Embed Size (px)
Citation preview

BioRobotics LaboratoryProf. Kenneth Salisbury

Group Foci
• Robotics and Haptics• Physical Devices• Rapid Prototyping• Real-time control• Human-Machine interaction
• Interfaces• Haptic• Stereo
• Paradigms• Physical Simulation
• Surgical Rehearsal• Skills Training and Assessment
Some History
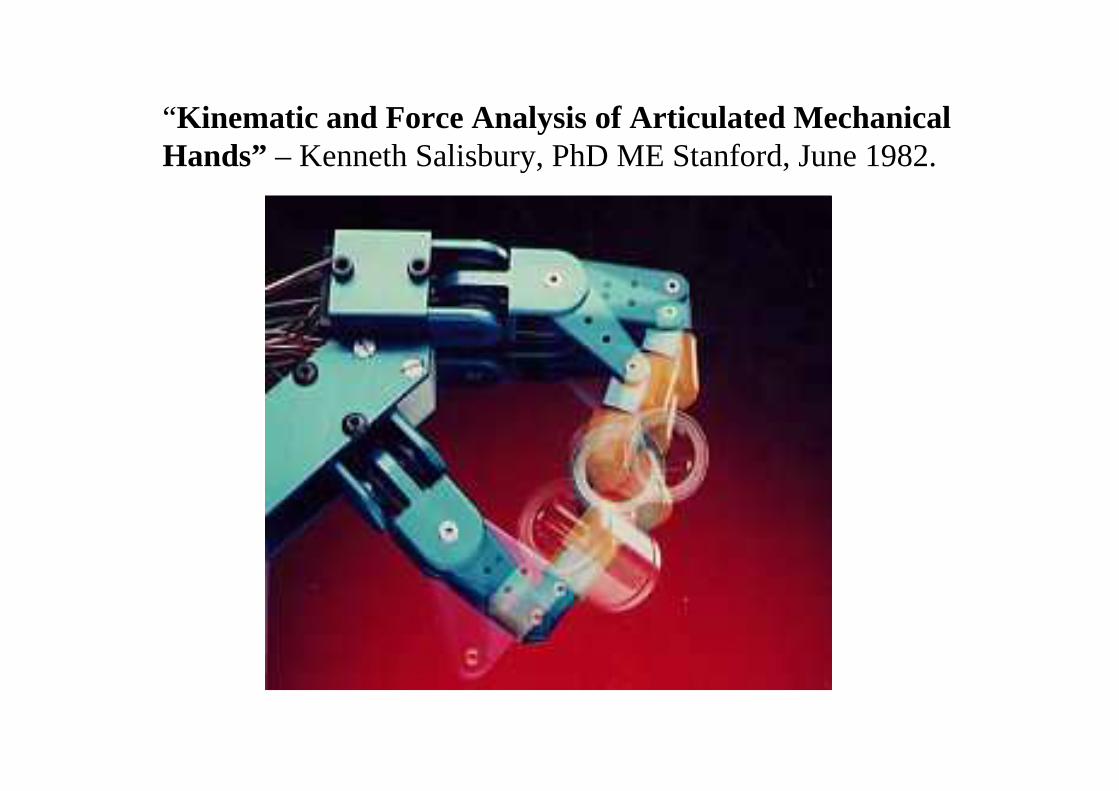
“Kinematic and Force Analysis of Articulated Mechanical Hands” – Kenneth Salisbury, PhD ME Stanford, June 1982.

Massie, Thomas H. `Design of a Three Degree of Freedom Force-Reflecting Haptic Interface,'' SB thesis, MIT EECS Department, May 1993.

Townsend, William T., `The Effect of Transmission Design onForce-Controlled Manipulator Performance,'' PhD. ME, MIT Apr. 1988.

Madhani, Akhil J. `Design of Teleoperated Surgical Instruments for Minimally Invasive Surgery ,'' Sept 1997.

Recent Graduates

F. Barbagli, "A Multi-Point of Contact Framework for Haptic Interaction", PhD dissertation, July 2002, Scuola Superiore S. Anna, Pisa, Italy. (co-advised with M. Bergamasco (ScuolaSuperiore S.Anna) and P. Dario (Univ. of Pisa) )

N. Diolaiti, "Robotic Interaction: Analysis and Control", PhDdissertation, PhD dissertation, May 2005, University of Bologna (co-advised with C. Melchiorri (Univ. of Bologna) and G. Niemeyer (Stanford) )

Morris Dan, PhD CS `Haptics and Physical Simulation for Virtual Bone Surgery,'' August 2006.

Sewell, Christopher, `Automatic Performance Evaluation in Surgical Simulation,'' PhD CS, Spring 2007.

Walker, Sean, `Robot Haptics: Object Recognition Through Dynamic Exploration,'' PhD CS, Winter 2009.

Camarillo, David, `Mechanics and Control of Tendon Driven Continuum Manipulators ,'‘ PhD ME Spring 2008.
Loewke, Kevin E., `Image Sequence Analysis for Dynamic and Time-Lapse Microscopy,'‘ PhD ME, Stanford, August 2009.

Salisbury, Curt, `Haptic Hardware: Evaluation, Design and Placement'' PhD ME, Stanford, September 1009.

