Embed Size (px)
Citation preview

Bifurcation to heteroclinic cycles and sensitivity in three
and four coupled phase oscillators
Peter AshwinMathematics Research Institute,
School of Engineering, Computer Science and Mathematics,
University of Exeter, Exeter EX4 4QE, UK
Oleksandr BurylkoInstitute of Mathematics, National Academy of Sciences of
Ukraine, 01601 Kyiv, Ukraine
Yuri Maistrenko,Institute of Medicine and Virtual Institute of Neuromodulation,
Research Centre Julich, 52425 Julich, Germany;Institute of Mathematics, National Academy of Sciences of
Ukraine, 01601 Kyiv, Ukraine
September 7, 2006
Abstract
We make a detailed study of the dynamical behaviour of N globally coupled phaseoscillators introduced by Kuramoto, Hansel, Mato and Meunier for small N . Thismodel has been found to exhibit robust ‘slow switching oscillations’ that are causedby the presence of robust heteroclinic attractors. This paper presents a bifurcationanalysis of the system for N = 3 and N = 4 oscillators in an attempt to understandthe creation of such attractors. We investigate the sensitivity to detuning in terms ofthe smallest perturbations that give rise to loss of frequency locking.
For N = 3 we find three distinct types of heteroclinic bifurcation that are codimension-one for identical phase oscillators. On the two parameter plane these give three curvesgiving (a) a transcritical/heteroclinic bifurcation, (b) a saddle-node/heteroclinic bi-furcation and (c) a saddle connection/heteroclinic bifurcation. We also identify newcodimension-two global bifurcations.
For N = 4 oscillators we determine many (but not all) codimension-one bifurcationsin the two parameter plane leading to a robust heteroclinic cycle. The robust cycleis stable in an open region of the system parameters and unstable in another open
1

region. Furthermore, we verify that there is a subregion where the heteroclinic cycle isthe only attractor of the system, while for other parts of the phase plane it can coexistwith stable limit cycles. We finish with a discussion of generalizations of the results tohigher N .
1 Introduction
Coupled oscillators are of great interest from their applications in physics and biology [23,22, 8], but they are also of considerable mathematical interest in providing examples ofhow several systems with simple dynamics can interact to give highly nontrivial collectivedynamics [20]. Since the work of Winfree and Kuramoto [24, 16] there has been work on avariety of examples in attempts to understand general features about, for example, the onsetof synchronization in globally coupled oscillator systems.
An important class of models are coupled phase oscillator models of the form
θi = ωi + εf(θ1 − θi, · · · , θn − θi) (1)
that arise quite naturally in for example weak coupling of more general limit cycle oscillatorsin some way (ε represents a coupling strength and ωi the natural frequency of oscillator i).One particular type of this model is the Kuramoto model [16], where f = 1
N
∑Nj=1 sin(θj−θi),
which nonetheless possesses a number of degeneracies in its dynamics owing to the specialform of its coupling.
We consider a generalization of the Kuramoto model [18, 20] investigated by Hansel,Mato, Meunier and others [11, 12, 14, 15] that uses a more general two modes couplingfunction with the result than many of the degeneracies of the Kuramoto model are removed.This model was derived as an approximation of coupled neural oscillators [11] and is notablein that it was the first such model to produce non-trivial clustering dynamics even in thecase where the oscillators are identical. This takes the form of ‘slow switching’ where, in thepresence of noise, the dynamics shows approximately periodic oscillations between clusterstates.
This paper aims to understand the generic bifurcations that arise in this model for N = 3and 4 and some general results for larger N . The case N = 2 we do not consider because thiscannot give rise to heteroclinic cycles in our model. We find a number of new mechanismsthat give rise to the appearance of heteroclinic cycles. These cycles are codimension-one forN = 3 but can be robust for N = 4 and higher.
Most of this paper details the behaviour of a particular case of (1) for identical oscillatorsin the absence of detuning, i.e. such that ωi = ω independent of i. In such cases the slowoscillations can be explained as the presence of robust heteroclinic attractors that, in thepresence of noise, exhibit approximately periodic oscillations between dynamically unstable(saddle) states at a period that becomes unbounded as the noise is reduced to zero. Dynamicssimilar to such slow oscillations have been used for modelling processing in certain types ofneural systems [1, 6, 13] and hence are of particular interest in the neurosciences.
2

A second motivation for this paper is to better understand cases where there is extremesensitivity of attractors for system (1) to detuning [5], i.e. how ωi arbitrarily close to constantcan give attractors that lock frequency locking, even for strong coupling. This is closelyrelated to the appearance of slow oscillations.
1.1 A model for globally coupled phase oscillators
We consider the system of N ODEs
θi = ωi +K
N
N∑
j=1
g(θi − θj), where
g(x) = gα,r(x) = − sin(x − α) + r sin(2x),
(2)
for i = 1, · · · , N , where (θ1, ..., θn) ∈ TN , T
1 = [0, 2π), are phase variables, ωi, i = 1, · · · , N ,are natural frequencies, K > 0 is a coupling parameter, g(x) is a quite smooth couplingfunction. This system of a globally coupled oscillator for general g(x) is discussed in [3, 8]while the particular g was introduced in [11]; we refer to this as the Hansel-Mato-Meuniermodel. In the case r = α = 0 where the function g(x) = − sin x and can give rise todegenerate bifurcations at loss of stable synchronization; see Appendix B for more details.We are interested in the investigation of this system for the coupling function gα,r(x) withtwo parameters; where r ≥ 0 and α ∈ T
1. Kuramoto system with this coupling functionwas first considered in the work of Hansel, Mato and Meunier [11, 14, 15] motivated fromcoupled neural oscillators of Hodgkin-Huxley type. We can note that the description of thissystem for negative values of the parameter r is implied from the symmetry
gα,r(x) = −gα±π,−r(x).
Generally there are a number of dynamically important points in phase space; one ofthese is the in-phase solution
(θ, · · · , θ) : θ ∈ Tand another the set of antiphase solutions
M (N) =
(θ1, ..., θN) :
N∑
j=1
eiθj = 0
. (3)
(valid for identical oscillators, i.e. ωi ≡ ω). The set M (N) is a union of manifolds of dimensionN − 2 for N ≥ 3; see Appendix A. For any α it consists of fixed points of the reducedsystem in the case r = 0 and contains a union of invariant manifolds for more general r; seeAppendix B.
3

1.2 Reduction to phase differences
To exploit the phase-shift symmetry of this system one can describe the system dynamics interms of the dynamics of the phase differences
ϕi = θ1 − θi+1, i = 1, · · · , N − 1,
thus reducing this N -dimensional system to the (N − 1)-dimensional system
ϕi = ∆i + rK
N
[
sin(2ϕi) +N−1∑
j=1
(sin(2ϕj) + sin(2(ϕj − ϕi)))
]
−
−K
N
[
sin(ϕi + α)) +
N−1∑
j=1
sin(ϕj − α) +
N−1∑
j=1,j 6=i
sin(ϕi − ϕj − α)
]
(4)
where ∆i = ω1 − ωi+1, i = 1, · · · , N − 1 are the set of detunings of the oscillators. Thus (2)with N = 2 can be reduced to a scalar equation as described in [5]. In this paper we willdescribe cases N = 3 and N = 4 for (4) that are reductions of (2).
We mostly consider the case where ωi are all equal (no detuning, ∆i = 0 for (4)). Thiscondition implies the invariance of the sets
Pij = (θ1 · · · , θn) : θi = θjfor any i 6= j = 1, · · · , N.1 Without loss of generality we can set K = N by scaling timet.
1.3 Sensitivity to detuning
In real applications the assumption that all oscillators are equal (ωi ≡ ω) will be brokenby imperfections in the system and so it is interesting to ask how far one can perturb(or detune) the ωi before the oscillators lose synchronization, i.e. boundedness of phasedifferences on trajectories. For the standard Kuramoto model with r = 0 and α = 0 thesensitivity increases with decreasing coupling strength K. In contrast, for (2) extremelysmall detuning may desynchronize the phase dynamics even without decoupling [5]. Notethat when detuning is introduced it is possible for highly complicated dynamics may appear[20, 19]. More precisely we define as in [5] the sensitivity to detuning to be
Ω = supδ : |∆| < δ implies all attractors of (1) have bounded phase differences..We say a system has extreme sensitivity if it is such that Ω = 0. Extreme sensitivitygenerally appears at points of heteroclinic bifurcation and implies that arbitrarily smalldetuning destroys frequency locking between oscillators. We note that [5] indicated thatthis can appear robustly for N ≥ 5 coupled oscillators due to the appearance of robustheteroclinic attractors that when lifted to the torus form a single connected component; inthis paper we work on clarifying the appearance of extreme sensitivity for N = 3 and N = 4for a particular type of coupled phase oscillators.
1Note that this only applies for the case of no detuning.
4

