Embed Size (px)
Citation preview
Building Linux Kernel for Raspberry Pi
Hannu Flinck
12.12.2013
Why to change kernel?
• When to change to new kernel? • Need to have new
• memory management, • scheduling, • interrupt handling, • protocol stacks, • GUI • updated System on Chip (SoC) features.
• Full blown porting is a quite large task: – starting from boot loader, all HW depended code (drivers) – compiling the kernel, preferably in an efficient machine (i.e. not RPi) =>
leads to cross compilation – needs proper tool chain and test environment: e.g QEMU, Yocot in this
case
• Focus on building the Linux kernel for Raspberry Pi – ARM1176JFZ-S processor with BCM2835 System on Chip (SoC)
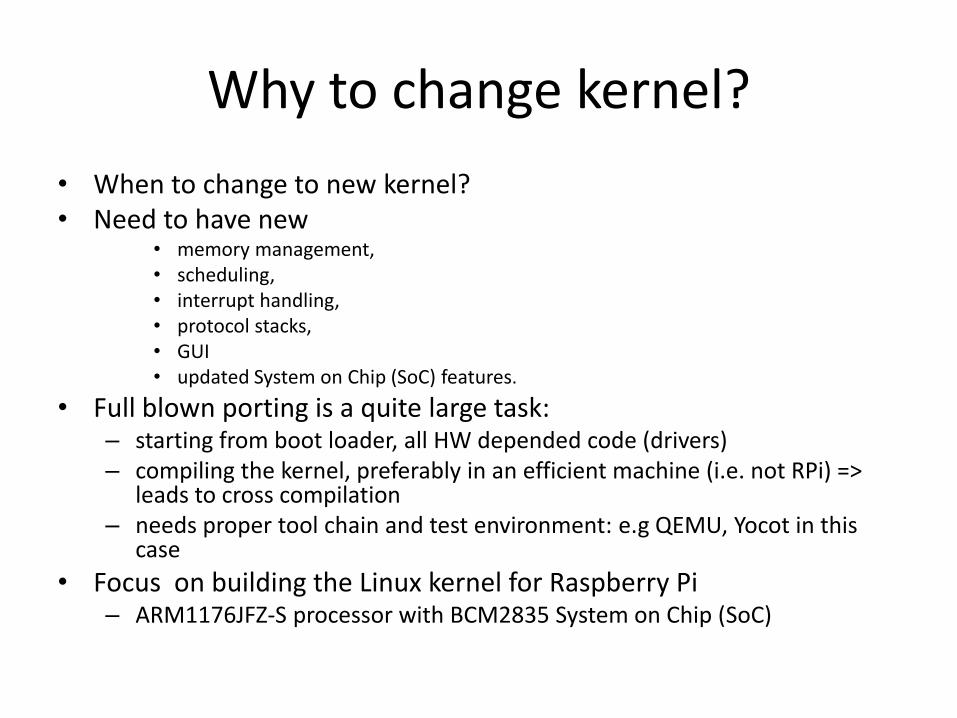
Linux internals Linux kernel can be divided into
3 levels:
• system call interface (SCI) – located in /linux/kernel and /linux/arch
• architecture-independent level – PM, MM, VFS, NET
• architecture-dependent – In /linux/drivers and /linux/arch (Board
Support Package)
Linux Kernel Makefile structure
• Organized in a hierarchy of five levels: • Makefile the top Makefile in /linux.
• .config the kernel configuration file.
• arch/$(ARCH)/Makefile architecture specific
Makeflies
• scripts/Makefile.* common rules etc. for all kbuild
Makefiles to autogenerate files.
• kbuild Makefiles there are about 500 of these.
• The top Makefile takes .config as an input • builds the kernel recursively
• A successful kernel building process will result into two major products: the resident kernel images (vmlinux, and architecture specific targets) and modules.
