Embed Size (px)
Citation preview

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -1-
Capítulo 3
Trabajos Virtuales
3.1- Principio de los trabajos virtuales
En el curso de estática se utiliza el Principio de los Trabajos Virtuales (P.T.V) como una forma
alternativa de plantear ecuaciones de equilibrio y determinar el valor de alguna fuerza o
solicitación incógnita. También se lo aplica al estudio de líneas de influencia de reacciones o
solicitaciones en sistemas isostáticos.
“Resulta condición necesaria y suficiente para que un sistema esté en equilibrio que el
trabajo virtual de las fuerzas exteriores (T.V.E.) sea igual al trabajo virtual de las
fuerzas interiores (T.V.I.) para cualquier desplazamiento virtual”. Este principio, que aparentemente no agrega información desconocida, resulta no obstante, muy
útil por sus importantes aplicaciones.
Definiciones:
Desplazamiento virtual: desplazamiento compatible con sus vínculos externos y con las
condiciones de continuidad internas del sistema estructural. Ejemplos se ilustran en la Figura 3.1.

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -2-
Figura 3.1
Los desplazamientos virtuales se aplican sobre el sistema independientemente de los materiales
que lo constituyen, por lo que para generar un desplazamiento virtual no es necesario vencer la
rigidez o elasticidad del material. Por lo tanto, un desplazamiento virtual no está “necesaria-
mente” asociado a ninguna fuerza o conjunto de fuerzas que lo produzca.
Notación:
: Como prefijo de una variable, significa que se trata de un valor virtual de la variable cuyo
nombre figura después de esa letra.
:eW Es el trabajo virtual de las fuerzas exteriores (en general, fuerzas y momentos).
: iW Es el trabajo virtual de las esfuerzos (normal, cortante, flexional y torsional).
El Principio de Trabajos Virtuales se expresa con la siguiente expresión:
e iW W (Ec. 3.1)
En el caso general se tendrá:
2u
1u

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -3-
0 0 0 0
. . . . . . . .l l l l
i tW N dx M dx M dx Q dx (Ec. 3.2)
Llamando iN a un esfuerzo genérico , , , tN M Q M y i a la distorsión especifica asociada al
mismo, se tiene:
. . . i iP u N dx (Ec. 3.3)
En el caso de fuerzas distribuidas, el primer miembro contendrá integrales.
Cabe aclarar que las distorsiones virtuales i no son causadas por las solicitaciones
reales iN . Tampoco es indispensable asociar los desplazamientos virtuales a algún
sistema de esfuerzos virtuales iN .
Se destaca además que (Ec. 3.3) es totalmente general y vale para cualquier material
ya que las distorsiones virtuales i son completamente arbitrarias. No es necesario
asociar a las deformaciones virtuales un sistema de cargas o esfuerzos internos. La
expresión (Ec. 3.3) es válida tanto para desplazamientos virtuales pequeños como
grandes; siempre que para grandes desplazamientos se tenga en cuenta que el
equilibrio se establece en el sistema deformado y se calculan correctamente los iN .
La expresión (Ec. 3.3) equivale a decir que “para todo sistema en equilibrio el trabajo virtual de
las fuerzas exteriores es igual al trabajo virtual interno”. Téngase presente que la expresión
(Ec. 3.3) se obtuvo generalizando el concepto de trabajo virtual de fuerzas actuando sobre
partículas que resulta independiente del concepto de energía interna asociada a un medio
continuo elástico.
Resulta conveniente destacar que en el caso de energía interna, las deformaciones son
causadas por los esfuerzos N , mientras que en trabajos virtuales las deformaciones son
arbitrarias y no están asociadas necesariamente a fuerzas u otras causas. Debe notarse que en las
expresiones del trabajo virtual no figura el valor 1 2 como en el caso de energía interna porque
el desplazamiento virtual (y por lo tanto i y iu ) ocurre después que las fuerzas iP ya estaban
actuando, y consecuentemente los esfuerzos iN ya tienen su valor final.

