Embed Size (px)
Citation preview

Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
Contents lists available at SciVerse ScienceDirect
Commun Nonlinear Sci Numer Simulat
journal homepage: www.elsevier .com/locate /cnsns
Bifurcation analysis of a Lyapunov-based controlled boostconverter
1007-5704/$ - see front matter � 2013 Elsevier B.V. All rights reserved.http://dx.doi.org/10.1016/j.cnsns.2013.03.018
⇑ Corresponding author. Tel.: +34 934134107.E-mail address: [email protected] (J.M. Olm).
Please cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. CoNonlinear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018
Mario Spinetti-Rivera a, Josep M. Olm b,⇑, Domingo Biel c, Enric Fossas c
a School of Engineering, Universidad de Los Andes, Mérida, Venezuelab Institute of Industrial and Control Engineering, Universitat Politècnica de Catalunya, 08028 Barcelona, Spainc Department of Applied Mathematics IV, Universitat Politècnica de Catalunya, 08860 Catelldefels, Spain
a r t i c l e i n f o a b s t r a c t
Article history:Received 12 December 2012Received in revised form 21 March 2013Accepted 30 March 2013Available online xxxx
Keywords:Boost converterLyapunov-based controlBifurcationsBounded quadratic systems
Lyapunov-based controlled boost converters have a unique equilibrium point, which isglobally asymptotically stable, for known resistive loads. This article investigates thedynamic behaviors that appear in the system when the nominal load differs from theactual one and no action is taken by the controller to compensate for the mismatch.Exploiting the fact that the closed-loop system is, in fact, planar and quadratic, one mayprovide not only local but also global stability results: specifically, it is proved that thenumber of equilibria of the converter may grow up to three and that, in any case, the sys-tem trajectories are always bounded, i.e. it is a bounded quadratic system. The possiblephase portraits of the closed-loop system are also characterized in terms of the selectedbifurcation parameters, namely, the actual load value and the gain of the control law.Accordingly, the analysis allows the numerical illustration of many bifurcation phenomenathat appear in bounded quadratic systems through a physical example borrowed frompower electronics.
� 2013 Elsevier B.V. All rights reserved.
1. Introduction
Lyapunov-based control for switched power converters was addressed by Sanders and Verghese in a seminal paper withthis title published in 1992 [1]. Departing from fundamental properties such as passivity or incremental passivity they foundLyapunov functions for the stability in the large of nominal, open-loop operations in switched systems. The obtained Lyapu-nov function was then used to design globally stabilizing linear controllers which included adaptive schemes to handleuncertain nominal parameters. Applications of this technique using specific adaptive schemes that include a Krener-Isidori-Respondek type observer, integral action and an algebraic estimator are reported in [2–4], respectively.
The results in [1] were generalized to a class of nonlinear systems in [5,6]. Therein the authors identified a class of non-linear passive systems of the form _x ¼ f ðxÞ þ gu; y ¼ hðxÞ, with an incremental model that was also passive and globallystabilized a class of RLC circuits through linear PI controllers. Unfortunately, non-linear elementary converters as boost orbuck-boost do not belong to this class. In spite of that, they have been tackled through PI linear controllers guaranteeing localasymptotic stability.
A DC–DC boost converter is a non-minimum phase, planar bilinear system. It is used in power electronics to regulate,actually to boost, an input DC voltage. A standard controller consists of two loops: an outer voltage loop defining the currentreference and an inner current loop. Because of its simplicity and its non-linear character, this device has been used as a test-bed to assess a number of non-linear controllers: sliding modes [7], feedback linearization [8] or Interconnexion and
mmun

E
Lu
C Ri
v
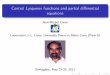
Fig. 1. The ideal boost converter.
2 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
Damping Assignment–Passivity Based Control (IDA-PBC) [9], among others (see [10] for a recent overview on this subject). Itis also worth mentioning that an important research effort has been devoted to the bifurcation analysis of basics switchingconverters, including the boost, in the last two decades: see, for example, [11–18] and references therein. The reasons maywell lie on an initial interest in understanding their nontrivial dynamics, later followed by the fact that its intrinsic variablestructure nature turn them into physical examples of systems to be studied via the emerging and challenging field of non-smooth analysis [19,20]. It is finally relevant that bifurcation analysis commences to be considered for design tasks at severalstages: its use for instability prediction and sliding mode controllers design are reported, respectively, in [21–24], while itssuitability as a practical design tool of power electronics circuits is discussed in [25,26].
Following [1], one can obtain a Lyapunov-based controller for a boost converter derived from the natural energy storages.Such a control action depends on the load, which requires the use of a nominal load value. When nominal and actual loadcoincide, the closed-loop exhibits a single equilibrium point, which is Globally Asymptotically Stable (GAS). However, whenthe controller uses the nominal load value while the converter feeds an unknown load and no action is taken to compensatefor the mismatch, a set of rich dynamics appear. The situation is studied in [11] for a boost converter with loss resistance:using local stability analysis the authors report the presence of static (jumps between different equilibria) and dynamic (on-set of limit cycles) bifurcation phenomena depending on load variations from the nominal value.
This article considers the ideal boost converter and takes advantage of the fact that the closed-loop system is, indeed, aplanar quadratic system. This allows us to study local and also global behaviors as well using the general framework estab-lished in [27]. Hence, it is proved that whatever the difference between nominal and actual load value is, the system trajec-tories are always bounded, i.e. it is a Bounded Quadratic System (BQS). Then, it is found out that the unique equilibrium,besides moving from the nominal position, may bifurcate into two or three equilibria. Also, the possible phase portraitsof the closed-loop system are characterized in terms of the selected bifurcation parameters, which are the actual load valueand the gain of the control law. Finally, numerical results illustrate the physical behavior of the converter in representativebifurcation scenarios; the simulations, carried out under both ideal and realistic conditions, are in agreement with the the-oretical analysis and show no qualitative differences between them.
The remainder of the article is organized as follows. The problem statement is contained in Section 2. After that, the mainresults of the bifurcation analysis are included in Section 3, while the proofs are in Section 4. The evolution of the bifurcationscenario is described in Section 5. Examples of phase portraits of different bifurcation situations and numerical simulationsof the corresponding dynamics of the converter are shown in Section 6. Conclusions are drawn in Section 7. Finally, AppendixA outlines basic elements of the theory of BQS systems.
2. Lyapunov-based control of a boost converter
The averaged model of the ideal DC–DC boost converter, depicted in Fig. 1, can be described by the dynamical system
PleaseNonlin
Ldids¼ E� uv ð1Þ
Cdvds¼ �v
Rþ ui ð2Þ
where i and v are, respectively, the inductor current and the capacitor voltage. E stands for the voltage source, while L is theinductance, C is the capacitance and R is the actual load value. Finally, u 2 ½0;1� is the control action.
Notice that the set of possible equilibrium points ðie;veÞ is given by the parabola
EP :¼ ðie;veÞ; ERie ¼ v2e
� �; ð3Þ
while the control input at the equilibrium is
ue ¼Eve: ð4Þ
Moreover, the restriction u 2 ½0;1� introduces a constraint in the equilibrium, namely, the so-called boost condition:
0 <Eve
< 1() ve
E> 1: ð5Þ
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 3
In the physical variables this means that jvej > jEj, that is, the resulting output voltage is boosted with regard to the inputvoltage source.
The incremental model computed with ei ¼ i� ie; ev ¼ v � ve, eu ¼ u� ue and using (3), (4) answers to
PleaseNonlin
Ldei
ds¼ � eu þ ueð Þev � veeu ð6Þ
Cdev
ds¼ eu þ ueð Þei �
ev
Rþ ieeu: ð7Þ
Let us consider as a Lyapunov function candidate the energy in the increment
eðeÞ ¼ 12
Le2i þ Ce2
v
� �; ð8Þ
where e> ¼ ðei; ev Þ. Differentiating eðeÞ with respect to time yields
deðeÞds¼ � e2
vRþ eu ieev � veeið Þ: ð9Þ
Hence, selecting the controller as
eu ¼ �c ieev � veeið Þ ¼ �c iev � veið Þ; c > 0; ð10Þ
eðeÞ becomes a Lyapunov function for the closed loop system and, consequently, the equilibrium point e ¼ 0 of (6), (7) is GAS.
Remark 1. The above discussion does not take into account the bounded character of the control action in practicalrealizations. Therefore, only local asymptotic stability might be claimed and, obviously, only for equilibria satisfying theboost condition (5). However, taking the boundedness of the control gain into account may result in an extremelycomplicated analysis due to the high degree of nonlinearity inherent to saturation phenomena. Hence, proceeding as usual inthe existing literature on power converters, in the sequel this feature is not considered. Notwithstanding, also in accordancewith the literature and whenever possible, hypotheses and/or restrictions that guarantee the fulfillment of the boostcondition by possible equilibria will be assumed and/or derived, respectively.
Assume now that the controller (10) is defined using nominal values, i.e. instead of ve; ie and ue we take, respectively, thedesired output voltage vn,
in ¼v2
n
ERnand un ¼
Evn;
Rn being a nominal load value and with E;vn; c 2 Rþ. Then, (10) yields
u ¼ un þ eu ¼Evn� c
v2n
ERnv � vni
� �ð11Þ
and the actual dynamics for (1), (2) obtained using the control input (11) results in the planar quadratic system
Ldids¼ E� E
vnv � cvniv þ cv2
n
ERnv2 ð12Þ
Cdvds¼ E
vni� 1
Rv � cv2
n
ERniv þ cvni2
: ð13Þ
The equilibrium points of (12), (13), ie;veð Þ, are those of the parabola EP defined in (3) with the equilibrium voltage ve
satisfying
v3e �
Rvn
Rnv2
e þE2Rcv2
nve �
E2Rcvn¼ 0: ð14Þ
Remark 2. Notice that (14) is a cubic equation with real coefficients. For R ¼ Rn, with Rn 2 Rþ, it is immediate that ve ¼ vn isthe unique real solution of (14) if and only if c 2 Rþ and, therefore, ie; veð Þ ¼ in;vnð Þ is the unique equilibrium of (12), (13).Otherwise, when R – Rn, the system exhibits a minimum of one and a maximum of three real equilibria, neither of whichcoincides with in;vnð Þ.
The aim of this paper is to show that the closed-loop dynamics of a Lyapunov-based controlled boost converter arebounded regardless of the actual value of the load, R, and also to carry out a bifurcation analysis using R and the gain ofthe control law, c, as bifurcation parameters. The main results of the analysis are outlined in next Section.
3. Global dynamics taxonomy: main results
Aiming at facilitating the analysis, let us first perform a change of variables and a time re-scaling that yields a dimension-less system with a minimum number of parameters:
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

