-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
1/12
On the numerical damping of time integrators for
coupledmechatronic systems
Olivier Bruls *, Jean-Claude Golinval
Department of Aerospace and Mechanical Engineering (LTAS),
University of Liege, Chemin des Chevreuils, 1, B52/3, B-4000 Liege,
Belgium
Received 16 June 2006; received in revised form 15 August 2007;
accepted 19 August 2007Available online 1 September 2007
Abstract
The generalized-a time integrator is considered for the
simulation of mechatronic systems. In this context, the fundamental
concept ofnumerical damping is analysed for coupled sets of first
and second-order differentialalgebraic equations. First, it appears
that the alge-braic variables do not influence the spectral
properties of the dynamic variables. Second, we demonstrate that
the coupling between thedynamic variables does not influence the
high-frequency spectral response, so that the numerical damping can
be determined as usualfrom elementary characteristic polynomials.
Those results are exploited to assess the stability properties of
the scheme and to selectan algorithm with optimal damping
properties. 2007 Elsevier B.V. All rights reserved.
Keywords: Generalized-a scheme; Coupled problems; Flexible
multibody dynamics; Mechatronics; Numerical damping
1. Introduction
Numerical damping refers to the ability of a time inte-grator to
filter spurious effects at high-frequency. Forexample, the
higher-order modes of a finite element modeldo not represent
accurately the physical behaviour of amechanical structure, and
their contribution should ratherbe eliminated from the numerical
solution. In structuraldynamics, key contributions to the
development of dissipa-tive algorithms have been realized by
Newmark [1] and Hil-ber et al. [2]. Later, Chung and Hulbert [3]
have defined thefamily of the generalized-a methods, which includes
as spe-
cial cases the most important algorithms in this field. Formore
details, we refer to standard textbooks by Hughes [4]and Geradin
and Rixen [5], and also to the nonlinear anal-ysis by Erlicher et
al. [6]. For example, the CH-a scheme,presented by Chung and
Hulbert [3], combines the advan-tages of unconditional stability
(A-stability), second-orderaccuracy, adjustable numerical
dissipation at high-fre-
quency, and one-step implementation. Geradin andCardona [7,8]
have applied the generalized-a method forthe direct integration of
index-3 differentialalgebraic equa-tions (DAEs) in flexible
multibody dynamics. The presenceof kinematic constraints then leads
to a weak instability inthe numerical solution, which can, however,
be eliminatedby a small amount of numerical dissipation. In the
samecontext, global convergence analyses have been recentlyrealized
by Lunk and Simeon [9] and Jay and Negrut [10]for regularized
index-2 formulations, and by Arnold andBruls [11] for an index-3
formulation.
This paper proposes an extension of the generalized-a
method for the simulation of mechatronic systems. Indeed,the
development of a concurrent framework for the analy-sis and design
of controlled flexible mechanisms is moti-vated by the demand for
faster, lighter and moreaccurate machines and robots [12].
Mechatronic systemsare described by coupled sets of first and
second-orderDAEs, which cannot be solved in the time domain
usingthe original form of the generalized-a method. Negrutet al.
[13] have proposed to combine the generalized-ascheme for the
mechanical variables with a specific integra-tion formula for the
control state variables. However, their
0045-7825/$ - see front matter 2007 Elsevier B.V. All rights
reserved.
doi:10.1016/j.cma.2007.08.007
* Corresponding author. Tel.: +32 4 366 91 84; fax: +32 4 366 48
56.E-mail addresses: [email protected] (O. Bruls),
[email protected]
(J.-C. Golinval).
www.elsevier.com/locate/cma
Available online at www.sciencedirect.com
Comput. Methods Appl. Mech. Engrg. 197 (2008) 577588
mailto:[email protected]:[email protected]:[email protected]:[email protected]
-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
2/12
approach does not allow to combine second-order accu-racy with
numerical damping for the control state vari-ables. In contrast, in
previous publications [14,15], wehave shown that a monolithic
generalized-a scheme canbe implemented provided a slight
reformulation of the cou-pled equations of motion. The present
paper demonstrates
that this algorithm, which is based on an index-3 formula-tion
for the kinematic constraints, allows the introductionof
high-frequency numerical damping in an efficient way.
