Embed Size (px)
Citation preview

CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED Distribution Statement A Approved for public release
2012 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUMMODELING ampSIMULATION TESTING AND VALIDATION (MSTV)
MINI-SYMPOSIUMAUGUST 14-16 MICHIGAN
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEMTRACKED VEHICLES
Michael Wallin1 Ahmed K Aboubakr1 Paramsothy Jayakumar2
Michael D Letherwood2 Ahmed A Shabana1
1 Department of Mechanical and Industrial Engineering University of Illinois at Chicago 842West Taylor Street Chicago IL 60607
2 US Army TARDEC 6501 E 11 Mile Road Warren MI 48397-5000
ABSTRACT
This paper is focused on the dynamic formulation of mechanical joints using differentapproaches that lead to different models with different numbers of degrees of freedom Some ofthese formulations allow for capturing the joint deformations using discrete elastic model whilethe others are continuum-based and capture joint deformation modes that cannot be capturedusing the discrete elastic joint models Specifically three types of joint formulations areconsidered in this investigation the ideal compliant discrete element and compliant continuum-based joint models The ideal joint formulation which does not allow for deformation degrees offreedom in the case of rigid body or small deformation analysis requires introducing a set ofalgebraic constraint equations that can be handled in computational multibody system (MBS)algorithms using two fundamentally different approaches constrained dynamics approach andpenalty method When the constrained dynamics approach is used the constraint equations mustbe satisfied at the position velocity and acceleration levels The penalty method on the otherhand cannot ensure that the algebraic equations are satisfied at the acceleration level In thecompliant discrete element joint formulation no constraint conditions are used instead theconnectivity conditions between bodies are enforced using forces that can be defined in theirmost general form in MBS algorithms using bushing elements that allow for the definition ofgeneral nonlinear forces and moments The new compliant continuum-based joint formulationwhich is based on the finite element (FE) absolute nodal coordinate formulation (ANCF) hasseveral advantages (1) It captures modes of joint deformations that cannot be captured usingthe compliant discrete joint models (2) It leads to linear connectivity conditions therebyallowing for the elimination of the dependent variables at a preprocessing stage (3) It leads to aconstant inertia matrix in the case of chain like structure and (4) It automatically captures thedeformation of the bodies using distributed inertia and elasticity The formulations of these threedifferent joint models are compared in order to shed light on the fundamental differencesbetween them Numerical results of a detailed tracked vehicle model are presented in order todemonstrate the implementation of some of the formulations discussed in this investigation
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 2 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
PROBLEM DEFINITION
Accurate formulation of mechanical joints isnecessary in the computer simulation ofmultibody system (MBS) that representmany technological and industrialapplications An example of these MBSapplications in which accurate modeling ofjoint compliance is necessary is the trackedvehicle shown in figure 1 The links of thetrack chains of this vehicle are connected bypin joints that can be subjected to significantstresses during the vehicle functionaloperations Nonetheless there are differentjoint formulations that can lead to differentdynamic models which have differentnumbers of degrees of freedom This studyinvestigates the use of three differentmethods for formulating mechanical jointsin MBS applications These three methodsare the ideal the compliant discrete elementand the compliant continuum-based jointformulations These three different methodsare described below
Figure 1 M113 tracked vehicle model inSAMS2000
Ideal Joint Formulation
The ideal joint formulation is based on a setof algebraic equations that do not accountfor the joint flexibility this is regardless ofwhether or not the body is flexible Thealgebraic joint equations are expressed interms of the coordinates of the two bodiesconnected by the joint These algebraicequations are considered as constraintequations which can be enforced using twofundamentally different methods theconstrained dynamics approach and thepenalty method In the constrained dynamicsapproach the technique of Lagrangemultipliers or a recursive method is used Inthis case the joint constraint equations mustbe satisfied at the position velocity andacceleration levels The number of degreesof freedom of the model in this case is equalto the number of the system coordinatesminus the number of the algebraic jointconstraint equations In the penalty methodon the other hand the number of degrees offreedom of the model is not affected by thenumber of joint constraint equations Thesejoint algebraic equations are enforced usinghigh stiffness penalty coefficients thatensure that the algebraic constraintequations are satisfied at the position levelThe penalty method does not ensure that theconstraint equations are satisfied at theacceleration level
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 3 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Compliant Discrete Element JointFormulation
In this approach no algebraic equations areused to describe the joints between bodies inthe system The connectivity between bodiesis described using force elements that haveforms defined by the user of the MBS codeMBS system codes have bushing elementsthat can be used to define general linear ornonlinear force and moment expressionsThe stiffness and damping coefficients in theforce and moment expressions can beselected by the user The busing elementscan be used to model the joint compliance inthe case of rigid and flexible body dynamicsIt is important however to point out thatadding bushing elements has no effect onthe number of degrees of freedom of themodel Unlike the penalty method the useof bushing element does not require theformulation of algebraic joint equationsBushing elements allow for systematicallyintroducing three force components andthree moment components
Compliant Continuum-Based JointFormulation
The new finite element (FE) absolute nodalcoordinate formulation (ANCF) allows forsystematically developing new jointformulations that capture modes ofdeformation that cannot be captured usingthe discrete joint models It also allows formodeling body flexibility using new FEmeshes that have constant inertia and linearconnectivity conditions Specifically thecompliant ANCF continuum-based jointformulation has the following advantages
1 ANCF finite elements allow fordeveloping new joint formulations that
capture deformation modes that cannot becaptured using compliant discrete jointformulations The use of the ANCFgradient coordinates allows fordeveloping different joint models withdifferent numbers of degrees of freedomthat allow for different strain modes
2 The use of the ANCF gradient coordinatesallows for developing linear jointconstraint equations These linearalgebraic equations can be used toeliminate dependent variables at apreprocessing stage thereby significantlyreducing the model dimensionality
3 ANCF finite elements can also be used tomodel the body deformation in additionto the joint compliance Distributedinertia and elasticity are used for bothbody flexibility and joint compliance
4 ANCF finite elements lead to new typesof FE meshes that have constant inertia afeature that can be exploited to develop asparse matrix structure of the MBSdynamic equations
It is the objective of this investigation toprovide a comprehensive study of differentjoint formulations and demonstrate thefundamental differences between them whenapplied to the analysis of complex trackedvehicle system models Simulation modelsof the M113 tracked vehicle will be used tocompare the numerical results obtainedusing the joint formulations discussed in thispaper These results are obtained using thegeneral purpose MBS computer codeSAMS2000 [17] which allows forsystematically modeling MBS applicationsusing the augmented formulation penaltymethod bushing elements and ANCF finiteelements In the augmented formulation thetechnique of Lagrange multipliers is used
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 4 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
The computational algorithm used inSAMS2000 ensures that the algebraicconstraint equations are satisfied at theposition velocity and acceleration levels
TRACKED VEHICLESBACKGROUND
High mobility tracked vehicle such asmilitary battle tanks and armored personalcarriers are designed for the mobility overrough and off-road terrains Investigationson the dynamic analysis of such trackedvehicles shown in figure 1 have been limitedbecause of the complexity of the forcesresulting from interaction between thevehicle components These forces areimpulsive in nature and their dynamicmodeling requires sophisticatedcomputational capabilities Several twodimensional models for the analysis oftracked vehicle have been developedGalitsis [3] demonstrated that the dynamictrack tension and suspension loads in highspeed tracked vehicles developed byanalytical methods are useful in evaluatingthe dynamic characteristics of the trackedvehicle components Bando et al [1]outlined a procedure for the design andanalysis of rubber tracked small-sizebulldozers and presented a computersimulation which was used in the evaluationof the vehicle performance Both steel andcontinuous rubber tracks are modeled bydiscretizing them into several rigid bodiesconnected by compliant elements Thesimulation results indicate that the vehiclehas favorable characteristics such as lessdamage to the road surface and reducedvibration and noise Murray and Canfield [7]used general purpose multibody computercodes to model a simple track link andsprocket system The behavior of the
interaction between the track link and thesprocket was illustrated graphically and itwas found that the computer time can besignificantly reduced by usingsupercomputers Nakanishi et al [8]developed a two dimensional contact forcemodel for planar analysis of multibodytracked vehicle systems Modal parameters(modal mass modal stiffness modaldamping and mode shapes) which aredetermined experimentally are employed tosimulate the nonlinear dynamic behavior ofa multibody tracked vehicle which consistsof interconnected rigid and flexiblecomponents The equations of motion of thevehicle are formulated in terms of a set ofmodal and reference generalizedcoordinates and the theoretical basis forextracting the component modal parametersof the chassis from the modal parameters ofthe assembled vehicle is described
A number of approaches have beenproposed in the literature for developingthree-dimensional MBS models Choi et al[2] developed the nonlinear dynamicequations of motion of the three-dimensional multibody tracked vehiclesystems taking into consideration thedegrees of freedom of the track chains Toavoid the solution of a system of differentialand algebraic equations the recursivekinematic equations of the vehicle areexpressed in terms of the independent jointcoordinates In order to take advantage ofsparse matrix algorithms the independentdifferential equations of the three-dimensional tracked vehicles are obtainedusing the velocity transformation methodThree-dimensional nonlinear contact forcemodels that describe the interaction betweenthe track links and the vehicle componentssuch as the rollers sprockets and idlers aswell as the interaction between the track
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 5 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
links and the ground are developed and usedto define the generalized contact forcesassociated with the vehicle generalizedcoordinates A computer simulation of atracked vehicle in which the track isassumed to consist of track links connectedby a single degree of freedom revolute jointis presented in order to demonstrate the useof the formulations presented in their studyRyu et al [13] developed compliant tracklink models and investigated the use of thesemodels in the dynamic analysis of high-speed high-mobility tracked vehicles Thecharacteristics of the compliant elementsused in this investigation to describe thetrack joints are measured experimentally Anumerical integration method having arelatively large stability region is employedin order to maintain the solution accuracyand a variable step size integration algorithmis used in order to improve the efficiencyThe dimensionality problem is solved bydecoupling the equations of motion of thechassis and track subsystems Recursivemethods are used to obtain a minimum set ofequations for the chassis subsystem Severalsimulations scenarios including anaccelerated motion high-speed motionbraking and turning motion of the high-mobility vehicle are tested in order todemonstrate the effectiveness and validity ofthe methods proposed Ozaki and Shabana[9-10] evaluated the performance ofdifferent formulations using a trackedvehicle model that is subjected to impulsiveforces They developed models for jointconstraints and the impulsive contact forcesthat result from the interaction between thetrack chains and the vehicle components aswell as the interaction between these chainsand the ground The nonlinear contact forcemodels used in their numerical study weredeveloped and the formulations of thegeneralized forces associated with the
