-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
1/57
OPTIMAL CONTROL
Chapter_1 Static Optimization
1.1 Optimization Without Constraints, 11.2 Optimization With
Equality Constraints, 5
1.3 Numerical Solution Methos, 21
!asics " 2,3#$%lots
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
2/57
The goals of this course are to epose the stu!ents to the
mathematical tools ofparametric an! !"namic optimization an! their
uses in !esigning optimall"#eha$ing !"namic s"stems% The nonlinear
s"stems course co$ers the follo&ingtopics'1. Static
Optimization
2.& Optimal Control o' #iscrete$(ime Systems
2.1 )inear *uaratic +eulator
2.2 Steay$State Close$loop Control o' Su-$Optimal ee-ac/
2.3 (he (rac/in %ro-lem
2.0 +eulator ith unction o' inal State ie
3.& Optimal Control o' Continuous$(ime Systems
3.1 )inear *uaratic +eulator
3.2 Steay$State Close$loop Control o' Su-$Optimal ee-ac/
3.3 (he (rac/in %ro-lem3.0 +eulator ith unction o' inal State
ie
3.5 inal$(ime$ree %ro-lem
3. Constraine 4nput %ro-lem
0.& #ynamic %rorammin0.1 #iscrete$(ime
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
3/57
4ntrouctionThe state fee!#ac( an! o#ser$er !esign approach is a
fun!amental tool in thecontrol of state e)uation s"stems%
*o&e$er+ it is not al&a"s the most usefulmetho!% Three
o#$ious !ifficulties are'
, The translation from !esign specifications -maimum !esire!o$er
an! un!ershoot+ settling time+ etc%. to !esire! poles is
notal&a"s !irect+ particularl" for comple s"stems/ &hat is
the #estpole configuration for the gi$en specifications0, In MIMO
s"stems the state fee!#ac( gains that achie$e a gi$enpole
configuration is not uni)ue% hat is the #est 2 for a gi$enpole
configuration0, The eigen$alues of the o#ser$er shoul! #e chosen
faster than
those of the close!3loop s"stem% Is there an" other
criteriona$aila#le to help !eci!e one configuration o$er
another0
The metho!s that &e &ill no& intro!uce gi$e
ans&ers to these
)uestions% e &ill see ho& the state fee!#ac( an!
o#ser$er gainscan #e 'oun in an optimal ay.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
4/57
(he !asic Optimal Control %ro-lem
hat !oes optimal mean0 Optimal means !oing a 4o# in the
#estpossi#le &a"% *o&e$er+ #efore starting a search for an
optimalsolution+
, theo-must #e !efine!, a mathematical scale must #e esta#lishe!
to )uantif" &hat
&e mean #" -est, the possi-lealternati$es must #e spelle!
out%
5nless these )ualifiers are clear an! consistent+ a claim that
as"stem is optimal is reall" meaningless%
A cru!e+ inaccurate s"stem might #e consi!ere! optimal #ecauseit
is inepensi$e+ is eas" to fa#ricate+ an! gi$es
a!e)uateperformance%
Con$ersel"+ a $er" precise an! elegant s"stem coul! #e
re4ecte!as non3optimal #ecause it is too epensi$e or it is too
hea$" or
&oul! ta(e too long to !e$elop%
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
5/57
6urther+ the control as &ell as the state $aria#les are
generall"su#4ect to constraints+ &hich ma(e man" pro#lems in
optimal
control non3classical+ since pro#lems &ith path constraints
canhar!l" #e han!le! in the classical calculus of $ariations%
That is+ the pro#lem of optimal control can then #e state!
as'7etermine the control signals that &ill cause a s"stem to
satisf"the ph"sical constraints an!+ at the same time+ minimize
-ormaimize. some performance criterion%%
7espite its successes+ ho&e$er+ optimal control theor" is #"
nomeans complete+ especiall" &hen it comes to the )uestion
of&hether an optimal control eists for a gi$en pro#lems%
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
6/57
S(6(4C 7E+S8S #9N6M4C O%(4M4:6(4ON;
Optimization < is the process o' minimizin ormaimizing the
costs8#enefits of some action%
Static Optimization < re'ers to the process o'
minimizing or maimizing the costs8#enefits of some
o#4ecti$efunction for one instant in time onl"%
#ynamic Optimization < re'ers to the process o'
minimizing or maimizing the costs8#enefits of some o#4ecti$e
function o$er a perio! of time% Sometimes calle! optimal
control%
In #oth cases e)ualit" an! ine)ualit" constraints can #e
enforce!%
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
7/57
1% Static Optimization is concerne! &ith controlling a
plantun!er stea!" state con!itions+ i%e%+ the s"stem $aria#les are
not
changing &ith respect to time% The plant is then !escri#e!
