Embed Size (px)
Citation preview

37 �
CHAPTER 2
ENERGY EFFICIENT LOCATION AND DISTRIBUTED
PARTITIONING OF WIRELESS SENSOR NETWORKS
2.1 INTRODUCTION
A WSN is composed of a group of small power-constrained nodes
with functions of sensing and communication, which can be scattered over a
vast region for the purpose of detecting or monitoring some special events. It
consist of many low-cost and low-powered sensor nodes (called sensors or
nodes) that collaborate with each other to gather, process, and communicate
information using wireless communications which is showing Figure 2.1.
Sensors are battery operated with a processor and a radio.
They are characterized by limited resources in terms of memory,
computation and energy. Wireless sensor networks have met a growing
interest in the last years due to their applications in a wide range of contexts,
such as national security, traffic, military, motion detection for understanding
earthquake patterns and to prevent theft, habitat monitoring, intrusion
detection, traffic analysis, environmental monitoring, among others. As a
bridge to the physical world, sensing is indispensable elements of much
sensor network system.
38 �
Zhixin Liu et al 2012 they propose DEECIC (Distributed Energy-
Efficient Clustering with Improved Coverage), a distributed clustering
algorithm that considers both energy and topological features of the sensor
network. DEECIC offers a feasible and efficient solution to handle a large-
scale network with their enhancements to better assigned unique IDs to sensor
nodes, reducing communication expense and improve network coverage.
A node in DEECIC can have four possible states: cluster head, 1-hop member
node (an immediate neighbor of a cluster head), 2-hop member node
(an immediate neighbor of a 1-hop member node) and unclustered node (not a
member of any cluster). Clustering is completely distributed. Each node only
interacts with a small set of sensor nodes within its transmission range.
Regardless of network size, DEECIC produces a clustering of nodes within a
fixed constant time.
Sudip Misra et al 2011 they propose an Euclidean distance-based
coverage scheme, which covers the monitoring area in a very effective
manner, even in the case of the random deployment of nodes. The more an
Euclidean distance between the nodes, the more an effective coverage of the
sensor nodes. In order to keep the sensor nodes connected, the distance of the
nodes in communication range only is considered. The proposed algorithm
will not require more message exchanges and activates the nodes such that the
whole network remains connected at any instant of time. The algorithm
follows these steps
1. The cluster head broadcasts the HELLO messages, and waits
for the common nodes to reply with their location information.
39 �
2. It computes the mutually exclusive and disjoint sets of
common nodes, and sends the set number to all the common
nodes.
3. It collects the data sent by the nodes, and sends it to the base
station.
By following a divide-and-conquer approach, the whole network
area to be monitored is divided into a number of small parts, and the above
algorithm is implemented in all the parts individually.
Ali Chamam and Samuel Pierre 2010 they propose a novel
distributed clustering algorithm called Energy efficient Cluster Formation
protocol (EECF), cluster heads are elected following a three-way message
exchange between each sensor and its neighbors. Run on a flat topology of
sensors, EECF ends up with a hierarchical topology in which sensors are
organized into clusters having, each, one sensor promoted as a cluster head
(CH) and all the other regular sensors connected to the closest CH. To control
the sensors that perform data relaying, the routing task is restricted to CHs,
since they are more eligible than the other nodes in terms of residual energy.
If CHs were chosen a priori and fixed throughout the system’s lifetime, the
nodes would quickly exhaust all their limited energy making them no longer
operational and therefore, all the nodes that belong to the cluster would lose
their communication ability.
Dilip Kumar et al 2009 they propose an energy efficient
heterogeneous clustered scheme (EEHC) for wireless sensor networks based
on weighted election probabilities of each node to become a cluster head
according to the residual energy in each node. The optimal probability of a
node being elected as a cluster head or as a function of spatial density, when
40 �
nodes are uniformly distributed over the sensor field. This clustering is
optimal in the sense that energy consumption is well distributed over all
sensors and the total energy consumption is a minimum one.
Watfa et al 2009 they propose a Battery Aware Reliable Clustering
(BARC) algorithm, which rotates cluster heads (CHs) according to a battery
recovery scheme and it also incorporates a trust factor for selecting cluster
heads thus increasing reliability. The BARC algorithm is initiated every
round. Each round consists of two stages initialization/setup and steady state.
The round lasts for T seconds while the initialization/setup stage lasts for t
seconds. BARC allows the formation of a cluster in a WSN by electing a set
of CHs, according to the battery recovery model, where each CH is
responsible for servicing a set of nodes of a specific cluster.
Each node requests to join a CH according to certain criteria,
mainly, by evaluating which CH suits the exact needs of this node. BARC
allows the formation of a cluster in a WSN by electing a set of CHs,
according to the battery recovery model, where each CH is responsible for
servicing a set of nodes of a specific cluster. Each node requests to join a CH
according to certain criteria, mainly, by evaluating which CH suits the exact
needs of this node. BARC algorithm results in: the increased energy
efficiency (by using battery awareness techniques and cluster head rotation),
load balancing (by limiting the number of nodes each cluster head can
support), increased reliability (by introducing a trust factor), h-level clustering
hierarchy, better bandwidth reuse, and increased network lifetime.
Zhong Zhou et al 2008 they propose a cooperative transmission
scheme based on a distributed space time block coding. The number of
cooperating nodes within each cluster is random and depends on both channel
41 �
and noise realizations. Specifically, only sensors that can correctly decode
receive data packets from the cluster head using practical modulation and
coding schemes which participates in the cooperative transmission. The
scheme works in two phases as follows,
• Intra-cluster broadcasting: The source node broadcasts the
packet with certain energy (Et1 per symbol) to the nodes
within the same cluster. All the nodes in the cluster decode the
received packet simultaneously. With CRC parity check bits,
it is assumed that each node knows exactly whether the
reception is successful or not.
• Inter-cluster cooperative transmission: The source node and
all the nodes that decode the packet correctly will
“cooperatively” transmit the packet simultaneously with the
same energy (Et2 per symbol) to the destination node. In the
relay transmission, the cooperative schemes based on
distributed space-time coding (Laneman and Wornell 2003) is
used.
2.2 PROBLEM FORMULATION
Most of the low - power devices have limited battery life and
replacing batteries on tens of thousands of these devices is infeasible. It is
accepted that a sensor network should be deployed with a high density, in
order to prolong the network lifetime. In such a high density network with
energy constrained sensors, if all the sensor nodes operate in the active mode,
an excessive amount of energy will be wasted, sensor data collected is likely
to be highly correlated and redundant, and moreover excessive packet

42 �
collision may occur as a result of sensors intending to send packets
simultaneously.
Intuitively, the relationship between coverage and connectivity
depends on the ratio of the communication range to the sensing range.
However, it is easily seen that a connected network may not guarantee its
coverage regardless of the ranges. This is because coverage is concerned with
whether any location is uncovered while connectivity only requires all
locations of active nodes that are connected.
Figure 2.1 Sensing model of sensors
2.2.1 Communication Models
A widely accepted basic graph – theoretical model for wireless
sensor networks is unit - graph model. In the unit graph model, two nodes A
and B are neighbors and thus joined by an edge and the radius of transmission
is assumed to be the same for all nodes in the network. Variation of the model
includes unit graphs with obstacles and manpower graphs where each node
has its own maximum transmission radius and links are unidirectional or
allowed only when bidirectional communication is possible. Nodes in an
43 �
adhoc network may transmit with their maximum transmission radius or may
adjust their transmission range normally selected from a discrete set of
possible values.
The network is normally assumed to be homogeneous; with all
nodes processing the same network attributes such as computational capacity,
battery power and transmission radii. In heterogeneous networks, however
nodes may have different network attributes. In the Random unit graph model
the parameters, are the number of nodes and common transmission radius and
all generated graphs may be either dense or sparse. It is therefore preferable to
use another parameter called average number of neighbors per each node. It is
usually assumed in the literature that each node is aware of its direct
neighbors. In the case that the assumption does not hold a node may broadcast
a “hello” message with all the nodes that receive the message being defined as
neighbors.
