Embed Size (px)
Citation preview

1
MEMS BASED OPTICAL COHERENCE TOMOGRAPHY IMAGING
By
JINGJING SUN
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
2012

2
© 2012 Jingjing Sun

3
To my parents, Xueyi Sun and Xianghui Wang

4
ACKNOWLEDGMENTS
I would like to express my deepest gratitude to my advisor, Dr. Huikai Xie, for his
guidance and support through the course of my study and research. His profound
knowledge and extensive experience in the field of optical MEMS helped me overcome
many obstacles. My research would not be successful without his encouragement and
patience. I would also like to thank my committee members, Dr. Henry Zmuda, Dr. Peter
Zory, and Dr. Malisa Sarntinoranont for their valuable suggestions for my work. I
benefited a lot from Dr. Zmuda’s optics class -- his well structured lectures provided me
a better understanding of the field of optics. I would like to thank Dr. Zory for generously
providing his equipments to our lab, a lot of my experiments were conducted with Dr.
Zory’s equipments. And I would like to thank Dr. Sarntinoranont for her help in the
refractive index measurement project; her useful suggestions really helped improved
the quality of my research. In addition, I would like to thank Dr. Brian Sorg for providing
resources for the animal experiments, Dr. Huabei Jiang for collaborating with our lab on
the photoacoustic research, and Dr. Antonio Pozzi for his collaboration on the PS OCT
study.
I have received a lot of help along the way. I would like to thank Dr. Shuguang
Guo for introducing me to the world of OCT, when I first started working on this project.
He really helped laying a solid foundation for my future research. I would also like to
thank Dr. Lei Wu for providing me with MEMS mirrors to work with, and passing me a lot
of knowledge on MEMS. I thank Dr. Sung Jin Lee for his help in the refractive index
measurement project; Dr. Lee has given me a lot of help and insight on the experiment
and paper writing process. I would also like to thank Lei Xi and Dr. Yiping Zhu, with
whom I worked on the OCT and photoacoustic project. I thank Dr. Se-Woon Choe for

5
helping me with the animal experiments. I would also like to thank Can Duan, who has
helped me a lot with experiments since she joined our group. My thanks also go out to
everyone in BML and IMG for their useful discussions and friendships.
Last but not least, I would like to thank my loving parents and my boyfriend for
their love and support.

6
TABLE OF CONTENTS page
ACKNOWLEDGMENTS .................................................................................................. 4
LIST OF TABLES ............................................................................................................ 9
LIST OF FIGURES ........................................................................................................ 10
ABSTRACT ................................................................................................................... 14
CHAPTER
1 INTRODUCTION .................................................................................................... 16
Traditional Cancer Detection Methods and Their Limitations .................................. 17 Biomedical Optical Imaging .................................................................................... 17
Confocal Laser Scanning Microscopy .............................................................. 18 Nonlinear Optical Microscopy ........................................................................... 19 Optical Coherence Tomography ....................................................................... 20
Limitation in OCT Imaging for Endoscopic Application ........................................... 21 Introduction to MEMS Technology .......................................................................... 21
MEMS Based Endoscopic OCT Imaging ................................................................ 23 Endoscopic Probes Overview ........................................................................... 23 MEMS OCT Endoscopic Probes Overview ...................................................... 24
Electrostatic MEMS Endoscopes ............................................................... 25
Electromagnetic MEMS Endoscopes ......................................................... 28
Piezoelectric MEMS Endoscopes .............................................................. 31 Electrothermal MEMS Endoscopes ........................................................... 32
Research Goals ...................................................................................................... 35 Thesis Outline ......................................................................................................... 36
2 OPTICAL COHERENCE TOMOGRAPHY .............................................................. 37
Low Coherence Interferometry ............................................................................... 37 Time Domain OCT System ..................................................................................... 40 Frequency Domain OCT ......................................................................................... 43
Principle of Frequency Domain OCT ................................................................ 44 Configurations of FD-OCT ................................................................................ 46
SNR Advantage of FD-OCT ............................................................................. 48 Functional OCT ....................................................................................................... 49
Doppler OCT .................................................................................................... 50 Polarization Sensitive OCT ............................................................................... 52
Time Domain OCT System in BML ......................................................................... 57 Summary ................................................................................................................ 61

7
3 ELECTROTHERMALLY ACTUATED MEMS MIRRORS ........................................ 62
Electrothermal Actuation ......................................................................................... 62 1st and 2nd Generations Electrothermal MEMS Mirrors ........................................... 63
LSF-LVD (3rd) and FDSB (4th) Electrothermal MEMS Mirrors ................................. 65 LSF-LVD MEMS Mirror..................................................................................... 65 Light Weight Large Aperture LSF-LVD MEMS Mirror ....................................... 69 FDSB MEMS Mirror .......................................................................................... 70
Summary ................................................................................................................ 73
4 OCT ENDOSCOPIC IMAGING BASED ON MEMS ............................................... 75
MEMS Endoscopic Probe Design ........................................................................... 75 Probe Optical Design ....................................................................................... 76
Probe Mechanical Design ................................................................................. 77 In Vivo Experiments ................................................................................................ 83
Issues with Probe Imaging ...................................................................................... 86
Effect of the Distance between the Fiber and the GRIN Lens .......................... 89 Effect of Mirror Curvature ................................................................................. 91
Effect of FEP Tubing ........................................................................................ 93 Effect of Non-Telecentric Scan ......................................................................... 96
Summary ................................................................................................................ 99
5 MEMS BASED FREE-SPACE TISSUE IMAGING — REFRACTIVE INDEX MEASUREMENT .................................................................................................. 100
RI Measurement Background and Motivation ....................................................... 100 Free Space OCT System ...................................................................................... 102
Sample Preparation .............................................................................................. 103 Method and Process ............................................................................................. 104 Results .................................................................................................................. 108
Discussion and Conclusion ................................................................................... 110
6 MEMS FUNCTIONAL OCT IMAGING (PS, DOPPLER) ....................................... 114
PS OCT System ................................................................................................... 114 PS OCT System Configuration ....................................................................... 114 Ex Vivo PS OCT Imaging Experiment ............................................................ 118
Doppler OCT System ............................................................................................ 120
Doppler OCT Principle.................................................................................... 120 In Vivo Doppler OCT Imaging Experiment...................................................... 121
Summary .............................................................................................................. 122
7 MEMS OCT/PHOTOACOUSTIC IMAGING .......................................................... 123
Photoacoustic Imaging System ............................................................................. 123 Principle and Background............................................................................... 123 MEMS Based Photoacoustic Probe ............................................................... 124

8
Photoacoustic System .................................................................................... 125
Photoacoustic Experiments ............................................................................ 126 MEMS Probe for Both OCT and Photoacoustic Imaging ...................................... 127
MEMS Probe Design ...................................................................................... 127 Ex Vivo Experiment ........................................................................................ 128
Summary .............................................................................................................. 129
8 CONCLUSION ...................................................................................................... 130
Summary of Work ................................................................................................. 130
Future Work .......................................................................................................... 131
APPENDIX: PUBLICATIONS ...................................................................................... 133
LIST OF REFERENCES ............................................................................................. 135
BIOGRAPHICAL SKETCH .......................................................................................... 150

9
LIST OF TABLES
Table page 3-1 Optimized structure parameters of FDSB actuator ............................................. 72

10
LIST OF FIGURES
Figure page 1-1 Confocal imaging system schmatic .................................................................... 18
1-2 A simplified schematic for TPEF and SHG imaging set-up ................................. 19
1-3 OCT system schematic ...................................................................................... 20
1-4 Existing MEMS devices. ..................................................................................... 22
1-5 Commercially available endoscopes [42][43]. .................................................... 24
1-6 MEMS probe schematic.. ................................................................................... 25
1-7 Electrostatic MEMS OCT from UC-Irvine ........................................................... 27
1-8 Electrostatic MEMS OCT from MIT.. .................................................................. 28
1-9 Electromagnetic MEMS OCT reported by Kim et al. [71]. ................................... 30
1-10 Electromagnetic MEMS OCT from Yamagata Research Institute of Technology, Japan. [72]. .................................................................................... 30
1-11 Piezoelectric MEMS OCT reported by Gilchrist et al. [79]. ................................. 32
1-12 Electrothermal MEMS OCT reported by Pan et al. ............................................. 33
1-13 Electrothermal MEMS OCT reported by Xu et al. ............................................... 34
2-1 Michelson interferometry.. .................................................................................. 39
2-2 Gaussian distribution broadband light source interference pattern. .................... 39
2-3 OCT sample signal. ............................................................................................ 40
2-4 RSOD configurations.. ........................................................................................ 42
2-5 Examples of applications of time domain OCT system. ...................................... 43
2-6 Example application of FD-OCT system ............................................................. 44
2-7 FD-OCT signal detection schematic. .................................................................. 46
2-8 FD-OCT configurations.. ..................................................................................... 47
2-9 Doppler OCT sample beam ................................................................................ 50

11
2-10 Consecutive A-Line scans in Doppler OCT ........................................................ 52
2-11 Free space PSOCT system setup. ..................................................................... 54
2-12 OCT system schematic. ..................................................................................... 57
2-13 RSOD configuration ............................................................................................ 58
2-14 Ray trace of RSOD with no center misalignment. ............................................... 58
3-1 Eletrothermal bimorph structure. ........................................................................ 63
3-2 1st generation MEMS mirrors.. ............................................................................ 64
3-3 2nd generation: lateral shift free (LSF) MEMS mirror design. .............................. 65
3-4 LSF-LVD eletrothermal actuator and mirror design ............................................ 66
3-5 Electron micrographs of the 2D MEMS mirror.. .................................................. 67
3-6 MEMS mirror experimental results. .................................................................... 68
3-7 MEMS mirror used for lateral scan.. ................................................................... 69
3-8 FDSB actuator design. ....................................................................................... 71
3-9 FDSB MEMS mirror.. .......................................................................................... 71
3-10 Characterization of the FDSB mirror.. ................................................................. 72
4-1 Typical MEMS probe design. .............................................................................. 76
4-2 Optical components of the probe. ....................................................................... 76
4-3 Mechanical dimensions of the probe .................................................................. 78
4-4 1st generation probe design. ............................................................................... 79
4-5 2nd generation probe design.. ............................................................................. 80
4-6 3rd generation probe design.. .............................................................................. 81
4-7 DFSB probe design.. .......................................................................................... 82
4-8 DFSB probe design.. .......................................................................................... 83
4-9 In vivo OCT images of mouse tongue. ............................................................... 84
4-10 In vivo images of mouse ear.. ............................................................................. 85

12
4-11 In vivo imaging results.. ...................................................................................... 86
4-12 Demonstration of issues focused on in this study. .............................................. 87
4-13 Code V simulation.. ............................................................................................ 88
4-14 Optical quality testing experiments. .................................................................... 89
4-15 Effects of the distance between the fiber and the GRIN lens ............................. 90
4-16 Code V simulation for effect of mirror curvature. ................................................ 91
4-17 Effects of the MEMS mirror radius of curvature based on simulation. ................ 93
4-18 Comparison of simulation and experimental results. .......................................... 93
4-19 Effects of FEP tubing on optical beam from the GRIN lens. ............................... 95
4-20 Effects of FEP tubing on the system. .................................................................. 96
4-21 Demonstration of the non-telecentric scan effect. ............................................... 98
4-22 Correction for curved image display.. ................................................................. 98
4-23 Non-telecentric scan effect in radial direction. .................................................... 99
5-1 OCT setup for refractive index measurement. .................................................. 103
5-2 Anatomical regions of rat brain tissue slices tested. ......................................... 105
5-3 Measurement process.. .................................................................................... 106
5-4 Measurement of optical and physical thickness of various anatomical regions in rat brain tissue slices.. .................................................................................. 107
5-5 OCT images of brain tissue slices under compression. .................................... 108
5-6 Measured RI in various anatomical regions in brain and aCSF. ....................... 109
5-7 RI in rat brain tissue slices under uniform compression. .................................. 110
6-1 Schematic of PS OCT system. ......................................................................... 115
6-2 PS OCT imaging of canine meniscus. .............................................................. 119
6-3 PS OCT imaging results.. ................................................................................. 119
6-4 In vivo Doppler imaging. ................................................................................... 121
7-1 Endoscopic photoacoustic probe. ..................................................................... 125

13
7-2 Photoacoustic system. ...................................................................................... 126
7-3 Ex vivo photoacoustic experiment with pencil lead.. ......................................... 127
7-4 In vivo photoacoustic experiment. .................................................................... 127
7-5 Probe for OCT and PA imaging. ....................................................................... 128
7-6 OCT images of mouse ear................................................................................ 129

14
Abstract of Dissertation Presented to the Graduate School of the University of Florida in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy
MEMS BASED OPTICAL COHERENCE TOMOGRAPHY IMAGING
By
Jingjing Sun
May 2012
Chair: Huikai Xie Major: Electrical and Computer Engineering
Optical coherence tomography (OCT) can provide subsurface cross-sectional
information of tissue samples with high resolutions of 1-15 µm. Microelectromechanical
system (MEMS) mirrors are small and can perform fast optical scans; they are suitable
for realizing lateral optical scans in OCT systems. In this thesis, MEMS technology is
applied to enable endoscopic OCT imaging. Two generations of MEMS mirrors have
been used. The MEMS mirrors are 2 mm x 2 mm and 1.7 mm x 1.55 mm respectively in
size. Four generations of MEMS-OCT endoscopic probes have been developed; the
diameters of the probes are reduced from 5 mm in the first generation down to 2.5 mm
in the fourth generation. The effects of the positions of the optical components and the
protective tubing on OCT imaging performance have been studied through simulation
and verified experimentally. In vivo imaging experiments were done on mouse tongue,
mouse ear and injected tumor; layered structures of mouse tongue and ear, and
accurate shape of tumor regions were clearly detected.
The same MEMS-OCT system has also been used to measure localized refractive
index of acute rat brain tissue slices; regions including cerebral cortex, thalamus, corpus
callosum, hippocampus and putamen were measured; refractive index in the corpus

15
callosum was found to be ~ 4% higher than the RIs in other regions. Changes in
refractive index with tissue deformation were also measured in the cerebral cortex and
corpus callosum under uniform compression (20-80% strain). For 80% strain, measured
RIs increased nonlinearly by up to 70% and 90% in the cerebral cortex and corpus
callosum respectively. Further, two types of functional OCT have been realized:
polarization sensitive (PS) OCT and Doppler OCT. PS OCT has been successfully
applied on canine meniscus, and tissue birefringence were detected and represented by
their Stokes parameters shown by 2D and 3D images. Rat blood vessels were identified
by Doppler OCT. In addition, MEMS based OCT combined with photoacoustic imaging
was demonstrated.
This is the first detailed study on applying MEMS technology to realize endoscopic
OCT imaging. This work opens up many promising opportunities in early cancer
detection and real-time imaging guided surgery.

16
CHAPTER 1 INTRODUCTION
Cancer has been one of the fatal diseases in the United States. Nearly one in four
deaths are caused by cancer in the U.S. American Cancer Society (ACS) predicts that
there will be 1,638,910 cancer cases in the year 2012, and among them, 577,190
cancer patients are not expected to live [1]. Reducing cancer death rate has become a
global research focus. Early detection and improved treatment have proven to be
effective, as cancer survival rate increased from 49% to 67% over the past 30 years [1].
The development of biomedical optical imaging modalities, especially optical
coherence tomography (OCT) has been a major contribution to early cancer detection;
as it can provide in vivo non-invasive 3D ultrahigh resolution images that allows us to
see cancer or precancerous lesions that were not visible to traditional imaging
techniques, including X-ray, computer tomography (CT) scan, ultrasound and magnetic
resonance imaging (MRI) [2].
Endoscopic imaging is very important, because most cancers occur in internal
organs; yet it is difficult, because fast 2D lateral scan needs to be realized in small
endoscopes that must be able to fit into narrow lumens whose diameters typically are
only a few millimeters. Micro-electro-mechanical system (MEMS) technology is an
enabling technology that makes devices and systems on the scale of micrometers [3]-
[5].Development of MEMS mirrors has shown great potential for their application as
endoscopic optical scanners. This chapter discusses the research motivation, and
remaining challenges to the existing solutions, then our solution will be proposed,
followed by an outline of this thesis.

17
Traditional Cancer Detection Methods and Their Limitations
Surgical biopsy has been the conventional cancer detection method, which suffers
from several drawbacks: first, biopsy is an invasive procedure; tissue samples need to
be cut off from questionable areas of diseased organs from human body for pathological
examinations; second, biopsy results may not be reliable, due to the fact that the testing
samples are randomly selected from the target region; third, the diagnostic cycle is long,
which is caused by time-consuming ex vivo experiments to be conducted. Biomedical
imaging techniques are promising alternatives to biopsy; the imaging procedures are
non-invasive and the diagnosis cycles are shorter. Two key factors for early cancer
detections are: first, the imaging modalities should be able to detect precancerous
lesions, whose sizes are normally around 5 to 10 µm; and second, the imaging depth
should be able to cover the epithelial layer, where most early cancerous morphological
changes occur [6], [7]. Conventional bio-imaging techniques that are already widely
used in clinical diagnoses include X-ray, computer tomography (CT) scan, ultrasound
and magnetic resonance imaging (MRI). Among these methods, CT scan and MRI are
the most popular modalities for tumor imaging. However, they are not suitable for early
cancer detection due to their low resolution, which is on the order of 100 µm. Biomedical
optical imaging modalities, which can realize ultrahigh resolution imaging (around 10
µm) are therefore desirable for this task.
Biomedical Optical Imaging
Confocal laser scanning microscopy (CLSM), nonlinear optical microscopy
(NLOM) and optical coherence tomography (OCT) are among the most popular
biomedical imaging techniques; all three of them are capable of providing ultrahigh

18
resolution 2D and 3D cross-sectional tissue images. This section discusses the
principles of these imaging techniques.
Confocal Laser Scanning Microscopy
CLSM has been widely used for tissue imaging and neuron imaging due to its high
resolution compared to traditional microscopy [8]. Clinical applications in evaluating eye
and bone diseases have also been reported [9], [10]. Ultra high depth resolution of less
than 1 µm in CLSM can be achieved by employing pinholes to reject out-of-focus light,
as shown in Figure 1-1. Only optical signal from the focal plane can reach the detector;
therefore, optical sectioning can be achieved. Imaging depth of CLSM can reach up to
100 µm, which is limited by the scattering effect [8]. 3D image can be reconstructed by
combining depth scan and 2D lateral scan [11]. Depth scan is generated by displacing
the pinhole through various axial positions to change the focal planes; while lateral scan
moves the pinhole in lateral directions to cover desired scanning area. 3D images can
be constructed using pixel–by –pixel signal collection.
Figure 1-1. Confocal imaging system schmatic
Photodetector
Pinhole
Aperture Beam Splitter
Pinhole
Aperture
Focal Plane
Sample Light
Source

19
Nonlinear Optical Microscopy
NLOM uses higher order light-matter interaction to generate optical signals. Based
on nonlinear processes that can occur during light-tissue interaction, there are several
types of NLOM. The most researched ones include two photon–excited fluorescence
laser-scanning microscopy (2PLSM) [12], [13], second harmonic generation (SHG) [14]-
[16] and coherent anti-Stokes Raman scattering (CARS) [17], [18]. NLOM is less
sensitive to scattering, so it can be used to generate larger imaging depth up to 1mm.
Compared to linear light-tissue interaction, the chances of nonlinear interaction is
very low, and only when the incident light is focused in both time domain and spatial
domain, can enough fluorescence optical signal be collected for image reconstruction.
High spatial resolution can therefore be achieved without the usage of a pinhole [13].
Objective lens can be used to focus light spatially, while femtosecond pulsed lasers are
required to focus the optical energy in time domain. 3D capability has also been
demonstrated for NLOM.
Figure 1-2. A simplified schematic for TPEF and SHG imaging set-up
Ti: Sapphire
Laser Prechirp Unit
Iris
filter
PMT
Bandpass
Filter
Dichroic Mirror
Objective Lens
Double-clad Photonic
Crystal Fiber
Scan
Mirror
Sample

20
Optical Coherence Tomography
OCT employs an interferometer structure, and relies on coherence gating to reject
signal back scattered from sample outside the coherence length [2]. OCT system uses
a broadband light source at the near infrared range. This wavelength has relatively large
penetration depth for tissues; depending on the tissue type, about 1 to 3 mm imaging
depth could be achieved. Broadband light source can also effectively reduce the
coherence length; therefore, axial resolution can be as high as 1 to 15 µm. Depth scan
of OCT is realized by moving the reference arm back and forth, when combed with 2D
lateral scan on the sample arm, 3D imaging can be generated.
Figure 1-3. OCT system schematic
As discussed above, all three biomedical optical imaging modalities have the
ability to distinguish precancerous lesions from healthy lesions, and to obtain 3D
images. Yet, only OCT has imaging depth large enough to cover the epithelial layer,
therefore, it is most suitable for noninvasive early cancer detection. In addition, OCT
uses relatively lower incident optical power compared to CLSM and nonlinear imaging
systems, which makes it safer for human tissues imaging.
Light source 2×2 Beam
splitter
Reference mirror
Photo detector
Lateral scanning DAQ PC

21
Limitation in OCT Imaging for Endoscopic Application
OCT, since its introduction in the early 1990s, has been employed extensively in
dermatology and ophthalmology [2], [19]-[25]. It has also been used for imaging internal
organs such as the GI tracks, bladders, and esophagus [26]-[30], [33]-[36]. As
mentioned before, endoscopic tissue imaging is very important, yet it is one of the most
challenging part of OCT imaging. Numerous attempts have been made to tackle this
problem. Rotating a fiber micro-prism module at the proximal end [30], and swinging a
distal fiber tip by a galvanometric plate [33] are two earlier ones. These methods are
simple, but relatively slow. In order to increase lateral scanning speed, one method is to
excite a cantilever fiber to its resonance by a piezoelectric tube [35]. The drawback of
this method is the loss of coupling efficiency due to the fiber tip vibration. To solve this
problem, one way proposed is to use a pair of GRIN lens with proper cut angle at the
ends, transverse scanning is achieved by rotating the two lenses at matching speeds
[36]. Yet, further miniaturization is difficult for this design, because two motors are
needed for rotation. In this work, we propose a solution, which integrates MEMS
scanners with OCT to achieve fast lateral scans in small endoscopic probes.
Introduction to MEMS Technology
Micro-electro-mechanical systems (MEMS) technology makes mechanical or
electro-mechanical devices, structures or systems using techniques of microfabrication.
MEMS devices are small and their sizes range from tens of microns to a few
millimeters. MEMS sensors and actuators have been widely used in many products. For
example, MEMS accelerometers can sense changes in velocity, and have been used in
automotives for airbag deployment to improve drivers’ safety. The same accelerometers
can be adapted to sense the tilting of cell phones, tablets, etc. in order to correct the

22
screen display directions. MEMS gyroscopes can sense the change in tilting angles;
many GPS incorporate MEMS gyroscopes and sometimes accelerometers to improve
their performances. One of the most popular applications of MEMS actuators are optical
scanners. There are two types of optical scanners: digital and analog. Digital
micromirrors can be set to two states: on and off. Texas Instrument’s Digital Micromirror
Devices (DMDs) are digital micromirrors, and they are the core of the Digital Light
Processing (DLP) technology [37]. Now about half of the world’s projectors are using
the DLP chips. Analog micromirrors are more flexible, they can steer light continuously
over a certain range. Applications including barcode scanning, virtual retinal display and
projection display have been reported [38]-[40].
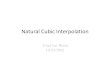
Figure 1-4. Existing MEMS devices. A) Draper tuning fork gyroscope [41], B) TI DMD mirrors[37].
The successful application of MEMS technology in other fields has demonstrated
some great features of MEMS devices, which are desirable for biomedical applications.
First, MEMS is small. MEMS mirrors can be only a few millimeters in diameter, which
makes it ideal for working as a scanning engine in endoscopic biomedical imaging
probes. Second, MEMS is fast. MEMS scan engines can work at hundreds of Hertz or
A B

23
even up to thousands of Hertz during scanning, therefore, real time imaging can be
possible. Third, the cost of MEMS is low. MEMS devices can be mass produced, since
it borrowed fabrication process from the mature semiconductor industry; consequently,
the cost for each device is low. In addition, MEMS has the advantages of low power
consumption and ease of integration. As a result, MEMS mirrors would be the favorable
choice for OCT scan engines.
MEMS Based Endoscopic OCT Imaging
Endoscopic Probes Overview
Endoscopes are tube-like biomedical instruments that are used to look inside
human body or to perform certain surgical procedures. Depending on the body parts
being examined, the types and sizes of endoscopes have different requirements. To
look at body parts that are more easily accessible, for example, one’s ear, nose or
throat, a rigid probe would be more suitable; while to look at organs deeper inside the
body, such as the GI tracks, a flexible probe may be required.
A flexible endoscope normally has three sections: the control section, the
connector section and the insertion tube [43], [44]. The control section is the part held
by the doctor, it normally has angulation controls knobs, valves for suction or air/water,
and the instrument port. Electrical connection of the probe is located at the connection
section; it also has a light guide, an air pipe, a suction port and a safety connecter
mount. The insertion tube is the part that actually goes inside the human body. It
normally has illumination lens, an air/water vent, an instrument channel for suction or
biopsy, and an objective lens for imaging. The diameter of the insertion tube normally
ranges from 2.8 mm to 13.7 mm. OCT endoscopic probes could be designed to be fitted

