Embed Size (px)
Citation preview

Carrier Phase Ionospheric Gradient GroundMonitor for GBAS with Experimental Validation
SAMER KHANAFSEHIllinois Institute of Technology
SAM PULLENStanford University
JOHN WARBURTONWilliam J. Hughes FAA Technical Center
Received May 2011; Revised August 2011
ABSTRACT: This paper describes a Ground Based Augmentation System (GBAS) ground-based monitor capable ofinstantly detecting anomalous ionospheric gradients. Themonitor utilizes differential carrier phasemeasurements acrossmultiple reference station baselines as the basis for detection. Performance analysis shows that the monitor is highly sen-sitive to the quality of the carrier phasemeasurements. Therefore, data collected from aGBASprototype ground facility isused to quantify the measurement quality and validate the concept monitor. Copyright# 2012 Institute of Navigation.
INTRODUCTION
The Federal Aviation Administration (FAA) hassponsored two programs to augment GPS for civilaviation applications: the Wide Area AugmentationSystem (WAAS), which is referred to internationallyas a Space Based Augmentation System (SBAS), andthe Local Area Augmentation System (LAAS), com-monly referred to as a Ground Based AugmentationSystem (GBAS). GBAS is a safety-critical system thatis intended to support all close-proximity flightprocedures including landing, departure, and surfaceoperations at an airport. The main advantages ofGBAS, relative to the existing Instrument LandingSystem (ILS), are its ability to support multiple typesof approaches and its ability to support operations atseveral runways simultaneously with a single GroundFacility (GF). Because of its versatility, GBAS is envi-sioned to replace ILS, which is currently being usedfor final approach and landing phases of flight. EachGF will include multiple, spatially separated GPSreceivers utilizing Low Multipath Antennas (LMAs).The primary reasons for the use of multiple referencereceivers and antennas at the GF are to provide ameans for detection and isolation of a failed receiverand also to allow for a net reduction in ranging errorby averaging measurements for a given satellite.
However, a generally unrecognized benefit of suchantenna separation is that differential carrier phasemeasurements across the baselines can be usedto detect and isolate certain signal-in-space (SIS)failures and anomalies that are hazardous to GBAS.Examples of such SIS failures are ephemerisanomalies and ionospheric fronts. In this work, wewill focus on ionospheric front detection andmitigation.The ionosphere is a region of ionized gases that
extend from 50km to about 1000km above Earth’ssurface. When the GPS radio signal travels throughthis region a change occurs in its speed and direction(usually referred to as refraction), which has a directimpact on the calculation of user-to-satellite range.Because of the dispersive nature of the ionosphere,GPS code and carrier measurements are affecteddifferently: the ionosphere delays the code phasesignal and advances the carrier phase signal by thesame amount. This phenomenon is commonlyreferred to as code-carrier divergence. The state ofthe ionosphere changes over a given day and nightand is also highly influenced by solar activity,such as solar storms and geomagnetic disturbances.Nominal spatial and temporal variations in theionospheric delays are accounted for in GBAS anddo not pose a threat. However, unusual behaviorduring ionospheric storms may result in large spatialgradients of up to 400mm/km in slant ionosphericdelay (meaning 400mm slant error in the
NAVIGATION: Journal of The Institute of NavigationVol. 59, No. 1, Spring 2012Printed in the U.S.A.
51

measurement per one kilometer of distance betweentwo antennas), which are referred to as ionosphericfronts [1–4]. Such fronts have been observed in 2000and 2003 and are detailed in [1–4]. For an approachingaircraft using GBAS, gradients this large couldcause vertical position errors of up to 20m [4]. Moredetails about the hazardous impact of sharp iono-spheric fronts on GBAS navigation are discussed in [4].At the GF, existing monitors use code-carrier
divergence to help detect ionospheric fronts [5].Another type of monitor which uses triple differencecarrier phase measurements for fault detection isdescribed in [6]. The major disadvantage of thesemonitors is that they require a time history ofmeasurements and cannot detect ionospheric frontspresent at satellite acquisition (i.e., the first time thesatellite is used). In other words, if a newly acquiredsatellite is affected by an ionospheric front, such amonitor will not be able to detect it. Subsequentmonitor performance may also be affected due to thepresence of the front at the commencement ofmonitoring. In this case, it is necessary for ground-based fault detection to rely on instantaneous GFmeasurements directly.First, this paper will tackle the issue of instanta-
neously detecting ionospheric fronts. We will beginby considering a monitor capable of instantaneouslydetecting ionospheric fronts using double differencecarrier phase measurements. The performance ofthis monitor is quantified as a function of ionosphericfront gradient, baseline length, and carrier phasemeasurement quality. Due to the high sensitivity ofmonitor performance on carrier phase measurementquality, data validation is presented and discussed.Finally, improvements to the monitor performancevia calibration of the LMA antenna phase centervariation are discussed.
