Embed Size (px)
Citation preview

科学技術連携施策群の効果的・効率的な推進
補完的課題 事後評価
「ロボットタウンの実証的研究」
責任機関名:九州大学
研究代表者名:長谷川 勉
研究期間:平成 17 年度~平成 19 年度

目次
Ⅰ.研究計画の概要
1.研究の目的
2.研究の重要性・緊急性
3.研究計画
4.ミッションステートメント
5.研究全体像
6.研究体制
7.研究運営委員会について
Ⅱ.経費
1.所要経費
2.使用区分
Ⅲ.研究成果
1.研究成果の概要
(1)研究目標と目標に対する結果
(2)ミッションステートメントに対する達成度
(3)当初計画どおりに進捗しなかった理由
(4)研究目標の妥当性について
(5)研究計画・実施体制について
(6)研究成果の発表状況
2.研究成果:サブテーマ毎の詳細
(1)サブテーマ1 分散ビジョンシステムと環境の情報構造化に関する研究
(2)サブテーマ2 分散センシングとタグ配置に関する研究
(3)サブテーマ3 移動作業型ロボットを用いた電子タグ応
(4)サブテーマ4 情報構造化環境のマネジメント機構に関する研究
Ⅳ.実施期間終了後における取組みの継続性・発展性
Ⅴ.自己評価
1.目標達成度
2.情報発信
3.研究計画・実施体制
4.実施期間終了後における取り組みの継続性・発展性

1
Ⅰ.研究計画の概要
■プログラム名: 科学技術連携施策群の効果的・効率的な推進
■テーマ分類: 4 次世代ロボット-共通プラットフォーム技術の確立-
■課題分類名: 4-1 環境の情報構造化プラットフォームの基本モデルの研究開発
■課題名: ロボットタウンの実証的研究
■責任機関名: 九州大学
■研究代表者名(役職): 長谷川 勉(大学院システム情報科学研究科 教授)
■研究実施期間: 平成 17 年 11 月~平成 20 年 3 月
■研究総経費: 総額 154.0 百万円 (間接経費込み)
1.研究の目的
次世代ロボット技術は、少子高齢化社会のキーテクノロジーとして、IT やユビキタスコンピュータ技術、
ネットワーク通信技術、GPS、RFUD タグ技術などの関連技術と共に、急速に進歩してきている。この次世
代ロボット技術とそのさまざまな活用方法に対し、期待が高まってきている。ロボットが人間と共生して種々
の作業を行なうことを可能にするためには、ロボット自身が人間や動作環境を認識し、行動を決定できな
ければならない。しかし、ロボット単体での高機能化を目指すだけでは、様々な環境に適応することが困
難であることが次第に明らかになってきた。この問題を解決するためには、ロボットが環境に埋め込まれた
センサ等からの情報を活用し、動作できるような新しいフレームワークを構築しなければならない。(図 1)
同時にこの技術を社会全体で共有し、インフラとしての整備を図る必要がある。すなわち、
a. 環境側にプログラムや情報、知識を埋め込んだ環境情報構造化プラットフォーム技術の確立
b. 人間・ロボット共生社会のインフラ基盤整備と開発技術のオープン化・共有化が必要である。
本研究では、上記 a.と b.を実現することを目的とし、「環境の情報構造化プラットフォーム」の基本モデ
ルとして、環境センシング技術とタウンマネジメントシステム技術に焦点を当て、以下の研究を行う。
(1)ロボットの周囲状況を広域かつユビキタスにセンシングする分散ビジョンシステムと分散セ
ンサデバイス (2)多数の分散センサ群、ロボット群、人を含む移動体および地理情報、地理データベース等を
一括管理し、必要な情報をロボットに提供するマネジメントシステム
この研究を通して、次世代ロボットの共通プラットフォームとしての基本モデルとは何かを明らかにして
いく。さらに、実証実験を 終ターゲットとした研究開発を、大学、企業、地方自治体設置の外郭団体に
より実施する。これにより、ロボットルームからロボットタウンまで、スケールの異なる環境の情報構造化を
統一的に扱えるようになることを目指す。これは、工学や経済・産業分野だけではなく、生活一般に影響
を及ぼすものであり、社会的なコンセンサスを得るための基本となる。

2
分散センサ
従来技術 新技術
自律移動ロボット各個に外界センサを搭載 環境内に外界センサを埋込み,社会基
盤とする.付加的な環境情報も書込み
課題
・人間並みの外界センサは実現困難または高コスト
・全ての自律ロボットが等しく外界センサのセットを持つことは不可能
・ロボット積載の外界センサの動作の確実性が保証されない.
・個々の環境に適応した外界センサのチューニングが,別途必要.特徴
・社会基盤として遍く存在→ロボットの行動範囲拡大
・ロボット以外の移動体も利用可能
・ロボット産業と同時に新規情報産業も創出
・ビジョンセンサ
・超音波センサ
・熱センサ
・音センサ
・光センサ
・位置センサ
:
各種センサを搭載し,センサ情報処理だけで
手一杯の高機能自律移動ロボット
1.センシング
2.無線通信
3.自立電源
4.MPU制御
5.GPS/GIS情報
知的道路鋲
分散ビジョンシステム
電子タグ含む
図 1 環境の情報構造化によるロボット技術の新たな展開
2.研究の重要性・緊急性
研究の必要性:
汎用型ヒューマノイドの開発やロボット技術のモジュール化・オープン化により、ロボット単体としての技術
開発は、進んできている。一方、この進展にも関わらず、ロボットの実用化は進んでいない。人間との共生
環境で多様な作業を行なう次世代ロボットを実現するためには、環境の情報構造化によるロボットの行動支
援技術の研究が不可欠である。しかも、この研究には、実証実験が必須であり、実験フィールドの整備も要
求される。このため、民間主導での研究開発は、ほとんど実現困難である。従来の各府庁による研究開発
プロジェクトでも取り上げられていない。科学技術連携施策群でしか行なうことができない研究である。
国家的・社会的重要性:
次世代ロボット技術と他の機械技術との も大きな違いは、機械であるロボットの側から人間に対して
物理的に働きかけることにある。これによって、人間社会の生活を劇的に変化させることができる。しかし、
人間・ロボット共生社会を支える共通インフラ技術のグランドデザインを誤ると、極端に短期間なインフラ
寿命(コスト)、社会の安定と安全を脅かす不安定なインフラ(安定性)、ロボット優先のインフラ設計(目的
と手段の逆転)、環境改変による地球環境への負担(環境性)、といった様々な問題が生じる。本提案で
研究を行なう環境センシング技術とタウンマネジメントシステム技術は、このグランドデザイン設計におい
て大きな知見およびベースとなる技術である。
また、この共通プラットフォームは、次世代ロボット技術の信頼性を客観的に評価する土台である。環境
センシングにおけるインフラの保守性やプライバシーの保護、タウンマネジメントシステムによる安全かつ
安定な RT(ロボット技術)は、日本の独創的ロボット技術として,世界に情報発信すべきである。

3
研究の緊急性:
国内においては、少子高齢化の急速な進展により、様々な生活支援機能の提供が国や企業に求めら
れてきている。ロボット技術による社会へのサービスを実現するためには、個々の要素技術を発展させる
だけでなく、サービスを提供しようとする環境全体を整備し、早期にロボットシステムの共通基盤とすること
で、技術とコストを共有しなければ、立ち行かなくなるおそれがある。
また、国外においては、米国が軍事用にロボット技術を注力しているのに対し、近年、韓国やドイツ他
のヨーロッパ諸国が、民生用の次世代ロボット技術の国家的な研究開発プロジェクトを進めようとしている。
これに対抗するためには、ロボット技術の基盤技術を押え、かつ国際標準に対する提案能力を早急に保
持することが必要である。ロボット先進国である日本が世界をリードし、そのロボット産業が経済を支える基
幹産業となることを日本国民は期待している。
3.研究計画
「環境の情報構造化プラットフォーム」の基本モデルとして、人間の各種生活/活動をロボット技術によ
り支援するための環境センシング技術とタウンマネジメントシステム技術を研究する。この 2 つの技術は、
工学や経済・産業分野だけではなく、生活一般に影響を及ぼすものであり、社会的なコンセンサスを得る
ための基本ともなる技術である。本提案では、これらの研究を実証実験を 終ターゲットとし、大学、企業、
地方自治体設置の外郭団体により実施する。具体的には、4 つのサブテーマ毎に、研究実績のある研究
機関および責任者を配置し、研究項目を設定、研究を進める。そして、この研究成果を、2 つの実証実験
シナリオ、3 つの実験フィールドにより、実証実験を行い、共通プラットフォームとしての評価を行う。
環境の情報構造化プラットフォームは、ロボット技術と環境センシング技術、タウンマネジメント技術とか
ら構成される。
(1) ロボット技術では、移動機能とマニピュレーション機能を有する汎用ロボットを使用し、環境センシン
グ技術およびタウンマネジメントシステムと連携する新しいロボット制御技術を研究する。
(2) 環境センシングでは、2 つのテーマについて研究を行なう。1 つは、分散ビジョンシステムであり、もう
1 つは、各種センサおよび電子タグである。どちらも、環境に埋め込むことを前提として、環境構造物
やセンスする情報と環境との関係を考慮した研究を行う。
(3) タウンマネジメントシステムは、環境の情報構造化プラットフォームにおけるロボット群の位置や動作状
態の情報、分散センシングシステムから取得されるセンサ情報、環境内に埋め込まれた情報の管理と
通信の制御を行い、ロボットと人間を含む環境全体の制御をいかに行なうべきかについて研究を行う。
サブテーマの詳細は、以下の通りである。
サブテーマ 1:分散ビジョンシステムと環境の情報構造化に関する研究
環境の情報構造化において分散ビジョンシステムに求められている機能は、3 つある。1 つは、屋内
外での人間のロバストな検出と追跡である。2 つめは、ビジョンシステムのキャリブレーションと分散ビ
ジョンシステムの全体設計である。3 つめは、分散ビジョンシステムにより得られる環境の情報を適切に
管理する機構である。これらにより、人間との共存環境下でのロボットの行動支援を実現する。
サブテーマ 2:分散センシングとタグ配置に関する研究
電子タグを次世代ロボットのための環境の情報構造化に用いる場合、電子タグが添付される物体自
体の情報や環境内での位置情報の取得と同時に、この情報を用いて、いかにロボットを動作させるか
が重要となる。電子タグおよび分散センサの配置状態やそこから得られる情報は、病院や住宅など、対
象環境の性質に大きく依存する。環境の違いによる分散センサとタグの配置計画およびロボットの制御

4
との関連について研究を行う。
サブテーマ 3:移動作業型ロボットを用いた電子タグ応用
物体操作や障害物検知、回避などの自律移動機能を有する屋内作業移動型ロボットを生活支援に
用いるための 2 つの問題について研究を行う。すなわち、自律移動のための地図情報構築における電
子タグの応用、およびマニピュレーションのための作業対象物認識における電子のタグ応用である。
サブテーマ 4:情報構造化環境のマネジメント機構に関する研究
環境に分散配置されたセンサ、メモリからの情報管理及び、その情報を基にした自律ロボットの行動
制御を実現するマネジメント機構について研究を行う。特に、実験シナリオに沿って、環境センサとロ
ボットとが連携する際のサービスの記述方法および全体制御を行なう標準モデルの研究を進める。こ
れに基づいてマネジメントシステムを試作し、実証実験を通して、上記サービスの記述方法や標準モデ
ルについて問題点の解明とその解決策を開発する。
図 2 4 つのサブテーマと環境の情報構造化
a.実証実験シナリオ:
実証実験シナリオは、「環境の情報構造化」基盤技術の検証だけでなく、共通プラットフォーム
としての妥当性の検証にも用いる。この妥当性の基準として 1)ニーズ、2)安全性、3)インフラ整備、
の 3 つとする。
先ず、1)については、病院内での患者の移動支援、および通院患者の在宅支援と通院支援とを対象
に実証実験シナリオを設定する。なお、このニーズは、厚労省「病院報告(平成 16 年)」や「介護サービス
施設・事業所調査結果報告(平成 16 年)」に基づいて選択している。2)の安全性については、ロボットシス
テムが運用される際の安全性だけでなく、新技術導入の際の安全性に関する対策および制度整備につ
いて検討する。3)のインフラ整備については、総務省、国交省など他府省主導で行なわれた人間支援を
分散ビジョンシステム
歩行者検出位置・運動計測
自動車検出 位置・運動計測
歩行者・自動車情報に基づく支援
ロボット 状況監視
環境地図管理 ロボット群稼働状況の管理環境内移動体発見と動向の監視
自己位置計測
周囲状況 問合せ
分散センサ/RFIDタグ
マネジメントシステム
ロボット
/知的車イス

5
目的としたネットワークインフラ技術の実証実験の成果を援用する。これにより、ロボットの行動支援と人間
支援を両立させたインフラ整備を行う。
(1)実証実験シナリオ 1:病院内自立移動支援
病院における患者の も一般的な行動、すなわち、外来患者の来院から受付、診察、会計、退出ま
での各移動をロボットにより支援する。移動ロボット(または知的車イス)は、玄関や受付、診察室、待合
室などの病院内の位置情報、経路上に現れる人や障害物の情報、診察・検査・会計・薬剤処方等の手
続きの順序の情報等を、環境センシングとマネジメント機構が提供する病院情報から獲得し、自律的に
移動する。このシナリオを通して、各種制約のある病院環境下での環境センシングとインフラ整備、マ
ネジメント機構の構築とロボット制御について研究を行う。
(2)実証実験シナリオ 2:住居内外での自立移動支援
情報構造化された環境下での、ロボットによる在宅(通院)患者を対象とした生活支援を行う。服薬指
導や食事療法につながるマニピュレーションによる支援、自立移動支援を実現するために、環境セン
シングとインフラ基盤整備、環境情報および在宅治療・リハビリを反映したロボット制御を実現するマネ
ジメント機構についての研究を行う。
b.実験フィールド:
実験のための模擬環境ではなく、実際の病院および住宅を使用する。病院環境としては、医療用ロ
ボットの共同研究で実績のある九州大学付属病院の協力を得て、実験を行う。また、住宅内や道路など
の任意の位置に電子タグやビジョンセンサなどを設置するために、新規造成地(福岡市アイランドシティ)
内一角の住宅内及びその周辺を実験フィールドとする。また、他の研究グループへの実験フィールドの
公開と共同研究を容易にするしくみを準備する。このほか、地下街やビルといった人工構造物環境での
自立移動支援の実験を行う(福岡市集客施設ロボスクエア)。
ロボスクエア
九州大学付属病院
アイランドシティ住宅地区
福岡県福岡市 九州
図 3 実験フィールド

