Embed Size (px)
Citation preview

May 17, 2004 18:22
Proceedings of DETC’042004 ASME Design Engineering Technical Conferencesand Computers Information in Engineering Conference
Salt Lake City, Utah, USA, September 28-October 2, 2004
DETC04/DAC-57322
A DYNAMIC SIMULATION OF CAM ACTUATED ROBOTIZED GEARBOX
E. Pennestrı, R. Stefanelli ∗, P.P. Valentini, L. VitaDepartment of Mechanical Engineering
University of Rome Tor VergataVia del Politecnico 1, 00133 Rome (Italy)
Email: [email protected]. +39-0672597135 Fax. +39-062021351
ABSTRACTIn this paper a simulation of the cam actuator of a robo-
tized gearbox is presented. The actuator is a barrel cam whichmoves a pin according to a prescribed motion law. The model ofcontact, between cam and follower, is based on a finite elementsapproach of the theory of beam on continuous elastic founda-tion, modified by the authors to include the effect of shear onthe deformation and dynamic effects. The foundation modulus iscomputed using Hertz theory taking also into account the changeof principal curvature values during the relative motion betweencam and follower. This model has been embodied in a completegear shifting simulation in order to compare the effects on con-tact forces, wear actions and shifting time of different campro-files.
NOMENCLATURE
A Cross section area.a,b Dimensions of the elliptical footprint.[C] Damping matrix.Cs Friction synchronizing torque.di Distance traveled between two consecutive impatcs.Ei Young’s modulus ofi − th body.e Restitution coefficient (Newton’s law).Fs Synchronization force.G Shear modulus.
∗Address all correspondence to this author.
h(ϑ) Rise of the cam.I Moment of inertia of cross section area.J2zz Gear moment of inertia w.r.t. axis of the shaft.[K] Stiffness matrix of Timoshenko beam element.kel f Stiffness per unit length of the foundation.ki Stiffness of body in contact (subscripti = 1 refers to
the cam,i = 2 refers to the pin).kspring Spring stiffness in the spring-damper element.l Length of foundation.le Eccentricity of the relative position of teeth of sleeve
and gear.lel Length of Timoshenko beam element.[M] Mass matrix of Timoshenko beam element.m1 Mass of sleeve.P Overall force acting on the pin.p Load acting on a nodes of the pin mesh.q(x) Distributed load acting on the pin.Ri j Principal radiusi of body j.Rim Distance between impact point on the gear and the
axis of the shaft.R0 Car wheel radius.Rs Synchronizer ring radius.s(t) Vector of translational movement imposed by the
cam to the pin.ti Time of i − th impact.u Vector of generalized nodal displacement.VA Relative velocity between the sleeve and the gear.
1 Copyright c© 2004 by ASME

V1 Velocity of sleeve after generic impact.v1 Velocity of sleeve before generic impact.Vv Vehicle speed.y(x) Deformation of the center line of the pin.zin,i Gear teeth number of input gear ofi−th transmission
ratio.zout,i Gear teeth number of output gear ofi − th transmis-
sion ratio.α Half cone angle of the synchronizing ring.γ Angle at the top of dog teeth.δ Deflection of the pin under the loadP.∆ωi,i+1 Relative speed between the gear i+1 and the shaft
where is mounted on, in the shifting up i,i+1.ζ Angular displacement between principal curvature
direction of the surfaces of pin and cam groove.ηp Transmission ratio of the differential box.ηi Transmission ratio of thei − th gear.ϑ Angular position of the cam.κ Shear factor.µ Static friction coefficient.µd Dynamic friction coefficient as function of angular
velocity and temperature.ρ Density.χi i − th principal curvature.Ω2 Relative angular velocity of gear after generic im-
pact.ω2 Relative angular velocity of gear before generic im-
pact.ωin,i Input angular speed ofi − th transmission ratio.ωout,i Output angular speed ofi − th transmission ratio.
INTRODUCTIONThe current car market trend is to improve driving comfort
and safety and to reduce fuel consumption. To achieve thesegoals incremental technical improvements are also important,thus the study of gearboxes and the ways to shift gears is a veryimportant topic in car design. In Europe, many car companieschoose to equip their products with robotized gearboxes. Thegearbox architecture is the same as in traditional ones (seefig.1), but the actuation of the sleeves is accomplished by electrome-chanical or hydraulic devices. A common solution is to use abarrel cam with form-closed1 translating follower (see fig. 2).The challenge is to design the optimal cam profile and to choosethe most appropriate control law to transfer motion to the en-tire system. The first task is to obtain great reliability from theactuating device mounted on touring car: wear problems mayoccur because of excessive sliding. Wear is not uniform alongthe cam profile and it causes loss of mechanism functionality.