#"alge#raic e)uations% Techni)ues use! are or!inar"
calculus+Lagrange multipliers+ linear an! nonlinear
programming%
9% 7"namic Optimization concerns &ith the optimal control
ofplants un!er !"namic con!itions+ i%e%+ the s"stem $aria#les
arechanging &ith respect to time an! thus the time is in$ol$e!
ins"stem !escription% Then the plant is !escri#e! #" !ifferential
-or!ifference. e)uations% Techni)ues use! are search
techni)ues+!"namic programming an! $ariational calculus%
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
8/57
Static Optimization #ynamic Optimization
Optimal state+ :+ an! control
+u:+ are fie!+ i%e%+ the" !o notchange o$er time -for oneinstant
in time onl".
; Optimal state an! control $ar"
o$er time -o$er a perio! oftime.% Some times calle!optimal
control%
,
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
9/57
1.1 Optimization Without Constraint
, Pro#lem' ; A scalarperformance index L-u. is gi$en that is
afunction of a control or decision vector u; e &ant to'
Min )>u?
, Solution' L-u du . = L-u. dL (increment)
3Ta"lor epansion to 9nd or!er in !u
&ith gra!ient $ector Luan! cur$ature matri Luu
3Stationar" point u:0
dL = B to1st or!er term for ar#itrar" du
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
10/57
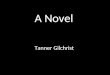
The eponential function -in #lue.+ an! the sum of thefirst n1
terms of its Ta"lor series at B -in re!.%
(aylor seriesis a representation of afunction as an infinite
sum of terms calculate!from the $alues of its!eri$ati$es at a
singlepoint%
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
11/57
(aylor series
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
12/57
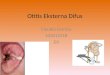
Plot of f-x. = sin-9x. from 8D to E8D/ note fFs secon!
!eri$ati$eis f-x. = ;Dsin-9x.% Tangent is #lue &here cur$e is
conca$e up-a#o$e its o&n tangent.+ green &here conca$e
!o&n -#elo& itstangent.+ an! re!at inflection points' B+ 89
an!
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
13/57
http://mathforum.org/mathimages/index.php/Image:Taylor_Main.gif
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
14/57
G
!t!
http://mathforum.org/mathimages/index.php/Image:TwoApproximations.gifhttp://mathforum.org/mathimages/index.php/Image:TwoApproximations.gifhttp://mathforum.org/mathimages/index.php/Image:TwoApproximations.gifhttp://mathforum.org/mathimages/index.php/Image:Taylor_Main.gifhttp://en.wikipedia.org/wiki/File:Animated_illustration_of_inflection_point.gif
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
15/57
, Hraphical Interpretation of solution
http://en.wikipedia.org/wiki/File:Animated_illustration_of_inflection_point.gifhttp://en.wikipedia.org/wiki/File:Animated_illustration_of_inflection_point.gif
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
16/57
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
17/57
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
18/57
A !iti f : t # i i f J- :. B ll !
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
19/57
, A necessar" con!ition for : to #e a maimum is f J-:. = B+
calle!such an : a critical point%
, A sufficient con!itionfor : to #e a maimum is that it is a
critical
point an! f JJ-:. K B %
That is+ if : satisfies #oth e)uations+ then it must #e a
maimum%The con!ition is also calle! a secon!3or!er con!ition%
The height of the function at a isgreater than -or e)ual to. the
heightan"&here else in that inter$al%
Or+ more #riefl"' f-a. f-. for all inthe inter$al In other
&or!s+ there isno height greater than f-a.%
Note' f-a. shoul! #e insi!e theinter$al+ not at one en! or the
other%
C t
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
20/57
Comments', f ma" ha$e man" critical points% The sufficient
con!itions helpsus pic( the maimum out of the set of all critical
points%, oth con!itions onl" esta#lish that : is a local ma% That
is+
there is no point close to : that has a higher f3$alue% ut
therema" #e other points not close to : that !o% In that case
theremust #e multiple points fulfilling #oth con!itions an! &e
simpl"calculate &hich of these has the highest f3$alue%
, If f is strictl" conca$e+ there is onl" one critical point an!
