Embed Size (px)
Citation preview

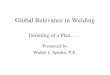
Buckling of Legs Derailing
Seismic Damage for Quayside Crane in the case of Hanshin(Japan) Earthquake
22

Purpose
Principle
Natural vibration period of QC is much longer than conventional one↓
Seismic acceleration is much smaller in this frequency band↓
Response to seismic applied worked to the crane can be dramatically reduced
Purpose ・ Principle
■ Reduce the stress to the crane legs→ No need to strengthen the crane body
■ Restrain the locking motion→ Prevention of derailing
■ Reduce the reaction force to the ground, container yard■ Maintain the function and ensure the safety to crane after earthquake
23

Seismic Isolation System
24
VTR

Automated RTG
25

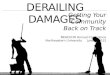
Automated RTG by Mitsubishi
Mitsubishi Heavy Industries, Ltd. offers the world first automated RTG. Automated Gantry travel / positioning Automated Container picking / stacking Remote operation from Control Room
→ Multiple RTGs operation possible by one operator !
MagicEye
Anti-collision sensor
Sway sensortarget
MagicEye
Sway sensor
Auto steering sensor
Bay sensor
Bay sensor
Autosteeringmagnetic line
Bay mark
Bay mark
Gantry travel encoder
Auto steering sensor
Gantry travelanti-collision sensor
Gantry travelanti-collision sensor
Gantry travelanti-collision sensor
Controller
Stack profile sensor
Magic Eye achieves automated picking / stacking Image sensors installed at corners of spreader detect the target container edge to find accurate container position directly.
Stack profile sensors achieveFast / Safe / Reliable Operation Stack profile sensors installed on the girder detect the stack profile. The optimized path control for Hoisting / Lowering and Trolley Travel is achieved with the measured stack profile.
Gantry Travel & Positioning Gantry travels on magnetic lane line within ±2" auto-steering with magnetic sensors. Gantry positioning is achieved on Bay mark with positioning sensor.Remote operation Remote operation from control room can be achieved with help of these automated technology. An operator can operate Multiple RTGs by monitoring CRT.
26

Automated RTG System
< Automated Operation Zone>
Chassis with driver Automated guided vehicle
Automated Operation
Manual Operation
Automated Operation
27

Automated RTG System
28
1. Magic Eye ( Automated picking and stacking ) - Relative position sensing device based on Image processing - Fast positioning and landing of the container to the target slot
2. Auto steering system - Gantry travel
3. Stack Profile System - Safety operation for preventing to interfere stacked container
Girder accelerometer
Camera for monitoring under trolley (Sway sensor)
Magnetic sensor for auto steering
Guide line for auto steering
Magic Eye
Stack profile sensor

Magic Eye
Sensing Device
1. Magic Eye
29
Detection of lower container position by Image processing technique.

Magic Eye View during operation
Target containerLifted container
1. Magic Eye
30

![HANSHIN hanshin-dept.jp/ *661-0976 06 …HANSHIN *661-0976 06-6498-9500 'EVERGREEN 'Yaoog¥D) (130B) 43t (40g) 'SWEETS MARKET ÖT835b 35'b#ä] (IOOg¥D) ' (loog½D)(àoogx) (52 g](https://img.pdfslide.net/doc/110x75/5e83093735719f427506a66f/hanshin-hanshin-deptjp-661-0976-06-hanshin-661-0976-06-6498-9500-evergreen.jpg)