Embed Size (px)
Citation preview
Benders Decomposition for Solving Two-stageStochastic Optimization Models
IMA New Directions Short Course on Mathematical Optimization
Jim Luedtke
Department of Industrial and Systems EngineeringUniversity of Wisconsin-Madison
August 9, 2016
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 1 / 33
Basic Benders
Review – Two-Stage Stochastic LP with Recourse
zSP = min c>x+∑S
s=1 psQs(x)
s.t. Ax ≥ bx ∈ Rn1
+
where for s = 1, . . . , S
Qs(x)def= Q(x, ξs) = min q>s y
s.t. Wsy = hs − Tsxy ∈ Rn2
+
How to solve this problem?
Yesterday: Deterministic equivalent form ⇒ Large-scale LP
Today: Benders decomposition ⇒ Exploit structure
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 3 / 33
Basic Benders
Common Assumption
Relatively Complete Recourse
For every feasible first-stage feasible solution (Ax ≥ b, x ∈ Rn1+ ) and
every scenario s there exists a feasible recourse decision ys (Wsys =hs − Tsx, ys ∈ Rn2
+ ).
Simplifies Benders decomposition algorithm
We’ll first present the algorithm under this assumption
Then relax the assumption
Assumption is very important when using sample average approximation
Relatively complete recourse should hold for all possible realizations ofrandom outcomes
Otherwise, solution to SAA problem may not even be feasible tooriginal problem
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 4 / 33
Basic Benders
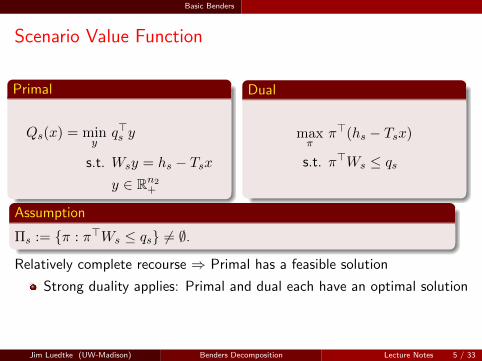
Scenario Value Function
Primal
Qs(x) = miny
q>s y
s.t. Wsy = hs − Tsxy ∈ Rn2
+
Dual
maxπ
π>(hs − Tsx)
s.t. π>Ws ≤ qs
Assumption
Πs := π : π>Ws ≤ qs 6= ∅.
If this assumption is violated:
⇒ For every x, second-stage primal problem is either infeasible orunbounded
⇒ Stochastic LP is either infeasible or unbounded
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 5 / 33
Basic Benders
Scenario Value Function
Primal
Qs(x) = miny
q>s y
s.t. Wsy = hs − Tsxy ∈ Rn2
+
Dual
maxπ
π>(hs − Tsx)
s.t. π>Ws ≤ qs
Assumption
Πs := π : π>Ws ≤ qs 6= ∅.
Relatively complete recourse ⇒ Primal has a feasible solution
Strong duality applies: Primal and dual each have an optimal solution
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 5 / 33
Basic Benders
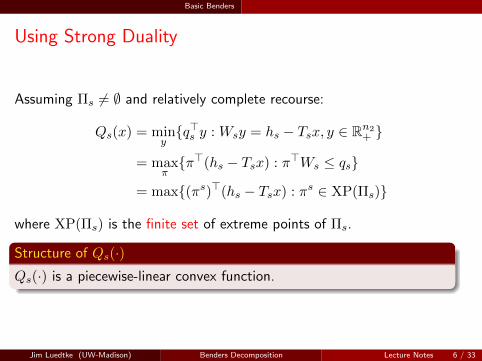
Using Strong Duality
Assuming Πs 6= ∅ and relatively complete recourse:
Qs(x) = minyq>s y : Wsy = hs − Tsx, y ∈ Rn2
+
= maxππ>(hs − Tsx) : π>Ws ≤ qs
= max(πs)>(hs − Tsx) : πs ∈ XP(Πs)
where XP(Πs) is the finite set of extreme points of Πs.
Structure of Qs(·)Qs(·) is a piecewise-linear convex function.
