Embed Size (px)
DESCRIPTION
Signals and systems
Citation preview

Signals and Systems
Basic Signals and Systems
Vijaya Krishna A
Vijaya Krishna A EC-253: Signals and Systems

Signals
Definition
A signal is a function of one or more independent variables.
Signals represent information.
A continuous signal is a function of one or more continuousvariables.
A discrete signal/sequence is a function of one or morediscrete variables.
In this course, we deal with functions of a single variable.
A continuous signal is typically taken to be a function of time.
Notation:
Continuous signal: x(t)Discrete signal: x [n]
x [n] is undefined for non-integer values of n.
n is unitless.
Vijaya Krishna A EC-253: Signals and Systems

Signal Classification
Real/complex
Deterministic/random:
A deterministic signal is completely specified for all−∞ < t <∞ (−∞ < n <∞).A random signal is one that takes random values at any t (n).It is a signal about which there is uncertainty before its actualoccurrence.
Periodic/Aperiodic
Even/odd
Energy/power
Vijaya Krishna A EC-253: Signals and Systems

Energy/Power
The energy of a signal x(t) is given by
E =
∫ ∞−∞|x(t)|2dt
Similarly
E =∞∑
n=−∞|x [n]|2
The power of a signal x(t) is given by
P = limT→∞
1
2T
∫ T
−T|x(t)|2dt
Similarly
P = limN→∞
1
2N + 1
N∑n=−N
|x [n]|2
Vijaya Krishna A EC-253: Signals and Systems

Energy/Power
A signal is called an energy signal iff 0 < E <∞. In this case,P = 0.
A signal is called a power signal iff 0 < P <∞. In this case,E =∞.
For a periodic power signal with fundamental period T , wehave
P =1
T
∫ T
0|x(t)|2dt
If P =∞, then the signal is neither an energy signal nor apower signal.
Example: x(t) = t
Find the power/energy of the following:1 x(t) = e−atu(t), a > 0.2 x [n] = u[n]
Vijaya Krishna A EC-253: Signals and Systems

Transformations of the Independent Variable
Shifting:
y(t) = x(t − t0): Shift x(t) to the right by t0 units.y(t) = x(t + t0): Shift x(t) to the left by t0 units.Similarly for x [n − n0] and x [n + n0].
Scaling: y(t) = x(at), where a is a non-zero real number.
|a| < 1: The signal is expanded.|a| > 1: The signal is compressed.
Reflection: y(t) = x(−t)
The signal is reflected about t = 0.Same as scaling with a = −1.
To find y(t) = x(at + b),
first shift by b,and then scale by a.
Vijaya Krishna A EC-253: Signals and Systems

Periodic Signals
A continuous signal x(t) is said to be periodic if there exists apositive T such that
x(t) = x(t + T )
for all t.
The fundamental period T0 of x(t) is the smallest value of Tfor which the above equation holds.
If x(t) is a constant signal, its period is undefined.
A discrete signal x [n] is said to be periodic if there exists apositive N such that
x [n] = x [n + N]
for all n.
The fundamental period N0 is defined similarly.
Vijaya Krishna A EC-253: Signals and Systems

Even and Odd Symmetry
A continuous signal x(t) is said to be even if
x(−t) = x(t)
A continuous signal x(t) is said to be odd if
x(−t) = −x(t)
The definitions are similar for discrete signals.
Properties:
If x(t) is odd, then x(0) = 0.If x(t) is even, then
∫ a
−ax(t)dt = 2
∫ a
0x(t)dt
If x(t) is odd, then∫ a
−ax(t)dt = 0
even × even = even.even × odd = odd.odd × odd = even.
Vijaya Krishna A EC-253: Signals and Systems

Even-Odd Decomposition
Any arbitrary signal x(t) can be expressed uniquely as
x(t) = xe(t) + xo(t)
where the even part xe(t) and the odd part xo(t) are given by
xe(t) =1
2[x(t) + x(−t)]
xo(t) =1
2[x(t)− x(−t)]
Find the even and odd parts of x(t) = e−tu(t)
Vijaya Krishna A EC-253: Signals and Systems