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -4-
Verificación del Principio de Trabajos Virtuales
Ejemplo (1): Sea el caso de una viga simplemente apoyada cuya única carga externa es
un momento BM aplicado en el extremo “B”.
Figura 3.2
Se impone arbitrariamente un desplazamiento virtual a partir de la posición deformada de la viga
en la forma:
0.. xy senl
(Ec. 3.4)
0
.. .cosd y x
dx l l
0.B x l l
0. . .e i i BW P u Ml
0. .e BW Ml (Ec. 3.5)
BM
.x BxM Ml
y
y
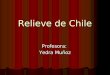
Convención de signos de la elastica
( )q ( )Q ( ) ( )M ( ) ( )M
y
( )y
.dQ q dx .dM Q dx .d dx .dy dxdydx
ddx

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -5-
La curvatura virtual se obtiene derivando dos veces la elástica virtual:
2 2
02 2
.. .d y xsen
dx l l
(Ec. 3.6)
0 0
( ). ( ) . ( ). ( ).l l
idW M x x dx M x x dxdx
2
00 2
0 0
. . . .. . . . . . . .l
i B Bx x x x xW M sen dx M sen dl l l l l l l
Recordando que: 0 0
. . .cosx sen x dx sen x x x
Se tiene:
0. .i BW Ml (Ec. 3.7)
De modo que se verifica que el T.V.E. es igual al T.V.I.:
e iW W (Ec. 3.8)
Para que sea válida la (Ec. 3.8) se deben cumplir dos condiciones:
1º) El equilibrio de fuerzas: Las fuerzas externas , ,A A BM R R están en equilibrio y las fuerzas
internas ( ), ( )M x Q x cumplen con las condiciones de equilibrio interno.
2º) El desplazamiento virtual es compatible (no hay quiebres en la elástica virtual).
3.2 Distintas formas de utilizar el principio de trabajos virtuales
El P.T.V. puede utilizarse para formular ecuaciones de equilibrio, pero este modo de aplicar el
P.T.V., muy útil en el curso de Estática, resulta poco interesante al estudiar cuerpos deformables
y problemas hiperestáticos.
El P.T.V. relaciona tres aspectos:
I) Fuerzas en equilibrio
II) Desplazamientos virtuales compatibles
III) T.V.E. = T.V.I.
Siempre que se cumplan dos de estos tres aspectos, el restante se cumple también.
En el ejemplo (1), se vio que partiendo de I) fuerzas en equilibrio, II) desplazamientos
compatibles, se puede verificar que . . . . . .T V E T V I [(Ec. 3.8)]

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -6-
Se tratará ahora una forma de utilizar el P.T.V. que resulta sumamente útil en este curso para su
aplicación en cuerpos deformables.
Si a la ecuación de T.V. . . . . . .T V E T V I se le agregan las condiciones de equilibrio, se puede obtener de la ecuación de T.V. un desplazamiento desconocido. Este procedimiento es simplemente una aplicación práctica del P.T.V. que establece que las
fuerzas están en equilibrio, y a partir de esa condición se obtiene el desplazamiento buscado.
3.3. Cálculo de desplazamientos por aplicación del principio de T.V. Ejemplo (2): Calcular el giro B en el extremo “B” de la viga simplemente apoyada de
la Figura 3.3 con carga uniforme " "q .
Figura 3.3
Se concentra la atención en un sistema auxiliar (B) (Figura 3.4) que tiene como única carga
externa un momento en el extremo “B” de la viga de valor unitario 1BM .
B
2.( ) . .2 2
q l xM x x q
.( ) .2
q lQ x q x

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -7-
Figura 3.4
1) El sistema auxiliar (B) está en equilibrio (porque los esfuerzos M y Q se han determinado
de modo de satisfacer equilibrio).
2) Se impone un desplazamiento virtual al sistema auxiliar (B) que es el “desplazamiento del
sistema real”. Este desplazamiento es compatible con los vínculos por lo que estos no realizan
trabajo, y además es compatible con la continuidad interna de la viga.
Se adoptan como deformaciones virtuales las correspondientes al sistema real, que dependen de
los esfuerzos internos a través de las ecuaciones constitutivas del material supuesto lineal y
elástico.
Para materiales linealmente elásticos (que responden a la ley de Hooke) se tiene:
.ME I
; .c
QA G
(Ec. 3.9)
3) Planteando la ecuación de T.V.:
e iW W
0 0
1. . . . .. .
l l
Bc
M QM dx Q dxE I A G
(Ec. 3.10)
Como los valores del segundo miembro son conocidos, se puede determinar la única incógnita
“ B ”.
2
0 0
. .. . .1 12 2 2. . . . .. .
l l
Bc
q l x q lx q q xx dx dx
l E I l A G
(Ec. 3.11)
Debe considerarse la conveniencia de utilizar un estado auxiliar con una única carga externa, de
modo que se evalúe una única incógnita.
B
y
M
Q
1( ) .M x xl
1l
1