1The follower is geometrically costrained to maintain contact with the cam.
Figure 1. STANDARD ARCHITECTURE OF A GEARBOX.
Figure 2. A BARREL CAM WITH GROOVES.
An optimal design of the cam profile should achieve a uniformpressure distribution, and as a consequence a uniform wear.Theimprovement of the kinematic and dynamics performance, canalso reduce the wear action. The second task to be achieved isa rapid gear shifting to increase car performance. Short shift-ing times means smaller engine speed reduction, the so calledtorque leakage. To achieve this goal the cam has to operate at thehighest speed, thus increasing the follower acceleration.This in-crease the inertial loads and, consequently, contact between camand follower can be lost. The form-closed cam-follower typeispreferred to the force-closed one because it avoids thejump2.
Other problems can occur when the cam is operated at highspeed. The load generated by inertial forces is affected by pindeflection. In the proposed model the cam is assumed to oper-ate at constant speed, even if the actual cam acceleration affectsfollower dynamic behavior [1].
2This phenomenon occurs when the inertial forces become higher than clos-ing ones, thus the contact cannot be ensured.
2 Copyright c© 2004 by ASME

The dynamic behavior of the cam actuator has been investi-gated. A Fortran routine, which simulates every phase of theac-tuation process has been implemented. The object of this investi-gation is a gearbox equipped with a single cone synchronizer. Nohypothesis was introduced about the type of the actuator whichdrives the barrel cam at a constant speed. The Fortran routinecan simulate common topologies of gearboxes with known in-ertial and geometrical characteristics. A simple GUI assist theuser through the input operation and settings. Part of the routineimplements a specific FEM model. The mesh is automaticallygenerated at every launch consistently with the dimension of thegearbox which have to be simulated. In particular, the ODE sys-tem governing the interaction between cam and follower, wasnumerically integrated by means of RADAU5 [2]. In addictiona parametrical FEM procedure was integrated with the other dy-namic approaches in a single routine. Thus the simulation ofeach phase is executed within the same program.
The routine implements two different type of cam, the con-stant speed and the cycloidal one. However, other contour ge-ometries could be included.
Using a unique routine, the synchronization phase can besimulated with the actual value of synchronization load, eval-uated considering also the interaction between the pin and thegroove. The routine also simulates the meshing process. Thenu-merical procedures takes into account the geometry of gear teethand sleeve and computes, by means of closed form equations, thekinematic of the parts after each rebound.
THE ROBOTIZED GEARBOXA robotized gearbox is a common gearbox in which the
movement of the sleeves is actuated by a barrel cam. This camhas several grooves, one for each sleeve to be moved. Usuallyin a common car gearbox there are three sleeves, even thoughother solutions are possible [3]. Each sleeve is connected to thecam by means of a beam and a pin which engages its groove. Inmany practical application this pin has a cylindrical or ellipsoidalshape. When the cam rotates, the grooves impress the pin a pre-scribed motion law to produce the appropriate configurationofmeshing gears. The optimized design and manufacturing of thegrooves are very important in order to improve performance andreliability of the entire system. The lubricated contact betweenthe grooves and the pins, because of the demanding pressure andkinematic features, has to be shaped properly. The contact pres-sures exerted are linked to the synchronization force and, as aconsequence, to shifting dynamics. The barrel cam is actuatedby means of an electromechanical or hydraulic system which isconnected to the cam through an indexing mechanism and a driv-ing pinion.
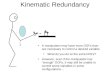
In Fig. 3 is shown a typical view of the shifting device,which includes the cam (barrel type), pin, beam, fork, synchro-nizing ring (this part is substituted with adog ringin racing car),
Figure 3. SHIFTING DEVICE.
sleeve and gear. The principles of functioning are identical tothose of manual gearboxes. When a gear shift has to be exe-cuted, the gear to be meshed has a different angular speed withrespect to the shaft on which is mounted. The synchronizer hasto reduce to zero the speed difference between gear and shaft.To achieve this, an axial movement of the sleeve, actuated bythefork, pushes the conical surface of the synchronizer ring ontheconical surface on the gear. The applied force generates a frictiontorque between the two surfaces causing the synchronization oftheir angular speeds. There is a sleeve, and a correspondingfork,for each gear pair (1st−2nd, 3rd −4th,..). In a manual gearbox,the shifting operation requires two movements of the lever.Withthe transverse movement the right sleeve is engaged. With thelongitudinal one, the gear connected to this sleeve, is meshed.In form-closed robotized gearboxes these two movements aredriven by the cam rotation. In particular, the groove shape onthe barrel cam is such that the motion of only one sleeve at atime is allowed. The cam rotates in the same direction for allup-shifting operations and reverse its rotation for the down-shiftingoperations.