Topological sensitivity We introduce a topological analogy to sensitivity to detuningthat we refer to as topological sensitivity to detuning. Suppose that the set of all attractorsof (1) is A∆ for given detuning ∆k = ωk − ωn, k = 1, · · · , n − 1 (so that A0 signifies theattractors for the system with identical ωi). We define
Ωtop = supδ : Bδ(A0) only has components that are contractible to the diagonalwhere Bδ(A0) is the δ-neighbourhood of A0 within T
N . If a set A0 ⊂ TN only has components
that are contractible to the diagonal2 (1, · · · , 1) ⊂ TN then it follows that all trajectories
attracted to A0 must have bounded phase differences. We use this to characterise extremesensitivity.
Lemma 1 If all attractors A0 are asymptotically stable and Ω = 0 then Ωtop = 0.
Proof: We prove by contradiction; namely that if Ωtop > 0 then Ω > 0. Note that if allattractors are asymptotically stable then they are upper semicontinuous in the followingsense: given any η > 0 there is a δ > 0 such that if ‖∆‖ < δ then Bη(A0) ⊃ A∆; see forexample [2]. Now suppose that η = Ωtop > 0; there is a δ > 0 such that for all ‖∆‖ < δ wehave
Bη/2(A0) ⊃ A∆.
Because A0 is closed and only contains components contractible to the diagonal the samemust hold for Bη/2(A0) with η small enough and hence by choosing an appropriate δ > 0)for the perturbed attractors A∆ with ‖∆‖ < δ; hence Ω ≥ δ > 0. QED
Note that the assumption that the attractors are asymptotically stable includes manytypes of heteroclinic attractor. A converse to Lemma 1 requires more stringent conditionsthat we have not investigated in detail. However, we can quantify a direct link betweenheteroclinic cycles and the appearence of extreme sensitivity given by the following result:
Lemma 2 If A0 contains an asymptotically stable heteroclinic attractor that is not con-
tractible to the diagonal then Ωtop = 0.
Proof: Note that if A0 contains components that are not contractible to the diagonal thenalso Bδ(A0) also does for all δ > 0. Hence Ωtop = 0. QED
2 Three globally coupled oscillators
In case N = 3 we write the reduced system (2) as the 2-dimensional system
ϕ1 = ∆1 − sin(ϕ1 − α) − sin(ϕ2 − α) − sin(ϕ1 + α)−− sin(ϕ1 − ϕ2 − α) + r(2 sin(2ϕ1) + sin(2ϕ2) + sin(2(ϕ1 − ϕ2))),
ϕ2 = ∆2 − sin(ϕ2 − α) − sin(ϕ1 − α) − sin(ϕ2 + α)−− sin(ϕ2 − ϕ1 − α) + r(2 sin(2ϕ2) + sin(2ϕ1) + sin(2(ϕ2 − ϕ1)))
(5)
2Another way to say this is that all pseudo-orbits in A0 have bounded phase differences.
5

on the torus T2 = [0, 2π)2. Put ∆1 = ∆2 = 0. Then three invariant lines ϕ1 = 0, ϕ2 = 0 and
ϕ1 = ϕ2 separate torus T2 on two triangular areas. We can make each of these triangles to
be equilateral by linear substitution of variable. Then we can see symmetry of the system(5) that is given by group S3. In this section we will fully describe all types of bifurcation forthe system obtained. Our main aim will be to describe different types of the appearance ofthe heteroclinic bifurcation. The heteroclinic bifurcation is a global bifurcation that consistsof some simultaneously arising local or global bifurcation. In this case there will be threesimultaneously arising bifurcations on or close to invariant lines caused by S3 symmetry.
The origin and the manifold M (3) are particularly significant in organizing the bifurcationbehaviour. Note that the latter consists of the antiphase point in each triangle
M (3) = (2π/3, 4π/3), (4π/3, 2π/3)
(we will name each of these Z3 symmetry points antiphase points). It can be shown thatthe origin and the antiphase point have opposite stability and change them simultaneouslywhen α crosses α0 = arccos(2r) (first the origin is an attractor and the antiphase point is arepellor, then vice versa)
2.1 Bifurcations for N = 3 in the (α, r) plane
In this subsection we describe bifurcation types of the equation (5). The result of thisinvestigation is bifurcation diagram Figure 1, where the analysis is via a mixture of analysisand numerical path-following and simulation using the package xppaut [9].
We only plot the bifurcation diagram α ∈ [0, π]; for α ∈ (π, 2π) the diagram is an imageunder the time-reversal symmetry (x, α, r) 7→ (−x,−α, r) and the symmetry (x, α, r) 7→(x + π, α + π, r). The curve
BH =
(α, r) : r =1
2cos α, α ∈
[
0;π
2
]
is the line of transcritical (in three directions) bifurcation at the origin (S3-transcriticalbifurcation) and simultaneously it is the line of inverse supercritical Hopf bifurcation of theantiphase points. A transcritical bifurcation occurs when three saddle points (each was inthe middle of corresponding invariant line when α and r were zeros) begin to move withincreasing α and meet at the origin.
Transcritical/heteroclinic bifurcation for r ∈ [0, rE]. We describe the bifurcationsillustrated in Figure 1 by fixing different values of the parameter r and change the parameterα for these r. When r = 0 (Kuramoto-Sakaguchi system) we have bifurcations at the pointα0 = π/2. There is a degenerate inverse subcritical Hopf bifurcation at the antiphase pointand transcritical bifurcation at the origin that implies the appearance of the heterocliniccycle (for this moment). We note that this heteroclinic cycle on the plane R2 splits intothree homoclinic cycles when we consider the same on the torus T2.
6

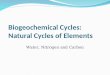
Figure 1: The parameter plane for the system (2) for N = 3. The phase portraits are shown
for φ1, φ2 ∈ [0, 2π). The codimension-one bifurcations illustrated are: ID: Pitchfork bifurcation
on invariant lines; BEGH: Transcritical bifurcation at 0; BEGH: Hopf bifurcation of antiphase;
HFAED: Saddle-node bifurcation on invariant lines; BE: Transcritical homoclinic bifurcation;
ED: Saddle-node homoclinic bifurcation; BD: Saddle-node of limit cycles; HCD: Saddle con-
nection heteroclinic bifurcation; DJ : Pitchfork bifurcation; DK: Saddle-node bifurcation; DL:
Saddle-node bifurcation. There are codimension-two bifurcations at A: cusp point; E: Interaction
of transcritical homoclinic and saddle-node homoclinic; D: Interaction of saddle-node heteroclinic
and saddle connection heteroclinic; H: Degenerate Hopf bifurcation of antiphase.
7