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -8-
Resulta fundamental que el sistema sea isostático porque de esa manera se puede garantizar
equilibrio simplemente calculando los esfuerzos M y M con las ecuaciones de la estática.
En esta forma de aplicar el P.T.V., en lugar de proponer una elástica y luego derivar para obtener
las distorsiones , , , , se propone como elástica virtual para el estado auxiliar (b), a la
elástica real del sistema (a), y se calculan las deformaciones virtuales por expresiones del tipo
(Ec. 3.9).
Este último ejemplo se ilustra a través de un ejemplo práctico. Para calcular una componente del
desplazamiento de un punto se procede de la siguiente manera:
1) Se determinan los diagramas de esfuerzos internos para el estado de cargas reales.
2) Se define un estado auxiliar en una estructura igual a la dada, pero con una única carga
unitaria colocada en el punto cuyo desplazamiento se busca, y aplicada en la dirección de la
componente deseada del mismo.
3) Se determinan los esfuerzos internos para el estado auxiliar.
4) Se calcula el desplazamiento por la expresión:
. . . . . . . .. . . .
tt
c p
MM Q NM dx Q dx M dx N dxE I A G G I A E
(Ec. 3.12)
Resulta importante reconocer que este método permite calcular sólo una componente del
desplazamiento de un solo punto por vez. Por lo tanto se deben plantear tantos estados auxiliares
como componentes de desplazamiento se deseen calcular. El primer paso no necesita repetirse.
Ejemplo (3): Calcular la componente horizontal del desplazamiento del punto “C” de
la torre reticulada de la Figura 3.5 .
Figura 3.5
.jN
A El
jN
HC

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -9-
Construimos un sistema auxiliar con una fuerza unitaria con la dirección del desplazamiento del
sistema real que nos interesa determinar, y planteamos la ecuación de T.V.
1
1. .n
HC j j
jN e
(Ec. 3.13)
Las elongaciones je son las deformaciones del sistema real que según la ley de Hooke son:
.j
jj
j
Ne
A El
(Ec. 3.14)
Finalmente:
1
..
nH
C jj
j
NNA El
(Ec. 3.15)
La expresión (Ec. 3.13) vale para cualquier material mientras que la expresión (Ec. 3.14) vale
sólo para materiales linealmente elásticos.
El desplazamiento virtual no debe necesariamente ser pequeño. En la aplicación práctica del
P.T.V. se emplean como virtuales a las deformaciones reales que, en muchos casos son
pequeños. La hipótesis (generalmente aplicable) de que las deformaciones son pequeñas, permite
calcular los esfuerzos en el estado indeformado: en la mayoría de los casos esto es una buena
aproximación, a menos que exista una tendencia al pandeo.
Para determinar los jN se determinan las fuerzas en las barras suponiendo que éstas actúan
paralelas al eje de las barras en la estructura sin deformar. Los cálculos necesarios para emplear
(Ec. 3.15) se suelen ordenar en una tabla como sigue:
Barra
Nº jl jA
.j
j
A El
jN jN ..j
j
NNA E
l
1
2
n

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -10-
Cálculo de desplazamientos relativos
Ejemplo (4): Calcular la componente en la dirección DE del desplazamiento relativo
entre los puntos D y E, en el reticulado de la Figura 3.5.
Figura 3.6
..E j E
j
NNA El
; ..D j D
j
NNA E
l
El desplazamiento relativo ED se obtiene como suma de los desplazamientos de E y D, E y
D .
1 1
. .. .
n n
ED E D j jE Dj j
j j
N NN NA E A El l
(Ec. 3.16)
1
..
n
ED j jE Dj
j
NN NA El
(Ec. 3.17)
La (Ec. 3.17) sugiere que en lugar de utilizar dos sistemas auxiliares con dos análisis
independientes, se utilice un único estado auxiliar como el de la Figura 3.7.a.
j EN j D
N
jN

