Embed Size (px)
Citation preview
ma
cenidet Centro Nacional de Investigación y Desarrollo Tecnológico
Coordinación de Mecatrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Diseño de un Equipo Auxiliar en Terapias de Rehabilitación de Extremidades de Miembro
Superior a Nivel de Dedos”
presentada por:
Jorge Aurelio Brizuela Mendoza Ing. en Electrónica por el I. T. de Ciudad Guzmán
José Hugo Soto Yuriar Ing. en Sistemas Computacionales por el I. T. Superior de Cajeme
como requisito para obtener el grado de: Maestro en Ciencias en Ingeniería Mecatrónica
Directores de tesis: Dr. Marco A. Oliver Salazar
Dr. Dariusz Szwedowicz Wasik
Cuernavaca, Morelos, México 10 de Diciembre de 2010

cenidet Centro Nacional de Investigación y Desarrollo Tecnológico
Coordinación de Mecatrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Diseño de un Equipo Auxiliar en Terapias de Rehabilitación
de Extremidades de Miembro Superior a Nivel de Dedos”
presentada por:
Jorge Aurelio Brizuela Mendoza Ing. en Electrónica por I. T. de Ciudad Guzmán
José Hugo Soto Yuriar Ing. en Sistemas Computacionales por el I. T. Superior de Cajeme
como requisito para obtener el grado de: Maestro en Ciencias en Ingeniería Mecatrónica
Directores de tesis:
Dr. Marco A. Oliver Salazar
Dr. Dariusz Szwedowicz Wasik
Jurado: Dr. Enrique Quintero-Mármol Márquez
Dr. Andrés Blanco Ortega
Cuernavaca, Morelos, México. 10 de Diciembre de 2010


ii Diseño de un equipo para rehabilitación de dedos

DEDICATORIAS
Jorge Aurelio
A las personas que mediante su ejemplo me han llevado a ser lo que soy y lo que no soy, aquellos que con una palabra alegran mi vida.
Mis padres
Por el apoyo brindado durante la realización de este trabajo. Gracias, seguiremos adelante….
Tío Pedro

iv Diseño de un equipo para rehabilitación de dedos
AGRADECIMIENTOS
A Dios por permitirme vivir y crecer, por permitirme experimentarme a mí mismo en cada instante de mi vida.
A mi madre por saber todo de mí, aun cuando no lo digo.
A mi padre por ser como es, gracias por tu apoyo.
A mis hermanas Rosa Liliana y Laura Alicia por sonreír siempre al
verme, por esa mirada tierna y dulce.
A mis amigos por todo su apoyo.
Al Centro Nacional de Investigación y Desarrollo Tecnológico por
haberme abierto las puertas y con ello, crecer profesionalmente.
A mi compañero de tesis Hugo por permitirme aprender de él todo lo que aprendí, gracias Huguito……
A mis compañeros de Maestría, Omar, Cesar, Elizabeth, Miguel y
Mara por todo lo que superamos juntos.
A mis asesores de tesis, Dr. Marco Antonio Oliver Salazar y Dr. Dariusz Szwedowicz Wasik, por los conocimientos entregados.
A la DGEST por el apoyo brindado.
Jorge Aurelio
Hay hombres que luchan un día y son buenos. Hay otros que luchan un año y son mejores.
Hay quienes luchan muchos años y son muy buenos. Pero hay los que luchan toda la vida:
esos son los imprescindibles.
Bertoldt Brecht

vi Diseño de un equipo para rehabilitación de dedos

Dedicatoria
A las personas que me han dado más que la vida y que aún en este punto me siguen apoyando para alcanzar mis sueños...
Mis Padres.
A la persona que Dios quiso fuera mi compañera a lo largo de este camino, gracias por tanto apoyo y confianza…
Dulce
Hugo

viii Diseño de un equipo para rehabilitación de dedos
Agradecimientos
En particular a Dios, por darme la oportunidad de vivir está
experiencia y alcanzar una meta más en mi vida.
Al Centro Nacional de Investigación y Desarrollo Tecnológico (cenidet)
por la oportunidad otorgada al aceptarme como aspirante y por la
formación académica que me otorgó.
A mis hermanos Paco, Elena y Angélica, por su apoyo; a mis sobrinos
Briana, Jennifer y Xavier Alejandro por su cariño.
A los doctores Dariusz Szwedowicz Wasik y Marco A. Oliver Salazar
por su confianza, apoyo e interés.
A nuestros revisores Dr. Enrique Quintero-Mármol y Dr. Andrés Blanco
por su tiempo invertido en este proyecto y por sus comentarios.
A mi compañero Jorge Aurelio por su tenacidad y entusiasmo para
buscar siempre una mejor solución, pero sobre todo por su amistad.
A mis compañeros de generación que más que amigos fueron mi familia
en esta etapa de mi vida: César, Miguel, Omar, Emmanuel y Ely.
A todas aquellas personas que con las que conviví durante mi estancia
en la institución, pero sobre todo a: Paz, Peter, Carlos, Omar, Mike,
Tomás, Ricardo, Rodo y Juanito; gracias amigos.
A todos y cada uno del personal docente que intervino en mi formación
como MC dentro del cenidet, que con sus defectos y virtudes nos han
transmitido un gran conocimiento.
Por último, a la Dirección General de Educación Superior Tecnológica
(DGEST) por el apoyo brindado.
José Hugo
x Diseño de un equipo para rehabilitación de dedos

RESUMEN
El presente documento de investigación contiene el diseño y construcción de un dispositivo de
ayuda en fisioterapia de extremidades del miembro superior a nivel de dedos. Este sistema
puede ser empleado en terapias activas o pasivas, entendiendo una terapia activa como la
terapia que realiza una persona mediante la ejecución de movimientos por sí mismo, mientras
que la terapia pasiva, por su parte, requiere de un dispositivo o aparato encargado de realizar
estos movimientos.
El dispositivo de ayuda en fisioterapia, constituido por subsistemas electrónicos, mecánicos y
computacionales, permite mediante ajustes mecánicos la adecuación a diferentes tamaños de
dedos y manos tanto de la extremidad derecha como izquierda, generando con ello un sistema
versátil acoplable para personas adultas o niños.
Para su operación, el dispositivo utiliza como actuadores músculos neumáticos con
comportamiento similar al músculo biológico, mismos que proporcionan la fuerza necesaria
para realizar el movimiento en la extremidad. Con referencia en el acoplamiento intrínseco
existente entre cada una de las secciones de los dedos, este dispositivo realiza su flexión y
extensión, considerados los movimientos más comunes en las terapias ocupacionales.
El control de este dispositivo mecatrónico se lleva a cabo desde un equipo de cómputo
haciendo uso de un software construido en el ambiente de desarrollo LabVIEW. Este software
permite la configuración de las terapias seleccionando la mano y los dedos a rehabilitar, para
su ejecución, se comunica digitalmente con un subsistema electrónico encargado de generar el
movimiento. Adicionalmente, esta sección del equipo fisioterapéutico permite mediante la
manipulación de una base de datos, el ingreso de la información personal de cada paciente y
archivo de las sesiones terapéuticas realizadas, agregando con ello una referencia de la
evolución terapéutica de cada uno de ellos.
El diseño y construcción, pruebas al equipo y justificantes de esta investigación, se presentan
en secciones posteriores de este documento, concluyendo al final con una comparativa entre
los trabajos existentes referentes a este tema y el dispositivo de ayuda en fisioterapia
construido.

xii Diseño de un equipo para rehabilitación de dedos
ABSTRACT
This research work presents the design and construction of a supporting device in
physiotherapy sessions to improve de movement of the upper limbs at fingers. This system can
be used for active or passive therapies, understanding an active therapy like the one which
makes a person by the execution of moves by itself, while passive therapy, in turn, requires a
device or unit responsible for carrying out these movements.
The assistive device in physiotherapy enables the adaptation by mechanical settings to
different size fingers and hands of both the right and left limb, thereby creating a versatile
system coupled to both adults and children.
For its operation, the device uses pneumatic muscles as actuators with similar behavior to the
one obtained from a biological muscle, which furnishes the necessary strength for the
movement of each finger. Flexion-extension is performed by using the dynamic coupling that
inherently exists in each one of the referred limbs.
The control of the mechatronic device is carried out from a computer equipment using
software built into the LabVIEW development environment. This software allows the selection
of the hand and fingers to be rehabilitated and for its execution, communicates digitally with
an electronic subsystem responsible for generating the movement in the fingers. Additionally,
this section allows, by manipulating a database, entering personal information of each patient
and his therapy sessions, thus adding a reference of the therapeutic evolution of each of them.
The design and construction of the device, testing and justifications for this research are
presented in later sections of this document, concluding at the end with a comparison
between existing works concerning to this topic and the system built.

xiv Diseño de un equipo para rehabilitación de dedos
Tabla de contenido Lista de figuras................................................................................................................. xvii
Lista de tablas................................................................................................................... xix
Acrónimos ........................................................................................................................ xxi
Simbología ..................................................................................................................... xxiii
1. Introducción....................................................................................................................1
1.1. Objetivo general y objetivos particulares .....................................................................2
1.2. Alcances y limitaciones ...............................................................................................2
1.3. Definición del problema .............................................................................................3
1.4. Justificación ...............................................................................................................4
1.5. Organización de la tesis ..............................................................................................4
Bibliografía y Referencias ..................................................................................................5
2. Estado del Arte ................................................................................................................7
2.1. El sistema muscular humano.......................................................................................7
2.2. La mano humana .......................................................................................................8
2.3. Lesiones de la mano humana ....................................................................................10
2.3.1. Lesiones Vasculares ...........................................................................................11
2.3.2. Lesiones Nerviosas .............................................................................................11
2.3.3. Lesiones tendinosas de la mano..........................................................................11
2.4. Patologías de la mano humana y rehabilitación..........................................................11
2.5. El músculo neumático ..............................................................................................12
2.6. Desarrollos tecnológicos orientados a fisioterapias ....................................................13
2.7. Desarrollos comerciales orientados a rehabilitación ...................................................14
2.8. Desarrollos con músculos neumáticos .......................................................................15
2.9. Prótesis robot ..........................................................................................................16
Bibliografía y Referencias ................................................................................................19
3. Diseño y desarrollo del prototipo ...................................................................................21
3.1. Sistema mecánico ....................................................................................................21
3.1.1. Diseño de componentes .....................................................................................22
3.1.2. Sistema de transmisión de movimiento ...............................................................24
3.1.3. Actuadores ........................................................................................................25
3.1.4. Anillos ...............................................................................................................26
3.1.5. Cálculos requeridos............................................................................................26
3.2. Sistema electrónico ..................................................................................................31
xvi Diseño de un equipo para rehabilitación de dedos
3.2.1. Etapas del sistema electrónico ............................................................................32
3.2.2. Diseño de circuito impreso .................................................................................34
3.3. Interfaz gráfica de usuario ........................................................................................35
Bibliografía y Referencias ................................................................................................42
4. Validación experimental del prototipo............................................................................43
4.1. Comunicación interfaz de operador-sistema electrónico ............................................43
4.2. Caracterización de tiempos de sesión terapéutica ......................................................44
4.3. Lectura/escritura de archivos en software de sistema ................................................45
4.3.1. Captura de datos personales del paciente ...........................................................45
4.3.2. Edición de información.......................................................................................46
4.3.3. Eliminación de paciente .....................................................................................46
4.3.4. Actualización del archivo de historial...................................................................47
4.3.5. Paro de emergencia ...........................................................................................47
4.4. Pruebas operación continua .....................................................................................48
4.5. Flexión generada por el prototipo en los dedos..........................................................49
4.6. Pruebas en campo....................................................................................................51
5. Conclusiones y recomendaciones ...................................................................................55
5.1 Comparativa con trabajos presentados en el estado del arte .......................................58
5.2 Recomendaciones para trabajos futuros.....................................................................58
Anexos ..............................................................................................................................61
Anexo A: Comparativa entre distintos tipos de actuadores................................................63
Anexo B: Planos de ensamblajes y componentes ..............................................................65
Anexo C: Hojas de datos de los principales componentes electrónicos ...............................95
Anexo D: Firmware del microcontrolador....................................................................... 101
Anexo E: Pantallas dentro del evento “Pacientes y terapias” ........................................... 107
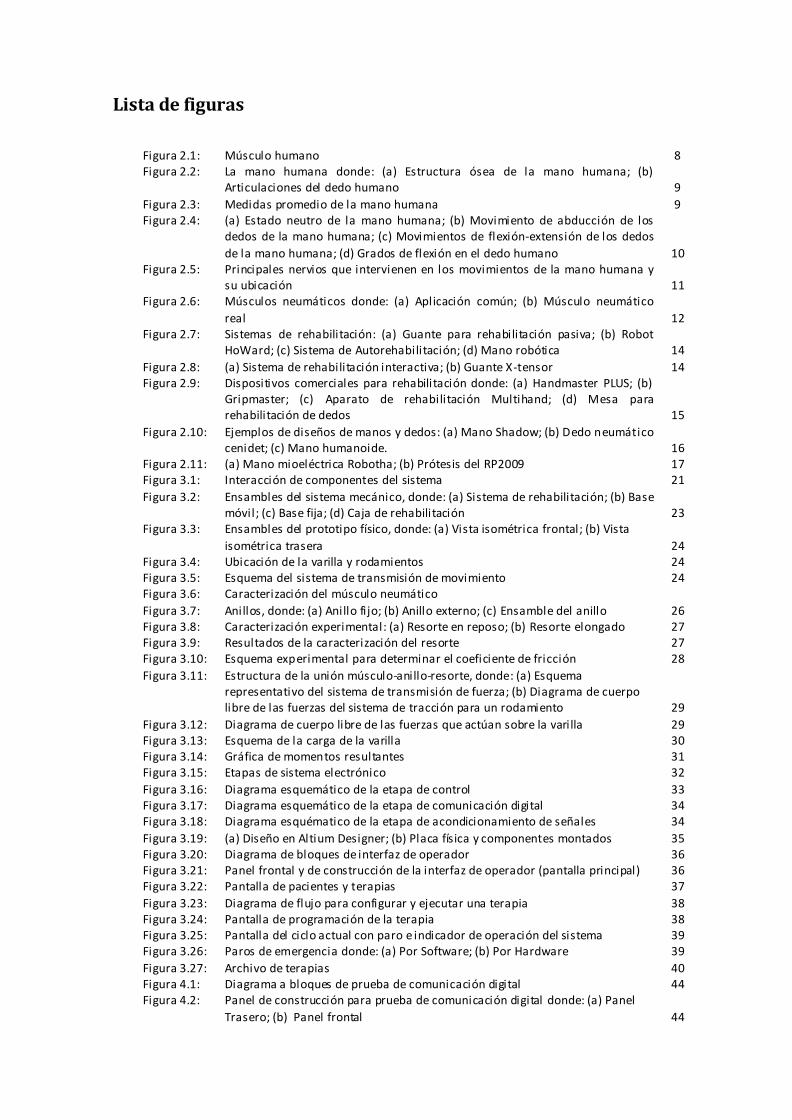
Lista de figuras
Figura 2.1: Músculo humano 8 Figura 2.2: La mano humana donde: (a) Estructura ósea de la mano humana; (b)
Articulaciones del dedo humano 9
Figura 2.3: Medidas promedio de la mano humana 9 Figura 2.4: (a) Estado neutro de la mano humana; (b) Movimiento de abducción de los
dedos de la mano humana; (c) Movimientos de flexión-extensión de los dedos
de la mano humana; (d) Grados de flexión en el dedo humano 10 Figura 2.5: Principales nervios que intervienen en los movimientos de la mano humana y
su ubicación 11 Figura 2.6: Músculos neumáticos donde: (a) Aplicación común; (b) Músculo neumático
real 12 Figura 2.7: Sistemas de rehabilitación: (a) Guante para rehabilitación pasiva; (b) Robot
HoWard; (c) Sistema de Autorehabilitación; (d) Mano robótica 14
Figura 2.8: (a) Sistema de rehabilitación interactiva; (b) Guante X-tensor 14 Figura 2.9: Dispositivos comerciales para rehabilitación donde: (a) Handmaster PLUS; (b)
Gripmaster; (c) Aparato de rehabilitación Multihand; (d) Mesa para rehabilitación de dedos 15
Figura 2.10: Ejemplos de diseños de manos y dedos: (a) Mano Shadow; (b) Dedo neumático cenidet; (c) Mano humanoide. 16
Figura 2.11: (a) Mano mioeléctrica Robotha; (b) Prótesis del RP2009 17 Figura 3.1: Interacción de componentes del sistema 21
Figura 3.2: Ensambles del sistema mecánico, donde: (a) Sistema de rehabilitación; (b) Base móvil; (c) Base fija; (d) Caja de rehabilitación 23
Figura 3.3: Ensambles del prototipo físico, donde: (a) Vista isométrica frontal; (b) Vista
isométrica trasera 24 Figura 3.4: Ubicación de la varilla y rodamientos 24 Figura 3.5: Esquema del sistema de transmisión de movimiento 24 Figura 3.6: Caracterización del músculo neumático
Figura 3.7: Anillos, donde: (a) Anillo fi jo; (b) Anillo externo; (c) Ensamble del anillo 26 Figura 3.8: Caracterización experimental: (a) Resorte en reposo; (b) Resorte elongado 27 Figura 3.9: Resultados de la caracterización del resorte 27 Figura 3.10: Esquema experimental para determinar el coeficiente de fricción 28
Figura 3.11: Estructura de la unión músculo-anillo-resorte, donde: (a) Esquema representativo del sistema de transmisión de fuerza; (b) Diagrama de cuerpo libre de las fuerzas del sistema de tracción para un rodamiento 29
Figura 3.12: Diagrama de cuerpo libre de las fuerzas que actúan sobre la varilla 29 Figura 3.13: Esquema de la carga de la varilla 30 Figura 3.14: Gráfica de momentos resultantes 31 Figura 3.15: Etapas de sistema electrónico 32
Figura 3.16: Diagrama esquemático de la etapa de control 33 Figura 3.17: Diagrama esquemático de la etapa de comunicación digital 34 Figura 3.18: Diagrama esquématico de la etapa de acondicionamiento de señales 34
Figura 3.19: (a) Diseño en Altium Designer; (b) Placa física y componentes montados 35 Figura 3.20: Diagrama de bloques de interfaz de operador 36 Figura 3.21: Panel frontal y de construcción de la interfaz de operador (pantalla principal) 36 Figura 3.22: Pantalla de pacientes y terapias 37
Figura 3.23: Diagrama de flujo para configurar y ejecutar una terapia 38 Figura 3.24: Pantalla de programación de la terapia 38 Figura 3.25: Pantalla del ciclo actual con paro e indicador de operación del sistema 39 Figura 3.26: Paros de emergencia donde: (a) Por Software; (b) Por Hardware 39
Figura 3.27: Archivo de terapias 40 Figura 4.1: Diagrama a bloques de prueba de comunicación digital 44 Figura 4.2: Panel de construcción para prueba de comunicación digital donde: (a) Panel
Trasero; (b) Panel frontal 44

xviii Diseño de un equipo para rehabilitación de dedos
Figura 4.3: Archivo de pacientes y terapias previo al ingreso de un nuevo paciente 45
Figura 4.4: Ingreso de paciente a archivo de pacientes y terapias donde: (a) Datos personales de paciente nuevo; (b) Archivo correspondiente ordenado 46
Figura 4.5: Modificación de paciente donde: (a) Modificación de campos; (b) Actualización
de archivo 46 Figura 4.6: Proceso de eliminación de los datos del paciente donde: (a) Pantalla de
eliminar; (b) Archivo sin paciente eliminado 47 Figura 4.7: Resultado final de la terapia donde: (a) Indicador de finalización de terapia; (b)
Actualización del historial 47 Figura 4.8: Paro de emergencia por software 48 Figura 4.9: Paro de emergencia por hardware 48
Figura 4.10: Prueba al prototipo con carga 48 Figura 4.11: Historial en prueba con carga 49 Figura 4.12: Simbolización de ángulos por falange 49 Figura 4.13: Posiciones iniciales de cada dedo en el prototipo donde: (a) Indice; (b)
Medio; (c) Anular; (d) Meñique 50 Figura 4.14: Posiciones finales de cada dedo en el prototipo donde: (a) Indice; (b)
Medio; (c) Anular; (d) Meñique 51 Figura 4.15: Prototipo bajo prueba en campo 51
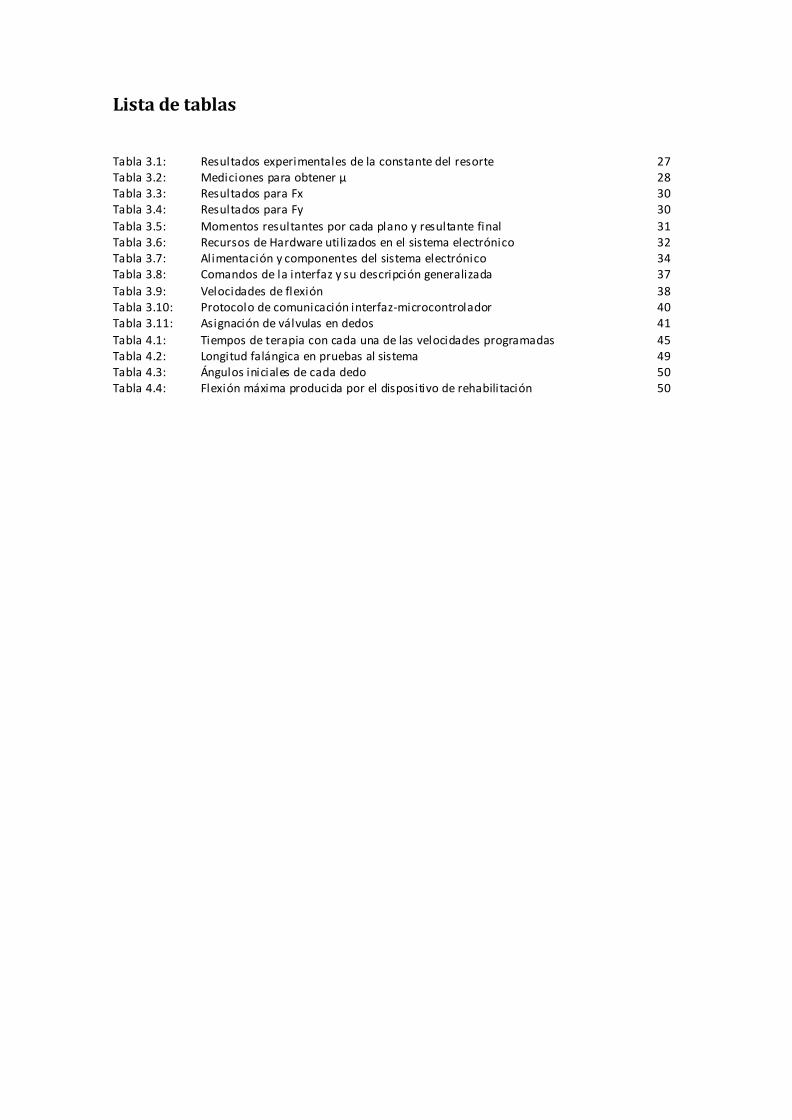
Lista de tablas
Tabla 3.1: Resultados experimentales de la constante del resorte 27 Tabla 3.2: Mediciones para obtener µ 28 Tabla 3.3: Resultados para Fx 30 Tabla 3.4: Resultados para Fy 30
Tabla 3.5: Momentos resultantes por cada plano y resultante final 31 Tabla 3.6: Recursos de Hardware utilizados en el sistema electrónico 32 Tabla 3.7: Alimentación y componentes del sistema electrónico 34 Tabla 3.8: Comandos de la interfaz y su descripción generalizada 37
Tabla 3.9: Velocidades de flexión 38 Tabla 3.10: Protocolo de comunicación interfaz-microcontrolador 40 Tabla 3.11: Asignación de válvulas en dedos 41
Tabla 4.1: Tiempos de terapia con cada una de las velocidades programadas 45 Tabla 4.2: Longitud falángica en pruebas al sistema 49 Tabla 4.3: Ángulos iniciales de cada dedo 50 Tabla 4.4: Flexión máxima producida por el dispositivo de rehabilitación 50

xx Diseño de un equipo para rehabilitación de dedos
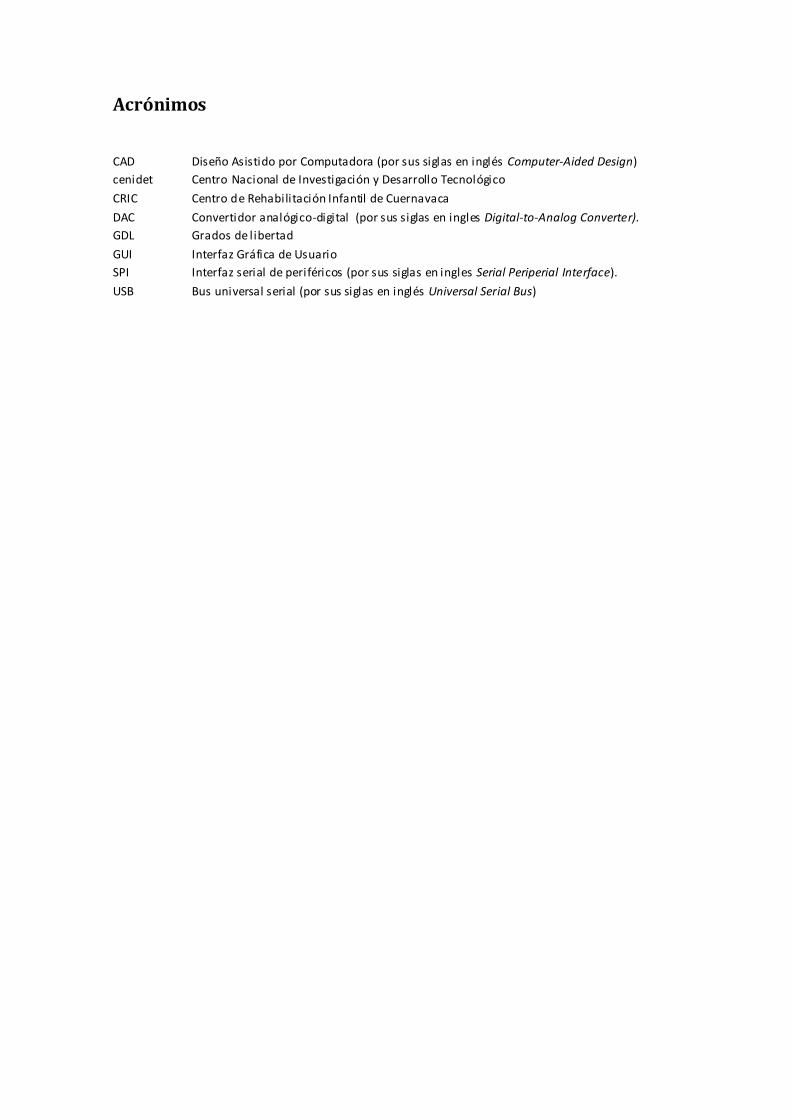
Acrónimos
CAD Diseño Asistido por Computadora (por sus siglas en inglés Computer-Aided Design)
cenidet Centro Nacional de Investigación y Desarrollo Tecnológico
CRIC Centro de Rehabilitación Infantil de Cuernavaca
DAC Convertidor analógico-digital (por sus siglas en ingles Digital-to-Analog Converter).
GDL Grados de libertad
GUI Interfaz Gráfica de Usuario
SPI Interfaz serial de periféricos (por sus siglas en ingles Serial Periperial Interface).
USB Bus universal serial (por sus siglas en inglés Universal Serial Bus)

xxii Diseño de un equipo para rehabilitación de dedos
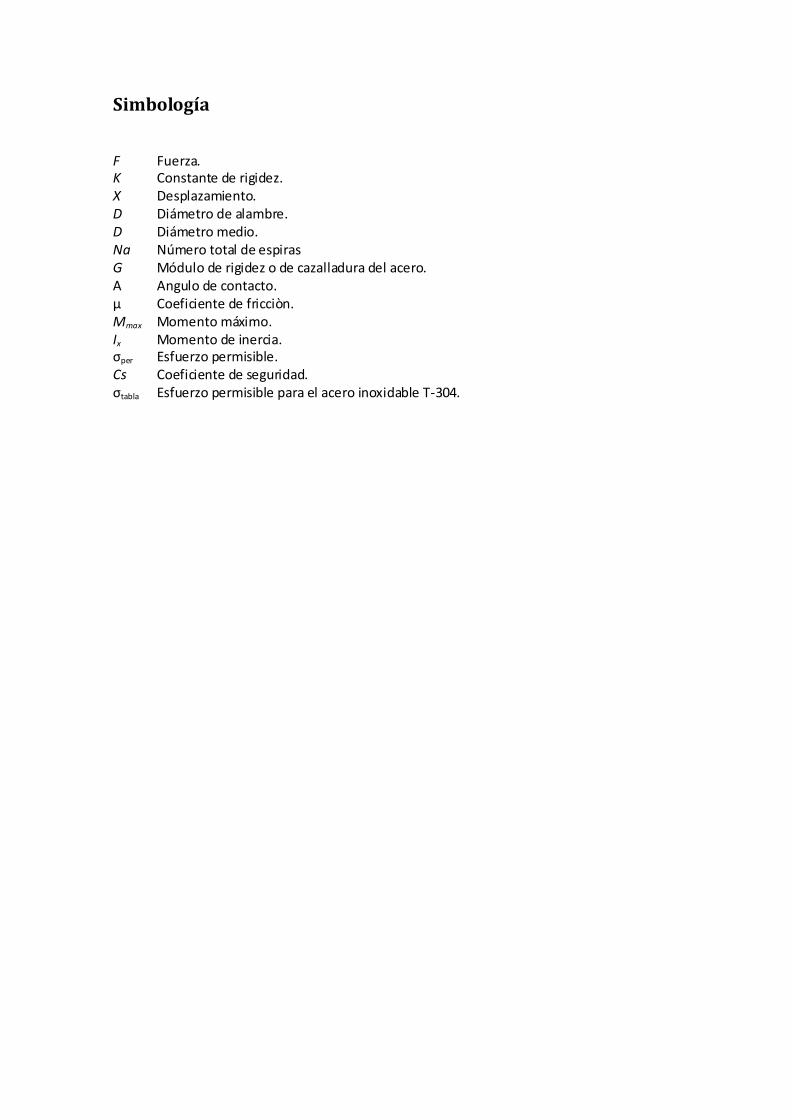
Simbología
F Fuerza. K Constante de rigidez. X Desplazamiento. D Diámetro de alambre. D Diámetro medio. Na Número total de espiras G Módulo de rigidez o de cazalladura del acero. Α Angulo de contacto. µ Coeficiente de fricciòn. Mmax Momento máximo. Ix Momento de inercia. σper Esfuerzo permisible. Cs Coeficiente de seguridad. σtabla Esfuerzo permisible para el acero inoxidable T-304.

xxiv Diseño de un equipo para rehabilitación de dedos
1
1. Introducción Un aspecto importante en la evaluación y desarrollo de nuevas aplicaciones robóticas, reside
en el uso y potenciación de los actuadores que constituyen a un robot. Uno de los actuadores
que actualmente es sujeto de estudio dadas sus características, es el músculo neumático.
El músculo neumático es un mecanismo basado en la imitación del comportamiento del
músculo biológico. Concretamente, se trata de un tubo flexible, el cual es una combinación de
material homogéneo y elástico envuelto en una red de fibras trenzadas a modo de esfuerzo. Al
aplicar aire a presión, el tubo se deforma aumentando su diámetro, produciéndose una fuerza
de tracción axial y un movimiento de contracción.
Por otro lado, la diversidad de aplicaciones robóticas han evolucionado en gran medida a la
concepción de robots con su propia morfología1. Entre los robots dedicados a aplicaciones no
industriales destacan los robots espaciales, militares, agrícolas, y de aplicación médica.
Algunos propósitos particulares de los robots dedicados a tareas médicas son el desarrollo de
prótesis robóticas, sistemas de ayuda de discapacitados, dispositivos de rehabilitación, entre
otros [1.1].
1 Disciplina que estudia la generación y las propiedades de la forma. Se aplica en casi todas las ramas del diseño.
2 Diseño de un equipo para rehabilitación de dedos
Diversos trabajos han sido realizados bajo el tema de rehabilitación, sin embargo, la mayoría
de ellos presentan características limitadas de operación como lo son ajustes a diferentes
tamaños de manos, dedos y tipos de ejercicios, caso contrario al dispositivo presentado en
este documento.
Es por ello que dentro del Centro Nacional de Investigación y Desarrollo Tecnológico (cenidet),
se han desarrollado una serie de trabajos motivados al diseño de efectores que reproduzcan
algunos movimientos de la mano humana, siendo para el caso concreto de este reporte de
tesis, el de un dispositivo mecatrónico para ayuda en procesos de rehabilitación de dedos
utilizando músculos neumáticos como actuadores.
1.1. Objetivo general y objetivos particulares El objetivo de este trabajo consiste en el diseño y construcción un dispositivo mecatrónico de 4
grados de libertad (GDL), uno por cada dedo a rehabilitar: índice, medio, anular y meñique;
accionado por músculos neumáticos capaz de ayudar en procesos de rehabilitación.
Mediante este dispositivo el paciente puede realizar tanto terapia activa (movimientos
realizados por el paciente) como terapia pasiva (movimientos generados por un aparato en el
paciente).
Con referencia a este objetivo general y el ámbito en el que se centra esta investigación,
destacan los siguientes objetivos particulares:
Utilizar los conocimientos adquiridos previamente en este ámbito (efectores
morfológicos) dentro de cenidet para integrar un sistema con mayor aplicación
práctica.
Construir un dispositivo de ayuda para personas con discapacidad en dedos fácilmente
manipulable por personas ajenas a lenguaje técnico ingenieril (fisioterapistas).
Incorporar en el sistema la facultad de realizar iterativamente movimientos de un
dedo independiente o en conjunto, además de la velocidad variable de los mismos.
Permitir el ajuste a diferentes tamaños de manos y dedos mediante acciones
mecánicas, con la finalidad de que el dispositivo sea más versátil.
1.2. Alcances y limitaciones Tomando en cuenta cada uno de los objetivos particulares y sin perder de vista el objetivo
general, se plantean los siguientes alcances:
i. Diseño de un equipo auxiliar en terapias (activa y pasiva) de rehabilitación de
miembro superior a nivel de dedos accionado por músculos neumáticos que pueda
ser empleado en ambas manos y que sea adaptable a distintos tamaños de dedos.
ii. Construcción de un prototipo en MDF (material hecho a base de fibras de madera),
para llevar a cabo las pruebas necesarias.
iii. El dispositivo diseñado deberá ser capaz de realizar los movimientos más comunes
en tareas de rehabilitación de los dedos de la mano humana.
iv. Creación de un historial de pacientes con fechas de terapias, tipos de movimiento
y frecuencia de movimiento.