(a) (b)
(c)
Y
X
X
X
Y
φ1
φ1φ1
φ2φ2
φ2
X
X
Figure 2: Phase portraits in φi ∈ [0, 2π) for the codimension two bifurcation points D, E and H for
N = 3. (a) shows D; there is a cycle between saddle-nodes such that the connecting orbits foliate
triangles in phase space. (b) shows E; there are connections from the in-phase solution (corners)
via saddle-node points at X. (c) shows H; there is a degenerate Hopf bifurcation at the antiphase
points marked by Y .
Increasing the parameter r from zero to rE gives a non-degenerate Hopf bifurcation (thatimplies the appearance of the unstable limit cycle) and transcritical/heteroclinic bifurcationas described in [4] giving rise to stable limit cycles both on the line BED.
Lines HA and AD on the parameter plane are lines of a saddle-node bifurcation oninvariant lines. We have birth (resp. disappearance) of a pair of fixed points on each ofinvariant lines when increasing parameter α crosses HA (resp. AD). Hence these two saddle-node bifurcations do not leave any additional fixed point on invariant lines for increasing αand r ∈ [rA; rE) and heteroclinic bifurcation on the transcritical line is possible.
Saddle-node/heteroclinic bifurcations for r ∈ [rE, rD]. When r is bigger than rE twoadditional fixed points lie on each of the invariant lines after α has already crossed theline EH of transcritical bifurcation. Since heteroclinic bifurcation cannot occurs with thetranscritical one on EH, it happens later with saddle-node bifurcation on ED. The shapeof the heteroclinic cycle in this case is different from the previous one. It consists of threepairs of saddle and saddle-node points lying on respective invariant lines and six connectingseparatrices (see also [5] for the bifurcation details).
8

ID Pitchfork bifurcation on invariant linesBEGH Transcritical bifurcation at 0HFAED Saddle-node bifurcation on invariant linesBE Transcritical homoclinic bifurcationED Saddle-node homoclinic bifurcationBD Saddle-node of limit cyclesHCD Saddle connection heteroclinic bifurcationDJ Pitchfork bifurcationDK Saddle-node bifurcationDL Saddle-node bifurcation
Table 1: The codimension-one bifurcations for N = 3 illustrated in Figure 1.
If we change parameters (α, r) from E to D along the line ED, then the saddle pointmoves from 2π to 5π/3 and the saddle-node point will slide from π/2 to 2π/3 on ϕ1 = 0line (and symmetrically on other invariant lines). Stable limit cycle generated by saddle-node/heteroclinic bifurcation has quasi-hexagonal form in contrast to such cycle generatedby transcritical/heteroclinic bifurcation that has quasi-triangular form. The intersectionpoint E of transcritical/heteroclinic and saddle-node/heteroclinic bifurcation has coordinatesαE = arctan(3) = 1.2490458, rE =
√10/20 = 0.15811388 and is illustrated in Figure 2. The
mechanism of a saddle-node/heteroclinic bifurcation and its asymptotics was also describedin the work [5]. Note that the appearance of heteroclinic cycles generated by saddle-nodeand transcritical (with some complication) bifurcation is a general property of the system(4) for arbitrary N ≥ 3.
Pitchfork bifurcations for r ∈ [rI , rD]. For r > rI = 1/6 a pitchfork bifurcation appearson varying α through the line ID. This is a supercritical pitchfork bifurcation of the saddlethat lies on the invariant line and this bifurcation occurs in a transversal direction to thisline. When α = 0 and r increases from rI , the middle of each invariant line is a source andthree pairs of saddles move in orthogonal direction to the antiphase points. They reach theantiphase points when r = 0.5 and at this point we have a codimension-two bifurcation. Thusfor r belonging to [rF ; rH) and increasing α first we have the coexistence of sink and sourcethat lie together on the invariant line and are not separated by any other fixed point (in regionHFDJ). The pitchfork bifurcation that occurs on the line FD implies the disappearance ofsource and appearance (instead of it) of saddle on the invariant line. This gives possibilityof further saddle-node bifurcation on the invariant line with attracting transversal direction.And in this case we have the heteroclinic cycle on line ED that generates a stable limit cyclewith increasing α.
Heteroclinic bifurcation to a stable limit cycles for [rB, rD] There is a heterocliniccycle consisting precisely of three invariant lines with symmetry S2 × S1 for (α, r) on thecurve BE. Also, there is a heteroclinic cycle which consists of six pieces (part of them lie
9

(a) (b) (c)
Figure 3: Schematic diagram showing detail of the saddle connection heteroclinic bifurcation that
occurs on the line CD in parameter space for N = 3 oscillators. Note that this occurs in the interior
of the invariant triangle in a neighbourhood of the antiphase state indicated by the triangle; see
text for details.
on the invariant lines) for (α, r) on the curve ED. When crossing line BED with increasingα, a stable limit cycle is born. Therefore the region BED on the parameter plane is thecoexistence region of big stable and small unstable limit cycles that disappear in a limit cyclesaddle-node bifurcation when (α, r) crosses BD.
Saddle connection/heteroclinic bifurcation The third type of the heteroclinic bifur-cation that takes place in this system is a saddle connection/heteroclinic bifurcation. Thelines of this bifurcation type are CH and CD. Thus the bifurcation occurs twice for eachr ∈ (rC , rD) and changing α and once for r ∈ [rD, 0.5). This bifurcation consists of threesaddle connection (or homoclinic) bifurcations that happen simultaneously at three saddlesin the symmetric way (Figure 3). When we fix some parameter r0 ∈ (rC , 0.5), change α fromα = α0 = arccos(2r0) (where unstable limit cycle appeared) and reach line CH, then threeseparatrices cross three saddles and the enlarging unstable limit cycle merges with interiorseparatrices. This triangular heteroclinic cycle is unstable. Further increase of parameterα leads to disappearance (as usual) of limit cycle and fall of three separatrices of differentsaddles into the antiphase point at the centre of the triangle.
On increasing the parameter α for r ∈ (rC , rD) the heteroclinic bifurcation that wasgenerated by the saddle connection bifurcations happens in a different order. Following thisbifurcation we obtain an unstable limit cycle, but it is larger in this case (Figure 3).
At the moment of saddle connection/heteroclinic bifurcation (on HCD line) one canverify that all separatrices of saddles are in fact straight lines given by ϕ2 = (ϕ1 − β)/2,ϕ2 = 2ϕ1 + β − 2π and ϕ2 = −ϕ1 + β + 2π, where β goes from 0 to 2π/3 as α goes from 0to αD. Saddle coordinates are (β + 4π/3; 2π/3), (4π/3; β + 2π/3), (−β + 2π/3;−β + 4π/3)and similarly for other three saddles.
Interaction of saddle-node homoclinic and pitchfork at D. The codimension-twobifurcation D with coordinates αD = 5π/6−arccos(
√21/14) = 1.3806707 and rD = 1/
√7 =
10