2.2.2 Node Category Segregation based on Energy
By calculating the energy of each sensor node the localization is
possible by the formula as given below
� �
Where E is the energy, b is the battery life of each sensor and d is
the amount of data transmitted within the battery life of that sensor.
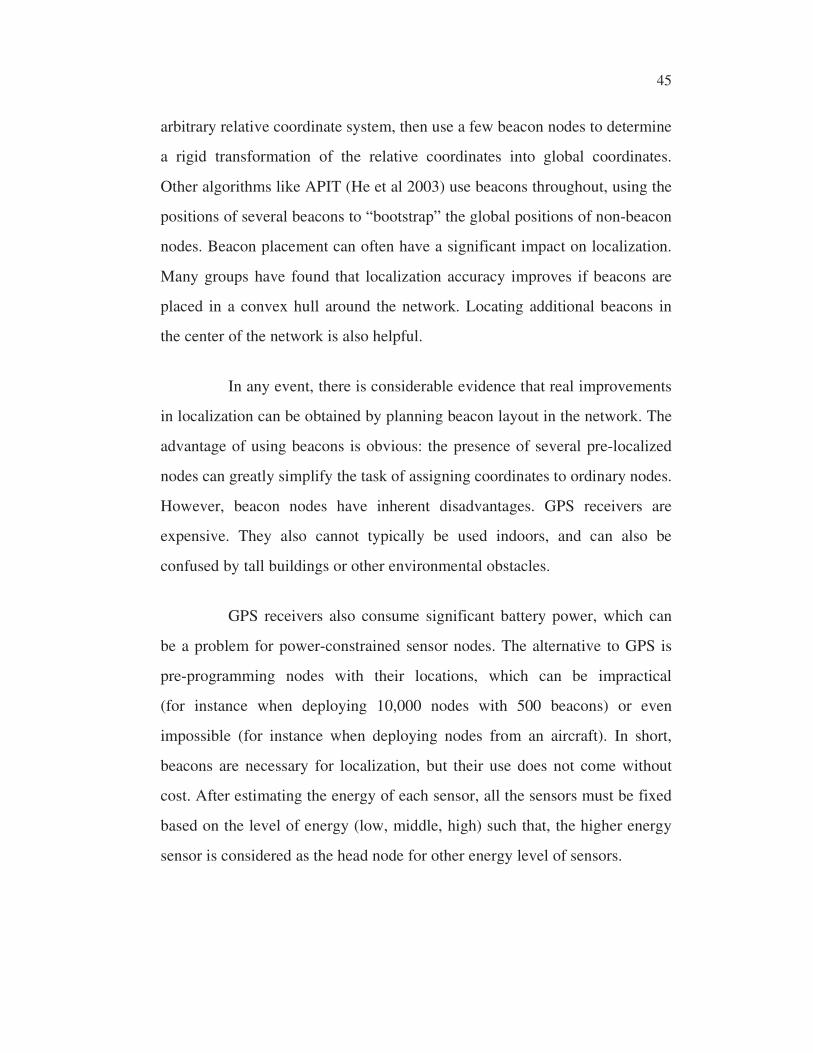
From the above mentioned formula the energy is individually
calculated for all sensors, to identify the energy level of each sensor. Energy
44 �
level of sensor nodes are divided in 3 ranges which is show in below
Table 2.1.
Table 2.1 Level of Sensors
Range (energy) Level of sensors
Between 0 to 49 Low
Between 50 to 79 Middle
Between 80 to 99 High
This formulation is stated to solve the communication overhead
issue which is described in the following sections.
2.3 LOCALIZING AND OPTIMIZATION OF NODES
The goal of localization is to determine the physical coordinates of
a group of sensor nodes. These coordinates can be global, meaning they are
aligned with some externally meaningful system like GPS, or relative,
meaning that they are an arbitrary “rigid transformation” (rotation, reflection,
translation) away from the global coordinate system. Beacon nodes (also
frequently called anchor nodes) are necessary prerequisite to localizing a
network in a global coordinate system. Beacon nodes are simply ordinary
sensor nodes that know their global coordinates a priori. This knowledge
could be hard coded, or acquired through some additional hardware like GPS
receiver. At a minimum, three non-collinear beacon nodes are required to
define a global coordinate system in two dimensions.
If three dimensional coordinates are required, then at least four non-
coplanar beacons must be present. Beacon nodes can be used in several ways.
Some algorithms like MDSMAP (Yi Shang et al 2003) localize nodes in an
45 �
arbitrary relative coordinate system, then use a few beacon nodes to determine
a rigid transformation of the relative coordinates into global coordinates.
Other algorithms like APIT (He et al 2003) use beacons throughout, using the
positions of several beacons to “bootstrap” the global positions of non-beacon
nodes. Beacon placement can often have a significant impact on localization.
Many groups have found that localization accuracy improves if beacons are
placed in a convex hull around the network. Locating additional beacons in
the center of the network is also helpful.
In any event, there is considerable evidence that real improvements
in localization can be obtained by planning beacon layout in the network. The
advantage of using beacons is obvious: the presence of several pre-localized
nodes can greatly simplify the task of assigning coordinates to ordinary nodes.
However, beacon nodes have inherent disadvantages. GPS receivers are
expensive. They also cannot typically be used indoors, and can also be
confused by tall buildings or other environmental obstacles.
GPS receivers also consume significant battery power, which can
be a problem for power-constrained sensor nodes. The alternative to GPS is
pre-programming nodes with their locations, which can be impractical
(for instance when deploying 10,000 nodes with 500 beacons) or even
impossible (for instance when deploying nodes from an aircraft). In short,
beacons are necessary for localization, but their use does not come without
cost. After estimating the energy of each sensor, all the sensors must be fixed
based on the level of energy (low, middle, high) such that, the higher energy
sensor is considered as the head node for other energy level of sensors.
46 �
2.3.1 Issues in Localization of Sensor Nodes
2.3.1.1 Resource constraints
Sensor networks are typically quite resource-starved. Nodes have
rather weak processors, making large computations infeasible. Moreover,
sensor nodes are typically battery powered. This means communication,
processing, and sensing actions are all expensive, since they actively reduce
the lifespan of the node performing them. Not only that, sensor networks are
typically envisioned on a larger scale, with hundreds or thousands of nodes in
a typical deployment. This fact has two important consequences: nodes must
be cheap to fabricate, and trivially easy to deploy. Nodes must be cheap, since
fifty cents of additional cost per node translates to $500 for one thousand
node network.
Deployment must be easy as well: thirty seconds of handling time
per node to prepare for localization translates to over eight man-hours of work
to deploy 1000 node network. Localization is necessary to many functions of
a sensor network; however, it is not the purpose of a sensor network.
Localization must cost as little as possible while still producing satisfactory
results. That means designers must actively work to minimize the power cost,
hardware cost, and deployment cost of their localization algorithms.
2.3.1.2 Node density
Many localization algorithms are sensitive to node density. For
instance, hop count based schemes generally require high node density so that
the hop count approximation for distance is accurate. Similarly, algorithms
that depend on beacon nodes fail when the beacon density is not high enough
47 �
in a particular region. Thus, when designing or analyzing an algorithm, it is
important to notice the algorithm’s implicit density assumptions, since high
node density can sometimes be expensive if not totally infeasible.
2.3.1.3 Non-convex topologies
Localization algorithms often has trouble positioning nodes near
the edges of a sensor field. This artifact generally occurs because fewer range
measurements are available for border nodes, and those few measurements are
all taken from the same side of the node. In short, border nodes are a problem
because less information is available about them and that information is of
lower quality. This problem is exacerbated, when a sensor network has a non
convex shape: Sensors outside the main convex body of the network can often
prove un-localizable. Even when locations can be found, the results tend to
feature disproportionate error.