Introducción 3
v. Diseño y programación de una interfaz gráfica de usuario (GUI) que permita
configurar terapias con distintas velocidades y ángulos de flexión.
vi. Diseño y programación del control mínimo necesario para la manipulación de las
velocidades y características de los movimientos fisioterapéuticos.
vii. Diseño y construcción de la interfaz electrónica encargada de las funciones
operativas del sistema.
viii. Pruebas al dispositivo en laboratorio.
ix. Pruebas al dispositivo en campo dependiendo de la disponibilidad de médicos y
pacientes
De la misma manera se menciona que esta tesis está limitada a:
I. No se rehabilita dedo pulgar.
II. No se considera control en lazo cerrado.
III. No hay sensado de posición y fuerza de los dedos durante su trayectoria de
movimiento.
1.3. Definición del problema A través del tiempo, el hombre ha intentado descifrar el funcionamiento de todo lo que lo
rodea incluido su propio cuerpo. Actualmente, gracias a los avances tecnológicos, han sido
desarrollados inmensidad de dispositivos mecánicos y electromecánicos capaces de
desempeñar alguna función específica del cuerpo humano. Este tipo de trabajos han sido
aplicados a las necesidades de la medicina en particular al área de rehabilitación de
extremidades, entendiendo un proceso de rehabilitación el camino para recuperar la
movilidad en una persona con algún tipo de lesión mediante movimientos repetitivos.
Las personas dedicadas a estas tareas realizan estos procesos manualmente teniendo como
limitante las posibles variaciones en la fuerza y posición de los movimientos producidos,
provocando con ello, el posible daño o molestias en el paciente. Aunado a esto, los
fisioterapistas carecen de tiempo suficiente para satisfacer las necesidades que demandan los
pacientes necesitados de estas tareas. Es por ello que surge la idea de la construcción de
dispositivos capaces de suplir las funciones terapéuticas, mismos que tienen como negativa el
costo, por lo cual, la gran mayoría de los centros dedicados a esta actividad no pueden
adquirirlos. Una vez superado el problema del costo inicial de adquisición del equipo
(generalmente de importación), surge la necesidad de proporcionarle mantenimiento
preventivo y correctivo y con ello los problemas de altos costos, adquisición de componentes y
tiempo en el que el equipo está fuera de servicio. Aunado a esto se tiene que los equipos
comerciales generalmente son inaccesibles cuando se requiere reprogramarlos para cubrir
nuevas secuencias de movimiento en las terapias.
Por otro lado, el CENIDET en los últimos años ha llevado a cabo investigaciones en el ámbito de
la robótica y la construcción de prototipos con distintas tecnologías, dentro de las cuales se
encuentran los músculos neumáticos. No obstante estos prototipos han dado la información
necesaria sobre los movimientos de la mano, el presente trabajo se enfocará a aplicaciones de
rehabilitación de pacientes con problemas motrices en sus extremidades superiores.
4 Diseño de un equipo para rehabilitación de dedos
1.4. Justificación La investigación se encuentra sustentada en los puntos detallados a continuación.
Aprovechar las investigaciones previamente realizadas en cenidet para desarrollar una
aplicación en terapias de rehabilitación activa y pasiva de pacientes.
El diseño de este dispositivo generará beneficios adicionales a las instituciones no
lucrativas que se dedican a brindar el servicio de rehabilitación de personas que la
requieran, esto debido a la construcción del sistema con un costo menor.
Con referencia en la versatilidad de este sistema, específicamente en cuanto a la
posibilidad de utilizarlo tanto en terapias activa como pasiva y el acoplamiento a
diferentes tamaños de manos y dedos, este dispositivo superará a los desarrollos e
investigaciones realizados, obteniendo con ello mayores prestaciones en rehabilitación
de pacientes.
El uso de músculos neumáticos como actuadores se encuentra justificado en que su
operación se asemeja de mejor manera al músculo biológico y presenta ventajas con
respecto a otros actuadores como los alambres musculares [1.2] y motores de CD [1.3]
(ver Anexo A).
El equipo de rehabilitación eliminará las posibles diferencias entre los movimientos
generados por el fisioterapista, dadas las características de los actuadores y el sistema
automatizado.
El dispositivo permitirá al fisioterapista realizar tareas de configuración y supervisión
de terapias, permitiendo con ello la posibilidad de mantenerlo un menor tiempo cerca
del proceso. Con esto como referencia se hace posible la ayuda a otros pacientes.
Este desarrollo, permitirá acumular conocimientos sobre el movimiento de la mano
humana para otras posibles aplicaciones.
1.5. Organización de la tesis El documento de tesis se encuentra constituido por 4 secciones más, las cuales describen el
sistema de rehabilitación mencionadas a continuación.
Capítulo 2. Estado del arte: Correspondiente a los trabajos existentes referentes a este
tema de investigación.
Capítulo 3. Diseño y desarrollo del prototipo: Explicación de la construcción de
prototipo.
Capítulo 4. Validación experimental del prototipo: Pruebas y resultados generados por
el sistema de rehabilitación.
Capítulo 5. Conclusiones y recomendaciones.
Introducción 5
Bibliografía y Referencias [1.1] Aguilar Acevedo Francisco y Ruiz González Román, “Diseño y construcción de un dedo
de cuatro grados de libertad accionado por músculos neumáticos antagonistas”, Tesis de Maestría, Cenidet, México, 2008.
[1.2] Iván Carrasco, Francisco Díaz, “Alambres musculares”, Departamento de Electrónica Universidad Técnica Federico Santa María, Valparaiso Chile, Junio 2003
[1.3] Francisco Alegría Zamudio, “Control Robusto de Motores de Corriente Directa Utilizando Modos Deslizantes”, CENIDET Diciembre 2007

6 Diseño de un equipo para rehabilitación de dedos
2
2. Estado del Arte Para facilitar la comprensión de esta tesis, es necesario presentar una serie de conceptos
relacionados con el sistema muscular humano, la anatomía de la mano y los dedos. Además se
presenta un estudio de la tecnología a emplear y los distintos trabajos que han sido
desarrollados en los últimos años alrededor del mundo.
A continuación se presenta el compendio de información en entorno a cada uno de los puntos
anteriores.
2.1. El sistema muscular humano El sistema muscular consta de los músculos esqueléticos y los lisos2. El aparato locomotor
cuenta con más de 650 músculos esqueléticos, unas estructuras carnosas, que en conjunto,
representan un 40% del peso corporal de un individuo adulto. Los tendones son unas bandas
alargadas ricas en fibras de colágeno, a través de las cuales los músculos se insertan en los
huesos. La función principal de los músculos es generar la fuerza que imprime movimiento y
mantiene en equilibrio el esqueleto.
La principal característica funcional de los músculos es la contractibilidad, la cual permite a
éstos llevar a cabo los movimientos necesarios para desplazar el esqueleto y generar las
tensiones requeridas, para mantener el cuerpo en equilibrio. Esta característica es posible
2 Los músculos lisos recubren la mayoría de los órganos huecos i nternos del cuerpo, como el estómago,
los intestinos y el útero.
8 Diseño de un equipo para rehabilitación de dedos
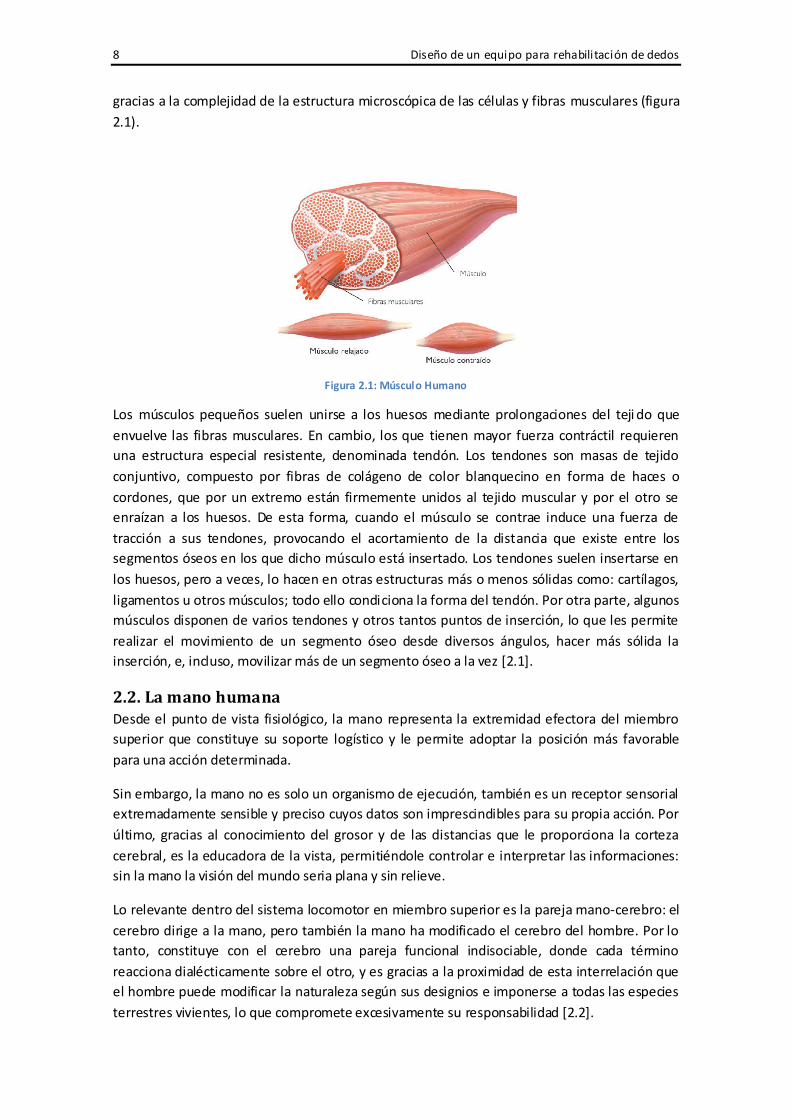
gracias a la complejidad de la estructura microscópica de las células y fibras musculares (figura
2.1).
Figura 2.1: Músculo Humano
Los músculos pequeños suelen unirse a los huesos mediante prolongaciones del teji do que
envuelve las fibras musculares. En cambio, los que tienen mayor fuerza contráctil requieren
una estructura especial resistente, denominada tendón. Los tendones son masas de tejido
conjuntivo, compuesto por fibras de colágeno de color blanquecino en forma de haces o
cordones, que por un extremo están firmemente unidos al tejido muscular y por el otro se
enraízan a los huesos. De esta forma, cuando el músculo se contrae induce una fuerza de
tracción a sus tendones, provocando el acortamiento de la distancia que existe entre los
segmentos óseos en los que dicho músculo está insertado. Los tendones suelen insertarse en
los huesos, pero a veces, lo hacen en otras estructuras más o menos sólidas como: cartílagos,
ligamentos u otros músculos; todo ello condiciona la forma del tendón. Por otra parte, algunos
músculos disponen de varios tendones y otros tantos puntos de inserción, lo que les permite
realizar el movimiento de un segmento óseo desde diversos ángulos, hacer más sólida la
inserción, e, incluso, movilizar más de un segmento óseo a la vez [2.1].
2.2. La mano humana Desde el punto de vista fisiológico, la mano representa la extremidad efectora del miembro
superior que constituye su soporte logístico y le permite adoptar la posición más favorable
para una acción determinada.
Sin embargo, la mano no es solo un organismo de ejecución, también es un receptor sensorial
extremadamente sensible y preciso cuyos datos son imprescindibles para su propia acción. Por
último, gracias al conocimiento del grosor y de las distancias que le proporciona la corteza
cerebral, es la educadora de la vista, permitiéndole controlar e interpretar las informaciones:
sin la mano la visión del mundo seria plana y sin relieve.
Lo relevante dentro del sistema locomotor en miembro superior es la pareja mano-cerebro: el
cerebro dirige a la mano, pero también la mano ha modificado el cerebro del hombre. Por lo
tanto, constituye con el cerebro una pareja funcional indisociable, donde cada término
reacciona dialécticamente sobre el otro, y es gracias a la proximidad de esta interrelación que
el hombre puede modificar la naturaleza según sus designios e imponerse a todas las especies
terrestres vivientes, lo que compromete excesivamente su responsabilidad [2.2].
Estado del Arte 9
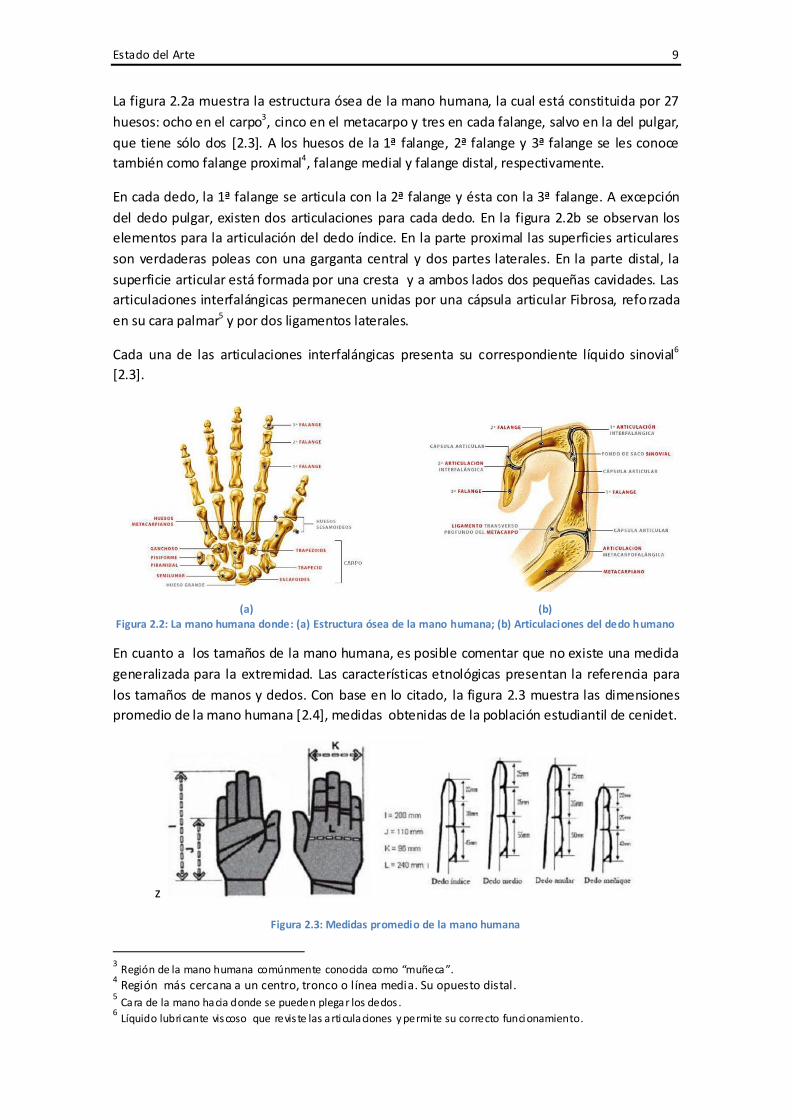
La figura 2.2a muestra la estructura ósea de la mano humana, la cual está constituida por 27
huesos: ocho en el carpo3, cinco en el metacarpo y tres en cada falange, salvo en la del pulgar,
que tiene sólo dos [2.3]. A los huesos de la 1ª falange, 2ª falange y 3ª falange se les conoce
también como falange proximal4, falange medial y falange distal, respectivamente.
En cada dedo, la 1ª falange se articula con la 2ª falange y ésta con la 3ª falange. A excepción
del dedo pulgar, existen dos articulaciones para cada dedo. En la figura 2.2b se observan los
elementos para la articulación del dedo índice. En la parte proximal las superficies articulares
son verdaderas poleas con una garganta central y dos partes laterales. En la parte distal, la
superficie articular está formada por una cresta y a ambos lados dos pequeñas cavidades. Las
articulaciones interfalángicas permanecen unidas por una cápsula articular Fibrosa, reforzada
en su cara palmar5 y por dos ligamentos laterales.
Cada una de las articulaciones interfalángicas presenta su correspondiente líquido sinovial6
[2.3].
(a) (b)
Figura 2.2: La mano humana donde: (a) Estructura ósea de la mano humana; (b) Articulaciones del dedo humano
En cuanto a los tamaños de la mano humana, es posible comentar que no existe una medida
generalizada para la extremidad. Las características etnológicas presentan la referencia para
los tamaños de manos y dedos. Con base en lo citado, la figura 2.3 muestra las dimensiones
promedio de la mano humana [2.4], medidas obtenidas de la población estudiantil de cenidet.
z
Figura 2.3: Medidas promedio de la mano humana
3 Región de la mano humana comúnmente conocida como “muñeca”.
4 Región más cercana a un centro, tronco o l ínea media. Su opuesto distal.
5 Cara de la mano hacia donde se pueden plegar los dedos .
6 Líquido lubricante viscoso que revis te las articulaciones y permite su correcto funcionamiento.

10 Diseño de un equipo para rehabilitación de dedos
Básicamente, los movimientos de los dedos de la mano son abducción, aducción, flexión y
extensión. Para definir cada uno de estos movimientos, se parte de la posición del estado
neutro de la mano como lo muestra la figura 2.4a. La abducción es el alejamiento de una parte
de cuerpo (en este caso de los dedos) respecto al eje central (figura 2.4b). La aducción es un
movimiento que acerca un órgano o una extremidad al plano medio del cuerpo.
El movimiento de flexión de los dedos de la mano humana por su parte, consiste en la
curvatura o reducción del ángulo que forman dos partes del cuerpo humano mientras que la
extensión es el endurecimiento o incremento del ángulo entre dos partes del cuerpo humano
(figura 2.4c).
Los dedos de la mano humana presentan características de movimiento que limitan los grados
de flexión existentes entre cada una de las uniones falángicas. Estas características
condicionan el comportamiento dinámico7 de los dedos. Si se analiza con detenimiento la
flexión del dedo índice, por citar alguno de ellos, es posible determinar visualmente la
existencia de una secuencia de movimiento entre cada una de las falanges con referencia en
los grados máximos de flexión permitidos. Es decir, la flexión de los dedos comienza en la
falange medial, a continuación interviene la falange distal y por último la proximal. Este
acoplamiento dinámico es utilizado como base para el desarrollo del trabajo de investigación
reportado en el presente documento. La figura 2.4d muestra los grados de flexión permitidos
para cada una de las falanges del dedo humano.
(a) (b) (c) (d)
Figura 2.4: (a) Estado neutro de la mano humana; (b) Movimiento de abducción de los dedos de la mano humana; (c) Movimientos de flexión-extensión de los dedos de la mano humana; (d) Grados de flexión en el dedo humano
2.3. Lesiones de la mano humana Como ya se mencionó con anterioridad, la mano es la estructura más completa del cuerpo
humano, ello revierte una importancia considerable dentro de todas las necesidades de la
vida, es capaz de hacer una actividad de extrema violencia, como de realizar otra de infinita
delicadeza. La lesión impide a la mano ejecutar las funciones fundamentales produciendo en
el mejor de los casos una alteración de sus patrones de uso y en el peor una mano
discapacitada.
7 Describe la evolución en el tiempo de un sis tema físico en relación a las causas que provocan los cambios de
estado físico y/o estado de movimiento.
Estado del Arte 11
2.3.1. Lesiones Vasculares
Las lesiones del sistema vascular8 pueden producirse por elementos cortantes, contusos,
quemantes, armas de fuego, explosivos, tracción. La hemorragia producida por la lesión de una
arteria o una vena se puede controlar, en la mayoría de los casos, con presión manual de la
herida, elevación de la extremidad superior, colocación de compresas y un vendaje de tela. En
caso de lesión simultánea de arteria y vena se debe reparar primero la vena9 y luego la
arteria10.
En el caso de lesiones vasculares que resulten en una ruptura tendinosa11 y consecuentemente
en una cirugía, la rehabilitación puede ser llevada a cabo con movimientos, con la finalidad de
que el tendón dañado recupere su movilidad.
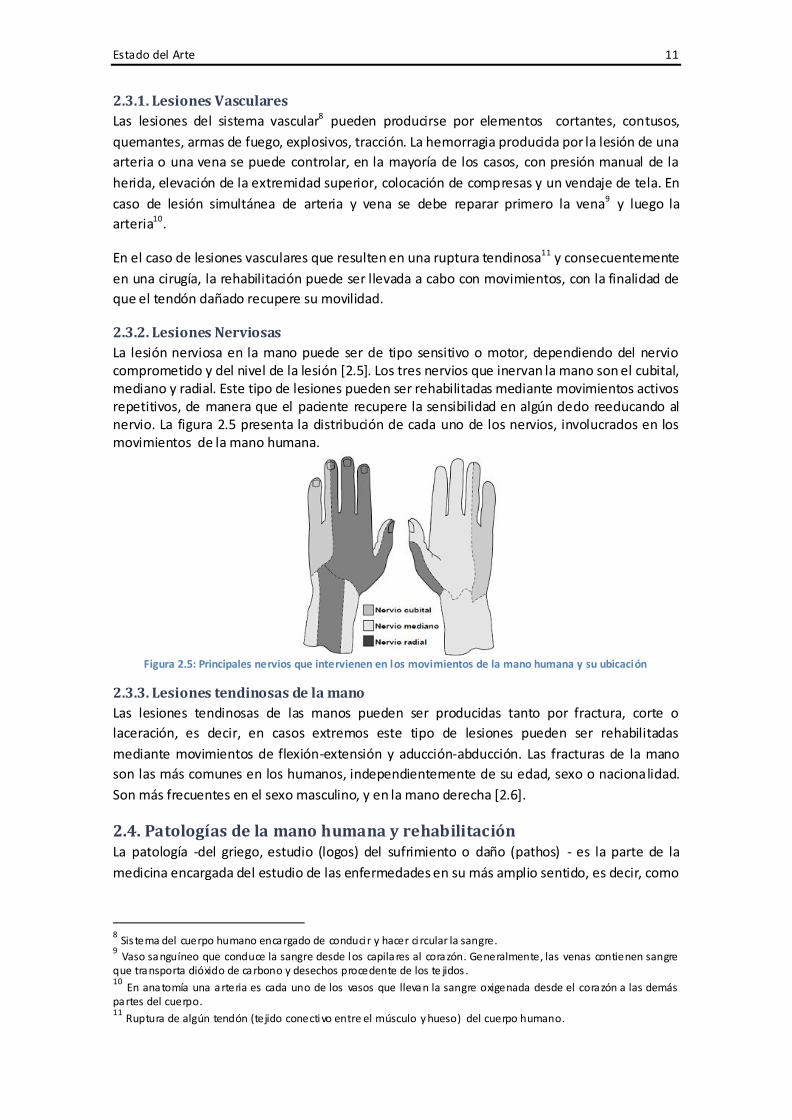
2.3.2. Lesiones Nerviosas
La lesión nerviosa en la mano puede ser de tipo sensitivo o motor, dependiendo del nervio comprometido y del nivel de la lesión [2.5]. Los tres nervios que inervan la mano son el cubital, mediano y radial. Este tipo de lesiones pueden ser rehabilitadas mediante movimientos activos repetitivos, de manera que el paciente recupere la sensibilidad en algún dedo reeducando al nervio. La figura 2.5 presenta la distribución de cada uno de los nervios, involucrados en los movimientos de la mano humana.
Figura 2.5: Principales nervios que intervienen en los movimientos de la mano humana y su ubicación
2.3.3. Lesiones tendinosas de la mano
Las lesiones tendinosas de las manos pueden ser producidas tanto por fractura, corte o
laceración, es decir, en casos extremos este tipo de lesiones pueden ser rehabilitadas
mediante movimientos de flexión-extensión y aducción-abducción. Las fracturas de la mano
son las más comunes en los humanos, independientemente de su edad, sexo o nacionalidad.
Son más frecuentes en el sexo masculino, y en la mano derecha [2.6].
2.4. Patologías de la mano humana y rehabilitación La patología -del griego, estudio (logos) del sufrimiento o daño (pathos) - es la parte de la
medicina encargada del estudio de las enfermedades en su más amplio sentido, es decir, como
8 Sis tema del cuerpo humano encargado de conducir y hacer ci rcular la sangre.
9 Vaso sanguíneo que conduce la sangre desde los capilares al corazón. Generalmente, las venas contienen sangre
que transporta dióxido de carbono y desechos procedente de los te jidos . 10
En anatomía una arteria es cada uno de los vasos que llevan la sangre oxigenada desde el corazón a las demás partes del cuerpo. 11
Ruptura de algún tendón (tejido conectivo entre el músculo y hueso) del cuerpo humano.
12 Diseño de un equipo para rehabilitación de dedos
procesos o estados anormales de causas conocidas o desconocidas. Dentro de las patologías
de la extremidad superior que requiere terapia de la mano se encuentran las siguientes:
Fracturas, lesiones de tendones, lesiones por aplastamiento y amputación.
Artritis12.
Post quirúrgicas, tendinosas y reconstrucción de defectos congénitos.
Síndromes de sobreuso y lesiones relacionadas con el trabajo (tendinitis13).
Deformidades congénitas y distrofia muscular.
En cuanto a los procesos de rehabilitación referidos para estas patologías cabe destacar que
pueden ser de tipo activa o pasiva. La rehabilitación activa es aquella en la que el paciente
realiza por sí mismo los movimientos terapéuticos, mientras que la tipo pasiva es aquella en la
que algún terapista o dispositivo externo genera dichos movimientos.
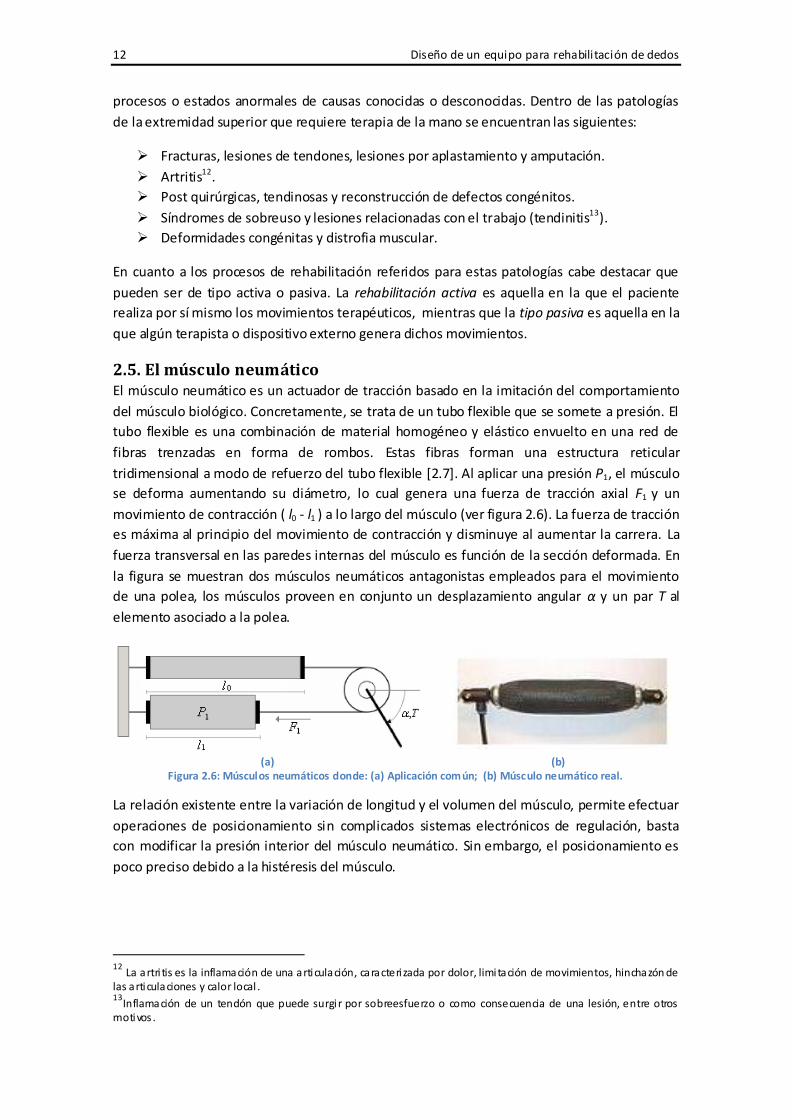
2.5. El músculo neumático El músculo neumático es un actuador de tracción basado en la imitación del comportamiento
del músculo biológico. Concretamente, se trata de un tubo flexible que se somete a presión. El
tubo flexible es una combinación de material homogéneo y elástico envuelto en una red de
fibras trenzadas en forma de rombos. Estas fibras forman una estructura reticular
tridimensional a modo de refuerzo del tubo flexible [2.7]. Al aplicar una presión P1, el músculo
se deforma aumentando su diámetro, lo cual genera una fuerza de tracción axial F1 y un
movimiento de contracción ( l0 - l1 ) a lo largo del músculo (ver figura 2.6). La fuerza de tracción
es máxima al principio del movimiento de contracción y disminuye al aumentar la carrera. La
fuerza transversal en las paredes internas del músculo es función de la sección deformada. En
la figura se muestran dos músculos neumáticos antagonistas empleados para el movimiento
de una polea, los músculos proveen en conjunto un desplazamiento angular α y un par T al
elemento asociado a la polea.
(a) (b) Figura 2.6: Músculos neumáticos donde: (a) Aplicación común; (b) Músculo neumático real.
La relación existente entre la variación de longitud y el volumen del músculo, permite efectuar
operaciones de posicionamiento sin complicados sistemas electrónicos de regulación, basta
con modificar la presión interior del músculo neumático. Sin embargo, el posicionamiento es
poco preciso debido a la histéresis del músculo.
12
La artri tis es la inflamación de una articulación, caracterizada por dolor, limitación de movimientos, hinchazón de las articulaciones y calor local . 13
Inflamación de un tendón que puede surgir por sobreesfuerzo o como consecuencia de una lesión, entre otros motivos .
Estado del Arte 13
2.6. Desarrollos tecnológicos orientados a fisioterapias En los últimos años, gracias al auge que ha tenido la automatización con la robótica, se han
llevado a cabo investigaciones y desarrollos aplicados a los procesos de rehabilitación del
cuerpo humano. Algunos de los dispositivos construidos enfocados a las terapias de manos y
dedos se listan a continuación.
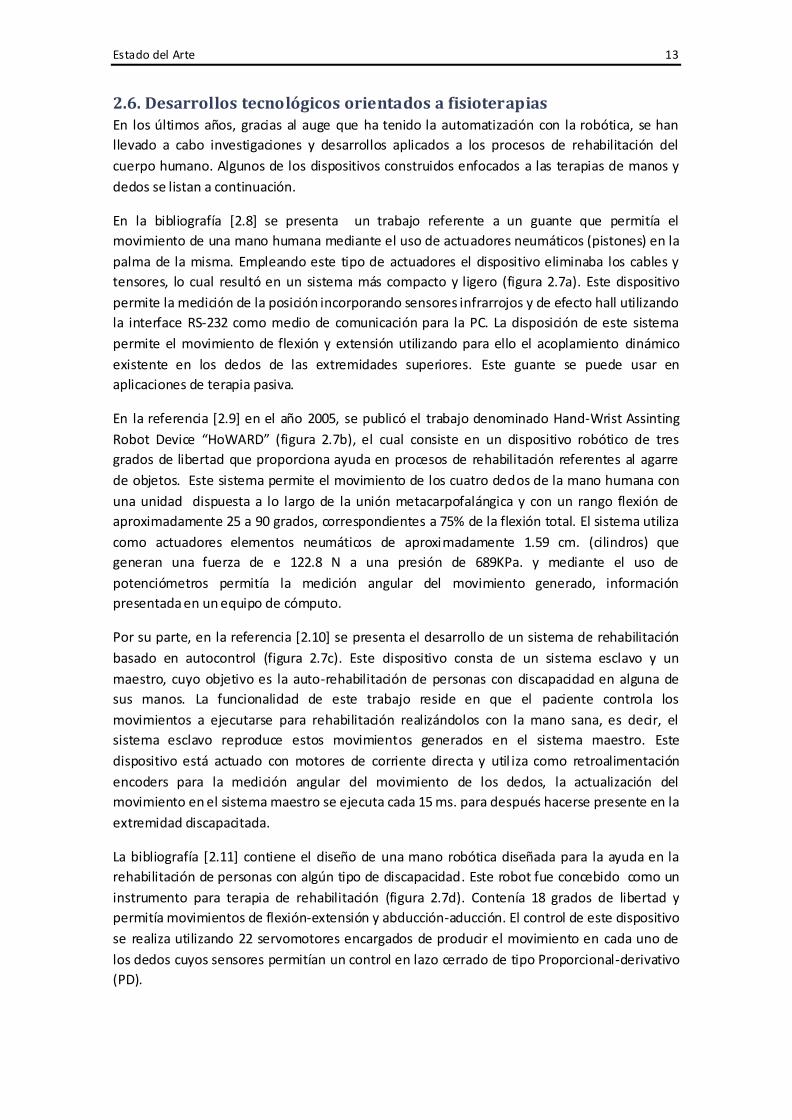
En la bibliografía [2.8] se presenta un trabajo referente a un guante que permitía el
movimiento de una mano humana mediante el uso de actuadores neumáticos (pistones) en la
palma de la misma. Empleando este tipo de actuadores el dispositivo eliminaba los cables y
tensores, lo cual resultó en un sistema más compacto y ligero (figura 2.7a). Este dispositivo
permite la medición de la posición incorporando sensores infrarrojos y de efecto hall utilizando
la interface RS-232 como medio de comunicación para la PC. La disposición de este sistema
permite el movimiento de flexión y extensión utilizando para ello el acoplamiento dinámico
existente en los dedos de las extremidades superiores. Este guante se puede usar en
aplicaciones de terapia pasiva.
En la referencia [2.9] en el año 2005, se publicó el trabajo denominado Hand-Wrist Assinting
Robot Device “HoWARD” (figura 2.7b), el cual consiste en un dispositivo robótico de tres
grados de libertad que proporciona ayuda en procesos de rehabilitación referentes al agarre
de objetos. Este sistema permite el movimiento de los cuatro dedos de la mano humana con
una unidad dispuesta a lo largo de la unión metacarpofalángica y con un rango flexión de
aproximadamente 25 a 90 grados, correspondientes a 75% de la flexión total. El sistema utiliza
como actuadores elementos neumáticos de aproximadamente 1.59 cm. (cilindros) que
generan una fuerza de e 122.8 N a una presión de 689KPa. y mediante el uso de
potenciómetros permitía la medición angular del movimiento generado, información
presentada en un equipo de cómputo.
Por su parte, en la referencia [2.10] se presenta el desarrollo de un sistema de rehabilitación
basado en autocontrol (figura 2.7c). Este dispositivo consta de un sistema esclavo y un
maestro, cuyo objetivo es la auto-rehabilitación de personas con discapacidad en alguna de
sus manos. La funcionalidad de este trabajo reside en que el paciente controla los
movimientos a ejecutarse para rehabilitación realizándolos con la mano sana, es decir, el
sistema esclavo reproduce estos movimientos generados en el sistema maestro. Este
dispositivo está actuado con motores de corriente directa y util iza como retroalimentación
encoders para la medición angular del movimiento de los dedos, la actualización del
movimiento en el sistema maestro se ejecuta cada 15 ms. para después hacerse presente en la
extremidad discapacitada.
La bibliografía [2.11] contiene el diseño de una mano robótica diseñada para la ayuda en la
rehabilitación de personas con algún tipo de discapacidad. Este robot fue concebido como un
instrumento para terapia de rehabilitación (figura 2.7d). Contenía 18 grados de libertad y
permitía movimientos de flexión-extensión y abducción-aducción. El control de este dispositivo
se realiza utilizando 22 servomotores encargados de producir el movimiento en cada uno de
los dedos cuyos sensores permitían un control en lazo cerrado de tipo Proporcional-derivativo
(PD).
14 Diseño de un equipo para rehabilitación de dedos
(a)
(b)
(c)
(d)
Figura 2.7: Sistemas de rehabilitación: (a) Guante para rehabilitación pasiva; (b) Robot HoWARD; (c) Sistema de
auto-rehabilitación; (d) Mano robótica
En noviembre del 2007, la bibliografía [2.12] presenta un dispositivo de rehabilitación basado
en movimientos repetitivos utilizando una computadora como referencia (figura 2.8a). El
objetivo de este sistema consistía en la reeducación del miembro afectado en su conjunto total
cerebro-visión; consiguiendo con ello un rehabilitación motora interactiva tras algún tipo de
lesión neuropatológica14. Las pruebas realizadas a este sistema de rehabilitación estuvieron
basadas en agarres de objetos y su contrario, presentándose en el monitor las acciones
correspondientes a los principales movimientos involucrados como “Abrir” y “Cerrar” durante
10 u 11 ocasiones por sesión terapéutica.
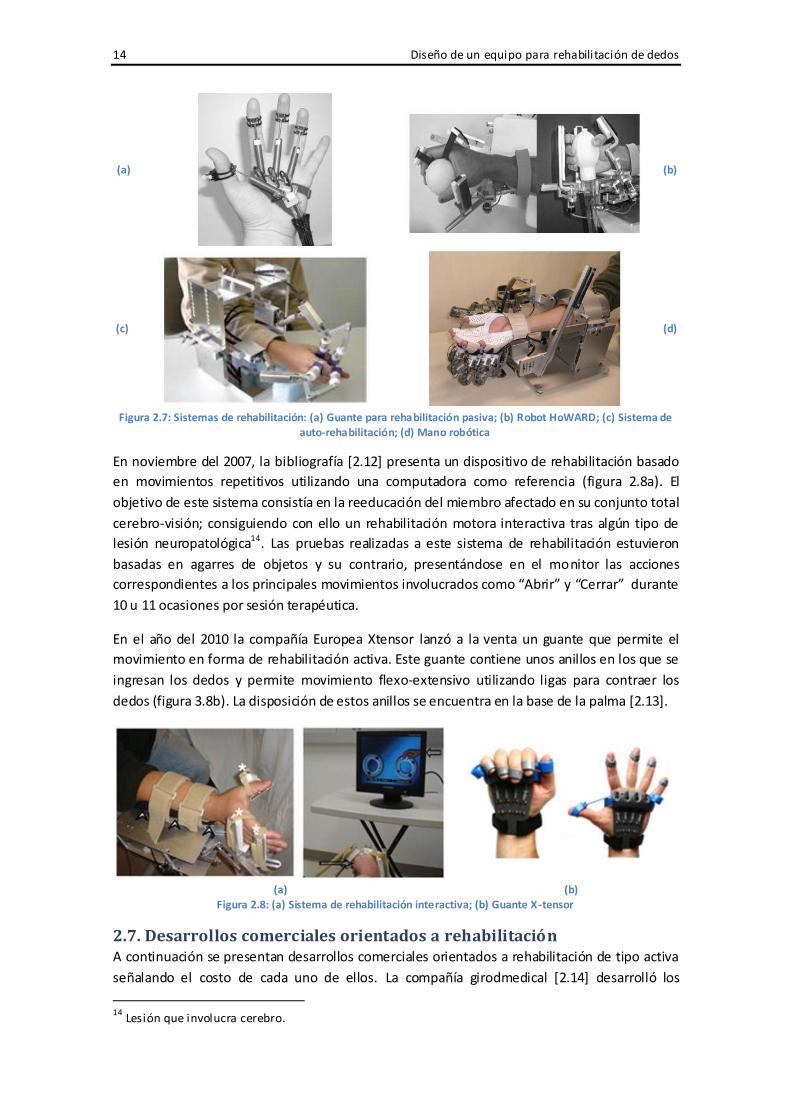
En el año del 2010 la compañía Europea Xtensor lanzó a la venta un guante que permite el
movimiento en forma de rehabilitación activa. Este guante contiene unos anillos en los que se
ingresan los dedos y permite movimiento flexo-extensivo utilizando ligas para contraer los
dedos (figura 3.8b). La disposición de estos anillos se encuentra en la base de la palma [2.13].
(a) (b) Figura 2.8: (a) Sistema de rehabilitación interactiva; (b) Guante X-tensor
2.7. Desarrollos comerciales orientados a rehabilitación A continuación se presentan desarrollos comerciales orientados a rehabilitación de tipo activa
señalando el costo de cada uno de ellos. La compañía girodmedical [2.14] desarrolló los
14
Lesión que involucra cerebro.
Estado del Arte 15
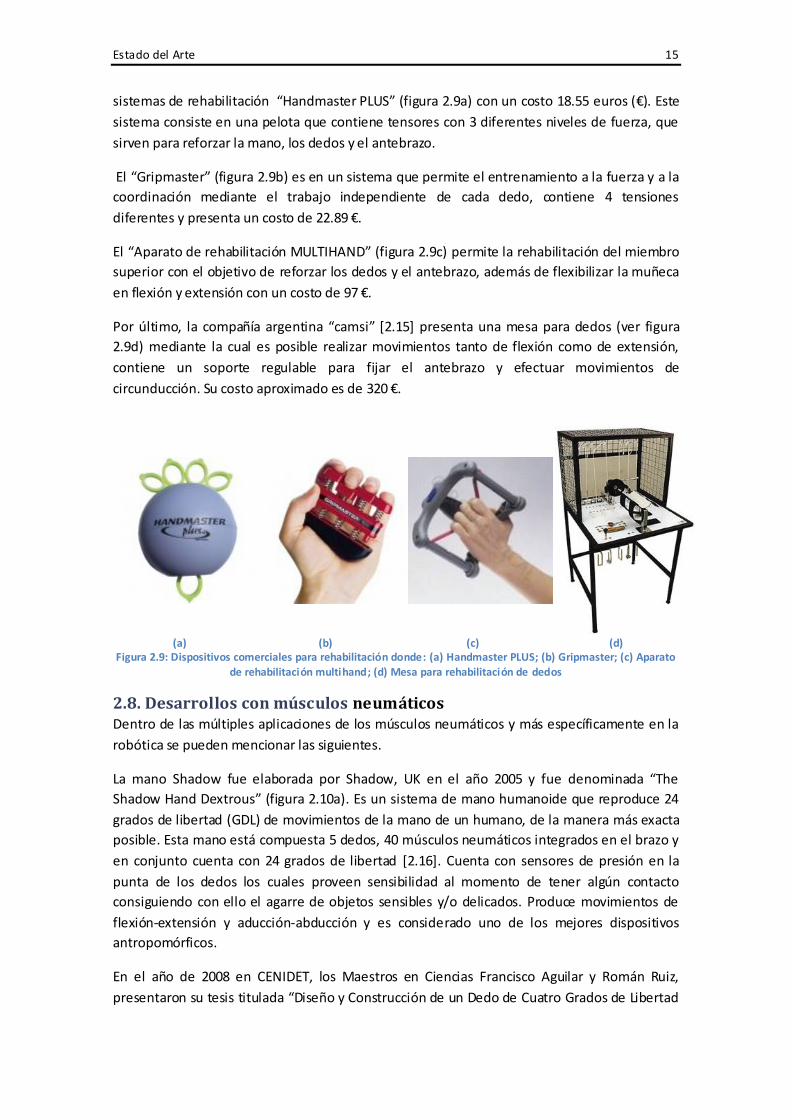
sistemas de rehabilitación “Handmaster PLUS” (figura 2.9a) con un costo 18.55 euros (€). Este
sistema consiste en una pelota que contiene tensores con 3 diferentes niveles de fuerza, que
sirven para reforzar la mano, los dedos y el antebrazo.
El “Gripmaster” (figura 2.9b) es en un sistema que permite el entrenamiento a la fuerza y a la
coordinación mediante el trabajo independiente de cada dedo, contiene 4 tensiones
diferentes y presenta un costo de 22.89 €.
El “Aparato de rehabilitación MULTIHAND” (figura 2.9c) permite la rehabilitación del miembro
superior con el objetivo de reforzar los dedos y el antebrazo, además de flexibilizar la muñeca
en flexión y extensión con un costo de 97 €.
Por último, la compañía argentina “camsi” [2.15] presenta una mesa para dedos (ver figura
2.9d) mediante la cual es posible realizar movimientos tanto de flexión como de extensión,
contiene un soporte regulable para fijar el antebrazo y efectuar movimientos de
circunducción. Su costo aproximado es de 320 €.
(a) (b) (c) (d)
Figura 2.9: Dispositivos comerciales para rehabilitación donde: (a) Handmaster PLUS; (b) Gripmaster; (c) Aparato de rehabilitación multihand; (d) Mesa para rehabilitación de dedos
2.8. Desarrollos con músculos neumáticos Dentro de las múltiples aplicaciones de los músculos neumáticos y más específicamente en la
robótica se pueden mencionar las siguientes.
La mano Shadow fue elaborada por Shadow, UK en el año 2005 y fue denominada “The
Shadow Hand Dextrous” (figura 2.10a). Es un sistema de mano humanoide que reproduce 24
grados de libertad (GDL) de movimientos de la mano de un humano, de la manera más exacta
posible. Esta mano está compuesta 5 dedos, 40 músculos neumáticos integrados en el brazo y
en conjunto cuenta con 24 grados de libertad [2.16]. Cuenta con sensores de presión en la
punta de los dedos los cuales proveen sensibilidad al momento de tener algún contacto
consiguiendo con ello el agarre de objetos sensibles y/o delicados. Produce movimientos de
flexión-extensión y aducción-abducción y es considerado uno de los mejores dispositivos
antropomórficos.
En el año de 2008 en CENIDET, los Maestros en Ciencias Francisco Aguilar y Román Ruiz,
presentaron su tesis titulada “Diseño y Construcción de un Dedo de Cuatro Grados de Libertad