0.37796447 is illustrated in Figure 2 and seven bifurcation lines meet at this point. Twotypes of the heteroclinic bifurcation (saddle-node and saddle connection) take place simulta-neously in such a way that they create regions in phase plane (ϕ1, ϕ2) filled by trajectories ofheteroclinic cycles. A large hexagonal heteroclinic cycle (generated by saddle-node bifurca-tion) has three joint points (vertexes) with the small triangular heteroclinic cycle (generatedby saddle connection bifurcation). It results in three triangles filled with trajectories (thatrun in the same direction) and connected between themselves that produces a set of theheteroclinic cycles. All separatrices that bound this set are described by the equations inthe previous paragraph with parameter β = 2π/3.
Bifurcations for r ∈ [rD, 0.5]. Lines DJ , DK and DL are lines of pitchfork, saddle-nodeand saddle-node bifurcation respectively. Let us consider the region HCDJ for r > rD andincrease the parameter α. There is one sink and one source on each invariant line when(α, r) ∈ HCDJ and two saddles lie off the invariant lines close to these points (created bythe pitchfork when r < rD). First (when α reaches DJ) we have transversal to invariantline pitchfork bifurcation of the mentioned sink that generates two new sinks and leavessaddle on the invariant line. Then we have the saddle-node bifurcation of these sinks withsaddles when α crosses DK. The next saddle-node bifurcation of the source and saddle onthe invariant line (when α crosses DL) gives us a simple phase portrait with two sinks atthe centres, the source at the origin and three saddles on the invariant lines. Note thatsaddle-node points of the last bifurcation are repelling transverse to the invariant line. Forthis reason they cannot be included within a heteroclinic cycle.
Bifurcations for r > 0.5 For r > 0.5 there are no heteroclinic cycles or limit cycles. Onincreasing r the phase portrait becomes topologically equivalent to the situation in regionJDK but with double the periodicity.
2.2 Detuning and sensitivity for N = 3
System (4) typically has no heteroclinic cycles for frequencies differences ∆i 6= 0, i = 1, 2.Nonetheless the existence of heteroclinic cycles for ∆i ≡ 0 that are topologically non-trivialon the torus T
2 implies the existence of very low values of the sensitivity Ω near the bifur-cation. In particular we can conclude that
Ω = 0 on the line BED
whereas Ω > 0 everywhere else in parameter space. This extends the bifurcation analysisat fixed r in [5] to the two-parameter plane and explains the loss of phase locking observedexperimentally in [4] near loss of stability of the in-phase solution in a system of three coupledelectronic oscillators.
There can however be heteroclinic cycles with ∆i 6= 0 for r = 0 and α = π/2 where thesystem has Z2 symmetry for any values of ∆i at the point (ϕ1, ϕ2) = (π, π). There exist twohomoclinic loops that encircle regions foliated by limit cycles about centres, and these loops
11

combine together into a eight-figure on the torus T2. These homoclinic loops exist when ∆1,
∆2 belong to quasi-triangular region with vertexes at points (2, 2), (−2, 0), (0,−2) on theparameter plane. The loops contract creating cusps when ∆1, ∆2 reach edge of the regionfrom inside and disappear when the parameters leave the region.
3 Four globally coupled oscillators
3.1 The structure of phase space for N = 4.
We now consider system (4) for N = 4 posed for the phase difference variables (ϕ1, ϕ2, ϕ3)on T
3 and with ∆i ≡ 0. As already mentioned all planes ϕi = 0, i = 1, 2, 3, are invariantand all lines ϕi = 0, ϕj = 0, i, j = 1, · · · , 3, ϕ1 = ϕ2 = ϕ3 are invariant as well. In theterms of symmetry groups, these lines have S3 × S1 isotropy [3, 8]. Also the planes ϕi = ϕj,i = 1, 2, 3, are invariant. Thus the diagonals of the cube faces ϕi = ϕj, ϕk = 0, i 6= j 6= k,i, j, k = 1, 2, 3, are invariant. These lines have isotropy S2 × S2.
If we take the cube [0, 2π]3 modulo its main diagonal we can divide it into six equalvolume tetrahedra with the help of the above described invariant planes. Each tetrahedronis an invariant region corresponding to points on T
N that lift to the set
(θ1, θ2, θ3, θ4) : θσ(1) ≤ θσ(2) ≤ θσ(3) ≤ θσ(4) ≤ θσ(1) + 2π.
for some permutation σ ∈ S4. For the particular case where σ is the identity this invariantset is called the canonical invariant region [3]. These tetrahedra have faces with S2 isotropy.Of the edges, four have S3 × S1 isotropy and two have S2 × S2 isotropy. The manifold M (4)
consists of six direct lines that connect the centres of the cube faces. Each of these linesbelongs to one of tetrahedra and has Z2 isotropy. The centre of manifold M (4) is an antiphasepoint with Z4 isotropy and a point of intersection of lines with S2 × S2 and Z2 isotropy has(S2)
2+Z2 isotropy where + indicates a semidirect product. Hence we split the torus of phasedifferences into six solid tetrahedrons of the form shown in Figure 4.
Let us imagine that four points of cube (0, 0, 0), (2π, 0, 0), (2π, 2π, 0), (2π, 2π, 2π) areconnected in the sequentially closed curve γ1 and this curve has some direction. In the sameway we can define similar curves γi, i = 2, · · · , 6 for other tetrahedra. From this point weconsider only the dynamics within one tetrahedron as the dynamics on all others is given bysymmetry.
3.2 Bifurcation structure for N = 4.
A diagram showing the main bifurcation structure for N = 4 is given in Figure 5 with thecodimension-one bifurcations listed in Table 2. Firstly we consider the case r = 0 (Kuramoto-Sakaguchi system). For α = 0 we have one attractor that is origin and one repellor thatis manifold of fixed points M (4). Also there are saddles with all coordinates 0 or π. Forincreasing parameter α all saddles begin to move along the invariant lines in the (or reverse)direction of γi. When α = π/2, the transcritical bifurcation (along S3×S1 invariant lines) at
12

Z 2
Z 2 2 2( S )
S 1S 3
2 S 2 S
Z 4
Figure 4: Diagram showing the phase space in terms of one invariant tetrahedron for the case
of identical phase oscillators with N = 4. This shows the relationship between the subspaces with
differing symmetries. The point at the centre is the antiphase solution with Z4 symmetry; the faces
of the invariant tetrahedron with S2 symmetry.
13

0 0.5 1 1.5 2 2.5 3α
0
0.1
0.2
0.3
0.4
0.5
rB
I
RH
A
E
T
M V QJ L
D
F
G
K
Figure 5: Bifurcation diagram for N = 4 oscillators in the (α, r). See text and Table 2 for a
description of the bifurcation lines; there are robust heteroclinic cycles between two cluster states
in the region outlined by BEDTLV that are attractors to the left of the line BM . There is a
complicated sequence of bifurcations near the point D that is not shown in detail in this diagram.
BEGH Transcritical-pitchfork bifurcation at 0BQ Inverse pitchfork bifurcation of saddles at the point with (S2)
2⊗
Z2 symmetryBV Pitchfork/heteroclinic bifurcation of solutions with symmetry S2 × S2
(in transversal to S2 × S2 direction)BM Hopf bifurcation of antiphase points (Z4) and change of stability of robust
heteroclinic cyclesHAED Saddle-node bifurcation to solutions with symmetry S3 × S1
IFGD Transcritical bifurcation of solutions with symmetry S3 × S1 at the source Ui
DK Saddle connection bifurcation (not heteroclinic) in subspace with symmetry S2
DJ Transcritical bifurcation of solutions with symmetry S3 × S1 at the sink Wi
DTL Saddle-node bifurcation inside tetrahedra on S2 planeBTR Pitchfork bifurcation of limit cycles within tetrahedronIFGD′ There is a saddle-node bifurcation line which is right to the line IFGD
and very close to itDJ ′ There is a saddle-node bifurcation line between DK and DJ
(the bifurcation occurs on WiVi in phase space)DL′, DL′′ Two saddle-node bifurcation lines are between DJ and DL,
the second of these bifurcations happens on the S3 × S1 invariant line
Table 2: A list of the codimension-one bifurcations for N = 4 including those illustrated in Figure 5.
14

2S 2S
S 1S 3
S 1S 3
P 1
P 1
P 2
P 2
Figure 6: Continua of heteroclinic cycles for N = 4 for (α, r) = (π/2, 0) (point B in Figure 5).
For this degenerate situation there is a manifold of fixed points on the S2 × S2 invariant subspace.
the origin and the Hopf bifurcation on the M (4) take place. At this moment each tetrahedronis filled with the closed trajectories and all invariant planes are filled with the parts ofheteroclinic cycles. Each part of heteroclinic cycles γ(ϕ) = W u(P1(ϕ))
⋂
W s(P2(2π − ϕ)) isbased on two saddles P1(ϕ), P2(2π − ϕ), ϕ ∈ [0; π], that belongs to S2 × S2 invariant lines,where ϕ is variable on these lines (we have three pairs of P1, P2 since there are three S2 ×S2
lines on the torus T3). We obtain continuous sets of heteroclinic cycles because the whole
S2 ×S2 invariant lines are filled with saddle points as in Figure 6. Origin and manifold M (4)
change their stability at the moment of this bifurcation and heteroclinic cycles disappearwith increasing α > π/2.
3.3 Heteroclinic cycles for N = 4.
Further we have the existence of heteroclinic cycles when parameter α belongs to someinterval [α1(r0), α2(r0)] for any fixed r0 ∈ (0, 0.5]. Despite the different types of creation allheteroclinic cycles have some common properties:
1. All heteroclinic cycles consist of a union of Γ1 and Γ2, subsets of two different S2
invariant planes connected by S2 × S2 invariant line. Each of these two lines Γ1 and
15