4 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
PleaseNonlin
x1 ¼iin¼ ERn
v2n
i; x2 ¼vvn; t ¼ 1
CRns; k ¼ Rn
Rð15Þ
�x2 ¼Evn; k ¼
ffiffiffiCL
rERn
vn; a ¼ cv4
n
E2Rn
; ð16Þ
which transforms (12), (13) in
_x1 ¼ k2 1� x2 � ax1x2 þ ax22
ð17Þ
_x2 ¼ x1 � kx2 � ax1x2 þ ax21; ð18Þ
with _xi ¼ dxidt ; i ¼ 1;2, while the nominal output reference is x2n ¼ 1. In turn, the bifurcation parameters are now a and k.
The equilibrium points of (17), (18) are:
xe :¼ x1e; x2eð Þ; where x1e ¼ kx22e; ð19Þ
with x2e satisfying
p x2eð Þ ¼ x32e �
x22e
kþ x2e
ka� 1
ka¼ 0: ð20Þ
Let us now establish some physically meaningful assumptions. Notice, on the one hand, that the boost condition (5) ap-plied to the nominal case requires signðEÞ ¼ signðvnÞ; hence, it is no loss of generality to assume vn > E > 0 and, conse-quently, 0 < �x2 < 1. Moreover, as both R and Rn are resistances, it is R > 0, Rn > 0, this yielding k; k 2 Rþ. Finally, asfollows from Remark 2 and the Lyapunov-based control law (10), c > 0 ensures unicity and GAS of the equilibrium in thenominal case, which results in a > 0. Then:
Assumption A. One has that 0 < �x2 < 1, and also that k; k;a 2 Rþ.Under this hypothesis we can derive a first property of the equilibria of (17), (18):
Proposition 1. Let Assumption A be fulfilled. Then, all the equilibrium points of (17), (18) lie in Rþ � Rþ.
On the other hand, recalling Remark 1, it is reasonable to demand that at least one of the equilibria of (17), (18) satisfiesthe boost condition. A sufficient –and sometimes also necessary– condition for this purpose is set in next Proposition.
Proposition 2. Let Assumption A be fulfilled, and let us define
KB :¼ 0; k�ð Þ; with k� :¼ a�x22 � �x2 þ 1
a�x32
: ð21Þ
If k 2 KB, then at least one of the real equilibria of (17), (18) satisfies the boost condition x2e > �x2. Furthermore, if there exists oneand only one real equilibrium, the condition is also necessary.
Let us now state the BQS character of (17), (18):
Theorem 1. Let Assumption A be fulfilled. Then, (17), (18) is a BQS and it exhibits one, two or three equilibrium points.
Finally, the conditions under which (17), (18) is BQS1, BQS2 and BQS3 are collected below. The results use a set of param-eters defined in Section 4, namely x2em ; km in (27), x2eM ; kM in (28), x2ek1 ; x2ek2 in (29), (30), and x2e1 ; x2e2 in (35), (36).
Theorem 2. Let Assumption A be fulfilled. Then, system (17), (18) is BQS1 and the equilibrium point satisfies the boost conditioniff:
(i) a P 13 and k 2 KB. Then, the equilibrium component x2e is such that x2e 2 �x2;þ1ð Þ.
(ii) 14 < a < 1
3 and k 2 ð0; kmÞ [ ðkM; k�Þ. Then, the equilibrium component x2e is such that x2e 2 �x2; x2e1
[ x2e2 ;þ1
.(iii) 0 < a < 1
4 and k 2 kM ; k�ð Þ. Then, the equilibrium component x2e is such that x2e 2 �x2; x2e1
.
Moreover, in any of these cases the phase portrait is homeomorphic to Fig. A.8. Finally, the equilibrium is always a stablenode or a stable focus, except for the particular case a; kð Þ ¼ 1
3 ;19
, in which it is a stable node.
Remark 3. It follows immediately from Theorem 2. i that if one selects the control gain c in such a way that
13< a; i:e:
E2Rn
3v4n< c;
then system (17), (18) is always BQS1 regardless of the value of R. Furthermore, in accordance with Proposition 2, if the ac-tual load, R, is such that R > Rn
k� , then the equilibrium satisfies the boost condition.
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