Unit Step and Unit Impulse
The discrete unit step is given by
u[n] =
{1 n≥0
0 n < 0
The discrete unit impulse is given by
δ[n] =
{1 n = 0
0 n 6=0
Properties:
δ[n] = u[n]− u[n − 1]
u[n] =∑∞
k=0 δ[n − k]
u[n] =∑n
k=−∞ δ[k]
x [n]δ[n − n0] = x [n0]δ[n − n0]: δ[n] is a sampling function.
x [n] =∑∞
k=−∞ x [k]δ[n − k]
Vijaya Krishna A EC-253: Signals and Systems

The Continuous case
The unit step function is given by
u(t) =
{1 t > 0
0 t < 0
u(t) has a discontinuity at t = 0.The unit impulse (Dirac impulse) is a generalized functionLet
δε(t) =
{1ε 0 < t < ε
0 otherwise
The unit impulse is defined as
δ(t) = limε→0
δε(t)
Vijaya Krishna A EC-253: Signals and Systems

Unit Impulse
δ(t) is a signal for which
δ(t) = 0 for t 6= 0
∫ ∞−∞
δ(t)dt = 1
Properties:
u(t) =
∫ t
−∞δ(τ)dτ or, u(t) =
∫ ∞0
δ(t − τ)dτ
x(t)δ(t − t0) = x(t0)δ(t − t0) : δ(t) is a sampling function.∫∞−∞ x(t)δ(t − t0)dt = x(t0)
x(t) =∫∞−∞ x(τ)δ(t − τ)dτ
Vijaya Krishna A EC-253: Signals and Systems

Continuous Sinusoids
Considerx(t) = A cos(ω0t + φ)
where
A is the amplitude
ω0 is the fundamental frequency in radians/sec
ω0 = 2πf0, where f0 is the fundamental frequency incycles/sec or Hz
T0 = 2π|ω0| is the fundamental period
φ is the phase shift in radians
x(t) is periodic for any choice of ω0.
Sinusoids with different fundamental frequencies are distinct.
Let x0(t) = A cos(ω0t + φ0). x1(t) = A cos(ω1t + φ1) iscalled a harmonic of x0(t) if ω1 = kω0 for some integer k .
Vijaya Krishna A EC-253: Signals and Systems

Exponentials
A real exponential is of the form
x(t) = Ceat
where C and a are real numbers.
When a is imaginary (and C = 1), we have x(t) = e jω0t
By Euler’s relation, we have
e jω0t = cosω0t + j sinω0t
e jω0t is periodic with a fundamental period of T0 = 2π|ω0| .
The definition of harmonics is similar.
A general complex exponential has growing/decaying sinusoidsas its real and imaginary parts.
Vijaya Krishna A EC-253: Signals and Systems

Discrete Sinusoids
A discrete sinusoid is given by
x [n] = A cos(ω0n + φ)
whereω0k = 2π
N is the fundamental frequency in radians/sample,where k is an integer. N is the fundamental period.f0N = 1
N is the fundamental frequency in cycles/sample.
WKT,cosω0n = cos(ω0 + 2kπ)n
for any integer k .Hence, discrete sinusoids of fundamental frequencies ω0 andω0 + 2kπ (or, f0 and f0 + k) are identical.
Vijaya Krishna A EC-253: Signals and Systems

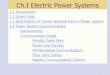
Discrete Sinusoids
−8 −6 −4 −2 0 2 4 6 80
0.2
0.4
0.6
0.8
1
f0=0
−8 −6 −4 −2 0 2 4 6 8−1
−0.5
0
0.5
1
f0=1/8
−8 −6 −4 −2 0 2 4 6 8−1
−0.5
0
0.5
1
f0=1/4
Vijaya Krishna A EC-253: Signals and Systems

Discrete Sinusoids
−8 −6 −4 −2 0 2 4 6 8−1
−0.5
0
0.5
1
f0=1/2
−8 −6 −4 −2 0 2 4 6 8−1
−0.5
0
0.5
1
f0=1
−8 −6 −4 −2 0 2 4 6 8−1
−0.5
0
0.5
1
f0=9/8
Vijaya Krishna A EC-253: Signals and Systems