Compared to classical multistep or RungeKutta meth-ods [1619],
which require a reformulation of the coupledequations as a larger
set of first-order DAEs, our approachrepresents an interesting
alternative. Indeed, the general-ized-a method relies on different
integration formulae forthe displacement and velocity variables,
which directlyexploits the second-order structure of the equations
ofmotion. The potential benefits of the CH-a scheme comefrom its
remarkable stability properties, its optimalcombination of accuracy
at low frequencies and adjustable
high-frequency numerical damping, the simplicity of
itsimplementation, and its computational efficiency. How-ever, a
careful analysis is required to assess the stabilityand numerical
damping properties for coupled mechatron-ic problems.
In linear structural dynamics, the analysis of the stabil-ity
and damping properties of an algorithm usually relieson a
decomposition of the initial problem in terms ofuncoupled natural
modes. Since the integration schemewould lead to an equivalent
solution when applied to themodal equations, it is then sufficient
to analyse a scalar testproblem
q x2q 0where x represents a particular natural frequency. For
thisscalar problem, the eigenvalues of the numerical solutioncan be
computed explicitly from an elementary characteris-tic polynomial,
such as
f 12 hx2
4f 12 0 1
for the constant average acceleration scheme with step-sizeh.
For coupled mechatronic problems, it turns out that
thedecomposition into uncoupled modes is not possible, sothat the
eigenvalue analysis cannot be restricted to a simplescalar test
problem. Even though this fact appears as a leit-motiv throughout
this paper, we shall still attempt to relatethe spectral behaviour
of the numerical solution to elemen-tary polynomials. First, we
show that the numerical re-sponse can be decomposed in terms of
dynamic andalgebraic variables, and that the contributions of the
alge-braic variables are uncoupled. We then demonstrate thatthe
coupling between the dynamic variables does not influ-ence the
high-frequency response. Finally, those results areexploited for a
stability analysis and for the selection of analgorithm with
optimal damping properties.
After the description of the equations of motion and of
the integration algorithm in Sections 2 and 3, the linear
eigenvalue analysis is developed in Section 4. Then, the
sta-bility properties are discussed in Section 5, and the
selec-tion of optimal algorithmic parameters is addressed inSection
6. The paper ends with an illustrative exampleand some
conclusions.
2. Equations of motion
In a mechatronic system, the motion of the mechanismis driven by
a control system composed of actuators, sen-sors and control units.
The coupled equations of motionhave the general form [14,15,20]
Mqq gq; _q; t UTq k Lqyy;0 Uq; t;_x fq; _q; q; k; x; y; t;y hq;
_q; q; k; x; y; t;
2
where q is the n 1 vector of mechanical generalized
coor-dinates, k is the m 1 vector of Lagrange multipliers, x isthe
s 1 vector of control state variables, and y is thet 1 vector of
control output variables.
In Eq. (2), we have successively the dynamic equation forthe
mechanism, the kinematic constraints, the state equa-tion and the
output equation. M is the mass matrix, whichis not constant for a
multibody system with large rotations,g represents the internal,
external and complementary iner-tia forces, Lqy is a boolean
localization matrix and Lqyydenotes the actuator forces. The
control system is influ-enced by input measurements from the
mechanical system,which can be positions q, velocities _q,
accelerations q orinternal forces k. In our simulation software,
the controllerequations are constructed in a modular and systematic
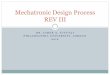
wayusing the block diagram language, as illustrated in Fig. 1.Since
the output y(i) of the block (i) can be an input variablefor other
blocks, the output equation is implicit in y.
Both the kinematic constraints U and the output equa-tion are
algebraic in nature. In the uncoupled case (e.g.Lqy = 0), it is
well-known that the differentiation indexassociated with the
mechanical subsystem is three, see Bre-nan et al. [18] or Hairer
and Wanner [19]. In contrast, pro-vided some regularity condition,
the control system isrepresented by a set of semi-explicit index-1
DAEs, see [14].
Fig. 1. Block diagram model of a mechatronic system.
578 O. Bruls, J.-C. Golinval / Comput. Methods Appl. Mech.
Engrg. 197 (2008) 577588
-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
3/12
Unlike in structural dynamics, the coupled Eq. (2) maybe
influenced by strongly nonlinear terms in the accelera-tion
variables q. However, if an additional output variableyj is defined
for each acceleration measurement qi, with theoutput equation yj
qi, the control equations can be refor-mulated as
_x fq; _q; k; x; y; t;y hq; _q; k; x; y; t Lyqq; 3
where Lyq is a boolean localization matrix. The advantageof this
reformulation will appear clearly in the following.