6
4.ミッションステートメント
環境センシング技術と環境情報を制御・管理するマネジメント技術からなる環境情報構造化プラット
フォームのモデル化とオープン化の実現及び、プラットフォーム上でのロボットを用いた実験シナリオで
ある(1)モデル住宅での生活支援、(2)病院内での移動支援の実証。
5.研究全体像
オフィスや病院、道路などの公共空間、あるいは住宅などの日常生活環境で人のために様々な軽作
業を行うサービスロボットを実現するには、ロボットに搭載された機能だけで複雑な周囲状況を認識する
のではなく、環境側にセンサネットワークや様々な情報を格納したマーカを配置して、ロボットを支援する
仕組みが不可欠である。本研究では、この仕組みの構築を環境情報構造化と定義し、そのプラットフォー
ムの開発を行う。
研究の全体像を図4に示す。人間が日常生活をしている街区に、ビジョンカメラを分散配置し、視野内
のロボットや歩行者などの移動体の位置や姿勢、運動方向を計測する。また、歩道路面や側壁面あるい
は建物内部にはRFIDタグやセンサを分散配置する。これら環境中に分散配置された多数のセンサから
の情報はタウンマネジメントシステム(TMS)と呼ばれる情報管理機構が一元管理し、さらにその情報をロ
ボットへ供給する。ロボットはTMSにアクセスすることで、人やロボットの位置、地図情報や埋込タグに関す
る情報など作業に必要な基本的な環境情報を取得できる。このようにして環境情報構造化を実現するロ
ボット開発のためのプラットフォームを「ロボットタウン」と呼び、その開発を行う。
住宅内外における生活支援実験
ロボットタウン:ロボットが人と共生しながら働く街
情報構造化店舗/建造物(コンビニ,レストラン,病院,薬局等)・ICタグ,センサ,屋内地図
タウンマネジメントセンタ
GPS
分散ビジョンシステム
知的シニアカー/ロボットカー
知的道路鋲
屋外無線LAN施設
ICタグ
病院における移動支援実験
図 4 ロボットタウンの全体像

7
6.研究体制
図5に研究体制を示す。各参加機関の分担は以下のとおりである。
(1) 九州大学:ロボットタウンのコンセプトを実現するための基本設計ならびに分散ビジョンシステムの
開発と全体の統括
(2) 九州システム情報技術研究所:ロボットタウンのコンセプトを実現するための基本設計ならびに分
散センサシステムの開発と実証実験のとりまとめ
(3) 九州日本電気ソフトウェア(株):分散配置された電子タグ、センサ、メモリからの情報管理及びその
情報を基にした自立的移動ロボットの行動制御を行うマネジメントシステムの開発
(4) (株)安川電機:移動作業型ロボットによる生活支援技術の開発と実験
図 5 研究体制

8
実施体制一覧
研 究 項 目 担当機関等 研究担当者
1. 分散ビジョンシステムと環境の情報構造
化に関する研究
(1) 屋内外でのロバストな人間検出・追跡に
関する研究
(2) セルフキャリブレーションと分散ビジョン
システム設計に関する研究
(3) 分散ビジョンシステムによる環境の情報
の管理・制御に関する研究
2. 分散センシングとタグ配置に関する研究
(1) 環境内タグ配置とロボットの自律位置同
定に関する研究
(2) 環境内タグ配置とロボットの自律位置同
定に関する研究
(3) 屋外移動支援におけるタグ配置問題に
関する研究
3. 移動作業型ロボットを用いた電子タグ応用
(1) ロボットの移動に関する電子タグの応用実証
(2) ロボットの作業に関する電子タグの応用実証
(3) 移動型作業ロボットに関する電子タグの応用
実証
4. 情報構造化環境のマネジメント機構に関
する研究
(1) 情報構造化環境の標準的な管理プラッ
トフォームに関する研究の推進、妥当性
確認
(2) ロボットが環境情報を有効活用する為
の標準システム確立に関する研究
(3) 環境情報を活用したロボットのマネジメ
ントシステム実現に関する研究
九州大学大学院システム情報科学
研究院(中核機関)
九州大学大学院システム情報科学
研究院(中核機関)
九州大学大学院システム情報科学
研究院(中核機関)
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
(株)安川電機
(株)安川電機
(株)安川電機
九州日本電気ソフトウェア(株)
九州日本電気ソフトウェア(株)
九州日本電気ソフトウェア(株)
◎長谷川 勉
谷口 倫一郎
倉爪 亮
内田 誠一
村上 剛司
岩下 友美
木室 義彦
森光 武則
松本 三千人
家永 貴史
千田 陽介
寺岡 章人
松岡 毅
田中 完爾
財部 修平
横矢 剛
横山 和彦
白石 一成
包原 孝英
中村 高幸
千々和 淳
岸 泰生
前澤 宏之
永松 良之
馬場 伸一
吉垣 伸介
田中 吉孝
島津 晃
丸山 博史
黒瀬 光彦
山神 由郎
◎ 代表者

9
7.研究運営委員会について
研究運営委員会委員一覧
氏名 所属機関 役職
(研究実施者)
◎長谷川 勉 九州大学大学院システム情報科学研究院 教授
谷口 倫一郎 九州大学大学院システム情報科学研究院 教授
倉爪 亮 九州大学大学院システム情報科学研究院 教授
内田 誠一 九州大学大学院システム情報科学研究院 教授
村上 剛司 九州大学大学院システム情報科学研究院 助教
岩下 友美 九州大学大学院システム情報科学研究院 助教
木室 義彦 (財)九州システム情報技術研究所
(経済産業省九州経済産業局)
室長
森光 武則
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
次長
有田 大作
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
研究員
家永 貴史
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
研究員
千田 陽介
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
研究員
寺岡 章人
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
特別研究員
松岡 毅
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
特別研究員
田中 完爾
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
特別研究員
財部 修平 (財)九州システム情報技術研究所
(経済産業省九州経済産業局)
研究員補助職員
横矢 剛
(財)九州システム情報技術研究所
(経済産業省九州経済産業局)
研究員補助職員
橋爪 誠 九州大学 大学院医学研究院 教授
横山 和彦 (株)安川電機 技術担当部長
白石 一成 (株)安川電機 技術担当係長
足立 勝 (株)安川電機 技術担当係長
中村 高幸 (株)安川電機 研究開発員
千々和 淳 (株)安川電機 研究開発員

10
岸 泰生 (株)安川電機 研究開発員
馬場 伸一 九州日本電気ソフトウェア(株) シニアマネージャー
吉垣 伸介 九州日本電気ソフトウェア(株) マネージャー
田中 吉孝 九州日本電気ソフトウェア(株) マネージャー
丸山 博史 九州日本電気ソフトウェア(株) 主任
黒瀬 光彦 九州日本電気ソフトウェア(株) 主任
殷 中翔 九州日本電気ソフトウェア(株)
山神 由郎 九州日本電気ソフトウェア(株)
(外部有識者)
杉本 旭 長岡技術科学大学 教授
越塚 登 東京大学 准教授
神徳 徹雄 産業技術総合研究所知能システム研究部門 主任研究員
石松 毅彦 北九州市産業学術振興局新産業課 主幹
北嶋 昭三 福岡市経済振興局産業政策部新産業課 課長
神谷 昌秀
福岡県商工部新産業技術振興課新産業
プロジェクト
室長
餅田 祐輔 経済産業省九州経済産業局地域経済産業部 部長
小林 陽一 総務省九州総合通信局無線通信部 部長
大竹 暁 文部科学省研究振興局基礎基盤研究課 課長
田原 康生 総務省情報通信政策局研究推進室 室長
高橋 泰三 経済産業省製造産業局産業機械課 課長
◎研究運営委員長
運営委員会等の開催実績及び議題
(a) 運営委員会
第一回(平成 18 年 2 月 22 日) 於:福岡 SRP センタービル(福岡市)
議題:研究の進捗管理
・研究の内容と方法、および進捗状況を報告し、質疑応答を通して、その妥当性を確認した。
第二回(平成 19 年 1 月 26 日) 於:アクロス福岡(福岡市)
議題:研究の進捗管理
・研究進捗状況を報告し、当初計画に対する計画変更や目標値の変更はないことを確認した。
・開発するプラットフォーム(ロボットタウン)により実現される具体的なアプリケーションシナリオを
作成し、プロジェクト期間内に実証することを決定した。

11
第三回(平成 20 年 1 月 25 日) 於:福岡ビジネス創造センター(福岡市)
議題:研究の進捗管理,研究成果の公開
・研究進捗状況および、開発したプラットフォーム(ロボットタウン)におけるロボットサービスの実
証実験に関して報告した。
・プロジェクト成果として、ソフトウェア(TMS)とハードウェア(実験環境)を公開することを報告した。
(b) 研究成果報告会
第一回(平成 19 年 1 月 26 日) 於:ロボスクエア(福岡市)
一般公開の研究成果報告会を開催し、プロジェクトの進捗状況を報告すると共に,開発中のプラット
フォーム(ロボットタウン)において公開ロボット実証実験を行った。 参加者は約 60 名であった。
第二回(平成 20 年 1 月 25 日) 於:福岡ビジネス創造センター(福岡市)
一般公開の研究成果報告会を開催し、プロジェクトの進捗状況を報告すると共に、開発したプラット
フォーム(ロボットタウン)において公開ロボット実証実験を行った。また、プロジェクト成果として公開す
るプラットフォームの紹介を行った。参加者は約 60 名であった。

12
Ⅱ.経費
1.所要経費(直接経費のみ) (単位:百万円)
所要経費
研 究 項 目 担当機関等 研 究
担当者 H17年度
H18 年度
H19 年度
合計
1. 分散ビジョンシステムと環境
の情報構造化に関する研究
(1) 屋内外でのロバストな人間
検出・追跡に関する研究
(2) セルフキャリブレーションと
分散ビジョンシステム設計に
関する研究
(3) 分散ビジョンシステムによる
環境の情報の管理・制御に関
する研究
2. 分散センシングとタグ配置に
関する研究
(1) 環境内タグ配置とロボットの
自律位置同定に関する研究
(2) 環境内タグ配置とロボットの
自律位置同定に関する研究
(3) 屋外移動支援におけるタグ
配置問題に関する研究
3. 移動作業型ロボットを用いた
電子タグ応用
(1) ロボットの移動に関する電
子タグの応用実証
(2) ロボットの作業に関する電
子タグの応用実証
(3) 移動型作業ロボットに関す
る電子タグの応用実証
4. 情報構造化環境のマネジメン
ト機構に関する研究
(1) 情報構造化環境の標準的
な管理プラットフォームに関す
る研究の推進、妥当性確認
(2) ロボットが環境情報を有効
活用する為の標準システム確
立に関する研究
(3) 環境情報を活用したロボット
のマネジメントシステム実現に
関する研究
九州大学大学院
システム情報科学
研究院
九州大学大学院
システム情報科学
研究院
九州大学大学院
システム情報科学
研究院
(財)九州システム
情報技術研究所
(財)九州システム
情報技術研究所
(財)九州システム
情報技術研究所
(株)安川電機
(株)安川電機
(株)安川電機
九州日本電気ソフ
トウェア(株)
九州日本電気ソフ
トウェア(株)
九州日本電気ソフ
トウェア(株)
長谷川 勉
谷口倫一郎
倉爪 亮
内田 誠一
村上 剛司
岩下 友美
木室 義彦
森光 武則
松本三千人
家永 貴史
千田 陽介
寺岡 章人
松岡 毅
田中 完爾
財部 修平
横矢 剛
横山 和彦
白石 一成
包原 孝英
中村 高幸
千々和 淳
岸 泰生
前澤 宏之
永松 良之
馬場 伸一
吉垣 伸介
田中 吉孝
島津 晃
丸山 博史
黒瀬 光彦
山神 由郎
7.0
5.7
3.4
3.0
8.0
11.0
10.8
20.0
5.5
13.8
10.3
20.0
20.5
30.5
24.5
43.0
所 要 経 費 (合 計) 19.1 49.8 49.6 118.5

13
2.使用区分
(単位:百万円)
サブテーマ1 サブテーマ2 サブテーマ3 サブテーマ4 計
設備備品費 7.9 2.6 5.7 0.0 16.2
試作品費 0.0 0.0 1.8 0.0 1.8
人件費 0.0 17.4 14.7 41.0 73.1
業務実施費 12.6 10.5 2.3 2.0 27.4
間接経費 6.1 9.2 7.3 12.9 35.5
計 26.6 39.7 31.8 55.9 154.0