As can be observed in Fig. 3, a critical aspect of the overalloperation is the cam-pin interaction. The cam profile and thepinreaction force influence the shifting process.
From the point of view of reliability, the difference betweenmanual and cam actuated robotized gearbox3 is the cam followerinteraction. To study the overall dynamic behavior of the system,the model in Fig. 4 has been proposed. The figure shows (not toscale) the parts of the system. The beam is not always mountedon the device4, therefore it is not a fundamental part of the actu-ating system and its bending elasticity can be taken into account
3Other robotized gearboxes do not use cam-follower system, but actuated di-rectly by the turret shown in Fig. 1.
4The pin which engage the cam groove can be directly mounted onthe fork(see Fig. 3)
3 Copyright c© 2004 by ASME

Figure 4. SHIFTING DEVICE SCHEME.
with a linear lumped torsional spring. The axial stiffness is alsosimulated by means of a lumped spring element.
The cam pushes the beam by means of the pin. This isconnected to the fork which engages the groove of the sleeve.While the synchronizer ring is working, the sleeve stops becauseof the lock-upsystem. When the synchronization is terminatedthe sleeve moves toward the gear meshing tooth. Another criticalphase of the shifting operation is the contact between the internalteeth of the sleeve and those of the gear. To make the meshingeasier, the teeth have a triangular shape in the direction ofrela-tive motion. Before the contact, the sleeve moves axially towardthe gear, but after the contact, because of the geometry of theteeth, an angular velocity between sleeve and gear is generated.A dynamic model of the contact has been developed taking intoaccount the actual teeth geometry, the relative velocity betweengear and sleeve, and the inertia properties. At the end of theentire process, to keep the sleeve in the right position while thepower flow is transmitted, the teeth have a wedge shaped profile(see right side of Fig.7) which generates an axial holding forceunder the torque action.
THE MATHEMATICAL MODELThe dynamic interaction between cam and follower is inves-
tigated using a finite element model and the theory of beam oncontinuous elastic foundation. According to this theory, the de-formable beam is in contact with the elastic foundation which ap-plies a distributed load proportional to the beam deflection. Thepurpose is to investigate the deflection of the parts of the sys-tem caused by the great acceleration. The pin is assumed as the”beam” and the wall of the groove as the foundation. It is alsopossible to appreciate the actual load between the pin and thegroove coming from the Hertz model of contact. The differentialequation governing the model is:
d4y(x)dx4 −
4(
d2y(x)dx2
)
EIβ4
GAκ= −4y(x)β4 (1)
Figure 5. FEM MODEL OF PIN IN CAM GROOVE.
whereβ4 = k4EI andk are the stiffness of the foundation. The
Eqn. (1) also takes into account the shear action on the deforma-tion5 of the pin.
The pin of the follower has been discretized using Timo-shenko beam elements [4, 5] and the foundation elasticity (camgroove walls) is simulated by means of parallel spring-damperelements. Figure 5 shows the mesh scheme. The walls of thegroove are considered rigid and the damping and stiffness char-acteristics have been lumped in spring-damper elements actingon each node of the mesh.
The stiffness of the foundation is a linear approximation ofthe one obtained from Hertz theory [6]:
kel f =Fs
δ · l
∣
∣
∣
∣
P=Fs
, (2)
where
δ =12
(k1 +k2)P2
[
ln
(
4ab
)2
+1
]
. (3)
The value of the constant stiffness of each spring can beassumed to bekspring = kel f · lel; instead 2kspring = kel f · lel atboundary nodes (see also [4]). The Eqn. (3) shows that the dis-placementδ depends on the parametersa andb of the footprint,which depend on loadP. Thus, the displacement is a nonlinearfunction of the loadP. A value of the equivalent stiffness6 canbe estimated as the reciprocal of the slope of the straight linebetween the origin and point A (corresponding to the synchro-nization loadFs) of theδ versusP diagram (Fig. 6).