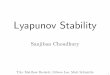
Fig. 2. Two-parameter bifurcation diagram. BQS1: blue; BQS2: black; BQS3: red. (For interpretation of the references to colour in this figure caption, thereader is referred to the web version of this article.)
M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 5
Theorem 3. Let Assumption A be fulfilled. Then, system (17), (18) is BQS2 and the equilibrium points satisfy the boost condition iff:
(i) 14 < a < 1
3 and either k ¼ kM or k ¼ km. Then, for k ¼ kM, the equilibrium components x2e are x2e ¼ x2e1 and x2e ¼ x2eM . Alter-natively, for k ¼ km, the equilibrium components x2e are x2e ¼ x2em and x2e ¼ x2e2 . The equilibria with x2e ¼ x2em;M are saddle-node bifurcation points, while the equilibria with x2e ¼ x2e1;2 are either nodes or foci.
(ii) 0 6 a < 14 and k ¼ kM. Then, the equilibrium components x2e are x2e ¼ x2e1 and x2e ¼ x2eM . The equilibrium with x2e ¼ x2eM is
a saddle-node, while the equilibrium with x2e ¼ x2e1 is either a node or a focus.
Moreover, the phase portrait of the system is homeomorphic to one of the configurations in:
(A) Fig. A.9(b)–(e) iff 0 < a < 13 and k ¼ kM;
(B) Fig. A.9(a) or (f) iff 14 < a < 1
3 and k ¼ km;
Theorem 4. Let Assumption A be fulfilled. Then, system (17), (18) is BQS3 and the equilibrium points satisfy the boost condition iff:
(i) 14 < a < 1
3 and k 2 km; kMð Þ. Then, the equilibrium components x2e ¼ xp2e; p ¼ 1;2;3, are such that, under a proper indexing,
0 < x12e < x2
2e < x32e, with x1
2e 2 x2e1 ; x2em
; x2
2e 2 x2em ; x2eM
and x3
2e 2 x2eM ; x2e2
.
(ii) 0 < a < 14 and k 2 kM ;þ1ð Þ. Then, the equilibrium components x2e ¼ xp
2e; p ¼ 1;2;3, are such that, under a proper indexing,0 < x1
2e < x22e < x3
2e, with x12e 2 x2e1 ; x2ek1
; x2
2e 2 x2ek2 ; x2eM
and x3
2e 2 x2eM ;þ1
.
The equilibrium with x2e ¼ x22e is a saddle, while the remaining equilibria are either nodes or foci. Moreover, the phase portrait of
the system is homeomorphic to one of the configurations in Fig. A.10.The bifurcation diagram is depicted in Fig. 2. The black lines, corresponding to k ¼ kmðaÞ and k ¼ kMðaÞ (see (27)), denote
the BQS2 curves, while the blue and red regions stand, respectively, for the BQS1 and BQS3 areas.
Remark 4. According to Theorems 3 and 4, the boost system exhibits two or three equilibria for a 2 0; 13
and k 6 kM .
Considering the definition of kM in (28), notice that
PleaseNonlin
dkM
da¼ 2þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
3 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �2 > 0; 8a 2 0;
13
� �:
It is then immediate that kM ¼ kMðaÞ is positive and increasing for all a 2 0; 13
. Hence,
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

6 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
PleaseNonlin
kM 6 kM13
� �¼ 1
9; 8a 2 0;
13
� �;
which, recalling the definition of k in (15), means that the boost does not exhibit two or three equilibria unless the real load,R, is at least 9 times the nominal load, Rn.
The final part of the Section is devoted to the existence of limit cycles in (17), (18) under Assumption A. Notice from The-orem 2 and Fig. A.8 that in the BQS1 case the answer is negative. However, in BQS2 and BQS3 systems the situation is not thatsimple because they exhibit homoclinic-loop bifurcation surfaces and, for the BQS3 case, also multiplicity-two limit-cyclebifurcation surfaces that require numerical investigation [27,28]. Nevertheless, the trace of the Jacobian of the flow associ-ated to (17), (18), evaluated at any of its critical points, xe ¼ x1e; x2eð Þ ¼ kx2
2e; x2e
(recall (19)), is given by
tr J xeð Þð Þ ¼ �k2ax2e � k� ax1e ¼ �kax22e � k2ax2e � k;
As k > 0 by Assumption A and x2e > 0 by Proposition 1, one finds out that tr J xeð Þð Þ – 0 at any rest point of (17), (18). Hence,J xeð Þ cannot possess a pair of purely imaginarium eigenvalues, which is a necessary condition for the existence of a Hopfbifurcation at xe [29]. Therefore, Hopf bifurcations do not occur and, therefore, the possibility of finding limit cycles in(17), (18) is considerably reduced:
Theorem 5. Let Assumption A be fulfilled. Then, Hopf bifurcations cannot occur at any rest point of (17), (18). h
4. Proof of the main results
Proof of Proposition 1. Assumption A indicates that x1e ¼ kx22e P 0. Hence, it remains to be proved that x2e > 0. To this
end, notice that by Assumption A,
pð0Þ ¼ � 1ka
< 0:
Moreover, defining pðzÞ from (20) it results that:
p0ðzÞ ¼ 0() z ¼ z1;2 ¼13k�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi13k
� �2
� 13ka
s;
with p0ð0Þ > 0, while z1;2 > 0 when they belong to R. As pðzÞ is a cubic polynomial with a positive coefficient for the highestorder term, it is pðzÞ < 0, for all z 2 ð�1;0�. This means that its real zero(es), x2e, is(are) in Rþ. h
Proof of Proposition 2. Under Assumption A, the translation of the boost condition (5) to the dimensionless variable x2e isstraightforward:
ve > E() x2evn > E() x2e >Evn¼ �x2:
Then,
p �x2ð Þ < 0() �x32 �
1k
�x22 þ
1� �x2
a
� �< 0() k < k�:
As we have that pðzÞ ! �1 for z! �1, it is immediate that pðzÞ has, at least, one real root, x2e, such that x2e > �x2.The necessity of the condition when there exists one and only one real equilibrium, x2e, satisfying the boost condition
stems from the fact that, in such a case, the behavior of pðzÞ as z! �1 indicates that x2e > �x2 ) p �x2ð Þ < 0, and it has alreadybeen proved that p �x2ð Þ < 0) k 2 KB. h
4.1. Proof of Theorem 1
Lemma 1. Let x2e be a real solution of (20). The linear mapping x ¼ Qyþ xe, with x> ¼ ðx1; x2Þ; y> ¼ ðy1; y2Þ and
Q ¼ 1
ak 1þ k2� � k k2
k �1
!
transforms (17), (18) into a system of the form (A.1), with c ¼ 0 and
a11 ¼ �kk2
1þ k2 ; a12 ¼ �a11
kþ k
2x2e� 1
� �;
a21 ¼ �a11
k� k
x2e; a22 ¼
a11
k2 � ax2e k2 þ kx2e
� �:
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 7
Proof. System (17), (18) can be written as
PleaseNonlin
_x ¼ Mxþ N þ f ðxÞ; ð22Þ
with
M ¼ 0 �k2
1 k
!; N ¼ k2
0
!; f ðxÞ ¼
x>T1x
x>T2x
� �;
where
T1 ¼ k2a0 � 1
2
� 12 1
!; T2 ¼ a
1 � 12
� 12 0
!:
As Q is trivially nonsingular one has that y ¼ Q�1 x� xeð Þ and, using (22),
_y ¼ Q�1 _x ¼ Q�1 Mxþ f ðxÞð Þ ¼ Q�1 MQyþMxe þ N þ f Qyþ xeð Þð Þ: ð23Þ
Now, as xe is an equilibrium point of (22), it happens that
Mxe þ N þ f xeð Þ ¼ 0) Mxe þ N ¼ �f xeð Þ;
and (23) becomes:
_y ¼ Q�1MQyþ Q�1 f Qyþ xeð Þ � f xeð Þð Þ ¼ Q�1MQyþ Q�1 y>Q>T1Qyþ 2x>e T1Qy
y>Q>T2Qyþ 2x>e T2Qy
!: ð24Þ
The result follows replacing Q ;M; T1; T2 in (24) by its above defined expressions and using (19), (20) for the coordinates ofthe equilibrium, x2e. h
Hence, Lemma 1 ensures the existence of an affine transformation that converts (17), (18) into a system of the form (A.1),
with c ¼ 0 and a11 ¼ � kk2
1þk2. Moreover, Assumption A ensures that a11 < 0. Therefore, the BQS character follows immediately
from Theorem 1 in Appendix A. In turn, the number of equilibria coincides with the number of real roots of the cubic Eq. (20),which is trivially between one and three.
4.2. Proof of Theorems 2–4
Let us first set the basic ideas that are to be used. The problem to be solved is the control of the solutions of (20) for po-sitive values of the bifurcation prameters ða; kÞ. Notice that the value of k at the equilibria components x2e may be obtainedwith the mapping k : Rþ ! R that results from the isolation of k in (20). This allows to investigate the roots of (20) for ða; kÞthrough the antiimages of k x2eð Þ.
The expressions of k x2eð Þ and of its derivative with respect to x2e are:
k x2eð Þ ¼ ax22e � x2e þ 1
ax32e
; ð25Þ
k0 x2eð Þ ¼ �ax22e � 2x2e þ 3
ax42e
: ð26Þ
It is known from Proposition 1 that x2e 2 Rþ. It is immediate that, for all x2e 2 Rþ; k x2eð Þ is continuous and such that
limx2e!0þ
k x2eð Þ ¼ þ1; limx2e!þ1
k x2eð Þ ¼ 0þ;
limx2e!0þ
k0 x2eð Þ < 0; limx2e!þ1
k0 x2eð Þ < 0:
Moreover, for all a P 13 ; k x2eð Þ is positive and decreasing, while for all a 2 1
4 ;13
it is still positive but it shows two local ex-
trema, namely, a minimum and a maximum, with coordinates:
x2em ; kmð Þ :¼ 31þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap ;
1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
1� 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
9 1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
0@ 1A; ð27Þ
x2eM ; kM
:¼ 31�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap ;
1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
1þ 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
9 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
0@ 1A: ð28Þ
Finally, for all a 2 0; 14
; k x2eð Þ becomes negative in x2ek1 ; x2ek2
, with
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