14
Ⅲ.研究成果
1.研究成果の概要
環境に分散配置されたセンサを用いて環境情報を計測する環境センシング技術と、環境情報を制御・
管理するマネジメント技術を開発し、環境情報構造化プラットフォームのモデル化を行った。開発した環
境センシング技術とマネジメント技術を適用して、福岡市博多湾内の人工埋立地「アイランドシティ」にあ
る一戸建て住宅の内部とその周辺区域、および福岡市内の九州大学病院において、環境構造化プラット
フォームを整備すると共に、それを用いた人間共生ロボットによる実証実験を行った。
実証実験は本研究開発で策定した 3 つのロボットサービスシナリオに沿って実施された。ロボットは、 (a)
利用者の衣服の準備を行う住宅内生活支援サービス、(b) 利用者の呼び出しに応じて移動支援を行う屋
外移動支援サービス、および(c) 利用者への診察情報の提示や診察室への案内を行う病院内移動支援
サービスの 3 つのサービスを、環境情報構造化プラットフォームから情報支援を受けることで実現できた。
整備した環境情報構造化プラットフォームをロボットタウンとして公開するため、プラットフォームの利用
マニュアル、サンプルプログラム、ソフトウェアインストーラなどを整備した。
(1)研究目標と目標に対する結果
① 研究開始後 1 年目の目標:
(a)分散ビジョンシステムと環境の情報構造化に関する研究
高解像度 CCD デジタルカメラとレーザレンジファインダを組み合わせた、屋内外でのロバストな移
動体(人間)の検出・追跡システムを構築する。また自動追尾トータルステーションを用いた移動ロボッ
トの高精度位置同定システムを実現し、構築したセンサシステムの自動セルフキャリブレーションを実
現する。
(b)分散センシングとタグ配置に関する研究
分散センシング及び電子タグに関して、環境内の配置や計測範囲、環境からの要求仕様、デバ
イスの性能を含めた基本モデルを設計する。
(c)移動作業型ロボットを用いた電子タグ応用
市販の電子タグリーダ/ライタ(電子タグ装置)を台車やロボットに搭載した基礎実験を行い、電
子タグ装置をロボットに搭載した場合の課題を抽出する。
(d)情報構造化環境のマネジメント機構に関する研究
ロボットが環境情報を有効活用できるサービス記述、システムモデルの標準確立の為、先ずは参
考となる各種既存技術の成果や標準を広く収集、整理、分析し、今回確立する標準に対する要求を
明確化する。また、そのマネジメントシステムを実現する為、各種既存実装技術を広く収集、整理、
分析し、マネジメントシステムの実装方式や試作の方向性を検討する。本課題における環境情報関
連の他サブテーマとの整合性確保、本サブテーマにおける標準サービス・モデルの確立方法及び
そのマネジメントシステムの実装方式についての妥当性確認なども行う。
結果:
タウンマネージメントシステム(TMS)から環境情報(測位情報、環境地図、etc.)の提供を受け、ロ
ボットは人間と共生して多様な作業を実行する。その具体例として、住宅内および病院内における
実証実験シナリオを策定した。住宅内作業シナリオは、1)移動機構を有する双腕ロボットによる物
品の搬送作業であり、病院内作業シナリオは、2)電動車椅子ロボットによる外来患者の移動支援作
業である。各シナリオの文脈の下で、環境情報のセンシング技術(分散ビジョン、RFID タグ、etc.)の
研究と、移動ロボットの整備を行った。また、TMS の概念設計を行って、TMS の構成要素と TMS が
提供する機能を整理した。各シナリオで必要とされる機能を TMS が提供できることを検証し、TMS
の概念設計の妥当性を確認した。

15
② 研究開始後 2 年目の目標:
(a)分散ビジョンシステムと環境の情報構造化に関する研究
デジタルカメラを用いた移動体(人間)の検出・追跡システムについて、照明変化や遮蔽などに対
する頑健性を高める手法を開発する。また単一カメラの視野ではとらえることのできない移動体の継
続的追跡を可能とする複数ビジョンの連携手法を開発する。
(b)分散センシングとタグ配置に関する研究
環境センシングの基本モデルに沿って、分散センシングにおけるデバイスの屋外自律動作とセン
サ機能を実現する。また、マネジメント機構との接続機能を実現する。
(c)移動作業型ロボットを用いた電子タグ応用
前年度に抽出した課題を解決する方策を検討し、その方策に基づいた改造をロボットに施して、
有効性を検証する。
(d)情報構造化環境のマネジメント機構に関する研究 参考となる各種既存技術の成果や標準を広く収集、整理、分析し、ロボットが環境情報を
有効活用できるサービス記述、ならびにシステムモデルの標準の枠組みを定義する。また、
そのマネジメントシステムを実現する為、本課題における環境情報関連の他サブテーマとの
整合性を確保しながら、実装方式や試作についても検討を実施する。 結果:
環境情報構造化プラットフォームであるロボットタウンの主な技術要素、すなわち 1)環境情報の
センシング技術(分散ビジョン、電子タグ、etc.)、 2)環境情報を制御・管理するマネジメント技術、
3)移動ロボットのそれぞれについての実績は以下のとおりである。なお、昨年度の設計に基づいて
実装を行った。
1)環境情報のセンシング技術:環境内に分散配置されたデジタルカメラとレーザレンジファイ
ンダを組み合わせ、隠れに頑健かつ、移動体が個々のセンサのセンシング領域間を移動する
場合にも一貫した追跡が行える分散ビジョンシステムを開発した。また、電子タグを用いた
ロボットの自己位置同定を行ううえで効果的なタグの設置法を調査した。 2)環境情報を制御・管理するマネジメント技術:環境に埋め込まれたセンサ群とロボットとの間で情報
の受け渡しを行うための情報管理機構であるタウンマネジメントシステム(TMS)の設計を完了すると
共に、一部機能の実装を行った。未実装の部分に起因する機能制限はあるものの、TMS の運用を
開始できた。
3)移動ロボット:プラットフォームの機能検証用のロボットとして、車いす型ロボット、双腕作業ロボット、
車輪型移動ロボットの整備を行った。環境内に埋め込まれた電子タグを効率的に読み出すために
は、ロボットのどの部位にタグリーダを取り付ければよいかなど、情報構造化環境で効率的に情報
を収集するための要件を調査し、ロボットの整備に反映させた。
開発した分散ビジョンシステムおよび移動ロボットと TMS との接続テストを行い、分散ビジョンシステムと
ロボット間の情報受け渡しが TMS を介して行えることを確認した。また、ロボットタウンの運用上の課題で
ある、 a)環境内に分散配置されるカメラ群の定期的なキャリブレーションと、 b)環境内に設置された電子
タグの ID と位置座標とのテーブルの更新について、ロボットを用いて自動化する手法を開発した。
これらの成果を適用して、福岡市の博多湾埋め立て地「アイランドシティ」内の中央公園一角にある一
戸建て住宅の内部および周辺区域を対象にして環境情報構造化を進めると共に、環境情報化プラット
フォーム:ロボットタウンの運用実験を行い、開発した要素技術の検証と課題の抽出を行った。

16
③ 研究開始後 3 年目の目標:
(a)分散ビジョンシステムと環境の情報構造化に関する研究
分散ビジョンシステムをタウンマネジメント機構に統合して、ロボットを用いた実験シナリオにより、
その機能検証を行う。
(b)分散センシングとタグ配置に関する研究
タグをベースとした環境センシングを、タウンマネジメント機構に統合し、ロボット移動実験を通じ
て、技術の検証を行う。
(c)移動作業型ロボットを用いた電子タグ応用
タウンマネジメント機構のもとで、設定した住宅内実証実験シナリオにそって作業実験を行い、環
境構造化プラットフォームの機能を実証する。
(d)情報構造化環境のマネジメント機構に関する研究
タウンマネジメント機構を実装し、ロボット制御実験により環境構造化プラットフォームの機能を実
証する。
結果:
開発した環境センシング技術および環境情報を制御・管理するマネジメント技術を用いて、環境
情報構造化プラットフォームを整備すると共に、このプラットフォーム上で人間共生ロボットによるロ
ボットサービス実証実験を行って、環境センシング技術、マネジメント技術、および環境情報構造化
プラットフォームの機能を検証した。また、環境情報構造化プラットフォームを利用するためのドキュ
メント類、サンプル、インストーラなどを整備した。
サブテーマ毎の成果概要を以下に示す。
(a)分散ビジョンシステムと環境の情報構造化に関する研究
ロボットや人間などの移動体追跡を行う分散ビジョン・レーザシステム、人間の動作推定を行う分
散ビジョンシステム、およびロボットの位置を高精度に計測する屋内 GPS システムを開発して、タウン
マネジメント機構に統合した。実験を通して開発したシステムの機能検証を行い、その有効性を確認
すると共に、これらのシステムを環境に設置することで環境情報構造化が実現できることを示した。
(b)分散センシングとタグ配置に関する研究
平成 18 年度に実現した、分散センシングにおける デバイスの屋外自律動作とセンサ機能を基
に、タグをベースとした環境センシングをタウンマネジメント機構に統合し、ロボット移動実験を通じ
て、技術の検証を行った。これらの技術を用いた公開実験を実施した。
(c)移動作業型ロボットを用いた電子タグ応用
まず双腕ロボットと搬送ロボットに対して、実証シナリオを実現するために必要な改作を行った。
次にロボットを制御するために必要なソフトウェアを開発した。準備したロボットと制御ソフトを利用し
て、作業、移動の観点から TMS や電子タグを応用した機能の開発を行った。そして開発した機能
を統合したシナリオを作成し、それに基づいたアプリケーション開発・デモを行うことで、TMS や電
子タグといった環境知能の有効性を実証した。
(d)情報構造化環境のマネジメント機構に関する研究
前年度の研究成果に踏まえて TMS の改良と機能拡張を行い、多種類のロボット、環境センサ
との接続実験により、環境構造化プラットフォームとしての機能を実証した。また、ドキュメント類、サ
ンプル、インストーラなどを作成し、研究成果を外部へ提供するための環境を整備した。

17
(2)ミッションステートメントに対する達成度
まず、環境に分散配置されたセンサを用いて環境情報を計測する環境センシング技術と、環境情報を
制御・管理するマネジメント技術を開発して、環境情報構造化プラットフォームのモデル化を行った。次に、
環境センシング技術とマネジメント技術を適用して、一戸建て住宅の内部とその周辺区域、および九州大
学病院において、環境構造化プラットフォームを整備した。ロボット実験シナリオとして、(1)利用者の衣服
の準備を行う住宅内生活支援サービスシナリオと、(2)利用者への診察情報の提示や診察室への案内を
行う病院内移動支援サービスシナリオ、および(3)利用者の呼び出しに応じて移動支援を行う屋外移動支
援サービスシナリオを策定し、環境情報構造化プラットフォーム上において人間共生ロボットによる実証
実験を行った。
また、整備した環境情報構造化プラットフォームをオープン化し、ロボットタウンとして公開するため、プ
ラットフォームの利用マニュアル、サンプルプログラム、ソフトウェアインストーラなどを整備した。
これらの成果により、ミッションステートメントを達成することができた。
(3)当初計画どおりに進捗しなかった理由
該当なし
(4)研究目標の妥当性について
オフィスや病院、道路、あるいは住宅などの生活環境で人のために様々な軽作業を行うサービスロボッ
トを実現するためには、環境側にセンサネットワークや様々な情報を格納したマーカを配置してロボットを
支援する仕組みが求められる。本研究課題では、この仕組みの構築を環境情報構造化と定義し、そのプ
ラットフォームの開発および、そのプラットフォーム上でロボットによる住宅内生活支援サービスや病院内
移動支援サービスを実現することを目標に設定した。
この目標は、課題提案時における、環境情報構造化技術に関する国内外の研究状況や、ロボットに求
められる社会的役割に関する予測を踏まえて設定したものである。現時点における、環境情報構造化技
術への注目の高さや、高齢者介護など生活環境へのサービスロボット導入に対する社会的な要求の高ま
り、および次世代の基幹産業としてのロボット技術への期待などの社会的要求に、設定した目標は合致し
ている。
以上より、設定した目標は妥当であったと言える。
(5)研究計画・実施体制について
研究計画の妥当性を得るため、技術調査会を実施して有識者からの指導を受けた。技術調査会では、
東京大学の佐藤知正教授から環境情報構造化技術に関して、芝浦工業大学の水川真教授からロボット
技術の標準化活動に関して講演頂いた。また、ロボットの安全性に関して、長岡技術科学大学の杉本旭
教授の指導を受けた。
研究内容と進捗に関して外部有識者による評価と指導を受けるための場として、研究運営委員を設置
して、毎年度の研究進捗管理を行った。研究運営委員会には、研究者のほか、県と市などの地元自治体
および省庁からロボット関連施策担当者に参加頂き、本研究課題とロボット振興に係わる行政諸施策との
連携を取った。
公共空間、特に病院にロボットを導入する際には、倫理・安全面への対応が強く求められるため、九州
大学病院におけるロボット実証実験は、九州大学病院の倫理審査委員会による倫理・安全に関する承認
を受けて実施した。

18
(6)研究成果の発表状況
1)研究発表件数
原著論文発表
(査読付)
左記以外の誌面発表 口頭発表 合計
国 内 5 件 該当無し 53 件 58 件
国 外 該当無し 該当無し 8 件 8 件
合 計 5 件 該当無し 61 件 66 件
※ 国内の出版社の英文誌は「国内」とする。
※ 国内で開催された国際会議は「国外」とする。
2)特許等出願件数: 1 件
3)受賞等:
該当なし
4)原著論文(査読付)
【国内誌】(国内英文誌を含む)
① 長谷川勉:「ロボット技術の未来 -日常生活環境で人間と共生し役に立つロボットを目指して-」,Re,
Vol.155,pp.5-10,(2007)
② 倉爪亮,戸畑享大,村上剛司,長谷川勉:「CPS-SLAM の研究 大規模建造物の高精度 3 次元幾何
形状レーザ計測システム」,日本ロボット学会誌, Vol.25, No.8, pp. 90-98, (2007)
③ 長谷川勉:「ロボットタウンプロジェクト:日常生活環境の情報構造化」,ロボット,181 号,(2008)
④ 村上剛司,長谷川勉,木室義彦,千田陽介,家永貴史,有田大作,倉爪亮:「情報構造化環境にお
ける情報管理の一手法」, 日本ロボット学会誌, Vol.26, No.2, pp.192-199, (2008)
⑤ 千田陽介, 木室義彦, 財部修平, 長谷川勉:「配置不明なタグを用いた自己位置推定」,電気学会
論文誌 C 編, Vol.128-C, No.7, (2008)
5)その他の主な情報発信(一般公開のセミナー、展示会、著書、Web 等)
① Web 公開:「ロボットタウンの実証的研究」, http://fortune.is.kyushu-u.ac.jp/robottown/, 2006.5
② 一般公開セミナー:「総合科学技術会議 科学技術連携施策群 次世代ロボット連携群 第 3 回講演
会 次世代ロボット共通プラットフォーム技術 -ロボットタウンの実証的研究-」, ロボスクエア(福
岡市),2007.1.26
③ 一般公開セミナー:「ロボットビジネスセミナー」, 福岡ビジネス創造センター(福岡市),
2008.1.24-26
④ 一般公開セミナー:「科学技術連携施策群 次世代ロボット連携群 平成 19 年度第 7 回講演会/公
開実証実験 次世代ロボット共通プラットフォーム技術 -ロボットタウンの実証的研究-」, 福岡ビ
ジネス創造センター(福岡市), 2008.1.25