thismust #e the glo#al ma% The reason is that f JJ-. K B
e$er"&here-that is &hat it means to #e strictl" conca$e.%
Thus+ there can onl"#e one point &here f J-. = B an! that
satisfies the sufficientcon!ition automaticall"%
@ l Th f ti http 88en i(ipe!ia org8 i(i8Ma ima an! minima
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
21/57
@amples' The function
, 9has a uni)ue glo#al minimum at = B%, has no glo#al minima or
maima% Although the first!eri$ati$e -9. is B at = B+ this is an
inflection point%,
has a uni)ue glo#al maimum at = e figure%, 3has a uni)ue glo#al
maimum o$er the positi$e realnum#ers at = 18e%, 8 has first
!eri$ati$e 9 1 an! secon! !eri$ati$e 9%
Setting the first !eri$ati$e to B an! sol$ing for
gi$esstationar" points at 1 an! 1% 6rom the sign of the
secon!!eri$ati$e &e can see that 1 is a local maimum an! 1
is
a local minimum% Note that this function has no glo#almaimum or
minimum%
http'88en%&i(ipe!ia%org8&i(i8Maima_an!_minima
C t l Th 6 ti
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
22/57
Cont% eamples' The 6unction, QQ has a glo#al minimum at =B that
cannot #e foun! #"ta(ing !eri$ati$es+ #ecause the !eri$ati$e !oes
not eist at =B%, cos-.has infinitel" man" glo#al maima at B+ 9+ D+
+
an! infinitel" man" glo#al minima at + + %, 9 cos-. has
infinitel" man" local maima an! minima+ #ut
no glo#al maimum or minimum%, cos-.8 &ith B%11%1 has a
glo#al maimum at
=B%1 -a #oun!ar".+ a glo#al minimum near =B%+ a localmaimum near
= B%U+ an! a local minimum near =1%B%
, 991 !efine! o$er the close! inter$al -segment.>D+9? has a
local maimum at = 1VEW+ a local
minimum at = 1VEW+ a glo#al maimum at = 9 an! a glo#al
minimum at = D%
C t
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
23/57
The #ottom part of the !iagram sho&s some contour lines
&ith astraight line running through the location of the maimum
$alue%The cur$e at the top represents the $alues along that
straight line
hen the lines areclose together themagnitu!e of thegra!ient is
large' the$ariation is steep%
Contour
Contour
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
24/57
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
25/57
Minimize an A#solute Criterion
http://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svg
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
26/57
Minimize an A#solute Criterion
, Achie$e a specific o#4ecti$e; Minimum time; Minimum fuel
; Minimum financial cost, to achie$e a goal
6or a continuous3time linear s"stem+ !efine! on + !escri#e!
#"
&ith a )ua!ratic cost function !efine! as
http://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svghttp://en.wikipedia.org/wiki/File:Courbe_niveau.svg
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
27/57
@ample
Slope #ecomes gra!ient $ector'
http://en.wikipedia.org/wiki/File:Singularptfn.JPGhttp://en.wikipedia.org/wiki/Partial_derivativehttp://en.wikipedia.org/wiki/Differential_calculus
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
28/57
3Slope #ecomes gra!ient $ector'
3 9n! or!er !eri$ati$e #ecomes *essian -or cur$ature matri.'
