Embed Size (px)
Citation preview

,
TECNOLOGICO DE MONTERREY®
Campus Ciudad de México
Blblfoteca C.;&Qildad._...,
Escuela de Graduados en Ingeniera y Arquitectura
Maestría en Ciencias de la Computación
"Simulador de tráfico en tiempo real"
Autor: Felipe Morales Torres
Director de la tesis: Dr. Benjamín Hernández Arreguín
Abril 2012

CONTENIDO
Lista de Figuras
Lista de Tablas
1. Introducción 1.1. Antecedentes ..... . 1.2. Definición del problema 1.3. Objetivos . 1 .4. Justificación . 1.5. Hipótesis .. 1.6. Metodología .
2. Marco Teórico 2.1. Multitudes . . . . . . . . . . . . . . . .
2.1.1. Introducción a las multitudes . . 2.1.2. Características de una multitud . 2.1.3. Modelado por tipo de multitud
2.2. Simulación de tráfico . . . . . . . . . . 2.2.1. Movimiento de vehículos . . . . 2.2.2. Automatización y Simulación de tráfico
2.3. Cómputo en paralelo 2.3.1. GPU . 2.3.2. CUDA
3. Desarrollo y Simulación 3.1. Especificaciones generales 3.2. Variables de entrada ...
3.2.1. Agentes . . . . . 3.2.2. Caminos o rutas 3.2.3. Edificios .... 3.2.4. Otras variables .
3.3. Procesamiento de Variables de entrada 3.4. Vinculación de nodos para generar rutas 3.5. Generación de movimiento ...... .
4. Resultados y Conclusiones 4.0.1. Conclusiones . 4.0.2. Trabajo a futuro .
¡¡
iv
1 3 4
7
7
8 8
10 10 10 11 12 18 21 30 57 58 63
71 71 73 74 76 80 80 81 84 88
97 105 106

LISTA DE FIGURAS
1.1. Estadísticas de crecimiento mundial 1950-201 O 2 1.2. Tipos de multitudes . . . . . . . . . . . . . . . 3 1.3. Factores de influencia en una multitud . . . . . 4 l .4. Flujo de multitud en pasillo con una sola puerta 4
2.1. Multitudes por tamaño: pequeñas, medianas y grandes 11 2.2. Multitud enorme estudiada como un fluido, fotografía real 13 2.3. Multitud enorme estudiada como un fluido, simulación en forma de fluido 13 2.4. Multitud simulada dentro de VRLab . . . . . . . . . . . . . . . 14 2.5. Esquema gráfico de animacion en el desarrollo de VRLab . . . . 15 2.6. Ejemplo de una animación de multitudes con partículas en maya 17 2.7. Intersección simulada de la ciudad de XiaDongMen 20 2.8. Visualización de una red micro y macroscópica . . . . . . . . . . . . . . . 21 2.9. Resultados del enfoque basado en el movimiento de gas para el tráfico . . . 25 2.1 O. Ejemplo de un modelo LWR, mediendo la densidad mediante las variables
de tiempo y velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 2.11. Gráfica de comparación entre lo medido en tiempo real y lo simulado por
medio de ecuaciones estocásticas . . . . . . . . . . . . . . . . . . . . . . . 28 2.12. Planeación de ruta de movimientos para controlar la forma en la que un
vehículo se estaciona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 2.13. Resultado final de las pruebas de movimiento hacia atras con 5 remolques en
un trailer . . . . . . . . . . . . . . . . . 30 2.14. Ejemplo de un dispositivo car-like robot . . . . . . . . . . . 31 2.15. Curva de Bezier . . . . . . . . . . . . . . . . . . . . . . . 34 2.16. Diferentes ramificaciones con longitudes y angulas variados 35 2.17. Sistema de seguimiento de llegadas de autobuses, utilizando smartphones 37 2.18. Estadísticas de resultados del estudio del salto transversal, en la comunica-
ción entre vehículos, utilizando VANETs . 41 2.19. Modelo Ackerman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 2.20. Resultados del algoritmo CUT . . . . . . . . . . . . . . . . . . . . . . . . 43 2.21. Resultados del simulador híbrido en enfoques macroscópicos y microscópicos 46 2.22. Ejemplos de topologias de redes Myrinet . . . . . . . . . . . . . . . . . . . 49 2.23. Cluster de computadoras en red Myrinet . . . . . . . . . . . . . . . . . . . 49 2.24. Correlación entre el estado y la densidad local, de acuerdo a un tiempo es-
pecífico . . . . . . . . . . . . . . . . . . . . . . . . . 50 2.25. Esquema de un simulador basado en capas . . . . . . . . . . . . . . . . . . 52 2.26. Entorno físico y conceptual de la simulación de tráfico . . . . . . . . . . . 54 2.27. Beneficios por utilizar el algoritmo "Vehicle Traffic Light" en la ciudad de
Porto, Portugal . . . . . . . . . . . . . . . . . . . . . 57 2.28. Diferenciación en el ancho de banda entre CPU y GPU . . . . . . . . . . . 59

2.29. Diferencia de velocidad en Gflops entre CPU y GPU 59 2.30. Arquitécturas CPU y GPU . . . . . . . . . . . . . 60 2.31. Dependencias de ingreso para enlaces verticales . . 62 2.32. Procesamiento en el CPU y GPU a través de CUDA 65 2.33. Proceso de pipeline gráfico . . . . . . . . . . . . . . 67 2.34. Ejemplo de arreglo de administración de nodos . . . 69 2.35. Comparación de aceleración entre los diversos paradigmas utilizados 70
3.1. Esquema del simulador de tráfico . . . . . . . . . . . . . . . . 72 3.2. Esquema de archivo XML . . . . . . . . . . . . . . . . . . . 74 3.3. Muestra de creación de un camino, por medio del archivo csv 78 3.4. Tipos de direcciones en los nodos 79 3.5. Pipeline de ejecución en Open GL 81 3.6. Buffer de vértices en Instancing 83 3.7. Vínculos entre nodos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85 3.8. Vínculos entre nodos, considerando los sentidos 86 3.9. Textura y sus componentes . . . . . . . . . . . . . . . . . . . . . . 89 3.10. Ejemplo del llenado de la textura . . . . . . . . . . . . . . . . . . . 90 3.11. Diagrama de ejecución en CUDA y sus diferentes tipos de memoria 94
4.1. Especificación del movimiento de un solo carril de izquierda a derecha en posiciones (x,y) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.2. Caso de estudio cuando un nodo se encuentra con un nodo de sentido con-trario sin ninguna opción de movimiento . . . . . . . . . . . . . . . . . . . 100
4.3. Resultado de la primera simulación. . . . . . . . . . . . . . . . . . . . . . 101 4.4. Especificación de nodos en posiciones (x,y) en dos carriles con sentidos con-
trarios ............................... . 4.5. Resultado de la segunda simulación . . . . . . . . . . . . . . . . 4.6. Dibujado del camino para el caso del crucero y coordenadas (x,y)
4.7. Imagen I para la ejecución del simulador para el crucero 4.8. Imagen 2 para la ejecución del simulador para el crucero 4.9. Imagen 3 para la ejecución del simulador para el crucero 4.1 O. Imagen 4 para la ejecución del simulador para el crucero
102 103 104 106 107 108 109

LISTA DE TABLAS
2.1. Rendimiento en redes vehiculares de caminos en Estados Unidos
3.1. Formato de archivo csv ....... . 3.2. Formato de archivo csv para el camino 3.3. Archivos XML a cargar
4.1. Nodos tipo crucero y sus enlaces
64
75 77 80
105

, l. INTRODUCCION
La población mundial ha tenido un crecimiento exorbitante comparado con siglos ante
riores, la explosión demográfica muestra cifras que nos dejan ver el incremento de personas
en todo el mundo, tan solo en la última década se ha tenido un crecimiento según el reloj
universal I la cifra de población asciende a 6,897 millones de personas en todo el mundo, un
crecimiento de casi 1,000 millones en la última década.
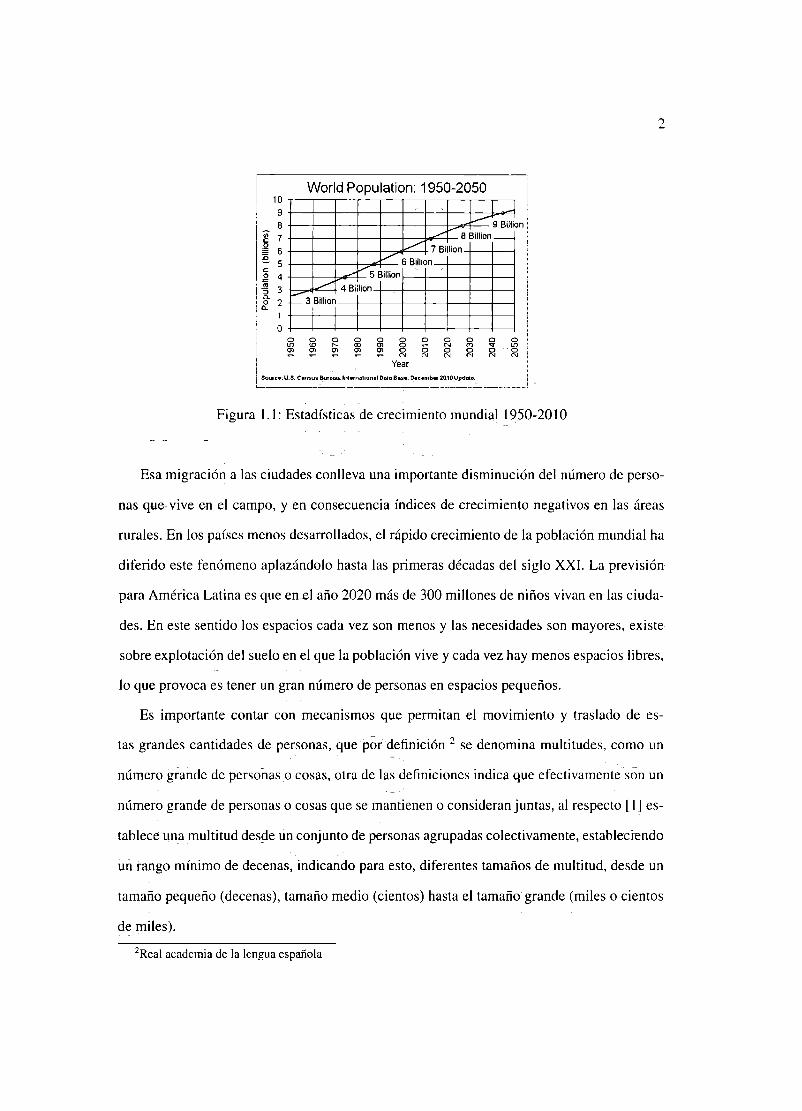
En la figura 1.1 se puede ver e! aumento de la población por década tornado de la agencia
de Censos de Estados Unidos. Gran parte de esta población se encuentra concentrada en las
grandes urbes, a medida que un país se mueve de una economía agrícola a una economía
industrializada se produce una migración en gran escala de los residentes rurales hacia las
ciudades. En este proceso, el índice de crecimiento de las áreas urbanas duplica el índice de
crecimiento global de la población. En 1950, el 29 % de la población mundial vivía en áreas
urbanas, en 1990 esta cifra era del 43 % y para el año 2000 se aumentó a más del 50 %.
1 World Clock 20 I O la organización que lleva las estadísticas de conteo de personas, mortalidad, enfermedades, etc
2
World Population: 1950-2050 10 9
8
J L.--- 9 Billio n
vi 7 e ~ 6 e 5 e o 4 ~ "3 3 a.
2 o CL
----~ BBillion_
-------7 Billion _.,,,--
6 Billion _.,.r 5 Billior> ___,.,
4 Biilion ~ 3 Billion 1
f 1
o o o o 2 @ § o o o o o l.f) <O r-- o N "' "" l.f)
~ ~ ~ ~ ~ o o o o N N N N N N
Year Sou1ce; U.S. C•nsus Bureou. lnte111.11iom1I Data Boso. December 2010Updcllo.
Figura 1.1: Estadísticas de crecimiento mundial 1950-201 O
Esa migración a las ciudades conlleva una importante disminución del número de perso
nas que vive en el campo, y en consecuencia índices de crecimiento negativos en las áreas
rurales. En los países menos desarrollados, el rápido crecimiento de la población mundial ha
diferido este fenómeno aplazándolo hasta las primeras décadas del siglo XXI. La previsión
para América Latina es que en el año 2020 más de 300 millones de niños vivan en las ciuda
des. En este sentido los espacios cada vez son menos y las necesidades son mayores, existe
sobre explotación del suelo en el que la población vive y cada vez hay menos espacios libres,
lo que provoca es tener un gran número de personas en espacios pequeños.
Es importante contar con mecanismos que permitan el movimiento y traslado de es
tas grandes cantidades de personas, que por definición 2 se denomina multitudes, como un
número grande de personas o cosas, olra de las definiciones indica que efectivamente son un
número grande de personas o cosas que se mantienen o consideran juntas, al respecto [ 1] es
tablece una multitud desde un conjunto de personas agrupadas colectivamente, estableciendo
un rango mínimo de decenas, indicando para esto, diferentes tamaños de multitud, desde un
tamaño pequeño (decenas), tamaño medio (cientos) hasta el tamaño grande (miles o cientos
de miles).
2Real academia de la lengua española

1.1 Antecedentes 3
1.1. ANTECEDENTES
Desde a inicios de la década de los 80 se pudo observar el rápido crecimiento de la pobla
ción en espacios pequeños, lo que provocó que los investigadores de la época comenzaron a
realizar trabajos sobre el control y movimiento de multitudes. Forsyth [2] establece que las
multitudes son un grupo grande de elementos que ocupan una ubicación única y que com
parten una meta en especial. Se muestra la clasificación en !a figura 1.2, la cual contempla
los diferentes tipos de multitudes dependiendo el objetivo o razón por la cual los elementos
que pertenecen a la misma se encuentran dentr, así como el comportamiento de las mismas.
Público Cmial
Multitudes
Reuniones
Auditorio o Colas de Audiencia~ espera
Turbas de !incharniento
Turbas <lgre,siv,us
forbas o Grupos
Disturbios Escape o
fuga
Figura 1.2: Tipos de multitudes
P<lnicos
Codicioso
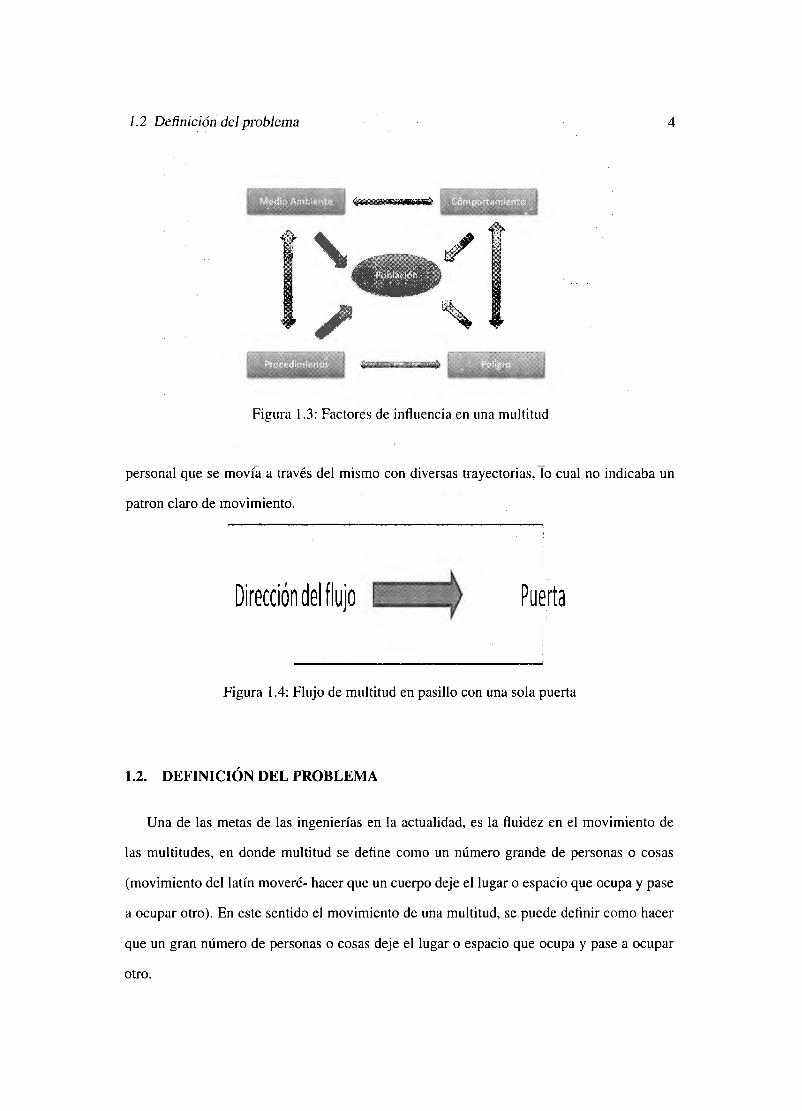
En 1999, Gwyenne f3], establece las diversas variables que influyen sobre la población y
su movimiento, tal y como se muestra en la figura 1.3.
A través de los años se ha investigado en diversas formas a las multitudes, desde su
composición, factores de creación, e inclusive ideologias politicas, sociales y psicológicas
asociadas a la misma, sin embargo, el punto más atacado dentro de una multitud, es su
movimiento, ya sea al interior de la multitud, visto desde el punto de vista microscópico o el
comportamiento de la multitud como un bloque, visto desde el punto de vista macroscópico.
Se describió en 1999 [4] una serie de experimentos al interior de un corredor el cual
contenia una sola puerta de salida, y en el mismo se mostraron diversos comportamientos de
1.2 Definición del problema 4
-
Figura 1.3: Factores de influencia en una multitud
personal que se movía a través del mismo con diversas trayectorias, lo cual no indicaba un
patron claro de movimiento.
Dirección del flujo Puerta
Figura 1.4: Flujo de multitud en pasillo con una sola puerta
1.2. DEFINICIÓN DEL PROBLEMA
Una de las metas de las ingenierías en la actualidad, es la fluidez en el movimiento de
las multitudes, en donde multitud se define como un número grande de personas o cosas
(movimiento del latín moveré- hacer que un cuerpo deje el lugar o espacio que ocupa y pase
a ocupar otro). En este sentido el movimiento de una multitud, se puede definir como hacer
que un gran número de personas o cosas deje el lugar o espacio que ocupa y pase a ocupar
otro.

J .2 Definición del problema 5
Las multitudes como podemos ver pueden estar conformadas por diversos elementos, no
necesariamente personas, vehículos, etc, lo que conlleva a diseñar algoritmos de movimiento
automatizados, que como la definición lo indica, nos permitan realizar el traslado del cuerpo
u objeto de un espacio a otro.
En la actualidad las grandes urbes denotan un crecimiento de integrantes saturado, es
decir, los caminos disponibles, las rutas, las formas de transpo11arse no crecen al ritmo de las
necesidades de movimiento de las personas; es común en la vida diaria observar saturación
en todos los medios de transporte, como parte de la solución diversas ramas se han creado a
partir de otras como el caso de la ingeniería del transporte que maneja :
1. Problema del tránsito y su solución.
2. Transporte e ingeniería de tránsito.
3. Usuario de servicios de transpo11e.
4. Vehículos.
5. Sistema vial.
6. Dispositivos para el control del transito.
7. Volumen del tránsito.
8. Variables de velocidad.
9. Análisis del flujo vehicular.
1 O. Análisis de la congestión vehicular.
11. Capacidad Vial
12. Semaforización.
13. Estacionamientos.

1.2 Definición del problema 6
14. Accidentalidad.
15. Transporte público.
Cada uno de estos temas tienen el propósito de mejorar la forma en la que las sociedades
se mueven, con elementos propios del tránsito de las ciudades o las vialidades, se pretende
atacar el movimiento de las sociedades con instrumentos, caminos, educación, etc. Sin em
bargo se realiza conforme al libre tránsito de cada persona, es decir, se pretende controlar el
flujo de personas con dichos instrumentos sin interferir en sus decisiones o alternativas de
rutas a tomar, solamente se sugiere y en algunos casos como el uso de semáforos se "impone"
A pesar de lo anterior, el factor humano influye directamente en el éxito o fracaso de las
metodologías utilizadas, ya que si los métodos de manejo, las rutas y las decisiones tomadas
por cada una de las personas conlleva a un tránsito denso, ninguna herramienta persuasiva
por parte de los mecanismos de control llegará a buen fin.
Ya que aunque las metodologías a utilizar pueden ayudar, no solucionan completamen
te la problemática derivado a que siempre contamos con el factor húmano en la toma de
decisiones lo cual impacta directamente en el éxito o fracaso de las políticas utilizadas.
Áreas como la robótica pretenden encontrar algoritmos de control de movimiento de mul
titudes de robots. Por definición un robot se declara como una Máquina o ingenio electrónico
programable, capaz de manipular objetos y realizar operaciones antes reservadas solo a las
personas. En este sentido se espera que el movimiento de los robots sea lo más cercano al
de los movimientos en la inteligencia de esquivar obstáculos, trazar trayectorias y manejo de
colisiones.
Dentro de la misma definición se puede observar que se maneja un amplio espectro de
posibles objetos que pueden ser tomados como un robot, de acuerdo al manejo de multitudes
que se pretende en la presente investigación, ya que los algoritmos del manejo de multitudes
puden adaptarse a cualquier máquina que pretenda realizar el traslado de un punto A a un
punto B, calculando sus trayectorias y definiendo el mejor camino posible.

1.3 Objetivos 7
El trabajo de tesis busca realizar una investigación sobre las técnicas, modelos, algorit
mos de manejo de multitudes, etc. con la finalidad de aportar nuevos escenarios o incorporar
modificaciones a los ya existentes con el propósito de ayudar en el manejo de multitudes
dentro de un entorno vial, es decir en tráfico. De la misma forma el trabajo se ocupará de
la animación de los modelos utilizados o propuestos dentro de la investigación con la fina
lidad de realizar el entorno gráfico que nos permita dimensionar los resultados obtenidos
teóricamente.
1.3. OBJETIVOS
Nuestros objetivos dentro del desarrollo de la tesis son los siguientes:
1. Crear un entorno gráfico que se pueda utilizar para el movimiento de multitudes de
vehículos, explorando las capacidades de la taijeta gráfica.
2. Estudiar los diferentes algoritmos/procedimientos de movimiento de vehículos en tráfi
co
3. Estudiar sobre el manejo de colisiones para un conjunto de automoviles dentro de la
animación.
4. Generar la simulación de lo establecido teóricamente.
5. Estudiar los resultados aplicando diferentes casos de tráfico.
1.4. JUSTIFICACIÓN
Es importante contar con herramientas que nos permitan modelar el movimiento de las
multitudes, ya sea que estas multitudes se desplacen de forma personal, es decir, como per
sonas que se mueven por alguna razón, ya sea de seguimiento o por convicción propia, hasta
multitudes de tráfico que se puedan mover fluidamente por los entornos viales.

1 .5 Hipótesis 8
Usualmente el manejo de multitudes provoca lograr las mejores condiciones de movi
miento que puedan tener las mismas o poder conseguir que se puedan trasladar de un punto
A con determinadas coordenadas (:r,y) hacia un punto B establecido, con las mejores condi
ciones de fluidez, tratando de establecer ciertas acciones de acuerdo a decisiones concretas
que se encuentran a cargo de personal de vialidades o tráfico en las ciudades.
Estas decisiones antes de ser aplicadas, deben ser estudiadas y aplicadas con detenimien
to ya que de las mismas depende el impacto a miles de personas o inclusive en entornos
urbanos con tráfico muy denso a millones de personas. Lamentablemente la construcción de
caminos o la incorporación de carriles, cruceros, vialidades implica poder contar con herra
mientas que nos permitan medir las variables asociadas al tráfico antes de aplicarlas, de no
ser así se podrían tener consecuencias negativas en la sociedad a la que se aplican deterio
rando el nivel de vida de las personas o inclusive tener perdidas económicas al interior de las
ciudades.
1.5. HIPÓTESIS
Al estudiar las diferentes investigaciones, enfocadas a un entorno de movimiento vial, se
espera en este trabajo poder establecer un simulador grfico en el cual se puedan dibujar miles
de vehculos generando su movimiento por la tarjeta grfica, los cuales se puedan ejecutar de
forma eficiente con el propsito de que puedan visualizarse los resultados en tiempo real.
1.6. METODOLOGÍA
El documento constará de diferentes capitulas que nos permitirán adentrarnos al desarro
llo del simulador de una forma secuencial, estableciendo en primera instancia el capitulo de
Introducción que nos da un breve panorama de las multitudes así como su interacción con los
entornos viales también de multitudes y explicando la motivación necesaria que nos permita
visualizar la utilidad de contar un simulador de tráfico.