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -11-
Figura 3.7
Esto trae aparejado una ventaja operativa ya que el sistema de cargas de la Figura 3.7.a es
autoequilibrado (no requiere reacciones exteriores), y las únicas barras con esfuerzos son las
correspondientes al marco cerrado de la Figura 3.7.b.
En consecuencia la sumatoria de la expresión (Ec. 3.17) se extiende sólo a esas cinco barras.
Ejemplo (5): Calcular el giro de la barra CG de la Figura 3.8 (este cálculo es de interés
en caso de llevar montada, por ejemplo, una antena de telecomunicaciones).
Figura 3.8
Se utiliza un sistema auxiliar consistente en dos fuerzas unitarias perpendiculares a la dirección
de la barra considerada, que permiten calcular la componente del desplazamiento relativo entre
los extremos de la barra en la dirección normal a la misma.
jN jN
j j jE DN N N

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -12-
( )1
..
n
CG normal jj
j
NNA El
(Ec. 3.18)
El giro (en radianes) se obtiene dividiendo por la longitud de la barra CG (aproximadamente
aceptable cuando el ángulo es pequeño, entonces es prácticamente igual a su tangente)
( )CG normalCG
CGl
(Ec. 3.19)
Si este valor resulta positivo, se asocia el sentido de las fuerzas unitarias en la Figura 3.8.b, y se
concluye que el giro es antihorario.
Desplazamientos por defectos de montaje en reticulados isostáticos
Si en un reticulado isostático las barras no tienen exactamente la longitud teórica, el reticulado se
puede montar de todos modos sin introducir tensiones en las barras, pero la estructura presenta
deformaciones iniciales y la forma real del reticulado no coincide con la teórica.
Figura 3.9
Para determinar la forma real, se procede a dibujar la estructura de la siguiente manera:
El punto “B” se encuentra sobre la horizontal de A considerando el largo real de la barra 1. El
punto E’ se obtiene haciendo centro con el compás en B’ con la longitud real de 4, y trazando un
arco, haciendo centro en A, y con una abertura de compás igual al largo de la barra 3, se
intersecta al arco anterior en E’ (posición real del punto E). Luego se determina por el mismo
procedimiento el punto F’, luego H’, etc.
jejN

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -13-
En realidad, para trazar el diagrama deformado y a escala existen diversos métodos gráficos. El
procedimiento del compás es sólo para visualizar que la estructura puede montarse sin problemas
aunque las barras tengan defectos de longitud (siempre que la estructura sea isostática).
Como ejercicio se sugiere determinar a mano alzada la posición deformada para el caso en que
todas las barras de la Figura 3.9 tienen la longitud teórica excepto la barra 11 que resulta corta.
Ejemplo (6): Calcular el corrimiento horizontal del punto “C” respecto a la
configuración teórica en el reticulado de la Figura 3.9.a.
I) Se calculan los esfuerzos jN en el sistema auxiliar que tiene la forma teórica debidos a una
carga unitaria horizontal en C.
II) Se aplica sobre el sistema auxiliar (en equilibrio) una deformada virtual que es la
correspondiente a la estructura real (Figura 3.9.b).
Las elongaciones del sistema real son los errores en la longitud de las barras je . Una barra larga
presenta una elongación del mismo signo que el alargamiento por tracción que es positivo.
Luego:
j
j
Barra larga e es positivoBarra corta e es negativo
(Ec. 3.20)
je reemplaza a los alargamientos .
j
NA E
l
Se aplica la ecuación de T.V.:
1
.n
HC j j
jN e
(Ec. 3.21)
Desplazamientos por variaciones térmicas en reticulados isostáticos
Si alguna o todas las barras de un reticulado isostático experimentan una variación de temperatura j
t respecto a la temperatura de montaje, el mismo se reacomoda cambiando su forma, pero sin introducir tensiones en las barras.
Para calcular el desplazamiento de un nudo del reticulado se procede igual que en el caso anterior, teniendo presente que una dilatación térmica causado por un 0t es equivalente a la elongación de una barra traccionada, que es positiva:
. .te t l (Ec. 3.22)

