Embed Size (px)
Citation preview

03/11 MN04003007Z-DEHandbuch
ea
sy
800
CANopen-Optionskarte OPTC6für Frequenzumrichter 9000X
Eaton CorporationEaton ist ein führendes Energie-Management-Unternehmen. Weltweit ist Eaton mit Produkten, Systemen und Dienstleistungen in den Bereichen Electrical, Hydraulics, Aerospace, Truck und Automotive tätig.
Eatons Electrical SectorEatons Electrical Sector ist weltweit führend bei Produkten, Systemen und Dienstleistungen zu Energieverteilung, sicherer Stromversorgung und Automatisierung in der Industrie, in Wohn- und Zweckbauten, öffentlichen Einrichtungen, bei Energie-versorgern, im Handel und bei OEMs.
Zu Eatons Electrical Sector gehören die Marken Cutler-Hammer®, Moeller®, Micro Innovation, Powerware®, Holec®, MEM® und Santak®.
www.eaton.com
Eaton Adressen weltweit:www.moeller.net/address
E-Mail: [email protected]: www.eaton.com/moellerproducts
www.eaton.com
Herausgeber: Eaton Industries GmbHHein-Moeller-Str. 7–11D-53115 Bonn
© 2002 by Eaton Industries GmbHÄnderungen vorbehalten03/11 MN04003007Z-DE xx/xx/Ki 0x/02Printed in Germany (0x/02)Artikel Nr.: xxxxxx
4 *patpks#nycmyn*
Rück
enb
reite
4 –
6 m
m (1
Bla
tt =
0,1
06
mm
für
XB
S D
igita
ldru
ck)
(1 B
latt
= 0
,08
0 m
m f
ür E
ber
wei
n D
igita
ldru
ck b
ei 8
0 g
/m2)
PROFIBUS-DP-Optionskarte für Frequenzumrichter 9000X 08/07 MN04003006Z-DE www.eaton.com
Alle Marken- und Produktnamen sind Warenzeichen oder eingetragene Waren-zeichen der jeweiligen Titelhalter.
StörfallserviceBitte rufen Sie Ihre lokale Vertretung an:http://www.eaton.com/moeller/aftersalesoderHotline After Sales Service:+49 (0) 180 5 223822 (de, en)[email protected]
OriginalbetriebsanleitungDie amerikanische Ausführung dieses Dokuments ist die Originalbetriebsanleitung.
Übersetzung der OriginalbetriebsanleitungAlle nichtenglischen Sprachausgaben dieses Dokuments sind Übersetzungen der Originalbetriebsanleitung.
1. Auflage 2011, Redaktionsdatum 03/2011
© 2011 by Eaton Industries GmbH, 53105 Bonn
Produktion: Andreas Miessen; René WiegandÜbersetzung: globaldocs
Alle Rechte, auch die der Übersetzung, vorbehalten.
Kein Teil dieses Handbuches darf in irgendeiner Form (Druck, Fotokopie, Mikrofilm oder einem anderen Verfahren) ohne schriftliche Zustimmung der Firma Eaton Indus-tries GmbH, Bonn, reproduziert oder unter Verwendung elektronischer Systeme verarbeitet, vervielfältigt oder verbreitet werden.
Änderungen vorbehalten.
Inhaltsverzeichnis
Inhaltsverzeichnis
0 Sicherheitshinweise................................................................... 30.1 Definitionen und Symbole............................................................ 30.2 Gefährliche Hochspannung .......................................................... 40.3 Warn- und Vorsichtshinweise ...................................................... 4
1 Allgemeines ................................................................................ 51.1 Allgemein ..................................................................................... 5
2 CANopen-Optionskarte OPTC6 – Technische Daten .............. 62.1 Allgemein ..................................................................................... 62.2 CANopen-Kabel ............................................................................ 6
3 CANopen-Beschreibung OPTC6................................................ 73.1 CANopen...................................................................................... 7
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6 ....... 84.1 CANopen-Optionskarte OPTC6.................................................... 84.2 Busabschlusswiderstände ........................................................... 84.3 LED-Zustandsanzeigen................................................................. 94.4 Anschluss des CANopen-Buskabels ............................................ 104.5 Erdung durch Anklemmen des Kabels an den Umrichterrahmen 104.6 Direkte Erdung des Buskabelschirms am Rahmen über einen
RC-Filter ....................................................................................... 104.7 Direkter Erdanschluss des Buskabelschirms am Rahmen des
Frequenzumrichters über Steckbrücke X1 ................................... 114.8 Direkte Erdung des Buskabelschirms am Rahmen des
Frequenzumrichters über einen RC-Filter .................................... 14
5 Einbau der CANopen-Optionskarte OPTC6 ............................. 165.1 Karteninformationsaufkleber ........................................................ 17
6 Inbetriebnahme.......................................................................... 186.1 Erweiterungskartenmenü (M6) .................................................... 186.2 CANopen-Parameter .................................................................... 186.3 CANopen-Status........................................................................... 20
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 1
Inhaltsverzeichnis
7 Umrichterschnittstelle 9000X CANopen OPTC6..................... 217.1 CANopen-Mitteilungsrahmen ...................................................... 217.2 COB-ID......................................................................................... 217.3 Vordefinierte Verbindungssätze ................................................... 227.4 Netzwerkmanagement (NMT) ..................................................... 237.5 Prozessdatenobjekte (PDO)......................................................... 247.6 Übertragungsarten....................................................................... 257.7 Regelung des Umrichters über PDO-Mitteilungen mit
Umrichterprofil ............................................................................. 267.8 Antriebszustand (State Machine) ................................................. 287.9 Herstellerspezifische PDOs mit Bypass-Betriebsarten verwenden297.10 Regelung des Umrichters 9000X................................................. 307.11 Umrichterüberwachung ............................................................... 317.12 Allparameterdienst (Anyparameter Service) ................................ 327.13 Sevicedatenobjekte (SDO) ........................................................... 347.14 Beschreibung des Objektverzeichnisses ..................................... 36
8 Busteilnehmerüberwachungsprotokoll ................................... 498.1 Elektronisches Datenblatt, EDS-Datei.......................................... 50
9 Anhänge...................................................................................... 519.1 Anhang A: Geräteprofile für Umrichter 9000X............................. 519.2 Anhang B: SDO-Mitteilungen....................................................... 529.3 Anhang C: Prozessdateninhalte ................................................... 549.3.1 Prozessdaten AUSGABE (Slave → Master)................................ 549.3.2 Prozessdaten EINGABE (Master → Slave) ................................. 549.4 Anhang D: .................................................................................... 55
2 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
0 Sicherheitshinweise
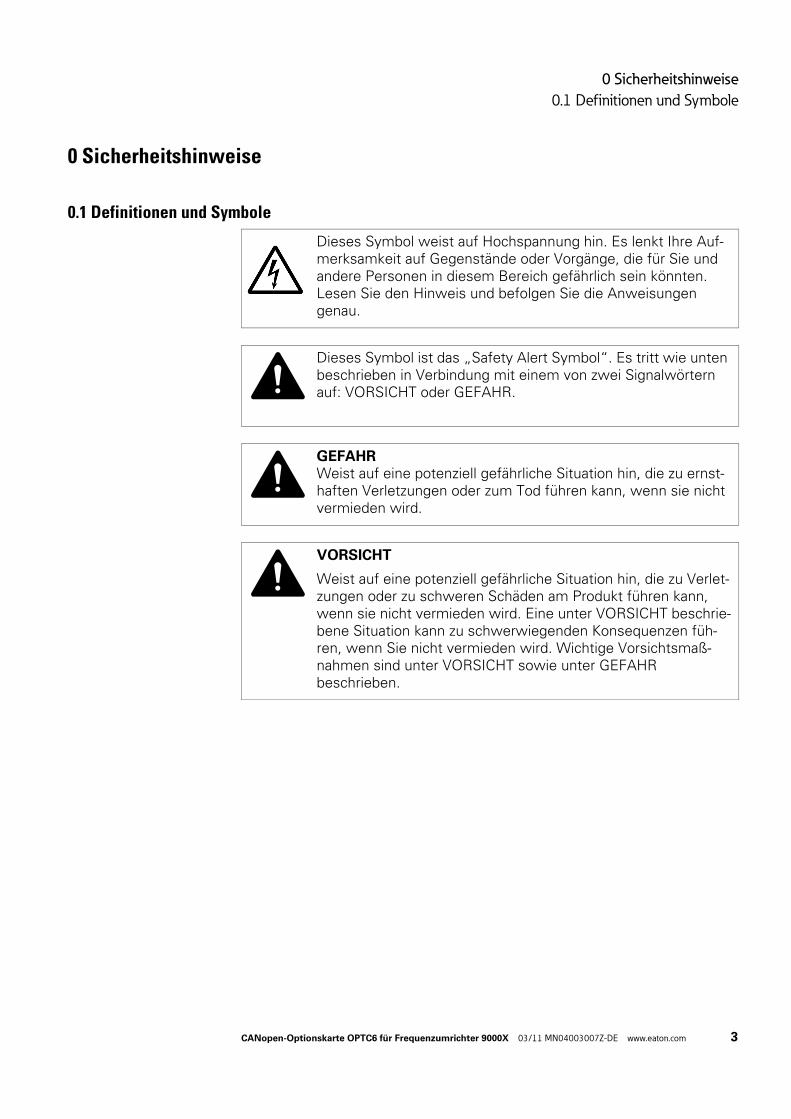
0.1 Definitionen und Symbole
0 Sicherheitshinweise
0.1 Definitionen und Symbole
Dieses Symbol weist auf Hochspannung hin. Es lenkt Ihre Auf-merksamkeit auf Gegenstände oder Vorgänge, die für Sie und andere Personen in diesem Bereich gefährlich sein könnten. Lesen Sie den Hinweis und befolgen Sie die Anweisungen genau.
Dieses Symbol ist das „Safety Alert Symbol“. Es tritt wie unten beschrieben in Verbindung mit einem von zwei Signalwörtern auf: VORSICHT oder GEFAHR.
GEFAHRWeist auf eine potenziell gefährliche Situation hin, die zu ernst-haften Verletzungen oder zum Tod führen kann, wenn sie nicht vermieden wird.
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu Verlet-zungen oder zu schweren Schäden am Produkt führen kann, wenn sie nicht vermieden wird. Eine unter VORSICHT beschrie-bene Situation kann zu schwerwiegenden Konsequenzen füh-ren, wenn Sie nicht vermieden wird. Wichtige Vorsichtsmaß-nahmen sind unter VORSICHT sowie unter GEFAHR beschrieben.
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 3
0 Sicherheitshinweise
0.2 Gefährliche Hochspannung
0.2 Gefährliche Hochspannung
0.3 Warn- und Vorsichtshinweise
Motorsteuerungen und elektronische Steuerungen sind an gefährliche Netzspannungen angeschlossen.
Bei der Wartung von Antrieben und elektronischen Steuerungen kann es freiliegende Komponenten mit Gehäusen oder Vor-sprüngen mit Leitungspotenzial oder einem höheren Potenzial geben. Äußerst vorsichtig vorgehen, um Stromschläge zu ver-meiden.
Auf einer isolierenden Unterlage stehen und verinnerlichen, bei der Überprüfung von Komponenten nur eine Hand zu benutzen.
Immer mit einer anderen Person arbeiten, um bei Notfällen Unterstützung zu haben. Die Stromversorgung vor der Überprü-fung oder Wartung von Steuerungen immer trennen.
Sicherstellen, dass Geräte ordnungsgemäß geerdet sind. Bei allen Arbeiten an elektronischen Steuerungen oder rotierenden Maschinen eine Schutzbrille tragen.
VORSICHT
Innenbauteile und Leiterplatten stehen unter hoher Spannung, wenn der Umrichter mit der Spannungsquelle verbunden ist. Diese Spannung ist überaus gefährlich und kann den Tod bzw. schwere Verletzungen verursachen, wenn man mit spannungs-führenden Teilen in Berührung kommt.
ACHTUNG
Stellen Sie sicher, dass der Frequenzumrichter ausgeschaltet ist, bevor eine Options- oder Feldbuskarte geändert oder hinzu-gefügt wird!
4 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
1 Allgemeines
1.1 Allgemein
1 Allgemeines
1.1 AllgemeinDie Umrichter 9000X von Eaton können mit dem CANopen-System über eine Feldbuskarte verbunden werden. Der Umrichter kann dann vom Zentralrech-ner gesteuert, überwacht und programmiert werden.
Die CANopen-Feldbuskarte muss in Einschub E auf der Steuerkarte des Fre-quenzumrichters untergebracht. werden. Siehe weitere Anweisungen auf Seite 16.
GEFAHR
Innenbauteile und Leiterplatten stehen unter hoher Spannung, wenn der Frequenzumrichter mit der Spannungsquelle verbun-den ist. Diese Spannung ist überaus gefährlich und kann den Tod bzw. schwere Verletzungen verursachen, wenn man mit spannungsführenden Teilen in Berührung kommt.
→ Sollten bei Ihnen Probleme im Umgang mit Feldbusfunktionen auftreten, setzen Sie sich bitte mit www.eaton.com in Verbin-dung
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 5
2 CANopen-Optionskarte OPTC6 – Technische Daten
2.1 Allgemein
2 CANopen-Optionskarte OPTC6 – Technische Daten
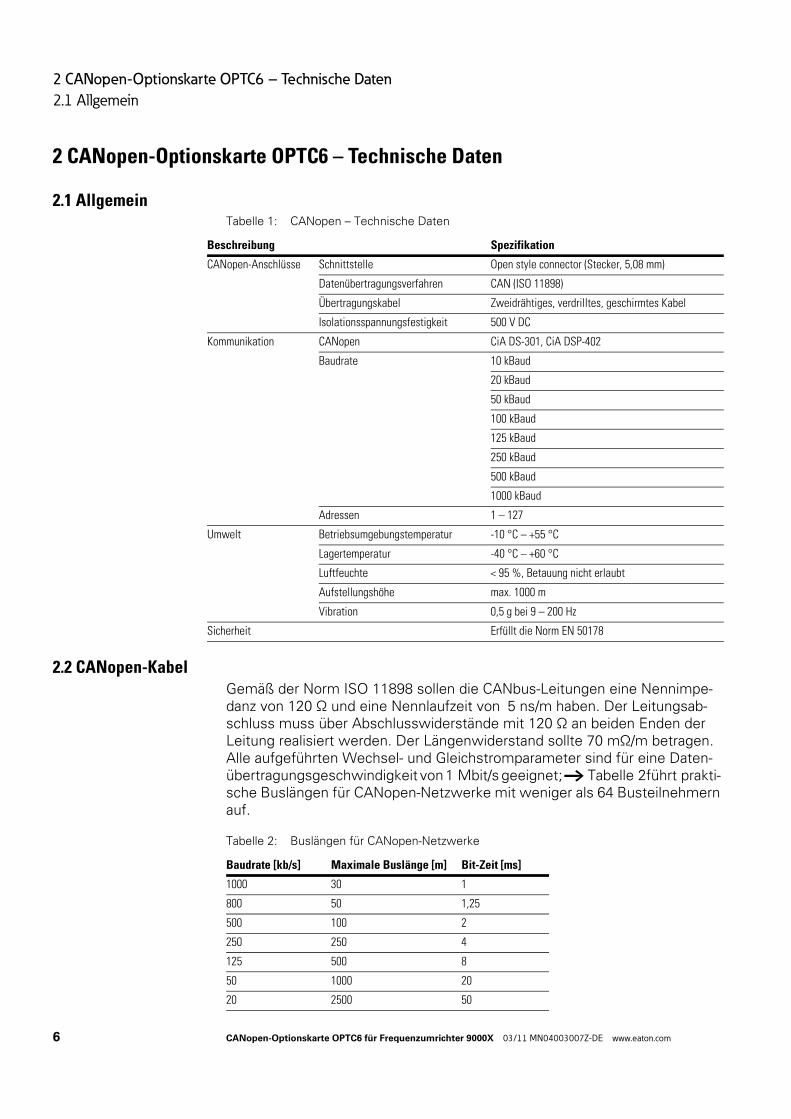
2.1 AllgemeinTabelle 1: CANopen – Technische Daten
2.2 CANopen-KabelGemäß der Norm ISO 11898 sollen die CANbus-Leitungen eine Nennimpe-danz von 120 Ω und eine Nennlaufzeit von 5 ns/m haben. Der Leitungsab-schluss muss über Abschlusswiderstände mit 120 Ω an beiden Enden der Leitung realisiert werden. Der Längenwiderstand sollte 70 mΩ/m betragen. Alle aufgeführten Wechsel- und Gleichstromparameter sind für eine Daten-übertragungsgeschwindigkeit von 1 Mbit/s geeignet; → Tabelle 2führt prakti-sche Buslängen für CANopen-Netzwerke mit weniger als 64 Busteilnehmern auf.
Tabelle 2: Buslängen für CANopen-Netzwerke
Beschreibung Spezifikation
CANopen-Anschlüsse Schnittstelle Open style connector (Stecker, 5,08 mm)
Datenübertragungsverfahren CAN (ISO 11898)
Übertragungskabel Zweidrähtiges, verdrilltes, geschirmtes Kabel
Isolationsspannungsfestigkeit 500 V DC
Kommunikation CANopen CiA DS-301, CiA DSP-402
Baudrate 10 kBaud
20 kBaud
50 kBaud
100 kBaud
125 kBaud
250 kBaud
500 kBaud
1000 kBaud
Adressen 1 – 127
Umwelt Betriebsumgebungstemperatur -10 °C – +55 °C
Lagertemperatur -40 °C – +60 °C
Luftfeuchte < 95 %, Betauung nicht erlaubt
Aufstellungshöhe max. 1000 m
Vibration 0,5 g bei 9 – 200 Hz
Sicherheit Erfüllt die Norm EN 50178
Baudrate [kb/s] Maximale Buslänge [m] Bit-Zeit [ms]
1000 30 1
800 50 1,25
500 100 2
250 250 4
125 500 8
50 1000 20
20 2500 50
6 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
3 CANopen-Beschreibung OPTC6
3.1 CANopen
3 CANopen-Beschreibung OPTC6
3.1 CANopenBei CANopen handelt es sich um ein Netzwerk auf Grundlage des seriellen Bussystems Controller Area Network (CAN). Das CANopen-Kommunikati-onsprofil (CiA DS-301) unterstützt sowohl den direkten Zugang zu Gerätepa-rametern als auch zeitkritische Prozessdatenkommunikation. Mit den CAN-open-Geräteprofilen (CiA DS-40x) werden Standards für die grundlegende Gerätefunktionalität festgelegt, während großzügig Raum für herstellerspezi-fische Gerätefunktionen bleibt. CANopen bietet die volle Leistungsfähigkeit von CAN, indem ein direkter Peer-to-peer-Datenaustausch zwischen den Busteilnehmern auf organisierte und falls notwendig deterministische Weise zugelassen wird. Die Netzwerkmanagementfunktionen in CANopen vereinfa-chen Projektentwurf, -umsetzung und -diagnose, indem sie Standardmecha-nismen zum Starten des Netzwerks und den Umgang mit Fehlern bieten.
CANopen unterstützt sowohl die zyklische als auch die ereignisgesteuerte Kommunikation. Dadurch wird es möglich, die Buslast auf ein Minimum zu reduzieren, unter Beibehaltung extrem kurzer Reaktionszeiten. Eine hohe Kommunikationsleistung kann bei relativ niedrigen Baudraten erreicht wer-den, wodurch EMC-Probleme verringert und Kabelkosten minimiert werden.
Bei CANopen handelt es sich um das ideale Netzwerk für alle Arten automa-tisierter Anlagen. Eine der herausragenden Eigenschaften von CANopen ist die Unterstützung des Datenaustauschs auf Überwachungsebene sowie die Ermöglichung der Integration sehr kleiner Sensoren und Befehlsgeräte in ein und demselben Netzwerk. Dadurch werden unnötige Ausgaben für Netz-koppler, die Sensor-/Befehlsgerätbussysteme mit übergeordneten Kommuni-kationsnetzwerken verbinden, eingespart, und CANopen wird dadurch für die Hersteller von Originalgeräten besonders attraktiv.
Im Dokument „Device Profile Drives and Motion Control“ (CiA DSP-402) werden standardisierte CANopen-Geräteprofile für digital gesteuerte Bewe-gungsprodukte wie Servoregler, Frequenzumrichter oder Schrittmotoren vor-gestellt. Alle oben aufgeführten Geräte verwenden Kommunikationstech-niken, die denen in den Abschnitten „CANopen Application Layer and Communication“ entsprechen. Starten und Anhalten des Umrichters und einige Befehle, die von der Betriebsart abhängen, werden vom Antriebszu-stand (state machine) durchgeführt. Die Betriebsart bestimmt das Verhalten des Umrichters.In diesem Profil sind die folgenden Betriebsarten festgelegt:
• Zielsuche• Profilposition• Interpolierte Position• Profilgeschwindigkeit• Profildrehmoment• Geschwindigkeit
Die CANopen-Optionskarte OPTC6 unterstützt die Betriebsart „Geschwin-digkeit“.
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 7
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.1 CANopen-Optionskarte OPTC6
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
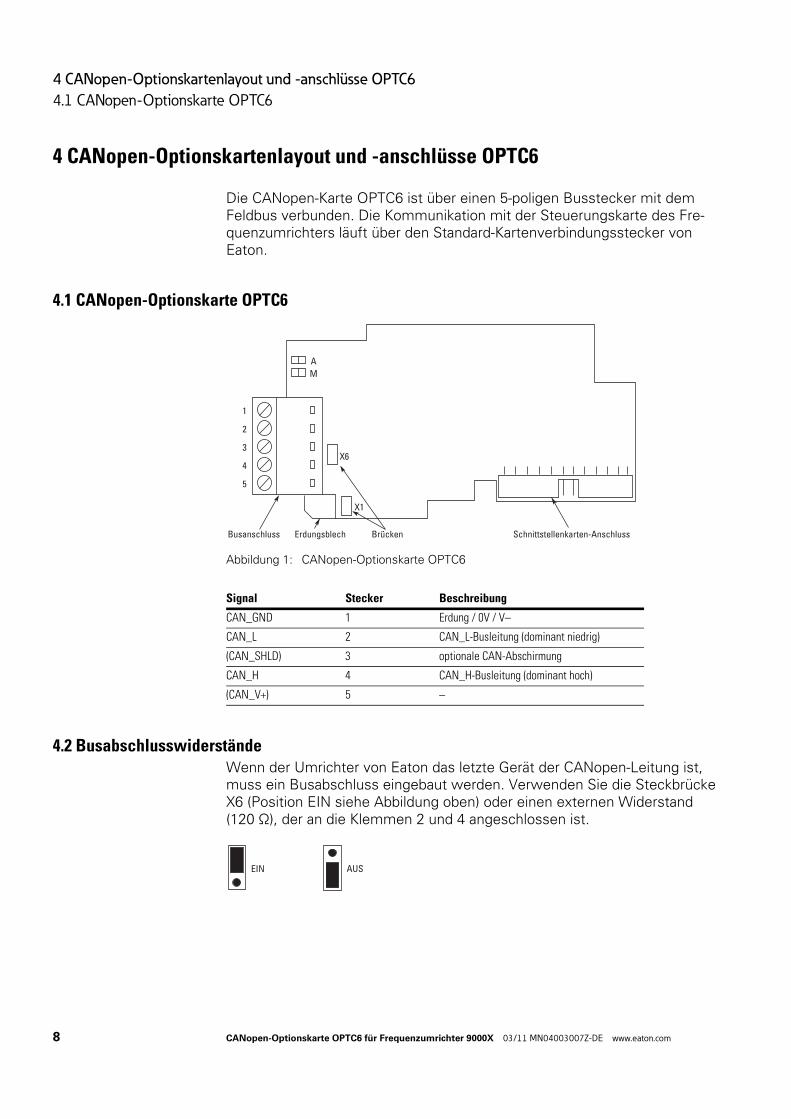
Die CANopen-Karte OPTC6 ist über einen 5-poligen Busstecker mit dem Feldbus verbunden. Die Kommunikation mit der Steuerungskarte des Fre-quenzumrichters läuft über den Standard-Kartenverbindungsstecker von Eaton.
4.1 CANopen-Optionskarte OPTC6
Abbildung 1: CANopen-Optionskarte OPTC6
4.2 BusabschlusswiderständeWenn der Umrichter von Eaton das letzte Gerät der CANopen-Leitung ist, muss ein Busabschluss eingebaut werden. Verwenden Sie die Steckbrücke X6 (Position EIN siehe Abbildung oben) oder einen externen Widerstand (120 Ω), der an die Klemmen 2 und 4 angeschlossen ist.
Signal Stecker Beschreibung
CAN_GND 1 Erdung / 0V / V–
CAN_L 2 CAN_L-Busleitung (dominant niedrig)
(CAN_SHLD) 3 optionale CAN-Abschirmung
CAN_H 4 CAN_H-Busleitung (dominant hoch)
(CAN_V+) 5 –
AM
1
Busanschluss Erdungsblech Brücken Schnittstellenkarten-Anschluss
2
X1
X63
4
5
AUSEIN
8 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.3 LED-Zustandsanzeigen
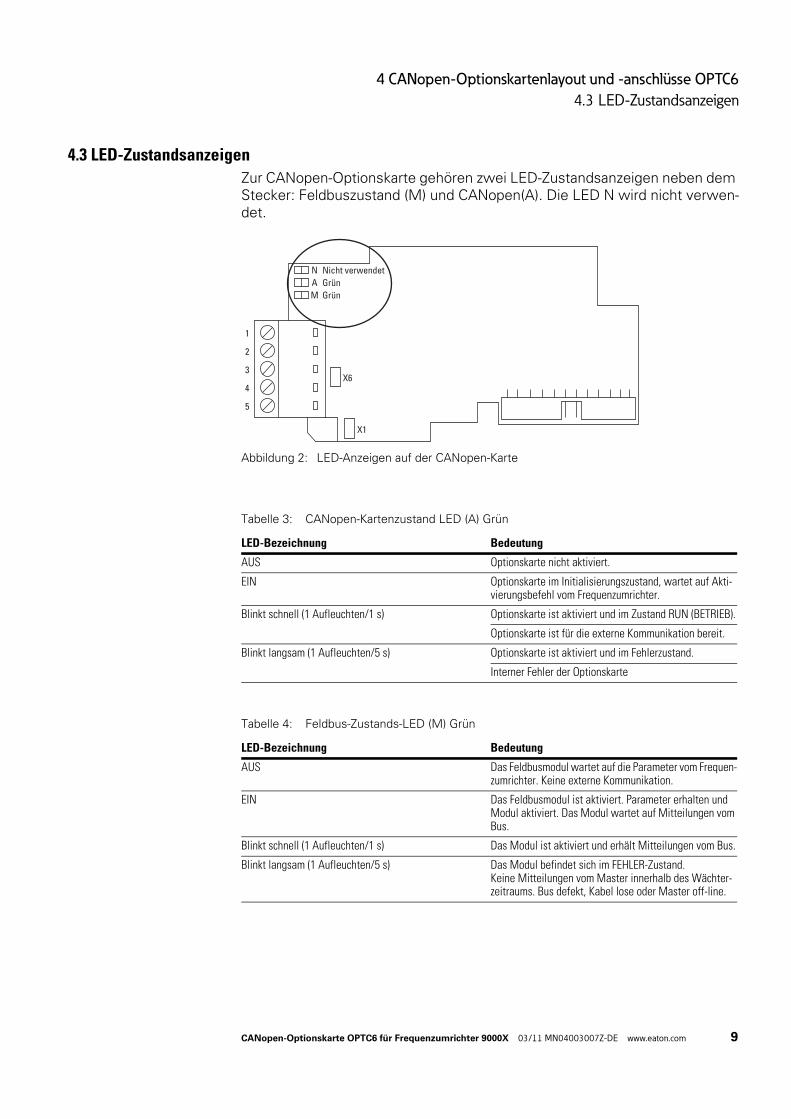
4.3 LED-ZustandsanzeigenZur CANopen-Optionskarte gehören zwei LED-Zustandsanzeigen neben dem Stecker: Feldbuszustand (M) und CANopen(A). Die LED N wird nicht verwen-det.
Abbildung 2: LED-Anzeigen auf der CANopen-Karte
Tabelle 3: CANopen-Kartenzustand LED (A) Grün
Tabelle 4: Feldbus-Zustands-LED (M) Grün
LED-Bezeichnung Bedeutung
AUS Optionskarte nicht aktiviert.