In order to define a monolithic generalized-a timeintegrator,
the state equation is transformed into asecond-order equation by
introducing the auxiliarydynamic variables z
zt :
Zt
0
xsds:
The value of z is only meaningful at the velocity level(_z x)
and at the acceleration level z _x. The coupledequations of motion
become
cMpp gp; _p; t 4with the vector p, the constant matrix cM and
the vector g
M
Mq
z
y
p
0
0 0
0 0 0
0 00
0 0
00
f
y h
yTq +
+
where Is denotes the identity matrix of dimension s.
3. Time integration algorithm
The Newmark implicit formulae, which have been pro-posed for the
time integration of second-order ODEs, resultfrom a truncated
Taylor series expansion of the displace-ments and velocities with
respect to the time step size h
pi1 pi h _pi h21
2 b
ai h2bai1;
_pi1 _pi h1 cai hcai1;5
where b and c are numerical parameters. In the originalNewmark
scheme, the vector a is simply equal to the accel-eration p,
whereas for the generalized-a method, it is de-
fined by the linear recursion
1 amai1 amai 1 afpi1 afpi; a0 p0; 6where am and afare additional
numerical parameters. If themass matrix is constant, a
multiplication of this last equa-tion by cM leads to the modified
dynamic equilibrium1 amc
Ma i1 amcMa i 1 afgi1 afgi: 7
A predictorcorrector procedure can be implemented inorder to
solve Eqs. (5) and (7) for p, _p, and a at each timestep. If the
mass matrix is not constant, the integrationscheme should be
implemented without resorting toEq. (7), see [11] for a detailed
discussion.
The formulation of the simulation algorithm in terms ofthe
global vector p allows compact and elegant notations,which is very
appealing for the purpose of our theoreticalinvestigations.
However, a batch implementation of thescheme would involve numerous
useless operations sinceseveral components of the vectors p, _p or
p are not physicallymeaningful. Indeed, the artificial variables
_k, k, z, _y and y do
not influence the coupled equations of motion (3) and
theircomputation should be avoided for the sake of
efficiency.Therefore, the Newmark integration formulae for k and
yshould be omitted, as well as the Newmark formula at posi-tion
level for z. Likewise, those artificial contributions willalso be
neglected at several points of the following theoret-ical
developments.
4. Linear eigenvalue analysis
Following the arguments of Chung and Hulbert [3], thefour
algorithmic parameters b, c, am and af should beselected in order
to obtain an optimal compromise betweenaccuracy at low frequencies
and stability at high frequen-cies. In order to analyse the
spectral properties of the gen-eralized-a scheme, we consider the
linear and homogeneousmechatronic system without mechanical
dampingcMp bC _p bKp 0 8with
M
M
C
0 0 0 0
00
0
0
0
0
0
0 0
0 0000
0 0
0 0
0 0
0
0
0
0
0
0
0
0
00
T
=
=
=
J
The matrix A is the linear state matrix of the control sys-tem,
K is the mechanical stiffness matrix, B is the matrix oflinear
constraints, whereas Gxq, Gy _q, Gyx, Gxq, Gxy and Gyq
represent coupling terms. The matrix J is different from the
O. Bruls, J.-C. Golinval / Comput. Methods Appl. Mech. Engrg.
197 (2008) 577588 579
-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
4/12
identity if the output equation is implicit in y. Since
thecontrol system contributes to the matrix bC, the general-ized-a
algorithm should be analysed in the presence of anon-negligible
damping matrix. The eigenvalues of thenumerical response are the
solutions to the generalizedeigenvalue problem
f
1 afbK 1 afbC 1 amcMI 0 bh2I0 I chI
26643775
vp
v _p
va
26643775
afbK afbC amcM
I hI 12 b h2I
0 I 1 chI
26643775
vp
v _p
va
26643775;
where I is the identity matrix of dimension n + m + s + t.The
first line corresponds to the modified dynamic equilib-rium, the
second and the third, to the Newmark formulae
at position and velocity levels, respectively. Introducingthe
polynomials
Pamf : 1 amf am; Pcf : cf 1 c;Paff : 1 aff af; Pbf : bf 12 b;P1f
: f 1;the characteristic equation is reorganized as
det
Paffh2bK PaffhbC PamfcM P1fI I PbfI
0 P1
f
I
Pc
f
I
2664
3775
0:
9Due to the complex structure of the matrices bK, bC andcM, this
expression is not convenient for analytical investi-
gations. Instead, fundamental concepts can be introducedif the
analysis is first restricted to a scalar problem.