24
in an insertion tube of the commercially available endoscopes as described, or it could
be inserted into human biopsy channel directly for OCT imaging.
Figure 1-5. Commercially available endoscopes [42][43]. A) rigid probe, B) flexible probe, C) control section of flexible probe, D) connection section of flexible probe, and E) distal end of the insertion tube.
MEMS OCT Endoscopic Probes Overview
The first MEMS based OCT endoscope was introduced by Y. Pan et al. employing
a one-dimensional (1D) electrothermally-actuated MEMS mirror [45]. Two-dimensional
(2D) porcine bladder cross-sectional images were demonstrated. After that, various
forms of MEMS mirrors have been developed as the scanning engine in endoscopic
probes for OCT systems.
Figure 1-6 illustrates the concept of MEMS-based front-view and side-view OCT
probes, in which MEMS mirrors are placed at the distal ends of the probes, and their
angular rotation directs the light and generates lateral scans on the sample. Several
features are highly desirable for this application. Firstly, the footprint of the MEMS
B
C
A
Instrument channel
Objective lens Air/water vent
Light
D E Electrical connection
Light guide
Air pipe Suction port
S-cord connection mount

25
device must be small to fit into small endoscopes; secondly, the mirror aperture must be
large and flat for easy optical alignment and high optical resolution; thirdly, the mirror
must be able to scan large angles to realize large imaging area; fourthly, the driving
voltage must be low to ensure safe use inside human body; and finally, linear control of
the scan should be easily implemented to simplify signal processing and image
interpretation. Single-crystal-silicon (SCS) or silicon-on-insulator (SOI) substrate can
provide large, flat and robust device microstructures; thus they are predominantly used
for making MEMS mirrors for endoscopic applications. There are four actuation
mechanisms employed for generating the scanning motion for MEMS mirrors:
electrostatic, electromagnetic, piezoelectric and eletrothermal actuations. All four
mechanisms have been successfully used for OCT endoscopes, and will be reviewed in
the following sections.
Figure 1-6. MEMS probe schematic. A) front view probe, B) side view probe.
Electrostatic MEMS Endoscopes
Electrostatic actuation has been one of the most popular choices for MEMS
mirrors. Electrostatic actuation is based on electrostatic force which exists between
electrically charged particles. The first MEMS mirror based on this principle was
demonstrated by Petersen in 1980 [46]. By employing a parallel-plate structure, the
maximum rational angle of the micromirror reached ±2º at resonance and 300V driving
A B

26
voltage. This parallel-plate structure has been adopted by many other researchers and
rotation angles as large as ±8º have been achieved with lower driving voltages in the
range of 40V to 200V, but the reported mirror aperture diameters are normally smaller
than 500µm [47]-[54]. What limits this structure from realizing larger scan angle is the
pull-in effect. To overcome this problem, vertical comb drive actuation structures were
employed [55]-[60]. The vertical or angular displacement of the comb drives is
converted into mirror tilting through a torsional beam which supports the mirror plate.
Mirror aperture size as large as 1.5 mm × 1.5 mm has been reported based on this
structure [56]. Both 1D and 2D micromirrors have been realized using this structure, and
the mechanical deflection angle has reached ±5.5º at only 16 V resonance [56] and
±6.2º at 55 V resonance [57]. For 2D mirrors, two gimbals are used to support the mirror
plate in orthogonal directions. To further increase scan angles, Milanovic et al. proposed
a new gimbal-less SOI-based micromirror [58], the static optical deflection for both axes
have increased to ~ ±10° with ~150 V driving voltage.
A series of endoscopic OCT probes employing electrostatic micromirrors have
been reported by Jung and McCormick [61], [62]. Figure 1-7 A shows the SEMs of two
of the MEMS mirrors they reported. The one on the left has a 1 mm × 1 mm mirror
aperture size on a 2.8 mm × 3.3 mm footprint, while the one on the right has a mirror
aperture diameter of 800 µm. The devices employed 2D gimbal-less vertical comb
structures. The mirror plate and actuators were fabricated separately and then bonded
together. Optical scanning angles of the mirrors can reach 20° at resonance when a 100
V driving voltage is applied. Resonant frequencies as high as 2.4 kHz and 1.9 kHz on
two axes have been reported. Electrical connection was done through wire bonding,

27
and injection mold was used for probe body. The diameters of the endoscopic probes
range from 3.9 mm to 5.0 mm. 3D in vivo OCT images of healthy rabbit rectal tissues
have been obtained at 8 frames/sec. The image volume size is 1 × 1 ×1.4 mm3, and the
resolution of the image is 20 × 20 × 10 µm3. Important tissue structures can be clearly
seen here.
Figure 1-7. Electrostatic MEMS OCT from UC-Irvine. A) SEMs of two MEMS mirrors, B) Electrical connection through wire-bonding, C-E) packaged MEMS probe, F) 3D image of rabbit rectal tissue.
Aguirre et al. from MIT have also reported an electrostatic MEMS mirror based
endoscopic OCT probe [63]. In their paper, they demonstrated a gimbaled 2D MEMS
mirror design based on angular vertical comb actuators, which allows larger scan
angles compared to other vertical comb drives with the same dimensions. The mirror
has a circular aperture, whose diameter is 1 mm and the device footprint is 3 × 3 mm2,
as shown in Figure 1-8 A. Mechanical scan angles of ±6°have been achieved on both
axes at more than 100 V. They reported a side-view probe with an aluminum holder
housing the MEMS mirror. The probe has a diameter of about 5 mm. The optical
A B
C D
E F

28
components packaged inside the probe include a fiber, a GRIN lens and a small
achromatic lens (Figure 1-8 B). Incorporated in a spectral domain OCT, the probe scans
at 4 frames/sec over the range of 1.8 mm × 1.0 mm × 1.3 mm. 3D hamster cheek pouch
images have been obtained to demonstrate the capability of the probe.
Figure 1-8. Electrostatic MEMS OCT from MIT. A) SEMs of the MEMS mirror, B) design and packaging of the probe, and C) 3D image of hamster cheek pouch.
As is shown in Figure 1-7 B, the probe size is limited by the footprint of the MEMS
mirror. For electrostatic mirrors, much space of the device is taken by the comb drive
actuators. This results in a small ratio of the mirror aperture size to the device footprint
size, or small fill-factor for electrostatic mirrors, which may limit further miniaturization of
endoscopic probes. High resonant frequencies make them ideal for fast scanning
applications, but working at resonance can cause non-linear scan. High driving voltage
required may also be a concern for endoscopic applications.
Electromagnetic MEMS Endoscopes
To further increase the scanning range and lower the driving voltage,
electromagnetic mirrors are explored for endoscopic OCT applications. Electromagnetic
actuation is based on Lorentz force; larger driving force can be realized with lower
driving voltage. By controlling the current flowing direction, both repulsive and attractive
driving force can be realized [64]. The magnetic field for electromagnetic actuation is
normally generated by permalloy [64]-[66] or active electric coils [64], [67]-[68]. A 1D
A B C
1mm
Inner torsion beam
AVC actuators
Outer torsion beam Gimbal
Y X
Control SMF FC lens Mirror
AL package
5 mm

29
micromirror with over 60° deflection angles has been reported by Miller et al. [64]. A 2D
micromirror with a mirror plate as large as 3.5 mm × 3.5 mm has been demonstrated.
Working at its resonance at 2 kHz, with 20 mA driving current, the mirror scan angle
could reach ±1.51°, and the movable frame can scan ±5.71° [69]. Yang et al. proposed
a coil-less design, in which the optical scan angle can reach 20° with a 2 mm × 2 mm
mirror plate when the mirror was operated at an input power of 9 mW [70].
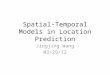
Kim et al. demonstrated a 2D electromagnetic MEMS mirror based endoscopic
OCT probe [71]. A gimbaled 2D mirror design was employed. A permanent magnet was
glued to the backside of the mirror plate, and wire-wound coils were placed inside the
probe body for each scan direction. The mirror plate was 0.6 mm × 0.8 mm and the
device footprint was 2.4 mm × 2.9 mm, as shown in Figure 1-9. About ±30° optical scan
angle was obtained with ±1.2 V and ±4 V driving voltages for the inner and outer axis,
corresponding to 50 mA and 100 mA current respectively. A probe with a 2.8 mm
diameter and 12 mm length has been demonstrated with SD-OCT. 3D images of finger
tips were obtained at 18.5 frames/sec. ±2.8 V and ±0.8 V voltages were applied on the
inner and outer axis, covering 1.5 mm × 1 mm lateral scan range, and consuming 150
mW power in total.
Watanabe et al. have recently demonstrated another electromagnetic MEMS OCT
probe [72]. The fabricated mirror module is shown in Figure 1-10. The mirror plate size
is 1.8 × 1.8 mm2, and the device chip is as large as 10 × 10 × 0.2 mm3 due to the large
electrical coil required. The entire device was placed on a 15 mm × 15 mm × 1 mm
PCB, which was fixed on the holder with a magnet inside. The MEMS mirror was used
in a Fourier domain OCT and 3D human finger images were obtained.

30
Figure 1-9. Electromagnetic MEMS OCT reported by Kim et al. [71]. A) SEMs of the MEMS mirror, B) design and packaging of the probe, and C) 3D image of fingertip.
Figure 1-10. Electromagnetic MEMS OCT from Yamagata Research Institute of Technology, Japan. [72] A) MEMS mirror module, B) MEMS probe in OCT system, and C) 3D image of human fingertip.
A C
B
A B
C
F E
D
Inner axis
Outer axis
Slow coil
Fast coil pair
MEMS
Fiber
Grin Grin lens Optical fiber Fold mirror
MEMS scanner
MEMS scanner
6 (typ.)
Torsion beams
Printed board (t 1 mm)
Y scan coils Au mirror
Flex lead
10
Magnet and holder X scan coils
X
Y 15
Epidermis
Dermis

31
One of the drawbacks of electromagnetic mirrors for endoscopic application is its
high power consumption. The other drawbacks lie in the fact that external magnets are
required for actuation, which not only greatly complicates the packaging process, but
also constraints the further miniaturization of the probes. Electromagnetic interference is
also a concern.
Piezoelectric MEMS Endoscopes
Piezoelectric actuation has also attracted some attention. It takes advantage of the
piezoelectric effect, and realizes bending motion by applying electric field across a
piezoelectric material such as lead zirconate titanate (PZT). The advantages of
piezoelectric actuation include fast response, large bandwidth and low power
consumption. Piezoelectric actuators are usually composed of metal/PZT/metal
sandwich [73]-[76] or double layered PZT materials [77]. Scanning angles as large as
40° have been reported, using voltages up to 13V [78].
A piezoelectric MEMS based OCT probe has also been reported [79].
Piezoelectric MEMS mirrors with aperture sizes of 600 µm × 840 µm and 840 µm ×
1600 µm have been fabricated. Mechanical scan angles up to ±7° and resonant
frequency up to 1 kHz were measured for the mirrors. A prove-of-concept probe design
is shown in Figure 1-11 B. The 600 µm × 840 µm mirror was used in a FD-OCT system
to demonstrate its imaging capability, and a 2D image (Figure 1-11 C) of an IR card was
obtained.
However, the mirrors are only one dimensional and two mirrors scanning at
orthogonal directions are required for 3D imaging. In addition, the large initial tilt angle
will complicate optical alignment and probe packaging. Furthermore, for piezoelectric

32
MEMS mirrors to be used for in vivo OCT imaging applications, one also needs to
overcome the charge leakage problems and hysteresis effect.
Figure 1-11. Piezoelectric MEMS OCT reported by Gilchrist et al. [79] A) SEM of MEMS mirror, B) 3D MEMS probe design, and C) 2D image of IR card.
Electrothermal MEMS Endoscopes
Eletrothermal actuation is studied to further increase the scanning range at low
driving voltage. Electrothermal actuation can be realized by using bimorph beams. A
bimorph beam is formed by two layers of materials with different thermal expansion
coefficients. The bending motion of the beam is induced by the expansion difference of
the two materials in response to temperature change. The actuation force typically is
larger than that of electrostatic or electromagnetic actuation. Electrothermal
micromirrors also have almost linear response between the scan angle and applied
voltage, and other advantages, such as simple structure design, and easy fabrication.
One of the most important features of electrothermal mirrors is their high fill factor. For
the same mirror aperture size, the device can be smaller, which is crucial for making
smaller endoscopic probes. Different materials have been explored for fabricating
bimorph beams [80]-[87], including silicon (Si), various metals, such as aluminum (Al),
polymers, and dielectrics. The most popular choice is Al and SiO2. It was first
demonstrated by Bühler et al. in 1995 [81]. Then Jain et al. demonstrated 2D
B C A

33
micromirrors based on Al/SiO2 bimorph beams and polysilicon as the heating material
with rotation angle up to 40°on a 1 × 1 mm2 mirror plate at 15 V [88].
Electrothermal actuation was the first of the four actuation mechanisms to be used
in endoscopic OCT imaging [45], [89]. Xie et al. reported a 1D SCS MEMS mirror. The
mirror aperture size was 1 mm × 1 mm, and 17° rotation angle and 165 Hz resonance
frequency were measured. A forward-looking probe was demonstrated and applied for
in vivo imaging of porcine urinary bladders. 5 frames/sec imaging speed was achieved
with 2.9 mm × 2.8 mm imaging area. Yet, due to the mesh actuator design, a 10° scan
discontinuity was observed. Later in 2003, the actuator design was improved by
replacing it with a paralleled actuator beam structure, resulting in continuous angular
scanning with the scan angle increased to 37° [90]. 2D ex vivo imaging of a rabbit
bladder, as shown in Figure 1-12 E, was obtained to demonstrate the probe capability.
Figure 1-12. Electrothermal MEMS OCT reported by Pan et al. A) SEM of 1D MEMS mirror, B) Meshed actuator structure, C) parallel beam structure, D)OCT system with forward looking endoscopic probe design, and E) 2D OCT image of rabbit bladder.
A
B
D
C E

34
Figure 1-13. Electrothermal MEMS OCT reported by Xu et al. A) two-axis electrothermal MEMS mirror, B) probe design and assembly demonstration, and C) 2D and 3D OCT image of an IR card.
More recently, Xu et al. also reported an electrothermal actuation based MEMS
OCT probe [91]-[94]. They have demonstrated a series of MEMS mirrors with both
straight and curled shaped electrothermal bimorph actuators formed by Aluminum and
Silicon. The largest mechanical deflection reported was 17° at an operation voltage of
~1.3V [91]. The device has a 500 µm diameter mirror aperture on top of a 1.5 mm × 1.5
mm chip. The mirror showed good linearity between driving voltage and scan angle
after the initial critical voltage, and the 3 dB cutoff frequency was 46 Hz. The probe
assembly was based on silicon optical bench (SiOB) methodology for self-alignment of
the optical components, and the electrical connection from the MEMS mirror to the
copper wires on the substrate was made using solder balls. The probe was then
inserted into a transparent housing. The diameter of the probe was less than 4 mm, and
the rigid length was about 25 mm. The probe was used in a swept source OCT system
at a frame rate of 21.5 frames/sec for 3D imaging; and the imaging results of an IR card
were shown in Figure 1-13C.
An improved design based on Xu's report was later reported by Mu et al. [95]. The
mirror scanning angle was 11° at less than 2 V driving voltage, and the mirror plate was
increased to 1 mm in diameter. The probe diameter shrank to 3mm, and a similar SiOB
A B C

35
assembly process was adopted. 2D images of mouse muscle and skin were
successfully demonstrated.
Of the four actuation mechanisms, electrostatic actuation has fast response and
lowest power consumption, but it requires large driving voltage, which may not be safe
for imaging human internal organs. Electromagnetic actuation can realize large scan
angle, at low driving voltage, but the permanent magnet required poses difficulties for
further probe miniaturization. Piezoelectric MEMS mirrors can also be fast and consume
low power, but it must overcome the large initial tilting issues, the hysteresis effect and
charge leakage problem for OCT imaging applications. Electrothermal actuation can
scan large angles at low driving voltages, and it also has the largest fill-factor compared
to all three other types of MEMS mirrors. Thermal response is relatively slow, but it is
capable to achieve real time imaging. Overall, electrothermal MEMS mirrors are the
better choice for endoscopic OCT scanners.
Research Goals
This research explores the applications of OCT technique using MEMS scanners.
One major task is to develop endoscopic OCT probes based on electrothermal MEMS
mirrors for tissue imaging, and prove its ability for early cancer detection. The other one
is to employ OCT for localized brain tissue refractive index (RI) measurement. This
study could help to correct optical image distortion caused by heterogeneous tissue
structures or distorted tissue image caused by disease or surgical loads. Another
research goal is to realize functional OCT, including polarization sensitive OCT and
Doppler OCT to improve image contrast for birefrigent tissues and blood vessels. Lastly,
to develop MEMS based endoscopic probes that are suitable for both OCT imaging and
photoacoustic imaging; photoacoustic imaging can achieve higher imaging depth at a

36
cost of lower resolution, by combining the advantages of the two imaging modalities,
one imaging session would yield more information for diagnosis.
Thesis Outline
There are seven chapters in this thesis. Chapter 1 introduces the current imaging
techniques and their limitations in the application of early cancer detection; a solution
based on MEMS technology, specifically eletrothermal MEMS mirrors as the scanning
engine has been proposed. Background and literature reviews are also given in this
chapter. Chapter 2 focuses on introducing OCT principles, including both time domain
and frequency domain systems. Functional OCT: Doppler OCT and polarization
sensitive OCT will also be introduced. Chapter 3 first introduces electrothermal
actuation mechanism, and then goes on to introduce four generations of MEMS mirrors
developed at BML, including two generations employed in this work. Chapter 4 presents
endoscopic MEMS OCT imaging. Four generations of probe designs and their assembly
processes will be introduced; imaging results obtained with assembled probes will be
presented to demonstrate the probe capabilities. And the optical qualities of the probes
will be analyzed. Chapter 5 discusses OCT's application in measuring localized
refractive index in brain tissue slices using MEMS mirror for lateral scans. RIs measured
in five different regions and how RIs change in grey matter and white matter under
compression will be reported. Chapter 6 covers functional OCT. PS OCT and Doppler
OCT results will be presented in this chapter. Chapter 7 discusses combining OCT with
photoacoustic imaging. Preliminary results will be presented. And lastly, in Chapter 8, a
summary will be given, and future work will be listed.

37
CHAPTER 2 OPTICAL COHERENCE TOMOGRAPHY
OCT was first introduced in the early 90s at MIT [2]. Due to its high resolution, and
relatively large penetration depth, OCT has become the ideal imaging modality for non-
invasive early cancer detection. Over the years, OCT has evolved from time domain to
frequency domain, resulting in much faster systems; Functional OCT has also been
developed. Doppler OCT helps to image the cardiovascular system with better contrast;
while PS OCT targets regions with birefringent properties. In this chapter, the principle
of low coherence interferometry will be introduced first. Then time domain and
frequency domain OCT implementations and their difference will be discussed. For time
domain OCT, different depth scanning mechanisms will be reviewed. Finally, functional
OCT principles will be presented.
Low Coherence Interferometry
The core of OCT system is a low coherence interferometer. The most popular
configuration of OCT system is a Michelson interferometer, which is shown in Figure 2-1
A. Michelson interferometer is a kind of division-of-amplitude interferometer. The input
light is divided into two arms at the same point in space by a beam splitter and travels
through different paths from that point on. Reflective mirrors are placed at each end of
the arms, and input signals are reflected by the mirrors at the ends and travels back to
recombine at the beam splitter. When two beams of light have the same frequency,
same vibration direction, and a certain phase difference, interference pattern can be
observed at the photodetector. Simple math can help prove this statement. The electric
fields of two beams of input light can be expressed as
)cos( 111111 trkAE
(2-1)

38
)cos( 222222 trkAE
(2-2)
In the equations, A
is the field amplitude vector;
2k is wave number; is the
frequency; and represent the initial phase of the electrical field. When the two beams
combine at one spatial point, the intensity of the combined signal can be expressed as
cos22
2)()(
21212121
12212122112121
AAIIEEII
IIIEEEEEEEEEEI
(2-3)
)()()( 21212211 trkrk is the phase difference of the two signals. 1I
and 2I are the individual intensities of the two input signals, and 12I is the interference
term. One prerequisite for the interference term to exist is that the two beams have
parallel amplitude portion, or else the two amplitude vectors are perpendicular to each
other, which will result in 0cos2121 AAAA
. The other requirements for obtaining
a stable interference pattern are: first, the phase difference should not change with time,
meaning 21 ; and second, the initial phase difference 21 should be fixed. Since
the two beams from Michelson interferometer are from the same light source, these
requirements can be satisfied; as a result, stable interference pattern can be observed
at the photodetector.
When the input light source is of single wavelength , we could obtain
221 kk , then the question could be simplified if we consider using a 50/50 beam
splitter, the two beams will have the same amplitude 21 AA , and the same
intensity 021 III . As a result, the interference signal can be expressed as

39
)4
cos1(2 0 rII
. r is the optical path difference between the two arms, and the
term 4 is obtained here, because the light goes through the optical paths two times.
Figure 2-1. Michelson interferometry. A) Michelson Interferometer setup, B) Interference
pattern of wavelength .
The interference pattern of monochrome light source is shown in Figure 2-1B. It is
a cosine wave with a period of 2
. Theoretically, the interference length is unlimited. But
in reality, all light sources have their own bandwidths, expressed as . Different
wavelengths will have different interference periods, and each interference pattern will
add up to result in a final interference pattern with a limited interference length, as
shown in Figure 2-2.
Figure 2-2. Gaussian distribution broadband light source interference pattern.
For a light source with a Gaussian spectrum, the intensity of the interference
pattern also has Gaussian distribution. In this case, the coherence length can be
expressed in the following form:
22
44.02ln2
cl . Only when the optical path
B A Photodetector
Beam splitter
0
x
I

40
lengths of the two arms are matched to within the coherence length, can interference
pattern be generated. It is clear from the equation that the coherence length is inversely
proportional to the bandwidth of the light source. By employing broadband light source,
the coherence length can be effective reduced. And this is the principle based on which,
ultrahigh axial resolution of OCT system could be realized.
Time Domain OCT System
In a time domain OCT system, depending on the functions of the arms, one of
them is chosen to be the reference arm, while the other one is the sample arm. A
movable reflective mirror, whose position can be controlled precisely, is placed at the
end of the reference arm; while a sample of interest is placed at the end of the sample
arm. The biological samples can be deemed as a series of tissue layers, the
backscattered light from each layer contains information of that specific depth. The
reference mirror scans through each depth, and only the signals from the depths that
match with the reference arm optical path length to within the coherence length will be
collected, while the other signals are rejected by coherence gating.
Figure 2-3. OCT sample signal.
Beam splitter
Photodetector
Reference arm
Sample

41
Superluminescent Diodes (SLDs) are usually employed by time domain OCT,
because they can offer high brightness, and low coherence length [96]. Commercially
available SLDs at the near infrared range has bandwidth from 45 nm to 110 nm, with
emitting power over 10 mW, resulting in axial resolution as small as 7 µm in air [97].
Efforts have also been made to combine multiple SLDs to form a light source with
broader bandwidth [98]. One SLD light source combining two SLDs has already been
commercialized by Thorlab, the bandwidth reached 200 nm, with center wavelength of
1300 nm, axial resolution as high as about 3.7 µm in air can be obtained [99].
Depth scanning, also called A-Scan, is performed by moving the reference mirror
back and forth over a desired imaging range. In early OCT systems, a linearly
translating galvanometer is used for depth scan [2]. This method is simple and
straightforward, but its low speed prevented it from being used in real time imaging
applications. To increase the scanning speed, Tearney et al. proposed a fiber stretching
based optical delay line, which is realized by employing piezoelectric actuation [100].
Although high scanning speed is obtained, this method has some disadvantages. First,
it requires high driving voltage; second, non-linear translation occurs due to hysteresis
effect; third, there is polarization mode dispersion, which will decrease the image
resolution. In these two methods, the movement of the reference mirrors will induce a
carrier frequency for the interference signal. This is desirable for a better signal to noise
ratio, since the transmission of the signal can avoid the base band where flicker noise
dominants. Later, a grating based rapid scanning optical delay line (RSOD) is
introduced [101]-[108]. This method is based on the technique of femtosecond Fourier
transform pulse shaping. The input light is optically Fourier transformed and modulated

