Embed Size (px)
Citation preview
Benjamin StephensCarnegie Mellon University
Monday June 29, 2009
The Linear Biped Model and Application to Humanoid Estimation and Control
Introduction
2
Motivation
3
RoboticsFind simple models for complex systemsDevelop algorithms that use simple models to make
humanoid control simplerBetter way to understand and explain dynamic balance
and locomotionHuman Physiology
Evaluating biomechanical modelsUnderstand and prevent falls, which can lead to
hip/wrist fractures.
Take-Home Message
4
“The Linear Biped Model is a simple model of balance that can describe a wide range of
behaviors and be directly applied to humanoid robot estimation and control”
OutlineModeling
Balance OverviewLinear Biped ModelOrbital Energy ControlLateral Foot Placement Control
Humanoid RobotCenter of Mass EstimationFeed-forward Control
Future WorkConclusion
5
Modeling Balance
6
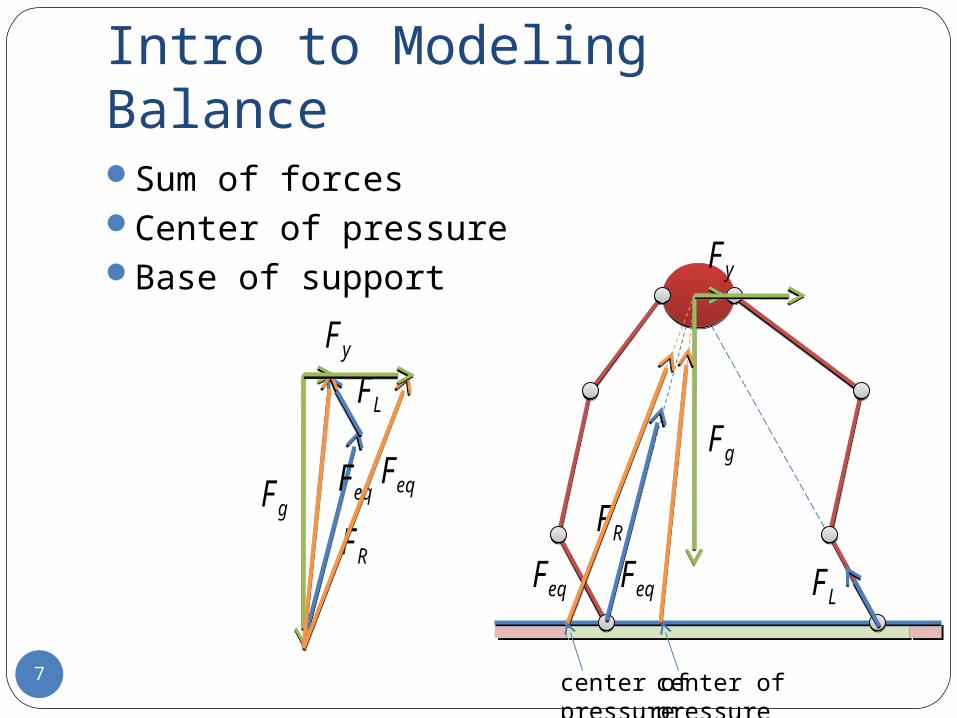
Sum of forcesCenter of pressureBase of support
Intro to Modeling Balance
7
gF
RF
LF
yF
eqF
center of pressure
gF
RF
LFyF
eqF eqF
center of pressure
eqF
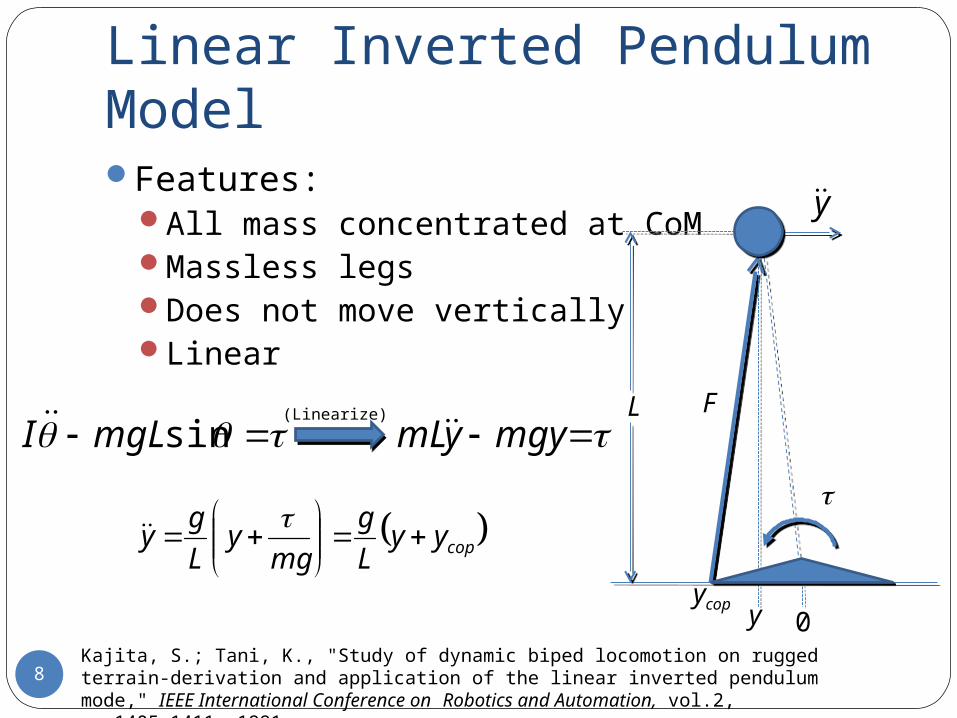
Linear Inverted Pendulum ModelFeatures:
All mass concentrated at CoMMassless legsDoes not move verticallyLinear
Kajita, S.; Tani, K., "Study of dynamic biped locomotion on rugged terrain-derivation and application of the linear inverted pendulum mode," IEEE International Conference on Robotics and Automation, vol.2, pp.1405-1411, 1991.
F
0
L
y
y
sinmgLI mgyymL
copyyL
g
mgy
L
gy
(Linearize)
copy
8
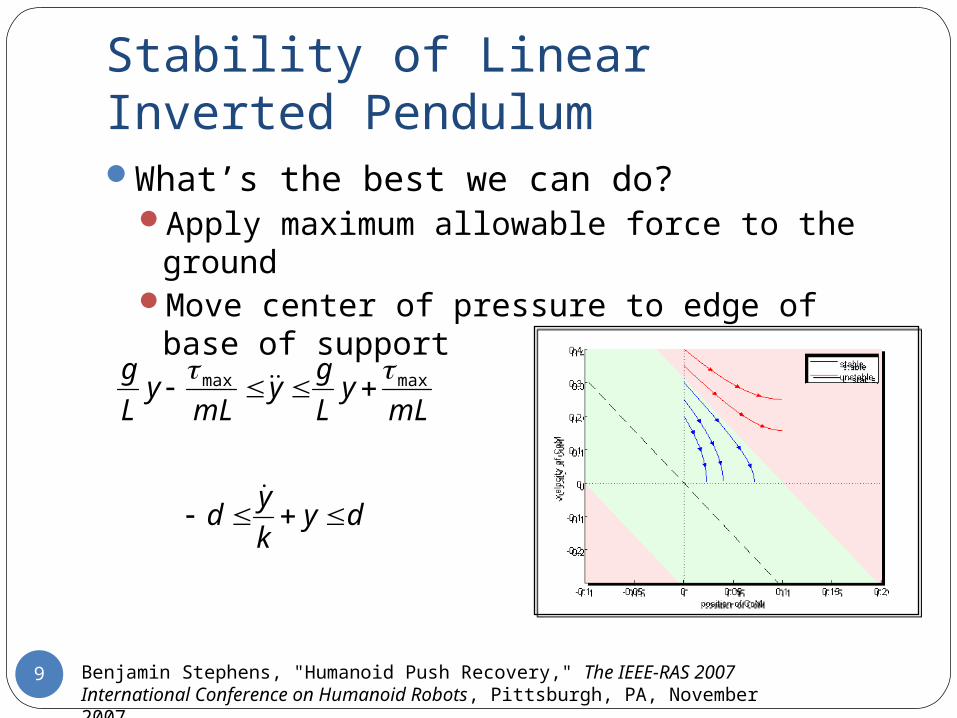
Stability of Linear Inverted PendulumWhat’s the best we can do?