19
2.研究成果:サブテーマ毎の詳細
(1)サブテーマ1 分散ビジョンシステムと環境の情報構造化に関する研究
(分担研究者名:長谷川 勉、所属機関名:九州大学システム情報科学研究院)
1)要旨
環境に分散配置されたセンサを用いて環境情報を計測する環境センシング技術に関する研究を行っ
た。移動体の位置や動作を計測する分散ビジョンシステムおよび、このビジョンシステムの運用に必要と
なるカメラキャリブレーションを自動で行う群ロボットシステムをそれぞれ開発すると共に、分散ビジョンシス
テムとマネジメント機構を接続するための通信インタフェースの実装を行った。実証実験環境に分散ビ
ジョンシステムを設置して環境センシングを実施すると共に、通信インタフェースを介して分散ビジョンシス
テムとマネジメント機構を接続して、開発した技術の検証を行った。
2)目標と目標に対する結果
目標:
環境内に分散配置されたビジョンシステムを統合し、遮蔽による”隠れ”や移動体追跡時のフレー
ムアウトなどの単独ビジョンシステムの問題を解決することで、屋内外でのロバストな移動体(人間)の
検出・追跡を実現する。また、開発する分散ビジョンシステムと任意の社会インフラシステムとの間で
の相互的な情報共有を実現するための共通プラットフォームを構築し、「環境の情報構造化」実現へ
向けた要素技術の1つとして分散ビジョンシステムを確立する。
結果:
環境内に分散配置されたセンサを用いて移動体の検出・追跡を行うシステムを、環境情報構造化
プラットフォーム上に構築した。環境センシング実験による検証を通して、開発したシステムを環境情
報構造化の要素技術として整備した。これらにより、目標を達成することができた。
3)研究方法/調査方法
環境内に、複数のビジョンシステムを分散配置することで、ビジョンシステム特有のオクルージョン(隠れ
問題)を解決するだけでなく、シーン内の移動物体の位置計測・追跡、ビジョンシステム間の自己位置計
測を含む環境全体のモデル化、ビジョンシステムの故障に対するロバスト性の向上などが研究されている。
従来、これらの分散ビジョンシステムは、固別のロボットシステムのために設計、設置、実験が行なわれて
きたが、これを「環境の情報構造化」の観点から全てのロボットシステムに利用可能な共通プラットフォー
ムとすることが重要である。この共通プラットフォームとする方法として、ビジョンシステムのデータの通信
方法や、ネットワーク化の方法、ビジョンシステムとロボットを接続するためのインタフェースの研究が行な
われている。しかし、「環境の情報構造化」が屋内から屋外へと拡張される場合、また、「環境の情報構造
化」がロボット技術を超えて、広く他の社会インフラと結合する場合、従来のような工学的、技術的な観点
だけではなく、将来の分散ビジョンシステムの用いられ方を想定した研究が必要であり、これを早期に共
通プラットフォーム研究の一つとする必要がある。
本サブテーマは、分散ビジョンシステムと環境の情報構造化との関係を、人間とロボットの共生の観点か
ら再構築して研究を進める。具体的には、
研究項目①屋内外でのロバストな人間検出・追跡
研究項目②分散ビジョンシステムのセルフキャリブレーションと分散ビジョンシステム設計
研究項目③分散ビジョンシステムによる環境の情報を適切に管理・制御するタウンマネジメントシステム
の研究を行なう。共通プラットフォームとして成立するための、基礎技術、保守管理技術、技術の標準化
を同時に研究し、かつ、これを確認するために適切な実験シナリオを設定し、実証実験を行って、研究成
20
果の妥当性を明らかにする点で、これまでにない研究である。
研究項目① 屋内外でのロバストな人間検出・追跡に関する研究
高速レベルセット法(FLSM)によるロバストな人間追跡の研究成果を屋外の環境に拡張するための
諸問題を明らかにし、それぞれの問題の解決手法を示す。レベルセット法(LSM)は、変形する運動物
体の輪郭抽出法であり、複数対象のすれ違い時などのように対象の数や位相に変化を生じる情景でも
適用できるという優れた性質を持っている。しかし、計算手順が複雑なため、従来、これを人間追跡な
どの実時間画像処理に適用することは困難と考えられてきた。本サブテーマの研究グループは、この
計算手順を、精度を落とすことなく高速に計算するFLSM法を提案し、人間追跡の問題に適用し、その
有用性を確認してきた。これを照明変化や複雑背景などにより困難とされる屋外条件に拡張し、実時
間視覚追跡法を開発する。
研究項目② セルフキャリブレーションと分散ビジョンシステム設計に関する研究
完全に構造化された室内環境、たとえばロボティックルームなどでは、ビジョンシステムのキャリブ
レーションは、先験的に固定とすることができる。しかし、これから情報構造化しようというような環境に
おいては、ビジョンシステムのキャリブレーション自体が環境に負荷ないし付属的な機材を必要とするよ
うでは、環境自体が、変化してしまい、問題がある。この研究項目では、分散ビジョンシステムの環境内
での初期配置のみが決まった状態での、環境の情報構造化に必須のシステムのキャリブレーションを
自動的に行なう手法について研究する。
研究項目③ 分散ビジョンシステムによる環境の情報の管理・制御に関する研究
分散ビジョンシステムからの情報を統合し、複数のビジョンの視野をまたがる人やロボットの移動状況
を認識する手法、およびこれを共通プラットフォームに実装するための通信プロトコルについて研究を
おこなう。
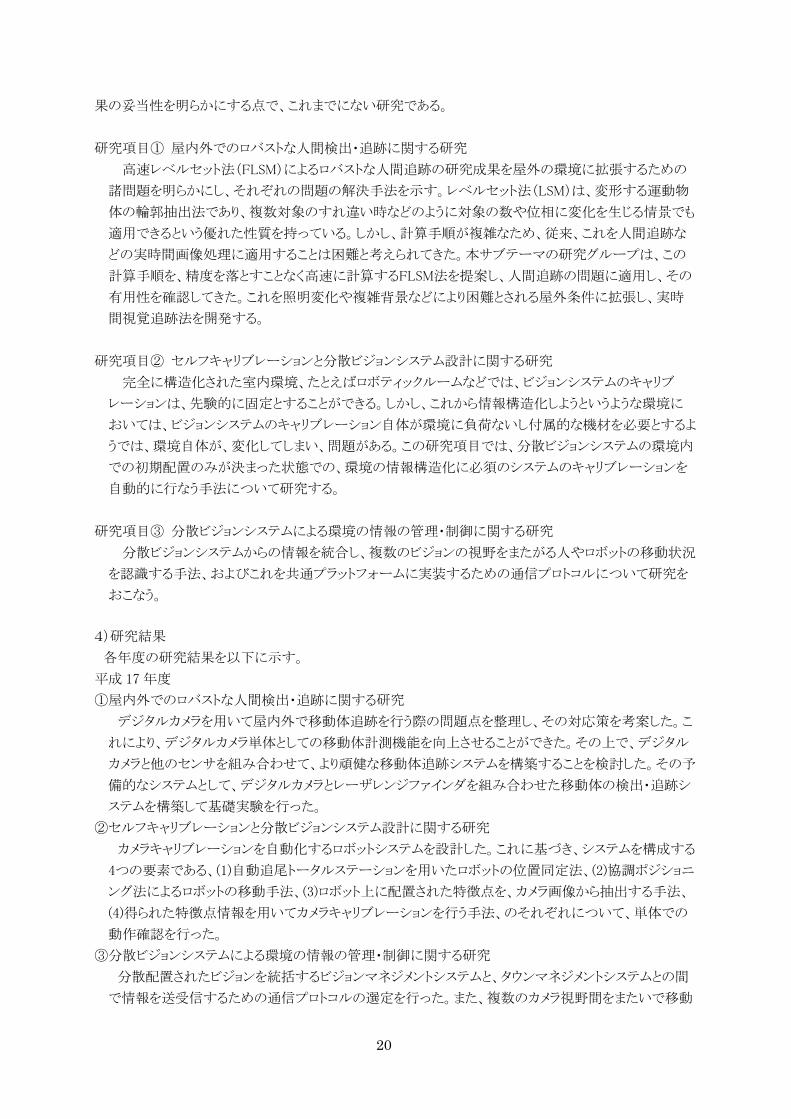
4)研究結果
各年度の研究結果を以下に示す。
平成 17 年度
①屋内外でのロバストな人間検出・追跡に関する研究
デジタルカメラを用いて屋内外で移動体追跡を行う際の問題点を整理し、その対応策を考案した。こ
れにより、デジタルカメラ単体としての移動体計測機能を向上させることができた。その上で、デジタル
カメラと他のセンサを組み合わせて、より頑健な移動体追跡システムを構築することを検討した。その予
備的なシステムとして、デジタルカメラとレーザレンジファインダを組み合わせた移動体の検出・追跡シ
ステムを構築して基礎実験を行った。
②セルフキャリブレーションと分散ビジョンシステム設計に関する研究
カメラキャリブレーションを自動化するロボットシステムを設計した。これに基づき、システムを構成する
4つの要素である、(1)自動追尾トータルステーションを用いたロボットの位置同定法、(2)協調ポジショニ
ング法によるロボットの移動手法、(3)ロボット上に配置された特徴点を、カメラ画像から抽出する手法、
(4)得られた特徴点情報を用いてカメラキャリブレーションを行う手法、のそれぞれについて、単体での
動作確認を行った。
③分散ビジョンシステムによる環境の情報の管理・制御に関する研究
分散配置されたビジョンを統括するビジョンマネジメントシステムと、タウンマネジメントシステムとの間
で情報を送受信するための通信プロトコルの選定を行った。また、複数のカメラ視野間をまたいで移動

21
する移動体を継続的に追跡するシステムの基礎実験を行った。
平成 18 年度
①屋内外でのロバストな人間検出・追跡に関する研究
デジタルカメラとレーザレンジファインダを組み合わせ、移動体を頑健に検出・追跡するシステムを開
発した。システムは、環境内に分散配置されたセンサ群で得られた情報を一元的に収集して入力とし、
移動体の計測を行う。収集したセンサ情報を統合することで、隠れに頑健であると共に、移動体が個々
のセンサのセンシング領域間を移動する場合にも一貫した追跡が行える。これらの成果により,高速レ
ベルセット法による移動体追跡の頑健性を向上できた。
②セルフキャリブレーションと分散ビジョンシステム設計に関する研究
カメラキャリブレーションを自動化するロボットシステムを実装した。システムを構成する4つの要素で
ある、(1)自動追尾トータルステーションを用いたロボットの位置同定法、(2)協調ポジショニング法による
ロボットの移動手法、(3)ロボット上に配置された特徴点を、カメラ画像から抽出する手法、(4)得られた特
徴点情報を用いてカメラキャリブレーションを行う手法を統合し、1つのロボットシステムとした。
③分散ビジョンシステムによる環境の情報の管理・制御に関する研究
分散ビジョンシステムとタウンマネジメントシステム間の通信インタフェースを、昨年度に行った設計に
もとづいて実装した。分散ビジョンシステムとタウンマネジメントシステムおよびロボットの3者間の情報共
有が、実装した通信インタフェースを介して行えることを確認した。
平成19年度
①屋内外でのロバストな人間検出・追跡に関する研究
高速レベルセット法を用いて人間の追跡や動作推定を実時間で行うシステムを開発し、このシステム
を環境に設置することで環境情報構造化が実現できることを、環境センシング実験を通して確認した。
まず、環境に分散配置されたカメラとレーザレンジファインダから得られる画像情報と距離情報を特殊
なパーティクルフィルタを用いて統合し、複数移動体の追跡を行うシステムを開発した。開発したシステ
ムを設置して情報構造化した環境で人間の追跡実験を行い、同時に11人以上の人間を実時間で検
出・追跡できることを確認した。次に、人物の位置、姿勢に応じてカメラを切り替えることで人間の動作
推定を頑健に行う分散ビジョンシステムを開発し、ロボットによる生活支援サービスの文脈の下で、人
間・ロボット間のインタラクション支援実験を行った。また、ロボットに取り付けた赤外LEDマーカを利用
してロボットの位置指定を高精度に計測する屋内GPSシステムを開発した。
②セルフキャリブレーションと分散ビジョンシステム設計に関する研究
環境の情報構造化に必須となる分散ビジョンシステムのカメラキャリブレーションを群ロボットを用いて
自動的に行なうシステムの開発を行った。昨年度までに開発したシステムでは、ロボットの移動経路を
手動で与える必要があったため、環境構造とカメラの概略配置を記した平面地図に基づいてカメラキャ
リブレーションするためのロボットの移動経路を計画する手法を開発した。
③分散ビジョンシステムによる環境の情報の管理・制御に関する研究
昨年度までに設計・実装した通信インタフェースの運用実験を行い、分散ビジョンシステム、タウンマ
ネジメントシステムおよびロボットの3者が、通信インタフェースを介して情報を共有できることを確認した。
実験では、まずタウンマネジメントシステムが通信インタフェースを介して、分散ビジョンシステムで計測
された移動体の位置情報を収集・管理できることを確認した。次に、この通信インタフェースを通してロ
ボットがタウンマネジメントシステムから位置情報を取得できることを確認した。また、複数のビジョンの
視野領域を横切りながら移動する人間やロボットに対して、タウンマネジメントシステムから移動体毎に
一意なグローバルID で付与することで、移動体の同一性を保持しながら一貫した追跡が行えることを