16 Diseño de un equipo para rehabilitación de dedos
Conformado por Músculos Neumáticos Antagonistas” (figura 2.10b). En este proyecto de
investigación se presenta un prototipo capaz de reproducir movimientos de flexión-extensión y
aducción-abducción, de forma análoga a los movimientos que realiza un dedo de la mano
humana. El dedo mecánico es actuado por 8 músculos neumáticos en un arreglo antagonista
para cada uno de sus cuatro GDL y utiliza sensores de efecto hall para su control. Mediante
una interfaz electrónica y un software construido en la plataforma de desarrollo LabVIEW
permite la visualización de la medición angular de cada falange del sistema [1.1]
La siguiente referencia [2.17] presenta el diseño e implementación de una mano humanoide
accionada por músculos neumáticos desarrollada en la Universidad Tecnológica de Curtin, en
Australia (figura 2.10c). Esta mano dispone de 10 grados de libertad que van desde el codo
hasta los dedos controlados desde una GUI en una PC. La mano se acciona a través de 20
músculos neumáticos y es capaz de realizar con éxito una serie de tareas equivalentes a las
humanas, como agarrar y reubicar objetos. Las válvulas encargadas de entregar la presión de
aire hacia los músculos neumáticos son controladas electrónicamente utilizando la técnica
PWM a través de una tarjeta de adquisición de datos.
(a) (b)
(c)
Figura 2.10: Ejemplos de diseños de manos y dedos: (a) Mano Shadow; (b) Dedo neumático cenidet; (c) Mano humanoide
2.9. Prótesis robot Una prótesis es un elemento desarrollado con el fin de reemplazar una parte o un miembro del
cuerpo humano para mejorar o suplir su función y al mismo tiempo completar su imagen
corporal.
Estado del Arte 17
Para lograr este objetivo la mecánica juega un papel primordial en sus primeros diseños; por
esta razón se les dio el nombre de prótesis mecánicas o convencionales.
Más adelante con el avance tecnológico y más específicamente en el área de la robótica y la electrónica, se lograron desarrollar prótesis mejoradas en sus sistemas de control y adaptación hasta lograr una prótesis controlada con impulsos musculares, a la cual se le dio el nombre de prótesis Mioeléctrica (mio = músculo, eléctrica = electrónica).
Las prótesis mioeléctricas fueron desarrolladas basadas en la biónica, la cibernética, la robótica, la mecatrónica y es por esta razón que se les conoce con diferentes nombres para describirlas, como son prótesis cibernéticas, biónicas, mioeléctricas, mecatrónicas, electromecánicas, entre otras; pero todos estos términos solo describen una prótesis desarrollada con la combinación de la electrónica, la mecánica y controlada muscularmente.
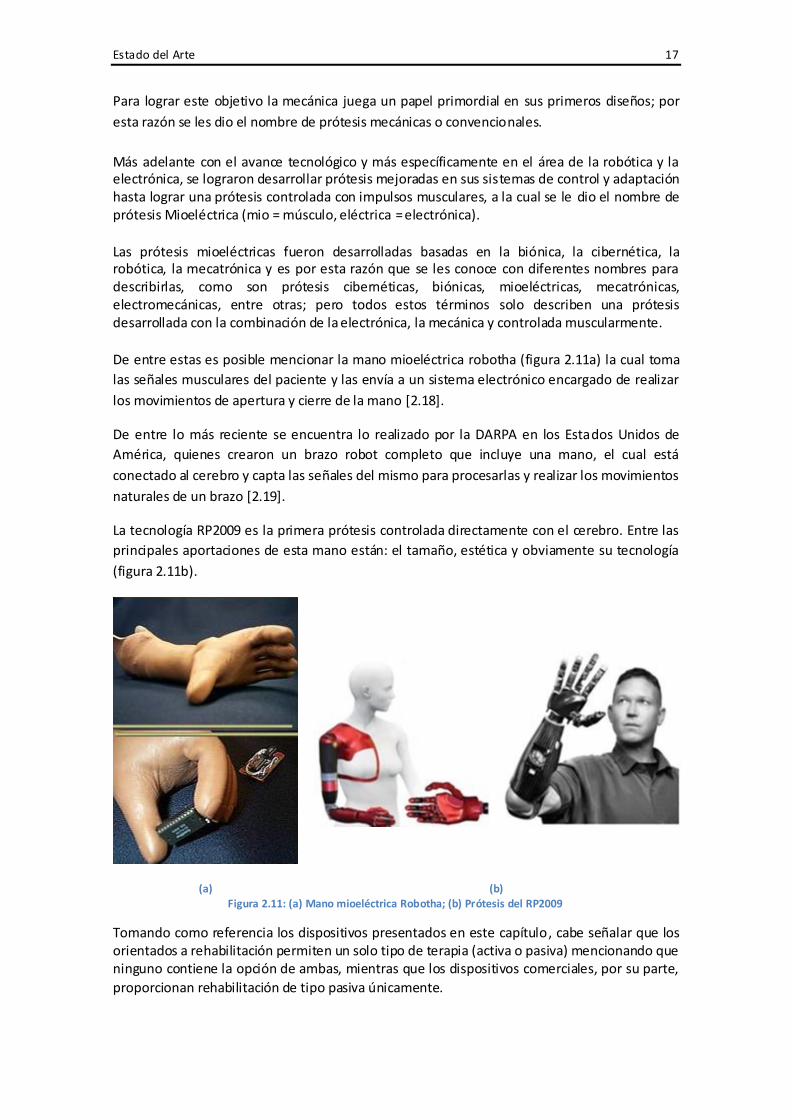
De entre estas es posible mencionar la mano mioeléctrica robotha (figura 2.11a) la cual toma
las señales musculares del paciente y las envía a un sistema electrónico encargado de realizar
los movimientos de apertura y cierre de la mano [2.18].
De entre lo más reciente se encuentra lo realizado por la DARPA en los Estados Unidos de
América, quienes crearon un brazo robot completo que incluye una mano, el cual está
conectado al cerebro y capta las señales del mismo para procesarlas y realizar los movimientos
naturales de un brazo [2.19].
La tecnología RP2009 es la primera prótesis controlada directamente con el cerebro. Entre las
principales aportaciones de esta mano están: el tamaño, estética y obviamente su tecnología
(figura 2.11b).
(a) (b) Figura 2.11: (a) Mano mioeléctrica Robotha; (b) Prótesis del RP2009
Tomando como referencia los dispositivos presentados en este capítulo, cabe señalar que los orientados a rehabilitación permiten un solo tipo de terapia (activa o pasiva) mencionando que ninguno contiene la opción de ambas, mientras que los dispositivos comerciales, por su parte,
proporcionan rehabilitación de tipo pasiva únicamente.

18 Diseño de un equipo para rehabilitación de dedos
Por las razones comentadas con anterioridad, nace la necesidad de construir un sistema de
rehabilitación que permita terapias ocupacionales de tipo activa y pasiva, siendo esta la
justificación para el diseño del sistema de rehabilitación presentado en este documento de
investigación.
Aunado a esto, las investigaciones realizadas previamente en cenidet referentes a sistemas
actuados por músculos neumáticos, han generado la información necesaria para construir un
sistema con aplicación práctica, sentando con ello las bases para trabajos futuros dentro de
este centro de investigación.
Estado del Arte 19
Bibliografía y Referencias [2.1] Pedreño J.L., Guerrero A., López J., “Estudio de los sensores táctiles artificiales
aplicados a la robótica de agarre”. Universidad Politécnica de Cartagena. Campus Muralla del Mar. Cartagena (Murcia). España.
[2.2] A. I. Kapandji, “Fisiología Articular”, Tomo I: Miembro Superior. 6ª Edición, Editorial Médica Panamericana.
[2.3] http://www.ugr.es/~dlcruz/index.htm, “Anatomía Funcional”. FACCAFD. Granada. España 2006. Fecha de Consulta: 04/Nov/09.
[2.4] Hernando L. Cimadevilla, Jesús G. Herrera. “Diseño de un sistema articulado emulando el movimiento de la mano humana”. Tesis de Maestría, CENIDET, México, 2006.
[2.5] Sloan E P. Nerve injuries in the hand. En: “The hand in emergency medicine”, Emergency Medicine Clinics of North America. 1993; Vol 11(3): 651-670.
[2.6] S. N. Oishi, Fractures and dislocations. Select Read Plast Surg 36(7): 1-29, 1995 [2.7] Hesse Stefan, “El músculo neumático y sus aplicaciones”, Blue Digest on Automation,
Festo AG & Co. KG, Esslingen, Alemania, 2003. [2.8] Bouzit Mourad, Burdea George, Popescu George and Boian Rares, “The Rutgers
Master II—New Design Force-Feedback Glove” [2.9] A Robotic Device for Hand Motor Therapy After Stroke. C.D. Takahashi, L. Der-
Yeghiaian, V.H. Le, S.C. Cramer. Proceedings of the 2005 IEEE, 9th International Conference on Rehabilitation Robotics.
[2.10] Haruhisa KAWASAKI, Hiroki KIMURA, Satoshi ITO, Yutaka NISHIMOTO, Hiroyuki HAYASHI, Hirohumi SAKAEDA, “HAND REHABILITATION SUPPORT SYSTEM BASED ON SELF-MOTION CONTROL, WITH A CLINICAL CASE REPORT”, World Automation Congress (WAC) 2006, July 24-26, Budapest, Hungary
[2.11] “Development of a Hand Motion Assist Robot for Rehabilitation Therapy by Patient Self-Motion Control”. H. Kawasaki, Member, IEEE, S. Ito, Y. Ishigure, Y. Nishimoto, T. Aoki, T. Mouri, H. Sakaeda, and M. AbeProceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, Noordwijk, The Netherlands.
[2.12] Robot-based hand motor therapy after stroke. Craig D.Takahashi, Lucy Der-Yeghiaian,Vu Le,Rehan R. Motiwala, StevenC.Cramer. Department of Neurology and Department of Anatomy & Neurobiology,University of California,Irvine,USA.
[2.13] http://www.thextensor.com/xtensor_wrist_pain.aspx . 2010 [2.14] http://www.girodmedical.es/. Empresa de material médico y paramédico, fecha de
consulta noviembre 2010. [2.15] http://www.camsi.com.ar/. Empresa de venta de sillas y camas ortopédicas, fecha de
consulta noviembre 2010. [2.16] Shadow Robot Company, UK, Marzo de 2009. www.shadowrobot.com [2.17] “Air Muscle Actuated Low Cost Humanoid Hand”, Peter Scarfe , Euan Lindsay. Curtin
University of Technology, Mechanical Engineering, Perth, Australia. International Journal of Advanced Robotic Systems, Vol. 3, No. 1 (2006).
[2.18] Robotha: Robótica humano–Asistencial http://robotha.com/mioelectrica.htm. Fecha de consulta 25/08/2010
[2.19] Sally Adee, Revista: IEEE Spectrum's SPECIAL REPORT: WINNERS & LOSERS 2009, The Year's Best and Worst of Technology, “The Revolution Will Be Prosthetized”, Enero de 2009.

20 Diseño de un equipo para rehabilitación de dedos
3
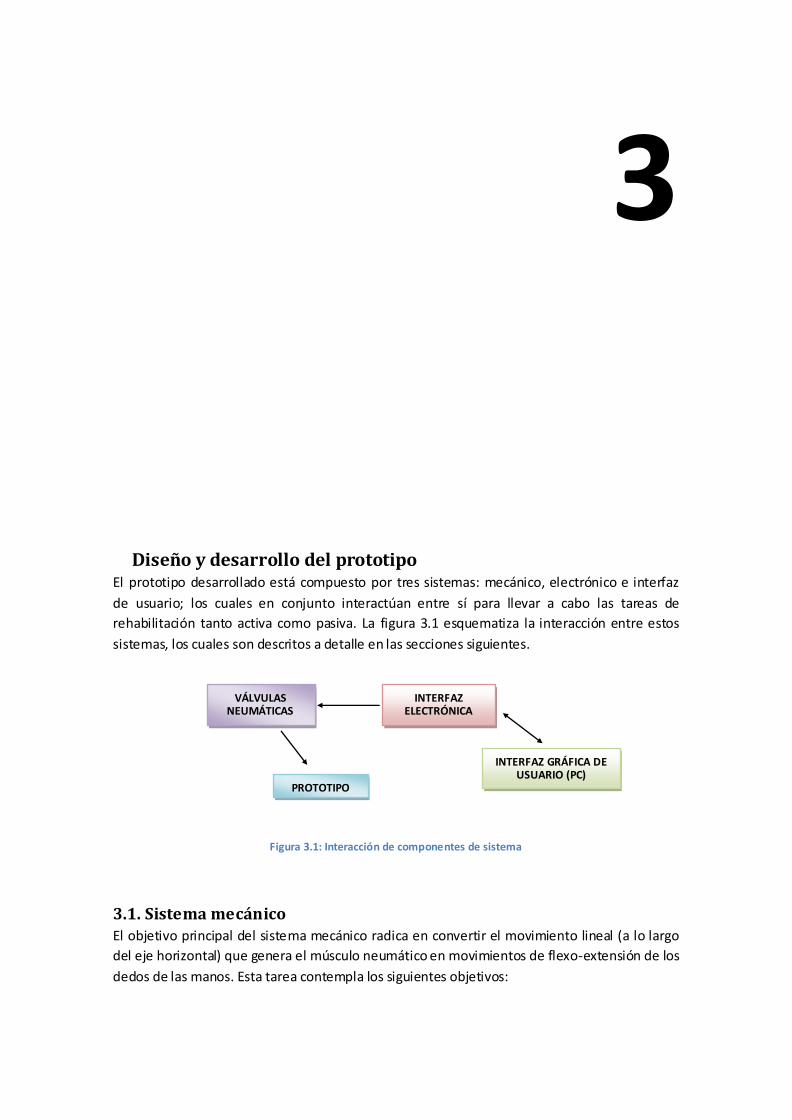
3. Diseño y desarrollo del prototipo El prototipo desarrollado está compuesto por tres sistemas: mecánico, electrónico e interfaz
de usuario; los cuales en conjunto interactúan entre sí para llevar a cabo las tareas de
rehabilitación tanto activa como pasiva. La figura 3.1 esquematiza la interacción entre estos
sistemas, los cuales son descritos a detalle en las secciones siguientes.
Figura 3.1: Interacción de componentes de sistema
3.1. Sistema mecánico El objetivo principal del sistema mecánico radica en convertir el movimiento lineal (a lo largo
del eje horizontal) que genera el músculo neumático en movimientos de flexo-extensión de los
dedos de las manos. Esta tarea contempla los siguientes objetivos:
PROTOTIPO
INTERFAZ ELECTRÓNICA
VÁLVULAS NEUMÁTICAS
INTERFAZ GRÁFICA DE USUARIO (PC)
22 Diseño de un equipo para rehabilitación de dedos
Implementación de un subsistema de acoplamiento mecánico del efector a distintos
tamaños de manos.
Empleo del prototipo tanto para mano derecha como izquierda, para la rehabilitación
de los dedos índice, medio, anular y meñique.
Diseño en CAD, empleando el paquete SolidWorks [3.1].
Construcción de prototipo en MDF15.
En los apartados siguientes se presenta el diseño, manufactura y ensamblaje del efector, así
como los sistemas de ajuste a los distintos tamaños y de transmisión de movimiento.
3.1.1. Diseño de componentes
La tarea principal del efector consiste en servir como un auxiliar en procesos de rehabilitación
de los dedos de las manos, empleando para esto elementos mecánicos, electrónicos e
informáticos. Basados en esta función global, se presenta en la figura 3.2a el diseño asistido
por computadora (CAD) del efector.
Dicho dispositivo puede ser dividido en tres partes principales, cada una con función particular
pero que en conjunto generan el movimiento en los dedos. Estas partes son:
Base móvil. Como su nombre lo indica, se trata de una base que puede ser desplazada
a lo largo de un eje (horizontal y paralelo al de movimiento del músculo neumático). El
propósito de esta sección del sistema, es el de poder dar un poco de tensión al
músculo neumático cada vez que se vaya a rehabilitar un paciente, esto a
consecuencia de los distintos tamaños de las manos. Cabe mencionar que mediante
esta base, se lleva a cabo también la conexión entre la alimentación de aire
proveniente de las válvulas y el músculo neumático. (Ver figura 3.2b).
Sus dimensiones son de 7.5” (19,05 cm.) largo, por 7.5” de ancho y una altura de 3”
(7.6 cm.) aproximadamente y está diseñado para sostener hasta 6 músculos
neumáticos.
Base Fija. Consta de un soporte para colocar el antebrazo el cual esta sostenido por
dos placas que a su vez sirven como guía para los músculos neumáticos y los tensores.
(Figura 3.2c)
Así mismo, las placas inferiores se atornillan a la base en “T” y a la placa superior
mediante unos perfiles en “L” los cuales dan más firmeza a la estructura.
Las dimensiones generales son: altura: 3” aproximadamente, largo: 15” (38.1 cm.) y
ancho: 6.5” (16.5 cm.). Por otra parte la base en forma de “T” es de 8.5” (21.6 cm.) de
ancho y 23.5” (59.6 cm.) de largo.
Caja de Rehabilitación. Se refiere a una estructura formada por perfiles en “L” de ¾”
montada sobre la base tipo “T”, la cual sostiene tres placas que contienen los
elementos mínimos necesarios para llevar a cabo los movimientos de flexo-extensión.
Cuenta con las siguientes dimensiones: altura 9” (22.8 cm.), largo 8.5” y ancho 13” (33
cm.).
En la figura 3.2d se muestra el CAD, donde se puede apreciar la placa superior sobre la
cual se visualizan 4 ranuras en las cuales se montan unos resortes. Cabe mencionar
15
Un tablero MDF es un aglomerado elaborado con fibras de madera aglutinadas con resinas sintéticas mediante fuerte presión y calor, en seco, hasta alcanzar una densidad media.
Diseño y desarrollo del equipo 23
que las ranuras tienen un poco más de una pulgada de longitud, esto con la finalidad
de permitir el desplazamiento los tornillos a lo largo de las mismas, lo que conlleva a
utilizar el dispositivo para distintos tamaños de manos.
En conjunto con el ajuste dado en la placa superior, si se visualizan las placas laterales,
se aprecian unas ranuras, mediante las cuales es posible colocar el soporte de la palma
en la mejor posición deseada. Con estos dos ajustes y el de la base móvil
prácticamente se logra dar terapia a la gran mayoría de pacientes, sin importar el
tamaño de sus manos o dedos.
Otro punto a mencionar de esta caja de rehabilitación es que sirve como base para la
colocación de un eje, sobre el cual están montados los rodamientos que guían al
tensor proveniente del músculo neumático.
(a) (b)
(c) (d)
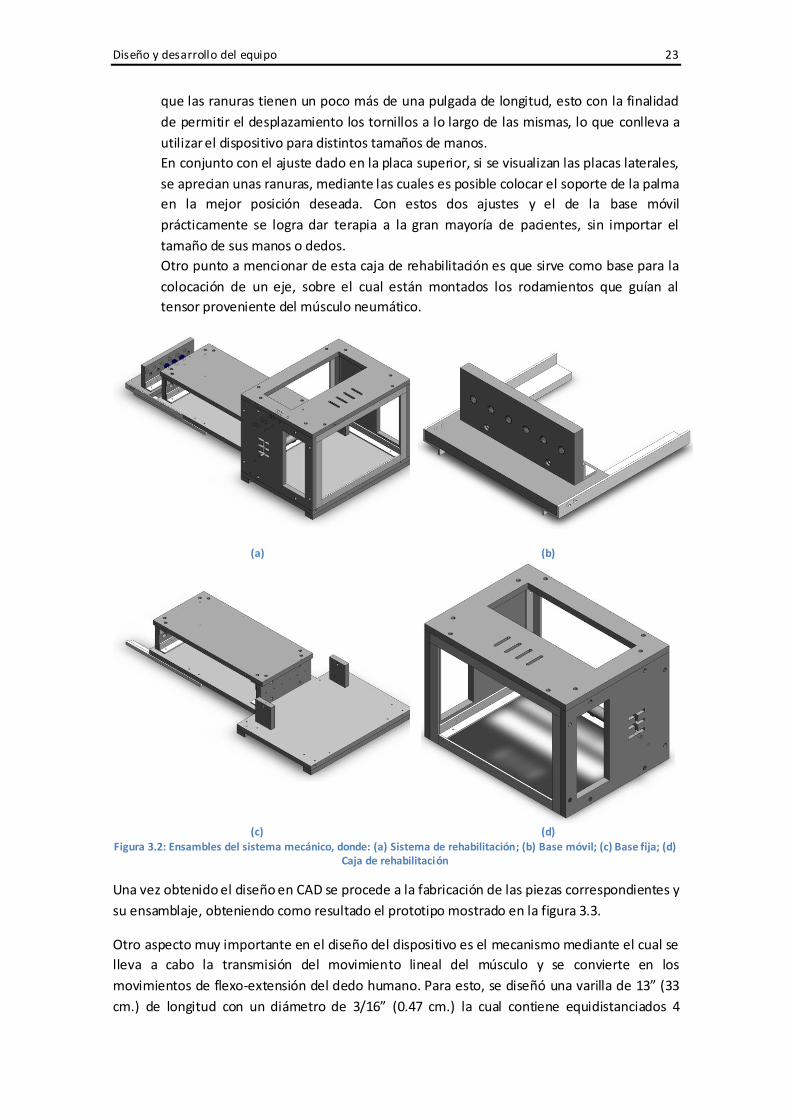
Figura 3.2: Ensambles del sistema mecánico, donde: (a) Sistema de rehabilitación; (b) Base móvil; (c) Base fija; (d) Caja de rehabilitación
Una vez obtenido el diseño en CAD se procede a la fabricación de las piezas correspondientes y
su ensamblaje, obteniendo como resultado el prototipo mostrado en la figura 3.3.
Otro aspecto muy importante en el diseño del dispositivo es el mecanismo mediante el cual se
lleva a cabo la transmisión del movimiento lineal del músculo y se convierte en los
movimientos de flexo-extensión del dedo humano. Para esto, se diseñó una varilla de 13” (33
cm.) de longitud con un diámetro de 3/16” (0.47 cm.) la cual contiene equidistanciados 4
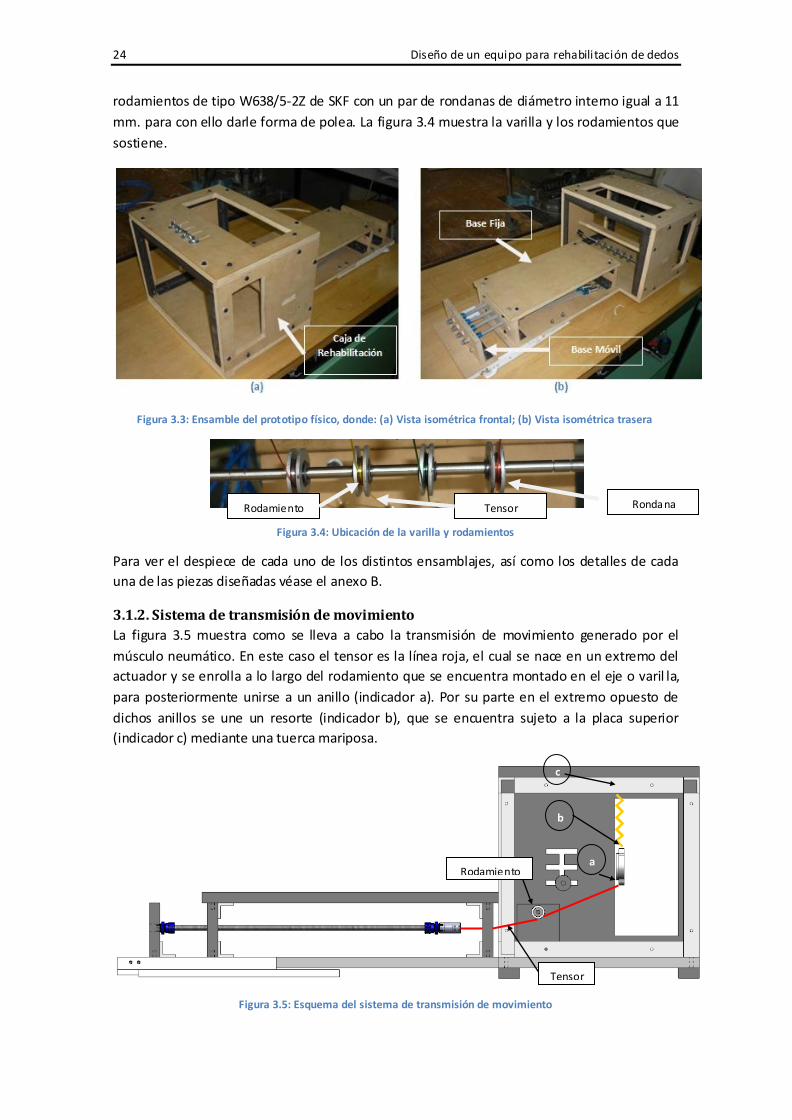
24 Diseño de un equipo para rehabilitación de dedos
rodamientos de tipo W638/5-2Z de SKF con un par de rondanas de diámetro interno igual a 11
mm. para con ello darle forma de polea. La figura 3.4 muestra la varilla y los rodamientos que
sostiene.
Figura 3.3: Ensamble del prototipo físico, donde: (a) Vista isométrica frontal; (b) Vista isométrica trasera
Figura 3.4: Ubicación de la varilla y rodamientos
Para ver el despiece de cada uno de los distintos ensamblajes, así como los detalles de cada
una de las piezas diseñadas véase el anexo B.
3.1.2. Sistema de transmisión de movimiento
La figura 3.5 muestra como se lleva a cabo la transmisión de movimiento generado por el
músculo neumático. En este caso el tensor es la línea roja, el cual se nace en un extremo del
actuador y se enrolla a lo largo del rodamiento que se encuentra montado en el eje o varil la,
para posteriormente unirse a un anillo (indicador a). Por su parte en el extremo opuesto de
dichos anillos se une un resorte (indicador b), que se encuentra sujeto a la placa superior
(indicador c) mediante una tuerca mariposa.
Figura 3.5: Esquema del sistema de transmisión de movimiento
Rodamiento Rondana Tensor
Tensor
b
a
c
Rodamiento
Diseño y desarrollo del equipo 25
Como se sabe, al momento de que al músculo se le inyecta una presión determinada de aire,
éste comienza a contraerse, generando con esto una fuerza axial, que comienza a atraer hacia
sí mismo el anillo y gracias a los acoplamientos de las articulaciones del dedo, al colocar el
anillo en la falange medial se produce la flexión del dedo. De modo contrario, al disminuir la
presión inyectada al músculo y mediante la fuerza ejercida por el resorte, el dedo vuelve a su
posición inicial.
3.1.3. Actuadores
El sistema de actuación del efector planteado, está basado en el uso de cuatro músculos
neumáticos de 12 pulgadas de longitud (aproximadamente 30 centímetros).
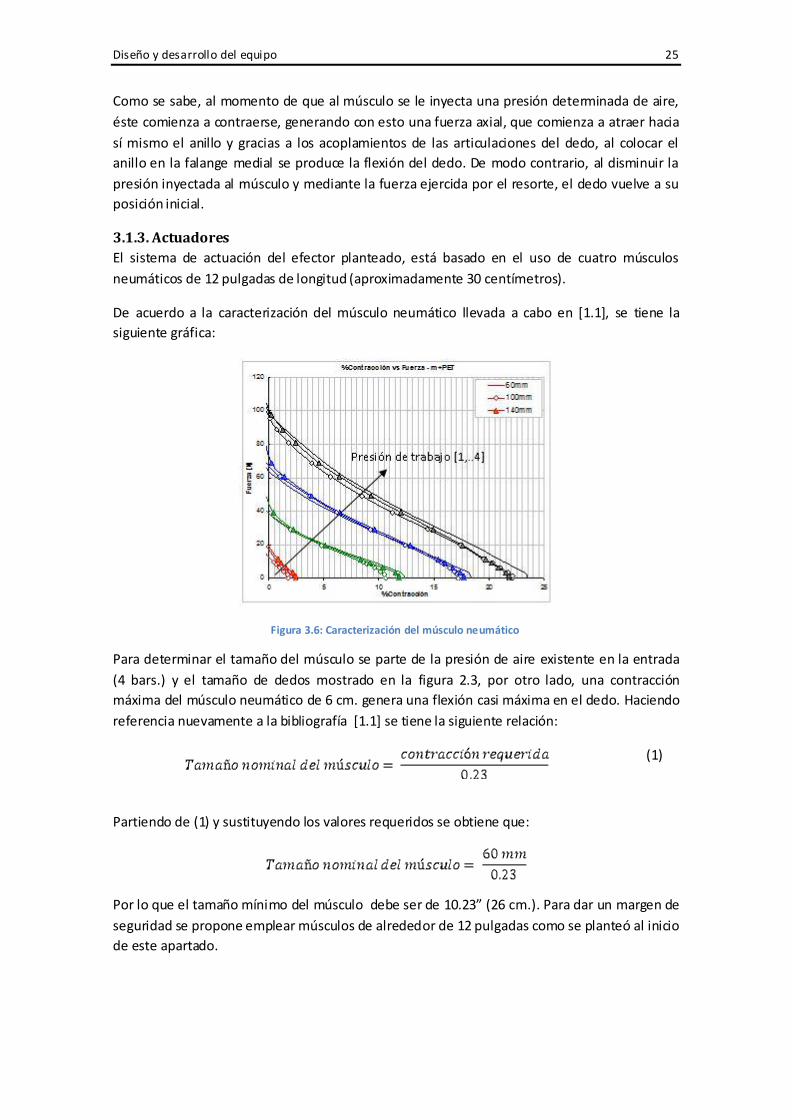
De acuerdo a la caracterización del músculo neumático llevada a cabo en [1.1], se tiene la
siguiente gráfica:
Figura 3.6: Caracterización del músculo neumático
Para determinar el tamaño del músculo se parte de la presión de aire existente en la entrada
(4 bars.) y el tamaño de dedos mostrado en la figura 2.3, por otro lado, una contracción
máxima del músculo neumático de 6 cm. genera una flexión casi máxima en el dedo. Haciendo
referencia nuevamente a la bibliografía [1.1] se tiene la siguiente relación:
(1)
Partiendo de (1) y sustituyendo los valores requeridos se obtiene que:
Por lo que el tamaño mínimo del músculo debe ser de 10.23” (26 cm.). Para dar un margen de
seguridad se propone emplear músculos de alrededor de 12 pulgadas como se planteó al inicio
de este apartado.
26 Diseño de un equipo para rehabilitación de dedos
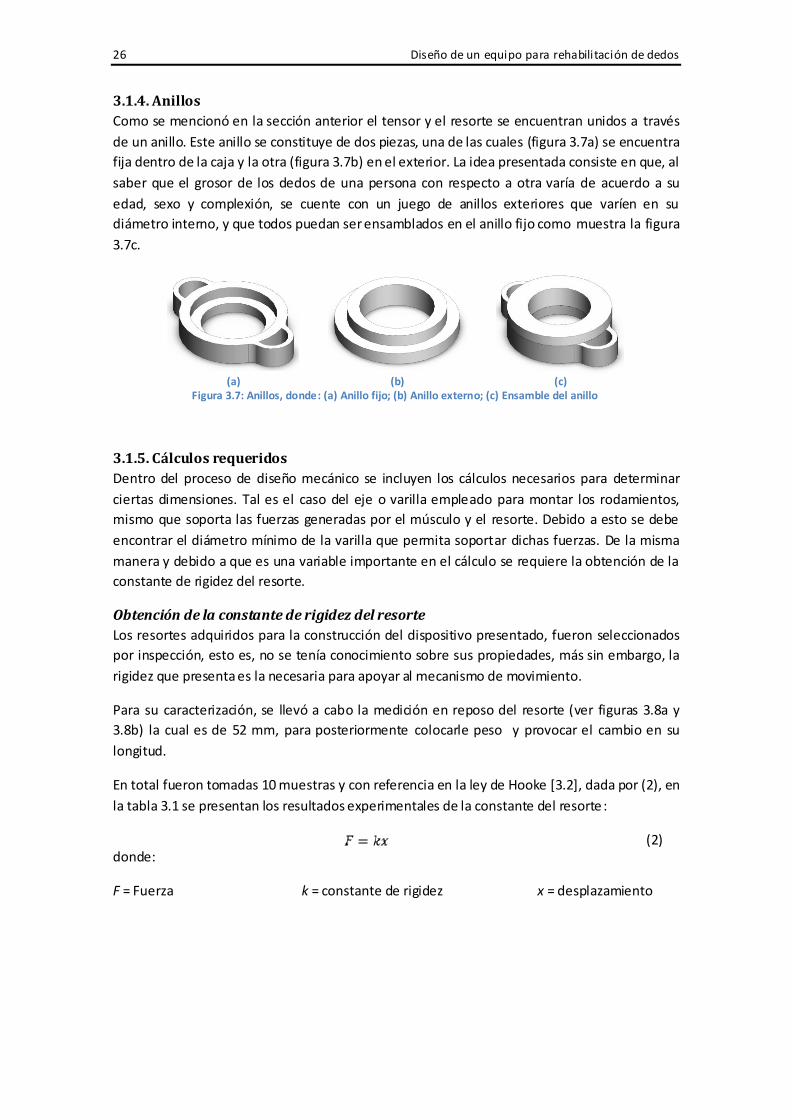
3.1.4. Anillos
Como se mencionó en la sección anterior el tensor y el resorte se encuentran unidos a través
de un anillo. Este anillo se constituye de dos piezas, una de las cuales (figura 3.7a) se encuentra
fija dentro de la caja y la otra (figura 3.7b) en el exterior. La idea presentada consiste en que, al
saber que el grosor de los dedos de una persona con respecto a otra varía de acuerdo a su
edad, sexo y complexión, se cuente con un juego de anillos exteriores que varíen en su
diámetro interno, y que todos puedan ser ensamblados en el anillo fijo como muestra la figura
3.7c.
(a) (b) (c)
Figura 3.7: Anillos, donde: (a) Anillo fijo; (b) Anillo externo; (c) Ensamble del anillo
3.1.5. Cálculos requeridos
Dentro del proceso de diseño mecánico se incluyen los cálculos necesarios para determinar
ciertas dimensiones. Tal es el caso del eje o varilla empleado para montar los rodamientos,
mismo que soporta las fuerzas generadas por el músculo y el resorte. Debido a esto se debe
encontrar el diámetro mínimo de la varilla que permita soportar dichas fuerzas. De la misma
manera y debido a que es una variable importante en el cálculo se requiere la obtención de la
constante de rigidez del resorte.
Obtención de la constante de rigidez del resorte
Los resortes adquiridos para la construcción del dispositivo presentado, fueron seleccionados
por inspección, esto es, no se tenía conocimiento sobre sus propiedades, más sin embargo, la
rigidez que presenta es la necesaria para apoyar al mecanismo de movimiento.
Para su caracterización, se llevó a cabo la medición en reposo del resorte (ver figuras 3.8a y
3.8b) la cual es de 52 mm, para posteriormente colocarle peso y provocar el cambio en su
longitud.
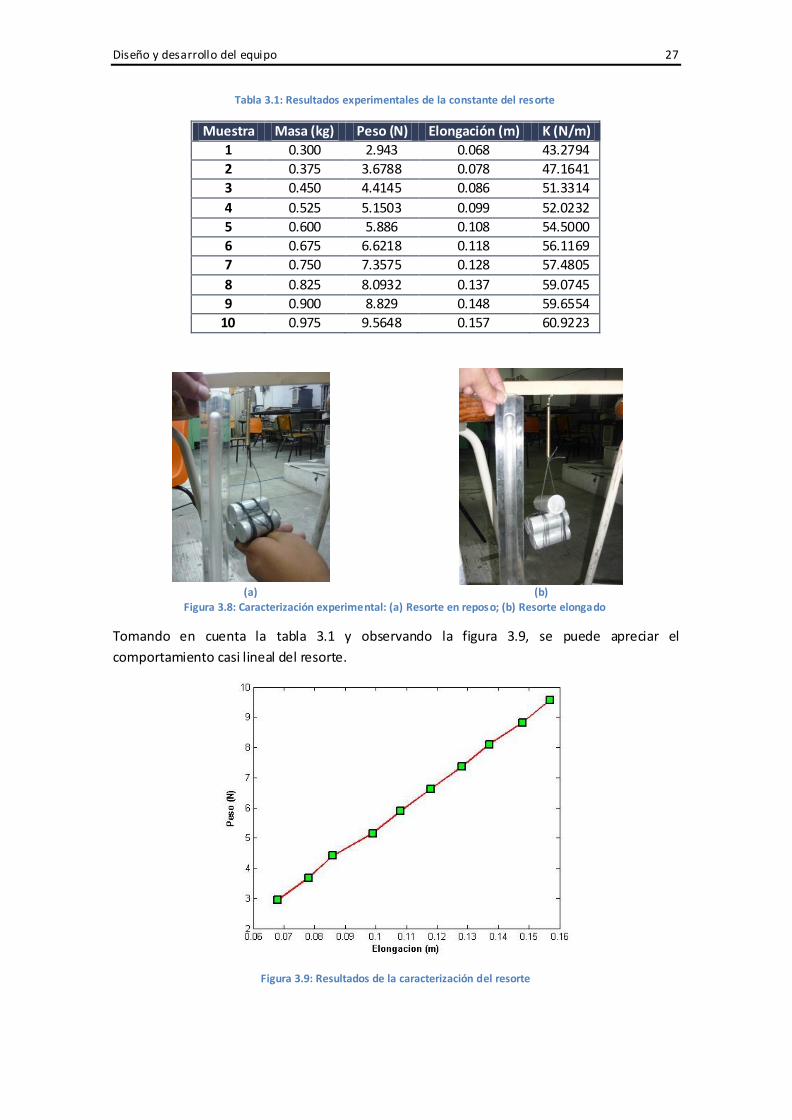
En total fueron tomadas 10 muestras y con referencia en la ley de Hooke [3.2], dada por (2), en
la tabla 3.1 se presentan los resultados experimentales de la constante del resorte :
(2) donde:
F = Fuerza k = constante de rigidez x = desplazamiento
Diseño y desarrollo del equipo 27
Tabla 3.1: Resultados experimentales de la constante del resorte
Muestra Masa (kg) Peso (N) Elongación (m) K (N/m)
1 0.300 2.943 0.068 43.2794
2 0.375 3.6788 0.078 47.1641
3 0.450 4.4145 0.086 51.3314
4 0.525 5.1503 0.099 52.0232
5 0.600 5.886 0.108 54.5000
6 0.675 6.6218 0.118 56.1169
7 0.750 7.3575 0.128 57.4805
8 0.825 8.0932 0.137 59.0745
9 0.900 8.829 0.148 59.6554
10 0.975 9.5648 0.157 60.9223
(a) (b)
Figura 3.8: Caracterización experimental: (a) Resorte en reposo; (b) Resorte elongado
Tomando en cuenta la tabla 3.1 y observando la figura 3.9, se puede apreciar el
comportamiento casi lineal del resorte.
Figura 3.9: Resultados de la caracterización del resorte
28 Diseño de un equipo para rehabilitación de dedos
Para concluir, se obtiene la constante del resorte promediando los resultados mostrados en la
tabla 3.1, dando como resultado .
Para comparar la constante obtenida es necesario determinar su valor mediante un método
teórico, basado en (3) de acuerdo a la bibliografía [3.2]:
(3)
Donde:
d = diámetro del alambre D = diámetro medio Na = número total de espiras G = módulo de rigidez o de cizalladura del acero
Tomando en cuenta que el diámetro del alambre es de 0.0005 m., que el resorte cuenta con
100 espiras y que es de acero, con un módulo de rigidez de 70 GPa, se tiene partiendo de (1)
que:
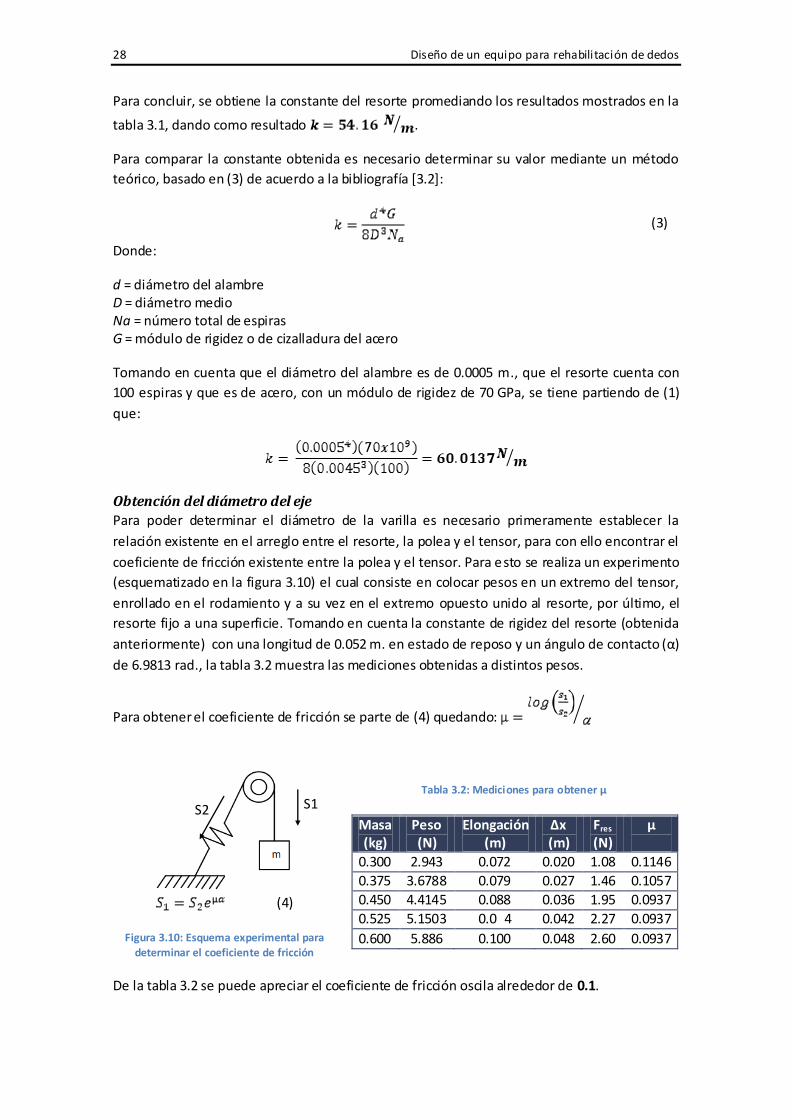
Obtención del diámetro del eje
Para poder determinar el diámetro de la varilla es necesario primeramente establecer la
relación existente en el arreglo entre el resorte, la polea y el tensor, para con ello encontrar el
coeficiente de fricción existente entre la polea y el tensor. Para esto se realiza un experimento
(esquematizado en la figura 3.10) el cual consiste en colocar pesos en un extremo del tensor,
enrollado en el rodamiento y a su vez en el extremo opuesto unido al resorte, por último, el
resorte fijo a una superficie. Tomando en cuenta la constante de rigidez del resorte (obtenida
anteriormente) con una longitud de 0.052 m. en estado de reposo y un ángulo de contacto (α)
de 6.9813 rad., la tabla 3.2 muestra las mediciones obtenidas a distintos pesos.
Para obtener el coeficiente de fricción se parte de (4) quedando:
(4)
Figura 3.10: Esquema experimental para
determinar el coeficiente de fricción
Tabla 3.2: Mediciones para obtener µ
Masa (kg)
Peso (N)
Elongación (m)
Δx (m)
Fres
(N) µ
0.300 2.943 0.072 0.020 1.08 0.1146
0.375 3.6788 0.079 0.027 1.46 0.1057
0.450 4.4145 0.088 0.036 1.95 0.0937
0.525 5.1503 0.0 4 0.042 2.27 0.0937
0.600 5.886 0.100 0.048 2.60 0.0937
De la tabla 3.2 se puede apreciar el coeficiente de fricción oscila alrededor de 0.1.
S2 S1
Diseño y desarrollo del equipo 29
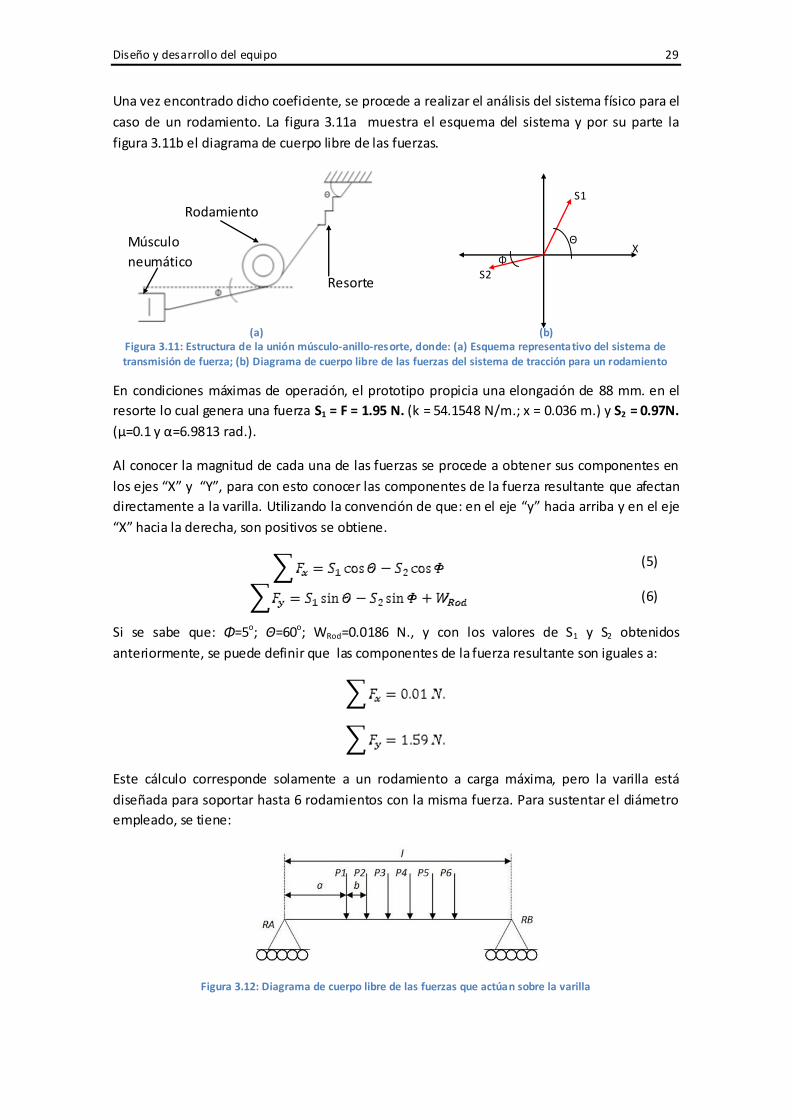
Una vez encontrado dicho coeficiente, se procede a realizar el análisis del sistema físico para el
caso de un rodamiento. La figura 3.11a muestra el esquema del sistema y por su parte la
figura 3.11b el diagrama de cuerpo libre de las fuerzas.
(a) (b) Figura 3.11: Estructura de la unión músculo-anillo-resorte, donde: (a) Esquema representativo del sistema de
transmisión de fuerza; (b) Diagrama de cuerpo libre de las fuerzas del sistema de tracción para un rodamiento
En condiciones máximas de operación, el prototipo propicia una elongación de 88 mm. en el
resorte lo cual genera una fuerza S1 = F = 1.95 N. (k = 54.1548 N/m.; x = 0.036 m.) y S2 = 0.97N.
(µ=0.1 y α=6.9813 rad.).
Al conocer la magnitud de cada una de las fuerzas se procede a obtener sus componentes en
los ejes “X” y “Y”, para con esto conocer las componentes de la fuerza resultante que afectan
directamente a la varilla. Utilizando la convención de que: en el eje “y” hacia arriba y en el eje
“X” hacia la derecha, son positivos se obtiene.
(5)
(6)
Si se sabe que: Φ=5o; Θ=60o; WRod=0.0186 N., y con los valores de S1 y S2 obtenidos
anteriormente, se puede definir que las componentes de la fuerza resultante son iguales a:
Este cálculo corresponde solamente a un rodamiento a carga máxima, pero la varilla está
diseñada para soportar hasta 6 rodamientos con la misma fuerza. Para sustentar el diámetro
empleado, se tiene:
Figura 3.12: Diagrama de cuerpo libre de las fuerzas que actúan sobre la varilla
Rodamiento
Músculo
neumático
Resorte
Φ
Θ
S2
S1
X

