Embed Size (px)
DESCRIPTION
STABILITY
Citation preview

General Stability Criterion
Most industrial processes are stable without feedback control. Thus, they are said to be open-loop stable or self-regulating. An open-loop stable process will return to the original steady state after a transient disturbance (one that is not sustained) occurs. By contrast there are a few processes, such as exothermic chemical reactors, that can be open-loop unstable.
Definition of Stability. An unconstrained linear system is said to be stable if the output response is bounded for all bounded inputs. Otherwise it is said to be unstable.
Ch
apte
r 11

Stability of Closed-Loop Control System – An Example

Stability of Closed-Loop Control System – Example (I)
3 2
1, 1, ,
2 11 1
, 1 5 1
1
10 17 8 1
1
c c m v
m p d
c
sp c
sp
G s K K G ss
G s G s G ss s
Y s K s
Y s s s s K
Y ss

Ch
apte
r 11

Characteristic Equation
1 2
1 2
1 2
1 2
where
( )( ) ( )
( )( ) ( )
( )( ) ( )
( )( ) ( )
Char
1
a
1
1
1
m c v p dsp
m c
OL OL
OL c v p m
OL
OL
v p m
sp n
d m
n
K G s G s G s G sY s Y s D s
K G s G s G sY s s z s z s zK
Y s s p s p s p
Y s G s s z s z s zK
D s s p s p s
G s G s
G s G s G s G s G s
p
G s
G s
cteristic equation of the closed-loop system
1 0OLG s

Stability Criterion of Closed-Loop System
1 2
0 1 2
1 2
0 1 2
all roots of
1
Assume the roots of characteristic equation are distinct:
The feedback control system is stable if and only
the char
a t r
i
e
f
c
n
sp
n
n
p tp t p tn
Y ss
A AA AY s
s s p s p s p
y t A A e A e A e
istic equation are negative or
have negative re . Otherwise, the system is unal parts stable.

Ch
apte
r 11

Roots of 1 + GcGvGpGm=0
Ch
apte
r 11
(Note complex roots always occur in pairs)

Example 1, , , 1
1
1 1 01
10 1
Select 0
0 0 (reverse acting)
0 0 (direct acting)
pc c v v p m
p
c v pOL
p
c v pc v p
p
c v p
v p p
v p p
KG K G K G G
s
K K KG
s
K K Ks K K K
K K K
K K K
K K K

Example 2
2
1 1, , , 1
2 1 5 1
1 1 02 1 5 1
10 7 1 0
7 49 40 1
20
1 0 1
c c v p m
cOL
c
c
c c
G K G G Gs s
KG
s s
s s K
Ks
K K

Example 3
1, 1,
10.2
1 1 01
(Open-loop system is unstable)
(Closed-loop system can be
0.2 1 0
made stabl
5 e!)
c c v m p
cOL
c
c
G K G G Gs
KG
ss K
K

Ch
apte
r 11
)3)(2)(1(
2)(
sss
KsG C
OL

Root Locus2
( )( 1)( 2)( 3)
Characterisitc equation
1 ( 1)( 2)( 3) 2 0
0 0.2 non-oscillatory, stable
0.2 30 oscillatory, stable
30 , constantly oscillatory
30 unst
COL
OL C
C
C
C u
C
KG s
s s s
G s s s K
K
K
K s j
K
able

11 1 0 0
1. All coefficients of the polynomial have the same sign.
2. None of them vanishes.
If any of the coefficients is neg
Necessary C
ative or zero, then at least
one ro
o
o
n
t
d o
o
iti ns:
n nn na s a s a s a
f the characteristic equation lies in the RHP,
and thus the system is unstable.
If all of the coefficients are positive, then one must construct
the Routh Array.
Ch
apte
r 11
Necessary Conditions for Roots with Negative Real Parts

1
1
2
1 1
3
1 1 1,
0
1 1
Note that
10
1!
10
2!
10
3!
1 0
nn
iin
n nn
i ji jn
j i
n n nn
i j ki j kn
j i k i j
n nn
m mm mn
as
a
as s
a
as s s
a
as s
a

Ch
apte
r 11
Routh Array

The first two rows of the Routh Array are comprised of the coefficients in the characteristic equation. The elements in the remaining rows are calculated from coefficients by using the following formulas:
1 2 3 1 4 51 2
1 1
1 3 1 2 1 5 1 31 2
1 1
1 rows must be con
; ;
; ;
structed!
n n n n n n n n
n n
n n n n
n
a a a a a a a ab b
a a
b a a b b a a bc c
b b
..C
hap
ter
11

6 5 4 3 26 5 4 3 2 1 0
6 4 2 0
5 3 1
5 4 6 3 5 2 6 1 5 0 61 2 3
5 5 5
1 3 5 2 1 1 5 3 1 51 2
1 1 1
1 3 11 2 1 21 2
1 1
1 2 1 21
1
1 2 11
1
0
0
00
0 00 0
00 0
0 0 0
00 0 0
a s a s a s a s a s a s a
a a a a
a a a
a a a a a a a a a a ab b b
a a a
b a a b b a a b b ac c
b b b
c b bc b b cd d
c c
d c c de
d
e d df
e

Routh Criterion
The roots of a polynomial are all in the left half of s-plane if all elements of the first column of the Routh array are of the same sign.
If there are changes of signs in the elements of the first column, the number of sign changes indicates the number of roots with positive real parts.