Apply maximum allowable force to the groundMove center of pressure to edge of base of support
mLy
L
gy
mLy
L
g maxmax
9 Benjamin Stephens, "Humanoid Push Recovery," The IEEE-RAS 2007 International Conference on Humanoid Robots, Pittsburgh, PA, November 2007
dyk
yd
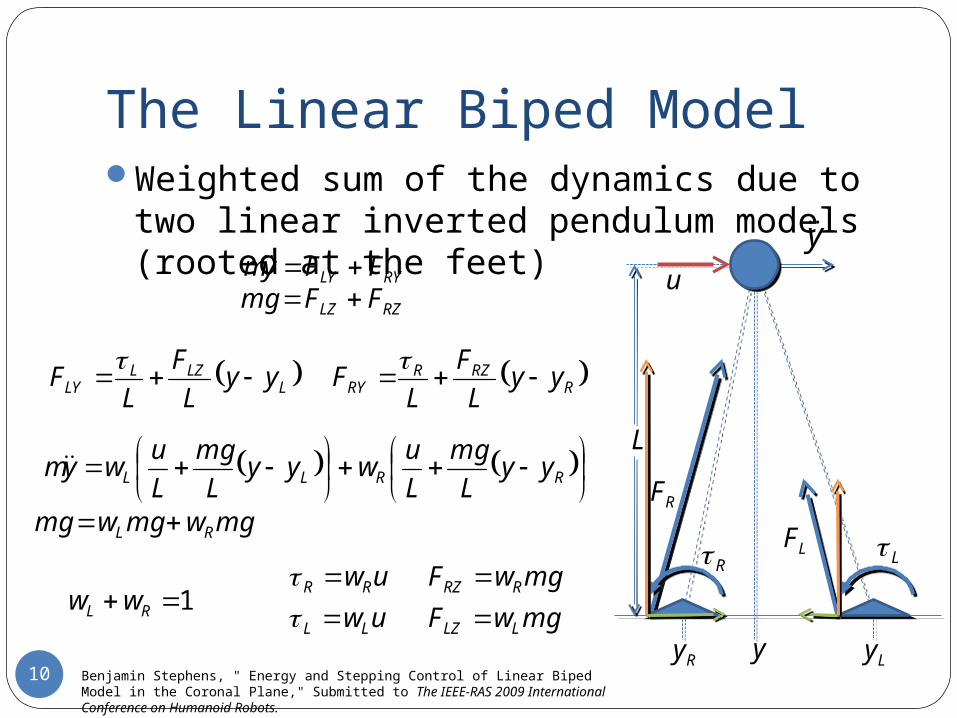
The Linear Biped ModelWeighted sum of the dynamics due to two linear
inverted pendulum models (rooted at the feet)
RF
LF
y
LyRy
L
y
R L
10 Benjamin Stephens, " Energy and Stepping Control of Linear Biped Model in the Coronal Plane," Submitted to The IEEE-RAS 2009 International Conference on Humanoid Robots.
RYLY FFym
LLZL
LY yyL
F
LF
RRZR
RY yyL
F
LF
1 RL ww
RZLZ FFmg
RRLL yy
L
mg
L
uwyy
L
mg
L
uwym
uw
uw
LL
RR
u
mgwmgwmg RL
mgwF
mgwF
LLZ
RRZ
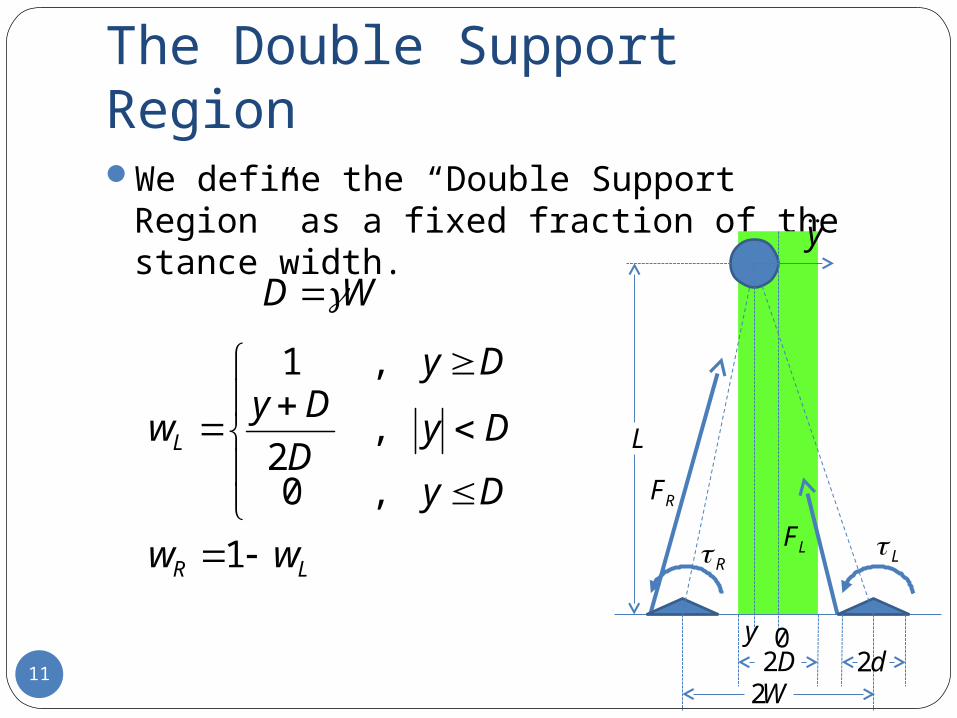
The Double Support Region
11
We define the “Double Support Region” as a fixed fraction of the stance width.