1 .6 Metodología 9
En el siguiente capitulo del Estado del Arte, realizamos un enfoque más profundo a las
investigaciones realizadas en la simulación de multitudes realizando énfasis en los trabajos
relacionados a los simuladores de tráfico, incluyendo diversos trabajos de áreas enfocadas al
estudio del tránsito vehicular.
Una vez que ya hemos obtenido el panorama de lo que se ha desarrollado con respecto
al terna de la tesis, presentarnos nuestra propuesta de un simulador de tráfico explicando
para esto, los diferentes componentes, así como paso a paso ir observando las variables de
entrada, su proceso y la visualización de un simulador gráfico áe tráfico.
Finalmente en el capítulo de Resultados y Conclusiones exploramos tres casos básicos
de movimiento dentro de un simulador de tráfico, tales como el camino en un solo sentido,
doble sentido y finalizando los casos de uso con la simulación de un crucero. En este mismo
capitulo se encuentran los resultados e imagenes de estos tres casos, así como los datos de
simulación y desarrollando las conclusiones del simulador construido así como el trabajo
que se puede desarrollar posteriormente que no se encuentra incluido en la tesis, y como
punto final, la referencia bibliogrífica utilizada.

,I'
2. MARCO TEORICO
2.1. MULTITUDES
2.1.1. INTRODUCCIÓN A LAS MULTITUDES
El desarrollo de multitudes se ha estudiado en diversos campos en gran medida durante
las últimas decadas, áreas diferentes se han interesado por el comportamiento de una mul
titud desde su concepción hasta su movimiento en conjunto, pasando por la agrupación de
sus elementos o miembros tomando en cuenta diversos factores, algunos campos de estudio
interesados en el modelado y estudio de las multitudes han sido la ingeniería ele seguridad,
el diseño arquitectónico y el entretenimiento digital entre otros.
La multitud como tal puede contar un comportamiento diferente al estudiarla desde cada
uno de sus elementos o bien enfocando la misma en un punto de vista general.
La investigación [ I] nos indica que los elementos de una multitud dentro de su comporta
miento usual o normal puede ser afectado por otros en la multitud, lo cual puede depender de
varios factores que pueden ser fisiológicos, psicológicos y sociales. Una observación común
10

2. J Multitudes 11
en un comportamiento humano es que un individuo puede comportarse de manera muy dife
rente en una multitud comparado con su actuar individual.
Dentro de los campos en donde es posible aplicar la investigación de multitudes, el di
seño arquitectónico, puede contemplar desde cuestiones básicas tales como agregar algún
elemento al esquema del inmueble, hasta desarrollar un complejo sistema de evacuación de
un edificio en donde se sahe que pueda reunirse una multitud.
2.1.2. CARACTERÍSTICAS DE UNA MULTITUD
Es importante dentro del modelado y simulación de la multitud puntualizar el tamaño de
la multitud a considerar, tal y como lo indica [ I], el tamaño de una multitud tiene diferentes
clasificaciones y puede consistir de miles o aun cientos de miles(multitud enorme), cientos
(tamaño medio), o decenas(tamaño pequeño) de individuos, clasificación que se observa en
la figura 2.1, obtenida de 1
Del tamaño de la multitud a estudiar corresponderá en gran medida del tipo de enfoque
que se le pueda dar al estudio de la multitud, ya que al ser una multitud enorme o de gran
tamaño se puede estudiar a la multitud como una sola entidad con sus propias características
y reacciones frente a ciertas circunstancias o al considerar una multitud pequeña, se puede
estudiar en particular la interacción entre sus elementos .
• Figura 2.1: Multitudes por tamaño: pequeñas, medianas y grandes
Otra característica de una multitud será la escala de tiempo a utilizar para el periodo
1 hllp://www.photaki.es

2. 1 Multitudes 12
de la medición de la multitud, ya que pueden considerarse reacciones de corto plazo como
en situaciones de emergencia, hasta comportamientos de largo plazo como propagación de
ideologias entre una multitud.
De estas dos características esenciales al modelar y simular una multitud se puede espe
cificar el tipo de enfoque a utilizar. Para el caso de una multitud de largo plazo, usualmente
se utiliza el enfoque de investigadores sociales, ya que normalmente se enfocan en tratar de
visualizar el desarrollo de ideologías, las cuales son diseminadas a través de los individuos
de una población, comunmente este tipo de investigación involucra lapsos de tiempo desde
semanas hasta años.
2.1.3. MODELADO POR TIPO DE MULTITUD
El modelo utilizado para multitudes de largo plazo se establece como una red de inter
acciones entre agentes y cada agente puede ser simplemente caracterizado por su tipo de
opinión y el grado de incertidumbre que un agente puede tener dentro del periodo de tiempo
a estudiar tal y como lo muestra[5], para cambiarla en determinadas circunstancias. de acuer
do a estas características el modelo las contempla como una serie de ecuaciones matemáticas
las cuales dentro de la simulación son muy restringidas a cierto tipo de entornos, es decir,
los modelados de este tipo de multitudes son de tipo específico y no general.
Para el caso de multitudes de corto plazo consideradas de un tamaño grande, el modelo
más usual, ya que es el que se adapta mejor a este tipo de multitudes es el enfoque basado
en flujo, ya que permite tomar a la multitud como una entidad homogenea, la cual responde
a los estímulos del entorno de forma global, es importante mencionar que aunque se toma la
idea de un fluido para especificar el comportamiento de la multitud.
No necesariamente el fluido tiene un comportamiento errático o desordenado, al contra
rio, ya que se conforma por elementos pensantes, el concepto de fluidos pensantes ha sido
ubicado como el tema central a investigar para las multitudes de gran tamaño y con una es
cala de tiempo a corto plazo, las cuales para modelar este tipo de comportamiento describen

2.1 ML1ltitL1des 13
el movimiento por medio de ecuaciones diferenciales, para lo cual elementos estadísticos y
algunas hipótesis de comportamiento son incluidas.
Figura 2.2: Multitud enorme estudiada como un fluido, fotografía real
Figura 2.3: Multitud enorme estudiada como un fluido, simulación en forma de fluido
En la figura 2.2 obtenida de [6] se puede visualizar una multitud de gran tamaño en
un centro religioso, en ella se puede observar una fotografía real de dicha congregación, y
posteriormente en la figura 2.3 el modelado mediante fluidos realizado por un enfoque de
dinámica de partículas.
Al contar con una multitud de gran tamaño los individuos involucrados no son contem
plados como entes separados, al contrario al estudiarlos como un fluido, derivado de su

2.1 Multitudes 14
comportamiento denso, es más factible estudiarlos como una sola masa.
Para el estudio de dichas multitudes se creo por la universidad de Florida el software
EVACNET [7], de acuerdo a las especificaciones del software permite determinar los planes
de evacuación optimos de algún edificio en especifico. La simulación del mismo produce un
resultado óptimo ya que minimiza el tiempo para evacuar el edificio, y el objetivo principal es
evacuar al personal que ocupa el edificio lo más pronto posible, sin embargo dicho software
tiene la reestricción comentada para este tipo de multitudes ya que enfoca su compo11amiento
en el entorno global con velocidades constantes de movimiento de la multitud y no toma en
cuenta comportamientos específicos del mismo.
Existen otros desarrollos como es el caso del trabajo realizado por el VRLab del Instituto
Federal Suizo de tecnología, la cual contempla la animación y trata a la multitud individual
mente para especificar las rutas de movimiento y dividiendo de acuerdo a la cercanía con la
animación por regiones de nivel de detalle para el dibujado de los elementos.
Figura 2.4: Multitud simulada dentro de VRLab
Los resultados de las animaciones realizadas por VRLab contemplan animaciones de
más de 10,000 agentes, los cuales son simulados tal y como lo muestra la figura 2.5 . En esta
figura se puede observar diferentes etapas que dentro del desarrollo del modelo se establecie
ron con el proposito de realizar un modelo de simulación de tráfico lo más eficiente posible,

2. 1 Multitudes 15
utilizando las últimas técnicas de modelado y que contemplan los elementos de dicha figura,
tales como "instancing" que nos permitirá dibujar el mismo modelo miles de veces sin sobre
cargar el proceso de dibujado, "culling" que hace el procesamiento del dibujado únicamente
de los elementos que se encuentran dentro de la vista de la cámara.
D
D Simulation
Update
Figura 2.5: Esquema gráfico de animacion en el desarrollo de VRLab
Las multitudes que tienen un plazo o término de corta duración que involucran multitu
des de tamaño pequeño a mediano son del tipo de multitudes que mas se estudian, ya que
contemplan el elemento del movimiento en masa de una multitud en su totalidad, así como
el estudio en especifico de los individuos.
Existen basicamente dos tipos de enfoques dentro de esta simulación, y que van a de
pender de las reglas de movimiento así como la forma de visualizar a los elementos que
conforman a la multitud.
Los dos tipos fundamentales son el enfoque basado en agentes y el enfoque basado en
entidades, sin embargo, estos dos enfoques no tienen una diferenciacion muy clara, ya que
su comportamiento dentro de la simulacion es muy similar, la principal diferencia se refiere
a la complejidad de los mecanismos de accion de cada uno, mientras una entidad usualmente
tiene un comportamiento homogeneo y genérico, un agente contempla una estructura de
toma de decisiones más compleja, que en ocasiones trata de asemejar en gran medida al

2. 1 Multitudes 16
comportamiento humano, dicha complejidad como se podrá observar mas adelante puede
ayudar en la visualización mas cercana a la realidad de una multitud, sin embargo puede
demeritar en el graficado y procesamiento de información ya que involucra un procesamiento
y poder de cómputo mayor.
El enfoque basado en entidades ha sido estudiado desde el punto de vista de una partícula,
dichas entidades contemplan leyes físicas que permiten estudiar a los elementos dentro de
una multitud como particulas en movimiento. Dentro del comportamiento de estas partículas
pueden aplicarse fuerzas de movimiento o atracción derivadas de factores físicos, sociales y
psicológicos.
Dichas partículas involucran determinados aspectos físicos, tales como masa, velocidad,
fuerza de atracción o repulsión, como se muestran en la ecuación 2.1
. rlv; vf ( t) e\l ( t) - V¡ ( t) . . . rnt- = rn,~-~--- + ¿ .f1J + ¿.f1.'LL'
rft; T j(ii) 11•
(2.1)
Estos aspectos físicos se obtienen de los elementos que establecen el comportamiento del
movimiento de una entidad durante cierto tiempo t con velocidades v; y estableciendo cierta
dirección e, y finalmente sumando las fuerzas de atracción y repulsión que puedan obtenerse
del acercamiento de las partículas.
En las fuerzas que forman parte de la segunda parte de la ecuación se pueden integrar
elementos de comportamiento motivados por factores físicos, sociales y psicológicos. Sin
embargo existen algunos criterios que no pueden ser contemplados por la naturaleza de las
ecuaciones tales como lazos familiares o personalidad de un individuo.
Inclusive dentro de dichos parámetros se pueden establecer criterios como de dependen
cia, ya que el modelar una entidad que dependa de otra para su movimiento es sencillo,
simplemente incorporando una menor velocidad a la entidad, este mismo comportamiento
puede ser aplicado para los patrones de conducción que se pueden ingresar al modelo de
tráfico, ya que no todos los conductores en la vida real lo hacen de la misma forma.

2.1 Multitudes 17
Figura 2.6: Ejemplo de una animación de multitudes con paiticulas en maya
En la figura 2.6 se puede observar una animación de entidades de una multitud conside
radas como partículas.
El siguiente enfoque es el de los agentes, y particularmente el más utilizado de todos los
paradigmas de modelado y simulación de multitudes, principalmente porque se asemejan en
gran medida al comportamiento de un ser humano y contemplan diversas características que
permiten una simulación más cercana a la realidad.
El aspecto más complicado dentro de este tipo de simulacion, y el mas estudiado se
refiere al movimiento de los mismos al interior del entorno, es importante mencionar que
los aspectos a considerar pueden resultar muy complejos, mientras mas complejas sean las
interacciones o las rutas tomadas por los agentes.
Cada uno de los agentes como multitud no necesariamente tiene un objetivo en común,tienen
un punto de origen y una meta ya sea parcial o final, es decir, en el trazado de la ruta puede
que tenga ciertos puntos a donde debe llegar temporalmente y realizar su movimiento casi
inmediatamente. Cada una de estas rutas puede ser preestablecida o en tiempo real, ya que
cada uno de sus agentes al incorporar detalles de inteligencia puede escoger diversas rutas de
acuerdo a una serie de reglas de decisión, las cuales pueden ser muy variadas y complejas.
Reynolds en 1987 [8] estableció tres reglas basicas en el comportamiento de multitudes,
2.2 Simulación de tráfico 18
las cuales al ser los ejes del movimiento de la multitud, con algunas variaciones siguen
siendo consideradas y son la cohesión, separación y alineación, casi todos los trabajos sobre
multitudes incluyen en su totalidad o parte de estas características, ya que el movimiento de
una multitud aunque puede resultar complicado de estudiar es necesario que genere patrones
que mantengan un orden de acuerdo a la separació n entre los agentes, la cohesión de la
multitud en su totalidad y la alineación del movimiento en general de todos los agentes.
Complementando la simulación de los agentes, es importante incluir un periodo de ani
mación gráfica de la misma, ya que es la que permite de una forma visual observar los
resultados y corregir errores inherentes a la simulacion.
En algunas ocasiones no es importante la apariencia del agente, sino el comportamiento
estudiado mediante ciertos criterios y obteniendo los resultados de dicho comportamiento,
diversas aplicaciones como la desarrollada por Crowd Dynamics Pte Ltd establecen algorit
mos de planeación de rutas con el mínimo esfuerzo para minimizar el costo del movimiento
del agente.
Algunos otros trabajos han incorporado un framework llamado ViCrowd [9] el cual tiene
una estructura jerárquica en donde los niveles más altos se denominan grupos que se en
cuentran formados por individuos, dichos individuos de acuerdo a cierto conocimiento de su
entorno pueden planear rutas y evitar colisiones con elementos estáticos y con otros agentes,
dicha herramienta permite tener avatars en 3d para animar la simulación.
2.2. SIMULACIÓN DE TRÁFICO
Para la simulación de multitudes de tráfico es importante considerar los aspectos de simu
lación de multitudes de personas ya que en gran médida el desarrollo y paradigma a utilizar,
ya sea un enfoque macroscópico o microscópico involucra invariablemente el uso de agentes
y como se ha explicado extensamente en las secciones anteriores, la incorporación de reglas
de operación, así como Inteligencia Artificial es imprescindible.

2.2 Simulación de tráfico 19
El uso de técnicas en las que los agentes podrán desenvolverse son críticas e indispensa
bles ya que en la medida en la que los automóviles cuenten con un movimiento fluido dentro
de la simulación, la misma podrá acercarse en gran medida a la realidad.
Como se mencionaba anteriormente la simulación de automóviles puede ser enfocado
desde el punto de vista local, es decir, un automovil involucrando su movimiento y desarrollo
en una región, el cual se podría tomar como una multitud de automóviles pequeña en un
enfoque microscópico.
Al respecto [ l O] estudia el tráfico con un enfoque microscópico, midiendo la cantidad
de emisiones vehiculares que se dan en una determinada intersección, que se establecen por
medio de estándares publicados por la Unión Europea y los Estados Unidos, y que resultan
de la formas de aceleración, paro, y desaceleración de los vehículos en el momento en el que
se encuentran en una intersección.
Contempla cuatro modelos importantes en la simulación de tráfico:
• Modelo de generación de veículos
• Modelo de representación de la red vehicular
• Modelo de control de señales
• Modelo de comportamiento vehicular
Con estos cuatro modelos se realizó una simulacion en una determinada ciudad de China,
tomando como datos lo ocurrido en una hora. Durante este periodo de tiempo una cantidad
de 7,000 vehículos en una hora pico transitaron por la intersección que se muestra en la figura
2.7
Se estableció un mayor énfasis en las características de los autobuses que circulan por el
camino, ya que los automóviles contienen pocas reglas de movimiento, que no simulan en
gran medida el comportamiento de un vehículo real, ya que el movimiento de un vehículo no
es lineal siempre, depende de diversos factores que no entran dentro del alcance del artículo.

2.2 Simulación de tráfico
Jipi Qi.10
BmStop 1
Bm Stop
C'hangjiang RiverBnnk
BmStop
Bus Stop 1 l11t
Raih~ay Station
No.15 Middle School
Bus Stop
Figura 2.7: Intersección simulada de la ciudad de XiaDongMen
20
Así mismo el conjunto de las variables contemplan la emisiones de contaminantes que
estos factores implican, haciendo hincapié en señalar que mientras menos se encuentren pla
neados los movimientos de frenar, acelerar, permanecer detenido, así como la sincronización
de las señales, la contaminación asociada a una intersección aumenta.
Entre los enfoques a utilizar, existe una subdivisión que procura el uso de forma or
denada de los diferentes puntos de vista de simulación establecidos como macroscópicos y
microscópicos, el denominado Modelado de multi resolución (MRM) por sus siglas en inglés
nos permite evitar las limitaciones de estos dos paradigmas y utilizarlos en conjunto.
En este sentido [ 11] explora el uso de esta nueva tecnología y combina las técnicas ma
croscópicas y microscópicas, dentro de un framework llamado UNIFY, ya que permite utili
zar dos diferentes tipos de modelado: el primero que establece un vehículo como una entidad
que solamente depende del automovil que va por delante así como de características propias
de la entidad para realizar su recorrido, y el otro que involucra otras entidades adyacentes a
la que se estudia con el proposito de considerar un sistema más global.
De esta forma propone dos caminos para llevar a cabo la simulación siendo el primero de-

2.2 Simulación de tráfico 21
cicir la velocidad de un vehículo para la relación densidad-velocidad en un vinculo específico
y guardar la información de origen-destino para cada vehículo pero no tornando atención de
dos vehículos adyacentes. El otro es considerar un vinculo corno un sistema de cola-servidor,
es de esta forma que conjuntando estos dos caminos se establece este frarnework.
Es importante considerar que el uso de múltiples variables en un sistema híbrido pue
de implicar un gran poder de cómputo. por lo que es necesario establecer cuales variables
pueden ser consideradas para un mejor desarrollo de la simulación y establecer reglas de con
sistencia de requerimientos a nivel de dinámicas de tráfico, representación de la red vehicular
y la consistencia del ciclo de simulación.
El diagrama de la interacción de las redes micro y macroscópica se puede observar en la
figura 2.8
Macro/Meso Nctwork
Figura 2.8: Visualización de una red micro y macroscópica
2.2.1. MOVIMIENTO DE VEHÍCULOS
Existen diversos trabajos que han explorado la forma en la que los vehículos se mueven
dentro de su entorno al ser conducidos con diferentes tipos de comportamiento, se ha identi
ficado en gran rnédida los factores que inlluyen en el movimiento sincronizado o en algunas
ocasiones caótico de los automóviles.

2.2 Simulación de tráfico 22
Los vehículos mantienen particularidades que los alejan del movimiento de una multitud
de génte, inclusive algunos autores han explorado el modo en el que se pudiera automatizar
el movimiento que hace un conductor al estacionar su automovil, ya que se encuentran una
serie de pasos recurrentes en la forma en la que se realiza este movimiento.
En este campo Dirk Helbing ha explorado diversas variables matemáticas que nos ha
blan, sobre como el movimiento de un vehículo se puede dar por determinados patrones de
movimiento que se dan a lo largo de la simulación de tráfico, para lo cual ha publicado di
versas investigaciones que explican con ecuaciones numéricas o en forma de simulación, la
interacción de los vehículos.
Tal es el caso de [ 12], en donde nos da un enfoque numerico de las simulaciones ma
croscópicas dentro del tráfico, estableciendo el uso de ecuaciones diferenciales parciales o
"PDE" por sus siglas en inglés, las cuales sin embargo son inestables numericamente, de
rivado del tipo de discretización que se utiliza en tiempo y espacio, inclusive con variables
pequeñas que nos permitirían un menor margen de errores para este tipo de ecuaciones.
De acuerdo a lo publicado por [ 13 ], las ecuaciones diferenciales parciales son las que
contienen una diferencial parcial para una función determinada con diversas derivadas par
ciales de acuerdo a la ecuación 2.2
F(:r:, y ... , u, u,r, uy, H:r:r, uyy, ... ) = O (2.2)
Estas ecuaciones parciales de la función F se tendrá un número finito de derivadas, en
donde una función de acuerdo a 2.3
u(:r, y, ... ) (2.3)
Es la solución de la primera ecuación, si en alguna región del espacio de sus variables
independientes, la función y sus derivadas satisfacen la ecuación identicamente en x,y.
Y tal y como ocurre en la teoría de las ecuaciones diferenciales ordinarias una ecuaciín

2.2 Simulación de tráfico 23
diferencial parcial es de orden n, si las derivadas de mayor orden que ocurren en F son de
orden n. Las ecuaciones diferenciales parciales se clasifican también según el tipo de función
F considerada.
En particular se tienen la ecuación diferencial parcial lineal si F es lineal en la función
incógnita y sus derivadas, la ecuación diferencial parcial casi-lineal que es más general, si F
es lineal en al menos una de las derivadas de más alto orden. Como lo comenta este trabajo,
las ecuaciones diferenciales parciales se encuentran en diversas cuestiones de la vida real, y
una de ellas es la simulación macroscópica del tráfico.
Para el caso de las soluciones numéricas asociadas al tráfico, con el punto de vista de
PDEs se requieren de métodos que corren bajo ciertas condiciones, las cuales se basan en la
ecuación 2.4
ríp rí(pV) + ---:- + -. - = + - v - (:r, t) M, 61;
(2.4)
En donde la primera p se refiere a la densidad vehicular que se tiene por carril en la
posición :r, en el tiempo t, incorporando mediante la variable V otro elemento muy impor
tante dentro de la simulación de tráfico refiriendose a la velocidad promedio del Vehículo.
De acuerdo a esta ecuación el cambio temporal de la velocidad es dada por el cambio en el
espacio, establecido por el tráfico, y que el movimiento del vehículo será denotado en la me
dida del movimiento del vehículo, considerando el aspecto de que se pueden tener elementos
que aumenten o disminuyan la velocidad (por ello la incorporación de los signos +-) tales
como rampas, de ascenso/descenso, o inclusive caminos de gran velocidad.
Para describir el tiempo y el espacio dentro del tráfico por incorporaciones o el tráfico
que es derivado del paro-avance, se necesita una ecuación dinámica de velocidad, para la
mayoria de los modelos continuos puede darse de acuerdo a la ecuación 2.5
óp <5V r5P l - + V-. = -1- + -(Ve - V) ól ó:r c)J; T
(2.5)

2.2 Simulación de tráfico 24
De acuerdo a esta ecuación el cambio de la velocidad promedio del vehículo se encuentra
dado por tres terminos:
• a) Termino de transporte. Se encuentra dado por la propagación de la velocidad a través
de los vehículos.
• b) Termino de presión. Refleja si una anticipación de los cambios en el espacio dados
por la situación de tráfico o los efectos de dispersión provocados a la variación de la
velocidad de los vehículos.
• c) Termino de relajación. Describe la adaptación de los conductores al flujo vehicular
de acuerdo a una velocidad de equilibrio.
También nos muestra datos estadísticos del tráfico que de acuerdo a estas ecuaciones
pueden ser estudiados, por ejemplo la cuota de salida promedio es alrededor de 200 vehículos
por kilómetro por carril, sin embargo depende de muchas variables y no siempre se tiene el
mismo resultado.
El enfoque dado para este trabajo se encuentra en la relación que tiene el movimiento
basado en la cinética de los gases, aplicado a la simulación del tráfico, para lo cual se ha
establecido una simulación que estudia la interacción vehicular en terminos del modelo de
cinética de los gases, con grandes similitudes. Tomando como cambios en el movimiento
de los gases, algunas comparaciones idénticas en el caso de la amplitud que se tiene para el
cambio de la densidad vehicular y en términos de la propagación.
Otra particularidad establecida en este trabajo es la forma en la que se compara la dis
tancia mínima entre lo vehículos, de acuerdo a la propagación que se da en las partículas de
gas.
Finalmente se muestran los resultados de utilizar diferentes métodos de discretización
utilizando como enfoque, la cinética de los gases de acuerdo al movimiento del tráfico, tal y
como se muestra en la figura 2.9.