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
29/57
, 6urther @tension' $ector function of $ector
3 SlopeY of '-u. &ith respect to u is a
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
30/57
3Meaning of matri LuuZB or KB0
& positi$e !efinite -&$%. if x#&x K B x [ B
& negati$e !efinite -&'%. if
& positi$e semi!efinite -& B. ifx#&x B x [ B
& in!efinite ifx#&x Z B for somex [ B an!x#&x K B
for somex [ B
& negati$e semi!efinite -& B. ifx#&x B x [ B
-Appen!i A%.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
31/57
3Testing Positi$e8Negati$e 7efinitenessMetho! 31% " @igen$alues
]iof &
& positi$e !efinite -&$%. if all Z B+ i =1+L+n ]
& negati$e !efinite -&'%. if - B. if all B+ i 1+ + n
& positi$esemi!efinite & ]i = L
B an! some B+ i 1+ +n i L = K Z ] ] i & in!efinite if
some& negati$e semi!efinitex#&x Z B x [ B
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
32/57
Metho! 39% " 7eterminant
: Testing positi$e8negati$e3!efinitenessO#tain lea!ing minors
of
&'
, Testing semi3positi$e8negati$e3!efiniteness ' O#tain
Principal
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
33/57
,Testing semi3positi$e8negati$e3!efiniteness ' O#tain
Principalminor of &'
* & is in!efinite if none of the a#o$e cases are
satisfie!
Some sef l Matri Calc l s form la -Appen!i A D.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
34/57
, Some useful Matri Calculus formula -Appen!i A%D.
, If & is s"mmetric
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
35/57
, If & is s"mmetric
; Some useful *essians
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
36/57
Some useful *essians
, If & is s"mmetric
I : 8 i i t f L( ) 0
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
37/57
3Is u: ma8min point of L(u) 0
dL at stationar" point u* ecomes
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
38/57
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
39/57
; Optimize! $alue of performance in!e'
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
40/57
: Stationar" point
Plug in the a#o$e e)uation
Example 1.1-2: Optimization by Scalar Manipulations
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
41/57
e ha$e !iscusse! optimization in terms of $ectors an! the
gra!ient% As an alternati$eapproach+ &e coul! !eal entirel" in
terms of scalar )uantities%
6in! L-1+31. 0
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
42/57
efore start
section 1%9
*o& to !ra&mesh+ contoursplots
G an! ^ arra"s for 37 plots
G an! ^ arra"s for 37 plots
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
43/57
f -+". = 9 "9% Then an eas" calculation sho&s that f -9+ 1.
= E%Therefore+ -9+ 1+ E. is an or!ere! triple that lies on the
graph of f %This point is sho&n in 6igure%
6igure Point -9+ 1+ E. is on the graph of f %To plot the graph
of f -. = 9in the plane+ &e #egin #" ma(ing ata#le of points
that satisf" the e)uation+ as sho&n in Ta#le
Ta#le A ta#le of points satisf"ing f (x) " x+
transforms the !omain specifie! #" $ectors an! " into arra"s
Gan! ^ that can #e use! for the e$aluation of functions of
t&o$aria#les an! 37 surface plots
6or creating a ta#le of points that satisf" the e)uation f -+".
= 9 "9% Matla#
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
44/57
Outputis easil" un!erstoo! if one superimposes the matri ^ onto
the matri G to o#taina gri! of or!ere! pairs%
g p " ) - ". "accomplishes this &ith the meshgri! comman!%ZZ
>G+^?=meshgri!->1+9++D+E?.
Therefore+ Ta#le contains a set of points in the plane that
&e &ill su#stitute into thefunction f (x,y) " xy+ Matla#Fs
arra" smart operators ma(e this an eas" proposition%
The ro&s of the output arra" G are copies of the $ector an!
the columns of the outputarra" ^ are copies of the $ector "%
ZZ >G+^?=meshgri!->1+9++D+E?.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
45/57
ZZ =G%`9 % 9
It is no& an eas" tas( to plot the surface to &hich
these points #elong%
ZZ mesh-G+^+.
6igure ' Plotting the surfacef (x,y) "x y+
ZZ =3'
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
46/57
= 3 39 31 B 1 9
ZZ "=3'" = 3 39 31 B 1 9
ZZ >G+^?=meshgri!-+".
ZZ =G%`9 % 9
ZZ mesh-G+^+.
1
1
1
1
The surface - " x y on t.e domain
The plot of z = x2+ y2.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
47/57
ZZ =3'%9'/ZZ "=3'%9'/ZZ >G+^?=meshgri!-+"./ZZ =G%b9^%b9/
ZZ mesh-G+ +.ZZ la#el-3aisF.ZZ "la#el-"3aisF.ZZ zla#el-z3aisF.ZZ
title-The plot of z = b9 "b9%F.