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 6 / 33
Basic Benders
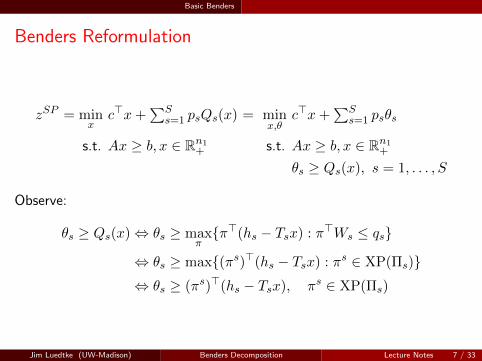
Benders Reformulation
zSP = minx
c>x+∑S
s=1 psQs(x) = minx,θ
c>x+∑S
s=1 psθs
s.t. Ax ≥ b, x ∈ Rn1+ s.t. Ax ≥ b, x ∈ Rn1
+
θs ≥ Qs(x), s = 1, . . . , S
Observe:
θs ≥ Qs(x)⇔ θs ≥ maxππ>(hs − Tsx) : π>Ws ≤ qs
⇔ θs ≥ max(πs)>(hs − Tsx) : πs ∈ XP(Πs)⇔ θs ≥ (πs)>(hs − Tsx), πs ∈ XP(Πs)
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 7 / 33
Basic Benders
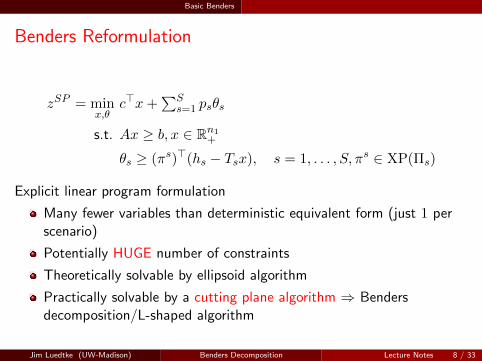
Benders Reformulation
zSP = minx,θ
c>x+∑S
s=1 psθs
s.t. Ax ≥ b, x ∈ Rn1+
θs ≥ (πs)>(hs − Tsx), s = 1, . . . , S, πs ∈ XP(Πs)
Explicit linear program formulation
Many fewer variables than deterministic equivalent form (just 1 perscenario)
Potentially HUGE number of constraints
Theoretically solvable by ellipsoid algorithm
Practically solvable by a cutting plane algorithm ⇒ Bendersdecomposition/L-shaped algorithm
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 8 / 33
Basic Benders
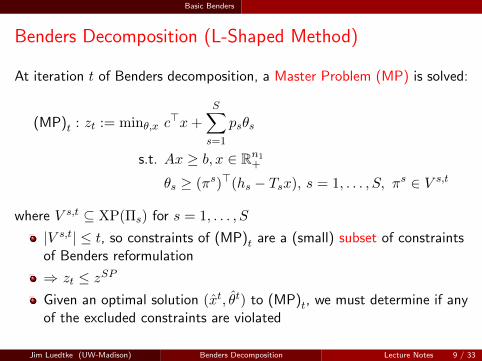
Benders Decomposition (L-Shaped Method)
At iteration t of Benders decomposition, a Master Problem (MP) is solved:
(MP)t : zt := minθ,x c>x+
S∑s=1
psθs
s.t. Ax ≥ b, x ∈ Rn1+
θs ≥ (πs)>(hs − Tsx), s = 1, . . . , S, πs ∈ V s,t
where V s,t ⊆ XP(Πs) for s = 1, . . . , S
|V s,t| ≤ t, so constraints of (MP)t are a (small) subset of constraintsof Benders reformulation
⇒ zt ≤ zSP
Given an optimal solution (xt, θt) to (MP)t, we must determine if anyof the excluded constraints are violated
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 9 / 33
Basic Benders
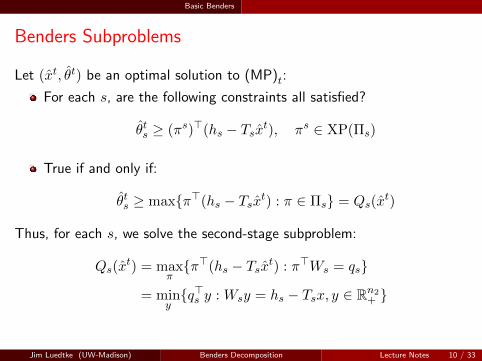
Benders Subproblems
Let (xt, θt) be an optimal solution to (MP)t:
For each s, are the following constraints all satisfied?