2.2 Simulación de tráfico
p rveh1c\es,'km)
60
40
20
o 2
10
p (vehic\es,km)
60
40
20
o
p (vehic\es,'llmj
10
Figura 2.9: Resultados del enfoque basado en el movimiento de gas para el tráfico
25
Dentro de la misma línea de investigación encontramos [ 14], el cual enfoca su estudio
en la validación de la simulación de tráfico por medio de un modelo estocástico del flujo
de tráfico, por definición [ 15] [ 16] un proceso estocástico se se define como un espacio de
estados S es una colección de variables aleatorias de acuerdo a la ecuación 2.6
X 1,t ET (2.6)
Los cuales se encuentran definidos en en el mismo espacio de probabilidades establecido
en la relación 2. 7
ft,F,P (2.7)
La variable T es definido como el conjunto de parametros, si este conjunto se encuentra

2.2 Simulación de tráfico 26
dentro de los números naturales, el proceso se convierte en un proceso de parámetros discre
to. Pero si T no es contable el proceso se encuentra dentro un parámetro continuo. El indice
t representa el tiempo, y un objeto del conjunto X es un estado o posición del proceso en
un tiempo t. En general siempre que se intenta realizar prediciones sobre el comportamiento
futuro de un módelo teórico, utilizamos un proceso estocástico, ya que se utilizan variables
aleatorias de un conjunto para predecir dicho compo,tamiento.
En primera instancia [ 14] menciona que es imprescindible contar con herramientas de
este tipo, es decir, estocásticas para utilizarlas dentro de un simulador de tráfico. Dicha inves
tigación hace hincapie en la reducción de productividad en la que impacta el tráfico, siendo
una fuente permanente de reducción de recursos. El 32 % del tránsito en Estados Unidos se
realiza bajo un entorno congestionado que causa pérdidas por 87.2 billones de dólares, más
del 50 % que la decada anterior.
Para lo anterior se han utilizado Sistemas Inteligentes de Transportación (ITS por sus
siglas en inglés), para los cuales se toman datos de tráfico en tiempo real para apoyo y
predicción de tráfico. Cada vez se han obtenido más formas de ingresar datos de tráfico,
que se encuentran disponibles a través de diversos dispositivos, que han permitido generar
bases de datos que se han podido utilizar por la comunidad científica para la investigación
del tráfico.
ESte trabajo [ 14] propone una ecuación diferencial parcial de tipo estocástico, que cap
tura la variación en el tráfico del tiempo y el espacio. El cual inclusive se puede utilizar para
la construcción de bloques de edificios o elementos de la urbe que permitieran un mejor
flujo de tráfico. Las funciones matemáticas asociadas al trabajo, se enfocan en el modelo
LightHill-Whitham-Richards (LWR), el cual consiste en dos ecuaciones, la primera de ellas
es derivada de la ley de conservación que establece que la diferencia entre el flujo entrante y
el flujo saliente de una celda es igual al incremento de los vehículos en una celda y la segunda
que se llama la relación fundamental entre la densidad ( el numero de vehículos por unidad
de distancia) y el volumen (por ejemplo el número de vehículos pasando por una unidad de

2.2 Simulación de tráfico 27
tiempo en un lugar (:i:,y) en un tiempo t. En la figura 2.1 O se puede observar una gráfica del
modelo LWR, estableciendo la densidad.
lTrl
Figura 2.10: Ejemplo de un modelo LWR, mediendo la densidad mediante las variables de tiempo y velocidad
Así mismo se establecen funciones de velocidad-densidad que permite establecer un pro
medio de estos dos elementos de acuerdo a diferentes tipos de camino, en este mismo sentido
el modelo estocástico se acopla a la información de Google Map. Los datos de tráfico, tales
como el conteo de vehículos y la velocidad, se mide cada minuto desde diferentes puntos.
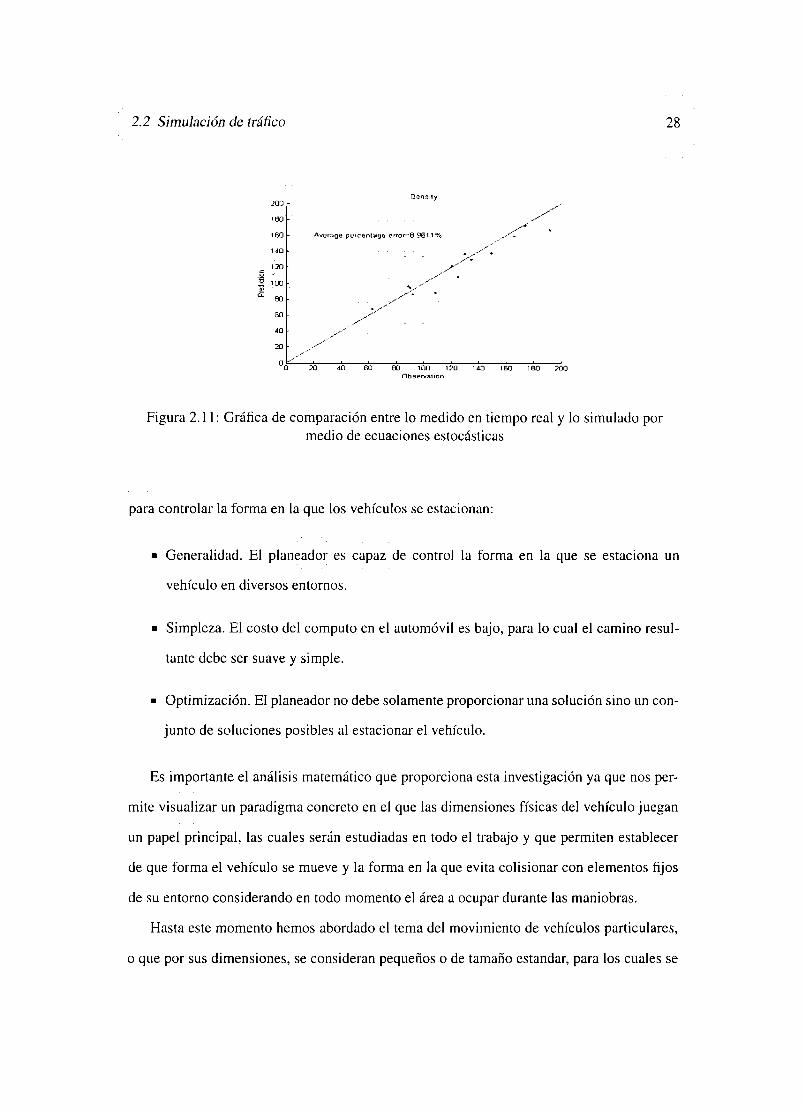
Despues de diversos criterios, se obtuvo la gráfica mostrada en la figura 2. I O, la cual nos deja
visualizar un 8.96 % de error, entre lo medido en la realidad y lo estipulado en las ecuaciones
estocásticas.
Otro de los trabajos, hablando sobre movimiento de vehículos 117 J se refiere a la forma
en la que los automóviles pueden ser controlados al estacionarse en entornos estrechos, este
algoritmo especificado establece una serie de sensores o escaner que nos permitan identificar
el entorno en el cual el vehículo será estacionado, de esta forma se generan trayectorias
y señales al automóvil con el proposito de que se pueda estacionar sin interacción con el
conductor y de forma segura.
La investigación propone tres aspectos importantes y prioritarios dentro de su algoritmo
2.2 Simulación de tráfico
e .g
200
180
160
UD
120
~ 100
~ 90
50
40
20
Den~ity
Avcr:::ige pcrcf::nt:;191;,: crror8 9611 %,
o/ o 20 ~ m oo 100 120 1m 1m 100 200
Obs@Nalion
Figura 2.11: Gráfica de comparación entre lo medido en tiempo real y lo simulado por medio de ecuaciones estocásticas
para controlar la forma en la que los vehículos se estacionan:
28
• Generalidad. El planeador es capaz de control la forma en la que se estaciona un
vehículo en diversos entornos.
• Simpleza. El costo del computo en el automóvil es bajo, para lo cual el camino resul
tante debe ser suave y simple.
• Optimización. El planeador no debe solamente proporcionar una solución sino un con
junto de soluciones posibles al estacionar el vehículo.
Es importante el análisis matemático que proporciona esta investigación ya que nos per
mite visualizar un paradigma concreto en el que las dimensiones físicas del vehículo juegan
un papel principal, las cuales serán estudiadas en todo el trabajo y que permiten establecer
de que forma el vehículo se mueve y la forma en la que evita colisionar con elementos fijos
de su entorno considerando en todo momento el área a ocupar durante las maniobras.
Hasta este momento hemos abordado el tema del movimiento de vehículos particulares,
o que por sus dimensiones, se consideran pequeños o de tamaño cstandar, para los cuales se

2.2 Simulación de tráfico
a b
Figura 2.12: Planeación de ruta de movimientos para controlar la forma en la que un vehículo se estaciona
29
encuentran establecidas la mayoría de las investigaciones realizadas por tráfico, sin embargo
existen varias aspectos aun por considerar, tal es el caso de las vialidades, es decir los cami
nos por donde van a transitar lo vehículos, así como el movimiento para vehículos de mayor
tamaño, tal es el caso de camionetas de gran tamaño, autobuses, o inclusive trailers de carga.
En este sentido [ 18] estudia la forma en la que los trailers realizan sus movimientos,
centrandose en el movimiento hacia atras, y que en muchas ocasiones se necesita realizar,
ya que la mayoria de las veces las descargas de estos vehículos se realizan de atrás hacia
adelante.
Dicho trabajo, establece un algoritmo que permite el movimiento hacia atrás de forma

2.2 Simulación de tráfico 30
estable y seguro de un trailer con 5 remolques, en una planeación de la ruta o el camino que
evita obstáculos y que de acuerdo a sus resultados, tiene un buen desempeño en la vida real.
En la figura 2.13 el simulador, entregó los resultados que se pueden observar, con el control
del movimiento hacia atrás del algoritmo propuesto.
C)Obst acle Sta r t
Goal
Figura 2.13: Resultado final de las pruebas de movimiento hacia a tras con 5 remolques en un trailer
2.2.2. AUTOMATIZACIÓN Y SIMULACIÓN DE TRÁFICO
La investigación del movimiento de un vehículo puede estar contemplada en dos cuestio
nes básicas: la primera se refiere a la visualización del movimiento propio del automóvil, en
la que pueden estar presentes características tales como el tipo de manejo, la acumulación del
tráfico, patrones de estancamiento, entre otros. Esto es que se refiere a estudiar como el ser
humano realiza el manejo de los automóviles y su interacción con los diferentes elementos
del tráfico, tales como otros conductores, señales de tránsito, agentes de tránsito, semáforos.
Sin embargo existe otra área de investigación, explorada en gran medida por la robótica,
y se refiere a la forma en la que un robot de tipo automóvil o vehículo, 'car-like robot" por

2.2 Simulación de tráfico 31
su término en inglés, se mueve, desde los aspectos mecánicos, sensores, hasta su interacción
con el entorno, tipos de movimiento, etcetera.
Figura 2.14: Ejemplo de un dispositivo car-like robot
Estos dispositivos electro-mecánicos son un conjunto de instrumentos físicos de hard
ware que permiten al robot interactuar con su entorno y que establecerán las variables de
entrada, tales como definición de obstáculos, caminos o rutas preestablecidos en el entorno,
cercanía con otros agentes o robots. Este hardware se encuentra diseñado con el propósito de
dotar al robot de las herramientas que le permitan obtener información a través de la ejecu
ción de sus tareas.Así mismo es importante para la forma en la que genere salidas tales como
encender las luces, mover los dispositivos mecánicos, activar sensores, etcétera.
Sin embargo entre la entrada y la salida se encuentra el procesamiento de todos los datos,
ya que del ingreso de las variables del entorno, de acuerdo a ciertas condiciones, máquinas
de estado finito, algoritmos genéticos, entre otros algoritmos, se realiza la toma de decisiones
de acuerdo a la forma en la que esta programado el dispositivo.
En este sentido, investigaciones como [ 19] establecen mecanismos mediante los cuales
estos robots manejados como automóviles son configurados para moverse en su entorno de
acuerdo a los cambios de trayectoria que estan estrechamente involucrados con los compo
nentes mecánicos, para lo cual el robot modelado contempla su postura como una ecuación
de cuatro elementos, tal y como se muestra en la ecuación 2.8

2.2 Simulación de tráfico 32
[r,y,0. K] (2.8)
Los primeros dos elementos se refieren a la posición del robot, que como se puede ob
servar es denotada por dos dimensiones, la variable f/ se rctiere a la orientación del robot y
finalmente 1; contempla la curvatura en determinada posición, de acuerdo a estos elementos
se genera un polinomio con curvatura cubica el cual establecido en estos datos, se puede
observar como un polimonio curvo de orden cuarto.
Existen algoritmos para espacios de dos dimensiones, los cuales funcionan sin incorporar
el manejo de los sistemas físicos que se dan dentro de una simulación de tráfico. En el mo
mento en el que se empiezan a considerar otros factores y ocupamos más de dos dimensiones,
el cómputo asociado a la ejecución y rendimiento se vuelve complicado.
Sin embargo esta investigación establece un mecánismo, mediante el uso de conside
raciones físicas y estableciendo ecuaciones de estado las cuales son como lo muestran las
relaciones2. 9, 2.10 , 2.11 y 2.12
:1: = V(t)cos(O(t)) (2.9)
y= V(t)súi(0(t)) (2.10)
0 = K(t)V(t) (2.11)
K = a(t)/L (2.12)
Siendo los valores no mencionados anteriormente el referente a V para la velocidad li
neal, o la velocidad angular, t para el tiempo y L para la base de la llanta.

2.2 Simulación de tráfico 33
Estableciendo estos y algunos otros parametros se realizó la ejecución en robots propie
tarios de la empresa Toyota, procesando diferentes tipos de ruta y obstáculos en el camino
del robot, lo que mostró como resultado un tiempo rápido, usualmente menor a los 40ms que
permite un huen acoplamiento con un control en tiempo real.
Otro de los trabajos realizados en este mismo sentido [20] incorpora la verificación del
resultado de los movimientos que realizan los robots dentro de la búsqueda del camino libre
de obstáculos o de manera más eficiente.
Dicho trabajo establece los movimientos del robot de forma suave, ya que se pretende
que cada uno de los robots que realiza su labor dentro de un entorno común y corriente
deberá asegurar que sus movimientos sean lo menos bruscos posibles, esto con el propósito
de no generar un impacto negativo en la vida de las personas, ya que de no ser así puede
implicar un riesgo potencial para su medio ambiente.
Así mismo la mayoría de los trabajos de investigación contemplan el movimiento de los
robots como automóviles, siendo agentes que buscan llegar a su meta, sin importar el costo
generado a través de cada uno de los pasos que el robot realiza en cada ciclo, sin embargo en
[20] se estudian los costos asociados a una meta.
Mediante el algoritmo A* implementado en la citada publicación se busca obtener el me
nor costo de las soluciones posibles, sin embargo, para el caso de dicho algoritmo usualmente
el movimiento suave, explicado como uno de los ejes de esta investigación no es encontrado
en un algoritmo A* que no contemple algún tipo de modificación, por lo que al interior del
artículo se exploran posibilidades de lograr un movimiento suave y continuo utilizando A*.
Lo importante para lograr el resultado esperado, de acuerdo al trabajo establecido por
Yumiko en 2006, es incorporar movimientos pequeños, en cada paso de la simulación, que
nos da la ventaja de contar con un movimiento más suave, sin embargo esto no es pósible
con el algoritmo clásico A*, para lo cual se utiliza el algoritmo A* dinámico que establece
sus vectores de forma más suave, ya que son combinaciones de líneas rectas.
Para buscar dentro de la rejilla bidimensional de celdas, es necesario establecer un arbol

2.2 Simulación de tráfico 34
de búsqueda estático con un inicio y una meta, a través del cual se obtendrán los datos que
nos permitirán escoger una rama a ser explorada detalladamente.
Como puntos básicos de movimiento o conjunto de direcciones de manejo, de acuerdo al
nombre que le da la publicación, se toman los movimientos de comportamiento como "linea
recta o continuar derecho", "dar vuelta a la derecha", "dar vuelta a la izquierda". Con estos
tres elementos se construye un arbol de busqueda.
Posteriormente se construyen curvas utilizando curvas spline, que se refiere a las curvas
que tienen interpolación o que se pueden ver como una curva continua, pero que en realidad
cuenta con porciones polinómic3s unidas entre si, un ejemplo común de estas curvas son
las curvas de Bezier que se puede visualizar en la figura 2.15 obtenida de 2, las cuales
mediante un punto origen y destino se conectan estas dos coordenadas y de acuerdo a puntos
de control, se diagrama la curva de bezier .
midpoint 3 l midpoint 4
ending point
/ context point
Figura 2.15: Curva de Bezier
Se tienen diferentes rejas de celdas que establecen los valores a utilizar durante la eje
cución, las cuales se manejan en dos dimensiones, una de las rejillas guarda los costos para
cada una de las celdas y la se utiliza como bandera de verificación con el propósito de ubi
car para finalizar la búsqueda de ramas a través de la misma celda o de una anterior rama y
así ubicar la ruta completa.
Se realiza una búsqueda por medio de las celdas, para obtener la ruta desde el inicio
2http://www.html5canvastutorials.com/tutorials/html5-canvas-bezier-curvcs/

2.2 Simulación de tráfico 35
hasta el final, ya que dentro de las celdas se va marcando la que la precede, su celda padre u
origen, así mismo se realiza distancia euclidiana para el cálculo heurístico de la meta, y de
acuerdo a una lista se van obteniendo los candidatos a escoger para continuar con el conjunto
de direcciones y el planeador escoge el costo mínimo, así como el siguiente nodo de la lista.
Como parte de los resultados el artículo publica que se realizaron cambios en la longi
tud de la línea recta hacia donde se mueve el robot al realizar las mediciones, las primeras
mediciones se daban con la unidad y posteriormente finalizaban con una magnitud de 11,
obteniendo que el tiempo se incremente al tener mayores magnitudes de líneas que indican
movimiento hacia adelante.
También se pudo obtener que el cambio en los angulas no cambia en gran medida el
tiempo obtenido de respuesta. Al final se pudo observar que se encontró en más ocasiones
el camino más corto con lineas más cortas de movimientos y con angulas más pequeños de
conjunto de direcciones, en la siguiente figura se puede observar la imagen de la combinación
de diferentes ramos con sus angulas, así como longitudes de líneas de movimiento recto.
1 /,
\~\!if,11";'---,., 11 I 1 1 ]
,- : !i 1 1 .. - J._,_ -
Figura 2.16: Diferentes ramificaciones con longitudes y angulas variados
En cuanto a la automatización, se ha buscado cada vez más y más que las herramientas
tecnológicas con las que cuenta la población sean utilizadas en apoyo al movimiento de las
personas y a la interacción que tienen en todo sentido con la necesidad de trasladarse, ya sea
en vehículos particulares o vehículos de transporte público.

2.2 Simulación de tráfico
Los dispositivos como los Sistemas de posicionamiento global "GPS" por sus siglas en
inglés, permiten realizar el seguimiento o "tracking" de los vehículos a través de las redes de
tránsito, inclusive crear herramientas de visualización de tráfico en tiempo real.
Otros de los dispositivos que se pueden tomar como dispositivos de entrada de datos,
pueden ser sensores, los cuales nos permiten conocer el nivel de congestionamiento de las
vialidades, y mandarlo a centrales de control de tráfico, que a su vez publica los resultados
para que el público en general conozca el estado del tráfico y conocer los puntos de conflicto.
El conocer los datos que arrojan las mismas vialidades en tiempo real es de suma impor
tancia, ya que permite inclusive modificar patrones de control de tráfico, inclusive como se
menciono en el marco teórico el manejo de semáforos dinámicamente por medio de ingreso
de datos que permitan diversificar los tiempos de la luz roja y verde en las intersecciones,
ayuda en gran medida a que la densidad de automóviles pueda fluir de mejor forma dentro
del entorno de la cuidad.
Inclusive algunas investigaciones como [21 J exploran la capacidad de ingresar datos por
medio de smartphones, ya que mencionan que es complicado para todas las agencias de
transito dentro de las urbes poder contar con dispositivos como sensores a ciertas distancias
o inclusive dispositivos de seguimiento en cada uno de los vehículos de transporte público.
Indican que el seguimiento de los autobuses de transporte o de trenes subterráneos ha
sido ampliamiente aceptado por los usuarios de estos servicios, ya que les permite conocer
en tiempo real, con una gran certeza el periodo que tendrán que esperar al siguiente autobús,
o el tiempo promedio del ciclo completo de cada uno de los elementos que intervienen dentro
del proceso.
Sin embargo, como se menciona no todas las agencias han podido incorporar elementos
de seguimiento o monitoreo, derivado a falta de recursos ya que implica un gasto que no
todas las agencias pueden absorber, a pesar de esto, la investigación de [2 l J, establece un
nuevo paradigma, en el que los usuarios que ingresan a una aplicación por medio de su
smartphone, e ingresan a un autobús, cooperan con el sistema completo a modo de sensores.

2.2 Simulación de tráfico 37
Los smartphone particulares envían los datos al sistema con el propósito de ser proce
sados, ya que uno de los puntos imprescindibles de los agentes móviles es su bajo nivel de
procesamiento comparado con una computadora personal, un servidor y en conjunto con una
base de datos, por lo que los datos son enviados al servidor central, el cual analiza todos los
datos ingresados y entrega los resultados de predicción de llegadas.
El procedimiento busca en gran medida o en su totalidad ser completamente automático,
por lo que se enfrentarán a diversos retos, como el hecho de buscar la forma de conocer
cuando un usuario realmente subió a un autobús, un taxi o simplemente se encuentra cami
nando, con el apoyo del GPS y de diversos algoritmos se puede conocer los datos necesarios
para el sistema y poder contribuir al seguimiento del transpo1te sin necesidad de contar con
una gran cantidad de recursos.
En la figura 2.17 podemos ver el diagrama del sistema de seguimiento de llegadas,
utilizando los smartphone como ingreso de datos.
local transit tracking software on smartphone ,- - - - - - - - - - - - - - - - - - - - - - - - - - l
spalio-temporal rnatching
transit schedules
underground transit
tracking
\ 1
1+---------''. GPS \ 1
enable
vehicle iclentity anci locatio11
activity classifier
privacy lilter
proxy vehicle GPS trace
-------------------------J
central server ,---------------1
official transit schedules
arrival predictions
Figura 2.17: Sistema de seguimiento de llegadas de autobuses, utilizando smartphones
La comunicación intervehicular también puede darse por medio de redes inhalámbricas
que permitan a los automóviles intercambiar datos que puedan ser útiles en el movimiento

2.2 Simulación de tráfico 38
de los mismos, así como de los conductores.
Como lo muestra [22], la comunicación entre automóviles puede permitir un mayor ma
nejo del tráfico, esta comunicación se centra en comunicación inhalámbrica que permite tres
aspectos en concreto para los vehículos dentro del tráfico:
• a) Seguimiento dentro del tráfico
• b) Información por anticipado para el trayecto
• c) Sistemas de asistencia de manejo o conducción
Contrastando con los algoritmos de verificación con alguna central, estas redes de vehícu
los denominadas VANETs "Vehicular ad hoc Networks" no necesitan de un procesamiento
o nodo central de comunicación ya que se centran en el intercambio de información entre
automóviles, mediante protócolos ya establecidos y utilizando dispositivos específicos insta
lados en los vehículos, sin necesidad de una infraestrúctura pública.
Sin embargo existen algunas reestricciones que deben ser consideradas por la mayoría
de algoritmos que pretendan utilizar una VANET, tal como el porcentaje de los vehículos
que cuentan con dispositivos que permitan esta comunicación que es en promedio debajo del
1 O% en países desarrollados, así como el pequeño rango de comunicación o espacio para
intercambio de información. Estas redes VANET se encuentran ampliamente investigadas en
la actualidad ya que se piensa que pueden ayudar en gran medida el desarrollo de cuestiones
de tráfico.
De acuerdo al algoritmo publicado el trabajo antes mencionado no es necesario contar
con un gran número de dispositivos para lograr una buena comunicación, ya que se cuentan
con dos estrategias básicas de intercambio de información vehicular:
• a) Salto Longitudinal.
• b) Salto Transversal.