4.1. Elementary characteristic polynomials
Elementary characteristic polynomials are defined forthe
second-order scalar system
p
r _p
l2p
0;
10
where r and l are, in general, complex parameters. Aftersome
developments, Eq. (9) becomes
Pq0 hrPq1 hl2Pq2 0
with the notations Pq0 : P21Pam , Pq1 : P1PafPc andP
q2 : PafPc P1Pb. The polynomials Pq0, Pq1 and Pq2 are
the so-called generating polynomials of the algorithm. Inthe
theory of multistep methods for first-order ODEs,two generating
polynomials are sufficient for the eigenvalueanalysis. One
additional generating polynomial is requiredhere because the
Newmark integration formulae are de-fined for second-order systems,
and are not equivalent for
the displacement and for the velocity variables.
The scalar undamped mechanical system is a subcase ofEq. (10),
with r = 0 and l = jx (x 2 R). The characteristicpolynomial
becomes
Pqhx : Pq0 hx2Pq2:
The scalar control system is another subcase of Eq. (10),
with l = 0. This appears more clearly if the standard
stateequation _x rx is recasted as z r_z 0. After removingthe
fictitious contribution ofz at displacement level, we get
Pxhr : detPaffhr Pamf
P1f Pcf !
Px0 hrPx1:
The polynomials Px0 : P1Pam and Px1 : PafPc are not inde-pendent
from Pq0 and P
q1 since we have: P1P
xi Pqi (i= 0,1).
Let us note that the characteristic polynomial for
thedisplacement variables Pqhx is of degree three, whereas
thecharacteristic polynomial for the state variable Pxrh is
ofdegree two. This observation is consistent with the well-known
analogy between the generalized-a method and lin-ear multistep
methods [4], i.e. the generalized-a scheme isequivalent to a linear
three-step formula for the displace-ments and to a linear two-step
formula for the velocities(as well as for the state variables since
x _z).
Finally, it is convenient to define asymptoticpolynomials:
Pq1f : limhx!1
Pqhxf
hx2 Pq
2f PafPc P1Pb;
Px1f : limhr
!1
Pxhrfhr
Px1f PafPc:
We already note the special role of Paf, which appears inboth
Pq1 and P
x1.
4.2. Contribution of the algebraic variables
In order to transform the initial matrix problem (9) intoa
scalar problem and refer to the elementary polynomialsdefined
above, we would like to diagonalize the initial lin-ear equations
of motion using a transformation into modalcoordinates. Observing
that the integration algorithmwould lead to an equivalent solution
when applied to the
transformed system, the spectral analysis could then beachieved
independently for each scalar subsystem. Such adiagonalization is
trivial for an explicit state space system
without outputs (bK 0 and cM regular), or for anundamped and
unconstrained mechanical system (bC 0and cM regular). In general,
it is impossible to diagonalizea system with arbitrary matrices bK,
bC and cM. However,due to the special structure of the coupled
equations ofmotion (8), the following result, demonstrated in
AppendixA, can be used in order to isolate the contribution of
thealgebraic variables.
Under some reasonable assumptions, the linear system
(8) can be transformed into
580 O. Bruls, J.-C. Golinval / Comput. Methods Appl. Mech.
Engrg. 197 (2008) 577588
http://-/?-http://-/?-http://-/?-http://-/?-
-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
5/12
qr X2qr Crxx 0;qc qk Ccxx 0;qc 0;x Rx Pxrqr Dxr _qr !xrqr
Pxcqc
Dxc _qc !xcqc 0;y Cyxx Pyrqr Dyr _qr !yrqr Pycqc
Dyc _qc !ycqc 0
11
with the transformed state variables x 2 Rs and outputvariables
y 2 Rt. The coordinates qc 2 Rm are interpretedas constrained
coordinates, qk 2 Rm, as Lagrange multipli-ers, and qr 2 R"n, as
remaining free dofs ("n : n m). Thematrices Crx, Ccx, Pij, Dij, !ij
(ij = xr, xc, yr, yc) representthe coupling between the mechanical
and the control sys-tems, whereas the matrices R and X2 are
diagonal
R diagr1; . . . ;rs; X2 diagx21; . . . ;x2"n:
Each value xi 2 R is a mechanical natural frequency,and each
value ri 2 C is a pole of the control system. A dis-tinction should
be made between the dynamic variables qr
and x* and the algebraic variables qc, qk and y*. Let us
showthat the contributions of the algebraic variables to the
char-acteristic Eq. (9) are uncoupled. If the matrix involved
inthis equation is reorganized by block, and if
non-physicalcontributions are eliminated, an equivalent
characteristicequation is obtained
det
U rr 0 0 U rx 0
0 U
cc
U
c
U
cx
00 U c 0 0 0
U xr U xc 0 U xx 0
U yr U yc 0 U yx U yy
= 0
with the submatrices
Urr :Paffh2X2 0 PamfI"n
P1fI"n I"n PbfI"n
0 P1fI"n PcfI"n
2664
3775;
Urx :PaffhCrx 0
0 0
0 0
26643775;
Ucc :0 0 PamfIm
P1fIm Im PbfIm
0 P1fIm PcfIm
26643775;
Ucx :PaffhCcx 0
0 0
0 0
2
664
3
775;
Uck : Ukc T : Paffh2Im
0
0
264375;
Uxx : PaffhR PamfIs
P1fIs PcfIs !