Γ2 consists of several parts:
Γi =
N⋃
j=1
Γij, i = 1, 2, j = 1, · · · , m
where m can change from 1 to 5 depending on the heteroclinic cycle type.
2. Γ1 and Γ2 are based on two saddles P1, P2, so that W u(P1) = Γ11, W s(P2) = Γ1N ,W u(P2) = Γ21, W s(P1) = Γ2N and other two pairs of stable manifold of these saddlesbelong to invariant S2 × S2 line.
For any fixed r ∈ (0, 0.5] and increasing α saddles P1 and P2 appear as a result ofthe subcritical pitchfork bifurcation that occurs at the origin when α− = arccos(2r0) anddisappears as a result of an subcritical pitchfork bifurcation at the middle of S2×S2 invariantlines (a point with (S2)
2+Z2 symmetry) when α+ = π − arccos(2r0). The lines of thesepitchfork bifurcations on (α, r) bifurcation diagram are BH and BQ respectively. Coordinatesaddles P1 and P2 on invariant S2 × S2 line are ϕ(P1) = arccos
(
cos α2r
)
, ϕ(P2) = 2π −arccos
(
cos α2r
)
respectively. The system (4) has the same eigenvalues at points P1 and P2
which are expressed by formulae:
λ1(α, r) = −2r(4r2 − cos2 α) ,
λ2,3(α, r) = −1r
(
cos α(2r − cos α) ∓ sin α√
4r2 − cos2 α)
.
We note that the existence of saddle points P1 and P2 is a necessary but not sufficientcondition of heteroclinic cycles existence, i.e. [α1, α2] ⊂ [α−, α+]. The are two reasonsfor that. The first reason is that invariant manifolds of saddles Pi, i = 1, 2, change theirstability such that dim W u(Pi) = 1, dim W s(Pi) = 2 before the bifurcation at α = α2 anddim W u(Pi) = 2, dim W s(Pi) = 1 after this bifurcation. The second reason is that thechain of invariant manifolds Γij, j = 1, · · · , m, (parts of heteroclinic cycle that belong tothe invariant planes) can be broken on the S3 × S1 invariant lines or close to them by thebifurcation of different types. Then α1 > α−.
3.4 Bifurcation to heteroclinic cycles for N = 4
The first type of heteroclinic bifurcation occurs for r0 ∈ [0,√
5/10] and it is transcritical-pitchfork. We have a transcritical bifurcation at the origin that takes place along four S3×S1
invariant lines and simultaneously we have a pitchfork bifurcation at this point along threeS2×S2 invariant lines. These two bifurcations occur when α = α− = arccos(2r0), i.e. on theBH-line in a two-parameter plane (the same line BH of the transcritical bifurcation was forN = 3). The transcritical bifurcation changes stability of the origin. The pitchfork bifurca-tion generates pair saddle points P1, P2 mentioned above. Thus there are heteroclinic cyclesγi, i = 1, · · · , 6, (in the 3-dimensional cube), each of them on the edges of its tetrahedron,i.e. each of them consists of four invariant S3 × S1 lines as in Figure 7.
16

S 1S 3
S 2S 2
Z 2
γ i
0 2π
2π
2π
Figure 7: Schematic diagram showing one of the heteroclinic cycles for N = 4 in the φi coordinates
just to the right of the transcritical-pitchfork heteroclinic bifurcation line (BE in Figure 5). Note
that there is a saddle-type periodic orbit near the cycle.
17

Γ1
Γ1
2S 2S
S 3 S 1
S 3 S 1
S 3 S 1
Γ2
P1
P2
Figure 8: Schematic showing heteroclinic cycles inside area BEDTLV on Figure 5 for N = 4 which
are stable on the left and saddle on the right side of BM . We investigate a range of bifurcations
leading to the creation of such cycles.
On the other hand, we have four homoclinic orbits on the torus T3 that are based at
the origin. Saddle P = P1 = P2 is degenerated at this moment. In terms of Γ we haveΓi = Γi1
⋃
Γi2, i = 1, 2, and all Γij are invariant S3 ×S1 lines. For increasing α > α− saddlesP1 and P2 move along S2×S2 invariant lines and pull Γi inside tetrahedra. After bifurcationΓi leaves the origin with two saddles in S2 × S2 direction and looses the fixed point in theorthogonal direction. Thus each Γi consists now only of one part and each heteroclinic cycleconsists of two parts; see Figure 8. On the other hand, we obtain two heteroclinic cycles ineach tetrahedron instead of one that is for α = α−.
We have described the appearance of heteroclinic cycles with the first type of bifurcationthat happens for r ≤
√5/10 and α1 on the line BH. For other values of r and increasing α
we have some different bifurcation types that generate heteroclinic cycles. Regardless of thetypes of the bifurcation appearance heteroclinic cycles exist on some interval [α1, α2] and aredestroyed in the same way for any r ∈ (0, 0.5]. Before the disappearance of bifurcation anyheteroclinic cycle consists of two curves Γ11, Γ12 connecting P1 and P2 (Figure 8). Saddlepoints P1, P2 disappear with the pitchfork bifurcation on the line
BQ =
(α, r) : r = −1
2cos α, α ∈ [π/2, π]
when α = α+ but heteroclinic cycles disappear earlier with another pitchfork bifurcation on
18

the line
BV =
(α, r) : r =cos α
2 cos(2α), α ∈ [π/2, 2π/3]
when α = α2. This last supercritical pitchfork bifurcation occurs in different transversalto S2 × S2 invariant line directions at points P2 and P1. Thus two new saddles appear onthe invariant plane where Γ1 = W u(P1) lies and two other ones appear in the plane whereΓ2 = W u(P2) lies. Eigenvalues λ2(α, r) of points P1, P2 change their signs from negativeto positive on the curve BV . Then these points become unstable in both transversal toinvariant line direction and heteroclinic cycles split. This is another type of the appearance(disappearance) of heteroclinic cycles. We note that BQ and BV are only bifurcation linesfor α ∈ [π/2, π] and r ∈ [0, 0.5]. Thus heteroclinic cycles exist at least for any α ∈ [π/2, α2],and disappear (appear) with the pitchfork/heteroclinic bifurcation on BV .
3.5 Stabilities for N = 4
The eigenvalues λ1(α, r) of saddles P1, P2 are negative along S2 × S2 direction for anyparameters (α, r) belonging to quasi-triangular area BQH of the two-parameter diagram(i.e. when α ∈ (α−, α+), r ∈ [0, 0.5]). Hence these saddles are attractive along S2 × S2
invariant lines. The sum of other pairs of eigenvalues σ(α, r) = λ2(α, r)+λ3(α, r) is negativeas α ∈ (α−, π/2) and it is positive when α ∈ (π/2, α+).
Stabilities of heteroclinic cycles From the above we can conclude that heterocliniccycles Γ1
⋃
Γ2 are attractive for which α < π/2 when these heteroclinic cycles exist and theyare saddle ones for α ∈ (π/2, α2) and r ∈ [0, 0.5]. The straight line
BM = (α, r) : α = π/2
is the line of stability change of heteroclinic cycles, which cooincides with the line of Hopfbifurcations of the antiphase point with Z4 symmetry. The subcritical pitchfork bifurcationof heteroclinic cycles (or their parts) happens in transversal to invariant planes directionwhen α intersects line BM . The saddle heteroclinic cycle becomes stable and it generatestwo saddle limit cycles when α decreases. Thus we have two saddle limit cycles inside anytetrahedron for α slightly less than π/2. We note that the supercritical pitchfork bifurcationof any stable heteroclinic cycle takes place with three different saddle limit cycles becausetwo parts Γ1 and Γ2 of it combine three different tetrahedra.
Stability of the antisynchronized set We consider the antisynchronized set of invariantmanifolds M (4) that belongs to one of tetrahedra (line with Z2 symmetry, Figure 4). Thecentre of M (4) (with Z4 symmetry) is attractor along manifold for any considered α, r. It isa saddle-focus for α ∈ [0, π/2)) and a sink for α ∈ (π/2, π) with repelling and attracting tra-jectories in transversal directions respectively. Thus system (4) doesn’t have any attractorsexcept six sinks at the centres of invariant manifold M (4).
19