8 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
PleaseNonlin
x2ek1 :¼ 1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 4ap
2a¼ 2
1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 4ap ; ð29Þ
x2ek2 :¼ 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 4ap
2a¼ 2
1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 4ap ; ð30Þ
it also keeps the local extrema obtained in (27), (28) obviously with km < 0 and kM > 0.Let us now compute the critical parameters quoted in Theorem 7 of Appendix A for the determination of the type and
possible phase portraits of BQS systems, namely b; d and b2 � 4d. Their expressions in terms of x2e follow using (A.2),(A.3), Lemma 1 and (25):
b ¼ 3� x2e
x2ek; ð31Þ
d ¼ ax22e � 2x2e þ 3
x22e
k2; ð32Þ
b2 � 4d ¼ ð1� 4aÞx22e þ 2x2e � 3x2
2e
k2: ð33Þ
Hence, the sign of b2 � 4d is determined by that of the numerator of (33):
q x2eð Þ :¼ ð1� 4aÞx22e þ 2x2e � 3: ð34Þ
It is trivial that q x2eð Þ is an inverted parabola with no zeros for a > 13. When 1
4 < a 6 13 the parabola is still inverted and its
zeros are positive:
x2e1 :¼ 1� 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
4a� 1¼ 3
1þ 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap ; ð35Þ
x2e2 :¼ 1þ 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
4a� 1¼ 3
1� 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap : ð36Þ
For 0 < a < 14 the parabola is regular and it has only one zero in Rþ, namely, x2e1 . The specific case b ¼ d ¼ 0 is attained when
x2e ¼ 3;a ¼ 13, which yield k ¼ 1
9; alternatively, b – 0; d ¼ 0 arises when 0 < a < 13 ; k ¼ kM , and 1
4 < a < 13 ; k ¼ km, which assure
x2e – 3 in both cases.It is worth pointing out that the images of x2e1;2 by the mapping k x2eð Þ defined in (25) are:
k x2e1;2
� �¼
1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
1� 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
9 1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� � : ð37Þ
Notice from 27,28 that k x2e1;2
� �¼ kM;m, which is crucial for the obtention of the regions where the roots of (20) are located.
Next Lemma follows immediately from the preceding discussion:
Lemma 2. Let Assumption A be fulfilled. Then, Eq. (20) has:
(i) A single real root in Rþ iff:(i.a) a P 1
3, with x2e 2 0;þ1ð Þ;(i.b) 1
4 < a < 13 and either k 2 0; kmð Þ, with x2e 2 x2e2 ;þ1
, or k 2 kM ;þ1ð Þ, with x2e 2 0; x2e1
;
(i.c) 0 < a < 14 and k 2 kM;þ1ð Þ, with x2e 2 0; x2e1
;
(ii) Two different real roots in Rþ iff:(ii.a) 1
4 < a < 13 and either k ¼ km, with x2e ¼ x2em and x2e ¼ x2e2 , or k ¼ kM, with x2e ¼ x2e1 and x2e ¼ x2eM ;
(ii.b) 0 < a < 14 and k ¼ kM, with x2e ¼ x2e1 and x2e ¼ x2eM ;
(iii) Three different real roots, xp2e; p ¼ 1;2;3, where 0 < x1
2e < x22e < x3
2e, iff:(iii.a) 1
4 < a < 13 and k 2 km; kMð Þ, with x1
2e 2 x2e1 ; x2em
; x2
2e 2 x2em ; x2eM
, and x3
2e 2 x2eM ; x2e2
;
(iii.b) 0 < a < 14 and k 2 0; kMð Þ, with x1
2e 2 x2e1 ; x2ek1
� �; x2
2e 2 x2ek2; x2eM
� �, and x3
2e 2 x2eM ; x2e2
. h
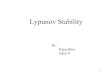
Fig. 3 illustrates the situation with the plot of kðx2eÞ for a ¼ 1130 ;a ¼ 7
24, and a ¼ 1775 which belong, respectively, to the char-
acteristic regions a P 13 ;
14 < a < 1
3, and 0 < a < 14. Notice that, in the first case (red line), k x2eð Þ is invertible for all
x2e 2 ð0;þ1Þ, which indicates that (20) has a single real root. Instead, in the second case (blue line), k x2eð Þ cannot be invertedwhen k takes values between its minimum, km, and its maximum, kM: for k ¼ km and k ¼ kM there exists two antiimages, i.e.(20) exhibits two real roots, while for any k 2 ðkm; kMÞ there exist three antiimages, i.e. (20) has three real roots; conversely,for k 2 ð0; kmÞ [ ðkM ;þ1Þ the mapping is invertible and, therefore, (20) shows a single real root therein. Finally, in the thirdcase (black line), k x2eð Þ has three antiimages for k 2 ð0; kMÞ, two antiimages for k ¼ kM , and one antiimage for k 2 ðkM;þ1Þ, i.e.(20) has three, two and one real root in each zone, respectively.
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