2.3.1.4 Environmental obstacles and terrain irregularities
Environmental obstacles and terrain irregularities can also wreak
havoc on localization. Large rocks can occlude line of sight, preventing
TDoA ranging, or interfere with radios, introducing error into RSSI ranges
and producing incorrect hop count ranges. Deployment on grass vs. sand vs.
pavement can affect radios and acoustic ranging systems. Indoors, natural
features like walls can impede measurements as well. All of these issues
are likely to come up in real deployments, so localization systems should be
able to cope.
48 �
2.3.2 FixPos Algorithm
This Position Fixing (Fixpos) algorithm of sensors is used to find
the optimized position in the network. Among the higher energy sensors the
highest energy sensor is chosen as the base node (BN), the remaining higher
energy sensors act as the head node (HN), other middle and low energy
sensors will act as slave nodes (SN).
FixPos algorithm can be explained on the basis of two scenarios:
• Scenario 1 concentrates on the HN and BN where the position
of HN is within the transmission range of BN (Section 4.1.1).
• Scenario 2 concentrates on the SN and HN where the position
of SN is within the transmission range of HN (Section 4.1.2).
2.3.2.1 Fixing the head nodes, BN acts as an actor
The BN is responsible for the communication between all head
nodes, which are placed within the transmission range of BN that is done by
using the expression below (Eq.1). The other energy level of sensors works
within the transmission range of HN.
The position estimate of BN and HN can be found using the
following expression:
[ ] [ ] (2)Rbh(i)(2)rbh(i)↑↑
−−+−− (2.1)
49 �
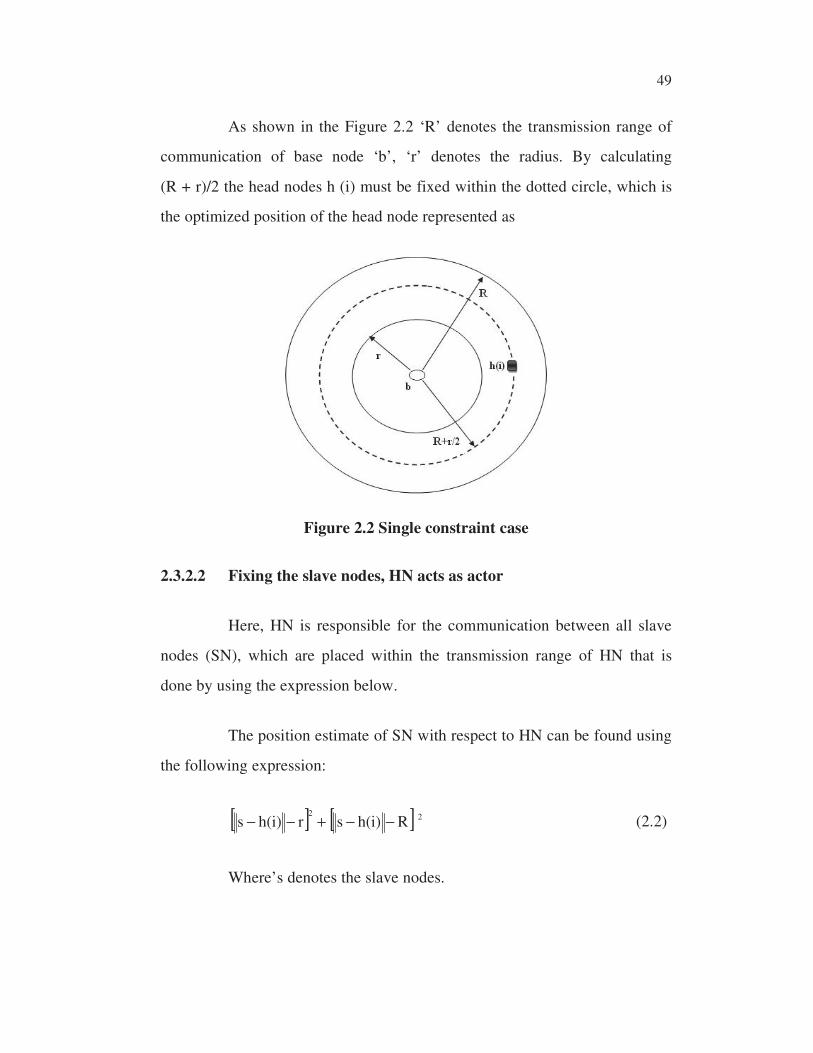
As shown in the Figure 2.2 ‘R’ denotes the transmission range of
communication of base node ‘b’, ‘r’ denotes the radius. By calculating
(R + r)/2 the head nodes h (i) must be fixed within the dotted circle, which is
the optimized position of the head node represented as
Figure 2.2 Single constraint case
2.3.2.2 Fixing the slave nodes, HN acts as actor
Here, HN is responsible for the communication between all slave
nodes (SN), which are placed within the transmission range of HN that is
done by using the expression below.
The position estimate of SN with respect to HN can be found using
the following expression:
[ ] [ ] 22
Rh(i)srh(i)s −−+−− (2.2)
Where’s denotes the slave nodes.
50 �
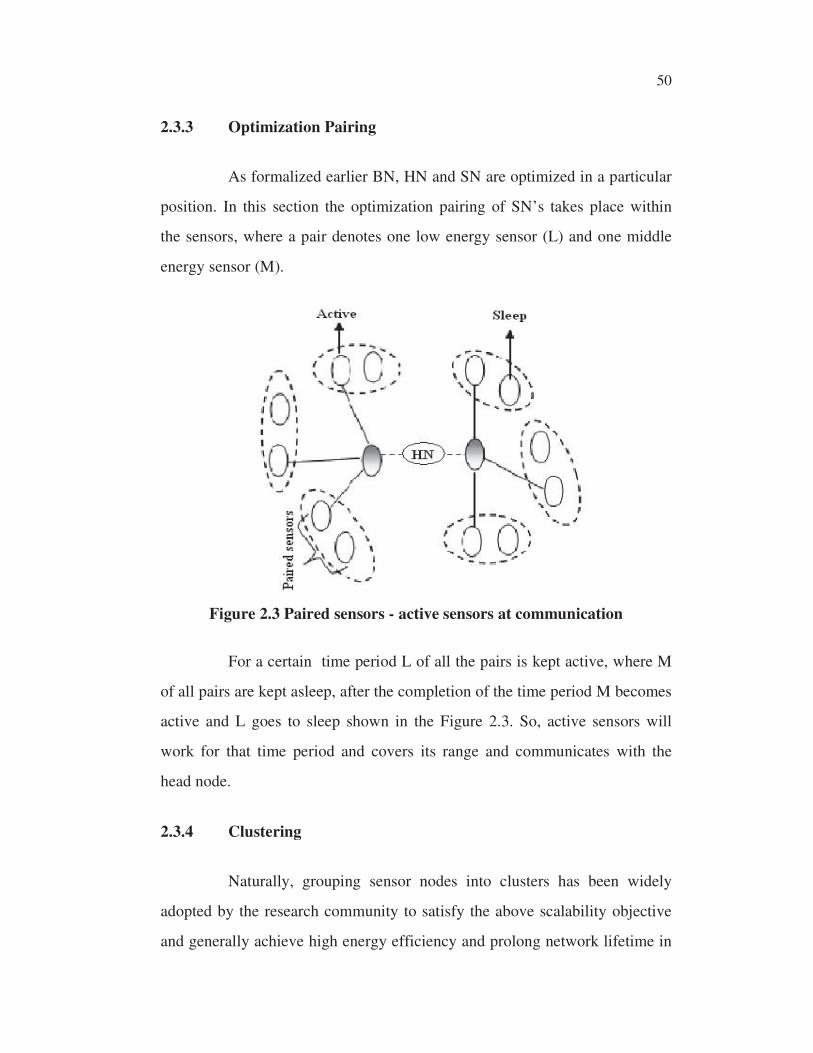
2.3.3 Optimization Pairing
As formalized earlier BN, HN and SN are optimized in a particular
position. In this section the optimization pairing of SN’s takes place within
the sensors, where a pair denotes one low energy sensor (L) and one middle
energy sensor (M).