Discrete Sinusoids: Periodicity
Let the discrete sinusoid x [n] = cosω0n be periodic withperiod N (N > 0).
cosω0n = cosω0(n + N) = cos(ω0n + ω0N)
⇒ ω0N = 2πk .
⇒ ω0 = (2π)kN , or f0 = k
N .
∴ a discrete sinusoid is periodic if and only if f0 is rational.
Let the fundamental period be N. The fundamental frequencyis given by 2π
N = ω0k radians/sample.
Similar results hold for x [n] = e jω0n
Ex: Find the fundamental frequency of cos 3π4 n
Vijaya Krishna A EC-253: Signals and Systems

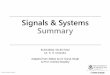
Discrete Sinusoids
0 2 4 6 8 10 12 14 16 18 20−1
−0.5
0
0.5
1cos(πn/4)
0 2 4 6 8 10 12 14 16 18 20−1
−0.5
0
0.5
1cos(3πn/4)
Vijaya Krishna A EC-253: Signals and Systems

Discrete Sinusoids
x [n] = cos 2πf0n can be regarded as a sampled version ofx(t) = cos 2πf0t, sampled at integer values of t.
In general, if we sample x(t) = cos 2πF0t at a samplingfrequency of Fs Hz (Ts = 1
Fssec), we get
x [n] ≡ x(nTs) = cos 2πF0nTs = cos 2πF0
Fsn = cos 2πf0n
Discrete frequency f0 is also called relative frequency andnormalized frequency.
We can relate f0 to F0 only if we know Fs .
A discrete sinusoid with a fundamental frequency of 2πN has
only N harmonics.
Vijaya Krishna A EC-253: Signals and Systems

Systems
Definition
A system is an entity that operates on input signals to produceoutput signals.
A system can be a device, a program, or a natural system.
We consider systems with a single input and a single output.
Notation:
x(t)→ y(t)y(t) = H{x(t)}
We want to
Understand/Modify existing systems.Design new systems.
For these tasks, we need mathematical models for systems.
The models should be accurate enough.They should have enough structure to facilitate analysis.
Vijaya Krishna A EC-253: Signals and Systems

System Properties
Memory:A systems is called memoryless if the output at any value of t (n)depends only on the input at the same value of t (n)
Otherwise, the system is said to have memory.
For systems with memory, the output at any time can dependon future inputs also.
Causality:A system is said to be causal if the present output does notdepend on future inputs.
A system is anticausal if the present output depends only onthe present and future inputs.
A system is noncausal if the present output depends on boththe past and the future inputs.
Memoryless systems are causal.
Vijaya Krishna A EC-253: Signals and Systems

System Properties
Invertibility:A system is said to be invertible if distinct inputs lead to distinctoutputs. In such systems, the input can be recovered back fromthe output.Stability:A system is said to be stable if a bounded input leads to abounded output.For a stable system, if |x(t)| < Mx <∞, ∀t,then |y(t)| < My <∞, ∀tTime InvarianceA system is said to be time invariant if a a time shift in the inputsignal results in an identical time shift in the output signal.x(t)→ y(t) =⇒ x(t − t0)→ y(t − t0)
Vijaya Krishna A EC-253: Signals and Systems

Linearity
A system is said to be linear if y1(t) = H{x1(t)} andy2(t) = H{x2(t)} implies
H{a1x1(t) + a2x2(t)} = a1y1(t) + a2y2(t)
This is known as the superposition property. It includes
Additivity: H{x1(t) + x2(t)} = y1(t) + y2(t)Homogeneity: H{a1x1(t)} = a1y1(t)
Examples:
Integration/differentiation.Linear constant coefficient ordinary differential/differenceequations.
Exercise: Find whether the following systems are linear:
y [n] = nx [n]y [n] = Re{x [n]}y(t) = 5x(t) + 2
Vijaya Krishna A EC-253: Signals and Systems

Exercises
Find which of the system properties hold for the following systems:
y(t) =
{0, t < 0
x(t) + x(t − 2) t≥0
y(t) = Re{x(t)}y [n] = nx [n]
Vijaya Krishna A EC-253: Signals and Systems