-
Robotics
Chapter 1 (Part A): Robot Anatomy
ETME -404
-
Overview
Robot anatomy
kinematic chain
Links
Joints
Degree of Freedom(DOF)
Joint Notation Scheme
Arm Configuration
Wrist Configuration
Work Volume
The End-effector
-
Robot anatomy Robot anatomy is the study of skeleton of robot
that is
the physical construction of the manipulator .
The mechanical structure consists of rigid body(links)connected
by means of joints.
Main parts of structure1. Arm ensure mobility and reach ability
i.e forpositioning the EE.
2. Wrist for orientation of the EE
3. End effector (EE)for performing tasks eg holding,lifting
etc.
-
Robot anatomy
4. Base ( generally fastened to the floor)
-
Robot anatomy
Robot Manipulators are composed of links connected by joints to
form a kinematic chain
Open kinematic chain
Closed kinematic chain
-
Robot anatomy
Links (Assumed to be rigid)
Binary link(connected with at most another 2 links)
Tertiary link(connected with at most 3 links)
-
Robot anatomy
Joints:
Two basic types of joints that are commonly used inindustrial
robots are:
1. Linear joint
2. Rotating joint
Linear joints involve a sliding or translational motionof the
connecting links.
(achieved in no. of ways for eg rack and pinion, bypiston, screw
and nut or mechanism etc.
-
Robot anatomy
-
Robot anatomy
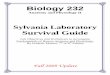
Rotating joint
3 types of rotating joint
I. Rotational (R) joint: the axis of the rotation
isperpendicular to the axes of the two connectinglinks.
II. Twisting (T) joint : the axis of the rotation isparallel to
the axes of the two connecting links.
III. Revolving (V) joint: in which input link is parallelto the
axis of rotation and o/p link isperpendicular to the axis of
rotation.
-
Robot anatomy
-
Degree of Freedom(DOF)
Degree of Freedom(DOF)
The number of independent variables required to specify the
location and orientation of EE in 3D space.
A rigid link in space has ..dof
A rigid link in plane has .. dof
-
Degree of Freedom(DOF)
In open kinematic chain: the DOF is equal to the numbers oflinks
or number of joints.(it is assumed that each joint hasonly 1
DOF)
-
Degree of Freedom(DOF)
Required DOF in a Manipulator
In order to position and orient a body freely in 3D space,
amanipulator should have at least 6DOF such a manipulator iscalled
Spatial manipulator.
A manipulator with less than 6 DOF has constrained motion in3D
space. There are many industrial manipulators that have 5or less
DOF
Spatial manipulator with more than 6DOF have surplus jointsand
are known as redundant manipulators.
-
Degree of Freedom(DOF)
The extra DOF may enhance the performance by adding to its
dexterity/flexibility.
-
Joint Notation Scheme
Uses the joint symbols (L or P, R, T, V) to designate joint
typesused to construct robot manipulator
Separates body-and-arm assembly from wrist assembly usinga colon
(:) .Example: TLR : TR
Notation = RR
-
Arm Configuration
The purpose of the arm is to position the wrist in the
3Dspace.
According to joint movements and arrangement of links,
fourwell-distinguished basic structural configurations are
possiblefor the arm.
named according to the coordinate system employed or theshape of
the space they sweep.
-
Arm Configuration
The four basic configurations are:
(i) Cartesian (rectangular) configuration
(ii) Cylindrical configuration
(iii) Polar (spherical) configuration
(iv) Articulated (Revolute or Jointed-arm configuration)
-
Arm Configuration
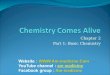
This is the simplestconfiguration with all threeprismatic
joints
The endpoint of the arm iscapable of operating in acuboidal
space, calledworkspace.
The workspace representsthe portion of space aroundthe base of
the manipulatorthat can be accessed by thearm endpoint
A 3-DoF cantilever type Cartesian arm configuration and its
workspace
(i) Cartesian(rectangular) configuration
-
Arm Configuration
The volume of the space swept is called work volume; the surface
of the workspace describes the work envelope
Notation LLL or PPP
Gantry or box Cartesian
Gantry configuration is used when heavy loads must be precisely
moved. The Cartesian configuration gives large work volume but has
a low dexterity.
Notation LLL and High rigidity
(i) Cartesian(rectangular) configuration
-
Arm Configuration(ii) Cylindrical Configuration
Uses two perpendicular prismaticjoints, and a twisting joint
Notation TLL
The cylindrical configuration offers goodmechanical stiffness
and the wristpositioning accuracy decreases as thehorizontal stroke
increases.
It is suitable to access narrowhorizontal cavities and, hence,
is usefulfor machine-loading operations.
-
Arm Configuration
It consists of a telescopic link(prismatic joint) that can
beraised or lowered about ahorizontal rotary joint.
These two links are mounted ona rotating base.
Notation TRP or TRL
gives the capability of movingthe arm end-point within apartial
spherical shell space aswork volume
(iii)Polar (Spherical) Configuration
-
Arm Configuration
This configuration allows manipulationof objects on the floor
because itsshoulder joint allows its end-effector togo below the
base.
Its mechanical stiffness is lower thanCartesian and cylindrical
configurations
the wrist positioning accuracy decreaseswith the increasing
radial stroke.
The construction is more complex. Polararms are mainly employed
for industrialapplications such as machining, spraypainting and so
on.
(iii)Polar (Spherical) Configuration
-
Arm Configuration
Its configuration is similar to that of humanarm
It consists of two straight links,corresponding to the human
"forearm"and "upper arm" with two rotary jointscorresponding to the
"elbow" and"shoulder" joints.
Notation TRR
The work volume of this configuration isspherical shaped, and
with proper sizing oflinks and design of joints, the armendpoint
can sweep a full spherical space
Ability to extend its arm beyond its base
(iv) Articulated (Revolute or Jointed-arm) Configuration
-
Arm Configuration
characteristics of articulated andcylindrical configurations are
combined
The result is SCARA(SelectiveCompliance Assembly Robot Arm)
Notation VRP
The SCARA configuration has verticalmajor axis rotations such
thatgravitational load, Coriolis, andcentrifugal forces do not
stress thestructure as much as they would if theaxes were
horizontal.
(v) Other Configurations
-
Arm Configuration
This advantage is very important at high speeds and
highprecision.
This configuration provides high stiffness to the arm in
thevertical direction, and high compliance in the horizontalplane,
thus making SCARA ideal for many assembly tasks.
-
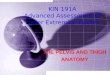
Wrist Configuration
Wrist assembly is attached to end-of-arm
End effector is attached to wrist assembly
Function of wrist assembly is to orient end effector
properlywith respect to the task to be performed.
Two or three degrees of freedom:
Roll
Pitch
Yaw
-
Wrist Configuration
Notation :RRT
-
Wrist Configuration
-
Work Volume
-
Work Volume
-
Work Volume
The work volume is determined by the following :
1. The robots physical configuration.
2. The size of the body , arm and wrist components.
3. The limits of joint movement.
-
The End-effector
The special tooling for a robot that enables it to perform
aspecific task
The end-effector is external to the manipulator and its DOF
donot combine with the manipulator's DOF.
Different end-effectors can be attached to the end of the
wristaccording to the task to be executed.
These can be grouped into two major categories:
1. Grippers 2. Tools
-
The End-effector
Two types:
Grippers to grasp and manipulate objects (e.g., parts)
duringwork cycle
Tools to perform a process, e.g., spot welding, spray
painting
-
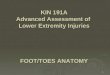
The End-effector
A two-finger mechanical gripper for grasping rotational
parts
-
Thank You