Figure 2.3 Paired sensors - active sensors at communication
For a certain time period L of all the pairs is kept active, where M
of all pairs are kept asleep, after the completion of the time period M becomes
active and L goes to sleep shown in the Figure 2.3. So, active sensors will
work for that time period and covers its range and communicates with the
head node.
2.3.4 Clustering
Naturally, grouping sensor nodes into clusters has been widely
adopted by the research community to satisfy the above scalability objective
and generally achieve high energy efficiency and prolong network lifetime in
51 �
large-scale WSN environments. The corresponding hierarchical routing and
data gathering protocols imply cluster-based organization of the sensor nodes
in order that data fusion and aggregation are possible, thus leading to
significant energy savings. In the hierarchical network structure each cluster
has a leader, which is also called the cluster head (CH) and usually performs
the special tasks referred above (fusion and aggregation), and several
common sensor nodes (SN) as members.
The cluster formation process eventually leads to a two-level
hierarchy where the CH nodes form the higher level and the cluster-member
nodes form the lower level. The sensor nodes periodically transmit their data
to the corresponding CH nodes. The CH nodes aggregate the data (thus
decreasing the total number of relayed packets) and transmit them to the base
station (BS) either directly or through the intermediate communication with
other CH nodes.
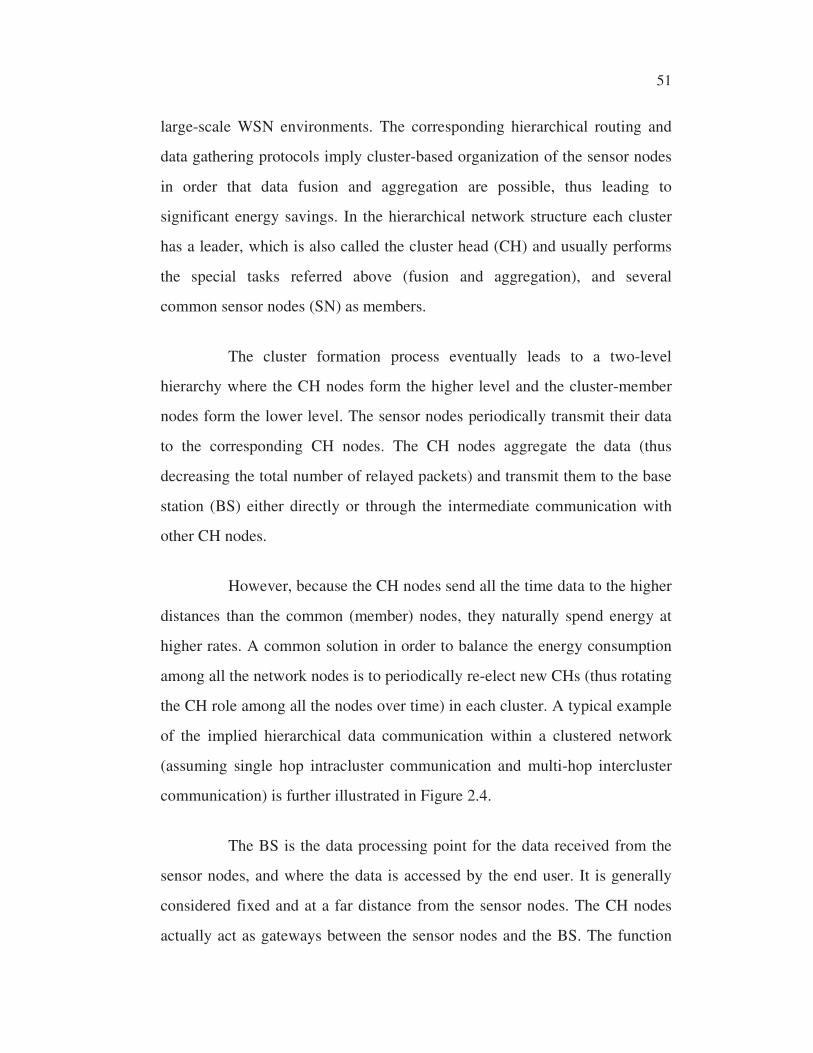
However, because the CH nodes send all the time data to the higher
distances than the common (member) nodes, they naturally spend energy at
higher rates. A common solution in order to balance the energy consumption
among all the network nodes is to periodically re-elect new CHs (thus rotating
the CH role among all the nodes over time) in each cluster. A typical example
of the implied hierarchical data communication within a clustered network
(assuming single hop intracluster communication and multi-hop intercluster
communication) is further illustrated in Figure 2.4.
The BS is the data processing point for the data received from the
sensor nodes, and where the data is accessed by the end user. It is generally
considered fixed and at a far distance from the sensor nodes. The CH nodes
actually act as gateways between the sensor nodes and the BS. The function
52 �
of each CH, as already mentioned, is to perform common functions for all the
nodes in the cluster, like aggregating the data before sending it to the BS. In
some way, the CH is the sink for the cluster nodes, and the BS is the sink for
the CHs. Moreover, this structure formed between the sensor nodes, the sink
(CH), and the BS can be replicated as many times as it is needed, creating (if
desired) multiple layers of the hierarchical WSN (multi-level cluster
hierarchy).
Figure 2.4 Data communication in a clustered network
In this methodology, clustering uses a hybrid criterion for cluster
formation, which considers the residual energy of each node and a secondary
parameter, such as the node’s proximity to its neighbors or the number of its
neighbors. Clustering plays a great role in reducing the energy consumption
of the nodes, communication overhead and enhancing the network lifetime.
While most of the clustering algorithms focus on the energy balance of the
nodes to prolong the network lifetime, in this research the focus is on
53 �
improving the energy efficiency of the network and to overcome the
communication overhead where the coverage increases automatically.
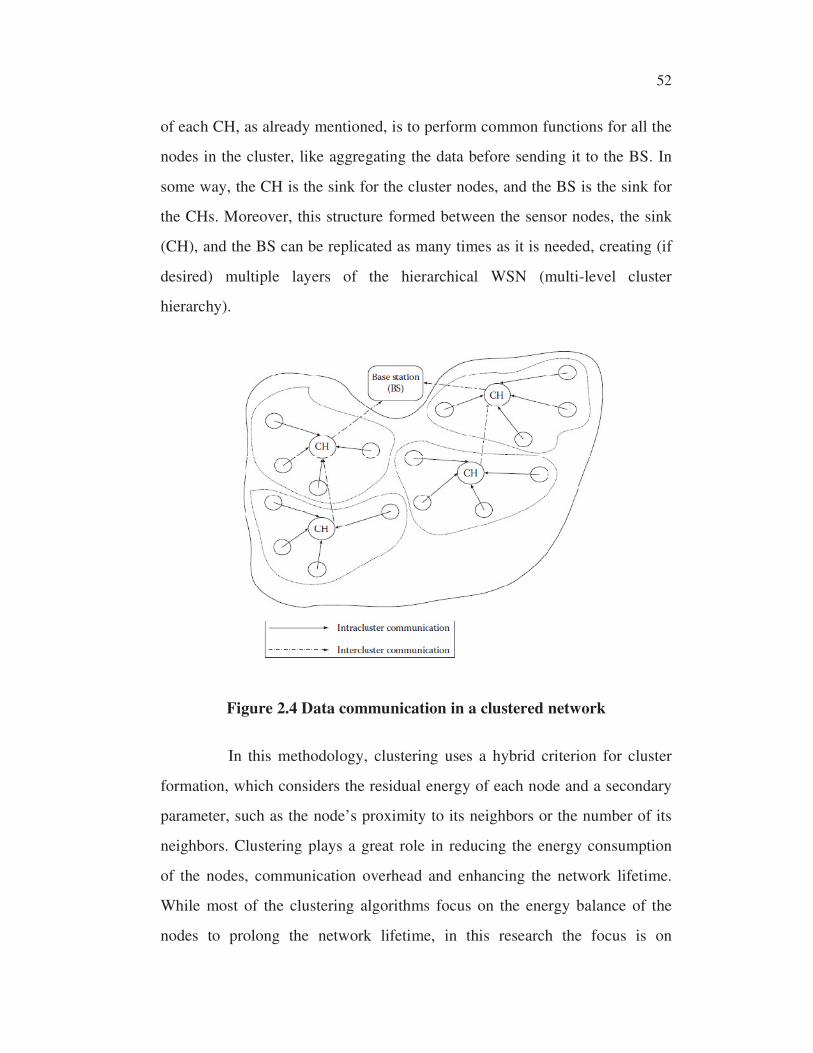
Here a cluster is formed between a HN and certain pair of nodes
such that each cluster is balanced based upon the number of pairs. HN is
mentioned as cluster head. Among the M nodes the adjacent node with
maximum energy in the pair within the cluster is chosen as the back off node
for the cluster head. At any critical situation the primary cluster head is
replaced by the secondary head (back off node).