In order to compute the actual deformation due to contact,and also the stiffness constant valuekel f , the footprint shape has
5The original expression of the equation is:
EI d4(x)dx4 = − dT
dx = q(x)−ky(x)
4 Copyright c© 2004 by ASME

Figure 6. LINEAR APPROXIMATION OF THE STIFFNESS OF THE
GROOVE WALLS.
to be considered. This one is elliptical and it is non symmetricalbecause the principal curvature directions of the pin and groovesurfaces are not the same. For this reason the values ofa andb have to be computed solving an elliptical integral. In [7] aprocedure to solve the problem by means of tables, is described.The values of curvature and of their principal directions can becomputed using the following expressions:
Den=12
(
1R11
+1
R12+
1R21
+1
R22
)
(4)
Num=12
[
(
1R11
− 1R12
)2
+
(
1R21
− 1R22
)2
+
+
(
1R11
− 1R12
)(
1R21
− 1R22
)
cos2ζ]
12
(5)
cosσ =NumDen
(6)
where cosσ is the input parameter to solve the elliptical integralby means of tables. The principal curvatures can be simply com-puted by means of the second differential form:
whereq(X) is a distributed load.6The stiffness of a linear spring which has the same deflectionunder the same
load of the nonlinear one.
L ·N−M2
E ·G−F2 = χ1χ2 , (7)
E ·N−2F ·M +G ·LE ·G−F2 = (χ1 + χ2) (8)
whereE,F,G,L,M andN are values depending on the parame-terization of the surface; for more details see [8,9].
As shown in Fig. 5, a shear load acts on the pin which hasa small length to diameter ratio. Thus shear loads cannot be ne-glected with respect to pin deflection. Therefore the loads on thepin tend to rotate each section of the device with respect to theothers. The Timoshenko beam element seems the appropriatechoice to represent the dynamic phenomena acting on the pin.Infact this type of element takes into account both the above men-tioned effects. Each boundary node of the Timoshenko beam hastwo degrees-of-freedom, translation and rotation, thus the dimen-sion of stiffness and mass matrices is four.
[K] =EI
(1+ φ)L3
12 6· lel −12 6· lel
6 · lel (4+ φ) l2el −6 · lel (2−φ) l2el
−12 −6 · lel 12 −6 · lel
6 · lel (2−φ) l2el −6 · lel (4+ φ) l2el
(9)
[M] =[
MρA]
+[
MρI]
(10)
for more details see Appendix A.The system to be solved for the dynamic behavior is the fol-
lowing:
[M]u+[C]u+[K]u = Fext (11)
It can be expressed in the following form to use RADAU5:
[
K]
Y′ =
P(t,Y)
, (12)
where
[
K]
=
[I ] [0] [0][0] [I ] [0][0] [0] [I ]
, (13)
5 Copyright c© 2004 by ASME

Y =
uuu
(14)
and
P(t,Y)
=
uu
[M]u−F (t,u)
(15)
F (t,u) = Fext− [C]u− [K]u . (16)
The valueFext include the load that the cam groove applies tothe pin; this load can be assumed to be:
[Kspring]s(t)−u , (17)
where
[Kspring] =
kspring
0kspring
0...
0
. (18)
The vectoru = u(t) represents the two degrees of freedomof each node; the translating coordinates of the vectors(t)−urepresent the deflection of the cam groove, the foundation. Thevectors(t) contains the movement impressed by the groove toeach node of the pin, while the vectoru the actual movement:the difference represent the deflection of the damping spring el-ements, thus the deflection of the groove.
u =
u1trans
u1rot
u2trans
u2rot...
u2nnodes
,s(t) =
h(θ(t))0
h(θ(t))0...0
(19)
d1
de
P1P2
β1i
β2e
γP
ldv1
d2
ldle
Figure 7. FORCES COMPONENTS DURING SYNCHRONIZATION (on
the left) AND MESHING DETAILS (on the right).
SIMULATION DETAILSIn order to understand the influence of different factors on
the performance of the gearbox a simulation of shifting processhas been executed. The entire system has been modeled takinginto account three different subsystems:
• interaction between barrel cam and pin;• synchronizing process;• meshing between dog teeth and gear.
The interaction between barrel cam and pin has been already dis-cussed in the previous section. When the cam rotates the sleeveis driven towards the synchronizer. This device is a conicalringwhich increases or decreases7 the speed of the gear to be meshedby means of friction force. This force, produced by axial thrustexerted by the sleeve, is proportional to the cam torque. Thesynchronizing torque can be computed using (see Fig. 7, on theleft):
Cs =Fs
sinαRsµd (ω,T) (20)
In order to avoid force discontinuities, the dynamic frictioncoefficient is [10]
µd = µ
(
1−e− |v|
v0
)
sign(ν) (21)
where v and v0 are respectively the sliding velocity and thethreshold sliding velocity values [4]. This approach is notac-curate at low or null speed.