22
確認した。
5)考察・今後の発展等
本研究では、環境内に分散配置されたセンサを用いて移動体の検出・追跡を行うシステムを、環境情
報構造化プラットフォーム上に構築した。環境センシング実験による検証を通して、開発したシステムを環
境情報構造化の要素技術として整備することができた。今後は、構築した環境情報構造化プラットフォー
ムの公開に合わせて、外部の研究グループによる本研究成果の利用を求めていく。
6)関連特許
該当なし
7)研究成果の発表
(成果発表の概要)
1. 原著論文(査読付き) 4 報 (筆頭著者:4 報、共著者:0 報)
2. 上記論文以外による発表 該当なし
3. 口頭発表 主催講演:5 回、応募講演:47 回
4. 特許出願 該当なし
5. 受賞件数 該当なし
1. 原著論文(査読付き)
1) 長谷川勉:「ロボット技術の未来 - 日常生活環境で人間と共生し役に立つロボットを目指して- 」,Re,
Vol. 155, pp. 5-10, (2007)
2) 倉爪亮,戸畑享大,村上剛司,長谷川勉:「CPS-SLAM の研究 大規模建造物の高精度 3 次元幾何
形状レーザ計測システム」,日本ロボット学会誌, Vol. 25, No. 8, pp. 90-98, (2007)
3) 村上剛司,長谷川勉,木室義彦,千田陽介,家永貴史,有田大作,倉爪亮:「情報構造化環境にお
ける情報管理の一手法」, 日本ロボット学会誌, Vol.26, No.2, pp.72-79, (2008)
4) 長谷川勉:「ロボットタウンプロジェクト:日常生活環境の情報構造化」,ロボット, 181 号, 2008
2. 上記論文以外による発表
該当なし
3. 口頭発表
主催・応募講演
1) 小船博行, 村上剛司, 倉爪亮, 長谷川勉:「ロボットタウンの実現に向けて-分散ビジョンによるロボッ
トと人の行動計測-」,早稲田大学, 日本機械学会ロボティクス・メカトロニクス講演会, 2006.5
2) 戸畑享大, 倉爪亮, 村上剛司, 長谷川勉:「Cps slam の研究-cps-v の構築と slam 実験-」,岡山大
学, 第 24 回日本ロボット学会学術講演会, 2006.9
3) 長谷川勉:「ロボットタウンの実証的研究-全体計画の概要-」,岡山大学, 第 24 回日本ロボット学会学
術講演会, 2006.9
4) 横矢剛, 長谷川勉, 倉爪亮, 村上剛司:「ロボットタウンの実証的研究-広域分散カメラのロボットによ
る自動キャリブレーション-」,岡山大学, 第 24 回日本ロボット学会学術講演会, 2006.9
5) 山田弘幸, 倉爪亮, 村上剛司, 長谷川勉:「ロボットタウンの実証的研究-level set tracking と複数
レーザレンジファインダを用いた複数対象の同時追跡-」,岡山大学, 第 24 回日本ロボット学会学術

23
講演会, 2006.9
6) Tsutomu Hasegawa, and Kouji Muarkami:「Robot Town Project: Supporting Robots in an Environment
with Its Structured Information」,Lotte Hotel Ulsan (Korea),The 3rd International Conference on
Ubiquitous Robots and Ambient Intelligence,2006.10
7) 山田弘幸,村上剛司,倉爪亮,長谷川勉:「LevelSetTracking を用いた複数レーザレンジファインダと
カメラによる歩行者のトラッキング」,和泉屋(新潟県), 第 12 回ロボティクスシンポジア講演会, 2007.3
8) 横矢剛,倉爪亮,長谷川勉,村上剛司:「移動ロボットによる統一座標系での広域分散カメラキャリブ
レーション」,秋田拠点センターALIVE, 日本機械学会ロボティクス・メカトロニクス講演会, 2007.5
9) 森敬充,長谷川勉,倉爪亮,村上剛司:「複数カメラによるリアルタイム・モデルベースモーショントラッ
キング」,秋田拠点センターALIVE, 日本機械学会ロボティクス・メカトロニクス講演会, 2007.5
10) 戸畑享大,村上剛司,倉爪亮,長谷川勉:「移動ロボット群による大規模建造物の 3 次元レーザ計測
システムの開発」,広島市立大,第 10 回画像の認識理解シンポジウム, 2007.7
11) 山田弘幸,村上剛司,倉爪亮,長谷川勉:「SIR/MCMC パーティクルフィルタを用いた複数カメラと
レーザレンジファインダによる移動体のトラッキング」,広島市立大,第 10 回画像の認識理解シンポジ
ウム, 2007.7
12) 野辺大悟,村上剛司,長谷川勉,倉爪亮:「ロボットの行動支援を目的とした分散ビジョンシステムによ
る移動体計測」,千葉工業大学,第 25 回日本ロボット学会学術講演会, 2007.9
13) 山田弘幸,村上剛司,倉爪亮,長谷川勉:「SIR/MCMC パーティクルフィルタを用いたカメラ・レーザ
センサによる移動体追跡」,千葉工業大学,第 25 回日本ロボット学会学術講演会, 2007.9
14) 戸畑享大,村上剛司,倉爪亮,長谷川勉:「群ロボットを用いた大規模 3 次元環境計測システム」,千
葉工業大学,第 25 回日本ロボット学会学術講演会, 2007.9
15) 森敬充,村上剛司,倉爪亮,長谷川勉:「複数カメラによるリアルタイム・モデルベースドモーショント
ラッキング」,千葉工業大学,第 25 回日本ロボット学会学術講演会, 2007.9
16) 長谷川勉:「ロボットタウンの実証的研究-プラットフォームの概要-」,千葉工業大学,第 25 回日本ロ
ボット学会学術講演会, 2007.9
17) 長谷川勉:「ロボットタウンの実証的研究」,広島国際大学,第 8 回計測自動制御学会システムインテ
グレーション部門講演会, 2007.12
18) 横矢剛,倉爪亮,長谷川勉,村上剛司:「広域分散カメラのキャリブレーションを目的とした移動ロボッ
ト群の経路計画」,広島国際大学,第 8 回計測自動制御学会システムインテグレーション部門講演会,
2007.12
19) 長谷川勉,倉爪亮,村上剛司,木室義彦:「ロボットタウン:日常生活環境の情報構造化-プラット
フォームの実装とロボット作業への適用-」, テレコム先端技術研究支援センター, 電子情報通信学
会ネットワークロボット時限研究会 2007 年度第 2 回研究会, 2008.3
20) T. Hasegawa, K. Murakami, R. Kurazume, Y. Senta, Y. Kimuro and T. Ienaga:「Robot Town Project:
Sensory Data Management and Interaction with Robot of Intelligent Environment for Daily Life」,
Pohang University of Science and Technology (Korea),The 4th International Conference on
Ubiquitous Robots and Ambient Intelligence, 2007.11
4. 特許出願
該当なし
5. 受賞件数
該当なし

24
(2)サブテーマ3 分散センシングとタグ配置に関する研究
(分担研究者名:木室 義彦、所属機関名:財団法人九州システム情報技術研究所)
1)要旨
電子タグを用いた環境センシング技術に関する研究を行った。環境内に位置情報不明な電子タグが
多数存在している場合でもロバストに位置同定を行う手法を提案するなど、分散センシングにおける デ
バイスの屋外自律動作とセンサ機能を開発した。これを基にして電子タグをベースとした環境センシング
をタウンマネジメント機構に統合し、ロボット移動実験を通じて技術の検証を行った。また、これらの技術を
用いた公開実験を実施した。
2)目標と目標に対する結果
目標:
通院患者の、投薬管理、食事管理、住居内移動を含む移動リハビリ支援、通院支援、病院内移動
支援に、焦点を絞り、次世代ロボットを共通プラットフォーム上で動作させるための、分散センシング
とタグ配置について、研究を行なう。
結果:
4)の研究結果より、電子タグおよびタウンマネジメントシステムを用いたロボットの研究プラット
フォームの構築と実証を行った。これらにより、目標を達成できた。
3)研究方法/調査方法
従来、電子タグの配置は、流通分野での物品の追跡性のみ考慮されてきた。この電子タグを次世代ロ
ボットのための、環境の情報構造化に用いる場合、電子タグが添付される物体の情報管理や環境内の位
置情報の取得と同時に、この情報を用いて、いかにロボットを動作させるかが重要となる。特に、本プロ
ジェクトで想定している通院患者の生活支援、住居から病院までの移動支援、病院内の移動支援では、
動作させるロボットの安全性や信頼性を十分確保したものにしなければならない。また、患者の在宅時は、
医薬品の管理や服用の補助、リハビリを想定した適度な移動補助などが求められる。本サブテーマでは、
通院患者の、投薬管理、食事管理、住居内移動を含む移動リハビリ支援、通院支援、病院内移動支援に、
焦点を絞り、次世代ロボットを共通プラットフォーム上で動作させるための、分散センシングとタグ配置に
ついて、研究を行なう。この研究項目として、以下の 3 つを行う。研究は、サブテーマ責任者と研究協力
者の橋爪、各研究項目の担当者との共同により実施する。
研究項目①環境内タグ配置とロボットの自己位置同定に関する研究
病院内、住居およびその周辺環境に、電子タグを配置し、ロボットの自己位置推定を実現するために、
以下の 2 つの観点から研究を行なう。手法としては、RFID タグによる自己位置推定の論文に準拠する。
1) 電子タグとの送受信距離が限定されていたり、電子タグの送信出力が厳しく制限された環境下での、
ロボットの自己位置推定手法の研究とタグ配置計画(病院や一般住居でのタグ利用の問題点)
2) 電子タグの配置個所の制限や電子タグの故障を想定したロバストな自己位置推定手法の研究とタグ
配置計画(電子タグ使用時の一般的な問題点)
研究項目②医薬品,食事の管理を目的としたタグ配置とロボットの制御に関する研究
移動作業型ロボットによる生活支援では、(1)ロボットの自己位置推定、(2)操作対象物のハンドリング
および(3)人間とのインタラクションが実現できなければならない。本プロジェクトのサブテーマ移動作業
型ロボットを用いた電子タグ応用では、電子タグを主体とした環境の情報構造化の下での次世代ロボット

25
の制御手法について研究を行なうが、在宅患者の生活支援を目的とする場合、ロボット研究の側からだ
けではなく被支援者の側からの環境の情報構造化が必要となる。本サブテーマでは、医薬品容器や食
器への単純な電子タグ添付ではなく、服薬や食事療法といった医療行為を考慮したタグ配置とタウンマ
ネジメントシステム(サブテーマ情報構造化環境のマネジメント機構に関する研究)による管理について、
医療や福祉の側から研究を行なう。なお、器物ハンドリングについては、産総研の研究成果を利用し、多
指マニピュレーションは安川の研究と連携する。
研究項目③屋外移動支援におけるタグ配置問題に関する研究
屋外移動では、電子タグだけではなく、GPSやGIS情報を利用することで、より安全かつ安定した、移動
支援が実現できると予想できる。しかし、病院や住居内のように、ある程度、情報の構造化が容易な環境
とは異なり、屋外環境では、(1)全域を一様に情報構造化することが困難、(2)次世代ロボットとは別の社
会インフラ整備が並行して実施されており、そのインフラの維持コストも様々、といった問題が存在する。こ
こでは、通院患者が、住居内から病院まで自立的に移動することを支援することを 終ターゲット(ロボット
サービス)と想定し、その場合のタグ配置問題およびGPSやGISを併用する、環境の情報構造化の拡張問
題について研究を行なう。
4)研究結果
各年度の研究結果を以下に示す。
平成 17 年度
分散センシング及び電子タグに関する環境内の配置や計測範囲、環境からの要求仕様、デバイスの
性能を含めた基本モデルの検討及び設計を主に行った。
①環境内タグ配置とロボットの自律位置同定に関する研究
パッシブ方式の電子タグおよび電子タグリーダを用い、リーダを直交座標型ロボットアームに設置し、
並進移動時の電子タグの読み取り状態を実測した。ここでは、ロボットの移動速度とアンテナの受信範
囲の関係、電子タグ読み取り時の電子タグのチャージ時間と応答時間について計測を行った。さらに、
アンテナおよび電子タグの周囲に金属片が存在する場合の読み取り状態の計測も行った。これらの実
験により、電子タグの設置環境およびリーダの受信範囲を予め計測し、これに基づいた電子タグ配置
が必須であることが確認できた。
また、空間内での幾何学的な配置が既知の電子タグを用いて位置同定を行う従来手法ではなく、将来
的に環境内に位置情報不明な電子タグが多数存在することを前提としたよりロバストな位置同定手法
を考案した。これは、電子タグの位置情報が不明な環境下で、機械学習により位置推定を行うものであ
る。シミュレーション実験では、従来手法との比較および電子タグの故障状態での推定精度について
調査し、提案手法の有効性を確認した。
②医薬品、食事の管理を目的としたタグ配置とロボットの制御に関する研究
九州大学および九州日本電気ソフトウェアと協力し、TMS とロボットとの間の電子タグ情報の交換手
順や通信内容について検討を行った。その結果、情報要求元(トリガ)としてロボット(デバイス)側と
TMS 側の2つに整理し、要求元(トリガ)からのPush 処理(トリガ側からのデータ送出)とPull 処理(トリ
ガ側へのデータ送出)毎に、4種類の電子タグデータベース(電子タグID 標準、位置推定用、物品操
作用、既定タスク用)を準備する基本設計を行った。この他、既存のRT ミドルウェアを調査し、通信プ
ロトコル、データ転送シーケンス、DB 格納方式、転送データのセキュリティについて検討を行い、TMS
の基本設計を進めた。
③屋外移動支援におけるタグ配置問題に関する研究