EIN Optionskarte im Initialisierungszustand, wartet auf Akti-vierungsbefehl vom Frequenzumrichter.
Blinkt schnell (1 Aufleuchten/1 s) Optionskarte ist aktiviert und im Zustand RUN (BETRIEB).
Optionskarte ist für die externe Kommunikation bereit.
Blinkt langsam (1 Aufleuchten/5 s) Optionskarte ist aktiviert und im Fehlerzustand.
Interner Fehler der Optionskarte
LED-Bezeichnung Bedeutung
AUS Das Feldbusmodul wartet auf die Parameter vom Frequen-zumrichter. Keine externe Kommunikation.
EIN Das Feldbusmodul ist aktiviert. Parameter erhalten und Modul aktiviert. Das Modul wartet auf Mitteilungen vom Bus.
Blinkt schnell (1 Aufleuchten/1 s) Das Modul ist aktiviert und erhält Mitteilungen vom Bus.
Blinkt langsam (1 Aufleuchten/5 s) Das Modul befindet sich im FEHLER-Zustand.Keine Mitteilungen vom Master innerhalb des Wächter-zeitraums. Bus defekt, Kabel lose oder Master off-line.
NAM
1
2
X1
X63
4
5
Nicht verwendet
GrünGrün
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 9
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.4 Anschluss des CANopen-Buskabels
4.4 Anschluss des CANopen-BuskabelsDer Buskabelschirm kann auf drei Weisen geerdet werden:
• Kabel an den Rahmen des Umrichters klemmen.• Am Rahmen des Umrichters über einen RC-Filter.• Direkt am Rahmen des Umrichters.
4.5 Erdung durch Anklemmen des Kabels an den UmrichterrahmenDiese Art der Erdung ist besonders wirksam und wird insbesondere dann empfohlen, wenn die Entfernungen zwischen den Geräten relativ kurz sind (siehe Seite 11, Erdung des Buskabelschirms). Bei dieser Art der Erdung spielt die Steckbrücke X1 keine Rolle.
4.6 Direkte Erdung des Buskabelschirms am Rahmen über einen RC-FilterDiese Erdungsart wird empfohlen, wenn die Entfernung zwischen den Gerä-ten 50 m (55 yd) überschreitet. Wenn die Entfernung zwischen den Geräten groß ist, ist es wahrscheinlicher, dass Störungen (z. B. Überspannungsspit-zen) auftreten. Bei diesem Erdungsverfahren werden die Störungen ausgefil-tert. Selbst wenn die Erdungsebenen von A, B, und C unterschiedlich sind (was sehr typisch für den Bau ist), fließt kein Strom zwischen ihnen, weil die Punkte keine Erdverbindung haben.
▶ Ziehen Sie etwa 5 cm vom CANopen-Kabel, wie unten dargestellt, ab; schneiden Sie den grauen Kabelschirm ab. Denken Sie daran, dies für beide Buskabel zu tun (außer für das letzte Gerät).
▶ Lassen Sie nicht mehr als 1 cm des rot-grünen Datenkabels außerhalb der Klemmenleiste und isolieren Sie das Datenkabel ungefähr 0,5 cm ab, damit es in die Klemmen passt. Siehe Seite 12.
▶ Stecken Sie die Datenleitungen beider CANopen-Kabel in die Klemmen #2 und #4. Siehe Foto der „Klemmenleiste“ auf Seite 12.
→ Üblicherweise ist die Optionskarte bereits in Steckplatz E der Steuerkarte eingebaut. Es ist nicht notwendig, die gesamte Karte zur Erdung des Buskabelschirms zu lösen. Lösen Sie lediglich die Klemmenleiste.
CANopen-Kabel CANopen-Kabel CANopen-KabelA B C
→ Machen Sie dies bei beiden Buskabeln.
10 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.7 Direkter Erdanschluss des Buskabelschirms am Rahmen des Frequenzumrichters über Steckbrücke X1
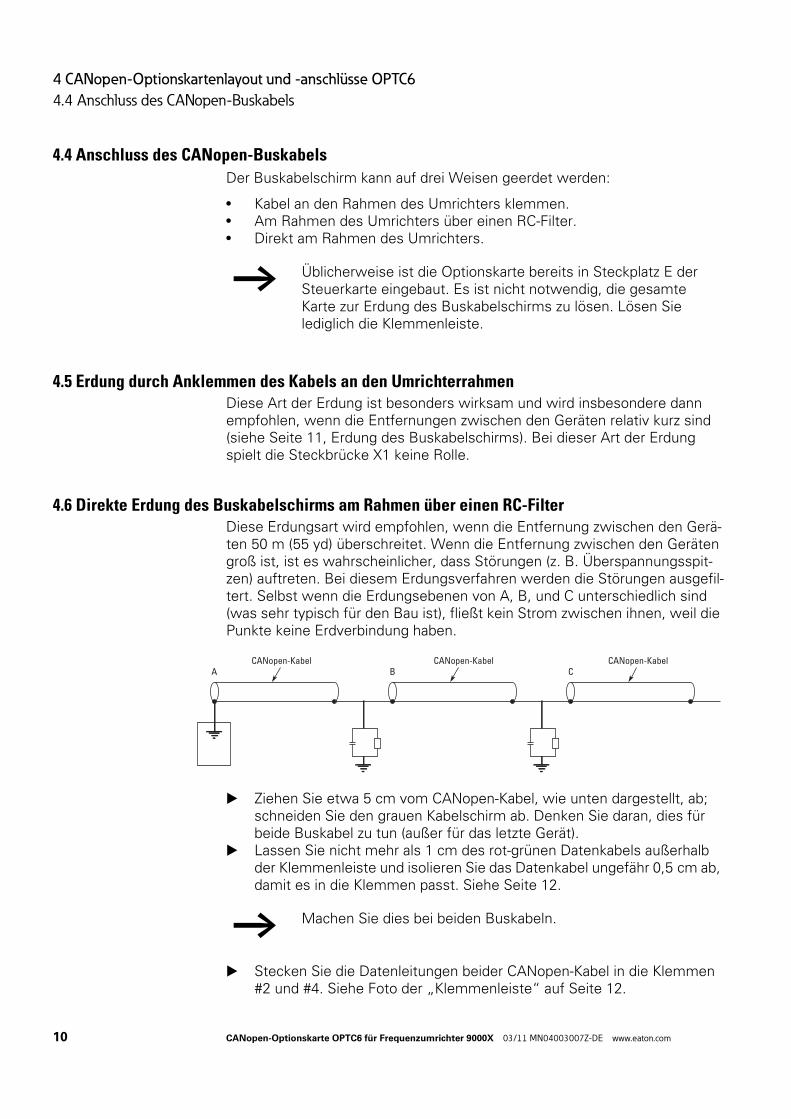
▶ Ziehen Sie die Isolierung des CANopen-Kabels in der Entfernung von der Klemmenleiste ab, so dass Sie es ohne Erdungsklemme am Rahmen befestigen können. Siehe unten.
Abbildung 3: CANopen-Kabel
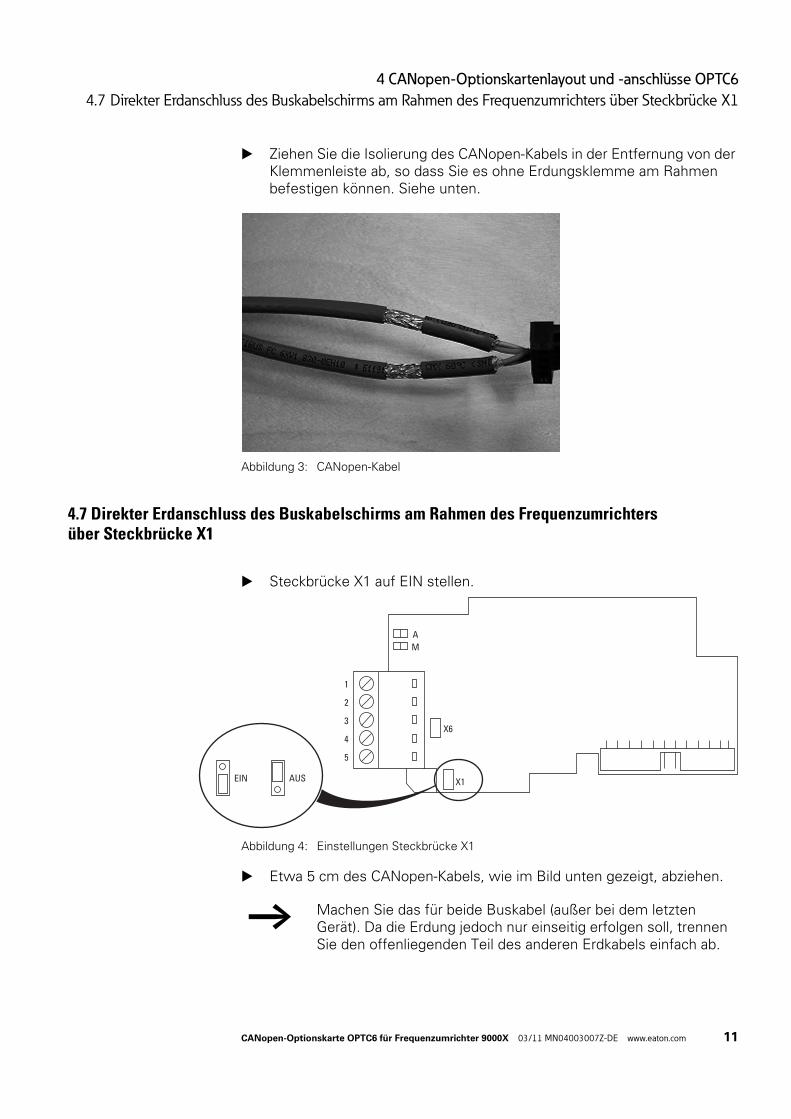
4.7 Direkter Erdanschluss des Buskabelschirms am Rahmen des Frequenzumrichtersüber Steckbrücke X1
▶ Steckbrücke X1 auf EIN stellen.
Abbildung 4: Einstellungen Steckbrücke X1
▶ Etwa 5 cm des CANopen-Kabels, wie im Bild unten gezeigt, abziehen.
AUSEIN
AM
1
2
X1
X63
4
5
→ Machen Sie das für beide Buskabel (außer bei dem letzten Gerät). Da die Erdung jedoch nur einseitig erfolgen soll, trennen Sie den offenliegenden Teil des anderen Erdkabels einfach ab.
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 11
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.7 Direkter Erdanschluss des Buskabelschirms am Rahmen des Frequenzumrichters über Steckbrücke X1
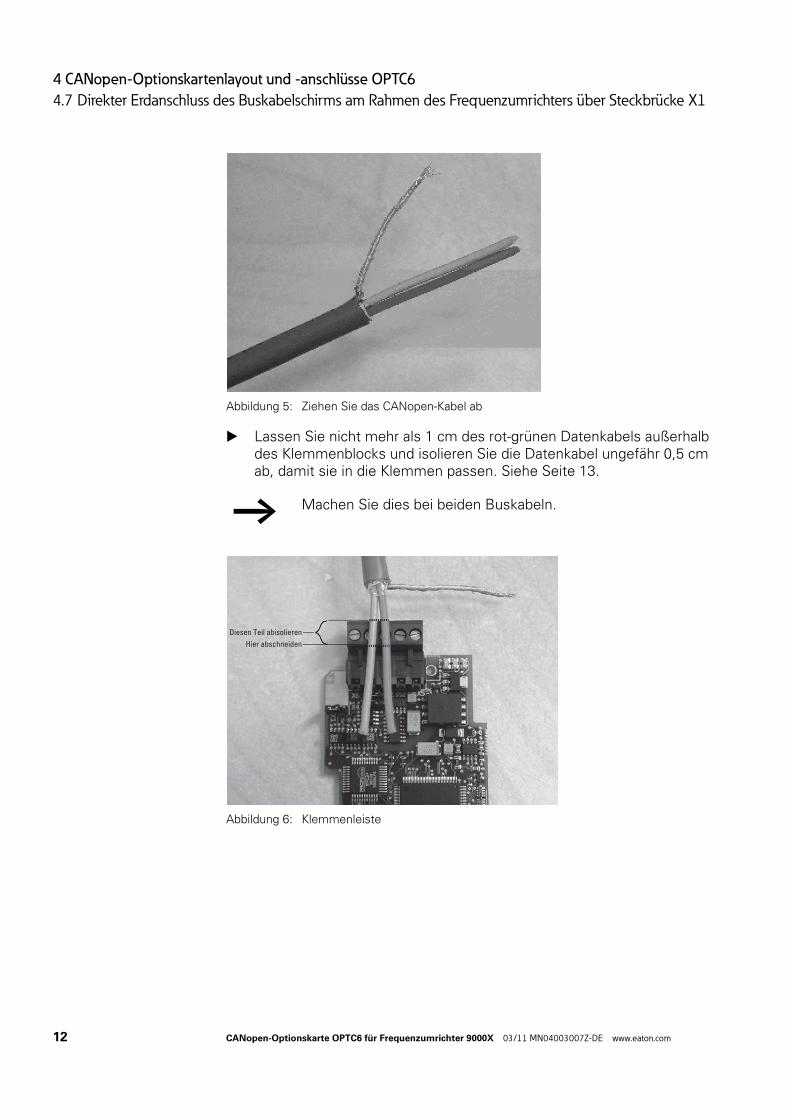
Abbildung 5: Ziehen Sie das CANopen-Kabel ab
▶ Lassen Sie nicht mehr als 1 cm des rot-grünen Datenkabels außerhalb des Klemmenblocks und isolieren Sie die Datenkabel ungefähr 0,5 cm ab, damit sie in die Klemmen passen. Siehe Seite 13.
Abbildung 6: Klemmenleiste
→ Machen Sie dies bei beiden Buskabeln.
Diesen Teil abisolieren
Hier abschneiden
12 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.7 Direkter Erdanschluss des Buskabelschirms am Rahmen des Frequenzumrichters über Steckbrücke X1
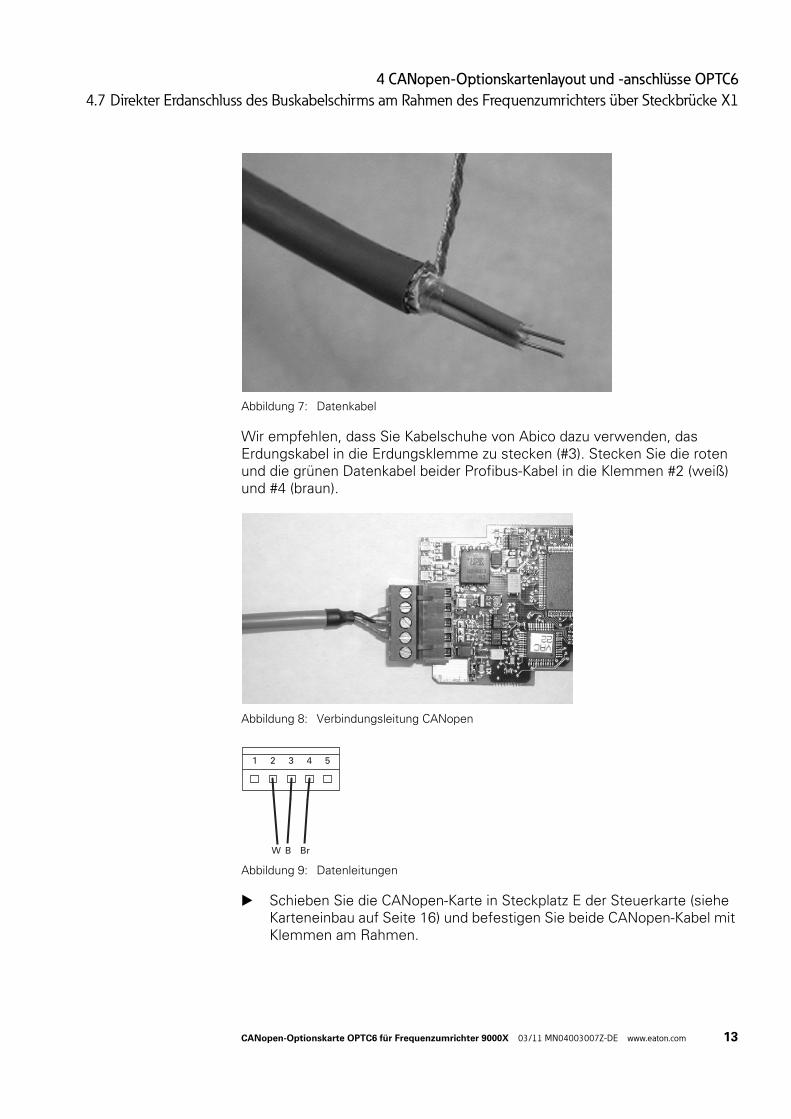
Abbildung 7: Datenkabel
Wir empfehlen, dass Sie Kabelschuhe von Abico dazu verwenden, das Erdungskabel in die Erdungsklemme zu stecken (#3). Stecken Sie die roten und die grünen Datenkabel beider Profibus-Kabel in die Klemmen #2 (weiß) und #4 (braun).
Abbildung 8: Verbindungsleitung CANopen
Abbildung 9: Datenleitungen
▶ Schieben Sie die CANopen-Karte in Steckplatz E der Steuerkarte (siehe Karteneinbau auf Seite 16) und befestigen Sie beide CANopen-Kabel mit Klemmen am Rahmen.
1 2 3 4 5
BW Br
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 13
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.8 Direkte Erdung des Buskabelschirms am Rahmen des Frequenzumrichters über einen RC-Filter
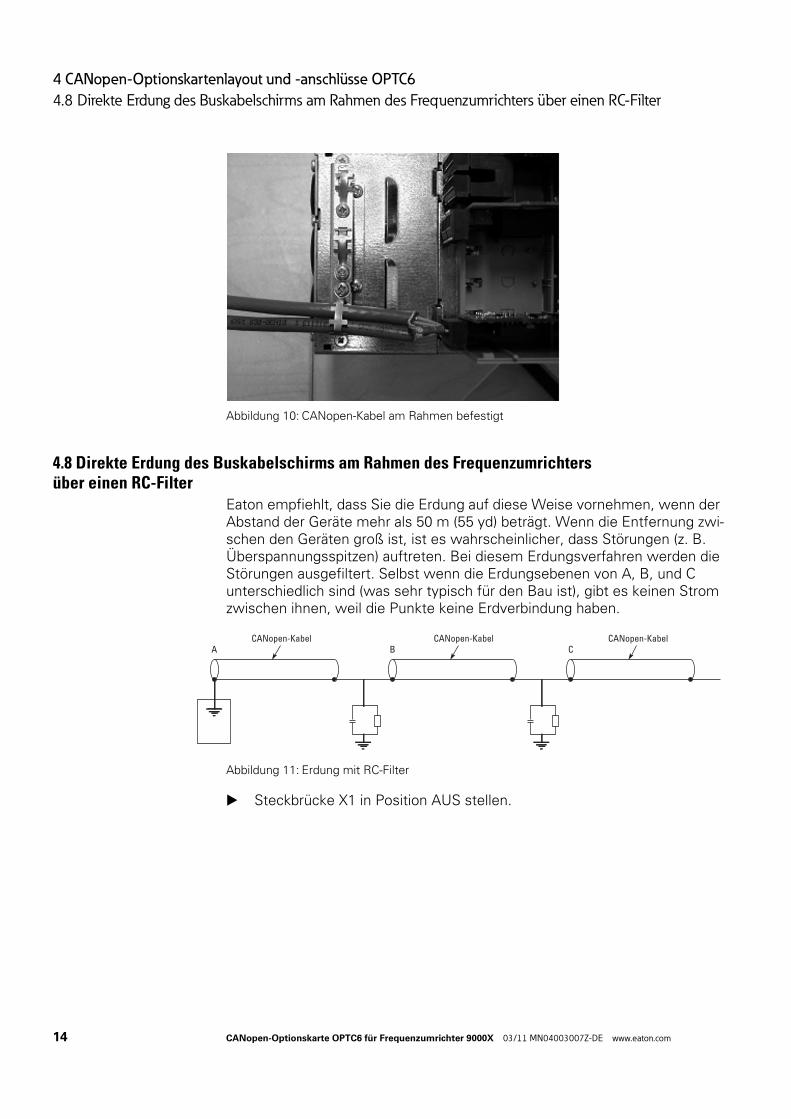
Abbildung 10: CANopen-Kabel am Rahmen befestigt
4.8 Direkte Erdung des Buskabelschirms am Rahmen des Frequenzumrichtersüber einen RC-Filter
Eaton empfiehlt, dass Sie die Erdung auf diese Weise vornehmen, wenn der Abstand der Geräte mehr als 50 m (55 yd) beträgt. Wenn die Entfernung zwi-schen den Geräten groß ist, ist es wahrscheinlicher, dass Störungen (z. B. Überspannungsspitzen) auftreten. Bei diesem Erdungsverfahren werden die Störungen ausgefiltert. Selbst wenn die Erdungsebenen von A, B, und C unterschiedlich sind (was sehr typisch für den Bau ist), gibt es keinen Strom zwischen ihnen, weil die Punkte keine Erdverbindung haben.
Abbildung 11: Erdung mit RC-Filter
▶ Steckbrücke X1 in Position AUS stellen.
CANopen-Kabel CANopen-Kabel CANopen-KabelA B C
14 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
4 CANopen-Optionskartenlayout und -anschlüsse OPTC6
4.8 Direkte Erdung des Buskabelschirms am Rahmen des Frequenzumrichters über einen RC-Filter
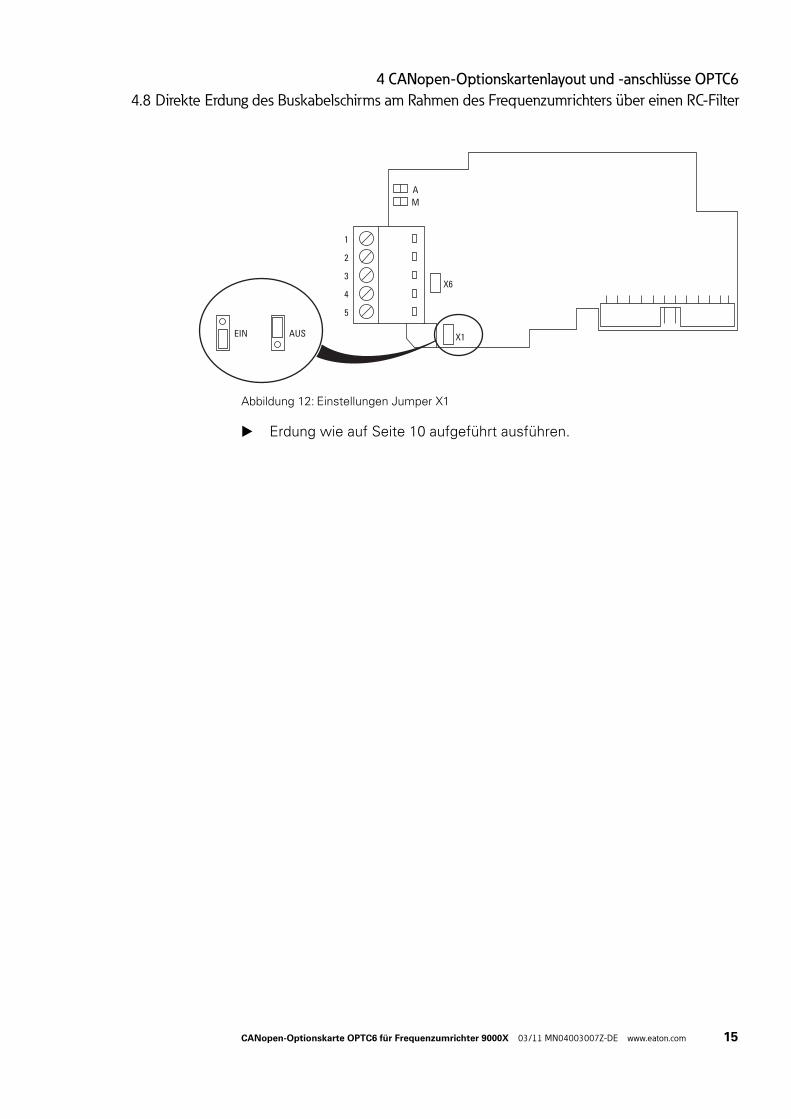
Abbildung 12: Einstellungen Jumper X1
▶ Erdung wie auf Seite 10 aufgeführt ausführen.
AUSEIN
AM
1
2
X1
X63
4
5
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 15
5 Einbau der CANopen-Optionskarte OPTC6
4.8 Direkte Erdung des Buskabelschirms am Rahmen des Frequenzumrichters über einen RC-Filter
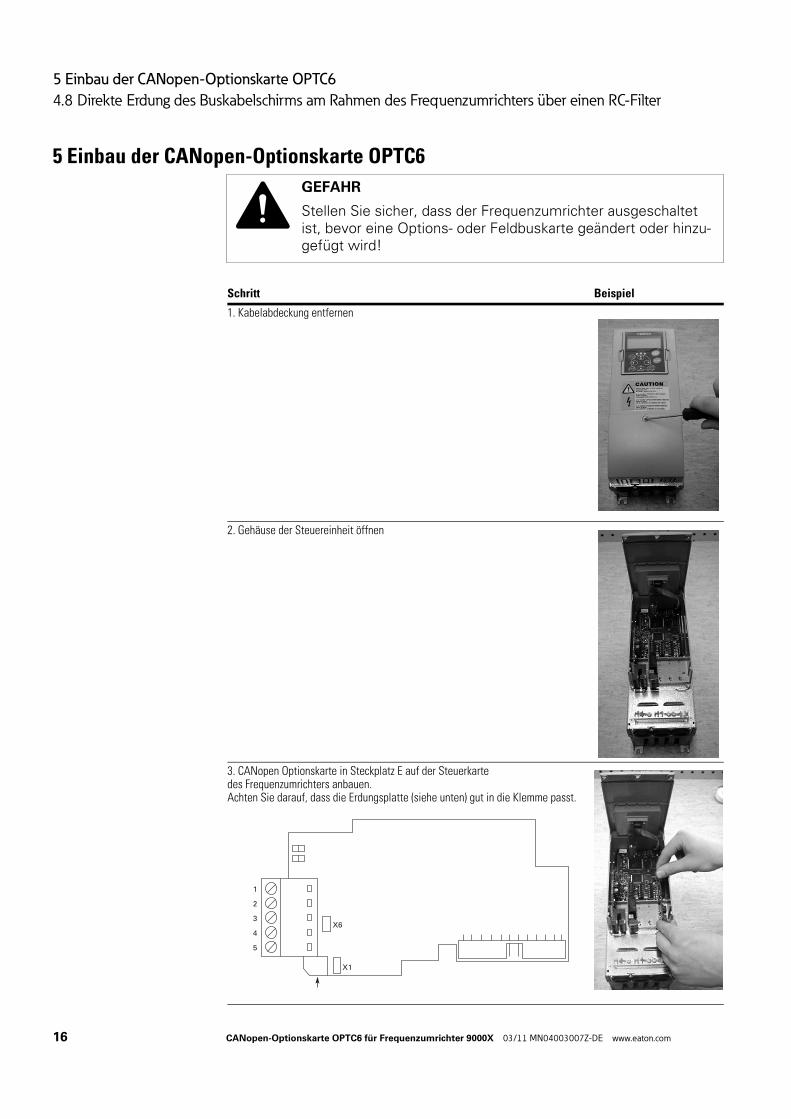
5 Einbau der CANopen-Optionskarte OPTC6
GEFAHR
Stellen Sie sicher, dass der Frequenzumrichter ausgeschaltet ist, bevor eine Options- oder Feldbuskarte geändert oder hinzu-gefügt wird!
Schritt Beispiel
1. Kabelabdeckung entfernen
2. Gehäuse der Steuereinheit öffnen
3. CANopen Optionskarte in Steckplatz E auf der Steuerkartedes Frequenzumrichters anbauen.Achten Sie darauf, dass die Erdungsplatte (siehe unten) gut in die Klemme passt.