42
in frequency domain. Early attempt for pulse shaping employed a symmetric
configuration; phase modulation is realized by a liquid-crystal phase modulator, shown
in Figure 2-4 A [103]. Later, by employing a double pass mirror, a more compact RSOD
design is introduced [106], [107], shown in Figure 2-4 B [107]. Linear phase modulation
is realized by rotating a scanning mirror at very fast speed. Scanning rate of 6 m/s and a
repetition rate of 2 kHz were realized. This method can be used to control group delay
and phase delay separately, and also is able to achieve high scanning speed, high
repetition linear scanning. This method could be used for systems that requires no
dispersion. On the other hand, by changing the position of the grating, certain
dispersion could be introduced into the system, which could be used to cancel out the
dispersion in sample arm.
Figure 2-4. RSOD configurations. A) symmetric pulse shaping configuration, B) folded RSOD design employing double pass mirror [106].
A
B

43
Figure 2-5. Examples of applications of time domain OCT system. A) OCT imaging of rabbit esophagus in vivo. (m: mucosa, sm: submucosa, im: the inner muscular layer, om: the outer muscular layer, s: serosa, a: adipose and vascular supportive tissues [104], B) OCT imaging of rabbit bladder. (U: urothelium, LP: lamina propria, M: muscularis, F: attached fatty tissue)[106].
Frequency Domain OCT
To further increase depth scanning speed, Fourier domain OCT (FD-OCT) system
was introduced [109]. In FD-OCT, no mechanical depth scan is required, instead, the
spectrum of the interference signal is obtained, and the depth information can be
calculated via inverse Fourier transform. FD-OCT can be implemented in two ways.
One way is to use a diffraction grating to generate the spectrum of the interference
signal spatially, and the signal is detected by a spectrometer. Using this implementation,
the depth scan is finished during the time for one exposure of spectrum. The other
method uses an ultra-fast sweeping light source to temporally disperse the signal; one
photo detector is needed to capture the signal. Depth scan of this implementation is
done during one wavelength sweeping period. Swept laser sources that have scanning
frequency of up to 20 KHz over a tuning range of 120 nm full width has been reported
[110]. Applied in OCT system, one depth scan can be done in 250 µs, greatly increased
the imaging speed. FD-OCT has been reported to have good signal to noise ratios;
sensitivity of around 90 dB have been achieved [111], [112]. Many research groups
A B

44
have successfully demonstrated FD-OCT, images of human retina, fingertip, etc. have
been obtained [112]-[114].
Figure 2-6. Example application of FD-OCT system: tomographic scan of the entire left circumflex coronary artery obtained with frequency domain OCT system (C7xR, LightLab, Watford, USA). A) longitudinal view of 54 mm of the artery at the pullback rate of 20 mm/s, B-E) multiple cross sectional images selectively obtained at different levels of the native left circumflex artery [116].
Principle of Frequency Domain OCT
FD-OCT is based on spectral interferometry technique [117]-[119]. It employs the
same system configuration as TD-OCT; the difference is that the reference arm is fixed
in this case, with an optical path length difference with the sample arm.
Consider the sample arm only, when incident with a plane monochromatic wave,
whose electric field can be expressed as )exp( tirkiAE iii
, based on the Fourier
diffraction theorem, in far field, the electric field of the detected back-scattered light can
be related to the Fourier transform of the scattering potential of the object )(rF
:
Aa
B C D E

45
)(~
)exp(.
)()exp(.)exp()()exp(.)( 3
KFtirkiC
rFFTtirkiCrdrKirFtirkiCkE
s
ssss
(2-4)
In this equation, .C is a constant, sk
is the wave vectors of the scattered light,
is kkK
is the scattering factor. When assuming the scattering potential F
is constant
over x and y direction, the equation can be simplified in the z direction, a new constant
.1C could be used to include the integral over x and y directions, while D is the
distance from the sample surface to the photodetector
)()exp(.1)exp()( zFFTtiDikCtiDikkAkE ssssss (2-5)
)(zFFTkA ss (2-6)
As is shown here, the scattering potential can be obtained by inverse Fourier
transform of amplitude of the electrical field. Yet, the amplitude of the signal cannot be
directly detected; instead, the power of the back scattered light can be measured
through photodetector. The inverse Fourier transform of the interference power results
in the autocorrelation of the scattering potential.
)(][)]([ 211 zFACFkAFTkIFT sssS
(2-7)
In an OCT system, when the reference mirror is placed in front of the sample with
a distance L , and the sample thickness is T, shown in Figure 2-7. The strong reflection
at the reference mirror can be expressed as rzzR , where R stands for the
reflectivity of the reference mirror. The scattering potential from an OCT system, is
rS zzRzFzF )()( (2-8)

46
The inverse Fourier transform of the power of interference signal yields the auto-
correlation of )(zF , the system scattering potential.
)()()()()( * zRzzRFzzRFzACFzACF rSrSFsF (2-9)
Figure 2-7. FD-OCT signal detection schematic.
)(zACFF is consist of four terms, the third term of the above equation is the true
reconstruction of the object structure, centered at rzz . In order for the
)( zzF rS term to not overlap with the other terms, the distance of from the reference
mirror to the sample surface L should be greater than the sample thickness T. As a
result, depth information of the sample can be obtained through inverse Fourier
transform of the power signal.
Configurations of FD-OCT
In order to perform Fourier transform, the relationship between signal intensity I
and wave number k should be obtained. As was mentioned in the beginning of section:
Principle of Frequency Domain OCT, two frequency domain OCT configurations have
been proposed for this purpose.
0
T L
Reference
Mirror
Z=Zr Beam Splitter
Photodetector
Light Source
Sample

47
One FD OCT configuration is shown in Figure 2-8 A. In this configuration, a
broadband light source is employed as in the time domain setup. After the reference
and sample signals recombine at the beam splitter, the signal is incident on a dispersive
grating. The signals of different frequencies are then spatially separated, and the signal
detection is realized by using a spectrometer.
Figure 2-8. FD-OCT configurations. A) spectral domain OCT, B). SS-OCT.
The other configuration is shown in Figure 2-8 B. This setup employs a frequency
sweeping light source, which sweeps the signal frequency over a broad band.
Therefore, this configuration is usually referred to as swept source OCT (SS-OCT). Only
one photodetector is needed for this configuration. The wavelength of input light change
linearly with time and the interference signal is collected during one sweeping period.
Broadband source Beam splitter
Reference mirror
CCD array detector
Lateral scanning
PC DAQ
Dispersive
Grating
A
Sweeping source Beam splitter
Reference mirror
Photo detector
Lateral scanning DAQ PC
B

48
SNR Advantage of FD-OCT
Without having to mechanically scan the reference arm, the speed advantage of
FD-OCT is obvious; the other advantage of FD-OCT over TD-OCT is better signal to
noise ratio (SNR) [120], [121]. In time domain system, the interference part of the signal
has electrical power defined as ][/2 2222 AEPPeS samplerefsignal , in which is the
quantum efficiency, e is the electron charge, and /hcE is the photon energy. This
reference and sample arm signal power can be expressed by their power spectral
density.
dSP samplerefsampleref )(,, (2-10)
An assumption can be made here: the reference spectral density )(refS is the
same as the light source spectral density )(S ; while the sample spectral
density )(sampleS is an attenuation of )(S , which can be noted as )(S . As a result,
the signal power can be written as
2222 /])([2 EdSeSsignal
(2-11)
There are three main noise sources in the OCT system, they are thermal noise,
shot noise and relative intensity noise. The noise spectrum is expressed in the following
equation.
]/[)(224
)( 22
2
HzAE
eP
E
Pe
R
kTfN coh
refref
fb
noise
(2-12)
In this equation, k is Boltzmann’s constant, T is the temperature in degrees
Kelvin, fbR is the value of the transimpedance amplifier feedback resistor, and coh is the

49
coherence time of the source, which is
cccoh
22
44.02ln2
. Under shot noise
limited condition, the second term of the noise is dominant, and the SNR in time domain
can be expressed as in equation (2-13) , in which and 0 are the source spectral
bandwidth and center frequency. BW is the signal passband, which is normally two
times the carrier frequency spectrum.
dSBWE
dSSNR
)(
])([
2/
2/
22/
2/
1 (2-13)
When this signal is spatially separated onto two detectors, each detector obtains
half the original bandwidth, the signal power is the coherent summation of the signal
over the spectrometer, while the noise power is the incoherent summation of the two.
The new SNR is
12/
0
0
2/
22/
0
0
2/
2 2])(5.0)(5.0[
])()([SNR
dSBWdSBWE
dSdSSNR
v
(2-14)
As we can see here, SNR increased by a factor of 2. The above analysis can be
extended to N detectors, which is the case for FD-OCT. The exact value of SNR
increased depends on the source's spectral density and spectral bandwidth per
detector.
Functional OCT
Another branch of OCT system is functional OCT. We focus on two types of
functional OCTs: Doppler OCT and polarization sensitive OCT (PS OCT). They extend
OCT's ability from obtaining micro-scale intensity images of subsurface structures to
imaging velocity or birefringence.

50
Doppler OCT
Doppler effect describes the phenomenon that when there is relative movement
between the source and the observer, the frequency received by the observer is
different from the source frequency, and the change in frequency is related to the
velocities of the source and the observer. In standard OCT imaging, the signal collected
by the photodetector is modulated by a carrier frequency. According to Doppler effect, if
the imaged sample has a relative velocity to the incident light, the detected carrier
frequency would change, and by detecting the changed carrier frequency, velocity of the
sample could be obtained. This is the principle of Doppler OCT. Doppler OCT is
normally used to identify blood vessels. As is shown in Figure 2-9, when the target
blood vessel is place at ( 90 ) to the incident beam with blood flow velocity of sV , a
relative velocity of cossV could be generated, and blood vessels could be detected.
Figure 2-9. Doppler OCT sample beam.
One way to calculate the Doppler shift frequency is based on short time Fourier
transform (STFT) algorithm [125]. Interference signal intensity received at the
photodetector is a function of time. Different time corresponds to different depth
through reference mirror scanning velocity, depth rvZ . Interference signal
))(2cos()()( tfftAtI Dr . The spectrogram of a signal )(tS can be estimated by

51
computing the squared magnitude of the STFT of the signal )(tS , as shown
here: 2
),(ˆ),(ˆ fISTFTfImspectrogra ii . i represents the i'th time window ),( ii .
Each time window has a pixel size of vl . The spectrogram is an estimation of the
power spectrum of the time domain signal. And is an estimation of the power
intensity at frequency during the i'th time window. For structural OCT image, intensity
is obtained by calculating the spectrogram at carrier frequency rf , and the number is
mapped back to its depth location through its time window. In order to obtain Doppler
images, real carrier frequency is needed for each time window. And Drc fff is
obtained by calculating the centroid of the measured power spectrum.
m
miODTmiODT
m
mc ffff ),(ˆ/),(ˆ
(2-15)
This STFT method is effective. Yet its limitation lies in the fact that the minimum
detectable Doppler frequency shift is inversely proportional to pixel window time [126],
[127]. This introduces tradeoff between detection sensitivity and imaging speed, as well
as spatial resolution.
To overcome this problem, a phase resolved signal processing method is
proposed [128]. As shown in Figure 2-10, this algorithm compares the phase change in
consecutive A-lines to compute the carrier frequency: Tf KKD /1 . Hilbert
transform is used to obtain phase information. The detected interference signal is
)cos()( ttAt , Hilbert transform can be applied to obtain the complex signal as
shown in equation (2-16).
)()()sin()()cos()(
)()()(
~ tietAttiAttAdt
Pi
tt
(2-16)

52
Figure 2-10. Consecutive A-Line scans in Doppler OCT
Doppler frequency shift is determined by the average of n numbers of A-lines
frequency shifts, each one is expressed in the following equation, j is the number of A-
line, and T is the time between each A-line.
))((
1
))()((
1
*
1 )()()()()(~
)(~ 1 ti
jj
tti
jjjjjjj etAtAetAtAtt
(2-17)
)))(
~)(
~Re(
))(~
)(~
Im((tan
2
1
2
)()(
*
1
*
11
tt
tt
TT
ttf
jj
jjj
j
(2-18)
Polarization Sensitive OCT
Certain tissues such as retina, meniscus, tendons etc. have birefringence
property. When such types of tissues are injured, this property will be damaged or lost.
By detecting the polarization states of reflected light, birefringence information of the
sample can be obtained. PSOCT has been reported to be used for measuring the
sample reflectivity, phase retardation, Stokes parameters, Muller and Jones matrix,
birefringent axis orientation and diattenuation [129]-[138].
Most of early works are based on the setup proposed by Hee et al. [129], system
schematic is shown in Figure 2-11. Input light from the light source is linearly polarized
by going through a polarizer. Horizontally polarized light can be described
Axial scanning
Lateral scanning

53
as
0
10EE using Jones Matrix, in which tikAE exp)(00 . This linearly polarized
light is then split into reference arm and sample arm by a 50/50 beam splitter, written
as
0
1
2
100 EES and
0
1
2
100 EER separately. A quarter-wave plate, with its fast
axis 22.5° to the X-axis is inserted in the reference arm. Light goes through it twice as it
is reflected from the reference mirror, the slow axis has a phase delay of 180°
compared to the fast axis, and the output light from the reference arm is linearly
polarized with 45° to the X-axis, )2exp(1
1
2
101 rR kliEE
. rl is the travel distance from
the beam splitter to the reference mirror. The amplitude of X-axis and Y-axis are equal
from the reference arm. In the sample arm, a quarter-wave plate with its fast axis 45° to
the X-axis is used, circularly polarized light is incident upon the sample, the Jones
Matrix for the quarter wave plate is
1
1
2
1
i
iJW . Assuming the birefringent axis of the
sample has an angle to the X-axis, and the phase retardation between the fast and
slow axis is . The Jones Matrix of the sample can be expressed as
)(sin)2
exp()(cos)2
exp()2
sin()cos()sin(2
)2
sin()cos()sin(2)(sin)2
exp()(cos)2
exp(
22
22
iii
iii
J s
(2-19)
Using Jones Matrix, the light coming back from the sample can be expressed as
)2exp()()cos(
)sin()2exp(
2
1
)2exp()0
1(
2
1)()(
0
01
sS
sSWSSWS
kliEdRi
kliEJJdRJJdE
(2-20)

54
In this equation, dRS is the sample's reflectivity, sl is the sample path length,
which equals 0l , the distance from the beam splitter to the sample surface, plus d , the
depth into the sample; as shown in this equation dlls 0 .
Figure 2-11. Free space PSOCT system setup.
The two beams of light recombine at the beam splitter, and are divided by the
polarization beam splitter (PBS2) into two orthogonal polarization states. The
interference signals of each polarization state are detected by two photodetectors
separately. The horizontal and vertical signals at the photodetectors are shown in the
following equations.
0)2exp()sin()2exp()(2
)2exp(
2
1EkliidR
kliE sS
rH
(2-21)
0)2exp()cos()(2
)2exp(
2
1EklidR
kliE sS
rV
(2-22)
The current detected at the photodectors are shown in equation (2-23) and
equation (2-24). is the detector sensitivity, which is assumed to be the same for both

55
detectors; and l is the path lengths difference between reference and sample
arms sr lll .
8
)()22cos()sin()(22)(sin)(21
2
022 kAlkdRdREi SSHH
(2-23)
8
)()2cos()cos()(22)(cos)(21
2
022 kAlkdRdREi SSVV
(2-24)
The cross-correlation part of the signal is the interference signal,
22
)()22cos()sin()(
2
0 kAlkdRi SHac
(2-25)
22
)()2cos()cos()(
2
0 kAlkdRi SVac
(2-26)
Assuming the light source has a Gaussian power distribution, )(kS is the spectral
density, and is the FWHM,
2
02ln2l is the coherence length, integrating the
signal over the light spectrum gives
)22cos()sin(
])2ln2
(exp[)(22
)()22cos(
)sin()(22
0
20
0
lk
l
ldR
PdkkSlk
dRP
dkiI
S
SHH ac
(2-27)
)2cos()cos(
])2ln2
(exp[)(22
)()2cos(
)cos()(22
0
20
0
lk
l
ldR
PdkkSlk
dRP
dkiI
S
SVV ac
(2-28)
The signal at this point is demodulated at the carrier frequency to eliminate
the lk 02cos term,

56
)sin(2ln2
exp)(22
2
0
l
ldR
PI SH
(2-29)
)cos(2ln2
exp)(22
2
0
l
ldR
PI SV
(2-30)
Let
2
2ln2exp)()(
l
ldRdR SSr
, and by eliminating the constant term
22
0P, the signals can be expressed by the following equations.
)sin()(22
0
dRIP
S SrHH
(2-31)
)cos()(22
0
dRIP
S SrVV
(2-32)
The reflectivity of the tissue can then be calculated from22
)( VHSr SSdR , and
the phase retardation is
V
H
S
Sarctan .
As is shown in equation (2-27) and equation (2-28), the birefringence axis
orientation is only related to horizontal polarization. So to obtain , we need to obtain
the phase difference between vertical and horizontal polarization. This information can
be obtained by signal processing introduced in Section: Doppler OCT. Using Hilbert
transform, 22 0 lkH and lkV 02
can be obtained, and
2
180 VH
can
be calculated.

57
Time Domain OCT System in BML
A time domain OCT system is employed in BML. The schematic of the system is
shown in Figure 2-12. The employed broadband light source (DenseLight, DL-BX9-
CS3159A) has a minimum power of 15 mW, its center wavelength is 1310 nm, and its
FWHM (full width half maximum) is 75 nm, resulting in a 10 µm axial resolution in air.
The input light is divided into the reference arm and the sample arm by a beam splitter.
Depth scanning at the reference arm is realized by a rapid scanning optical delay line
(RSOD), the scanning range is 0 to 1.6mm depth. The RSOD employs a galvanometer
scanning at 1 kHz. We use a 500 kHz carrier frequency for the OCT signal, and it is
generated by the small misalignment between the galvanometer center axis and the
optical axis. MEMS based probes are used in the sample arm to perform 2D transverse
scanning, which will be introduced in detail in Chapter 3. The OCT signal is detected by
a balanced photodetector, acquired by a DAQ card (NI PCI-5122), and processed by a
computer. The frame rate of our system is 2.5 frames/sec, and the sensitivity is 74 dB.
Figure 2-12. OCT system schematic.
Here, a detailed description of the RSOD will be presented. The grating based
RSOD employs a blazed diffraction grating, an imaging lens, a scanning mirror and a
Light source 2×2 Beam
splitter Circulator
RSOD
Photo detector
Endoscopic probe DAQ PC

58
double pass mirror. The RSOD configuration is shown in Figure 2-13. This design is
based on optical Fourier transform. When diffraction grating is placed at the front focal
plane, the Fourier transform of the optical signal can be obtained at the imaging focal
plane. One of Fourier transforms' properties is that a linear phase ramp in the frequency
domain corresponds to a delay in the time domain. The phase change can be induced
by tilting the scanning mirror. In this case, the signal is modulated in its Fourier domain,
and then transformed back to time domain to realize depth scanning.
Figure 2-13. RSOD configuration
Figure 2-14. Ray trace of RSOD with no center misalignment. A) Green light representing center wavelength, B) Blue light representing an additional wavelength.
A B

59
The scanning depth can be calculated through optical ray trace. The broadband
incident light is dispersed by the blazed grating and its spectrum is imaged on the
scanning mirror. The initial position of the grating, lens and scanning mirror are parallel
to each other. The incident angle of the light beam to the grating is , the diffraction
angle is . The blazed grating equation is mp sinsin , p is the grating constant,
which equals to mm300
1 in our system, m is the diffraction order, normally 1m . Take
the green light as the center wavelength 0 for example, as shown in Figure 2-14 A. The
RSOD is designed to give 0 a 0 diffraction angle, which means 00 , so we obtain
0sin p . In our system, nm13100 , so
14.23arcsin 0
p
. When the scanning
mirror has a tilting angle of , its optical path lengths change compare to 0 tilting one
way can be expressed by the following equation
p
f
pfff 00 2
2sin2sin)2sin(
(2-33)
Due to the double pass design and the direction in the graph, the actual scanning
range is p
f04 . In our system, the scanning depth is designed to be 1.6 mm, so the
tilting angle of the galvanometer should be 97.0017.0 rad . Now consider
dispersion, when there is a second wavelength as shown in Figure 2-14 B. Its
scanning range can be expressed as
fp
f4
4 0 . We can obtain 0sinp ,
based on the grating equation. When is small, p
0 and its scanning range can
be expressed as

60
)2(4
44
0
00
p
f
pf
p
fZ scan
(2-34)
The phase change induced is
12
422 0
p
fzscan . Knowing
that
2 , can also be expressed as
12
42
0
p
f. At this point, we can see
that by tilting the scanning mirror, phase change induced is in linear proportion to light
frequency. Delay in time domain is expressed by group delay, which is defined
as
d
dg
.
So by employing the grating based RSOD, dispersion can be eliminated, and a
constant group delay linear to scanning angle is generated throughout the spectrum,
which is0
16
p
f . When there is a misalignment between the center of the scanning
mirror and its axis of rotation, a carrier frequency can be generated. For a source with a
symmetric spectral distribution, carrier frequency is defined by the temporal rate of
phase change at the center wavelength. When the misalignment is x , carrier frequency
in RSOD can be expressed as scan
carriert
xf
14
. This parameter is linear to
misalignment x . In our system, carrier frequency is designed to be 500 kHz, and the
galvanometer scanning frequency is 1 kHz, so the period of the galvanometer is 1 ms,
and mstscan 5.0 , the misalignment mmx 8.4 . When the system is perfectly aligned, that
is 0x , there will be no carrier frequency, no matter what the scanning angle is.
Therefore, the phase delay and group delay can be separated, and controlled
individually. Spectrum of the carrier frequency induced by this method can be obtained

61
by calculating the derivative of carrier frequency with respect to wavelength, as in
2
4
scan
carrier
t
x
d
dfBandwidth . The bandwidth is about 28 kHz in our system. In
signal processing, filter bandwidth is normally 2 to 2.5 times of this bandwidth to avoid
the loss of signal, while keeping the system sensitivity.
Summary
In this chapter, the principle of OCT system has been introduced. OCT imaging
could be conducted in both time domain and frequency domain. Different depth
scanning mechanisms for time domain OCT system have been reviewed. Two types of
frequency domain OCT system configurations have been introduced. The differences
between time domain and frequency domain OCT have also been discussed. Two types
of functional OCT have been presented in this chapter. The principle of Doppler OCT
was introduced along with two different algorithms for extracting Doppler information.
For PS OCT, its principle and background were presented. Finally, the configuration
and performance of the time domain OCT system employed in this study was
introduced in detail.

