Embed Size (px)
Citation preview

1
TT Liu, BE280A, UCSD Fall 2006
Bioengineering 280APrinciples of Biomedical Imaging
Fall Quarter 2006X-Rays/CT Lecture 4
TT Liu, BE280A, UCSD Fall 2006
Topics
• Review Signal Expansions, Impulse Response andLinearity
• Superposition• Space Invariance• Convolution• Start Computed Tomography

2
TT Liu, BE280A, UCSD Fall 2006
Discrete Signal Expansion
!
g[n] = g[k]"[n # k]k=#$
$
%
g[m,n] =l=#$
$
% g[k,l]"[m # k,n # l]k=#$
$
%
n
δ[n]
n
1.5δ[n-2]
0
n
-δ[n-1]
0
0
n
g[n]
n
TT Liu, BE280A, UCSD Fall 2006
Image Decomposition
!
g[m,n] = a"[m,n]+ b"[m,n #1]+ c"[m #1,n]+ d"[m #1,n #1]
= g[k, l]l= 0
1
$k= 0
1
$ "[m # k,n # l]
c d
ba 0 010
=
+
+
+
c d
a b
1 000
0 100
0 001

3
TT Liu, BE280A, UCSD Fall 2006
Representation of 1D Function
!
From the sifting property, we can write a 1D function as
g(x) = g(")#(x $")d" .$%
%
& To gain intuition, consider the approximation
g(x) ' g(n(x)1
(x)
x $ n(x
(x
*
+ ,
-
. /
n=$%
%
0 (x.
g(x)
TT Liu, BE280A, UCSD Fall 2006
Representation of 2D Function
!
Similarly, we can write a 2D function as
g(x,y) = g(",#)$(x %",y %#)d"d#.%&
&
'%&
&
'
To gain intuition, consider the approximation
g(x,y) ( g(n)x,m)y)1
)x*
x % n)x
)x
+
, -
.
/ 0
n=%&
&
11
)y*
y %m)y
)y
+
, -
.
/ 0 )x)y
m=%&
&
1 .

4
TT Liu, BE280A, UCSD Fall 2006
Impulse Response
!
The impulse response characterizes the response of a system over all space to a
Dirac delta impulse function at a certain location.
h(x2;") = L # x1 $"( )[ ] 1D Impulse Response
h[m',k] = L #[m $ k][ ]
h(x2,y2;",%) = L # x1 $",y1 $%( )[ ] 2D Impulse Response
h[m',n';k, l] = L #[m $ k,n $ l][ ]
x1
y1
x2
y2
!
h(x2,y
2;",#)
!
Impulse at ",#
TT Liu, BE280A, UCSD Fall 2006
LinearityA system R is linear if for two inputs I1(x,y) and I2(x,y) with outputs
R(I1(x,y))=K1(x,y) and R(I2(x,y))=K2(x,y)
the response to the weighted sum of inputs is theweighted sum of outputs:
R(a1I1(x,y)+ a2I 2(x,y))=a1K1(x,y)+ a2K2(x,y)

5
TT Liu, BE280A, UCSD Fall 2006
Superposition
!
g[m] = g[0]"[m]+ g[1]"[m #1]+ g[2]"[m # 2]
h[m',k] = L["[m # k]]
y[m'] = L g[m][ ]
= L g[0]"[m]+ g[1]"[m #1]+ g[2]"[m # 2][ ]
= L g[0]"[m][ ] + L g[1]"[m #1][ ] + L g[2]"[m # 2][ ]
= g[0]L "[m][ ] + g[1]L "[m #1][ ] + g[2]L "[m # 2][ ]
= g[0]h[m',0]+ g[1]h[m',1]+ g[2]h[m',2]
= g[k]h[m',k]k= 0
2
$
TT Liu, BE280A, UCSD Fall 2006
Superposition Integral
!
What is the response to an arbitrary function g(x1,y1)?
Write g(x1,y1) = g(",#)$(x1-%
%
&-%
%
& '",y1 '#)d"d#.
The response is given by
I(x2,y2) = L g1(x1,y1)[ ]
= L g(",#)$(x1-%
%
&-%
%
& '",y1 '#)d"d#[ ] = g(",#)L $(x1 '",y1 '#)[ ]
-%
%
&-%
%
& d"d#
= g(",#)h(x2,y2;",#)-%
%
&-%
%
& d"d#