1
2
X1
X63
4
5
16 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
5 Einbau der CANopen-Optionskarte OPTC6
5.1 Karteninformationsaufkleber
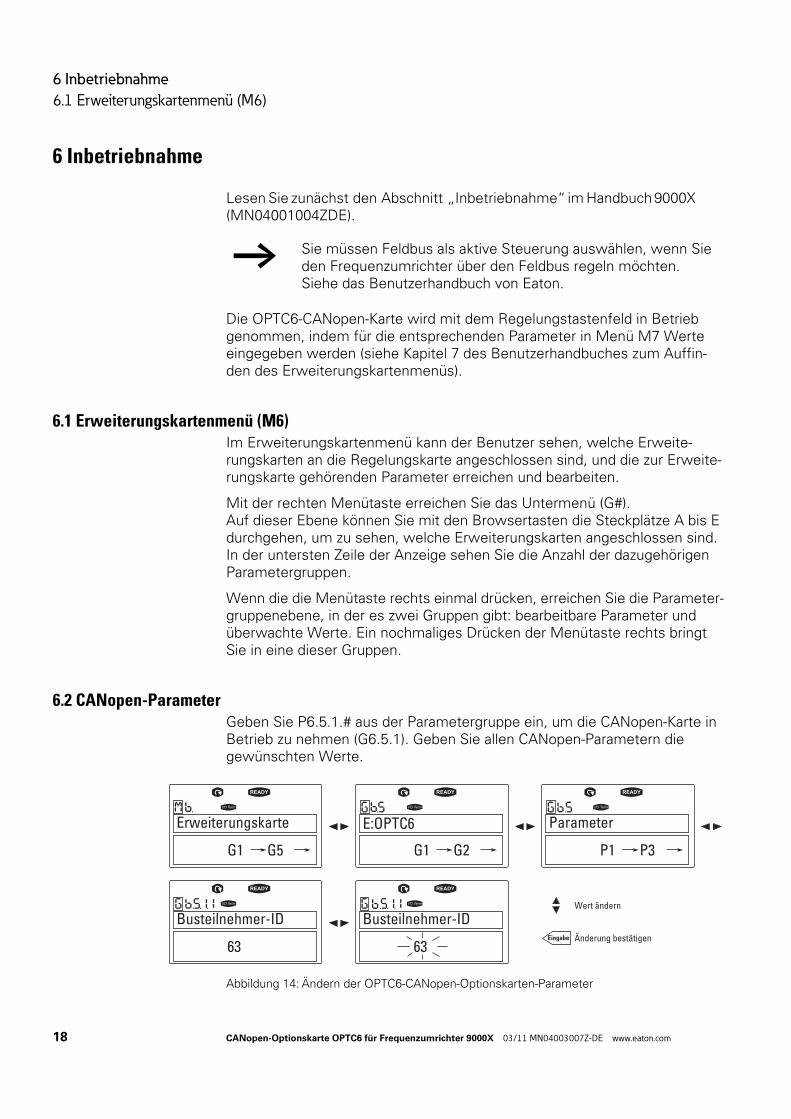
5.1 KarteninformationsaufkleberZum Packungsinhalt der CANopen-Optionskarte OPTC6, die ab Werk ausge-liefert wurde, gehört ein Aufkleber (siehe unten). Markieren Sie bitte die Kar-tenart (1), den Steckplatz, in den Karte montiert ist (2), und das Einbaudatum (3) auf dem Aufkleber. Befestigen Sie den Aufkleber auf Ihrem Umrichter.
Abbildung 13: Informationsaufkleber
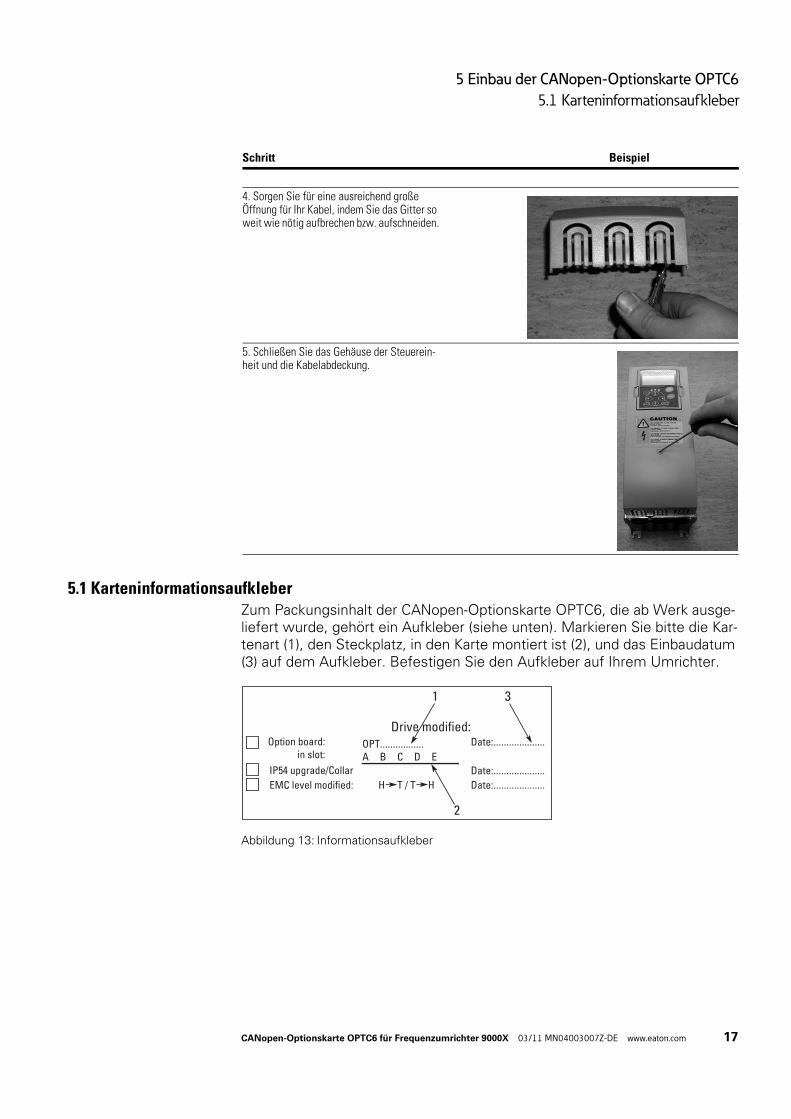
4. Sorgen Sie für eine ausreichend große Öffnung für Ihr Kabel, indem Sie das Gitter so weit wie nötig aufbrechen bzw. aufschneiden.
5. Schließen Sie das Gehäuse der Steuerein-heit und die Kabelabdeckung.
Schritt Beispiel
H Y T / T Y H
Option board:in slot:
IP54 upgrade/Collar
EMC level modified: Date:....................Date:....................
Date:....................
1
Drive modified:OPT.................A B C D E
3
2
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 17
6 Inbetriebnahme
6.1 Erweiterungskartenmenü (M6)
6 Inbetriebnahme
Lesen Sie zunächst den Abschnitt „Inbetriebnahme“ im Handbuch 9000X (MN04001004ZDE).
Die OPTC6-CANopen-Karte wird mit dem Regelungstastenfeld in Betrieb genommen, indem für die entsprechenden Parameter in Menü M7 Werte eingegeben werden (siehe Kapitel 7 des Benutzerhandbuches zum Auffin-den des Erweiterungskartenmenüs).
6.1 Erweiterungskartenmenü (M6)Im Erweiterungskartenmenü kann der Benutzer sehen, welche Erweite-rungskarten an die Regelungskarte angeschlossen sind, und die zur Erweite-rungskarte gehörenden Parameter erreichen und bearbeiten.
Mit der rechten Menütaste erreichen Sie das Untermenü (G#).Auf dieser Ebene können Sie mit den Browsertasten die Steckplätze A bis E durchgehen, um zu sehen, welche Erweiterungskarten angeschlossen sind. In der untersten Zeile der Anzeige sehen Sie die Anzahl der dazugehörigen Parametergruppen.
Wenn die die Menütaste rechts einmal drücken, erreichen Sie die Parameter-gruppenebene, in der es zwei Gruppen gibt: bearbeitbare Parameter und überwachte Werte. Ein nochmaliges Drücken der Menütaste rechts bringt Sie in eine dieser Gruppen.
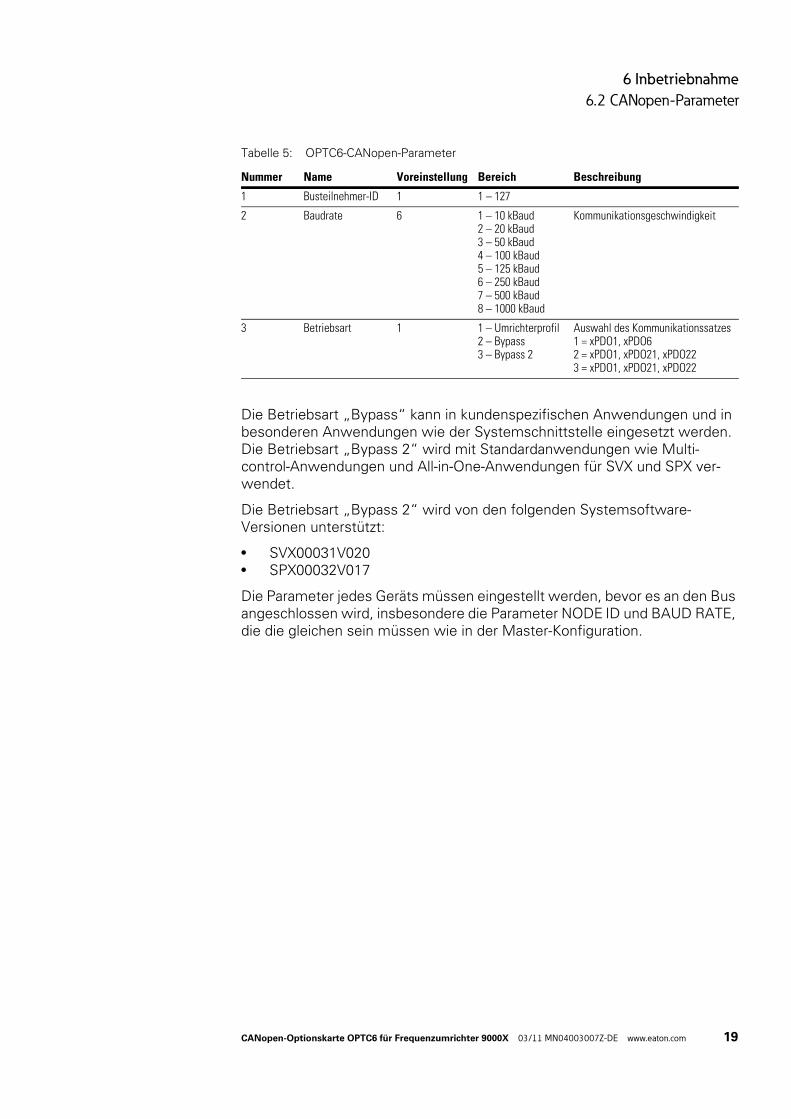
6.2 CANopen-ParameterGeben Sie P6.5.1.# aus der Parametergruppe ein, um die CANopen-Karte in Betrieb zu nehmen (G6.5.1). Geben Sie allen CANopen-Parametern die gewünschten Werte.
Abbildung 14: Ändern der OPTC6-CANopen-Optionskarten-Parameter
→ Sie müssen Feldbus als aktive Steuerung auswählen, wenn Sie den Frequenzumrichter über den Feldbus regeln möchten. Siehe das Benutzerhandbuch von Eaton.
E:OPTC6 Erweiterungskarte
G1 G5 G1 G2
Busteilnehmer-ID Busteilnehmer-ID
63
Parameter
P1 P3
63
Wert ändern
Änderung bestätigenEingabe
18 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
6 Inbetriebnahme
6.2 CANopen-Parameter
Tabelle 5: OPTC6-CANopen-Parameter
Die Betriebsart „Bypass“ kann in kundenspezifischen Anwendungen und in besonderen Anwendungen wie der Systemschnittstelle eingesetzt werden. Die Betriebsart „Bypass 2“ wird mit Standardanwendungen wie Multi-control-Anwendungen und All-in-One-Anwendungen für SVX und SPX ver-wendet.
Die Betriebsart „Bypass 2“ wird von den folgenden Systemsoftware-Versionen unterstützt:
• SVX00031V020• SPX00032V017
Die Parameter jedes Geräts müssen eingestellt werden, bevor es an den Bus angeschlossen wird, insbesondere die Parameter NODE ID und BAUD RATE, die die gleichen sein müssen wie in der Master-Konfiguration.
Nummer Name Voreinstellung Bereich Beschreibung
1 Busteilnehmer-ID 1 1 – 127
2 Baudrate 6 1 – 10 kBaud 2 – 20 kBaud 3 – 50 kBaud 4 – 100 kBaud 5 – 125 kBaud 6 – 250 kBaud7 – 500 kBaud8 – 1000 kBaud
Kommunikationsgeschwindigkeit
3 Betriebsart 1 1 – Umrichterprofil2 – Bypass3 – Bypass 2
Auswahl des Kommunikationssatzes1 = xPDO1, xPDO62 = xPDO1, xPDO21, xPDO223 = xPDO1, xPDO21, xPDO22
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 19
6 Inbetriebnahme
6.3 CANopen-Status
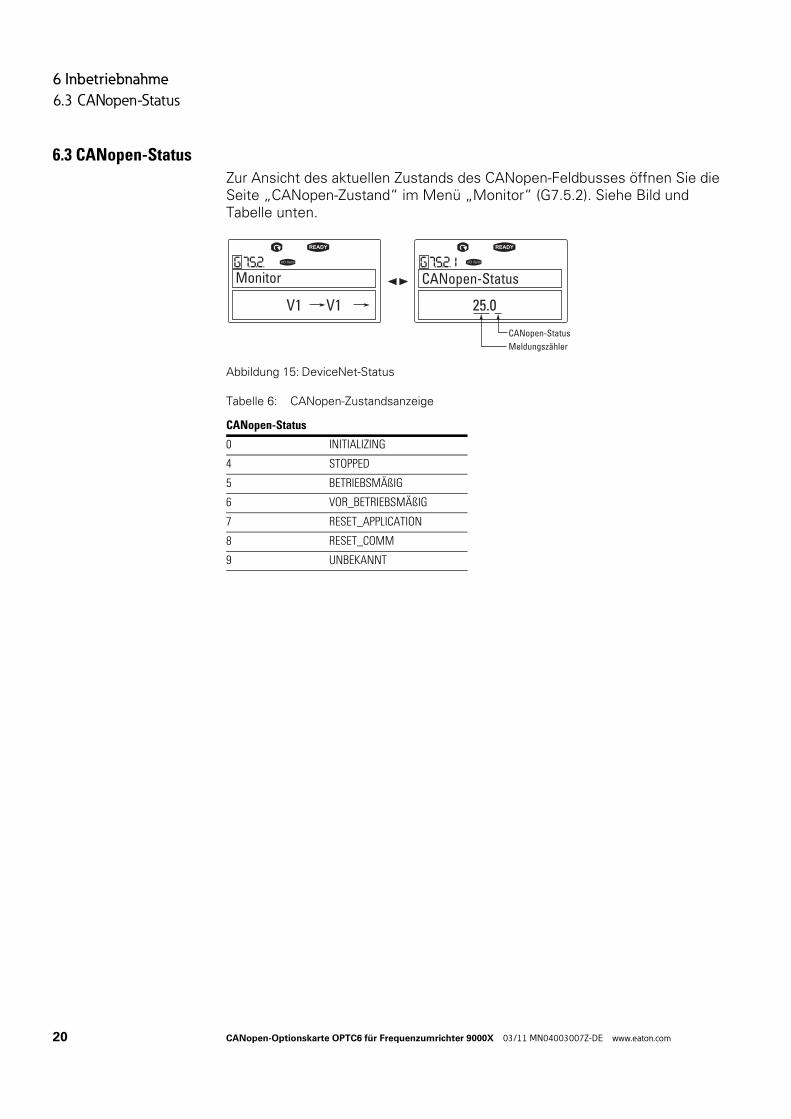
6.3 CANopen-StatusZur Ansicht des aktuellen Zustands des CANopen-Feldbusses öffnen Sie die Seite „CANopen-Zustand“ im Menü „Monitor“ (G7.5.2). Siehe Bild und Tabelle unten.
Abbildung 15: DeviceNet-Status
Tabelle 6: CANopen-Zustandsanzeige
CANopen-Status
0 INITIALIZING
4 STOPPED
5 BETRIEBSMÄßIG
6 VOR_BETRIEBSMÄßIG
7 RESET_APPLICATION
8 RESET_COMM
9 UNBEKANNT
CANopen-StatusMonitor
V1 V1 25.0
CANopen-Status
Meldungszähler
20 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.1 CANopen-Mitteilungsrahmen
7 Umrichterschnittstelle 9000X CANopen OPTC6
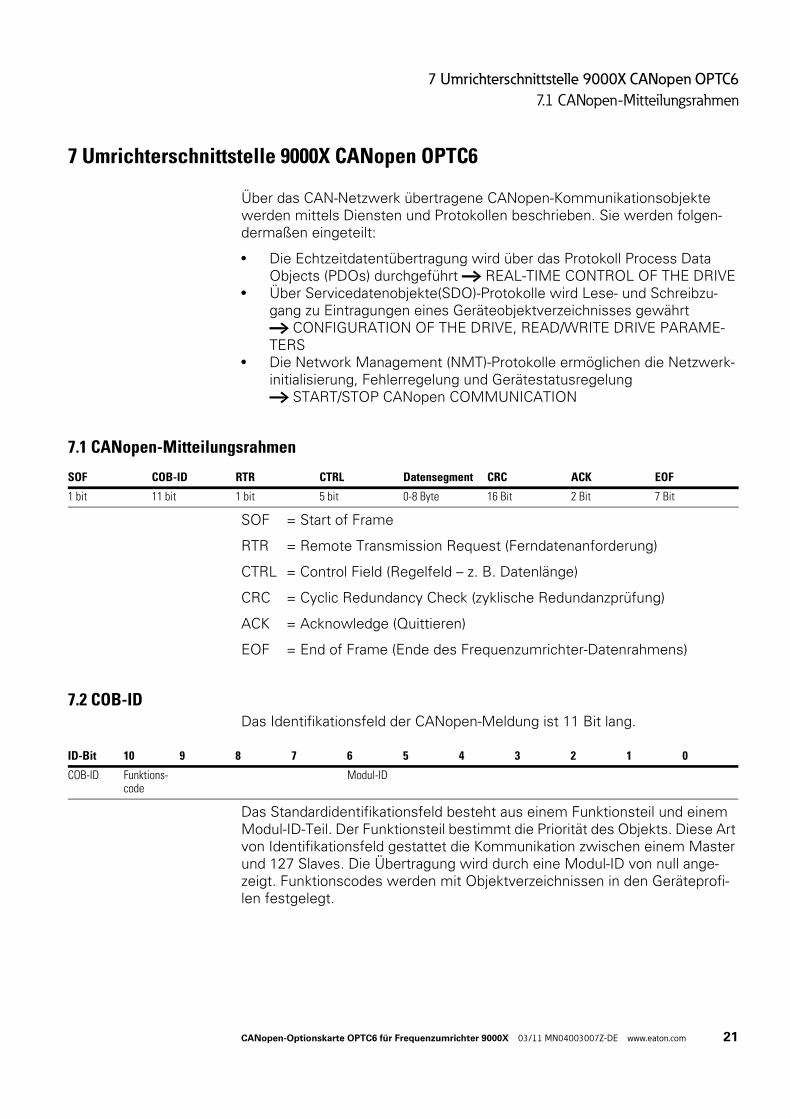
Über das CAN-Netzwerk übertragene CANopen-Kommunikationsobjekte werden mittels Diensten und Protokollen beschrieben. Sie werden folgen-dermaßen eingeteilt:
• Die Echtzeitdatentübertragung wird über das Protokoll Process Data Objects (PDOs) durchgeführt → REAL-TIME CONTROL OF THE DRIVE
• Über Servicedatenobjekte(SDO)-Protokolle wird Lese- und Schreibzu-gang zu Eintragungen eines Geräteobjektverzeichnisses gewährt → CONFIGURATION OF THE DRIVE, READ/WRITE DRIVE PARAME-TERS
• Die Network Management (NMT)-Protokolle ermöglichen die Netzwerk-initialisierung, Fehlerregelung und Gerätestatusregelung→ START/STOP CANopen COMMUNICATION
7.1 CANopen-Mitteilungsrahmen
SOF = Start of Frame
RTR = Remote Transmission Request (Ferndatenanforderung)
CTRL = Control Field (Regelfeld – z. B. Datenlänge)
CRC = Cyclic Redundancy Check (zyklische Redundanzprüfung)
ACK = Acknowledge (Quittieren)
EOF = End of Frame (Ende des Frequenzumrichter-Datenrahmens)
7.2 COB-IDDas Identifikationsfeld der CANopen-Meldung ist 11 Bit lang..
Das Standardidentifikationsfeld besteht aus einem Funktionsteil und einem Modul-ID-Teil. Der Funktionsteil bestimmt die Priorität des Objekts. Diese Art von Identifikationsfeld gestattet die Kommunikation zwischen einem Master und 127 Slaves. Die Übertragung wird durch eine Modul-ID von null ange-zeigt. Funktionscodes werden mit Objektverzeichnissen in den Geräteprofi-len festgelegt.
SOF COB-ID RTR CTRL Datensegment CRC ACK EOF
1 bit 11 bit 1 bit 5 bit 0-8 Byte 16 Bit 2 Bit 7 Bit
ID-Bit 10 9 8 7 6 5 4 3 2 1 0
COB-ID Funktions-code
Modul-ID
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 21
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.3 Vordefinierte Verbindungssätze
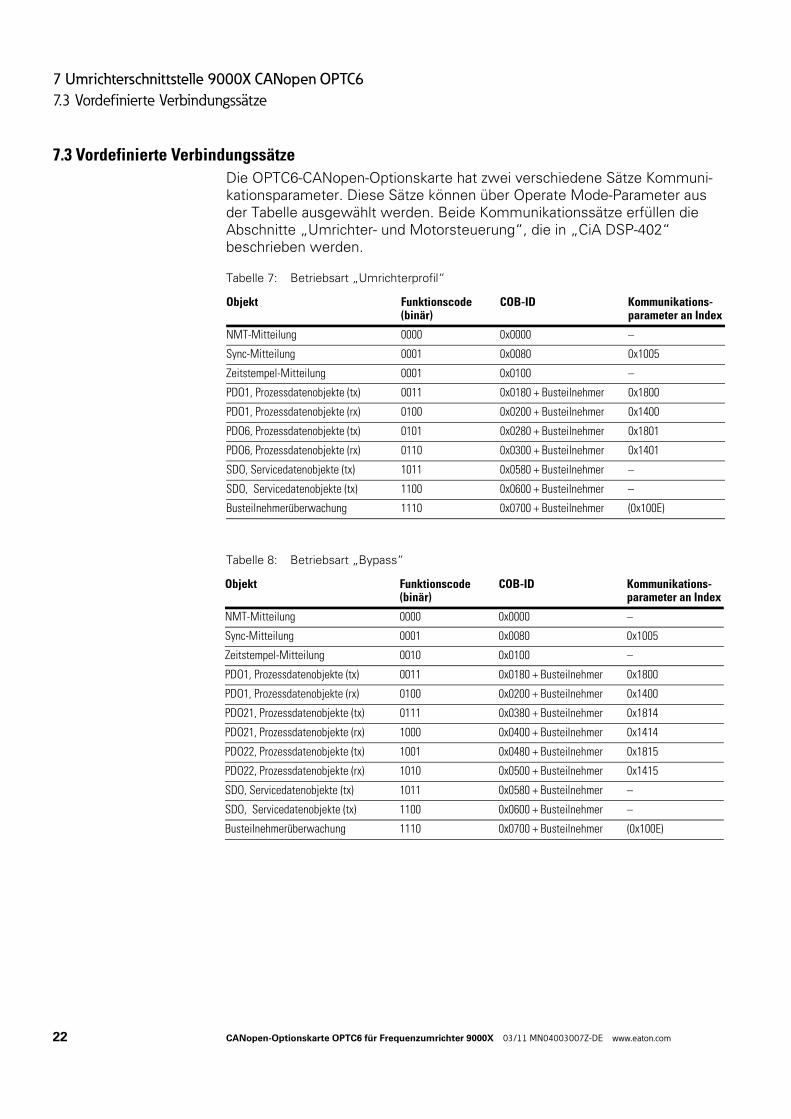
7.3 Vordefinierte VerbindungssätzeDie OPTC6-CANopen-Optionskarte hat zwei verschiedene Sätze Kommuni-kationsparameter. Diese Sätze können über Operate Mode-Parameter aus der Tabelle ausgewählt werden. Beide Kommunikationssätze erfüllen die Abschnitte „Umrichter- und Motorsteuerung“, die in „CiA DSP-402“ beschrieben werden.
Tabelle 7: Betriebsart „Umrichterprofil“
Tabelle 8: Betriebsart „Bypass“
Objekt Funktionscode (binär)
COB-ID Kommunikations-parameter an Index
NMT-Mitteilung 0000 0x0000 –
Sync-Mitteilung 0001 0x0080 0x1005
Zeitstempel-Mitteilung 0001 0x0100 –
PDO1, Prozessdatenobjekte (tx) 0011 0x0180 + Busteilnehmer 0x1800
PDO1, Prozessdatenobjekte (rx) 0100 0x0200 + Busteilnehmer 0x1400
PDO6, Prozessdatenobjekte (tx) 0101 0x0280 + Busteilnehmer 0x1801
PDO6, Prozessdatenobjekte (rx) 0110 0x0300 + Busteilnehmer 0x1401
SDO, Servicedatenobjekte (tx) 1011 0x0580 + Busteilnehmer –
SDO, Servicedatenobjekte (tx) 1100 0x0600 + Busteilnehmer –
Busteilnehmerüberwachung 1110 0x0700 + Busteilnehmer (0x100E)
Objekt Funktionscode(binär)
COB-ID Kommunikations-parameter an Index
NMT-Mitteilung 0000 0x0000 –
Sync-Mitteilung 0001 0x0080 0x1005
Zeitstempel-Mitteilung 0010 0x0100 –
PDO1, Prozessdatenobjekte (tx) 0011 0x0180 + Busteilnehmer 0x1800
PDO1, Prozessdatenobjekte (rx) 0100 0x0200 + Busteilnehmer 0x1400
PDO21, Prozessdatenobjekte (tx) 0111 0x0380 + Busteilnehmer 0x1814
PDO21, Prozessdatenobjekte (rx) 1000 0x0400 + Busteilnehmer 0x1414
PDO22, Prozessdatenobjekte (tx) 1001 0x0480 + Busteilnehmer 0x1815
PDO22, Prozessdatenobjekte (rx) 1010 0x0500 + Busteilnehmer 0x1415
SDO, Servicedatenobjekte (tx) 1011 0x0580 + Busteilnehmer –
SDO, Servicedatenobjekte (tx) 1100 0x0600 + Busteilnehmer –
Busteilnehmerüberwachung 1110 0x0700 + Busteilnehmer (0x100E)
22 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.4 Netzwerkmanagement (NMT)
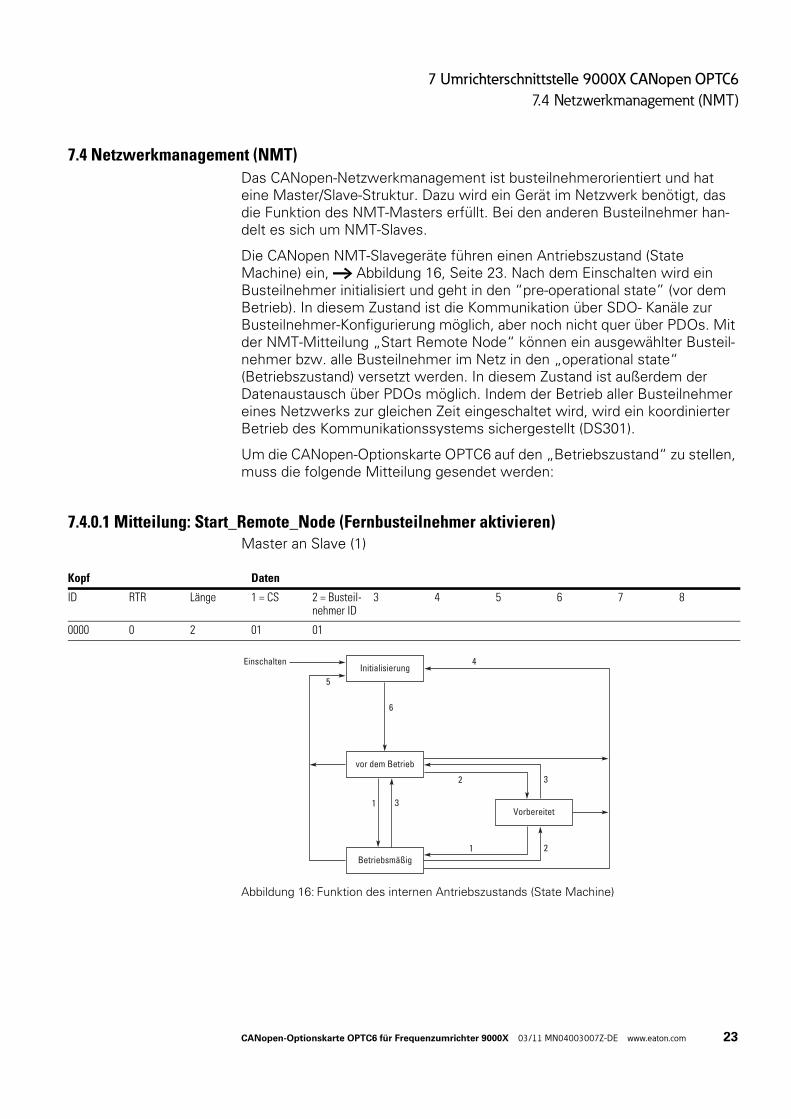
7.4 Netzwerkmanagement (NMT)Das CANopen-Netzwerkmanagement ist busteilnehmerorientiert und hat eine Master/Slave-Struktur. Dazu wird ein Gerät im Netzwerk benötigt, das die Funktion des NMT-Masters erfüllt. Bei den anderen Busteilnehmer han-delt es sich um NMT-Slaves.