RF
LF
y
L
y
R L
D20
W2d2
WD
LR
L
ww
Dy
DyD
DyDy
w
1
,0
,2
,1
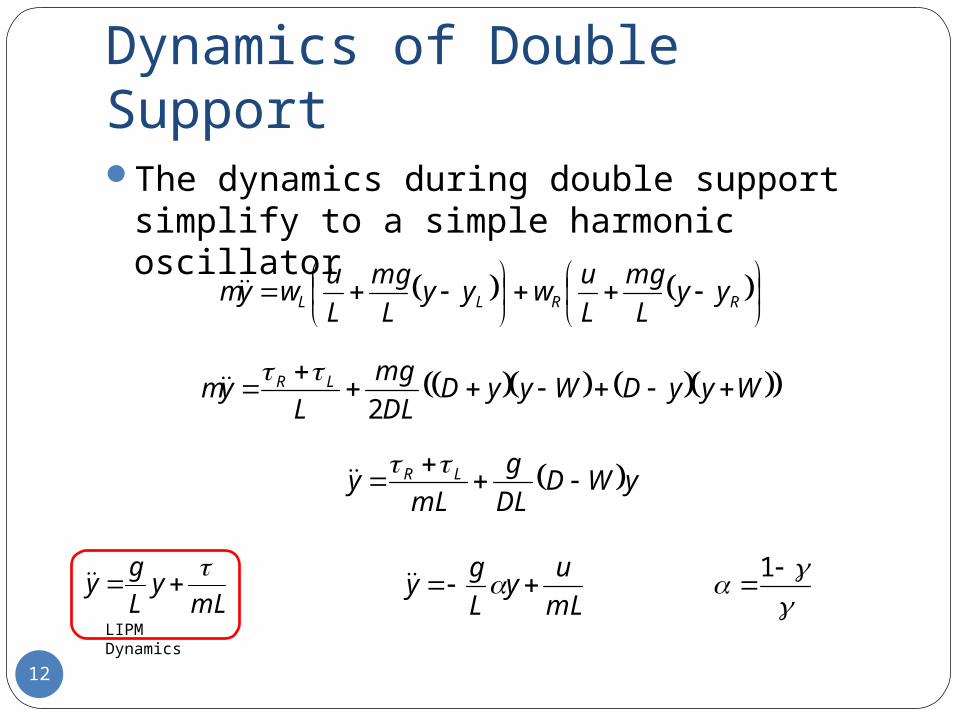
Dynamics of Double Support
12
The dynamics during double support simplify to a simple harmonic oscillator
RRLL yy
L
mg
L
uwyy
L
mg
L
uwym
WyyDWyyDDL
mg
Lym LR
2
yWDDL
g
mLy LR
mL
uy
L
gy
1
mLy
L
gy
LIPM Dynamics
Stability of the Linear Biped Model
13
What’s the best we can do?Apply maximum allowable force to the groundMove center of pressure to edge of base of support
mL
uy
L
gy
mL
uy
L
g maxmax
mgdw
mgdw
LL
RR
mgduLR
dFZ
mL
mgdy
L
gy
mL
mgdy
L
g
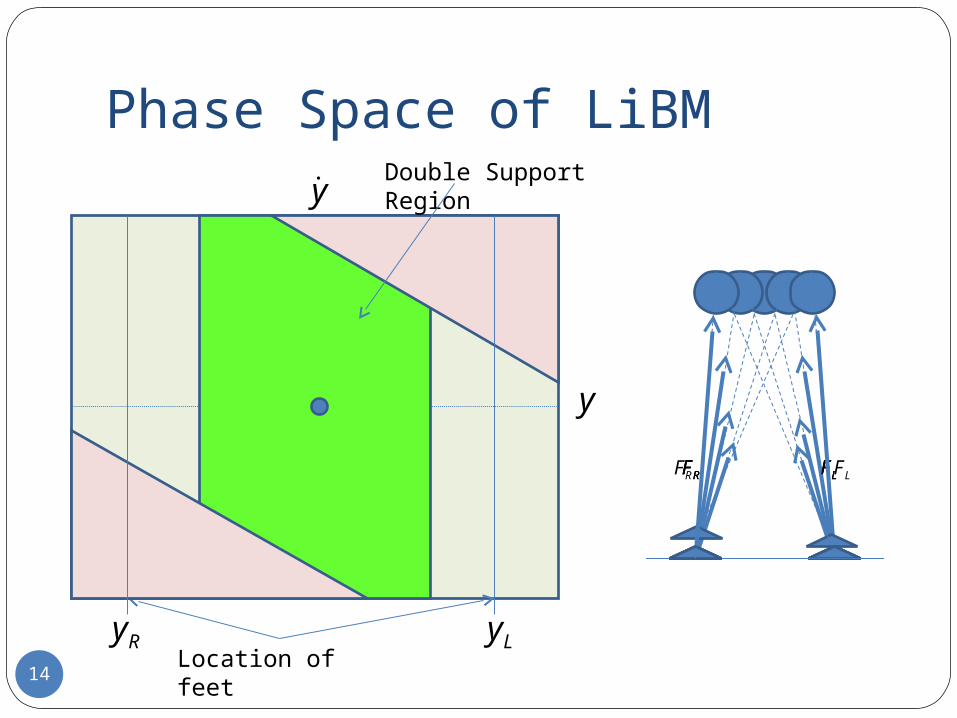
Phase Space of LiBM
y
y
RF LFRF LFRF LF
Ry LyLocation of feet
LFRF
Double Support Region
14
Controlling Balance
15
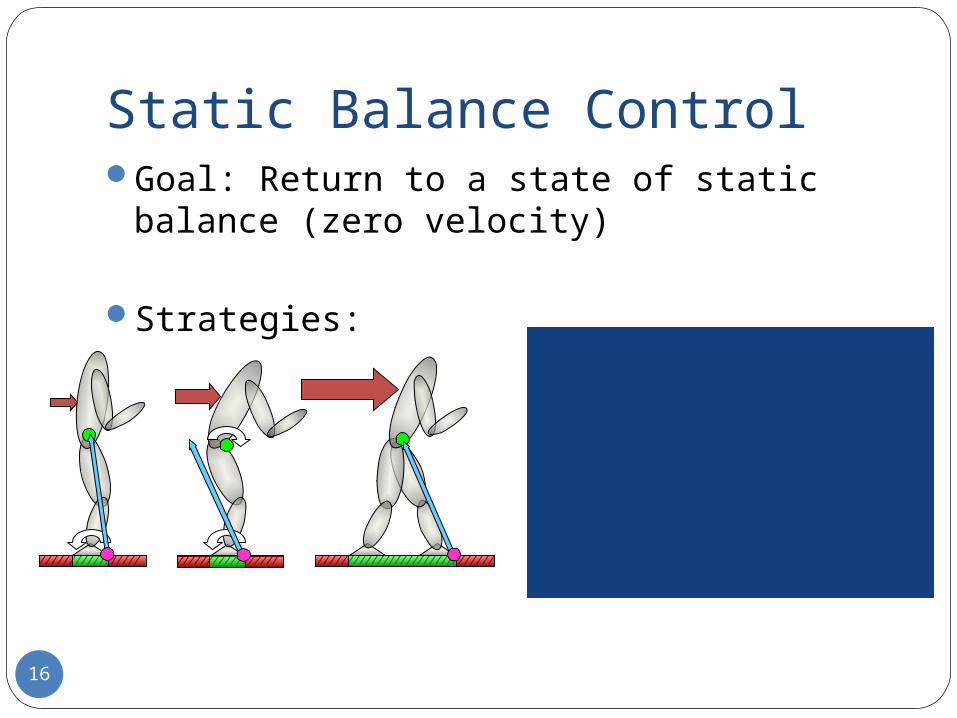
Static Balance Control
16
Goal: Return to a state of static balance (zero velocity)
Strategies:
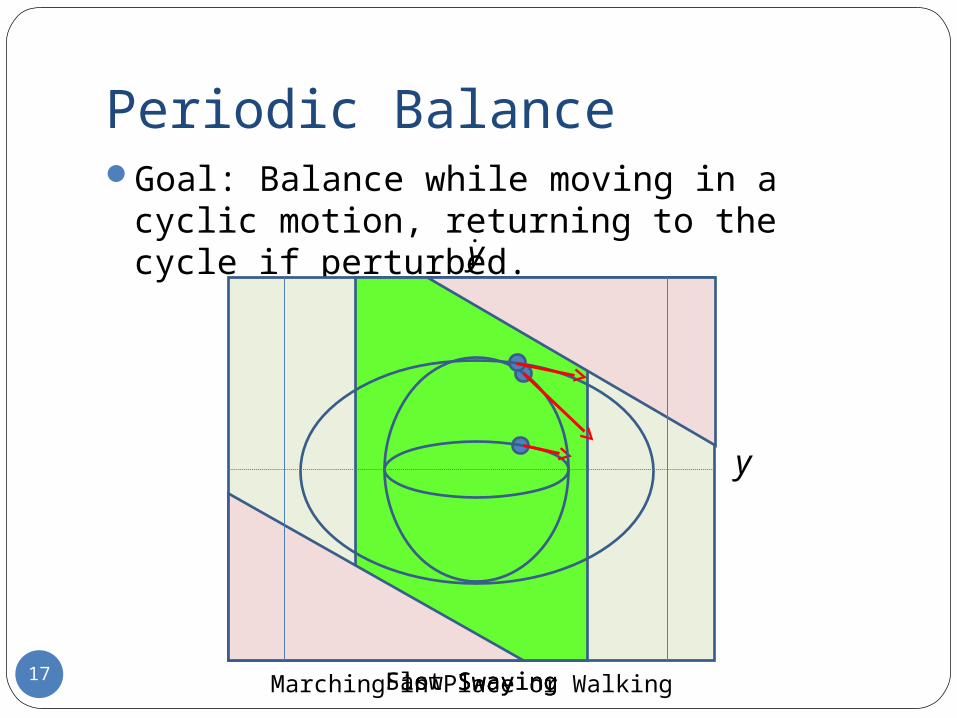
Periodic BalanceGoal: Balance while moving in a cyclic motion,
returning to the cycle if perturbed.
17
y
y
Slow SwayingFast SwayingMarching in Place or Walking
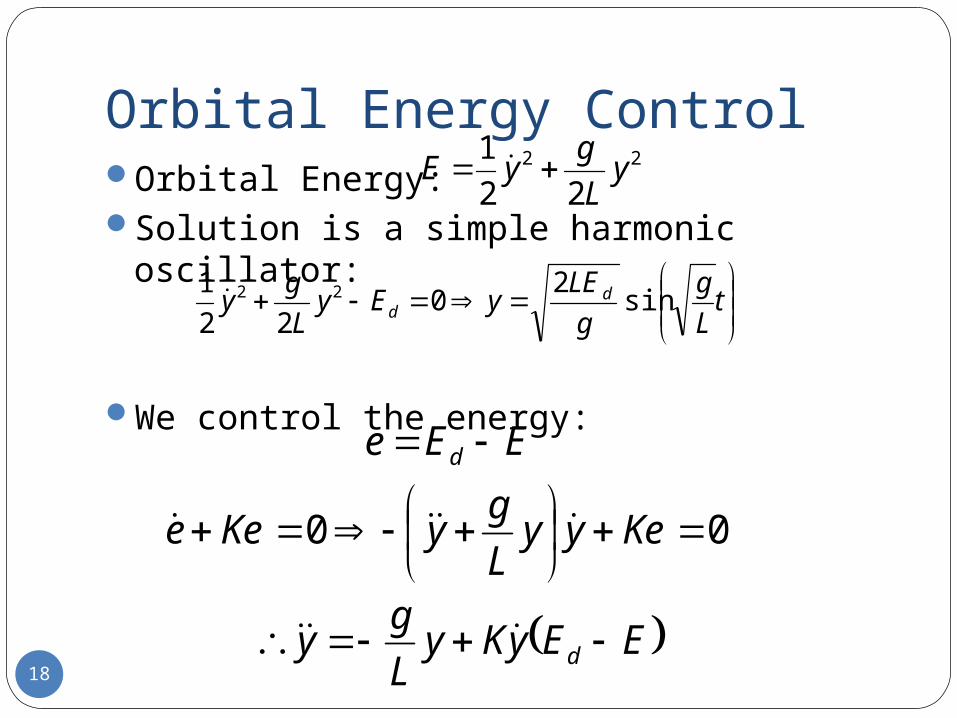
Orbital Energy ControlOrbital Energy:Solution is a simple harmonic oscillator:
We control the energy:
22
22
1y
L
gyE
t
L
g
g
LEyEy
L
gy d
d sin2
022
1 22
EEe d
00
Keyy
L
gyKee
EEyKyL
gy d
18
19
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
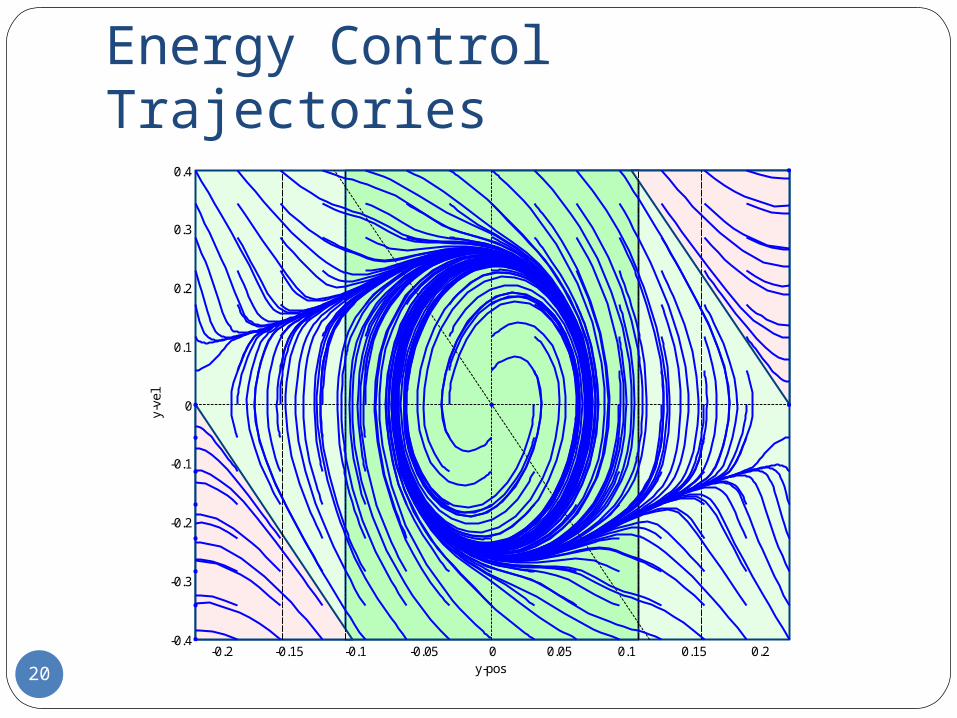
y-pos
y-vel
Energy Control Trajectories
20
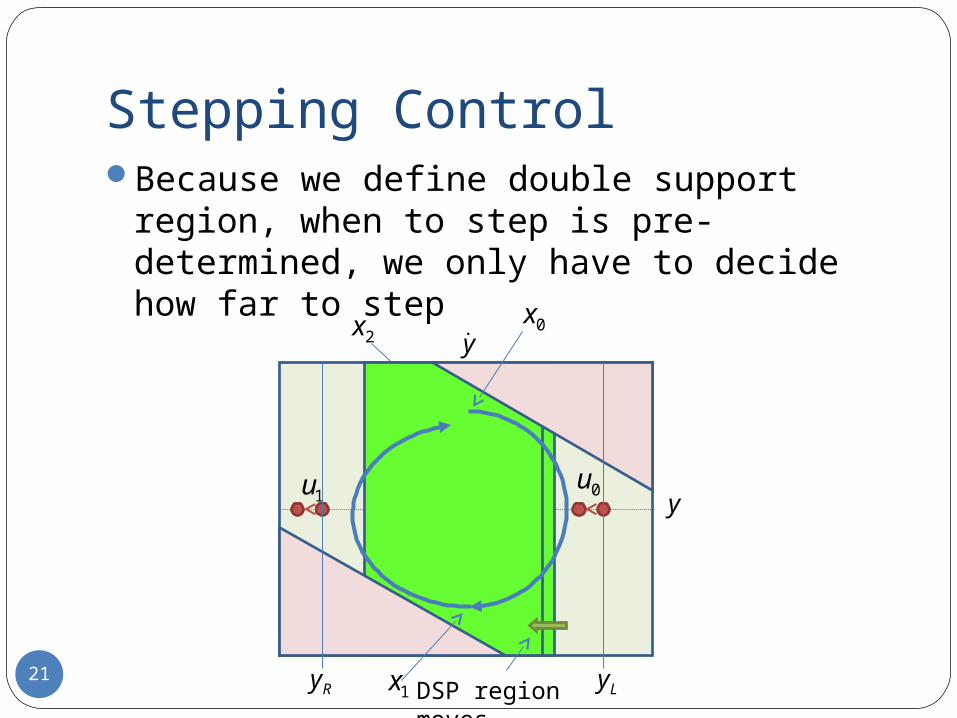
Stepping ControlBecause we define double support region, when to
step is pre-determined, we only have to decide how far to step
y
y
Ry Ly
0x2x
1x
0u1u
DSP region moves21
N-Step ControllerBecause DSP region is fixed, we know when to take a
