Uncertainty. Addison-
Wesley, 1968.
[40] L. Rokach and O. Maimon. Data mining and knowledge discovery handbook. 2010.
[41] T. Dean C. Boutilier and S. Hanks. Decision-theoretic planning: Structural assumptions
and computational leverage. Journal of Artificial Intelligence Research, 11:1–94, 1999.
[42] S. Balaji and Dr. M. Sundarajan Murugaiyan. Waterfall vs v-model vs agile: A comparative
study on sdlc. International Journal of Information Technology and Business Management,
2:28, 2012.
[43] Google Webkit Tool. Gwt project, 2013. URL http://www.gwtproject.org/overview.
html.
[44] Antonio G. Hernndez and Mara N. M. Garca. A javascript rdf store and application library
for linked data client application. Technical report, Universidad de Salamanca, 2011.
[45] J. Lee and N. Jindal. Asymptotically optimal policies for hard-deadline scheduling over
fading channels. IEEE Transactions on Information Theory, 2009.
75

Bibliography
[46] I. Jovanovic. Software testing methods and techniques. pages 30–41, 2008.
[47] University of Pittsburgh. Genie and smile, 1998. URL http://genie.sis.pitt.edu/.
[48] University of Wisconsin. Fuzz testing of application reliability, 2008. URL http://pages.
cs.wisc.edu/~bart/fuzz/fuzz.html.
[49] B. Kristiansen F. V. Jensen, U. Kjaerulff et. al. The sacso methodology for troubleshooting
complex systems. Hewlett-Packard Laboratory for Normative Systems, 2000.
[50] D. R. Wallace and R. U. Fujii. Software verification and validation: Its role in computer
assurance and its relationship with software project management standards. NIST Special
Publication, 1990.
[51] Scania. Easier customisation with scania’s modular system, 2013. URL http://www.
scania.com/media/feature-stories/general/module-system.aspx.
[52] Stanford University. Lectures on statistical inference. 2013.
[53] Joakim Fenn. Fault code positioning. Master’s thesis, Uppsala Universitet, 2011.
76