2.2 Simulación de tráfico 39
En el primer tipo de estrategia el salto longitudinal se refiere al intercambio de infor
mación que se da en el mismo carril, poniendo un ejemplo, encontramos a un automóvil en
un cruce y cuenta con un dispositivo de comunicación que le permita intercambio de datos
mediante una VANET, este automóvil envía información relevante a los automóviles que se
encuentran dentro del misma vía o camino! y en la misma dirección, el mensaje deberaá ser
envíado a algunos cruces anteriores con el propósito de ser útil y anticipar circunstancias.
Lo que sucede es que el vehículo envía la información al siguiente vehículo que se en
cuentra en el rango de vista del mismo y así suscesivamente hasta que llega a su destino al
gunas intersecciones antes, sin embargo, este tipo de comunicación se encuentra superditado
a siempre encontrar un vehículo que pueda retransmitir el mensaje a uno anterior y así hasta
llegar al destino, y dentro de este proceso se puede obtener perdida, ya que la dinámica en
el tráfico es muy variable y como se comento anteriormente es muy bajo el porcentaje de
vehículos que cuentan con los dispositivos de comunicación apropiados.
La segunda estrategia que es en donde se enfoca más la investigación habla sobre el salto
transversal, que ocupa el otro sentido, es decir los vehículos que vienen en dirección contraria
al vehículo que prelende enviar el mensaje, para lo cual el vehículo en el otro sentido guarda
la información y la replica hasta que encuentra un destinatario en el sentido del vehículo que
envío el mensaje con el fin de que sea útil.
Cada una de estas estrategias cuentan con ventajas e inconvenientes. Una de las prin
cipales desventajas para el salto longitudinal se encuentra en que el mensaje puede fallatar
cuando la distancia entre equipos es mayor o llegar y resultar obsoleta cuando el destinatario
final la pueda leer, sin embargo esta problemática se resuelve con el salto transversal, ya que
es cuestión de tal vez un tiempo más corto por que se utiliza la propia dinámica del vehículo
que lleva el mensaje, sin embargo cuenta con dos reestricciones principales, la primera cues
tión se refiere a un punto técnico, ya que como se explico anteriormente el rango de amplitud
de la comunicación de las VANET es limitado, por lo que derivado de la velocidad de los
automóviles no se puede concretar el mensaje. La segunda restricción se refiere al posible

2.2 Simulación de tráfico 40
cambio de ruta o trayectoria que puede tener el vehículo mediante el salto transversal.
Enfocandose en el salto transversal, ya que son menores sus saltos de información y la
probabilidad de finalizar la transmisión es mayor, se consideran tres etapas principales:
1. Una vez que el mensaje es generado por un vehículo equipado, el mensaje es reenviado
continuamente por este vehículo por un cierto tiempo, hasta que se encuentra con otro
vehículo equipado en el carril opuesto en un intervalo de tiempo.
2. El mensaje es enviado desde el vehículo origen por un salto transversal al vehículo del
carril contrario en un tiempo 2.
3. Finalmente el mensaje es guardado por el vehículo del carril opuesto y envíado a un
vehículo equipado del mismo carril que el primer remitente, y replicado por los au
tomóviles del mismo carril hasta que se considere obsoleto.
De acuerdo a lo anterior se obtienen tres tiempos que pueden ser consideradas como
variables estocásticas derivado de las dinámicas de los vehículos. Finalmente el módelo
analítico del trabajo se centra en una autopista o camino bidireccional con cuatro carriles
por sentido y manteniendo ciertas velocidades y densidades de comunicación. En la figura
2.18 se encuentran los resultados de los análisis matemáticos resultantes de los brincos que
se dan en la intercomunicación.
Dentro de la automatización del movimiento de automóviles existen estudios que investi
gan la forma en la que un automóvil sigue a otro, durante una ruta que mantiene el líder y se
asume que existe otro vehículo detrás que mantiene la misma ruta con algunas restricciones.
Tal es el caso de [23], el cual explora la posibilidad de un automóvil que sigue a otro
en su trayectoria, lo cual permite conocer en mayor medida la dinámica del movimiento de
los automóviles bajo ciertas circunstancias y no solamente en línea recta, sino también en
movimientos de vueltas laterales.
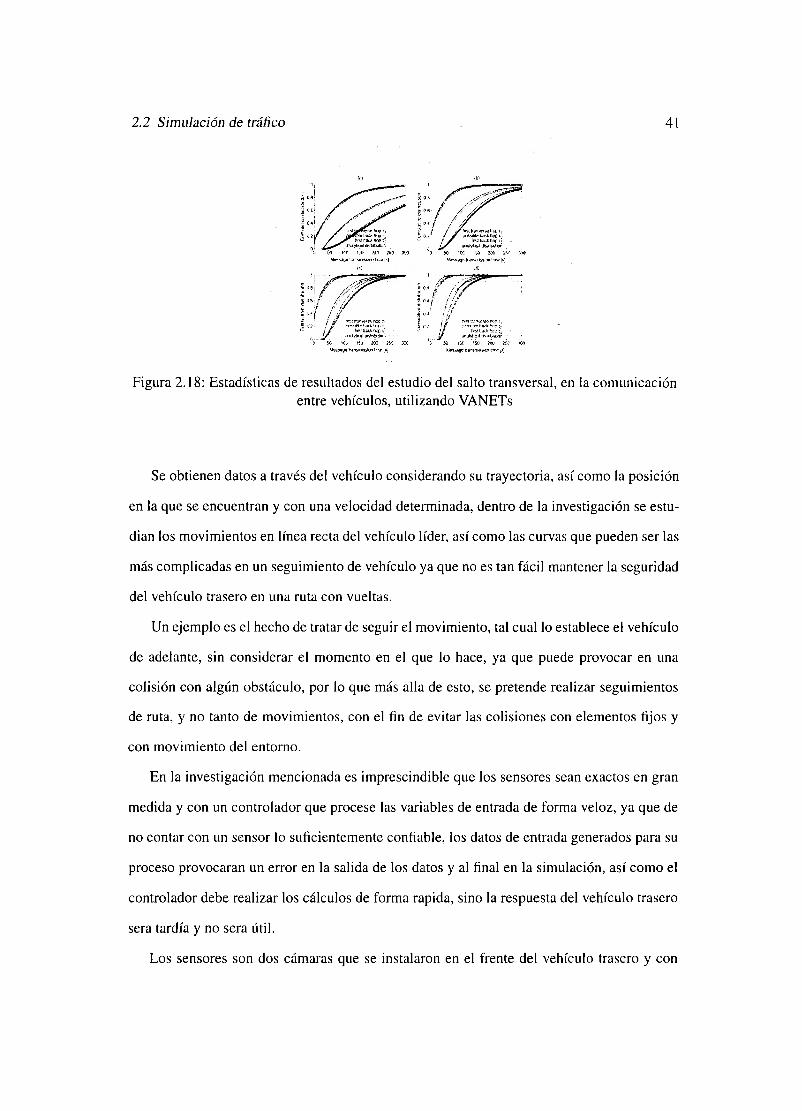
2.2 Simulación de tráfico 41
Figura 2.18: Estadísticas de resultados del estudio del salto transversal, en la comunicación entre vehículos, utilizando VANETs
Se obtienen datos a través del vehículo considerando su trayectoria, así como la posición
en la que se encuentran y con una velocidad determinada, dentro de la investigación se estu
dian los movimientos en línea recta del vehículo líder, así como las curvas que pueden ser las
más complicadas en un seguimiento de vehículo ya que no es tan fácil mantener la seguridad
del vehículo trasero en una ruta con vueltas.
Un ejemplo es el hecho de tratar de seguir el movimiento, tal cual lo establece el vehículo
de adelante, sin considerar el momento en el que lo hace, ya que puede provocar en una
colisión con algún obstáculo, por lo que más alla de esto, se pretende realizar seguimientos
de ruta, y no tanto de movimientos, con el fin de evitar las colisiones con elementos fijos y
con movimiento del entorno.
En la investigación mencionada es imprescindible que los sensores sean exactos en gran
medida y con un controlador que procese las variables de entrada de forma veloz, ya que de
no contar con un sensor lo suficientemente confiable, los datos de entrada generados para su
proceso provocaran un error en la salida de los datos y al final en la simulación, así como el
controlador debe realizar los cálculos de forma rapida, sino la respuesta del vehículo trasero
sera tardía y no sera útil.
Los sensores son dos cámaras que se instalaron en el frente del vehículo trasero y con

2.2 Simulación de tráfico 42
reconocimiento de patrones, pueden ubicar al vehículo delantero. Es importante también
considerar distancias de seguridad y no establecer el movimiento de los vehículos uno tras
otro, ya que sería más complicado el seguimiento del vehículo, como inseguro, para lo cual
se publica el algoritmo CUT (Control Using Trajectory) propio de la investigación.
Con las variables de entrada x,z que se obtienen del automóvil líder que se utilizarán para
el control lateral, y denotando ciertas reglas de control y angulo se procesan los datos.
Finalmente para los resultados de la simulación se ocuparon vialidades europeas, que
tienen las características de contener el peor escenario y los grados más complicados de
giros, cada uno de los automóviles mantienen una velocidad constante de I O m/s y una
distancia de 25 metros constante durante la simulación, para los girlos se ocupa el Modelo
Ackennan[24 ], el cual como la figura 2.19 muestra, se manejan los giros de las llantas
dependiento del control y la relación que tienen las llantas delanteras con las traseras .
.. ' ' ..
' ' ' •
, ,. , , , ,
Figura 2.19: Modelo Ackerman
En la figura 2.20 se observan los resultados obtenidos del seguimiento de un vehículo a
otro por medio de este algoritmo.
De acuerdo a lo comentado en el marco teórico de multitudes, es imprescindible definir el
alcance del simulador a explorar, derivado a los recursos necesarios para cada tipo de ejecu
ción y la forma en la que se abordará la definición del problema, sus alcances, las diferentes
variables que se incorporaran al mismo y finalmente los resultados que podrá entregar.

2.2 Simulación de tráfico
0.5
-05
100 150 für,olr-lrill'f'IQSj80m3j
2!:,0
Figura 2.20: Resultados del algoritmo CUT
43
Ya que si es necesario estudiar solamente una intersección o crucero, será necesario so
lamente enfocarnos en el punto de vista microscópico, y poder visualizar la interacción que
tendrán los vehículos, con los otros vehículos que componen dicho crucero o simplemente
con el semaforo que este controlando la intersección, por lo que será indispensable solamente
enfocarse en sus interrelaciones de estos elémentos y no de toda la ciudad o urbe.
Existe la posibilidad de que se pretenda estudiar el movimiento del tráfico como un
fenómeno social que puede ser visto desde la forma más general posible y visualizar los
resultados del módelo de forma global y con resultados matemáticos
Jason en 2011 [25], propone, un simulador que pueda ser un simulador híbrido entre
estos dos tipos de enfoques, el cual estudia los dos tipos de simulación y su interrelación,
inclusive permitiendo que existan puntos de encuentro entre los dos enfoques y establecer
un sistema más fluido de interface entre los mismos.
En este trabajo se toman en cuenta datos de tráfico real, así como datos probabilísticos
de movimiento que puedan darse. Menciona en el mismo que los simuladores han ido evolu
cionando de forma drástica, empezando por diversos enfoques incorporados en 1992, hasta
lo visto con el videojuego Grand Thef Auto.
Sin embargo una constante siempre se ha mantenido en todos estos trabajos y se trata
de la demanda de computo o procesamiento a gran escala que exigen estos simuladores,

2.2 Simulación de tráfico 44
por la gran cantidad de variables que inciden en los mismos, ya sea desde el punto de vista
macroscópico o microscópico en ocasiones los recursos de simulación deben ser muy bien
administrados, ya que enfocándonos en el punto de vista macroscópico, utilizamos ecuacio
nes diferenciales parciales, y del otro lado, con un enfoque microscópico, las simulaciones
son basadas en agentes los cuales generan un movimiento de acuerdo a ciertas reglas.
Dicho trabajo propone un esquema de simulación el cual en rendimiento y fidelidad, se
mantiene en buenos parametros, el simulador toma en cuenta grandes bloques de ciudades
y su estudio se puede centrar de forma macroscópica, sin embargo, es posible realizar un
acercamiento y poder visualizar la ejecución de forma focal izada y en un plano en específico.
Dentro del simulador se obtienen los parámetros de diversos criterios, ya que busca acer
carse lo más posible al mundo real, por lo que la definición tanto de las redes de caminos
como de agentes permiten establecer una amplia gama de posibilidades para incluir dentro de
la ejecución, ya que dependiendo de estos ingresos de datos, la simulación tendrá resultados
diferentes, un ejemplo de esto son los caminos que pueden definirse entre otros criterios co
mo caminos rurales y urbanos, ya que parámetros como la velocidad del vehículo, así como
la incidencia de accidentes es variada.
La simulación pretende en gran medida ser eficiente ya que utiliza los recursos de compu
to de forma ordenada y realizando un simulador que permita entregar los resultados y no
simplemente ejecutarse y permanecer mucho tiempo hasta poder encontrar un resultado, de
la misma forma no se pei:judica a la flexibilidad del modelo, tal y corno se comentó en el
párrafo anterior involucra diversas cuestiones a través del mismo.
El componente clave dentro de la simulación es tratar de acoplar dos diferentes tipos de
enfoques, como se comento, el enfoque micro y macroscópico, ya que se realiza de forma
continua, en donde uno se centra en la velocidad y posición explicita de cada vehículo y el
otro en una densidad que se tiene por tramo, es decir por un bloque más grande, para lo cual
se necesitan de interfaces en donde se puedan acoplar los dos tipos de simulación.
Para lo anterior es importante que los límites o fronteras se encuentren muy bien definido,

2.2 Simulación de tráfico 45
así como las condiciones iniciales de los vehículos, y se controlarán de forma muy concreta
el acoplamiento de los vehículos en las dos simulaciones.
Con el proposito de lograr una simulación continua cada carril se divide en celdas que
representan el tráfico y se toma en cuenta el módelo Aw-Rascle-Zhang, que explicado por
[26] es un sistema de ecuaciones que contiene modelos con doble fase de transición y que
mantiene la forma hiperbólica enunciada en las ecuaciones 2.13 y 2. 14
Pt + (y - p'+ 1)x = O (2.13)
Yt + (y2/p- yp')x = O (2.14)
En estas ecuaciones 2.13 y 2.14 se establece el modelo como una función que mide la
densidad de los automóviles en tiempo mayor o igual a cero y de acuerdo a su posición
x, se obtiene que la velocidad promedio de los automóviles enn donde --:1 mayor a 1 dicha
velocidad será una constante.
Para el caso de la simulación basada en agentes, se utiliza un método discreto basado en
el modelo car-following, en donde cada velocidad y aceleración de un vehículo se encuentra
delimitada por el movimiento del coche de enfrente, así mismo se determina el cambio de
carril en un vehículo de acuerdo a diferentes variables de seguridad y criterios de manejo,
entre diversos tipos de conducción de las personas.
Finalmente se obtiene un buen acercamiento al rendimiento que se tiene en el mundo
real, y el simulador establece los dos tipos de simulación de acuerdo a su objetivo principal,
y de acuerdo a lo mostrado en la figura 2.21 se obtienen velocidades 9-17 veces más rapidas
incorporando un enfoque macroscópico a un enfoque basado en agentes, estos resultados se
encuentran obtenidos en el CPU, mediante un dispositivo lntel Core i7 980x, que corre a
3.33Ghz
Otro simulador [27] , habla sobre la parelelización en el tiempo de ejecución del mo-
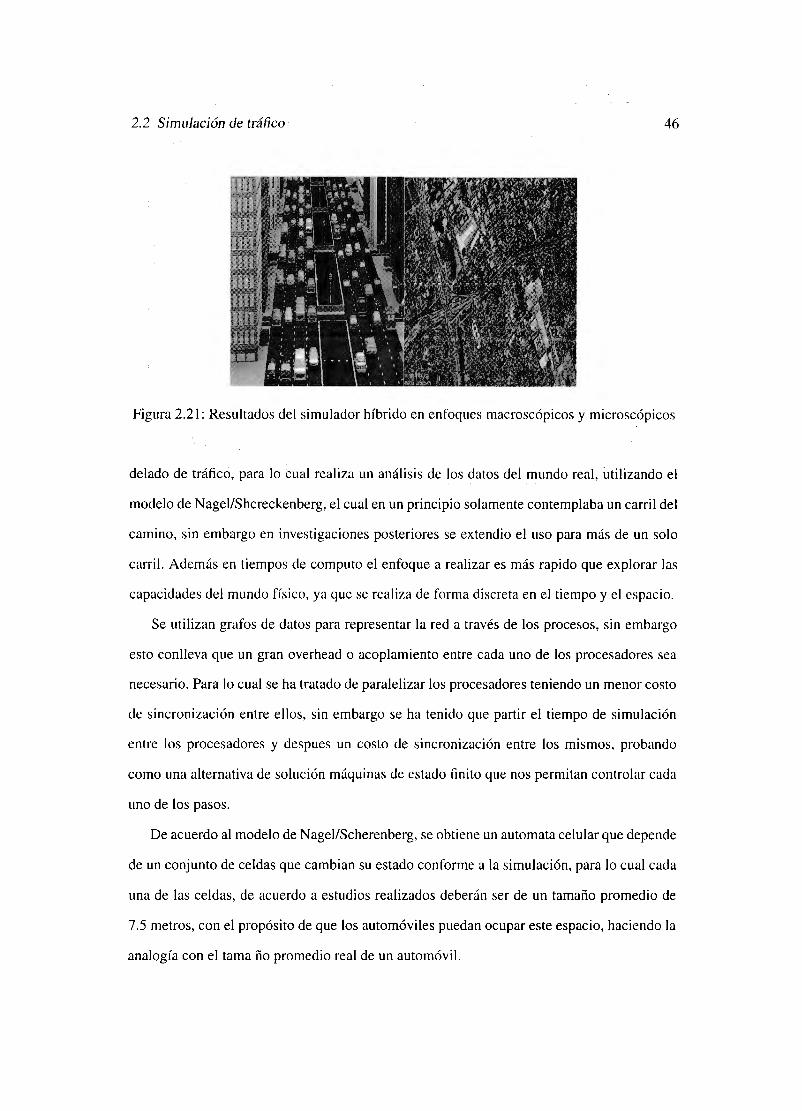
2.2 Simulación de tráfico 46
Figura 2.21: Resultados del simulador híbrido en enfoques macroscópicos y microscópicos
delado de tráfico, para lo cual realiza un análisis de los datos de! mundo real, utilizando el
modelo de Nagel/Shcreckenberg, el cual en un principio solamente contemplaba un carril del
camino, sin embargo en investigaciones posteriores se extendio el uso para más de un solo
carril. Además en tiempos de computo el enfoque a realizar es más rapido que explorar las
capacidades del mundo físico, ya que se realiza de forma discreta en el tiempo y el espacio.
Se utilizan grafos de datos para representar la red a través de los procesos, sin embargo
esto conlleva que un gran overhead o acoplamiento entre cada uno de los procesadores sea
necesario. Para lo cual se ha tratado de paralelizar los procesadores teniendo un menor costo
de sincronización entre ellos, sin embargo se ha tenido que partir el tiempo de simulación
entre los procesadores y despues un costo de sincronización entre los mismos, probando
como una alternativa de solución máquinas de estado finito que nos permitan controlar cada
uno de los pasos.
De acuerdo al modelo de Nagel/Scherenberg, se obtiene un automata celular que depende
de un conjunto de celdas que cambian su estado conforme a la simulación, para lo cual cada
una de las celdas, de acuerdo a estudios realizados deberán ser de un tamaño promedio de
7.5 metros, con el propósito de que los automóviles puedan ocupar este espacio, haciendo la
analogía con el tama ño promedio real de un automóvil.

2.2 Simulación de tráfico 47
Para lo anterior cada uno de los vehículos toma 4 reglas simples de movimiento dentro
del simulador:
• Aceleración. Va acoplada a la velocidad, ya que si un vehículo no ha alcanzado su
velocidad máxima, se incrementará la aceleración de acuerdo a un valor especificado.
• Frenado o descenso de la velocidad. Se refiere al punto en el que un vehículo pretende
dejar de moverse, por lo que realiza una desaceleración.
• Aleatorización. Se ingresa una variable que permite realizar un aumento/disminución
de la velocidad de forma aleatoria, ya que en muchas ocasiones el comportamiento de
los vehículos no es fijo, por lo que al ingresar una variable aleatoria nos permite tener
una variación del movimiento vehicular más real.
• Movimiento del vehículo. El movimiento que se deberá generar a través de las celdas,
ya que siempre deberá el vehículo estar contenido dentro de alguna celda en cada
momento de la ejecución.
A pesar de sus reglas básicas el modelo de Nagel/Schreckenberg exhibe de forma ca
si idéntica, lo que se da en el mundo real, ya que se forman congestionamientos con alta
densidad de vehículos y el movimiento entre celdas no ocupadas, se realiza en multiples
vehículos. Para el caso de este simulador cada uno de los nodos procesa el estado por cada
paso de ejecución y así mismo se procesa cada uno de los nodos separadamente, sin embargo
al procesarlos por diferentes procesadores se tiene un problema de acoplamiento.
Este problema de acoplamiento se encuentra dado por la división de tiempo que se ha
mencionado, y no siempre se acopla el tiempo de la simulación global, con el tiempo que
tiene cada uno de los nodos procesados. Otra desventaja es que al tener datos por separado
es necesario guardar una gran cantidad de datos de cada uno de los estados, por cada uno de
los procesos, durante toda la simulación.

2.2 Simulación de tráfico 48
Para lo cual cada procesador realiza una ejecución en un tiempo predeterminado y de
acuerdo a su acoplamiento ocupa tiempo de ejecución del proximo proceso, el cual a su
vez, entra en una fase extendida del anterior, mediante el cual el nuevo proceso genera las
condiciones iniciales en un proceso parecido a la preparación de la ejecución más ardua.
Cada proceso se encarga de calcular el resultante por cada intervalo de tiempo, para lo
cual será necesario realizar una armonización de los tiempos, ya que no todos los procesos
se ejecutan al mismo tiempo, aún más acentuado para procesos que conlleven más tiempo
de lo normal, derivado de su complejidad, para lo cual se tendrá un error, el cual deberá ser
cuidado para no invalidar la prueba, cuando el error sea mayor a los datos estableciendo
limites máximos de error.
Para la ejecución paralela de la simulación basados en el módelo Nagel/Schreckenberg
es necesaria la comunicación entre cada uno de los pasos de la simulación obteniendo un
gran overhead, provocando un retraso, el cual se puede acentuar con los problemas entre la
red de comunicaciones de los procesadores.
Sin embargo de acuerdo a lo mencionado por la investigación dicho simulador puede
mejorarse con el uso de medios más rápidos de comunicación, por ejemplo, incluyendo pro
cesadores de 64 bits, así como redes de tipo Myrinet. Dichas redes, ser refieren a sistemas
de red local desarrollados por la empresa Myricom que utilizan redes locales de alta velo
cidad , con el fin de interconectar diversas máquinas y poder lograr un cluster de n número
de máquinas.Las figuras 2.22 y 2.23 hacen referencia en primera instancia a clásicas co
nexiones o topologías de conexion de este tipo y un cluster, tomado como fuente de AMD
l28].
Sin embargo la simulación se desarrolla en procesadores de 32 bits.
Realmente el único estado que se conoce bien, sería el estado O, ya que los demás se
irán moviendo de acuerdo a la ejecución simúltanea de sus elementos, y realizando los aco
plamientos necesarios y al realizarse de forma paralela, se deberan verificar inclusive si se
tienen dos estados de simulación idénticos, ya que el enfoque original de este tipo de ejecu-

2.2 Simulación de tráfico
Mod hnst
Nerwork
~edport
~ Network as 1napped
Figura 2.22: Ejemplos de topologías de redes Myrinet
WorkslMion
1 1 1
1 1 1 1 1 1 1 1
Comµuh:1 Compute Compulfl Nui.JM Nmltt Nodff
MS·MPI lntorconnflc1
Figura 2.23: Cluster de computadoras en red Myrinet
ción requiere de un acoplamiento exacto de los estados asociados.
49
Como conclusión se obtienen varias gráficas que nos permiten medir el nivel de desvia
ción o cambio, tal y como lo muestra la figura 2.24.
Como un elemento que se estudia en este artículo se menciona el uso de redes y así uti
lizar lo más que se pueda de recursos informáticos al alcance de un simulador de tráfico. Tal
es el caso del simulador desarrollado por la universidad de Shangai en China [29], el cual
explora el uso de la red y la interconexión entre servidores para poder simular el tráfico y
entregar una plataforma que genere datos de salida de forma dinámica.