-4
-2
02
4
-4
-2
0
2
40
5
10
15
20
x-axisy-axis
z-axis
close all1 1 1
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
48/57
"=31'%1'1/z=31'%1'1/>""+zz?=meshgri!-"+z./=zz%b/mesh-+""+zz./la#el-d3aisd."la#el-d"3aisd.zla#el-dz3aisd.title-dThe
plot of G = b9$ie&->1B+DB?.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
49/57
efore start section 1%9
Sol$e section'1%1 @amplesan!
@n! Chapter Pro#lems ofsection 1%1
@ample -Not in #oo(.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
50/57
s"ms "
f=b"b:b93:"b93
f=!iff-f+./
f"=!iff-f+"./
s=sol$e-f+f"./
>s%+s%"?
p - .
Ma Min0
Classification of critical points
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
51/57
Classification of critical points
alue of f-+". at critical pointsf-B+B.=3 f-39+B.=-3.B19B3=3D
f-39+9.= 3193193=3 f-B+9.= BB3193=19
Luu=BI7
LuuKB7
LuuZB37
Mesh Surface
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
52/57
>+"?=meshgri!-3'%9'./z=%b"%b:%b93:"%b93/mesh-+"+z.la#el-3ais."la#el-"3ais.
7ifficult to$ie& MeshSurface
Contour map
>+"?=meshgri!-3'%9'./z=%b"%b:%b93:"%b93/contour-+"+z.la#el(
x-axis )ylabel( y-axis )
-4
-2
0
2
4
-4
-2
0
2
4-100
-50
0
50
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
>+"?=meshgri!-3'%9'./ 3
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
53/57
> "? g - .z=%b"%b:%b93:"%b93/contour-+"+z+9B.la#el- 3ais
.
"la#el- "3ais .
>+"?=meshgri!-3'%9'./z=%b"%b:%b93:"%b93/>c+h?=contour-+"+z+31D'3D./
cla#el-c+h.la#el- 3ais ."la#el- "3ais .
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
x-axis
y-ax
is
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Slop 00
Approach from an"!irection "ou are
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
54/57
x-axis
y-ax
is
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
Approach from an"!irection "ou are &al(ing
uphill crossing contour at3+3U+3E an! finall" local
maimum at -39+B.
!irection "ou are&al(ing !o&nhill
crossing contour at3+3+311 an! finall" local
minimum at -B+9.
If "ou mo$e from point -B+B.or -39+9. in an" one !irection
the height of the contour
increases an! !ecreases if"ou mo$e in opposite!irection
Xuestion'9 Assignment
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
55/57
6in! the minimum $alue of L-1+9.=19319991/ let = L-+".=93""9
s"ms "f=%b93:""%b9:/
f=!iff-f+./
f"=!iff-f+"./
s=sol$e-f+f"./
>s%+s%"?
>+"?=meshgri!-3'%9'./
f=%b93:""%b9:/mesh-+"+f.la#el-3ais."la#el-"3ais.
>+"?=meshgri!-3'%9'./
f=%b93:""%b9:/contour-+"+f.la#el( x-axis )ylabel( y-axis )
>+"?=meshgri!-3'%9'./f=%b93:""%b9:/>c+h?=contour-+"+f+31D'3D./cla#el-c+h.la#el-
3ais .
"la#el- "3ais .
>+"?=meshgri!-3'%9'./f=%b93:""%b9://contour-+"+f+EB.la#el-
3ais ."la#el- "3ais .
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
56/57
>+"?=meshgri!-3'%9'./z=%b"%b:%b93:"%b93/u =
z-+"./)ui$er-+"+u. / gri! on/ ais e)ual
Chec( for )ui$er-+"+u.
ANIMATION _
+"?=meshgri!-3'%9'./f=%b93:""%b9://contour-+"+f+EB.
la#el- 3ais ."la#el- "3ais .
Pro#lem 1%93D -oo(.
-
8/9/2019 Chap_1_Static Optimization_1.1_2014.ppt
57/57
s"ms " l
f=b9:3U3"/