The centre of invariant manifold M (4) changes its stability as a result of the supercriticalHopf bifurcation that happens on BM simultaneously with supercritical pitchfork bifurcationof heteroclinic and limit cycles.
If α is slightly less than π/2 we have two stable heteroclinic cycles on the tetrahedronfaces, a stable limit cycle inside tetrahedron and two saddle limit cycles that separate them.On further decreasing parameter α and its crossing of line BTR we obtain a subcriticalpitchfork bifurcation of the stable limit cycle and two saddle limit cycles. For smaller αwe have the only saddle limit cycle inside each tetrahedron. In the case r ∈ [0,
√5/10]
this saddle limit cycle appears together with heteroclinic cycles in the transcritical-pitchforkbifurcation. In a global sense this bifurcation is also a supercritical pitchfork bifurcationof cycles transformation. A newly created stable heteroclinic cycle (that consists of fourparts) bifurcates into two stable heteroclinic cycles (that consist of two parts) and a saddlelimit cycle, when increasing α crosses line BH. We note that in the case when heterocliniccycles coexist with the saddle limit cycle, these heteroclinic cycles are the only attractorsin our system. As in the case N = 3 the line of transcritical/heteroclinic bifurcation to theorigin connects to a line of saddle-node bifurcation. They coincide at point E at (αE, rE) =(arctan(3),
√10/20) in Figure 1. Saddle-node points lie on invariant S3 × S1 lines at the
distance π/2 from the origin.
Saddle-node heteroclinic bifurcation For N = 4 the saddle-node bifurcation that hap-pens on invariant lines (HA in the (α, r)-plane) breaks the possibility of connecting differentparts of the heteroclinic cycle. But the second saddle-node bifurcation eliminates the con-sequences of the previous one on AE enabling the appearance of a transcritical bifurcation.For r > rE this scenario is impossible since unstable manifold W u(P1) hits stable point. Thesame is with W s(P2) and the closest source. The saddle connection bifurcation that happenson the invariant S3 × S1 lines or inside invariant planes close to these lines causes the ap-pearance of a heteroclinic cycle. The simplest scenario of this bifurcation is for r ∈ [rE, rD]as in Figure 9. In this case each of Γi, i = 1, 2, consists of 5 parts. If we consider thetetrahedron on the whole then we can see that two heteroclinic cycles of the tetrahedronhave four common parts (R11R12, R13R14, R21R22, R23R24). It can be shown that there existfour quasi-triangular 2-dimensional areas (like R24P1R11) filled with trajectories going in thesame direction as in Figure 10. Thus we have 2-dimensional sets of heteroclinic cycles insideeach tetrahedron that consist of 4 quasi-triangles and 4 connecting lines. One of heterocliniccycles of this set has 12 parts: P1R11R12P
′1R13R14P2R21R22P
′2R23R24. With increasing α we
obtain the standard for (4) heteroclinic cycles that change their stability when α = π/2 anddisappear when α crosses BV .
Line ID on the bifurcation diagram represents sequence of transcritical and saddle-nodebifurcations that happen with the source that lies in the middle of invariant S3 ×S1 line andsix saddles which belong to invariant planes. Lines of these two bifurcations lie very closeto each other and almost merge. The bifurcation sequence happens on invariant planes andcan be schematically represented by Figure 12 a)–e). Point I has coordinates α = 0 andr = 1/4. There are twelve saddles around the source that belongs to invariant line for any
20

R
R
S 2S 2
S 1S 3
S 1S 3
S 1S 3
S 1S 3
P1
P 2
R
R
11
12
13
14
R21
R 22
R 23
R 24
R 11
R 12
R 13
Figure 9: Bifurcation to heteroclinic cycles for N = 4 on the line ED in Figure 5. In fact there
are two dimensional sets of connections between the saddle-nodes R11 → R13 and R13 → R14.
r > 1/4 and α = 0. Simultaneous three pitchfork bifurcations of nine saddles that happenwith increasing α reduce twelve saddles mentioned to six saddles that lie on invariant planes.Line ID crosses saddle-node bifurcation line HA at point G and bifurcation transcritical lineBH at point F . Figure 11 schematically shows the phase portrait on the invariant planeswhen parameters belong to the area HGDK. The present figure shows that the scenario ofheteroclinic cycle appearance must be more complicated than the saddle-node bifurcation oftwo points on invariant S3 × S1 lines. Therefore we have three main possibilities to obtain aheteroclinic cycle for r > rG, where rG is approximately equal to 0.303.
1. With increasing α unstable point Ui participates in some bifurcations with point Vi
and becomes a saddle point. Then this saddle point connects with stable point Wi
creating the saddle-node/heteroclinic bifurcation. The way of the changes is shown inFigure 12. The sequence of the bifurcation described happens when r ∈ [0.302, 0.404]approximately.
2. With increasing α stable point Wi undergoes further bifurcations. It generates threestable points inside the tetrahedron on three invariant planes, transforms into thesaddle and then it disappears in the saddle-node bifurcation together with point Ui.The stable points just created participate in the saddle-node bifurcation with pointsVi with increasing parameter α (Figure 13). Line DJ on the bifurcation diagramrepresents the first saddle-node bifurcation (Figure 13 b) ). This is important that the
21

S 3 S 1
S 3 S 1
S S 2 2
S S 2 2
4Z
S 3 S 1
M (4)
R 23
2P ’
R 22
R 24
P 1
R 11
R 12
S 3 S 1
R 13
R 21
P 2
1P ’ R 14
Figure 10: Detail of the interior connections that exist in the case shown in Figure 9 for N = 4.
22

S 3 S 1
S 3 S 1
S 3 S 1
P 1
1U 1
U2
2
P 2
3 4
U 4
U 3
1
2
V 3
V 4
U
V
V
W
W
WW
S S2 2
Figure 11: Global connections for parameters belonging to HGDK and N = 4.
last bifurcation (which is saddle-node) happens inside the tetrahedron in the invariantplane, not on the invariant S3 × S1 lines especially for studying extreme sensitivityof the system. We note that the saddle connection bifurcation KD of reorganizationof separatrices V1W2 and UV2 takes place before this bifurcation occurs. After thesaddle connection bifurcation we have the phase portrait shown in Figure 14. We notealso that the sequence of bifurcations (shown in Figure 13) is different with the g)-h)bifurcation happening before e)-f) with increasing α and values of r close to 0.5.
3. When parameter r is in a small interval near r = 0.404 the sequence of bifurcationsis rather more complicated. In previous two cases one of nodes Ui or Wi becamesaddle (unstable or stable in transversal to invariant lines direction respectively) aftersome bifurcations and then this saddle interacts with other nodes, disappearing insaddle-node bifurcation. In this case we have direct interaction of these two nodes asit can be schematically shown in Figure 15. Let us note that all these bifurcationshappen when parameter α changes on the extremely small interval. Further we obtaina saddle connection/heteroclinic bifurcation (Figures 16–18). Sequence of bifurcationsshown in Figures 15 ends with picture e) which takes place as local element of thesituation (Figure 16) that happens before saddle connection/heteroclinic bifurcation.Each heteroclinic cycle consists of four parts which do not have common points withS3×S1 invariant lines (Figure 17). After bifurcation, saddle points Ri1 coexist with the
23

e)
a)
d)
b) c)
f)
Figure 12: The sequence of bifurcations on increasing α for the connections shown in Figure 11
and r in the interval [0.302, 0.404]. The situation in f) corresponds to crossing the line DL in
Figure 5.
f)
a)b) c)
g) h)
d) e)
Figure 13: The sequence of bifurcations on increasing α for the connections shown in Figure 11
and when r is bigger than 0.4045. The situation in f) corresponds to crossing the line DL in
Figure 5.
24