Figure 2.5 Clustering
The cluster formation of the slave nodes with its head nodes is
shown in the Figure 2.5. In the figure the network is grouped into three
clusters with balanced number of slave nodes for each head nodes. The dotted
circle around the base node is the transmission range where the head nodes
are fixed.
54 �
2.3.5 Distributed Partitioning Connectivity Backup (DPCB)
Algorithm
It’s clear that connectivity only requires the location of any active
node to be within the communication range of one or more active nodes such
that all active nodes can form a connected communication backbone.
Once sensor configuration is finished, nodes shall be comprised of
connected networks to send information collected back to the control center
(Zhu et al 2012).
Inter-node connectivity is not only very crucial to the effectiveness
of the application, but some nodes may also play a role in maintaining flow of
information from the sensors to in situation and remote users.
The failure of a node could hamper the network connectivity and
disrupt the collection of the sensed data. In the worst case, due to a node
failure, the network may get partitioned into multiple disjoint blocks and stop
functioning. Thus, the network connectivity should be recovered so that
subsequent negative effects on the application could be avoided (Tamboli and
Younis 2010).
Rapid restoration of connectivity is desirable in order to maintain
the WSN responsiveness to detected events. Deploying a replacement of the
failed node is a slow solution at best and is often infeasible in risky areas, e.g.,
combat zones. Therefore, the recovery should be a self-healing process
involving the existing nodes. Given the autonomous and unsupervised
operation of WSN, tolerating the failure should be performed in a distributed
manner. In addition, the overhead should be minimized in order to suit the
resource-constrained sensors
55 �
��
��
�� �� ��
��
��
�� �� ��
��
��
�� �� ��
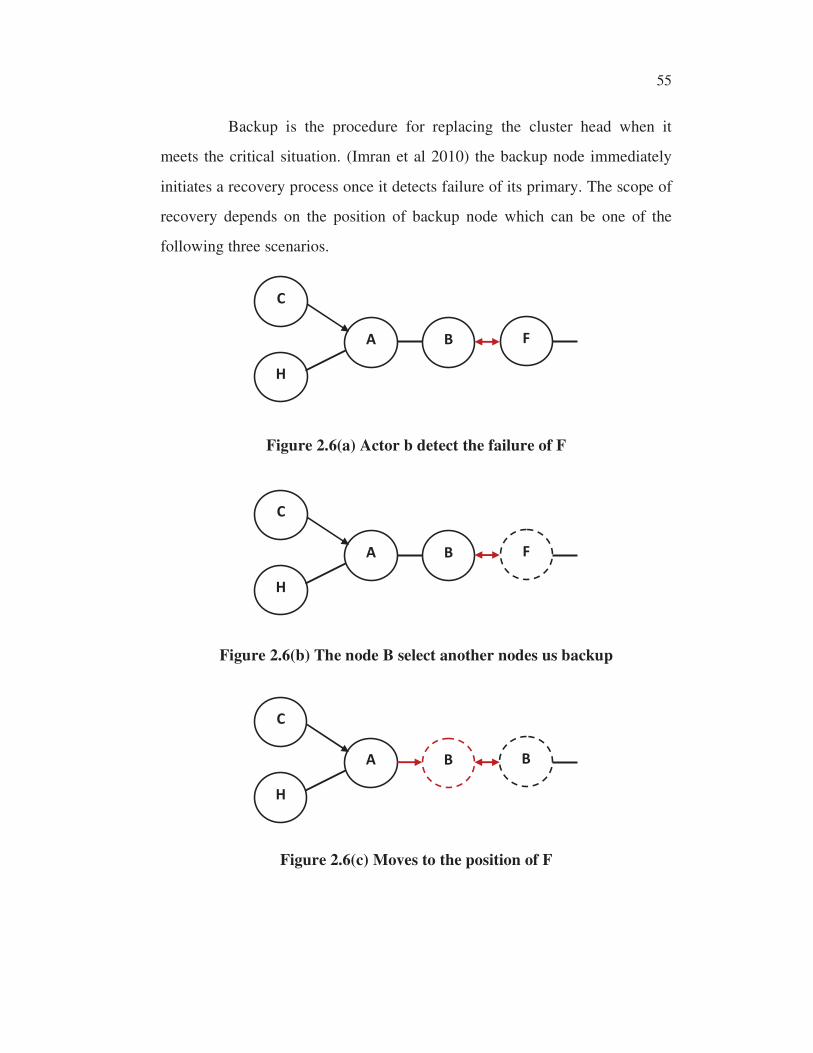
Backup is the procedure for replacing the cluster head when it
meets the critical situation. (Imran et al 2010) the backup node immediately
initiates a recovery process once it detects failure of its primary. The scope of
recovery depends on the position of backup node which can be one of the
following three scenarios.
Figure 2.6(a) Actor b detect the failure of F
Figure 2.6(b) The node B select another nodes us backup
Figure 2.6(c) Moves to the position of F
56 �
��
�� �� ��
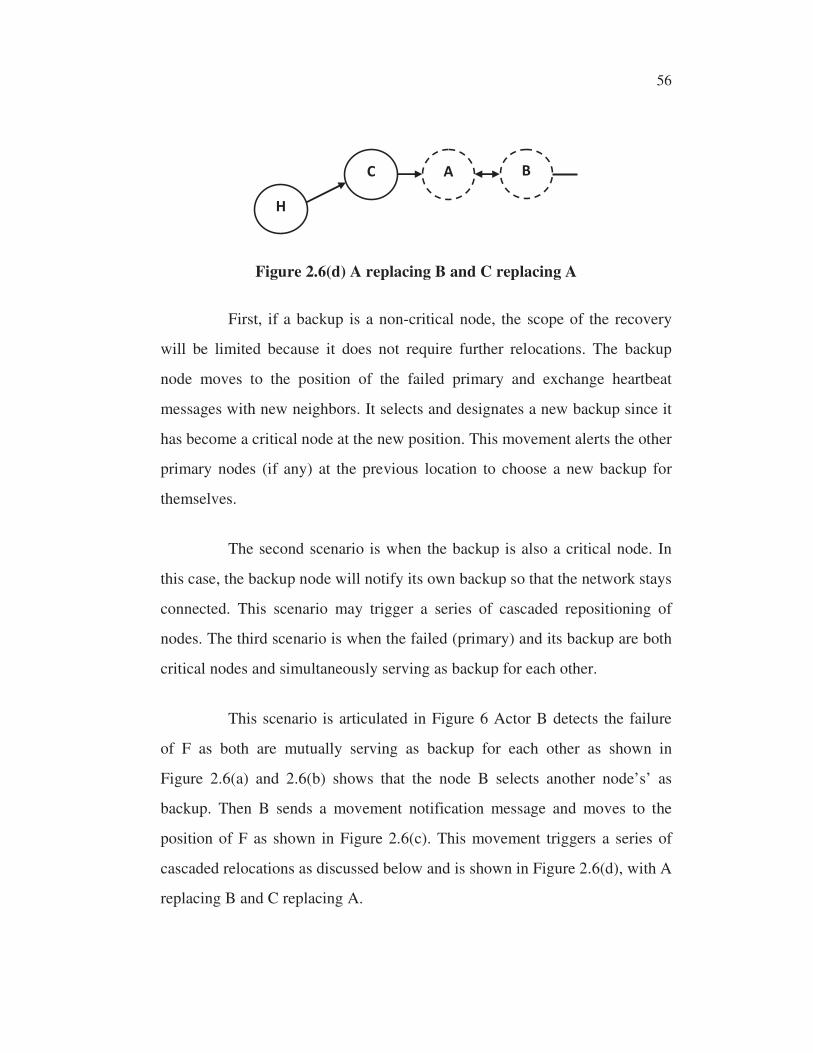
Figure 2.6(d) A replacing B and C replacing A
First, if a backup is a non-critical node, the scope of the recovery
will be limited because it does not require further relocations. The backup
node moves to the position of the failed primary and exchange heartbeat
messages with new neighbors. It selects and designates a new backup since it
has become a critical node at the new position. This movement alerts the other
primary nodes (if any) at the previous location to choose a new backup for
themselves.