Fig. 3. kðx2eÞ for a ¼ 1130 >
13 (red), 1
4 < a ¼ 724 <
13 (blue), and 0 < a ¼ 17
75 <14 (black). (For interpretation of the references to colour in this figure caption, the
reader is referred to the web version of this article.)
M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 9
Finally, recall from Proposition 2 that k 2 0; k�ð Þ ¼ KB ensures the fulfillment of the boost condition. Next result states thatit is always possible to select k 2 KB in such a way that (20) has either one, two or three roots.
Lemma 3. Let Assumption A be fulfilled, and let K denote a maximal interval for k in which (20) has either one, two or threeequilibria. Then, K \KB – ;.
Proof. It follows from Lemma 2 and Eq. (37) that:
(i) When a P 13, (20) has one real root for k 2 K ¼ ð0;þ1Þ;
(ii) When 14 < a < 1
3, (20) has one real root for k 2 K ¼ ð0; kmÞ [ ðkM ;þ1Þ; two different real roots for k ¼ K ¼ kM ork ¼ K ¼ km, and three different real roots for k 2 K ¼ ðkm; kMÞ;
(iii) For 0 < a < 14, (20) has one real root for k 2 K ¼ ðkM;þ1Þ; two different real roots for k ¼ K ¼ kM , and three different
real roots for k 2 K ¼ ð0; kMÞ.
As KB ¼ ð0; k�Þ, with k� defined in (21), it suffices to prove that kM < k� for 0 < a < 13:
PleaseNonlin
kM ¼1�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
1þ 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
9 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� � <
1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
1þ 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
9 1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� � ¼ 1þ 2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
9<
13< 1; ð38Þ
moreover, by Assumption A,
k� ¼ a�x22 � �x2 þ 1
a�x32
>a�x2
2
a�x32
¼ 1�x2> 1;
and the result follows. h
Proof of Theorem 2. On the one hand, the BQS1 characterization under Assumption A follows immediately fromLemma 2.
On the other hand, notice from Lemma 1 that c ¼ 0; a11 < 0 and a11 þ a22 < 0, because k > 0 and a > 0 by Assumption A,while one has x2e > 0 in accordance with Proposition 1. Hence, Theorem 8 in Appendix A ensures that the correspondingphase portraits are homeomorphic to Fig. A.8. The homeomorphism is due to the fact that the transformation Q in Lemma1 is not orientation-preserving, because the determinant of its linear part is negative under the stated hypotheses.
Finally, recall that the situations (i–iii) are associated with b2 � 4d < 0, except when a; kð Þ ¼ 13 ;
19
, which yields x2e ¼ 3:
indeed, with these settings (20) becomes
p x2eð Þ ¼ x32e � 9x2
2e þ 27x2e � 27 ¼ x2e � 3ð Þ3 ¼ 0:
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

10 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
Recall also that this last case is associated with b ¼ d ¼ 0, because it follows from (31), (32) as previously discussed; hence,the character of the equilibrium claimed in the second part of the statement of Theorem 2 is again a straightforward con-sequence of Theorem 8. h
Remark 5. The proof of the BQS1 character of system (17), (18) carried out above also follows imposing that the cubic Eq.(20) has a unique solution, which can be shown using Cardano’s approach for the calculation of the roots of a 3rd degreepolynomial, and then analyzing the stability of the corresponding equilibrium through its linear approximation [30].However, this does not shorten the proof and, in any case, does not allow to prove the bounded character in case of two orthree equilibria.
Proof of Theorem 3. As in the preceding case, the BQS2 character stems immediately from Lemma 2.The type of equilibria and the possible phase portrait configurations are governed by Theorem 9 in Appendix A. There, the
system is first required to have c ¼ 0; a11 < 0; a11 þ a22 – 0 and a21 < 0, also with d ¼ 0. Notice from Theorem 1 that the firsttwo conditions are fulfilled, while it has already been discussed in the proof of Theorem 2 that a11 þ a22 < 0. Let us prove theremaining ones.
Regarding d ¼ 0, notice from (26) and (32) that
PleaseNonlin
d ¼ �ax22ek0 x2eð Þ: ð39Þ
Hence, d ¼ 0 when x2e 2 Rþ is indeed achieved for x2e; kð Þ ¼ x2em ; kmð Þ and for x2e; kð Þ ¼ x2eM ; kM
. As commented in AppendixA, it is no loss of generality to assume d ¼ 0 in the BQS2 case, otherwise a change of origin to the second rest point yields anequivalent system with d ¼ 0. Therefore, we will set x2e ¼ x2em when k ¼ km and x2e ¼ x2eM when k ¼ kM in the transformationestablished in Theorem 1 and, consequently, in the resulting coefficients aij. In turn, in each case the corresponding equilibriaare transferred to the origin of the transformed system and, according to Theorem 9, they are saddle-node bifurcation points,while the remaining equilibria, namely, those with x2e ¼ x2e1;2 , are either nodes or foci.
The proof of a21 < 0 in both cases is as follows:
a21 ¼ �a11
k� k
x2e¼ km;Mk
1þ k2 �k
x2em;M
¼k km;Mx2em;M � 1þ k2
� �h ix2em;M 1þ k2
� � ¼k kMx2eM � 1
x2em;M 1þ k2� � ;
with
kMx2eM � 1 ¼ 31�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap �
1�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
1þ 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� �
9 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� � � 1 ¼ �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
3 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap� � < 0: ð40Þ
Hence, a21 < 0 for 0 < a < 13 in the BQS2 case. Notice that, again, we refer to homeomorphic configurations rather than to 0-
homeomorphic configurations due to the already discussed lack of preservation of orientation inherent to transformation Qin Lemma 1.
Finally, also in accordance with Theorem 9, the configuration of (17), (18) depends on the sign of b, which was defined in(31):
bA;B ¼3� x2eM;m
x2eM;m
k ¼ k3
x2eM;m
� 1
!¼ k 1�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
� 1� �
¼ �kffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 3ap
: ð41Þ
It is straightforward that in case (A) we have bA < 0 and the configuration is homeomorphic to Fig. A.9(b)–(e), while in case(B) it is bB > 0 and the configuration is homeomorphic to Fig. A.9(a) or (f). h
Proof of Theorem 4. Once more as in the preceding cases, the BQS3 character arises from Lemma 2.As regards the equilibria type and the phase portraits, governed by Theorem 10 in Appendix A, the determination requires
c ¼ 0; a11 < 0; a21 < 0, and d < 0. Again, it is immediate from Theorem 1 that the transformed system exhibits c ¼ 0; a11 < 0.As of d < 0, and also in parallel with the preceding result, it is no loss of generality to assume this feature. The first part of
Theorem 4 establishes that the BQS3 character appears in two regions of the plane a; kð Þ, defined in items (i)-(ii), and in everycase the three equilibria x2e lie in three different intervals. According to (39), d < 0 is achieved when the mapping k isincreasing, that is, for x2e ¼ x2
2e 2 x2em ; x2eM
when 1
4 < a < 13 or x2e ¼ x2
2e 2 x2ek2 ; x2eM
when 0 < a < 1
4. Then, d < 0 will be en-sured setting x2e ¼ x2
2e in the transformation derived in Theorem 1 which, in turn, indicates that the equilibrium withx2e ¼ x2
2e is a saddle, while the remaining equilibria are either nodes or foci.
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

Fig. 4. Case 14 < a < 1
3: evolution of x2e as a function of k for a ¼ 724. BQS1: blue; BQS2: black; BQS3: red. (For interpretation of the references to colour in this
figure caption, the reader is referred to the web version of this article.)
Fig. 5. Case 0 < a < 14: evolution of x2e as a function of k for a ¼ 17
75. BQS1: blue; BQS2: black; BQS3: red. (For interpretation of the references to colour in thisfigure caption, the reader is referred to the web version of this article.)
M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 11
Let us finally prove that a21 < 0:
PleaseNonlin
a21 ¼ �a11
k� k
x2e¼ kk
1þ k2 �k
x2e¼
k kx2e � 1þ k2� �h i
x2e 1þ k2� � ¼6
k kMx2eM � 1 x2e 1þ k2� � < 0 ð42Þ
because of (40).Again, as happened with the BQS1 and BQS2 cases, we refer to homeomorphic configurations due to the non preservation
of the orientation exhibited by the transformation in Theorem 1. h
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