2.2 Simulación de tráfico
(/)
0.8 e o cii ·5 a, 0.6 "O
o e o 0.4 -~ ~ o 0.2 ü
o o
.. ·······-···········=·· -------~~~~=
500 1000 Simulation time
1500 2000
Figura 2.24: Correlación entre el estado y la densidad local, de acuerdo a un tiempo específico
50
Este simulador explora las capacidades del cómputo y realiza una organización exhaus
tiva de los elementos que puedan coordinarse de mejor forma de tal suerte que proporcionen
una plataforma robusta de simulación de tráfico.
Para esto contempla una serie de procesos o requisitos indispensables a los que este
simulador de tráfico conceptualiza y se enfrenta:
1. Demanda de muchos datos. Casi la mayoría de las simulaciones siempre se realiza de
forma local, ya que el poder de computo, así como de información requiere el uso de
un gran número de datos.
2. Requiere de estilos de simulación flexibles. Derivado a que las entidades de tráfico
usualmente contemplan elementos complejos de simular, el módelo debera contemplar
aspectos flexibles de la simulación.
3. Coordinación. Se requiere de la coordinación entre sub-sistemas que ya se tienen y
que se puedan comunicar entre si, con el fin de no generar un gasto innecesario de
algo que ya se tiene, tal vez no en la forma en la que se busca, pero debera encontrarse
la manera de acoplar los diferentes subsistemas

2.2 Simulación de tráfico 51
4. Estandarización. El estandarizar es necesario ya que al interior de la plataforma se
tendrá una gran cantidad de sub-sistemas ejecutandose al mismo tiempo, el intercam
bio de información deberá darse en lenguajes que los diferentes actores puedan enten
der.
5. Dinámica tolerante a fallas. Motivado a que el transito de los vehículos no puede espe
rar, es necesario que una falla en el sistema no provoque congestiones o acumulaciones
de vehículos innecesarias, sino que se minimice en la medida de lo posible el impacto
de una falla en la plataforma.
La tecnología de Grid, trata de resolver el uso de los datos y la coordinación dinámica
de los mismos a través de internet. Otro concepto utilizado es el de High Leve) Architecture
(HLA) o arquitectura de alto nivel que se refiere a una simulación como su nombre lo indica
de alto estandar que se basa en la estandarización y reuso de componentes que ya existen en
el entorno en el cual se desarrollará la simulación.
Para lo cual se cuenta con elementos que funcionan por separado que mediante el uso
de HLA y Grid se obtiene un esqueleto o infraestructura de información a ser explotada, sin
embargo el procedimiento de intercambio de información, como se realizará el recorrido del
flujo de datos, no existe.
En este sentido el trabajo enunciado establece el uso de HLA y la tecnología existente de
agentes para construir la plataforma de simulación y de acuerdo al Grid se pueda obtener el
soporte basado en entidades.
El trabajo contempla diferentes arquitecturas y procedimientos de desarrollo. El primer
tipo de división es la arquitectura de simulación por medio de tres capas principales:
l. Capa superior. Es la capa que tendrá contacto con el usuario y que todos los sub
sistemas que corren al interior del simulador deberán ser invisibles para esta capa,
solamente serán necesarios para la entrega o ingreso de información con el usuario.
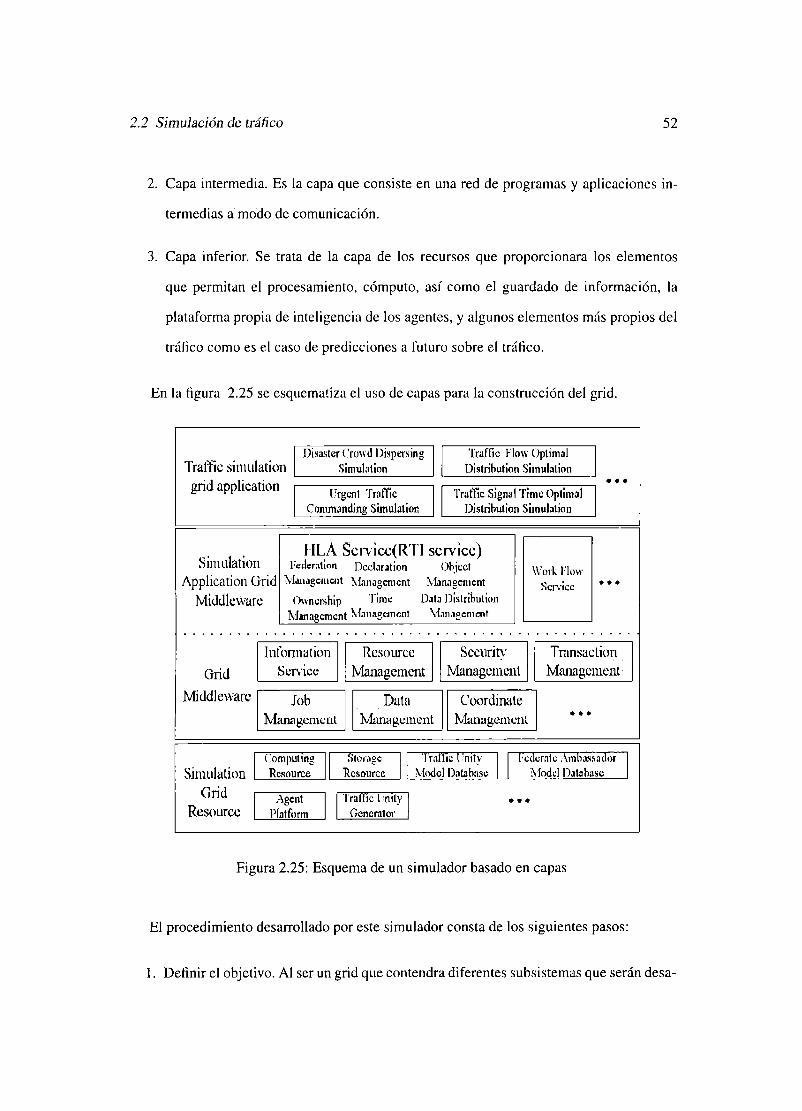
2.2 Simulación de tráfico 52
2. Capa intermedia. Es la capa que consiste en una red de programas y aplicaciones in
termedias a modo de comunicación.
3. Capa inferior. Se trata de la capa de los recursos que proporcionara los elementos
que permitan el procesamiento, cómputo, así como el guardado de información, la
plataforma propia de inteligencia de los agentes, y algunos elementos más propios del
tráfico como es el caso de predicciones a futuro sobre el tráfico.
En la figura 2.25 se esquematiza el uso de capas para la construcción del grid.
Traffíc simulation grid application
Disastcr Crowd Disp~'t"sing Simulation
Urgcnt Trnffic Cr,mmanding Simulation
Traffic Flow Optima! Distrihution Simulation
Traffic Signa! Time Optimal Dislrihution Simulation
HLA Scrvicc(RTI scrvicc) Simulation
Application Grid
Mi<ldlcwarc
Fecleration Dcclaration Ohject \Ianagcmcnt I\fonagcmcnt I\fanagcmcnt
\Vork Flow Scrvicc
Owncrship Time Data Dislrihution Managemcnt \fanagctn,~nt Man.lgcment
. . . . . . . . .. . .
•••
•••
lnfonnation Resource Securitv ·'
Transaction
Grid
Middlewarc
Simulation Grid
Resource
Scrvicc
Job Managcment
Computmg Rcsource
Agcnt Platform
lvlanagemcnt Mmagement Management
Data Coordina te Managcment lvfanagcmcnt •••
,ltor~gc
'Rcsourcc Trnl 1c l ln1ty
Moclcl Data base Fe i:rnlc Am 1assa or
Modd DaLJbasc
Tra 1c Fnity Gcncmtor
•••
Figura 2.25: Esquema de un simulador basado en capas
El procedimiento desarrollado por este simulador consta de los siguientes pasos:
1. Definir el objetivo. Al ser un grid que contendra diferentes subsistemas que serán desa-

2.2 Simulación de tráfico 53
rrollados por diferentes programadores, es necesario enfocar un objetivo en común
para toda la federación de elementos.
2. Conceptualizar. Es necesario establecer un modelo conceptual de la federación con el
fin de que todos conozcan el diagrama gene:ral y las interacciones entre los subsiste
mas.
3. Definir búsquedas. Es importante que los desarrolladores produzcan búsquedas acoor
de al diagrama general del simulador
4. Desarrollo de la federación. La cual debera ser de forma coordinada en la red y acoorde
a la especificación de la base de datos del modelo.
5. Integración y pruebas.Se integra la totalidad de los componentes y se desarrolla un
plan de pruebas, y se ejecuta de acuerdo a valores de entrega y resultados.
6. Ejecución y resultados. Se obtiene la federación ya en ejecución y los resultados de la
puesta en marcha.
Se obtienen procesos de sincronización de tiempos y se implementan elementos como
diversos servidores IBM, así como protocolos de intercambio de información, incluyendo
FTP, para lo cual se muestra en la figura 2.25 el resultado final de la implementación del
simulador y como dato final solamente explican que la arquitectura ha sido desarrollada
completamente y los resultados de simulación cumplen o son suficientes a las demandas de
simulación de tráfico.
Otro elemento que ha sido estudiado en gran medida, dentro de toda la ingeniería vial
y que afecta a la mayoría de las grandes cuidades es el como los semáforos se incorporan
dentro de las intersecciones, con el fin de lograr un buen equilibrio entre fluidez, seguridad
y control vehicular.
De esta forma [30] simula el uso de señales de transito o en concreto semaforos mediante
los vehículos que funcionan como estas señales.

2.2 Simulación de tráfico
( 1
Grid Environment
scnd
/-Í~;ffi:;---,\ ~ \,~m.it-; A!!env' :1
---·--·~·---·---~--....
I• Agent · · ·• Ü¡,1Jera lor . .
Qucry computmg ~~irci;: informotion
ltanium Smcr ...___
-------Qn~ry computing ·-----.1 ·o ~
rcs.ou:_~1~~~!9-rJ...----~ 1. • \\,>\ID.,
~1-----ft- - ' ra IC /-· l ;,
fu . y , ,. ~ Qui;:rv and nclton . tan1um M ~r : íCl!ISl~I
/'v ,-~ ~~ ,--v Y-1
compL~ing foOlHC
ltílniumSel'\fr
Figura 2.26: Entorno físico y conceptual de la simulación de tráfico
54
De acuerdo a lo explicado anteriormente este simulador hace uso de las VANETs y los
vehículos se utilizan para controlar el tráfico sin necesidad de infraestructura física en las in
tersecciones, para lo cual los vehículos funcionan a modo de controladores, como se explica
a continuación.
El costo estimado para un incorrecto manejo del tráfico, ya representa para la unión
europea el 1 % del costo total de los servicios, para lo cual usualmente las soluciones se
pueden dar mediante tres estrategias:
1. Reducir el número total de vehículos que circulan por los caminos.
2. Aumentar la infraestructura actual de caminos.

2.2 Simulación de tráfico 55
3. Aumentar el flujo de vehículos con la infraestructura ya existente.
Las dos primeras alternativas representan un costo mayor, ya que en la primera implica un
cambio de cultura organizacional, así como el acercm más las fuentes de trabajo, transporte
público, entre otras. Para el caso de la segunda alternativa implica una inversión de gasto
capital que no siempre es posible realizar, en algunos casos se justifica completamente el
realizar nuevas obras, sin embargo, en algunos otros casos es un gasto que debe evitarse en
gran medida.
Por lo que la tercera opción resulta imprescindible desarrollarla por razones económicas,
y en este caso en concreto el uso de VANETs resulta importante y relevente. Ya que el mis
mo hecho de implementar la infraestructura correspondiente para un semáforo, puede ir en
costo de los 50 mil dolares hasta 200 mil, para el caso de algunos dispositivos más sofisti
cados, por lo que el hecho de controlar semáforos con todas las intersecciones generaría un
costo exorbitante de dinero, para dotar tan solo en Estados Unidos de semáforos en todas las
intersacciones costaría 33 billones de dolares.
Dentro de toda urbe se encuentran interseciones que son cruciales para el flujo de vehícu
los de la ciudad, por lo que la investigación se centra en ellas, en la mayoría de los cruceros
más conflicitovs se encuentran inclusive semáforos que se controlan de forma dinámica, y
son el campo de acción para este trabajo de investigación, con el proposito de que sean los
vehículos que funcionen como semáforos que puedan controlar el desarrollo de una intersec
ción por medio del display de los vehículos involucrados, los cuales funcionarán por medio
de protócolos ya defnidos VANET.
Ha sido probado en múltiples ocasiones que los semáforos pueden ayudar a la fluidez de
una ciudad, o pueden inclusive retrasar el flujo, ya que la mayoría de los semáforos(alrededor
del 70-90 % ) internacionalmente son fijos, es posible que los vehículos a menudo tengan que
esperar tiempo innecesario en cruceros que mantienen la luz roja, más alla del tiempo viable
de la intersección, en algunas ciudades inclusive de paises desarrollados se ha optado por
2.2 Simulación de tráfico 56
utilizar semáforos que tienen un rango de tiempo que se parametriza de acuerdo al flujo de
vehículos.
La optimización de los semáforos en la intersección ha provocado el desarrollo del con
trol urbano de tráfico UTC, el cual ha sido foco de investigación de los últimos 40 años y
algunos de los principales criterios de control han sido los siguientes:
1. Duración del ciclo en su totalidad, es decir, el total del tiempo que pasa la luz en verde
para todas las direcciones en ese crucero en específico
2. Lapzo de luz verde. El tiempo por cada dirección en concreto que se tiene para la luz
verde
3. Orden de secuencia. La secuencia mediante la cual se controlarán las posibles rutas en
la intersección.
4. El último parámetro de control que no es en todas las intersecciones se denomina offset
para semáforos que se encuentran interconectados entre cruceros de la misma región
Se tienen algunos rabajos ya realizados como el SCATS 3 y el SCOOT 4, los cuales
controlan el tráfico en su mayoría por detectores, ubicados en cada intersección y así conocer
el tamaño de cola y poder establecer los tiempos maximos y minimos de duración de sus
semáforos.
Otra forma de controlar las intersecciones se puede realizar mediante nodos que se co
muniquen con los vehículos que pasen por el cruce y tomar los automóviles como sensores
moviles.
Sin embargo este enfoque establece una serie de reglas que permitirían ejecutarse con
exito el algoritmo, una de las cuales se refiere a los sistemas de comunicación que deberán
tener los automóviles, ya que se asume que cada uno de los vehículos tendrán instalados sis
temas de posicionamiento, así como dispositivos de sensores y comunicación con los demás
3Sydncy Coordinated Adaptivc Traffic systcm 4Split Cyclc and Offset Optimization Techniquc

2.3 Cómputo en paralelo 57
automóviles. Es importante la anterior regla ya que los semáforos serán establecidos por la
comunicación que exista entre los vehículos.
En las intersecciones se elegirá un líder que de acuerdo a las condiciones actuales de
tráfico en la intersección establecerá un tiempo de espera y realizará la función de semáforo
en rojo, por lo que comunicará a los demás vehículos en los displays hacia el conductor que
es necesario detenerse, así mismo durante toda la fase se controlara el envío de mensajes a
los demás automóviles, hasta que se decida obtener una luz verde y poder continuar con el
camino, hasta que ei siguiente vehículo más cercano al centro del crucero, de acuerdo a las
condiciones establezca el rol de líder y emprenda las acciones ya explicadas.
Finalmente dentro de los resultados se implementaron en el simulador DIVERT, especial
mente en la ciudad de Porto en Portugal, obteniendo los resultados que se pueden observar
en la figura 2.27
Expeolét.l benetil when compared lo l6°""o TL in Porlo ,oo~--~----~-~
80
40
20 .. ,/ ....
120 251 ~ •Medlum-1ow1 'lilediurn-tugh1 11-iigll.>
Vehiole clcnsity '.ve~ttrA
Figura 2.27: Beneficios por utilizar el algoritmo "Vehicle Traffic Light" en la ciudad de Porto, Portugal
2.3. CÓMPUTO EN PARALELO
Existen acercamientos que proponen el uso del poder de cómputo en paralelo con el
proposito de poder procesar un gran número de agentes y sus interacciones con los agentes

2.3 Cómputo en paralelo 58
restantes, así como evitar colisiones y procesamiento de datos, variables de entorno, entre
otras.
El principal objetivo de este tipo de cómputo es realizar una implementación lo más
eficiente posible en el acceso a los datos y la forma de procesarlos de forma paralela, en la
que una misma acción se pueda ejecutar a! mismo tiempo por diferentes hilos o nucleos, los
cuales tendrán que contar con una forma de administrarse y poder correr simultaneamente
sin contratiempos o errores.
Se puede implementar un cómputo en paralelo para simulación de tráfico de diferentes
formas, una de las más comunes es realizarlo con computadoras conectadas por medio de una
red o inclusive con super computadoras las cuales nos permiten un poder de procesamiento
que permite incluir diversas variables y modelar comportamientos en los movimientos so
ciales incluyendo los de multitudes de personas o como es el caso de nuestra investigación
sobre tráfico.
2.3.1. GPU
Otro enfoque de cómputo en paralelo utiliza las taijetas gráficas como método de pro
cesamiento, en un principio solamente se ocupaban en un principio solamente se ocupaba
de tareas relacionadas a las operaciones de visualización, sin embargo la Unidad de Proce
samiento Gráfica (GPU) ha permitido el involucramiento de las tm:jetas en operaciones que
anteriormente podian ser ejecutadas solamente por el CPU.
Actualmente el poder de procesamiento en comparación entre el CPU y el GPU se puede
visualizar en las figuras 2.28 y 2.29, existe una diferencia de casí l O veces mayor rapidez y
mayor ancho de banda en el comparativo realizado con estos dos dispositivos [3 l].
Esta diferencia en el poder de procesamiento tiene diferentes razones, de las más impor
tantes se encuentra el hecho de que los CPU's son dispositivos de uso general, es decir, que
al interior de una PC estos se encargan de realizar tareas de procesamiento de casi cualquier
tarea, por lo que no se especializa en cierto tipo de ejecuciones, lo que el GPU si maneja un

2.3 Cómputo en paralelo
·rhe-oretkaJ úB/,-
2.00
180
160
140
120
100
80
60
-CPU
GPU
Figura 2.28: Diferenciación en el ancho de banda entre CPU y GPU
enfoque a tareas de operaciones de punto flotante, muy comunes en el área de gráficos.
Theoretical GFLOP/s 1500
1000
TSO
500
250
o
~lnt,rl CPU Smcle- PrOC.ISlOO lnt-e-t CPU Ooubte PrKl'SIOn
S,e,p-01 Pcnh~~l Jun...C.. Od-05
=·~·*.#·~, H arJN'""OWn
M.ar-07 Jul-08 Dec-09
Figura 2.29: Diferencia de velocidad en Gflops entre CPU y GPU
59
Otro de los puntos que explican el poder mayor de procesamiento que tienen los GPU's
comparados con los CPU's se debe a la arquitectura física y lógica con la que se encuentran
diseñados y ensamblados, tal y como podemos ver en la figura 2.30 se pueden observar
dichas diferencias, siendo la más notable la organización con respecto al espacio destinado a
la Unidad Lógico Aritmética.
Este poder de procesamiento se puede ocupar para realizar operaciones paralelizables,
las cuales nos permitan un mejor desempeño en el rendimiento que se utilizará para el movi-

2.3 Cómputo en paralelo 60
LJ
CPU GPU
Figura 2.30: Arquitécturas CPU y GPU
miento de multitudes grandes o enormes, tal y como se menciona en las secciones anteriores,
el modelado de multitudes de gran tamaño conlleva una demanda de recursos importante, y
ya que nuestro objetivo es simular gráficamente un módelo de tráfico de vehículos.
Se han generado pocos trabajos que exploren la capacidad del GPU en la simulación del
tráfico, tal es el caso de f32], en este trabajo se explota el alto procesamiento y rendimiento
que manejan las tarjetas gráficas con el proposito de establecer un simulador que puede
manejar grandes multitudes de tráfico.
Utiliza el GPU para simular millones de nodos y enlaces que simulan el comportamiento
de millones de vehículos a través de movimiento de vehículos, los cuales siguen caminos
predefinidos y especificas que deben ser respetados, es decir, no se contempla el movimiento
sin restricciones, sino que todo el proceso de movimiento de vehículos re realiza a través de
estructuras de cola para los enlaces de automóviles.
Utilizan la metología de la formulación o enfoque del problema a través de paradigmas
basados en campos, tales como los relacionados con algunos otros dominios científicos, co
mo los campos electro-magnéticos, sin embargo la metodología publicada por este trabajo
de investigación agrega aspectos de detalles de comportamiento no lineal.
Se utilizan como en los campos magnéticos vectores que contienen la dirección y la
2.3 Cómputo en paralelo 61
magnitud o intensidad del movimiento para cada nodo. Los valores de las entidades dentro
de la simulación son codificados para un menor uso del acceso de memoria, y para este
trabajo en específico se lograron resultados para más de 2 millones de nodos de la red y 20
millones de vehículos representados procesados con el GPU y dando una velocidad mayor
de la manejada hasta ese momento en otros simuladores.
El modelo de mobilidad contiene tres componentes.
• Rutina global de elección de giros o saltos a través del recorrido
• Modelo de mobilidad para representar los vehículos
• Modelo de estructura de tila o cola que nos permite manejar los estancamientos o
congestiones vehiculares
La forma en la que se realiza la división de los componentes en el área de la simulación es
realizado por medio de rejillas que contienen a su vez celdas, cada una de las cuales pueden
ser de tipo horizontal o vertical, y que permiten un arreglo de rejilla de dos dimensiones y
como su nombre lo especifica las rejillas horizontales solamente permiten el movimiento de
dirección solo de forma horizontal, y lo mismo pasa con las verticales.
Se establece un vector de probabilidades el cual se define de la siguiente forma:
(2.15)
Dicho vector guarda la probabilidad de vuelta a la izquierda, derecha, continuar hacia
adelante y realizar una vuelta en U.
Para el movimiento de los vehículos se representan dos fases: la fase de división y de
unión. En la primera fase se tienen dos contadores para el caso del movimiento horizon
tal(derecha, izquierda) y para el vertical(arriba, abajo), los cuales nos permiten definir me
diante números flotantes el número de vehículos que ocupan cada celda y mediante esta

2.3 Cómputo en paralelo 62
fase de división se genera en cada la celda la fracción del vehículo actual que se movera
posiblemente a cada uno de los 4 destinos probables.
En la siguiente fase de unión se cuentan los coches entrantes a la celda y se suman a
los actuales. Para el caso del procesamiento de la cola o tila, se modela en terminas de
la acumulación de coches por celda y en cuanto se detecta una saturación o congestión se
comienzan a mover los vehículos a los vecinos.
La figura 2.31 nos muestra de forma gráfica el acomodo de los enlaces considerando los
ingresos y tipos de movimiento que puede tener cada una de las celdas, ya sea horizontal
y vertical y la conexión entre los enlaces y los nodos, ya que dependienta el movimiento
realizado(izquierda, derecha, continuar de frente, vuelta en U) se puede acceder a otro tipo
de celda.
Por ejemplo en la primera celda que se encuentra en la esquina superior izquierda la
acción tomada por el vehículo es continuar hacia adelante o movimiento recto(straight), lo
que provoca que se encuentre en otra celda vertical, ya que su movimiento próximo podrá ser
hacia arriba o hacia abajo.
(-2. 0 ) (-2.~1)
1 --- :e: t-- s 1~.1
Figura 2.31: Dependencias de ingreso para enlaces verticales
Para el alojamiento de los datos requeridos para la simulación utilizan texturas, en la
cual cada una de sus elementos se denominan texels. Para el procesamiento de los caminos

2.3 Cómputo en paralelo 63
se utilizan anchos predefinidos del camino y se calcula el maximo número de automóviles
que pueden dejar una celda, de acuerdo a las siguientes igualdades:
J\,1 ax1s = 1\1 axúrwsulúlaporsemaf oral = velocidcullúnde*rnerlúlaopasocletiem.po/ largodelvehiculo
(2.16)
!ii ru: = AJ ci:r1 s * conteodevehú:uloactiwl * largoclelvehiculo * largodcl.<;egm,ento (2.17)
Estas dos igualdades nos permiten determinar e inclusive modificar o variar la velocidad
de evacuación dependiendo o acorde al tamaño del modelo, permitiendo mayor flexibilidad
y fidelidad al modelo.
Dentro de la red vehicular cada uno de los nodos representan las intersecciones y los bor
des o uniones de esos nodos, se refieren a los segmentos de camino que se tienen entre estas
intersecciones, para lo cual se contempla dentro del modelo los datos en latitud y longitud
que son convertidos a valores positivos en x,y de la red de simulación.
Como resultados del trabajo se tiene la simulación se visualizan las variables de salida
como colores en los puntos de congestionamiento y de tráfico vehicular, en la tabla 2.1
se puede observar los resultados del rendimiento y procesamiento con distintas ciudades de
Estados Unidos que contienen números variables de nodos, enlaces y los tiempos en los
que se realiza la ejecución, así como el tiempo de evacuación y los recursos utilizados en
términos de las texturas ocupadas.
2.3.2. CUDA
Hasta hace algunos años programar el GPU para realizar tareas de procesamiento se tor
naba un poco complicado, ya que era necesario utilizar rigurosamente lenguaje ensamblador,

2.3 Cómputo en paralelo 64
Cuadro 2.1: Rendimiento en redes vehiculares de caminos en Estados Unidos Estado Nodos Enlaces Textura Tiempo de evac(Hr.) Tiempo de ejecución (Segs)
DC 9,559 14,884 1048576 35.20 54.90 LA 413,574 988,458 4194304 65.07 409.591 TN 583,484 1,335,586 3211264 157.91 353.89 FL 1,048,506 2,629,268 4194304 179.20 611.83 Tx 2,073,870 5,116,492 3211264 217.60 777.65
lo que dificultaba en gran medida el aprendizaje y manejo de rutinas complicadas o que ne
cesitaran algoritmos complicados de procesamiento.
Posteriormente tres nuevos lenguajes se desarrollaron en especifico para poder acceder
al GPU, los dos primeros proveniente del estandar OpenGL : el OpenGL Shading Language
(GLSL) , así como el creado por NVIDIA "C for graphics" Cg y el vinculado a DirectX de
Microsoft llamado "High Leve) Shading Language" desarrollado en conjunto con NVIDIA.
Finalmente para las tarjetas gráficas de NVIDIA se publicó el Compute Unified Device
Architecture (Arquitectura de Dispositivos de Cómputo Unificado) por sus siglas usualmente
llamado CUDA, el cual utiliza una variación del lenguaje C y que nos permite especificar el
acceso a memoria de hilos(threads), así como bloques de los mismos y poder utilizarlos para
ejecutar nucleos denominados kernels en CUDA de forma paralela.
En la figura 2.32 se observa el procesamiento de la ejecución paralela por medio del
cómputo con CUDA.
De acuerdo a [33), cada vez es mayormente usado el GPU para desarrollo de cómputo
en general, ya que la forma en la que se paraleliza la ejcución de los datos, es el cómputo del
futuro, mientras más grandes sean los recursos necesitados para el computo, de mejor forma
se justifica el uso de GPU para su ejecución.
Sin embargo existen ciertas reestricciones ya que el cómputo en paralelo, en su inicio
fue concebido para el uso dentro de ambientes gráficos y a pesar de que el desarrollo de la
programación en el GPU se ha venido actualizando con el paso del tiempo, la concepción
enfocada al pintado de objetos, en algunos casos se conserva, el cómputo en paralelo se

2.3 Cómputo en paralelo 65
Figura 2.32: Procesamiento en el CPU y GPU a través de CUDA
ejecuta con éxito en las siguientes tipos de aplicaciones:
• Los requerimientos de cómputo son grandes, ya que el rendering requiere millones de
pixeles por segundo y cada uno de ellos cientos de operaciones, con el proposito de
atender la demanda de recursos de aplicaciones en tiempo real.
• Aplicaciones en las que el paralelismo es indispensable, ya que para el pipeline de
grálicos, el paralelismo se acopla de buena forma
• Aplicaciones en las que el rendimiento es más importante que la latencia. Ya que el
GPU tiene prioridad en el rendimiento más que en la velocidad, ya que el GPU fun
ciona en nanosegundos y los sistemas visuales de los humanos operan en los milise
gundos, por lo que la diferencia es imperceptible, ya que el avance en el rendimiento
compensa este tipo de retraso o latencia.
De acuerdo a lo anterior el cómputo en el GPU para apliaciones de propósito general
ha tenido un gran crecimiento, ya que una vez exploradas las capacidades de procesamiento
y rendimiento que puede obtenerse de una tarjeta grática, ha provocado que se hayan reali
zado una extensa cantidad de algoritmos y procesos que antes se realizaban en cómputo en
paralelo, tal vez en diferentes máquinas, en servidores o inclusive en el CPU.