The second scenario is when the backup is also a critical node. In
this case, the backup node will notify its own backup so that the network stays
connected. This scenario may trigger a series of cascaded repositioning of
nodes. The third scenario is when the failed (primary) and its backup are both
critical nodes and simultaneously serving as backup for each other.
This scenario is articulated in Figure 6 Actor B detects the failure
of F as both are mutually serving as backup for each other as shown in
Figure 2.6(a) and 2.6(b) shows that the node B selects another node’s’ as
backup. Then B sends a movement notification message and moves to the
position of F as shown in Figure 2.6(c). This movement triggers a series of
cascaded relocations as discussed below and is shown in Figure 2.6(d), with A
replacing B and C replacing A.
57 �
2.3.6 Performance Evaluation
2.3.6.1 Simulation parameters
The proposed scheme is evaluated through NS2 simulation. The
bounded region of 1000 x 1000 sq.m is used, in which nodes are placed in a
uniform distribution. The power levels of the nodes are assigned such that the
transmission range and the sensing range of the nodes are all 250 meters. In
the simulation, the channel capacity of mobile hosts is set to the same value: 2
Mbps. The distributed coordination function (DCF) of IEEE 802.11 is used
for wireless LANs as the MAC layer protocol. It has the functionality to
notify the network layer about link breakage. In the simulation, sensor nodes
of 200 are deployed in a 1000 m x 1000 m rectangular region for 50 seconds
of simulation time.
The simulated traffic is Constant Bit Rate (CBR). To measure the
performance of different protocols under different ratios of communication
range/sensing range, the communication range is varied by 250,300,350 and
450m, in the network interface. All experimental results presented in this
section are averages of five runs on different randomly chosen scenarios. The
following Table 2.2 summarizes the simulation parameters used.
�
58 �
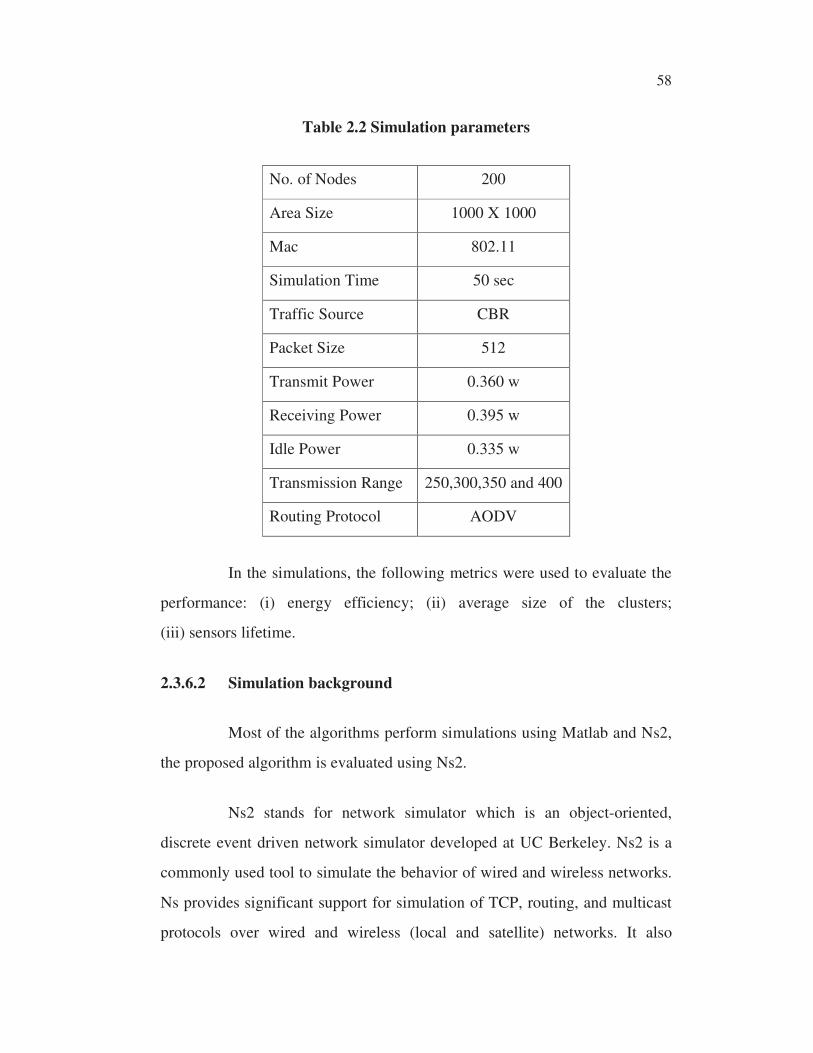
Table 2.2 Simulation parameters
No. of Nodes 200
Area Size 1000 X 1000
Mac 802.11
Simulation Time 50 sec
Traffic Source CBR
Packet Size 512
Transmit Power 0.360 w
Receiving Power 0.395 w
Idle Power 0.335 w
Transmission Range 250,300,350 and 400
Routing Protocol AODV
In the simulations, the following metrics were used to evaluate the
performance: (i) energy efficiency; (ii) average size of the clusters;
(iii) sensors lifetime.
2.3.6.2 Simulation background
Most of the algorithms perform simulations using Matlab and Ns2,
the proposed algorithm is evaluated using Ns2.
Ns2 stands for network simulator which is an object-oriented,
discrete event driven network simulator developed at UC Berkeley. Ns2 is a
commonly used tool to simulate the behavior of wired and wireless networks.
Ns provides significant support for simulation of TCP, routing, and multicast
protocols over wired and wireless (local and satellite) networks. It also
59 �
supports applications like web caching too. And also it implements network
protocols such as TCP and UDP, traffic source behavior such as FTP, Telnet,
Web, CBR and VBR, router queue management mechanism such as Drop
Tail, RED and CBQ, routing algorithms. As well Ns2 implements
multicasting and some of the MAC layer protocols for LAN simulations.
Ns2 Simulator is based on two languages: an object oriented
Simulator, written in C++, and an OTcl (an object oriented extension of Tcl
(Tool Command Language)) interpreter, used to execute user’s command
scripts. The simulator is based on two class hierarchies: the compiled C++
hierarchy and the interpreted OTcl one, with one to one correspondence
between them. There are two specifications that have to be achieved by the
simulator, so these two languages are used by ns. Detailed simulations of
protocols need a systems programming language which can competently
manipulate bytes, packet headers, and implement algorithms.