During the synchronizing process the sleeve is halted by thelock up mechanism, a device which does not allow the sleeve
7According to the shifting operation: considering a gear mounted on the out-put shaft of the gearbox its speed has to be increased during the down-shift anddecreased during the up-shift.
6 Copyright c© 2004 by ASME

Figure 8. FORCES COMPONENTS DURING SYNCHRONIZATION (on
the left) AND MESHING DETAILS (on the right).
to move till the gear to be meshed reaches the same velocity asthe shaft on which it is mounted. This device hold the teeth ofthe sleeve and the synchronizer ring, face to face by mean of thefriction torque, and meshing is not possible. When the angularspeeds of the gear and the sleeve are synchronized, the frictiontorque diminish and the ring becomes free to rotate into the rightposition unlocking the sleeve.
When the sleeve is unlocked the dog teeth mesh with thegear. This phase is quite difficult to be simulated because itstartswith an impact and continues with other secondary impacts. Theshifting time depends slightly on these impacts which dependalso on the shape of the teeth and on inertial properties of com-ponents. When the sleeve comes into contact with the gear, theyboth have the same angular velocity thus there is only a linearvelocity. The sleeve is connected to the shaft. Hence it canbe considered as having a very high (or infinite) inertia. Dur-ing the meshing process the gear rebounds between the sleeveteeth. These impacts are modeled using the approach followedby Coutinho [11]. This model, which is developed for free bod-ies, can be specialized for one system taking into account theconstraints and the previous consideration about inertialproper-ties. After some computations [3] one obtains:
m1 (v1−V1)
tanβ1=
J2zz(ω2−Ω2)
Rim(22)
√e
(
12
m1v21 +
12
J2zzω22
)
=
(
12
m1V21 +
12
J2zzΩ22
)
(23)
For the first contact it is assumedβ1 = γ2.
The shape of the teeth and the point of the first contact isknown. In particular it can be assumed that the teeth of the sleeveand those of the gear have the worst relative position, i.e. faceto face. The best position should be when the teeth are aligned
for perfect meshing. To compute the time between two consecu-tive rebounds the following simplified procedure has been imple-mented, by means of the Eqn. (22), (23) and simple kinematichypotheses. The axial velocity of the sleeve between two re-bounds is assumed to be equal to that of the follower, assumedtobe a mean value as shown in Fig. 8. Therefore, one can evaluate:
• the velocity vector of the contact point,VA ;• the distance between the contact point and the point on the
sleeve surface that will be next contact point (on the inter-section between the trajectory of contact point and dog toothshape),di ;
• the time between two consecutive rebounds.
For this purpose, it is assumed:
ti+1 = ti +di
VA, (24)
where
di =ld −2le
cosα′ +sinα′ ·cotan(π
2 −β1i) , (25)
VA =√
Ω22R2
im +V21 , (26)
α′ =π2−β1i −β2e , (27)
β2e = tan−1(
Ω2Rim
v1
)
. (28)
where the meaning of the symbols is reported in the Nomencla-ture and in Fig. 7.
The Eqn. 26 evaluates the velocity between the teeth of thegear and those of the sleeve. It links the axial velocity and theangular velocity between the bodies after the first impact (de-pending onΩ2). The valuedi is measured in the direction ofapproach, i.e. the direction ofVA. The meshing phase is assumedto be completed when the sleeve dog teeth insert in the gear lat-eral teeth, thus whendi = 2l i (see Fig. 7, on the right).
The output data of the previous rebounds are used as inputdata for successive rebounds. In particular the axial velocity of
7 Copyright c© 2004 by ASME

Geari I II III IV V VI
zin 10 17 25 34 38 44
zout 38 36 34 33 29 27
ηi 3.8 2.118 1.36 0.970 0.736 0.614
Table 1. GEAR RATIO.
the sleeve is computed solving the dynamics of the system inFig. 8. The mobile support is the pin which drives the sleeve,by means of the beam. The masses of the fork and the sleeve islumped in the free massm. The motion law of the mobile sup-port,y(x), depends on the cam profile and is prescribed. There-fore the actual value of the sleeve velocity can be computed.
SIMULATIONS DATATo simulate the phases earlier illustrated, the geometrical
data have been measured on a real gearbox. The inertia datahave been estimated by means of CAD software. These valuesare required by the simulation procedure. Other input variablesof the program are chosen by the user, to investigate the changein the output performance.