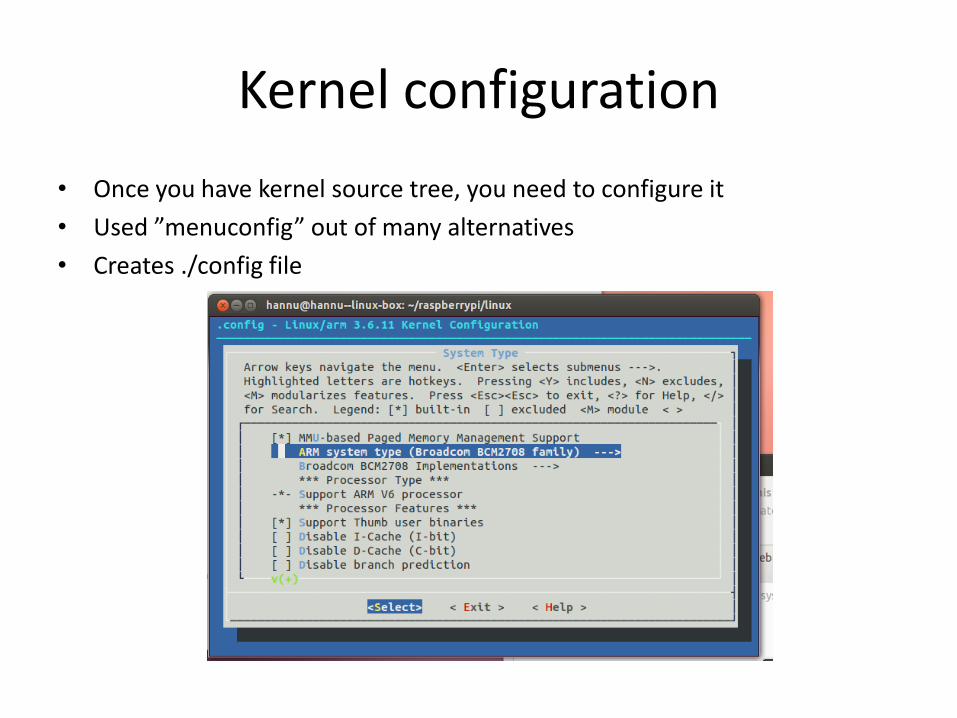
Kernel configuration
• Once you have kernel source tree, you need to configure it
• Used ”menuconfig” out of many alternatives
• Creates ./config file
ARM Specific files
• Linux kernel 3.6.11 contains generic ARM code in the following subdirectories: – boot, common, configs, kernel, lib, mm, net, nwfpe, vfp, oprofile and tools
– After compilation both compressed and uncompressed images in boot
• In arch/arm: – machine specific directories (mach-*)
– mach-bcm2708 contains SoC specifics
• For arm architecture a ”machine type” number is defined for each board in arch/arm/tools/machine-types file: – BCM2708 machine number is “3138
– Used in compile time to generate header file, include/asm-arm/mach-types.h.
– boot process to look for the right “machine_desc structure”
Machine structure macro • In /arch/arm/mach-bcmbcm2708/bcm2708.c • Bootloader passes the machine type number in register r1 to the kernel start up code,
arch/arm/kernel/head.S, that is kernel start up code for all 32-bit CPUs. • This code calls __lookup_machine_type in arch/arm/kernel/headcommon to look for the
machine_desc structures. If the requested machine number is found the machine descriptions are known and the boot process continues
MACHINE_START(BCM2708, "BCM2708") /* Maintainer: Broadcom Europe Ltd. */ .map_io = bcm2708_map_io, .init_irq = bcm2708_init_irq, .timer =&bcm2708_timer, .init_machine = bcm2708_init, .init_early = bcm2708_init_early, .reserve = board_reserve, .restart = bcm2708_restart, MACHINE_END
Notes on Kernel Porting
• Kernel.org maintains vanilla Linux kernel
– No drivers nor modules for the Broadcom SoC
• Linux kernel maintained for Raspberry in https://github.com/raspberrypi/linux
• Diff –r /vanilla linux-3.10.20 kernel rpi-3.6.y.tar.gz/linux/kernel:
– 1688 files that are only in linux-3.10.20/arch, but not in the raspberry/linux/arch
– 1600 files only in raspberry/linux/arch and
– 4289 files under /arch that have changes
• problematic parts of the Raspberry Pi code that haven't been upstreamed: the dwc_otg USB driver, and the VCHIQ driver used for talking to the GPU
QEMU
• (Basic compilation skipped, see the article)
• QEMU: a generic open source machine emulator and virtualizer
• It allows to run unmodified operating system in a virtual machine but still uses the host devices.