IONOSPHERIC FRONT MONITOR CONCEPT
The concept explained herein is based on the workin [7]. A very effective method toward detecting iono-spheric fronts instantaneously is to use doubledifference carrier phase measurements between theknown LMA baselines to directly observe the effectof the ionospheric anomalies. This method utilizesdifferences in baseline lengths to cover different iono-spheric front gradient magnitudes. Under nominalconditions (fault free), a simplified version of thesingle difference (two reference station antennasconstructing a baseline xb) carrier phase measure-ment can be written as,
Δf ¼ eT xb þ Δtþ lΔnþ ΔbI þ eΔf (1)
where,Δf the single difference carrier phase measurement
vector
e user-satellite unit line of sight vectorxb baseline vector between the two antennas,Δt differential receiver clock biasl carrier phase wavelengthΔn single difference ambiguityΔbI differential ionospheric error between the antennas
(baseline), andeΔf the single difference carrier phase measurement
noise.Under nominal ionospheric conditions, if the
baseline length is relatively short (less than a kilo-meter), ΔbI will be on the order of millimeters andusually can be neglected. If an ionospheric frontexists, the ionospheric front gradient will be signif-icant and might cause an erroneous position esti-mate due to substantial ΔbI. For simplicity, theionospheric front is modeled as a slant gradienta connecting two zones. Note that since a isexpressed as a slant gradient, there is no need toapply an obliquity factor to the measurements.Furthermore, it is assumed that the baselinebetween the antennas in the GBAS GF is alignedwith the runway for the landing approach. There-fore, the ionospheric error is the product of thebaseline length with the effective ionospheric slantgradient. In this case, Equation (1) becomes:
Δf ¼ eT xb þ Δtþ lΔnþ a xbk k þ «Δf (2)
Pullen, et al. [4] found that in CONUS, a could beas large as 425mm/km. They also stated that muchhigher values are expected in more active regionsnear the equator. In order to be conservative, it isassumed that values of up to 2000mm/km canoccur in the conducted analysis later in this paper.For the case of single-frequency GBAS ApproachService Type D (GAST-D) CAT III, the currentStandards and Recommended Practices (SARPs)requirement limits the responsibility of the groundsystem monitor to detection of gradients above300mm/km [8]. The reason for this is that anextensive analysis of the airborne monitoringsystem provided in GAST-D showed that onlyfronts which are larger than 300mm/km, and areundetected by the GF monitors, are potentiallyhazardous [8].
Assuming that both receivers have clock steeringturned on, differencing the carrier phase measure-ment of another satellite (reference satellite) fromEquation (2) (known as double difference measure-ment) eliminates the receiver clock bias and retainsthe gradient as shown in Equation (3).
Δ2f ¼ ΔeT xb þ lΔ2nþ a xbk k � a� xbk k þ «Δ2f (3)
where a* is the ionospheric slant gradient for thereference satellite. The front characteristics in [9]dictate that only a small portion of the sky will beaffected by a given front, ensuring that a fault free
52 Navigation Spring 2012

satellite exists and can indeed be used. Therefore, theterm a* ‖xb‖ can be neglected from (3) by computingthe double difference using a satellite that has alreadybeen validated as fault-free.
Since the line-of-sight to each satellite is computedfrom the ephemeris and the baseline vector betweenthe GF antennas is known, the first term on the righthand side of Equation 3 can be removed from themeasurements:
Δ2f� ΔeT xb ¼ lΔ2nþ a xbk k þ «Δ2f (4)
Separating the ionospheric front error from theambiguities in Equation (4) is quite challenging.However, it is known that the ambiguities can onlytake on integer values. Therefore, if the measure-ment noise is ignored, a necessary condition for thedetection of an ionospheric front is that the value ofa ‖xb‖ is not equal to an integer multiple of l. Thisfact forms the basis of the instantaneous ionosphericfront detection monitor.