To simulates a gearshift, the∆ω value, i.e. the shaft speeddifference between two consecutive gears, has to be known. Itcan be evaluated by means of:
∆ωi,i+1 =Vv
R0τp
(
1− τi
τi+1
)
(29)
where
τi =1ηi
=ωin,i
ωout,i=
zout,i
zin,i. (30)
Table 1 contains the values ofzin, zout andη for each gear ratio.Theτp value is
τp = 3.176.
Table 2 shows measured mass values for the gearbox com-ponents:
Geari I II III IV V VI
J[106kgm2] 25.4 88.4 354.7 520.7 720.8 987
J[106kgm2] 2875 1688 621.1 337.2 224.2 131
Table 3. GEAR MOMENT OF INERTIA.
Shaft Input Output
J[106kgm2] 806.7 1092
Table 4. SHAFT MOMENT OF INERTIA.
Geari Mass[kg]
VI (o.s.)8 0.21
V (o.s.) 0.29
IV (o.s.) 0.33
III (o.s.) 0.49
II (o.s.) 0.99
VI (i.s.) 0.86
Table 2. GEAR MASS.
The other values required for the simulation are the momentsof inertia of the gears and of the shaft, summarized in Tab. 3 and4, respectively. The last value is needed for the simulationsyn-chronizing process. In fact, the friction torque exerted bythe syn-chronizing ring reduce the speed difference between the wheel tobe meshed and the shaft on which it is mounted. The gear is con-nected to the input shaft, thus its moment of inertia has to beproperly computed taking into account the moment of inertiaofthe driven shaft.
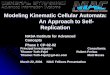
NUMERICAL RESULTSThe simulation has been performed in order to compare the
dynamic behaviors of the system, under different kinematiclawsexherted by the barrel cam. In particular the cycloidal and theconstant speed profiles have been investigated. We assume asconstant the cam angular speed, the maximum lift of the follower,the synchronizing force.
In Fig. 9 the pin speed versus simulation time for the twochosen cam profiles is presented. Three phases can be distin-guished in the graph. In the first one the cam pushes the pin
8The meaning of the acronym o.s., i.s. are:Output Shaft or Input Shaft andindicates the shaft where the gear is mounted on.
8 Copyright c© 2004 by ASME

Figure 9. PIN SPEED FOR DIFFERENT CAM PROFILES.
Figure 10. SLEEVE DISPLACEMENT FOR DIFFERENT CAM PRO-
FILES.
which is free to move. Therefore the difference between the twoprofiles can be clearly appreciated (I). The cycloidal profile re-quires more time for this phase. Consequently the synchroniz-ing process starts with a delay. At the beginning of this firstphase the cycloidal profile moves the sleeve at a slower velocitythan the constant speed one and, as known, with a smaller valueof acceleration. At the beginning of the second phase, the syn-chronization, the cycloidal profile imparts a higher speed to thesleeve. The duration of this second phase is not very much af-fected by the cam profile, although the cycloidal law is slightlyfaster than the constant speed one (II). The factor which most in-fluences the duration of the synchronizing phase is the geometryof the conical surfaces(α,Rs), their material (µd) and the syn-chronization force (Fs), as can be inferred from Eqn. 20. The
Figure 11. DETAIL OF OVERALL CONTACT FORCE AT THE BEGIN-
NING OF THE SYNCHRONIZATION PHASE.
third phase, the meshing of the gear, in the case of cycloidalpro-file, is smoother than the other one (III). The third phase startswith a collision. Thus,a small impact speed, as in the cycloidalprofile case, is preferred. The plots of sleeve displacementversustime (see Fig.10), for the two cam profiles, confirm the previousremarks. Regarding the interaction between pin and cam groove,during the second phase the overall contact force shows the be-haviour of a common cam with the same motion law. In fact theonly forces acting on the follower are those of inertia [12, 13].In Fig.11 the behaviour at the beginning of the synchronizationphase can be appreciated. The cycloidal profile generates anhigher contact force when the sleeve impacts the synchronizingring than does the constant speed profile.
As can be seen in Fig.11, the synchronization force applica-tion rate is high, but finite. This mean that the load is not trans-ferred immediately to the conical surface, but with a transientwith sliding.
The interaction force is not uniformly distributed along theportion of the pin which engages the groove. In Fig.12 the correctdistribution of the loads on the nodes (see scheme in Fig.5) atdifferent times is presented (x coordinate is measured from thefirst node of the pin).