• It is based on a dynamic translation of the target instruction set to the host instruction set.
• QEMU runs on Linux, Windows and Mac OS X.
QEMU (cont.)
• CPU emulator (x86, x86-64, PowerPC, ARM and Sparc) • Emulated devices (e.g. VGA display, 16450 serial port, PS/2
mouse and keyboard, IDE hard disk, NE2000 network card, ...)
• Generic devices (e.g. block devices, character devices, network devices) used to connect emulated devices to the host devices
• Machine descriptions (e.g. PC, PowerMac, Sun4m) instantiating the emulated devices
• Debugger • User interface • QEMU can be run in two modes either in user space
virtualizer mode or full system emulation mode.
Compiling for QEMU
• RaspberryPi CPU is ARM1176JZF-S (ARMv6k) which is not yet supported in most QEMU distros => need to build QEMU for Rpi
• Cannot emulate Raspberry Pi's General Purpose Input Output (GPIO) facilities and GPU
• Add two compression libraries and simple DirectMedia Layer development library – $sudo apt-get install git zlib1g-dev libsdl1.2-dev
• Then we need to add pixel-manipulation library for X and cairo: – $sudo apt-get install libpixman-1-dev
• clone QEMU – $git clone http://git.qemu.org/git/qemu.git
Compiling for QEMU (cont.)
• Configure: – $./configure --target-list="arm-softmmu arm-linux-user" --enable-sdl
--prefix=/usr
• Add: git submodule update –init dtc – $ make
– $ sudo make install
• Check that arm1176 support is in place: – $ qemu-system-arm -cpu
• Get Raspberry disk image from http://www.raspberrypi.org/downloads • The image needs to be edited to disable dynamic endianness switching • Mount the image with two partitions:
– sudo mount -t vfat -o loop,offset=4194304 ~/qemu_vms/2013-09-25-wheezy-raspbian.img /mnt/img1
– sudo mount -t vfat -o loop,offset=62914560 ~/qemu_vms/2013-09-25-wheezy-raspbian.img /mnt/img2
• Edit: sudo nano /mnt/img2/etc/ld.so.preload • Comment out line “/usr/lib/arm-linux-gnueabihf/libcofi_rpi.so”.
Compiling for QEMU (cont.)
• Get Linux kernel with git clone https://github.com/raspberrypi/linux.git
• Get patch for ARM11(ARMv6) Versatile board: – $ wget http://xecdesign.com/downloads/linux-
qemu/linux-arm.patch
– $ patch -p1 -d linux/ < linux-arm.patch
• We need to add manually the PCI host bridge and LSI53C895A PCI SCSI Host Bus Adapter with hard disk and CD-ROM devices to the emulated Versatile baseboard – $ cd linux
– $ make ARCH=arm versatile_defconfig
– $ make ARCH=arm menuconfig
Compiling for QEMU (cont.)
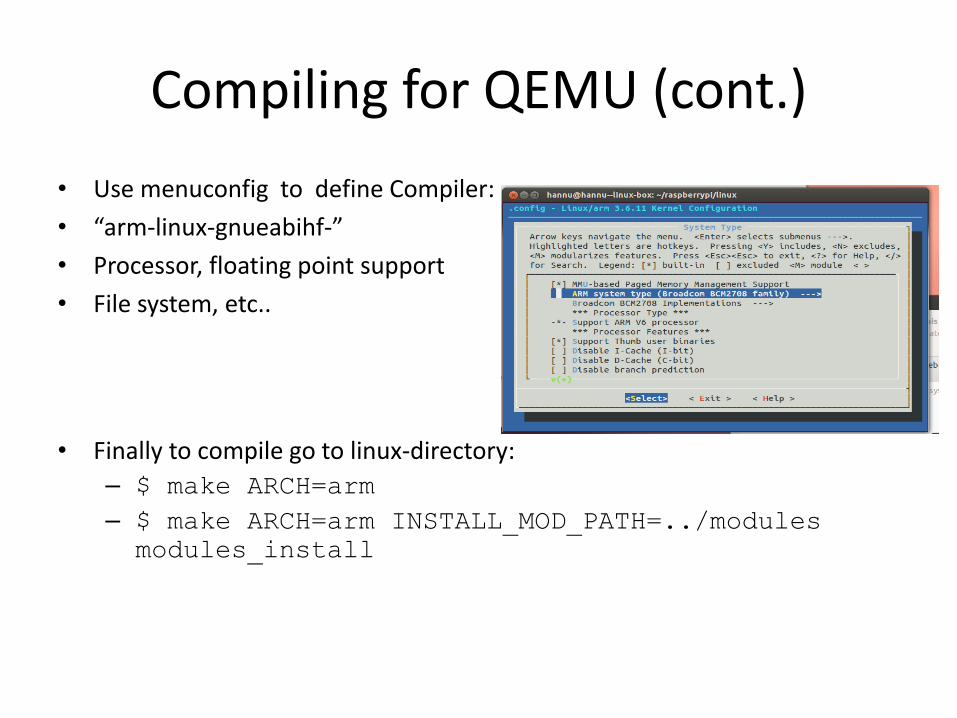
• Use menuconfig to define Compiler:
• “arm-linux-gnueabihf-”
• Processor, floating point support
• File system, etc..