2.3 Cómputo en paralelo 66
Esto ha tenido varias razones, sin embargo entre las más importantes podemos encontrar
que aunque el GPU siempre ha tenido el poder de cómputo que se puede observar en este
momento, la programación en la tarjeta gráfica nunca se había aperturado en la forma en la
que se tiene ahora.
De acuerdo al pipeline gráfico se tienen diferentes procesos dentro del desarrollo gráfico
ordenados de operaciones menores a mayores de acuerdo a los siguiente:
• Operaciones en los vértices. Que se refiere al hecho de que cada vértice debe ser trans
formado en la pantalla y típicamente transformado por las luces que interactúan sobre
él.
• Montaje de primitivas. Cada uno de los vértices se montan en triangulos, los cuales
son esenciales para el hardware, ya que es la forma en la que trabaja la tarjeta gráfica.
• Rasterización. Proceso, mediante el cual se determina que espacio en la pantalla de
berá ser ocupado por determinados triangulos de los gráficos
• Operaciones en Fragmentos. Se usa información sobre el color asociado a los vértices,
incluyendo algunos datos adicionales provenientes ppara formar las texturas y cada
fragmento se sombrea para determinar su color final.
• Composición. Todos los fragmentos son montados en una imagen final con un color
por pixel, usualmente manteniendo el fragmento más cercano a la cámara para cada
ubicación del pixel.
El proceso anterior se puede visualizar diagramado por NVIDIA para mayor referencia
en la figura 2.33
La diferencia fundamente! entre este proceso de ejecución y el utilizado por el CPU es
principalmente en que el CPU divide las actividades de la cola de actividades de una en una y
utiliza la mayoría de sus recursos para ejecutar esa actividad y completarla, mientras tante el
GPU realiza las actividades indicadas en paralelo, tratando de tener un mayor rendimiento.
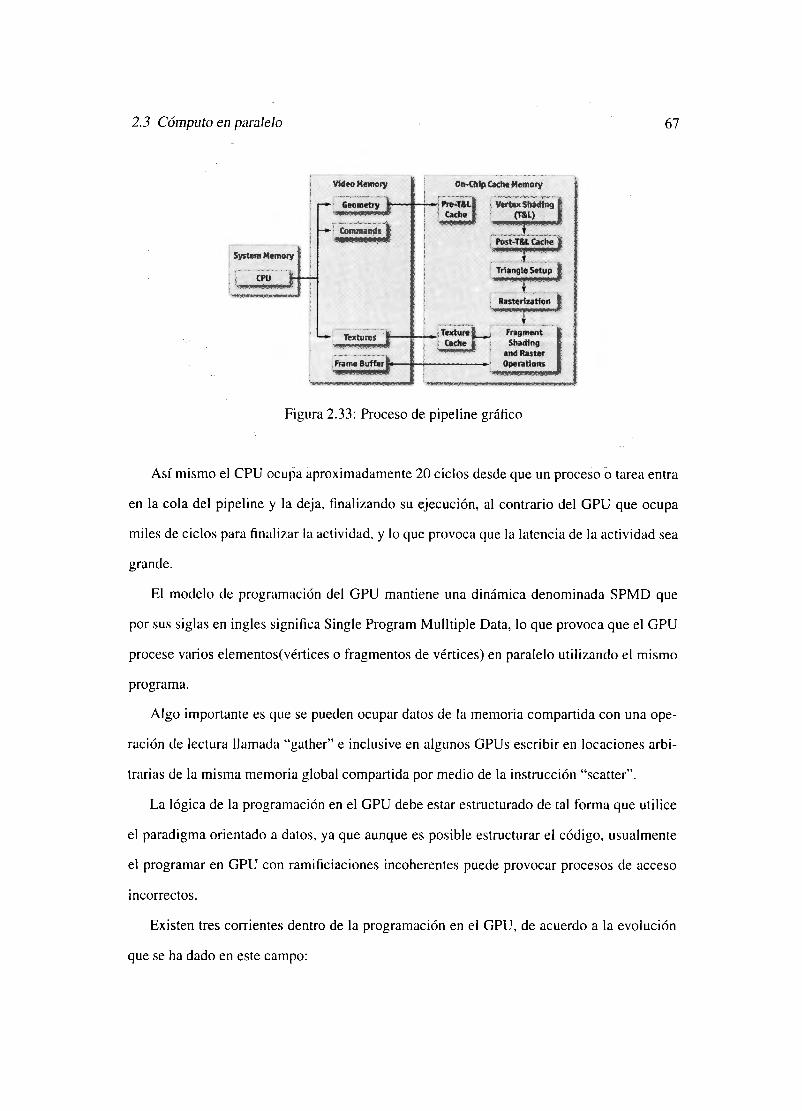
2.3 Cómputo en paralelo
System Memory !
CPU
Video M.emory
Geometry J----ii----+-
Cornmands - '' - l • )'fi;s;U..h ;_ W)l
1
On- Chip Cache. Memory
1 Rasterization
Fragment Shading
' and Raster Operations
Figura 2.33: Proceso de pipeline gráfico
67
Así mismo el CPU ocupa aproximadamente 20 ciclos desde que un proceso o tarea entra
en la cola del pipeline y la deja, finalizando su ejecución, al contrario del GPU que ocupa
miles de ciclos para finalizar la actividad, y lo que provoca que la latencia de la actividad sea
grande.
El modelo de programación del GPU mantiene una dinámica denominada SPMD que
por sus siglas en ingles significa Single Program Mulltiple Data, lo que provoca que el GPU
procese varios elementos(vértices o fragmentos de vértices) en paralelo utilizando el mismo
programa.
Algo importante es que se pueden ocupar datos de la memoria compartida con una ope
ración de lectura llamada "gather" e inclusive en algunos GPUs escribir en locaciones arbi
trarias de la misma memoria global compaitida por medio de la instrucción "scatter".
La lógica de la programación en el GPU debe estar estructurado de tal forma que utilice
el paradigma orientado a datos, ya que aunque es posible estructurar el código, usualmente
el programar en GPU con ramificiaciones incoherentes puede provocar procesos de acceso
incorrectos.
Existen tres corrientes dentro de la programación en el GPU, de acuerdo a la evolución
que se ha dado en este campo:

2.3 Cómputo en paralelo 68
• Programar en el GPU para gráficos
• Programar en el GPU para propósito general de la primera forma.
• Programar en el GPU para propósito general de la forma más reciente.
De las tres categorías, en la que se centra esta investigación ocupa cuestiones inherentes
a todas las categorías, ya que la simulación se establece dentro de un entorno gráfico (pri
mera categoría), utilizando shaders para programar, mediante Frame Buffer Objects y Vertex
Buffer Objects (Segunda categoría) y finalmente estableciendo parámetros de ejecución me
diante CUDA, realizando una programación estructurada en los datos (tercera categoría).
Hablando de esta última categoría podemos comentar que los kernels en CUDA son
flexibles, en mejor manera que los primeros intentos de programar en el GPU tales como
el Open GL Shading Language (GLSL), y permitiendo mayor variedad de tipos de datos,
inclusive programando en forma casi idéntica a C.
Los cuatro vocablos principales dentro de la programación en CUDA son "scatter-gatter","map",
"reduce" y "sean". Las operaciones de scatter-gatter son utilizadas para leer, escribir de una
localidad de memoria específica, map nos sirve para aplicar una operación global para todos
los elementos de una lista o una colección como se haria en un ciclo dentro del CPU, pero
con acceso más rapido ya que se tiene bien establecida la cantidad de datos y sus localidadas
y así aplicar más rápidamente la instrucción.
El tipo de operación reduce, contempla operaciones para conjuntos de elemento, como
por ejemplo sumar 8 elementos de una textura y dejar el resultado en otra textura que tenga
el resultado de tamaño cuatro u ocho veces menor. El comando Sean que nos permite tomar
un arreglo de elementos y homogeneizarlo o reducirlo en otro arreglo, con una reducción
que sea necesario aplicarle.
En este sentido l34J proporciona un nuevo enfoque de procesamiento de tráfico, ponien
do como eje principal la ejecución de forma paralela mediante CUDA, estableciendo dos
métodos principales completamente paralelizables mediante la inclusión de un enlace único

2.3 Cómputo en paralelo 69
explorando una función de acceso atómica propia de CUDA. En la figura 2.34 se observa
una de las formas en la que se guardan los datos de administración de nodos.
Array of admin shucts
Admin Data Strnct
Start Pos End
• • • Index o 1 n
s p E s p E m • • • • • • • • •
Veh Veh Veh Veh Empty Empty
Array of all vehicle data
Figura 2.34: Ejemplo de arreglo de administración de nodos
Estos dos metodos principales moveNode y moveLink se ejecutan de forma paralela
para cada uno de los agentes, utilizando buffers que se compottan como nodos, los cuales se
administran en forma de bloque por el programa principal, una vez que se realizó la ejecución
sin optimización se buscaron nuevas formas de administrar los nodos.
El aitículo explora diferentes paradigmas, algunos de los cuales son sugeridos por el
equipo de desarrollo de CUDA, tales como Ring Buffers los cuales son arreglos o listas
circulares con bloques definidos y que no contienen inicio ni fin, sino que el último elemento
se comunica con el primer elemento de la lista por lo que no se tendrán elementos nulos
dentro del arreglo, este cambio permitió un crecimiento del 300 % en la aceleración de la
simulación, tal y como se visualiza en la figura 2.35

2.3 Cómputo en paralelo
§R l t-"""7".;,,.,---------- ---------; ,,..
i 1 O+----~--~------~--~~
o 20 40 60 iO iOO
Pcpulitkm p<rctnt,1(1:
AOSNODES --S'.>ANODES
-+- R!NGNODES
- .RINGNOOF-"i.2
J_¡\',I
J Figura 2.35: Comparación de aceleración entre los diversos paradigmas utilizados
70

3. DESARROLLO Y SIMULACIÓN
3.1. ESPECIFICACIONES GENERALES
El enfoque para la simulación es visto desde un punto de vista microscópico, ya que se
centra en la forma en la que los agentes se moverán dentro del entorno víal, no incoporando
ecuaciones macroscópicas a nivel general, sino simplemente visualizando el movimiento a
nivel particular y para cierto tipo de entornos, tales como algunas calles o cruceros. Ya que lo
que se busca es poder encontrar una forma en la que los vehículos se puedan mover utilizando
el poder del cómputo en el GPU.
El desarrollo propuesto busca utilizar el poder de procesamiento paralelizable en gran
medida del GPU, conforme a esto la construcción del simulador estará enfocado a la parte
del procesamiento que se desarrolle en el GPU y utilizando el CPU para la carga de datos,
parámetros, etc.
Se busca que mediante el desarrollo el simulador pueda ejecutar cientos o inclusive miles
de agentes simultáneamente que se procesen por medio de la tarjeta gráfica, permitiendo la
71
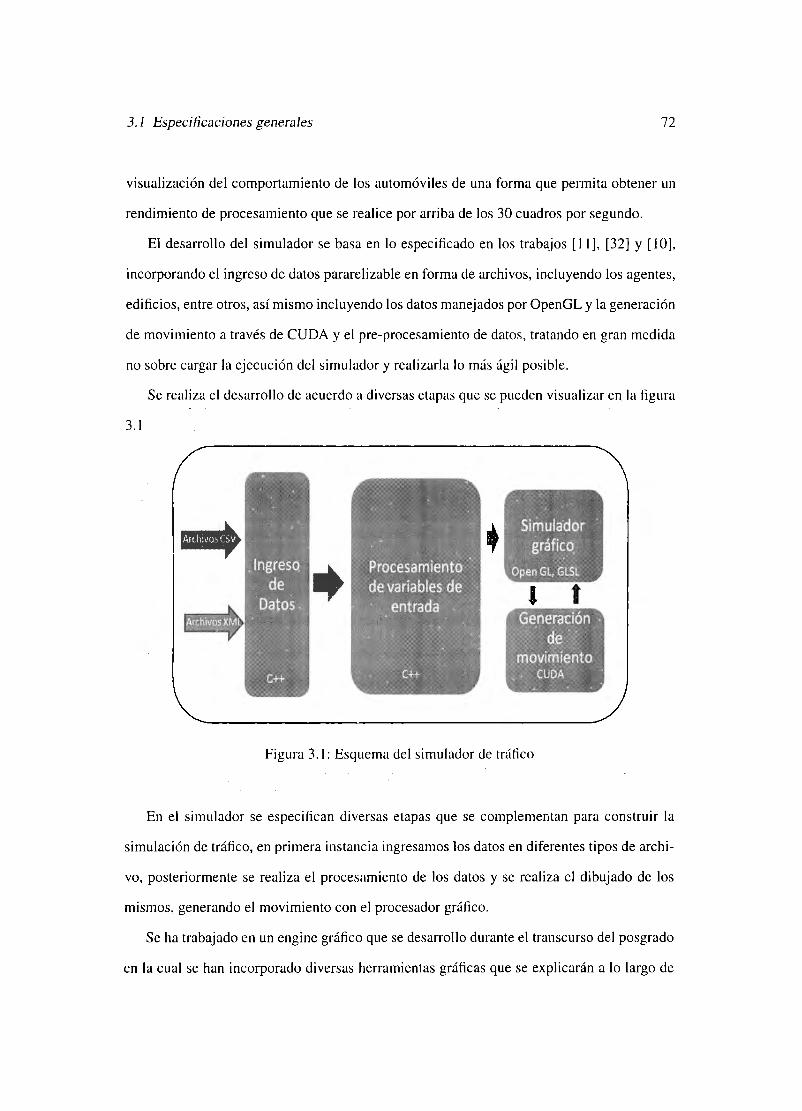
3. J Especificaciones generales 72
visualización del comportamiento de los automóviles de una forma que permita obtener un
rendimiento de procesamiento que se realice por arriba de los 30 cuadros por segundo.
El desarrollo del simulador se basa en lo especificado en los trabajos [11], [32] y [10],
incorporando el ingreso de datos pararelizable en forma de archivos, incluyendo los agentes,
edificios, entre otros, así mismo incluyendo los datos manejados por OpenGL y la generación
de movimiento a través de CUDA y el pre-procesamiento de datos, tratando en gran medida
no sobre cargar la ejecución del simulador y realizarla lo más ágil posible.
Se realiza el desarrollo de acuerdo a diversas etapas que se pueden visualizar en la figura
3.1
+ • t
Figura 3.1: Esquema del simulador de tráfico
En el simulador se especifican diversas etapas que se complementan para construir la
simulación de tráfico, en primera instancia ingresamos los datos en diferentes tipos de archi
vo, posteriormente se realiza el procesamiento de los datos y se realiza el dibujado de los
mismos, generando el movimiento con el procesador gráfico.
Se ha trabajado en un engine gráfico que se desarrollo durante el transcurso del posgrado
en la cual se han incorporado diversas herramientas gráficas que se explicarán a lo largo de

3.2 Variables de entrada 73
este capítulo.
3.2. VARIABLES DE ENTRADA
La simulación necesita de variables propias del modelo a utilizar, ya que su uso no es
particular de una situación sino que la simulación permite ser parametrizada de acuerdo a lo
que el usuario desee ingresar.
Estas variables son las que usualmente vemos en la vida real y en el tráfico común y
que nos permitirán tener una interacción más concreta con el usuario poder desarrollar una
simulación que corresponda a diversas necesidades propias de cada situación, por lo que
este simulador no se realizará de forma lineal con los mismos criterios de entrada, sino que
será alimentado tal y como se muestra en la sección anterior por archivos.
Estos archivos permiten una gran flexibilidad en la definición de parámetros y datos a
utilizar dentro de un sistema.
Dentro de nuestro primer tipo de archivo se encuentra Extensible Markup Language
(XML), el cual es leído usualmente por un parser, y se obtienen los datos que contiene el
archivo XML y que se realiza por medio de etiquetas, el esquema de forma general se mues
tra en la figura 3.2, cada una de las etiquetas guardan parametros al interior de ellas, siendo
que por si mismas las etiquetas nos especifican el tipo de valor que se espera al interior de
las etiquetas, estos mismos datos podrán ser de forma recursiva, como se muestra en la figu
ra enunciada se pueden agrupar datos, hasta el nivel que se requiera dentro del sistema que
utilizará.
Este tipo de archivos nos permitirán definir los datos y variables globales que se utilizarán
durante toda la simulación, tales como agentes, los edificios de las ciudades, entre otros
valores que se requeriran al interior de la ejecución del modelo.
Otro tipo de archivos a utilizar serán los archivos separados por comas (CSV), los cuales
se han elegido de tal forma que nos permita definir de forma más ágil valores de coordenadas,

3.2 Variables de entrada 74
/\ Parameter Para meter
Figura 3.2: Esquema de archivo XML
para lo cual los valores de datos se pueden ingresar ya sea numéricos o de cadenas, solamente
separados por comas entre dato y dato, siendo un archivo muy común en diversos sistemas
tanto como valores de ingreso o valores de salida.
De esta forma utilizando estos tipos de archivos y algunos propios que se especificarán
en el código nos permitirá tener una interacción con el mismo simulador.
3.2.1. AGENTES
Los primeros datos a ingresar son los relacionados a los automóviles, dentro del archivo
AgentsTraffic.xml se establecen diversos aspectos de los vehículos, tales como el tipo de
modelo que se pretende utilizar, número de agentes que utilizará el modelo, entre otros.
Uno de los aspectos más importantes y que definirá en gran medida el desarrollo de la
simulación y que es en sí misma la razón principal de ser de un simulador de tráfico son las
actividades que realizará cada uno de los agentes durante el día, es decir, las coordenadas
que el vehículo tomará como puntos de inicio y fin de sus movimientos y durante los cuales
el vehículo permanecerá en modo detenido, en la tabla 3.1 se puede observar la organización
del archivo tipo csv que es necesario incluir en la simulación.
Básicamente este archivo establece como parámetros: el agente, las posiciones x,y,z del

3.2 Variables de entrada 75
Cuadro 3.1: Formato de archivo csv Agente Pos x Pos y Pos z Actividad
l 50 o 25 Home 350 o 467 School 1850 o -525 Job 50 o 25 Home
2 1523 o 1600 Home 2 -52 o -15 Job 2 1523 o 1600 Home
vehículo y el identificador o nombre de la actividad, el simulador valida que la cantidad de
vehículos establecidos en el archivo .xml coincida con los mismos que se ingresan dentro del
archivo .csv.
Para definir si dentro del simulador se deberán tomar los valores del archivo CSV o no, se
encuentra definido dentro del archivo AgentsTraffic.xml, una variable "position" que puede
contar con dos valores posibles: "CSV" o "RANDOM". Si se especifica "CSV" el simulador
leera el archivo .csv establecido en la etiqueta del archivo xm. Existirán valores a utilizar
tales como el número de clones que se refiere al número de agentes a utilizar durante la
simulaciín, como paramctros propios de los agentes, realizando las siguientes validaciones,
con el proposito de cuidar la integridad de los datos dentro de la simulación:
• Verificación de la existencia del archivo csv
• El número de agentes leidos deberá ser igual al número de clones + 1, es decir, si
dentro del archivo se especifican que el agente, cuenta con 11 clones, el archivo csv,
deberá contar con las posiciones de al menos 12 agentes, de acuerdo a la especificación
descrita anteriormente.
• Cada agente deberá contar con al menos una actividad, aparte de su punto de inicio,
es decir, el punto de inicio se cuenta también como una actividad, al final cada agente
contará con la referencia mínimo a dos puntos, uno de inicio y uno de final dentro de
la simulación y poder obtener el movimiento del agente.

3.2 Variables de entrada 76
• Los valores especificados en las posiciones de actividades deberán ser valores numéri
cos.
El fallo en alguna de las reglas descritas provocará el mostrar el error que fue encontrado,
así como se realizará la finalización de ia ejecución del simulador.
Si dentro del archivo xrnl se especifica "RANDOM" el simulador estahlecera posiciones
aleatorias para los vehículos en su inicio, y le asignará una actividad aleatoria, con el pro
pasito de que todos los agentes creados cuenten con posiciones minimas de un origen y un
destino, tal y como en el caso de la elección del archivo csv.
El simulador ingresa los datos a una clase tipo AgentTraffic que hereda de la clase prin
cipal Agent que es específica para movimiento de personas, los datos ingresados en el .csv
se toman para realizar una cola de actividades a realizar por los agentes, validando que la
primera así como la última actividad se denominen "home", independientemente de que no
coincida la posición x,y,z el simulador toma estas etiquetas como inicio y fin de actividades
de un determinado agente.
3.2.2. CAMINOS O RUTAS
Una vez que ya contamos con la definición de los automóviles, especificando sus activi
dades, así corno el tipo de agente que contendrá al vehículo, en toda simulación de tráfico es
imprescindible establecer las reglas mediante las cuales los automóviles se podrán mover en
su entorno, para lo cual necesitamos conocer las rutas o caminos a tomar.
En este sentido se establece, de primera forma la lectura que se tendrá para el ingreso de
los datos, provenientes de alguna fuente, para lo cual se estableció la clase RoadParser, que
realiza la lectura del archivo Roads.xml, en donde se establece el ID del camino, así como el
archivo csv que contendrá los nodos a leer.
El archivo csv estará organizado como lo específica la tabla 3.2.
En el archivo csv de rutas en primera instancia se encuentra el id del nodo, el cual de-

3.2 Variables de entrada 77
Cuadro 3.2: Formato de archivo csv para el camino
Id nodo Pos x Pos y Pos z Sentido
o o 10 R 2 5 o 10 R 3 10 o 10 R ,
15 o JO R '+
5 20 o 10 R 6 25 o 10 R 7 30 o 10 R 8 o o 15 R 9 5 o 15 R 10 10 o 15 R 11 15 o 15 R 12 20 o 15 R 13 25 o 15 R 14 30 o 15 R
berá ir de forma numérica, de no ser así la carga del archivo provocará un error que se
muestra al usuario y finalizará el simulador, posteriormente los nodos se especifican por sus
posiciones x,y,z.
La tabla de rutas generaría un camino tal y como lo muestra la figura 3.3. Se puede
observar que las posiciones en coordenadas de los nodos, permiten la creación del camino,
gracias a la definición de los nodos, es importante que los nodos mantengan una congruencia
secuencial, ya que de no ser así los caminos por donde podrán moverse los automóviles
serán limitados e incorrectos, es decir, al definir el archivo csv que lee el parser de caminos,
se está creando las posibles rutas por las que los automóviles podrán trasladarse.
En el ejemplo del archivo se pueden observar dos carriles por donde los automóviles
podrán moverse, aun no se define el sentido de los automóviles, sin embargo, este primer
ejemplo nos permite visualizar el como crear una ruta o camino.
El último campo del archivo csv, permitirá saber en que sentido puede moverse el nodo,
es decir, en el camino se podrá mover de la siguiente forma:
• R. Nodo que pertenece al movimiento de izquierda hacia la derecha

3.2 Variables de entrada
40
35
30
25
20
151--------,-----
10
5 ,__ __ _
5 1 0 i5 20 25 30 35 40 45
Figura 3.3: Muestra de creación de un camino, por medio del archivo csv
• L. Nodo que pertenece al movimiento de derecha hacia izquierda
• U. Nodo que pertenece al movimiento de abajo hacia arriba
• D. Nodo que pertenece al movimiento de arriba hacia abajo
• W. Nodo que pertenece a un crucero y puede tener múltiples sentidos
• X. Nodo que pertenece a un crucero y puede tener múltiples sentidos
• Y. Nodo que pertenece a un crucero y puede tener múltiples sentidos
• Z. Nodo que pertenece a un crucero y puede tener múltiples sentidos
• T. Nodo que permite el ingreso de automóviles a la simulación
• S. Nodo que permite la salida de automóviles de la simulación
78
• RTR. Nodo que interconecta de un movimiento que se mueve hacia la derecha y da
vuelta a la derecha
• RTL. Nodo que interconecta de un movimiento que se mueve hacia la derecha y da
vuelta a la izquierda

3.2 Variables de entrada 79
• LTR. Nodo que interconecta de un movimiento que va hacia la izquierda y da vuelta a
la derecha
• LTL. Nodo que interconecta de un movimiento que va hacia la izquierda y da vuelta a
la izquierda
• UTR. Nodo que interconecta de un movimiento que va hacia arriba y da vuelta a la
derecha
• UTL. Nodo que interconecta de un movimiento que va hacia arriba y da vuelta a la
izquierda
• DTL. Nodo que interconecta de un movimiento que va hacia abajo y da vuelta a la
izquierda
• DTR. Nodo que interconecta de un movimiento que va hacia abajo y da vuelta a la
derecha
Para mayor referencia se puede observar de forma gráfica en la figura 3.4.
R
UTR
U D
J RTL RTR UTL
LTR LTL
Figura 3.4: Tipos de direcciones en los nodos