θts ≥ (πs)>(hs − Tsxt), πs ∈ XP(Πs)
True if and only if:
θts ≥ maxπ>(hs − Tsxt) : π ∈ Πs = Qs(xt)
Thus, for each s, we solve the second-stage subproblem:
Qs(xt) = max
ππ>(hs − Tsxt) : π>Ws = qs
= minyq>s y : Wsy = hs − Tsx, y ∈ Rn2
+
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 10 / 33
Basic Benders
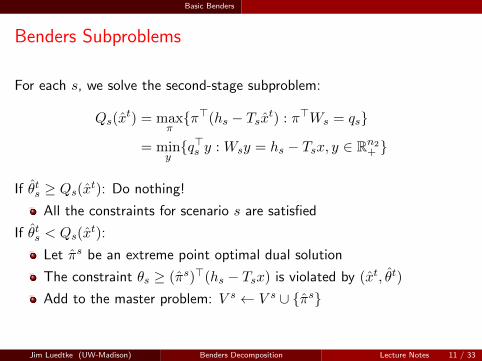
Benders Subproblems
For each s, we solve the second-stage subproblem:
Qs(xt) = max
ππ>(hs − Tsxt) : π>Ws = qs
= minyq>s y : Wsy = hs − Tsx, y ∈ Rn2
+
If θts ≥ Qs(xt): Do nothing!
All the constraints for scenario s are satisfied
If θts < Qs(xt):
Let πs be an extreme point optimal dual solution
The constraint θs ≥ (πs)>(hs − Tsx) is violated by (xt, θt)
Add to the master problem: V s ← V s ∪ πs
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 11 / 33
Basic Benders
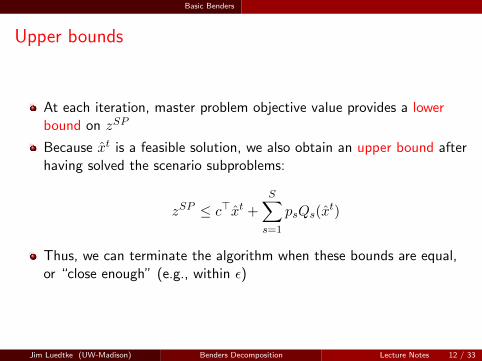
Upper bounds
At each iteration, master problem objective value provides a lowerbound on zSP
Because xt is a feasible solution, we also obtain an upper bound afterhaving solved the scenario subproblems:
zSP ≤ c>xt +
S∑s=1
psQs(xt)
Thus, we can terminate the algorithm when these bounds are equal,or “close enough” (e.g., within ε)
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 12 / 33
Basic Benders
Recap: Benders Decomposition
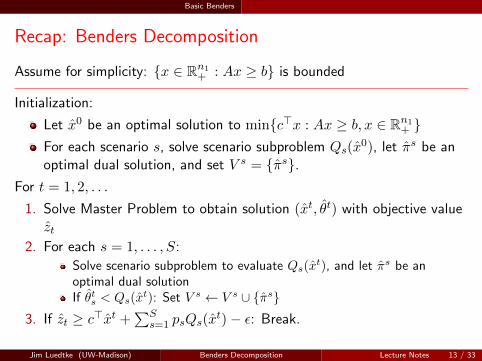
Assume for simplicity: x ∈ Rn1+ : Ax ≥ b is bounded
Initialization:
Let x0 be an optimal solution to minc>x : Ax ≥ b, x ∈ Rn1+
For each scenario s, solve scenario subproblem Qs(x0), let πs be an
optimal dual solution, and set V s = πs.For t = 1, 2, . . .
1. Solve Master Problem to obtain solution (xt, θt) with objective valuezt
2. For each s = 1, . . . , S:
Solve scenario subproblem to evaluate Qs(xt), and let πs be an
optimal dual solutionIf θts < Qs(x
t): Set V s ← V s ∪ πs3. If zt ≥ c>xt +
∑Ss=1 psQs(x
t)− ε: Break.