26
通院患者が、住居内から病院まで自立的に移動することを支援することを 終ターゲット(ロボット
サービス)と想定し、その場合の電子タグ配置問題およびGIS やGPSを併用する、環境の情報構造化
の拡張問題について研究を行った。具体的には、GIS およびGPS を用いるシステムを試作し、次年度
以降に実施する、屋外移動支援のための走行可能経路計画の準備を行った。また、屋外移動支援ロ
ボットとして、電動車イスロボットを導入し、電子タグリーダの設置準備を行った。この他、ロボットタウン
において任意のロボットが電子タグ読取り機能や通信機能、GPS 機能を利用できるようにするためのロ
ボットインタフェース回路の試作も行った。
平成 18 年度
平成17年度に設計した環境センシングの基本モデルに沿って、分散センシングにおけるデバイスの屋
外自律動作とセンサ機能を実現した。また、マネジメント機構との接続機能を実現した。この中の機能(一
部)を用いた公開実験を実施した。
①環境内タグ配置とロボットの自律位置同定に関する研究
以下の2つの観点から研究を行なった。
(a)タグとの送受信距離や送信出力が制限された環境下でのロボットの自己位置推定手法の研究とタ
グ配置計画
平成17年度末に考案した配置不明のタグを用いた位置推定手法を電動車椅子ロボットに実装し、
ISITのオフィスフロアで実験を実施した。この手法の性能を、実測およびシミュレーション環境とで
確認した。これにより、廊下環境下での位置推定において、タグ配置を既知とする 小二乗法によ
る手法と同程度の性能があることが確認された。なお、タグ配置の情報を取得できれば、実際の走
行だけでなく、シミュレーション環境により走行パターンを生成し、学習を進めることができる。
(b)タグの配置箇所の制限や故障を想定したロバストな自己位置推定手法の研究とタグ配置計画
本年度に作成したシミュレーション環境を用い、タグの追加配置や故障による減少を考慮したシ
ミュレーション実験を行ない、前述の自己位置推定手法における性能低下について検討を行なった。
提案手法が機械学習を用いていることから、この性能低下の影響が小さいことが確認された。
②医薬品、食事の管理を目的としたタグ配置とロボットの制御に関する研究
医薬品容器や食器への単純なタグ添付ではなく、自宅での服薬や食事療法といった日常生活を考
慮したタグ配置とタウンマネジメントシステム(TMS) による管理について、研究を進めた。今年度は、次
の2点についてTMS の仕様を策定し、実装した。
(a) 医薬品や食器へのタグ添付による品名や位置情報の提供だけでなく、TMS のデータベース
(DB)に、服用時の注意(医薬品)や服薬の勧め(食器(食事))の情報を同時に記録できるように、
TMS の仕様を策定した。ロボットは、自己内部に大量のDBを保持しなくても、この情報を TMSから
得ることでき、自身の制御に利用することが可能となる。
(b) ロボットシステムに必要な環境情報として、環境の変化がある。この環境変化をロボットに搭載され
たセンサのみで観測することは、観測範囲や情報処理量の点で困難であった。これを環境内に設
置されたセンサシステムから得ることができれば、ロボット本体の負担を減らすことができる。さらに、
一定のセンサ情報処理の結果を予めイベントとして登録し、ロボットが利用できれば、ロボットの負
担はより小さくなる。これにより、タグの検出自体も環境変化を通知するイベントとして利用できる。
上記(a) のロボットによる特別な物品の把持やユーザからの特別な指示がこれに相当する。このイ
ベントをロボットに通知するための機能をTMSの仕様として策定し、一部を実装した。
③屋外移動支援におけるタグ配置問題に関する研究
屋外移動では、電子タグだけではなく、GPSやGIS情報を利用することで、より安全かつ安定した移動
支援が実現できる。しかし、屋内の情報構造化とは異なり、屋外環境では、(a) 全域を一様かつ密に情

27
報構造化することが困難、(b) 次世代ロボットとは別の目的で研究・整備されている社会インフラとの接
続と利用、という問題が存在する。本サブテーマでは、これらを考慮したタグ配置問題およびGPSやGIS
を併用する、環境の情報構造化の拡張問題について研究を行なった。
(a)の問題については、ロボットの動作環境が、屋外/屋内、整備/非整備環境、公共/個人施設、
など様々であること、それぞれの環境毎に特有の座標系が利用されていることが重要である。また、
タグに付与されている位置情報と異なる座標系での情報が求められる場合もある。このことから位
置情報を座標系IDと位置の組で管理する方法について検討した。この検討をもとに、屋外の位置
情報に関して、GPS などで用いられる緯度経度の情報から、メートルを単位として位置を表現する
平面直角座標系への変換モジュールの実装を行なった。
(b)の問題については、WebGISの試作(H17 年度成果)を展開し、ロボットに応じて局所的な地図を
自動的に生成する方法について研究を行なった。地図の自動生成は、TMS の外部の地図配信
サーバと市販の地図データ(国土地理院地図等)およびTMS 管理下にあるロボット動作環境の
ローカルな地図データ(実測)から、局所的な地図データを生成することとし、一部のモジュールを
開発した。
平成 19 年度
平成18年度に実現した、分散センシングにおける デバイスの屋外自律動作とセンサ機能を基に、タグ
をベースとした環境センシングをタウンマネジメント機構に統合し、ロボット移動実験を通じて、技術の検
証を行った。これらの技術(機能の一部)を用いた公開実験を実施した。
①環境内タグ配置とロボットの自律位置同定に関する研究
病院内、住居およびその周辺環境に、電子タグを配置し、ロボットの自己位置推定を実現するために、
以下の2つの観点から研究を行い、その機能の一部をプラットフォームとして利用可能なものとする。手
法としては、電子タグによる自己位置推定の論文に準拠する1)。
(a)電子タグとの送受信距離が限定されていたり、電子タグの送信出力が厳しく制限された環境下での、
ロボットの自己位置推定手法の研究とタグ配置計画(病院や一般住居でのタグ利用の問題点)
平成17年度に考案した配置不明のタグを用いた位置推定手法および配置不明のタグの探索手法
を電動車いすロボットに実装し、タグの整備環境である実験住宅で実験を実施した。この手法の性
能を、実測およびシミュレーション環境とで確認した。これにより、配置不明のタグの設置環境を、情
報構造化環境として利用することが可能であることが確認できた。
(b)電子タグの配置個所の制限や電子タグの故障を想定したロバストな自己位置推定手法の研究とタ
グ配置計画(電子タグ使用時の一般的な問題点)
実験住宅は、タグ配置の情報がタウンマネジメントシステムにより管理されていることから、タグ配置
に関する様々な実験が可能である。平成19 年度は、前年度に作成したシミュレーション環境を用
い、配置情報が得られているタグとそうでないタグのいくつかのパターンを想定し、タグを追加配置
することで、ロボットの自己位置推定手法が緩い条件下でも動作することを確認した。
②医薬品,食事の管理を目的としたタグ配置とロボットの制御に関する研究
医薬品容器や食器への単純な電子タグ添付ではなく服薬の注意や食事療法といった生活支援行為
を考慮した、タグ配置とタウンマネジメントシステム(TMS)による管理について、研究を進めた。今年度
は、昨年度に仕様策定し、実装したTMS の次の2 点の機能の検証と、実証実験を行なった。
(a)TMS のデータベース(DB)には、医薬品や食器へのタグ添付による品名や位置情報の提供だけ
でなく、生活支援に資する様々な情報を同時に記録できるように、仕様策定されている。これらの一
部は、実験住宅内での生活支援実験に用いられると同時に、病院内での移動支援実験でも利用
することが可能であることが示された。具体的には、患者の診察券に埋め込まれたタグデータと診

28
療計画(診察や検査の順序等)を連動させたロボットの制御が可能となった。
(b)ロボットシステムに必要な環境情報として、環境の変化(イベントと呼称)がある。これは、センサシス
テムが検出するだけでなく、タグの検出自体も環境(状況)の変化に相当するものがある。本年度は、
実験住宅屋外での移動支援実験(タウンコミュータ実験)および病院内移動支援実験において、車
いすロボットの呼出しイベントとして動作することを実験により確認した。
③屋外移動支援におけるタグ配置問題に関する研究
屋外移動では、電子タグだけではなく、GPS やGIS 情報を利用することで、より安全かつ安定した移
動支援が実現できる。しかし、屋内の情報構造化とは異なり、屋外環境では,(a)全域を一様かつ密に
情報構造化することが困難、(b)次世代ロボットとは別の社会インフラ整備が存在、という問題が存在す
る。ここでは、通院患者が、住居内から病院まで自立的に移動することを支援することを 終ターゲット
(ロボットサービス)と想定し、その場合のタグ配置問題およびGPS やGIS を併用するための、環境の
情報構造化の拡張問題について研究を行った。
(a)の問題については、ロボットの動作環境が、屋外/屋内、整備/非整備環境、公共/個人施設、
など様々であること、それぞれの環境毎に特有の座標系とセンサシステムが利用されていることが
重要である。このことから屋外の位置情報を、ビジョンおよびタグにより、それぞれ取得し、車いすロ
ボットを動作させる実験を行った。TMS を介して、異なるセンサからのロボットの自己位置情報や地
図情報を得ることができることが、実験で確認できた。屋外でのロボットの移動範囲は、未だ広範囲
とは言えないが、TMS のカバーする範囲を広げることで、ロボットの動作範囲を拡大することができ
る目途がついたといえる。
(b)の問題については、実験環境に応じて、アクティブタグや無線通信モジュールを導入し、TMS から
利用可能とすることで、住宅周辺から病院内まで、同一の車いすロボットを、同様に制御できること
が、実験住宅屋外移動支援実験および病院内移動支援実験により確認できた。
5)考察・今後の発展等
本サブテーマの研究開発を通して、電子タグおよびタウンマネジメントシステムを用いたロボットの研究
プラットフォームの構築と実証が、当初の予定通り達成できた。今後は、本研究プラットフォームの公開方
法やサポートについて検討を続けると共に、本研究プラットフォームを利用したロボットシステムの研究や
関連研究を進めることで、研究プラットフォームの実用事例を内外に公開する。
6)関連特許
該当なし
7)研究成果の発表
(成果発表の概要)
1. 原著論文(査読付き) 2 報 (筆頭著者:1 報、共著者:1 報)
2. 上記論文以外による発表 該当なし
3. 口頭発表 応募講演:11 回
4. 特許出願 該当なし
5. 受賞件数 該当なし
1. 原著論文(査読付き)
1) 千田陽介, 木室義彦, 財部修平, 長谷川勉:「配置不明なタグを用いた自己位置推定」,電気学会
論文誌 C 編, Vol.128-C, No.7, (2008)

29
2) 村上剛司,長谷川勉,木室義彦,千田陽介,家永貴史,有田大作,倉爪亮:「情報構造化環境にお
ける情報管理の一手法」, 日本ロボット学会誌, Vol.26, No.2, pp.72-79, (2008)
2. 上記論文以外による発表
該当なし
3. 口頭発表
主催・応募講演
1) 長谷川、木室、松本:「ロボットタウンの実証的研究-日常生活環境の情報構造化による自律ロボット
支援-」, 大阪大学,ネットワークロボット研究会 平成 17 年度第 4 回研究会, 2006.3
2) 千田、木室、財部、長谷川、松本:「RFID システムによる自己位置推定へのサポートベクタマシンの適
用」,早稲田大学, 日本機械学会ロボティクス・メカトロニクス講演会, 2006.5
3) 馬場伸一, 吉垣伸介, 丸山博史, 黒瀬光彦, 殷中翔, 村上剛司, 木室義彦, 長谷川勉:「ロボットタ
ウンの実証的研究-タウンマネジメントシステムの開発-」,岡山大学, 第 24 回日本ロボット学会学
術講演会, 2006.9
4) 千田陽介, 木室義彦, 財部修平, 長谷川勉:「ロボットタウンの実証的研究機械学習を用いた電子タ
グによる自己位置推定法」,岡山大学,第 24 回日本ロボット学会学術講演会, 2006.9
5) 財部修平, 千田陽介, 木室義彦, 長谷川勉:「配置不明の電子タグを用いる車イスロボットの自己位
置推定」, 佐賀大学, 第 25 回計測自動制御学会九州支部学術講演会, 2006.12
6) 長谷川、倉爪、谷口、木室:「ロボットタウン:日常生活環境の情報構造化-システム統合とサービス
実験-」, テレコム先端技術研究支援センター, 電子情報通信学会ネットワークロボット時限研究会
平成 18 年度第 3 回研究会, 2007.3
7) Y. Senta, Y. Kimuro, S. Takarabe and T. Hasegawa:「Machine Learning Approach to Self-Localization
of Mobile Robots using RFID Tag」, Proc. The 2007 IEEE/ASME Int. Conf. on Advanced Intelligent
Mechatronics, Swiss Federal Institute of Technology (Switzerland),2007.9
8) 千田、財部、木室、長谷川:「散策型ロボットによる電子タグの埋設位置計測」,鹿児島大学, 第 26 回
計測自動制御学会九州支部学術講演会, 2007.12
9) 財部修平,木室義彦,千田陽介,長谷川勉:「散策型ロボットによる RFID タグの位置推定」, 広島国
際大学,第 8 回計測自動制御学会システムインテグレーション部門講演会,2007.12
10) 長谷川勉,倉爪亮,村上剛司,木室義彦:「ロボットタウン:日常生活環境の情報構造化-プラット
フォームの実装とロボット作業への適用-」, テレコム先端技術研究支援センター, 電子情報通信学
会ネットワークロボット時限研究会 2007 年度第 2 回研究会, 2008.3
11) T. Hasegawa, K. Murakami, R. Kurazume, Y. Senta, Y. Kimuro and T. Ienaga:「Robot Town Project:
Sensory Data Management and Interaction with Robot of Intelligent Environment for Daily Life」,
Pohang University of Science and Technology (Korea),The 4th International Conference on
Ubiquitous Robots and Ambient Intelligence, 2007.11
4. 特許出願
該当なし
5. 受賞件数
該当なし