generalized coordinates used in each of theformulations were presented Ryu et al [14]investigated the nonlinear dynamicmodeling methods for the virtual design oftracked vehicles by using MBS dynamicsimulation techniques The results includehigh oscillatory signals resulting from theimpulsive contact forces and the use of stiffcompliant elements to represent the jointsbetween the track links Each track link ismodeled as a body which has six degrees offreedom and two compliant bushingelements are used to connect track linksEfficient contact search and kinematicsalgorithms in the context of the compliancecontact model are developed to detect theinteractions between track links rollerssprockets and ground for the sake of speedyand robust solutions Rubinstein and Hitron[12] developed a three-dimensional multi-body simulation model for simulating thedynamic behavior of tracked off-roadvehicles using the LMS-DADS simulationprogram Each track link is considered arigid body and is connected to itsneighboring track link via a revolute jointThe road-wheel track-link interaction isdescribed using three-dimensional contactforce elements and the track-link terraininteraction is modeled using a pressure-sinkage relationship
SCOPE AND OBJECTIVES OF THISINVESTIGATION
While some of the formulations used in theanalysis of tracked vehicles require the useof MBS algorithms that are designed forsolving systems of differentialalgebraicequations arising from kinematic jointconstraints other formulations do notrequire the use of such algorithms but usepenalty forces or complaint elements to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 6 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
model the chain dynamics The track linksare subjected to high contact forces thatproduce high stress levels which oftencause damage to the track links during thefunctional operation of the vehicle Theobjective of this paper is to present andcompare between different jointformulations that can be used in the dynamicmodeling of complex tracked vehiclesystems Better understanding of theseformulations can lead to more accurate andpossibly faster computer simulations thatcan be the basis for more reliableperformance evaluation of the vehicles Thetracked vehicles considered in thisinvestigation are assumed to consist ofinterconnected bodies that can have arbitrarydisplacements In the first chain formulationreferred to in this paper as the ideal jointchain model kinematic joints between thetrack links are described using nonlinearconstraint equations that lead to significantreduction in the number of vehicle degreesof freedom This joint model does notrequire assuming stiffness and damping forthe track link connectivity and thereforedoes not allow for flexibility between thetack links it requires however the solutionof a system of differential and algebraicequations if redundant coordinateformulations are used Redundant coordinatealgorithms based on the Lagrangianaugmented form of the equations of motionrequire the use of Newton-Raphson methodin order to ensure that the constraintequations are satisfied at the position levelRecursive and joint variables methods canalso be used instead of redundant coordinateformulations in order to avoid Newton-Raphson algorithm Another approach thatcan be used to enforce the constraintequations at the position level is the penaltymethod This model does not lead to
reduction in the number of the systemdegrees of freedom
Two other approaches that capture the jointcompliance will also be considered in thisstudy The first is the compliant discreteelement method that employs MBS bushingelements to define the connectivity betweenthe track links This approach as in the caseof the penalty method requires assumingstiffness and damping coefficients at theconnection and therefore it allows for theflexibility between the track links In thesecond the compliant continuum-based jointformulation that employs ANCF finiteelements is used This approach whichcaptures new joint deformation modes leadsto linear connectivity conditions which canbe applied at a preprocessing stage allowingfor an efficient elimination of the dependentvariables this leads to a constant inertiamatrix and zero Coriolis and centrifugalforces [18] This approach leads to newtypes of FE chain meshes that have desirablecharacteristics
ALGEBRAIC CONSTRAINTEQUATIONS
In the methods of constrained dynamicsthere are two approaches that are often usedto model ideal mechanical joints that do notaccount for the effect of elasticity anddamping These two methods are theaugmented formulation that employs thetechnique of Lagrange multipliers or therecursive formulation which allows forsystematic elimination of the dependentvariables using the algebraic equationsThese two formulations are briefly discussedin this section
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
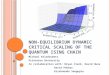
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 2 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
PROBLEM DEFINITION
Accurate formulation of mechanical joints isnecessary in the computer simulation ofmultibody system (MBS) that representmany technological and industrialapplications An example of these MBSapplications in which accurate modeling ofjoint compliance is necessary is the trackedvehicle shown in figure 1 The links of thetrack chains of this vehicle are connected bypin joints that can be subjected to significantstresses during the vehicle functionaloperations Nonetheless there are differentjoint formulations that can lead to differentdynamic models which have differentnumbers of degrees of freedom This studyinvestigates the use of three differentmethods for formulating mechanical jointsin MBS applications These three methodsare the ideal the compliant discrete elementand the compliant continuum-based jointformulations These three different methodsare described below
Figure 1 M113 tracked vehicle model inSAMS2000
Ideal Joint Formulation
The ideal joint formulation is based on a setof algebraic equations that do not accountfor the joint flexibility this is regardless ofwhether or not the body is flexible Thealgebraic joint equations are expressed interms of the coordinates of the two bodiesconnected by the joint These algebraicequations are considered as constraintequations which can be enforced using twofundamentally different methods theconstrained dynamics approach and thepenalty method In the constrained dynamicsapproach the technique of Lagrangemultipliers or a recursive method is used Inthis case the joint constraint equations mustbe satisfied at the position velocity andacceleration levels The number of degreesof freedom of the model in this case is equalto the number of the system coordinatesminus the number of the algebraic jointconstraint equations In the penalty methodon the other hand the number of degrees offreedom of the model is not affected by thenumber of joint constraint equations Thesejoint algebraic equations are enforced usinghigh stiffness penalty coefficients thatensure that the algebraic constraintequations are satisfied at the position levelThe penalty method does not ensure that theconstraint equations are satisfied at theacceleration level
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 3 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Compliant Discrete Element JointFormulation
In this approach no algebraic equations areused to describe the joints between bodies inthe system The connectivity between bodiesis described using force elements that haveforms defined by the user of the MBS codeMBS system codes have bushing elementsthat can be used to define general linear ornonlinear force and moment expressionsThe stiffness and damping coefficients in theforce and moment expressions can beselected by the user The busing elementscan be used to model the joint compliance inthe case of rigid and flexible body dynamicsIt is important however to point out thatadding bushing elements has no effect onthe number of degrees of freedom of themodel Unlike the penalty method the useof bushing element does not require theformulation of algebraic joint equationsBushing elements allow for systematicallyintroducing three force components andthree moment components
Compliant Continuum-Based JointFormulation
The new finite element (FE) absolute nodalcoordinate formulation (ANCF) allows forsystematically developing new jointformulations that capture modes ofdeformation that cannot be captured usingthe discrete joint models It also allows formodeling body flexibility using new FEmeshes that have constant inertia and linearconnectivity conditions Specifically thecompliant ANCF continuum-based jointformulation has the following advantages
1 ANCF finite elements allow fordeveloping new joint formulations that
capture deformation modes that cannot becaptured using compliant discrete jointformulations The use of the ANCFgradient coordinates allows fordeveloping different joint models withdifferent numbers of degrees of freedomthat allow for different strain modes
2 The use of the ANCF gradient coordinatesallows for developing linear jointconstraint equations These linearalgebraic equations can be used toeliminate dependent variables at apreprocessing stage thereby significantlyreducing the model dimensionality
3 ANCF finite elements can also be used tomodel the body deformation in additionto the joint compliance Distributedinertia and elasticity are used for bothbody flexibility and joint compliance
4 ANCF finite elements lead to new typesof FE meshes that have constant inertia afeature that can be exploited to develop asparse matrix structure of the MBSdynamic equations
It is the objective of this investigation toprovide a comprehensive study of differentjoint formulations and demonstrate thefundamental differences between them whenapplied to the analysis of complex trackedvehicle system models Simulation modelsof the M113 tracked vehicle will be used tocompare the numerical results obtainedusing the joint formulations discussed in thispaper These results are obtained using thegeneral purpose MBS computer codeSAMS2000 [17] which allows forsystematically modeling MBS applicationsusing the augmented formulation penaltymethod bushing elements and ANCF finiteelements In the augmented formulation thetechnique of Lagrange multipliers is used
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 4 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
The computational algorithm used inSAMS2000 ensures that the algebraicconstraint equations are satisfied at theposition velocity and acceleration levels
TRACKED VEHICLESBACKGROUND
High mobility tracked vehicle such asmilitary battle tanks and armored personalcarriers are designed for the mobility overrough and off-road terrains Investigationson the dynamic analysis of such trackedvehicles shown in figure 1 have been limitedbecause of the complexity of the forcesresulting from interaction between thevehicle components These forces areimpulsive in nature and their dynamicmodeling requires sophisticatedcomputational capabilities Several twodimensional models for the analysis oftracked vehicle have been developedGalitsis [3] demonstrated that the dynamictrack tension and suspension loads in highspeed tracked vehicles developed byanalytical methods are useful in evaluatingthe dynamic characteristics of the trackedvehicle components Bando et al [1]outlined a procedure for the design andanalysis of rubber tracked small-sizebulldozers and presented a computersimulation which was used in the evaluationof the vehicle performance Both steel andcontinuous rubber tracks are modeled bydiscretizing them into several rigid bodiesconnected by compliant elements Thesimulation results indicate that the vehiclehas favorable characteristics such as lessdamage to the road surface and reducedvibration and noise Murray and Canfield [7]used general purpose multibody computercodes to model a simple track link andsprocket system The behavior of the