12 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
5. Bifurcation scenarios
The different bifurcation situations that arise in system (17), (18) from the variation of the parameters a and k are de-scribed in this section. The discussion is entirely based on the results established in Theorems 2–4, and it also takes advan-tage of some of the ideas used in their proofs, carried out in the preceding section. It is worth recalling that no Hopfbifurcations are encountered, all the bifurcations being of the saddle-node type.
i) When a P 13, (17), (18) is BQS1 for any k > 0. The equilibrium component x2e belongs to ð0;þ1Þ and is such that x2e
tends to 1 when k tends to 0þ and, conversely, x2e tends to 0þ when k tends to þ1.ii) When 1
4 < a < 13, (17), (18) is BQS1 for any k 2 0; kmð Þ, with the component x2e of the unique equilibrium decreasing
from þ1 to x2e2 as k grows. Then, for k ¼ km a second equilibrium with x2e ¼ x2em and corresponding to a saddle-nodearises and (17), (18) becomes BQS2. A further increase of k, and up to kM , sees the appearance of the BQS3 character of(17), (18) due to the bifurcation of the saddle-node into two equilibria: the first one with x2e ¼ x1
2e that decreasestowards x2e1 , and the second one with x2e ¼ x2
2e growing towards x2eM . In turn, the one with x2e ¼ x32e continues decreas-
ing also towards x2eM . For k ¼ kM the equilibriums with x2e ¼ x22e and x2e ¼ x3
2e annihilate in a single saddle-node equi-librium with x2e ¼ x2eM , (17), (18) thus becoming again BQS2: the remaining equilibrium shows x2e ¼ x2e1 . Finally, as kkeeps growing to þ1 only this last equilibrium survives because the degenerate rest point disappears; (17), (18)returns to the original BQS1 condition and the equilibrium component x2e tends to 0þ as k tends to infinity.Fig. 4 illustrates the situation by depicting x2e as a function of k for a ¼ 7
24. The coordinates of the equilibria in the BQS2situations are highlighted.
iii) When 0 < a < 14 and k 2 0; kMð Þ, (17), (18) is BQS3. The equilibrium with x2e ¼ x1
2e tends to x2ek1 as k tends to 0þ anddecreases towards x2e1 as k grows to kM; the equilibrium with x2e ¼ x2
2e tends to x2ek2 as k tends to 0þ and growstowards x2eM as k grows to kM; finally, the equilibrium with x2e ¼ x3
2e tends to þ1 as k tends to 0þ and decreases alsotowards x2eM as k grows to kM . Then, for k ¼ kM the equilibriums with x2e ¼ x2
2e and x2e ¼ x32e melt in a saddle-node with
x2e ¼ x2eM and (17), (18) becomes BQS2, with the remaining equilibrium showing x2e ¼ x2e1 . A further increase of kyields the annihilation of the saddle-node and only an equilibrium survives, which means that (17), (18) is BQS1;as k tends to þ1 one finds out that x2e tends to 0þ.Fig. 5 shows x2e as a function of k for a ¼ 17
75. The coordinates of the equilibria in the BQS2 situation are againhighlighted.
6. Numerical results
The numerical simulations have been obtained with the following values for the converter parameters:E ¼ 10 V; L ¼ 100 lH; C ¼ 10 lF;vn ¼ 15 V and Rn ¼ 10 X.
The first set of results, collected in Fig. 6, illustrate the different scenarios for 14 < a < 1
3, namely with a ¼ 724, achieved set-
ting c ¼ 71215. In this case Theorems 2.ii, 3.i and 4.i ensure that (12), (13) is:
(a) BQS1 if R 2 R�;R1ð Þ [ ðR2;þ1Þ, i.e.(b) BQS2 if R ¼ R1 or R ¼ R2,(c) BQS3 if R 2 R1;R2ð Þ,
where
PleaseNonlin
R� ¼ 10k�¼ 28
15¼ 1:8b6X; R1;2 ¼
10kM;m
¼90 10�
ffiffiffi2p� �
7
110:389X
146:754X:
�
and with at least one of the equilibria satisfying the boost condition. The features of the different phase portraits are col-lected in Table 1, including its homeomorphic model. The obtained results are in accordance with the theoretical analysisreported in Section 3.
The second set of results reproduce the situation corresponding to Fig. 6(f), that is, for R ¼ 130X, obtained not with anaveraged model but with a switched model implemented through the power electronics simulation software PSIM. Onthe one hand, Fig. 7(a), (c) and (e) consider the ideal situation in which the circuit elements have no losses and the switchingfrequency is unrealistically high: the existence of the two stable equilibria P1 and P3 is a fact, while the location of the saddlepoint P2 is inferred from the behavior of nearby solutions. Notice that, in any case, the coordinates of the equilibria coincidewith those in Fig. 6(f). On the other hand, Fig. 7(b), (d) and (f) show more realistic simulations: specifically, the switchingfrequency was set to 300 kHz, while the inductor and capacitor circuit elements included loss resistances of 0.3 X and0.1 X, respectively. It is worth remarking that, although the position of the equilibria differs slightly from the ideal casedue to the effect of the loses and the switching frequency, the qualitative behavior is the same.
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

−100 −80 −60 −40 −20 0 20 40 60 80 100
−300
−200
−100
0
100
200
300
i
P1
−100 −80 −60 −40 −20 0 20 40 60 80 100
−300
−200
−100
0
100
200
300
i
P1
−100 −80 −60 −40 −20 0 20 40 60 80 100
−300
−200
−100
0
100
200
300
i
P1
−50 −40 −30 −20 −10 0 10 20 30 40 50
−150
−100
−50
0
50
100
150
i
P1
P2
−40 −30 −20 −10 0 10 20 30 40
−100
−80
−60
−40
−20
0
20
40
60
80
100
i
P1
P2
P3
−50 −40 −30 −20 −10 0 10 20 30 40 50
−150
−100
−50
0
50
100
150
i
P1
P2
P3
−50 −40 −30 −20 −10 0 10 20 30 40 50
−150
−100
−50
0
50
100
150
i
P1
P2
−100 −80 −60 −40 −20 0 20 40 60 80 100
−300
−200
−100
0
100
200
300
i
P1
Fig. 6. Case 14 < a < 1
3 : a ¼ 724 (c ¼ 7
1215). State space plots for different values of R: separatrices (green) and trajectories (blue). (For interpretation of thereferences to colour in this figure caption, the reader is referred to the web version of this article.)
M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 13
Please cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. CommunNonlinear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