The loads represented are sampled with a constant time stepof 5ms. This means that where the points are closer the loadchanges are slower.
The non-uniform distribution of loads, can also be appre-ciated. In particular the scheme of the force acting on the pin,produces an intensification of contact load around the first en-gaged section of the pin (section A Fig. 5). Obviously this zonewill have high wear.The wear can be esteemed as function of power losses accordingto Reye’s hypothesis :
9 Copyright c© 2004 by ASME

Figure 12. DISTRIBUTION OF THE LOADS ON THE NODES.
Figure 13. NON UNIFORM WEAR ALONG CAM GROOVE.
w = const· f · p ·vsliding (31)
wherevsliding andp vary with the node. The value ofvsliding canbe computed using:
vsliding =ω · rcosβ
, (32)
where
Figure 14. WEAR ALONG PIN DURING CAM ROTATION.
tanβ =dhdϑ
. (33)
The loadp along the nodes is plotted in Fig. 12.Figure 13 shows the change in shape of the cam groove. In
Fig. 14 the wear %9 during the contact is presented. The figureshows the volume of material taken away by friction. The resultsare normalized to the higher value, and plotted versus the coor-dinates of the nodes of the pin mesh, with the angle of rotation asparameter. For low values ofϑ, thus at the beginning of motion,wear action is very small. The reason for this is the low load act-ing in this phase between pin and groove. It can be seen that thecycloidal law seems better than the constant speed one, having alower value ofvsliding. This advantage is lost early. In fact, forhigher values of the angle of rotation, this speed becomes higherfor cycloidal profile, increasing the wear phenomenon. The ap-plication of the synchronizing force occurs with sliding and be-cause of the high load it is the most onerous phase w.r.t wear.This phase is represented by the last two curves (in the upperpart of the Fig. 13). Holding constant the maximum lift, the syn-chronizing force and the angular velocity, the cycloidal profilecompares unfavorably with the other because of the higher val-ues ofvsliding. There is no wear during the synchronization phasedue to the absence of sliding. A few percents difference indi-cates that the constant speed law is better than the cycloidal one.As already discussed in the introduction, a small improvement isalso important in order to give more reliability to the gearbox.
9
wear% =wear
wearmax.
10 Copyright c© 2004 by ASME

CONCLUSIONThe model developed and presented in this paper has per-
mitted an appropriate study of some operations in cam actuatedrobotized gearbox. It has made possible the investigation of theperformances of two cam profiles in terms of wear, kinematicand dynamic aspects. Although the dynamic response of the cy-cloidal profile is better than that of the constant speed, in termsof reliability the situation is different. The choice of thesim-ple constant speed profile reduces the cost of manufacturing. Inthe study of the gearbox for touring cars, using the synchroniz-ing meshing system, the time cannot be reduced to very smallvalues as in the gearbox using a dog ring. This means that to im-prove the performance of the gearbox, in terms of shifting time,it is necessary to reduce the time spent in the movement of thesleeve. This goal can be achieved by operating the cam at higherspeed, generating high wear of the part and reducing the relia-bility. The best way to reduce the shifting time is the use of thedog ring type gearbox, as in the racing car. No comfort resultsfrom this choice. This choice is not recommended for touringcars. The cheapest choice for companies is the automation ofthetraditional gearbox as shown in this paper. This has benefit forreliability and comfort. The model presented can be improved inthe simulation of the contact between the teeth of sleeve andgear.At this time it cannot fully reproduce all the complex dynamicsof the phenomena. The model simulates with high precision thephase of motion, that can be improved for better performance.The way to reduce the shifting time is with the choice of the ap-propriate motion law. However, this choice affects also wear anddynamic requirements.
REFERENCES[1] Yan, H. S., and Tsai, M. C., 1996, ”An Experimental Study
Of The Effects Of Cam Speeds On Cam-Follower Sys-tems”, Mechanism and Machine Theory,31 (4), pp. 397-412.
[2] E. Hairer and G. Wanner. Solving ordinary differen-tial equations II. Stiff and differential–algebraic problems.,volume 14 ofSpringer Series in Comput. Mathematics.Springer–Verlag, second revised edition, 1996.
[3] Stefanelli, R., 2003, ”Dinamica di Azionamento di un Cam-bio Automobilistico ad Innesto Desmodromico”, (in ital-ian) Degree Thesis in Mechanical Engineering Universityof Tor Vergata, Rome.