62
CHAPTER 3 ELECTROTHERMALLY ACTUATED MEMS MIRRORS
A series of MEMS mirrors based on electrothermal actuation mechanism have
been developed in BML aiming to be applied in endoscopic OCT imaging applications.
This chapter first introduces the principle of electrothermal actuation, and then goes on
to introduce four generations of BML electrothermal MEMS mirrors; their designs and
characteristics will be presented.
Electrothermal Actuation
As mentioned briefly in Chapter 1, electrothermal actuation is based on bending
motion of bimorph beams. Bimorph beams are cantilever beams that are composed of
two different kinds of materials. Due to the difference in thermal expansion coefficients
in the two materials, when heated, the bimorph beam will bend. And that is the basic
principle of electrothermal actuation. Joule heating effect describes the phenomenon
that heat is generated when current goes through a resister; it is normally the source to
provide heat to bend the bimorph beams.
Figure 3-1 depicts the basic geometrical relationships between the substrate, the
bimorph beams, and the rigid frame of one actuator. The materials chosen for bimorph
beams are Al and SiO2, and Pt is chosen as the heating material. After the beam
structure is released, the residue stress will cause the bimorph beam to curl up, the
initial tilting angle can be calculated by
L
, as shown in Figure 3-1, l is the length of
the bimorph, is the tilting angle, and is the radius of curvature of the beam. When
applied with voltage, the actuator will be heated up due to Joule heating effect, Al has a
bigger thermal expansion coefficient than SiO2, which will cause the bimorph beam to

63
bend downwards. The scanning angle is proportional to the power, so it can be
controlled through controlling driving voltage for the actuator.
Figure 3-1. Eletrothermal bimorph structure.
1st and 2nd Generations Electrothermal MEMS Mirrors
Several actuator or MEMS mirror designs based on this structure have been
proposed, including both 1D and 2D mirrors. The MEMS mirror shown in Figure 3-2 A
has 1D scanning capability, it employed a series of bimorph beams, and the solid frame
is sputtered with Al as the mirror surface. To add a second scanning dimension, another
set of bimorph beams are added to the frame in the direction that is perpendicular to the
first set, as is shown in Figure 3-2 B [139]. 2D scanning can be realized by controlling
the 2 sets of bimorphs separately. For this design, the inner axis can scan up to 40° at
15 Vdc, and the outer axis can scan 25° at 17 Vdc. These mirrors belong to the 1st
generation mirror design.
Al Si SiO2 Pt
on actuation

64
Figure 3-2. 1st generation MEMS mirrors. A) 1D MEMS mirror, B) 2D MEMS mirror.
Despite the large scanning angle achieved by the 1st generation mirrors, the
drawback is obvious too. The center of the mirror plate shifts as the mirror rotates,
making optical alignment difficult and can cause artifacts in the imaging results. To
solve this problem, the 2nd generation mirror design was proposed by adding a set of
compensating bimorph beams to the frame on the same axis as the mirror anchor, as
shown in Figure 3-3. By matching the driving voltages for the two sets of bimorph
beams, mirror plate center shift can be eliminated. However, only piston motion can be
realized, therefore, it is not suitable for OCT application, which requires 2D scanning
capability. To add another scan dimension in order to realize tip-tilt motion, another set
of bimorph can be added on the perpendicular axis, similar to the previous design. Yet
the resulting structure is too complex, and the fill factor is very small, only around 5%.
The other disadvantage that makes this design not practical is that due to the variation
in fabrication process, the resistance values of actuators vary; each mirror has its own
driving voltage ratio which needs to be measured individually through experiment. A
more practical 2D MEMS mirror design suitable for OCT is therefore desirable.
A B

65
Figure 3-3. 2nd generation: lateral shift free (LSF) MEMS mirror design. A) LSF bimorph actuator design, B) top view model of 1D LSF MEMS mirror, C) SEM of 1D LSF mirror, and D) SEM of 2D LSF MEMS mirror.
LSF-LVD (3rd) and FDSB (4th) Electrothermal MEMS Mirrors
The 3rd and 4th generations of electrothermal MEMS mirror designs were later
proposed for endoscopic OCT imaging applications. They are the Lateral-Shift-Free
(LSF) Large-Veridical-Displacement (LVD) design and the folded-dual-S-shaped
bimorph (FDSB) design. The two designs and their characteristics will be reviewed in
this section.
LSF-LVD MEMS Mirror
LSF-LVD design is proposed to solve the design problems mentioned in the last
section. It is named Lateral-Shift-Free (LSF) Large-Veridical-Displacement (LVD)
because in this design, the mirror center does not shift during scanning, and large
vertical displacement of the mirror plate can be realized [140]. Each LSF-LVD actuator
is composed of three Al/SiO2 bimorph beams and two rigid silicon frames. Pt is
A B
D C

66
embedded as the heater. Each actuator is connected to a bonding pad on the front
surface of the mirror substrate. And they all share a common ground, which is
connected to the middle pad. Electrical connections to the actuators can be made
through the pads. The folded design effectively shrunk the area size of the actuators,
making high fill factor possible. In order for the structure to compensate the lateral shift
and tilting during vertical displacement, the dimensions of the five components of each
actuator need to meet the requirements established in equation (3-1). As is shown in
Figure 3-4 A, L1, L2 are the lengths of the two frames, and 1l , 2l , 3l are the lengths of
the three bimorph beams.
21
2312
1
LL
lll
(3-1)
Figure 3-4. LSF-LVD eletrothermal actuator and mirror design. A) side view of actuator and relationship between each element, B) top view of the MEMS mirror.
The mirror plate is held by four identical actuators. The size of the mirror plate is 1
mm × 1 mm, and the substrate is 2 mm × 2 mm, resulting in a high fill factor of 25%.
Upon release, the residual stress will cause the bimorph beams to bend, holding the
mirror plate out of plane, and parallel to the substrate. The initial elevation is about 600
µm, leaving enough space for the mirror plate to either move downwards or tilt. This
(a)
Mirror Plate
ACT 1
ACT 3
AC
T 2
AC
T 4
Bonding
pads A B
Mirror plate
Bimorph III
(l3) Frame II (L2)
Bimorph II (l2)
θ0
θ0
Frame I (L1)
Bimorph I (l1)

67
mirror can realize piston motion, when the same voltages are applied on all four
actuators; it can realize tip-tilt motion, when differential voltages are applied on 2
actuators on opposite sides of the mirror. 2D scanning can easily be performed when 2
sets of differential voltages are applied on the 2 pairs of actuators controlling the tip-tilt
motion in 2 directions that are perpendicular to each other. During scanning, the
effective optical aperture size will not change, because the rotation center is fixed along
the center of the mirror, optical alignment is also made easy as a result.
Figure 3-5. Electron micrographs of the 2D MEMS mirror. A) the whole device, B) the LSF-LVD actuator, and C) the first bimorph section.
Figure 3-6 A and B show the measured characteristics of the MEMS mirror. As we
can see from Figure 3-6 A, the piston displacement response is linear between 1.5 V
and 4.5 V, and more than 600 µm displacement can be achieved with only 5.5 V
voltage. Figure 3-6 B shows that ±31 optical scan angles can be obtained at a
maximum of 5.5 V, of which, ±(5~31°) optical scanning ranges are linear. As shown in
Figure 3-6 C, the average deviation of the measured results from the linear fit is only
about 0.83% for a large optical scan range up to 26. The frequency response of mirror
is shown in Figure 3-6 D. The mirror has a 10 dB cutoff frequency of 13 Hz. Figure 3-6
1mm 500 µm
100 µm
A B
C

68
E and F are two scanning patterns obtained by driving the MEMS mirror. The raster
scan pattern is obtained by differentially driving two opposite actuators with ramp
waveforms of 0.5~3.8 V at 320 Hz (~30) and 0.5~3.8 V at 8 Hz (~36) for the two
orthogonal directions, respectively. The Lissajous pattern is obtained by shifting the fast
axis frequency from 320 Hz to 300 Hz.
Figure 3-6. MEMS mirror experimental results. A) vertical displacement versus voltage, B) optical scan angles versus voltage applied on each actuator, C) linear fit of measured optical angle by driving actuator 1, D) frequency response of the MEMS mirror, E) a raster scan pattern, and F) a Lissaious scan pattern.
E F
C
A B
D

69
Light Weight Large Aperture LSF-LVD MEMS Mirror
Built upon the LSF-LVD actuator design, a light weight large aperture mirror
design was proposed. Having a large mirror aperture has a few benefits, including
making optical alignment easier, and being able to accommodate larger optical beam,
which could in turn help improve the system resolution. A large mirror plate of 3 mm × 3
mm is chosen for this design.
Figure 3-7. MEMS mirror used for lateral scan. A) SEM of the front side of the MEMS mirror, B) SEM of the back side of the MEMS mirror showing the Si ribs structure, C) layout of the MEMS mirror, and D) characterization of the MEMS mirror: optical scan angle vs. voltage.
To be able to support a larger mirror plate, more actuators were employed. Instead
of using one actuator on each side, four identical LSF-LVD actuators were placed on
A B
C D

70
each side, resulting in a total of 16 actuators. However, large mirror plate leads to low
resonant frequency. In order to keep up the bandwidth of the mirror, a light-weight
mirror structure was employed to reduce the mass of the mirror plate. The light-weight
structure is realized by employing silicon ribs on the backside of the mirror plate for
support, instead of using a solid silicon layer. The mirror plate mass was reduced to
21.8% of its original mass. And the measured tip-tilt resonant frequency was 445 Hz.
The MEMS mirror can scan ±6.5° when a 4 Vdc driving voltage is applied. This design
was later used in the free space OCT setup for brain tissue refractive index
measurements.
FDSB MEMS Mirror
To further increase the mirror fill-factor and enable smaller probe designs, a flip-
chip bonding hidden actuator design is proposed. This design is the 4th generation; it
employs a folded-dual-S-shaped bimorph (FDSB) actuator design to compensate the
curling of one bimorph beam and realize vertical displacement [141], as shown in Figure
3-8. Two bimorph beams of equal but opposite curling angles are connected in series to
compensate the curling of each other, therefore pure vertical displacement can be
realized at the end without lateral shift and tilting. For the two bimorph beams to have
the same curling angle, several geometrical requirements need to be satisfied, including
a certain length ratio of the two beams 31 / LL and an optimized thickness ratio between
each layer in fabrication. Another constraint is that for the hidden actuator design, the
total length of each actuator must fit under the mirror aperture, which sets a total length
limit for the bimorph beams. Table3-1lists the optimized structure parameters that yield
an initial displacement of 315 μm by thermal stress at 300°C.

71
Figure 3-8. FDSB actuator design. A) single S-shaped bimorph, B) use 2 S-shaped to convert curling into vertical displacement, and C) actual FSDB actuator structure.
Figure 3-9. FDSB MEMS mirror. A)schematic with mirror surface facing down, B) schematic with mirror surface facing up, C) SEM with mirror surface facing down, and D) SEM with mirror surface facing up.
B
Bimorph beams
Mirror surface
Flex-PCB
A
C D
SiO2 Al A B C

72
Table 3-1: Optimized structure parameters of FDSB actuator
Fixed Values Optimized Values
Thickness (µm) Adhesion SiO2: 0.05 Function Al : 1.0 Function SiO2 (1st): 1.0 Heater Pt: 0.2 Insulation SiO2: 0.2 Function SiO2 (2nd): 1.4 Adhesion Cr: 0.01
Section length (µm) Total length L: 410 L1=252, L2=20, L3=138
Figure 3-10. Characterization of the FDSB mirror. A) DC response of vertical displacement, B) DC response of optical angle, and C) frequency response.
A
B
C

73
This mirror uses the device layer of SOI wafer as the mirror plate, and the
actuators are formed on top of the wafer. After the device is released, the mirror plate
move downwards and got hidden inside the device. The electrical connecting pads are
formed on the surface of the device frame, and the mirror surface is on the other side.
When the entire device is flipped over, the MEMS mirror can be used as a scanning
engine. The schematic and SEM picture of this design is shown in Figure 3-9.
The mirror aperture size is 1 mm × 1 mm, and the chip size is 1.55 × 1.7 × 0.5
mm3. The fill-factor of this design is as high as 32%, and the device volume is only 1.3
mm3. An initial downward displacement of 340 µm was achieved, and after a self-
annealing and burn-in process, the displacement can increase to 375 µm. The mirror
plate is 25 µm below the top surface when the mirror is flipped over for scanning.
Characterizations of the mirror are shown in Figure 3-10. Applying 4.8 Vdc on all four
actuators, vertical displacement of 319 µm has been achieved, and by driving opposing
actuators differentially, optical scanning angle up to ±23° has been obtained. The
frequency response figure suggests that the mirror has a resonant frequency of about
406 Hz, and the thermal decay is only 1 dB at 200 Hz. The mirror surface curvature is
about 10 m, and the surface roughness is ~20 nm.
Summary
This chapter first introduced the principle of electrothermal actuation mechanism.
And then four generations of MEMS mirrors developed at the BML were presented. The
first generation MEMS mirrors are capable of realizing large scan angles of up to 40°.
However, they have the disadvantage of mirror center shifting during scanning. The
second generation MEMS mirrors overcome the center shifting problem, and can realize
large piston motion movement. Yet, they could not realize tip-tilt motion. The third

74
generation MEMS mirrors employed a LSF-LVD actuator design. And they could realize
both tip-tilt and piston motions, while maintaining mirror center position during scanning.
Detailed designs and characterizations of two types of the third generation MEMS
mirrors were introduced. The first type employed four LSF-LVD actuators, and achieved
25% fill factor, with a mirror aperture size of 1 mm × 1mm on a mirror chip of 2 mm × 2
mm. This mirror design was used for the first three generations of endoscopic probes.
The other type of the third generation mirrors is the light weight large aperture MEMS
mirrors. They employed 16 LSF-LVD actuators, placing 4 on each side of the mirror
plate, and realized a mirror aperture size of 3 mm × 3 mm. These mirrors were used in
the free space OCT system for refractive index measurements. The fourth generation of
MEMS mirrors achieved an even higher fill factor of 32%, by decreasing mirror chip size
to 1.55 mm × 1.7 mm, while maintaining the large mirror aperture size of 1 mm × 1mm.
Design and characterization of these mirrors were also introduced in details. This mirror
design was employed in the fourth generation MEMS probes.

75
CHAPTER 4 OCT ENDOSCOPIC IMAGING BASED ON MEMS
This chapter focuses on endoscopic OCT imaging using probes built with MEMS
mirrors. Four generations of probes will be introduced. The optical and mechanical
designs of the probes will be presented first; then the probe assembly and packaging
schemes will be discussed; after that, results of probe in vivo OCT imaging experiments
will be demonstrated; issues with probe imaging will be discussed at last.
MEMS Endoscopic Probe Design
The goal of this study was to build a side-view endoscopic imaging probe using
the electrothermal MEMS mirrors as the scanning engines. The endoscopic probes
could be used by themselves for OCT imaging or be fitted into an existing endoscopic
probe so that other functions could be performed as well as OCT imaging. The desired
probe size is less than 2.8 mm. To reach this goal, four generations of probes were
built, the packaging schemes were improved along the way, and the probe sizes were
reduced from 5 mm to 2.5 mm by the 4th generation.
OCT probes are connected to the sample arm of the OCT systems, they serve
several purposes. They direct light onto the target sample, and collect the signal back-
scattered from the sample and transfer it back to the system to form interference
patterns. The probe should be able to focus the beam from sample arm to 1-2 mm
underneath the tissue surface, and scan the incident beam transversely to form 2D or
3D images. Figure 4-1demonstrates a typical OCT probe. It is consisted of four
components: optical fiber, graded index (GRIN) lens, MEMS mirror and the probe head
mount that holds the other 3 components. In the following sections, detailed optical and
mechanical designs will be presented.

76
Figure 4-1. Typical MEMS probe design.
Probe Optical Design
The three major optical components in an OCT probe are single mode optical
fiber, GRIN lens and MEMS scanning mirror. Optical fiber is used to deliver and collect
optical signal from and to the system; GRIN lens is used to focus the light beam; and
MEMS mirror is used to direct the focused beam for transverse scans. Figure 4-2
demonstrates the positional relationship of the components (optical fiber is omitted; only
the output beam from the fiber is shown in the figure).
Figure 4-2. Optical components of the probe.
MEMS mirror
GRIN lens
Output light beam from fiber

77
Single mode fiber (corning SMF-28) is chosen to avoid modal dispersion in light
transmission. Core diameter of the fiber is 8.2 µm, its effective refractive index is 1.4677
at 1310 nm, its numerical aperture is 0.14, its cladding diameter is 125±0.7 µm, and the
coating diameter is 900 µm. One end of the fiber has FC/APC connector to connect with
the OCT system, while the other end (distal end) emits light to the GRIN lens, and the
connection is made by using optical adhesive (Norland Optical Adhesive 61), when
cured, the refractive index of the adhesive is 1.542 at 1310 nm. Here, the optical
adhesive not only connects the fiber and GRIN lens physically, it also helps to reduce
refractive index mismatch. The distal end of the optical fiber is cut with an 8° angle to
avoid backreflection from the fiber end, which, if not removed, may saturate the OCT
signal detected by the photodetector. GRIN lens used for focusing is of cylindrical
shape, which, compared to traditional circularly shaped lenses, is easier to package in
smaller spaces. The GRIN lens has a center axis refractive index of 1.6164, a gradient
constant of 0.8521 mm-1, and a working distance of about 5 mm for 1310 nm when it is
placed about 0.034 mm after the fiber. The diameter of the GRIN lens is 700 µm, and
the length is about 1.955 mm. The MEMS mirror is placed at about 1-2 mm after the
GRIN lens. The exact distance varies with different mechanical designs, which is
affected by probe diameters and working distances desired, and more details will be
discussed in the following section.
Probe Mechanical Design
Mechanical design of the mount base is important, because the mount base is
used not only to hold the components in place, but provide electrical connection to the
MEMS mirror.

78
The first 3 generations of endoscopic OCT probes were designed and assembled
based on the 2 × 2 × 0.5 mm3 LSF-LVD mirrors. The first 2 generations are designed to
have a diameter of 5 mm and a working distance of about 1.5 mm in air, as shown in
Figure 4-3. A 0.5 mm-deep cavity is cut out in the base for the MEMS chip to fit in, and
the mirror plate is 45° to the central axis of the probe.
Figure 4-3. Mechanical dimensions of the probe (not drawn to scale).
For the 1st generation probe, a two-piece design using Lucite as material was
chosen. One piece is used to hold the MEMS mirror, while the other piece is for the
other optical components, including fiber and GRIN lens. The MEMS piece has a
protruding part, and the other piece has a matching slot, through which, the two pieces
could be registered together. The two-piece design is intended to protect the MEMS
mirror by separating its assembly process from that of the other optical components,
therefore increasing the chance for successful assemblies. Electrical connection was
made through wire-bonding and conductive gluing. First, five gold wires were bonded to
the pads on the MEMS mirror chip. Then, the MEMS chip was placed and glued in the
cavity designed for it. Next step was to glue the gold bonding wires to the copper wire
embedded in the probe using silver epoxy (Figure 4-4 B). Then two pieces were

79
registered together through the slot. After all the above steps were completed, the probe
was inserted into flexible, biocompatible, transparent fluorinated ethylene propylene
(FEP) tubing with 5.8 mm outer diameter. A finished probe is shown in Figure 4-4 C.
Figure 4-4. 1st generation probe design. A) fabricated probe body in Lucite, B) electrical connection of MEMS mirror to the probe, and C) packaged probe next to a one cent coin.
There are several issues associated with this design. First, the two-piece design
increases the requirements for fabrication precision in order to obtain desired alignment
between the mirror and the optical components. Second, the process of embedding
copper wires increases the fabrication complexity results in price rise of the probe.
Third, high temperature required for curing silver epoxy can cause the Lucite material to
deform, which will cause difficulty, sometimes even failure in registering the two parts
during assembly.
To overcome these problems, a 2nd generation design using one piece base
mount was proposed, alignment was made easy using this new structure. Stainless
steel is chosen to be the probe material since precise fabrication of this material is
readily available, and its deformation under high temperature is negligible. Copper wires
are not embedded in the probe; rather, they are connected through a rigid custom-
designed printed circuit board (PCB). The PCB was designed to fit into the slot on the
A B C

80
top of the probe. On the PCB, five through holes (vias) were drilled to provide
connections from the front layer to the bottom layer; on the front layer, five conductive
pads were placed in a row, each connected with one via through a thin copper wire
embedded in the layer. To form electrical connection, five copper wires were put
through the vias and soldered from the back side of the PCB; and the bonding wires
from the MEMS mirror are glued to the pads on the front layer of the PCB. The rest of
the assembly process is similar to the design before. The diameter of the probe mount
was 5 mm; after being inserted into the FEP tubing, the packaged diameter was 5.8mm.
Figure 4-5. 2nd generation probe design. A) 3D model of the assembled probe, B) assembled probe in stainless steel.
The successful implementations of the previous designs lead to further probe
miniaturization. To save space in electrical connection, flexible PCB was introduced. 5
copper pads were placed in a row on the front side of the PCB, and these pads are
connected to the back side to 5 soldering pads, which will then be soldered to five
copper wires for driving signals. In this design, a rectangular slot is cut through the
probe, and flexible PCB was inserted through it and glued to the mount base. MEMS
mirror is then placed on top of the PCB. 5 gold wires with one side wire-bonded to the
MEMS mirror and the other side conductively glued to the PCB were used to electrically
A B

81
connection the MEMS mirror to the PCB. This design belongs to the 3rd generation, it
has successfully reduced the diameter of the probe to 2.8mm. 3D views of the probe
are demonstrated in Figure 4-6.
Figure 4-6. 3rd generation probe design. A) mechanical design for the probe, B) electrical connections of MEMS mirror and flex PCB, C) 3D model of the probe, and D) assembled probe with flexible PCB.
Inspired by the 3rd generation design, a new 4th generation prototype based on the
DFSB mirror was developed to further decrease the probe size. This design has a
diameter of 2.5 mm and length of 10 mm. The working distance is designed to be about
2 mm in air. The electrical connection has been made easy due to the special design of
DFSB mirrors, which have their connection pads on the backside of the mirror frame. In
A
B
C D

82
this design, no wire-bonding process is necessary, therefore, a lot of space could be
saved and further miniaturization was possible.
Figure 4-7. DFSB probe design. A) mechanical design of the probe, B) 3D model of probe frame, and C) 3D model of assembled probe.
Similar to the 3rd generation design, this probe uses flexible PCB for electrical
connection. The difference is that electrical connection can be made by directly placing
the MEMS mirror on top of the flexible PCB, therefore eliminating the wire-bonding
process. The pads pattern of the PCB is designed to match those of the mirror, as
shown in Figure 4-8 B. The flexible PCB is first glued to the probe, and then small
amount of silver epoxy is dispensed on the PCB bonding pads, MEMS mirror is aligned
to the PCB and both electrically and physically glued to the PCB through silver epoxy.
After the MEMS mirror is assembled to the probe, GRIN lens and fiber are installed. The
B C
MEMS mirror
GRIN lens slot
Open sidewall for MEMS mirror
Optical fiber slot Flex-PCB
Optical fiber
GRIN lens
Output beam
A

83
probe is then packaged with a transparent FEP tubing, which has an inner diameter of
2.5 mm and an outer diameter of 2.8 mm.
Figure 4-8. DFSB probe design. A) flexible PCB design, B) zoomed in view of the PCB head with bonding pads pattern, and C) packaged probe.
In Vivo Experiments
The 2nd and 4th generations have been employed in in vivo experiments to
demonstrate their abilities. For the two imaging sessions, the samples were the same
type female athymic (nu/nu) nude mouse with a body weight of 20 g to 26 g (Harlan
Laboratories, Indianapolis, IN). The mice were anesthetized by injecting ketamine (100
mg/kg) and xylazine (10 mg/kg) intraperitoneally. 2D transverse scans are done by
simultaneously driving all four actuators with one opposing pair for fast scan and the
other pair for slow scan.
With the 2nd generation probe, the actuator pair on the circumferential direction
was used for fast-axis scan, driven by 0~4 V differential ramp voltages at 1.25 Hz; and
the actuator pair on the longitudinal direction was used for slow-axis scan, driven by
0.5~3.5 V ramp voltages at 0.0125 Hz, therefore accumulating 100 frames of 2D images
Bonding pads Soldering pads
A
B C
MEMS mirror
GRIN lens
Optical fiber
Flex PCB

84
in 40 s for one 3D reconstruction. This generates a transverse area of ~2.3 × 2.3 mm2.
Both 2D and 3D images of the mouse tongue have been obtained. The 2D OCT image
shown in Figure 4-9 A was acquired using the MEMS OCT probe at the base of the
tongue. A stratified squamous keratinized epithelium (SSKE) and basement membrane
(BM) corresponding to the relatively strong signal bands from the upper layers of the
tissue structure were observed. Figure 4-9 B shows a reconstructed 3D image of the
same mouse tongue. 2D and 3D OCT images of the mouse ear have also been
obtained, and the results are shown in Figure 4-10. The ear thickness is about 500 µm.
The dermal structures and the subcutaneously adjacent layers were observed using the
MEMS OCT probe in this experiment. The cartilage (C) of the ear was represented in
the middle by the dark band and the dense conjunctive capsule (cc) with two bright
layers put around the cartilage. The superficial epidermis (E) of the mouse ear was
detected at the first and last of the mouse ear longitudinally. The lower and upper areas
from the dense conjunctive capsule to epidermis, the dermis (D), were observed. Figure
4-10 B shows the 3D reconstruction image of the ear.
Figure 4-9. In vivo OCT images of mouse tongue. A) 2D image of a mouse tongue, B) 3D image of a mouse tongue.
1mm A B
SSKE
BM
SSKE
BM

85
Figure 4-10. In vivo images of mouse ear. A) 2D image of a mouse ear, B) 3D image of a mouse ear.
Using the 4th generation probe, mouse ear and tumor were imaged. For this
imaging session, human breast cancer cells, 4T1 mammary carcinoma cell line, were
injected into the subcutaneous tissue of the female athymic (nu/nu) nude mouse with a
total volume of 10 μl at a concentration of 10,000 cells / 10 μl. And the tumor cells had
been cultivated for ten days by the time of the imaging experiment. The ear imaging
results are shown in Figure 4-11 C. As have been reported for the 2nd generation probe,
the cartilage (C), the dense conjunctive capsule (cc), the superficial epidermis (E) and
the dermis (D) of mouse ear were also observed using this probe. The tumor imaging
results are shown in Figure 4-11 F-J. F and G are 3D reconstructions of the tumor area
from different angles, and H-I are the 2D cross-sectional images taken in areas pointed
in G. The tumor edge can be clearly seen in 3D images, and 2D images demonstrated
obvious difference between normal and tumor tissue areas, due to strong penetration
loss inside the tumor cell.
E
D
E
D
cc
cc
C
1mm A B