interaction between the track link and thesprocket was illustrated graphically and itwas found that the computer time can besignificantly reduced by usingsupercomputers Nakanishi et al [8]developed a two dimensional contact forcemodel for planar analysis of multibodytracked vehicle systems Modal parameters(modal mass modal stiffness modaldamping and mode shapes) which aredetermined experimentally are employed tosimulate the nonlinear dynamic behavior ofa multibody tracked vehicle which consistsof interconnected rigid and flexiblecomponents The equations of motion of thevehicle are formulated in terms of a set ofmodal and reference generalizedcoordinates and the theoretical basis forextracting the component modal parametersof the chassis from the modal parameters ofthe assembled vehicle is described
A number of approaches have beenproposed in the literature for developingthree-dimensional MBS models Choi et al[2] developed the nonlinear dynamicequations of motion of the three-dimensional multibody tracked vehiclesystems taking into consideration thedegrees of freedom of the track chains Toavoid the solution of a system of differentialand algebraic equations the recursivekinematic equations of the vehicle areexpressed in terms of the independent jointcoordinates In order to take advantage ofsparse matrix algorithms the independentdifferential equations of the three-dimensional tracked vehicles are obtainedusing the velocity transformation methodThree-dimensional nonlinear contact forcemodels that describe the interaction betweenthe track links and the vehicle componentssuch as the rollers sprockets and idlers aswell as the interaction between the track
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 5 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
links and the ground are developed and usedto define the generalized contact forcesassociated with the vehicle generalizedcoordinates A computer simulation of atracked vehicle in which the track isassumed to consist of track links connectedby a single degree of freedom revolute jointis presented in order to demonstrate the useof the formulations presented in their studyRyu et al [13] developed compliant tracklink models and investigated the use of thesemodels in the dynamic analysis of high-speed high-mobility tracked vehicles Thecharacteristics of the compliant elementsused in this investigation to describe thetrack joints are measured experimentally Anumerical integration method having arelatively large stability region is employedin order to maintain the solution accuracyand a variable step size integration algorithmis used in order to improve the efficiencyThe dimensionality problem is solved bydecoupling the equations of motion of thechassis and track subsystems Recursivemethods are used to obtain a minimum set ofequations for the chassis subsystem Severalsimulations scenarios including anaccelerated motion high-speed motionbraking and turning motion of the high-mobility vehicle are tested in order todemonstrate the effectiveness and validity ofthe methods proposed Ozaki and Shabana[9-10] evaluated the performance ofdifferent formulations using a trackedvehicle model that is subjected to impulsiveforces They developed models for jointconstraints and the impulsive contact forcesthat result from the interaction between thetrack chains and the vehicle components aswell as the interaction between these chainsand the ground The nonlinear contact forcemodels used in their numerical study weredeveloped and the formulations of thegeneralized forces associated with the
generalized coordinates used in each of theformulations were presented Ryu et al [14]investigated the nonlinear dynamicmodeling methods for the virtual design oftracked vehicles by using MBS dynamicsimulation techniques The results includehigh oscillatory signals resulting from theimpulsive contact forces and the use of stiffcompliant elements to represent the jointsbetween the track links Each track link ismodeled as a body which has six degrees offreedom and two compliant bushingelements are used to connect track linksEfficient contact search and kinematicsalgorithms in the context of the compliancecontact model are developed to detect theinteractions between track links rollerssprockets and ground for the sake of speedyand robust solutions Rubinstein and Hitron[12] developed a three-dimensional multi-body simulation model for simulating thedynamic behavior of tracked off-roadvehicles using the LMS-DADS simulationprogram Each track link is considered arigid body and is connected to itsneighboring track link via a revolute jointThe road-wheel track-link interaction isdescribed using three-dimensional contactforce elements and the track-link terraininteraction is modeled using a pressure-sinkage relationship
SCOPE AND OBJECTIVES OF THISINVESTIGATION
While some of the formulations used in theanalysis of tracked vehicles require the useof MBS algorithms that are designed forsolving systems of differentialalgebraicequations arising from kinematic jointconstraints other formulations do notrequire the use of such algorithms but usepenalty forces or complaint elements to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 6 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
model the chain dynamics The track linksare subjected to high contact forces thatproduce high stress levels which oftencause damage to the track links during thefunctional operation of the vehicle Theobjective of this paper is to present andcompare between different jointformulations that can be used in the dynamicmodeling of complex tracked vehiclesystems Better understanding of theseformulations can lead to more accurate andpossibly faster computer simulations thatcan be the basis for more reliableperformance evaluation of the vehicles Thetracked vehicles considered in thisinvestigation are assumed to consist ofinterconnected bodies that can have arbitrarydisplacements In the first chain formulationreferred to in this paper as the ideal jointchain model kinematic joints between thetrack links are described using nonlinearconstraint equations that lead to significantreduction in the number of vehicle degreesof freedom This joint model does notrequire assuming stiffness and damping forthe track link connectivity and thereforedoes not allow for flexibility between thetack links it requires however the solutionof a system of differential and algebraicequations if redundant coordinateformulations are used Redundant coordinatealgorithms based on the Lagrangianaugmented form of the equations of motionrequire the use of Newton-Raphson methodin order to ensure that the constraintequations are satisfied at the position levelRecursive and joint variables methods canalso be used instead of redundant coordinateformulations in order to avoid Newton-Raphson algorithm Another approach thatcan be used to enforce the constraintequations at the position level is the penaltymethod This model does not lead to
reduction in the number of the systemdegrees of freedom
Two other approaches that capture the jointcompliance will also be considered in thisstudy The first is the compliant discreteelement method that employs MBS bushingelements to define the connectivity betweenthe track links This approach as in the caseof the penalty method requires assumingstiffness and damping coefficients at theconnection and therefore it allows for theflexibility between the track links In thesecond the compliant continuum-based jointformulation that employs ANCF finiteelements is used This approach whichcaptures new joint deformation modes leadsto linear connectivity conditions which canbe applied at a preprocessing stage allowingfor an efficient elimination of the dependentvariables this leads to a constant inertiamatrix and zero Coriolis and centrifugalforces [18] This approach leads to newtypes of FE chain meshes that have desirablecharacteristics
ALGEBRAIC CONSTRAINTEQUATIONS
In the methods of constrained dynamicsthere are two approaches that are often usedto model ideal mechanical joints that do notaccount for the effect of elasticity anddamping These two methods are theaugmented formulation that employs thetechnique of Lagrange multipliers or therecursive formulation which allows forsystematic elimination of the dependentvariables using the algebraic equationsThese two formulations are briefly discussedin this section
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 3 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Compliant Discrete Element JointFormulation
In this approach no algebraic equations areused to describe the joints between bodies inthe system The connectivity between bodiesis described using force elements that haveforms defined by the user of the MBS codeMBS system codes have bushing elementsthat can be used to define general linear ornonlinear force and moment expressionsThe stiffness and damping coefficients in theforce and moment expressions can beselected by the user The busing elementscan be used to model the joint compliance inthe case of rigid and flexible body dynamicsIt is important however to point out thatadding bushing elements has no effect onthe number of degrees of freedom of themodel Unlike the penalty method the useof bushing element does not require theformulation of algebraic joint equationsBushing elements allow for systematicallyintroducing three force components andthree moment components
Compliant Continuum-Based JointFormulation
The new finite element (FE) absolute nodalcoordinate formulation (ANCF) allows forsystematically developing new jointformulations that capture modes ofdeformation that cannot be captured usingthe discrete joint models It also allows formodeling body flexibility using new FEmeshes that have constant inertia and linearconnectivity conditions Specifically thecompliant ANCF continuum-based jointformulation has the following advantages
1 ANCF finite elements allow fordeveloping new joint formulations that
capture deformation modes that cannot becaptured using compliant discrete jointformulations The use of the ANCFgradient coordinates allows fordeveloping different joint models withdifferent numbers of degrees of freedomthat allow for different strain modes
2 The use of the ANCF gradient coordinatesallows for developing linear jointconstraint equations These linearalgebraic equations can be used toeliminate dependent variables at apreprocessing stage thereby significantlyreducing the model dimensionality
3 ANCF finite elements can also be used tomodel the body deformation in additionto the joint compliance Distributedinertia and elasticity are used for bothbody flexibility and joint compliance
4 ANCF finite elements lead to new typesof FE meshes that have constant inertia afeature that can be exploited to develop asparse matrix structure of the MBSdynamic equations
It is the objective of this investigation toprovide a comprehensive study of differentjoint formulations and demonstrate thefundamental differences between them whenapplied to the analysis of complex trackedvehicle system models Simulation modelsof the M113 tracked vehicle will be used tocompare the numerical results obtainedusing the joint formulations discussed in thispaper These results are obtained using thegeneral purpose MBS computer codeSAMS2000 [17] which allows forsystematically modeling MBS applicationsusing the augmented formulation penaltymethod bushing elements and ANCF finiteelements In the augmented formulation thetechnique of Lagrange multipliers is used
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 4 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
The computational algorithm used inSAMS2000 ensures that the algebraicconstraint equations are satisfied at theposition velocity and acceleration levels
TRACKED VEHICLESBACKGROUND
High mobility tracked vehicle such asmilitary battle tanks and armored personalcarriers are designed for the mobility overrough and off-road terrains Investigationson the dynamic analysis of such trackedvehicles shown in figure 1 have been limitedbecause of the complexity of the forcesresulting from interaction between thevehicle components These forces areimpulsive in nature and their dynamicmodeling requires sophisticatedcomputational capabilities Several twodimensional models for the analysis oftracked vehicle have been developedGalitsis [3] demonstrated that the dynamictrack tension and suspension loads in highspeed tracked vehicles developed byanalytical methods are useful in evaluatingthe dynamic characteristics of the trackedvehicle components Bando et al [1]outlined a procedure for the design andanalysis of rubber tracked small-sizebulldozers and presented a computersimulation which was used in the evaluationof the vehicle performance Both steel andcontinuous rubber tracks are modeled bydiscretizing them into several rigid bodiesconnected by compliant elements Thesimulation results indicate that the vehiclehas favorable characteristics such as lessdamage to the road surface and reducedvibration and noise Murray and Canfield [7]used general purpose multibody computercodes to model a simple track link andsprocket system The behavior of the