step, only need to decide whereN-Step lookahead over a set foot step distances
Benefits:Very fastWorks for any desired energyRecovers from PushesStabilizes position
222
1 _ yKwidthstanceKcost
22
23
24
Application to Humanoid Balance
25
Humanoid Applications
26
Linear Biped Model predicts gross body motion and determines a set of forces that can produce that motion
State EstimationCombine sensors to predict important features, like center of mass motion.
Feed-Forward ControlPerform force control to generate the desired ground contact forces.
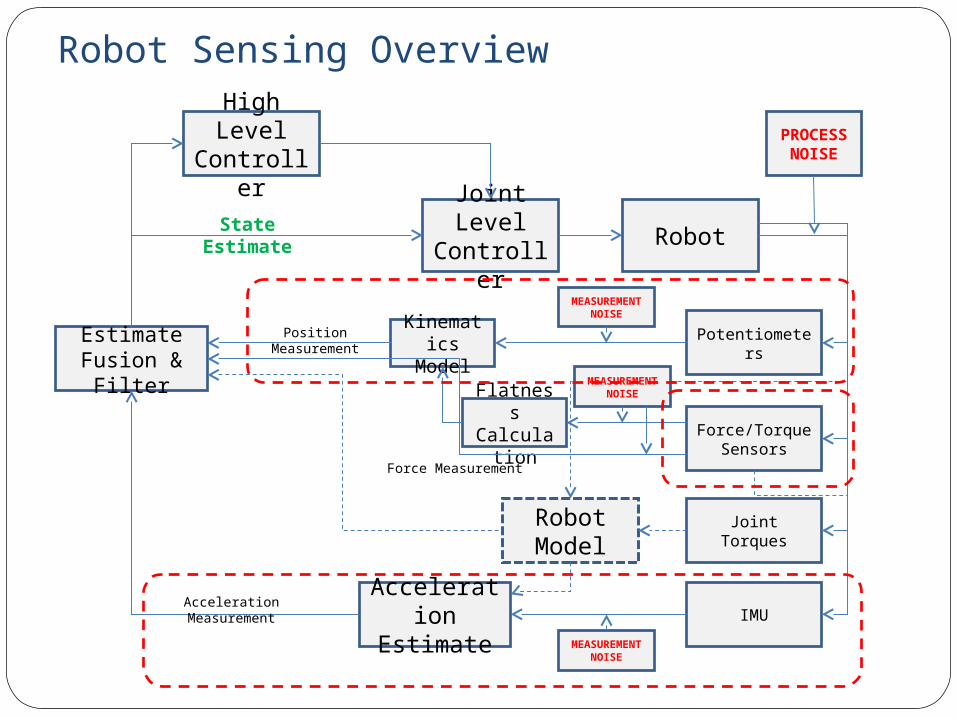
RobotJoint Level Controller
Potentiometers
Force/Torque Sensors
IMU
Joint Torques
KinematicsModel
Flatness Calculation
Position Measurement
High Level Controller
Acceleration Estimate
Estimate Fusion & Filter
RobotModel
Acceleration Measurement
Robot Sensing Overview
State Estimate