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 13 / 33
Basic Benders
Convergence
The algorithm trivially terminates finitely
Only finitely many extreme point dual solutions
If no new cuts added, lower and upper bounds will be equal
But no guarantee on rate of convgerence (similar to simplex)
In practice, often converges “pretty fast”, but occasionally disastrous
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 14 / 33
Basic Benders
Implementation Notes
Must use a cut violation tolerance, e.g., δ ≈ 10e−6:
Numerically, conclude θts < Qs(xt) only if θts < Qs(x
t)− δδ should match the feasibility tolerance of LP solver
Otherwise, you may add a “cut” that LP solver does not think isviolated ⇒ infinite loop
Not necessary to solve all scenario subproblems in every iteration
But only obtain an upper bound (and hence can consider terminating)when all are solved
Focus on “useful” scenarios
Scenario subproblems can be solved in parallel
Parallel scalability eventually limited by master problem
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 15 / 33
Basic Benders Example
A First Example
minx1 + x2
subject to
ω1x1 + x2 ≥ 7
ω2x1 + x2 ≥ 4
x1 ≥ 0
x2 ≥ 0
ω = (ω1, ω2) ∈ Ω = (1, 1/3), (5/2, 2/3), (4, 1)Each outcome has ps = 1
3
Huh?
This problem doesn’t make sense!
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 16 / 33
Basic Benders Example
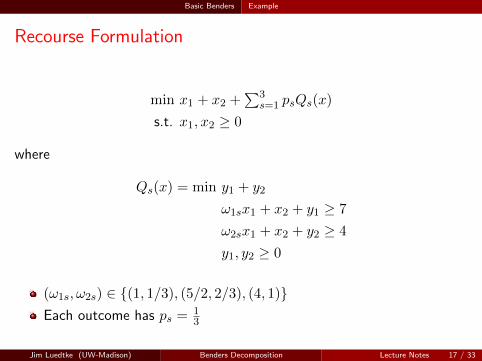
Recourse Formulation
min x1 + x2 +∑3
s=1 psQs(x)
s.t. x1, x2 ≥ 0
where
Qs(x) = min y1 + y2
ω1sx1 + x2 + y1 ≥ 7
ω2sx1 + x2 + y2 ≥ 4
y1, y2 ≥ 0
(ω1s, ω2s) ∈ (1, 1/3), (5/2, 2/3), (4, 1)Each outcome has ps = 1
3
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 17 / 33
Handling Infeasible Subproblems
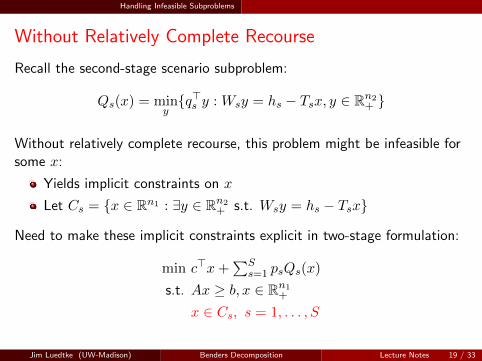
Without Relatively Complete Recourse
Recall the second-stage scenario subproblem:
Qs(x) = minyq>s y : Wsy = hs − Tsx, y ∈ Rn2
+
Without relatively complete recourse, this problem might be infeasible forsome x:
Yields implicit constraints on x
Let Cs = x ∈ Rn1 : ∃y ∈ Rn2+ s.t. Wsy = hs − Tsx
Need to make these implicit constraints explicit in two-stage formulation:
min c>x+∑S
s=1 psQs(x)
s.t. Ax ≥ b, x ∈ Rn1+
x ∈ Cs, s = 1, . . . , S
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 19 / 33
Handling Infeasible Subproblems
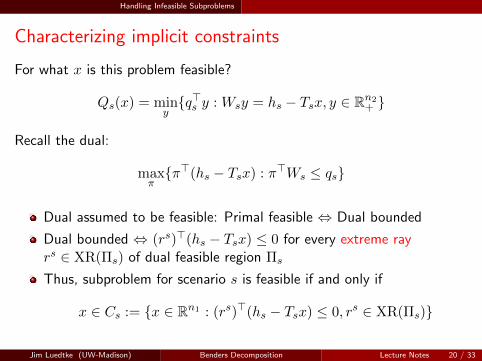
Characterizing implicit constraints
For what x is this problem feasible?