Die CANopen NMT-Slavegeräte führen einen Antriebszustand (State Machine) ein, → Abbildung 16, Seite 23. Nach dem Einschalten wird ein Busteilnehmer initialisiert und geht in den “pre-operational state” (vor dem Betrieb). In diesem Zustand ist die Kommunikation über SDO- Kanäle zur Busteilnehmer-Konfigurierung möglich, aber noch nicht quer über PDOs. Mit der NMT-Mitteilung „Start Remote Node“ können ein ausgewählter Busteil-nehmer bzw. alle Busteilnehmer im Netz in den „operational state“ (Betriebszustand) versetzt werden. In diesem Zustand ist außerdem der Datenaustausch über PDOs möglich. Indem der Betrieb aller Busteilnehmer eines Netzwerks zur gleichen Zeit eingeschaltet wird, wird ein koordinierter Betrieb des Kommunikationssystems sichergestellt (DS301).
Um die CANopen-Optionskarte OPTC6 auf den „Betriebszustand“ zu stellen, muss die folgende Mitteilung gesendet werden:
7.4.0.1 Mitteilung: Start_Remote_Node (Fernbusteilnehmer aktivieren)Master an Slave (1)
Abbildung 16: Funktion des internen Antriebszustands (State Machine)
Kopf Daten
ID RTR Länge 1 = CS 2 = Busteil-nehmer ID
3 4 5 6 7 8
0000 0 2 01 01
Einschalten
5
2
4
1
6
1
Initialisierung
3
3
2
vor dem Betrieb
Betriebsmäßig
Vorbereitet
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 23
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.5 Prozessdatenobjekte (PDO)
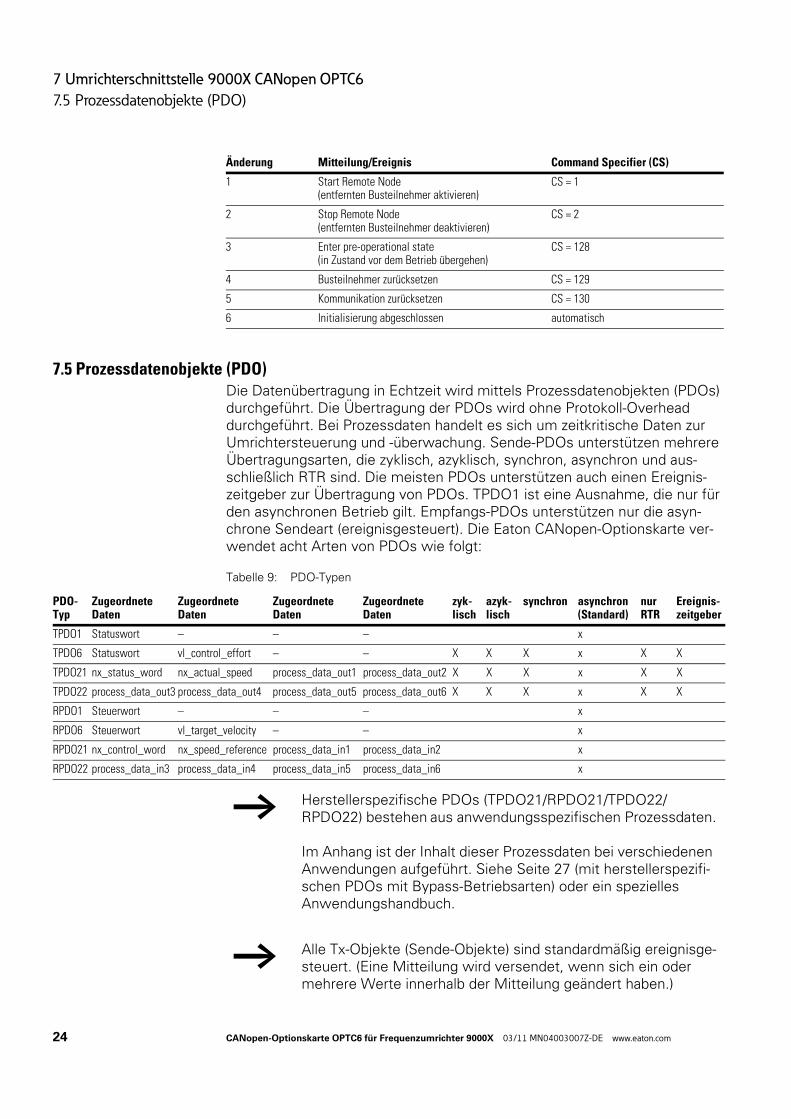
7.5 Prozessdatenobjekte (PDO)Die Datenübertragung in Echtzeit wird mittels Prozessdatenobjekten (PDOs) durchgeführt. Die Übertragung der PDOs wird ohne Protokoll-Overhead durchgeführt. Bei Prozessdaten handelt es sich um zeitkritische Daten zur Umrichtersteuerung und -überwachung. Sende-PDOs unterstützen mehrere Übertragungsarten, die zyklisch, azyklisch, synchron, asynchron und aus-schließlich RTR sind. Die meisten PDOs unterstützen auch einen Ereignis-zeitgeber zur Übertragung von PDOs. TPDO1 ist eine Ausnahme, die nur für den asynchronen Betrieb gilt. Empfangs-PDOs unterstützen nur die asyn-chrone Sendeart (ereignisgesteuert). Die Eaton CANopen-Optionskarte ver-wendet acht Arten von PDOs wie folgt:
Tabelle 9: PDO-Typen
Änderung Mitteilung/Ereignis Command Specifier (CS)
1 Start Remote Node(entfernten Busteilnehmer aktivieren)
CS = 1
2 Stop Remote Node(entfernten Busteilnehmer deaktivieren)
CS = 2
3 Enter pre-operational state(in Zustand vor dem Betrieb übergehen)
CS = 128
4 Busteilnehmer zurücksetzen CS = 129
5 Kommunikation zurücksetzen CS = 130
6 Initialisierung abgeschlossen automatisch
PDO-Typ
Zugeordnete Daten
Zugeordnete Daten
Zugeordnete Daten
Zugeordnete Daten
zyk-lisch
azyk-lisch
synchron asynchron(Standard)
nurRTR
Ereignis-zeitgeber
TPDO1 Statuswort – – – x
TPDO6 Statuswort vl_control_effort – – X X X x X X
TPDO21 nx_status_word nx_actual_speed process_data_out1 process_data_out2 X X X x X X
TPDO22 process_data_out3 process_data_out4 process_data_out5 process_data_out6 X X X x X X
RPDO1 Steuerwort – – – x
RPDO6 Steuerwort vl_target_velocity – – x
RPDO21 nx_control_word nx_speed_reference process_data_in1 process_data_in2 x
RPDO22 process_data_in3 process_data_in4 process_data_in5 process_data_in6 x
→ Herstellerspezifische PDOs (TPDO21/RPDO21/TPDO22/RPDO22) bestehen aus anwendungsspezifischen Prozessdaten.
Im Anhang ist der Inhalt dieser Prozessdaten bei verschiedenen Anwendungen aufgeführt. Siehe Seite 27 (mit herstellerspezifi-schen PDOs mit Bypass-Betriebsarten) oder ein spezielles Anwendungshandbuch.
→ Alle Tx-Objekte (Sende-Objekte) sind standardmäßig ereignisge-steuert. (Eine Mitteilung wird versendet, wenn sich ein oder mehrere Werte innerhalb der Mitteilung geändert haben.)
24 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.6 Übertragungsarten
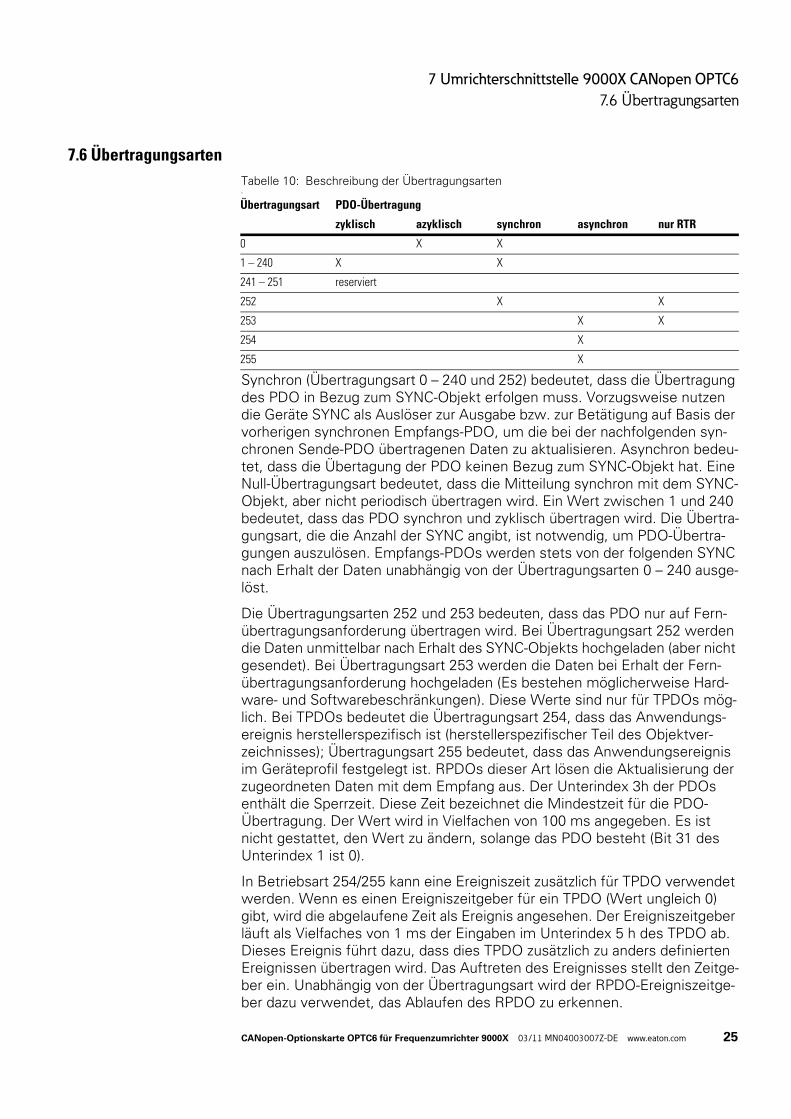
7.6 ÜbertragungsartenTabelle 10: Beschreibung der Übertragungsartens
Synchron (Übertragungsart 0 – 240 und 252) bedeutet, dass die Übertragung des PDO in Bezug zum SYNC-Objekt erfolgen muss. Vorzugsweise nutzen die Geräte SYNC als Auslöser zur Ausgabe bzw. zur Betätigung auf Basis der vorherigen synchronen Empfangs-PDO, um die bei der nachfolgenden syn-chronen Sende-PDO übertragenen Daten zu aktualisieren. Asynchron bedeu-tet, dass die Übertagung der PDO keinen Bezug zum SYNC-Objekt hat. Eine Null-Übertragungsart bedeutet, dass die Mitteilung synchron mit dem SYNC-Objekt, aber nicht periodisch übertragen wird. Ein Wert zwischen 1 und 240 bedeutet, dass das PDO synchron und zyklisch übertragen wird. Die Übertra-gungsart, die die Anzahl der SYNC angibt, ist notwendig, um PDO-Übertra-gungen auszulösen. Empfangs-PDOs werden stets von der folgenden SYNC nach Erhalt der Daten unabhängig von der Übertragungsarten 0 – 240 ausge-löst.
Die Übertragungsarten 252 und 253 bedeuten, dass das PDO nur auf Fern-übertragungsanforderung übertragen wird. Bei Übertragungsart 252 werden die Daten unmittelbar nach Erhalt des SYNC-Objekts hochgeladen (aber nicht gesendet). Bei Übertragungsart 253 werden die Daten bei Erhalt der Fern-übertragungsanforderung hochgeladen (Es bestehen möglicherweise Hard-ware- und Softwarebeschränkungen). Diese Werte sind nur für TPDOs mög-lich. Bei TPDOs bedeutet die Übertragungsart 254, dass das Anwendungs-ereignis herstellerspezifisch ist (herstellerspezifischer Teil des Objektver-zeichnisses); Übertragungsart 255 bedeutet, dass das Anwendungsereignis im Geräteprofil festgelegt ist. RPDOs dieser Art lösen die Aktualisierung der zugeordneten Daten mit dem Empfang aus. Der Unterindex 3h der PDOs enthält die Sperrzeit. Diese Zeit bezeichnet die Mindestzeit für die PDO-Übertragung. Der Wert wird in Vielfachen von 100 ms angegeben. Es ist nicht gestattet, den Wert zu ändern, solange das PDO besteht (Bit 31 des Unterindex 1 ist 0).
In Betriebsart 254/255 kann eine Ereigniszeit zusätzlich für TPDO verwendet werden. Wenn es einen Ereigniszeitgeber für ein TPDO (Wert ungleich 0) gibt, wird die abgelaufene Zeit als Ereignis angesehen. Der Ereigniszeitgeber läuft als Vielfaches von 1 ms der Eingaben im Unterindex 5 h des TPDO ab. Dieses Ereignis führt dazu, dass dies TPDO zusätzlich zu anders definierten Ereignissen übertragen wird. Das Auftreten des Ereignisses stellt den Zeitge-ber ein. Unabhängig von der Übertragungsart wird der RPDO-Ereigniszeitge-ber dazu verwendet, das Ablaufen des RPDO zu erkennen.
Übertragungsart PDO-Übertragung
zyklisch azyklisch synchron asynchron nur RTR
0 X X
1 – 240 X X
241 – 251 reserviert
252 X X
253 X X
254 X
255 X
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 25
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.7 Regelung des Umrichters über PDO-Mitteilungen mit Umrichterprofil
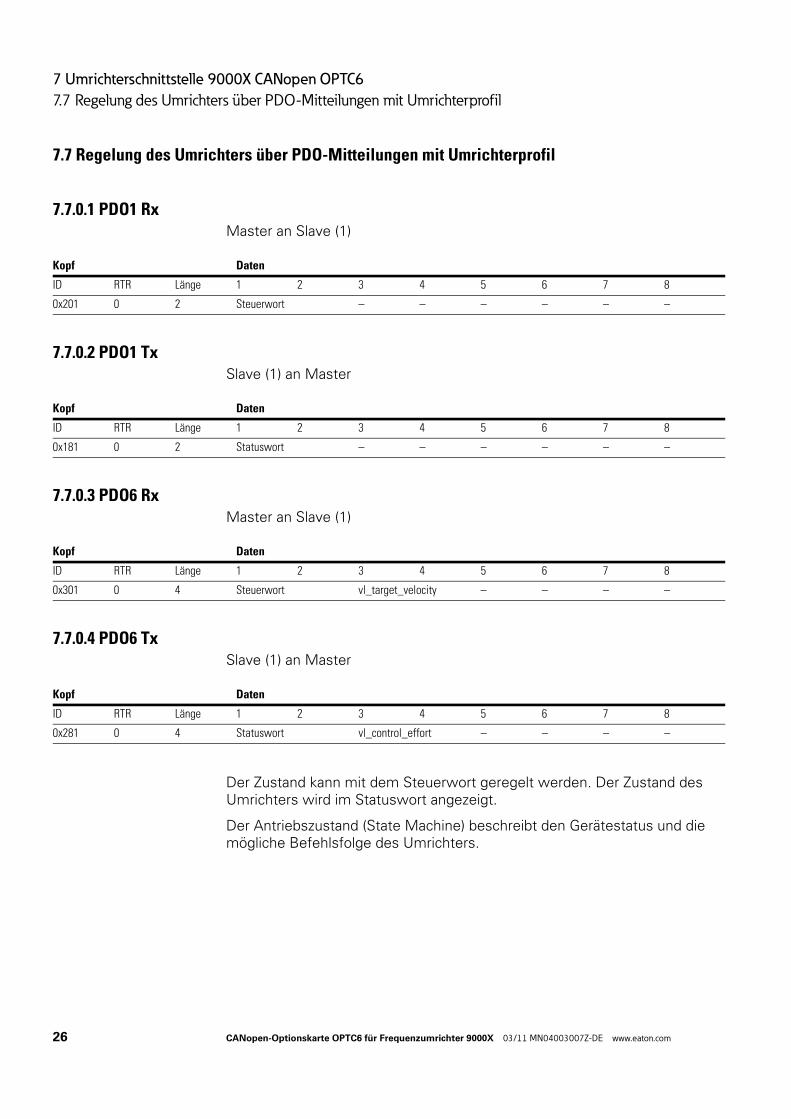
7.7 Regelung des Umrichters über PDO-Mitteilungen mit Umrichterprofil
7.7.0.1 PDO1 RxMaster an Slave (1)
7.7.0.2 PDO1 TxSlave (1) an Master
7.7.0.3 PDO6 RxMaster an Slave (1)
7.7.0.4 PDO6 TxSlave (1) an Master
Der Zustand kann mit dem Steuerwort geregelt werden. Der Zustand des Umrichters wird im Statuswort angezeigt.
Der Antriebszustand (State Machine) beschreibt den Gerätestatus und die mögliche Befehlsfolge des Umrichters.
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x201 0 2 Steuerwort – – – – – –
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x181 0 2 Statuswort – – – – – –
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x301 0 4 Steuerwort vl_target_velocity – – – –
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x281 0 4 Statuswort vl_control_effort – – – –
26 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.7 Regelung des Umrichters über PDO-Mitteilungen mit Umrichterprofil
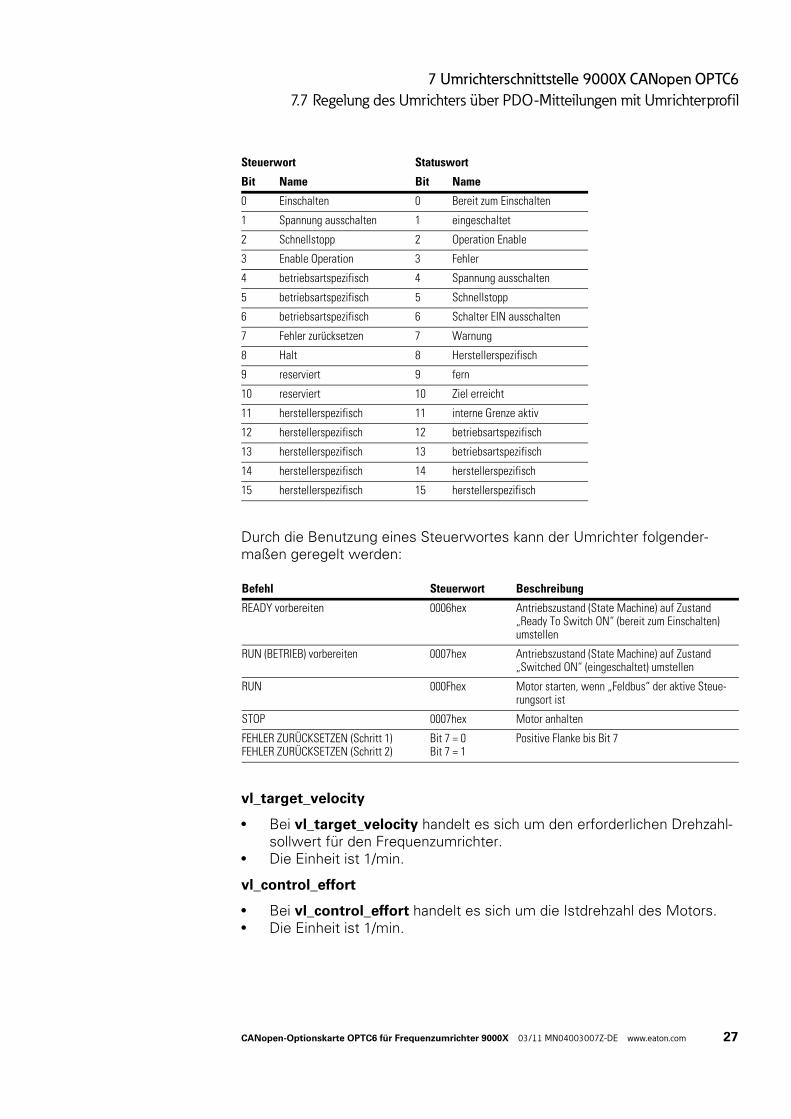
Durch die Benutzung eines Steuerwortes kann der Umrichter folgender-maßen geregelt werden:
vl_target_velocity
• Bei vl_target_velocity handelt es sich um den erforderlichen Drehzahl-sollwert für den Frequenzumrichter.
• Die Einheit ist 1/min.
vl_control_effort
• Bei vl_control_effort handelt es sich um die Istdrehzahl des Motors.• Die Einheit ist 1/min.
Steuerwort Statuswort
Bit Name Bit Name
0 Einschalten 0 Bereit zum Einschalten
1 Spannung ausschalten 1 eingeschaltet
2 Schnellstopp 2 Operation Enable
3 Enable Operation 3 Fehler
4 betriebsartspezifisch 4 Spannung ausschalten
5 betriebsartspezifisch 5 Schnellstopp
6 betriebsartspezifisch 6 Schalter EIN ausschalten
7 Fehler zurücksetzen 7 Warnung
8 Halt 8 Herstellerspezifisch
9 reserviert 9 fern
10 reserviert 10 Ziel erreicht
11 herstellerspezifisch 11 interne Grenze aktiv
12 herstellerspezifisch 12 betriebsartspezifisch
13 herstellerspezifisch 13 betriebsartspezifisch
14 herstellerspezifisch 14 herstellerspezifisch
15 herstellerspezifisch 15 herstellerspezifisch
Befehl Steuerwort Beschreibung
READY vorbereiten 0006hex Antriebszustand (State Machine) auf Zustand „Ready To Switch ON“ (bereit zum Einschalten) umstellen
RUN (BETRIEB) vorbereiten 0007hex Antriebszustand (State Machine) auf Zustand„Switched ON“ (eingeschaltet) umstellen
RUN 000Fhex Motor starten, wenn „Feldbus“ der aktive Steue-rungsort ist
STOP 0007hex Motor anhalten
FEHLER ZURÜCKSETZEN (Schritt 1)FEHLER ZURÜCKSETZEN (Schritt 2)
Bit 7 = 0Bit 7 = 1
Positive Flanke bis Bit 7
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 27
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.8 Antriebszustand (State Machine)
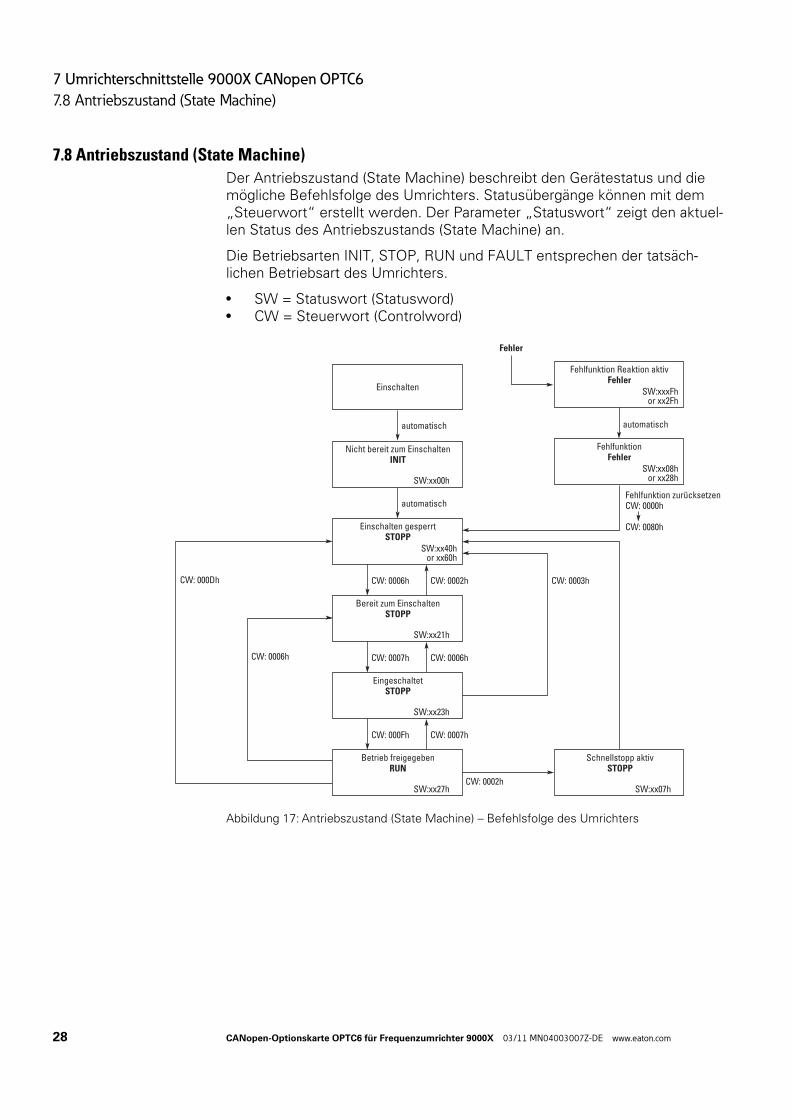
7.8 Antriebszustand (State Machine)Der Antriebszustand (State Machine) beschreibt den Gerätestatus und die mögliche Befehlsfolge des Umrichters. Statusübergänge können mit dem „Steuerwort“ erstellt werden. Der Parameter „Statuswort“ zeigt den aktuel-len Status des Antriebszustands (State Machine) an.
Die Betriebsarten INIT, STOP, RUN und FAULT entsprechen der tatsäch-lichen Betriebsart des Umrichters.