86
Figure 4-11. In vivo imaging results. A) mouse under ear imaging session, B) 2D image of mouse ear, C) 3D image of mouse ear, D) probe position of tumor imaging, E) injected tumor under microscope, F-G) 3D mouse tumor imaging results, and H-J) 2D images of tumor margin, locations are labeled in G.
Issues with Probe Imaging
There are a few factors that affect the optical qualities of the imaging probes,
including the relative positions change between the optical components due to the
variation in the assembly process, the mirror curvature, the plastic tubing protecting the
probe and effect of the non-telecentric scan, circled in Figure 4-12. To understand these
issues, Code V (Optical Research Associates) simulations were conducted. And a “free
space probe” was setup to confirm the simulation results.
(e)
1 mm Probe tubing sidewall
E
C cc
cc D C
E
D
A
Probe
Tumor region
Imaged margin
Tumor region
1 mm 1 mm 1 mm
B
C
F
D E
G
H I J
H I J

87
Figure 4-12. Demonstration of issues focused on in this study.
Code V builds optical models by defining properties of each surface. Figure 4-13 A
defines the optical system of the endoscopic MEMS OCT probe. The object surface in
this system is the fiber output; the object beam angle was defined by system numerical
aperture, which is 0.14 for single mode fiber. The distance between the fiber output and
the GRIN lens was defined in the thickness column, 0.05 mm in Figure 4-13 A. The next
two surfaces define the GRIN lens; thickness of 1.955 mm is the length of the lens and
“GRIN1310” is a user-defined GRIN material with center axis refractive index of 1.6164,
a gradient constant of 0.8521 mm-1 as the ones used in the probes. Surface #3 and #4
represent the MEMS mirror. The MEMS mirror is the only reflective surface in the
system, and it has a 45° decenter from the center axis. For the accuracy of simulation, a
dummy surface (surface #3) was used to generate the decenter. The mirror is placed
1.5 mm behind the GRIN lens. FEP tubing was simulated with two cylindrical shaped
surfaces with a uniform refractive index of 1.5; the inner surface diameter is 2.5 mm and
the outer surface diameter is 2.8 mm. The thickness of the image surface was defined
as a variable, meaning it could be changed automatically during simulation to find the
best focus position. In the simulation, the best focus position was found by geometrical
ray tracing. After the system is fully defined, it could be visualized with a 3D drawing as
shown in Figure 4-13 B. In this system, the Gaussian spot size at each plane could be

88
calculated using Gaussian beam tracking. Surface properties and thicknesses could be
varied to study the different issues mentioned earlier.
Figure 4-13. Code V simulation. A) optical system definition in Code V, B) optical system 3D model demonstration.
To confirm the simulation results, a setup was built using 3D movement stages to
simulate a free space probe. The setup consists of three 3D stages, each one
controlling the position of the fiber, the GRIN lens and the imaging target. The target
used in this study was a glass slide with a 1951 USAF resolution pattern. The resolution
of the system was determined by the finest pattern distinguishable from the OCT
images. And the focal length was recorded as the center of the clearest image range.
GRIN lens
Fiber output
FEP tubing
MEMS mirror 50 µm
B
A

89
Figure 4-14. Optical quality testing experiments. A) experimental setup for testing, B) 2D image of distinguishable pattern, and C) 3D image of distinguishable resolution pattern.
Effect of the Distance between the Fiber and the GRIN Lens
First of all, effect of the distance between the fiber and the GRIN lens on the focus
point of the GRIN lens was studied. The distance between the fiber and the GRIN lens
(L1) determines how far away the output light spot from the fiber tip will be focused at
(L2), therefore affects the working distance of the probe. L1 also has an effect on the
size of the focused spot. To understand how much effect the variation of L1 has on L2
and the spot size, code V simulations and experiments were conducted, and their
results showed good agreement with each other.
The results shown in Figure 4-15 suggested L2 changes non-linearly with L1; and
when L1 changes within 0.01 to 0.10 mm, the focal length changes more than 3 mm.
The desired working distance of about 5 mm can be obtained when L1 is controlled at
approximately 0.034 mm; and as long as L1 is smaller than 0.08 mm, the probe will
have an acceptable focal length of larger than 3.5 mm, meaning the beam focus will be
outside the probe sidewall, and could be focused inside the imaging sample. There is a
tradeoff between the working distance and spot size, as the working distance increase,
the spot size increases too. We have found the experimental results are in good
A
GRIN lens
MEMS mirror
Fiber
Target
B C
49.6 µm

90
agreement with simulation results when spot size is at 60% of the maximum intensity
from the simulation. The spot size is larger than 30 µm within the acceptable working
distances for this probe design.
Figure 4-15. Effects of the distance between the fiber and the GRIN lens. A) schematic of the testing setup, B) effect on focal length, and C) effect on spot size.
C
B
A

91
Effect of Mirror Curvature
Due to the fabrication process, MEMS mirror surface is not perfectly flat, and the
radius of curvature of the mirror not only affects the focal point position of the probe, but
generates astigmatism in the system, which could cause imaging quality to degrade. In
Code V simulation, Y radius for surface #3 controls the mirror curvature (Figure 4-16 A);
by changing this value to different radii of curvatures, different optical quality
corresponding to different mirror curvatures could be evaluated. Several mirror radii of
curvatures reported by our group was chosen for simulation. The smallest radius of
curvature reported was 0.132 m, and improved radii of curvatures of 0.15 m, 0.18 m, 0.8
m and up to 10 m for the 4th generation mirror were reported. In addition to these
reported values, two extreme cases of 0.1m and infinity (perfectly flat mirror plate)
radius of curvature were also simulated.
Figure 4-16. Code V simulation for effect of mirror curvature. A) optical system definition, B) 2D view of the optical system shown with 5 mm mirror curvature.
A
B
A
B

92
Figure 4-17 was obtained at L1 = 0.05mm. Focal length decreased with the
increase of mirror radius of curvature. This can be easily explained by the converging
capability of concave mirrors. Light converges faster with mirrors that have smaller
radius of curvature. And because of the same reasons, the focused spot size is smaller
when radius of curvature is smaller; this may seem desirable for the sake of higher
resolution; however, the drawback is that astigmatism becomes more and more serious
as the radius of curvature decreases. When there is astigmatism in the system, light in
the sagittal direction and the meridional direction will be focused at two different planes,
the focus for this type of system is then in between the two focal planes where the circle
of least confusion is formed. As a result of astigmatism, the focused spot deform to an
elliptical shape, which would adversely affect the OCT image quality. From Figure 4-17
B, the eccentricity of spots remains smaller than 0.14 when the radius of curvature is
larger than 500 mm. And at 10 m radius of curvature, the astigmatism in the system
could be neglected.
These simulation results were compared with the focal lengths and resolutions
tested with the free space setup. The MEMS mirror used for this experiment is the 4th
generation FDSB MEMS mirror, and the mirror radius of curvature is about 10 m. Figure
4-18 A is the comparison between the tested focal length and the simulation results
when mirror curvature is 10 m. And Figure 4-18 B compares the tested system
resolution when L1 is 0.05 mm and 0.1 mm to the simulated full width half maximum
(FWHM) spot size. The results have suggested the tested result agrees well with the
simulation results for focal length. For the resolution, we can see that we could
distinguish slightly better than FWHM of the spot diameter with the MEMS scan system.

93
Figure 4-17. Effects of the MEMS mirror radius of curvature based on simulation. A) radius of curvature vs. focal length, B) radius of curvature vs. spot size.
Figure 4-18. Comparison of simulation and experimental results. A) distance between fiber and GRIN lens vs. focal length, B) distance between fiber and GRIN lens vs. spot size (simulation result is FWHM spot size at 10m radius of curvature, experimental result is best observed resolution pattern size).
Effect of FEP Tubing
In order to protect the probe head, after all the assembly process is done, the
probe is inserted into a fluorinated ethylene propylene (FEP) tubing. This section
focuses on the effects of this tubing on the optical qualities of the system.
First, to understand how adding the tubing would affect a system with no existing
astigmatism, MEMS mirror was excluded from the simulation; the tubing was placed
A B
A B

94
directly after the GRIN lens, as shown in Figure 4-19 A. This FEP tubing has an effect
similar to that of a cylindrical lens, introduces astigmatism to the system. From the result
shown in Figure 4-19, with the FEP tubing, focal length change increased from 0.0357
mm (at L1 = 0.2 mm) to 0.3561 mm (at L1 = 0 mm). At L1 = 0.34 mm, when the focal
length is about 5.0219 mm without FEP tubing, focal length increases to 5.0721 mm
when tubing is added. The increase is a result of the higher refractive index of the FEP
material, as demonstrated in Figure 4-19 D. As a result of astigmatism, at the focal
plane, the spots deform to elliptical shape. Figure 4-19 C shows the X, Y spots
dimensions at the focal point with different L1. For the probe to have a usable working
distance, the focal length should be larger than 3.5 mm; under these circumstances, the
eccentricity of spots are smaller than 0.24, and spot radius increased by about 1.5 µm
at most.
Then, the MEMS mirror was added back to the system simulation. As shown in the
last section, when mirror is not perfectly flat, it also causes astigmatism in the system. In
this case, the effect of mirror curvature and FEP tubing combines, and simulation result
have shown increased spot size and larger eccentricity at the same mirror curvature.
Figure 4-20 A shows that spot size increases more in the Y direction, and the spot size
increase is slight more evident for larger mirror curvature. Focal lengths increased
almost uniformly with FEP tubing. Using flat tubing or astigmatism correction lens in
combination with the cylindrical tubing may reduce the astigmatism in the system, and
may be further studies in the future.

95
Figure 4-19. Effects of FEP tubing on optical beam from the GRIN lens. A) schematic of the simulation, B) effect on focal length, C) effect on spot size, and D) demonstration of light travel through higher index material.
Y
X
A
B
C
D

96
Figure 4-20. Effects of FEP tubing on the system. A) effect on spot size, B) effect on focal length.
Effect of Non-Telecentric Scan
The last issue we consider is the non-telecentric scan effect of the probe. Since
the scanning mirror is placed after the GRIN lens, imaging plane is not flat. There are
two scan directions, longitudinal and radial; Figure 4-21 demonstrates the non-
telecentric scan effect in the longitudinal direction.
From basic geometrical optics, when the incident beam and the normal to the
reflection plane are in the same plane, reflection beam will be in the same plane; and
A
B

97
when the mirror rotates in plane, the angle change of the reflection beam will be twice of
the rotational angle of the reflection plane. In the longitudinal scan direction, when the
MEMS mirror scans linearly, the optical beam will also scan linearly at twice the angular
speed. According to the simulation, as long as the mirror plate is flat, the change in spot
size is very small at different scan angles. However, it does cause some deformation in
the OCT image. For each cross-sectional scan, a row of pixels shows information at the
same optical depth; as a result, a flat surface would be shown with a curvature in the
image, as shown in Figure 4-22. A simple algorithm could be carried out to improve the
visualization, which will be described in the following. For each A-line signal collected
during scanning, its offset from the center position was calculated and then entire A-line
was shifted accordingly to match up with the center position. Specifically, in the OCT
system, controlling signal for the MEMS mirror is outputted through a data acquisition
card (USB-1408FS, Measurement Computing). The output signal of 0-4 V was divided
into 112 steps and output over 0.4 s, 512 A-lines and 4096 points for each A-line were
collected during this time. To obtain the image in Figure 4-22, scanning range of ±12.5°
was measured at about 2 mm from the MEMS center, the entire imaging depth was 1.6
mm. Therefore, for the Kth A-line, the number of points need to be moved could be
calculated by equation (4-1). The initial result is shown in Figure 4-22 B. This algorithm
greatly simplified the problem by moving each A-line all together by the same amount, a
more accurate algorithm that takes into account the scanning angle is desirable for
more accurate display.
mmkmm 6.14096))512
1112
1112
255.12cos(1(2
(4-1)

98
Figure 4-21. Demonstration of the non-telecentric scan effect. A) imaging area during scan, B) imaging plane direction at a certain scan angle.
Figure 4-22. Correction for curved image display. A) 2D image of a flat IR card before correction, B) 2D image of the flat IR card image after correction.
The scan in the radial direction is a little more complicated. As shown in Figure 4-
23, for every different angle in radial direction, the input beam and the normal to the
mirror plate would form a different plane, and the law of reflection will take place in the
new plane. As a result, when the mirror scans in the radial direction, the reflected beam
would form a curved imaging plane. Using space geometry, the relationship between
the mirror scan angle β in the radial direction and the beam scan angle θ could be
calculated by equation )2
cosarccos(
. A non-linear relationship is suggested by this
equation. 3D reconstruction algorithm is needed in order to correct the distortion in this
direction and this will be a research focus in future studies.
A B
Imaging area
offset
A B

99
Figure 4-23. Non-telecentric scan effect in radial direction. A) with one scan angle, B) with multiple scan angles.
Summary
In this chapter, four generations of MEMS based endoscopic OCT probes were
introduced. The probe diameter reduced from 5 mm to 2.5 mm by the fourth generation.
During this process, the packaging schemes were simplified with the introduction of
flexible PCB and a novel mirror design that places the connecting pads on the bottom of
the mirror chip. Capabilities of the probes were demonstrated with in vivo imaging
experiments. Clear layered structures and tumor shape were visible from the OCT
images obtained with the packaged probes. At last, four factors that affect the
performance of the probes were studied. We could conclude that by precisely
controlling the distance between the fiber and the GRIN lens, an acceptable focusing
length range of larger than 3.5 mm could be obtained, with lateral spot size slightly
larger than 30 µm. The working distance and resolution were not significantly affected
by the 4th generation MEMS mirror, due to its large radius of curvature. FEP tubing
introduces slight astigmatism, when MEMS mirror is not perfectly flat. And the resolution
will not change much at different scan angles during imaging.
A B

100
CHAPTER 5 MEMS BASED FREE-SPACE TISSUE IMAGING — REFRACTIVE INDEX
MEASUREMENT
In this chapter, we explore another MEMS based OCT application in free space:
localized refractive index (RI) measurement. In this study, OCT is used to measure
group RIs in various anatomical regions in live rat brain tissue slices. The effects of
tissue deformation on RI changes are also measured in different anatomical regions. To
measure RI, OCT and an indenter tip are used to measure both the physical and optical
thicknesses of normal and compressed tissue slices, and cell viability for tissue slices is
maintained throughout the measurements. RI is determined by the ratio of physical
thickness and optical thickness of the brain tissue slices. The large aperture LSF-LVD
MEMS mirror was employed for transverse scan in order to minimize disturbance to the
test sample.
RI Measurement Background and Motivation
The refractive index (RI) of a sample measures how fast light travels in it. Even
with high resolution imaging modality, optical images of a biological tissue can still be
distorted by inaccurate data of the tissue’s RI, which may vary from region to region
even in the same tissue. Variation in RI between anatomical regions may be due to
heterogeneous tissue structures caused by differences in tissue constituents. Variation
in RI may also be introduced with compression or swelling of tissues, which can change
the ratio of solid and fluid fractions in tissue. Accurately measuring RI is essential to
provide high-fidelity optical images since RI is a key parameter for image reconstruction
and interpretation as well as for understanding light-tissue interactions. Besides, clinical
diagnosis can be made based on the refractive index difference between normal and
malignant tissues [142], [143].

101
In previous studies, numerical simulations based on photon absorption and
scattering models have been used to predict tissue RIs [143], [144]. These methods
involve complex algorithms and lengthy calculation times. Other attempts to
experimentally determine tissue RIs measure the output angle of an optical fiber with
the tissue as the fiber cladding [145], or measure the critical angle of total internal
reflection between the boundary of the tissue sample and a triangular prism [146] or
semi-cylindrical lens [147]. Using these experimental methods, the RIs of various
tissues including kidney, liver and striated muscles were obtained [145], [147].
Recently, more accurate methods for measuring RIs were proposed by Tearney et
al. based on OCT [148]. Two methods were introduced to measure RIs of dermis,
epidermis and stratum corneum in [148]: the first one used OCT images of a flat
substrate and tissue boundaries and extracted the RI by comparing the optical and
physical thickness; and the second method utilized focus tracking, in which the
movements of the reference and sample arms were recorded and the RI was calculated
based on the distances they moved. Binding et al. measured the RI of the cortex of the
rat brain as a function of age by employing a full-field OCT with a similar focus tracking
method [149]. Note that a broadband light source is typically used in OCT, so group RI
was measured in these methods. Another approach, which was applied to liver, spleen
and brain tissues, measured the phase change induced by tissue samples to calculate
RI [150]-[152]. This method, by using a HeNe laser as the light source, gives the phase
RIs of the samples. Group and phase RI are defined with respect to group and phase
velocity respectively, and they are slightly different in biological tissues due to the
chromatic dispersion.

102
While optical properties have been previously measured in central nervous system
(CNS) tissue, RIs for living tissues are scarce, and to our knowledge, regionally-varying
RIs in brain tissue have not been reported. Measurement of regionally varying RI is
important for heterogeneous tissues consisting of different types of cells and cellular
densities at each anatomic region. With these additional measures, distortion of optical
images between anatomical regions due to variation of RIs may be corrected in
complex tissues. Maintaining tissue viability is potentially important for measuring RI of
CNS tissues. Hypoxic neuronal injury due to a lack of transported oxygen and nutrients
increases cell membrane permeability, and cell membranes and matrix components will
also lose their structural integrity. These physical changes may have an effect on optical
properties of brain tissues. In addition, information on how RI changes with regards to
physical deformation may be used to characterize or potentially diagnose diseases
which are related to tissue deformation such as hydrocephalus and brain tumors [153]-
[155]. Besides, OCT-based elastography, which has been used for medical diagnosis
and mechanical testing may also benefit from this knowledge, since it is based on the
measurements of tissue deformation under loaded conditions [156], [157].
Free Space OCT System
The same time domain OCT system was employed for imaging the optical
thickness of brain tissue slices. The sample arm is set up in free space for this
application. In the sample arm, instead of using a translational stage to hold the sample
for lateral scans, the light weight large aperture LSF-LVD MEMS mirror introduced in
Chapter 3 was used (Figure 3-7). The output light from the single mode fiber (SMF-28)
was collimated with a fiber collimator (Thorlabs, F260FC-C); and the collimated beam
size was 2.8 mm in diameter. The light was then focused using a lens with diameter of

103
12.7 mm and focal length of 39 mm. A MEMS mirror was placed approximately 26 mm
behind the focusing lens, with 45° to the incoming beam. The beam diameter at the
mirror plate was about 0.94 mm, and the 45° cross section was about 1.33 mm in
diameter. The mirror plate is 3 mm × 3 mm, which is larger than twice the beam size
and did not truncate the incident beam even at the largest scan angle of the MEMS
mirror. The transverse resolution was ~23 µm.
Figure 5-1. OCT setup for refractive index measurement.
The advantage of using a MEMS mirror was that it allowed the sample to remain
stationary, and thus disturbance from a moving stage was avoided. For ex vivo testing,
the tissue slices were submerged in a physiological fluid, but were not fixed to the
underlying substrate. With stage movement, even small relative movement of the tissue
would cause image artifacts, and by employing a MEMS mirror, motion artifacts were
avoided.
Sample Preparation
Tissue samples from five adult male Sprague Dawley rats (~ 250 g) were tested.
Tissue slices from three rats were used to measure RIs within different anatomical
regions and tissue slices from two rats were used to measure RI changes with tissue

104
compression. Rat surgery was conducted in accordance with the NIH guidelines on the
use of animals in research and the regulations of the Animal Care and Use Committee
of the University of Florida. Prior to euthanasia, rats were fully anesthetized by
isoflurane inhalation and checked for absence of toe-pinch, righting, and corneal
reflexes. After euthanasia, standard protocols for tissue retrieval, brain tissue slicing,
and tissue maintenance were implemented. Excised rat brains were immediately sliced
using a vibratome (Leica VT 1000A, Leica Microsystems Inc., Germany) into coronal
sections of 300 µm thickness. This thickness was chosen to ensure transport of oxygen
and good visibility through the sample thickness in OCT images [159]. After slicing,
brain tissues were submerged in O2-saturated artificial cerebrospinal fluid (aCSF,
Neurobasal™ Media, GIBCO, Invitrogen Co., CA) and temperature was maintained
between approximately 35 - 37 °C. The aCSF was continuously bubbled with 95% O2
and 5% CO2 gases and 0.5 mM L-Glutamine (Invitrogen Co., CA) and 1% penicillin-
streptomycin (Invitrogen Co., CA) were supplemented. The pH of the aCSF measured
before testing was 7.4. Through testing, sliced brain tissues were maintained under
these conditions; cell viability was determined by measuring neuronal death or
degeneration as a function of incubation time with Fluor-Jade C (FJC) staining. The
results have shown that cells in the slices could maintain viability for up to 7 hrs [157].
Method and Process
To establish regional variation of RI in acute rat brain tissue slices, cerebral cortex,
putamen, hippocampus, thalamus and corpus callosum were tested (Figure 5-2). The RI
of a tissue slice is calculated by dividing optical thickness by its physical thickness, i.e.
physical
optical
t
tRI
(5-1)

105
Thicknesses were measured using the following procedure. To measure RI, an
acute rat tissue slice was placed into a Petri dish which was filled with oxygenated
aCSF (aCSF was oxygenated with 95% O2 and 5% CO2 for an hour prior to testing). A 2
mm spherical bead attached to a micro-positioner was lowered onto the slice to touch
the surface of selected anatomical regions, see Figure 5-3 A. The spherical ball was
aligned within the center of the lateral scan range of the MEMS mirror and OCT was
used to scan cross-sectional tissue images from the bottom of the Petri dish which was
made of glass. The optical thickness of the tissue slice was obtained by directly
measuring the thickness of the slice in the OCT image through the number of pixels
(see Figure 5-3 B). After the optical thickness was measured, the brain tissue slice was
removed gently without moving the metal bead, and the aCSF in the Petri dish was
removed using a pipette and paper tissue. The physical thickness of the brain tissue
slice was determined using the thickness of the air gap between the metal bead and the
bottom of the Petri dish. The RI of air is 1. The RI was calculated by comparing the pixel
numbers of the tissue slice thickness and the air gap. To verify accuracy, a known
optical path length of 500 µm was measured to be between 496 to 498 µm using this
setup, so the system error was smaller than 0.8%. Ten tissue slices from each region
were measured; one test was conducted on each slice.
Figure 5-2. Anatomical regions of rat brain tissue slices tested. Medial sections from excised rat brains were sliced into coronal sections of 300 µm thickness.

106
To measure the refractive index of tissues under compressed states, the spherical
bead was replaced by a 2 × 2 × 0.2 mm flat glass tip to apply uniformly compressive
strains. Brain slices from 2 rats were used for this study, 7 slices for cerebral cortex and
8 slices for corpus callosum were tested. The same area in each slice underwent strains
from 20% to 80% during a single series of tests. The initial physical distance between
the bottom and top surface of brain tissue was measured using a micrometer stage, and
then tissue was deformed by moving the flat indenter. Brain tissue slices were
continuously compressed by 20%, 40%, 60% and 80% with respect to the initial
physical thickness. Cross-sectional deformed images were taken by OCT and the
physical thickness and optical thickness were compared to measure changes of RI with
respect to tissue compression. The experimental procedure took less than 2 minutes for
each series of tests. OCT images for these experiments are shown in Figure 5-5.
Figure 5-3. Measurement process. A) Demonstration of positioning the metal bead during the experiment, B) OCT image of the brain tissue slice, and C) OCT image of air after brain tissue is removed.
A
B
C
tissue thickness
air thickness

107
Figure 5-4. Measurement of optical and physical thickness of various anatomical regions in rat brain tissue slices. A1-E1) meansurement of the optical thicknesses (toptical) of each target region, and A2-E2) measurement of the physical thicknesses (tphysical).
A1 A2
B1 B2
C1 C2
D1 D2
E1 E2

108
Figure 5-5. OCT images of brain tissue slices under compression for A) cerebral cortex (grey matter) and B) corpus callosum (white matter, bundle of myelinated axons). A1, B1) no compression, A2, B2) 20%, A3, B3) 40%, A4, B4) 60%, and A5, B5) 80% compression.
Results
OCT provided 2D cross-sectional images of acute rat brain tissue slices, shown in
Figure 5-4 and Figure 5-5. The bottom and top surfaces of the tissue slices were clearly
delineated. The surface contact of the 2 mm-diameter stainless steel bead was also
detected for each anatomical region. The RI in the corpus callosum, which is a known
white matter region, was 1.407 ± 0.015 and the RIs in the putamen and cortex, which
are known as grey matter regions, were averaged between 1.361 and 1.369. RI in the
corpus callosum was measured to be statistically higher than those in other regions of
brain tissue (see Figure 5-6). The corpus callosum was the only region found to be
statistically different from other anatomical regions based on the Tukey-Kramer method
with alpha=0.05. The standard deviation of the RI in each region ranged from 0.007 to
0.016. The RI of the aCSF was 1.342 ± 0.007. This was ~2.7% lower than the average
RI over all the regions measured in the brain tissue slices, which was 1.380.
A1 200µm
A2 A3 A4
B1
A5
B2 B3 B4 B5

109
Figure 5-6. Measured RI in various anatomical regions in brain and aCSF. 10 samples were measured at each region. Bars correspond to 1SE (CC=corpus callosum, Thal=thalamus, Hip=hippocampus, CCt=cerebral cortex, Put=putamen, and aCSF=artificial cerebral spinal fluid). RI of corpus callosum was statistically different compared to other regions.
The effect of tissue deformation on RI was estimated in the cerebral cortex and
corpus callosum by unconfined uniform compression. The RI changes in both regions
showed a similar trend, non-linear increases with increasing compressive strain, as
shown in Figure 5-7. The RI of the white matter increased more significantly under the
same strain compared to the RI of the grey matter. For strains up to 20%, only small
increases in RI were observed, which were ~3% for the grey matter and 6% for the
white matter. For applied strains over 40%, RI significantly increased. For 80% strain, a
RI increase of more than 70% was measured for the grey matter, while an average 90%
increase was measured for the white matter.