;
Uij : Paffh2Pij PaffhDij Pamf!ij0 0 0
" #ij xr; xc; yr; yc;
Uyx : PaffhCyx; Uyy : PaffIt:After some algebra, the
contribution of the algebraic
variables can be extracted. Defining P1..."n;1...s as the
charac-teristic polynomial associated with the dynamic
variables
1 n, 1 s () := det (U* ) with U * :=
U rr U rx
U xr U xx, 12
the characteristic polynomial takes the final expression
PaftPafPq1mP1..."n;1...s 0: 13
Clearly, Paf represents the contribution of one outputvariable
or of one Lagrange multipliers, whereas Pq1 repre-sents the
contribution of one constrained coordinate. Sinceany root ofPaf is
also a root ofP
q1, one concludes that the
spectral contribution of the algebraic variables is fully
rep-resented by the polynomial Pq1. In contrast, the analysis ofthe
eigenvalues associated with the dynamic variablesrequires the
development of the polynomial P1..."n;1...s, which
turns out to be a challenging task.
4.3. Contribution of the dynamic variables
Since the matrix U* is not diagonal, the polynomialP1..."n;1...s
cannot be decomposed in terms of uncoupledmodes, and the
investigations cannot be continued withoutfurther assumptions. More
detailed theoretical results canbe obtained for three particular
subcases developed hereaf-ter: a scalar coupled system, an
uncoupled system and theasymptotic situation of a system with very
stiff compo-nents. Using those partial results, practical
guidelines willbe proposed for the selection of optimal
algorithmicparameters.
First, a scalar coupled system with one mechanical var-iable q
and one state variable x is analysed. The character-istic
polynomial (12) can be formulated in terms of thegenerating
polynomials:
P1;1f PqhxPxhr hCPx1 h2PPq2 hDPq1 !Pq0
:
For a given algorithm, this polynomial depends para-metrically
on several variables: hx, hr, h3CP, h2CD andhC. Thus, even for a
scalar problem, the properties ofthe numerical response should be
investigated in a rather
high-dimensional parameter space.
O. Bruls, J.-C. Golinval / Comput. Methods Appl. Mech. Engrg.
197 (2008) 577588 581
-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
6/12
Second, if Crx = 0 (equivalent to Urx = 0) orP
xr = Dxr = !xr = 0 (equivalent to Uxr = 0), a block trian-gular
structure appears in U*, indicating an uncoupling inthe eigenvalues
of both dynamic subsystems
P1..."n;1...s detUrr detUxx:
Since each subsystem has a diagonal structure, we obtain
P1..."n;1...s Y"nj1
Pqhxj
fYsk1
Pxhrkf:
Hence, all eigenvalues of the numerical solution can
bedetermined from the fundamental polynomials Pqhx andPxhr.
Third, in the presence of stiff dynamics in the mechanicalsystem
and/or in the control system, the characteristicpolynomial
satisfies the following properties, which aredemonstrated in
Appendix B
limxj!1P1..."n;1...s
hxj2 Pq
1P
1...j..."n;1...s;
limrj!1
P1..."n;1...s
hrj Px1P1..."n;1...j...s;
limh!1
P1..."n;1...s
h2"ns Pq1"nPx1sj:
14
P1...j..."n;1...s (resp. P1..."n;1...j...s) is the determinant
of the re-duced system after elimination of the contribution of
qj(resp. xj), and j is a scalar constant depending on X, R,C and P.
This implies that the coupling does not influencethe asymptotic
behaviour of the eigenvalues; we shall referto this result as the
asymptotic separation principle. If an
algebraic variable is interpreted as the limit case of a
dy-namic variable with a high-frequency, the asymptotic sepa-ration
principle confirms that its contribution to thecharacteristic
polynomial is uncoupled. For h ! 1, theasymptotic expression of the
characteristic polynomial (13)is thus
PaftPafmPq1nPx1s 0;which clearly emphasizes the separate
contribution of eachgroup of variables.