Now let us consider the case with measurementnoise. The carrier phase measurement noise isassumed to be bounded by a Gaussian distributionwith zero mean and a standard deviation sf. There-fore, the noise term in Equation (4) will be normallydistributed with zero mean and a standard deviationof sΔ2f= 2sf . Based on the concept described earlier,the test statistic s is defined as
s ¼ Δ2f� ΔeT xb � l roundΔ2f� ΔeT xb
l
� �(5)
Under fault free conditions, this test statistic has azero mean and a standard deviation of sΔ2f. Given anacceptable false alarm probability under faultfree conditions, Pffd, a detection threshold can bedefined as:
T ¼ kffd sΔ2f (6)
where kffd is the false alarm multiplier computedfrom the inverse of the standard normal cumulativedistribution function (Φ) as
kffd ¼ �Φ�1 Pffd
2
� �¼ �
ffiffiffi2
perf�1 Pffd � 1
� �(7)
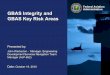
The probability of missed detection Pmd of thismonitor must also comply with the integrity riskrequirement. Therefore, given that there is a fault(ionospheric front), the probability that the teststatistic will be less than the threshold must meetthe required Pmd. As shown in Figure 1, a minimumdetectable error (MDE) can then be defined using thethreshold and Pmd. Using a similar approach toEquations (6) and (7), the MDE becomes
MDE ¼ T þ kmdsΔ2f ¼ kffd þ kmd
� �sΔ2f; (8)
where kmd is the missed detection multiplier and iscomputed as
kmd ¼ �Φ�1 Pmdð Þ ¼ �ffiffiffi2
perf�1 2Pmd � 1ð Þ: (9)
Due to the existence of a nearby integerwith its ownMDEbuffers, there will also be amaximumdetectableerror. This case is better illustrated in Figure 2. Theorigin point (corresponding to point 0) representsthe integer value of l round[(Δ2f�ΔeT xb)/l]. Theminimum detectable a‖xb‖ about integer 0 is givenby (kffd sΔ2f + kmd sΔ2f ). Gradients larger than thisvalue are detectable while satisfying the requiredavailability and integrity requirement allocations.However, there is also an upper bound to the detect-able gradient because of the presence of the adjacentinteger and the undetectable region around it. Inother words, if a |xb| is significant, it might fall closeto another integer where it cannot be detected withthe required probability. This illustration can beexpressed in a mathematical form that defines theundetected ionospheric slant gradient band as
ln� kffd þ kmd
� �sΔ2f
xbk k < a <lnþ kffd þ kmd
� �sΔ2f
xbk k (10)
where n here is an arbitrary integer number.The effectiveness of this monitor is fundamen-
tally based on the widths of the detection bands,which in turn are directly related to the baseline
0
T = kffd
MDE
PmdPffd
kmd
Fig. 1–Detection principles used to define the threshold and MDE
53Khanafseh et al.: Carrier Phase Ionospheric Gradient Ground Monitor for GBASVol. 59 No. 1

lengths, kffd, kmd, and the quality (standard devia-tion) of the differential carrier phase measurementerror. As an example, suppose that Pmd and Pffd
are 10-4. This value for Pffd was chosen as a conser-vative number given an availability requirement of99.9%. Given that the GBAS integrity risk require-ment is 10-9, setting Pmd equal to 10-4 is based on aprior probability of an ionospheric front occurring.Using these values in (7) and (9), we conclude thatkmd and kffd are 3.7 and 3.9, respectively. Assumingthat sΔ2f is 3mm, it is possible to plot regions ofnon-detectable slant gradient as a function of base-line length. These regions are shown as shadedlanes in Figure 3. Other values of sΔ2f have alsobeen used to generate similar plots in Figures 4–6.Figure 3 shows bands of detectable ionospheric
fronts (white spaces) and bands of undetectablefronts (shaded). These shaded bands are due to thebuffer zones around the nearby integers illustrated
in Figure 2. Therefore, as the carrier phase measure-ments become more noisy (larger sΔ2f) these shadedlanes will also get thicker to the point where nodetectable space is left. In contrast, as the carrierphase measurement quality improves (smaller sΔ2f)the undetectable shaded lanes get thinner leavingwider detection spaces. This in turn suggests thatlarger gradients can be detected using severalbaseline options and siting flexibility. For example,in Figure 3, a 100m baseline (which is currentlybeing used at the LGF) is sufficient to detect slantgradients from 250 – 1600mm/km. If this baselineis combined with another of 175m, the detectionrange increases to 140 – 2000mm/km.