30
(3)サブテーマ3 移動作業型ロボットを用いた電子タグ応用
(分担研究者名:横山和彦、所属機関名:株式会社安川電機)
1)要旨
実ロボットを使って実証シナリオを実現し、ロボットタウンの共通プラットフォームであるTMSの有効性を
確認した。まず双腕ロボットと搬送ロボットに対して、実証シナリオを実現するために必要な改作を行った。
次にロボットを制御するために必要なソフトウェアを開発した。準備したロボットと制御ソフトを利用して、作
業、移動の観点からTMSや電子タグを応用した機能の開発を行った。開発した機能を統合した実証シナ
リオを作成し、シナリオに沿ってTMSから移動や作業に必要な環境情報を取得しながら双腕ロボット及び
搬送ロボットを動作させることにより、従来のロボットでは実現が困難であった家庭内サービスアプリケー
ションを実現できた。 これらの実験を通して、TMSや電子タグといった環境知能の有効性を実証した。
2)目標と目標に対する結果
目標:
本サブテーマの目標は,実際にロボットを用いてTMSから取得した情報を活用して具体的なサー
ビスを実現することである。住宅内におけるサービスロボットを想定し、床に敷設した電子タグ、作業
対象物に貼付した電子タグ、環境側に配置したセンサによって計測された物や人の位置情報を、ど
のようにしてロボットの移動や作業に応用できるかを研究する。そして開発した機能を組み合わせた
サービスシナリオを作成し、実際に環境センサ、TMS、ロボットの3者をシステムとして組み上げ、実証
を行う。
結果:
4)の研究結果より,目標を達成できた。
3)研究方法/調査方法
作業空間を移動し作業するロボット(以下、移動作業型ロボットと呼ぶ)は、外界センサ(ビジョンセンサ
等)で計測した環境情報を、事前に登録した環境情報と照合することにより、自己位置の認識や、作業対
象物の認識を行ってきた。工場で作業する産業用ロボット分野では、作業環境や作業対象物(以下、両
者を合わせて作業環境と呼ぶ)が構造化されているため、この手法で対応することが可能であった。しか
し、工場以外の作業空間(オフィスや病院等の施設、住居等)で作業するサービスロボット分野では、作
業環境の構造化が難しく別の手法が求められている。その一つとして、近年物流等で実用化されている
電子タグを作業環境側に設置し、その電子タグに作業環境の情報を登録してロボットが必要な時に、そ
の情報を読み出すという手法が考えられる。この手法を用いると、従来計測されていた作業環境側が自
分自身の情報を有しているので、移動作業型ロボットの応用作業(アプリケーション)開発が容易になると
いう利点が期待され、サービスロボット市場の拡大に貢献すると考えられる。
このような背景のもと、本提案では電子タグの移動作業型ロボットへの応用に関する課題を解決する研
究開発を提案している。本サブテーマでは、実環境或いは模擬環境において移動作業型ロボットを使用
し,他サブテーマの研究開発成果の実証試験を実施することを目的とする。なお、この実証は株式会社
安川電機が所有する移動作業ロボット(以下、ロボットと呼ぶ)に電子タグリーダ/ライタを搭載して実施す
る(ロボットの改造を含む)。
上記の目的を達成するために、平成17年度は、市販の電子タグリーダ/ライタ(以下、電子タグ装置と
呼ぶ)を台車やロボットに搭載して、電子タグ装置をロボットに搭載した場合の基礎実験を実施する。これ
により、電子タグ装置をロボットに搭載した場合の課題(アンテナの位置、ロボット(金属フレーム)に搭載
するという事による影響、電子タグ情報が読み取れる領域等)を抽出する。平成18年度は、平成17年度に

31
抽出した課題を解決する方策を検討し、その方策に基づいた改造をロボットに施して、有効性を検証する。
平成19年度は、平成18年度までの成果をもとに、ロボットを改造して、実環境或いは模擬環境において、
実証試験を実施する。
研究項目①ロボットの移動に関する電子タグの応用実証
他サブテーマの研究成果のうち移動に関する応用実証を実施に関する基礎実験及び課題の
抽出、課題に対する方策を検討する。
研究項目②ロボットの作業に関する電子タグの応用実証に関する研究
他サブテーマの研究成果のうち作業に関する応用実証に関する基礎試験及び課題の抽出、
課題に対する方策を検討する。
研究項目③移動作業ロボットの電子タグの応用実証
研究項目①と②の成果を統合して、移動作業ロボットにおける電子タグの応用実証を実施する。
4)研究結果
各年度の研究結果を以下に示す。
平成 17 年度
住宅内におけるサービスロボットに電子タグを応用する事例として実証試験シナリオの原案を作成した。
このシナリオに従い電子タグと電子タグ装置の設置位置を決定するために必要な特性を取得し、使用条
件および通信可能範囲を明確にすることができた。さらに、これらの特性から電子タグをロボットの移動と
作業に適用するときの課題を抽出した。
(a) 電子タグの使用条件
· 電子タグと電子タグ装置間で通信可能な位置範囲には、読み書き可能、読み取りのみ可能、ID 認
識のみ可能の範囲が存在する。その範囲は電子タグのID を認識できる範囲が も広く、次が読み
取りのみ可能な範囲であり、読み書き可能な範囲が も狭い。
· 電子タグが電子タグ装置に角度を持って対する場合、通信可能な範囲が変化する。特に電子タグと
電子タグ装置が垂直な場合では距離に寄らず認識ができない。しかし、電子タグ装置を装置の接線
方向に動かすことにより認識可能となる。
· 電子タグや電子タグ装置近傍に金属体が存在すると、通信可能な範囲が狭くなる。
(b) 作業に関する課題
· グリッパの内部にはフレーム等の金属部分が存在するため、これらの影響を考慮した電子タグ装置の
取り付け位置と取り付け方法の検討が必要である。
· ロボットアームによる作業を行うためには電子タグの位置特定が必要である。そのため、ロボットアー
ムの動作情報と電子タグ装置の通信履歴から電子タグの位置特定を行う処理が必要である。
· 棚に置かれた複数の作業対象物から特定の対象物を探す等の作業では、ロボットアームの動作のみ
では対応できないような広範囲における電子タグの認識が必要になる。そのため、ロボットアームと移
動体を連携して電子タグの認識を行う処理が必要となる。
(c) 移動に関する課題
· 電子タグ装置をロボットに搭載した際の通信可能領域を考慮し、ロボットの移動時に電子タグを確実
に認識できる電子タグと電子タグ装置の設置方法を検討する必要がある。
· 移動に用いる電子タグ装置と作業に用いる電子タグ装置が、互いに干渉しないような取り付け位置を
検討する必要がある。またロボットアームの動作により電子タグ装置間の近接が避けられない場合に
は、各電子タグ装置の排他的な稼動管理が必要である。

32
平成 18 年度
本研究は、環境中に配置された電子タグ及びTMSを活用してロボットの移動及び作業が効率的に行え
ることを実証することが目的である。そこで電子タグやTMSを利用した7種類の単体シナリオを用意した。
そして単体シナリオを全て含む 終実証シナリオ案を作成した。また昨年度の成果を活かして、電子タグ
装置を 適な位置に装備したロボットハンドとボディカバーを試作した。それらを搭載したロボットを使って、
作業や移動に関する単体シナリオを実現するために、単体機能の開発・実験を行った。更に7種類の単
体シナリオを含む部分シナリオを設定し、前述の単体機能の成果を応用して、実際にロボット、電子タグ、
TMSを動作させて実証した。
(a) 終実証シナリオ案の作成
電子タグや TMS を活用してロボットの移動及び作業が効率的に行えることを実証するために、7 種類の
単体シナリオを作成した。各々の単体シナリオについて具体例、特徴、応用を示し、電子タグや TMS を使
用することによる利点を明確にした。これら 7 種類の単体シナリオ全てを含む 終実証シナリオ案を作成
し、次年度の目標を明確にした。
(b) ロボット作業応用の検討
電子タグ装置を搭載したロボットハンドを使って、その性能評価を行い次のことが分かった。また、電子
タグ装置とロボットアームによる電子タグ位置算出を行い±3mm 程度の誤差で電子タグの位置を算出で
きることがわかった。これをロボットアームの動作プログラムとして実装し実機による確認を行ったところ、電
子タグとアンテナがおおよそ±1mm 程度の誤差で合うことを確認した。 終実証シナリオではハンガーに
吊した服や靴箱の位置を特定して把持することが目的であるが、本精度で把持することが可能である。
(c) ロボット移動応用の検討
電子タグ装置を搭載したカバーを装着したロボットを使って基本性能を確認し、以下、3 つの応用につ
いて検討した結果を示す。
(c-1)進入禁止領域検出・停止機能
床面に敷設した電子タグを使って、進入禁止領域へのロボット侵入を検出する機能を実現し、以下 3 つ
の知見を得た。
· 進入禁止電子タグの検出方法は、進入禁止電子タグ一覧をあらかじめTMS から取得しておく方法が、
即応性において も優れている。
· 電子タグ敷設密度は、現システム( 高移動速度500mm/s、加速度300mm/s2)では、電子タグ数3×
3(電子タグ間隔約167mm)が適当である。
· 進入禁止を示す電子タグは、ロボットの移動速度を考慮して実際の進入禁止領域境界線から一定距
離以上外側に設置する必要がある。しかしこの距離は移動速度に比例して大きくなるので運用上現
実的ではない。進入禁止領域の外側に低速走行を指定する電子タグを別途設けると、上記距離を小
さく抑えることが可能である。
(c-2)移動経路確認機能
床面に敷設した電子タグを使ってロボットの移動経路確認機能を実装し、その動作を確認した。ロボット
が想定した経路から外れた場合、減速や停止といった安全処置を施すことが可能である。
(c-3)ロボット初期位置および方位角の同定機能
床面に敷設した電子タグを使ってロボットの初期位置および方位角を同定するための方策を考案・実装
し、効果を確認した。しかし実験で得られた位置分解能は125mm程度、方位角度分解能は90deg以下で
あり、電源投入時などの初期状態取得に用いるには分解能の大幅な向上が必要である。そのための方
策は次年度に継続して検討する予定である。
(d) 部分シナリオに基づいた実証
クリーニング屋を想定した部分シナリオを作成した。本部分シナリオを繰り返し動作させ、問題なく動作

33
することを確認した。本部分シナリオを用いて、単体シナリオ 7 個を実証することができた。また、電子タグ、
ロボットの作業、ロボットの移動、TMS といった本研究の主たる装置を全て統合して動作させることにより、
終実証シナリオ実現に向けての基盤が構築でき、課題を抽出することができた。
平成 19 年度
まず双腕ロボットと搬送ロボットに対して、実証シナリオを実現するために必要な改作を行った。次にロ
ボットを制御するために必要なソフトウェアを開発した。準備したロボットと制御ソフトを利用して、作業、移
動の観点からTMSや電子タグを応用した機能の開発を行った。そして開発した機能を統合したシナリオを
作成し、それに基づいたアプリケーション開発・デモを行うことで、TMSや電子タグといった環境知能の有
効性を実証した。
(a) ロボット作業機能への応用
(a-1)TMSの逆引き検索による把持対象物の特定方法
ロボットによるサービスの応用を検討した結果、TMSのデータベースに対して逆引き機能が必要なこと
を昨年度課題提起し、TMS2.0において本機能が実装された。実際にTMSクライアントソフトで検索条件を
指定し、TMSの逆引き検索が機能することを確認した。また実証シナリオに沿って検索を行い、複数の作
業対象物から目的とするデータレコードが抽出できることを確認した。更に検索したデータレコードのタグ
ID、位置情報、靴箱の幅データなどをロボットの作業に利用し、作業対象物の位置を入れ替えたり、靴箱
の大きさを変更しても同一アプリケーションでサービスが実行できることを確認した。
(a-2)ロボットアームによる物品の探索・把持機能
昨年度の実験より、電子タグ装置とロボットモーションによる電子タグ位置算出を行い数mm程度の誤差
で電子タグの位置を算出できることが分かっている。これをふまえて、靴箱の位置を特定し把持するアプリ
ケーションを作成した。本把持動作は左右のロボットアームを使用して靴箱を挟み込みこんで持ち上げる
方式とした。またロボットアームのモーション軌跡を靴箱の幅を基に算出するようにし、靴箱の幅データを
TMSから取得することによって、大きさの異なる靴箱に対しても把持できることを確認した。
(b) (b) ロボット移動機能への応用
(b-1)ロボット初期絶対位置の自動取得機能
昨年度考案した手法では実用的な位置・方位角分解能が得られなかった(位置125mm、方位角90deg
程度)。今年度は新たな手法を開発し、位置の絶対精度はXY並進・回転それぞれ10mm未満、1deg未満、
繰り返し精度はXY並進・回転それぞれ2mm未満、0.2deg未満という結果を得た。本結果は、住宅内サー
ビスなどの作業を遂行するには十分であることを確認した。また本手法に関する発明を1件出願した。
(b-2)前面アンテナを使用した障害物回避方法
双腕ロボットの前面アンテナの応用例として、電子タグを貼付した障害物の障害物回避方法を検討し
た。これを実証するために障害物の形状データをTMSに登録し、そのデータを利用した回避プログラムを
作成し、実際にロボットを動作させ確認した。ビジョンやレーザレンジファインダといった従来センサでは、
障害物の奥行きを検出することは困難であるが、電子タグを利用することで容易に回避経路を算出できる
ことを確認した。
(b-3)TMSを利用した移動経路の生成方法
実証シナリオでは、ロボットは指示された衣服をクローゼットへ取りに行く。そこでTMSに登録するデー
タの衣服レコードに収納棚IDを、収納棚レコードに地図のノード番号を登録することで、指示された衣服
から終点ノードを探索、取得できるようにした。この終点から経路を算出することで、双腕ロボット・搬送ロ
ボットともにシナリオに沿って住居内を移動できることを確認した。

34
(c) ロボット作業・移動以外の機能への応用
(c-1)TMSタスク送信機能によるロボットの協調
TMSにはログインしているロボット間でタスクメッセージを配信する機能がある。これを利用すると、個別
に通信ソフトを開発することなく、ロボット間で同期を取るアプリケーションを実現することができる。本研究
では実証シナリオにおいて、双腕ロボットから搬送ロボットへ移動指令を送信し目的地へ移動できることを
確認した。
(c-2)TMSイベント通知機能による環境センサとの連携
TMSには環境センサが検出したイベントを、それを購読登録しているロボットに通知する機能がある。こ
れを利用することで、ロボットはイベント発生に同期した動作を行うことが可能となる。本研究では実証シ
ナリオにおいて、環境センサとしてカメラを利用したモーションキャプチャを用意し、これが検出する人の
手招き動作イベントを双腕ロボットに購読登録させた。これにより、利用者の呼び出しに呼応する形で
サービスを開始できることを確認した。
(c-3)TMSに登録された情報による発話機能
TMS に登録した衣服の使用履歴データを利用することで、選択した衣服に対応させて発話パターン
を変更できることを確認した。例えば、使用年数から「この上着はもう3 年も着ました。お気に入りです
ね。」といった発話である。また、今後Web サービスとTMS を接続しコンテンツを定期的に更新する機能
を開発すれば、利用者へロボットを介した情報提供を行うことも可能である。
(c) (d) 実証シナリオに基づいた実証とデモ
本プロジェクトで考案したTMSの有効性を実証するために、一般住宅内での生活支援を想定した実証
シナリオを作成した。シナリオに沿ったサービスを実現するために、本プロジェクトの成果であるTMS、環
境知能(モーションキャプチャやiGPS)、電子タグ装置搭載の双腕ロボット、搬送ロボットを統合したシステ
ムを構築し、デモ・アプリケーションを開発した。その結果、従来のロボット単体によるサービスと比較して、
より機能を拡張したサービスの実現が可能であることを示すことができた。また、本成果を平成20年1月25
日に一般公開デモした。
5)考察・今後の発展等
本研究では、実証シナリオに沿ってTMSから移動や作業に必要な環境情報を取得しながら双腕ロボッ
ト及び搬送ロボットを動作させることにより、従来のロボットでは実現が困難であった家庭内サービスアプリ
ケーションを実現することができた。
今後は本研究活動で得られた知見を基にして、人間とロボットが共存する環境でサービスを提供する
次世代ロボットの知能化技術の開発に取り組む予定である。
6)関連特許
該当なし
7)研究成果の発表
(成果発表の概要)
1. 原著論文(査読付き) 該当なし
2. 上記論文以外による発表 該当なし
3. 口頭発表 応募講演:2 回
4. 特許出願 出願済み特許:1 件 (国内:1 件)
5. 受賞件数 該当なし