interaction between the track link and thesprocket was illustrated graphically and itwas found that the computer time can besignificantly reduced by usingsupercomputers Nakanishi et al [8]developed a two dimensional contact forcemodel for planar analysis of multibodytracked vehicle systems Modal parameters(modal mass modal stiffness modaldamping and mode shapes) which aredetermined experimentally are employed tosimulate the nonlinear dynamic behavior ofa multibody tracked vehicle which consistsof interconnected rigid and flexiblecomponents The equations of motion of thevehicle are formulated in terms of a set ofmodal and reference generalizedcoordinates and the theoretical basis forextracting the component modal parametersof the chassis from the modal parameters ofthe assembled vehicle is described
A number of approaches have beenproposed in the literature for developingthree-dimensional MBS models Choi et al[2] developed the nonlinear dynamicequations of motion of the three-dimensional multibody tracked vehiclesystems taking into consideration thedegrees of freedom of the track chains Toavoid the solution of a system of differentialand algebraic equations the recursivekinematic equations of the vehicle areexpressed in terms of the independent jointcoordinates In order to take advantage ofsparse matrix algorithms the independentdifferential equations of the three-dimensional tracked vehicles are obtainedusing the velocity transformation methodThree-dimensional nonlinear contact forcemodels that describe the interaction betweenthe track links and the vehicle componentssuch as the rollers sprockets and idlers aswell as the interaction between the track
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 5 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
links and the ground are developed and usedto define the generalized contact forcesassociated with the vehicle generalizedcoordinates A computer simulation of atracked vehicle in which the track isassumed to consist of track links connectedby a single degree of freedom revolute jointis presented in order to demonstrate the useof the formulations presented in their studyRyu et al [13] developed compliant tracklink models and investigated the use of thesemodels in the dynamic analysis of high-speed high-mobility tracked vehicles Thecharacteristics of the compliant elementsused in this investigation to describe thetrack joints are measured experimentally Anumerical integration method having arelatively large stability region is employedin order to maintain the solution accuracyand a variable step size integration algorithmis used in order to improve the efficiencyThe dimensionality problem is solved bydecoupling the equations of motion of thechassis and track subsystems Recursivemethods are used to obtain a minimum set ofequations for the chassis subsystem Severalsimulations scenarios including anaccelerated motion high-speed motionbraking and turning motion of the high-mobility vehicle are tested in order todemonstrate the effectiveness and validity ofthe methods proposed Ozaki and Shabana[9-10] evaluated the performance ofdifferent formulations using a trackedvehicle model that is subjected to impulsiveforces They developed models for jointconstraints and the impulsive contact forcesthat result from the interaction between thetrack chains and the vehicle components aswell as the interaction between these chainsand the ground The nonlinear contact forcemodels used in their numerical study weredeveloped and the formulations of thegeneralized forces associated with the
generalized coordinates used in each of theformulations were presented Ryu et al [14]investigated the nonlinear dynamicmodeling methods for the virtual design oftracked vehicles by using MBS dynamicsimulation techniques The results includehigh oscillatory signals resulting from theimpulsive contact forces and the use of stiffcompliant elements to represent the jointsbetween the track links Each track link ismodeled as a body which has six degrees offreedom and two compliant bushingelements are used to connect track linksEfficient contact search and kinematicsalgorithms in the context of the compliancecontact model are developed to detect theinteractions between track links rollerssprockets and ground for the sake of speedyand robust solutions Rubinstein and Hitron[12] developed a three-dimensional multi-body simulation model for simulating thedynamic behavior of tracked off-roadvehicles using the LMS-DADS simulationprogram Each track link is considered arigid body and is connected to itsneighboring track link via a revolute jointThe road-wheel track-link interaction isdescribed using three-dimensional contactforce elements and the track-link terraininteraction is modeled using a pressure-sinkage relationship
SCOPE AND OBJECTIVES OF THISINVESTIGATION
While some of the formulations used in theanalysis of tracked vehicles require the useof MBS algorithms that are designed forsolving systems of differentialalgebraicequations arising from kinematic jointconstraints other formulations do notrequire the use of such algorithms but usepenalty forces or complaint elements to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 6 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
model the chain dynamics The track linksare subjected to high contact forces thatproduce high stress levels which oftencause damage to the track links during thefunctional operation of the vehicle Theobjective of this paper is to present andcompare between different jointformulations that can be used in the dynamicmodeling of complex tracked vehiclesystems Better understanding of theseformulations can lead to more accurate andpossibly faster computer simulations thatcan be the basis for more reliableperformance evaluation of the vehicles Thetracked vehicles considered in thisinvestigation are assumed to consist ofinterconnected bodies that can have arbitrarydisplacements In the first chain formulationreferred to in this paper as the ideal jointchain model kinematic joints between thetrack links are described using nonlinearconstraint equations that lead to significantreduction in the number of vehicle degreesof freedom This joint model does notrequire assuming stiffness and damping forthe track link connectivity and thereforedoes not allow for flexibility between thetack links it requires however the solutionof a system of differential and algebraicequations if redundant coordinateformulations are used Redundant coordinatealgorithms based on the Lagrangianaugmented form of the equations of motionrequire the use of Newton-Raphson methodin order to ensure that the constraintequations are satisfied at the position levelRecursive and joint variables methods canalso be used instead of redundant coordinateformulations in order to avoid Newton-Raphson algorithm Another approach thatcan be used to enforce the constraintequations at the position level is the penaltymethod This model does not lead to
reduction in the number of the systemdegrees of freedom
Two other approaches that capture the jointcompliance will also be considered in thisstudy The first is the compliant discreteelement method that employs MBS bushingelements to define the connectivity betweenthe track links This approach as in the caseof the penalty method requires assumingstiffness and damping coefficients at theconnection and therefore it allows for theflexibility between the track links In thesecond the compliant continuum-based jointformulation that employs ANCF finiteelements is used This approach whichcaptures new joint deformation modes leadsto linear connectivity conditions which canbe applied at a preprocessing stage allowingfor an efficient elimination of the dependentvariables this leads to a constant inertiamatrix and zero Coriolis and centrifugalforces [18] This approach leads to newtypes of FE chain meshes that have desirablecharacteristics
ALGEBRAIC CONSTRAINTEQUATIONS
In the methods of constrained dynamicsthere are two approaches that are often usedto model ideal mechanical joints that do notaccount for the effect of elasticity anddamping These two methods are theaugmented formulation that employs thetechnique of Lagrange multipliers or therecursive formulation which allows forsystematic elimination of the dependentvariables using the algebraic equationsThese two formulations are briefly discussedin this section
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 4 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
The computational algorithm used inSAMS2000 ensures that the algebraicconstraint equations are satisfied at theposition velocity and acceleration levels
TRACKED VEHICLESBACKGROUND
High mobility tracked vehicle such asmilitary battle tanks and armored personalcarriers are designed for the mobility overrough and off-road terrains Investigationson the dynamic analysis of such trackedvehicles shown in figure 1 have been limitedbecause of the complexity of the forcesresulting from interaction between thevehicle components These forces areimpulsive in nature and their dynamicmodeling requires sophisticatedcomputational capabilities Several twodimensional models for the analysis oftracked vehicle have been developedGalitsis [3] demonstrated that the dynamictrack tension and suspension loads in highspeed tracked vehicles developed byanalytical methods are useful in evaluatingthe dynamic characteristics of the trackedvehicle components Bando et al [1]outlined a procedure for the design andanalysis of rubber tracked small-sizebulldozers and presented a computersimulation which was used in the evaluationof the vehicle performance Both steel andcontinuous rubber tracks are modeled bydiscretizing them into several rigid bodiesconnected by compliant elements Thesimulation results indicate that the vehiclehas favorable characteristics such as lessdamage to the road surface and reducedvibration and noise Murray and Canfield [7]used general purpose multibody computercodes to model a simple track link andsprocket system The behavior of the
interaction between the track link and thesprocket was illustrated graphically and itwas found that the computer time can besignificantly reduced by usingsupercomputers Nakanishi et al [8]developed a two dimensional contact forcemodel for planar analysis of multibodytracked vehicle systems Modal parameters(modal mass modal stiffness modaldamping and mode shapes) which aredetermined experimentally are employed tosimulate the nonlinear dynamic behavior ofa multibody tracked vehicle which consistsof interconnected rigid and flexiblecomponents The equations of motion of thevehicle are formulated in terms of a set ofmodal and reference generalizedcoordinates and the theoretical basis forextracting the component modal parametersof the chassis from the modal parameters ofthe assembled vehicle is described
A number of approaches have beenproposed in the literature for developingthree-dimensional MBS models Choi et al[2] developed the nonlinear dynamicequations of motion of the three-dimensional multibody tracked vehiclesystems taking into consideration thedegrees of freedom of the track chains Toavoid the solution of a system of differentialand algebraic equations the recursivekinematic equations of the vehicle areexpressed in terms of the independent jointcoordinates In order to take advantage ofsparse matrix algorithms the independentdifferential equations of the three-dimensional tracked vehicles are obtainedusing the velocity transformation methodThree-dimensional nonlinear contact forcemodels that describe the interaction betweenthe track links and the vehicle componentssuch as the rollers sprockets and idlers aswell as the interaction between the track
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 5 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