S 3 S 1
S 3 S 1
P 1
1U 1
U2
P 2
4
U 4
U 3
V 4
V 2
V3
V 1
U
W
W
W
2
W 3
2
S 3 S 1
S S2
Figure 14: Global connections for parameters belonging to KDJ and for N = 4.
b) c)a)
d) e)
Figure 15: The sequence of bifurcations on increasing α for the connections shown in Figure 11
and r close to 0.404. The situation in b) corresponds to crossing the line DL in Figure 5.
25

P 1
P 2
S 2 S 2
S 1S 3
S 1S 3
S 1S 3
R 21
Figure 16: Schematic diagram showing situation before saddle connection/heteroclinic bifurcation
near the point T in Figure 5 for N = 4.
heteroclinic cycle for small increase of α and then disappear in the saddle-node with thesaddle-node bifurcation. Saddle connection/heteroclinic bifurcations also happens forsmall r ∈ (0.404, 0.04045) as a continuation of bifurcation sequence shown on Figure 15a)–d) with further saddle-node bifurcations on the invariant line.
When parameter r is in a very small interval near r = 0.404 the sequence of the bifurcationis somewhat more complicated. In this case we can obtain a saddle connection/heteroclinicbifurcation that is schematically shown in Figure 17. Thus each heteroclinic cycle consists offour parts which do not have common points with S3 × S1 invariant lines. After bifurcationsaddle points Ri1 coexist with the heteroclinic cycle for small increase of α and then disappearin the saddle-node with the saddle-node bifurcation.
3.6 Summary of heteroclinic bifurcations for N = 4
We find five distinct types of codimension one bifurcation to robust heteroclinic cycles in the(α, r) plane; the curves correspond to their labelling in Figure 5.
1. TCPFH Transcritical-pitchfork heteroclinic at the origin on the line BE
2. SNH Saddle-node at invariant S3 × S1 lines on the line ED
3. SNIH Saddle-node at invariant S2 planes (inside tetrahedra) on the line DL
26

P 1
Γ 21
P 2
Γ 22
Γ 11
Γ 11
Γ 12
Γ 12
S 2 S 2
S 1S 3
S 1S 3
S 1S 3
R 11
R 21
R 11
Figure 17: Schematic diagram showing bifurcation to heteroclinic cycles via a saddle connection
near the point T in Figure 5 for N = 4.
4. SCIH Saddle connection bifurcation at invariant S2 planes in small neighbourhood ofthe point D
5. PFH Pitchfork bifurcation at invariant S2 × S2 lines on the line BV
The heteroclinic cycles exist when parameters α, r belong to region BEDTLV in theparametric plane shown in Figure 5. These heteroclinic cycles are stable when α < π/2,unstable when α > π/2 and neutral when α = π/2. For most of the region of parametersBEDTLM when heteroclinic cycles are the only attractors of the system (4), although nearthe line TL there are also attracting solutions with symmetry S2.
Note that there exist two-dimensional sets of connecting orbits within these heterocliniccycles when parameters (α, r) = (π/2, 0) or when we have (α, r) on the SNH line ED in Fig-ure 5. Heteroclinic cycle may generally have between two and twelve connected componentsof connecting orbits.
4 Discussion
In summary we have performed a detailed bifurcation analysis of the system (2) for N = 3and N = 4 oscillators in the α, r plane of parameters, assuming no detuning. In particularwe have identified what we believe to be all cases of bifurcation to dynamics that may give,
27

P 1
P 2
S 2 S 2
S 1S 3
S 1S 3
S 1S 3
Γ 1
Γ 2Γ 1
R 11
Figure 18: Schematic diagram showing the situation after saddle connection bifurcation the point
T in Figure 5 for N = 4. Heteroclinic cycles consist of two connecting orbits in this case.
on addition of detuning, extreme sensitivity on noting that these are associated with thecreation of heteroclinic attractors. Note in particular that TCPFH, SNH in Section 3.6give networks that by Lemma 2 give extreme sensitivity; the other bifurcations to robustheteroclinic cycles give cycles that are contractible to the diagonal meaning we do not expectextreme sensitivity in these cases.
The bifurcation scenarios are surprisingly rich given the small number of degrees offreedom. This is partly a consequence of the symmetries SN strongly constraining manyof the bifurcations. This means that one can readily find codimension one bifurcations withtwo or more dimensional centre manifolds and/or non-trivial constraints on the normal forms(see for example [10]). However it is also the topology of the torus that means that localbifurcations very often have global consequences.
Nonetheless the bifurcations described are for the most part generic in the context ofglobally coupled identical oscillators and hence will be both robust and model independent.
4.1 Results for higher numbers of oscillators
The bifucations for general N may be highly complicated though we now describe somegeneral properties of system (4) for arbitrary N ≥ 3.
1. This system has the origin as equilibrium states for any r, α. The origin is a sink
28

when α ∈ (− arccos(2r), arccos(2r)), degenerate saddle when α = ± arccos(2r) (allLyapunov exponents are zero), and a source for other α.
2. From [3] one has the following conclusions. The system has an invariant manifold(3) for any r, α. The centre of this manifold (point with ZN symmetry) is alwaysan equilibrium state. The system (4) has as invariant subspaces of dimension, k =1, · · · , N − 2 for clusters of oscillators in system (2). Thus we have ϕ1 = · · · =ϕj−1 = ϕj+1 = · · · = ϕN−1, j = 1, · · · , N − 1 as invariant lines, as well as ϕi = ϕj,i, j = 1, · · · , N − 1. These lines have SN−1 × S1 isotropy.
3. For r = 0 the system has only the origin, manifold M (N) and N saddle points asequilibrium states. Each of these saddle points belongs to one of N invariant linesdescribed above when α 6= ±π/2. The origin and manifold M (N) have opposite sta-bility and change it with the transcritical bifurcation and degenerate Hopf bifurcationrespectively when α = ±π/2. At this moment all trajectories of Kuramoto-Sakaguchisystem except manifold (3) are limit cycles or heteroclinic cycles.
4. System (4) has a transcritical/heteroclinic bifurcation when r = 12cos α and r ∈ [0, r],
where
r =N − 2
2√
2N2 − 4N + 4.
This bifurcation is a transcritical-pitchfork/heteroclinic for even N . All heterocliniccycles consist of N invariant lines (described in item 3) ) at this moment.
5. System (4) has a saddle-node/heteroclinic bifurcation for r ∈ [r, r] for some r < 0.5.At the moment of intersection of saddle-node and transcritical bifurcation lines in theparameter plane, saddle-node points occur within each of the invariant S3 × S1 linesat ϕ = π/2.
6. There exist values of parameters (α, r) such that system (4) has 2-dimensional sets ofheteroclinic cycles. For N = 3 this is point D in the parameter plane. For N ≥ 4 thisis at least the one point (π/2, 0) on (α, r) while for N = 4 it includes the line of thesaddle-node/heteroclinic bifurcation on invariant lines BE as well.
Beyond this we note that robust heteroclinic cycles giving extreme sensitivity to detuningappear in cases where N ≥ 5; see [5, 7]. Moreover the structure of these networks ofheteroclinic cycles can be highly nontrivial and may be generated by a wide variety ofbifurcations, only some of which are discussed here.
Acknowledgements
We thank the Royal Society for a visitor grant enabling OB to visit Exeter for March andApril 2006. We also thank the EPSRC for partial support via EP/C510771 (PA).
29