35
1. 原著論文(査読付き)
該当なし
2. 上記論文以外による発表
該当なし
3. 口頭発表
主催・応募講演
1) 足立勝,岸泰生,亀井泉寿,中村高幸,横山和彦:「ロボットタウンの実証的研究タウンマネジメントシ
ステムを用いたロボットの開発」, 千葉工業大学, 第 25 回日本ロボット学会学術講演会, 2007.9
2) 足立勝,岸泰生,亀井泉寿,中村高幸,横山和彦:「タウンマネジメントシステム用いたロボットの開
発」,広島国際大学,第 8 回計測自動制御学会システムインテグレーション部門講演会,2007.12
4. 特許出願
出願・公告等の日付 「発明の名称」 発明者氏名 出願人名 特許等の種類・番号
1) 平成 19 年 10 月 29 日 移動台車の制御装
置、移動台車シス
テムおよび自己位
置同定法
足立勝
岸泰生
株式会社
安川電機
利 島 康
司
出願番号
20007-280613
1)電子タグのロボット移動機能への応用のうち「ロボット初期絶対位置の自動取得機能」に関わる
発明である。
5. 受賞件数
該当なし

36
(4)サブテーマ4 情報構造化環境のマネジメント機構に関する研究
(分担研究者名:馬場 伸一、所属機関名:九州日本電気ソフトウェア株式会社)
1)要旨
ロボットや環境センサ等の個々の要素が連携する際に使用する標準的なサービスの記述、およびその
サービス記述を用いて全体制御を行うシステムの標準モデルを設計し,その設計に基づいてタウンマネジメ
ントシステムを開発した。タウンマネジメントシステムを用いたロボット実証実験を通して、その機能を検証した。
また、タウンマネジメントシステムの公開に向けて、ドキュメント類、サンプル、インストーラなどを整備した。
2)目標と目標に対する結果
目標:
従来のロボットシステムを構築するためのロボット技術では、ロボット自身が内蔵する各種センサや思
考制御への依存度が高く、障害物の先がロボットからは物理的に分からない等の構造的問題、および
ロボットに内蔵させるという各種技術限界が、ロボットの動作精度を低くし、ロボットの活用領域も狭め
ている。また、各種技術の乱立で標準化が進んでいない事は、ロボット開発を複雑、困難にしている。
従って、ロボットの一般社会への普及促進を図るには、ロボット単体での高機能化・知能化を目指
すだけではなく、ロボットが環境に構造的に埋め込まれたセンサ類からの情報を活用しながら、様々
なサービスを提供できるような標準的なシステムの確立が必要である。
そこで、環境情報活用に関連する各種技術等の成果や既存の標準等を広く調査し、ロボットや環
境センサ等の個々の要素が連携する際に使用する標準的なサービスの記述、およびそのサービス
記述を用いて全体制御を行うシステムの標準モデルをそれぞれ定義することを目標とする。
また、それらの標準的なサービス記述やシステムモデルの実現性や有効性の検証、さらなる洗練
の為に、前述の様にロボットが活躍できるロボットタウンのマネジメントシステム(TMS:Town
Management System)を試作し、実証実験を行うことも目標とする。
結果:
4)の研究結果により、研究目標を達成できた。
3)研究方法/調査方法
環境に分散配置されたセンサ、メモリからの情報管理及び、その情報を基にした自律ロボットの行動制御
を実現するマネジメント機構について研究する。予め全てのセンサ群やロボット群、環境の情報が既知であ
り、かつ固定であれば、通常のロボットシステムのスケールを拡張したロボット制御のマネジメント機構で済
む。しかし、人間・ロボット共生社会では、センサやロボット、環境の状態は、常に変化する。また、要求され
るロボットサービスの内容も変化する。この変化に対応できるマネジメント機構の構築を目標とする。
これまで,九州日本電気ソフトウェア(株)は,物流,小売,交通,金融,製造等のマネジメント機構の研
究・開発を行なってきた。これらの知見から、次世代ロボット技術のためのマネジメント機構では、(1)ロ
ボットサービスの記述、(2)サービスを実現するためのセンサやロボット、環境のモデル化とモジュール化、
(3)全体システムの設計と検証が重要と考え、研究を進める。
マネジメント機構におけるサービスの記述は、個別のロボットに依存しないものにしなければならない。こ
のため、環境情報活用に関連する各種技術等の成果や既存の標準等を広く調査し、ロボットや環境セン
サ等の個々の要素が連携する際に使用するサービスとはどのようなものかを考え、そのサービス記述の定
義を試みる。ロボットや環境センサ等の各種構成要素に対応した機能は、このサービス記述に基づき、制
御情報や環境情報等を効果的に受け渡しできるようにモジュール化する。これらを結合し、全構成要素を
管制するロボットマネジメントサーバーを九州日本電気ソフトウェア(株)が所有するモジュール化設計技
37
術や基盤ソフトウェア技術,ミドルウェア技術を活かして実現する。これらを通して、ロボットタウンマネジメ
ント機構における標準モデルとは何かを実証的に明らかにしていく。
実証実験のフェーズでは、ロボットと人間が融合した街全体のマネジメント、さらに各種既存インフラシス
テムと連携した研究を行なう。これにより、ロボット技術により支援される、より安全かつ安心のタウンマネジ
メントシステムを実現する。
研究項目としては、以下の2つを行う。研究は、サブテーマ責任者の馬場と各研究項目の担当者が共
同で、相互に連携しながら実施する。
研究項目①ロボットが環境情報を有効活用する為の標準システム確立に関する研究
先ず、ロボット技術、IT技術、各種センシング技術の成果や既存の標準等を調査し、これらをマネジメント
機構において統合・活用するためのサービス記述の定義を行なう。また、そのサービス記述で使用される環
境情報を提供する各種装置、およびロボットをモデル化する。このサービス記述とモデルを全体制御するシ
ステムの標準モデルを作成する。これらの有効性を定性分析により検証し、標準システムの確立を目指す。
研究項目②環境情報を活用したロボットのマネジメントシステム実現に関する研究
ロボットが環境情報を有効活用する為に定義されたサービス記述とシステムモデルに基づき、ロボット
マネジメントシステムを試作する。その実装上の評価を行うと共に、実証実験を通してサービス記述やモ
デル定義の有効性の検証する。さらに、一般に提供可能な汎用的な基盤部品を構築し、ロボットマネジメ
ントからタウンマネジメントへと拡張する。
マネジメントサーバやその他の各構成要素は分散オブジェクト技術を活用して全体的なマネジメントシス
テムとして統合する。また、そのシステムにおける一般利用の為の基盤部分は、分散オブジェクト技術におけ
るサービスや部品の形式で汎用利用が可能なように実現し、その展開、普及を図ることができるものにする。
研究項目③環境情報を活用したロボットのマネジメントシステム実現に関する研究
ロボットが環境情報を有効活用できるマネジメントシステムを実現する為、先ずは参考となる各種既存
実装技術を広く収集、整理、分析し、マネジメントシステムの実装方式や試作の方向性を検討する。
4)研究結果
各年度の研究結果を以下に示す。
平成 17 年度
①ロボットが環境情報を有効活用する為の標準システム確立に関する研究
ロボットが環境情報を有効活用できるサービス記述、及びシステムモデルの標準確立の為、参考と
なる各種既存技術の成果や標準を広く収集、整理、分析し、標準の基本設計に対する要求を明確化
できた。
②環境情報を活用したロボットのマネジメントシステム実現に関する研究
ロボットが環境情報を有効活用できるマネジメントシステムを実現する為、参考となる各種既存実装
技術を広く収集、整理、分析し、マネジメントシステムの実装方式や試作の方向性を検討できた。
③情報構造化環境の標準的な管理プラットフォームに関する研究の推進、妥当性確認
本研究全体と環境情報関連の他研究との整合性確保、本研究における標準サービス・モデルの確
立方法及びそのマネジメントシステムの実装方式についての技術的な妥当性確認を行った。
平成18年度
ロボットが環境情報を有効活用できるサービス記述、ならびにシステムモデルの標準の枠組みを定義

38
し、本課題における環境情報関連の他サブテーマとの整合性を確保しながら、実装方式や試作について
検討を実施した。
また、上記検討結果に基づき TMS を実装し、その有効性と性能を実証実験を通して検証した。
平成 19 年度
前年度の研究成果に踏まえて TMS の改良と機能拡張を行い、多種類のロボット、環境センサとの接
続実験により、環境構造化プラットフォームとしての機能を実証した。また、ドキュメント類、サンプル、イン
ストーラなどを作成し、研究成果を外部へ提供できるような環境を整備した。
5)考察・今後の発展等
環境情報を制御・管理するタウンマネジメントシステムの設計と実装を行うと共に、タウンマネジメントシ
ステムを用いたロボット実証実験を通して、その機能を検証した。今後は、タウンマネジメントシステムの公
開を行い、外部研究者による利用を求めると共に、利用者への技術サポートを行う。
6)関連特許
該当なし
7)研究成果の発表
(成果発表の概要)
1. 原著論文(査読付き) 該当なし
2. 上記論文以外による発表 該当なし
3. 口頭発表 応募講演:1 回
4. 特許出願 該当なし
5. 受賞件数 該当なし
1. 原著論文(査読付き)
該当なし
2. 上記論文以外による発表
該当なし
3. 口頭発表
主催・応募講演
1) 馬場伸一, 吉垣伸介, 丸山博史, 黒瀬光彦, 殷中翔, 村上剛司, 木室義彦, 長谷川勉:「ロボッ
トタウンの実証的研究-タウンマネジメントシステムの開発-」,岡山大学,第 24 回日本ロボット学
会学術講演会, 2006.9
4. 特許出願
該当なし
5. 受賞件数
該当なし

39
Ⅳ.実施期間終了後における取組みの継続性・発展性
今後の展開として、福岡市博多湾内の人工埋立地「アイランドシティ」にある一戸建て住宅の内部とそ
の周辺区域に構築した環境情報構造化プラットフォーム(ロボットタウン)の公開を行う。公開へ向けて地
元自治体との協力体制を整えており、プラットフォームの維持管理に関して福岡市から住宅を貸与頂くな
ど,様々な支援を受けている。公開に際しては、ハードウェアであるロボット実験環境に加えて、ソフトウェ
アとして、環境情報の制御・管理するマネジメント技術の研究成果であるタウンマネジメントシステムも提
供する。タウンマネジメントシステムの利用マニュアル、サンプルプログラム、ソフトウェアインストーラなどを
整備済みである。プラットフォームの活用により、新しいロボットアプリケーションが創出されることを期待し
ている。
また、本研究課題の成果を広く利用してもらうため、経済産業省による次世代ロボット知能化技術開発
プロジェクトなどロボット関係の諸プロジェクトに対して、本プラットフォームの利用の働きかけを行ってい
く。
40
Ⅴ.自己評価
1.目標達成度
環境センシング技術と、環境情報を制御・管理する環境マネジメント技術の開発を行い、研究当初に
掲げたミッションステートメントを全て達成することができた。また、構築した環境情報構造化プラットフォー
ムを公開するため、利用マニュアル、サンプルプログラム、ソフトウェアインストーラの整備を行うなど、研究
終了後の展開のための準備を整えることができた。
2.情報発信
一般公開による研究成果報告会およびロボット実証実験見学会を開催し、新聞、TV、Web など複数の
メディアでの報道を通して、本研究課題の主旨と成果を広く発信することができた。また、国内外における
ロボット関連の学術講演会において、本研究課題に関する講演発表を行い、成果として公開する環境情
報構造化プラットフォームのユーザとして想定しているロボット研究者への情報発信を行った。
3.研究計画・実施体制
本研究課題の参画機関は、研究の推進に必要となる環境センシング技術、情報のマネジメント技術お
よび、ロボット制御技術などの各種技術をそれぞれ有しており、それらの技術を統合することで、課題を達
成することができた。外部有識者からの指導や評価を受ける場として、技術調査会を実施すると共に、運
営委員会の設置を行った。運営委員会には、研究者のほか、県と市など地元自治体および省庁のロボッ
ト関連施策担当者に参加頂き、本研究課題とロボット振興に係わる行政諸施策との連携を取った。また、
病院でのロボット実験に際しては、病院の倫理審査委員会による倫理・安全に関する承認を受けるなど、
必要に応じて異分野・異業種の専門家とも連携を取りながら研究を行った。
4.実施期間終了後における取り組みの継続性・発展性
本研究課題の成果として、福岡市博多湾内の人工埋立地「アイランドシティ」にある一戸建て住宅の内
部とその周辺区域に構築した環境情報構造化プラットフォーム(ロボットタウン)を公開することで、本研究
課題の継続性を確保できる。公開へ向けて地元自治体との協力体制を整えており、プラットフォームの維
持管理に関して福岡市から住宅を貸与頂くなど、様々な支援を受けている。公開に際しては、ハードウェ
アであるロボット実験環境に加えて、ソフトウェアとして、環境情報の制御・管理するマネジメント技術の研
究成果であるタウンマネジメントシステムも提供する。タウンマネジメントシステムの利用マニュアル、サン
プルプログラム、ソフトウェアインストーラなどを整備済みである。外部研究者によるプラットフォームの活
用により、新しいロボットアプリケーションの創出など、本研究成果のさらなる発展が期待できる。また、経
済産業省による次世代ロボット知能化技術開発プロジェクトなどロボット関係の諸プロジェクトに対して、本
プラットフォームの利用の働きかけを継続的に行い、本研究課題の発展を目指す。