links and the ground are developed and usedto define the generalized contact forcesassociated with the vehicle generalizedcoordinates A computer simulation of atracked vehicle in which the track isassumed to consist of track links connectedby a single degree of freedom revolute jointis presented in order to demonstrate the useof the formulations presented in their studyRyu et al [13] developed compliant tracklink models and investigated the use of thesemodels in the dynamic analysis of high-speed high-mobility tracked vehicles Thecharacteristics of the compliant elementsused in this investigation to describe thetrack joints are measured experimentally Anumerical integration method having arelatively large stability region is employedin order to maintain the solution accuracyand a variable step size integration algorithmis used in order to improve the efficiencyThe dimensionality problem is solved bydecoupling the equations of motion of thechassis and track subsystems Recursivemethods are used to obtain a minimum set ofequations for the chassis subsystem Severalsimulations scenarios including anaccelerated motion high-speed motionbraking and turning motion of the high-mobility vehicle are tested in order todemonstrate the effectiveness and validity ofthe methods proposed Ozaki and Shabana[9-10] evaluated the performance ofdifferent formulations using a trackedvehicle model that is subjected to impulsiveforces They developed models for jointconstraints and the impulsive contact forcesthat result from the interaction between thetrack chains and the vehicle components aswell as the interaction between these chainsand the ground The nonlinear contact forcemodels used in their numerical study weredeveloped and the formulations of thegeneralized forces associated with the
generalized coordinates used in each of theformulations were presented Ryu et al [14]investigated the nonlinear dynamicmodeling methods for the virtual design oftracked vehicles by using MBS dynamicsimulation techniques The results includehigh oscillatory signals resulting from theimpulsive contact forces and the use of stiffcompliant elements to represent the jointsbetween the track links Each track link ismodeled as a body which has six degrees offreedom and two compliant bushingelements are used to connect track linksEfficient contact search and kinematicsalgorithms in the context of the compliancecontact model are developed to detect theinteractions between track links rollerssprockets and ground for the sake of speedyand robust solutions Rubinstein and Hitron[12] developed a three-dimensional multi-body simulation model for simulating thedynamic behavior of tracked off-roadvehicles using the LMS-DADS simulationprogram Each track link is considered arigid body and is connected to itsneighboring track link via a revolute jointThe road-wheel track-link interaction isdescribed using three-dimensional contactforce elements and the track-link terraininteraction is modeled using a pressure-sinkage relationship
SCOPE AND OBJECTIVES OF THISINVESTIGATION
While some of the formulations used in theanalysis of tracked vehicles require the useof MBS algorithms that are designed forsolving systems of differentialalgebraicequations arising from kinematic jointconstraints other formulations do notrequire the use of such algorithms but usepenalty forces or complaint elements to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 6 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
model the chain dynamics The track linksare subjected to high contact forces thatproduce high stress levels which oftencause damage to the track links during thefunctional operation of the vehicle Theobjective of this paper is to present andcompare between different jointformulations that can be used in the dynamicmodeling of complex tracked vehiclesystems Better understanding of theseformulations can lead to more accurate andpossibly faster computer simulations thatcan be the basis for more reliableperformance evaluation of the vehicles Thetracked vehicles considered in thisinvestigation are assumed to consist ofinterconnected bodies that can have arbitrarydisplacements In the first chain formulationreferred to in this paper as the ideal jointchain model kinematic joints between thetrack links are described using nonlinearconstraint equations that lead to significantreduction in the number of vehicle degreesof freedom This joint model does notrequire assuming stiffness and damping forthe track link connectivity and thereforedoes not allow for flexibility between thetack links it requires however the solutionof a system of differential and algebraicequations if redundant coordinateformulations are used Redundant coordinatealgorithms based on the Lagrangianaugmented form of the equations of motionrequire the use of Newton-Raphson methodin order to ensure that the constraintequations are satisfied at the position levelRecursive and joint variables methods canalso be used instead of redundant coordinateformulations in order to avoid Newton-Raphson algorithm Another approach thatcan be used to enforce the constraintequations at the position level is the penaltymethod This model does not lead to
reduction in the number of the systemdegrees of freedom
Two other approaches that capture the jointcompliance will also be considered in thisstudy The first is the compliant discreteelement method that employs MBS bushingelements to define the connectivity betweenthe track links This approach as in the caseof the penalty method requires assumingstiffness and damping coefficients at theconnection and therefore it allows for theflexibility between the track links In thesecond the compliant continuum-based jointformulation that employs ANCF finiteelements is used This approach whichcaptures new joint deformation modes leadsto linear connectivity conditions which canbe applied at a preprocessing stage allowingfor an efficient elimination of the dependentvariables this leads to a constant inertiamatrix and zero Coriolis and centrifugalforces [18] This approach leads to newtypes of FE chain meshes that have desirablecharacteristics
ALGEBRAIC CONSTRAINTEQUATIONS
In the methods of constrained dynamicsthere are two approaches that are often usedto model ideal mechanical joints that do notaccount for the effect of elasticity anddamping These two methods are theaugmented formulation that employs thetechnique of Lagrange multipliers or therecursive formulation which allows forsystematic elimination of the dependentvariables using the algebraic equationsThese two formulations are briefly discussedin this section
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 5 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
links and the ground are developed and usedto define the generalized contact forcesassociated with the vehicle generalizedcoordinates A computer simulation of atracked vehicle in which the track isassumed to consist of track links connectedby a single degree of freedom revolute jointis presented in order to demonstrate the useof the formulations presented in their studyRyu et al [13] developed compliant tracklink models and investigated the use of thesemodels in the dynamic analysis of high-speed high-mobility tracked vehicles Thecharacteristics of the compliant elementsused in this investigation to describe thetrack joints are measured experimentally Anumerical integration method having arelatively large stability region is employedin order to maintain the solution accuracyand a variable step size integration algorithmis used in order to improve the efficiencyThe dimensionality problem is solved bydecoupling the equations of motion of thechassis and track subsystems Recursivemethods are used to obtain a minimum set ofequations for the chassis subsystem Severalsimulations scenarios including anaccelerated motion high-speed motionbraking and turning motion of the high-mobility vehicle are tested in order todemonstrate the effectiveness and validity ofthe methods proposed Ozaki and Shabana[9-10] evaluated the performance ofdifferent formulations using a trackedvehicle model that is subjected to impulsiveforces They developed models for jointconstraints and the impulsive contact forcesthat result from the interaction between thetrack chains and the vehicle components aswell as the interaction between these chainsand the ground The nonlinear contact forcemodels used in their numerical study weredeveloped and the formulations of thegeneralized forces associated with the
generalized coordinates used in each of theformulations were presented Ryu et al [14]investigated the nonlinear dynamicmodeling methods for the virtual design oftracked vehicles by using MBS dynamicsimulation techniques The results includehigh oscillatory signals resulting from theimpulsive contact forces and the use of stiffcompliant elements to represent the jointsbetween the track links Each track link ismodeled as a body which has six degrees offreedom and two compliant bushingelements are used to connect track linksEfficient contact search and kinematicsalgorithms in the context of the compliancecontact model are developed to detect theinteractions between track links rollerssprockets and ground for the sake of speedyand robust solutions Rubinstein and Hitron[12] developed a three-dimensional multi-body simulation model for simulating thedynamic behavior of tracked off-roadvehicles using the LMS-DADS simulationprogram Each track link is considered arigid body and is connected to itsneighboring track link via a revolute jointThe road-wheel track-link interaction isdescribed using three-dimensional contactforce elements and the track-link terraininteraction is modeled using a pressure-sinkage relationship
SCOPE AND OBJECTIVES OF THISINVESTIGATION
While some of the formulations used in theanalysis of tracked vehicles require the useof MBS algorithms that are designed forsolving systems of differentialalgebraicequations arising from kinematic jointconstraints other formulations do notrequire the use of such algorithms but usepenalty forces or complaint elements to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 6 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
model the chain dynamics The track linksare subjected to high contact forces thatproduce high stress levels which oftencause damage to the track links during thefunctional operation of the vehicle Theobjective of this paper is to present andcompare between different jointformulations that can be used in the dynamicmodeling of complex tracked vehiclesystems Better understanding of theseformulations can lead to more accurate andpossibly faster computer simulations thatcan be the basis for more reliableperformance evaluation of the vehicles Thetracked vehicles considered in thisinvestigation are assumed to consist ofinterconnected bodies that can have arbitrarydisplacements In the first chain formulationreferred to in this paper as the ideal jointchain model kinematic joints between thetrack links are described using nonlinearconstraint equations that lead to significantreduction in the number of vehicle degreesof freedom This joint model does notrequire assuming stiffness and damping forthe track link connectivity and thereforedoes not allow for flexibility between thetack links it requires however the solutionof a system of differential and algebraicequations if redundant coordinateformulations are used Redundant coordinatealgorithms based on the Lagrangianaugmented form of the equations of motionrequire the use of Newton-Raphson methodin order to ensure that the constraintequations are satisfied at the position levelRecursive and joint variables methods canalso be used instead of redundant coordinateformulations in order to avoid Newton-Raphson algorithm Another approach thatcan be used to enforce the constraintequations at the position level is the penaltymethod This model does not lead to
reduction in the number of the systemdegrees of freedom
Two other approaches that capture the jointcompliance will also be considered in thisstudy The first is the compliant discreteelement method that employs MBS bushingelements to define the connectivity betweenthe track links This approach as in the caseof the penalty method requires assumingstiffness and damping coefficients at theconnection and therefore it allows for theflexibility between the track links In thesecond the compliant continuum-based jointformulation that employs ANCF finiteelements is used This approach whichcaptures new joint deformation modes leadsto linear connectivity conditions which canbe applied at a preprocessing stage allowingfor an efficient elimination of the dependentvariables this leads to a constant inertiamatrix and zero Coriolis and centrifugalforces [18] This approach leads to newtypes of FE chain meshes that have desirablecharacteristics
ALGEBRAIC CONSTRAINTEQUATIONS
In the methods of constrained dynamicsthere are two approaches that are often usedto model ideal mechanical joints that do notaccount for the effect of elasticity anddamping These two methods are theaugmented formulation that employs thetechnique of Lagrange multipliers or therecursive formulation which allows forsystematic elimination of the dependentvariables using the algebraic equationsThese two formulations are briefly discussedin this section
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 6 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