PROCESS NOISE
MEASUREMENT NOISE
MEASUREMENT NOISE
MEASUREMENT NOISE
Force Measurement
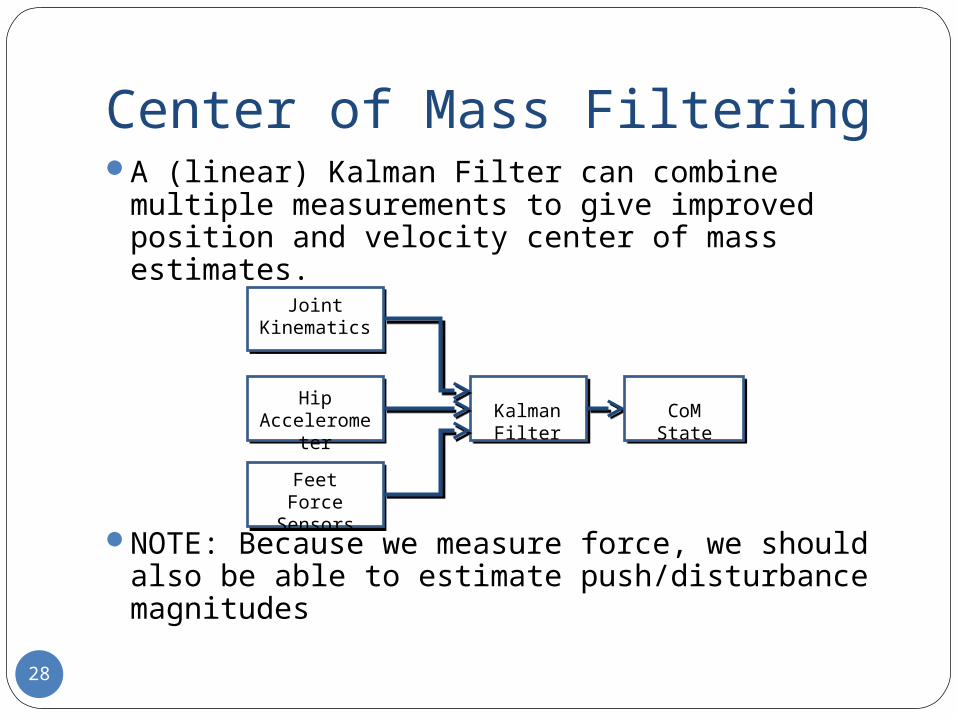
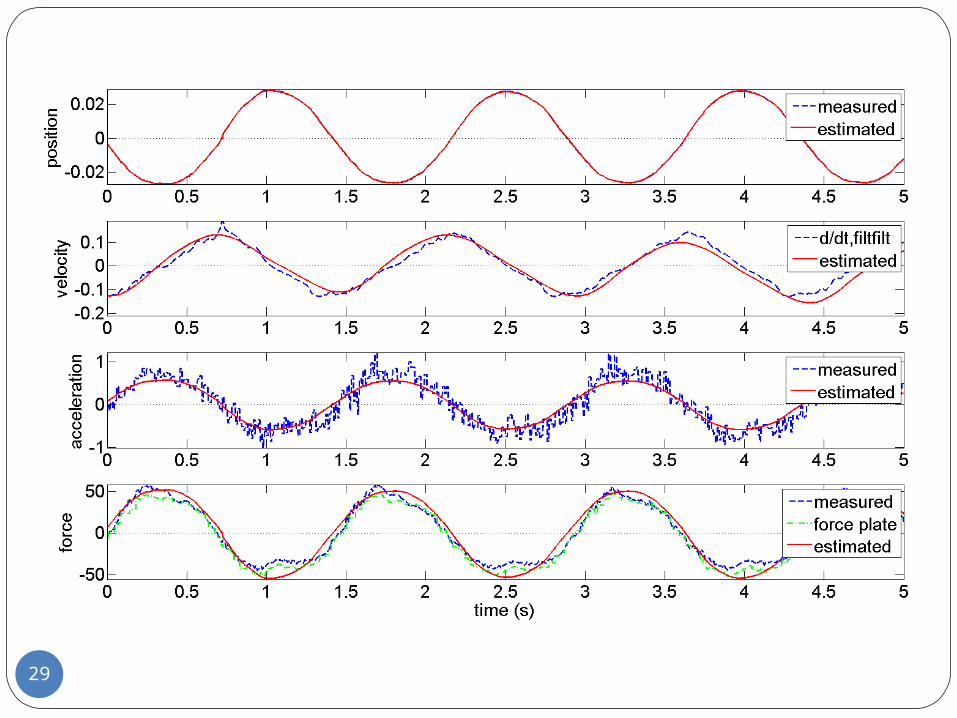
Center of Mass Filtering
28
A (linear) Kalman Filter can combine multiple measurements to give improved position and velocity center of mass estimates.
NOTE: Because we measure force, we should also be able to estimate push/disturbance magnitudes
Joint Kinematics
HipAccelerometer
FeetForce Sensors
Kalman FilterPeriodic
Humanoid Balance
Periodic Humanoid
BalanceCoM State
29
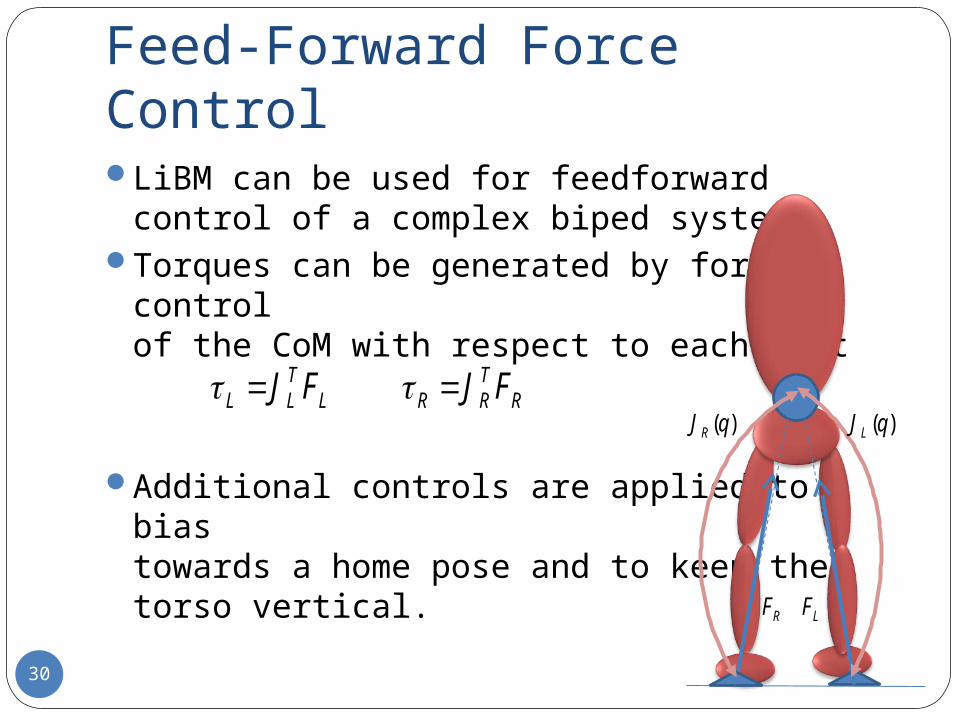
Feed-Forward Force Control
30
LiBM can be used for feedforward control of a complex biped system.
Torques can be generated by force controlof the CoM with respect to each foot
Additional controls are applied to biastowards a home pose and to keep the torso vertical.