• Finally to compile go to linux-directory:
– $ make ARCH=arm
– $ make ARCH=arm INSTALL_MOD_PATH=../modules
modules_install
Compiling for QEMU (cont.)
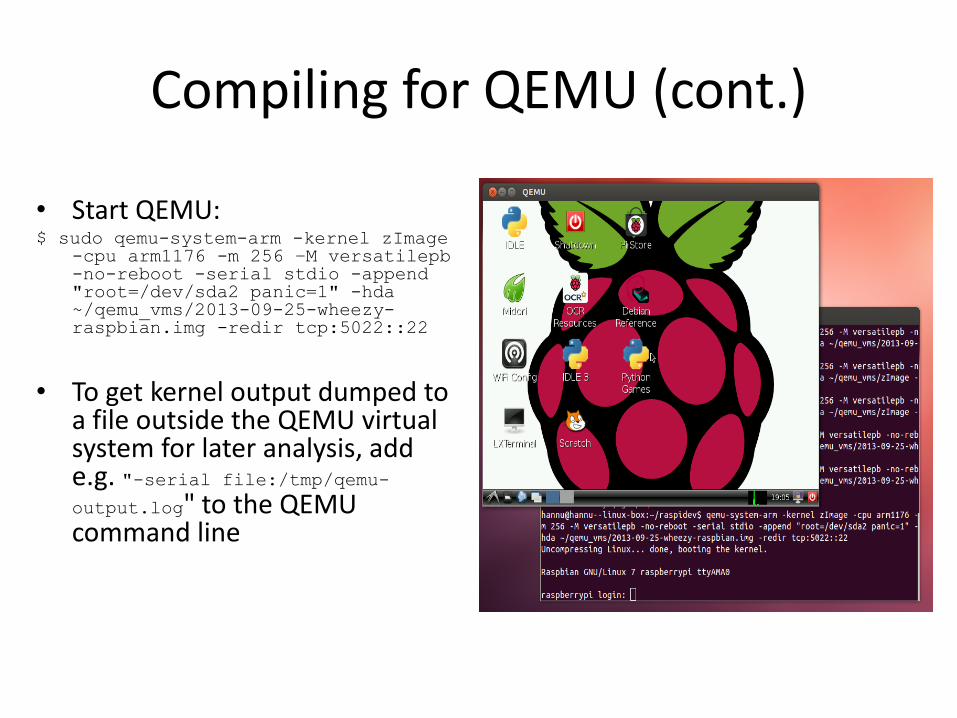
• Start QEMU: $ sudo qemu-system-arm -kernel zImage
-cpu arm1176 -m 256 –M versatilepb -no-reboot -serial stdio -append "root=/dev/sda2 panic=1" -hda ~/qemu_vms/2013-09-25-wheezy-raspbian.img -redir tcp:5022::22
• To get kernel output dumped to
a file outside the QEMU virtual system for later analysis, add e.g. "-serial file:/tmp/qemu-output.log" to the QEMU command line
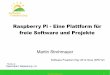
Yocto Project
• The Yocto Project* is an open source collaboration project – Provides templates, tools and methods to help you create custom
Linux-based systems for embedded products regardless of hardware architecture.