Table 1Features of the phase portraits in Fig. 6. S: saddle; SA-NO: saddle-node; SF: stable focus; SN: stable node.
Figure R P1 P2 P3 BQS Homeom. to Fig.
6a 1 X SN – – BQS1 86b 10 X SF – – BQS1 86c 100 X SN – – BQS1 86d 110.389 X SN SA-NO – BQS2 9(b)6e 111 X SN S SN BQS3 10(a)6f 130 X SN S SN BQS3 10(a)6g 146.754 X SA-NO SN – BQS2 9(a)6h 200 X SN – – BQS1 8
0 2 4 6 8 10 1220
40
60
80
100
120
140
P1
P2
P3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.520
30
40
50
60
70
80
P1
P2
P3
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
2
4
6
8
10
12
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.050
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
0 0.005 0.01 0.015 0.02 0.025 0.03 0.03520
40
60
80
100
120
140
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.0520
30
40
50
60
70
80
Fig. 7. R ¼ 130X: ideal and realistic simulations obtained with a switched model of the converter.
14 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
Please cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. CommunNonlinear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 15
7. Conclusions
In this paper we performed a bifurcation analysis of a Lyapunov-based controlled boost converter assuming that it under-goes load changes and that no control action is taken to compensate for the disturbance. The study considered the actual loadvalue and the gain of the control action as bifurcation parameters and took advantage of the fact that the closed-loop systemis planar and quadratic. Specifically, it was proved that, independently of the initial condition, all state trajectories arebounded, i.e. that it is a BQS. The BQS character was useful not only for obtaining global stability results on the dynamicbehavior of the converter, but also allowed us to apply BQS theory to carry out the bifurcation analysis.
The obtained results reported that the system can exhibit one, two or three equilibrium points, i.e., can be BQS1, BQS2 orBQS3. The different bifurcation scenarios, including the possible phase portraits, were characterized in terms of the bifurca-tion parameters. It is remarkable that the obtention of the bifurcation diagrams was relatively simple, because it is essen-tially based on the control of the roots of a cubic equation which, in turn, requires analysis of the sign of several parabolas.
The analysis also allowed the numerical illustration of the bifurcation phenomena inherent to BQS systems by means of aphysical example borrowed from power electronics. The set of numerical results was completed with realistic simulationsobtained with a switched model of the converter that were in qualitative agreement with the behavior showed by the aver-aged model.
Acknowledgement
This work has been supported by the spanish Ministerio de Educación (MEC) under projects DPI2010-15110 (D. Biel, E.Fossas and J.M. Olm), DPI2009-14713-C03-03 (D. Biel), and DPI2008-01408 (E.Fossas).
Appendix A. Bounded quadratic systems
The mathematical background of this appendix contains results directly extracted or straightforwardly obtainable from[27,31,28].
Definition 1. A BQS is a planar quadratic system of the form
PleaseNonlin
_y ¼ Ayþ Bþy>B1y
y>B2y
� �;
with y;B 2 R2 and A;B1;B2 2 M2 Rð Þ, that has all its trajectories bounded for t P 0. A BQS with one, two or three critical pointsis denoted as BQS1, BQS2 and BQS3, respectively, and a BQS with a continuum of critical points is denoted as BQS0.
Theorem 6 [27, Theorem 2.12]. A planar quadratic system affinely equivalent to
_y1 ¼ a11y1 þ a12y2 þ y22
_y2 ¼ a21y1 þ a22y2 � y1y2 þ cy22
ðA:1Þ
with jcj < 2 and either (i) a11 < 0, (ii) a11 ¼ a21 ¼ 0, or (iii) a11 ¼ 0; a21 – 0; a12 þ a21 ¼ 0, and ca21 þ a22 6 0, is a BQS. h
Let us now define
b ¼ a12 � a21 þ ca11; ðA:2Þd ¼ a11a22 � a12a21: ðA:3Þ
Theorem 7. Let a planar quadratic system be affinely equivalent to (A.1), with jcj < 2 and a11 < 0. Then, the system is:
(i) BQS1 iff either b2 � 4d < 0 or b ¼ d ¼ 0;(ii) BQS2 iff b – 0 and either b2 � 4d ¼ 0 or d ¼ 0;
(iii) BQS3 iff d – 0 and b2 � 4d > 0.
Proof. On the one hand, Theorem 1 guarantees that, under the stated hypotheses, the planar quadratic system is, indeed, aBQS. On the other hand, as a11 < 0 by assumption, Lemma 8 in [31] ensures that (A.1) has one, two or three equilibriumpoints iff the restrictions in (i), (ii) and (iii), respectively, are satisfied. Notice that this, indeed, follows easily from the factthat, with a11 < 0, the equilibrium value for y2, say y2e, satisfies the relation
y2e y22e þ by2e þ d
¼ 0:
h
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

Fig. A.8. Phase portrait of a BQS1 system affinely equivalent to (A.1), with c ¼ 0; a11 < 0, and a11 þ a22 < 0.
16 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
Remark 6. It follows immediately from Theorem 7 that the BQS2 case is non generic.The possible phase portraits when a system is BQS1, BQS2 or BQS3 are established in the next results. However, as already
mentioned in Section 3, the BQS2 and BQS3 configurations cannot be classified by means of algebraic inequalities on thecoefficients because in both cases there exist homoclinic-loop bifurcation surfaces and, for the BQS3 case, multiplicity-two limit-cycle bifurcation surfaces as well, which have to be numerically investigated [27,28]. For this reason, the theoret-ical analysis of the possible separatrix configurations reported in Section 4 when the boost system is BQS2 or BQS3 follows[31], which yields a classification that can be established in terms of algebraic inequalities but, in turn, is less detailed be-cause the possible existence of limit cycles around each isolated point is not disclosed. This is shown in the phase portraits bymeans of the symbols ! and : the first one indicates the existence of either a stable node or focus, or a stable orunstable focus on the interior of an externally stable limit cycle; the second symbol is equivalently defined, with the wordsstable and unstable being interchanged [31].
Theorem 8. ([27,31]) Let a planar quadratic system affinely equivalent to (A.1), with c ¼ 0 and a11 < 0, be a BQS1 system. Then,its phase portrait is given by Fig. A.8. Furthermore,
(i) if b2 � 4d < 0 then the equilibrium is a stable node or a stable focus;(ii) if b ¼ d ¼ 0 then the equilibrium is a stable node.
Proof. It follows from the stated hypotheses and Theorem 7 that either b2 � 4d < 0 or b ¼ d ¼ 0, in both cases witha11 þ a22 < 0. Then, Theorem 2.14 (c)-(ii) and (c)-(iii) in [27] ensure that the phase portrait is the one in Fig. A.8. The differentcharacter of the equilibrium point established in items (i)–(ii) arises straightforward from [31] (pp. 267). h
Let us now determine the possible phase portraits in the BQS2 case. Recall from Theorem 7 that a BQS system of the form(A.1) has two equilibria iff b – 0 and either b2 � 4d ¼ 0 or d ¼ 0. The next result assumes that: (a) d ¼ 0, since if d – 0 andb2 � 4d ¼ 0, changing the origin to the second equilibrium yields a new BQS system that matches (A.1) with d ¼ 0 [31,28];(b) a21 < 0, since if a21 > 0, the change of variables ðy1; y2Þ ! ðy1;�y2Þ transforms (A.1) into another BQS system with a21 < 0,while d is left invariant. However, this transformation is not orientation-preserving. Hence, following [31], we use the term0-homeomorphism for orientation-preserving homeomorphisms.
Theorem 9. Let a planar quadratic system affinely equivalent to (A.1), with c ¼ 0; a11 < 0; a21 < 0 and a11 þ a22 – 0, be a BQS2system with d ¼ 0. Then, the critical points of the system are
PleaseNonlin
P02 :¼ ð0;0Þ and Pþ2 :¼ a21b
a11;�b
� �;
with P02 being a saddle-node and Pþ2 being a node or a focus. Moreover:
(i) If b < 0, its phase portrait is 0-homeomorphic to one of the configurations shown in Fig. A.9(b)–(e).(ii) If b > 0, its phase portrait is 0-homeomorphic to one of the configurations shown in Fig. A.9(a) or A.9(f).
Proof. The result follows from Lemma 12 in [31] and Lemma 2.16 in [27]. h
The possible phase portraits of a BQS3 system are established below under the assumption that d < 0. This is because,from Theorem 7, a BQS system of the form (A.1) has three equilibria iff d – 0 and b2 � 4d > 0. Moreover, it is proved in[31] that one of the rest points is a saddle, and also that d < 0 iff the saddle is at the origin. Hence, if d > 0 one just hasto translate the origin to the saddle rest point of (A.1), this yielding another BQS3 system with a corresponding d < 0, whilea11 is left invariant [31]. Furthermore, in accordance with the procedure followed for the BQS2 case and due to identical rea-sons, it is again assumed that a21 < 0.
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