30 Diseño de un equipo para rehabilitación de dedos
Como se tienen fuerzas en los planos “X” y “Y” es necesario analizar cada uno de ellos. Para
facilitar este análisis se realiza el cálculo fuerza por fuerza como si fueran independientes, para
así encontrar el momento flexionante máximo. Además, a pesar de que la varilla tiene una
longitud de 13”, cabe resaltar que ésta cuenta con unos soportes más hacia el centro, dejando
como longitud efectiva 9”, longitud en la que se basarán los cálculos.
Los cálculos obedecen a lo siguiente:
(7)
(8)
(9)
Figura 3.13: Esquema de la carga de la varilla
Tomando en cuenta las ecuaciones de la figura anterior, los valores de Fx y Fy obtenidos y
recordando que l=0.2286 m,. se procede a calcular los momentos flexionantes mostrados en
las siguientes tablas:
Tabla 3.3: Resultados para Fx
a (m) b (m) RA (N) RB (N) M (N m)
0.0508 0.1778 0.0068 0.0019 0.0015
0.0762 0.1524 0.0058 0.0029 0.0023
0.1016 0.127 0.0048 0.0039 0.0030
0.127 0.1016 0.0039 0.0048 0.0030
0.1524 0.0762 0.0029 0.0058 0.0023
0.1778 0.0508 0.0019 0.0068 0.0015
Tabla 3.4: Resultados para Fy
a (m) b (m) RA (N) RB (N) M (N m)
0.0508 0.1778 1.2622 0.3606 0.2423
0.0762 0.1524 1.0819 0.5409 0.3635
0.1016 0.127 0.9016 0.7212 0.4846
0.127 0.1016 0.7212 0.9016 0.4846
0.1524 0.0762 0.5409 1.0819 0.3635
0.1778 0.0508 0.3606 1.2622 0.2423
Lo siguiente consiste en calcular los momentos flexionantes resultantes en cada uno de los
puntos, lo cual se lleva a cabo mediante la suma por superposición de cada uno de los valores
listado anterior. De este proceso se obtienen los resultados listados en la tabla 3.3, así como la
gráfica presentada en la figura 3.14 la cual tiene como ejes la distancia y el momento
generado en ese punto.
Al conocer el momento máximo mostrado en la tabla 3.5 y que la varilla está elaborada en
acero inoxidable T304, se procede a determinar su diámetro mediante la resistencia del

Diseño y desarrollo del equipo 31
material. Para realizar esto es necesario encontrar los esfuerzos máximos tanto permitido
como soportado, como se muestra en (10) de acuerdo a [3.2]:
(10)
donde:
Mmax=0.4846 N m e=D/2=0.0024 m
Sustituyendo en (9) se obtiene que:
Tabla 3.5: Momentos resultantes por cada plano y resultante final
Dist. (m)
MRx (N m)
MRy (N m)
MR (N m)
0.0508 0.0015 0.2423 0.2423
0.0762 0.0023 0.3635 0.3635
0.1016 0.0030 0.4846 0.4846
0.127 0.0030 0.4846 0.4846
0.1524 0.0023 0.3635 0.3635
0.1778 0.0015 0.2423 0.2423
Figura 3.14: Gráfica de momentos resultantes
Sin embargo, el esfuerzo permisible para esta varilla está dado según (11):
(11)
donde:
Cs = coeficiente de seguridad, el cual para este caso es de 1.2 = esfuerzo máximo permisible para el acero inoxidable T-304, proveniente de la
tabla A-22 de [3.2], el cual es de 276MPa
Arrojando como esfuerzo permisible:
Como σ ≤ σper se concluye que el diámetro de la varilla utilizado es aceptable.
3.2. Sistema electrónico La interfaz electrónica consiste en un conjunto de componentes encargados de la operatividad
del prototipo. Su función principal radica en permitir la comunicación con el equipo de
cómputo para configurar el sistema. Específicamente, permite el ajuste de las terapias para
cada uno de los pacientes mediante el intercambio de información con el software del sistema.
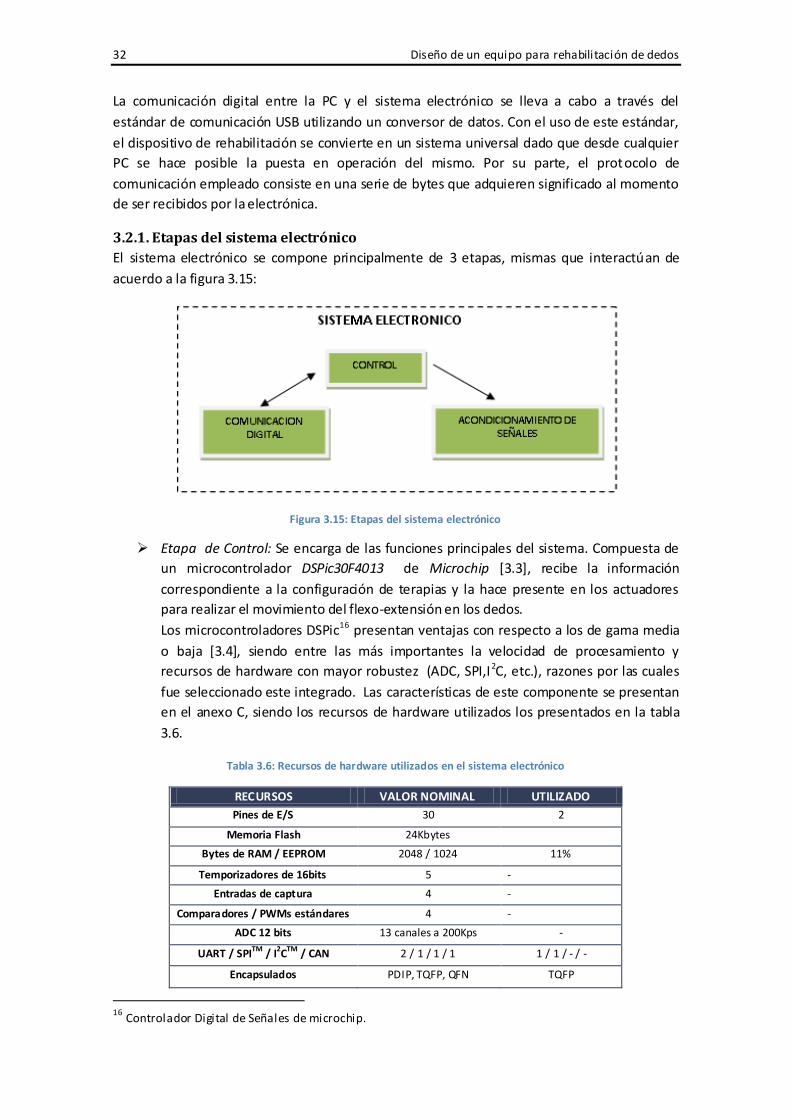
32 Diseño de un equipo para rehabilitación de dedos
La comunicación digital entre la PC y el sistema electrónico se lleva a cabo a través del
estándar de comunicación USB utilizando un conversor de datos. Con el uso de este estándar,
el dispositivo de rehabilitación se convierte en un sistema universal dado que desde cualquier
PC se hace posible la puesta en operación del mismo. Por su parte, el protocolo de
comunicación empleado consiste en una serie de bytes que adquieren significado al momento
de ser recibidos por la electrónica.
3.2.1. Etapas del sistema electrónico
El sistema electrónico se compone principalmente de 3 etapas, mismas que interactúan de
acuerdo a la figura 3.15:
Figura 3.15: Etapas del sistema electrónico
Etapa de Control: Se encarga de las funciones principales del sistema. Compuesta de
un microcontrolador DSPic30F4013 de Microchip [3.3], recibe la información
correspondiente a la configuración de terapias y la hace presente en los actuadores
para realizar el movimiento del flexo-extensión en los dedos.
Los microcontroladores DSPic16 presentan ventajas con respecto a los de gama media
o baja [3.4], siendo entre las más importantes la velocidad de procesamiento y
recursos de hardware con mayor robustez (ADC, SPI,I2C, etc.), razones por las cuales
fue seleccionado este integrado. Las características de este componente se presentan
en el anexo C, siendo los recursos de hardware utilizados los presentados en la tabla
3.6.
Tabla 3.6: Recursos de hardware utilizados en el sistema electrónico
RECURSOS VALOR NOMINAL UTILIZADO
Pines de E/S 30 2
Memoria Flash 24Kbytes
Bytes de RAM / EEPROM 2048 / 1024 11%
Temporizadores de 16bits 5 -
Entradas de captura 4 -
Comparadores / PWMs estándares 4 -
ADC 12 bits 13 canales a 200Kps -
UART / SPITM / I2CTM / CAN 2 / 1 / 1 / 1 1 / 1 / - / -
Encapsulados PDIP, TQFP, QFN TQFP
16
Controlador Digital de Señales de microchip.
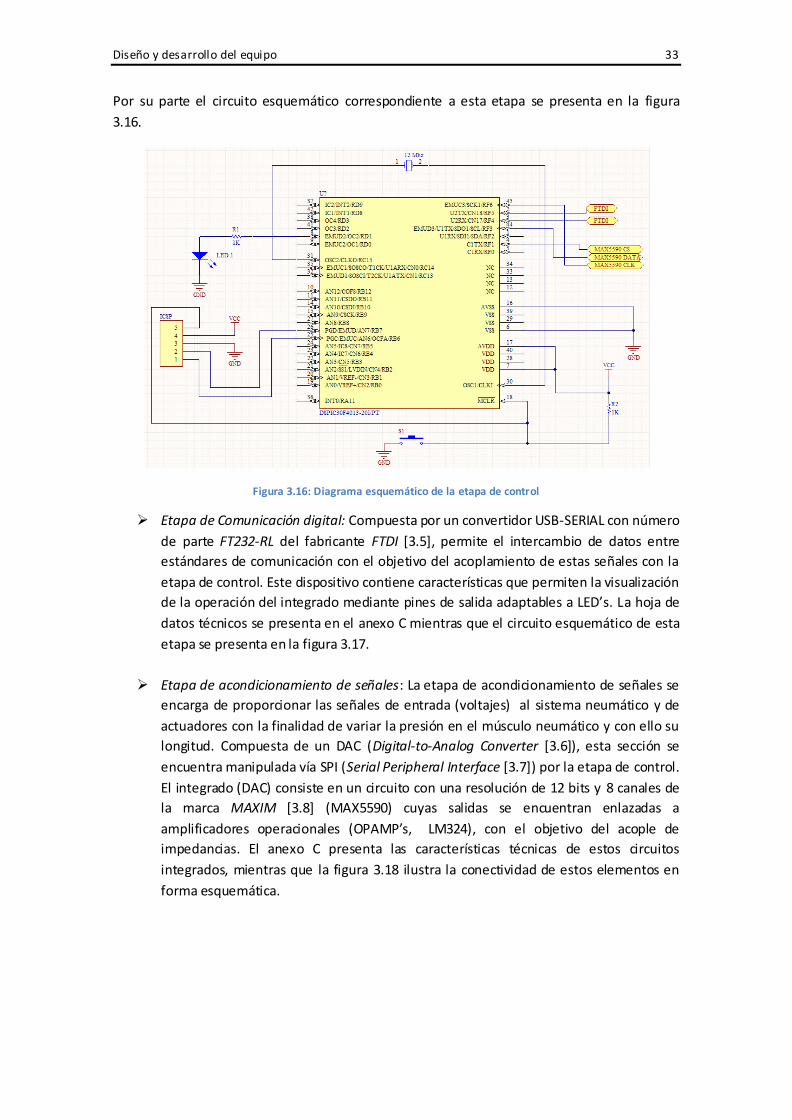
Diseño y desarrollo del equipo 33
Por su parte el circuito esquemático correspondiente a esta etapa se presenta en la figura
3.16.
Figura 3.16: Diagrama esquemático de la etapa de control
Etapa de Comunicación digital: Compuesta por un convertidor USB-SERIAL con número
de parte FT232-RL del fabricante FTDI [3.5], permite el intercambio de datos entre
estándares de comunicación con el objetivo del acoplamiento de estas señales con la
etapa de control. Este dispositivo contiene características que permiten la visualización
de la operación del integrado mediante pines de salida adaptables a LED’s. La hoja de
datos técnicos se presenta en el anexo C mientras que el circuito esquemático de esta
etapa se presenta en la figura 3.17.
Etapa de acondicionamiento de señales: La etapa de acondicionamiento de señales se
encarga de proporcionar las señales de entrada (voltajes) al sistema neumático y de
actuadores con la finalidad de variar la presión en el músculo neumático y con ello su
longitud. Compuesta de un DAC (Digital-to-Analog Converter [3.6]), esta sección se
encuentra manipulada vía SPI (Serial Peripheral Interface [3.7]) por la etapa de control.
El integrado (DAC) consiste en un circuito con una resolución de 12 bits y 8 canales de
la marca MAXIM [3.8] (MAX5590) cuyas salidas se encuentran enlazadas a
amplificadores operacionales (OPAMP’s, LM324), con el objetivo del acople de
impedancias. El anexo C presenta las características técnicas de estos circuitos
integrados, mientras que la figura 3.18 ilustra la conectividad de estos elementos en
forma esquemática.
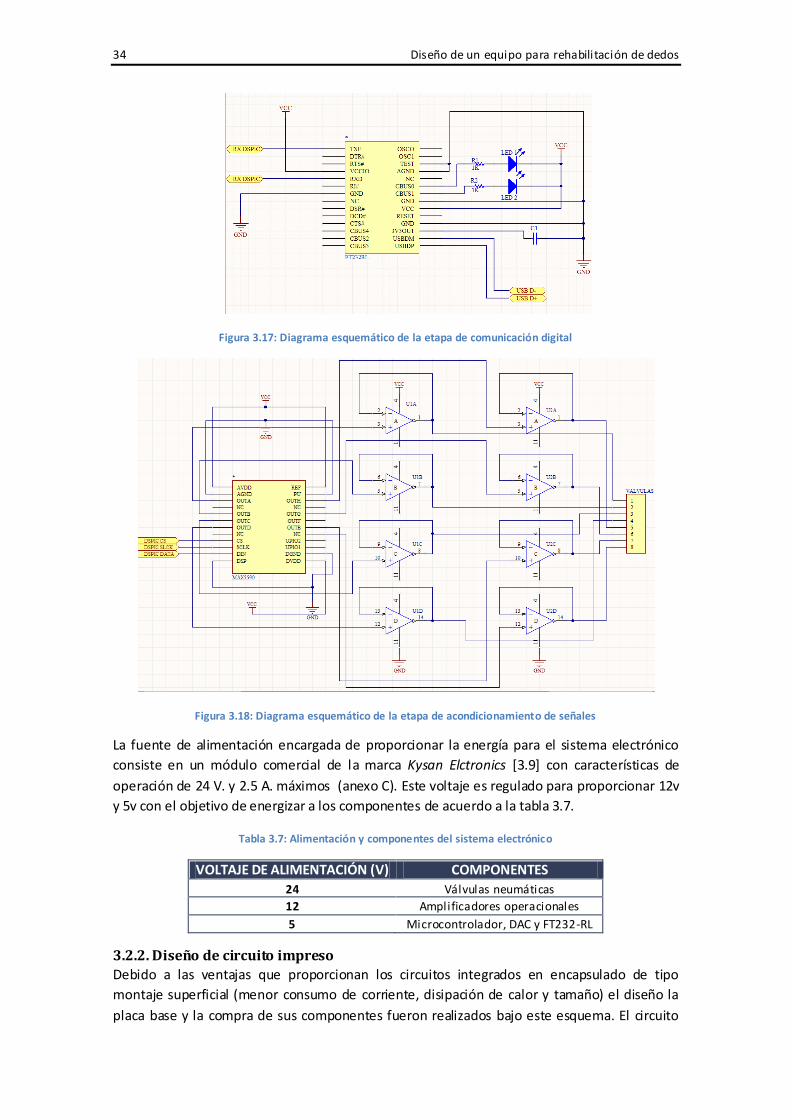
34 Diseño de un equipo para rehabilitación de dedos
Figura 3.17: Diagrama esquemático de la etapa de comunicación digital
Figura 3.18: Diagrama esquemático de la etapa de acondicionamiento de señales
La fuente de alimentación encargada de proporcionar la energía para el sistema electrónico
consiste en un módulo comercial de la marca Kysan Elctronics [3.9] con características de
operación de 24 V. y 2.5 A. máximos (anexo C). Este voltaje es regulado para proporcionar 12v
y 5v con el objetivo de energizar a los componentes de acuerdo a la tabla 3.7.
Tabla 3.7: Alimentación y componentes del sistema electrónico
VOLTAJE DE ALIMENTACIÓN (V) COMPONENTES
24 Válvulas neumáticas
12 Amplificadores operacionales
5 Microcontrolador, DAC y FT232-RL
3.2.2. Diseño de circuito impreso
Debido a las ventajas que proporcionan los circuitos integrados en encapsulado de tipo
montaje superficial (menor consumo de corriente, disipación de calor y tamaño) el diseño la
placa base y la compra de sus componentes fueron realizados bajo este esquema. El circuito
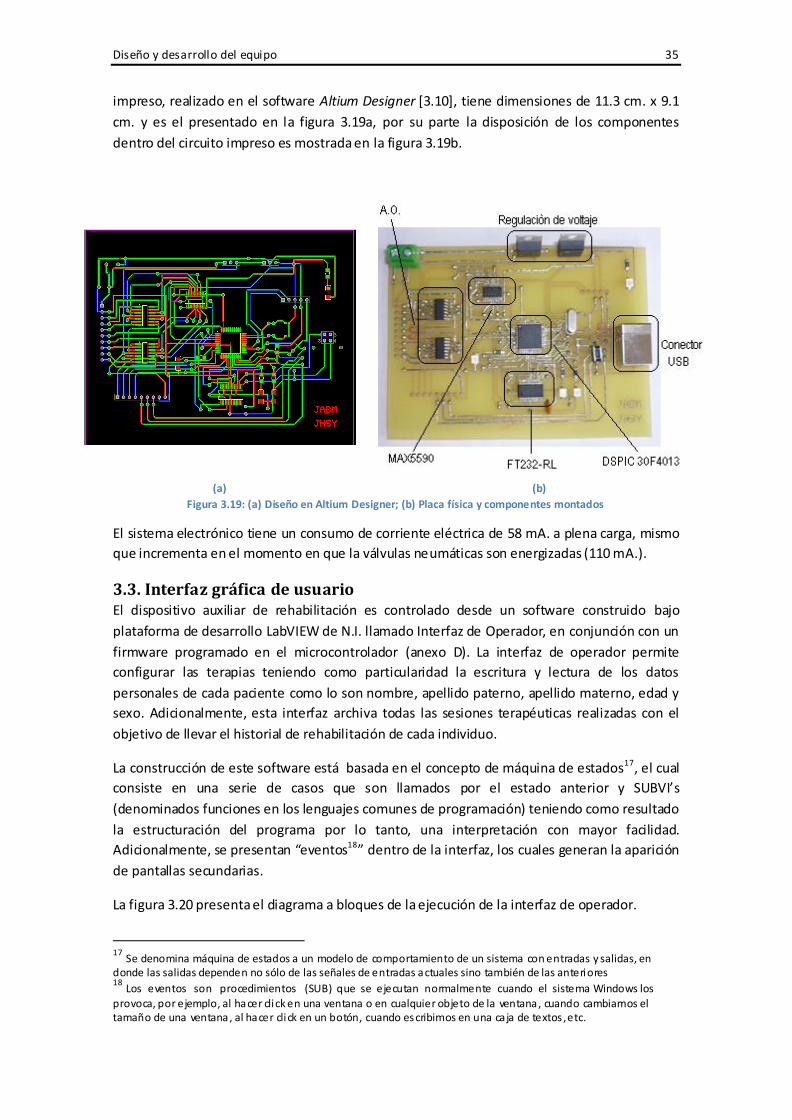
Diseño y desarrollo del equipo 35
impreso, realizado en el software Altium Designer [3.10], tiene dimensiones de 11.3 cm. x 9.1
cm. y es el presentado en la figura 3.19a, por su parte la disposición de los componentes
dentro del circuito impreso es mostrada en la figura 3.19b.
Figura 3.19: (a) Diseño en Altium Designer; (b) Placa física y componentes montados
El sistema electrónico tiene un consumo de corriente eléctrica de 58 mA. a plena carga, mismo
que incrementa en el momento en que la válvulas neumáticas son energizadas (110 mA.).
3.3. Interfaz gráfica de usuario El dispositivo auxiliar de rehabilitación es controlado desde un software construido bajo
plataforma de desarrollo LabVIEW de N.I. llamado Interfaz de Operador, en conjunción con un
firmware programado en el microcontrolador (anexo D). La interfaz de operador permite
configurar las terapias teniendo como particularidad la escritura y lectura de los datos
personales de cada paciente como lo son nombre, apellido paterno, apellido materno, edad y
sexo. Adicionalmente, esta interfaz archiva todas las sesiones terapéuticas realizadas con el
objetivo de llevar el historial de rehabilitación de cada individuo.
La construcción de este software está basada en el concepto de máquina de estados17, el cual
consiste en una serie de casos que son llamados por el estado anterior y SUBVI’s
(denominados funciones en los lenguajes comunes de programación) teniendo como resultado
la estructuración del programa por lo tanto, una interpretación con mayor facilidad.
Adicionalmente, se presentan “eventos18” dentro de la interfaz, los cuales generan la aparición
de pantallas secundarias.
La figura 3.20 presenta el diagrama a bloques de la ejecución de la interfaz de operador.
17
Se denomina máquina de estados a un modelo de comportamiento de un sistema con entradas y salidas, en donde las salidas dependen no sólo de las señales de entradas actuales sino también de las anteriores 18
Los eventos son procedimientos (SUB) que se ejecutan normalmente cuando el sistema Windows los provoca, por ejemplo, al hacer click en una ventana o en cualquier objeto de la ventana, cuando cambiamos el tamaño de una ventana, al hacer click en un botón, cuando escribimos en una ca ja de textos , etc.
(a) (b)
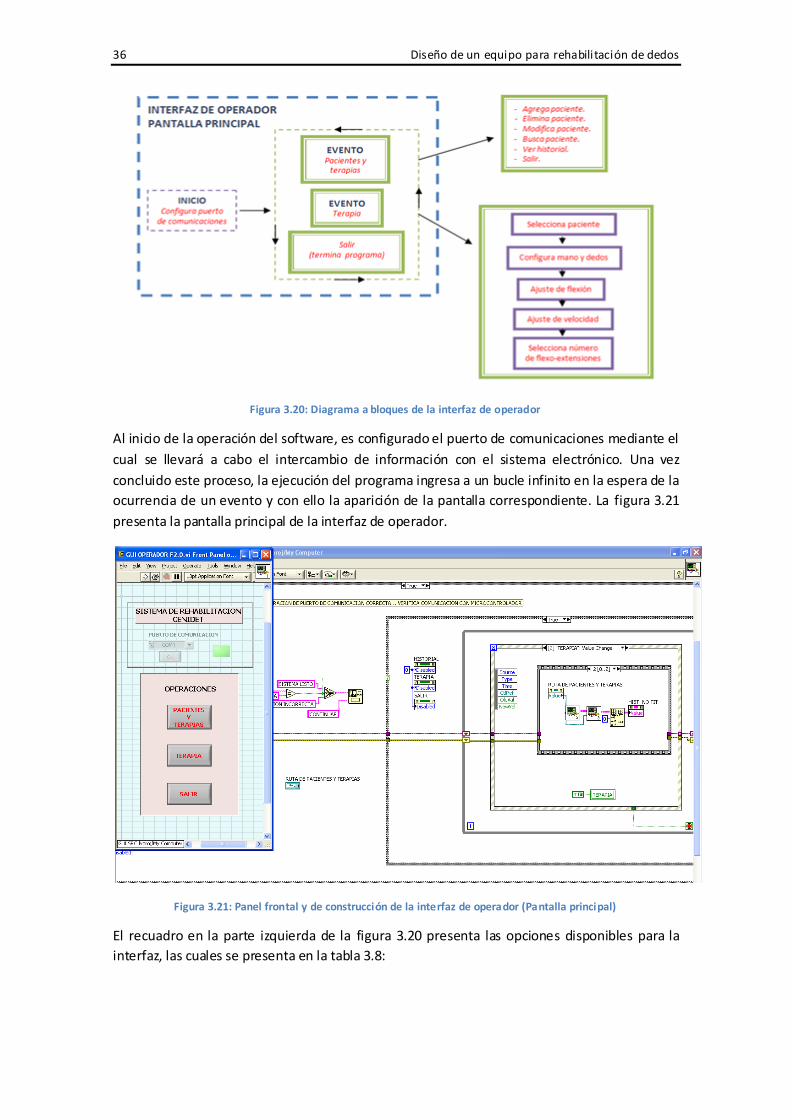
36 Diseño de un equipo para rehabilitación de dedos
Figura 3.20: Diagrama a bloques de la interfaz de operador
Al inicio de la operación del software, es configurado el puerto de comunicaciones mediante el
cual se llevará a cabo el intercambio de información con el sistema electrónico. Una vez
concluido este proceso, la ejecución del programa ingresa a un bucle infinito en la espera de la
ocurrencia de un evento y con ello la aparición de la pantalla correspondiente. La figura 3.21
presenta la pantalla principal de la interfaz de operador.
Figura 3.21: Panel frontal y de construcción de la interfaz de operador (Pantalla principal)
El recuadro en la parte izquierda de la figura 3.20 presenta las opciones disponibles para la
interfaz, las cuales se presenta en la tabla 3.8:
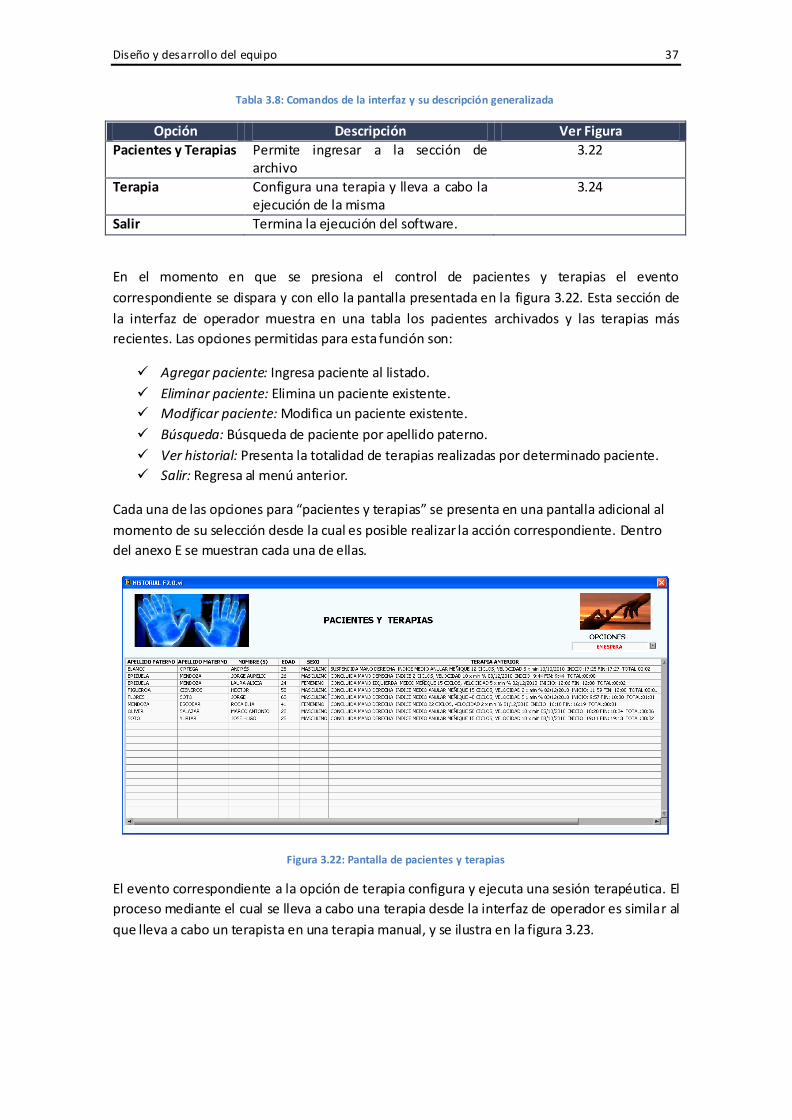
Diseño y desarrollo del equipo 37
Tabla 3.8: Comandos de la interfaz y su descripción generalizada
Opción Descripción Ver Figura
Pacientes y Terapias Permite ingresar a la sección de archivo
3.22
Terapia Configura una terapia y lleva a cabo la ejecución de la misma
3.24
Salir Termina la ejecución del software.
En el momento en que se presiona el control de pacientes y terapias el evento
correspondiente se dispara y con ello la pantalla presentada en la figura 3.22. Esta sección de
la interfaz de operador muestra en una tabla los pacientes archivados y las terapias más
recientes. Las opciones permitidas para esta función son:
Agregar paciente: Ingresa paciente al listado.
Eliminar paciente: Elimina un paciente existente.
Modificar paciente: Modifica un paciente existente.
Búsqueda: Búsqueda de paciente por apellido paterno.
Ver historial: Presenta la totalidad de terapias realizadas por determinado paciente.
Salir: Regresa al menú anterior.
Cada una de las opciones para “pacientes y terapias” se presenta en una pantalla adicional al
momento de su selección desde la cual es posible realizar la acción correspondiente. Dentro
del anexo E se muestran cada una de ellas.
Figura 3.22: Pantalla de pacientes y terapias
El evento correspondiente a la opción de terapia configura y ejecuta una sesión terapéutica. El
proceso mediante el cual se lleva a cabo una terapia desde la interfaz de operador es similar al
que lleva a cabo un terapista en una terapia manual, y se ilustra en la figura 3.23.
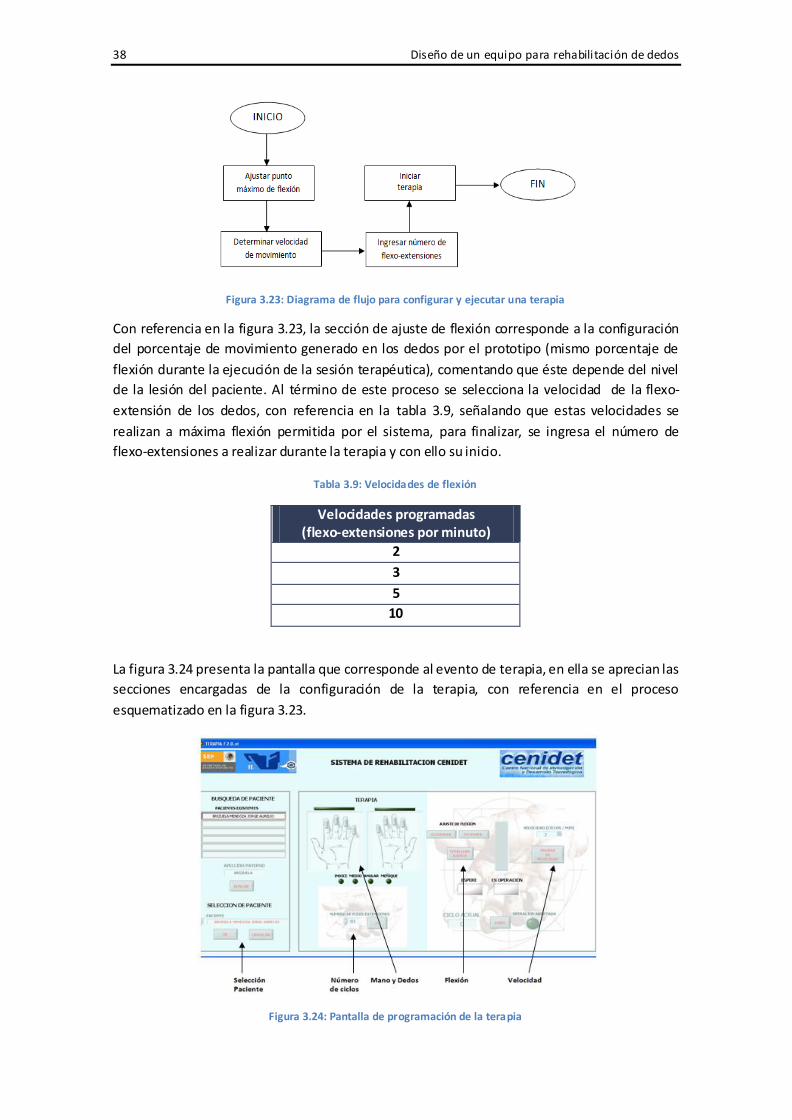
38 Diseño de un equipo para rehabilitación de dedos
Figura 3.23: Diagrama de flujo para configurar y ejecutar una terapia
Con referencia en la figura 3.23, la sección de ajuste de flexión corresponde a la configuración
del porcentaje de movimiento generado en los dedos por el prototipo (mismo porcentaje de
flexión durante la ejecución de la sesión terapéutica), comentando que éste depende del nivel
de la lesión del paciente. Al término de este proceso se selecciona la velocidad de la flexo-
extensión de los dedos, con referencia en la tabla 3.9, señalando que estas velocidades se
realizan a máxima flexión permitida por el sistema, para finalizar, se ingresa el número de
flexo-extensiones a realizar durante la terapia y con ello su inicio.
Tabla 3.9: Velocidades de flexión
Velocidades programadas (flexo-extensiones por minuto)
2
3
5
10
La figura 3.24 presenta la pantalla que corresponde al evento de terapia, en ella se aprecian las
secciones encargadas de la configuración de la terapia, con referencia en el proceso
esquematizado en la figura 3.23.
Figura 3.24: Pantalla de programación de la terapia
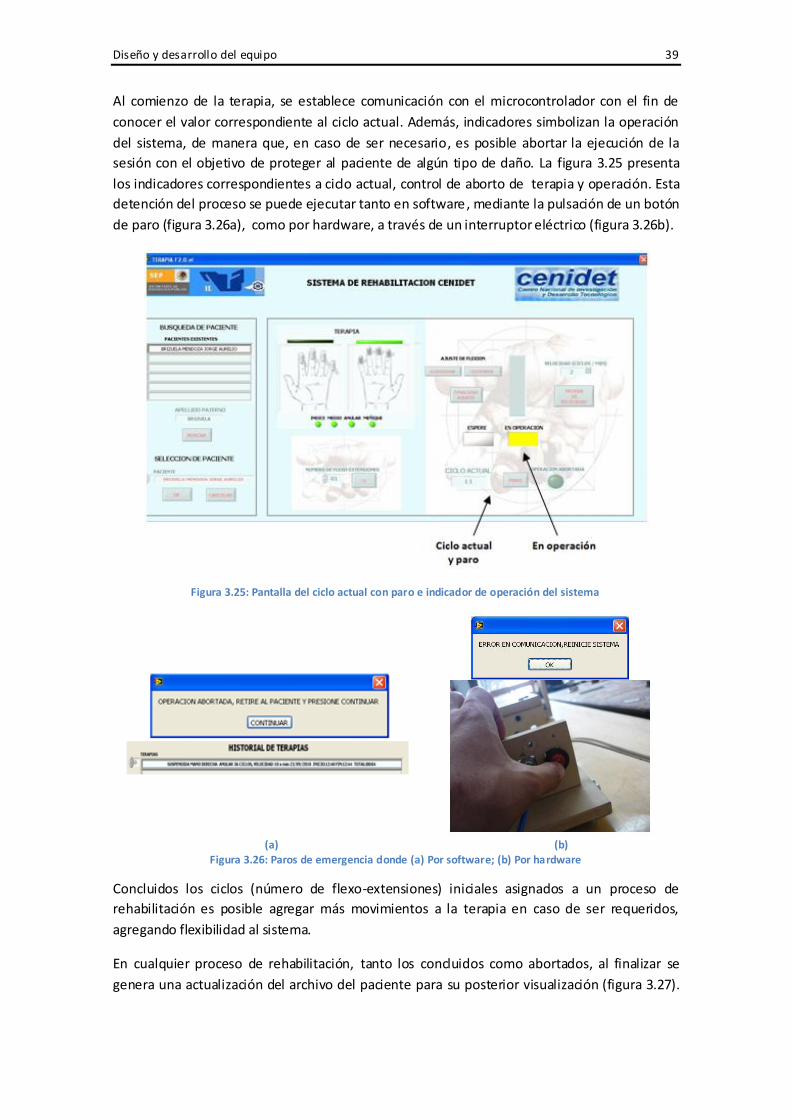
Diseño y desarrollo del equipo 39
Al comienzo de la terapia, se establece comunicación con el microcontrolador con el fin de
conocer el valor correspondiente al ciclo actual. Además, indicadores simbolizan la operación
del sistema, de manera que, en caso de ser necesario, es posible abortar la ejecución de la
sesión con el objetivo de proteger al paciente de algún tipo de daño. La figura 3.25 presenta
los indicadores correspondientes a ciclo actual, control de aborto de terapia y operación. Esta
detención del proceso se puede ejecutar tanto en software, mediante la pulsación de un botón
de paro (figura 3.26a), como por hardware, a través de un interruptor eléctrico (figura 3.26b).
Figura 3.25: Pantalla del ciclo actual con paro e indicador de operación del sistema
(a) (b)
Figura 3.26: Paros de emergencia donde (a) Por software; (b) Por hardware
Concluidos los ciclos (número de flexo-extensiones) iniciales asignados a un proceso de
rehabilitación es posible agregar más movimientos a la terapia en caso de ser requeridos,
agregando flexibilidad al sistema.
En cualquier proceso de rehabilitación, tanto los concluidos como abortados, al finalizar se
genera una actualización del archivo del paciente para su posterior visualización (figura 3.27).
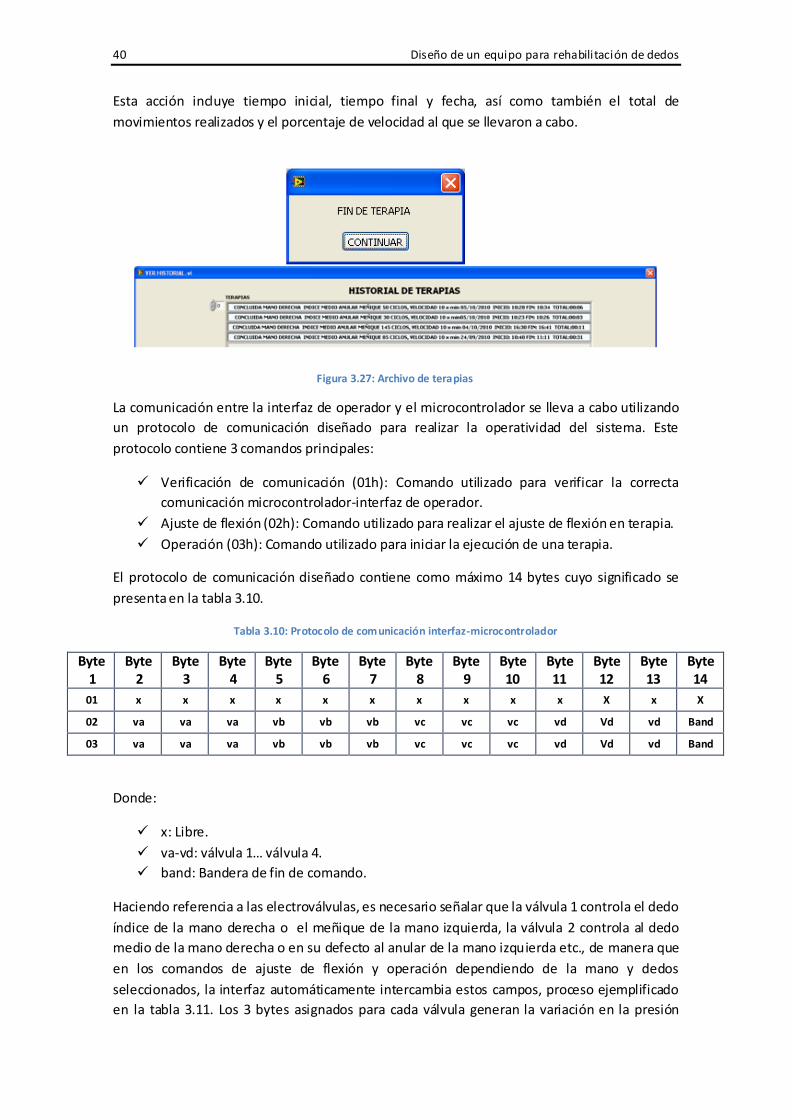
40 Diseño de un equipo para rehabilitación de dedos
Esta acción incluye tiempo inicial, tiempo final y fecha, así como también el total de
movimientos realizados y el porcentaje de velocidad al que se llevaron a cabo.
Figura 3.27: Archivo de terapias
La comunicación entre la interfaz de operador y el microcontrolador se lleva a cabo utilizando
un protocolo de comunicación diseñado para realizar la operatividad del sistema. Este
protocolo contiene 3 comandos principales:
Verificación de comunicación (01h): Comando utilizado para verificar la correcta
comunicación microcontrolador-interfaz de operador.
Ajuste de flexión (02h): Comando utilizado para realizar el ajuste de flexión en terapia.
Operación (03h): Comando utilizado para iniciar la ejecución de una terapia.
El protocolo de comunicación diseñado contiene como máximo 14 bytes cuyo significado se
presenta en la tabla 3.10.
Tabla 3.10: Protocolo de comunicación interfaz-microcontrolador
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
Byte 8
Byte 9
Byte 10
Byte 11
Byte 12
Byte 13
Byte 14
01 x x x x x x x x x x X x X
02 va va va vb vb vb vc vc vc vd Vd vd Band
03 va va va vb vb vb vc vc vc vd Vd vd Band
Donde:
x: Libre.
va-vd: válvula 1… válvula 4.
band: Bandera de fin de comando.
Haciendo referencia a las electroválvulas, es necesario señalar que la válvula 1 controla el dedo
índice de la mano derecha o el meñique de la mano izquierda, la válvula 2 controla al dedo
medio de la mano derecha o en su defecto al anular de la mano izquierda etc., de manera que
en los comandos de ajuste de flexión y operación dependiendo de la mano y dedos
seleccionados, la interfaz automáticamente intercambia estos campos, proceso ejemplificado
en la tabla 3.11. Los 3 bytes asignados para cada válvula generan la variación en la presión