LTLL FJ R
TRR FJ
RF LF
)(qJ L)(qJR
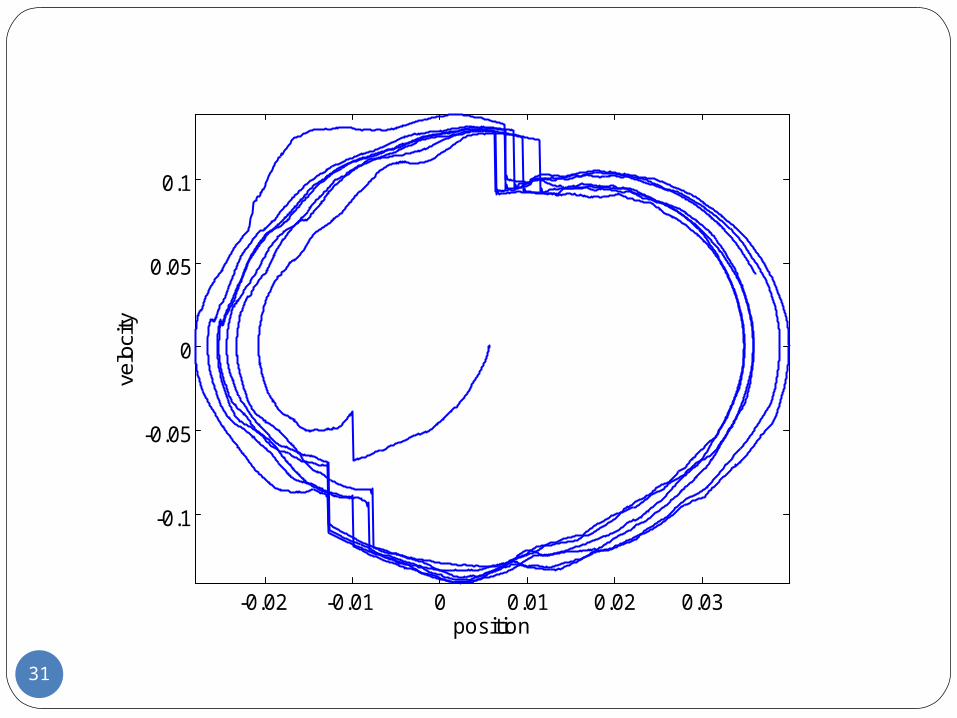
31
-0.02 -0.01 0 0.01 0.02 0.03
-0.1
-0.05
0
0.05
0.1
position
velocity
Movie Summary
32
Conclusion
33
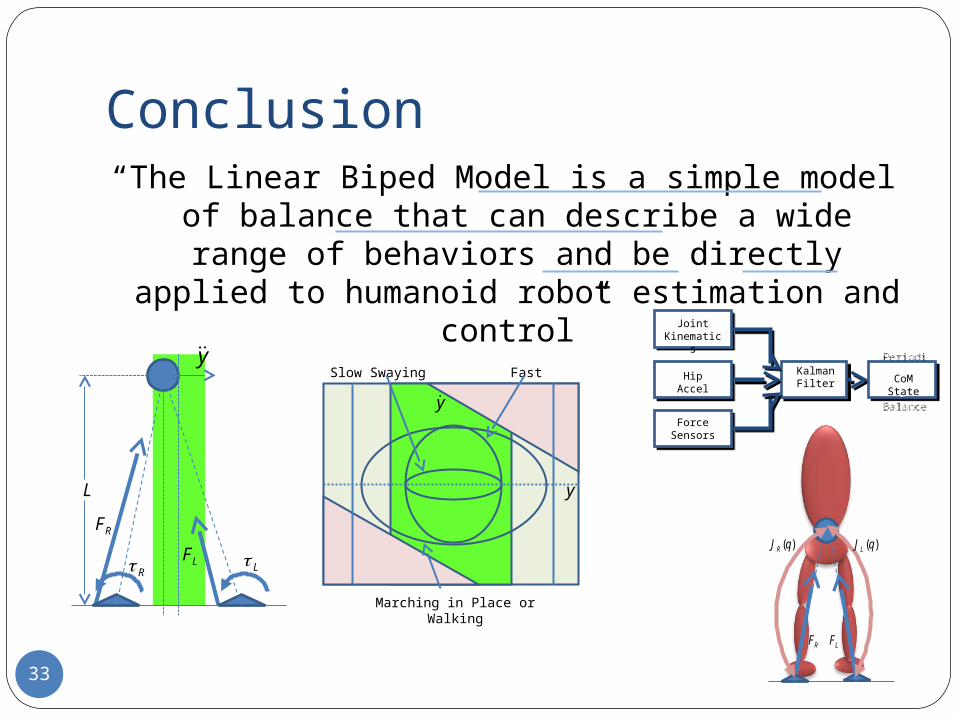
“The Linear Biped Model is a simple model of balance that can describe a wide range of behaviors and be directly
applied to humanoid robot estimation and control”
RF
LF
y
L
R L
y
Slow Swaying Fast Swaying
Marching in Place or Walking
y
Joint Kinematics
HipAccel
Force Sensors
Kalman Filter
Periodic Humanoid
Balance
Periodic Humanoid
BalanceCoM State
RF LF
)(qJ L)(qJR
Future Work
34
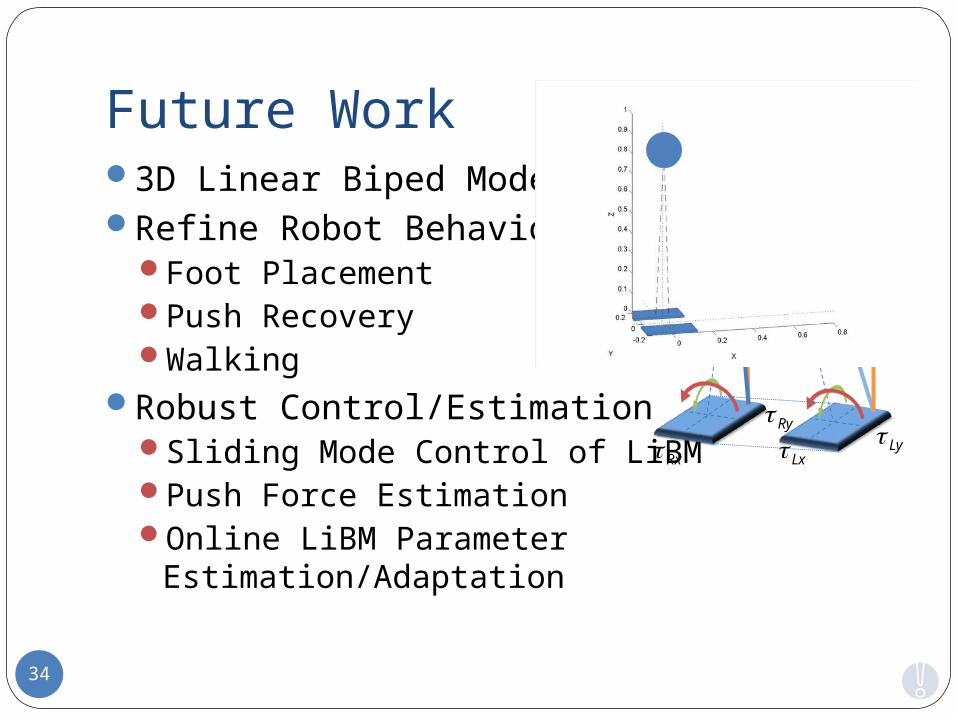
3D Linear Biped ModelRefine Robot Behaviors
Foot PlacementPush RecoveryWalking
Robust Control/EstimationSliding Mode Control of LiBMPush Force EstimationOnline LiBM Parameter Estimation/Adaptation
RxF
x
Lx
y
RyF
LzF
RzF
LyF LxF
xy
z
LyRx
Ry
The End
35
Thanks to Research Committee Members:Chris AtkesonJessica HodginsMartial HerbertStuart Anderson
Questions?