• SW = Statuswort (Statusword)• CW = Steuerwort (Controlword)
Abbildung 17: Antriebszustand (State Machine) – Befehlsfolge des Umrichters
Fehlfunktion zurücksetzenCW: 0000h
CW: 0080h
Einschalten
Nicht bereit zum EinschaltenINIT
SW:xx00h
automatisch
CW: 000Dh
automatisch automatisch
CW: 0006h CW: 0002h CW: 0003h
CW: 0007h CW: 0006h
Bereit zum EinschaltenSTOPP
SW:xx21h
Einschalten gesperrtSTOPP
SW:xx40hor xx60h
CW: 0006h
Fehlfunktion Reaktion aktivFehler
SW:xxxFhor xx2Fh
FehlfunktionFehler
SW:xx08hor xx28h
CW: 000Fh CW: 0007h
CW: 0002h
EingeschaltetSTOPP
SW:xx23h
Betrieb freigegebenRUN
SW:xx27h
Schnellstopp aktivSTOPP
SW:xx07h
Fehler
28 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.9 Herstellerspezifische PDOs mit Bypass-Betriebsarten verwenden
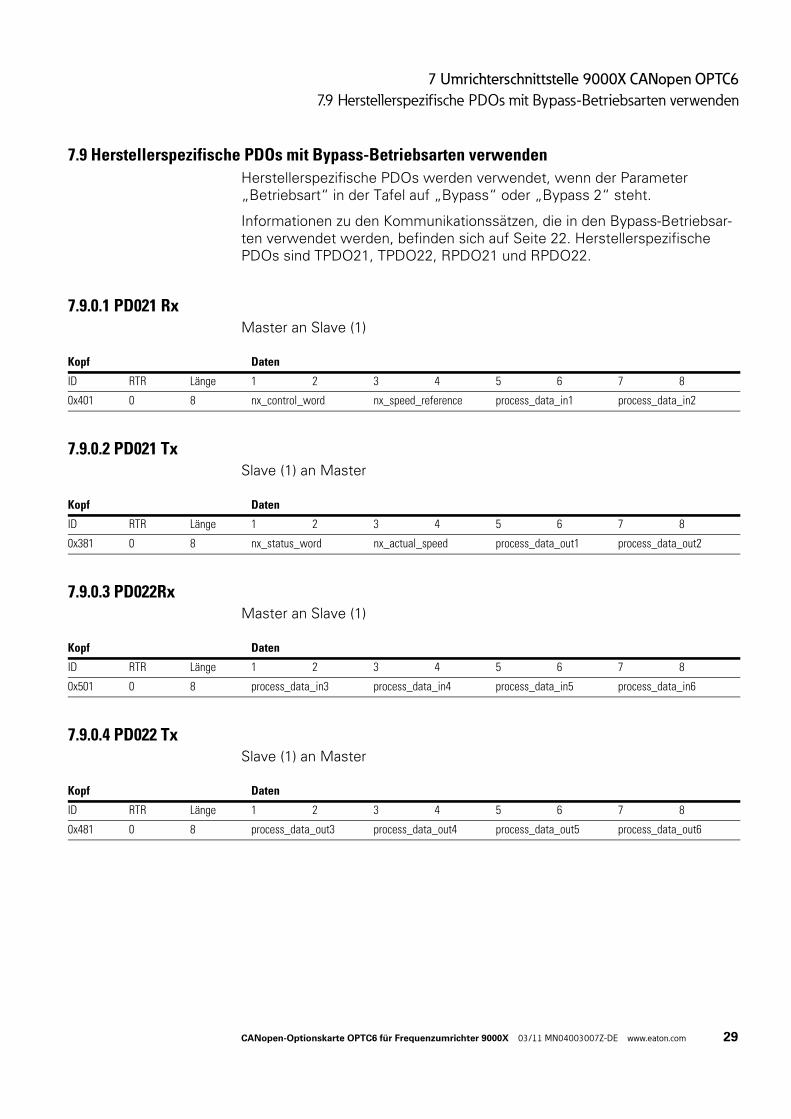
7.9 Herstellerspezifische PDOs mit Bypass-Betriebsarten verwendenHerstellerspezifische PDOs werden verwendet, wenn der Parameter „Betriebsart“ in der Tafel auf „Bypass“ oder „Bypass 2“ steht.
Informationen zu den Kommunikationssätzen, die in den Bypass-Betriebsar-ten verwendet werden, befinden sich auf Seite 22. Herstellerspezifische PDOs sind TPDO21, TPDO22, RPDO21 und RPDO22.
7.9.0.1 PD021 RxMaster an Slave (1)
7.9.0.2 PD021 TxSlave (1) an Master
7.9.0.3 PD022RxMaster an Slave (1)
7.9.0.4 PD022 TxSlave (1) an Master
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x401 0 8 nx_control_word nx_speed_reference process_data_in1 process_data_in2
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x381 0 8 nx_status_word nx_actual_speed process_data_out1 process_data_out2
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x501 0 8 process_data_in3 process_data_in4 process_data_in5 process_data_in6
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x481 0 8 process_data_out3 process_data_out4 process_data_out5 process_data_out6
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 29
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.10 Regelung des Umrichters 9000X
7.10 Regelung des Umrichters 9000X
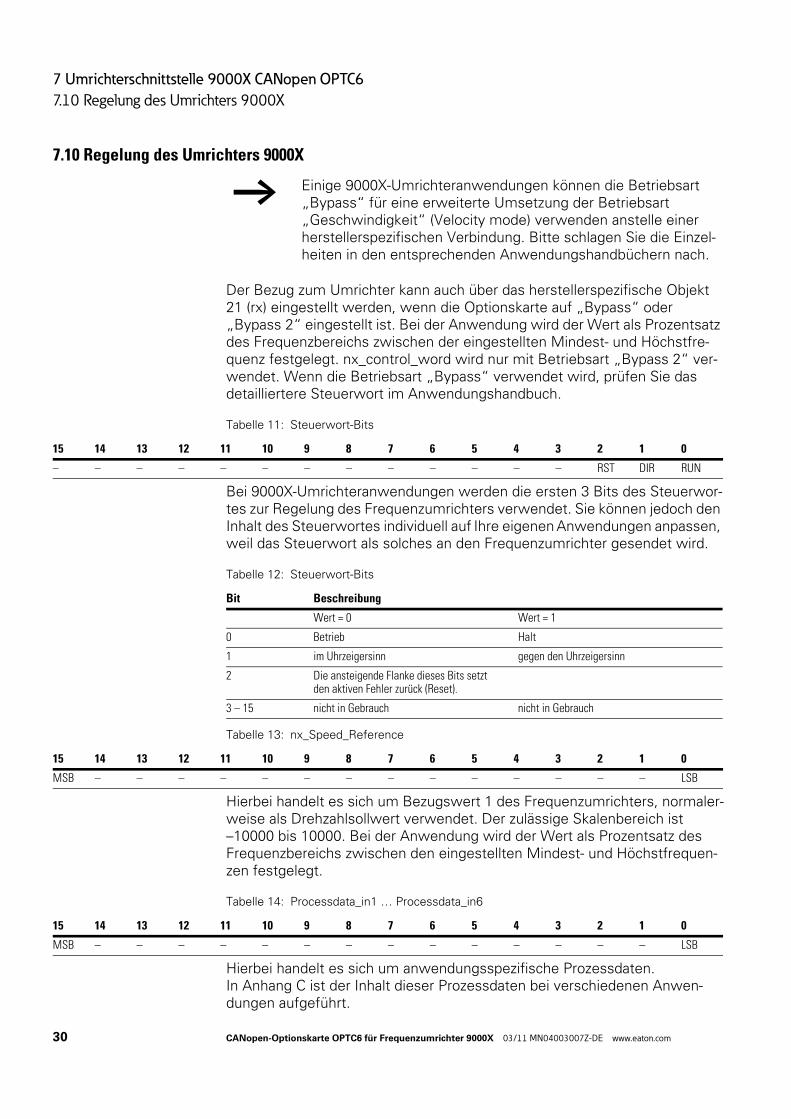
Der Bezug zum Umrichter kann auch über das herstellerspezifische Objekt 21 (rx) eingestellt werden, wenn die Optionskarte auf „Bypass“ oder „Bypass 2“ eingestellt ist. Bei der Anwendung wird der Wert als Prozentsatz des Frequenzbereichs zwischen der eingestellten Mindest- und Höchstfre-quenz festgelegt. nx_control_word wird nur mit Betriebsart „Bypass 2“ ver-wendet. Wenn die Betriebsart „Bypass“ verwendet wird, prüfen Sie das detailliertere Steuerwort im Anwendungshandbuch.
Tabelle 11: Steuerwort-Bits
Bei 9000X-Umrichteranwendungen werden die ersten 3 Bits des Steuerwor-tes zur Regelung des Frequenzumrichters verwendet. Sie können jedoch den Inhalt des Steuerwortes individuell auf Ihre eigenen Anwendungen anpassen, weil das Steuerwort als solches an den Frequenzumrichter gesendet wird.
Tabelle 12: Steuerwort-Bits
Tabelle 13: nx_Speed_Reference
Hierbei handelt es sich um Bezugswert 1 des Frequenzumrichters, normaler-weise als Drehzahlsollwert verwendet. Der zulässige Skalenbereich ist–10000 bis 10000. Bei der Anwendung wird der Wert als Prozentsatz des Frequenzbereichs zwischen den eingestellten Mindest- und Höchstfrequen-zen festgelegt.
Tabelle 14: Processdata_in1 … Processdata_in6
Hierbei handelt es sich um anwendungsspezifische Prozessdaten.In Anhang C ist der Inhalt dieser Prozessdaten bei verschiedenen Anwen-dungen aufgeführt.
→ Einige 9000X-Umrichteranwendungen können die Betriebsart „Bypass“ für eine erweiterte Umsetzung der Betriebsart „Geschwindigkeit“ (Velocity mode) verwenden anstelle einer herstellerspezifischen Verbindung. Bitte schlagen Sie die Einzel-heiten in den entsprechenden Anwendungshandbüchern nach.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
– – – – – – – – – – – – – RST DIR RUN
Bit Beschreibung
Wert = 0 Wert = 1
0 Betrieb Halt
1 im Uhrzeigersinn gegen den Uhrzeigersinn
2 Die ansteigende Flanke dieses Bits setztden aktiven Fehler zurück (Reset).
3 – 15 nicht in Gebrauch nicht in Gebrauch
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB – – – – – – – – – – – – – – LSB
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB – – – – – – – – – – – – – – LSB
30 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.11 Umrichterüberwachung
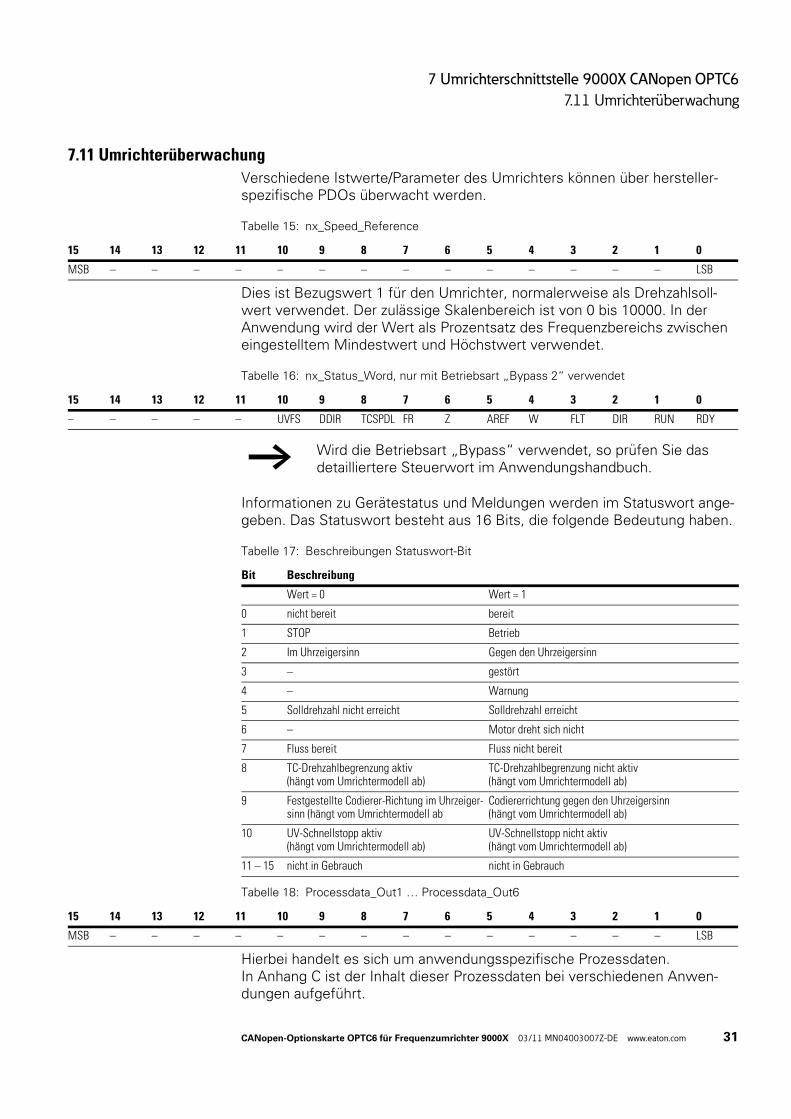
7.11 UmrichterüberwachungVerschiedene Istwerte/Parameter des Umrichters können über hersteller-spezifische PDOs überwacht werden.
Tabelle 15: nx_Speed_Reference
Dies ist Bezugswert 1 für den Umrichter, normalerweise als Drehzahlsoll-wert verwendet. Der zulässige Skalenbereich ist von 0 bis 10000. In der Anwendung wird der Wert als Prozentsatz des Frequenzbereichs zwischen eingestelltem Mindestwert und Höchstwert verwendet.
Tabelle 16: nx_Status_Word, nur mit Betriebsart „Bypass 2“ verwendet
Informationen zu Gerätestatus und Meldungen werden im Statuswort ange-geben. Das Statuswort besteht aus 16 Bits, die folgende Bedeutung haben.
Tabelle 17: Beschreibungen Statuswort-Bit
Tabelle 18: Processdata_Out1 … Processdata_Out6
Hierbei handelt es sich um anwendungsspezifische Prozessdaten.In Anhang C ist der Inhalt dieser Prozessdaten bei verschiedenen Anwen-dungen aufgeführt.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB – – – – – – – – – – – – – – LSB
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
– – – – – UVFS DDIR TCSPDL FR Z AREF W FLT DIR RUN RDY
→ Wird die Betriebsart „Bypass“ verwendet, so prüfen Sie das detailliertere Steuerwort im Anwendungshandbuch.
Bit Beschreibung
Wert = 0 Wert = 1
0 nicht bereit bereit
1 STOP Betrieb
2 Im Uhrzeigersinn Gegen den Uhrzeigersinn
3 – gestört
4 – Warnung
5 Solldrehzahl nicht erreicht Solldrehzahl erreicht
6 – Motor dreht sich nicht
7 Fluss bereit Fluss nicht bereit
8 TC-Drehzahlbegrenzung aktiv(hängt vom Umrichtermodell ab)
TC-Drehzahlbegrenzung nicht aktiv(hängt vom Umrichtermodell ab)
9 Festgestellte Codierer-Richtung im Uhrzeiger-sinn (hängt vom Umrichtermodell ab
Codiererrichtung gegen den Uhrzeigersinn(hängt vom Umrichtermodell ab)
10 UV-Schnellstopp aktiv(hängt vom Umrichtermodell ab)
UV-Schnellstopp nicht aktiv(hängt vom Umrichtermodell ab)
11 – 15 nicht in Gebrauch nicht in Gebrauch
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MSB – – – – – – – – – – – – – – LSB
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 31
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.12 Allparameterdienst (Anyparameter Service)
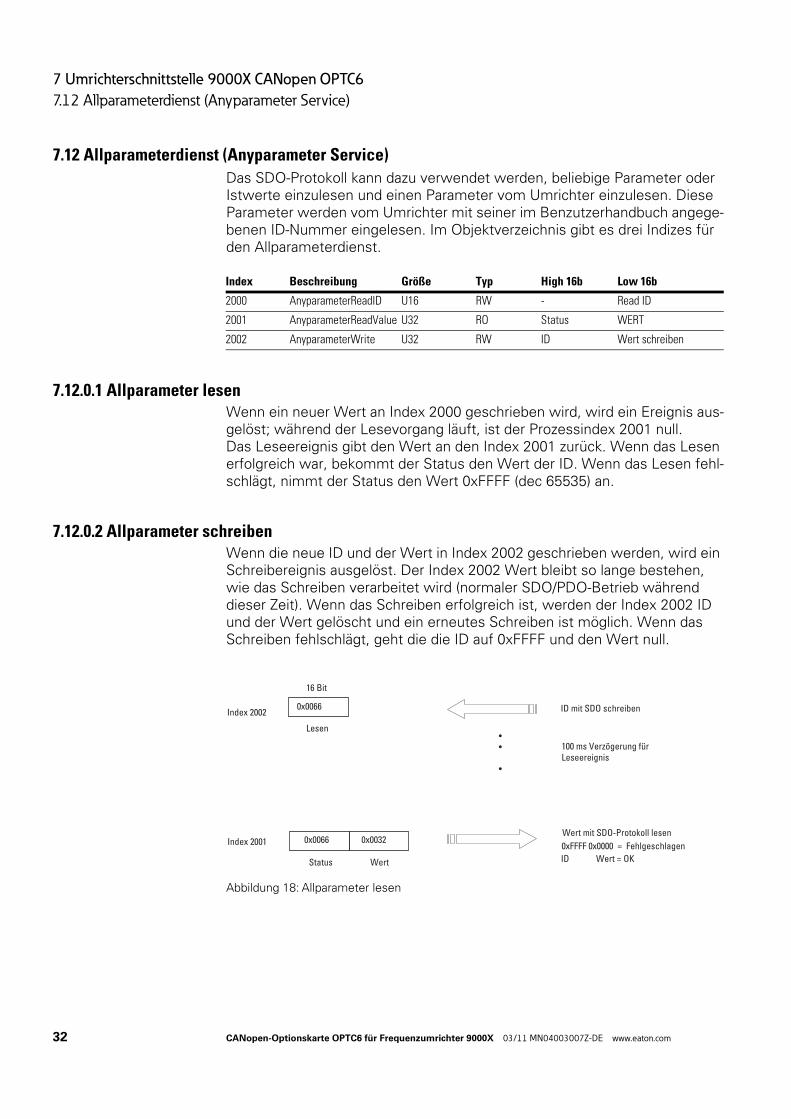
7.12 Allparameterdienst (Anyparameter Service)Das SDO-Protokoll kann dazu verwendet werden, beliebige Parameter oder Istwerte einzulesen und einen Parameter vom Umrichter einzulesen. Diese Parameter werden vom Umrichter mit seiner im Benzutzerhandbuch angege-benen ID-Nummer eingelesen. Im Objektverzeichnis gibt es drei Indizes für den Allparameterdienst.
7.12.0.1 Allparameter lesenWenn ein neuer Wert an Index 2000 geschrieben wird, wird ein Ereignis aus-gelöst; während der Lesevorgang läuft, ist der Prozessindex 2001 null.Das Leseereignis gibt den Wert an den Index 2001 zurück. Wenn das Lesen erfolgreich war, bekommt der Status den Wert der ID. Wenn das Lesen fehl-schlägt, nimmt der Status den Wert 0xFFFF (dec 65535) an.
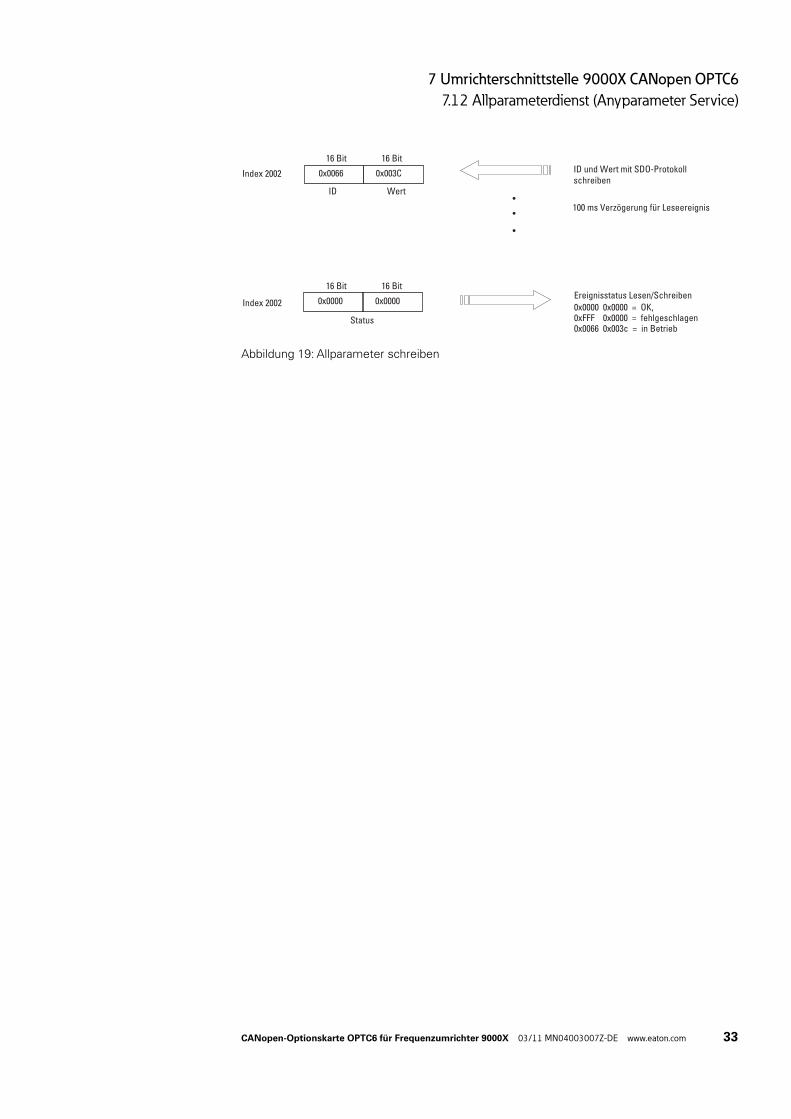
7.12.0.2 Allparameter schreibenWenn die neue ID und der Wert in Index 2002 geschrieben werden, wird ein Schreibereignis ausgelöst. Der Index 2002 Wert bleibt so lange bestehen, wie das Schreiben verarbeitet wird (normaler SDO/PDO-Betrieb während dieser Zeit). Wenn das Schreiben erfolgreich ist, werden der Index 2002 ID und der Wert gelöscht und ein erneutes Schreiben ist möglich. Wenn das Schreiben fehlschlägt, geht die die ID auf 0xFFFF und den Wert null.
Abbildung 18: Allparameter lesen
Index Beschreibung Größe Typ High 16b Low 16b
2000 AnyparameterReadID U16 RW - Read ID
2001 AnyparameterReadValue U32 RO Status WERT
2002 AnyparameterWrite U32 RW ID Wert schreiben
Index 2002
16 Bit
0x0066
Lesen
Index 2001 0x0066 0x0032
Status
ID mit SDO schreiben
Wert
100 ms Verzögerung für
Leseereignis
0xFFFF 0x0000 = Fehlgeschlagen
ID Wert = OK
•
•
•
Wert mit SDO-Protokoll lesen
32 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.12 Allparameterdienst (Anyparameter Service)
Abbildung 19: Allparameter schreiben
Index 2002
16 Bit
ID
Index 2002 0x0000 0x0000
Status
100 ms Verzögerung für Leseereignis
Ereignisstatus Lesen/Schreiben
0x0000 0x0000 = OK,0xFFF 0x0000 = fehlgeschlagen0x0066 0x003c = in Betrieb
•
•
0x0066 0x003C
16 Bit
Wert
ID und Wert mit SDO-Protokoll
schreiben
•
16 Bit 16 Bit
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 33
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.13 Sevicedatenobjekte (SDO)
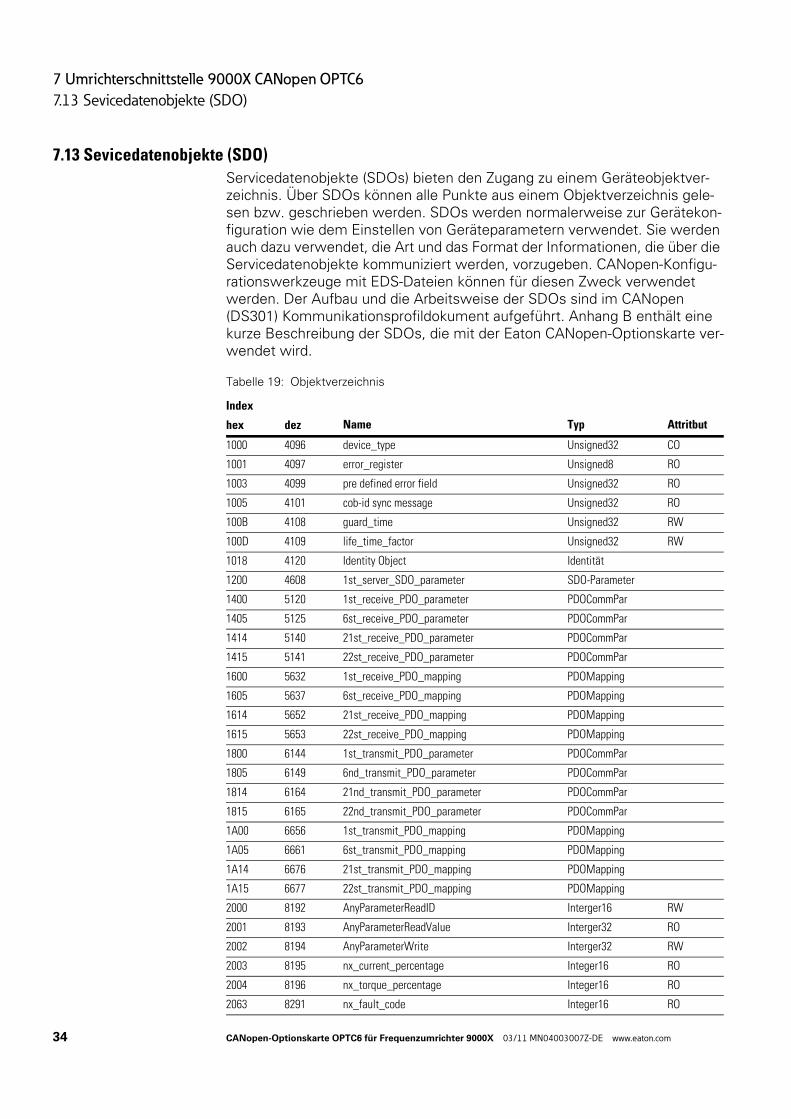
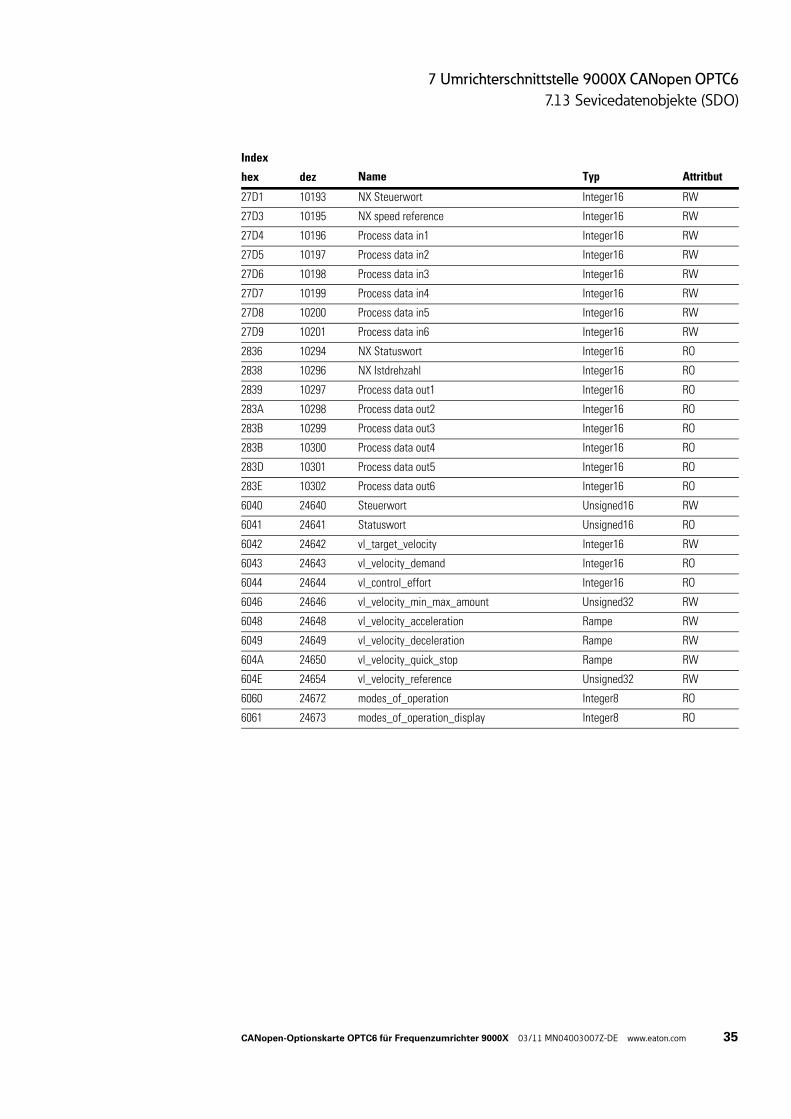
7.13 Sevicedatenobjekte (SDO)Servicedatenobjekte (SDOs) bieten den Zugang zu einem Geräteobjektver-zeichnis. Über SDOs können alle Punkte aus einem Objektverzeichnis gele-sen bzw. geschrieben werden. SDOs werden normalerweise zur Gerätekon-figuration wie dem Einstellen von Geräteparametern verwendet. Sie werden auch dazu verwendet, die Art und das Format der Informationen, die über die Servicedatenobjekte kommuniziert werden, vorzugeben. CANopen-Konfigu-rationswerkzeuge mit EDS-Dateien können für diesen Zweck verwendet werden. Der Aufbau und die Arbeitsweise der SDOs sind im CANopen (DS301) Kommunikationsprofildokument aufgeführt. Anhang B enthält eine kurze Beschreibung der SDOs, die mit der Eaton CANopen-Optionskarte ver-wendet wird.