References
[1] V. Afraimovich, M.I. Rabinovich, P. Varona, International Journal of Bifurcation and
Chaos 14: 1195-1208 (2004).
[2] E. Akin. The general topology of dynamical systems, AMS Graduate studies in Mathe-matics Volume 1, (1993).
[3] P. Ashwin and J.W. Swift, J. Nonlinear Sci. 2, 69–108 (1992).
[4] P. Ashwin, G.P. King and J.W. Swift, Nonlinearity, 4, 585–603 (1990).
[5] P. Ashwin, O. Burylko, Y. Maistrenko and O. Popovych. Phys Rev. Letts 96:05410(2006).
[6] P. Ashwin and M. Timme. Nature 436:36-37 (2005).
[7] P. Ashwin and J. Borresen. Phys. Rev. E 70:026203 (2004).
[8] E. Brown, P. Holmes, and J. Moehlis. “Globally coupled oscillator networks” In:Perspectives and Problems in Nonlinear Science: A Celebratory Volume in Honor of
Larry Sirovich, E. Kaplan, J. Marsden, K. Sreenivasan, Eds., p. 183-215. Springer, NewYork, (2003).
[9] G.B. Ermentrout, A Guide to XPPAUT for Researchers and Students, SIAM Publica-tions (2002).
[10] M.Golubitsky and I. Stewart, The symmetry perspective. Birkauser (2003).
[11] D. Hansel, G. Mato and C. Meunier, Phys. Rev. E 48, 3470–7 (1993).
[12] S.K. Han, C. Kurrer and Y. Kuramoto, Phys. Rev. Lett. 75: 3190–3 (1995).
[13] Y.B. Kazanovich and R.M. Borisyuk, Neural Networks 12: 441–453 (1999).
[14] H. Kori and Y. Kuramoto, Phys. Rev. E, 63, 046214 (2001).
[15] H. Kori Phys. Rev. E, 68: 021919 (2003).
[16] Y. Kuramoto, pp420–422 of Springer Lecture Notes in Physics Volume 39. Springer,Berlin (1975).
[17] Y. A. Kuznetsov, Elements of Applied Bifurcation Theory Springer-Verlag, New York,1995,1998, 2004
[18] Y. Kuramoto, Chemical Oscillations, Waves and Turbulence (Springer-Verlag, Berlin,1984).
30

[19] Y. Maistrenko, O. Popovych, O. Burylko and P.A. Tass, Phys. Rev. Lett. 93, 084102(2004).
[20] S.H. Strogatz, Physica D, 143, 1–20 (2000).
[21] L.S. Tsimring, N.F. Rulkov, M.L. Larsen and M. Gabbay, Phys. Rev. Lett., 95, 014101(2005).
[22] E.A. Viktorov, A.G. Vladimirov and P. Mandel, Phys. Rev. E 62, 6312–7 (2000).
[23] K. Wiesenfeld, P. Colet, and S. H. Strogatz, Phys. Rev. E, 57, 1563–9 (1998).
[24] A. Winfree, The geometry of biological time Springer, New York (2001).
31

A 1 A 2
A 3
A4
A 5
O
a) b)
c)
A N
A N−1
A N−2
A 2
A
A 3
A 5
4
A A 1
N
A N−1
A 1
A 2
A 3
A 4
A 5
4A’
5A’
Figure 19: Structure of the set M (N) of antiphase points; see text for details.
A Structure of the set M (N)
Recall that
M (N) =
(θ1, ..., θN) :
N∑
j=1
eiθj = 0
.
Lemma 3 The set M (N) has dimension N − 2 for N ≥ 3.
Proof: We have N points on the circle that are constrained by formula∑n
j=1 exp(θj) = 0.Each of points exp(θi) could be considered as unit vector on the complex plane. The formulasays us that the sum of these vectors is zero, i.e. that these vectors make closed polygonA1A2...AN , where |AjAj+1| = |ANA1| = 1, i = 1, N .
These two interpretations are shown in Figure 19 a) and b). Thus we need to show thatpolygon A1A2...AN has N − 2 degree of freedom, i.e. that we can move N − 2 connectedsides of polygon A1AN−2 and other two AN−1AN , ANA1 will be dependent of place of theseprevious sides. This is obvious for N = 3 (equilateral triangle) and N = 4 (rhombus) but itis nontrivial for N ≥ 5.
32

Figure 19 c) illustrates the N = 5 case. Let us fix two sides A1A2 and A2A3 of pentagonA1A2...A5 in any position (two degrees of freedom). Then we can show that the position ofsides A3A4 and A4A5 are determined by position of side A1A5 (or point A5). Let us buildtwo circles CA1
and CA3with the centers in corresponding points. Points A5 and A4 must
be on these circles. Let us get two any different points A5 and A′5 on the circle CA1
andbuild circles with the centers in these points. As we can see the intersections of these circleswith circle CA3
give us two different points A4 and A′4 which complete the construction of
pentagon. The arbitrariness of the choice of point A5 proves the existence of the third degreeof freedom. Thus our manifold is three-dimensional in (θ1, ..., θ5)-space. For the case N = 6we can get three connected unit intervals A1A2A3A4 that can be disposed in any way onthe plane (this is always possible) and then we can construct interval A1A6 in two differentways and then construct two other intervals as it was for N = 5. This construction showsus that the manifold M (6) is 4-dimensional. And the same we obtain for arbitrary N . Ingeneral the distance between A1 and AN−2 cannot be bigger than 3, but this doesn’t limitthe possibility of the choice of N−3 free intervals and the construction of the polygon. QED
B Degeneracies for the model with r = 0
We consider the particular cases of the system (4) when r = 0, α = 0 (standard Kuramotomodel) and the more general r = 0 (Kuramoto-Sakaguchi model). One can fully describethe system in these two cases.
For r = 0, α = 0 the reduced Kuramoto system has only three types of equilibrium:
1. θi − θj = 0, i, j = 1, · · · , N , (this point is the origin for equation (4) and it is sink);
2. θi − θj = πk, i 6= j, k ∈ Z (this points are saddle points for reduced system (4) );
3. the invariant manifold of antiphase fixed points M (N) (this is a repellor).
For the Kuramoto-Sakaguchi system where r = 0, α 6= 0 we obtain only three types ofequilibrium states as well:
1. θi − θj = 0, i, j = 1, · · · , N ;
2. fixed points that belong to invariant sets θi = θj, i 6= j (they are all saddles);
3. the invariant manifold M (N).
Stabilities of sets 1) and 3) are always opposite and they change at the points α = ±π/2.In the general case (if parameters r and α are arbitrary) the set M (N−3) is invariant, butin contrast to previous cases it does not consist of only fixed points. Only the origin andpoint of uniformly distributed phases on the circle (θi+1 − θi = 2πk/N , k = 1, · · · , N) arethe permanent fixed points for any values of parameters in a general case. We can makeone remark concerning the stability of the origin of the system (4). The origin is sink when
33

α < α0, where α0 = arccos(2r0), r0 ∈ [0, 0.5], it is a degenerate saddle (with all Lyapunovexponents equal zero) for α = α0, and it is a source when α > α0.
34










![HETEROCLINIC ORBITS, MOBILITY PARAMETERS AND … dx. Constant steady ... [2, 30, 26]. We refer the readers to Fife’s ... We find that the heteroclinic orbits are perturbed but do](https://img.pdfslide.net/doc/110x75/5afc79c67f8b9a434e8c29ef/heteroclinic-orbits-mobility-parameters-and-dx-constant-steady-2-30.jpg)