To summarize the linear eigenvalue analysis, the polyno-mials
Pqhxf and Pxhrf fully characterize the numericalsolution in the
special case of uncoupled problems. Forcoupled problems, they still
allow to characterize theasymptotic behaviour of the eigenvalues.
Therefore, thenumerical damping at high-frequencies, which is
requiredto stabilize the stiff and the algebraic components
duringthe simulation, can be analysed from those
fundamentalpolynomials.
5. Stability analysis
In the linear regime, the numerical solution is stable if allthe
roots of the characteristic polynomial are strictly insidethe unit
circle (
jfj
j< 1), and it is unstable if one root is
strictly out of the unit circle (jfjj > 1). If some roots
are
on the unit circle, the numerical solution may be stableor
unstable. An algorithm is unconditionally stable if itleads to a
stable numerical solution when applied to anystable dynamic
system.
Due to the difficulty to decompose the characteristicpolynomial
in the general case, we are only able to guaran-
tee unconditional stability for uncoupled problems. Asshown in
the preceding section, it is then sufficient to ana-lyse the roots
fq1;2;3hx ofPqhxf and the roots fx1;2hr ofPxhrf. Let us define the
spectral radius associated withthe mechanical variables and with
the state variables:
qqhx : maxfjfq1hxj; jfq2hxj; jfq3hxjg;qxhr : maxfjfx1hrj;
jfx2hrjg:The algorithm is unconditionally stable for
uncoupledproblems if (sufficient conditions)
qqhx < 1 8x 2 R; 15qx
hr
< 1
8r
2C
:
16
We also define the spectral radii at infinity
qq1 : limhx!1
qqhx;qx1 : lim
hr!1qxhr;
q1 : maxfqq1;qx1g:qq1, q
x1 and q1 can be interpreted as amplification factors
which are related with the numerical damping of the algo-rithm
in the high-frequency range. A spectral radius equalto 1 indicates
the absence of numerical damping, whereas avalue of 0 means
asymptotic annihilation of the high-fre-
quency response.For the undamped Newmark scheme, which is
charac-
terized by qq1 qx1 q1 1, several eigenvalues lie onthe unit
circle. According to the standard stability theory,the numerical
solution is marginally stable if the multiplic-ity of the roots on
the unit circle is equal to the dimensionof the corresponding
eigensubspace. This multiplicity con-dition is usually satisfied in
the unconstrained case (m = 0),but Cardona and Geradin [7] have
shown that it is not ver-ified for constrained systems (m > 0).
Therefore, a reason-able amount of numerical dissipation is
necessary toavoid a weakly unstable solution in the presence of
kine-matic constraints.
For coupled mechatronic problems, we deduce from theasymptotic
separation principle that the high-frequencynumerical damping of
the algorithm is not affected by thecoupling, and that stability
with respect to any stiff compo-nent is still guaranteed by the
conditions (15) and (16). Inthe low-frequency range, stability is
also expected as a con-sequence of the convergence of the numerical
solution tothe exact solution, which is supposed to be stable.
6. Optimal choice of the algorithmic parameters
Four parameters (c, b, afand am) have to be selected in
order to optimize the accuracy and stability properties of
582 O. Bruls, J.-C. Golinval / Comput. Methods Appl. Mech.
Engrg. 197 (2008) 577588
http://-/?-http://-/?-
-
8/2/2019 Bruls and Golinval 2008 - On the Numerical Damping of
Time Integrators for Coupled Mechatronic Systems
7/12
the integration algorithm. From an analysis of the localerror,
one obtains the condition for second-order accuracy
c 12
afm
with afm = af am. Moreover, ifb satisfies
b 14
c 12
2; 17
all roots ofPqhxf become real at infinity, which is optimalfor
numerical dissipation, as explained by Chung and Hul-bert [3]. We
note that the roots of Pxhrf become real atinfinity whatever the
choice ofc and b.
The remaining part of this section is dedicated to theselection
of the parameters af and am. For this purpose,we focus on the
uncoupled case, so that it is sufficient toanalyse the polynomials
Pqhxf and Pxhrf. At infinite fre-quencies, their roots are given
by
fq11 fx11 f11
af1 af ;
fq
2;31 1 afm1 afm ; f
x21
1 2afm1 2afm :
For stability, the condition q1
< 1 is equivalent to
am < af