If sΔ2f increases to 6mm (Figure 4), the range ofdetectable slant gradients using a 100m baselinedecreases to 470 – 1450mm/km. By adding another300m baseline, the monitor will be able to detectgradients in the range of 170 – 1750mm/km. Figure 5
Minimum detectable
ffdk mdk
Maximum detectable
Fig. 2–Illustration of the undetectable lanes around each integer
detectable
detectabledetectable
Fig. 3–Detection performance for the instantaneous monitor with sΔ2f = 3mm
54 Navigation Spring 2012

shows the case when sΔ2f is 10mm. In this case, theundetectable lanes get even thicker leaving smalldetection ranges. Therefore, multiple carefully chosenbaselines are necessary even to detect an ionosphericgradient ranging from 190 – 1100mm/km. If the mea-surement quality becomes so poor thatsΔ2f is 12mmormore, the monitor is no longer feasible for instanta-neous ionospheric front detection. This situation is
depicted in Figure 6, where no detection space is leftwhen the measurement noise reaches 13mm (1s).Even though the results shown in Figures 3–6
were obtained for specific values of Pffd and Pmd, theycan be generalized to other values of Pffd and Pmd byappropriately modifying the value of sΔ2f for eachplot. For example, Figure 3 (which was generatedusing sΔ2f =3mm) is in fact for a case where
Fig. 5–Detection performance for the instantaneous monitor with sΔ2f = 10mm
detectable
Fig. 4–Detection performance for the instantaneous monitor with sΔ2f = 6mm
55Khanafseh et al.: Carrier Phase Ionospheric Gradient Ground Monitor for GBASVol. 59 No. 1

kffd þ kmd
� �sΔ2f =22.8mm. Therefore, if different
values for kffd and kmd are required, the figurewill correspond to a value of sΔ2f that is equal to22.8/(kffd+ kmd) mm. Figures 4–6 can be reinterpretedsimilarly.In summary, the monitor feasibility is sensitive to
the quality of the carrier phase measurements. Theuses envisioned here for the GBAS LMAs pose anew challenge because such precision for carrierphase measurements is not required for the nominalfault-free GBAS functionality and was not a specificrequirement in the design of these antennas. Theexceptional theoretical thermal noise and multipathperformance of the LMA suggests that such carrierphase precision should be achievable in principle,but the behavior of the antennas in detail at themillimeter level must be experimentally analyzed.Of particular importance in this regard are thepotential variations in phase patterns betweenantennas, which will be discussed next.
EXPERIMENTAL VALIDATION
To examine the performance of the LMA,measurements were collected from four LMAantennas at the LAAS Test Prototype (LTP) facilityat the William J. Hughes FAA Technical Center inAtlantic City, New Jersey. The LMA is an arrayantenna that covers elevation angles of 5–90 deg;it is resistant to terrestrial interference sourcesand meets the signal-to-noise ratio and multipathrejection requirements at low elevations. Althoughthe antenna phase center variations are boundedby a few centimeters, in the previous section weshowed that the measurement accuracy requiredby the instantaneous ionospheric front monitormust be within millimeters. In this paper, resultswill be shown for an example antenna pair (thefirst two antennas).
Figure 7 shows an example of the double differencecarrier phase residual for one satellite (PRN 31). Thisresidual is computed as
Fig. 6–Detection performance for the instantaneous monitor with sΔ2f = 12mm and sΔ2f = 13mm(in the sub figure)
Fig. 7–Double difference carrier phase residual for PRN 31
56 Navigation Spring 2012

r ¼ Δ2f� ΔeT xb � l roundΔ2f� ΔeT xb
l
� �(11)
As shown in Figure 7, non-random residual errorsare larger and occur at lower frequencies than thosethat can be caused by multipath and thermal noisevariations. This behavior is not unique to thisparticular satellite. Figure 8 shows a composite ofall visible satellites over a 24h period in whichseveral satellites display similar wavy patterns intheir residuals. Furthermore, the residual wavypattern shows day-to-day repeatability indicatingthat the source of the effect is a systematic differencein the phase patterns between antennas. This patterncannot be ignored because of its effect on increasingthe standard deviation of the double differenceresidual.