Diseño y desarrollo del equipo 41
hacia los músculos neumáticos, mismos que permiten el máximo correspondiente al 20% de
contracción para los actuadores.
Tabla 3.11: Asignación de válvulas en dedos
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
Byte 8
Byte 9
Byte 10
Byte 11
Byte 12
Byte 13
Byte 14
MANO DERECHA 02 va va Va vb vb vb vc vc vc vd vd vd Band
03 va va Va vb vb vb vc vc vc vd vd vd Band
MANO IZQUIERDA
02 vd vd Vd vc vc vc vb vb vb va va va Band
03 vd vd Vd vc vc vc vb vb vb va va va Band
El protocolo de comunicación programado en el microcontrolador, en conjunción con la
interfaz de operador permiten la operatividad del sistema de rehabilitación.
42 Diseño de un equipo para rehabilitación de dedos
Bibliografía y Referencias [3.1] http://www.solidworks.com/ [3.2] Shigley Joseph E., Mitchell Larry D., “Diseño en Ingeniería Mecánica”, 3ª edición, ISBN: 0-
07-056888-X [3.3] www.microchip.com. Página de componentes electrónicos, fecha de consulta noviembre
2010. [3.4] José María Angulo Usategui, Aritza Etxeberrìa Ruiz, Ignacio Angulo Martínez, Iván
Trueba Parra. “dsPIC, Diseño práctico de aplicaciones”. Mc Graw Hill. [3.5] www.ftdichip.com. Página de componentes electrónicos, fecha de consulta noviembre
2010. [3.6] Mustafa A. Mustafa. “Digital and analogue interfacing for microcomputers”. Blackwell
Scientific Publications. [3.7] Douglas V. Hall. “Microprocessors and interfacing. Programming and Hardware”. Mc
Graw Hill. [3.8] http://www.maxim-ic.com. Empresa de manufactura de componentes electrónicos,
fecha de consulta noviembre 2010. [3.9] http://www.kysanelectronics.com. Empresa de manufactura de fuentes de
alimentación, fecha de consulta noviembre 2010. [3.10] www.altium.com. Pàgina de software de creación de circuitos esquemáticos e impresos
electrónicos. [3.11] Norton Robert L., “Diseño de Máquinas”, Editorial: Prentice Hall
4
4. Validación experimental del prototipo Las pruebas realizadas al sistema estuvieron basadas en la aproximación de la flexión
producida en cada dedo ante la máxima contracción del músculo neumático.
Se llevaron a cabo pruebas tanto en el software como en la circuitería electrónica y en el
prototipo, para con esto obtener una caracterización base del sistema completo tomando en
cuenta la máxima operación del actuador y la mayoría de las combinaciones posibles entre los
distintos dedos.
4.1. Comunicación interfaz de operador-sistema electrónico Debido a que es imprescindible el correcto funcionamiento de la conjunción entre la interfaz
de operador y el sistema electrónico, la prueba correspondiente a la comunicación tiene como
objetivo garantizar el correcto enlace digital entre estos dos elementos.
Cualquier proceso terapéutico controlado por el sistema de rehabilitación propuesto en este
trabajo involucra la comunicación iterativa con la interfaz de operador, de manera que el
proceso para realizar la presente prueba de comunicación tiene como fundamento el envío del
comando “Verificación de comunicación” continuamente, cotejando la respuesta emitida por
el sistema electrónico ante esta operación. El diagrama a bloques correspondiente a esta
prueba se presenta en la figura 4.1.
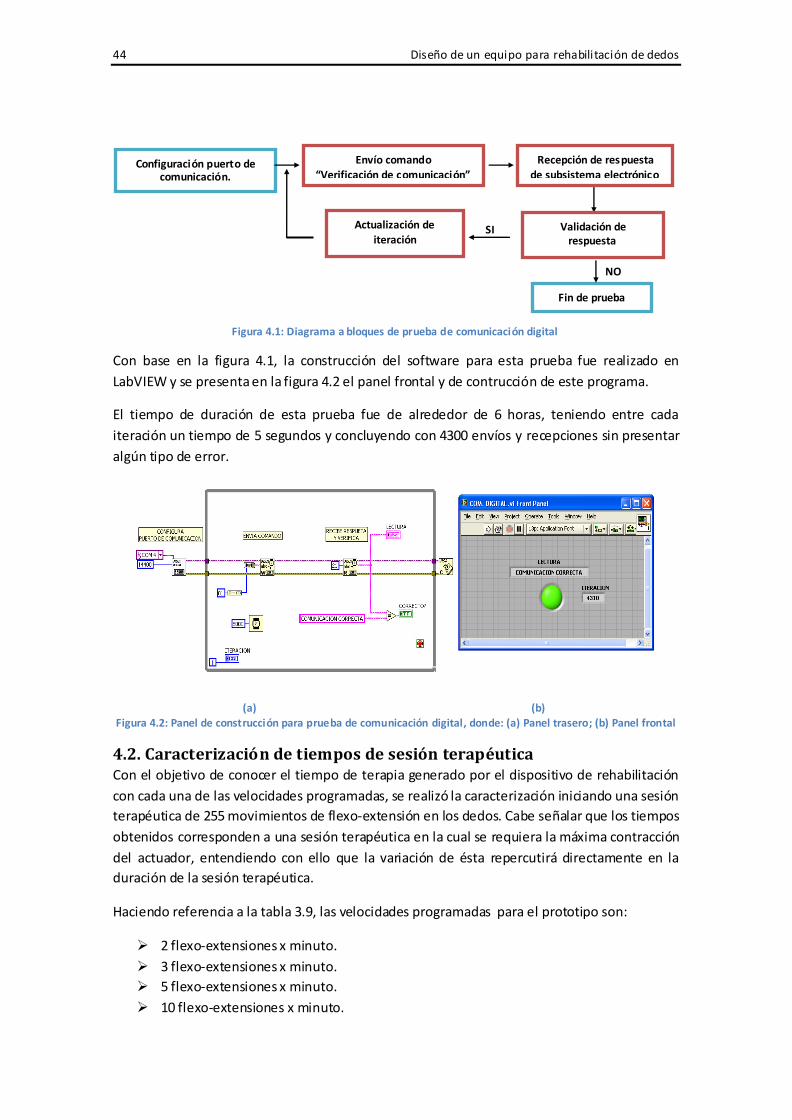
44 Diseño de un equipo para rehabilitación de dedos
Figura 4.1: Diagrama a bloques de prueba de comunicación digital
Con base en la figura 4.1, la construcción del software para esta prueba fue realizado en
LabVIEW y se presenta en la figura 4.2 el panel frontal y de contrucción de este programa.
El tiempo de duración de esta prueba fue de alrededor de 6 horas, teniendo entre cada
iteración un tiempo de 5 segundos y concluyendo con 4300 envíos y recepciones sin presentar
algún tipo de error.
(a) (b) Figura 4.2: Panel de construcción para prueba de comunicación digital, donde: (a) Panel trasero; (b) Panel frontal
4.2. Caracterización de tiempos de sesión terapéutica Con el objetivo de conocer el tiempo de terapia generado por el dispositivo de rehabilitación
con cada una de las velocidades programadas, se realizó la caracterización iniciando una sesión
terapéutica de 255 movimientos de flexo-extensión en los dedos. Cabe señalar que los tiempos
obtenidos corresponden a una sesión terapéutica en la cual se requiera la máxima contracción
del actuador, entendiendo con ello que la variación de ésta repercutirá directamente en la
duración de la sesión terapéutica.
Haciendo referencia a la tabla 3.9, las velocidades programadas para el prototipo son:
2 flexo-extensiones x minuto.
3 flexo-extensiones x minuto.
5 flexo-extensiones x minuto.
10 flexo-extensiones x minuto.
Recepción de respuesta
de subsistema electrónico
NO
Validación de respuesta
Correcto???
Fin de prueba
Configuración puerto de comunicación.
SI
Envío comando
“Verificación de comunicación”
Actualización de
iteración
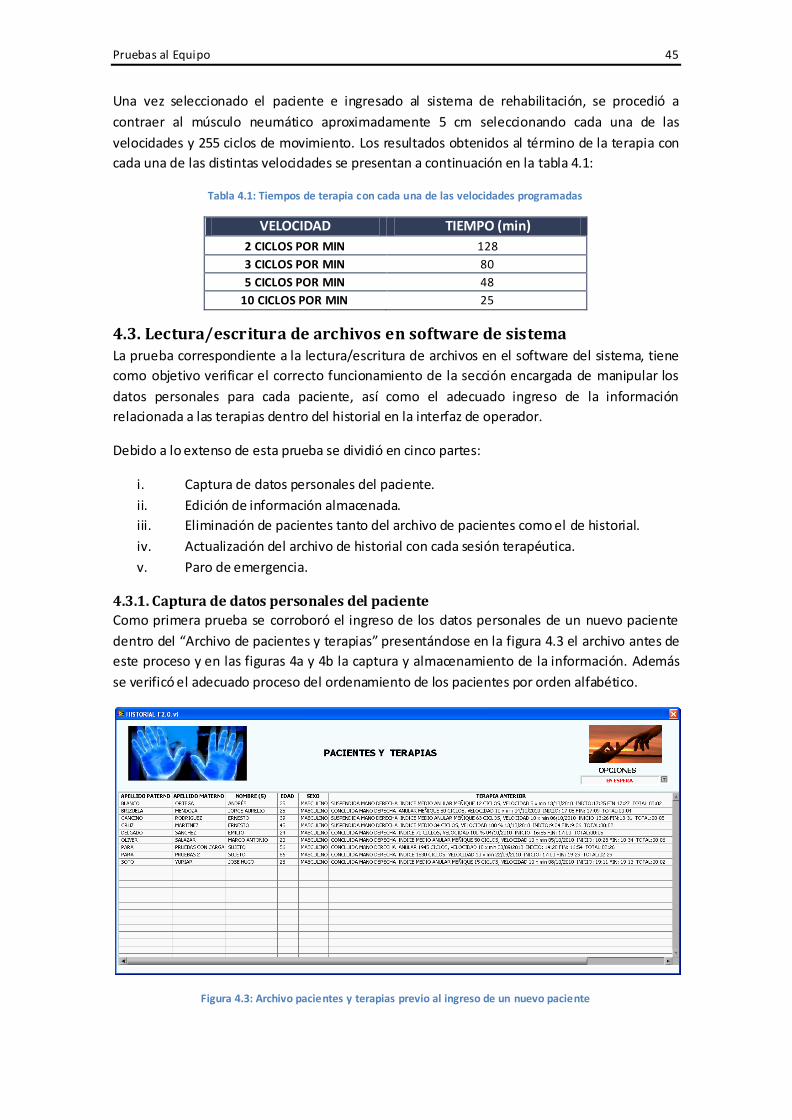
Pruebas al Equipo 45
Una vez seleccionado el paciente e ingresado al sistema de rehabilitación, se procedió a
contraer al músculo neumático aproximadamente 5 cm seleccionando cada una de las
velocidades y 255 ciclos de movimiento. Los resultados obtenidos al término de la terapia con
cada una de las distintas velocidades se presentan a continuación en la tabla 4.1:
Tabla 4.1: Tiempos de terapia con cada una de las velocidades programadas
VELOCIDAD TIEMPO (min)
2 CICLOS POR MIN 128
3 CICLOS POR MIN 80
5 CICLOS POR MIN 48
10 CICLOS POR MIN 25
4.3. Lectura/escritura de archivos en software de sistema La prueba correspondiente a la lectura/escritura de archivos en el software del sistema, tiene
como objetivo verificar el correcto funcionamiento de la sección encargada de manipular los
datos personales para cada paciente, así como el adecuado ingreso de la información
relacionada a las terapias dentro del historial en la interfaz de operador.
Debido a lo extenso de esta prueba se dividió en cinco partes:
i. Captura de datos personales del paciente.
ii. Edición de información almacenada.
iii. Eliminación de pacientes tanto del archivo de pacientes como el de historial.
iv. Actualización del archivo de historial con cada sesión terapéutica.
v. Paro de emergencia.
4.3.1. Captura de datos personales del paciente
Como primera prueba se corroboró el ingreso de los datos personales de un nuevo paciente
dentro del “Archivo de pacientes y terapias” presentándose en la figura 4.3 el archivo antes de
este proceso y en las figuras 4a y 4b la captura y almacenamiento de la información. Además
se verificó el adecuado proceso del ordenamiento de los pacientes por orden alfabético.
Figura 4.3: Archivo pacientes y terapias previo al ingreso de un nuevo paciente

46 Diseño de un equipo para rehabilitación de dedos
(a) (b)
Figura 4.4: Ingreso de paciente a archivo de paciente y terapias donde: (a) Datos personales de paciente nuevo; (b) Archivo correspondiente ordenado
Como es posible observarse, la figura 4.3 contiene como primer elemento “Blanco Ortega
Andrés” a diferencia de la figura 4.4b, la cual presenta el nuevo paciente con nombre “Arreola
Enríquez Alejandro” ingresado al archivo correspondiente y ordenado por apellido paterno.
Con esta prueba se verifica el funcionamiento del anexo de un nuevo nombre.
4.3.2. Edición de información
Tomando como referencia la figura 4.4b, se procederá a realizar la modificación de los datos
personales del paciente ingresado, con el objetivo de verificar el funcionamiento de la sección
correspondiente a “Modificar paciente” dentro del archivo. Las figuras 4.5a y 4.5b presentan el
proceso y los resultados de esta actualización ante un cambio en el apellido materno y edad.
(a) (b)
Figura 4.5: Modificación de paciente donde: (a) Modificación de campos; (b) Actualización de archivo
4.3.3. Eliminación de paciente
De igual manera, con referencia en la figura 4.5b, se procederá a eliminar un paciente del
archivo (Cancino Rodríguez Ernesto), con el objetivo de verificar el funcionamiento de esta
etapa (ver figura 4.6a y 4.6b).
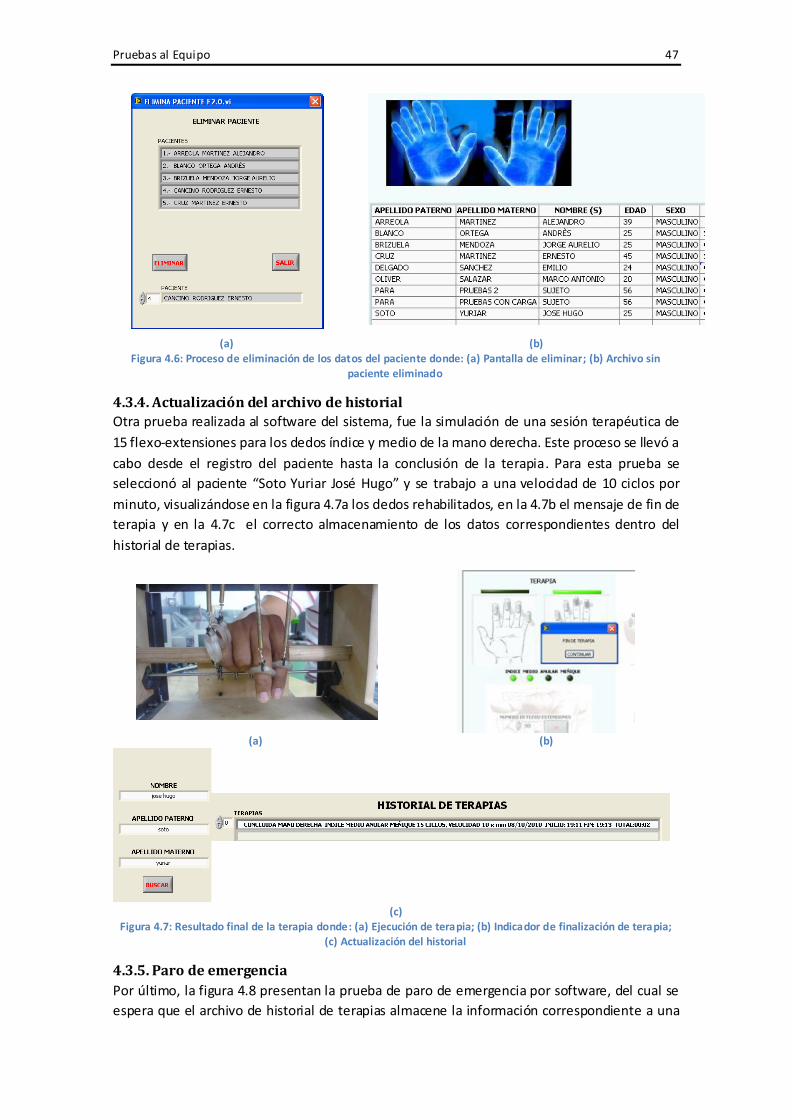
Pruebas al Equipo 47
(a) (b)
Figura 4.6: Proceso de eliminación de los datos del paciente donde: (a) Pantalla de eliminar; (b) Archivo sin paciente eliminado
4.3.4. Actualización del archivo de historial
Otra prueba realizada al software del sistema, fue la simulación de una sesión terapéutica de
15 flexo-extensiones para los dedos índice y medio de la mano derecha. Este proceso se llevó a
cabo desde el registro del paciente hasta la conclusión de la terapia. Para esta prueba se
seleccionó al paciente “Soto Yuriar José Hugo” y se trabajo a una velocidad de 10 ciclos por
minuto, visualizándose en la figura 4.7a los dedos rehabilitados, en la 4.7b el mensaje de fin de
terapia y en la 4.7c el correcto almacenamiento de los datos correspondientes dentro del
historial de terapias.
(a) (b)
(c)
Figura 4.7: Resultado final de la terapia donde: (a) Ejecución de terapia; (b) Indicador de finalización de terapia; (c) Actualización del historial
4.3.5. Paro de emergencia
Por último, la figura 4.8 presentan la prueba de paro de emergencia por software, del cual se
espera que el archivo de historial de terapias almacene la información correspondiente a una

48 Diseño de un equipo para rehabilitación de dedos
terapia suspendida, mientras que la figura 4.9 muestra la prueba correspondiente al paro de
emergencia por hardware, en las que se aprecia el “Error en comunicación” debido al falta de
energía para el sistema electrónico.
Figura 4.8: Paro de emergencia por software
Figura 4.9: Paro de emergencia por hardware
4.4. Pruebas operación continua Adicionalmente fue realizada una prueba al dispositivo que consistió en un ciclo continuo (dos
etapas) con la finalidad de conocer un aproximado del número de flexo-extensiones y tiempo
de trabajo sin paro alguno, además, si ocurría o no algún tipo de daño en el actuador. La
primera etapa de este proceso, sin carga, concluyó en 5600 flexo-extensiones con un tiempo
de trabajo de cerca de 8 horas. Por su parte, las pruebas con carga fueron ejecutadas
colocando un peso muerto de 150 grs. a la base del anillo, simulando con esto el peso del
dedo, como se aprecia en la figura 4.10.
Figura 4.10: Prueba al prototipo con carga

Pruebas al Equipo 49
De la misma manera que la prueba sin carga, se operó el sistema realizando flexo-extensiones
sin detención. Para este caso el proceso concluyó en 3200 ciclos en un tiempo aproximado de
5 horas. La figura 4.11 presenta el historial de terapias correspondiente.
Figura 4.11: Historial en prueba con carga
4.5. Flexión generada por el prototipo en los dedos Las aproximaciones del porcentaje de flexión fueron realizadas con el objetivo de conocer los
ángulos de flexión producidos, para los dedos de la mano humana, por el prototipo. Cabe
señalar que, dependiendo de la longitud falángica de cada individuo, estos ángulos varían, por
lo cual fue necesario medir cada uno de los dedos del sujeto bajo pruebas, conside rándose
estas medidas estándares. La medición de cada uno de los dedos de la mano derecha del
sujeto bajo prueba se listan en la tabla 4.2.
Tabla 4.2: Longitud falángica en pruebas al sistema
MANO DERECHA
DEDO PROXIMAL(mm) MEDIAL(mm) DISTAL(mm)
INDICE 45 30 26
MEDIO 50 35 32
ANULAR 45 35 30
MEÑIQUE 35 25 23
El proceso de caracterización de flexión fue realizado mediante la aproximación de los ángulos
que guardan cada una de las falanges desde la posición inicial hasta la máxima generada por el
dispositivo. Los ángulos medidos en el dedo humano se encuentran representados en la figura
4.12.
Figura 4.12: Simbolización de ángulos por falange
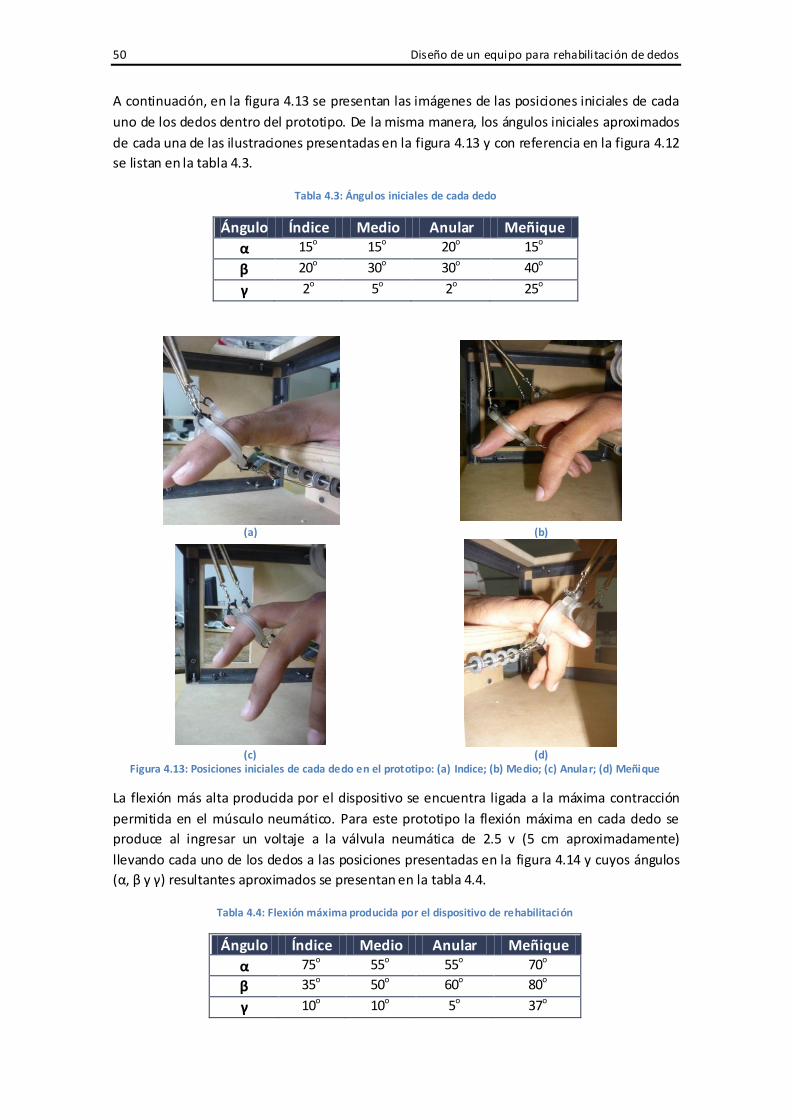
50 Diseño de un equipo para rehabilitación de dedos
A continuación, en la figura 4.13 se presentan las imágenes de las posiciones iniciales de cada
uno de los dedos dentro del prototipo. De la misma manera, los ángulos iniciales aproximados
de cada una de las ilustraciones presentadas en la figura 4.13 y con referencia en la figura 4.12
se listan en la tabla 4.3.
Tabla 4.3: Ángulos iniciales de cada dedo
Ángulo Índice Medio Anular Meñique
α 15o 15o 20o 15o
β 20o 30o 30o 40o
γ 2o 5o 2o 25o
(a) (b)
(c) (d)
Figura 4.13: Posiciones iniciales de cada dedo en el prototipo: (a) Indice; (b) Medio; (c) Anular; (d) Meñique
La flexión más alta producida por el dispositivo se encuentra ligada a la máxima contracción
permitida en el músculo neumático. Para este prototipo la flexión máxima en cada dedo se
produce al ingresar un voltaje a la válvula neumática de 2.5 v (5 cm aproximadamente)
llevando cada uno de los dedos a las posiciones presentadas en la figura 4.14 y cuyos ángulos
(α, β y γ) resultantes aproximados se presentan en la tabla 4.4.
Tabla 4.4: Flexión máxima producida por el dispositivo de rehabilitación
Ángulo Índice Medio Anular Meñique
α 75o 55o 55o 70o
β 35o 50o 60o 80o
γ 10o 10o 5o 37o
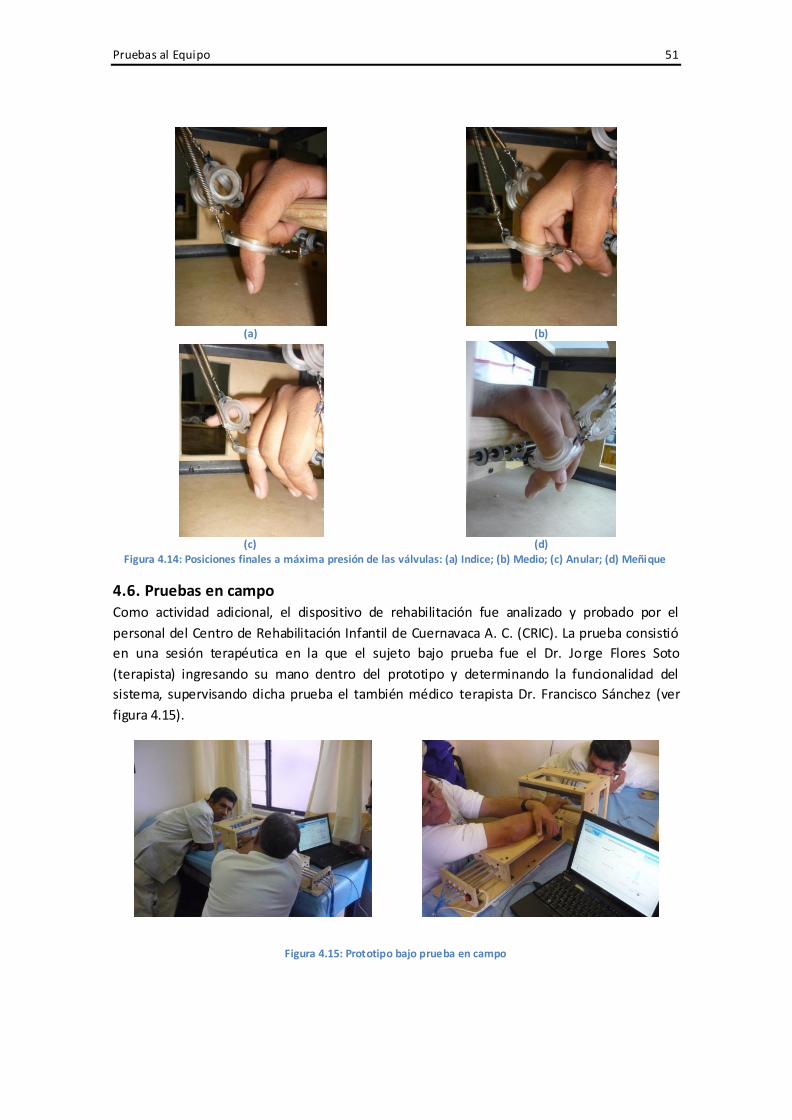
Pruebas al Equipo 51
(a) (b)
(c) (d)
Figura 4.14: Posiciones finales a máxima presión de las válvulas: (a) Indice; (b) Medio; (c) Anular; (d) Meñique
4.6. Pruebas en campo Como actividad adicional, el dispositivo de rehabilitación fue analizado y probado por el
personal del Centro de Rehabilitación Infantil de Cuernavaca A. C. (CRIC). La prueba consistió
en una sesión terapéutica en la que el sujeto bajo prueba fue el Dr. Jorge Flores Soto
(terapista) ingresando su mano dentro del prototipo y determinando la funcionalidad del
sistema, supervisando dicha prueba el también médico terapista Dr. Francisco Sánchez (ver
figura 4.15).
Figura 4.15: Prototipo bajo prueba en campo
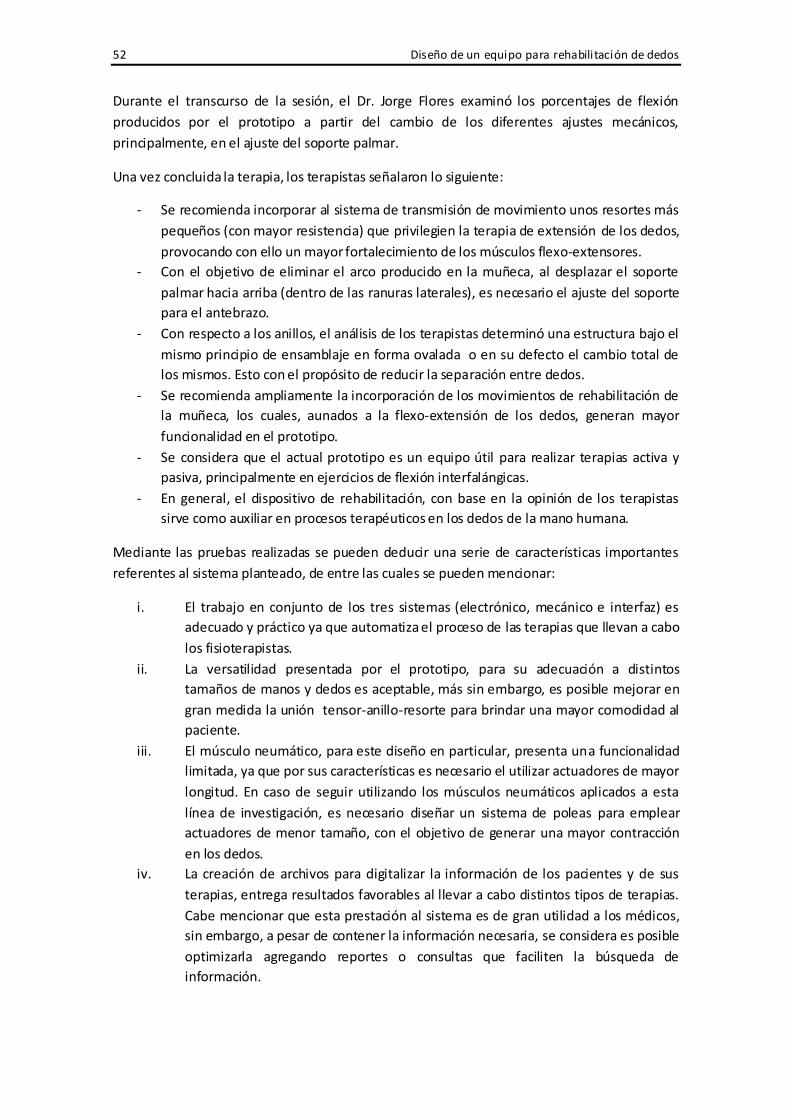
52 Diseño de un equipo para rehabilitación de dedos
Durante el transcurso de la sesión, el Dr. Jorge Flores examinó los porcentajes de flexión
producidos por el prototipo a partir del cambio de los diferentes ajustes mecánicos,
principalmente, en el ajuste del soporte palmar.
Una vez concluida la terapia, los terapistas señalaron lo siguiente:
- Se recomienda incorporar al sistema de transmisión de movimiento unos resortes más
pequeños (con mayor resistencia) que privilegien la terapia de extensión de los dedos,
provocando con ello un mayor fortalecimiento de los músculos flexo-extensores.
- Con el objetivo de eliminar el arco producido en la muñeca, al desplazar el soporte
palmar hacia arriba (dentro de las ranuras laterales), es necesario el ajuste del soporte
para el antebrazo.
- Con respecto a los anillos, el análisis de los terapistas determinó una estructura bajo el
mismo principio de ensamblaje en forma ovalada o en su defecto el cambio total de
los mismos. Esto con el propósito de reducir la separación entre dedos.
- Se recomienda ampliamente la incorporación de los movimientos de rehabilitación de
la muñeca, los cuales, aunados a la flexo-extensión de los dedos, generan mayor
funcionalidad en el prototipo.
- Se considera que el actual prototipo es un equipo útil para realizar terapias activa y
pasiva, principalmente en ejercicios de flexión interfalángicas.
- En general, el dispositivo de rehabilitación, con base en la opinión de los terapistas
sirve como auxiliar en procesos terapéuticos en los dedos de la mano humana.
Mediante las pruebas realizadas se pueden deducir una serie de características importantes
referentes al sistema planteado, de entre las cuales se pueden mencionar:
i. El trabajo en conjunto de los tres sistemas (electrónico, mecánico e interfaz) es
adecuado y práctico ya que automatiza el proceso de las terapias que llevan a cabo
los fisioterapistas.
ii. La versatilidad presentada por el prototipo, para su adecuación a distintos
tamaños de manos y dedos es aceptable, más sin embargo, es posible mejorar en
gran medida la unión tensor-anillo-resorte para brindar una mayor comodidad al
paciente.
iii. El músculo neumático, para este diseño en particular, presenta una funcionalidad
limitada, ya que por sus características es necesario el utilizar actuadores de mayor
longitud. En caso de seguir utilizando los músculos neumáticos aplicados a esta
línea de investigación, es necesario diseñar un sistema de poleas para emplear
actuadores de menor tamaño, con el objetivo de generar una mayor contracción
en los dedos.
iv. La creación de archivos para digitalizar la información de los pacientes y de sus
terapias, entrega resultados favorables al llevar a cabo distintos tipos de terapias.
Cabe mencionar que esta prestación al sistema es de gran utilidad a los médicos,
sin embargo, a pesar de contener la información necesaria, se considera es posible
optimizarla agregando reportes o consultas que faciliten la búsqueda de
información.
Pruebas al Equipo 53
v. La sección electrónica de este dispositivo presenta la posibilidad del anexo de
sensores con el objetivo de cerrar el lazo de control, esto con el objetivo de
permitir un mayor control de las funciones del prototipo.