6
TT Liu, BE280A, UCSD Fall 2006
Pinhole Magnification Example
η
η
a b
ba
-
!
In this example, an impulse at ",#( ) will yield an impulse
at m",m#( ) where m = $b /a.
Thus, h x2,y2;",#( ) = L % x1 $",y1 $#( )[ ] = %(x2 $m",y2 $m#).
TT Liu, BE280A, UCSD Fall 2006
Pinhole Magnification Example
!
I(x2,y
2) = g(",#)h(x
2,y
2;",#)
-$
$
%-$
$
% d"d#
= C g(",#)&(x2'm",y
2'm#)
-$
$
%-$
$
% d"d#
I(x2,y2)
g(x1,y1)

7
TT Liu, BE280A, UCSD Fall 2006
Space Invariance
!
If a system is space invariant, the impulse response depends only
on the difference between the output coordinates and the position of
the impulse and is given by h(x2,y2;",#) = h x2 $",y2 $#( )
TT Liu, BE280A, UCSD Fall 2006
Pinhole Magnification Example
η
η
a b
ba
-
!
h x2,y2;",#( ) = C$(x2 %m",y2 %m#) .
Is this system space invariant?

8
TT Liu, BE280A, UCSD Fall 2006
Pinhole Magnification Example____, the pinhole system ____ space invariant.
TT Liu, BE280A, UCSD Fall 2006
Convolution
!
g[m] = g[0]"[m]+ g[1]"[m #1]+ g[2]"[m # 2]
h[m',k] = L["[m # k]] = h[m # k]
y[m'] = L g[m][ ]
= L g[0]"[m]+ g[1]"[m #1]+ g[2]"[m # 2][ ]
= L g[0]"[m][ ] + L g[1]"[m #1][ ] + L g[2]"[m # 2][ ]
= g[0]L "[m][ ] + g[1]L "[m #1][ ] + g[2]L "[m # 2][ ]
= g[0]h[m'#0]+ g[1]h[m'#1]+ g[2]h[m'#2]
= g[k]h[m'#k]k= 0
2
$

9
TT Liu, BE280A, UCSD Fall 2006
1D Convolution
!
I(x) = g(")h(x;")d"-#
#
$
= g(")h(x %")-#
#
$ d"
= g(x)& h(x)
Useful fact:
!
g(x)"#(x $%) = g(&)#(x $% $&)-'
'
( d&
= g(x $%)
TT Liu, BE280A, UCSD Fall 2006
2D Convolution
!
I(x2,y
2) = g(",#)h(x
2,y
2;",#)
-$
$
%-$
$
% d"d#
= g(",#)h(x2&",y
2&#)
-$
$
%-$
$
% d"d#
= g(x2,y
2) **h(x
2,y
2)
For a space invariant linear system, the superpositionintegral becomes a convolution integral.
where ** denotes 2D convolution. This will sometimes beabbreviated as *, e.g. I(x2, y2)= g(x2, y2)*h(x2, y2).

10
TT Liu, BE280A, UCSD Fall 2006
Rectangle Function
!
"(x) =0 x >1/2
1 x #1/2
$ % &
-1/2 1/2
1
-1/2 1/2
1/2
x
-1/2
x
yAlso called rect(x)
!
"(x,y) = "(x)"(y)
TT Liu, BE280A, UCSD Fall 2006
2D Convolution Example
-1/2 12x
y
h(x)=rect(x,y)
y
x
g(x)= δ(x+1/2,y) + δ(x,y)
xI(x,y)=g(x)**h(x,y)

11
TT Liu, BE280A, UCSD Fall 2006
2D Convolution Example
TT Liu, BE280A, UCSD Fall 2006
Image of a point object
!
Id (x,y) = limm"0
ks(x /m,y /m)
= #(x,y)
s(x,y)
s(x,y)
!
Id (x,y) = s(x,y)
m=1
!
Id (x,y) =1
m2s(x /m,y /m)In general,