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -14-
Donde es el coeficiente de dilatación térmica.
tt positivo elongación e positiva
La componente horizontal del desplazamiento del nudo “C” resulta:
1
.n
HC j t j
jN e
(Ec. 3.23)
Finalmente, en el caso general de considerar simultáneamente cargas, cambios térmicos y
defectos de montaje, se superponen los efectos, y considerando las expresiones (Ec. 3.15), (Ec.
3.21) y (Ec. 3.23) se obtiene:
1
. . ..
nH
C jj
j
NN e t lA El
(Ec. 3.24)
Recuérdese que jN corresponde al sistema auxiliar de la carga unitaria mientras que el
paréntesis contiene las elongaciones virtuales que son las de la estructura real.
Desplazamientos por variaciones térmicas en sistemas isostáticos de alma llena
Se supone que el cambio de temperatura es pequeño, de modo que no cambian las propiedades
del material, y que la variación de temperatura en la altura de la viga es lineal.
La dilatación térmica que sufren las fibras superiores e inferiores de un tramo de viga de longitud
dx es según la ecuación (Ec. 3.22):
Figura 3.10
st
itdx
2h
h'' . .sDD t dx
'' . .iCC t dx
d
. .it dx
. .st dx

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -15-
La sección plana CD se ha desplazado una distancia dl hasta la posición D’C’ y luego ha rotado
un ángulo d para llegar a la posición final C’’D’’.
. . . .2
s im
t tdl dx t dx
La deformación específica por cambio de temperatura resulta:
.t mt (Ec. 3.25)
El ángulo girado se puede aproximar por la tangente:
. . . .''' '' '' '' . .s is i
t dx t dxD D DD CCd t t dxh h h h
De modo que la curvatura térmica t es: tddx
.t s it th (Ec. 3.26)
Para considerar el efecto térmico sobre los desplazamientos basta tener en cuenta en la estructura
real las deformaciones térmicas, dadas por (Ec. 3.25) y (Ec. 3.26). El resto del cálculo es el
mismo de los casos anteriores. Es importante aclarar que la (Ec. 3.26) sólo proporciona el “valor
absoluto” de la curvatura térmica, debiendo definirse su signo de acuerdo a la convención de
signos adoptada.
Ejemplo (7): Calcular el desplazamiento horizontal del punto C de la estructura de
Figura 3.11 producido por un aumento de temperatura 0t en la fibra inferior del
tramo AB.
Figura 3.11
t
t
2l

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -16-
2
0 0
21
. . 1 . . . . . .2 4 2
l l
t tx t l tdx dx l
h
(Ec. 3.27)
El desplazamiento se compone de dos términos: el primero se debe a la rotación del punto “A”
por la curvatura en el tramo AB, y el segundo, a la dilatación del tramo AB (ver Figura 3.12)
Figura 3.12
3.4 - Teorema de reciprocidad para sólidos linealmente elásticos
Como corolario del principio de Trabajos Virtuales aplicado a sólidos linealmente elásticos se
puede demostrar el Teorema de Reciprocidad que resulta muy útil desde el punto de vista
conceptual y práctico.
Se demostrará este teorema para el caso de una viga simple. Supongase un estado (I) provocado
por las cargas 1 2, ,.....,I I InP P P para el cual se ha determinado el estado de solicitaciones, y otro
estado (II) provocado por las cargas 1 2, ,.....,II II IImP P P .
Se aplica la ecuación de T.V. para el estado (I) tomando como desplazamiento virtual el
provocado por las fuerzas del estado (II).
I II1IP 2
IP IiP I
nP
i j
Ij
IM
1IIP II
jP IImP
i j
IIi
IIM
A
1
2
'C

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -17-
1. . . . .
nI II I II I II
i ii
Trabajo Trabajode deFuerzas FuerzasExternas Internas
P M dx Q dx
(Ec. 3.28)
Nótese que los desplazamientos IIi son causados por las cargas II
jP pero se refieren al lugar
donde se aplican las cargas IiP .
Recíprocamente se puede plantear:
1. . . . .
mII I II I II I
j jj
P M dx Q dx
(Ec. 3.29)
Suponiendo proporcionalidad entre tensión y deformaciones:
1 ..
I IME I
1 ..
I I
c
QA G
1 ..
II IIME I
1 ..
II II
c
QA G
Reemplazando estas expresiones en (Ec. 3.28) y (Ec. 3.29), y restando miembro a miembro se
tiene:
1 1
. .n m
I II II Ii i j j
i jP P
(Ec. 3.30)
El teorema de reciprocidad se sintetiza en la expresión (Ec. 3.30) que expresa que el trabajo de
las fuerzas del estado (I) a través de los desplazamientos de sus puntos de aplicación en el estado
(II), es igual al trabajo de las fuerzas del estado (II) a través de los desplazamientos en el estado
(I). Este resultado puede generalizarse. Designando KN a una solicitación , , , ,tM M Q N etc y
K a su deformación específica asociada , , , ,etc , las expresiones (Ec. 3.28) y (Ec. 3.29)
adquieren la siguiente forma:
1
. . .n
I II I IIi i K K
i KP N dx
(Ec. 3.31)
1
. . .n
II I II Ij j K K
j KP N dx
(Ec. 3.32)
Las condiciones de linealidad expresan: .I IK K KN ; .II II
K K KN
Por lo tanto:

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -18-
1 1
. .n m
I II II Ii i j j
i jP P
Es importante destacar que el teorema de reciprocidad vale sólo para sólidos lineales
mientras que el principio de Trabajos Virtuales vale aún en el caso No Lineal. En el
caso No Lineal, (Ec. 3.31) mantiene vigencia pero IIK puede ser bastante complicado.
Entre las aplicaciones del teorema de reciprocidad para sólidos linealmente elásticos se destacan
dos:
1) Probar la simetría de la Matriz de Flexibilidad en el método de las fuerzas y de la
matriz de Rigidez en el método de los desplazamientos.
2) Trazado de líneas de influencia de reacciones y solicitaciones en sistemas
hiperestáticos y de deformaciones en sistemas isostáticos e hiperestáticos. Por reciprocidad se puede afirmar que el giro en el extremo de una viga simple (en radianes)
causado por una carga de 1 N actuando en el centro es numéricamente igual al descenso del
centro de la viga (en metros) causado por un momento de 1 N.m actuando en el extremo.
1. 1.A C
A C (Ec. 3.33)
Como ejercicio el lector puede calcular por separado A y C , y comparar.
Ejercicio N°1:
Determinar el corrimiento de los nudos B, C y D y trazar la deformada para un
aumento uniforme de temperatura.
A
C
I
II

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -19-
200ºt C ; 6 111 10 .º C
200 3 3
0. . 2, 2 10 0,667. 2, 2 10 0,667 200 0, 293
BVD tA
N dx dx cm
3 32, 2 10 1,33 200 2,2 10 1 250 1,135HD cm
32, 2 10 0,0067 200 0,0029 [ ] ( )B rad horario
32, 2 10 1 200 0, 44VB cm
t( )
.t t
6 111 10 . 200ºt C
32, 2 10t
( )
t
VD
( )H
D( )
( )
B HB V
B( ) ( ) ( )

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -20-
32,2 10 ( 1,33) 200 0,585HB cm
Notar que el efecto térmico no produce esfuerzos en este sistema isostático. Se dilatan libremente
los tramos vertical y horizontal produciéndose un giro del conjunto de valor B y hay también un
desplazamiento del apoyo “C” hacia la derecha.
Se deja al lector verificar que el giro de cualquier sección es B .
Ejercicio N° 2:
Determinar el máximo descenso del punto B que puede producir una carga P aplicada
en C sin producir fluencia (E = 2.1 x 106 kg/cm2 para toda la estructura)
Tubo diámetro exterior: 15 cm ; espesor: 0,50 cm ; 23000fkg
cm
Tensor Diámetro: 2 cm ; 24000fkg
cm
B
B

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -21-
Tensor:
22. 3,14
4tDA cm
2,83.3,14 f
N PA
4440P kg
Tubo:
2 2 2. 22,7774
A D d cm
4 4 4. 599,3164
I D d cm
60. 2,57.599,31 22,78
7,5
B fM N P PW A
3473P kg
El factor limitante es la tensión por flexión compuesta en el punto B del tubo.
Cálculo del desplazamiento máximo:
( )
( )

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -22-
300 331,6
0 0
8930 9582. . . . .2,143. .2,365.. . 47830748 6597344
B BVB A D
N NN dx N dx dx dxA E A E
0,120 1,137 1, 257VB cm
12VB mm
Nota: Obsérvese que la flexión del tubo no contribuye al descenso del punto B, y que el 90% del
descenso se debe al alargamiento del tensor.
Se puede verificar que el descenso del punto C es de 27mm y el 43% del mismo proviene de la
flexión del tubo.
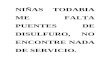
Ejercicio N° 3:
Determinar el descenso del nudo central del cordón inferior y el desplazamiento del
apoyo móvil causado por el peso propio del reticulado de acero. 2
1 2 3 4 5 6 8A A A A A A cm
27 8 9 10 4A A A A cm
211 12 13 6A A A cm
37,8 grcm
( )
( )
( )
( )2,143 N