54 Diseño de un equipo para rehabilitación de dedos

5
5. Conclusiones y recomendaciones Como se asentó en el capítulo introductorio, el diseño y construcción del dispositivo de
rehabilitación descrito durante los capítulos anteriores, surge como una necesidad de la
aplicación de los conocimientos generados previamente en el cenidet referentes a los
prototipos morfológicos, principalmente las manos.
De esta manera, gracias a las pruebas realizadas durante el desarrollo del presente trabajo de
tesis, se consideran las siguientes aportaciones y conclusiones:
Sobre el sistema mecánico:
Se planteó un diseño sencillo y versátil el cual permite ajustar de manera manual y
simple el dispositivo a distintos tamaños de manos y dedos.
Con el ajuste realizado mediante la base móvil, se lleva a cabo la precarga de los
músculos neumáticos, aprovechando con esto casi en su totalidad la contracción del
músculo.
El ajuste del soporte de la palma permite una mayor comodidad en cuanto a la
posición de la mano del paciente, ya que al tener distintos puntos de ajuste y
dependiendo del tipo de lesión, es posible el reacomodo del mismo.
El sistema de transmisión de movimiento presentado en la sección 3.1.2
específicamente en los anillos, presenta la versatilidad de contar con una parte
56 Diseño de un equipo para rehabilitación de dedos
externa que contiene un diámetro interno variable. Por esta razón es posible atender a
una mayor cantidad de pacientes, ya que solamente es necesario seleccionar el que
mejor se le ajuste al lesionado y posteriormente realizar el ensamblaje
correspondiente.
Una de las principales aportaciones en el sistema mecánico es la posibilidad de llevar a
cabo no sólo terapia pasiva, sino que gracias a la combinación del anillo con el resorte
utilizado, es viable el realizar terapias activas debido a la resistencia que presenta el
resorte por su constante de rigidez.
No obstante los aportes antes mencionados en el diseño mecánico, se detectó que
para el diseño presentado el actuador empleado tiene ciertas carencias, esto debido a
que el músculo tiene como característica primordial que su contracción máxima
depende directamente de la longitud del mismo, siendo esta del 20% como máximo.
Dados los actuadores empleados de longitud de 12”, con una contracción de 2.4”
reflejada en las flexiones presentadas en la tabla 4.4, si fuese deseada una mayor
flexión, es necesario aumentar su tamaño, lo cual tiene como consecuencia el
incremento de las dimensiones del dispositivo y por lo tanto su portatibilidad.
Sobre el sistema electrónico:
Haciendo referencia al diseño y construcción de la tarjeta de circuito impreso para
componentes de montaje superficial, conformada por los módulos expuestos en la
sección 3.2, se señala que la electrónica está lista para ser usada en el caso de requerir
cerrar el lazo de control.
La habilitación del módulo de electrónica y neumática permite su alejamiento del
prototipo, brindando al sistema un mayor confort, esto debido a que las
electroválvulas, al estar operando, generan demasiado ruido.
Actualmente la conexión mediante USB es la más empleada por las características de
operación que presenta y por ser un conector, que como su nombre lo indica, es más
universal. Gracias al controlador del FTDI se anexó la conexión por dicho protocolo.
Esto reitera la versatilidad del sistema, ya que puede operar desde cualquier
computadora que cuente con un puerto USB y contenga instalado el controlador del
circuito integrado además de la interfaz del sistema.
De la misma manera, en cuestiones de alimentación eléctrica, el sistema cuenta con
una fuente conmutada que tiene a su entrada un voltaje de 127 v. y genera 24 v. como
salida. Este voltaje es entregado directamente a las válvulas para después ser regulado
mediante la tarjeta electrónica a 12 y 5 volts, energía necesaria para que todos los
componentes operen de manera correcta.
Sobre la interfaz de usuario:
Con base en una terapia real manual, la GUI presentada en el apartado 3.3 obedece a
una secuencia muy apegada a dicho proceso, en el cual, el usuario configura el ángulo
de flexión y las características de velocidad, para que al final sea posible el ingresar
únicamente el número de repeticiones y con ello la ejecución de la sesión terapéutica.
Conclusiones y recomendaciones 57
Otra aportación relacionada al software, de gran importancia, es la digitalización de la
información de los pacientes. El llevar el historial de las terapias realizadas permite al
terapista monitorear la evolución médica de cada individuo.
Previniendo los posibles daños que pueda sufrir algún paciente (dolor o incomodidad)
al estar llevando a cabo la terapia, se habilitó una opción de paro de emergencia por
software, la cual suspende casi de manera instantánea la terapia ejecutada en ese
momento permitiendo el retiro del lesionado.
En caso de que el prototipo presente alguna anomalía al momento de operar, es
posible desenergizarlo mediante un botón de paro por hardware. Al detectar esto, la
interfaz genera un mensaje de error en comunicación, haciéndose necesario el reinicio
de la GUI y la correspondiente re conexión de la energía eléctrica.
Sobre el tipo de control empleado:
La programación del firmware del microcontrolador, en conjunto con la GUI, lleva a
cabo el control del dispositivo empleando un lazo abierto, esto debido a las
características de operación de las electroválvulas. Estas características especifican
que para un determinado voltaje de entrada y con una presión de aire de alimentación
constante, la válvula entregará siempre la misma presión de salida.
Las variaciones de voltaje medidas a la entrada de las válvulas oscilan alrededor de 0.2
volts, lo cual es despreciable desde el punto de vista de la presión de salida y por
consiguiente en la contracción del músculo.
Por último, haciendo referencia a la codificación del microcontrolador, el programa
presenta sencillez y facilidad de comprensión, permitiendo con ello realizar
modificaciones (cerrar el lazo de control, por ejemplo) en caso de ser necesario.
Sobre la aplicación en campo:
El contacto directo entre las instituciones CRIC y cenidet permitieron la prueba del
dispositivo en campo, generando con ello la visualización de posibles mejoras en el
desempeño del prototipo. Como comentarios generales del personal de rehabilitación
del CRIC, se considera al sistema de rehabilitación cenidet funcional en procesos
terapéuticos, cumpliendo con ello el objetivo desde el punto de vista de personas
especializadas en materia.
Así, la valoración positiva del trabajo realizado, es cimentada en su aportación a la aplicación
de los conocimientos generados previamente en cenidet acerca de efectores morfológicos y de
los músculos neumáticos.
Después de analizar el comportamiento de la operación del prototipo, se concluye que el
Equipo Auxiliar en Terapias de Rehabilitación de Extremidades del Miembro Superior a Nivel
de Dedos reportado en el presente documento cumplió con el objetivo de generar mediante
mecánica, electrónica y computación el movimiento de flexo-extensión en los dedos de la
mano humana, siendo con ello una alternativa viable como auxiliar en el desarrollo de terapias
activa y pasiva de pacientes. De acuerdo a la sección 4 de este escrito, la flexión producida por
el dispositivo es suficiente para reeducar, en gran medida, los arcos de movimiento de una
persona con discapacidad.
58 Diseño de un equipo para rehabilitación de dedos
5.1 Comparativa con trabajos presentados en el estado del arte Como trabajo adicional se llevó a cabo una comparación entre el dispositivo de rehabilitación
presentado en esta investigación y los mostrados en el en estado del arte, resultando de este
cotejo lo siguiente:
Con respecto al sistema de rehabilitación presentado en [2.8], la discrepancia está que
el sistema de rehabilitación cenidet permite la adecuación a diferentes tamaños de
dedos, cuestión no mencionada en el artículo.
Los artículos [2.9], [2.10] y [2.11], especifican una rehabilitación de tipo pasiva sin la
posibilidad de la terapia activa, siendo esta la principal aportación del sistema cenidet
en contraste con estos dispositivos.
En [2.13] se presenta una rehabilitación de tipo activa únicamente, a diferencia de la
posibilidad de rehabilitación pasiva del prototipo cenidet.
Además, una gran ventaja del sistema desarrollado es el costo de fabricación
(alrededor de $2000.00 M. N.) y que en comparación a [2.14] y [2.15] es
considerablemente menor debido a las características presentadas por cada uno de los
dispositivos.
En conclusión, basados en esta comparativa, no obstante las desventajas de diseño y
construcción del prototipo desarrollado en este trabajo de tesis, se supera funcionalmente y
en costo a algunos de los dispositivos presentados.
5.2 Recomendaciones para trabajos futuros Los resultados obtenidos, gracias a las pruebas realizadas, han permitido sugerir una serie de
mejoras y trabajos futuros sobre la misma línea de investigación (fisioterapia) mencionadas a
continuación:
Respecto al sistema mecánico:
Optimizar el sistema de ajuste del prototipo, de manera que en lugar de tener tres
puntos de ajuste, al llevar a cabo sólo uno el dispositivo se acople a distintos tamaños
de manos.
Cambiar el sistema de acoplamiento entre el paciente y el prototipo. El juego de anillos
a pesar de ser una solución aceptable para el problema de los distintos tamaños de
dedos, presenta la desventaja de la incomodidad del paciente después de cierto
tiempo, por lo que se sugiere sea cambiado por algo de material más flexible como por
ejemplo una especie de guante, fácilmente ensamblado al resorte y al tensor del
músculo.
En caso de seguir empleando músculos neumáticos como actuadores, se propone se
lleve a cabo el diseño de un sistema de poleas, para reducir el tamaño del músculo y
generar mayor flexión en los dedos.
Si se opta por cambiar el actuador, se sugiere el empleo de motores de CD,
servomotores o motores a pasos.
Por último, se propone se agregue la rehabilitación de los dedos pulgares. El diseño del
prototipo presentado en este trabajo de investigación considera el espacio necesario
para incluir el mecanismo necesario para habilitar dicha opción.

Conclusiones y recomendaciones 59
Respecto a la GUI:
Agregar la funcionalidad de impresión de reportes, como por ejemplo el historial de
algún paciente, una lista de pacientes, etc., así como también la generación de
consultas para buscar información más concreta.
Respecto al control:
Implementar un método de sensado para cerrar el lazo de control. Para ello se
propone la inclusión de sensores de movimiento lineal (en un eje) y se mida el
desplazamiento del músculo neumático a determinada presión de aire.
Validar diferentes esquemas de control, desde los convencionales PID´s, hasta
esquemas más robustos que controlen las dinámicas no lineales propias de los
músculos neumáticos.
Implementar esquemas de control de trayectorias que permitan al paciente ejercitar
los dedos siguiendo diferentes trayectorias de movimientos (combinación de
movimientos de extensión-flexión y aducción-abducción).
Respecto a la aplicación en campo:
Con el fin de ampliar la visión de sistemas mecatrónicos aplicados a rehabilitación, se
recomienda continuar la comunicación con el CRIC, principalmente para la mejora del
sistema presentado en este documento de investigación además de posibles
desarrollos futuros.
60 Diseño de un equipo para rehabilitación de dedos
Anexos

62 Diseño de un equipo para rehabilitación de dedos

Anexos 63
Anexo A: Comparativa entre distintos tipos de actuadores
Alambres musculares: Es un pequeño alambre delgado que se contrae al calentarse
debido a la circulación de una corriente eléctrica a través de él, para después, relajarse
y regresar a la posición de reposo. Los materiales de los cuales se encuentran
constituidos estos dispositivos cambian su estructura molecular con la temperatura y
esto produce la contracción y extensión [1.2]. Una limitación en el uso de estos
actuadores son los bajos valores de fuerza que proporcionan siendo necesario
desarrollar “trenzas” para lograr las fuerzas requeridas.
El músculo neumático: Es un dispositivo mecánico basado en la imitación del
comportamiento del músculo biológico. Se trata de un tubo flexible, el cual al aplicarle
aire a presión, se deforma aumentando su diámetro, produciéndose una fuerza de
tracción axial y un movimiento de contracción [2.16].
Motores de DC: Los motores de DC son dispositivos eléctricos que transforman la
energía eléctrica en energía mecánica. Son insuperables en aplicaciones en las que
deben ajustarse la velocidad así como en las que se requiere un par grande [1.3].
Tabla A1: Comparativa entre actuadores
Músculos Neumáticos Alambres Musculares Motores de CD
Ventajas - Ligero
- Bajo costo. - Suave. - Flexible. - Potente.
- Amortiguado. - Contracción hasta
de 40% de longitud
- Pequeño
- Ligero
- Posicionamiento
rápido y preciso.
Desventajas - Tamaño respecto a los alambres musculares.
- Tiempo de vida, se deforman al contraerse después
de un tiempo determinado.
- Alto consumo de
corriente. - Deformación
Máxima del 5% al 10% de su longitud.
- Daños por fatiga.
- Tamaño. - Costo. - Circuitería externa.
- Consumo de corriente.
- Generación de
inercias.

64 Diseño de un equipo para rehabilitación de dedos
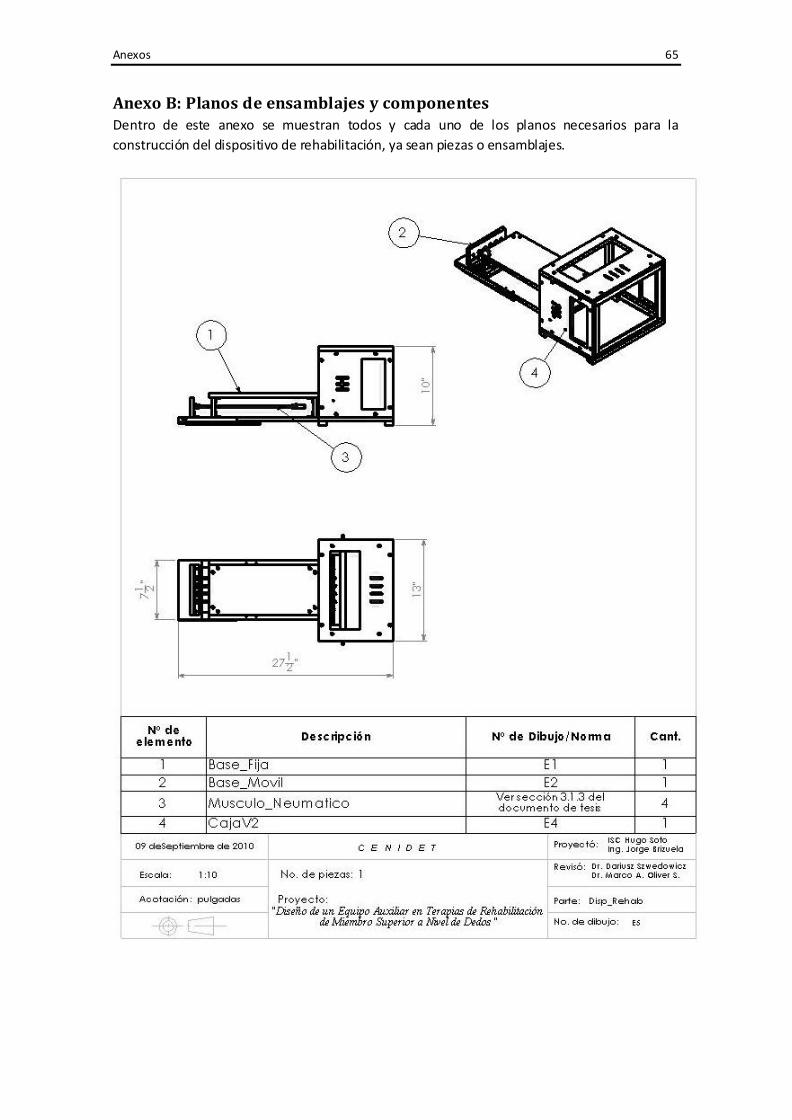
Anexos 65
Anexo B: Planos de ensamblajes y componentes Dentro de este anexo se muestran todos y cada uno de los planos necesarios para la
construcción del dispositivo de rehabilitación, ya sean piezas o ensamblajes.
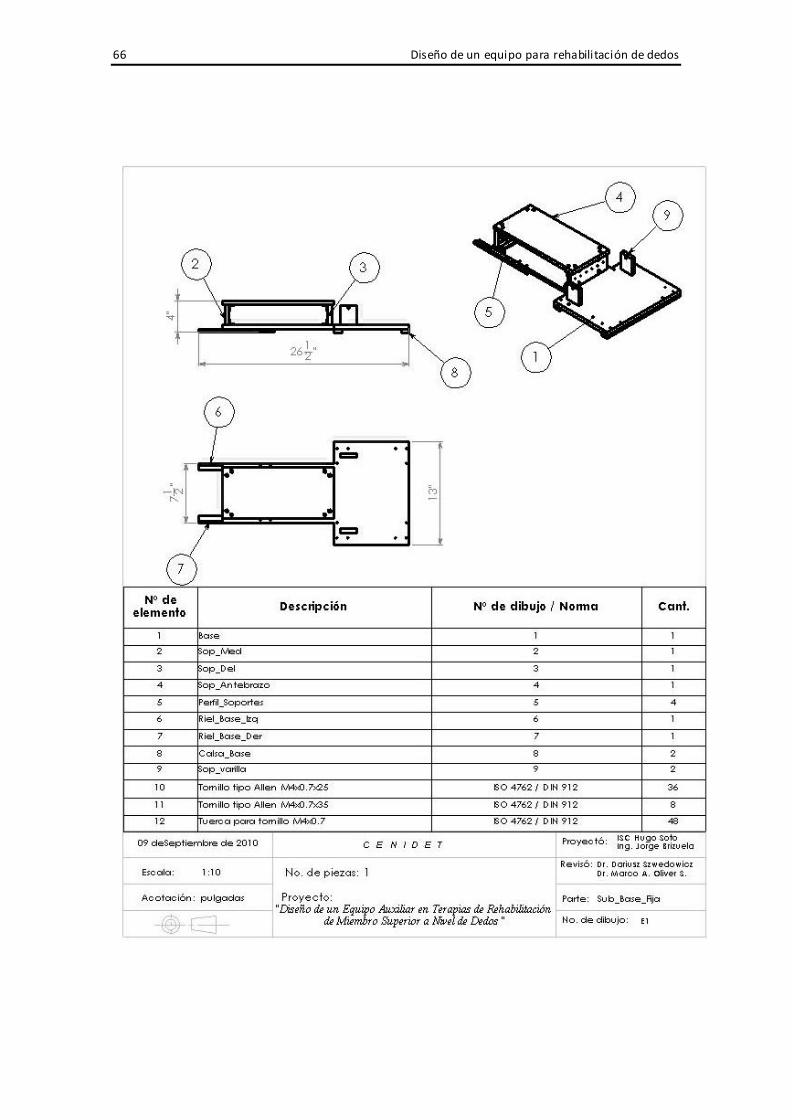
66 Diseño de un equipo para rehabilitación de dedos
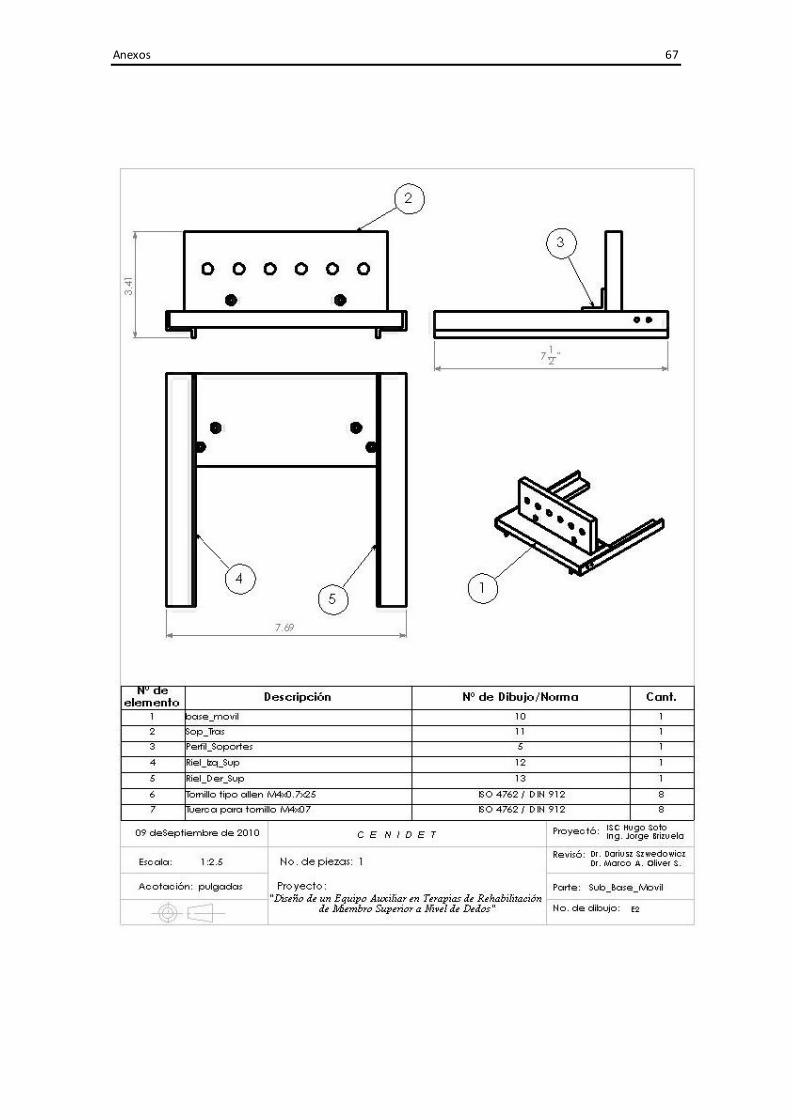
Anexos 67
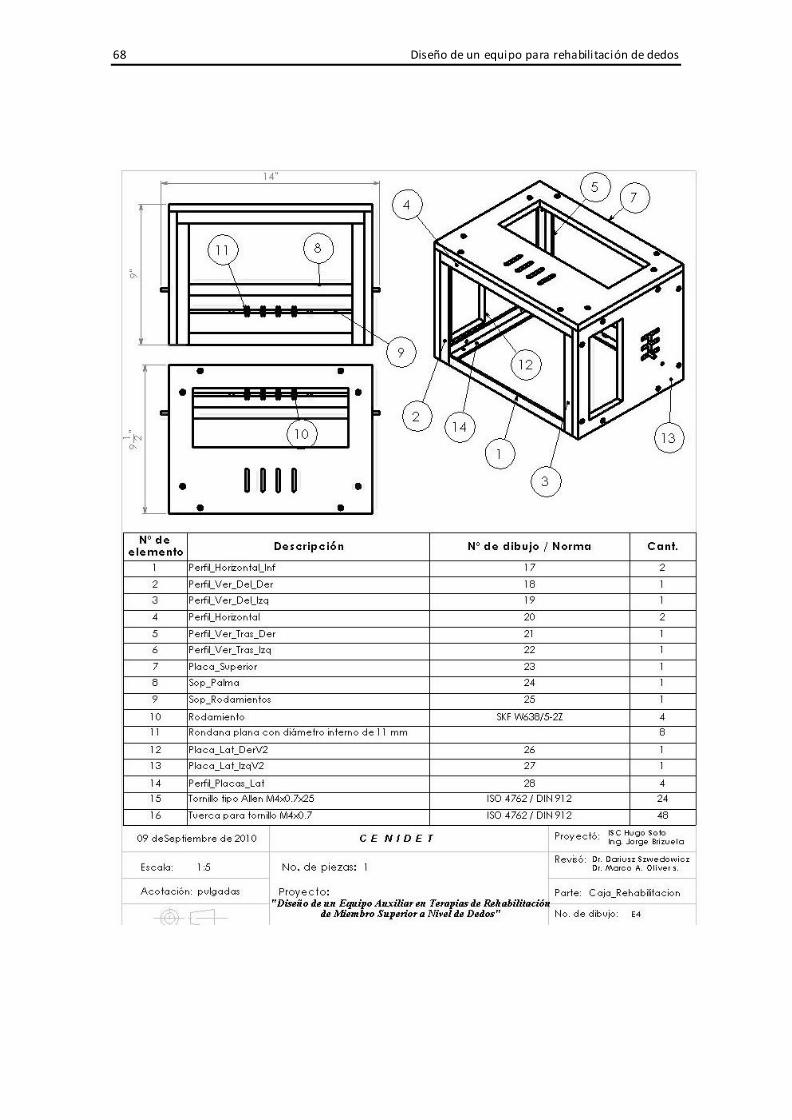
68 Diseño de un equipo para rehabilitación de dedos
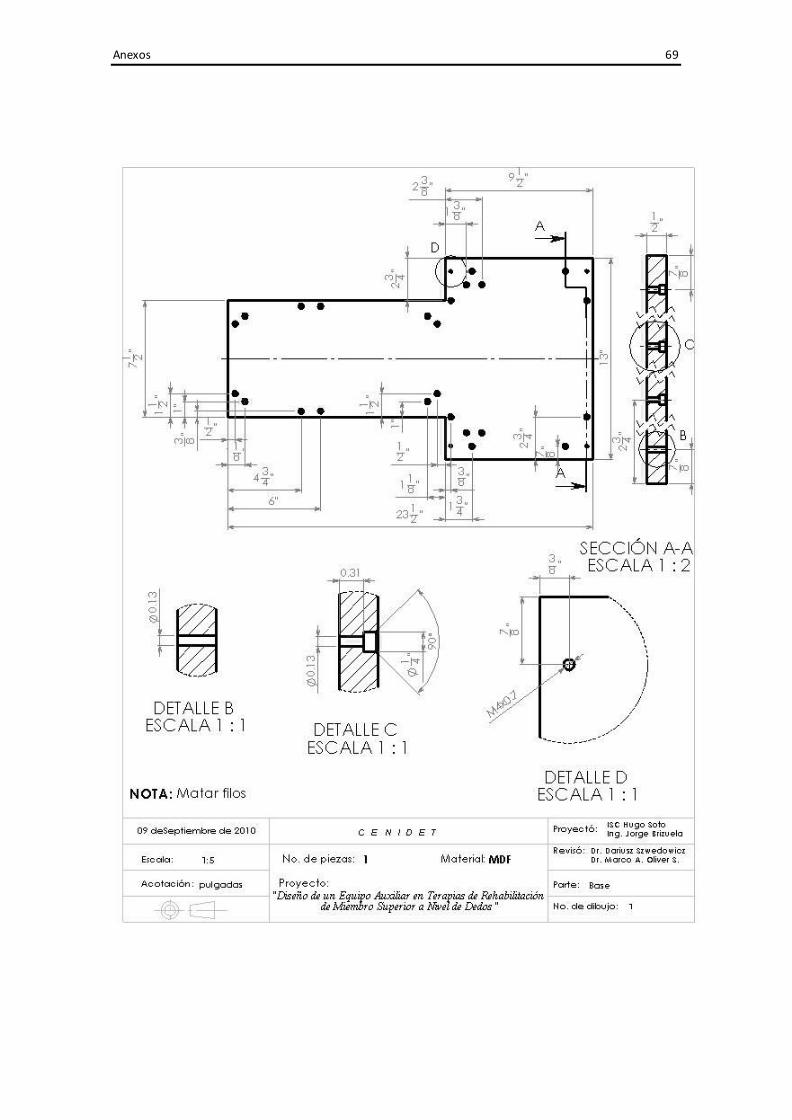
Anexos 69
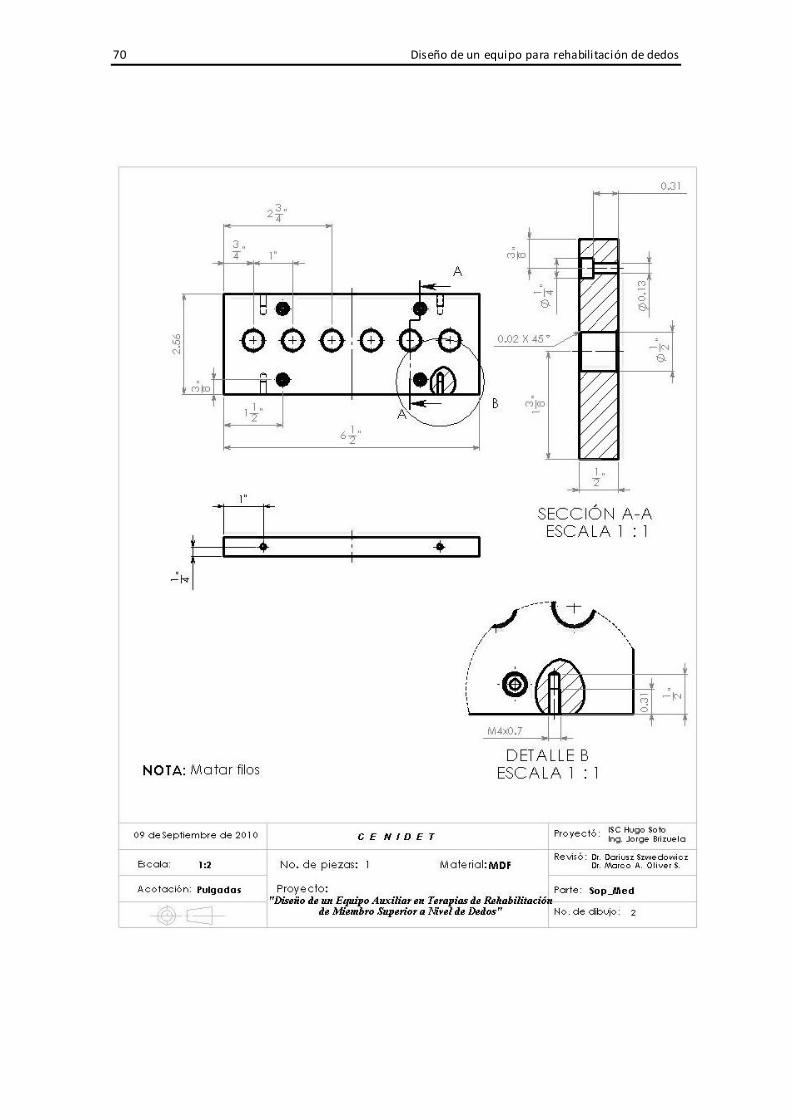
70 Diseño de un equipo para rehabilitación de dedos
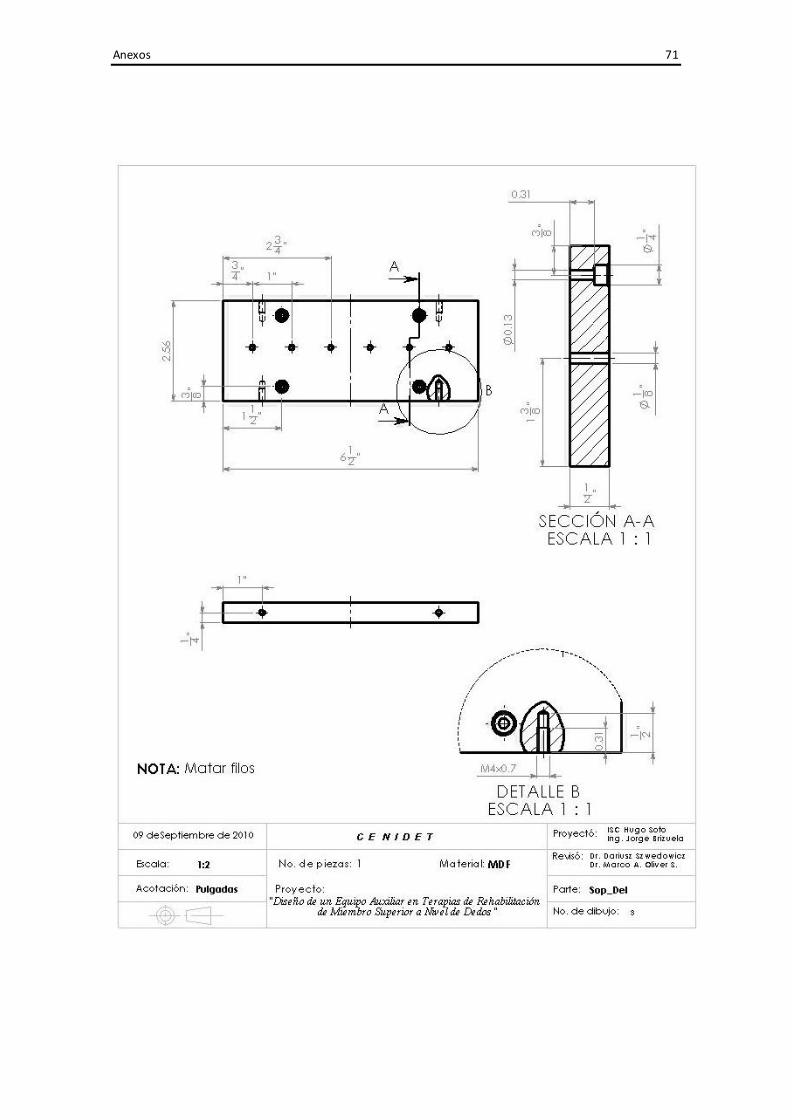
Anexos 71
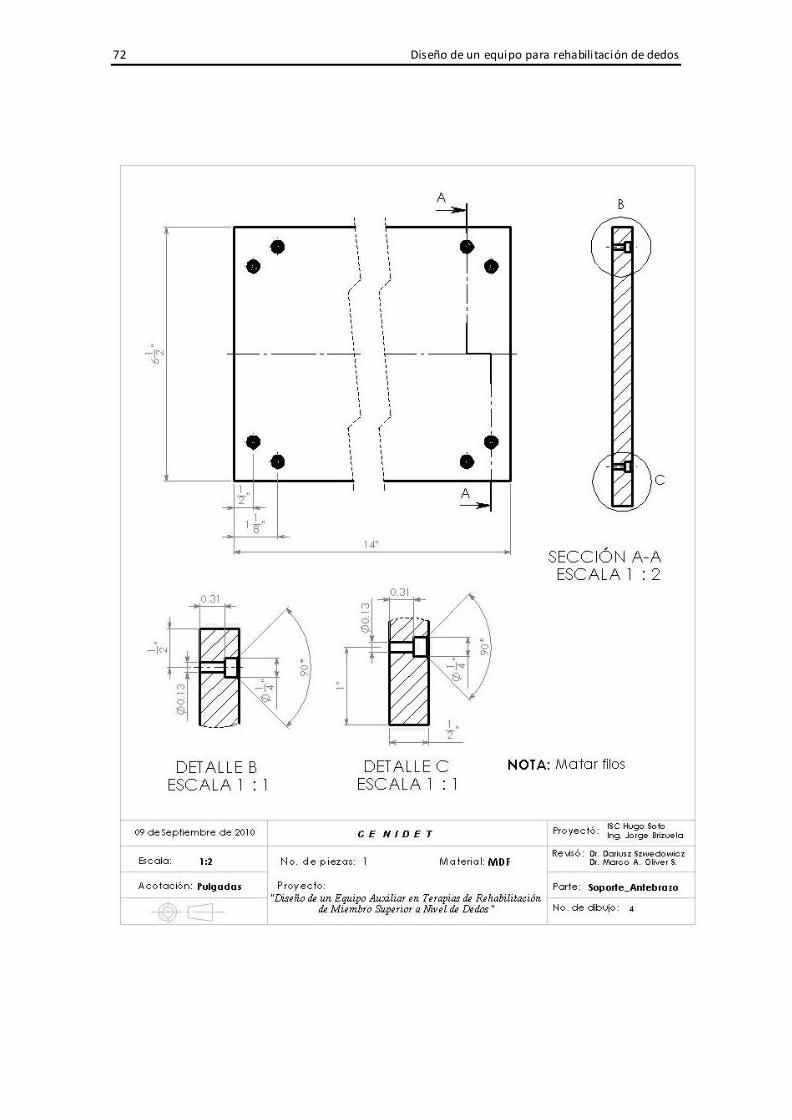
72 Diseño de un equipo para rehabilitación de dedos
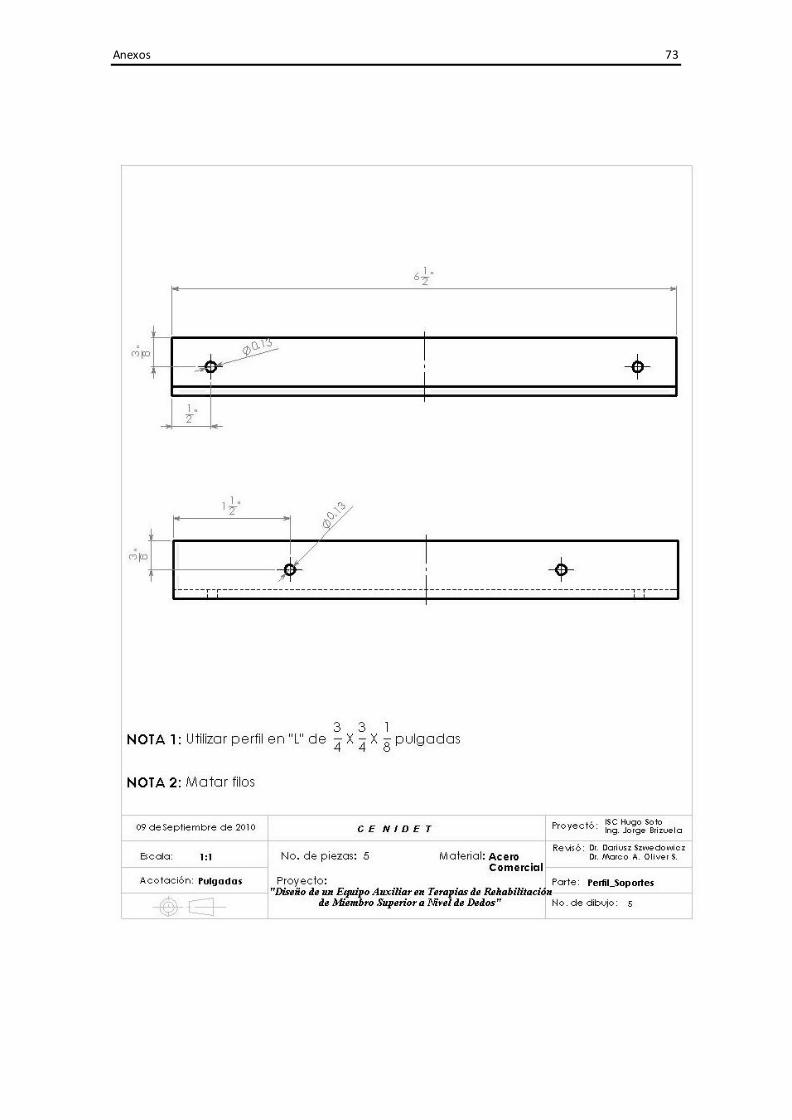
Anexos 73