Fig. A.9. Phase portraits of a BQS2 system affinely equivalent to (A.1), with c ¼ 0; a11 < 0; a21 < 0, and d ¼ 0.
Fig. A.10. Phase portraits of a BQS3 system affinely equivalent to (A.1), with c ¼ 0; a11 < 0; a21 < 0, and d < 0.
M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx 17
Theorem 10. Let a planar quadratic system affinely equivalent to (A.1), with c ¼ 0; a11 < 0 and a21 < 0, be a BQS3 system withd < 0. Then, the critical points of the system are P0
3 :¼ ð0;0Þ and
PleaseNonlin
P�3 :¼ �a12 þ p�32
p�32
a11;p�32
� �; with p�32 ¼
�b�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2 � 4d
p2
;
P03 is a saddle and P�3 are either nodes or foci. Moreover, its phase portrait is 0-homeomorphic to one of the configurations shown in
Fig. A.10.
Proof. The result follows straightforward from Lemmas 8 and 10 in [31]. h
Remark 7. Fig. A.10 has been portrayed under the previously indicated criterium with regard to the possible existence oflimit cycles around the equilibria. However, differently from the BQS1 and BQS2 cases, now an equilibrium point can be sur-rounded by more than one limit cycle. In such a case, the external stable/unstable character is to be considered for the out-ermost limit cycle. It is also worth remarking that, as advanced early in this appendix, the research carried out in [27,28]yields a more detailed classification of the possible phase portraits of BQS2 and BQS3 systems with regard to the existenceof limit cycles, the cost being that it requires numerical treatment. Notice, finally, that the phase portraits reported thereinfor BQS3 systems are derived under the conjecture that any BQS3 system has, at most, two limit cycles.
cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. Communear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018

18 M. Spinetti-Rivera et al. / Commun Nonlinear Sci Numer Simulat xxx (2013) xxx–xxx
References
[1] Sanders S, Verghese G. Lyapunov-based control for switched power converters. IEEE Trans Power Electron 1992;7(1):17–24.[2] Bodson M, Chiasson J. Differential-geometric methods for control of electric motors. Int J Robust Nonlinear Control 1998;8(11):923–54.[3] Leyva R, Cid-Pastor A, Alonso C, Queinnec I, Tarbouriech S, Martı́nez-Salamero L. Passivity-based integral control of a boost converter for large-signal
stability. IEE Proc Control Theory Appl 2006;153(2):139–46.[4] Sira-Ramírez H, Spinetti M, Fossas E. An algebraic parameter estimation approach to the adaptive observer-controller based regulation of the boost
converter. In: Proc. of the IEEE international symposium on industrial electronics; 2007. p. 3367–3372.[5] Jayawardhana B, Weis G. Tracking and disturbance rejection for passive nonlinear systems. In: Proc. of the 44th IEEE conference on decision and
control and european control conference; 2005. p. 3333–3338[6] Jayawardhana B, Ortega R, García Canseco E, Castaños F. Passivity of nonlinear incremental systems: application to PI stabilization of nonlinear RLC
circuits. In: Proc. of the 45th IEEE conference on decision and control; 2006. p. 3808–3812[7] Venkataramanan R, Sabanovic A, Cuk S. Sliding mode control of DC-to-DC converters. In: Proc. of the 11th annual conference of the ieee industrial
electronics society; 1985. p. 251–258[8] Sira-Ramı́rez H, Ilic-Spong M. Exact linearization in switched mode DC-to-DC power converters. Int J Control 1989;50(2):511–24.[9] Rodrı́guez H, Ortega R, Escobar G, Barabanov N. A robustly stable output feedback saturated controller for the boost DC-to-DC converter. Syst Control
Lett 2000;40(1):1–6.[10] Sira-Ramı́rez H, Silva-Ortigoza R. Control design techniques in power electronics devices. London: Springer-Verlag; 2006.[11] Tan FD, Ramshaw RS. Instabilities of a boost converter system under large parameter variations. IEEE Trans Power Electron 1989;4(4):442–9.[12] Banerjee S, Chakrabarty K. Nonlinear modeling and bifurcations in the boost converter. IEEE Trans Power Electron 1998;13(2):252–60.[13] di Bernardo M, Vasca F. Discrete-time maps for the analysis of bifurcations and chaos in DC/DC converters. IEEE Trans Circuits Syst-I
2000;47(2):130–43.[14] El Aroudi A, Debbat M, Giral R, Olivar G, Benadero L, Toribio E. Bifurcations in DC/DC switching converters: review of methods and applications. Int J
Bifurcation Chaos 2005;15(5):1549–78.[15] Cafagna D, Grassi G. Experimental study of dynamic behaviors and routes to chaos in dc-dc boost converters. Chaos Solitons Fract 2005;25(2):499–507.[16] Cafagna D, Grassi G. Bifurcation analysis and chaotic behavior in boost converters: experimental results. Nonlinear Dyn 2006;44(1–4):251–62.[17] Avrutin V, Fossas E, Granados A, Schanz M. Virtual orbits and two-parameter bifurcation analysis in a ZAD-controlled buck converter. Nonlinear Dyn
2011;63(1–2):19–33.[18] Wang FQ, Ma XK. Stability and bifurcation in a voltage controlled negative-output KY boost converter. Phys Lett A 2011;375(12):1451–6.[19] di Bernardo M, Budd CJ, Champneys AR, Kowalczyk P. Piecewise-smooth dynamical systems. Theory and applications. London: Springer-Verlag; 2008.[20] Angulo F, Olivar G, Osorio GA, Escobar CM, Ferreira JD, Redondo JM. Bifurcations of non-smooth systems. Commun Nonlinear Sci Numer Simul
2012;17(12):4683–9.[21] El Aroudi A, Rodríguez E, Leyva R, Alarcón E. A design-oriented combined approach for power converters. IEEE Trans Circuits Syst-II
2010;57(3):218–22.[22] Fekia M, El Aroudi A, Robert BGM, Martínez-Salamero L. Optimizing the dynamics of a two-cell dc-dc buck converter by time delayed feedback control.
Commun Nonlinear Sci Numer Simul 2011;16(11):4349–64.[23] Pagano DJ, Ponce E. Sliding mode controllers design through bifurcation analysis. In: Proc. of the 8th IFAC symposium on nonlinear control systems.
2010; p. 1284–1289.[24] Pagano DJ, Ponce E. Sliding dynamics bifurcations in the control of boost converters. In: Proc. of the 18th IFAC world conference. 2011; p. 13293–
13298.[25] Tse CK, di Bernardo M. Complex behavior in switching power converters. Proc IEEE 2002;90(5):768–81.[26] Tse CK, Li M. Design-oriented bifurcation analysis of power electronics systems. Int J Bifurcation Chaos 2011;21(6):1523–37.[27] Dumortier F, Herssens C, Perko L. Local bifurcations and a survey of bounded quadratic systems. J Differ Equ 2000;165(2):430–67.[28] Perko L. Differential equations and dynamical systems. third ed. New York: Springer-Verlag; 2002.[29] Guckenheimer J, Holmes P. Nonlinear oscillations, dynamical systems, and bifurcations of vector fields. New York: Springer-Verlag; 1983.[30] Spinetti M, Fossas E, Biel D. Stability analysis of a Lyapunov-based controlled boost converter. In: Proc. of the 48th IEEE conference on decision and
control. 2009; p. 6544–6548.[31] Dickson RJ, Perko L. Bounded quadratic systems in the plane. J Differ Equ 1970;7(2):251–73.
Please cite this article in press as: Spinetti-Rivera M et al. Bifurcation analysis of a Lyapunov-based controlled boost converter. CommunNonlinear Sci Numer Simulat (2013), http://dx.doi.org/10.1016/j.cnsns.2013.03.018