Since this monitor will be used in high integrityapplications, simply computing an estimate of thestandard deviation (sΔ2f ) of the residual errors isnot enough to ensure integrity. Instead, the tails ofthe distribution must be appropriately overboundedby a Gaussian distribution with a standard deviationthat is inflated relative to this estimated value. Acommon method of constructing an overbound is touse the folded cumulative distribution function(CDF). The folded CDF is a CDF where one minusthe cumulative probability is plotted on a y-axis(in log scale) for cumulative probabilities greaterthan one half. In Figure 9, the CDF for all satelliteresiduals is shown. Alongside the residual foldedCDF is a theoretical over-bounding Gaussian foldedCDF with a zero mean and various sigma values(dashed curves). The figure shows that the residualCDF cannot be overbounded by a standard deviationof up to 6mm, which is not a promising result for thefront monitor.
Removal of the undesired systematic effects isnecessary to achieve the levels of residual carrierphase error needed for the monitor applicationsunder consideration. In this regard, the differentialphase pattern behavior was captured as a functionof satellite azimuth and elevation by fitting a fullday’s worth of LTP satellite data to a sphericalharmonic model. In previous work [6], similar modelshave been used to calibrate the Integrated MultipathLimiting Antennas (IMLA).
Spherical Harmonics Model
A spherical harmonics function of order k iscomposed of a Legendre trigonometric polynomialseries of order n and degree m (Equation (12)). Thisfunction is able to capture the observed variation asa function of azimuth and elevation.
U θ;cð Þ ¼Xkn¼0
JnPn0 cosθð Þ þXkn¼1
Xnm¼1
½Cnm cos mcð Þ
þSnm sin mcð Þ�Pnm cosθð Þ
(12)
where,Jn, Cnm and Snm spherical harmonic coefficientsθ zenith anglec azimuth angle, andPnm Legendre polynomial of order n,
degree m, and is defined as
Pnm cosθð Þ ¼ 2�n sinθð ÞmXl
q¼0
�1ð Þq
� 2n� 2qð Þ!q! n� qð Þ! n�m� 2qð Þ! cosθð Þn�m�2q
where l ¼ floor n�m2
� �:
Folded CDF of Residuals
-40 -30 -20 -10 0 10 20 30 40Res. (mm)
100
10-1
10-2
10-3
10-4
Cu
mu
lati
ve P
rob
abili
ty
6.0 mm4.5 mm3.0 mm
Gaussian Overbound
Fig. 9–Folded CDF for the residuals in Figure 8 with three over-bounding Gaussian curves.
0 5 10 15 20
30
20
10
0
-10
-20
-30
Res
. (m
m)
Time (hr)
Combined Res. For all PRNs
Fig. 8–Double difference carrier phase residual for all visiblesatellites
57Khanafseh et al.: Carrier Phase Ionospheric Gradient Ground Monitor for GBASVol. 59 No. 1

The model used to calibrate the antennas usesthe double difference carrier phase residual. There-fore, the spherical harmonics function in Equation(12) must be written in terms of the double differ-ence quantities: azimuth and elevation angles ofboth satellites i and j and the two antennas aand b.