37
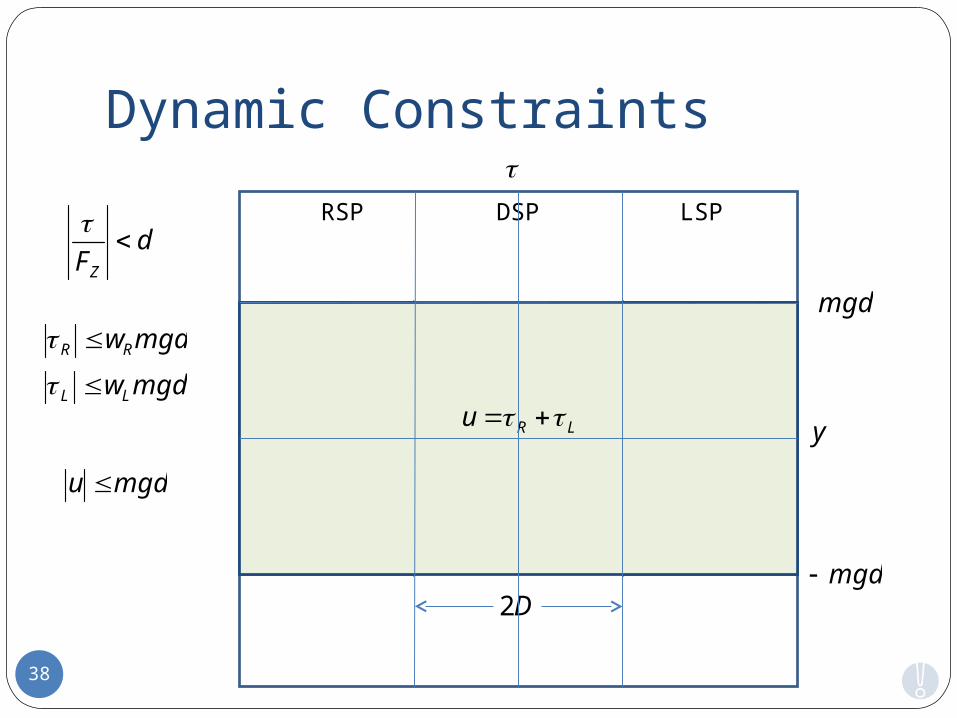
Dynamic Constraints
mgdw
mgdw
LL
RR
y
R
L
D2
DSP RSP LSP
mgd
mgd
LRu
mgdu
38
dFZ
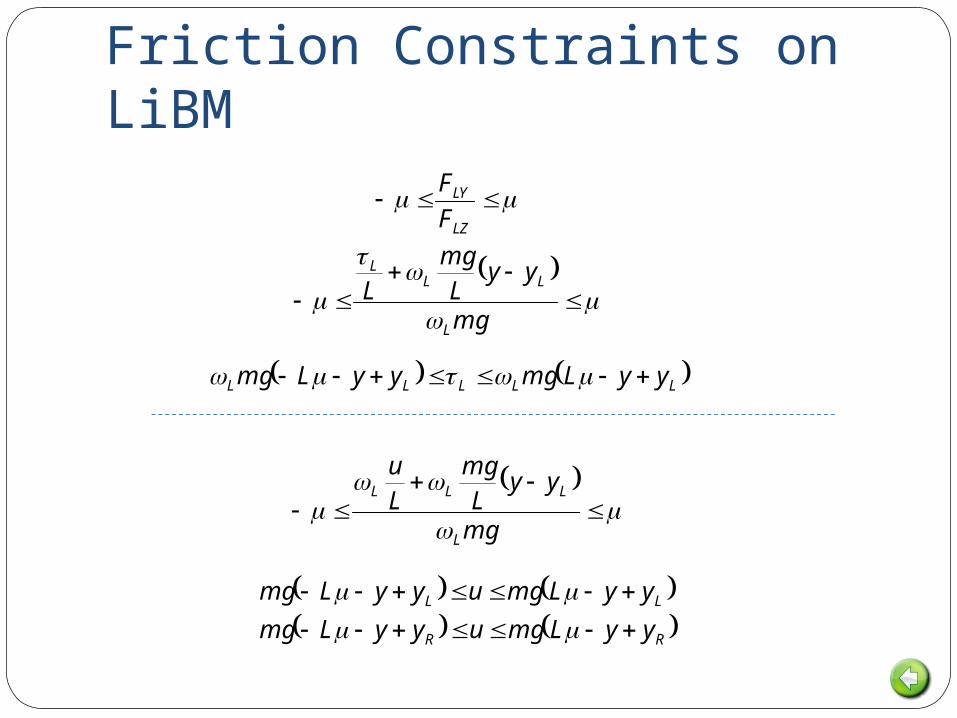
Friction Constraints on LiBM
LZ
LY
F
F
mg
yyLmg
L
L
LLL
LLLLL yyLmgyyLmg
mg
yyLmg
Lu
L
LLL
RR
LL
yyLmguyyLmg
yyLmguyyLmg
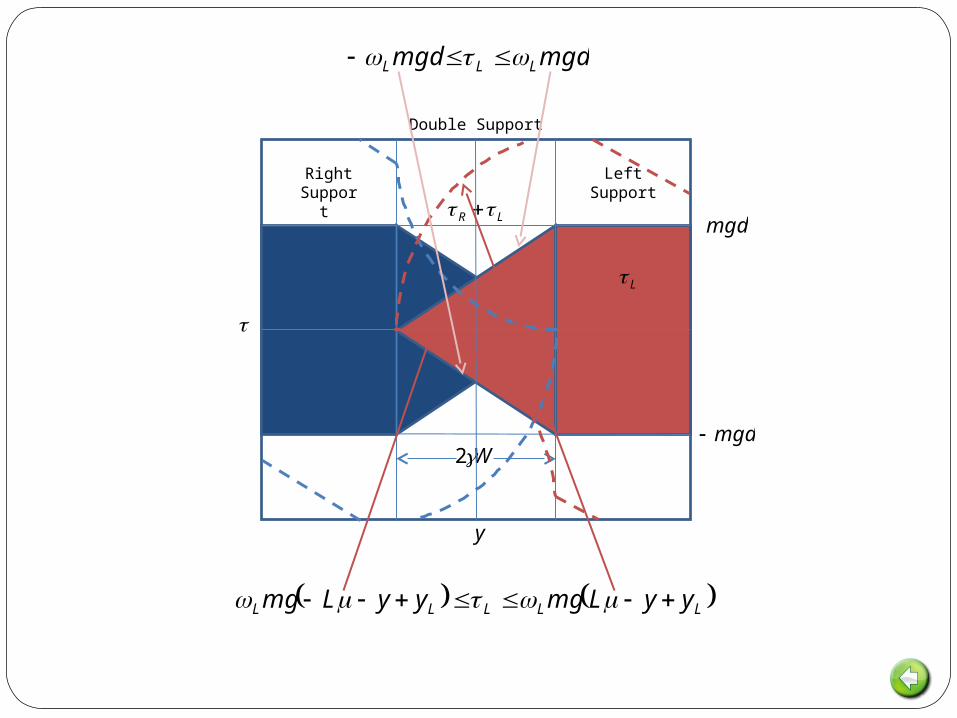
y
R
L
W2
Double Support
Right Support
LeftSupport
mgd
mgd
LR
mgdmgd LLL
LLLLL yyLmgyyLmg

Hybrid Orbital Energy
DSP region!
22
22
1x
L
gxEDSP
In DSP region, we use the same energy equation as before, x is relative to half way between feet
22
22
1x
L
gxESSP
In SSP region, we use the orbital energy, x is relative to stance foot
Energy at middle of SSP determines curve





