The compiled C++ hierarchy achieves efficiency in the simulation
and faster execution times, and reduces packet and event processing time. In
the OTcl script provided by user the particular network topology, the specific
protocols, the applications which will be simulated, and the form of the output
can be defined. The OTcl can make use of objects compiled in C++ through
an OTcl linkage that creates a matching of OTcl object for each of the C++.
The code to interface with the OTcl interpreter resides in a separate directory,
tclcl. The rest of the simulator code resides in the Ns2 directory.
The most important six classes that are used in Ns2: The Class Tcl,
containing the methods that C++ code will use to access the interpreter, the
class TclObject, the base class for all simulator objects that are also mirrored
in the compiled hierarchy. The class TclClass, defining the interpreted class
60 �
hierarchy, and the methods to permit the user to instantiate TclObjects, the
class TclCommand, used to define simple global interpreter commands, the
class EmbeddedTcl containing the methods to load higher level built-in
commands that make configuring simulations easier, and the class InstVar
containing methods to Access C++ member variables as OTcl instance
variables.
Ns2 includes a tool for viewing the simulation results, called Nam,
the network animator. Nam is a Tcl/Tk based animation tool to visualize the
network simulation traces and real world packet trace data. The design theory
behind nam is to create an animator that is able to read large animation data
sets and be extensible enough so that it could be used in different network
visualization situations. Under this constraint nam is designed to read simple
animation event commands from a large trace file. In order to handle large
animation data sets a minimum amount of information is kept in memory.
Event commands are kept in the file and re-read from the file whenever
necessary.
To sum up ns is an object-oriented, discrete event driven network
simulator. Since ns is an extensible and an open source program, it is suitable
for academic and educational purposes. Moreover it is possible to create new
algorithms using a rich library of network and protocol objects.
2.3.6.3 Energy efficiency
It is assumed that the BN has two level transmission power with the
transmission radii � and �= 2�, respectively. First, 100 sensor nodes are
deployed randomly and the transmission radius � is set to 15 meters. For
example, when n = 100 and the battery/network lifetime ratio is�
. Both
61 �
homogeneous and heterogeneous battery states are considered. In the
homogeneous case, every node has the same battery/network lifetime ratio
vi, but in heterogeneous case vi is a random variable uniformly distributed in
[v/2, 3v/2], with vi as the average ratio.
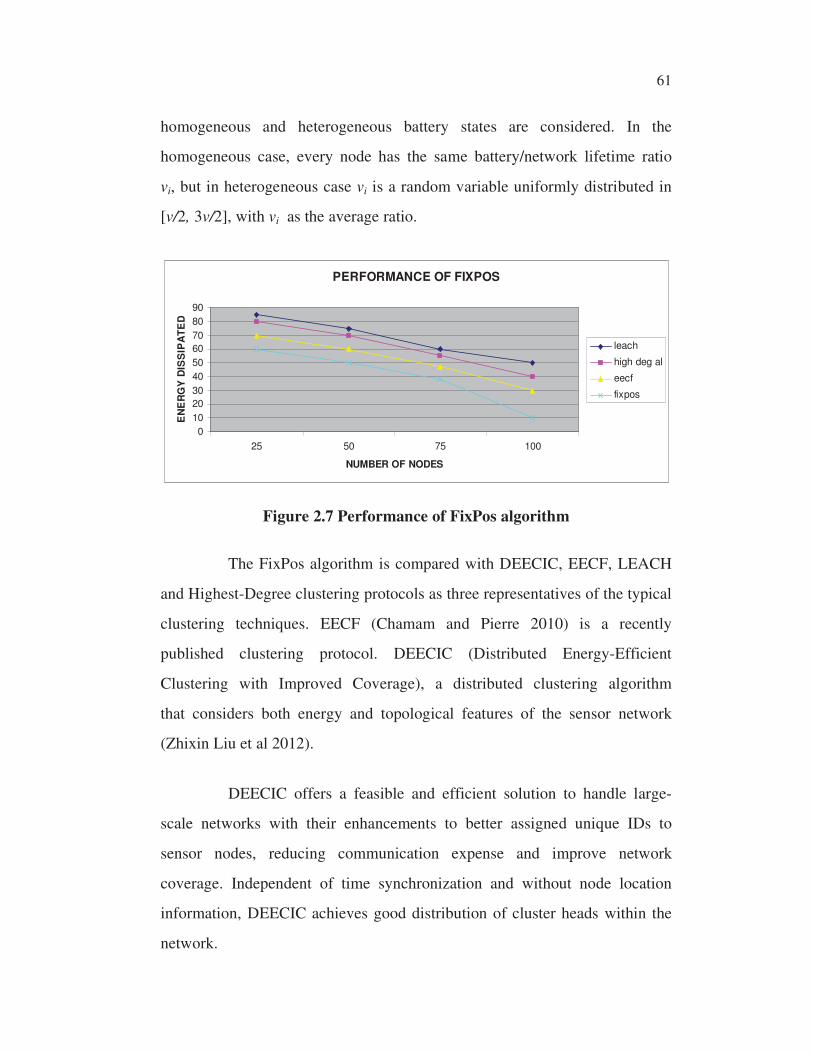
Figure 2.7 Performance of FixPos algorithm
The FixPos algorithm is compared with DEECIC, EECF, LEACH
and Highest-Degree clustering protocols as three representatives of the typical
clustering techniques. EECF (Chamam and Pierre 2010) is a recently
published clustering protocol. DEECIC (Distributed Energy-Efficient
Clustering with Improved Coverage), a distributed clustering algorithm
that considers both energy and topological features of the sensor network
(Zhixin Liu et al 2012).
DEECIC offers a feasible and efficient solution to handle large-
scale networks with their enhancements to better assigned unique IDs to
sensor nodes, reducing communication expense and improve network
coverage. Independent of time synchronization and without node location
information, DEECIC achieves good distribution of cluster heads within the
network.
PERFORMANCE OF FIXPOS
0
10
20
30
40
50
60
70
80
90
25 50 75 100
NUMBER OF NODES
EN
ER
GY
DIS
SIP
AT
ED
leach
high deg al
eecf
fixpos
62 �
DEECIC is also a fast and locally scalable: since sensor nodes are
energy-constrained, frequently receiving data from common nodes and
forwarding them to the base station will consume a large amount of energy on
cluster heads, DEECIC can achieve re-clustering within constant time and in a
local manner. In EECF, a sensor’s eligibility to be elected as cluster head is
based on its residual energy and its degree. However, cluster heads also act as
data relays, since they route received data from peer cluster heads toward the
base station, either directly if the base station is within their transmitting
ranges or through a neighboring cluster head if the base station is beyond
transmitting range. LEACH (Chandrakasan et al 2004) was proposed for an
application in which nodes are randomly distributed in a square area.
In LEACH, nodes continuously sense the environment, and then
send data packets to the base station. LEACH rotates the cluster heads in
every round, with an aim at prolonging the network lifetime. Similarly to
proposed scheme, the Highest-Degree algorithm (Gerla and Tsai 1995) known
as connectivity-based clustering, selects the nodes with the maximum number
of neighbors as cluster heads. Note that all the tested clustering algorithms use
the same parameters in each simulation.
It is observed that FixPos algorithm has more nodes alive than
EECF and the other two algorithms with the increment of rounds which is
shown in Figure 2.7. Since Fixpos algorithm chooses the node based on the
level of energy ‘E’ also in clustering the cluster head replaces the current
cluster head whose current energy is less than the backup node energy, this
mechanism can balance the energy consumption of the nodes and reduce the
loss of cluster heads. LEACH randomly selects the cluster heads in the
network and does not consider the energy of the nodes. In the Highest-Degree
63 �
algorithm, once a cluster head is selected, it continues to relay data until the
energy is used up, which may result in faster death of some nodes.