74 Diseño de un equipo para rehabilitación de dedos
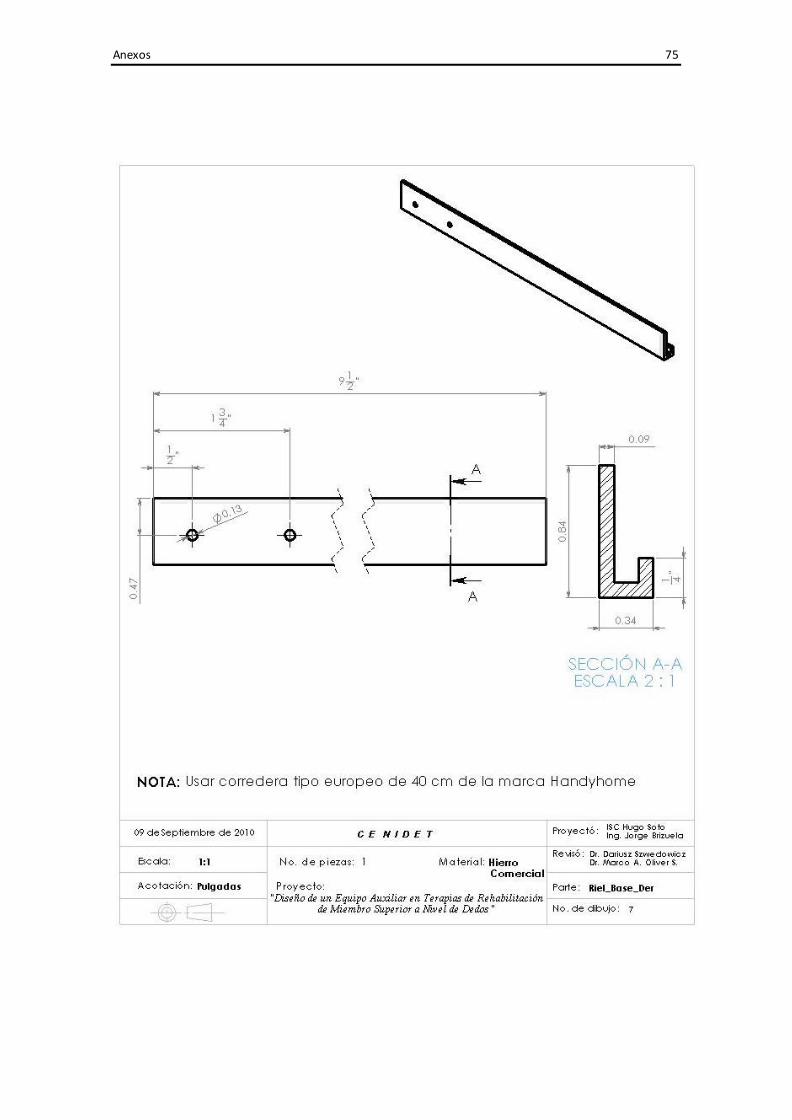
Anexos 75
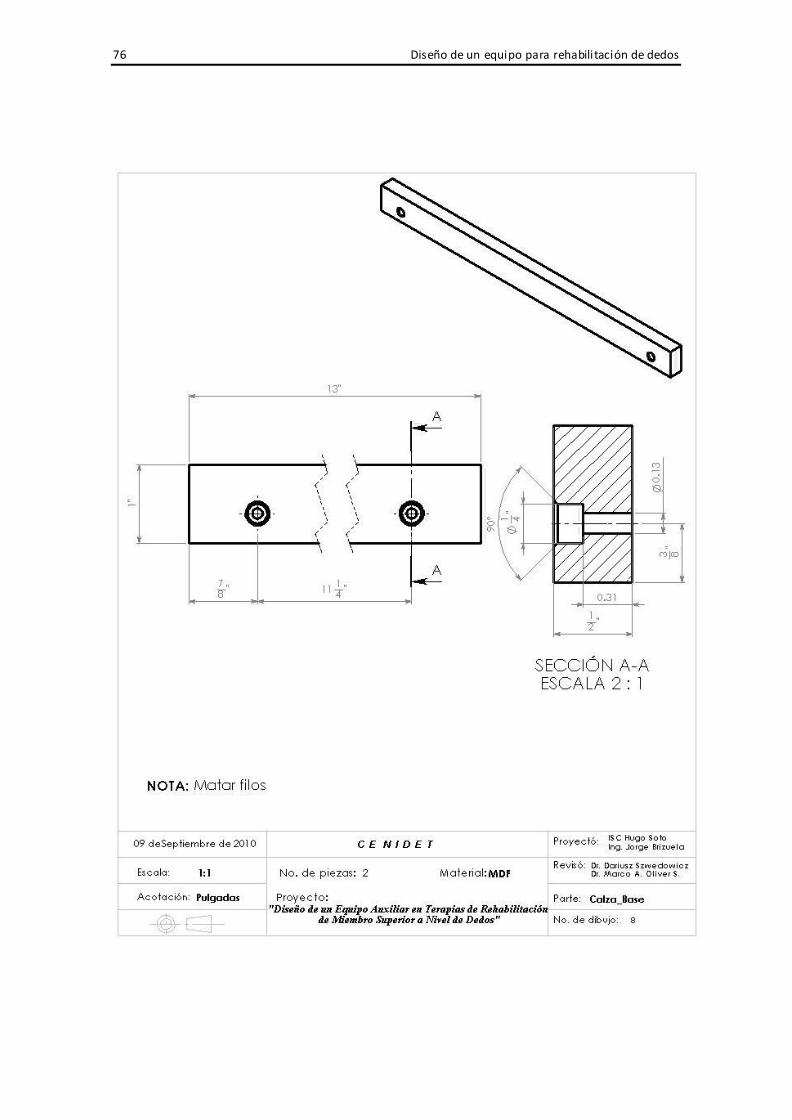
76 Diseño de un equipo para rehabilitación de dedos
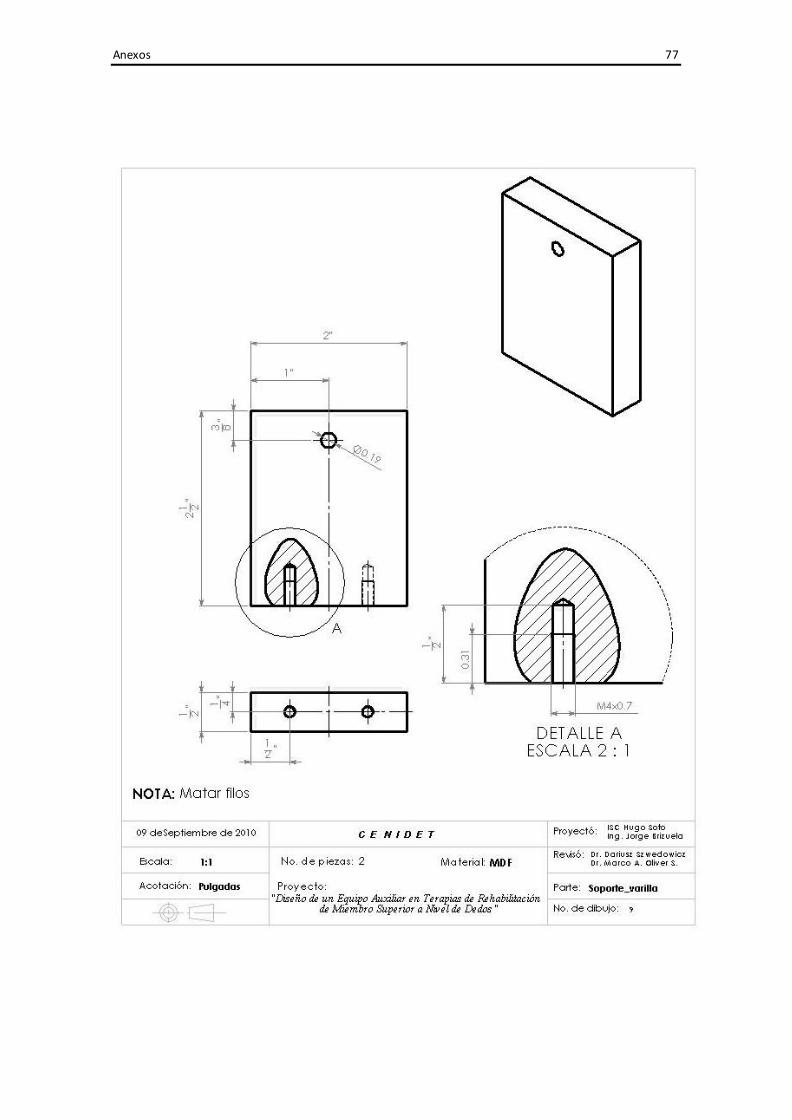
Anexos 77
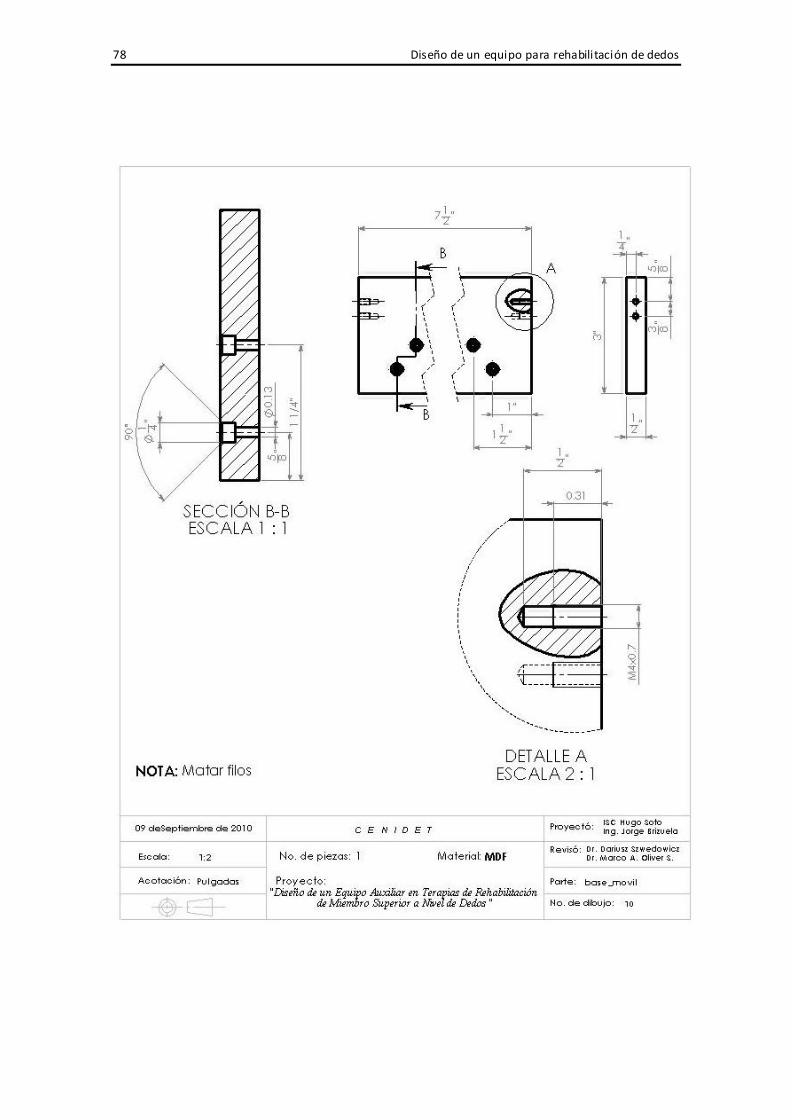
78 Diseño de un equipo para rehabilitación de dedos
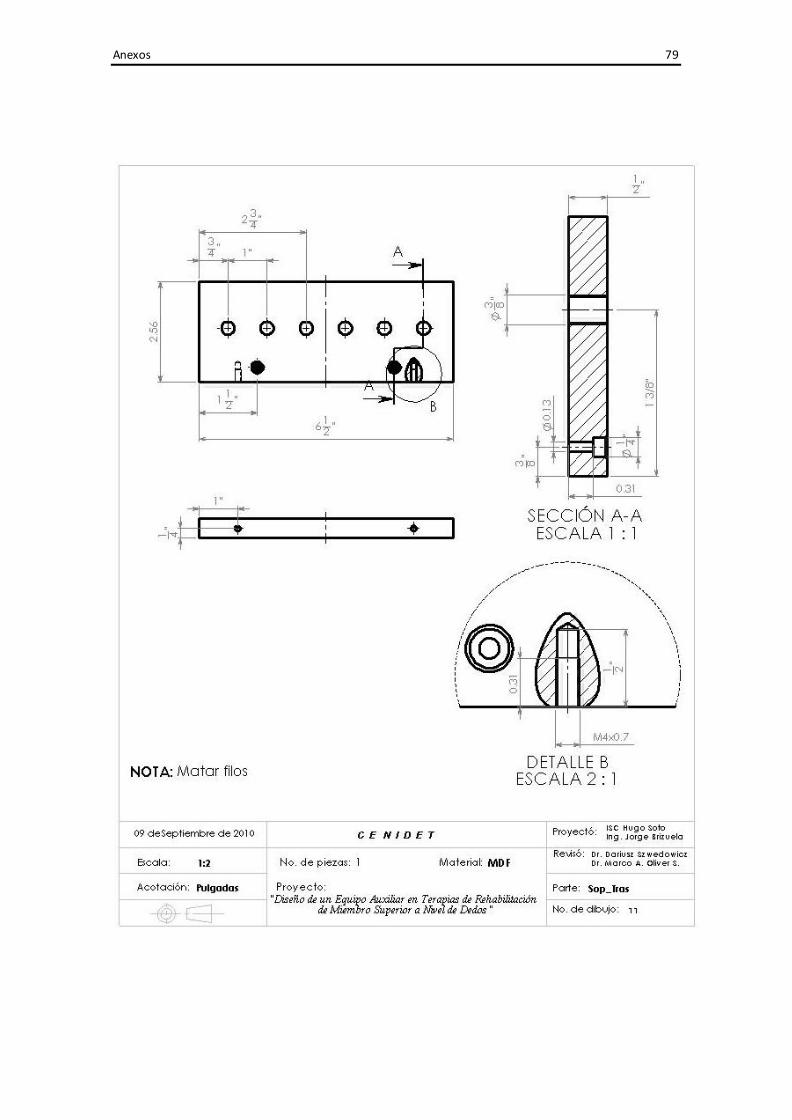
Anexos 79
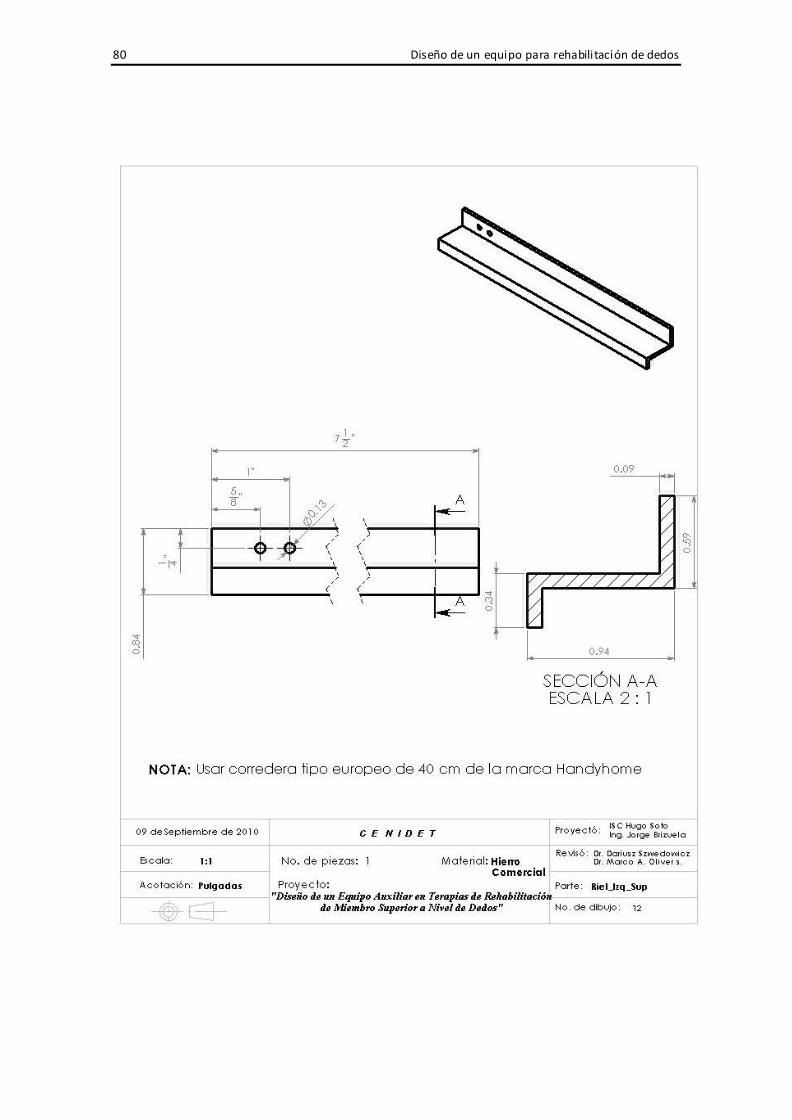
80 Diseño de un equipo para rehabilitación de dedos
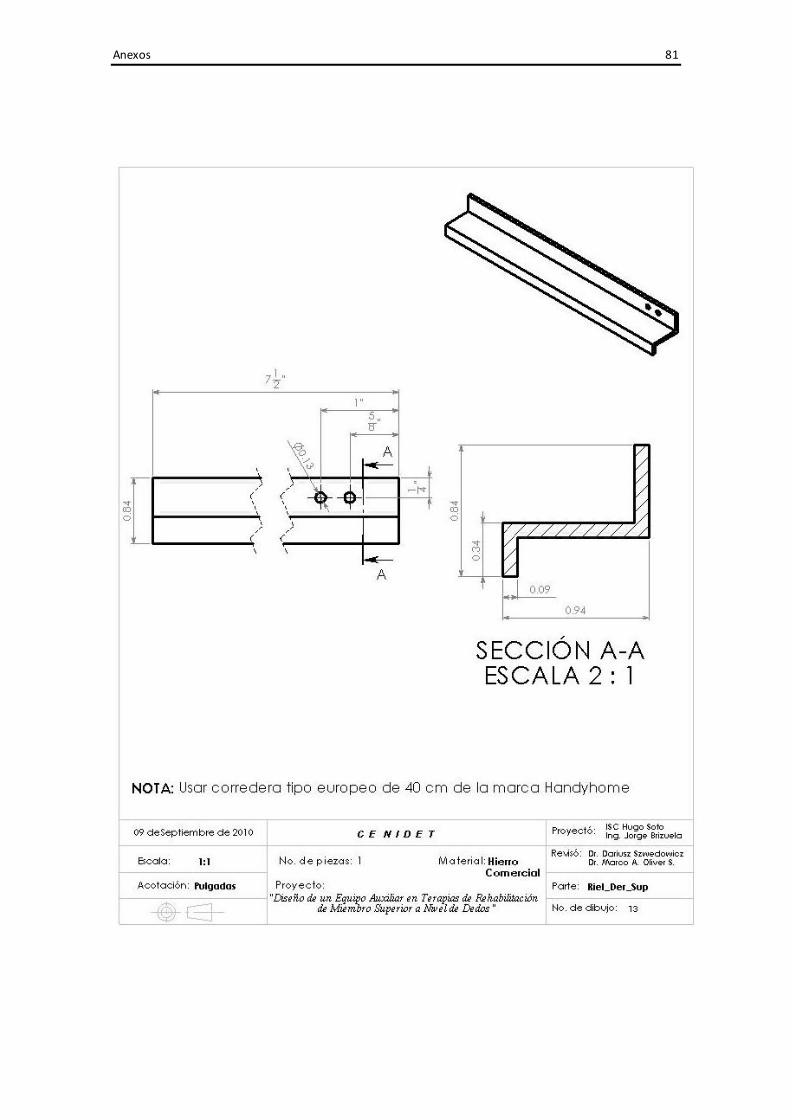
Anexos 81
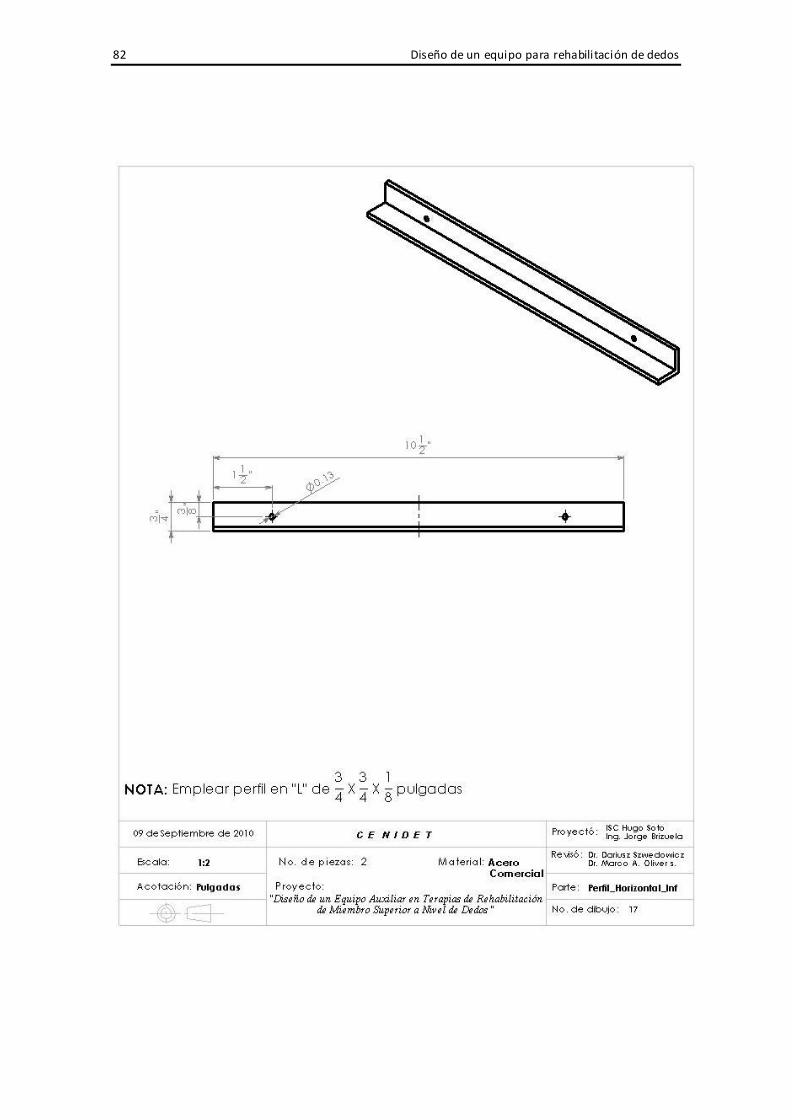
82 Diseño de un equipo para rehabilitación de dedos
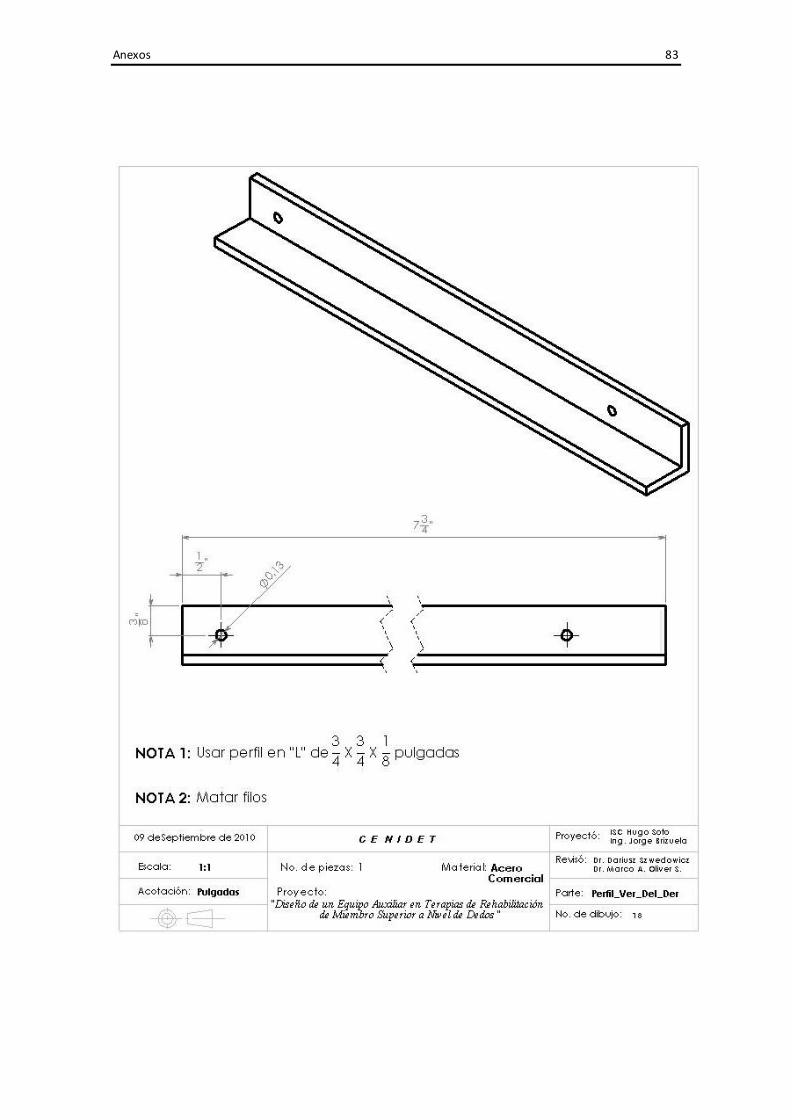
Anexos 83
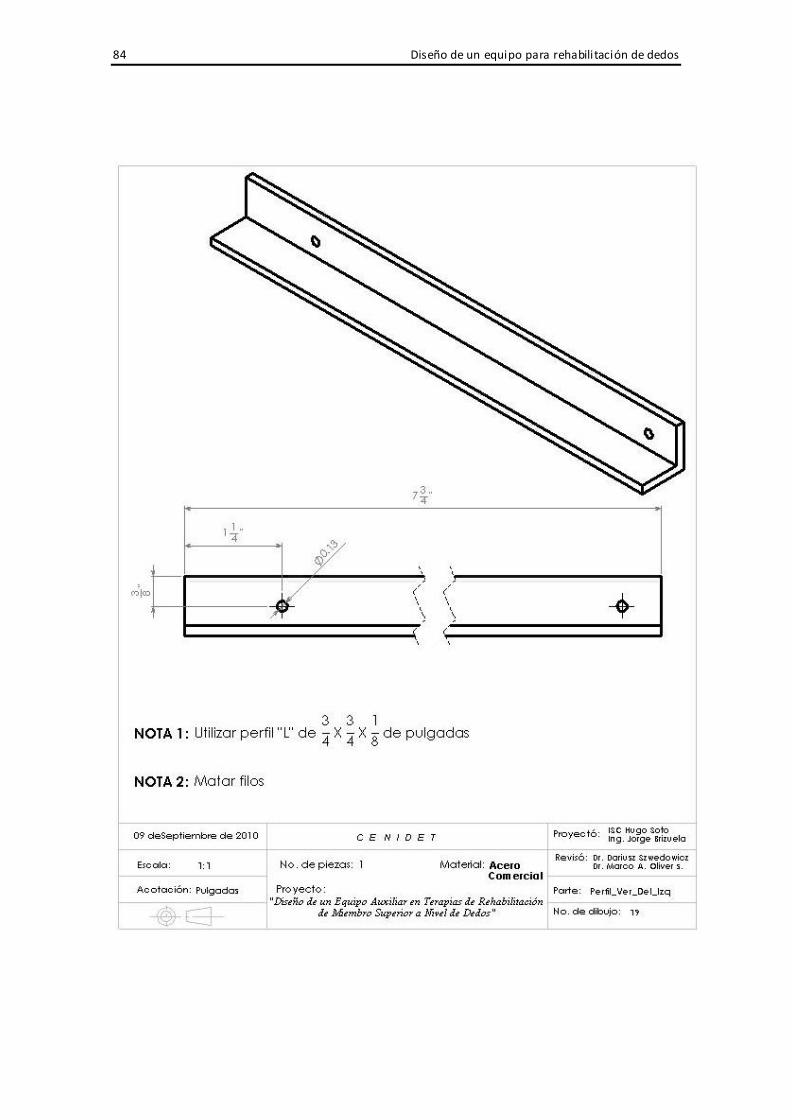
84 Diseño de un equipo para rehabilitación de dedos
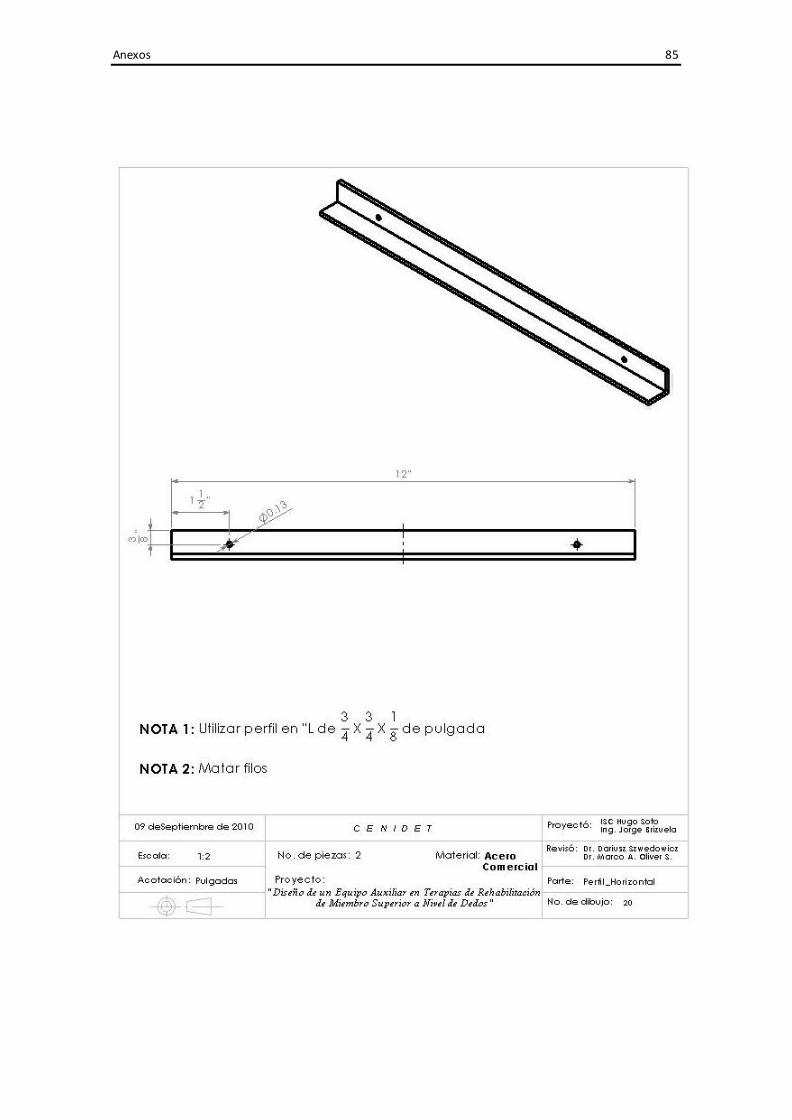
Anexos 85
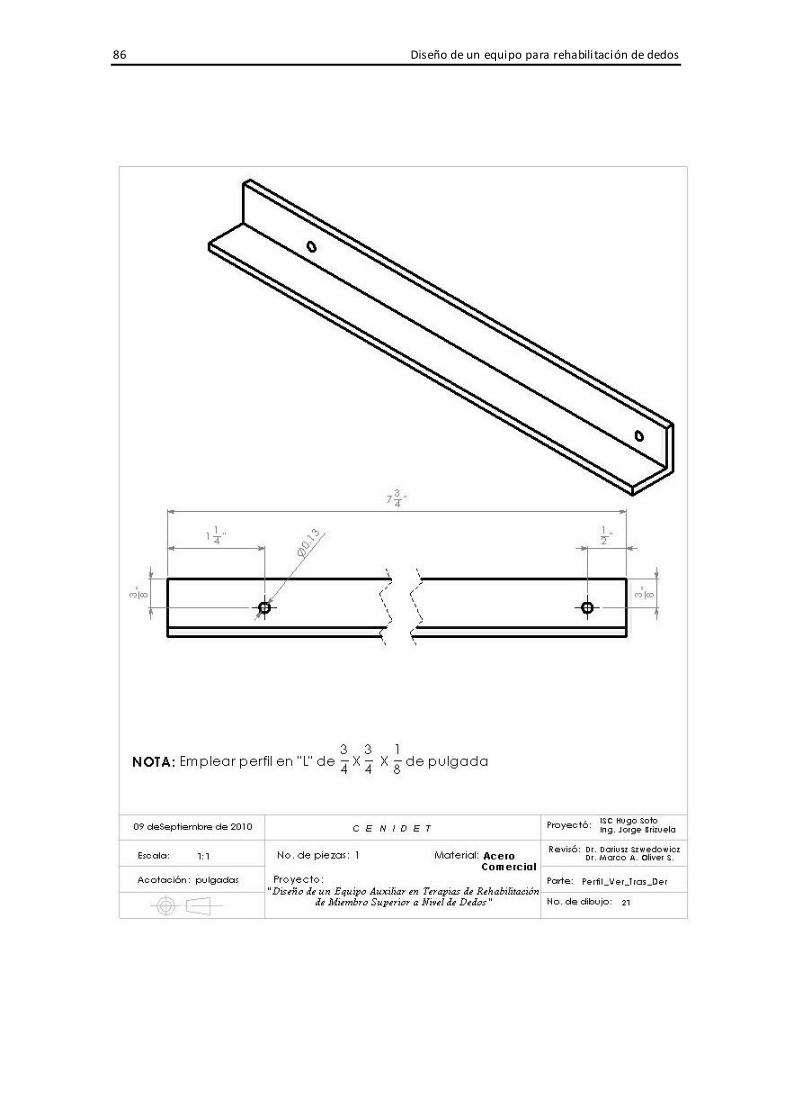
86 Diseño de un equipo para rehabilitación de dedos
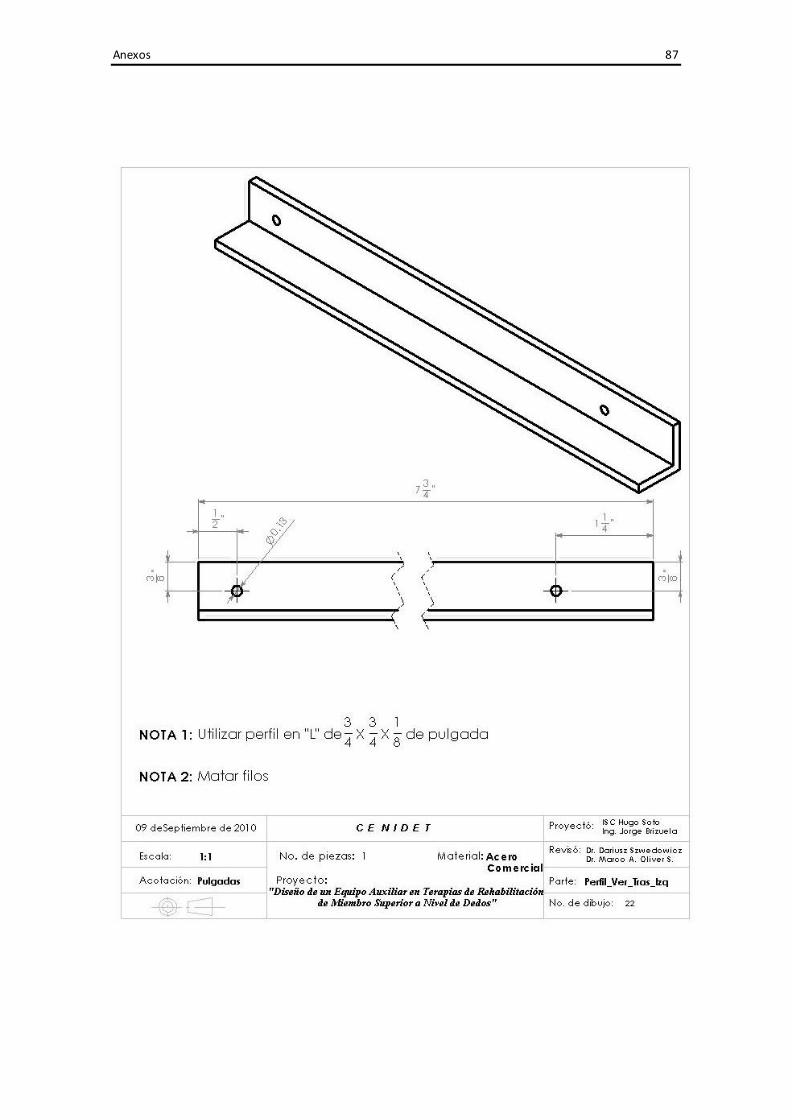
Anexos 87

