Embed Size (px)
DESCRIPTION
Here's a presentation I gave (for my Intro to Adaptive Systems course) of birds flocking together while following some simple but decentralized rules. Apart from following the simple rules of Separation, Cohesion and Alignment, I've also added some goal tending influences so that the organisms tend towards the circular object. All the code and simulation was run on Matlab using some slightly modified code from Conrad's pseudocode for boids (http://www.vergenet.net/~conrad/boids/pseudocode.html).Sudeep Pillai
Citation preview

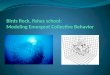
Background
• Natural and often seen, yet so intriguingo Discrete birds, but an overall fluidic motion
o Magnificent synchronized behaviors
• Each bird dependent on each othero Based on local perception, they control themselves
o No awareness of global perspective
o Seems like a distributed control
o Is it intentional??

• Formationso Classic “Flying V” formation
– Reduce overall drag force as compared to flying alone
– Upwash produces free lift allowing lower angle of attack
– Lead bird – Two flanking birds dissipate downwash
Intentional flocking

• Reduced Energy expenditureo Greater number cause further reduction in induced drag
– Birds towards the middle gain considerable advantage
– Flanking birds gain free lift through upwash
– Reduced induced drag for birds being flanked
– Research – 70% more flight time, reduced heart rates
– Lead bird – Two flanking birds dissipate downwash
• Communication & Cooperationo Mutual cooperation – Flock Rotations
Evolved over time
Efficient flying formation thereby increasing flight time
Distribution of responsibility within flock during rotations
The “Flying V” formation

• Protection from predatorso Statistically improved survival of gene pool from attacks
o Each creature has knowledge of its local perception
o Cry signals for predator warning increases reaction time
• Improved foragingo Larger effective search patterns
• Advantages for social and mating activities
More reasons to flocking

• Formation of efficient flying ordero Reduced Energy expenditure
o Effective communication among flock
o Improved knowledge and avoidance of predator
o Improved foraging
o Increased social and mating activities
• Emergence - Complex global behavior (flocking)
arising from simple local interaction
Emergent behavior

• Do we model emergence in behavior or the
result of emergence (i.e. flocking) ?o Relatively trivial (using current technology) to create a model
that simulates flocking (boids)
o Less trivial to model emergence and tracing the path towards
flocking
• Accomplishing • the former leads us to understanding the latter
• the latter is difficult, and very specific
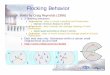
Modeling emergent behavior

• Basicso Separation, Alignment, Cohesion
• Slight modifications (In decreasing order of precedence)
o Collision Avoidance – avoid collision with nearby flockmates
o Velocity Matching – match velocity with nearby flockmates
o Flock Centering – stay close to nearby flockmates
• Additional modificationso Tendency towards goal, Limiting flock speed, Bounding
workspace, Perching, Obstacle avoidance, Boid neighborhood
Modeling boids

The Algorithm
flock_init_positions()
Structure b (boids)FOR EACH BOID b
b.position =25* [2*rand-1; 2*rand-1;2* rand-1];b.velocity = [0;0;0];
END
Main instance
Flock_init_positions ()LOOP
flock_draw_boids()flock_move()
END LOOP
Rule 1 : SeperationPROCEDURE rule1(boid bJ)
Vector c = 0;FOR EACH BOID b
IF b != bJ THENIF |b.position - bJ.position| < 100 THEN
c = c - (b.position - bJ.position)END IF
END IFENDRETURN c v1
END PROCEDURE
Rule 2: Velocity Matching PROCEDURE rule2(boid bJ)
Vector pvJ
FOR EACH BOID bIF b != bJ THEN
pvJ = pvJ + b.velocityEND IF
ENDpvJ = pvJ / N-1RETURN (pvJ - bJ.velocity) / 8 v2
END PROCEDURE
Rule 3: Flock centering PROCEDURE rule3(boid bJ)
Vector pcJ
FOR EACH BOID bIF b != bJ && |b.position - bj.position| < 8
THENpcJ = pcJ + b.position
END IFENDpcJ = pcJ / N-1RETURN (pcJ - bJ.position) / 100 v3
END PROCEDURE
Moving boids – flock_move()PROCEDURE
move_all_boids_to_new_positions()Vector v1, v2, v3Boid bFOR EACH BOID b
v1 = rule1(b)v2 = rule2(b)v3 = rule3(b)…..…..…..b.velocity = b.velocity + v1 + v2 + v3 + ….b.position = b.position + b.velocity
ENDEND PROCEDURE

The Algorithm (2) – Further additions
Predator interaction Same procedure as tendency towards goal, except a negative effect.
Return –v (from tend_to_goal) v6
FLOCK LEARNING Fitness functions being iteratively manipulated based on behavior needs
FOR EACH BOID bv1 = c1*rule1(b)v2 = c2*rule2(b)v3 = c3*rule3(b)…..
b.velocity = b.velocity + v1 + v2 + v3 + ….b.position = b.position + b.velocity
END
Tendency towards goal – flock_tendency()
PROCEDURE tend_to_goal(Boid b)Vector goalRETURN (goal - b.position) / 100 v4
END PROCEDURE
Limiting Speed – flock_limitvel()PROCEDURE limit_velocity(Boid b)
Integer vlimVector vIF norm(b.velocity) > vlim THEN
b.velocity = (b.velocity/|b.velocity|*vlim)END IF
END PROCEDURE
Workspace bound – flock bound()PROCEDURE bound_position(Boid b)
Integer Xmin, Xmax, Ymin……Vector vIF b.position.x < Xmin THEN
v.x = 10ELSE IF b.position.x > Xmax THEN
v.x = -10END IF…......Return v v5
END PROCEDURE
Moving boids – flock_move()PROCEDURE
move_all_boids_to_new_positions()Vector v1, v2, v3Boid bFOR EACH BOID b
v1 = rule1(b)v2 = rule2(b)v3 = rule3(b)…..…..…..b.velocity = b.velocity + v1 + v2 + v3 + ….b.position = b.position + b.velocity
ENDEND PROCEDURE

• Anti-flockingo Dispersion of flock due to predator
o Negating flock centering almost solves the problem
• Other behaviorso Negating separation – Boids run into each other
o Negating velocity matching – Boids have semi-chaotic
oscillations
• Different permutations of different behaviors with different fitness
functions not necessarily modeling flocks realistically
Other possibilities

• Trial and error and manual tweaking of
parameters using GAso Flocks can be tuned to exhibit interesting behavior
o Practical application may be limited
• Particle Swarm Optimization (PSO)o Shares evolutionary computation techniques such as GA
o Unlike GA, it has no evolution operators (crossover, mutation)
o Strategy
Initialized with random group
Closest bird to food leads the flock
Solution to the optimization is a single bird, not a group
Each bird‟s fitness is re-evaluated and optimized
Optimization

Simulation

• Modeling from the perspective of the birdo Model effects of other birds that are in its view (local)
o Model effects of aerodynamics (CFD)
o Does it support the “Flying V formation”?
• Implementing highway traffic based on
distributed behavior controlo Simple to implement
o Highly reliable
o Energy efficient
Future work

• Several models and techniques have been
developedo Some based on the behavior of flocks
o Some based on optimizing a specific task
• Similar to how we think of evolution, have
flocks „emerged‟ completely?o Flocking in groups can be beneficial, as is evident. Are we in a
transitional phase? Or will they „emerge‟ further to optimize
flocking behavior?
o Can we predict of any possible optimizations they may
possibly undertake?
My thoughts