3.2 Variables de entrada 80
3.2.3. EDIFICIOS
Las rutas predefinidas podrán tener a sus lados edificios que podrán rodear a los caminos
definidos, estos edificios se definirán mediante un archivo xml, el cual tendrá dentro de sus
definiciones el número de bloques o manzanas.
Con estos datos el simulador realizara una instancia de edificios divididos de acuerdo al
tamaño de la manzana y la orientación de la manzana, establecida por las posiciones iniciales
y finales dentro del plano cartesiano a utilizar.
Es importante que se definan los bloques de edificios en diferentes espacios que los no
dos, ya que de no ser así, se tendrán espacios en común y al ejecutar el modelo, se podrán
ver elementos que se translapan entre los vehículos y los edificios.
3.2.4. OTRAS VARIABLES
Se cuentan con varios cargadores de archivos XML para los diferentes elementos que se
utilizan dentro de la animación, independientes al cargador de tipos de agentes de tráfico, ya
explicado. Se encuentran divididos de acuerdo a la tabla 4.1
Archivo
agents.xml agentstraffic.xml audio.xml cameras.xml constans.xml lbos.xml glslshaders.xml menu.xml objects.xml skybox.xml vbos.xml ligths.xml
Cuadro 3.3: Archivos XML a cargar
Descripción
Definición para el AgentsParser original Para el cargador de agentes de tráfico Características de audio de la simulación Definición de camaras a utilizar Variables globales Definición de variables de carga de los Frame Buffer Object Características a utilizar por los shaders Interacción con el usuario Objetos diferentes de agentes que se dibujarán dentro de la simulación Variables para el pintado del skybox Definiciones para el uso de Vertex buffer Objects Definición de variables de carga de los puntos de iluminación

3.3 Procesamiento de Variables de entrada 81
3.3. PROCESAMIENTO DE VARIABLES DE ENTRADA
De acuerdo a lo cargado en las primeras fases de la simulación, ya sea mediante los
archivos .xml o .csv, ya explicados, se inicializan diversos elementos de la simulación, tales
como el audio, menu y algunos otros como los Vertex Buffer Object(VBO) y los Fragment
Buffer Object (FBO) que se explican a continuación.
Dentro de la ejecución de gráficos en el dispositivo se sigue una secuencia que va de lo
particular a lo general, es decir, se especifican los valores y las operaciones que tendrá la
ejecución gráfica, tal y como lo muestra la figura 3.5, en ella se puede observar las opera
ciones que se realizan, siendo de las primeras instancias las operaciones relacionadas a los
vértices, tales como ensamblaje e incorporación en primitivas, pasando por diferentes opera
ciones, hasta llegar a las operaciones en fragmentos, tales como texturas y coloración de los
fragmentos.
Vertices
Pixel Updates
Vertex Connectivity
· · Vertex T ransformatíon
Raster Operations
Transformed Vertices Primitive
===> Assembly and Rasterization
Colored Fragments
Fragments
Fragment · Texturing and
Co!oring .
Figura 3.5: Pipeline de ejecución en Open GL
Posteriormente se inicializan los caminos, por medio de un metodo initroads, a partir de
lo leído por el parser. Como primera fase se guardan todos los nodos con sus datos en una

3.3 Procesamiento de Variables de entrada 82
clase llamada Nade, la cual tiene como elementos: ID, posteriormente la posición del nodo
a cuatro posiciones, es decir, como vector de cuatro valores, estos cuatro valores se refieren
a las posiciones (:r,y,z) del nodo, leídos a través del archivo csv.
La última posición "w" se refiere a si el nodo se encuentra asignado u ocupado por algún
agente en ese momento, esto nos va a servir en el momento de asignar los agentes a los nodos
y posteriormente las validaciones que se realizarán durante la ejecución del simulador. Una
vez que se han leído los nodos, se guardan en una clase llamada Road que guardará los
objetos especificados como nodcs.
Dentro de las siguientes etapas se encuentra la inicialización de agentes, la cual toma co
mo lectura el ingreso de los agentes leídos mediante la carga del xml, esto lo realiza mediante
una variable global definida en el programa principal denominada agents parserTraffic, esta
variable cuenta con toda la información leida y que servira para crear los agentes, cada uno
de los agentes guarda datos tales como el modelo MD2 especificado, el número de frames
de la animación, etcétera.
Cada uno de estos agentes que hereda de la clase principal agents, se llama agentsTraftic,
especializada para el procesamiento de agentes de tráfico y en ella se guarda en una variable
global que determina el modelo a utilizar en toda la animación, es importante mencionar que
no son modelos diferentes para cada uno de los agentes, ya que de acuerdo a una variable
"clones" leída mediante el archivo xml, se determina el número de agentes a utilizar duran
te la simulación. Sin embargo estos agentes no tendrán modelos separados, sino por medio
de un VBO creado por cada uno de los frames de animación, mediante instancing se pinta
ran dentro de la simulación, proceso de pintado que se explica más adelante en el presente
documento.
NVIDIA establece el Instancing de vértices como el uso de la tecnología de graficado
que emplean las tarjetas de video, con el proposito de dibujar una gran cantidad de objetos
que cuentan con las mismas características y que se repiten en todo el rendering.
De acuerdo con la lectura de las posiciones de los agentes, conforme a cada una de sus

3.3 Procesamiento de Variables de entrada
Verte• Stream Layout
lnrunce o: Verte, n
lnstance k: Verte• l
lnstance k: Vertex 2
Instante k: Vertex n
Verte11 Fo,mat
Positíon
Normal
Te.<tul'f Coordinates -----·-Jnst¡nce lndex
Figura 3.6: Buffer de vértices en Instancing
83
actividades, deberá ser validado con lo que contiene Road, ya que aunque un automóvil
tal vez inicie su ruta en un lugar específico dentro del mapa, es esencial poder ubicar el
automóvil dentro de algún camino, por lo que se realiza el siguiente algoritmo:
1. Ejecución de initAgents
2. Llamar a metodo de clase Road para asignación de nodo, enviando posiciones iniciales
de agentes
3. Dentro del metodo de asignación de nodo
a) Extraer todos los nodes del camino que sean de tipo T o nodo de ingreso a la
simulación
b) Verificar los nodos, con la posicion del agente
e) Encontrar el que tenga la menor distancia entre posAgent y posNode
d) Asignar el nodo al Agente y marcar el nodo en su posición w con 1.0 para denotar
ocupación

3.4 Vinculación de nodos para generar rutas 84
e) Regresar el valor de la posición al agente
4. Guardar la posición regresada en el agente.
5. Continuar ejecución.
De esta forma aseguramos que los automóviles siempre esten contenidos en un camino
de inicio, y que no comiencen en posiciones alejadas del camino, sino que se procurá asignar
un nodo lo más cercano posible a su primera actividad, que es básicamente lo que funciona
en la vida real, en donde los conductores buscan la vialidad más cercana para poder dirigirse
a cada una de sus actividades.
Aunque es posible que los automóviles, puedan en su momento circular fuera del ca
mino si las condiciones físicas así se presentan, se asume dentro del presente trabajo de
investigación que es necesario que los automóviles se muevan de acuerdo a los caminos
predeterminados.
De esta misma forma, se hace una verificación de sus actividades de cada uno de los
agentes, y así como se ingresan los puntos de inicio en un nodo dentro del camino, de la
misma forma las actividades se acoplan al nodo más cercano, de acuerdo a la distancia de
sus cordenadas x,y, por lo que sabemos que iniciarán en un nodo preestablecido y finalizaran
de la misma forma dentro del camino.
3.4. VINCULACIÓN DE NODOS PARA GENERAR RUTAS
Una vez que se han definido los nodos, nos hace falta un elemento más que permita una
interconexión entre los nodos, cada uno de estos nodos necesitarán un vínculo entre ellos,
los cuales se procesarán una vez que se defina la regla de relación o vínculo entre nodos.
Necesitamos establecer una distancia mínima entre ellos, la cual nos permitirá saber si un
nodo tendra relación con algún otro. Tal y como ocurre en la vida real, un automóvil en
cierto tiempo puede moverse de un punto a otro, no necesariamente realiza un salto de un

3.4 Vinculación de nodos para generar rutas 85
punto a otro, sino que dentro del mundo real el vehículo viendolo desde el punto de vista de
un nodo, se mueve conforme la figura 3.7, en ella se puede ver los vínculos que tiene cada
uno de los nodos, para el caso del nodo con ID I se puede conectar mediante vínculo con los
nodos 8 y 2, y su vez el nodo con ID 2 tiene la capacidad de moverse al nodo 9 y 3.
Figura 3.7: Vinculas entre nodos
Sin embargo estos nodos, deberán contar con un elemento extra además de la distancia
entre ellos como criterio para poder establecer una relación entre los mismos, ya que no
en todos los caminos la distancia minima entre carriles y nodos se asume como un camino
continuo, que pasaría si el nodo número 8 tuviera un diferente sentido que el nodo número
1, no podría el automóvil moverse del nodo 1 al 8, lo que provocaría una colisión, aunque
sabemos que en la vida real las colisiones son susceptibles de ocurrir, y este es uno de los
casos, cuando un vehículo se incorpora a un carril en sentido contrario, sin embargo, la
presencia de choques en la simulación se tratará posteriormente.
Este inconveniente se puede ver graficamente en la figura 3.8.
Para resolver este problema, se han incorporado en la carga de los nodos, tal y como se
explica en la sección del ingreso de caminos o rutas , los nodos tienen un valor al final del
renglón que permite conocer el sentido estricto del automóvil, y se cuenta con diferentes
tipos, por ejemplo el movimiento hacia la derecha(R), izquierda(!), etc.

3.4 Vinculación de nodos para generar rntas 86
Figura 3.8: Vinculos entre nodos, considerando los sentidos
Existe un tipo adicional a los cuatro sentidos usuales de un automóvil y se refiere al nodo
de tipo crucero, ya que como sabemos en la vida real , los puntos que se encuentran en un
crucero permiten el movimjento en diferentes sentidos, controlados por algún tipo de señal ,
para lo cual estos nodos, de acuerdo a un tiempo predeterrrunado dentro de la simulación
pueden tener el sentido hacia la derecha, arriba, abajo, etcétera, todo dependerá de la forma
de su configuración y el tiempo destinado a acada uno de los mismos.
Se realiza un análisis como primer paso, con el propósito de definir cuales son los nodos
que pueden ser relacionados, cada uno de los nodos verifica de acuerdo a distanci a y al
parámetro del sentido, si algún otro nodo tiene relación con el mi smo, esta información se
guarda en un vector de de cuatro componentes, se asume que cada uno de los nodos puede
optar tres camjnos como máximo para continuar con su ruta.
Este vector de cuatro componentes, guarda en sus tres primeras posiciones, los datos de
los ID de los nodos que se relacionan con él, y al final como valor de control, que se usará en
el kernel y se explicará posteriormente, se tiene un valor último que guarda el número de
nodos con los que tiene relación el nodo actual.
Regresando al ejemplo de la figura 3.7, el nodo con ID 1 tiene dos opciones de mo
vimiento, inclusive un nodo del caJTil central pudiera contar con tres nodos hacia donde

3.4 Vinculación de nodos para generar rutas 87
moverse. Este mismo caso sucede cuando el nodo se encuentra pegado a su lado derecho
circulando de izquierda a derecha y pretende dar vuelta a la derecha, las únicas tres opciones
son dar la vuelta e incorporarse a la circulación de arriba hacia abajo, la siguiente opción es
continuar por el carril por donde viene, y la última sería cambiar de carril, si es que existe
otro carril al cual incorporarse a su lado izquierdo.
Para el caso de las vueltas, de acuerdo a la definición de las mismas, una conexión entre
dos nodos podrá darse si la primera letra del tipo de nodo, corresponde con la primer letra
del tipo de nodo relacionado a la vuelta, es decir, para un nodo que vaya circulando de
arriba(UP), hacia abajo (DOWN), su tipo de nodo estará denotado por la letra D, y si dentro
de su rango existe un nodo que contenga la letra D al principio, como es el caso de DTL
(Down Turn Left), se trata de un nodo que viene de la circulación de arriba hacia abajo y que
pretende dar la vuelta a la derecha, por lo que es posible tener el vínculo o la conexión entre
estos dos nodos.
Esta forma de vincular los nodos, relacionandose de forma sencilla permite que el propio
simulador realice un análisis y creación de posibles rutas, la cual no se deberá calcular en
tiempo de ejecución, ya que los posibles caminos por los que un automóvil pueda moverse
ya se encuentran pre-procesados, y dentro del kernel de CUDA que se ejecuta dentro del
GPU, solamente será necesario realizar una búsqueda de máximo tres nodos, es decir no se
deberá consultar todo el camino en búsqueda de nodos libres para su uso.
Acorde a esto necesitaremos un mecanismo de control que nos indique en que nodo se
encuentra actualmente el agente, ya que como se ha explicado en el procesamiento de varia
bles de entrada, los agentes al iniciar, así como cada una de sus actividades están regidas por
la definición de un nodo, ya que un automóvil para propósitos del simulador deberá iniciar
siempre en un punto preciso del camino y moverse de acuerdo al camino definido y finalizar
dentro de un nodo.
Dentro de dicha variable guardamos todos los agentes y el ID del nodo que los contiene,
dicha variable será utilizada al generar el movimiento en las siguientes etapas del simulador.

3.5 Generación de movimiento 88
3.5. GENERACIÓN DE MOVIMIENTO
A partir de los datos que se guardan en los agentes y rutas, posterior a la lectura de los
datos todos ellos obtenidos y procesados en el CPU, es necesario definir una forma en la que
puedan leerse y escribirse los datos en la memoria del GPU, para lo cual de acuerdo a la
figura 3.5, podemos observar que uno de los elementos que se generan como datos dentro
del pipeline del dispositivo gráfico son las texturas, las cuales nos servirán como camino
de comunicación entre la memoria del GPU y la memoria del CPU, definiendose texturas
de datos de vertices que seran utilizadas, tanto para las posiciones, las rotaciones de los
agentes, datos de posiciones de los nodos, ocupación e inclusive para guardar los datos de
las velocidades.
Una textura para OpenGL usualmente se compone en cada uno de sus pixeles, en con
creto para las texturas se llaman texels que se refieren a los componentes de color que serán
aplicados como textura de los objetos en el rendering.
Los texels que componen las texturas guardan los cuatro elementos de color de la unidad,
y se forma de RGBA, que hacen referencia a los colores rojo, verde, azul y el componente
de transparencia asociado a un color, en nuestro simulador se utiliza esta posibilidad que
se tiene gráficamente de guardar las posiciones en las texturas y adicionalmente se guardan
algunos otros elementos, como es el caso de los destinos.
En la figura 3.9 se puede observar como se llenan los datos correspondientes a las posi
ciones de los agentes, realizando la multiplicación del ancho por el alto de la textura esta se
debera generar con un valor mayor al número de agentes, siempre respetando la estructura
cuadrada de la textura, es decir, contar con el mismo ancho y el mismo alto, con el propósito
de homogeneizar lo leído por el simulador.
Al trabajar con texturas es necesario que los datos que se escriban tengan una estructura
cuadrática, es decir, como lo indicamos en el parrafo anterior los valores se guarden de
acuerdo a un mismo ancho y alto para lo cual se busca en primera instancia la raiz cuadrada

3.5 Generación de movimiento
EJ Pos.tuoncs.de ,1gentc'.)
Figura 3.9: Textura y sus componentes
89
entera que cubra en su totalidad el número de agentes, o en su defecto que sea mayor. Por
ejemplo si dentro del archivo xml se declaran 28 agentes, la raiz cuadrada entera sería 5, sin
embargo, 25 no cubre en su totalidad el número de agentes, por lo que se toma el siguiente
número 6, por lo que la textura se genera con un ancho de 6 elementos y 6 puntos por alto, y
se guardan las posiciones de los agentes en los 28 primeros texels, resultando los 8 restantes
con valores que se completan con 0.00, como se puede observar en la imagen 3.1 O.
A partir de la transposición de las texturas, es necesario un elemento que dentro del si
mulador permita las operaciones a nivel vertice y controlar la forma en la que se pintarán
los agentes en el simulador a nivel de Fragment Buffer Object y los Vertex Buffer Object.
En este sentido se tienen códigos establecidos en forma de shader, para una correcta inter
pretación un shader es un código escrito en lenguaje de Open GL Shading Language, que
nos permite explorar las capacidades y utilizar las posibilidades de ejecución de código en
el dispositivo gráfico y que se utilizarán en primera instancia antes de la llegada de CUDA.
Para el simulador se utilizan con el propósito de contar un mecanismo de posicionamiento
de agentes, así como rotaci 'n y opciones propias del graficado, como coloración y textura.
Gracias a esta implementación es posible contar con una relación entre lo manejado en el
shader y CUDA realizando una actualización de los datos guardados en la textura asociada

3.5 Generación de movimiento
Agcntes 0 28
Cclda5Totalcs 0 36
Cr.ldasdesocupadas0 · 8
Ancho e 6
Alta e G
Figura 3.10: Ejemplo del llenado de la textura
90
al shader y tener ese cambio también en la textura que se lee directamente por CUDA, lo que
nos permite una mayor rapidez y eficiencia en la ejecución de la simulación.
Ya que mantenemos el traslado de las texturas, es necesario inicializar los elementos pro
pios del tráfico, para lo cual se especifican los valores y se inicializa un manejador de VBOs
explicado anteriormente, el cual generará los elementos necesarios de memoria que se com
partirán entre el simulador ejecutandose en el CPU y los datos necesarios para el movimiento
dentro del GPU, todo esto a través de vertices, es por esta razón que fue necesario utilizar un
manejador de Vertex Buffer Objects.
Posteriormente se ejecuta el nucleo o kernel de CUDA por primera vez, con el propósito
de que se actualicen los datos de las posiciones por primera vez, y realizar el pintado en
primera instancia, de acuerdo a lo establecido en el kernel de CUDA, al correr este metodo
se realizan una serie de pasos, como se muestra a continuación.
l. Se establecen diversas variables de tipo Vértice.
2. Se inicializa una variable de recurso de Cuda que nos permitirá obtener valores de

3.5 Generación de movimiento 91
CUDA al CPU de tipo CudaGraphicsResource, la cual constará de diversos elementos
de un arreglo de acuerdo a las variables inicializadas anteriormente, esta variable es
la base de recursos que utiliza la APi de cuda para ejecutar diversos comandos en el
CPU, para obtener los valores de CUDA [35]
3. Con la instrucción CudaGraphicsMapResource, se mapean los valores de las textu
ras establecidas en la inicialización de la variable mediante CudaGraphicsResource,
dentro de la propia variable res
4. Se inicializan las variables necesarias que guardarán el tamaño de los datos a obtener,
ya que como se ha mencionado anteriormente el espacio a ocupar por los valores que
se utilizan durante la ejecución es indispensable para CUDA, derivado al manejo de la
memoria y los datos que realiza.
5. Mediante el llamado al método cudaGraphicsResourceGetMappedPointer, se obtienen
los valores de posiciones, puntos de control y actividades, entre otros guardadas ante
riormente en las texturas, dentro de las variables de tipo Vertex .
6. Se llanza el kernel o función principal de CUDA, el cual se explicara en mayor pro
fundidad posteriormente.
7. Se realiza la ejecucion del metodo cudaGraphicsUnmapResources, que nos permite
limpiar la variable res, y liberar la memoria y los datos asignados a la misma, ya que
de no ser así los valores obtenidos mediante este recurso de CUDA se continuarán
guardando pudiendo llegar a un desbordamiento de memoria o errores de acceso por
la presencia de datos que ya no se están utilizando.
Dentro de cuda es necesario incoporar el código de forma que su ejecución se pueda
realizar de forma paralela, para lo cual se ha tratado de acoplar lo más posible los datos
dentro del Kernel de CUDA ya que el mismo mantiene un gran rendimiento para la ejecución

3.5 Generación de movimiento 92
que se pueda realizar muchas veces al mismo tiempo con un gran nivel de procesamiento,
por lo que se decidio continuar con el mismo esquema de generar los datos de vectores de las
variables por medio de las instrucciones antes mencionadas y poder definir el movimiento
del vehículo de acuerdo al offset predeterminado por CUDA.
Posteriormente necesitamos tener un elemento en común que nos permita dentro del
kernel de CUDA ejecutar en múltiples ocasiones por los diferentes threads o hilos. Para el
caso del movimiento utilizamos la ejecución de una rutina global, la cual tendra el número
de hilos dependiendo del número de agentes que se obtenido, y que se obtiene del producto
del ancho y alto de la textura para lo cual nuestro bloque de hilos estará en proporción al
tamaño de la textura a utilizar.
Se necesita así mismo un mecanismo que nos permita leer los datos de los nodos los
cuales deberán ser transversales a toda la ejecución, el hecho de ser transversales nos permi
tirá que la ejecución de cada hilo, a pesar de que se realiza de forma paralelizada, tenga un
modo en común que nos permita leer las posiciones de los nodos y su disposición.
Se ha buscado ingresar una única vez, la posición de los nodos a la memoria del GPU,
ya que dicha posición no cambia durante la ejecución, lo que sufrirá modificación se refiere
a la posición de los agentes, su estado, y la ocupación de los nodos.
Uno de los primeros intentos se establecio ejecutando un solo kernel que guarde los da
tos en la memoria compartida(SHARED GPU MEMORY) con el proposito de que sea leído
por otro kernel dentro de su ejecución, sin embargo la memoria compartida se establece
como una forma de compartir datos entre los diferentes hilos de ejecución a través del pro
cesamiento del kernel, sin embargo, al tener dos diferentes tipos de kernel (inicialización y
ejecución), no es posible de acuerdo a la propia especificación de CUDA enviar datos entre
diferentes kernel.
Por lo anterior se ha optado utilizar la misma memoria global obtenida de las propias
texturas, pero en el mismo nodo de ejecución, es decir, cada que se ejecuta el kernel, se
envían una serie de datos:

3.5 Generación de movimiento 93
1. Datos de posiciones iniciales. Contienen las posiciones de los agentes en el inicio de
la simulación, así como datos de pertenencia a los nodos, variables de control de los
agentes, entre otros.
2. Ancho de la textura de posiciones. Contiene el tamaño de la textura, para el asigna
miento de memoria de CUDA.
3. Alto de la textura de posiciones. Contiene el tamaño de la textura, para el asignamiento
de memoria de CUDA.
4. Tiempo. Nos permite saber en que momento de la ejecución nos encontramos y con
trolar aspectos de las curvas de bezier, los movimientos en los cruceros, entre otros.
5. Velocidades. Velocidades obtenidas aleatoriamente en la inicialización de CUDA y
que se enviarán como datos de velocidades maximas para cada uno de los agentes,
para lo cual el tamaño del parámetro concide con el de las posiciones enumerado en la
primera posición.
6. Metas . Este elemento guarda los datos de posición de la primera actividad diferente a
la posición de inicio definida en las primeras etapas.
7. Datos de nodos. Guarda las posiciones de los nodos, así como la bandera de ocupado/
libre para cada uno de los nodos.
Es importante mencionar que como se ha mencionado anteriormente la asignación de me
moria durante la ejecución de los kernel es muy importante no se realiza de forma dinámica,
es decir, al momento de enviar los datos a la memoria del GPU deberán ya tener un ancho
predeterminado, para lo cual desde un inicio se configuran los agentes, posiciones iniciales
y las características de los nodos, así como el pre-procesamiento de las posibles rutas
Así mismo la mayoría de estos datos se envían en forma de vértices al kernel de CUDA,
a excepción de los parámetros de ancho, alto y el tiempo, los cuales son valores numéricos.