88 Diseño de un equipo para rehabilitación de dedos
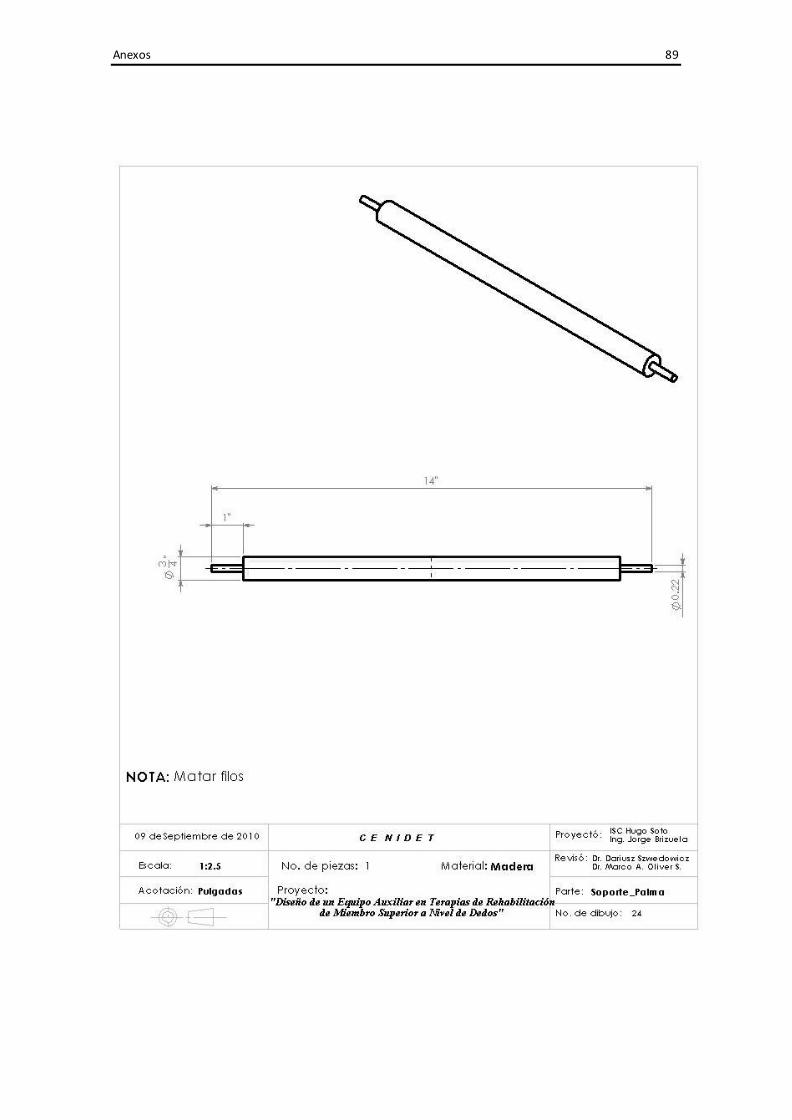
Anexos 89
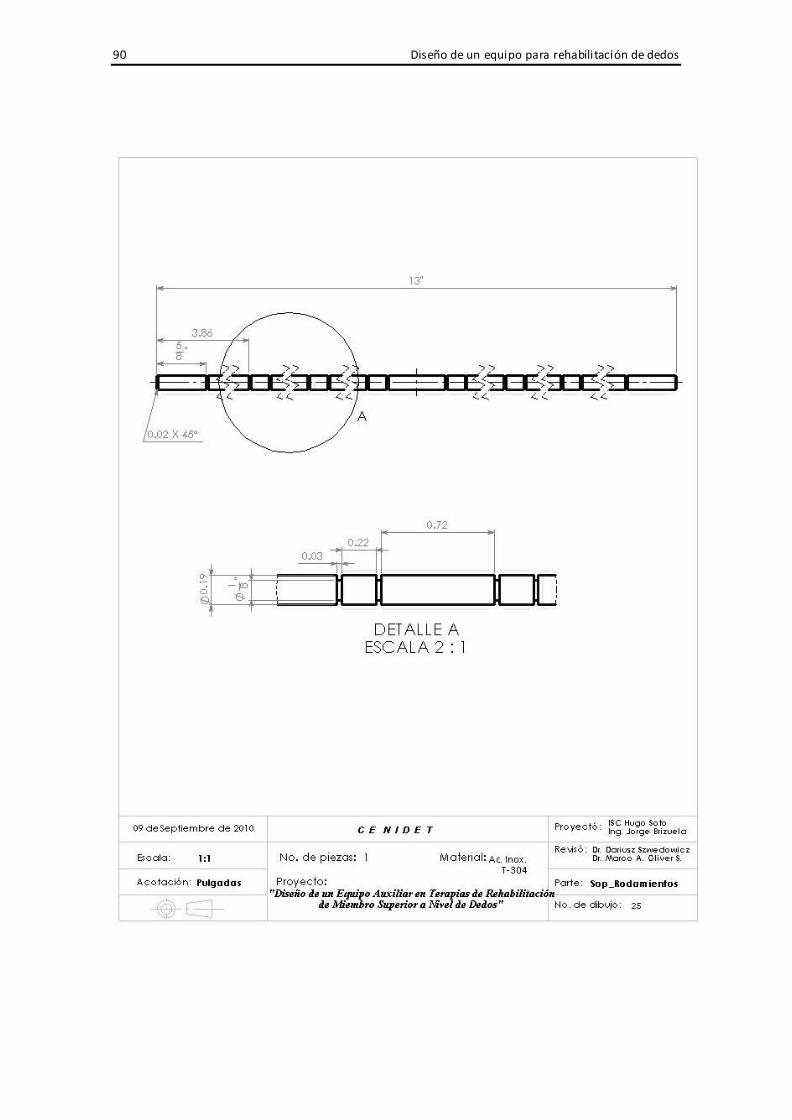
90 Diseño de un equipo para rehabilitación de dedos
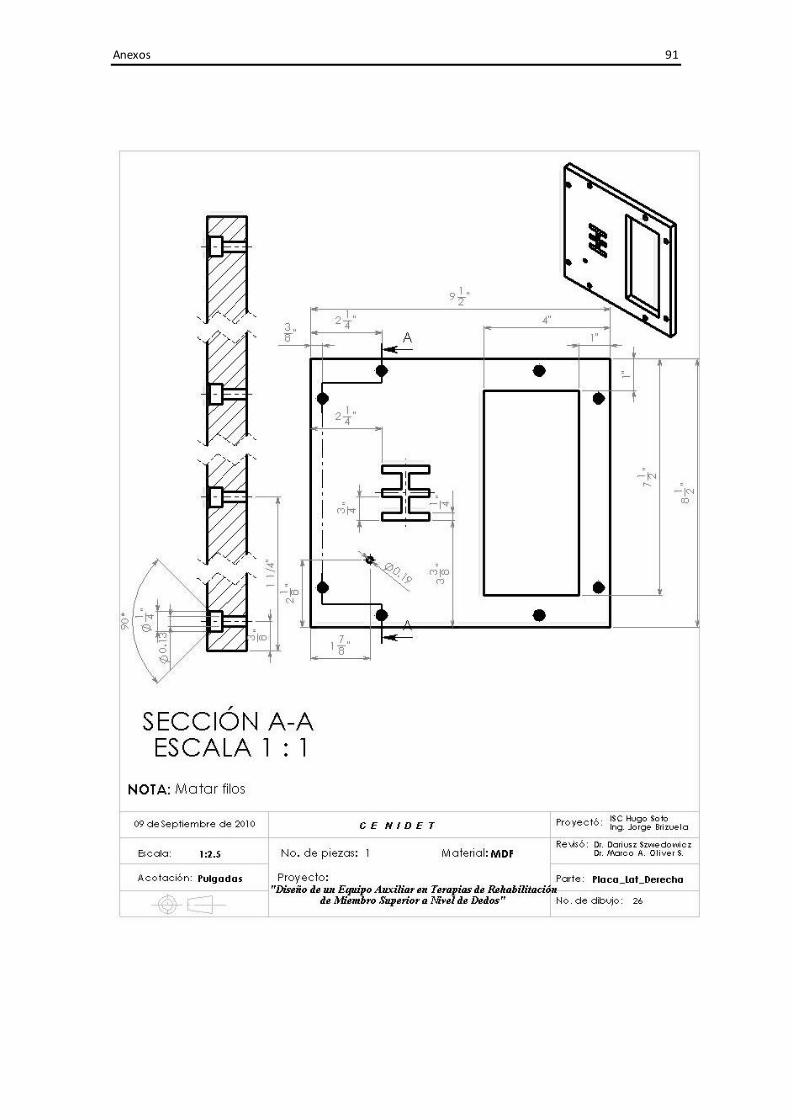
Anexos 91
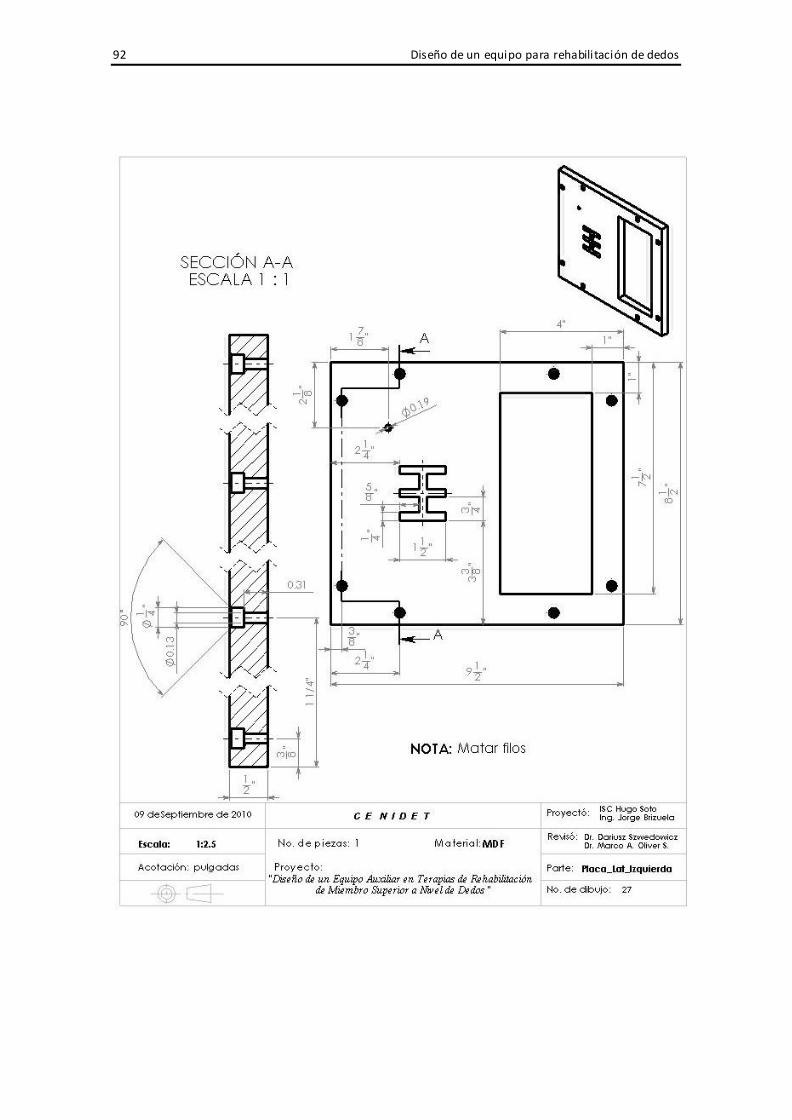
92 Diseño de un equipo para rehabilitación de dedos
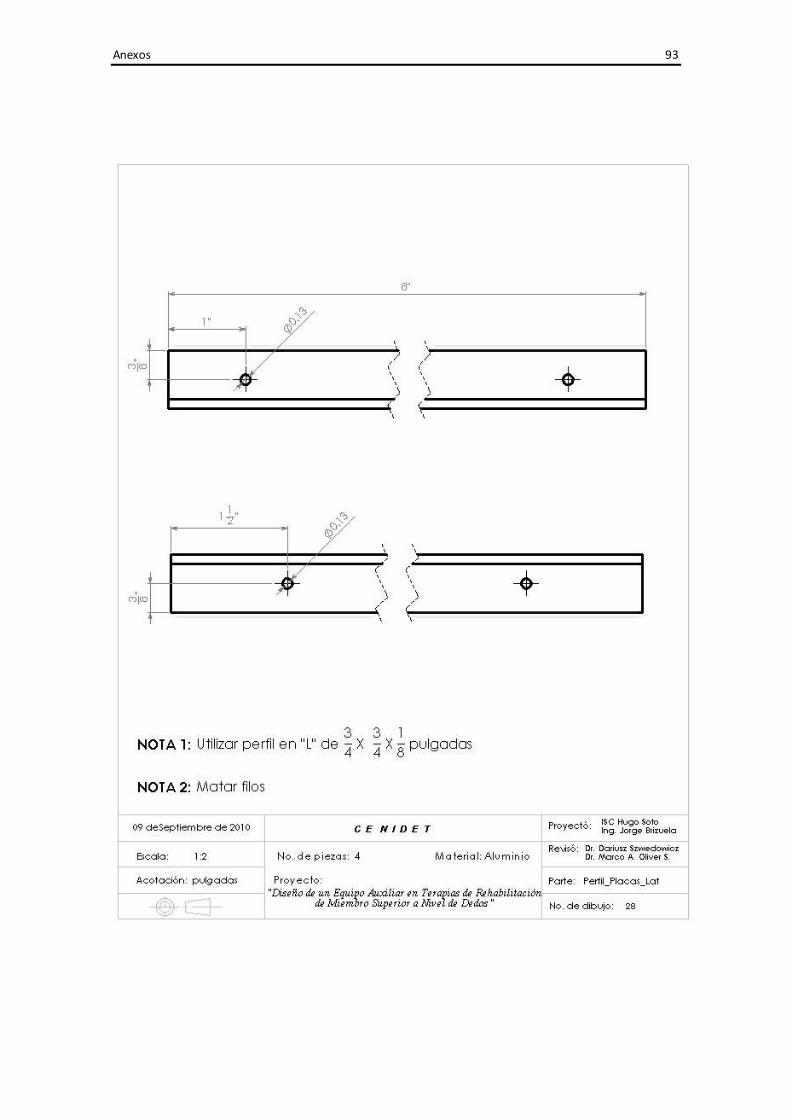
Anexos 93

94 Diseño de un equipo para rehabilitación de dedos

Anexos 95
Anexo C: Hojas de datos de los principales componentes electrónicos El presente anexo contiene las hojas de especificaciones de los componentes empleados para
la elaboración de la interfaz electrónica.
i. Microcontrolador dsPIC30F4013

96 Diseño de un equipo para rehabilitación de dedos
ii. Convertidor USB-SERIAL FTR232R
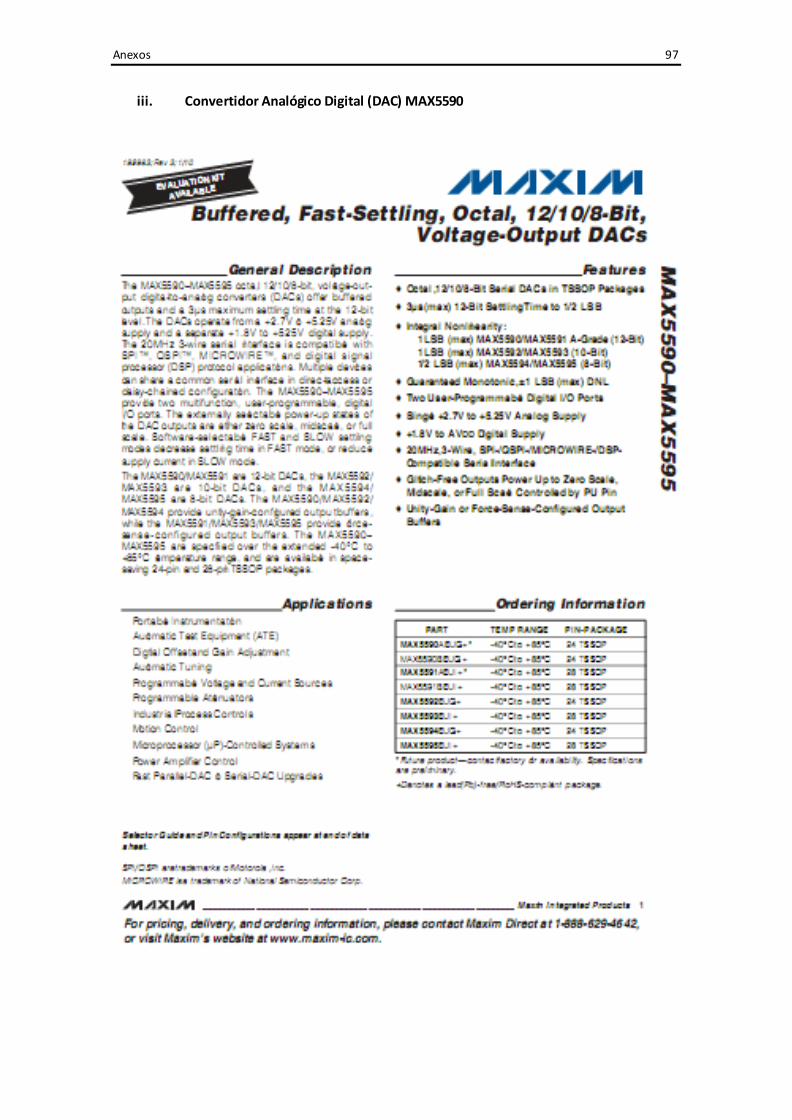
Anexos 97
iii. Convertidor Analógico Digital (DAC) MAX5590
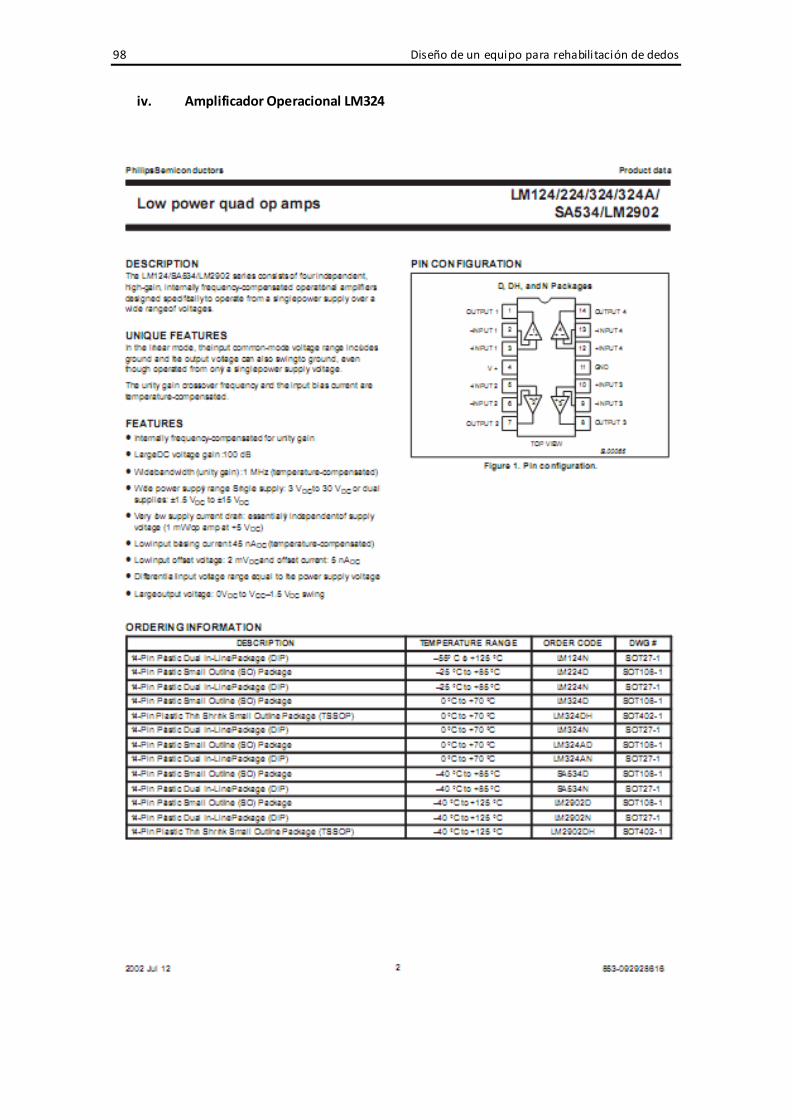
98 Diseño de un equipo para rehabilitación de dedos
iv. Amplificador Operacional LM324

Anexos 99
v. Fuente de alimentación

100 Diseño de un equipo para rehabilitación de dedos
Anexos 101
Anexo D: Firmware del microcontrolador #INCLUDE <30F4013.h> #FUSES hs3_pll8, p r_pll , nowrt, noprotect, no wdt
#USE delay (clock=32000000) #USE rs232(baud=14400, bits=8, parity=N, stop =1, uart2) #USE spi(bits=16)
//Variables globales INT nc =0x00,band=0x00,alto _act ,bajo _act ;
//Protot ipo de Funcion es VOID led( INT ,IN T ); VOID sel_op(INT ) ;
VOID calib racion(); INT lee_d ato();
VOID dac(IN T ,INT ,IN T ); VOID operacion(IN T, IN T, INT, IN T ); INT val_retraso(IN T );
INT val_incremento(INT ) ; INT tipo _delay(IN T );
VOID ini_valvs(); VOID flex ion(INT *, INT *,INT *,INT ,IN T ,IN T ,INT ,IN T ); VOID ex tension(INT *, IN T *,IN T *,IN T ,IN T ,INT ,IN T ,INT ) ;
INT d et_indice(IN T *); //Interrupcion #IN T_RDA2
VOID int_serial(){ INT d ec =0x00;
band=lee_d ato(); IF(band! =0x02){ IF( alto_act<0x10)
d ec=0x00; ELSE
IF(alto _act<0x20) d ec=0x10; ELSE
IF(al to_act<0x30) dec =0x20;
ELSE dec =0x30; PRINTF("%c %c%c ",nc,alto_act-dec ,bajo _act) ;
led(0,10); }ELSE
PRINTF("0000000000000"); }
VOID MAIN(){ INT i,cmd _char=0;
led(200,1000); DELAY_MS(200); SETUP_SP I(spi_master | spi_l_to _h );
FOR(i=0;i<2;i++) ini_valvs(); led(200,200);
FOR(;TRUE;){ cmd _char=lee_dato() ;
led(200,200); sel_op(cmd_ch ar); }
} //D esarrollo d e Funcion es
VOID led( INT d elay1, IN T delay2){ OUTPUT_LOW(pin _d1); DELAY_MS(d elay1);
OUTPUT_HIGH(pin_d1); DELAY_MS(d elay2);
OUTPUT_LOW(pin _d1); }
VOID sel_op(INT c md){ SWITCH(cmd){
CASE 0x01: PRIN TF("COMUNIC ACION COR REC TA"); BR EAK;
CASE 0x02: PRIN TF("INIC IO CAL IBRAC ION");
calibracion(); BR EAK; CASE 0x03:
PRIN TF("INIC IO OP ERACION"); led(200,200);
operacion(lee_dato(),lee_dato(),lee_dato(),lee_dato());
102 Diseño de un equipo para rehabilitación de dedos
BR EAK;
} RETURN;
} VOID calib racion(){
INT i,bajo[4],alto[4],act[4],flag,ind,alto _min ; FOR(i=0x03;i<0x43;i=i+0x10)
dac(i ,0xBE,0x01); DO{ FOR(i=0;i<4;i++){
alto[i]=lee_d ato(); bajo[i]=lee_d ato(); act[i]=lee_d ato(); }
flag=lee_d ato(); PRINTF("REC EPCION OK"); //led(0);
IF( alto[0]!=0xFF){ FO R(i=0;i<4;i++)
dac(al to[i],bajo[i],act[i]); led(200,200); }
}WHILE(flag! =0x01); IF(al to[0]!=0xFF){
ind=d et_indice( alto); IF(ind ==0) alto_min=0x03;
ELSE IF(ind==1) alto _min =0x13;
ELSE IF(ind==2)
alto _min=0x23; ELSE alto _min=0x33;
EN ABLE_IN TER RUPTS(IN T_RDA2); extension(alto,b ajo,act,alto _min,0xC8,25,1,ind);
DISABLE_IN TERRUP TS(IN T_RD A2); IF(lee_d ato()==0x02); PRIN TF("FIN D E PRUEB A");
} RETURN;
} INT lee_d ato(){
INT d ato; dato=G ETCH();
RETURN dato ; }
VOID dac(IN T alto,IN T bajo,IN T act){ OUTPUT_LOW(pin _f1);
DELAY_US(30); SPI_WRITE( alto); SPI_WRITE(b ajo);
DELAY_US(1050); OUTPUT_HIGH(pin_f1); DELAY_US(500);
OUTPUT_LOW(pin _f1); DELAY_US(30);
SPI_WRITE(0X80); SPI_WRITE( act); DELAY_US(1050);
OUTPUT_HIGH(pin_f1); DELAY_MS(10);
} VOID operacion(IN T alto _max, INT b ajo _max, IN T ret, IN T no_ciclo){
INT i,delay,ind=5,alto[4],bajo[4],ac t[4],aux1,aux2,flag=1; ini_valvs();
PRINTF("OK"); DELAY_MS(50); FOR(i=0x03;i<0x43;i=i+0x10)
dac(i ,0xBE,0x01); //lee la cad ena d e datos iniciales para los dacs
FOR(i=0;i<4;i++){ alto[i] =lee_dato() ; bajo[i] =lee_dato(); act[i] =lee_dato(); }
PRINTF("OK"); led(200,200);
IF(al to[0]!=0xFF){ ind=d et_indice( alto);
Anexos 103
delay=val_retraso(ret) ;
aux1=alto[ind]-0x01; aux2=b ajo[ind];
band =0x00; EN ABLE_IN TER RUPTS(IN T_RDA2); //Inicia operacion d e los dac's
flag=1; FOR(i=0x00;i<no _ciclo && band! =0x01;i=i+0x01){
nc =i+1 ; //Funciones para flexionar o extender flexion(alto,b ajo,act,alto _max,bajo _max,d elay,flag,ind) ;
extension(al to,bajo ,act ,aux1,0xC8,delay,flag,ind); }
DISABLE_IN TERRUP TS(IN T_RD A2); IF(b and==0x01){ PRIN TF("OPER ACION ABOR TADA");
band =lee_dato() ; ENABL E_INTERRUPTS( INT_RDA2);
extension(al to,bajo ,act ,aux1,0xC8,delay,flag,ind); DISABLE_IN TERRUPTS(INT_RDA2); lee_dato();
PRIN TF("FIN D E PRUEB A"); }ELSE{
band =lee_dato() ; IF(band==0x00){ PR INTF("FIN DE OP ERAC ION ");
in i_valvs(); } ELSE
PR INTF("FIN DE PRU EBA"); }
} ini_valvs(); RETURN;
}
INT d et_indice(IN T *altos){ INT ind; IF(al tos[0]==0x00 || altos[0]==0x30)
IF( altos[1]==0x10 || altos[1]==0x20) IF(altos[2]==0x20 || altos[2]==0x10)
ind =3; ELSE ind =2;
ELSE ind =1;
ELSE ind=0 ; RETURN ind;
}
INT val_retraso(IN T delay){ INT val ; SWITCH (delay){
CASE 0x01: val=21; BR EAK;
CASE 0x02: val=30;
BR EAK; CASE 0x03: val=25;
BR EAK; CASE 0x04:
val=20; BR EAK; DEFAULT:
BR EAK; }
RETURN val; }
VOID ini_valvs(){ INT act[8],alto[8],j ;
act[0]=0x01; act[1] =0x02; act[2]=0x04; act[3] =0x08; act[4]=0x10; ac t[5]=0x20; act[6]=0x40; ac t[7]=0x80; alto[0]=0x03; alto[1]=0x13; alto[2]=0x23; alto[3]=0x33; alto[4]=0x40; alto[5]=0x50; alto[6]=0x60; al to[7]=0x70; FOR(j=0;j<8;j++)
dac(al to[j],0x00,act[j]); }
VOID flex ion(INT *al tos,INT *b ajos,IN T *acts,IN T alto_max ,IN T bajo _max,INT vel ,INT flag,IN T ind){
104 Diseño de un equipo para rehabilitación de dedos
INT inc_bajo,j,val_max;
inc_bajo=val_incremento(vel) ; val_max=0x F0;
DO{ IF(b and != 0x01){ //Escribir al DAC
FO R(j=0;j<4 ;j++) d ac(altos[j],bajos[j],acts[j]);
led(0,2); IF(altos[ind]==alto_max && bajos[ind]==b ajo_max) flag=0;
ELSE{ IF(bajos[ind]==val_max){
IF((altos[0]>0x00 && altos[0]<0x10) || altos[0]>0x30) altos[0]=altos[0]+0x01; IF((altos[1]>0x10 && altos[1]<0x20) || (al tos[1]>0x20 && altos[1]<0x30))
altos[1]=altos[1]+0x01; IF((altos[2]>0x20 && altos[2]<0x30) || (al tos[2]>0x10 && altos[2]<0x20))
altos[2]=altos[2]+0x01; IF( altos[3]>0x30 || (altos[3]>0x10 && altos[3]<0x20)) altos[3]=altos[3]+0x01;
FOR(j=0;j<4;j++) bajos[j]=0x00;
} ELSE{ IF((altos[0]>0x00 && altos[0]<0x10) || altos[0]>0x30) bajos[0]=bajos[0]+inc_b ajo;
IF((altos[1]>0x10 && altos[1]<0x20) || (al tos[1]>0x20 && altos[1]<0x30)) bajos[1]=bajos[1]+inc_b ajo; IF((altos[2]>0x20 && altos[2]<0x30) || (al tos[2]>0x10 && altos[2]<0x20))
bajos[2]=bajos[2]+inc_b ajo; IF( altos[3]>0x30 || (altos[3]>0x10 && altos[3]<0x20))
bajos[3]=bajos[3]+inc_b ajo; } IF(tipo _delay(vel)==1)//Delay en ms
DELAY_MS(vel); ELSE//Delay en us
DELAY_US(vel); } }
alto _ac t=altos[ind]; bajo _act=bajos[ind];
}WHILE(flag==1 && band! =0x01); }
VOID ex tension(INT *altos,IN T *bajos,IN T *acts,INT alto _min,INT bajo _min ,INT vel,IN T flag,INT ind){ INT inc_bajo,j,val_max;
inc_bajo=val_incremento(vel) ; val_max=0x F0; DO{
IF(b and != 0x01){ //d ecrementar bajo o alto
IF(bajos[ind]==0x00){ IF((altos[0]>0x00 && altos[0]<0x10) || altos[0]>0x30){ altos[0]=altos[0]-0x01;
bajos[0]=val_max ; } IF((altos[1]>0x10 && altos[1]<0x20) || (altos[1]>0x20 && altos[1]<0x30)){
altos[1]=altos[1]-0x01; bajos[1]=val_max ;
} IF((altos[2]>0x20 && altos[2]<0x30) || (altos[2]>0x10 && altos[2]<0x20)){ altos[2]=altos[2]-0x01;
bajos[2]=val_max ; }
IF(al tos[3]>0x30 || (altos[3]>0x10 && al tos[3]<0x20)){ altos[3]=altos[3]-0x01; bajos[3]=val_max ;
} }EL SE{
IF((altos[0]>0x00 && altos[0]<0x10) || altos[0]>0x30) bajos[0]=bajos[0]-inc_bajo; IF((altos[1]>0x10 && altos[1]<0x20) || (altos[1]>0x20 && altos[1]<0x30))
bajos[1]=bajos[1]-inc_bajo; IF((altos[2]>0x20 && altos[2]<0x30) || (altos[2]>0x10 && altos[2]<0x20))
bajos[2]=bajos[2]-inc_bajo; IF(al tos[3]>0x30 || (altos[3]>0x10 && al tos[3]<0x20)) bajos[3]=bajos[3]-inc_bajo;
} //escribir DAC's
FO R(j=0;j<4 ;j++) d ac(altos[j],bajos[j],acts[j]);
Anexos 105
led(0,2);
IF(tipo_d elay(vel) ==1)//D elay en ms D ELAY_MS(vel) ;
ELSE//Delay en us D ELAY_US(vel) ; IF(altos[ind]==alto_min && bajos[ind]==bajo _min)
flag=0; }
alto _ac t=altos[ind]; bajo _act=bajos[ind]; }WHILE(flag==1 && band! =0x01);
RETURN; }
INT val_incremento(INT vel){ INT val ;
SWITCH (vel){ CASE 21:
val=0x05; BR EAK; CASE 30:
val=0x0A; BR EAK;
CASE 25: val=0x14; BR EAK;
CASE 20: val=0x14; BR EAK;
DEFAULT: BR EAK;
} RETURN val; }
INT tipo _delay(IN T vel){
INT val ; SWITCH (vel){ CASE 21:
val=1 ; BR EAK;
CASE 30: val=1 ; BR EAK;
CASE 25: val=1 ;
BR EAK; CASE 20: val=0 ;
BR EAK; DEFAULT:
BR EAK; } RETURN val;
}

106 Diseño de un equipo para rehabilitación de dedos
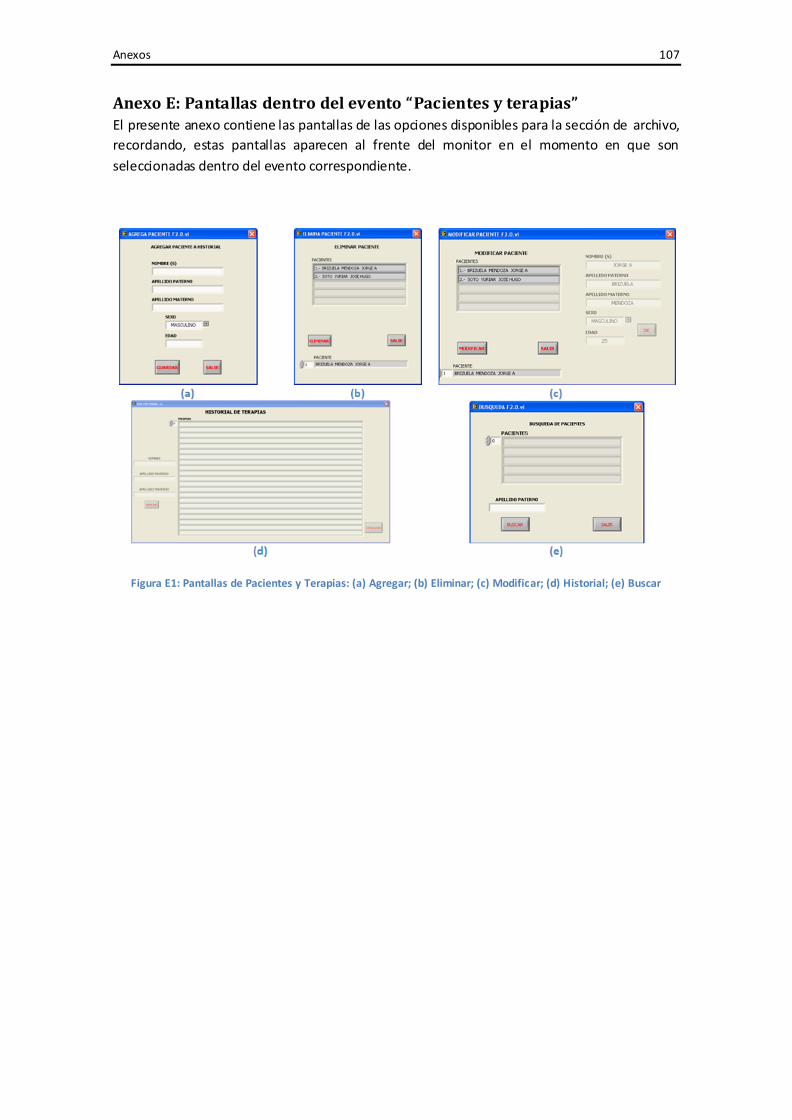
Anexos 107
Anexo E: Pantallas dentro del evento “Pacientes y terapias” El presente anexo contiene las pantallas de las opciones disponibles para la sección de archivo,
recordando, estas pantallas aparecen al frente del monitor en el momento en que son
seleccionadas dentro del evento correspondiente.
Figura E1: Pantallas de Pacientes y Terapias: (a) Agregar; (b) Eliminar; (c) Modificar; (d) Historial; (e) Buscar

108 Diseño de un equipo para rehabilitación de dedos





