model the chain dynamics The track linksare subjected to high contact forces thatproduce high stress levels which oftencause damage to the track links during thefunctional operation of the vehicle Theobjective of this paper is to present andcompare between different jointformulations that can be used in the dynamicmodeling of complex tracked vehiclesystems Better understanding of theseformulations can lead to more accurate andpossibly faster computer simulations thatcan be the basis for more reliableperformance evaluation of the vehicles Thetracked vehicles considered in thisinvestigation are assumed to consist ofinterconnected bodies that can have arbitrarydisplacements In the first chain formulationreferred to in this paper as the ideal jointchain model kinematic joints between thetrack links are described using nonlinearconstraint equations that lead to significantreduction in the number of vehicle degreesof freedom This joint model does notrequire assuming stiffness and damping forthe track link connectivity and thereforedoes not allow for flexibility between thetack links it requires however the solutionof a system of differential and algebraicequations if redundant coordinateformulations are used Redundant coordinatealgorithms based on the Lagrangianaugmented form of the equations of motionrequire the use of Newton-Raphson methodin order to ensure that the constraintequations are satisfied at the position levelRecursive and joint variables methods canalso be used instead of redundant coordinateformulations in order to avoid Newton-Raphson algorithm Another approach thatcan be used to enforce the constraintequations at the position level is the penaltymethod This model does not lead to
reduction in the number of the systemdegrees of freedom
Two other approaches that capture the jointcompliance will also be considered in thisstudy The first is the compliant discreteelement method that employs MBS bushingelements to define the connectivity betweenthe track links This approach as in the caseof the penalty method requires assumingstiffness and damping coefficients at theconnection and therefore it allows for theflexibility between the track links In thesecond the compliant continuum-based jointformulation that employs ANCF finiteelements is used This approach whichcaptures new joint deformation modes leadsto linear connectivity conditions which canbe applied at a preprocessing stage allowingfor an efficient elimination of the dependentvariables this leads to a constant inertiamatrix and zero Coriolis and centrifugalforces [18] This approach leads to newtypes of FE chain meshes that have desirablecharacteristics
ALGEBRAIC CONSTRAINTEQUATIONS
In the methods of constrained dynamicsthere are two approaches that are often usedto model ideal mechanical joints that do notaccount for the effect of elasticity anddamping These two methods are theaugmented formulation that employs thetechnique of Lagrange multipliers or therecursive formulation which allows forsystematic elimination of the dependentvariables using the algebraic equationsThese two formulations are briefly discussedin this section
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 7 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Augmented Formulation
In the augmented formulation the constraintforces explicitly appear in the dynamicequations which are expressed in terms ofredundant coordinates The constraintrelationships are used with the differentialequations of motion to solve for theunknown accelerations and constraintforces While this approach leads to a sparsematrix structure it has the drawback ofincreasing the problem dimensionality and itrequires more sophisticated numericalalgorithms to solve the resulting system ofdifferential and algebraic equations (DAE)Using the generalized coordinates theequations of motion of a body i can bewritten as [11 15]
iic
ie
iiQQQqM (1)
where iM is the mass matrix of the bodyTi iT iT q R θ is the vector of the
accelerations of the body with iR definingthe body translation and iθ defining thebody orientation i
eQ is the vector of
external forces icQ is the vector of the
constraint forces which can be written interms of Lagrange multipliers λ as
i
i Tc q
Q C λ iqC is the constraint Jacobian
matrix associated with the coordinates ofbody i and i
Q is the vector of the inertia
forces that absorb terms that are quadratic inthe velocities The constraint equations atthe acceleration level can be written as
i
i id
qC q Q where i
dQ is a vector that
absorbs first derivatives of the coordinatesUsing equation (1) with the constraintequations at the acceleration level oneobtains
Te
d
q
q
Q QM C q
QC 0 λ
(2)
The matrices and vectors that appear in thisequation are the system matrices and vectorsthat are obtained by assembling the bodymatrices and vectors The preceding matrixequation which ensures that the constraintequations are satisfied at the accelerationlevel can be solved for the accelerations andLagrange multipliers In order to ensure thatthe algebraic kinematic constraint equationsare satisfied at the position and velocitylevels the independent accelerations iq are
identified and integrated forward in time inorder to determine the independentvelocities iq and independent coordinates
iq Knowing the independent coordinates
from the numerical integration thedependent coordinates dq can be
determined from the nonlinear constraintequations using an iterative Newton-Raphson algorithm that requires the solutionof the system
d d qC q C where dq is
the vector of Newton differences anddqC
is the constraint Jacobian matrix associatedwith the dependent coordinates Knowingthe system coordinates and the independentvelocities the dependent velocities dq can
be determined by solving a linear system ofalgebraic equations that represents theconstraint equations at the velocity levelThis linear system of equations in thevelocities can be written as
d id i t q qC q C q C whereiqC is the
constraint Jacobian matrix associated withthe independent coordinates and
t t C C is the partial derivative of the
constraint functions with respect to time
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 8 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Lagrange multipliers on the other hand canbe used to determine the constraint forcesFor a given joint k the generalizedconstraint forces acting on body i connected by this joint can be obtainedfrom the equation
i
TTi iT iTc k k k kk
qQ C λ F T (3)
where ikF and i
kT are the generalized joint
forces associated respectively with thetranslation and orientation coordinates ofbody i Using the results of equation (3) thereaction forces at the joint definition pointcan be determined using the concept of theequipollent systems of forces
Recursive Formulation
Figure 2 Revolute joint
Another alternate approach for formulatingthe equations of motion of constrainedmechanical systems is the recursive methodwherein the equations of motion areformulated in terms of the joint degrees offreedom This formulation leads to a
minimum set of differential equations fromwhich the workless constraint forces areautomatically eliminated [11 17] Thenumerical procedure used in solving thesedifferential equations is much simpler thanthe procedure used in the solution of themixed system of differential and algebraicequations resulting from the use of theaugmented formulation In the recursiveformulation the equations of motion areformulated in terms of joint degrees offreedom In this formulation the multibodysystem is assumed to consist of subsystemsas in the case of the track chains shown infigure 2 where body j corresponding to
body 1i The absolute coordinates andvelocities of an arbitrary body i in asubsystem are expressed in terms of theindependent joint variables as well as theabsolute coordinates and velocities of body
1i If body i is connected to body 1ithrough a revolute joint which is the case inthis subsystem the relative rotation is theonly degree of freedom represented betweenthe bodies The connectivity between bodiesi and body 1i can then be described usingthe kinematic relationships
1 1 1
1 1
i i i i i iP P
i i i i
R A u R A u 0
ω ω ω(4)
where iR is the global position vector of theorigin of body i iA is the transformationmatrix that defines the body orientation andcan be expressed in terms of Eulerparameters i
Pu and 1iPu are the local
position vectors of point P defined in thecoordinate systems of body i and i-1respectively iω and 1iω are respectivelythe absolute angular velocity vectors ofbodies i and 1i and 1i iω is the angularvelocity vector of body i with respect to
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 9 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
body i-1 which can be defined as 1 1i i i i ω v with 1 1 1i i i v A v where1iv is a unit vector along the axis of
rotation defined in the coordinate system ofbody 1i and i is the angle of relativerotation By differentiating the first equationin equation (4) twice and the second oncewith respect to time one obtains
iiiiiii
iP
iiP
iii
iP
iiP
iii
)()()(
)()(
1111
111111
vωvααuαuωωR
uαuωωR(5)
In this equation kα is the absolute angularacceleration vector of body k Using thekinematic equations obtained in this sectionone can systematically eliminate thedependent variables in order to obtain anumber of differential equations of motionequal to the number of the system degrees offreedom Using this approach one obtains adense inertia matrix in a system of dynamicequations that does not have constraintforces A second alternative approach is touse the kinematic equations developed inthis section to determine all the systemabsolute coordinates and velocities One canthen construct equation (2) which can besolved for the accelerations and Lagrangemultipliers Using the absolute accelerationrelationships of equation (5) one candetermine the relative joint accelerationsThe joint accelerations can be integratedforward in time in order to determine thejoint coordinates and velocities
GENERALIZED FORCES
In defining the joint forces between the tracklinks it is important to understand therelationship and differences between the
generalized and the Cartesian moments [1117] This is important in interpreting thereaction forces of the ideal joints and alsoimportant in the implementation of thepenalty method and bushing elements Let
iF be a force vector that acts at a point iPon a rigid body i If this force vector isassumed to be defined in the globalcoordinate system then the virtual work ofthis force vector can be written as
Ti i ie PW F r where i
Pr can be found
using the virtual change in the positionvector of an arbitrary point on rigid body ias
ii i i iP P i
Rr I A u G
θ (6)
In this equation iA is the transformationmatrix that defines the body orientation i
Pu~
is the skew symmetric matrix associatedwith the vector i
Pu that defines the local
coordinates of the point iP andiG is the
matrix that relates the angular velocity
vectoriω defined in the body coordinate
system to the time derivatives of the
orientation coordinates that isi i iω G θ
Note that sinceTii
Pii
P AuAu~~ equation (6)
can be written as i i i i iP P r R u G θ
Using this equation in the virtual workexpression one obtains
T Ti i i i i i ie PW F R F u G θ which can be
written as
T Ti i i i ie RW F R F θ (7)
where i iR F F and
T Ti i i iP F G u F These
equations imply that a force that acts at anarbitrary point on the rigid body i is
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 10 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
equipollent to another system defined at thereference point that consists of the sameforce and a set of generalized forces defined
byT Ti i i i
P F G u F associated with the
orientation coordinates of the body [11 17]
Since iPu is a skew-symmetric matrix it
follows thatTi i
P P u u Using this identity
one can show that the generalized moment
can be written as ( )Ti i i i
P F G u F wherei i ia P M u F is the Cartesian moment
resulting from the application of the forceiF and iG is the matrix that relates the
angular velocity vector iω defined in theglobal coordinate system to the timederivatives of the orientation coordinatesthat is i i iω G θ It follows that therelationship between the generalized and
Cartesian moment is ia
ii T
MGF If the
components of the moment vector aredefined in the body coordinate system one
has ia
ii T
MGF where ia
iia
T
MAM
Relationships developed in this section willbe used in the formulation of the joint forcesin the case of the penalty method Theserelationships will also be used in thecomputer implementation of the bushingelement in general MBS algorithms
JOINT FORMULATIONS
In this paper four different joint models areconsidered two models are based onalgebraic equations that require the use ofthe methods of constrained dynamics or thepenalty method In the case of constraineddynamics an alternative to the use ofLagrange multipliers is the use of the