12
TT Liu, BE280A, UCSD Fall 2006
Pinhole Magnification Example
!
I(x2,y2) = s(",#)h(x2,y2;",#)-$
$
%-$
$
% d"d#
= s(",#)&(x2 'm",y2 'm#)-$
$
%-$
$
% d"d#
after substituting ( " = m" and ( # = m#, we obtain
=1
m2
s( ( " /m, ( # /m)&(x2 ' ( " ,y2 ' ( # )-$
$
%-$
$
% d ( " d ( #
=1
m2s(x2 /m,y2 /m)))& x2,y2( )
=1
m2s(x2 /m,y2 /m)
TT Liu, BE280A, UCSD Fall 2006
Magnification of Object
!
M(z) =d
z
=Source to Image Distance (SID)
Source to Object Distance (SOD)
Bushberg et al 2001
zd

13
TT Liu, BE280A, UCSD Fall 2006
Image of arbitrary object
!
limm"0
Id (x,y) = t(x,y)
s(x,y)
s(x,y)
!
Id (x,y) = ???
m=1
!
Id (x,y) =1
m2s(x /m,y /m) **t(x /M,y /M)
t(x,y)
t(x,y)
Note: we are ignoring obliquity, etc.
TT Liu, BE280A, UCSD Fall 2006
X-Ray Image Equation
!
I(x2,y2) = s(",#)h(x2,y2;",#)-$
$
%-$
$
% d"d#
= s(",#)tx2 &m"
M,y2 &m#
M
'
( )
*
+ ,
-$
$
%-$
$
% d"d#
after substituting - " = m" and - # = m#, we obtain
=1
m2
s( - " /m, - # /m)tx2 & - "
M,y2 & - #
M
'
( )
*
+ ,
-$
$
%-$
$
% d - " d - #
=1
m2s(x2 /m,y2 /m)..t x2 /M,y2 /M( )
Note: we have ignored obliquity factors etc.

14
TT Liu, BE280A, UCSD Fall 2006 Macovski 1983
TT Liu, BE280A, UCSD Fall 2006
Summary1. The response to a linear system can be
characterized by a spatially varying impulseresponse and the application of the superpositionintegral.
2. A shift invariant linear system can becharacterized by its impulse response and theapplication of a convolution integral.
3. Dirac delta functions are generalized functions.

15
TT Liu, BE280A, UCSD Fall 2006
Computed Tomography
Suetens 2002
TT Liu, BE280A, UCSD Fall 2006
Computed Tomography
Suetens 2002
ParallelBeam
Fan Beam

16
TT Liu, BE280A, UCSD Fall 2006
Computed Tomography
Suetens 2002
TT Liu, BE280A, UCSD Fall 2006
Computed Tomography
Suetens 2002

17
TT Liu, BE280A, UCSD Fall 2006
Computed Tomography
Suetens 2002
TT Liu, BE280A, UCSD Fall 2006
CT Line Integral
!
Id = S0 E( )E0
Emax" exp # µ s; $ E ( )0
d
" ds( )dE
Monoenergetic Approximation
Id = I0 exp # µ s;E ( )0
d
" ds( )
gd = #logId
I0
%
& '
(
) *
= µ s;E ( )0
d
" ds

18
TT Liu, BE280A, UCSD Fall 2006
CT Number
!
CT_number = µ "µ
water
µwater
#1000
Measured in Hounsfield Units (HU)
Air: -1000 HUSoft Tissue: -100 to 60 HUCortical Bones: 250 to 1000 HUMetal and Contrast Agents: > 2000 HU
TT Liu, BE280A, UCSD Fall 2006
CT Display
Suetens 2002

