Embed Size (px)
Citation preview

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 1/41
M. S. Ramaiah School of Advanced Studies 1
POWER STEERING
SHAILENDRA A
CDB0912004
Module Code: AEL 2515Module Title: Control systems Engineering.
Module Leader: K Vishwanath Reddy

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 2/41
M. S. Ramaiah School of Advanced Studies 2
Head Maximum Score
Technical Content 5
Grasp and Understanding 5
Delivery – Technical and
General Aspects
5
Handling Questions 5
Total 20
Marking

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 3/41
M. S. Ramaiah School of Advanced Studies 3
Introduction
• It is the system used for directional change of an
automobile
• It connects rotary motion of steering wheel into angular
moment to turn vehicle into particular direction
• This system is connected with front wheels of vehicles and
back wheels in some heavy vehicles making it 4 wheel
steering

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 4/41
M. S. Ramaiah School of Advanced Studies 4
Types of powered steering
• Hydraulic powered steering
• Electronic powered steering

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 5/41
M. S. Ramaiah School of Advanced Studies 5
Hydraulic powered steering
Hydraulic power steering (HPS) system uses high pressure
fluids for assisting the steering movement which uses the
engine's power as a drive source
Figure 1 Hydraulic Power steering

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 6/41
M. S. Ramaiah School of Advanced Studies 6
•Electronic powered steering uses an electric motor to drive
steering linkage directly.
•The power steering mechanism is therefore independent of
engine speed, resulting in significant energy saving.
Electronic powered steering
Figure 2 Electronic powered steering

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 7/41 M. S. Ramaiah School of Advanced Studies 7
Steering system components
•Steering wheel- column and shaft - driver inputs
• Steering gear - changes direction - rotating steering motion
into linear motion
• Steering linkage - connects steering gear to steering arms
• Ball joints - allows movement of steering components and
suspension

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 8/41 M. S. Ramaiah School of Advanced Studies 8
HPS vs EPS

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 9/41 M. S. Ramaiah School of Advanced Studies 9
Steering gear systems
• Recirculating ball
• Rack and pinion

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 10/41 M. S. Ramaiah School of Advanced Studies 10
Recirculating ball type
• Uses balls on a worm gear
• Has a pitman arm
• Balls inside the gear ride inside guide paths
• Uses a Parallelogram Linkage
steering arm system
• Pitman arm moves steering tie rods
Figure 3 Recirculating ball

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 11/41 M. S. Ramaiah School of Advanced Studies 11
Rack and pinion
• Fewer moving parts than the recirculating ball
• Smaller and more compact
Figure 4 Rack and Pinion

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 12/41 M. S. Ramaiah School of Advanced Studies 12
• Steering ratio is a measurement of how many turns that a
steering wheel takes to go from a full lock to the other full
lock
•Basically how many turns from all the way from left to right
• Also measured from the center (straight) to a full lock turn
• Fast ratio is 2-3 turns lock to lock
•Slow is about 4 or 5 times lock to lock
• 15:1 ratio – wheels move 15deg for 1 degree of steering
wheel movement
Steering ratio

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 13/41 M. S. Ramaiah School of Advanced Studies 13
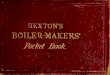
Ackerman Steering Geometry
• Basic layout for
passenger cars, trucks,
and ag tractors
• δo = outer steering angle
and δi = inner steeringangle
• R= turn radius
• L= wheelbase and
t=distance between tires
δo δi
L
t
R
Figure 1.1.
Pivoting
Spindle
Turn
Center
Center of
Gravity
δo δi
Figure 5 Ackerman Steering geometry

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 14/41 M. S. Ramaiah School of Advanced Studies 14
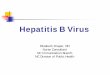
Block Diagram
CAN
Figure 6 Block Diagram

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 15/41 M. S. Ramaiah School of Advanced Studies 15
Components
•MDPSCM(Motor Driven Power Steering Control module)
• Motor
• Steering Angle sensor
• Steering Torque sensor
• Steering Column
• Power source

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 16/41 M. S. Ramaiah School of Advanced Studies 16
Steering Column
Figure 7 Steering Shaft

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 17/41 M. S. Ramaiah School of Advanced Studies 17
Motor Specification
Nominal current - 78A
Nominal Torque - 3.7NM
Nominal Speed – 1000RPM
Type used : Brushless Motor

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 18/41 M. S. Ramaiah School of Advanced Studies 18
Working
Working of EPS

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 19/41 M. S. Ramaiah School of Advanced Studies 19
Working
• Driver steers the steering wheel
• Torsion bar detects the distortion of tyre and steering column
• Torque sensor detects the distortion of torsion bar
• The light is radiated from the element through light gun on to
the disks

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 20/41 M. S. Ramaiah School of Advanced Studies 20
Working
Working of EPS- Light detection

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 21/41 M. S. Ramaiah School of Advanced Studies 21
•The shadow generated by light transmitted is detected bylinear array( receiving element)
• At this time the distorted amount of torsion bar makes the
difference in the shadow on to the disks
• The linear array detects the shadow to detect whether it is left
turn or right turn
Working