recursive methods as previously discussedWhen Lagrange multiplier technique or therecursive methods are used the constraintequations must be satisfied at the positionvelocity and acceleration levels Thepenalty method on the other hand cannotsatisfy the algebraic constraint equations atthe acceleration level
Constraint Equations
The revolute (pin) joint is used in thissection as an example to demonstrate theformulation of the algebraic constraintequations This joint has been used in theliterature in the modeling of the track chainsAs shown in figure 2 the track chain can beassumed to consist of links connected toeach other by a pin joint that allows for therelative rotation between them In generalMBS algorithms the nonlinear algebraicequations that define the pin joint areexpressed in terms of the absolutecoordinates of the two bodies i and jconnected by the joint The five algebraicconstraint equations that eliminate fivedegrees of freedom can be written in termsof the absolute Cartesian coordinates of thetwo bodies as [17]
0rrvrvvvvvqqC T
ijP
ijP
iijP
ijijiji kTTTT
2121)(
(8)
where vi and vj are two vectors definedalong the joint axis on bodies i and j
respectively 1 2 i i iv v v form an orthogonal
triad defined on body i k is a constant
[17] and
ij i j i i i j j jP P P P P r r r R A u R A u (9)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 11 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
In this equation iA and jA are thetransformation matrices that define theorientation of bodies i and j respectivelyand i
Pu and jPu are the local position vectors
of points iP and jP with respect to bodiesi and j respectively Points iP and jP aredefined on the axis of the pin joint on bodiesi and j respectively One can show thatthe Jacobian matrix of the pin jointconstraints is defined as
1 1
2 2
1 1 1
2 2 2
2 2
i j
jT i iT j
jT i iT j
ijT i iT i iT jP P PijT i iT i iT jP P P
ijT i ijT jP P P P
q q q
v H v H
v H v HC C C r H v H v H
r H v H v H
r H r H
(10)
where iqC and jq
C are the constraint
Jacobian matrices associated with thecoordinates of bodies i and j respectivelyand other vectors and matrices that appear inthe preceding equation are
]~[ iiP
iiP
T
GuAIH ]~
[ jjP
jjP
T
GuAIH
)( 11
1ii
ii
ii vA
qqv
H
)( 2
22
iiii
ii vA
qqv
H
j
j j jj j
vH A v
q q
Another alternate approach for formulatingthe revolute joint constraints is to consider itas a special case of the spherical joint inwhich the relative rotation between the twobodies is allowed only along the joint axisIf point P is the joint definition point and
iv and jv are two vectors defined along thejoint axis on bodies i and j respectively
the constraint equations of the revolute jointcan be written as
1 2Ti j ij iT j iT j
P C q q r v v v v 0 The
last two equations in this equation guaranteethat the two vectors iv and jv remainparallel thereby eliminating the freedom ofthe relative rotation between the two bodiesin two perpendicular directions
Penalty Method
The constraint equations that describe theconnectivity between the track links can beenforced using the penalty approach In thiscase these algebraic equations are notsatisfied at the acceleration level Thepenalty method does not lead to eliminationof degrees of freedom and therefore it isconceptually different from the case ofLagrange multiplier technique or therecursive approach In order to demonstratethe penalty approach the violations in theconstraint equations of a revolute joint kcan be written as
1 2
Tij iT j iT jk P d r v v v v (11)
Using this violation kd a restoring force
vector can then be defined as
k k k kkk c f d d where kk and kc are
assumed penalty stiffness and dampingcoefficients respectively and kd is the time
derivative of the violation vector kd The
virtual work of this restoring force kf can
then be written as ij Tk k kW f d which
can be written as
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 12 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
)()( 2211jijiij
PTB
ijk
TT
FFW vvvvrF (12)
whereij i i i i j j j jp B B r R u G θ R u G θ
ij ijB k p k pk c F r r 1 1 1( )iT j jT i iT j v v v v v v
2 2 2( )i T j jT i i T j v v v v v v
1
1 1
iT j
iT jk k
dF k c
dt
v vv v and
2
2 2
iT j
iT jk k
dF k c
dt
v vv v
Equation (12) can be used to define a set ofgeneralized forces acting on bodies i and jthat maintain the connectivity between thetwo bodies as
jjjjR
iiiiR
ijk
TTTT
W QRQQRQ (13)
Which can be rewritten in a compact form asi T i j T jB BW Q q Q q where
iq andjq
are the generalized coordinates of bodies i
and j and
1 2
1 2
iBi R
B iT i T iT i iT iiB B
jBj R
B jT j T jT i jT ijB B
FQQ
G u F G M G MQ
FQQ
G u F G M G MQ
(14)
where 1 1 1i i jF M v v 1 1 1
j i jFM v v
2 1 2i i jF M v v and 2 1 2
j i jFM v v
Equation (14) defines the generalized forcesassociated with the absolute Cartesiancoordinates due to the revolute jointconnection between bodies i and j With a
proper selection of the penalty coefficientsthese forces ensure that the constraintequations are satisfied at the position level
COMPLIANT DISCRETE ELEMENTJOINT FORMULATION
Figure 3 Bushing element
The compliant discrete element jointformulation allows for introducing jointdeformations In this approach no algebraicequations are enforced In most MBScomputer codes the compliant discreteelement joint method can be applied usingthe standard MBS bushing element thatallows for introducing three force and threemoment components that can be linear ornonlinear functions of the body coordinatesAs shown in figure 3 the position vectors
jP1
u and jP2
u of two points jP1 and jP2 on
body j can be used to define one axis of thecoordinate system of the bushing element as
1 2 1 2
j j j j jp p p p n u u u u where jn is
one of the bushing axes defined in the bodyj coordinate system This axis can then be
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 13 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
defined in the global coordinate system asjjj nAn where jA is the transformation
matrix that defines the orientation of thecoordinate system of body j in the globalsystem Using this axis one can define thedirectional properties of the bushing elementwith the other two axes of the bushingcoordinate system being defined using the
transformation matrix 1 2bj j j j A t t n
where j1t and j
2t are the two unit vectorsthat complete the three orthogonal axes ofthe bushing element coordinate systemAssuming that body j is a rigid body thebushing coordinate system can be definedwith respect to the global coordinate systemas bjjbj AAA Choosing points iP and
jP1 to initially coincide one can define thebushing deformation and rate of deformationvectors in the bushing coordinate system as
ijbjbij T
rAδ and ijbjbij T
rAδ respectively where
1
ij i jP P r r r is the
position vector of point 1jP with respect to
point iP
The rotational deformation of the bushingelement can be obtained using thetransformation matrix that defines theorientation of the bushing coordinate systemon body i with respect to the bushingcoordinate system on body j This matrix is
defined as bibjbij T
AAA where bjA is theorientation matrix of the bushing coordinatesystem on body j while biA is theorientation matrix of the bushing coordinatesystem with respect to the coordinate systemof body i that is defined as biibi AAA Assuming that the relative rotations betweenbodies i and j are small the relative
rotation matrix bijA can be used to extract
three relative rotations defined in thebushing coordinate system
Tbij bij bij bijx y zθ θ θ θ The relative
angular velocity between the two bodiesdefined in the bushing coordinate system
can also be written as ( )Tbij bj i j ω A ω ω
where iω and jω are the absolute angularvelocity vectors of bodies i and j respectively defined in the globalcoordinate system The bushing stiffness anddamping coefficients are often determinedusing experimental testing and thesecoefficients are defined generally in thebushing coordinate system Let rK and rCbe the translational stiffness and dampingmatrices respectively defined with respectto the bushing coordinate system andassume that the rotational stiffness anddamping matrices are K and C
respectively In terms of translational androtational stiffness and damping matricesthe force vector defined in the bushingcoordinate system can be written as
bij
bijr
bij
bijr
b
bR
ωδ
C0
0C
θδ
K0
0K
M
F
(15)
This force vector can then be defined in theglobal coordinate system and the results canbe used to define the generalized bushingforces and moments acting on the twobodies as previously described in this paper
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 14 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
COMPLIANT CONTINUUM-BASEDJOINT FORMULATION
Figure 4 ANCF beam element coordinates
The compliant continuum-based jointformulation allows capturing joint strainmodes that cannot be captured using thecompliant discrete element joint methodWhen ANCF finite elements are used onecan develop new FE meshes that have linearconnectivity and constant inertia [18] Thisallows for systematically eliminatingdependent variables at a preprocessing stageand as a result there is no need for the useof joint formulations in the main processorThis approach can be used to develop newspatial chain models where the modes ofdeformations at the definition points of thejoints that allow for rigid body rotationsbetween ANCF finite elements can becaptured The displacement field of anANCF finite element as the one shown infigure 4 can be written as
( ) ( ) ( )x y z t x y z tr s e where x y andz are the element spatial coordinates t istime S is the element shape functionmatrix and e is the vector of element nodalcoordinates Using this displacement field
the equations of a pin joint betweenelements i and j can be written using the
six scalar equations i j i j r r r r where
is the coordinate line that defines thejoint axis can be x y or z or any othercoordinate line The six scalar equationseliminate six degrees of freedom threetranslations two rotations and onedeformation mode Therefore this joint hasfive modes of deformation that includestretch and shear modes This ANCFrevolute joint model ensures 1C continuitywith respect to the coordinate line and
0C continuity with respect to the other twoparameters It follows that the Lagrangian
strain component 1 2T r r is
continuous at the joint definition pointwhile the other five strain components canbe discontinuous The resulting jointconstraint equations are linear andtherefore can be applied at a preprocessingstage to systematically eliminate thedependent variables Using these equationsone can develop a new kinematically linearFE mesh for flexible-link chains in whichthe links can have arbitrarily large relativerotations
The comparative numerical study presentedin the following section will be focused onthree models the ideal constrained jointmodel the ideal penalty joint model and thecompliant discrete element model (bushing)The results of the ANCF joint model will beconsidered in future investigations in orderto allow for presenting a more meaningfulstudy that compares different ANCF jointformulations
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 15 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SIMULATION RESULTS
Figure 5 Tracked vehicle different contactmodels
Figure 6 Suspension system layout ofM113 tracked vehicle [6]
In this section numerical results obtainedusing M113 tracked vehicle model shown infigure 1 are used to compare the differentjoint formulations presented in thisinvestigation The M113 tracked vehicle isarmored personnel carrier that consists of achassis idler sprocket 5 road-wheels and64 track links on each track side (right andleft) Figure 5 shows the engagement of thetrack links with some of the vehicle
components while more details about theroller arrangement and the configuration ofthe suspension system of the M113 trackedvehicle model are shown in figure 6 Table 1shows the inertia prosperities for all thetracked vehicle model components used inthis simulation More specifications of thisvehicle can be obtained from open sources[5] The vehicle has a suspension systemthat consists of road arms placed betweenthe road wheels and chassis as well as shockabsorbers connected to each road arm Table2 shows the stiffness and the dampingcoefficients of the contact models as well astheir friction coefficients