Qs(x) = minyq>s y : Wsy = hs − Tsx, y ∈ Rn2
+
Recall the dual:
maxππ>(hs − Tsx) : π>Ws ≤ qs
Dual assumed to be feasible: Primal feasible ⇔ Dual bounded
Dual bounded ⇔ (rs)>(hs − Tsx) ≤ 0 for every extreme rayrs ∈ XR(Πs) of dual feasible region Πs
Thus, subproblem for scenario s is feasible if and only if
x ∈ Cs := x ∈ Rn1 : (rs)>(hs − Tsx) ≤ 0, rs ∈ XR(Πs)
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 20 / 33
Handling Infeasible Subproblems
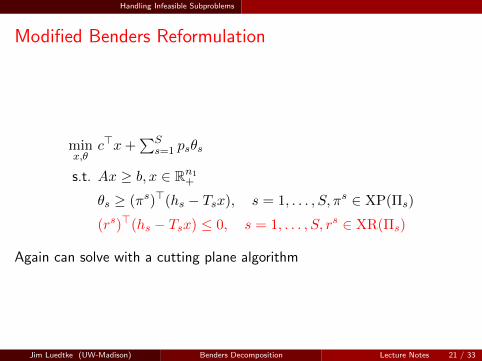
Modified Benders Reformulation
minx,θ
c>x+∑S
s=1 psθs
s.t. Ax ≥ b, x ∈ Rn1+
θs ≥ (πs)>(hs − Tsx), s = 1, . . . , S, πs ∈ XP(Πs)
(rs)>(hs − Tsx) ≤ 0, s = 1, . . . , S, rs ∈ XR(Πs)
Again can solve with a cutting plane algorithm
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 21 / 33
Handling Infeasible Subproblems
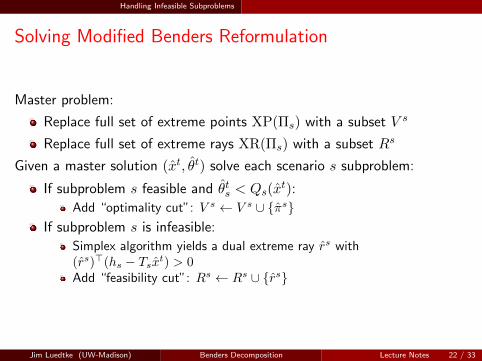
Solving Modified Benders Reformulation
Master problem:
Replace full set of extreme points XP(Πs) with a subset V s
Replace full set of extreme rays XR(Πs) with a subset Rs
Given a master solution (xt, θt) solve each scenario s subproblem:
If subproblem s feasible and θts < Qs(xt):
Add “optimality cut”: V s ← V s ∪ πsIf subproblem s is infeasible:
Simplex algorithm yields a dual extreme ray rs with(rs)>(hs − Tsxt) > 0Add “feasibility cut”: Rs ← Rs ∪ rs
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 22 / 33
Single-cut Benders
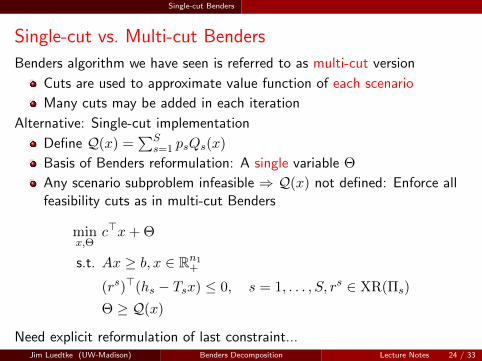
Single-cut vs. Multi-cut Benders
Benders algorithm we have seen is referred to as multi-cut version
Cuts are used to approximate value function of each scenario
Many cuts may be added in each iteration
Alternative: Single-cut implementation
Define Q(x) =∑S
s=1 psQs(x)
Basis of Benders reformulation: A single variable Θ
Any scenario subproblem infeasible ⇒ Q(x) not defined: Enforce allfeasibility cuts as in multi-cut Benders
minx,Θ
c>x+ Θ
s.t. Ax ≥ b, x ∈ Rn1+
(rs)>(hs − Tsx) ≤ 0, s = 1, . . . , S, rs ∈ XR(Πs)
Θ ≥ Q(x)
Need explicit reformulation of last constraint...Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 24 / 33
Single-cut Benders