r ¼ Uab θi;ci� ��Uab θj;cj� �þ vΔ2f (13)
where Uab is written in terms of baseline antennascalibration coefficients ΔJnm, ΔCnm, and ΔSnm as,Since Equation (14) is linear in respect to the
calibration coefficients, it can be written in a vectorform as
r ¼ PΔcþ vΔ2’ (14)
where r is the residual vector, PΔ is a matrixcontaining the Legendre polynomials P and c is avector that contains the coefficients ΔJnm, ΔCnm,and ΔSnm.The spherical harmonics coefficient vector c in
Equation (14) can be estimated using a Kalman filterfor all satellites in view using a 24h data set. The
results of this filtering process are shown in Figure 10.The processed satellite passes (azimuth and elevationangles) are shown in the sky plot in Figure 10-a. In thecalibration process, an 8th ordermodel (k=8)was usedbecause it was concluded in [6] that an 8th ordermodelis sufficient to reduce the wave amplitude. Using thisestimated ΔKnm, a calibration map for all azimuthand elevation angles is generated and the correctionmagnitude is represented in the contour plot inFigure 10-b. This calibration is valid for the specificbaseline under consideration and a different calibra-tion map must be created for other baselines. Sinceno data was available in the northern section ofthe sky map (as illustrated by the sky plot inFigure 10-a), calibration at this area is not representa-tive and was not included in the contour plot ofFigure 10-b. Notice that the sky maps are notsymmetric, which again suggests that the cause isindividual phase center variations of these antennas.
The corrected residuals using the spherical harmo-nics model are shown in Figure 11. The experimentalresults show that using a one-time calibration, thesystematic wave patterns have been removed. Also,Figure 12 shows the CDF of the corrected residuals
Uab θ i;ci� ��Uab θ j;c j� � ¼ Xkn¼0
Δ Jnm Pn 0 cos θ i� �� Pn 0 cos θ j
� �
þXkn¼1
Xnm¼1
ΔCnm cos mci� �� cos mcj� �� �Pnm cos θ i
� �� Pnm cos θ j� �
þXkn¼1
Xnm¼1
Δ Snm sin mci� �� sin mcj� �� �Pnm cos θ i
� �� Pnm cos θ j� �
(14)
Correction (m)
(a) (b)
Fig. 10–a- Azimuth-elevation sky plot showing the satellite passes that are used in estimatingthe spherical harmonics coefficients, b- Contour plot showing the magnitude of the resultingspherical harmonics corrections that are used to calibrate the antennas.
58 Navigation Spring 2012

with three overbounding Gaussian CDFs. The figureshows that if a standard deviation of 3mm is used,the tails are not overbounded. The standard deviationmust be inflated to 4.5mm to overbound the residualCDF out to a probability of 10-4. It should be notedthat the remaining points that are not overboundedby this distribution were caused by outliers that wereobserved in the data. In order to be conservative, astandard deviation of 6mm is used as an overbound.This value is also consistent with the residual resultsfor all baselines. As a result, this monitor is feasiblefor detecting ionospheric slant gradients as shown inFigure 4. Using that figure, different baseline combi-nations can be chosen to cover the desired range ofslant gradients to be detected.
The calibration map and the estimated coefficientsare antenna and site dependent. If this calibration is
performed using different antennas or is performedat any other airport or facility, new coefficients mustbe estimated. Nevertheless, in principle, this type ofcalibration should be valid for all times given thatthe antennas and siting locations have not changed.The source of outliers that are observed in Figures 8and 11 and high tail activity (Figures 9 and 12) inthe LTP data will also be investigated. Data fromother installations at busy airports will also beconsidered. Furthermore, the monitor concept will begeneralized to detect ionospheric front anomalies atall times (instead of only at the time of acquisition)and to potentially extend its capabilities to detectother anomalies like ephemeris failures.
CONCLUSIONS
This paper describes in detail an instantaneousmonitor for detecting ionospheric front anomaliesusing double differential carrier phase measure-ments. The monitor utilized GBAS ground antennabaselines for detection. It was shown that certaincombinations of baseline lengths can extend the rangeof detectable ionospheric slant gradients. However, inorder for such a monitor to be feasible, the carrierphase measurement noise must be less than 10mm.In order to validate the feasibility of this monitor,carrier phase performance of typical GBAS LMAantennas has been analyzed. An assessment ofdifferential phase pattern variations with respect toazimuth and elevation has been presented. Thispaper defines the mathematical model developed fordifferential phase variation, explains its use in preciseantenna calibration, and demonstrates that theresulting LMA double difference carrier phase errorscan be overbounded by a standard deviation of 6mm.
REFERENCES
1. Datta-Barua, S., Walter, T., Pullen, S., Luo, M.,Blanch, J., and Enge, P., “Using WAAS IonosphericData to Estimate LAAS Short Baseline Gradients”.Proceedings of the 2002 National Technical Meetingof The Institute of Navigation, San Diego, CA,January 2002, pp. 523–530.