In this study two different simulationscenarios one with the suspension systemand the other without the suspension systemwill be considered to study the effect ofusing the suspension system on the resultsThe road arms and the sprockets areconnected to the chassis by revolute jointsand the road arms are connected to the road-wheels by revolute joints The track links areconnected to each other using revolutejoints which can be modeled using thepenalty method bushing element or ANCFfinite elements as previously mentionedTensioners are added to the system byconnecting each idler to a tensioner with arevolute joint and connecting the tensionerto the chassis with a prismatic joint to ensureonly translation between them
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 16 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 7 Sprocket angular velocity
The angular velocities of the sprockets ofthe vehicle model considered in thisnumerical investigation are assumed toincrease linearly after 1 sec until it reaches aconstant value of 25 radsec after 8 secondsas shown in figure 7 Figure 8 shows thechassis vertical displacement using the jointmodel with and without the suspensionsystem The results presented in this figureshow that the model with a suspensionsystem has less vibration compared to themodel without suspension
The penalty method model and bushingelement model shown in figures 9-14 eachhave a stiffness coefficient of 109 Nm Inreal life applications the stiffness coefficientof bushing elements used in track chainconnections are much lower they areincreased in this case for better comparisonsto the revolute joint and penalty models Therotational stiffness and damping coefficientsabout the axis of rotation for the track linksof the bushing element model are set to zeroin this case to allow for rotation about thelateral axis Figures 9 and 10 showrespectively the chassis forward position
and velocity results obtained using differentjoint models While the results presented inthese figures show good agreement thecomputational time varies when thesedifferent models are used The constrainedjoint model takes less computational timecompared to the penalty and the bushingelement models the penalty model CPUtime is twice that of the constraint modelCPU time while the bushing model CPUtime is four times that of the constraintmodel CPU time This increase in thebushing model CPU time is attributed to thehigh stiffness coefficients used in thismodel
Figure 8 Chassis vertical displacement
(--- without suspension withsuspension)
0 1 2 3 4 5 6 7 8 9 10-30
-25
-20
-15
-10
-5
0
5A
ng
ula
r V
elo
city
(ra
ds
)
Time (s)
0 1 2 3 4 5 6 7 8 9 101067
1068
1069
1070
1071
1072
1073
1074V
erti
cal
Posi
tion (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 17 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 9 Chassis forward position
( Constrained joint modelPenalty method model Bushing element
model)
Figure 10 Chassis forward velocity
( Constrained joint modelPenalty method model Bushing element
model)
Figure 11 shows the vertical displacement ofa track link in the global coordinate systemusing different joint models While theresults show good agreement the joint modelhas less vibration compared to the penaltyand bushing element models Figure 12shows the motion trajectory of a track link inthe chassis coordinate system using theconstrained model the penalty model andthe bushing element model respectivelyWhile the results presented in these figuresshow good agreement it is clear that theconstrained dynamics model solutionexhibits less oscillations
Figure 11 Vertical displacement of a tracklink
( Constrained joint modelPenalty method model Bushing element
model)
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35F
orw
ard P
osi
tion (
m)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
For
war
d V
eloc
ity
(ms
)
Time (s)
0 1 2 3 4 5 6 7 8 9 1000
02
04
06
08
10
Ver
tica
l P
osit
ion
(m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 18 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 12 Trajectory motion of a track linkin the chassis coordinate system
( Constrained joint model --- Penaltymethod model Bushing element model)
Figures 13 - 16 show the joint forces in thelongitudinal and the vertical directionsrespectively obtained using the constrainedand penalty joint models The penalty resultsare obtained using a stiffness coefficient of
91 10 Nm and damping coefficient of45 10 Nsm The results show good
agreement between the constrained andpenalty joint models Figures 15 and 16show the same results in the case of astiffness coefficient of 71 10 Nm anddamping coefficient of 45 10 Nsm
Figure 13 Joint longitudinal forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
Figure 14 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 91 10 Nm)
-3 -2 -1 0 1 2 3-15
-10
-05
00
05
10
15L
oca
l Z
-Po
siti
on
(V
erti
cal
m)
Local Y-Position (Longitudinal m)0 1 2 3 4 5 6 7 8 9 10
-60000
-40000
-20000
0
20000
40000
60000
Fo
rce
(N)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 19 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Figure 15 Joint Longitudinal forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
Figure 16 Joint vertical forces
( Constrained joint model --- Penaltymethod model k = 71 10 Nm)
The results of figures 15 and 16 whichshow significant differences between thetwo models demonstrate the drawback ofthe penalty method when the penaltystiffness coefficient is reduced Similarresults can be expected in the case of thebushing element models where the forcesobtained also depend on the stiffness anddamping coefficient of the joint Figure 17shows the joint deformation predicted usingthe penalty model using different stiffnesscoefficients The penalty model with astiffness coefficient of 91 10 Nm showsmuch less deformation less than 006 mmwhile the penalty model with a stiffness of
71 10 Nm has much more deformationover 25 mm between the track links
Figure 17 Joint deformation using penaltymodel
( k = 91 10 Nm --- k = 71 10 Nm)
0 1 2 3 4 5 6 7 8 9 10-60000
-40000
-20000
0
20000
40000
60000F
orc
e (N
)
Time (s)
0 1 2 3 4 5 6 7 8 9 10-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
Fo
rce
(N)
Time (s)0 1 2 3 4 5 6 7 8 9 10
00000
00005
00010
00015
00020
00025
Join
t D
eform
atio
n (
m)
Time (s)
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 20 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
SUMMARY AND CONCLUSIONS
In this investigation different MBS jointformulations are presented and comparedusing detailed tracked vehicle models Threemain joint formulations are discussed theyare the ideal joint formulation the compliantdiscrete element joint formulation and thecompliant continuum-based jointformulation The ideal joint formulation isdeveloped to eliminate the relativedisplacement between the two bodiesconnected by the joint This can be achievedby enforcing a set of joint algebraicequations using a constrained dynamicsapproach or by using the penalty methodThe constrained dynamics approacheliminates degrees of freedom and ensuresthat the constraint equations are satisfied atthe position velocity and accelerationlevels The penalty method on the otherhand does not reduce the number of degreesof freedom and ensures that the constraintequations are satisfied at the position levelonly provided that a high stiffnesscoefficient is used The compliant discreteelement formulation which allows for jointdeformations can be systematically appliedusing a standard MBS bushing element thatallows for six degrees of freedom of relativemotion The compliant continuum-basedapproach can be used to develop new jointsthat capture deformation modes that are notcaptured by the compliant discrete elementjoint formulation ANCF finite elements canbe used to systematically develop new jointswith distributed elasticity and linearconnectivity conditions As discussed in thispaper it is important to choose the properstiffness and damping coefficients when thepenalty method and the bushing elementsare used
Numerical results were presented in order tocompare between different methods Theideal joint formulation produces the desiredjoint kinematics and accurate joint forcesThe same is true with the penalty forcebased joint when large penalty stiffnessesare used Penalty force based jointconstruction has been shown to be sensitiveto the selection of penalty stiffness with thehigher stiffness coefficients leading to betteroverall results However higher penaltystiffness increases CPU time significantlydue to higher frequencies The penaltymethod and bushing element models eachhave much larger CPU times than the idealconstrained model due to these high stiffnesscoefficients Bushing force based jointformulation when used with very largestiffnesses has been shown to notautomatically equate to the penalty forcebased joint model The ANCF jointformulation is being implemented and willbe compared with the previous models infuture work
Acknowledgment
This research was supported by the USArmy Tank-Automotive ResearchDevelopment and Engineering Center(TARDEC) (Contract No W911NF-07-D-0001)
REFERENCES
[1] Bando K Yoshida K and HoriK 1991 The development of therubber track for small sizebulldozers SAE Technical Paper911854 doi 104271911854Milwaukee WI
[2] Choi J H Lee H C and ShabanaA A 1998 ldquoSpatial Dynamics ofMultibody Tracked Vehiclesrdquo
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 21 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
Vehicle System Dynamics Vol 29pp 27ndash49
[3] Galaitsis A G 1984 A Model forPredicting Dynamic Track Loads inMilitaryVehiclesrdquo Transactions of theASME Journal of VibrationAcoustics Stress and Reliability inDesign Vol 106 pp 286-291
[4] Hamed M A Shabana A AJayakumar P and Letherwood MD 2011 ldquoNonstructural geometricdiscontinuities in finiteelementmultibody system analysisrdquoNonlinear Dynamics Vol 66 pp809ndash824
[5] ldquoM113rdquo Image A Troop 412 CAV2003 Web 11 July 2012lthttpwwwatroop412cavcomtoolsACAVimagesM113-drawinggifgt
[6] ldquoM113 Vehicle Family RubberTrack Installation InstructionsrdquoLithorsquod in Canada 2003 Web 16July 2012ltwwwcombatreformorgSoucyBandTrackInstallationA-654RBpdfgt
[7] Murray M and Canfield T R1992 Modeling of a flexible linkpower transmission systemProceedings of the 6th ASMEInternational Power Transmissionand Gearing Conference ScottsdaleArizona
[8] Nakanishi T and Shabana A A1994 ldquoThe Use of RecursiveMethods in the Dynamic Analysis ofTracked Vehiclesrdquo Technical ReportKMTR-92-002 Department ofMechanical Engineering Universityof Illinois at Chicago Chicago
[9] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part I Methodsof Constrained Dynamicsrdquo Journal
of Multi-Scale ComputationalEngineering Vol 1 pp 235-252
[10] Ozaki T and Shabana A A 2003ldquoTreatment of Constraints inMultibody Systems Part IIApplication to Tracked VehiclesrdquoJournal of Multi-ScaleComputational Engineering Vol 1pp 253-276
[11] Roberson R E and SchertassekRichard 1988 Dynamics ofMultibody Systems Springer-VerlagBerlin
[12] Rubinstein D Hitron R 2004 ldquoAdetailed multi-body model fordynamic simulation of off-roadtracked vehiclesrdquo Journal ofTerramechanics Vol 41 pp 163ndash173
[13] Ryu H S Bae D S Choi J Hand Shabana A A 2000 ldquoAcompliant track link model for high-speed high-mobility trackedvehiclesrdquo International Journal forNumerical Methods in EngineeringVol 48 pp 1481-1502
[14] Ryu H S Huh K S Bae D Sand Choi J H 2003 ldquoDevelopmentof a Multibody Dynamics SimulationTool for Tracked Vehicles Part IEfficient Contact and NonlinearDynamics Modelingrdquo JSMEInternational Journal 46(2) pp540-549
[15] Shabana A A Zaazaa K E andSugiyama Hiroyuki 2008 RailroadVehicle Dynamics A ComputationalApproach Taylor amp FrancisCRCBoca Raton Florida
[16] Shabana A A 2008Computational ContinuumMechanics Cambridge UniversityPress Cambridge
Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300

Proceedings of the 2012 Ground Vehicle Systems Engineering and Technology Symposium (GVSETS)
Page 22 of 22
CHAIN DYNAMIC FORMULATIONS FOR MULTIBODY SYSTEM TRACKED VEHICLES
UNCLASSIFIED
[17] Shabana A A 2010Computational Dynamics ThirdEdition John Wiley and Sons NewYork
[18] Shabana A A Hamed A MMohamed A A Jayakumar P andLetherwood M D 2012 ldquoUse of B-Spline in the Finite ElementAnalysis Comparison with ANCFGeometryrdquo Journal of
Computational and NonlinearDynamics Vol 7 pp 81-88
[19] Yakoub R Y and Shabana A A2001 ldquoThree Dimensional AbsoluteNodal Coordinate Formulation forBeam Elements Implementation andApplicationrdquo ASME Journal forMechanical Design Vol 123 pp614ndash621
Table 1 Mass and inertia values for tracked vehicle parts
Part Mass (kg) IXX ( kgm2) IYY ( kgm2) IZZ ( kgm2) IXY IYZ IXZ (kgm2)
Chassis 54892 17869 10450 10721 0
Sprocket 43667 13868 12216 12216 0
Idler 42957 14698 12545 12545 0
Road Wheel 56107 26063 19819 19819 0
Road Arm 28016 030241 016252 018809 0
Track Link 39948 0091164 049787 055977 0
Table 2 Contact Parameters
Parameters Sprocket-Track Contact Roller-Track Contact Ground-Track Contact
k 200times106 Nm 200times106 Nm 200times106 Nm
c 500times103 Nsm 500times103 Nsm 500times103 Nsm
μ 0150 0100 0300