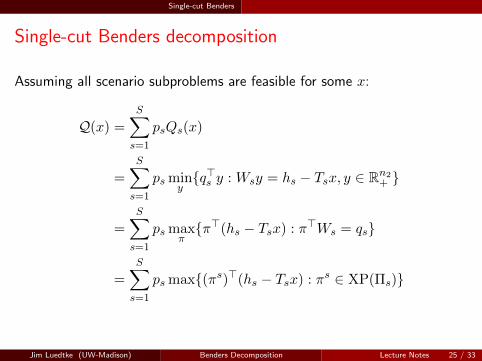
Single-cut Benders decomposition
Assuming all scenario subproblems are feasible for some x:
Q(x) =
S∑s=1
psQs(x)
=
S∑s=1
ps minyq>s y : Wsy = hs − Tsx, y ∈ Rn2
+
=
S∑s=1
ps maxππ>(hs − Tsx) : π>Ws = qs
=
S∑s=1
ps max(πs)>(hs − Tsx) : πs ∈ XP(Πs)
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 25 / 33
Single-cut Benders
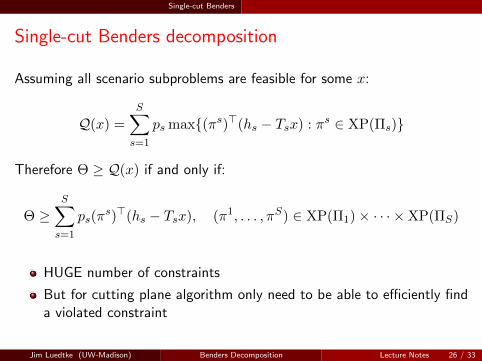
Single-cut Benders decomposition
Assuming all scenario subproblems are feasible for some x:
Q(x) =
S∑s=1
ps max(πs)>(hs − Tsx) : πs ∈ XP(Πs)
Therefore Θ ≥ Q(x) if and only if:
Θ ≥S∑s=1
ps(πs)>(hs − Tsx), (π1, . . . , πS) ∈ XP(Π1)× · · · ×XP(ΠS)
HUGE number of constraints
But for cutting plane algorithm only need to be able to efficiently finda violated constraint
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 26 / 33
Single-cut Benders
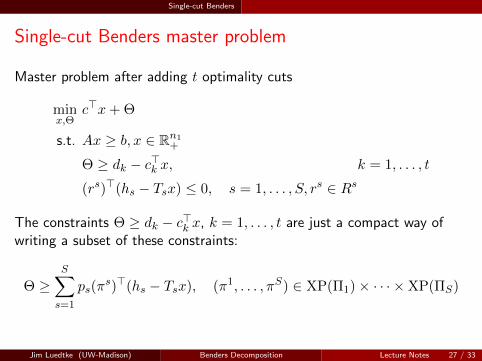
Single-cut Benders master problem
Master problem after adding t optimality cuts
minx,Θ
c>x+ Θ
s.t. Ax ≥ b, x ∈ Rn1+
Θ ≥ dk − c>k x, k = 1, . . . , t
(rs)>(hs − Tsx) ≤ 0, s = 1, . . . , S, rs ∈ Rs
The constraints Θ ≥ dk − c>k x, k = 1, . . . , t are just a compact way ofwriting a subset of these constraints:
Θ ≥S∑s=1
ps(πs)>(hs − Tsx), (π1, . . . , πS) ∈ XP(Π1)× · · · ×XP(ΠS)
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 27 / 33
Single-cut Benders
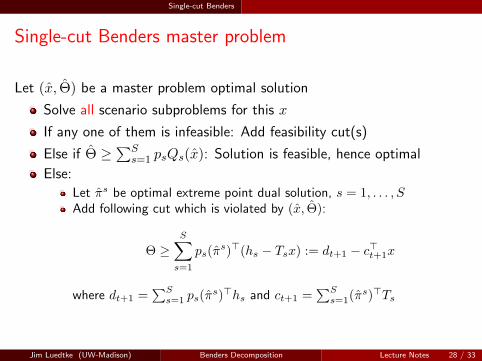
Single-cut Benders master problem
Let (x, Θ) be a master problem optimal solution
Solve all scenario subproblems for this x
If any one of them is infeasible: Add feasibility cut(s)
Else if Θ ≥∑S
s=1 psQs(x): Solution is feasible, hence optimal
Else:
Let πs be optimal extreme point dual solution, s = 1, . . . , SAdd following cut which is violated by (x, Θ):
Θ ≥S∑
s=1
ps(πs)>(hs − Tsx) := dt+1 − c>t+1x
where dt+1 =∑S
s=1 ps(πs)>hs and ct+1 =
∑Ss=1(πs)>Ts
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 28 / 33
Single-cut Benders
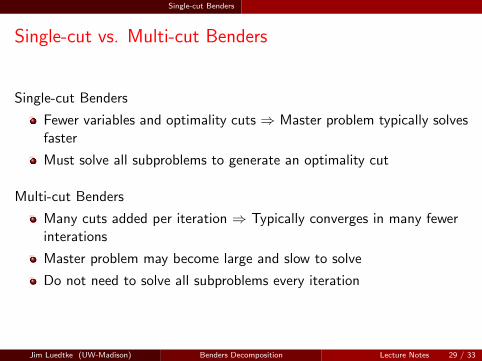
Single-cut vs. Multi-cut Benders
Single-cut Benders
Fewer variables and optimality cuts ⇒ Master problem typically solvesfaster