Tabelle 19: Objektverzeichnis
Index
hex dez Name Typ Attritbut
1000 4096 device_type Unsigned32 CO
1001 4097 error_register Unsigned8 RO
1003 4099 pre defined error field Unsigned32 RO
1005 4101 cob-id sync message Unsigned32 RO
100B 4108 guard_time Unsigned32 RW
100D 4109 life_time_factor Unsigned32 RW
1018 4120 Identity Object Identität
1200 4608 1st_server_SDO_parameter SDO-Parameter
1400 5120 1st_receive_PDO_parameter PDOCommPar
1405 5125 6st_receive_PDO_parameter PDOCommPar
1414 5140 21st_receive_PDO_parameter PDOCommPar
1415 5141 22st_receive_PDO_parameter PDOCommPar
1600 5632 1st_receive_PDO_mapping PDOMapping
1605 5637 6st_receive_PDO_mapping PDOMapping
1614 5652 21st_receive_PDO_mapping PDOMapping
1615 5653 22st_receive_PDO_mapping PDOMapping
1800 6144 1st_transmit_PDO_parameter PDOCommPar
1805 6149 6nd_transmit_PDO_parameter PDOCommPar
1814 6164 21nd_transmit_PDO_parameter PDOCommPar
1815 6165 22nd_transmit_PDO_parameter PDOCommPar
1A00 6656 1st_transmit_PDO_mapping PDOMapping
1A05 6661 6st_transmit_PDO_mapping PDOMapping
1A14 6676 21st_transmit_PDO_mapping PDOMapping
1A15 6677 22st_transmit_PDO_mapping PDOMapping
2000 8192 AnyParameterReadID Interger16 RW
2001 8193 AnyParameterReadValue Interger32 RO
2002 8194 AnyParameterWrite Interger32 RW
2003 8195 nx_current_percentage Integer16 RO
2004 8196 nx_torque_percentage Integer16 RO
2063 8291 nx_fault_code Integer16 RO
34 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.13 Sevicedatenobjekte (SDO)
27D1 10193 NX Steuerwort Integer16 RW
27D3 10195 NX speed reference Integer16 RW
27D4 10196 Process data in1 Integer16 RW
27D5 10197 Process data in2 Integer16 RW
27D6 10198 Process data in3 Integer16 RW
27D7 10199 Process data in4 Integer16 RW
27D8 10200 Process data in5 Integer16 RW
27D9 10201 Process data in6 Integer16 RW
2836 10294 NX Statuswort Integer16 RO
2838 10296 NX Istdrehzahl Integer16 RO
2839 10297 Process data out1 Integer16 RO
283A 10298 Process data out2 Integer16 RO
283B 10299 Process data out3 Integer16 RO
283B 10300 Process data out4 Integer16 RO
283D 10301 Process data out5 Integer16 RO
283E 10302 Process data out6 Integer16 RO
6040 24640 Steuerwort Unsigned16 RW
6041 24641 Statuswort Unsigned16 RO
6042 24642 vl_target_velocity Integer16 RW
6043 24643 vl_velocity_demand Integer16 RO
6044 24644 vl_control_effort Integer16 RO
6046 24646 vl_velocity_min_max_amount Unsigned32 RW
6048 24648 vl_velocity_acceleration Rampe RW
6049 24649 vl_velocity_deceleration Rampe RW
604A 24650 vl_velocity_quick_stop Rampe RW
604E 24654 vl_velocity_reference Unsigned32 RW
6060 24672 modes_of_operation Integer8 RO
6061 24673 modes_of_operation_display Integer8 RO
Index
hex dez Name Typ Attritbut
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 35
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
7.14 Beschreibung des Objektverzeichnisses Abkürzungen
ro nur zum Lesen
wo nur zum Schreiben
rw lesen schreiben
co Konstante
bool Boolean
i8 Integer8
i16 Integer16
i32 Integer32
u8 Unsigned8
u16 Unsigned16
u32 Unsigned32
float Fließkomma
36 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
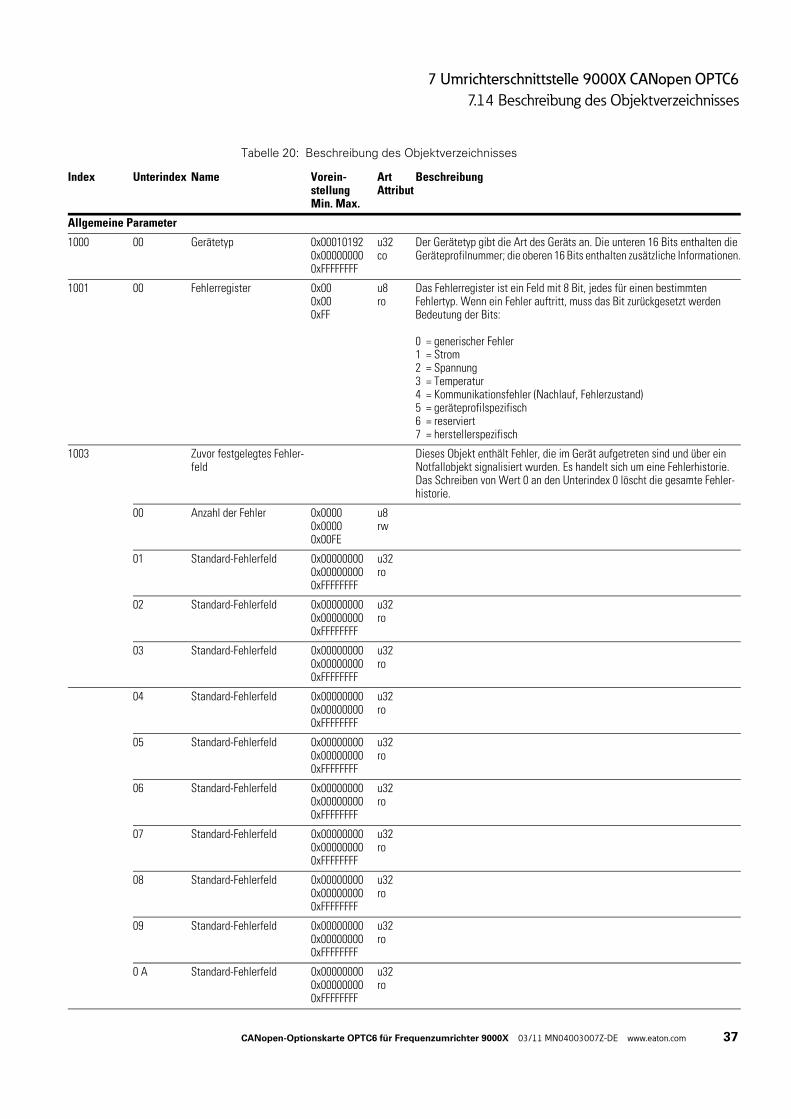
Tabelle 20: Beschreibung des Objektverzeichnisses
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
Allgemeine Parameter
1000 00 Gerätetyp 0x000101920x000000000xFFFFFFFF
u32co
Der Gerätetyp gibt die Art des Geräts an. Die unteren 16 Bits enthalten die Geräteprofilnummer; die oberen 16 Bits enthalten zusätzliche Informationen.
1001 00 Fehlerregister 0x000x000xFF
u8ro
Das Fehlerregister ist ein Feld mit 8 Bit, jedes für einen bestimmten Fehlertyp. Wenn ein Fehler auftritt, muss das Bit zurückgesetzt werdenBedeutung der Bits:
0 = generischer Fehler1 = Strom2 = Spannung3 = Temperatur4 = Kommunikationsfehler (Nachlauf, Fehlerzustand)5 = geräteprofilspezifisch6 = reserviert7 = herstellerspezifisch
1003 Zuvor festgelegtes Fehler-feld
Dieses Objekt enthält Fehler, die im Gerät aufgetreten sind und über ein Notfallobjekt signalisiert wurden. Es handelt sich um eine Fehlerhistorie. Das Schreiben von Wert 0 an den Unterindex 0 löscht die gesamte Fehler-historie.
00 Anzahl der Fehler 0x00000x00000x00FE
u8rw
01 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
02 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
03 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
04 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
05 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
06 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
07 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
08 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
09 Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
0 A Standard-Fehlerfeld 0x00000000 0x00000000 0xFFFFFFFF
u32 ro
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 37
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
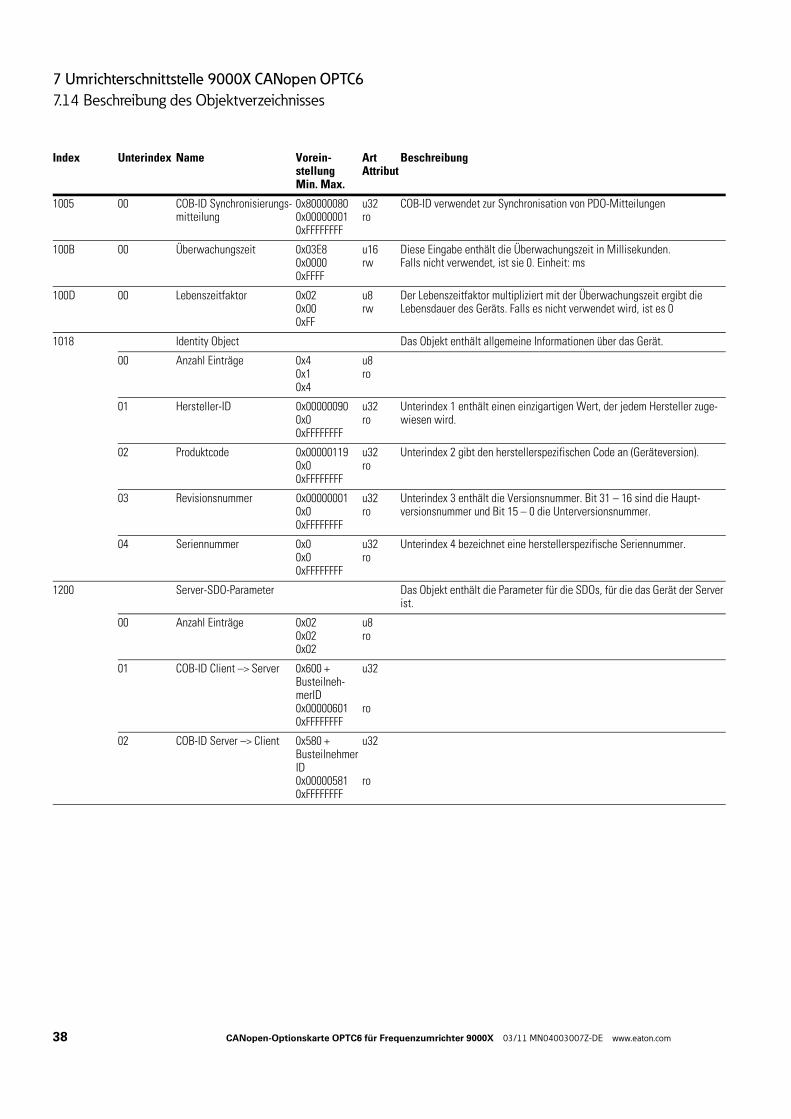
1005 00 COB-ID Synchronisierungs-mitteilung
0x800000800x000000010xFFFFFFFF
u32 ro
COB-ID verwendet zur Synchronisation von PDO-Mitteilungen
100B 00 Überwachungszeit 0x03E80x00000xFFFF
u16 rw
Diese Eingabe enthält die Überwachungszeit in Millisekunden.Falls nicht verwendet, ist sie 0. Einheit: ms
100D 00 Lebenszeitfaktor 0x020x000xFF
u8 rw
Der Lebenszeitfaktor multipliziert mit der Überwachungszeit ergibt die Lebensdauer des Geräts. Falls es nicht verwendet wird, ist es 0
1018 Identity Object Das Objekt enthält allgemeine Informationen über das Gerät.
00 Anzahl Einträge 0x40x10x4
u8 ro
01 Hersteller-ID 0x00000090 0x0 0xFFFFFFFF
u32 ro
Unterindex 1 enthält einen einzigartigen Wert, der jedem Hersteller zuge-wiesen wird.
02 Produktcode 0x00000119 0x0 0xFFFFFFFF
u32 ro
Unterindex 2 gibt den herstellerspezifischen Code an (Geräteversion).
03 Revisionsnummer 0x00000001 0x0 0xFFFFFFFF
u32 ro
Unterindex 3 enthält die Versionsnummer. Bit 31 – 16 sind die Haupt-versionsnummer und Bit 15 – 0 die Unterversionsnummer.
04 Seriennummer 0x00x00xFFFFFFFF
u32 ro
Unterindex 4 bezeichnet eine herstellerspezifische Seriennummer.
1200 Server-SDO-Parameter Das Objekt enthält die Parameter für die SDOs, für die das Gerät der Server ist.
00 Anzahl Einträge 0x02 0x02 0x02
u8 ro
01 COB-ID Client –> Server 0x600 + Busteilneh-merID 0x00000601 0xFFFFFFFF
u32
ro
02 COB-ID Server –> Client 0x580 + Busteilnehmer ID 0x00000581 0xFFFFFFFF
u32
ro
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
38 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
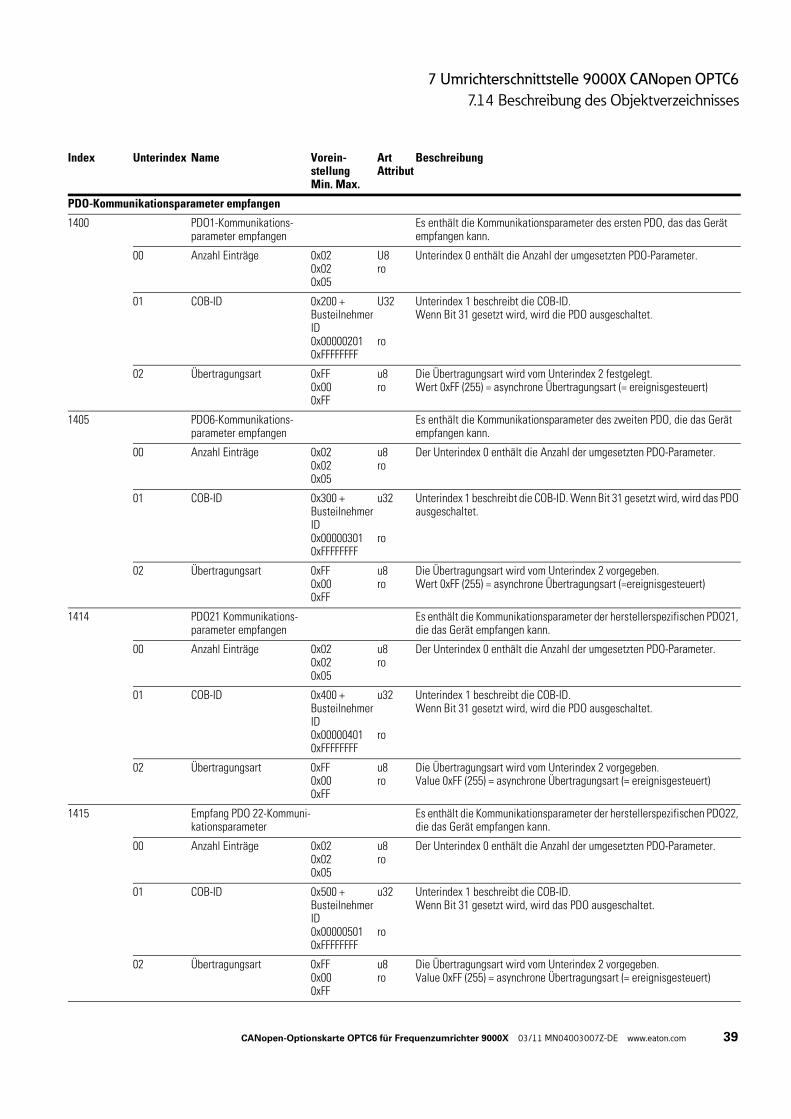
PDO-Kommunikationsparameter empfangen
1400 PDO1-Kommunikations-parameter empfangen
Es enthält die Kommunikationsparameter des ersten PDO, das das Gerät empfangen kann.
00 Anzahl Einträge 0x02 0x02 0x05
U8 ro
Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x200 + Busteilnehmer ID0x00000201 0xFFFFFFFF
U32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird die PDO ausgeschaltet.
02 Übertragungsart 0xFF0x000xFF
u8 ro
Die Übertragungsart wird vom Unterindex 2 festgelegt.Wert 0xFF (255) = asynchrone Übertragungsart (= ereignisgesteuert)
1405 PDO6-Kommunikations-parameter empfangen
Es enthält die Kommunikationsparameter des zweiten PDO, die das Gerät empfangen kann.
00 Anzahl Einträge 0x02 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x300 + Busteilnehmer ID 0x00000301 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID. Wenn Bit 31 gesetzt wird, wird das PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x00 0xFF
u8 ro
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Wert 0xFF (255) = asynchrone Übertragungsart (=ereignisgesteuert)
1414 PDO21 Kommunikations-parameter empfangen
Es enthält die Kommunikationsparameter der herstellerspezifischen PDO21, die das Gerät empfangen kann.
00 Anzahl Einträge 0x02 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x400 + Busteilnehmer ID 0x00000401 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird die PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x00 0xFF
u8 ro
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Value 0xFF (255) = asynchrone Übertragungsart (= ereignisgesteuert)
1415 Empfang PDO 22-Kommuni-kationsparameter
Es enthält die Kommunikationsparameter der herstellerspezifischen PDO22, die das Gerät empfangen kann.
00 Anzahl Einträge 0x02 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x500 + Busteilnehmer ID 0x00000501 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird das PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x00 0xFF
u8 ro
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Value 0xFF (255) = asynchrone Übertragungsart (= ereignisgesteuert)
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 39
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
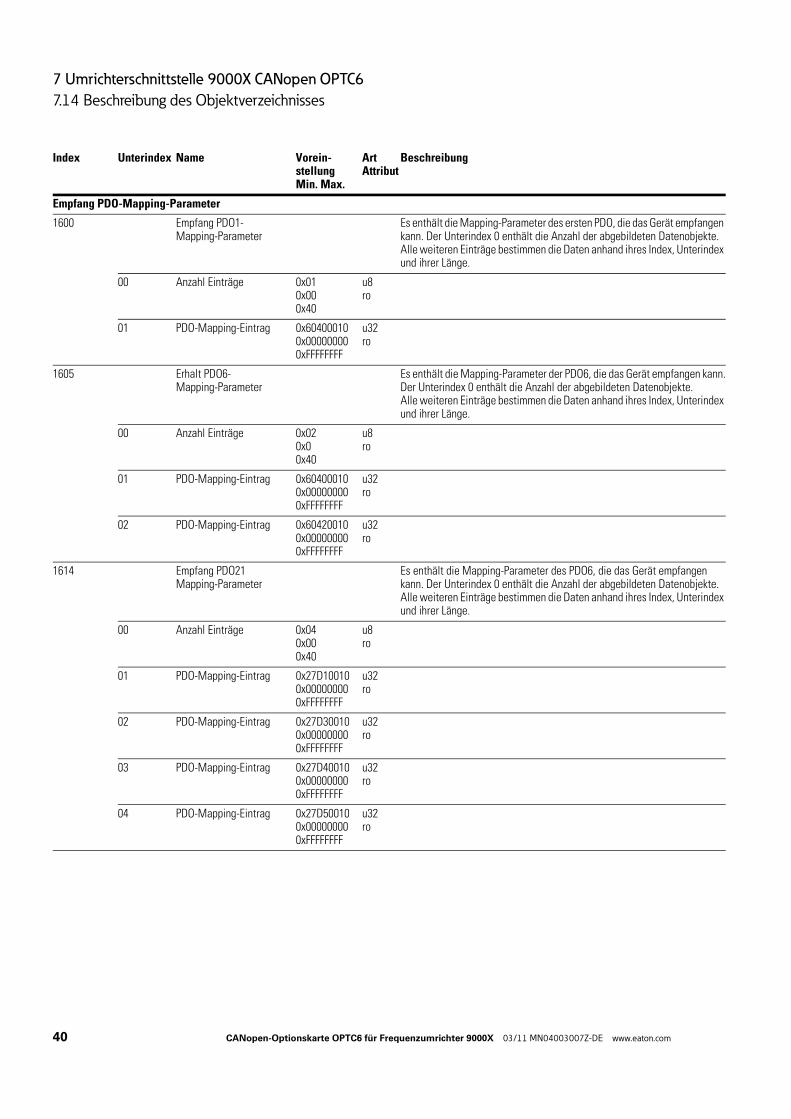
Empfang PDO-Mapping-Parameter
1600 Empfang PDO1-Mapping-Parameter
Es enthält die Mapping-Parameter des ersten PDO, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte. Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge.
00 Anzahl Einträge 0x01 0x00 0x40
u8 ro
01 PDO-Mapping-Eintrag 0x60400010 0x00000000 0xFFFFFFFF
u32 ro
1605 Erhalt PDO6-Mapping-Parameter
Es enthält die Mapping-Parameter der PDO6, die das Gerät empfangen kann.Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge.
00 Anzahl Einträge 0x02 0x0 0x40
u8 ro
01 PDO-Mapping-Eintrag 0x60400010 0x00000000 0xFFFFFFFF
u32 ro
02 PDO-Mapping-Eintrag 0x60420010 0x00000000 0xFFFFFFFF
u32 ro
1614 Empfang PDO21Mapping-Parameter
Es enthält die Mapping-Parameter des PDO6, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge.
00 Anzahl Einträge 0x04 0x000x40
u8 ro
01 PDO-Mapping-Eintrag 0x27D10010 0x00000000 0xFFFFFFFF
u32 ro
02 PDO-Mapping-Eintrag 0x27D30010 0x00000000 0xFFFFFFFF
u32 ro
03 PDO-Mapping-Eintrag 0x27D40010 0x00000000 0xFFFFFFFF
u32 ro
04 PDO-Mapping-Eintrag 0x27D50010 0x00000000 0xFFFFFFFF
u32 ro
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
40 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
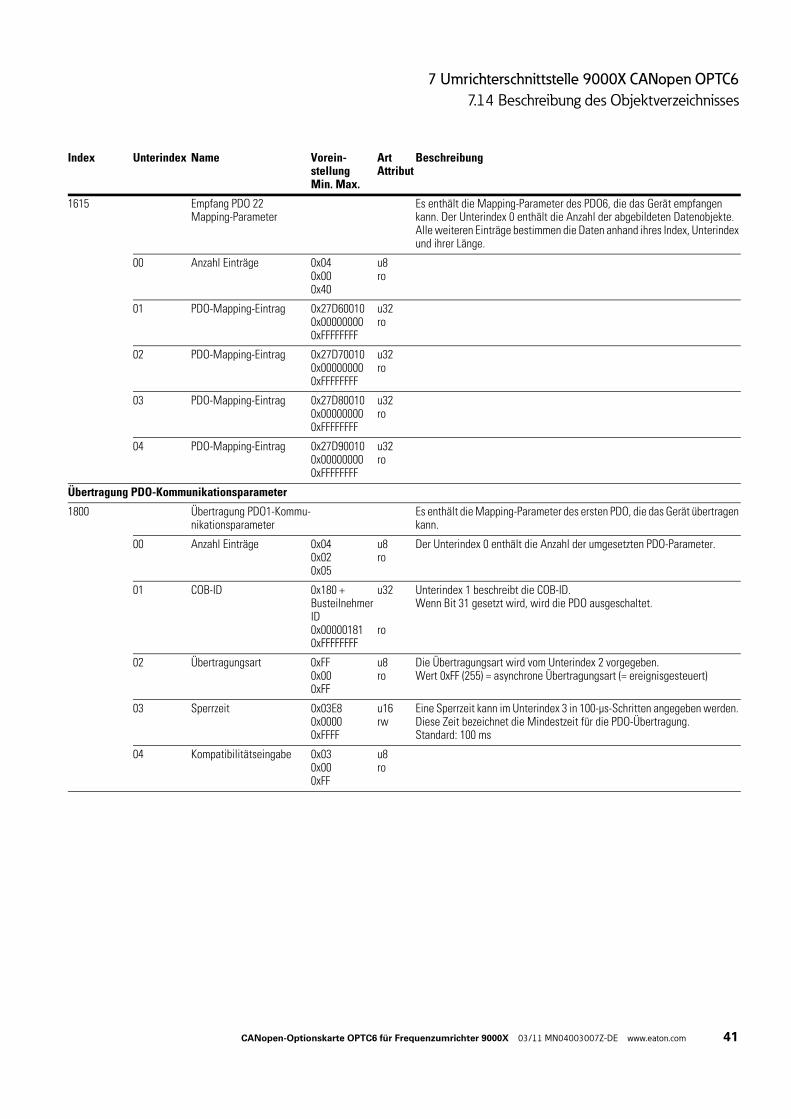
1615 Empfang PDO 22Mapping-Parameter
Es enthält die Mapping-Parameter des PDO6, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge.
00 Anzahl Einträge 0x04 0x000x40
u8 ro
01 PDO-Mapping-Eintrag 0x27D60010 0x00000000 0xFFFFFFFF
u32 ro
02 PDO-Mapping-Eintrag 0x27D70010 0x00000000 0xFFFFFFFF
u32 ro
03 PDO-Mapping-Eintrag 0x27D80010 0x00000000 0xFFFFFFFF
u32 ro
04 PDO-Mapping-Eintrag 0x27D90010 0x00000000 0xFFFFFFFF
u32 ro
Übertragung PDO-Kommunikationsparameter
1800 Übertragung PDO1-Kommu-nikationsparameter
Es enthält die Mapping-Parameter des ersten PDO, die das Gerät übertragen kann.
00 Anzahl Einträge 0x04 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x180 + Busteilnehmer ID 0x00000181 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird die PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x000xFF
u8 ro
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Wert 0xFF (255) = asynchrone Übertragungsart (= ereignisgesteuert)
03 Sperrzeit 0x03E80x0000 0xFFFF
u16rw
Eine Sperrzeit kann im Unterindex 3 in 100-μs-Schritten angegeben werden. Diese Zeit bezeichnet die Mindestzeit für die PDO-Übertragung.Standard: 100 ms
04 Kompatibilitätseingabe 0x030x000xFF
u8 ro
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 41
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
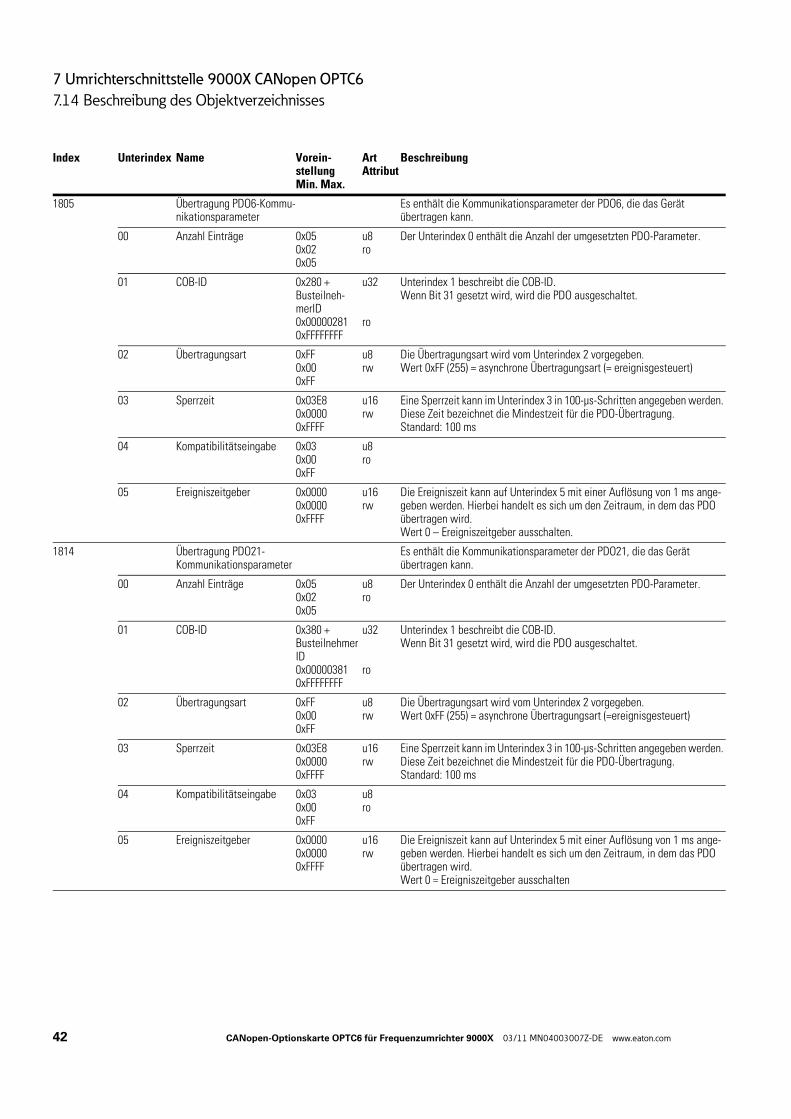
1805 Übertragung PDO6-Kommu-nikationsparameter
Es enthält die Kommunikationsparameter der PDO6, die das Gerätübertragen kann.