110
Figure 5-7. RI in rat brain tissue slices under uniform compression. 7 rat brain tissue slices were test for cerebral cortex and 8 tissue slices were tested for corpus callosum measurements. Bars correspond to ±1SE.
Discussion and Conclusion
In this study, RI of rat brain tissue slices was measured in various anatomical
regions using a MEMS based OCT system. OCT images clearly captured cross
sectional images of brain tissue slices with white matter (corpus callosum and thalamus)
showing brighter intensity than gray matter regions such as the cerebral cortex and
putamen. RI of the corpus callosum, which consists primarily of white matter was
measured to be 1.407±0.015. No statistical differences in RIs of grey matter regions
(cerebral cortex and putamen) were found, and the average RI of all grey matter regions
was 1.369±0.014. RI of aCSF was slightly higher than RI of water by approximately
0.9%. The difference between RIs at each anatomical region may be due to different
types of cells, cell densities, and differences in fractions of extra/intracellular space in
their structures. The higher RI measured from the white matter may also be due to
multiple scattering. RIs of both white and grey matter regions were close to RI of water,

111
because of the large water content of brain tissue [160]. RIs of brain tissue slices
measured by OCT in this study are comparable to those previously reported in
literature, for example, 1.3526 for cortex at a 1.1 µm wavelength [149], 1.371 over a
range of spatial frequency of 0.06 to 0.6 µm-1 (region not specified) [150]; and 1.3751
and 1.3847 for two cortical neuron cell bodies at 658nm [151]. Differences between
measures may be due to different measuring wavelengths. Another reason could be
due to maintenance of tissue viability. Tissue viability may be important in measures of
optical properties in brain tissue since it can change with the fraction of solid to fluid
constituents, e.g. extracellular fluid content. However, our measured RIs may be similar
to other studies since ~ 80% of brain tissue is fluid, and changes in solid to fluid volume
fractions with changes in tissue viability may not be significant as long as structural
integrity of the ECM and cell membranes is maintained (short time after slicing).
Changes of RIs under unconfined compression testing of brain tissue slices were
also measured in both white (corpus callosum) and grey matter (cerebral cortex)
regions. Non-linear increasing trends with increases in strain were observed for RIs of
both regions. Under smaller compression strains under 20%, changes of RI were almost
negligible. RIs increased significantly over 40% compression. This large increase may
be due to changes in water content and significant compaction of solid matrix in the
tissue with large strains as fluid is squeezed out of the extracellular space. As
compression approached 80%, most extracellular fluid was likely squeezed out and RI
which was significantly higher than for non-compressed states likely reflected that of the
solid constituents including cells, vessel walls, and ECM. The higher scattering of solid

112
constituents compared to fluids can therefore be used to explain the gradual increase in
OCT image intensity with the increased compression shown in Figure 5-5.
In measurement of RIs, tissue swelling can be a significant issue when comparing
acute slices to tissues in vivo. Thicknesses of brain tissue slices were measured within
2 hours after tissue slicing. Average thicknesses of the cerebral cortex and corpus
callosum were 341 µm (1SE=14 µm) and 254 µm (1SE=22 µm), respectively. Thus an
approximately 13% thickness increase in the cerebral cortex and a 20% thickness
decrease in corpus callosum were detected after tissue slicing. This may in part be due
to effects of residual stresses within brain tissues. For example, within the brain, certain
grey matter regions have been measured to be in compression while white matter was
measured to be in tension [161]. After slicing, these stresses may be removed resulting
in thickness changes. However, these changes in the thickness may not have a
significant effect on RI, since changes of RI under 20% of compression were estimated
to be less than 3%. This suggests that RI measurements in vivo and ex vivo could be
comparable.
It should be noted that blood flow was not taken into account for this study, and
the temperature of brain tissue samples may have changed slightly during the testing
process since the sample arm was not heated. These two factors may introduce some
differences when comparing the testing results to in vivo conditions. In large strain tests,
viability of cells may be compromised as tissue is compressed. Within the region of the
flat glass tip, the extracellular space may be greatly reduced, resulting in hindered
extracellular transport and hypoxic cell damage. To reduce this effect, all test
procedures were completed in less than 2 min within each test region. Cell viability may

113
not be significantly compromised during this short period of time. Cells may also be
damaged due to loading under large compression (over 40 to 80% of compression).
With rupture or damage to the cell membrane, cellular components are released and
these constituents may cause further tissue damage. Also due to the small scan angle
of the MEMS mirror, the non-telecentric scan effects were not corrected within the OCT
images. The precision of RI measurements can be increased with improved resolution
of the OCT system and correction of the non-telecentric scan effects.
The free space OCT system combined with indentation technique is simple to
implement, it takes advantage of the high resolution of OCT and the region selection
capability of indentation. The results of this study may be helpful in correcting optical
image distortion caused by regionally varying RI and tissue compression caused by
injury, surgery or disease. Accurate optical images of brain tissue could aid in image
interpretation and may lead to improved diagnosis and more successful imaging-guided
surgery. In addition, OCT-based mechanical testing of tissues under compression or
indentation tests may also benefit from this study.

114
CHAPTER 6 MEMS FUNCTIONAL OCT IMAGING (PS, DOPPLER)
In this chapter, implementation of functional OCT, including PS OCT and Doppler
OCT will be introduced. The goal of this study is to explore the potential of our existing
time domain OCT system, to improve the image contrast for special tissues, such as the
ones with birefringent properties, and blood vessels. To realize PS OCT, several optical
components need to be added to the existing OCT configuration. While the major
difference for implementing Doppler OCT from the basic system is signal processing
algorithm. In this study, ex vivo PS OCT animal imaging using MEMS probe has been
realized; while Doppler OCT imaging results are obtained by using translational stage
for lateral scans.
PS OCT System
PS OCT System Configuration
In order to add polarization sensitive functionality to the existing system, several
optical components are added to the system. These components are one polarizer, one
polarization modulator, three sets of polarization controllers, two polarization beam
splitters and another heterodyne photodetector. The complete PS OCT system is
demonstrated in Figure 6-1. Stokes vectors are employed to represent the birefringent
properties of the sample. Using Stokes vectors to describe light polarization is an
alternative way to Jones matrix. For a polarization beam
y
x
i
y
i
x
eE
eE
, its Stokes vectors are
defined as

115
I Ex2 Ey
2
Q Ex2 Ey
2
U 2ExEy cos( x y )
V 2ExEy sin( x y )
(6-1)
2222 VUQI (6-2)
Three of the four parameters are independent, and could be used to derive the
fourth one. The results of the PS OCT system are two sets of Stokes vectors images,
with linearly polarized input light and circularly polarized input light.
Figure 6-1. Schematic of PS OCT system.P: polarizer; OC: optical circulator; PC: polarization controller; BS: 2 x 2 beam splitter; RSOD: rapid scanning optical delay line; PBS: polarization beam splitter; DA and DB: balanced photodetectors.
Infrared light coming from the light source goes through a polarizer first, in order to
obtain linearly polarized light. A polarization modulator is right after it. The polarization
axis of the modulator has a 45° angle to the polarization axis of the input light. When no
voltage is applied on the modulator, input light is not modulated; linearly polarized light
goes through the system. When a voltage is applied to the modulator, a phase shift

116
can be induced, and polarization state will change from linear to circular. The
interference signals from these two polarization states are used to calculate the Stokes
vectors. The polarization controllers in the system are used for tuning so that the
reference signal detected by D1, D2 and D3, D4 are equal. Jones matrix can be used to
represent the polarization states at each stage, when linear polarization is used. The
input light is
00
00
E
E, the reference signal reaches PBS1 can be written as
0
0
2
10
~
~
E
eE
E
E i
r
r
, and the reference signal at PBS2 can be written as
i
i
r
r
eE
eE
E
E
0
0
4
30
~
~
; similarly, the sample signal at PBS1 is
2
1
2
1
2
1
~
~
i
i
s
s
eE
eE
E
E, and the
sample signal at PBS2 is
)(
2
1
4
3
2
1
~
~
i
i
s
s
eE
eE
E
E. The reference and sample signals with the
same polarization orientation will interfere with each other, signals reach the
photodetectors from D1, D2, D3 and D4 are shown in equation (6-3) and equation (6-4),
and then heterodyne detection occur at DA and DB, the DC signal is cancelled at this
point, and the detected signals are shown in equation (6-5).
)cos(2
)cos(2
220
2
2
2
02
0110
2
1
2
01
kzEEEED
kzEEEED
(6-3)
)cos(2
)cos(2
220
2
2
2
04
0110
2
1
2
03
kzEEEED
kzEEEED (6-4)
)cos(4
)cos(4
22042
011031
kzEEDDD
kzEEDDD
B
A
(6-5)

117
Signal processing using Hilbert transform gives the complex signal as shown
below.
)](exp[4~
)](exp[4~
220
0110
kziEED
kziEED
B
A
(6-6)
With these results, a set of stokes parameters of linearly polarization can be
obtained using the following equation.
)sin(16]~~
Im[2
)cos(16]~~
Re[2
)(16~~~~
)(16~~~~
20121
2
0
*
20121
2
0
*
2
2
2
1
2
0
**
2
2
2
1
2
0
**
EEEDDV
EEEDDU
EEEDDDDQ
EEEDDDDI
BA
BA
BBAA
BBAA
(6-7)
During the next time period, voltage is applied on the polarization modulator to
induce circular polarization. A prime is used to distinguish circular polarization from
linear polarization. The input circularly polarized light can be represented by
00
200
E
eEi
.
Similar to the linear case, the reference light reaches PBS1 is
0
2
0
2
10
~
~
E
eE
E
E i
r
r
, and the
reference light at PBS2 is
i
i
r
r
eE
eE
E
E
0
2
0
4
30
~
~. The sample signals at PBS1 and PBS2 are
2
1
2
1
2
1
~
~
i
i
s
s
eE
eE
E
E and
2
1
2
1
4
3
~
~
i
i
s
s
eE
eE
E
E. Again, the same polarization orientation will
interfere with each other, and the interference signals are
)cos(2
)2
cos(2
220
2
2
2
02
0110
2
1
2
01
kzEEEED
kzEEEED
(6-8)

118
)cos(2
)2
cos(2
220
2
2
2
04
0110
2
1
2
03
kzEEEED
kzEEEED
(6-9)
The detected signals from circularly polarized input light are
)cos(4
)2
cos(4
22042
011031
kzEEDDD
kzEEDDD
B
A
(6-10)
The complex signal after Hilbert transform can be express as
)](exp[4~
)]2
(exp[4~
220
0110
kziEED
kziEED
B
A
(6-11)
The signal Stokes vectors with circular polarization input light can be calculated by
the following equation.
)2
sin(16]~~
Im[2
)2
cos(16]~~
Re[2
)(16~~~~
)(16~~~~
20121
2
0
*
20121
2
0
*
2
2
2
1
2
0
**
2
2
2
1
2
0
**
EEEDDV
EEEDDU
EEEDDDDQ
EEEDDDDI
BA
BA
BBAA
BBAA
(6-12)
When both the linearly polarized signal and the circularly polarized signal are
collected, two sets of Stokes vectors, 8 images in total are displayed on the computer
screen. With 4 images in the first row representing the Stokes parameters: I, Q, U, V
obtained with linearly polarized light, and another 4 images in the second row
representing those obtained with circularly polarized light.
Ex Vivo PS OCT Imaging Experiment
Ex vivo 2D and 3D PS OCT imaging of canine meniscus have been performed to
show the capability of the system. During the imaging session, a canine knee joint was

119
cut open (Figure 6-2) to expose the menisci. The 2nd generation OCT probe was
employed for this experiment. It was positioned at different locations of the menisci for
imaging.
Figure 6-2. PS OCT imaging of canine meniscus.
Figure 6-3. PS OCT imaging results. A) Stokes parameters of linear and circular polarization, B) 3D reconstruction of intensity image, and C) 3D reconstruction of parameter Q.
A
B
C
I Q U V

120
A lateral scanning area of 2.3 × 2.3 mm2 was obtained by driving two opposite
pairs of the actuators with two sets of voltages, i.e., 0~4 V for the circumferential
direction scanning and 0.5~3.5 V for the longitudinal direction scanning. Figure 6-3
shows 2D and 3D PS OCT images of the canine meniscus. The 2D Stokes parameter
images, corresponding to I, Q, U and V, respectively, are shown in Figure 6-3 A, where
each row represents one of the two polarization states. Figure 6-3 B shows the 3D OCT
reconstructed from the intensity parameter I, and Figure 6-3 C shows the 3D
reconstruction from parameter Q. The two shadowed areas in Figure 6-3 A are artifacts
due to two blots on the FEP tubing.
Doppler OCT System
Doppler OCT Principle
To realize Doppler OCT, no hardware modification is required for the original time
domain OCT system. Only an additional signal processing step to obtain Doppler
information is required. In our Doppler OCT system, phase resolved signal processing
method is adopted. The principle of this algorithm has been discussed in the section
Functional OCT: Doppler OCT. Doppler frequency could be calculated from the
equation: Tf KKD /1 . Hilbert transform is used to obtain the phase information
, once signal )(t is collected by the data acquisition card. During signal processing,
Hilbert transform is realized by fast Fourier transform (FFT). It could be done according
to the following procedure:
)(~
)()( 1 tFFTlterBandPassFiHFFTt
In this method, Hilbert transform is realized in the frequency domain. First, a
Fourier transform is conducted, and then the signal is multiplied with the function

121
01
00
H
. A band pass filter is added to reduce noise. Finally, an inverse Fourier
transform provides the complex signal with its phase information. Each four A-lines
were used for averaging in image display.
In Vivo Doppler OCT Imaging Experiment
In vivo experiments on imaging mouse blood vessels were conducted in our lab.
Transverse scans were realized by transverse scanning PI stage. The sample was a
female athymic (nu/nu) nude mouse with a body weight of 20 g to 26 g (Harlan
Laboratories, Indianapolis, IN). The mouse was anesthetized by injecting ketamine (100
mg/kg) and xylazine (10 mg/kg) intraperitoneally, shown in Figure 6-4 A. Imaging results
of Doppler OCT were shown in Figure 6-4 B and C; image depth is 1.6 mm and image
width is 2.3 mm. From the comparison between the intensity image and the Doppler
image, we can see that the contrast of blood vessel from the Doppler image has been
greatly improved.
Figure 6-4. In vivo Doppler imaging. A) sample mouse during imaging session, B) intensity image through the window chamber, and C) Doppler image through the window chamber.
Blood Vessels
A C
B

122
Summary
In this chapter, detailed implementations of PS OCT and Doppler OCT at the BML
were introduced. PS OCT was successfully demonstrated with the 2nd generation
MEMS probe. 2D and 3D OCT images of canine meniscus were presented. Improved
contrast of Doppler OCT for rat blood vessels was also successfully demonstrated.

123
CHAPTER 7 MEMS OCT/PHOTOACOUSTIC IMAGING
So far we have discussed OCT’s ability for high resolution endoscopic imaging.
For highly scattering tissues, the penetration depth of OCT could be limited. It is
therefore desirable to use another imaging modality with higher penetration depth to
work with OCT as an extension for deeper tissue imaging. Photoacoustic (PA) imaging
is a suitable candidate for this role. PA imaging is a combination of optical imaging and
ultrasound imaging. It can normally reach 3 – 5 mm deep in tissue, with about 100 µm
resolution. With the help of PA imaging, deeper tissue structures that are not visible with
OCT could be seen, and it could help to make the decision of whether more tests need
to be conducted for deeper tissues. In this chapter, we introduce a prototype
endoscopic probe that could be used for both OCT and PA imaging. In the following
sections, first the background and principle of PA imaging will be introduced. Then the
photoacoustic imaging system employed in this study will be presented, both ex vivo
and in vivo experimental results will be shown to demonstrate the system capability.
And the OCT/PA imaging probe will be introduced at last.
Photoacoustic Imaging System
Principle and Background
PA imaging is based on the PA effect, which describes the generation of acoustic
waves by the incidence of optical energy. In the case of PA imaging, when laser output
is incident on to the tissue, the absorption of the optical energy causes the tissue to
have thermal expansion, and subsequently, emitting broadband ultrasonic waves. The
time of flight, amplitude etc. of the ultrasonic waves provide information regarding

124
location, strength and dimension of the acoustic source, therefore tissue reconstruction
can be realized by detecting the ultrasound signals[162]-[165].
PA imaging combines high optical absorption contrast and high ultrasonic spatial
resolution, and therefore has received a lot of attention recently. Researchers have
demonstrated PA imaging applications in breast cancer, brain vasculature, skin disorder
and arthritis, etc. [164]-[171]. For endoscopic photoacoustic imaging, methods such as
using a geared micromotor to scan a single transducer and using a galvanometer for
lateral scan have been proposed. However, using micromotor can only realize 2D side-
view scan unless an external linear stage is used; and using galvanometer limits the
further miniaturization of the probe due to its relatively large size. Therefore, MEMS
mirror become the ideal choice for this task.
MEMS Based Photoacoustic Probe
An endoscopic probe based on the 3rd generation LSF-LVD MEMS mirror is
designed and assembled for photoacoustic imaging. This is a front view design, as
shown in Figure 7-1. The inner diameter of the probe is 9.5 mm and the outer diameter
is 11.5 mm. A ring-shaped polyvinylidene fluoride (PVDF) transducer is attached to the
edge of the probe; it is a one-element ultrasound detector, which is fabricated with a
110 μm-thick Ag ink printed PVDF film (Measurement Specialties Inc.) as the sensing
unit. Flexible PCB of the same shape is attached to it as positive and negative electrode
connectors and backing materials. The central frequency of this detector is 2.5 MHz.
When light comes in, it first incidents on a fixed mirror, then the light is reflected to the
MEMS mirrors for transverse scans. Ultrasound signal generated from the tissue due to
thermal expansion is detected by the PVDF transducer. During scanning, the four
actuators are driven by 0 ~ 4 V differential ramp voltages and optical scan angles of ±

125
31° could be achieved. When the imaging surface is place 9 mm away from the MEMS
mirror, scanning area of up to 9 × 9 mm2 could be obtained. The scanning beam size is
1 × 1 mm2, determined by the MEMS mirror aperture size.
Figure 7-1. Endoscopic photoacoustic probe. A) schematic of probe, B) 3D model, and C) assembled probe.
Photoacoustic System
The endoscopic photoacoustic system employed in this study is demonstrated in
Figure 7-2. The laser employed was a Nd:YAG 532 nm laser (NL 303HT from EKSPLA,
Lithuania); it generated pulses of 20 ns duration at 10 Hz. Two function generators
(AFG3022B, Tektronics) were used to generate synchronization signals for the data
acquisition and driving signal for MEMS mirror. The ultrasound signal was first amplified
by a pre-amplifier with a gain of 17 dB and then further amplified by an amplifier with a
controllable gain from 5 dB to 20 dB. Sampling rate of the data acquisition card was 50
MHz; and a band-pass filter (Panametrics, Waltham, Massachusetts) from 1 MHz to 5
MHz was used to pass the signal and reduce noises.
B
MEMS mirror
Fixed mirror
Glass cover
PCB
Transducer
MEMS mirror
Tissue A C

126
Figure 7-2. Photoacoustic system.
Photoacoustic Experiments
A series of ex vivo and in vivo experiments were conducted in the Biomedical
Optics Laboratory (directed by Dr. Huabei Jiang) to demonstrate the system capability.
In these experiments, the incident laser beam was 1 mm × 1 mm in size, and the
incident power on the sample was 15 mJ/cm2, which is below the American National
Standards Institute safety limit of 20 mJ/cm2. For 2D images, 50 points of signal were
obtained in each direction; the scanning frequency for fast scan was 100 mHz, and for
slow scan, it was 2 mHz. The scanning time was limited to 250 s, due to the 10 Hz
repetition rate of the laser. During the experiments, ultrasound gel was applied between
the probe and the sample to minimize ultrasound attenuation.
To demonstrate the system 3D capability, an experiment was conducted with a
pencil lead (0.7 mm in diameter) embedded inside a piece of chicken at 1.5 mm
underneath the surface. Figure 7-3 shows the imaging results, which accurately

127
reflected the embedded pencil lead; the reconstructed pencil diameter was ~ 0.72 mm.
In vivo experiment was also conducted, shown in Figure 7-4. The reconstructed 3D
image clearly reflected the size and shape of the blood vessel labeled in the picture.
Figure 7-3. Ex vivo photoacoustic experiment with pencil lead embedded in a piece of chicken. A) photograph of the imaging target, B)-D) coronal, sagittal and cross-section views of the recovered 3D image, and E) 3D rendering of the recovered image.
Figure 7-4. In vivo photoacoustic experiment. A) imaging target, B) reconstructed blood vessel image.
MEMS Probe for Both OCT and Photoacoustic Imaging
MEMS Probe Design
A side-view endoscopic probe was designed for this study. Components for two
imaging modalities were combined into one design, including single mode fiber for OCT
imaging, multi mode fiber and transducer for PA imaging, and GRIN lens and MEMS
mirror for both uses. The two fibers were bundled together and connected to the GRIN
lens inside the probe; and outside, they were connected to the OCT system and the PA
A
B
C
D
E
A B
reconstructed blood vessel

128
system separately. For OCT imaging, this probe works in a similar way as the
previously reported side-view probes, the back-scattered optical signal is collected
through the GRIN lens back into the single mode fiber; for PA imaging, ultrasound
signal is detected by the transducer around the fibers. The MEMS mirror employed for
this probe is the 4th generation MEMS mirror; because for PA imaging, some ultrasound
gel is needed to prevent signal attenuation, and the MEMS mirror should be protected
from the gel. The 4th generation MEMS mirror has its mirror plate hidden under the
frame, and can be easily protected by a covering glass slide.
Figure 7-5. Probe for OCT and PA imaging. A) schematic of the probe, B) pictures of the assembled probe.
The diameter of the probe is about 7 mm. And the designed working distance from
the MEMS mirror to the imaging sample is ~ 3.5 mm. With the MEMS mirror scanning
±15° optical angle, the imaging area is about 1.8 mm × 1.8 mm. Due to the assembly
variation, the working distance for the assembled probe is only about 2 mm. And the
images obtained with this probe are about 1mm × 1mm.
Ex Vivo Experiment
The assembled probe was employed in ex vivo experiments to demonstrate its
capability for both OCT and PA imaging. The same procedures as that described in
A
B
MEMS mirror
transducer
GRIN lens
GRIN lens
transducer

129
Chapter 4 for the 4th generation probe was adopted for this experiment as the same
type of MEMS mirror was employed. From Figure 7-6, layered structure could be clearly
seen in the 2D image. The image looks stretched due to the smaller imaging range. The
PA imaging experiments are on-going at the Biomedical Optics Laboratory, and results
will be updated in future publications.
Figure 7-6. OCT images of mouse ear. A) 2D OCT image of mouse ear, B) 3D OCT image of mouse ear. (E: epidermis, D: dermis, cc: conjunction cartilage, C: cartilage).
Summary
This chapter introduced the concept of combining OCT and PA imaging with one
endoscopic probe. First, PA imaging using MEMS scanner was successfully
demonstrated. And then, a side view endoscopic probe that has the ability for both OCT
and PA imaging was introduced. 2D and 3D OCT images of a mouse ear were obtained
with the prototype MEMS probe.
A
E
D
D E
cc
cc C
200 µm
B

130
CHAPTER 8 CONCLUSION
The major goal of this study is to explore the applications of OCT system
combined with MEMS technology in the areas of endoscopic imaging and refractive
index measurement. This chapter highlights the research accomplishments and outlines
the recommended future work.
Summary of Work
Firstly, four generations of electrothermally based MEMS probes have been
developed. The probe size has been reduced from 5 mm to 2.5 mm in diameter. And
the packaging scheme has been simplified over time. Wire-bonding process has been
eliminated for the 4th generation probe, and electrical and mechanical connections have
been made easy with a flip-chip bonding mirror design. The optical performance of the
probes has been analyzed in detail. And the capabilities of the miniature probes for
endoscopic imaging have been successfully demonstrated with in vivo imaging
experiments; layered structures from sample tissues were observed, and tumor regions
were clearly separated from healthy tissue structures.
Secondly, MEMS mirror based free space OCT for refractive index (RI)
measurement in brain tissue slices has been demonstrated. RIs of both white matter
and gray matter were measured under free-loading and compressed status. This work
provides information that can be used to correct distorted optical images caused by
tissue heterogeneity or compression from surgery or certain diseases. Information on RI
change under compression can also help the mechanical property tests of soft tissues
based on elastography.

