Embed Size (px)
Citation preview

Chapter 13Embedded Systems
Patricia RoyManatee Community College, Venice,
FL©2008, Prentice Hall
Operating Systems:Internals and Design Principles, 6/E
William Stallings

Embedded System
• Hardware and software designed to perform a dedicated function
• Tightly coupled to their environmnet

Examples

Examples

Embedded System Organization

Characteristics of Embedded Operating System
• Real-time operation• Reactive operation
– Respond to external events
• Configurability– Large variation in systems so need flexible
configuration

Characteristics of Embedded Operating System
• I/O device flexibility• Streamlined protection mechanisms• Direct use of interrupts

Adapting an Existing OS
• Add real-time capability• Streamlining operation• Add necessary functionality

eCos
• Embedded Configurable Operating Systems
• Open source• Royalty-free• Real-time OS• Most widely used embedded OS

eCos Configuration Tool

eCos Configuration Tool

Loading an eCos Configuration

eCos Layered Structure

Hardware Abstraction Layer
• Presents consistent API to upper layers• Different for each hardware platform

HAL

HAL Modules
• Architecture– Processor family type
• Variant– Support features of specific processor
• Platform– Support of tightly coupled peripherals

eCos Kernel
• Low interrupt latency• Low task switching latency• Small memory footprint• Deterministic behavior

Not in eCos Kernel
• Memory allocation• Device driver

eCos I/O System
• Framework for supporting device drivers

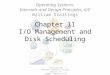
eCos Scheduler
• Bitmap scheduler– Efficient for small number of threads active– Each thread has different priority

Bitmap Scheduler

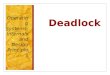
eCos Scheduler
• Multilevel queue scheduler– Appropriate when number of threads is
dynamic– Multiple threads at each priority– Time slicing

Multilevel Queue Scheduler

eCos Thread Synchronization
• Mutexes• Semaphores• Condition variables

eCos Thread Synchronization
• Event flags• Mailboxes• Spinlocks
– Useful in SMP (symmetric multiprocessing)

Mutexes

Mutexes and Condition Variables

Mutexes and Condition Variables

TinyOS
• 400 bytes of code• Not a real-time OS• No kernel• No memory protection

Tiny OS
• Component-based OS• No processes• No memory allocation• Interrupt and exception handling
dependent on peripheral• Nonblocking

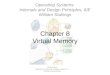
Wireless Sensor Network Topology

TinyOS Goals
• Allow high concurrency• Operate with limited resources• Adapt to hardware evolution

TinyOS Goals
• Support a wide range of applications• Support a diverse set of platforms• Be robust

TinyOS Components
• Single-hop networking• Ad-hoc routing• Power management• Times• Nonvolatile storage control

TimerM Component

TimerM Configuration

TinyOS Scheduler
• Operates across all components• Only one task executes at one time• Simple FIFO queue

Example TinyOS Appliction

Example TinyOS Appliction

TinyOS Resource Interface
• Dedicated• Virtualized• Shared

Shared Resource Configuration