00 Anzahl Einträge 0x05 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x280 + Busteilneh-merID 0x00000281 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird die PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x000xFF
u8rw
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Wert 0xFF (255) = asynchrone Übertragungsart (= ereignisgesteuert)
03 Sperrzeit 0x03E80x0000 0xFFFF
u16rw
Eine Sperrzeit kann im Unterindex 3 in 100-μs-Schritten angegeben werden. Diese Zeit bezeichnet die Mindestzeit für die PDO-Übertragung.Standard: 100 ms
04 Kompatibilitätseingabe 0x030x000xFF
u8 ro
05 Ereigniszeitgeber 0x00000x00000xFFFF
u16rw
Die Ereigniszeit kann auf Unterindex 5 mit einer Auflösung von 1 ms ange-geben werden. Hierbei handelt es sich um den Zeitraum, in dem das PDO übertragen wird.Wert 0 – Ereigniszeitgeber ausschalten.
1814 Übertragung PDO21-Kommunikationsparameter
Es enthält die Kommunikationsparameter der PDO21, die das Gerät übertragen kann.
00 Anzahl Einträge 0x05 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x380 + Busteilnehmer ID 0x00000381 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird die PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x000xFF
u8rw
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Wert 0xFF (255) = asynchrone Übertragungsart (=ereignisgesteuert)
03 Sperrzeit 0x03E8 0x0000 0xFFFF
u16rw
Eine Sperrzeit kann im Unterindex 3 in 100-μs-Schritten angegeben werden. Diese Zeit bezeichnet die Mindestzeit für die PDO-Übertragung.Standard: 100 ms
04 Kompatibilitätseingabe 0x030x000xFF
u8 ro
05 Ereigniszeitgeber 0x00000x00000xFFFF
u16rw
Die Ereigniszeit kann auf Unterindex 5 mit einer Auflösung von 1 ms ange-geben werden. Hierbei handelt es sich um den Zeitraum, in dem das PDO übertragen wird.Wert 0 = Ereigniszeitgeber ausschalten
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
42 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
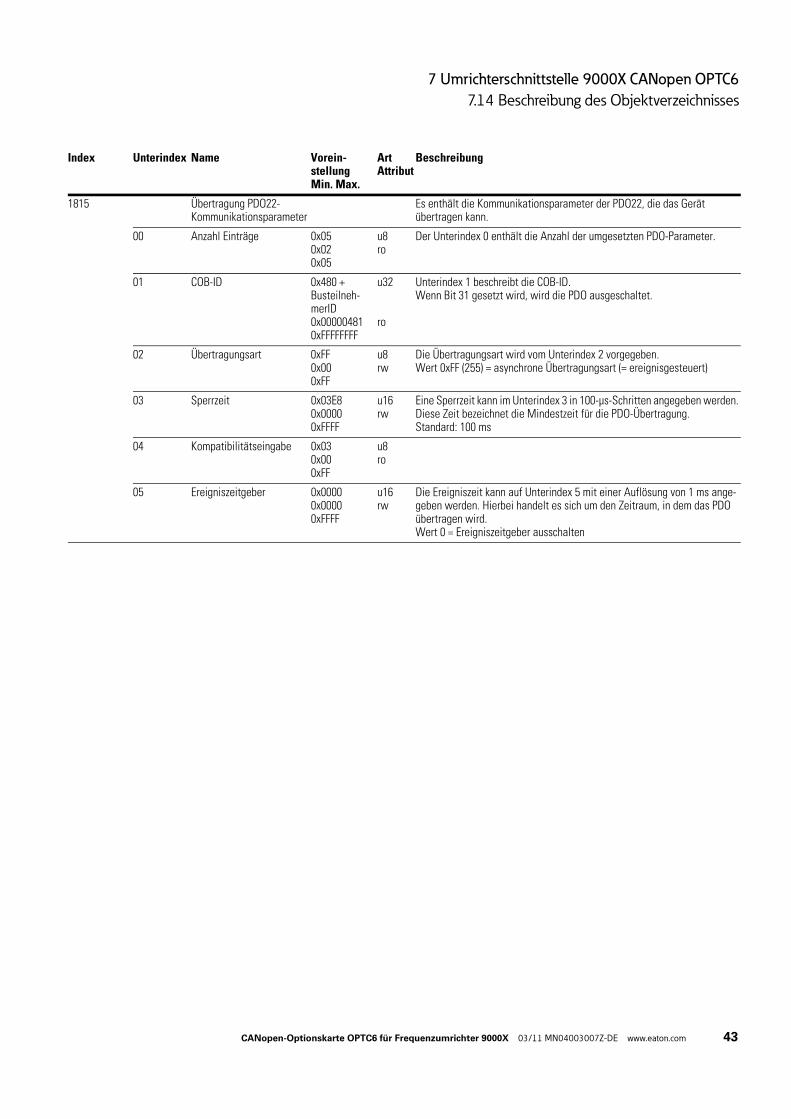
1815 Übertragung PDO22-Kommunikationsparameter
Es enthält die Kommunikationsparameter der PDO22, die das Gerät übertragen kann.
00 Anzahl Einträge 0x05 0x020x05
u8 ro
Der Unterindex 0 enthält die Anzahl der umgesetzten PDO-Parameter.
01 COB-ID 0x480 + Busteilneh-merID 0x00000481 0xFFFFFFFF
u32
ro
Unterindex 1 beschreibt die COB-ID.Wenn Bit 31 gesetzt wird, wird die PDO ausgeschaltet.
02 Übertragungsart 0xFF 0x000xFF
u8rw
Die Übertragungsart wird vom Unterindex 2 vorgegeben.Wert 0xFF (255) = asynchrone Übertragungsart (= ereignisgesteuert)
03 Sperrzeit 0x03E8 0x0000 0xFFFF
u16rw
Eine Sperrzeit kann im Unterindex 3 in 100-μs-Schritten angegeben werden. Diese Zeit bezeichnet die Mindestzeit für die PDO-Übertragung.Standard: 100 ms
04 Kompatibilitätseingabe 0x030x000xFF
u8 ro
05 Ereigniszeitgeber 0x00000x00000xFFFF
u16rw
Die Ereigniszeit kann auf Unterindex 5 mit einer Auflösung von 1 ms ange-geben werden. Hierbei handelt es sich um den Zeitraum, in dem das PDO übertragen wird.Wert 0 = Ereigniszeitgeber ausschalten
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 43
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
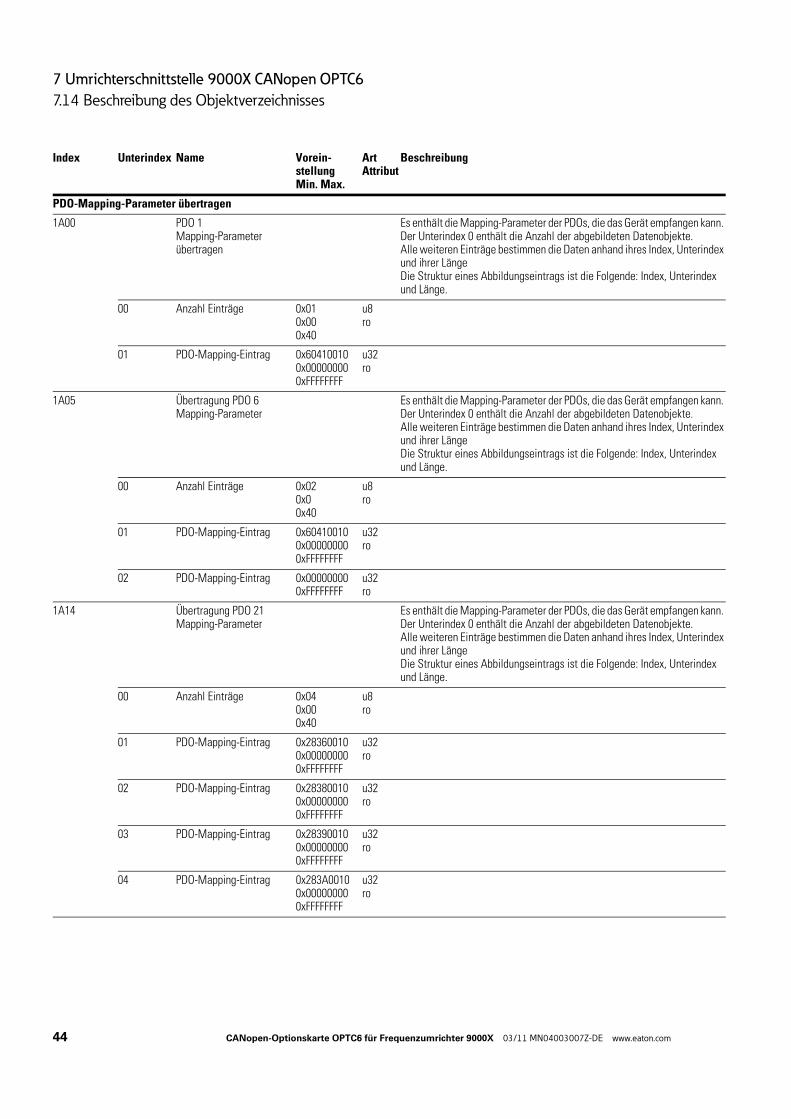
PDO-Mapping-Parameter übertragen
1A00 PDO 1Mapping-Parameterübertragen
Es enthält die Mapping-Parameter der PDOs, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge Die Struktur eines Abbildungseintrags ist die Folgende: Index, Unterindex und Länge.
00 Anzahl Einträge 0x01 0x00 0x40
u8 ro
01 PDO-Mapping-Eintrag 0x60410010 0x00000000 0xFFFFFFFF
u32 ro
1A05 Übertragung PDO 6Mapping-Parameter
Es enthält die Mapping-Parameter der PDOs, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge Die Struktur eines Abbildungseintrags ist die Folgende: Index, Unterindex und Länge.
00 Anzahl Einträge 0x02 0x0 0x40
u8 ro
01 PDO-Mapping-Eintrag 0x60410010 0x00000000 0xFFFFFFFF
u32 ro
02 PDO-Mapping-Eintrag 0x00000000 0xFFFFFFFF
u32 ro
1A14 Übertragung PDO 21Mapping-Parameter
Es enthält die Mapping-Parameter der PDOs, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge Die Struktur eines Abbildungseintrags ist die Folgende: Index, Unterindex und Länge.
00 Anzahl Einträge 0x04 0x00 0x40
u8 ro
01 PDO-Mapping-Eintrag 0x28360010 0x00000000 0xFFFFFFFF
u32 ro
02 PDO-Mapping-Eintrag 0x28380010 0x00000000 0xFFFFFFFF
u32 ro
03 PDO-Mapping-Eintrag 0x28390010 0x00000000 0xFFFFFFFF
u32 ro
04 PDO-Mapping-Eintrag 0x283A0010 0x00000000 0xFFFFFFFF
u32 ro
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
44 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
7 Umrichterschnittstelle 9000X CANopen OPTC6
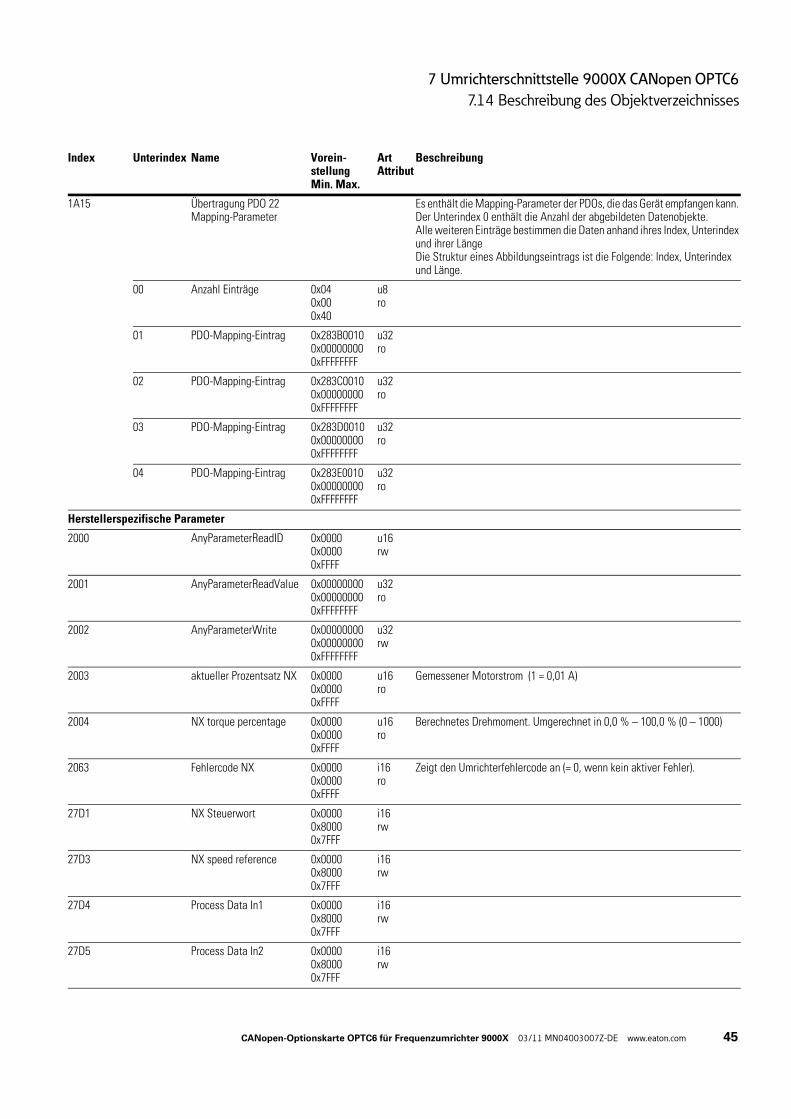
7.14 Beschreibung des Objektverzeichnisses
1A15 Übertragung PDO 22Mapping-Parameter
Es enthält die Mapping-Parameter der PDOs, die das Gerät empfangen kann. Der Unterindex 0 enthält die Anzahl der abgebildeten Datenobjekte.Alle weiteren Einträge bestimmen die Daten anhand ihres Index, Unterindex und ihrer Länge Die Struktur eines Abbildungseintrags ist die Folgende: Index, Unterindex und Länge.
00 Anzahl Einträge 0x04 0x000x40
u8 ro
01 PDO-Mapping-Eintrag 0x283B0010 0x00000000 0xFFFFFFFF
u32 ro
02 PDO-Mapping-Eintrag 0x283C0010 0x00000000 0xFFFFFFFF
u32 ro
03 PDO-Mapping-Eintrag 0x283D0010 0x00000000 0xFFFFFFFF
u32 ro
04 PDO-Mapping-Eintrag 0x283E0010 0x00000000 0xFFFFFFFF
u32 ro
Herstellerspezifische Parameter
2000 AnyParameterReadID 0x00000x0000 0xFFFF
u16rw
2001 AnyParameterReadValue 0x000000000x00000000 0xFFFFFFFF
u32 ro
2002 AnyParameterWrite 0x000000000x00000000 0xFFFFFFFF
u32rw
2003 aktueller Prozentsatz NX 0x00000x0000 0xFFFF
u16 ro
Gemessener Motorstrom (1 = 0,01 A)
2004 NX torque percentage 0x00000x0000 0xFFFF
u16 ro
Berechnetes Drehmoment. Umgerechnet in 0,0 % – 100,0 % (0 – 1000)
2063 Fehlercode NX 0x00000x0000 0xFFFF
i16 ro
Zeigt den Umrichterfehlercode an (= 0, wenn kein aktiver Fehler).
27D1 NX Steuerwort 0x00000x8000 0x7FFF
i16 rw
27D3 NX speed reference 0x00000x8000 0x7FFF
i16 rw
27D4 Process Data In1 0x00000x8000 0x7FFF
i16 rw
27D5 Process Data In2 0x00000x8000 0x7FFF
i16 rw
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 45
7 Umrichterschnittstelle 9000X CANopen OPTC6
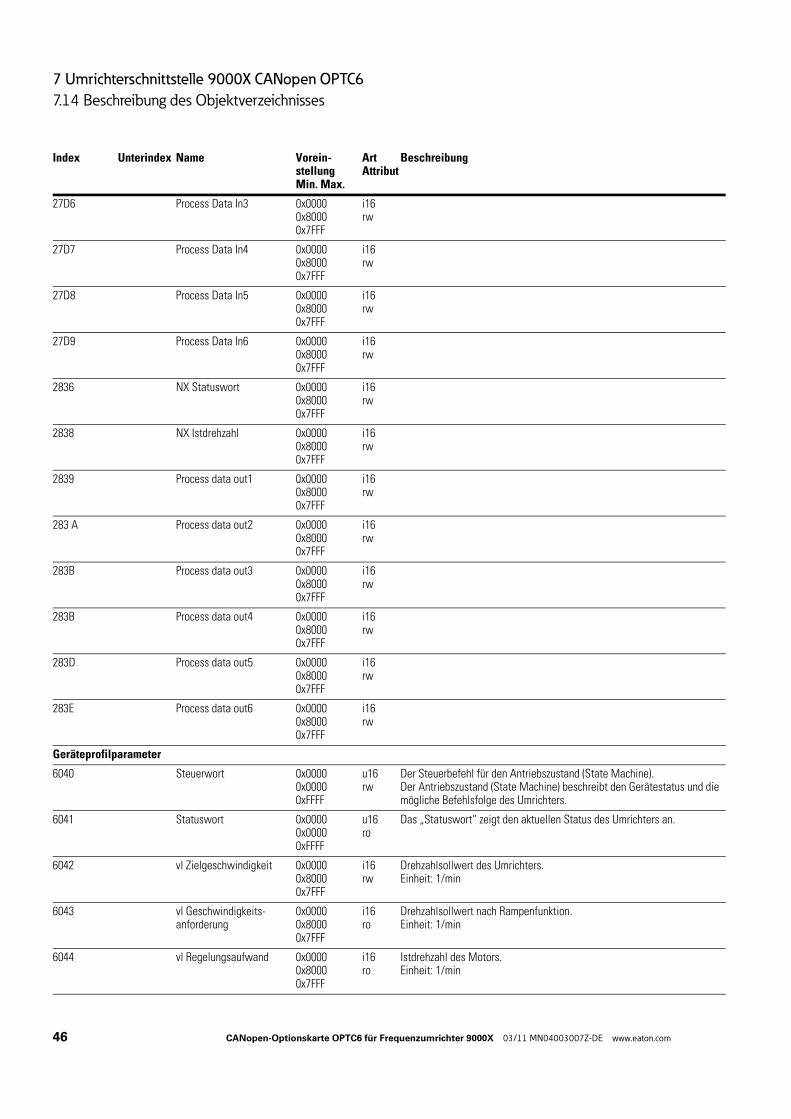
7.14 Beschreibung des Objektverzeichnisses
27D6 Process Data In3 0x00000x8000 0x7FFF
i16 rw
27D7 Process Data In4 0x00000x8000 0x7FFF
i16 rw
27D8 Process Data In5 0x00000x8000 0x7FFF
i16 rw
27D9 Process Data In6 0x00000x8000 0x7FFF
i16 rw
2836 NX Statuswort 0x00000x8000 0x7FFF
i16 rw
2838 NX Istdrehzahl 0x00000x8000 0x7FFF
i16 rw
2839 Process data out1 0x00000x8000 0x7FFF
i16 rw
283 A Process data out2 0x00000x8000 0x7FFF
i16 rw
283B Process data out3 0x00000x8000 0x7FFF
i16 rw
283B Process data out4 0x00000x8000 0x7FFF
i16 rw
283D Process data out5 0x00000x8000 0x7FFF
i16 rw
283E Process data out6 0x00000x8000 0x7FFF
i16 rw
Geräteprofilparameter
6040 Steuerwort 0x00000x00000xFFFF
u16rw
Der Steuerbefehl für den Antriebszustand (State Machine).Der Antriebszustand (State Machine) beschreibt den Gerätestatus und die mögliche Befehlsfolge des Umrichters.
6041 Statuswort 0x00000x00000xFFFF
u16 ro
Das „Statuswort“ zeigt den aktuellen Status des Umrichters an.
6042 vl Zielgeschwindigkeit 0x0000 0x8000 0x7FFF
i16rw
Drehzahlsollwert des Umrichters.Einheit: 1/min
6043 vl Geschwindigkeits-anforderung
0x00000x80000x7FFF
i16 ro
Drehzahlsollwert nach Rampenfunktion.Einheit: 1/min
6044 vl Regelungsaufwand 0x00000x80000x7FFF
i16 ro
Istdrehzahl des Motors.Einheit: 1/min
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
46 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
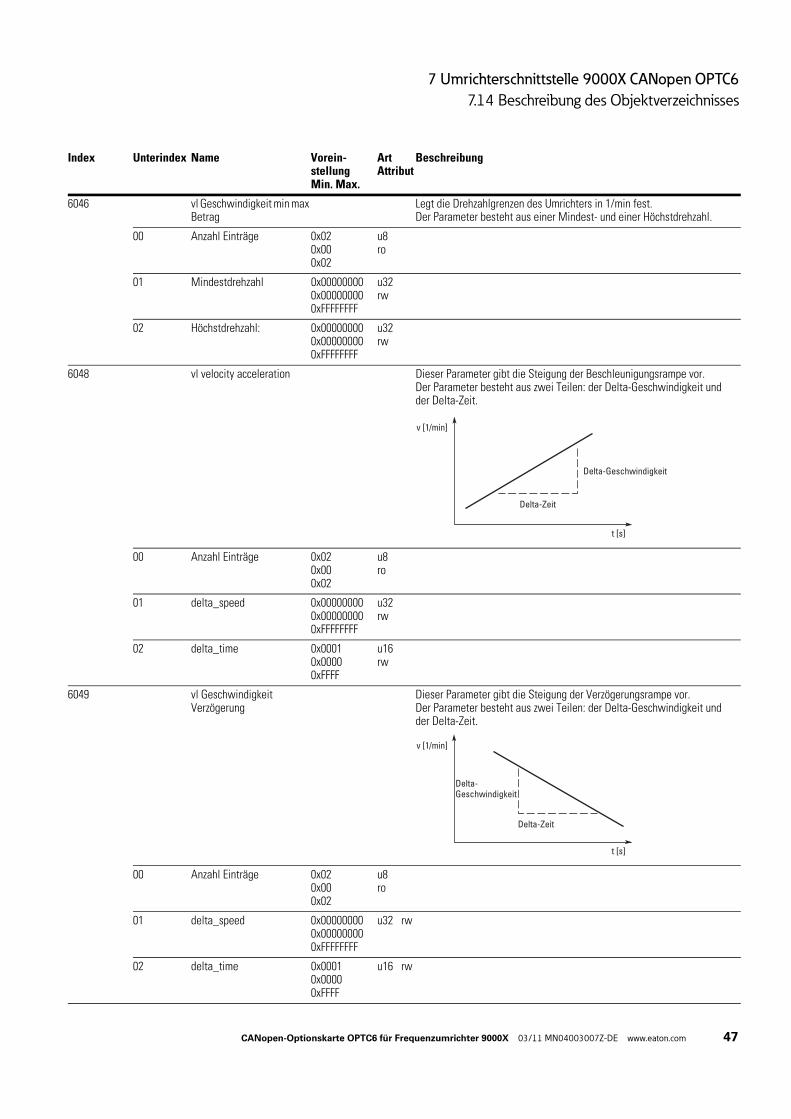
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
6046 vl Geschwindigkeit min max Betrag
Legt die Drehzahlgrenzen des Umrichters in 1/min fest.Der Parameter besteht aus einer Mindest- und einer Höchstdrehzahl.
00 Anzahl Einträge 0x020x000x02
u8 ro
01 Mindestdrehzahl 0x00000000 0x00000000 0xFFFFFFFF
u32rw
02 Höchstdrehzahl: 0x00000000 0x00000000 0xFFFFFFFF
u32rw
6048 vl velocity acceleration Dieser Parameter gibt die Steigung der Beschleunigungsrampe vor.Der Parameter besteht aus zwei Teilen: der Delta-Geschwindigkeit undder Delta-Zeit.
00 Anzahl Einträge 0x02 0x000x02
u8ro
01 delta_speed 0x000000000x00000000 0xFFFFFFFF
u32rw
02 delta_time 0x0001 0x0000 0xFFFF
u16rw
6049 vl GeschwindigkeitVerzögerung
Dieser Parameter gibt die Steigung der Verzögerungsrampe vor.Der Parameter besteht aus zwei Teilen: der Delta-Geschwindigkeit undder Delta-Zeit.
00 Anzahl Einträge 0x020x000x02
u8 ro
01 delta_speed 0x000000000x00000000 0xFFFFFFFF
u32 rw
02 delta_time 0x0001 0x0000 0xFFFF
u16 rw
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
Delta-Geschwindigkeit
Delta-Zeit
t [s]
v [1/min]
Delta-Geschwindigkeit
Delta-Zeit
t [s]
v [1/min]
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 47
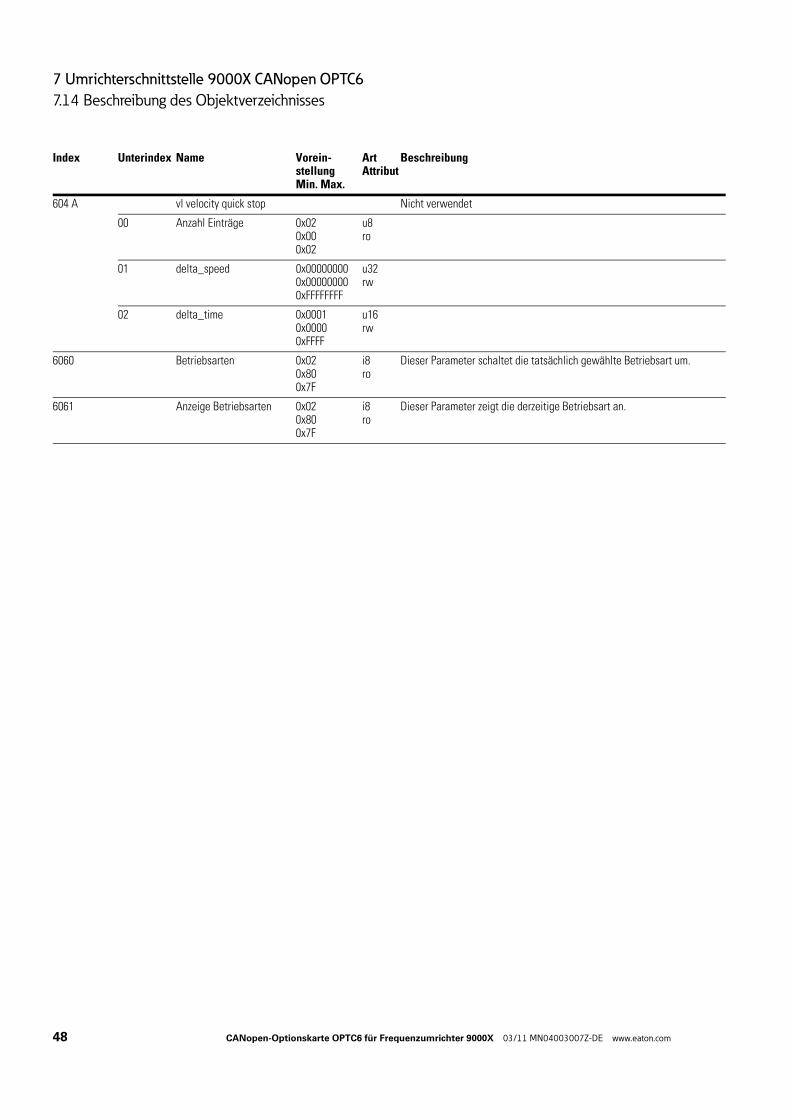
7 Umrichterschnittstelle 9000X CANopen OPTC6
7.14 Beschreibung des Objektverzeichnisses
604 A vl velocity quick stop Nicht verwendet
00 Anzahl Einträge 0x020x000x02
u8 ro
01 delta_speed 0x000000000x00000000 0xFFFFFFFF
u32rw
02 delta_time 0x0001 0x0000 0xFFFF
u16rw
6060 Betriebsarten 0x02 0x80 0x7F
i8 ro
Dieser Parameter schaltet die tatsächlich gewählte Betriebsart um.