131
Thirdly, two types of functional OCT were demonstrated. They are polarization
sensitive OCT and Doppler OCT. The implementations of these two types of OCT
systems help improved the image contrast. PS OCT is especially useful for birefringent
tissues, while Doppler OCT helps to detect blood vessels with a higher contrast.
Lastly, OCT was combined with PA imaging to integrate two types of imaging
modalities in one probe. By combining two imaging modalities, we can take advantage
of the high resolution of OCT imaging, and the good imaging depth of PA imaging. The
successful implementations of ex vivo imaging experiments demonstrated the feasibility
of this idea.
Future Work
The successful demonstration of endoscopic OCT imaging using eletrothermally
actuated MEMS mirror opens up new opportunities for early cancer detection and
imaging guided surgery. Despite the achievements of this work, for MEMS OCT probes
to be widely used clinically, more work needs to done.
Firstly, more robust assembly procedures are needed to improve the consistency
in imaging qualities. The current assembly process is susceptible to manual variations.
For example, by using a fiber-GRIN lens module instead of two separate components
would help reduce the effect of focal length change due to the changing distance
between the two components.
Secondly, a different probe housing configuration needs to be developed to reduce
astigmatism introduced by the cylindrical shaped tubing. Using flat tubing and adding
astigmatism correction lenses are two potential resolutions that could be explored.

132
Thirdly, an imaging rendering algorithm that takes into account the non-telecentric
scan effect and non-linearity of the MEMS scan should be developed to reflect the real
size and shape of the sample being imaged.
Fourthly, a front view imaging probe should be developed for the PS OCT
research. A side view probe was used to image canine meniscus ex vivo in this study. A
front view probe is more suitable for imaging the meniscus in live animals.
Fifthly, in the refractive index measurement study, only coronally sectioned brain
tissue slices were measured. Since brain tissues have variously aligned micro-
structures, the effect of the directionality of brain tissue slices on RI and RI changes in
response to compression should be studied in the future.
Lastly, the first prototype probe for OCT and PA imaging has a relatively large
diameter. For clinical use, new designs with smaller sizes are desirable.

133
APPENDIX PUBLICATIONS
The following is a list of archival journal and conference publications generated
from the accomplished research effort.
Journal papers:
1. J. Sun, S. J. Lee, L. Wu, M. Sarntinoranont, and H. Xie, "Refractive index measurement of acute rat brain tissue slices using optical coherence tomography," Opt. Express 20, 1084-1095 (2012)
2. J. Sun, and H. Xie, "MEMS-based endoscopic optical coherence tomography", Int. J. Opt. 2011, 825629, (2011).
3. J. Sun, S. Guo, L. Wu, L. Liu, S. Choe, B. Sorg, and H. Xie, "3D in vivo optical coherence tomography based on a low-voltage, large-scan-range 2D MEMS mirror," Opt. Express 18, 12065-12075 (2010).
4. S. J. Lee, J. Sun, J. Flint, S. Guo, H. Xie, M. King, and M. Sarntinoranont, "Optically based-indentation technique for acute rat brain tissue slices and thin biomaterials", J. Biomed. Mater. Res. B, 97(1), (2011).
5. L. Xi, J. Sun, Y. Zhu, L. Wu, H. Xie, and H. Jiang, "Photoacoustic imaging based on MEMS mirror scanning," Biomed. Opt. Express 1, 1278-1283 (2010).
6. L. Liu, L. Wu, J. Sun, E. Lin and H. Xie, "Miniature endoscopic optical coherence tomography probe employing a two-axis microelectromechanical scanning mirror with through-silicon vias", J. Biomed. Opt. 16, 026006 (Feb 01, 2011).
Conference papers and abstracts:
1. J. Sun, C. Duan, S. Salmuelson, and H. Xie, “Design and Characterization of MEMS Based Optical Coherence Tomography Endoscopic Probe”, to be presented at Biomedical optics (BIOMED 2012), Miami, FL, April 28-May 2, 2012.
2. J. Sun, S. Guo, L. Wu, Choe, B. Sorg and H. Xie, "In vivo 3D and Doppler OCT imaging using electrothermal MEMS scanning mirrors", Proc. SPIE 7594, 759405 (2010).
3. J. Sun, S. Lee, M. Sarntinoranont, and H. Xie, "In vitro refractive index measurement of acute rat brains using optical coherence tomography", presented at the 2010 Biomedical Engineering Society Annual Meeting, Austin, TX, 6-9, Oct. 2010.
4. J. Sun, L. Wu, and H. Xie, "In vivo 3D and Doppler OCT imaging using electrothermal MEMS scanning mirrors", Proc. SPIE 7594, 759405 (2010).

134
5. S. Guo, J. Sun, A. Pozzi, H. Ling, L. Wu, L. Liu, and H. Xie, "3D polarization-sensitive optical coherence tomography of canine meniscus based on a 2D high-fill-factor microelectromechanical Mirror," Engineering in Medicine and Biology Society, 2009. (EMBC 2009. Annual International Conference of the IEEE, 3-6 Sept. 2009), pp.1445-1448.
6. S. J. Lee, J. Sun, M. King, H. Xie, and M. Sarntinoranont, "Viscoelastic property changes of acute rat brain tissue slices as a function of cell viability", presented at ASME 2011 Summer Bioengineering Conference (SBC2011), Famington, Pennsylvania, USA, 22-25 June, 2011.
7. S. Lee, J. Sun, H. Xie, and M. Sarntinoranont, "An optically-based indentation technique for thin soft biomaterials", presented at 2009 Biomedical Engineering Society Annual Fall Meeting, Pittsburgh, PA, 2009.
8. S. Guo, L. Wu, J. Sun, L. Liu, and H. Xie, "Three-dimensional optical coherence tomography based on a high-fill-factor microelectromechanical mirror”, in Novel Techniques in Microscopy, OSA Technical Digest (CD) (Optical Society of America, 2009), paper NTuB3.
9. L. Wu, S. Samuelson, J. Sun, K. Jia, W. Lau, S. Choe, B. Sorg, and H. Xie, “A 2.8mm imaging probe based on a high-fill-factor MEMS mirror and wire-bonding-free packaging for endoscopic optical coherence tomography”, Micro Electro Mechanical Systems (MEMS), 2011 IEEE 24th International Conference on (Cancun, Mexico, 23-27 Jan. 2011), pp.33-36.
10. D. Wang, L. Fu, J. Sun, H. Jia, and H. Xie, "Design optimization and implementation of a miniature optical coherence tomography probe based on a MEMS mirror", Proc. SPIE 8191, 81910M (2011).
11. W. Liao, W. Liu, L. Xi, J. Sun, Y. Zhu, L. Wu, H. Jiang, and H. Xie, "Miniature photoacoustic imaging probe using MEMS scanning micromirror", Optical MEMS and Nanophotonics (OMN), 2011 International Conference on (Istanbul, Turkey, 8-11 Aug. 2011), pp.115-116.

135
LIST OF REFERENCES
[1] "Cancer facts and figures 2012,” Atlanta: American Cancer Society; 2012.
[2] D. Huang, E. A. Swanson, C. P. Lin, J. S. Schuman, W. G. Stinson, W. Chang, M. R. Hee, T. Flotte, K. Gregory, C. A. Puliafito, and J. G. Fujimoto, "Optical coherence tomography", Science 254, 1178-1181 (1991).
[3] P. Rai-Choudhury, "MEMS and MOEMS: Technology and Applications," SPIE Press, 2000.
[4] J. M. Bustillo, R. T. Howe, and R. S. Muller, "Surface micromachining for microelectromechanical systems," Proceedings of the IEEE 86, 1552-1574, (1998).
[5] G. T. A. Kovacs, N. I. Maluf, and K. E. Petersen, "Bulk micromachining of silicon," Proceedings of the IEEE, 86, 1536-1551, (1998).
[6] F. Koenig, J. Knittel, and H. Stepp, "Diagnosing cancer in vivo," Science 292, 1401-1403, (2001).
[7] V. Backman, L. T. Perelman, J. T. Arendt, R. Gurjar, M. G. Muller, Q. Zhang, G. Zonios, E. Kline, T. McGillican, T. Valdez, J. V. Dam, M. Wallace, K. Badizadegan, J. M. Crawford, M. Fitzmaurice, S. Kabani, H. S. Levin, M. Seiler, R.R.Dasari, I. Itzkan, and M. S. Feld, "Detection of preinvasive cancer cells," Nat. Biotechnol 406, 35-36, (2000).
[8] N. Claxton, T. Fellers, and M. Davidson, "Laser Scanning Confocal microscopy." Olympus, (2006).
[9] A. Boyde, L. Lovicar and J. Zamecnik, "Combining confocal and BSE SEM imaging for bone block surfaces, Eur Cells Mater 9, 33–38 (2005).
[10] Z. Sbeity, P. M. Palmiero, C. Tello, J. M. Liebmann, and R. Ritch, "Non-contact in vivo confocal scanning laser microscopy in exfoliation syndrome, exfoliation syndrome suspect and normal eyes." Acta Ophthalmol 89(3), 241, (2011).
[11] T. Wilson and A. R. Carlini, "Three dimensional imaging in confocal imaging systems with finite-sized detectors," J. Microscopy, 141, 51-66, (1988).
[12] M. Gu, X. Gan, A. Kisteman, M. G. Xu, "Comparison of penetration depth between two-photon excitation and single-photon excitation in imaging through turbid tissue media," Appl. Phys. Lett. 77, 1551-1553, (2000).
[13] F. Helmchen, and W. Denk, "Deep tissue two-photon microscopy," Nat. Methods 2, 932-940 (2005).

136
[14] P. J. Campagnola, M.Wei, A. Lewis, L. M. Loew, "High-Resolution Nonlinear Optical Imaging of Live Cells by Second Harmonic Generation," Biophys. J. 77(6), 3341-3349, (1999).
[15] X.Deng, E. D. Williams, E. W. Thompson, and X. G. M. Gu, "Second-harmonic generation from biological tissues: Effect of excitation wavelength," Scanning 24, 175-178, (2002).
[16] W. R. Zipfel, R. M. Williams, R. Christie, A. Y. Nikitin, B. T. Hyman, and W. W. Webb, "Live tissue intrinsic emission microscopy using multiphoton-excited native fluorescence and second harmonic generation," Proc. Natl. Acad. Sci. U.S.A. 100, 7075–7080 (2003).
[17] J. Cheng and, X. S. Xie, " Coherent Anti-Stokes Raman Scattering Microscopy: Instrumentation, Theory, and Applications", J. Phys. Chem. B 108(3), 827-840, (2004).
[18] E. O. Potma, C. L. Evans, and X. S. Xie, "Heterodyne coherent anti-Stokes Raman scattering (CARS) imaging," Opt. Lett. 31, 241-243 (2006).
[19] A. Puliafito, M. R. Hee, C. P. Lin, E. Reichel, J. S. Schuman, J. S. Duker, J. A. Izatt, E. A. Swanson, and J. G. Fujimoto, "Imaging of macular diseases with optical coherence tomography," Ophthalmology 102, 217-229 (1995).
[20] J. S. Schuman, M. R. Hee, A. V. Arya, T. Pedut-Kloizman, C. A. Puliafito, J. G. Fujimoto, and E. A. Swanson, "Optical coherence tomography: a new tool for glaucoma diagnosis," Curr. Opin. Ophthalmol. 6, 89-95 (1995).
[21] J. G. Fujimoto, "Optical coherence tomography for ultrahigh resolution in vivo imaging," Nat. Biotechnol. 21, 1361-1367 (2003).
[22] E. A. Swanson, D. Huang, M. R. Hee, J. G. Fujimoto, C. P. Lin, and C. A. Puliafito, "High-speed optical coherence domain reflectometry," Opt. Lett. 17, 151-153 (1992).
[23] J. Welzel, "Optical coherence tomography in dermatology: a review," Skin Res. Technol. 7, 1- 9 (2001).
[24] B. H. Park, C. Saxer, S. M. Srinivas, and J. F. de Boer, "In vivo burn depth determination by high-speed fiber-based polarization sensitive optical coherence tomography," J. Biomed. Opt. 6, 474-479 (2001).
[25] M. C. Pierce, R. L. Sheridan, B. H. Park, B. Cense, and J. F. de Boer, "Collagen denaturation can be quantified in burned human skin using polarization-sensitive optical coherence tomography," Burns 30, 511-517 (2004).
[26] M. V. Sivak, Jr., K. Kobayashi, J. A. Izatt, A. M. Rollins, R. Ung-Runyawee, A. Chak, R. C. Wong, G. A. Isenberg, and J. Willis, "High-resolution endoscopic

137
imaging of the GI tract using optical coherence tomography," Gastrointest. Endosc. 51, 474-479 (2000).
[27] S. Jackle, N. Gladkova, F. Feldchtein, A. Terentieva, B. Brand, G. Gelikonov, V. Gelikonov, A. Sergeev, A. Fritscher-Ravens, J. Freund, U. Seitz, S. Schroder, and N. Soehendra, "In vivo endoscopic optical coherence tomography of esophagitis, Barrett's esophagus, and adenocarcinoma of the esophagus," Endoscopy 32, 750- 755 (2000).
[28] X. D. Li, S. A. Boppart, J. Van Dam, H. Mashimo, M. Mutinga, W. Drexler, M. Klein, C. Pitris, M. L. Krinsky, M. E. Brezinski, and J. G. Fujimoto, "Optical coherence tomography: advanced technology for the endoscopic imaging of Barrett's esophagus," Endoscopy 32, 921-930 (2000).
[29] J. M. Poneros, S. Brand, B. E. Bouma, G. J. Tearney, C. C. Compton, and N. S. Nishioka, "Diagnosis of specialized intestinal metaplasia by optical coherence tomography," Gastroenterology 120, 7-12 (2001).
[30] G. J. Tearney, M. E. Brezinski, B. E. Bouma, S. A. Boppart, C. Pitris, J. F. Southern, and J. G. Fujimoto, “In vivo endoscopic optical biopsy with optical coherence tomography,” Science 276, 2037-2039 (1997).
[31] H. L. Fu, Y. Leng, M. J. Cobb, K. Hsu, J. H. Hwang and X. Li, "Flexible miniature compound lens design for high-resolution optical coherence tomography balloon imaging catheter", J. Biomed. Opt. 13, 060502 (2008).
[32] T. Xie, D. Mukai, S. Guo, M. Brenner, and Z. Chen, "Fiber-optic-bundle-based optical coherence tomography," Opt. Lett. 30, 1803-1805 (2005).
[33] A. Sergeev, V. Gelikonov, G. Gelikonov, F. Feldchtein, R. Kuranov, N. Gladkova, N. Shakhova, L. Snopova, A. Shakhov, I. Kuznetzova, A. Denisenko, V. Pochinko, Yu Chumakov, and O. Streltzova, “In vivo endoscopic OCT imaging of precancer and cancer states of human mucosa,” Opt. Express 1, 432-440 (1997).
[34] Y. Wang, M. Bachman, G. -P. Li, S. Guo, B. J. F. Wong, and Z. Chen, "Low-voltage polymer-based scanning cantilever for in vivo optical coherence tomography," Opt. Lett. 30, 53-55 (2005).
[35] X. Liu, M. J. Cobb, Y. Chen, M. B. Kimmey, and X. Li, "Rapid-scanning forward-imaging miniature endoscope for real-time optical coherence tomography," Opt. Lett. 29, 1763-1765 (2004).
[36] J. Wu, M. Conry, C. Gu, F. Wang, Z. Yaqoob, and C. Yang, "Paired-angle-rotation scanning optical coherence tomography forward-imaging probe," Opt. Lett. 31, 1265-1267 (2006).

138
[37] L. J. Hornbeck, "Digital light processing and MEMS: An overview," presented at the IEEE/LEOS 1996 Summer Topical Meetings Keystone, CO, Aug. 5-9, (1996).
[38] S.J.Shellhammer, D. P. Goren, T. Pavlidis, "Novel signal-processing techniques in barcode scanning," Robotics & Automation Magazine, IEEE, 6 (1), 57-65, (1999).
[39] T. M. Lippert, "Virtual retinal display, a scanned photon delivery system," LEOS Annual Meeting. 1, 283-284, (1999).
[40] W.O. Davis, R. Sprague, J. Miller, "MEMS-based pico projector display," Optical MEMs and Nanophotonics, 2008 IEEE/LEOS International Conference on, 31-32, (2008).
[41] J. Bernstein, S. Cho, A.T. King, A. Kourepenis, P. Maciel, M. Weinberg, "A micromachined comb-drive tuning fork rate gyroscope," Micro Electro Mechanical Systems, 1993, MEMS '93, Proceedings An Investigation of Micro Structures, Sensors, Actuators, Machines and Systems. IEEE. 143-148, Feb, (1993).
[42] http://endoscopy.md/index.php
[43] B. J. Catalone, “Flexible Endoscopy: Infection Control and Best Practices,” Sept. 18, (2007).
[44] P. Cotton, Advanced Digestive Endoscopy: Practice and Safety (Wiley-Blackwell, 1st edition, 2008).
[45] Y. Pan, H. Xie, and G. K. Fedder, "Endoscopic optical coherence tomography based on a microelectromechanical mirror," Opt. Lett. 26, 1966-1968 (2001).
[46] K. E. Petersen, "Silicon Torsional Scanning Mirror," IBM J. Res. Dev. 24 (5), 631-637, (1980).
[47] L. Fan and M. C. Wu, "Two-Dimensional Optical Scanner with Large Angular Rotation Realized by Self-Assembled Micro-Elevator," IEEE/LEOS Summer Topical Meetings, 107-108, (1999).
[48] G. D. J. Su, H. Toshiyoshi, and M. C. Wu, "Surface-Micromachined 2-D Optical Scanners with High-Performance Single-Crystalline Silicon Micromirrors," Photonics Technology Letters 13, 606-608, (2001).
[49] D. S. Greywall, C.S. Pai, S. H. Oh, C. P. Chang, D. M. Marom, P. A. Busch, R. A. Cirelli, J. A. Taylor, F. P. Klemens, T. W. Sorsch, J. E. Bower, W. Y. C. Lai, and H. T. Soh, "Monolithic Fringe-Field-Activated Crystalline Silicon Tilting-Mirror Devices," J. Microelectromech. S. 12, 702-707, (2003).

139
[50] D. S. Greywall, C.S. Pai, S. H. Oh, C. P. Chang, D. M. Marom, P. A. Busch, R. A. Cirelli, J. A. Taylor, F. P. Klemens, T. W. Sorsch, J. E. Bower, W. Y. C. Lai, and H. T. Soh, "Monolithic Fringe-Field-Activated Crystalline Silicon Tilting-Mirror Devices," J. Microelectromech. S. 12, 702-707, (2003).
[51] Z. Hao, W. Brian, W. Michael, B. Justin, and H. J. A, "A design methodology for a bulk-micromachined two-dimensional electrostatic torsion micromirror," J. Microelectromech. S. 12, 692-701, (2003).
[52] J. C. Chiou and Y. C. Lin, "A Multiple Electrostatic Electrodes Torsion Micromirror Device With Linear Stepping Angle Effect," J. Microelectromech. S. 12, 913-920, (2003).
[53] M. R. Dokmeci, A. Pareek, S. Bakshi, M. Waelti, C. D. Fung, K. H. Heng, and C. H. Mastrangelo, "Two-Axis Single-Crystal Silicon Micromirror Arrays," J. Microelectromech. S. 13, 1006-1017, (2004).
[54] K. Joudrey, G. G. Adams, and N. E. McGruer, "Design, modeling, fabrication and testing of a high aspect ratio electrostatic torsional MEMS micromirror," J. Micromech. Microeng. 16, 2147-2156, (2006).
[55] R. A. Conant, J. T. Nee, K. Y. Lau and R. S. Muller," A flat high-frequency scanning micromirror, " Hilton Head Solid-State Sensor and Actuator Workshop (2000).
[56] H. Schenk, P. Dun, D. Kunze, H. Laher, and H. Kiick, " An Electrostatically Excited 2D Micro-Scanning-Mirror with an In-plane Configuration of the Driving Electrodes," presented at the 13th IEEE International Conference on Micro Electro Mechanical Systems, (2000).
[57] W. Piyawattanametha, P. R. Patterson, D. Hah, H. Toshiyoshi, and M. C. Wu, "Surface and Bulk- Micromachined Two-Dimensional Scanner Driven by Angular Vertical Comb Actuators," J. Microelectromech. S. 14, 1329-1338, (2005).
[58] V. Milanovic, G. A. Matus, and D. T. McCormick, "Gimbal-Less Monolithic Silicon Actuators for Tip-Tilt-Piston Micromirror Applications," Journal of Selected Topics in Quantum Electronics 10, 462-471, (2004).
[59] H. Xie, Y. Pan, and G. K. Fedder, "A CMOS-MEMS Mirror With Curled-Hinge Comb Drives," J. Microelectromech. S. 12, 450-457, (2003).
[60] P. R. Patterson, D. Hah, N. Hung, H. Toshiyoshi, R. Chao, and M. C. Wu, "A Scanning Micromirror with Angular Comb Drive Actuation," presented at the 15th IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, (2002).

140
[61] W. Jung, D. T. McCormick, J. Zhang, L. Wang, N. C. Tien, and Z. Chen, "Three-dimensional endoscopic optical coherence tomography by use of a two-axis microelectromechanical scanning mirror," Appl. Phys. Lett. 88, 1-3, (2006).
[62] D. T. McCormick, W. Jung, Y.-C. Ahn, Z. Chen, and N. C. Tien, "A Three Dimensional Real-Time MEMS Based Optical Biopsy System For in vivo Clinical Imaging," Transducers, 203-208, (2007).
[63] A. D. Aguirre, P. R. Hertz, Y. Chen, J. G. Fujimoto, W. Piyawattanametha, L. Fan, and M. C. Wu, "Two-axis MEMS Scanning Catheter for Ultrahigh Resolution Three-dimensional and En Face Imaging," Opt. Express 15, 2445-2453 (2007).
[64] R. A. Miller and Y. C. Tai, "Micromachined Electromagnetic Scanning Mirror," Opt. Eng. 36, 1399-1407, (1997).
[65] A. D. Yalcinkaya, H. Urey, and S. Holmstrom, "Nife Plated Biaxail Magentostatic MEMS Scanner," presented at the14th IEEE Intl. Conf. on Solid-State Sensors, Actuators and Microsystems, Lyon, France, 10-14, (2007).
[66] J. W. Judy and R. S. Muller, "Magnetically Actuated, Addressable Microstructures," J. Microelectromech. S. 6, 249-256, (1997).
[67] I. J. Cho, K. S. Yun, H. K. Lee, J. B. Yoon, and E. Yoon, "A Low-Voltage Two-Axis Electromagnetically Actuated Micromirror with Bulk Silicon Mirror Plates and Torsion Bars," presented at the 15th IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, 20-24, (2002).
[68] J. Bernstein, W. P. Taylor, J. D. Brazzle, C. J. Corcoran, G. Kirkos, J. E. Odhner, A. Pareek, M. Waelti, and M. Zai, "Electromagnetically Actuated Mirror Arrays for Use in 3-D Optical Switching Applications," J. Microelectromech. S. 13, 526-535, (2004).
[69] S. H. Ahn and Y. K. Kim, "Silicon scanning mirror of two DOF with compensation current routing," J. Micromech. Microeng. 14, 1455-1461, (2004).
[70] H. A. Yang, T. L. Tang, S. T. Lee, and W. Fang, "A Novel Coilless Scanning Mirror Using Eddy Current Lorentz Force and Magnetostatic Force," J. Microelectromech. S. 16, 511-520, (2007).
[71] K. H. Kim, B. H. Park, G. N. Maguluri, T. W. Lee, F. J. Rogomentich, M. G. Bancu, B. E. Bouma, J. F. d. Boer, and J. J. Bernstein, "Two-axis magnetically-driven MEMS scanning catheter for endoscopic high-speed optical coherence tomography," Opt. Express, 15, 18130-18140, (2007.
[72] Y. Watanabe, Y. Abe, S. Iwamatsu, S. Kobayashi,Y. Takahashi, T. Sato, "Electromagnetically Driven 2-axis Optical Beam Steering MEMS Mirror and

141
Dependence of Actuation on Magentic Field", IEEJ Transactions on Sensors and Micromachines 130(4), 107-112 (2010).
[73] T. Kawabata, M. Ikeda, H. Goto, M. Matsumoto, and T. Yada, "The 2-Dimensional Micro Scanner Integrated with PZT Thin Film Actuator," presented at the 9th International Conference on Solid State Sensors and Actuators, Chicago, IL, (1997).
[74] H. J. Nam, Y. S. Kim, S. M. Cho, Y. Yee, and J. U. Bu, "Low Voltage PZT Actuated Tilting Micromirror With Hinge Structure," presented at the 2002 IEEE/LEOS International Conference on Optical MEMS, Lugano, Switzerland, Aug. 20-23, (2002).
[75] N. Kikuchi, Y. Haga, M. Maeda, W. Makishi, and M. Esashi, "Piezoelectric 2-D Micro Scanner for Minimally Invasive Therapy Fabricated Using Femtosecond Laser Ablation," presented at the 12th International Conference on Solid State Sensors, Actuators and Microsystems, Boston, MA, Jun. 8-12, (2003).
[76] Y. Yee, J. U. Bu, M. Ha, J. Choi, H. Oh, S. Lee, and H. Nam, "Fabrication and Characterization of a PZT Actuated Micromirror with Two-axis Rotational Motion for Free Space Optics," presented at the 14th IEEE International Conference on Micro Electro Mechanical Systems, Interlaken, Switzerland, Jan. 21-25, (2001).
[77] J. Tsaur, L. Zhang, R. Maeda, and S. Matsumoto, "2D Micro Scanner Actuated by Sol- Gel Derived Double Layered PZT," presented at the15th IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, Jan. 20-24, (2002).
[78] J. G. Smits, K. Fujimoto, and V. F. Kleptsyn, "Microelectromechanical flexure PZT actuated optical scanner: static and resonance behavior," J. Micromech. Microeng. 15, 1285-1293, (2005).
[79] K. H. Gilchrist, R. P. McNabb, J. A Izatt and S. Grego, "Piezoelectric scanning mirrors for endoscopic optical coherence tomograph", J. Micromech. Microeng. 19, 095012, (2009).
[80] R. Buser, N. F. d. Rooij, H. Tischauser, A. Dommann, and G. Staufert, "Biaxial Scanning Mirror Activated by Bimorph structures for Medical Applications," Sensor. Actuator. A, 31, 29-34, (1992).
[81] J. Bühler, J. Funk, O. Paul, F. P. Steiner, and H. Baltes, "Thermally Actuated CMOS Micromirrors," Sensor. Actuator. A, 46-47, 572-575, (1995).
[82] M. E. Motamedi, S. Park, A. Wang, M. S. Dadkhah, A. P. Andrews, H. O. Marcy, M. Khoshnevisan, and A. E. Chiou, "Development of Micro-Electro-Mechanical Optical Scanner," Opt. Eng. 36, 1346-1353, (1997).