2. Datta-Barua, S., Walter, T., Pullen, S., and Enge, P.,“Modeling the 20 November 2003 Ionosphere Stormwith GRACE.” Proceedings of the 20th InternationalTechnical Meeting of the Satellite Division of TheInstitute of Navigation (ION GNSS 2007), Fort Worth,TX, September 2007, pp. 2840–2848.
3. Ene, A., Qiu, D., Luo, M., Pullen, S., and Enge, P., “AComprehensive Ionosphere Storm Data AnalysisMethod to Support LAAS Threat Model Development.”Proceedings of the 2005 National Technical Meeting ofThe Institute of Navigation, San Diego, CA, January2005, pp. 110–130.
4. Pullen, S., Park, Y. S., and Enge, P., “Impact and mitiga-tion of ionospheric anomalies on ground-based
0 5 10 15 20
50
40
30
20
10
0
-10
-20
-30
-40
-50
Res
. (m
m)
Time (hr)
Combined Res. for All PRNs
Fig. 11–Calibrated double difference carrier phase residual for allvisible satellites
6.0 mm4.5 mm3.0 mm
Gaussian Overbound
Folded CDF of Residuals
-40 -30 -20 -10 0 10 20 30 40Res. (mm)
100
10-1
10-2
10-3
10-4
Cu
mu
lati
ve P
rob
abili
ty
Fig. 12–Folded CDF for the calibrated residuals in Figure 11 withthree overbounding Gaussian curves.
59Khanafseh et al.: Carrier Phase Ionospheric Gradient Ground Monitor for GBASVol. 59 No. 1

augmentation of GNSS.”Radio Science, Vol. 44, RS0A21,2009. DOI: 10.1029/2008RS004084.
5. Simili, D. V., and Pervan, B., “Code-Carrier DivergenceMonitoring for the GPS Local Area AugmentationSystem.” Proceedings of IEEE/ION PLANS 2006, SanDiego, CA, April 2006, pp. 483–493.
6. Gratton, L., Khanafseh, S., Pervan, B., Pullen, S.,Warburton, J., and Hughes, W. J., “ExperimentalObservations and IntegrityMonitorApplications of LAASIMLA Carrier Phase Measurements.” Proceedings of the17th International Technical Meeting of the SatelliteDivision of The Institute of Navigation (ION GNSS2004), Long Beach, CA, September 2004, pp. 2259–2270.
7. Gratton, L., Chan, F., and Pervan, B., “Algorithms forAirborne Ionospheric Front Detection in LAAS Using
Carrier Phase and INS Measurements.” Proceedingsof the 2005 National Technical Meeting of TheInstitute of Navigation, San Diego, CA, January2005, pp. 131–139.
8. Murphy, T., Harris, M., Pullen, S., Pervan, B., Saito, S.,Brenner, M., “Validation of Ionospheric Anomaly Miti-gation for GAST D.” ICAO NSP Working Group of theWhole (WGW) Meeting, Montreal, Canada, WGW/WP14, May 17–28, 2010.
9. Luo, M., Pullen, S., Walter, T., and Enge, P.,“Ionosphere Spatial Gradient Threat for LAAS:Mitigation and Tolerable Threat Space. Proceedingsof the 2004 National Technical Meeting of The Insti-tute of Navigation,” San Diego, CA, January 2004,pp. 490–501.
60 Navigation Spring 2012










![Instantaneous Detection of Spatial Gradient Errors in ...web.stanford.edu/...Presentation.../S11.Jing_SCPNT.pdf · [3]Jing, J., et al., "Multi-dimensional Ionospheric Gradient Detection](https://img.pdfslide.net/doc/110x75/5f0dcfc67e708231d43c3492/instantaneous-detection-of-spatial-gradient-errors-in-web-3jing-j-et-al.jpg)

![The GBAS Landing SystemThe GBAS Landing SystemTitle: Microsoft PowerPoint - Boeing GBAS Presentation, Beijing, October 29, 2009.ppt [兼容模式] Author: Shile Created Date: 11/10/2009](https://img.pdfslide.net/doc/110x75/5a727f467f8b9ac0538da536/the-gbas-landing-systemthe-gbas-landing-systemtitle-microsoft-powerpoint-boeing.jpg)