We Like to Make Stuff
Current Projects

Robotic Real-Time Volumetric Ultrasound Guidance System for Radiation Therapy - Jeff Schlosser – ME PhD Candidate, NIH/DOD
4D US probe (I1)
3D US image stream
Ethernet (> 1 GB/s)
Bea
m g
atin
g
sig
nal
US-guidance workstation with haptic interface(I3)
US imagingsystem (I2)
Accelerator control console (I4)
Linear Accelerator (I5)LINAC
Probe position data (6 DOF)
Robot placing US probe (I8)
Robot Control (I7)
I6. Opticaltracker
Robot Control (I7)

Patient-Specific Simulation for Surgical RehearsalSonny Chan, CS PhD CandidateFellowship, VA Funding starts 4/10, NIH Funding Pending

Patient-Specific Simulation for Surgical RehearsalSalisbury, Blevins, and Hanrahan – Pending NIH review

Discover Magazine: http://discovermagazine.com/2009/nov/28-the-3d-simulation-that-lets-your-surgeon-practice-on-you

Wall-E: Visual Object Acquisition & Grasp Planning 23
Enhancing Tele-operated Robotic Operation
Intelligent Interaction
Eric Chu
Adam Leeper
Stanford University
October 2, 2009
Principle Investigator
Graduate Students
Ken Salisbury
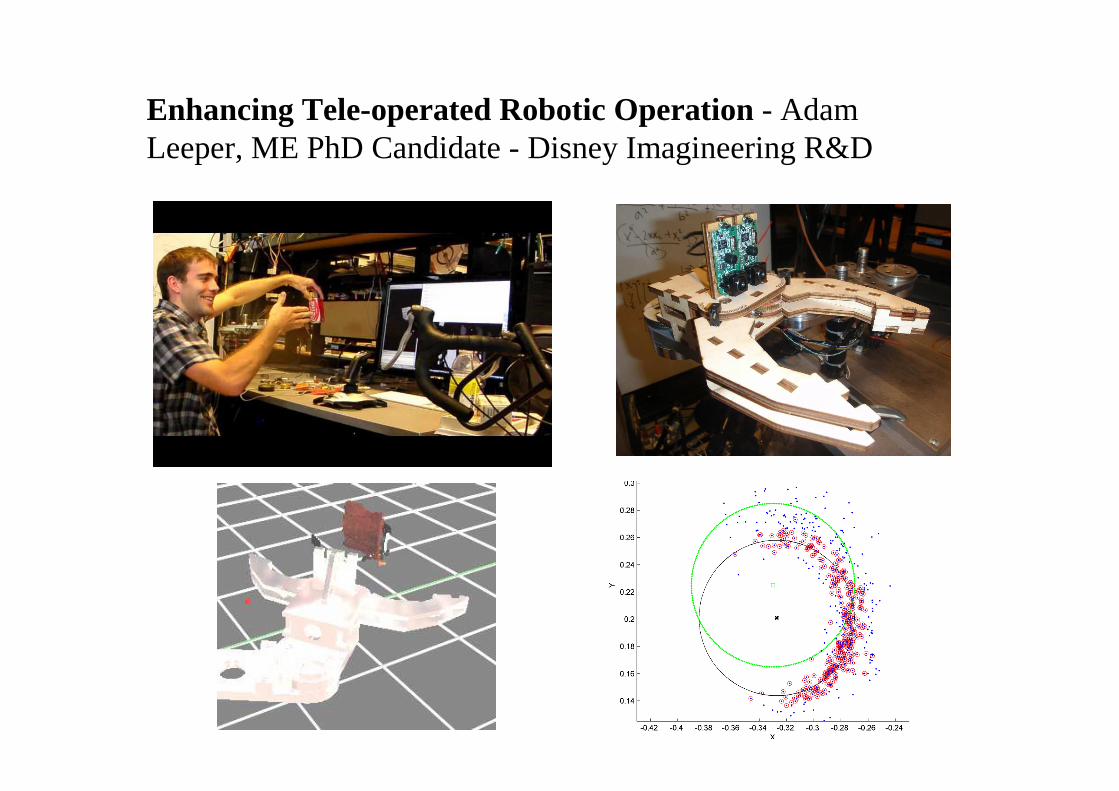
Enhancing Tele-operated Robotic Operation- Adam Leeper, ME PhD Candidate - Disney Imagineering R&D

Affordable RoboticsSupported by: Bosch Corporation
Lead Student: Ben Wilson, PhD candidate, Mech Engr
Student Advisors: Reuben Brewer PhD candidate, MechEngrMorgan Quigley, PhD candidate, Comp Sci
Faculty Advisors: Profs. Ng and Neimeyer

Cochlear Implant Technology– Joan Savall, PhD, on sabbatical from University of Navarra, Spain

Personal Robotics– www.willowgarage.com - Keenan Wyrobek, ME PhD Candidate; Eric Berger, CS PhD Candidate

Human-Robot Interaction
• Information Flow During Physical Contact– Touching and Being Touched– Taking and Giving– Leading and Being Led
• Gesture-based Communication– Recognition– Acknowledgment – Pacing and Negotiation– Intention Inference






![CMU Biorobotics Lab Deployment Reportbiorobotics.ri.cmu.edu/.../images/SnakeRobotZwentendorfReport.pdf · CMU Biorobotics Lab Deployment Report ... [Situational Awareness] ... The](https://img.pdfslide.net/doc/110x75/5aafe4ff7f8b9a22118dc53c/cmu-biorobotics-lab-deployment-biorobotics-lab-deployment-report-situational.jpg)






