Must solve all subproblems to generate an optimality cut
Multi-cut Benders
Many cuts added per iteration ⇒ Typically converges in many fewerinterations
Master problem may become large and slow to solve
Do not need to solve all subproblems every iteration
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 29 / 33
Cut Selection
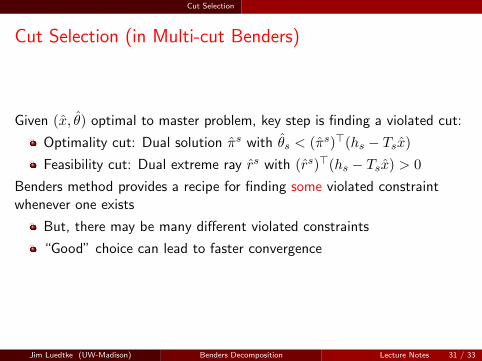
Cut Selection (in Multi-cut Benders)
Given (x, θ) optimal to master problem, key step is finding a violated cut:
Optimality cut: Dual solution πs with θs < (πs)>(hs − Tsx)
Feasibility cut: Dual extreme ray rs with (rs)>(hs − Tsx) > 0
Benders method provides a recipe for finding some violated constraintwhenever one exists
But, there may be many different violated constraints
“Good” choice can lead to faster convergence
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 31 / 33
Cut Selection
Alternative Cut Generation Problem
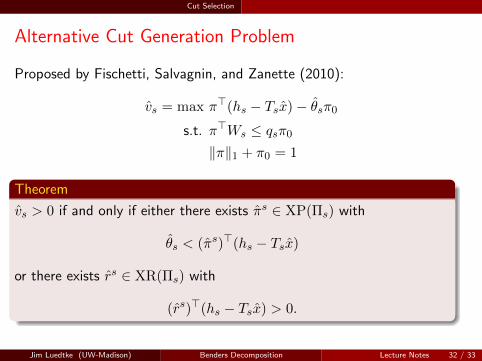
Proposed by Fischetti, Salvagnin, and Zanette (2010):
vs = max π>(hs − Tsx)− θsπ0
s.t. π>Ws ≤ qsπ0
‖π‖1 + π0 = 1
Theorem
vs > 0 if and only if either there exists πs ∈ XP(Πs) with
θs < (πs)>(hs − Tsx)
or there exists rs ∈ XR(Πs) with
(rs)>(hs − Tsx) > 0.
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 32 / 33
Cut Selection
Alternative Cut Generation Problem
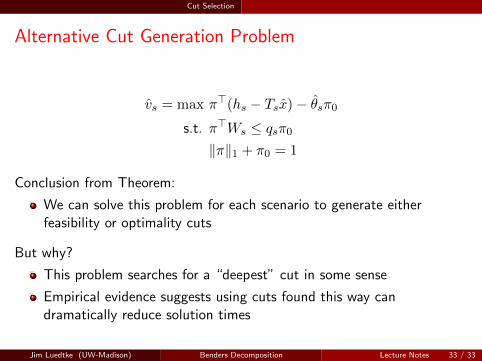
vs = max π>(hs − Tsx)− θsπ0
s.t. π>Ws ≤ qsπ0
‖π‖1 + π0 = 1
Conclusion from Theorem:
We can solve this problem for each scenario to generate eitherfeasibility or optimality cuts
But why?
This problem searches for a “deepest” cut in some sense
Empirical evidence suggests using cuts found this way candramatically reduce solution times
Jim Luedtke (UW-Madison) Benders Decomposition Lecture Notes 33 / 33
![A Class of Benders Decomposition Methods for Variational ...pages.cs.wisc.edu/~solodov/lss19Benders.pdfand (9). The latter is precisely the Benders decomposition method for LPs [3]](https://img.pdfslide.net/doc/110x75/5e9ef79ff35d580e3157a836/a-class-of-benders-decomposition-methods-for-variational-pagescswiscedusolodov.jpg)




