6061 Anzeige Betriebsarten 0x02 0x80 0x7F
i8 ro
Dieser Parameter zeigt die derzeitige Betriebsart an.
Index Unterindex Name Vorein-stellung Min. Max.
Art Attribut
Beschreibung
48 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
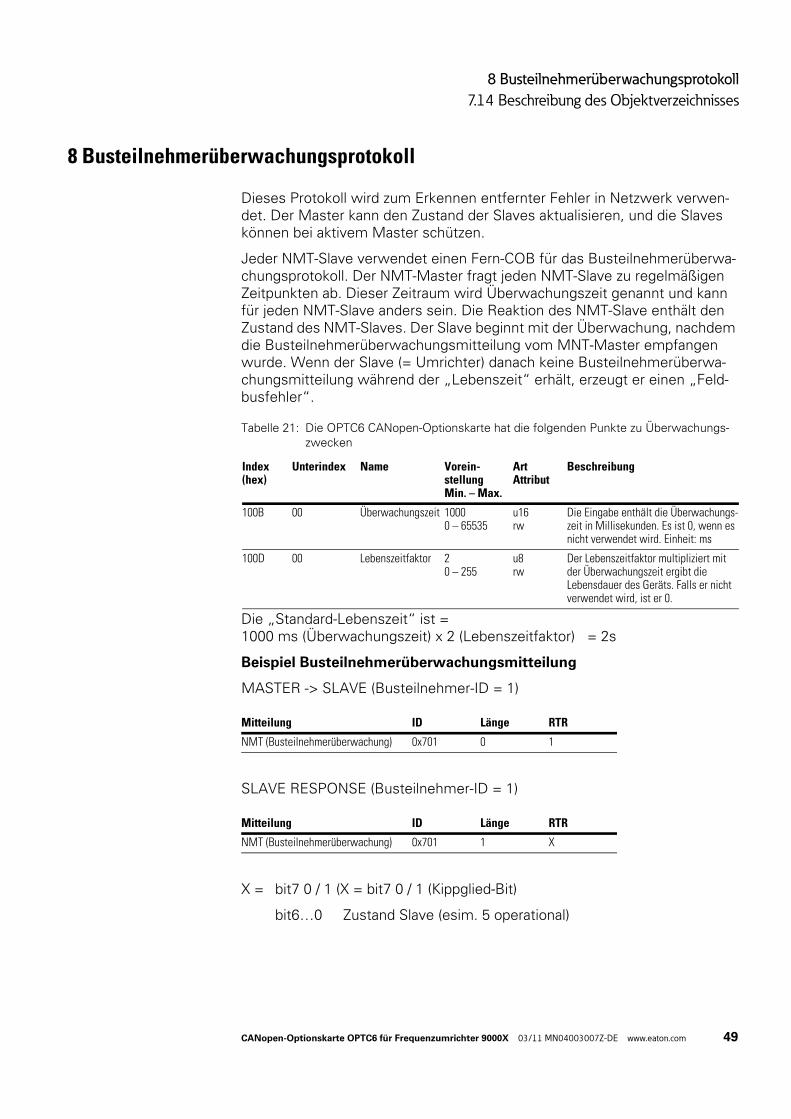
8 Busteilnehmerüberwachungsprotokoll
7.14 Beschreibung des Objektverzeichnisses
8 Busteilnehmerüberwachungsprotokoll
Dieses Protokoll wird zum Erkennen entfernter Fehler in Netzwerk verwen-det. Der Master kann den Zustand der Slaves aktualisieren, und die Slaves können bei aktivem Master schützen.
Jeder NMT-Slave verwendet einen Fern-COB für das Busteilnehmerüberwa-chungsprotokoll. Der NMT-Master fragt jeden NMT-Slave zu regelmäßigen Zeitpunkten ab. Dieser Zeitraum wird Überwachungszeit genannt und kann für jeden NMT-Slave anders sein. Die Reaktion des NMT-Slave enthält den Zustand des NMT-Slaves. Der Slave beginnt mit der Überwachung, nachdem die Busteilnehmerüberwachungsmitteilung vom MNT-Master empfangen wurde. Wenn der Slave (= Umrichter) danach keine Busteilnehmerüberwa-chungsmitteilung während der „Lebenszeit“ erhält, erzeugt er einen „Feld-busfehler“.
Tabelle 21: Die OPTC6 CANopen-Optionskarte hat die folgenden Punkte zu Überwachungs-zwecken
Die „Standard-Lebenszeit“ ist =1000 ms (Überwachungszeit) x 2 (Lebenszeitfaktor) = 2s
Beispiel Busteilnehmerüberwachungsmitteilung
MASTER -> SLAVE (Busteilnehmer-ID = 1)
SLAVE RESPONSE (Busteilnehmer-ID = 1)
X = bit7 0 / 1 (X = bit7 0 / 1 (Kippglied-Bit)
bit6…0 Zustand Slave (esim. 5 operational)
Index (hex)
Unterindex Name Vorein-stellungMin. – Max.
ArtAttribut
Beschreibung
100B 00 Überwachungszeit 10000 – 65535
u16 rw
Die Eingabe enthält die Überwachungs-zeit in Millisekunden. Es ist 0, wenn es nicht verwendet wird. Einheit: ms
100D 00 Lebenszeitfaktor 20 – 255
u8 rw
Der Lebenszeitfaktor multipliziert mit der Überwachungszeit ergibt die Lebensdauer des Geräts. Falls er nicht verwendet wird, ist er 0.
Mitteilung ID Länge RTR
NMT (Busteilnehmerüberwachung) 0x701 0 1
Mitteilung ID Länge RTR
NMT (Busteilnehmerüberwachung) 0x701 1 X
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 49
8 Busteilnehmerüberwachungsprotokoll
8.1 Elektronisches Datenblatt, EDS-Datei
8.1 Elektronisches Datenblatt, EDS-DateiDer Einsatz von Geräten in einem Kommunikationsnetzwerk erfordert die Konfigurierung der Geräteparameter und Kommunikationsanlagen. CANopen gibt einen standardisieren Weg zu diesen Parametern über das Objektver-zeichnis vor.
Die Komplexität der CANopen-Systeme erfordert Softwaretools für den Umgang mit derselben. Dadurch wird die Komplexität von Planung, Ausle-gung und Analysenverfahren verringert und die Sicherheit des Systems maßgeblich erhöht.
Zu diesem Zweck benötigen die Softwaretools eine elektronische Beschrei-bung der CANopen-Geräte. Damit herstellerunabhängige Tools eingesetzt werden können, wird in diesem Dokument ein standardisiertes Dateiformat festgelegt – elektronisches Datenblatt (EDS) – genannt.
Die EDS-Datei für die CANopen-Optionskarte OPTC6 befindet sich auf der Eaton Website.
50 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
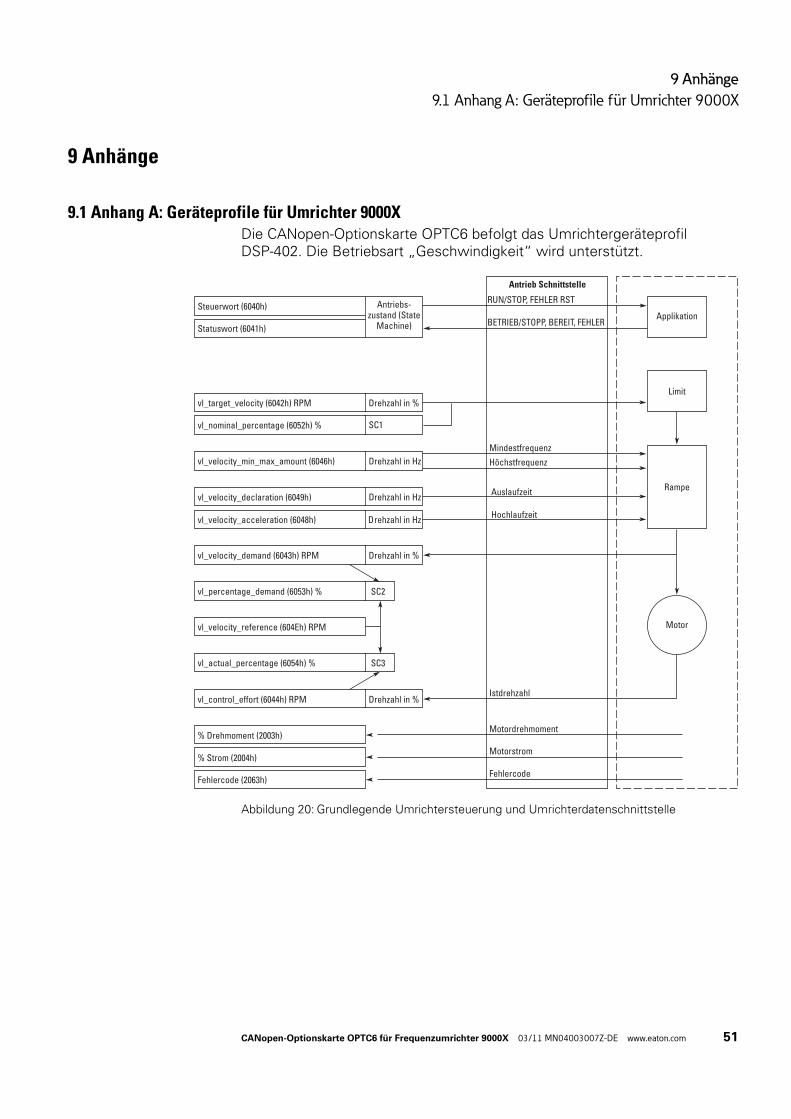
9 Anhänge
9.1 Anhang A: Geräteprofile für Umrichter 9000X
9 Anhänge
9.1 Anhang A: Geräteprofile für Umrichter 9000X Die CANopen-Optionskarte OPTC6 befolgt das Umrichtergeräteprofil DSP-402. Die Betriebsart „Geschwindigkeit“ wird unterstützt.
Abbildung 20: Grundlegende Umrichtersteuerung und Umrichterdatenschnittstelle
Antrieb Schnittstelle
RUN/STOP, FEHLER RSTSteuerwort (6040h) Antriebs-
zustand (StateMachine)Statuswort (6041h)
Applikation
Rampe
Motor
Limit
vl_target_velocity (6042h) RPM
BETRIEB/STOPP, BEREIT, FEHLER
Höchstfrequenz
vl_nominal_percentage (6052h) %
Drehzahl in %
SC1
vl_velocity_declaration (6049h)
vl_velocity_acceleration (6048h) Drehzahl in Hz
vl_velocity_min_max_amount (6046h)
% Drehmoment (2003h)
% Strom (2004h)
Fehlercode (2063h)
Drehzahl in Hz
Mindestfrequenz
Drehzahl in Hz
Istdrehzahl
vl_velocity_demand (6043h) RPM Drehzahl in %
vl_percentage_demand (6053h) % SC2
vl_velocity_reference (604Eh) RPM
Motordrehmoment
vl_actual_percentage (6054h) % SC3
vl_control_effort (6044h) RPM Drehzahl in %
Motorstrom
Fehlercode
Auslaufzeit
Hochlaufzeit
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 51
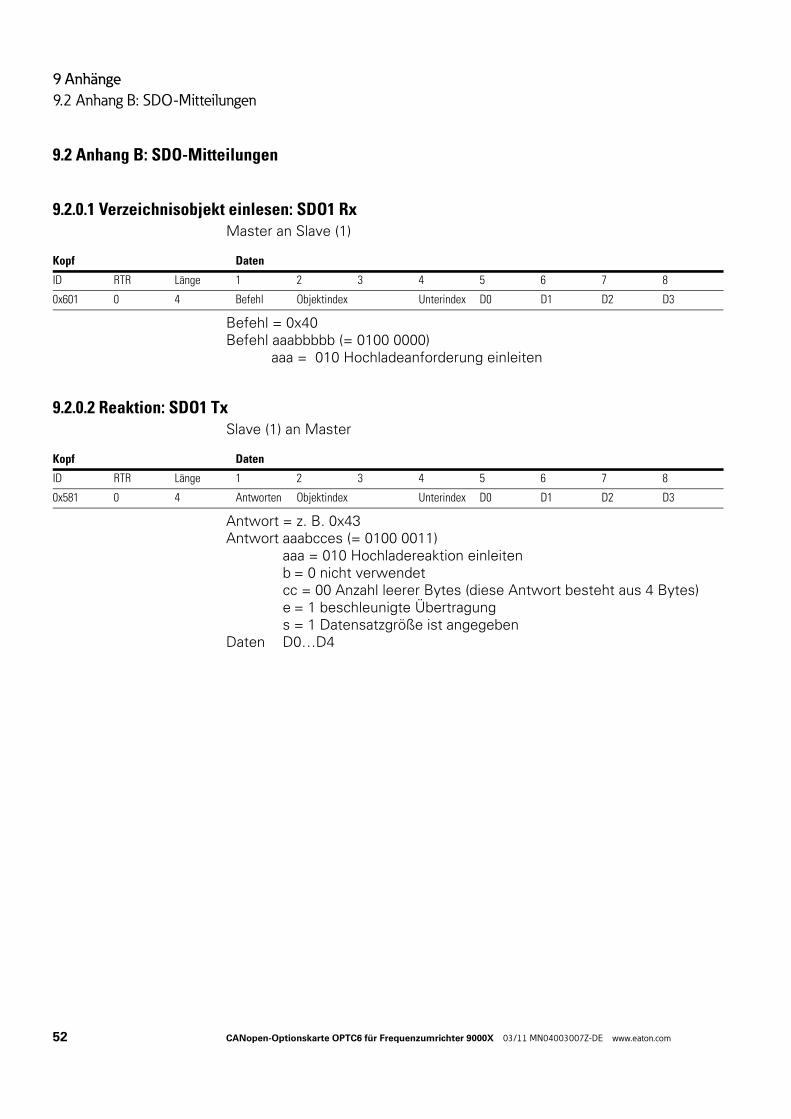
9 Anhänge
9.2 Anhang B: SDO-Mitteilungen
9.2 Anhang B: SDO-Mitteilungen
9.2.0.1 Verzeichnisobjekt einlesen: SDO1 RxMaster an Slave (1)
Befehl = 0x40 Befehl aaabbbbb (= 0100 0000)
aaa = 010 Hochladeanforderung einleiten
9.2.0.2 Reaktion: SDO1 TxSlave (1) an Master
Antwort = z. B. 0x43 Antwort aaabcces (= 0100 0011)
aaa = 010 Hochladereaktion einleitenb = 0 nicht verwendetcc = 00 Anzahl leerer Bytes (diese Antwort besteht aus 4 Bytes)e = 1 beschleunigte Übertragungs = 1 Datensatzgröße ist angegeben
Daten D0…D4
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x601 0 4 Befehl Objektindex Unterindex D0 D1 D2 D3
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x581 0 4 Antworten Objektindex Unterindex D0 D1 D2 D3
52 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
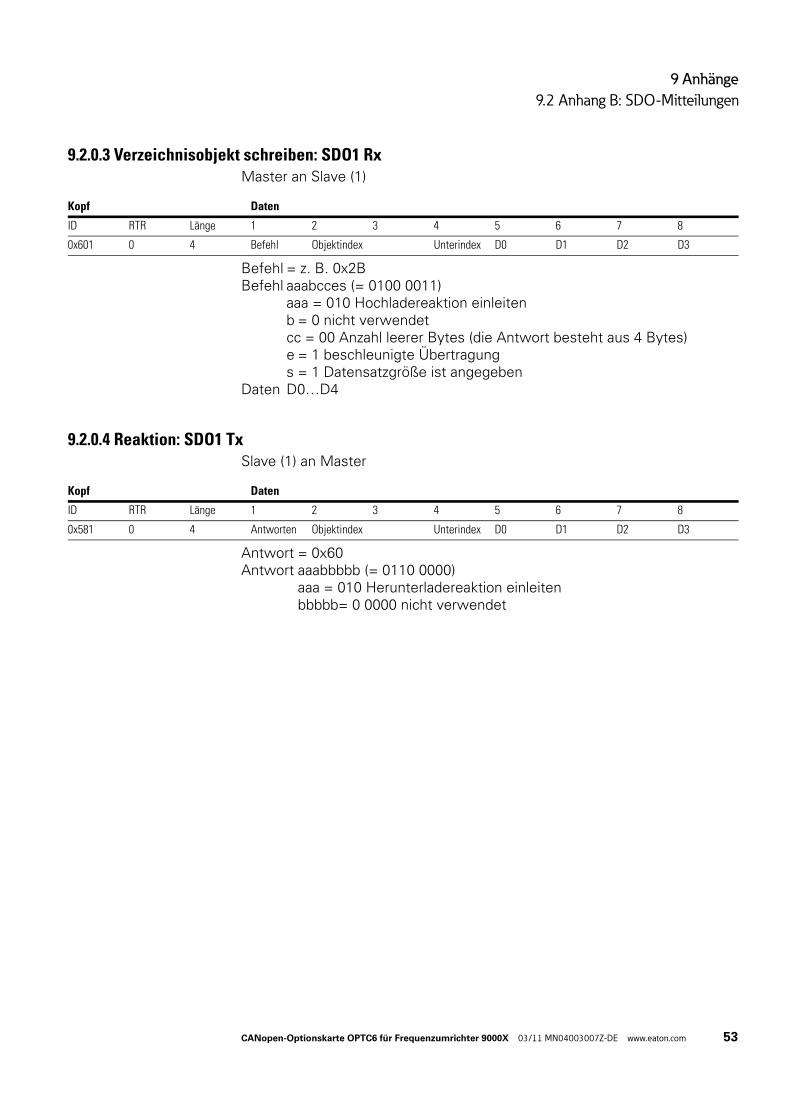
9 Anhänge
9.2 Anhang B: SDO-Mitteilungen
9.2.0.3 Verzeichnisobjekt schreiben: SDO1 RxMaster an Slave (1)
Befehl = z. B. 0x2B Befehl aaabcces (= 0100 0011)
aaa = 010 Hochladereaktion einleitenb = 0 nicht verwendetcc = 00 Anzahl leerer Bytes (die Antwort besteht aus 4 Bytes)e = 1 beschleunigte Übertragungs = 1 Datensatzgröße ist angegeben
Daten D0…D4
9.2.0.4 Reaktion: SDO1 TxSlave (1) an Master
Antwort = 0x60 Antwort aaabbbbb (= 0110 0000)
aaa = 010 Herunterladereaktion einleitenbbbbb= 0 0000 nicht verwendet
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x601 0 4 Befehl Objektindex Unterindex D0 D1 D2 D3
Kopf Daten
ID RTR Länge 1 2 3 4 5 6 7 8
0x581 0 4 Antworten Objektindex Unterindex D0 D1 D2 D3
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 53
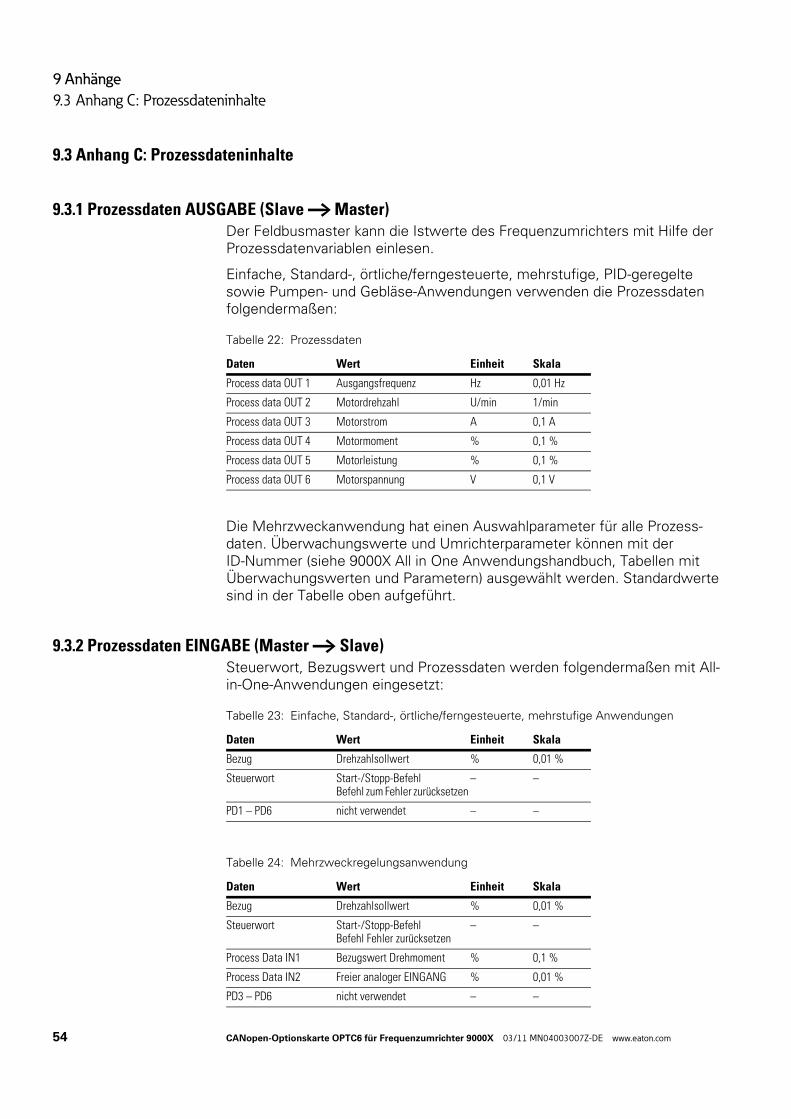
9 Anhänge
9.3 Anhang C: Prozessdateninhalte
9.3 Anhang C: Prozessdateninhalte
9.3.1 Prozessdaten AUSGABE (Slave → Master)Der Feldbusmaster kann die Istwerte des Frequenzumrichters mit Hilfe der Prozessdatenvariablen einlesen.
Einfache, Standard-, örtliche/ferngesteuerte, mehrstufige, PID-geregelte sowie Pumpen- und Gebläse-Anwendungen verwenden die Prozessdaten folgendermaßen:
Tabelle 22: Prozessdaten
Die Mehrzweckanwendung hat einen Auswahlparameter für alle Prozess-daten. Überwachungswerte und Umrichterparameter können mit der ID-Nummer (siehe 9000X All in One Anwendungshandbuch, Tabellen mit Überwachungswerten und Parametern) ausgewählt werden. Standardwerte sind in der Tabelle oben aufgeführt.
9.3.2 Prozessdaten EINGABE (Master → Slave)Steuerwort, Bezugswert und Prozessdaten werden folgendermaßen mit All-in-One-Anwendungen eingesetzt:
Tabelle 23: Einfache, Standard-, örtliche/ferngesteuerte, mehrstufige Anwendungen
Tabelle 24: Mehrzweckregelungsanwendung
Daten Wert Einheit Skala
Process data OUT 1 Ausgangsfrequenz Hz 0,01 Hz
Process data OUT 2 Motordrehzahl U/min 1/min
Process data OUT 3 Motorstrom A 0,1 A
Process data OUT 4 Motormoment % 0,1 %
Process data OUT 5 Motorleistung % 0,1 %
Process data OUT 6 Motorspannung V 0,1 V
Daten Wert Einheit Skala
Bezug Drehzahlsollwert % 0,01 %
Steuerwort Start-/Stopp-BefehlBefehl zum Fehler zurücksetzen
– –
PD1 – PD6 nicht verwendet – –
Daten Wert Einheit Skala
Bezug Drehzahlsollwert % 0,01 %
Steuerwort Start-/Stopp-Befehl Befehl Fehler zurücksetzen
– –
Process Data IN1 Bezugswert Drehmoment % 0,1 %
Process Data IN2 Freier analoger EINGANG % 0,01 %
PD3 – PD6 nicht verwendet – –
54 CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com
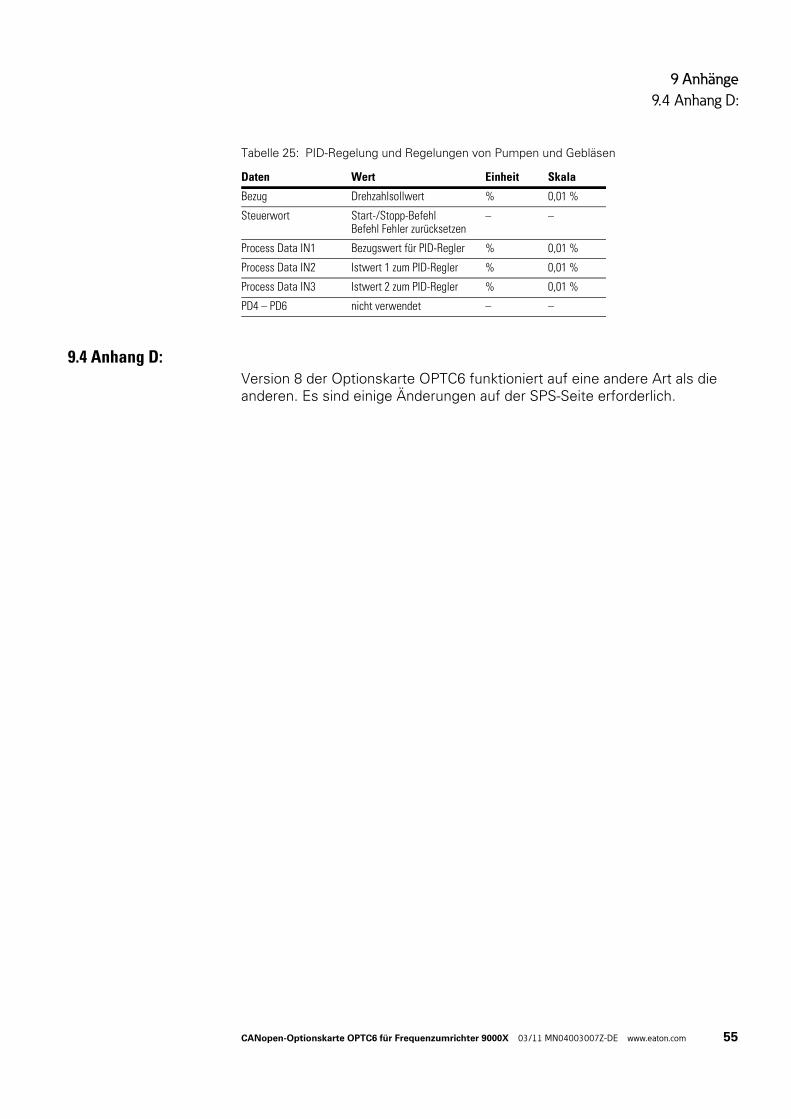
9 Anhänge
9.4 Anhang D:
Tabelle 25: PID-Regelung und Regelungen von Pumpen und Gebläsen
9.4 Anhang D:Version 8 der Optionskarte OPTC6 funktioniert auf eine andere Art als die anderen. Es sind einige Änderungen auf der SPS-Seite erforderlich.
Daten Wert Einheit Skala
Bezug Drehzahlsollwert % 0,01 %
Steuerwort Start-/Stopp-Befehl Befehl Fehler zurücksetzen
– –
Process Data IN1 Bezugswert für PID-Regler % 0,01 %
Process Data IN2 Istwert 1 zum PID-Regler % 0,01 %
Process Data IN3 Istwert 2 zum PID-Regler % 0,01 %
PD4 – PD6 nicht verwendet – –
CANopen-Optionskarte OPTC6 für Frequenzumrichter 9000X 03/11 MN04003007Z-DE www.eaton.com 55





