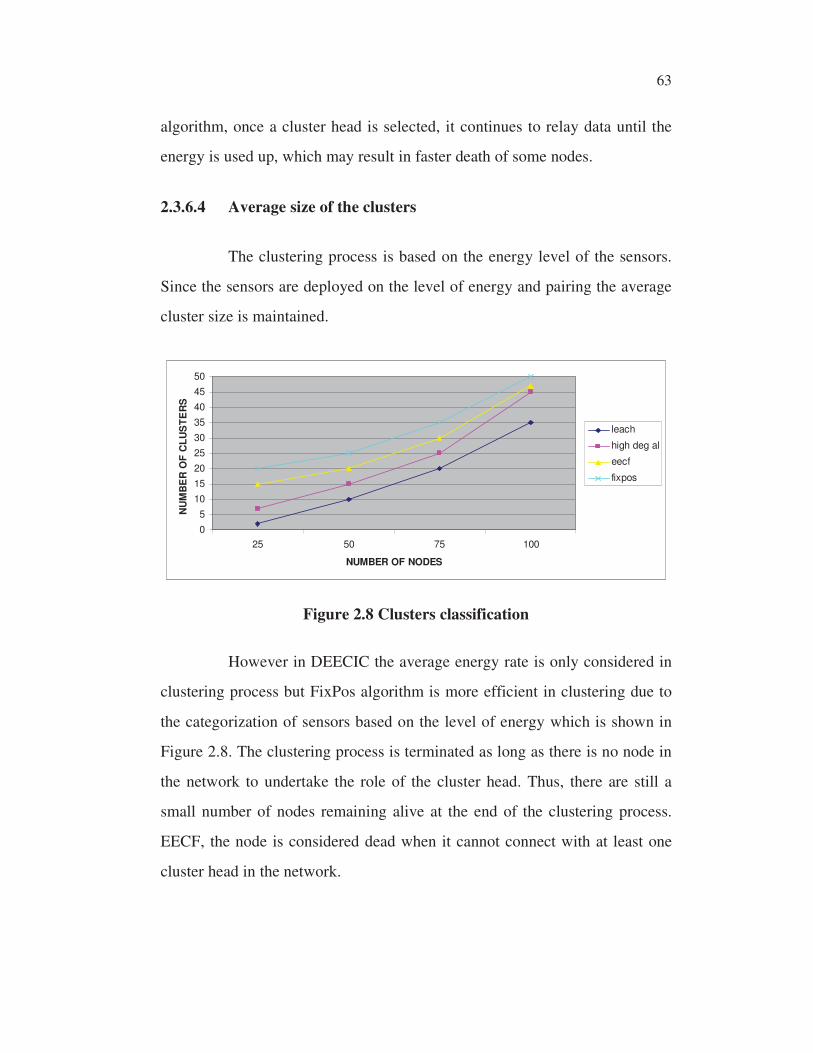
2.3.6.4 Average size of the clusters
The clustering process is based on the energy level of the sensors.
Since the sensors are deployed on the level of energy and pairing the average
cluster size is maintained.
Figure 2.8 Clusters classification
However in DEECIC the average energy rate is only considered in
clustering process but FixPos algorithm is more efficient in clustering due to
the categorization of sensors based on the level of energy which is shown in
Figure 2.8. The clustering process is terminated as long as there is no node in
the network to undertake the role of the cluster head. Thus, there are still a
small number of nodes remaining alive at the end of the clustering process.
EECF, the node is considered dead when it cannot connect with at least one
cluster head in the network.
0
5
10
15
20
25
30
35
40
45
50
25 50 75 100
NUMBER OF NODES
NU
MB
ER
OF
CL
US
TE
RS
leach
high deg al
eecf
fixpos
64 �
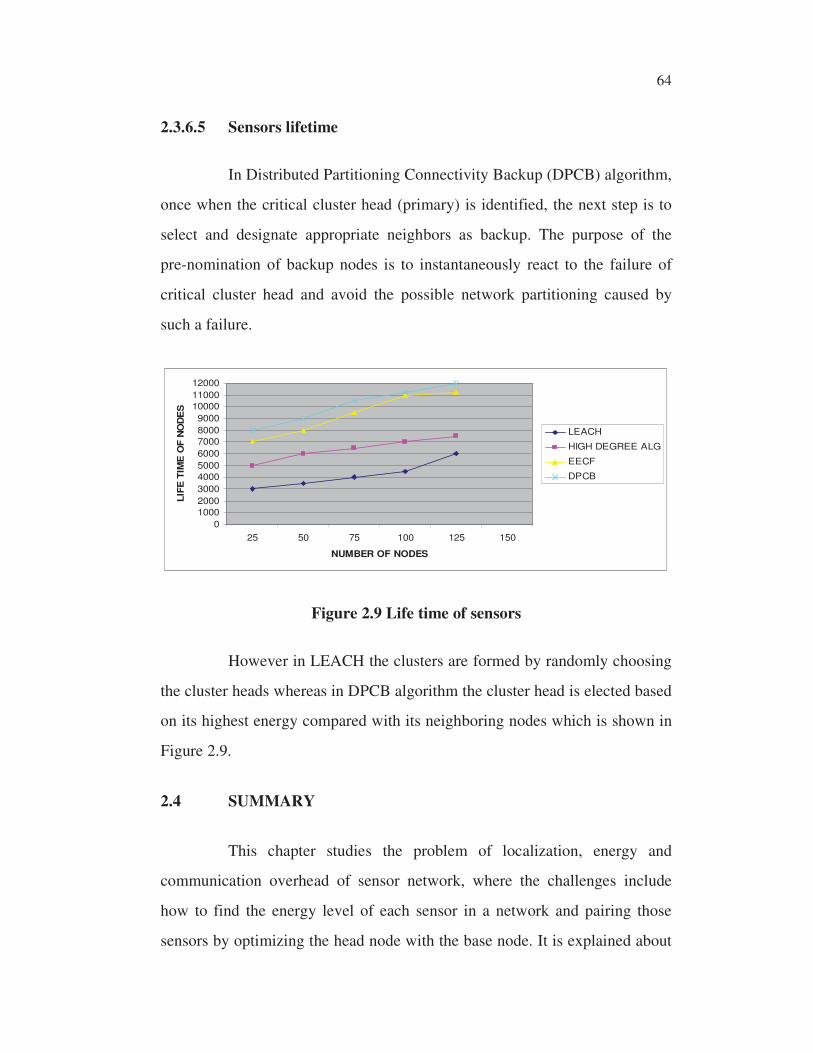
2.3.6.5 Sensors lifetime
In Distributed Partitioning Connectivity Backup (DPCB) algorithm,
once when the critical cluster head (primary) is identified, the next step is to
select and designate appropriate neighbors as backup. The purpose of the
pre-nomination of backup nodes is to instantaneously react to the failure of
critical cluster head and avoid the possible network partitioning caused by
such a failure.
Figure 2.9 Life time of sensors
However in LEACH the clusters are formed by randomly choosing
the cluster heads whereas in DPCB algorithm the cluster head is elected based
on its highest energy compared with its neighboring nodes which is shown in
Figure 2.9.
2.4 SUMMARY
This chapter studies the problem of localization, energy and
communication overhead of sensor network, where the challenges include
how to find the energy level of each sensor in a network and pairing those
sensors by optimizing the head node with the base node. It is explained about
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
11000
12000
25 50 75 100 125 150
NUMBER OF NODES
LIF
E T
IME
OF
NO
DE
S
LEACH
HIGH DEGREE ALG
EECF
DPCB
65 �
the active nodes and sleep nodes state where the scope of each node is
responsible for increasing the lifetime of the network. It is examined the
formation of clusters with balancing number of slave nodes in each cluster.
The optimal cluster size is maintained to minimize the average energy
consumption rate per unit area for a network. The proposed DPCB algorithm
uses a back off strategy which is used to minimize the communication
overhead issue that simultaneously increases the network coverage. Various
scenarios are presented to show the scope of recovery which depends on the
position of the backup node. Our simulation results validate this computation,
and show the improvement of overcoming the communication overhead.

