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 22/41
M. S. Ramaiah School of Advanced Studies 22
Working- MDPSCM
Working of EPS- Data sharing

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 23/41
M. S. Ramaiah School of Advanced Studies 23
• Averaging the detected values of the torque senor, the average
is sent to the MDPSCM
• MDPSCM controls the motor current based on the calculated
values

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 24/41
M. S. Ramaiah School of Advanced Studies 24
Calibration

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 25/41
M. S. Ramaiah School of Advanced Studies 25
Over heat mechanism/Advanced system

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 26/41
M. S. Ramaiah School of Advanced Studies 26
Type of region

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 27/41
M. S. Ramaiah School of Advanced Studies 27
Vehicle equipped with ABS
Vehicle speed from right wheel speed sensor

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 28/41
M. S. Ramaiah School of Advanced Studies 28
Vehicle without ABS
Vehicle speed from Engine ECM

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 29/41
M. S. Ramaiah School of Advanced Studies 29
Diagnostic Codes

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 30/41
M. S. Ramaiah School of Advanced Studies 30
Figure 7
Mechanical system

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 31/41
M. S. Ramaiah School of Advanced Studies 31
• Jh- assembly rotary inertia of steering wheel and input shaft
• Jm is the equivalent rotary inertia of power motor armature shaft
and reducer driving gear
• Jr is the equivalent rotary inertia of steering mechanism and front
tire
• θh- Steering wheel angle
• θp- steering pinion angle
• θm- power armature shaft angle
• θf-Front tyre angle

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 32/41
M. S. Ramaiah School of Advanced Studies 32
• Th- Input torque of steering wheel
• Ts- Measured value of torque sensor
• Tm- Input torque of power motor
• Ta- Actual assisting torque
• Tr- Steering resistive torque equivalent to steering shaft
• Ks- Rigidity co efficient of twisting rod
• Ka- Motor electromagnetic torque coefficient
• Bh- Damping coefficient of steering input shaft
• Bm- Damping coefficient of motor armature shaft

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 33/41
M. S. Ramaiah School of Advanced Studies 33
• Br- Equivalent damping coefficient of steering mechanism and
front tyre
• G1- Reduction ratio from motor to steering shaft
•G2- Reduction ratio from steering pinion to front wheel
• I- Motor current

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 34/41
M. S. Ramaiah School of Advanced Studies 34
EPS differential equations

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 35/41
M. S. Ramaiah School of Advanced Studies 35
EPS differential equations
• The motor current is proportional to the measured value of
torque sensor. It is given by
I = KTs = KKs (θ h - θ p)
• But taking into account the effects of the motor inertia,
damping and friction, a compensatory current is added to
the motor current.
• The compensated current is modeled as:

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 36/41
M. S. Ramaiah School of Advanced Studies 36
Transfer function
Under normal driving condition, the steering system keeps
transferring the impression of the contact conditions between
the tires and road to the hand wheel, then the driver feels the
force feedback.
This is what called road feeling. It is considered to be a very
important factor because it acts directly on the driver’s hands
and the driver determines his/her actions based on
this force.

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 37/41
M. S. Ramaiah School of Advanced Studies 37
Transfer function
• For studying the road feeling, we propose a method that a
steering wheel is set in a fixed mode
• The mode corresponds to the actual driving conditions that
the driver is holding the steering wheel tightly
• When the wheel set with a fixed mode, the mathematical
model of the hand wheel as
Th = Ts = - Ksθ p

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 38/41
M. S. Ramaiah School of Advanced Studies 38
From equation 7
The transfer function from the steering resistance torque to
the steering wheel torque can be obtained as
Transfer function
C i

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 39/41
M. S. Ramaiah School of Advanced Studies 39
Conclusion
• Hydraulic power steering is a primitive technology used
for decades and has improved a lot with time.
• Hydraulic power steering are speed sensitive and work
better than the older hydraulic power steering.
• Electric Power Steering gives better response at different
speeds as compared to Hydraulic Power Steering
• Electric Power Steering is better than Hydraulic Power
steering in terms of maintenance, mileage and simplicity
and widely used nowadays in all automobiles based on
applications
R f

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 40/41
M. S. Ramaiah School of Advanced Studies 40
References
• XueWu Ji, XiaoPing Ma, KuiYuan Chen, Experimental study on EPS system
performance, Journal of Jiangsu University (National Science Edition),
25(2):116-119, 2004.
• http://www.csuohio.edu/engineering/ece/research/theses/2010/Kandula%20Pr
asanth%20Babu.pdf
• http://am.delphi.com/pdf/techpapers/1999-01-0399.PDF
• http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=5203081&url=http%3
A%2F%2Fieeexplore.ieee.org%2Fxpls%2Fabs_all.jsp%3Farnumber%3D5203
081
• http://liu.diva-portal.org/smash/record.jsf?pid=diva2:23027
• http://www.jofcis.com/publishedpapers/2012_8_1_65_72.pdf
•http://tos.pp.fi/koukku/892403.pdf

7/29/2019 CD b 0912004
http://slidepdf.com/reader/full/cd-b-0912004 41/41
Thank You