[4] Pennestrı, E., 2001, Dinamica Tecnica e ComputazionaleVol.1 (in italian). Casa Editrice Ambrosiana, Milano.
[5] Timoshenko, S.P., and Goodier, J.N., 1969, Theory of Elas-ticity, 3rd edition, McGraw Hill, NY.
[6] Juvinall, R.C., and Marshek, K.M., 1993, Fondamenti dellaprogettazione dei componenti, Edizioni ETS, Pisa.
[7] Gohar, R., 1988, Elastohydrodynamics. Ellis HorwoodLimited, Chichester, pp.49-57.
[8] Chakraborty, J. and Dhande, S.G., 1976, Kinematics andGeometry of Planar Cam Mechanism. John Wiley & Sons,New York.
[9] Pagani, C.D., and Salsa, S., 1991, Analisi Matematica Vol.2, MASSON.
[10] Threlfal, D.C., 1978, ”The Inclusion of Coulomb Frictionin Mechanism Programs”, Mechanism and Machine The-ory, 13, pp. 475-483.
[11] Coutinho, M.G., 2001, Dynamic Simulations of MultibodySystems. Springer, pp.205-218.
[12] Pennestrı, E., 2002, Dinamica Tecnica e ComputazionaleVol.2 (in italian), Casa Editrice Ambrosiana, Milano.
[13] Norton, R.L., 2002, Cam Design and Manufacturing Hand-book, Industrial Press, New York.
Appendix A: Timoshenko Beam ElementIn an earlier section the FEM mesh scheme of the cam-
follower system was presented. In particular the pin was dis-cretized by using a Timoshenko beam element for the reasonsshown.The mathematics of the model is briefly presented. Thesymmetric mass matrix is the following:
[M] =[
MρA]
+[
MρI]
[
MρA]
=ρ ·A · lel
210(1+ φ)2 ·
mρA(1,1)
mρA(2,1) mρA(2,2)
mρA(3,1) mρA(3,2) mρA(3,3)
mρA(4,1) mρA(4,2) mρA(4,3) mρA (4,4)
and
[
MρI]
=ρ · I ·
30(1+ φ)2
mρI (1,1)
mρI (2,1) mρI (2,2)
mρI (3,2) mρI (3,3) mρI (3,4)
mρI (4,1) mρI (4,2) mρI (4,3) mρI (4,4)
(34)
11 Copyright c© 2004 by ASME

mρI (1,1) =36lel
mρI (2,1) = mρI (1,2) = −(15φ−3)
mρI (2,2) =(
10φ2 +5φ+4)
lel
mρI (3,1) = mρI (1,3) = −36lel
mρI (3,2) = mρI (2,3) = (15φ−3)
mρI (3,3) =36lel
mρI (4,1) = mρI (1,4) = −(15φ−3)
mρI (4,2) = mρI (2,4) =(
5φ2−5φ−1)
lel
mρI (4,3) = mρI (3,4) = (15φ−3)
mρI (4,4) =(
10φ2 +5φ+4)
lel
(35)
mρA (1,1) =(
70φ2 +147φ+78)
mρA (2,1) = mρA(1,2) =lel
4
(
35φ2 +77φ+44)
mρA (2,2) =l2el
4
(
7φ2 +14φ+8)
mρA (3,1) = mρA(1,3) =(
35φ2+63φ+27)
mρA (3,2) = mρA(2,3) =lel
4
(
35φ2 +63φ+26)
mρA (3,3) =(
70φ2 +147φ+78)
mρA (4,1) = mρA(1,4) = − lel
4
(
35φ2 +63φ+26)
mρA (4,2) = mρA(2,4) = − l2el
4
(
7φ2 +14φ+8)
mρA (4,3) = mρA(3,4) = − lel
4
(
35φ2 +77φ+44)
mρA (4,4) =l2el
4
(
7φ2 +14φ+8)
(36)
where:
φ =EI
κGAlel
The stiffness matrix is given by the Eqn. 9. The use of thisbeam element permits us to take into account the shear actionon
the deformation and Fig. 15 shows an excellent agreement be-tween the theory of continuous elastic foundation and the FEMmesh chosen. The upper plot of the figure presents the share ofdeformation due to the shear action: it is clear that this contri-bution cannot be neglected because its magnitude is comparableto that due to the flexural acts. The lower plot shows the defor-mation of the beam under the same as in the previous case, butsimulated by the FEM model realized with Timoshenko beamelement
Figure 15. RESULTS OF DISCRETIZATION.
12 Copyright c© 2004 by ASME