19
TT Liu, BE280A, UCSD Fall 2006
Direct Inverse Approach
µ4µ3
µ2µ1 p1
p2
p3 p4
p1= µ1+ µ2p2= µ3+ µ4p3= µ1+ µ3p4= µ2+ µ4
4 equations, 4 unknowns. Are these the correct equations to use? !
p1
p2
p3
p4
"
#
$ $ $ $
%
&
' ' ' '
=
1 1 0 0
0 0 1 1
1 0 1 0
0 1 0 1
"
#
$ $ $ $
%
&
' ' ' '
µ1
µ2
µ3
µ4
"
#
$ $ $ $
%
&
' ' ' '
No, equations are not linearly independent.p4= p1+ p2- p3Matrix is not full rank.
TT Liu, BE280A, UCSD Fall 2006
Direct Inverse Approach
µ4µ3
µ2µ1 p1
p2
p3 p4
p1= µ1+ µ2p2= µ3+ µ4p3= µ1+ µ3p4= µ2+ µ4
4 equations, 4 unknowns. Are these the correct equations to use? !
p1
p2
p3
p4
"
#
$ $ $ $
%
&
' ' ' '
=
1 1 0 0
0 0 1 1
1 0 1 0
0 1 0 1
"
#
$ $ $ $
%
&
' ' ' '
µ1
µ2
µ3
µ4
"
#
$ $ $ $
%
&
' ' ' '
No, equations are not linearly independent.p4= p1+ p2- p3Matrix is not full rank.

20
TT Liu, BE280A, UCSD Fall 2006
Direct Inverse Approach
µ4µ3
µ2µ1 p1
p2
p3 p4
p1= µ1+ µ2p2= µ3+ µ4p3= µ1+ µ3p5= µ1+ µ4
4 equations, 4 unknowns. These are linearly independent now.In general for a NxN image, N2 unknowns, N2 equations.This requires the inversion of a N2xN2 matrixFor a high-resolution 512x512 image, N2=262144 equations.Requires inversion of a 262144x262144 matrix! Inversion process sensitive to measurement errors.
!
p1
p2
p3
p5
"
#
$ $ $ $
%
&
' ' ' '
=
1 1 0 0
0 0 1 1
1 0 1 0
1 0 0 1
"
#
$ $ $ $
%
&
' ' ' '
µ1
µ2
µ3
µ4
"
#
$ $ $ $
%
&
' ' ' '
p5
TT Liu, BE280A, UCSD Fall 2006
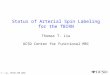
Iterative Inverse ApproachAlgebraic Reconstruction Technique (ART)
43
21 3
7
4 6 5
2.52.5
2.52.5 5
5
3.53.5
1.51.5 3
7
5 5
43
21 3
7
5 5

21
TT Liu, BE280A, UCSD Fall 2006
Backprojection
Suetens 2002
000030000 0
3
0
30303
000111000
100121001
110131011
111141111
TT Liu, BE280A, UCSD Fall 2006
In-Class Exercise
Suetens 2002
µ4µ3
µ2µ1 5.7
11.3
8.2 8.8 10.1

22
TT Liu, BE280A, UCSD Fall 2006
Projections
Suetens 2002
!
r
s
"
# $ %
& ' =
cos( sin(
)sin( cos(
"
# $
%
& ' x
y
"
# $ %
& '
x
y
"
# $ %
& ' =
cos( )sin(
sin( cos(
"
# $
%
& ' r
s
"
# $ %
& '
TT Liu, BE280A, UCSD Fall 2006
Projections
Suetens 2002
!
I" (r) = I0 exp # µ(x,y)dsLr ,"$%
& ' (
) *
= I0 exp # µ(rcos" # ssin",rsin" + scos")dsLr ,"$%
& ' (
) *

23
TT Liu, BE280A, UCSD Fall 2006
Projections
Suetens 2002
!
I" (r) = I0 exp # µ(rcos" # ssin",rsin" + scos")dsLr ,"$%
& ' (
) *
!
p" (r) = #lnI" (r)
I0
= µ(rcos" # ssin",rsin" + scos")dsLr ,"$
Sinogram
TT Liu, BE280A, UCSD Fall 2006
Sinogram
Suetens 2002

24
TT Liu, BE280A, UCSD Fall 2006
Backprojection
Suetens 2002
!
b(x,y) = B p r,"( ){ }
= p(x cos" + y sin",")d"0
#
$
x
y
!
b(x0,y) = p r," = 0( )#"
= p(x0)#"
x0
r
TT Liu, BE280A, UCSD Fall 2006
Backprojection
Suetens 2002
!
b(x,y) = B p r,"( ){ }
= p(x cos" + y sin",")d"0
#
$

25
TT Liu, BE280A, UCSD Fall 2006
Backprojection
Suetens 2002!
b(x,y) = B p r,"( ){ } = p(x cos" + y sin",")d"0
#
$