3 24 6 2 1 3 0
1 1
4 6
4 1 1 62.5 0
42.5 6 4 0
6 02.5
s s s s s s

4 3 22 3 5 10 0
2 3 10
1 5 0
1 3 2 57 10 0
17 5 1 10
6.43 0 07
10
s s s s

Closed-Loop Example (I) – Solved by Routh Test
3 2
1 2
11 2
1
10 17 8 1 0
10 8
17 1
17 8 10 17.41 0.588 0 0
171 17 0
1 0 0
1 12.6
c
c
cc
cc
c
s s s K
K
Kb K b
b Kc K c
b
K

Closed-Loop Example (II)
3
3 2
81
( 2)
Characteristic Eqn is: 1 0
6 12 8 8 0
Routh Array:
1 12
6 8 8
6(12) 1 8 80 0
68 8 0 0
1 8
p d v m c c
c v p m
c
C
C
C
C
G G G G G Ks
G G G G
s s s K
K
K
K
K

Direct Substitution Method
This method is based on the fact that, if the roots of the characteristic equation vary continuously with loop parameters, at the point at which a stable loop just becomes unstable at least one and usually two of the roots must lie on the imaginary axis of the complex plane, that is, there must be pure imaginary roots.

Direct Substitution Steps
1. Let
and substitute it into the characteristic equation.
2. Let both the resulting real part and imaginary part to be zero
and then solve simultaneously for and .
u
u cu
s j
K

Closed-Loop Example (I) – Solved by Direct Substitution
3 2
2 3
2
3
10 17 8 1 0
Let and
1 17 8 10 0
0.8941 17 0
8 10 12.6 (same as before)0
c
u c cu
cu u u u
ucu u
cuu u
s s s K
s j K K
K j
K
K

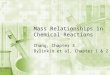
Figure 11.29 Flowchart for performing a
stability analysis.
Ch
apte
r 11

1. Bode Stability Criterion• Ch. 14 - can handle time delays
2. Nyquist Stability Criterion• Ch. 14 - can handle time delays
Additional Stability Criteria
Ch
apte
r 11

Special Cases of Routh Criterion
1. The first element in any one row of the Routh array is zero, but the other elements are not.
2. The elements in one row of the Routh array are all zero.

Example of Case 1
23 3 2 1 2 0
1 3
20
s s s s

Case 1: Remedial Technique 1 – multiply an extra term (s+a)
2 4 3 21 2 3 3 7 6 0
1 3 6
3 7 0
9 70.66 6 0
30.66 7 18
20 00
3
.666
s s s s ss s

Case 1: Remedial Technique 2 – replace 0 by a small positive number
23 3 2 1 2 0
1 3
2
3 20 0
2
s s s s

Causes of Case 2
1. Pairs of real roots with opposite signs.
2. Pairs of imaginary roots.
3. Pairs of complex-conjugate roots forming symmetry about the origin of the s-plane.

Example 1 of Case 2 (1)
2 4 3 21 2 1 3 2 0
1 3 2
1 1 0
1 3 1 1( )
12 2
2 20 0
coefficients of auxiliary
Cause
2?
equa
d by (1)
o
!
ti n
s s s s s s s

Remedial Steps of Case 2
1. Take the derivative of the auxiliary equation wrt s.
2. Replace the row of zeros with the coefficients of the resultant equation obtained in step 1.
3. Carry on Routh test in the usual manner with the newly formed tabulation.

2
Auxiliary Equation:
2 2 0 Note that 1
4
1
2 2 coefficients of
4 0 coefficien
3 2
1 1
ts
0
( )
( of )
(
2
) A s
A s s s
A
dA ss
ds
s
Example 1 of Case 2 (2)

Example 2 of Case 2 (1)
6 5 4 3 2
2
Caused by (1) and (
2 3 7 4 4
2 2 1 0
1 2 7 4
1
1 3 4 coefficients of auxiliary equation
2)
4 0
0
3
0 0
s s s s s s
s s s j s j s s

Example 2 of Case 2 (2)
4 2
3
1.0 3 4 coefficients of
+4.0 6 0 coefficients of
3 4 0
4 6 0
1.0 2 7 4
1.0 3 4 0
1.5 4 0
16.7 0
4 0
A
A
A s s
s
s
A s s
s
s

Closed-Loop Example (I) – Solved by Routh Test
3 2
1 2
1
2 2
10 17 8 1 0
10 8
17 1
17 8 10 10
17?
12.6
Auxiliary equation is: 17 1 17 13.6
7.41 0.588 0
0.894
(same as those obtained by direct substituti
o
0
n)
c
c
c
c
c
c
u
s s s K
K
Kb b
c
K
s K s
s j j
K