• Focused resources for system application developers who need to customize a Linux distribution for a device
• Supports multiple architectures (IA, ARM, PowerPC, MIPS, etc) • Enables transition from Proof of Concept (POC) to supported • Proprietary code can be included in build structure within a
separate • layer, which can be kept private. (security) • Project hosted by the Linux Foundation *) www.yoctoproject.org
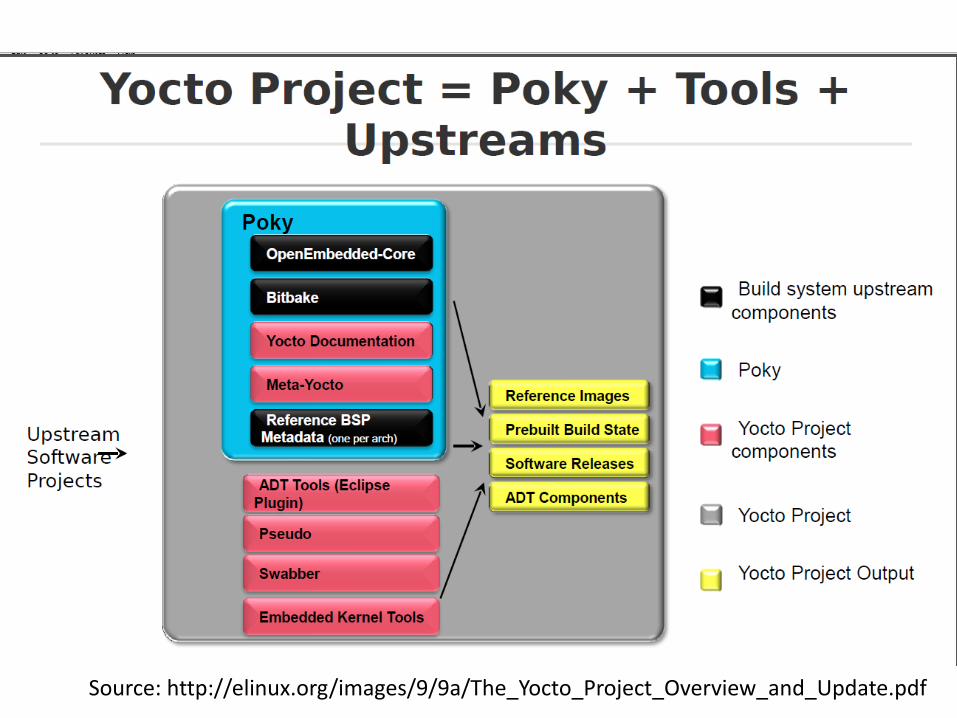
Source: http://elinux.org/images/9/9a/The_Yocto_Project_Overview_and_Update.pdf
Main Yocto elements
• Poky – distribution of Yocto
• OpenEmbedded – framework to create Linux distributions for embedded
devices
• BitBake – Make like package management build tool for embedded
distributions (used by OpenEmbedded)
• Metalayer – information on how to build packages, e.g. raspberry-meta
• QEMU part of the developer tool set
Installing and Configuring for Raspberry
• $ git clone -b dora git://git.yoctoproject.org/poky.git • $ cd poky • $ git clone -b dylan git://git.yoctoproject.org/meta-raspberrypi • Initialize environment variables and the build directory, use: • $ . oe-init-build-env build script • edit conf/local.conf tom match the compilation environment:
BB_NUMBER_THREADS = "2" PARALLEL_MAKE = "-j 2" MACHINE ?= "raspberrypi" GPU_MEM = "16"
• edit poky/build/conf so that the paths match your locale set up
BBLAYERS ?= " \ /home/hannu/yocto/poky/meta \ /home/hannu/yocto/poky/meta-yocto \ /home/hannu/yocto/poky/meta-yocto-bsp \ /home/hannu/yocto/poky/meta-raspberrypi \
• Build the image: bitbake rpi-basic-image • Can be copied (dd) to SD as such
Summary
• To port a new kernel to Raspberry Pi, one needs to get the SoC drivers of the BCM2708/BCM2835
• Get the cross compilation environment
• powerful testing and development tools ensure positive outcome of the porting
• QEMU
• Even better Yocto Project tools