142
[83] M. Ataka, A. Omodaka, N. Takeshima, and H. Fujita, "Fabrication and Operation of Polyimide Bimorph Actuators for a Ciliary Motion System," J. Microelectromech. S. 2, 146-150, (1993).
[84] G. Lin, C. J. Kim, S. Konishi, and H. Fujita, "Design, Fabrication, And Testing of A C shape Actuator," presented at the 8th International Conference on Solid-State Sensors and Actuators, Stockholm, Sweden, Jun. 25-29, (1995).
[85] S. Schweizer, S. Calmes, M. Laudon, and P. Renaud, "Thermally Actuated Microscanner with Large Angle and Low Consumption," Sensor. Actuator. A. 706, 470-477, (1999).
[86] Q. Liu and Q. A. Huang, "Micro-Electro-Mechanical Digital-to-Analog Converter Based on a Novel Bimorph Thermal Actuator," presented at the IEEE Sensors 2002, Orlando, FL, Jun. 12-1, (2002).
[87] M. Sinclair, "A High Frequency Resonant Scanner Using Thermal Actuator," presented at the 15th IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, Jan. 20-24, (2002).
[88] A. Jain, A. Kopa, Y. Pan, G. K. Fedder, and H. Xie, "A Two-Axis Electrothermal Micromirror for Endoscopic Optical Coherence Tomography," IEEE Journal of Selected Topics in Quantum Electronics 10, 636-642, (2004).
[89] H. Xie, Y. Pan, and G. K. Fedder, "Endoscopic optical coherence tomographic imaging with a CMOS-MEMS micromirror" Sensor. Acutat. A-Phys. 103(1-2), 237-241, (2003).
[90] T. Xie, H. Xie, G. K. Fedder; Y. Pan, "Endoscopic optical coherence tomography with new MEMS mirror," Electron. Lett. 39 (21), 1535- 1536, (2003).
[91] Y. Xu, J. Singh, C. S. Premachandran, A. Khairyanto, K. W. S. Chen, N. Chen, C. J. R. Sheppard, and M. Olivo, "Design and development of a 3D scanning MEMS OCT probe using a novel SiOB package assembly" J. Micromech. Microeng. 18, 125005, (2008 ).
[92] J Singh, J. H. S. Teo, Y. Xu, C. S. Premachandran, N. Chen, R. Kotlanka, M. Olivo, and C. J. R. Sheppard, "A two axes scanning SOI MEMS micromirror for endoscopic bioimaging " J. Micromech. Microeng. 18, 025001, (2008).
[93] X. J. Mu, G. Y. Zhou, H. H. Feng, Y. S. Xu, A. B. Yu, C. W. Tan, K. W. S. Chen, J. Xie, F. S. Chau, "A 3mm endoscopic probe with integrated MEMS micromirror for optical coherence tomography bioimaging," Procedia Engineering 5, Eurosensor XXIV Conference, 681-684, (2010).
[94] M. F. Wang, Y. Xu, C. S. Prem, K. W. Chen, J. Xie, X, Mu, C. W. Tan, A. Yu, H. Feng, "Microfabricated endoscopic probe integrated MEMS micromirror for optical coherence tomography bioimaging," Engineering in Medicine and

143
Biology Society Annual International Conference of the IEEE, 57-60, Aug. 31 2010-Sept. 4, (2010).
[95] X. Mu, W. Sun, H. Feng, A. Yu, K. W. S. Chen, C. Y. Fu, M. Olivo, "MEMS micromirror integrated endoscopic probe for optical coherence tomography bioimaging," Sensor Actuat A-Phys. 168(1), 202-212, (2011)
[96] D. S. Mamedov, S. D. Yakubovich, P. I. Lapin, M. Wojtkowski, and J. G. Fujimoto, "Novel Near-IR Broad-Band Light Sources for Optical Coherence Tomography Based on Superluminescent Diodes," in Optical Coherence Tomography and Coherence Techniques II, W. Drexler, ed., 5861 of Proc. SPIE (Optical Society of America, 2005), paper MA8.
[97] http://www.thorlabs.com/NewGroupPage9.cfm?ObjectGroup_ID=4285
[98] H. Wang, M. W. Jenkins, and A. M. Rollins, “A combined multiple-SLED broadband light source at 1300 nm for high resolution optical coherence tomography,” Opt. Commun. 281(7), 1896–1900 (2008).
[99] http://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=1760
[100] G. J. Tearney, B. E. Bouma, S. A. Boppart, B. Golubovic, E. A. Swanson, and J. G. Fujimoto, “Rapid acquisition of in vivo biological images by use of optical coherence tomography,” Opt. Lett. 21, 1408–1410 (1996).
[101] J. P. Heritage, A. M. Weiner, and R. N. Thurston, "Picosecond pulse shaping by spectral phase and amplitude manipulation," Opt. Lett. 10, 609-611 (1985) .
[102] K. F. Kwong, D. Yankelevich, K. C. Chu, J. P. Heritage, and A. Dienes, "400-Hz mechanical scanning optical delay line," Opt. Lett. 18, 558-560 (1993).
[103] A. M. Weiner, D. E. Leaird, J. S. Patel, and J. R. Wullert, "Programmable femtosecond pulse shaping by use of a multielement liquid-crystal phase modulator," Opt. Lett. 15, 326-328 (1990).
[104] G. J. Tearney, M. E. Brezinski, B. E. Bouma, S. A. Boppart, C. Pitris, J. F. Southern, and J. G. Fujimoto, "In vivo endoscopic optical biopsy with optical coherence tomography", Science 27 June 1997: 276 (5321), 2037-2039, (1997).
[105] W. K. Niblack, J. O. Schenk, B. Liu, and M. E. Brezinski, "Dispersion in a grating-based optical delay line for optical coherence tomography," Appl. Opt. 42, 4115-4118 (2003).
[106] T. Xie, Z. Wang, and Y. Pan, "Dispersion compensation in high-speed optical coherence tomography by acousto-optic modulation," Appl. Opt. 44, 4272-4280 (2005).

144
[107] G. J. Tearney, B. E. Bouma, and J. G. Fujimoto, "High-speed phase- and group-delay scanning with a grating-based phase control delay line," Opt. Lett. 22, 1811-1813 (1997).
[108] L. Wang, Z. Ding, G. Shi, and Y. Zhang, "In vivo retinal imaging by optical coherence tomography using an RSOD-based phase modulator", Journal of Zhejiang University - Science A. 10(4), 607-612, (2009).
[109] A. F. Fercher, W. Drexler, C, K. Hitzenberger, and T. Lasser, "Optical coherence tomography - principles and applications" Rep. Prog. Phys. 66, 239, (2003).
[110] R. Huber, M. Wojtkowski, K. Taira, J. Fujimoto, and K. Hsu, "Amplified, frequency swept lasers for frequency domain reflectometry and OCT imaging: design and scaling principles," Opt. Express 13, 3513-3528, (2005).
[111] S. Lee, B. Kim, "Line-Field Optical Coherence Tomography Using Frequency-Sweeping Source," IEEE Journal of Selected Topics in Quantum Electronics 14(1), 50-55, (2008).
[112] H. Lim, M. Mujat, C. Kerbage, E. C. Lee, Y. Chen, T. C. Chen, J.F. de Boer, "High-speed imaging of human retina in vivo with swept-source optical coherence tomography ", Opt Express 14(26), 12902-8, (2006).
[113] Y.Yasuno, S. Makita, T. Endo, G. Aoki, Y. Nakamura, M. Yamanari,M. Itoh, T. Yatagai, "Standard and line-field fourier domain optical coherence tomography," Engineering in Medicine and Biology Society, 2005. IEEE-EMBS 2005. 7224-7226, 17-18 Jan. (2006).
[114] J. Zhang, B. Rao, Z. Chen, "Swept source based fourier domain functional optical coherence tomography," Engineering in Medicine and Biology Society, 2005. IEEE-EMBS 2005. 7230-7233, (2005).
[115] P. A. Keane, H. Ruiz-Garcia, S.R. Sadda, “Clinical applications of long-wavelength (1,000-nm) optical coherence tomography,” Ophthal Surg Las Im 42 (4), 67-74, (2011).
[116] G. Guaqliumi, R. Virmani, “The race to achieve the gold standard in coronary imaging,” Rev Esp Cardiol 62(6), 615-24, (2009).
[117] A. F. Fercher, C. K. Hitzenberger, and S. Y. El-Zaiat, "Measurement of intraocular distances by backscattering spectral interferometry", Opt. Commun. 117, 43 - 48, (1995).
[118] F. Lexer, C. K. Hitzenberger, A. F. Fercher, and M. Kulhavy, "Wavelength-tuning interferometry of intraocular distances," Appl. Opt. 36, 6548-6553, (1997).

145
[119] T. Yoshimura, N. Masuzumi and T. Shigematu, " Imaging a reflecting plate located in scattering media using optical frequency domain reflectometry " Opt. Rev. 4, 227,(1997).
[120] J. F. de Boer, B. Cense, B. H. Park, M. C. Pierce, G. J. Tearney, and B. E. Bouma, "Improved signal-to-noise ratio in spectral-domain compared with time-domain optical coherence tomography," Opt. Lett. 28, 2067-2069 (2003).
[121] R. Leitgeb, C. Hitzenberger, and Adolf Fercher, "Performance of fourier domain vs. time domain optical coherence tomography," Opt. Express 11, 889-894, (2003).
[122] Y. Zhao, Z. Chen, Z. Ding, H. Ren, and J. S. Nelson, "Real-time phase-resolved functional optical coherence tomography by use of optical Hilbert transformation," Opt. Lett. 27, 98-100, (2002).
[123] V. Westphal, S. Yazdanfar, A. M. Rollins, and J. A. Izatt, "Real-time, high velocity-resolution color Doppler optical coherence tomography," Opt. Lett. 27, 34-36, (2002).
[124] Z. Chen, Y. Zhao, S. M. Srinivas, J. S. Nelson, N. Prakash, and R. D. Frostig, "Optical Doppler Tomography", IEEE J. Sel. Top Quant. 5(4), JULY/AUGUST,
(1999).
[125] Z.Chen, T. E. Milner, X. Wang, S. Srinivas, and J. S. Nelson, "Optical Doppler Tomography: Imaging in vivo Blood Flow Dynamics Following Pharmacological Intervention and Photodynamic Therapy," Photochem. Photobiol. 67 (56–60), (1998).
[126] Y. Zhao, Z. Chen, C. Saxer, S. Xiang, J. F. de Boer, and J. S. Nelson, "Phase-resolved optical coherence tomography and optical Doppler tomography for imaging blood flow in human skin with fast scanning speed and high velocity sensitivity," Opt. Lett. 25, 114-116, (2000).
[127] Z. Ding, Y. Zhao, H. Ren, J. Nelson, and Z. Chen, "Real-time phase-resolved optical coherence tomography and optical Doppler tomography," Opt. Express 10, 236-245 (2002).
[128] Y. Zhao, Z. Chen, C. Saxer, Q. Shen, S. Xiang, J. F. de Boer, and J. S. Nelson, "Doppler standard deviation imaging for clinical monitoring of in vivo human skin blood flow," Opt. Lett. 25, 1358-1360 (2000).
[129] M. R. Hee, D. Huang, E. A. Swanson, and J. G. Fujimoto, “Polarization-sensitive low-coherence reflectometer for birefringence characterization and ranging,” J. Opt. Soc. Am. 9, 903–98 (1992).

146
[130] M. Todorović, S. Jiao, L. V. Wang, and G. Stoica, "Determination of local polarization properties of biological samples in the presence of diattenuation by use of Mueller optical coherence tomography," Opt. Lett. 29, 2402-2404 (2004).
[131] J. F. de Boer, T. E. Milner, and J. S. Nelson, "Determination of the depth-resolved Stokes parameters of light backscattered from turbid media by use of polarization-sensitive optical coherence tomography," Opt. Lett. 24, 300-302 (1999).
[132] E. Götzinger, M. Pircher, B. Baumann, C. Ahlers, W. Geitzenauer, U. Schmidt-Erfurth, and C. K. Hitzenberger, "Three-dimensional polarization sensitive OCT imaging and interactive display of the human retina," Opt. Express 17, 4151-4165 (2009).
[133] Y. Wang, C. Lu, M. Tsai, L. Lu, S. Chen, C. Yang, "In vivo Depth-resolved Birefringence of the Hyperlipidemic Rat’s Liver Monitored with Polarization-Sensitive Optical Coherence Tomography," Lasers and Electro-Optics, 2005. CLEO/Pacific Rim 2005. 90- 91, 30-02 Aug. (2005).
[134] C. Hitzenberger, E. Goetzinger, M. Sticker, M. Pircher, and A. Fercher, "Measurement and imaging of birefringence and optic axis orientation by phase resolved polarization sensitive optical coherence tomography," Opt. Express 9, 780-790 (2001).
[135] G. Yao and L.V. Wang, "Two-dimensional depth-resolved Mueller matrix characterization of biological tissue by optical coherence tomography," Opt. Lett. 24, 537-539 (1999).
[136] K. Schoenenberger, B. W. Colston, D. J. Maitland, L. B. Da Silva, and M. J. Everett, "Mapping of Birefringence and Thermal Damage in Tissue by use of Polarization-Sensitive Optical Coherence Tomography," Appl. Opt. 37, 6026-6036 (1998).
[137] J. F. de Boer, T. E. Milner, M. J. C. van Gemert, and J. S. Nelson, "Two-dimensional birefringence imaging in biological tissue by polarization-sensitive optical coherence tomography," Opt. Lett. 22, 934-936 (1997).
[138] H. Ren, Z. Ding, Y. Zhao, J. Miao, J. S. Nelson, and Z. Chen, "Phase-resolved functional optical coherence tomography: simultaneous imaging of in situ tissue structure, blood flow velocity, standard deviation, birefringence, and Stokes vectors in human skin," Opt. Lett. 27, 1702-1704 (2002).
[139] A. Jain, A. Kopa, Y. Pan, G. K. Fedder, and H. Xie, "A Two-Axis Electrothermal Micromirror for Endoscopic Optical Coherence Tomography," IEEE J. Sel. Top. Quant. 10, 636-642, (2004).

147
[140] L. Wu, and H. Xie, “A large vertical displacement electrothermal bimorph microactuator with very small lateral shift,” Sens. Actuators, A 145–146, 371–379 (2008).
[141] K. Jia, S. R. Samuelson and H. Xie, "Single-wafer solution and optical phased array application of micro-mirror arrays with high fill factor and large sub-apertures," in Digest Tech. Papers IEEE MEMS’10 Conference, Hong Kong, Jan 24-28, 180-3, (2010).
[142] M. Motamedi and S. Rastegar, “Light and temperature distribution in laser irradiated tissue: the influence of anisotropic scattering and refractive index,” Appl. Opt. 28, 2230–2237 (1989).
[143] S. R. Arridge and J. C. Hebden, “Optical imaging in medicine: II. Modelling and reconstruction,” Phys. Med. Biol. 42, 841–853 (1997).
[144] H. Dehghani, B. Brooksby, K. Vishwanath, B. W. Pogue, and K. D. Paulsen, " The effects of internal refractive index variation in near-infrared optical tomography: a finite element modelling approach", Phys. Med. Biol. 48 2713, (2003).
[145] F. P. Bolin, L. E. Preuss, R. C. Taylor, and R. J. Ference, "Refractive index of some mammalian tissues using a fiber optic cladding method," Appl. Opt. 28, 2297-2303 (1989)
[146] Q. W. Song, C. Ku, C. Zhang, and R. Michalak, "Modified critical angle method for measuring the refractive index of bio-optical materials and its application to bacteriorhodopsin," J. Opt. Soc. Am. B 12, 797-803 (1995).
[147] H. Li and S. Xie, "Measurement method of the refractive index of biotissue by total internal reflection," Appl. Opt. 35, 1793-1795 (1996).
[148] G. J. Tearney, M. E. Brezinski, J. F. Southern, B. E. Bouma, M. R. Hee, and J. G. Fujimoto, "Determination of the refractive index of highly scattering human tissue by optical coherence tomography," Opt. Lett. 20, 2258-2260 (1995).
[149] J. Binding, J. B. Arous, J. F. Léger, S. Gigan, C. Boccara, and L. Bourdieu, "Brain refractive index measured in vivo with high-NA defocus-corrected full-field OCT and consequences for two-photon microscopy," Opt. Express 19, 4833-4847, (2011).
[150] N. Lue, J. Bewersdorf, M. D. Lessard, K. Badizadegan, R. R. Dasari, M. S. Feld, and G. Popescu, "Tissue refractometry using Hilbert phase microscopy," Opt. Lett. 32, 3522-3524 (2007).
[151] B. Rappaz, P. Marquet, E. Cuche, Y. Emery, C. Depeursinge, and P. Magistretti, "Measurement of the integral refractive index and dynamic cell morphometry of

148
living cells with digital holographic microscopy," Opt. Express 13, 9361-9373 (2005).
[152] J. Beuthan, O. Minet, J. Helfmann, M. Herrig, and G. Müller, “The spatial variation of the refractive index in biological cells,” Phys. Med. Biol. 41(3), 369-382 (1996).
[153] N. L. Dorward, A. Olaf, B. Velani, F. A. Gerritsen,W. F. J. Harkness, N.D. Kitchen, and D. G. T. Thomas, “Postimaging brain distortion: Magnitude, correlates, and impact on neuronavigation,” Journal of Neurosurgery 88, 656–662, (1998).
[154] D. W. Roberts, A. Hartov, F. E. Kennedy, M. I. Miga, and K. D. Paulsen, “Intraoperative brain shift and deformation: A quantitative analysis of cortical displacement in 28 cases,” Neurosurgery, 43(4), 749–758, Oct. (1998).
[155] S. Cheng and L.E. Bilston, “Computational model of the cerebral ventricles in hydrocephalus,” J. Biomed. Eng. 132(5), 054501, May (2010).
[156] Joseph Schmitt, "OCT elastography: imaging microscopic deformation and strain of tissue," Opt. Express 3, 199-211 (1998).
[157] S. J. Lee, J. Sun, J. Flint, S. Guo, H. Xie, M. King, and M. Sarntinoranont, "Optically based-indentation technique for acute rat brain tissue slices and thin biomaterials", J. Biomed. Mater. Res. B, 97(1), (2011).
[158] J. Sun, S. Guo, L. Wu, L. Liu, S. Choe, B. S. Sorg, and H. Xie, "3D In vivo optical coherence tomography based on a low-voltage, large-scan-range 2D MEMS mirror," Opt. Express 18, 12065-12075 (2010).
[159] C. Nicholson, E. Sykova, "Extracellular space structure revealed by diffusion analysis." Trends Neurosci, 21, 207-215, (1998).
[160] T. Shigeno, M. Brock, S. Shigeno, E. Fritschka, and J. Cervós-Navarro, “The determination of brain water content: microgravimetry versus drying-weighing method”, J. Neurosurg. 57(1), 99-107, (1982).
[161] G. Xu, P. Bayly, L. Taber, “Residual stress in the adult mouse brain," Biomech. Model. Mechanobiol. 8(4), 253-62 (2009).
[162] A. A. Oraevsky, S. L. Jacques, R. O. Esenaliev, and F. K. Tittel, “Laser based optoacoustic imaging in biological tissues,” Proc. SPIE 2134A, 122–128 (1994).
[163] A. A. Oraevsky, and A. A. Karabutov, “Optoacoustic tomography,” Chapter 34 in Biomedical Photonics Handbook, T. Vo-Dinh, ed. (CRC Press, Boca Raton, FL, 2003), PM125, 34/1–34/34, (2003).

149
[164] A. A. Oraevsky, A. A. Karabutov, and S. V. Solomatin, “Laser optoacoustic imaging of breast cancer in vivo,” Proc. SPIE 4256, 6–11 (2001).
[165] S. Manohar, A. Kharine, J. C. G. van Hespen, W. Steenbergen, and T. G. van Leeuwen, “The Twente Photoacoustic Mammoscope: system overview and performance,” Phys. Med. Biol. 50(11), 2543–2557 (2005).
[166] S. Manohar, A. Kharine, J. C. G. van Hespen, W. Steenbergen, and T. G. van Leeuwen, “Photoacoustic mammography laboratory prototype: imaging of breast tissue phantoms,” J. Biomed. Opt. 9(6), 1172–1181 (2004).
[167] Q. Zhang, Z. Liu, P. R. Carney, Z. Yuan, H. Chen, S. N. Roper, and H. Jiang, “Non-invasive imaging of epileptic seizures in vivo using photoacoustic tomography,” Phys. Med. Biol. 53(7), 1921–1931 (2008).
[168] Y. Sun, E. Sobel, and H. Jiang, “Quantitative three-dimensional photoacoustic tomography of the finger joints: an in vivo study,” J. Biomed. Opt. 14(6), 064002 (2009).
[169] Y. Sun, and H. Jiang, “Quantitative three-dimensional photoacoustic tomography of the finger joints: phantom studies in a spherical scanning geometry,” Phys. Med. Biol. 54(18), 5457–5467 (2009).
[170] J. A. Viator, G. Au, G. Paltauf, S. L. Jacques, S. A. Prahl, H. Ren, Z. Chen, and J. S. Nelson, “Clinical testing of a photoacoustic probe for port wine stain depth determination,” Lasers Surg. Med. 30(2), 141–148 (2002).
[171] B. Yin, D. Xing, Y. Wang, Y. Zeng, Y. Tan, and Q. Chen, “Fast photoacoustic imaging system based on 320-element linear transducer array,” Phys. Med. Biol. 49(7), 1339–1346 (2004).
[172] E. Z. Zhang, J. G. Laufer, R. B. Pedley, and P. C. Beard, “In vivo high-resolution 3D photoacoustic imaging of superficial vascular anatomy,” Phys. Med. Biol. 54(4), 1035–1046 (2009).

150
BIOGRAPHICAL SKETCH
Jingjing Sun was born in Tianjin, China in January of 1985. She enrolled in Tianjin
University in Tianjin, China in the fall of 2003. Four years later, in July 2007, she
received her Bachelor’s degree in information engineering. After graduation, she joined
the Biophotonics and Microsystems Lab at the University of Florida, and started working
with Dr. Huikai Xie on MEMS based OCT imaging research. In December 2010, she
obtained her Master of Science degree in electrical engineering. And she is expected to
graduate with her Ph.D. degree in electrical engineering in May 2012.