3.5 Generación de movimiento 94
Una vez que los datos e encuentran dentro del kernel de CUDA, la ejecución paralelizada
se realizará para cada uno de los agentes dentro de un hilo asignado a cada uno de ellos,
para lo cuai se tendrá la asignación de la memoria compartida para guardar los datos en
común de los nodos que utilizarán todos los hilos. Esta asignación se ha realizado tomando en
cuenta dos aspectos: el primero se refiere a que la memoria compartida puede ser consultada
por todos los hilos en la ejecución, los nodos al ser un elemento transversal para todos los
agentes, será necesario que se consulten al mismo tiempo por cada uno de los hilos.
En el momento en el que un nodo sea ocupado, deberá ser actualizado su último cam
po y no podrá ser utilizado por ningún otro agente, sin embargo este proceso se explica a
continuación. Continuando con las razones de utilizar la memoria compartida, la segunda se
refiere al hecho de que la diferencia entre la rapidez de consulta entre las memorias global
y compartida se puede observar en la figura 3.11, el acceso a memoria para un bloque de
terminado se realiza más rapido para la memoria compaitida, ya que se encuentra asignada
dentro del mismo bloque de hilos de ejecución.
Figura 3.11: Diagrama de ejecución en CUDA y sus diferentes tipos de memoria
Una vez que hemos asignado la memoria compartida para los nodos, se hace una ejecu
ción paralelizada de cada uno de los agentes, por cada uno de los hilos, con el propósito de
contar con datos siempre actualizados entre la ejecución del simulador es necesario incluir

3.5 Generación de movimiento 95
dentro del kernel, el comando synctheads() que nos permite tener una sincronización de los
datos actualizados por cada uno de los hilos en los demás durante la ejecución.
Se realiza la ejecución del siguiente algoritmo en el kernel de cuda, para cada uno de los
agentes, este algoritmo es el que nos permitirá de forma central controlar el movimiento de
los vehículos y que se ejecutará en cada paso de la ejecución el cual enviará las posiciones
al shader para el movimiento gráfico de los automóviles en la simulación.
1. Se obtiene el agente a procesar por el hilo, mediante un índice
2. Con ese índice, se busca dentro de la variable que guarda las posiciones de los agentes
y los nodos, cual es el ID del nodo que contiene ese agente en ese momento.
3. Se busca dentro de la variable que contiene las relaciones de los nodos con otros no
dos, es importante mencionar que dicha búsqueda no será de más de tres elementos,
de acuerdo a lo explicado anteriormente, ya que cada uno de los nodos, tiene como
máximo tres vínculos con algún otro nodo.
4. Si se tiene algún nodo libre se asigna en su último elemento un l.O con el propósito
de marcarlo como ocupado, y al mismo tiempo se desocupa el nodo en el que se
encuentra, y en este mismo paso se actualiza la posición del agente con la posición
del nodo escogido.
5. De no contar con algún nodo libre el agente mantiene su posición actual hasta que
encuentra en alguno de los siguientes ciclos, algún nodo que pueda ocuparse.
6. Se envía el ángulo de rotación del agente conforme a una relación trigonométrica, de
acuerdo al movimiento generado, entre la posición actual y la posición futura, es decir
el automóvil se alineará de acuerdo al movimiento generado. Este dato se envía al
shader que pintará el modelo, de acuerdo al ángulo de rotación dado en grados.
Para la asignación de un nodo si se encuentra ocupado o inclusive libre, se ejecutaron
tres tipos de sentencias, de acuerdo a lo estipulado por el manual de programación en CUDA

3.5 Generación de movimiento 96
que nos permiten que los datos se den de forma sincronizada y que los threads esperen a
contar con un nodo realmente desocupado, estas tres instrucciones se les envían los datos de
acuerdo a lo siguiente:
1. AtomicAdd. Se envían como parámetros la dirección de memoria del dato a actualizar
y el valor a sumar.
2. AtomicSub. Se envían como parámetros la dirección de memoria del dato a actualizar
y el valor a restar.
3. AtomicCas. Se envían como parámetros la dirección de memoria del dato a actualizar
y el valor a comparar.
4. AtomicExch. Se envían como parámetros la dirección de memoria del dato a actualizar
y el valor a establecer.
En los primeros dos casos se aplica una operación aritmética ya sea de suma o resta
dependiendo de lo utilizado y en el tercer caso se compara si el valor del nodo se encuentra
ocupado, también en una operación atómica, para el último caso se guarda en la dirección de
memoria envíada el dato que se envía como segundo parametro.
4. RESULTADOS Y CONCLUSIONES
Se ha trabajado el simulador de tráfico con una tarjeta NVIDIA GeForce GT 540M de
2Gb, con un procesador Intel Core i3-23 IOM con una velocidad de 2.1 O Ghz, los lenguajes
de programación utilizados son OpenGL, c++, CUDA y GLSL.
Se ha utilizado para el desarrollo las versiones de Visual Studio 2008, Open GL 3.1 y
para el caso de CUDA la versión 4.0.
En un principio se desarrollaron diferentes comportamientos de tráfico involucrando so
lamente el uso de OpenGL para la simulación y dibujando cada uno de los modelos por
medio del cargador de objetos GLM.
Los resultados se han verificado de forma visual y a nivel de código, inspeccionando las
variables asociadas al movimiento de los vehículos, tanto en cuda como dentro de de Visual
Studio.
Para el caso de los resultados se inspeccionan tres casos principales, los cuales represen
tarían en un 70 % lo que sucede en el tráfico real, los cuales son los siguientes:
1. Camino con un único carril y un sólo sentido
97

3.5 Generación de movimiento 98
2. Camino con dos carriles, cada uno con sentidos contrarios
3. Crucero
Estos tres casos, replicandolos "n" número de veces podríamos ver el comportamiento
en gran medida de lo que usualmente se puede observar en el tráfico común.
Por ejemplo si quisieramos definir un camino que tenga tres carriles, en los cuales cada
uno de los carriles vayan todos al mismo sentido, se podría replicar el archivo csv de ru
tas utilizando el primer ejemplo del camino de un solo carril y un solo sentido, solamente
cambiando las coordenadas para generar tres carriles diferentes.
De acuerdo a lo establecido en el simulador se puede generar este camino sin ninguna
problemática.
Así mismo si quisieramos el mismo camino que tenga seis carriles, con tres carriles
moviendose hacia un sentido y tres carriles hacia otro sentido, inclusive intercalados como
ocurre en algunos tipos de vueltas, se replicaría lo establecido en el segundo caso de las
pruebas realizadas en este trabajo.
Otro caso que se puede modelar sin problemas, es el relacionado a movimientos en diago
nal, ya que aunque no se establezcan movimientos en los sentidos explicados anteriormente
(arriba, abajo, derecha, izquierda) simplemente estableciendo el camino con una ideología
de movimiento en diagonal se puede generar este movimiento simplemente respetando los
sentidos mediante los cuales los carriles se moverán.
Finalmente replicando y combinando estos casos y el del crucero, podría establecerse
una ciudad que contenga diversos elementos de movimiento.
Se han incorporado para los tres casos un número de I 00 agentes que se mueven dentro
del camino definido, tal y como se ha explicado anteriormente estos automóviles se incor
poran en una posición al interior de los nodos que se define como nodo de entrada a la
simulación.
Estos automóviles, siguen una ruta que va dependiendo de los enlaces o links que tendrá con

3.5 Generación de movimiento 99
los nodos conforme se va moviendo. La metodología de movimiento es buscar el nodo que
se encuentre libre más cercano, sin impo1tar que se necesite un cambio de carril o que se
realice una incorporación a otro de los sentidos.
Para el primer caso de estudio, el camino establecido solamente contiene nodos que van
en un solo sentido de derecha a izquierda con una separación entre nodos que permita que el
movimiento de los vehículos se realice sin que se realice una colisión entre ellos, de acuerdo
al módelo predefinido.
De la misma forma estos nodos son subsecuentes, ya que permiten que el vehículo se
mueva de un ponto inicial a un punto final, solamente involucrando las coordenadas en x,
ya que las coordenadas predefinidas en y, serán fijas durante todo el camino y solamente
permitirán que el automóvil se pueda mover de izquierda a derecha.
rn:
'1501
125!
100' l
75,
sl 25lR Rl R R R R R. R R R R R R R R R R R R
O'
O 25 50 75 100 125 150 175 100 225 150 27í lOO ll5 150 175 4C-O 41í
Figura 4.1: Especificación del movimiento de un solo carril de izquierda a derecha en posiciones (x,y)
En la figura 4. l se visualiza la definición del camino en términos del camino a generar,
cada uno de los nodos, tiene una separación que permita que los vehículos se puedan mover
y como se estableció en la definición de los caminos, los nodos están definidos de tipo R,

3.5 Generación de movimiento 100
es decir que se podrá mover con dirección a la derecha (Right), y los nodos permitirán un
movimiento continuo del vehículo a través de ellos.
Es importante comentar que si un vehículo se encuentra con un nodo de sentido contra
rio, no podrá continuar su flujo y buscará el nodo más cercano que le permita continuar su
movimiento, en este caso si el vehículo se encuentra con un nodo de sentido contrario, en ese
momento se detendrá ya que no cuenta con otros carriles o sentidos que le permitán moverse.
Tal y como lo muestra la figura 4.2, se explora la posibilidad de establecer un nodo
de sentido contrario, para este caso el automóvil se encuentra moviendo con sentido a la
izquierda y al querer incorporarse al crucero se encuentra con un nodo de sentido contrario,
por lo que el automóvil se detiene en este nodo y deja de moverse, provocando que los
automóviles que vienen detrás de él también se detengan.
Figura 4.2: Caso de estudio cuando un nodo se encuentra con un nodo de sentido contrario sin ninguna opción de movimiento
Así mismo se han establecido dos manzanas o blocks de edificios que rodean este carril
los cuales se han predefinido en un archivo xml con sus coordenadas x,y de inicio y de final,
cuidando que no obstruyen el camino a seguir por los automóviles.
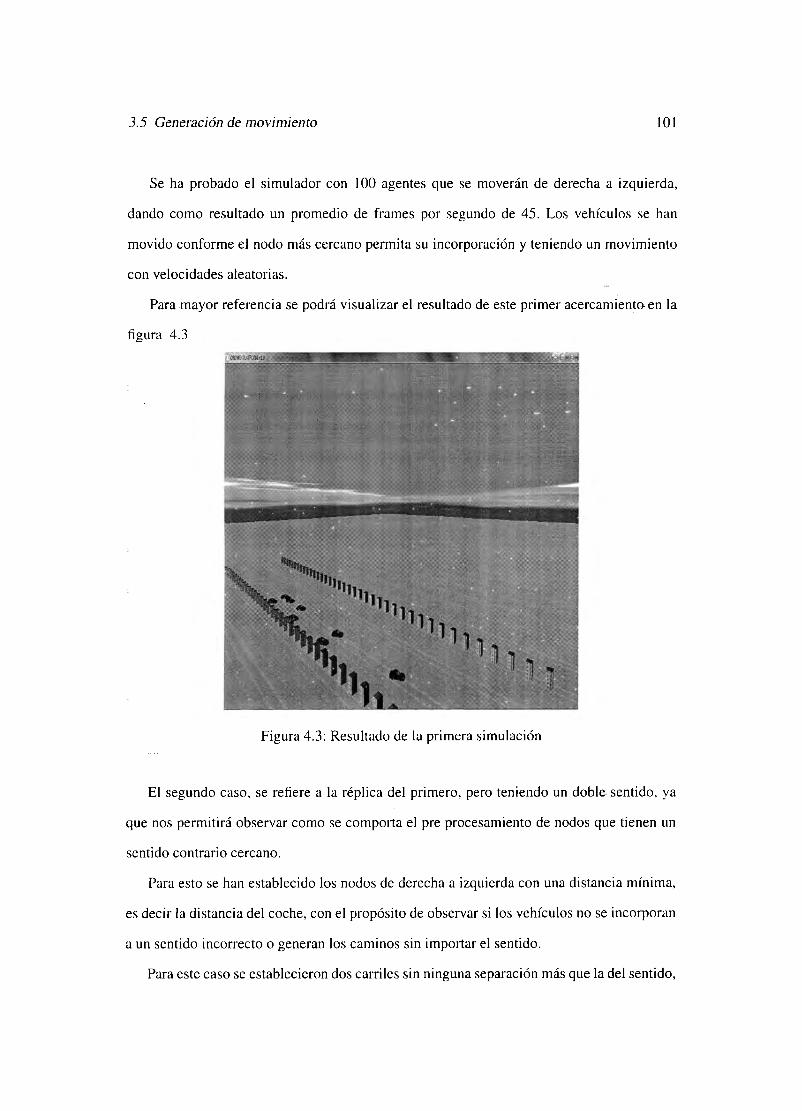
3.5 Generación de movimiento 101
Se ha probado el simulador con 100 agentes que se moverán de derecha a izquierda,
dando como resultado un promedio de frames por segundo de 45. Los vehículos se han
movido conforme el nodo más cercano permita su incorporación y teniendo un movimiento
con velocidades aleatorias.
Para mayor referencia se podrá visualizar el resultado de este primer acercamiento en la
figura 4.3
Figura 4.3: Resultado de la primera simulación
El segundo caso, se refiere a la réplica del primero, pero teniendo un doble sentido, ya
que nos permitirá observar como se comporta el pre procesamiento de nodos que tienen un
sentido contrario cercano.
Para esto se han establecido los nodos de derecha a izquierda con una distancia mínima,
es decir la distancia del coche, con el propósito de observar si los vehículos no se incorporan
a un sentido incorrecto o generan los caminos sin importar el sentido.
Para este caso se establecieron dos carriles sin ninguna separación más que la del sentido,

3.5 Generación de movimiento 102
tal y como se da en muchos de los caminos que se dan en la vida real, indicando movimientos
hacia la derecha y hacia la izquierda con separación de los nodos en las coordenadas x
continuas, y solo dos cambios en las coordenadas y, tal y como lo muestra la figura 4.4. En
ella se puede observar la definición de los nodos de tipo L(left) y R(right) que conformaran
nuestro camino y por donde los automóviles podrán desplazarse.
~-!
200! i
mi !
150!
m! 100!
75l
50llll l l L l
25RRRRR R R R R R R R R
o 25 so 1s 100 m !)() m 200 m 250 m 100 m J5o m 400 425
Figura 4.4: Especificación de nodos en posiciones (x,y) en dos carriles con sentidos contrarios
De la misma forma que el primer caso se probó el movimiento de 100 vehículos con rutas
de derecha a izquierda y en sentido contrario. Se observo un buen desempeño del simulador,
ya que en ningún momento los vehículos ocuparon el sentido contrario y así mismo mostra
ron una buena continuidad de movimiento sin colisiones y corriendo de la misma forma con
un promedio de 45 fps.
El resultado de esta simulación se observa en la figura 4.5 .
Finalmente el último caso, el caso del crucero es más complejo de definir, ya que las
variables a utilizar fueron más numerosas, en este caso se estableció un nuevo tipo de nodos
que nos permitien realizar la simulación correctamente, fue necesario la incorporación de

3.5 Generación de movimiento 103
Figura 4.5: Resultado de la segunda simulación
nodos de tipo crucero, los cuales solamente involucran dos tipos de movimiento.
Es importante mencionar que los nodos y la construcción de los caminos fueron pensados
en la ideología americana de los sentidos, es decir los automóviles circulan pegados a su lado
derecho y a partir de esto todas las derivaciones posibles.
En la figura 4.6, se visualizan los tipos de nodos necesarios para definir un crucero con
una estructura usual dentro de lo visto en la vida real. Los nodos necesarios para el centro
del crucero son los siguientes:
1. W. Permite un movimiento en crucero y que podrá tener dos sentidos: el sentido de
dirección hacia la derecha y el sentido de dirección hacia abajo, es decir estos tipos de
nodos podrán tener interconexión o vínculos con los nodos de tipo R y los nodos de
tipo D
2. X. Permite un movimiento en crucero y que podrá tener dos sentidos : el sentido de di-

3.5 Generación de movimiento 104
rección hacia la derecha y el sentido de dirección hacia arriba, teniendo interconexión
con los nodos tipo R y tipo U.
3. Y. Permite un movimiento en crucero y que podrá tener dos sentidos : el sentido de di
rección hacia la izquierda y el sentido de dirección hacia abajo, teniendo interconexión
con los nodos tipo L y tipo D.
4. Y. Permite un movimiento en crucero y que podrá tener dos sentidos : el sentido de di
rección hacia la izquierda y el sentido de dirección hacia arriba, teniendo interconexión
con los nodos tipo L y tipo U.
o 25 50 75 O -200 90 125 T ·100 O ·75 T
.i5 1 ·175 90 125 R -100 O -50 O
-50 f 2 -150 90 125 R -100 O -15 O
-15 D l -125 90 125 R -100 o 00
D 4-100 90 125 W -100 o 2i o 25 D 5 -75 90 125 W -100 O 150 D
50 l l l y y z 6 ·50 90 125 X -100 O 1750
i5 l l l l ,· L y 2 z 7 -25 90 125 X -100 O 200 S
100 R R R w w X X 8 o 90 115 R -100 O -7i T
12i R R 9 25 90 125 R -7i O -50 O
150 10 50 90 125 R -7i O -2i D
17i 11 75 90 115 5 -7i o O D
200 12 -200 90 100 T ·/) o 25 O
125 1l -175 90 100 R .75 O 150 O
250 14 -150 90 100 R ·/) o 17í o 275 15 .125 90 100 R -75 O 200 S
300 16 -100 90 100 W .50 O -75 T
315 17 .75 90 íOOW -so O ·SO O
350 18 -50 90 100 X .50 O -2í D
375 19 -25 90 100 X .50 o O D
20 o 90 100 R .50 o 25 D
21 2i 90 100 R .50 O 150 D
22 50 90 100 R .50 O 17í D
Figura 4.6: Dibujado del camino para el caso del crucero y coordenadas (:¡;,y)
Cada uno de estos tipos de nodos también tendrá interconexión con ellos mismos, de
acuerdo a las siguientes reglas:
Finalmente en las figuras 4.7, 4.8, 4.9 y 4. 10 se puede observar la simulación en
ejecución para el caso 3 del crucero.

3.5 Generación de movimiento
Cuadro 4.1: Nodos tipo crucero y sus enlaces
Nodo origen Conexion I Conexion 2
W X RD X y
z
4.0.1. CONCLUSIONES
z w y
UD LD LU
105
Para el desarrollo de esta tesis se exploraron diferentes comportamientos del tráfico, fi
nalizando con la ejecución de tres casos principales.
Esta ejecución se realizo explorando las capacidades tanto de graficación e imagen de
la tarjeta gráfica, así como el poder de cómputo asociado al GPU, dando como resultado un
simulador que es altamente parametrizable mediante los archivos xml y que permite tener
una ejecución de forma dinámica de las diversas variables de simulación de tráfico.
Se puede obtener datos en tiempo real de la simulación de tráfico ya sean visuales o en
forma de datos que nos permiten conocer de que forma puede desarrollarse el tráfico en cierta
área que cuente con determinadas características.
Así mismo el simulador se ejecuto por arriba de 30 cuadros por segundo desde algunos
cuantos de agentes, decenas, cientos e inclusive miles, llegando hasta 10 mil agentes eje
cutandose ya en un promedio de 15 frames o cuadros por segundo, para lo cual dentro de
un cuadrante pequeño I O mil agentes en una vialidad puede denotar en gran medida lo que
sucede en el tráfico real de una urbe.
Es importante comentar que se tuvieron diversos retos en el transcurso del desarrollo de
la simulación, dentro de los principales se podrían enumerar los siguientes y las soluciones
desarrolladas:
1. Archivos CSV. Se incorporaron al parser de archivos xml, tinyxml, como metodos
dentro del parser, un lector de archivos csv, para diversas rutas.
2. Movimiento en CUDA. Lo mas importante para CUDA es la forma en la que se ma-

3.5 Generación de movimiento 106
Figura 4.7: Imagen I para la ejecución del simulador para el crucero
nejara la memoria, mediante el paradigma orientado a datos, ya que es necesario tener
bien establecido las variables y el espacio a ocupar, asi como su homogeneizacion de
datos, ya que de no ser asi. la ejecucion de los mismos es erronea.
3. Interconexion VBO-CUDA. Ya que los datos leídos en el VBO manager se actualizan
en CUDA, fue necesario llevar un control puntual de los datos ingresados en los dos.
4.0.2. TRABAJO A FUTURO
Dentro del simulador aun quedan diversas cuestiones que no se han logrado obtener y
que forman parte del trabajo que se puede desarrollar en un trabajo a futuro dentro del pro
pio simulador, estos casos que no se han explorado permitirían obtener un simulador más
robusto que contemplará en gran medida la gama de posibilidades que se pueden ver en el

3.5 Generación de movimiento 107
Figura 4.8: Imagen 2 para la ejecución del simulador para el crucero
tráfico real y ayudar en la investigación y aplicacion de nuevas rutas, caminos, vialidades,
inclusive desde su concepción y ahorrando presupuesto que puede ser utilizado de otra for
ma o aplicándolo en rutas de vialidades que realmente se encuentre probado mediante el
simulador que funcionen.
Algunos de los casos sería el poder realizar la incorporación de un mayor tipo de movi
mientos o casos de estudio tales como cruceros con semáforos parametrizables y que puedan
ser controlados por tiempos predefinidos de los mismos, los cuales permitiría un estudio más
profundo de la incidencia de señales de tránsito en el control vehicular, estudiando tiempos
de incidiencia, manejo de secuencias, tipos de semáforos, etcétera.
Otro aspecto importante sería incorporar todos aquellos datos que se pueden observar
en la ejecución del simulador, tales como posiciones de los agentes en determinado tiempo,

3.5 Generación de movimiento 108
Figura 4.9: Imagen 3 para la ejecución del simulador para el crucero
comportamientos, tiempo de desplazamiento, es trascendental poder observarlos a manera
de estadística en un archivo de texto o inclusive CSV como los archivos de ingreso de datos,
que inclusive puedan servir como entrada a otros sistemas o como parámetros de medición
de comportamiento.
Otro aspecto puntual que se da mucho en el tráfico cotidiano es el de tipo de conducción
o tipos de manejo entre la población, para lo cual el mismo simulador nos podría permitir
observar de que forma impacta el tipo de conducción de los habitantes de una ciudad y cual es
la incidencia de determinados tipos de manejo en la fluidez, accidentes, congestionamientos
y generación de conflictos.
Otra cuestión que puede desarrollarse a futuro es la variedad en los modelos a ocupar,
es decir, al hablar de un simulador gráfico es importante que lo que se pueda observar sea

3.5 Generación de movimiento 109
Figura 4. 1 O: Imagen 4 para la ejecución del simulador para el crucero
llamativo para los usuarios, ya que de esta forma es posible contar con una herramienta con
variedad de edificios, vehículos, inclusive camellones, banquetas, entre otros, por lo cual
sería importante la incorporación de más modelos en la simulación.

BIBLIOGRAFÍA
[l] SUIPING ZHOU, DAN CHEN, W. C. L. L. M. Y. H. L., ANO TIAN, F. Crowd mode
ling and simulation technologies. ACM Trans. G1: 21, 3 (20010), 1-35.
[2] FORSYTH, D. Group dynamics. 355-361.
[3] GWYNNE, S., E. G. M.O. P. L., ANO FILIPPIDIS, L. A review of the methodologies
used in the computer simulation ff evacuation from the built environment. building and
environment.
[4] K., M. Die evakuierung von personen aus gebauden nach wie vor ein nationales und
intemationales problem. 741-749.
[5] G., D. Comparing extremism propagation pattems in continuous opinion models. 1-9.
[6] SAAD ALI, M. S. A langrangian particle dynamics approach for crowd flow segmen
tation and stability analysis. 1-6.
[7] PARKE, F. l. Computer generated animation of faces. In ACM annual conference
( 1999), vol. 21, pp. 451-457.
[8] REYNOLDS, C. Flocks, herds and schools: A distributed behavioral model.
[9] REYNOLDS, C. Hierarchical model for real time simulation of virtual human crowds.
[ 10] ZHANG BEN, SHANG LEI, C. D. A sludy on the lraffic intersection vehicle emission
base on urban microscopic traffic simulation model. 789-7949.
[ 11] HUANG WEINAN, SUN HAN, L. K. A multiple representation entity-based approach
to hybrid traffic simulation model. 7-12.
[ 12] DIRK HELBING, M. T. Numerical simulation of macroscopic traffic equations. 89-99.
110

BIBLIOGRAFÍA 111
[13] H., D. S. Ecuaciones Diferenciales Parciales. http://www.branchingnature.org, 2012.
f 141 KANG-CHING CHU, LI YANG, R. S. C. S. Yalidation of stochastic traffic flow model
with microscopic traffic simulation. 672-677.
[15] NUALART, D. Stochastic Processes. mat.ub.es, 2007.
[ 16] RODRIGUEZ, T. Procesos estocasticos. http://centros.edu.aytolacoruna.es/maristas/Apuntes
Estadistica P3.pdf, 2012.
[ 17] D. KIM, W. CHUNG, S. P. Practica) motion planning for car-parking control in narrow
environment. 129-139.
[ 18] KAZUO TANAKA, T. K. Intelligent control of a car with n trailers trajectory stabili
zation and ga-based path planing. 250-254.
[ 19] SIMON THOMPSON, S. K. Continuos curvature trajectory generation with obstacle
avoidance for car-like robots. 1-8.
[20] KATO YUMIKO, H. M. Vehicle control device and vehicle control method. 1-9.
[21] ARVIND THIAGARAJAN, JAMES BIAGIONI, T. G. J. E. Cooperative transit trac
king using smart-phones. 85-99.
[22] ARNE KESTING, MARTIN TREIBER, D. H. Connectivity statistics of store-and
forward intervehicle communication. 172-181.
[23] STEFAN K. GEHRIG, F. J. S. A trajectory-based approach for the lateral control of
car following systems. 3596-3601.
[24] TRUCK, R. Principie of ackerman steering. http://www.rc-truckncar-
tuning.com/ackerman.html, 2007. [Online; accessed 15-mar-2012].

BIBLIOGRAFÍA 112
[25] JASON SEWALL, DAVID WILKIE, M.C. L. Interactive hybrid simulation of large
scale traffic. 135:1-11.
[26] GARAVELLO, M. Onfiuido-dynamic modelsfor urban traffic. Dipartimento di Scien
ze e Tecnologie Avanzate Universita del Piemonte Orientale A Avogadro, 2007.
[27] TOBIAS KIESLING, J. L. Towards time-parallel road traffic simulation. 1-9.
[28] AMD. Power Processing with the Microsoft Windows Compute Cluster Server.
http:/ /developer.amd.com/Membership/Print. aspx? Article1D=53, 2003.
[29] JIANKUN WU, LINPENG HUANG, J. C. M. L. X. W. Research on grid-based traffic
simulatino platform. 1-8.
[30] MICHEL FERREIRA, RICARDO FERNANDES, H. C. W. V. O. K. T. Self-
organizated traffic control. 85-89.
[31 J NVIDIA. NVIDIA CUDA programmg zone.
http://www.nvidia.com/object/cudahomenew.html, 2012.
[32J KALYAN S. PERUMALLA, BRAMDON G. AABY, S. B. Y. S. K. S. Gpu-based real
time execution of vehicular mobility models in lartge-scale road network scenariosl.
95-103.
[33] JOHN D. OWENS, MIKE HOUSTON, D. L. S. G. J. E. S. J. C. P. Gpu computing.
879-899.
l34J DAVID STRIPPGEN, K. N. Multi-agent traffic simulation with cuda. 741-749.
[35] NVIDIA. CUDA API REFERENCE MANUAL. Doxygen, 2012.





