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -23-
Considérese que la mitad del peso de las barras que concurren a cada nudo debe ser aplicada a
dicho nudo. La característica de los nudos C, F, y G sumado a la simetría del sistema permite
simplificar los cálculos considerando la mitad de la estructura (peso de cada barra: P = volumen
x peso específico).
Se confecciona una tabla para calcular los desplazamientos requeridos en forma ordenada.
BN
EvN
N
62.48 62.48

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -24-
Nº
Barra
Área
[cm²]
Largo
[cm]
Peso
[kg]
.A El
[kg/cm²]
N
[kg] EvN BN
.. EvN N
A El
[cm]
.. BN N
A El
[cm]
1 8 233,24 14.55 72029 -101,25 -0,972 --- 0,00137 ---
2 8 200 12,48 84000 -119,23 -1,667 --- 0,00237 ---
3 8 200 12,48 84000 -119,23 -1,667 --- 0,00237 ---
4 8 233,24 14,55 72029 -101,25 -0,972 --- 0,00137 ---
5 8 233,24 14,55 72029 37,79 0,972 --- 0,00051 ---
6 8 233,24 14,55 72029 37,79 0,972 --- 0,00051 ---
7 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
8 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
9 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
10 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
11 6 120 5,62 105000 9,05 --- --- --- ---
12 6 120 5,62 105000 -15,29 --- --- --- ---
13 6 120 5,62 105000 9,05 --- --- --- ---
0,01538 0,00827
. 0,015.
VE Ev
N N cmA E
l
. 0,008.B BN N cm
A El
Ejercicio N° 4:
Calcular el descenso del extremo C del caño debido al peso propio y al peso del agua
del mismo. Diámetro interno: 2 pulgadas
Espesor: 3/16 de pulgadas
Despreciar deformación por corte.
622,1 10 kgE
cm ; 5
28,4 10 kgGcm

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -25-
4 4 4 4 4. . 6,03 5,08 32,31664 64
I D d cm
4 4 4. 64,63232
J D d cm
Peso total por cada centímetro del caño:
2 2 2 2 3. . 1 . . 6,03 5,08 1 .7,8 10 0,06474 4c
kgq V D dcm
2 2 3. . 1 . .5,08 1 .1 10 0,02034 4a
kgq V dcm
0,0647 0,0203 0,085c akgq q qcm
tMtM
6,00 pies
3,00 pies
SecciónTubo

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -26-
( )
lcm
.RigidezE I
.M
kg cm
M Contrib. al
desplazamiento
Flexión en AB 182,4 67863600 27,8. 0,0425.x x 1.x 0,40579
Flexión en CB 91,2 67863600 20,0425.x 1.x 0,01083
Torsión en AB 182,4 54290880 353,5 91,2 0,10831
0,52493
2 2182,4 91,2 182,4
0 0 0
7,8. 0,0425. 0,0425. 353,5.1. . .1. . .91, 2.67863600 67863600 54290880x x xx dx x dx dx
0,52cm
Ejercicio N° 5:
a) Calcular el desplazamiento del punto central del tramo de la viga que tiene una
carga P en el extremo C y sufre una disminución de la temperatura t en la parte
inferior del tramo AB.
b) Determinar la incidencia que tendría un apoyo elástico de constante K colocado en
el apoyo B.
0t

CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________PRATO, MASSA -27-
a) Despreciando las deformaciones por corte frente a las producidas por flexión:
2.
0 0
0,50. 0,50.. . . .0,50. . . . .. . . 2
l l lVD t t tl
M P P xM dx x x dx x l dxE I E I E I
3 2. .. 2
VD t
P l lE I
Se puede llegar al mismo resultado calculando por separado el desplazamiento producido por la
carga y el producido por la variación térmica y luego superponiendo los resultados.
b) Para tener en cuenta el apoyo elástico basta con agregar la energía almacenada en el resorte
durante el desplazamiento virtual en el estado inicial.
* . ..
V V V BD D D B
RN N RA E K
l
Nótese que el asentamiento bb
RK
permite un giro de cuerpo rígido a la viga y el punto central
tendría un descenso 1.2b por estar en el centro del tramo. Justamente se tiene que 1
2bR .
( ) 0,50. .M x P x
.ME I
.t
th
M
Tramo AD
Tramo DB
0,50.M x
0,50. 1.( )2xM x x l l