Embed Size (px)
Citation preview

Chapter 4
Newton’s Third Law
4.1 Lecture
In this lesson, we will analyze our first multi-body system, where the motion of two bodies arenot only influenced by gravity and external constraints (such as the ramp), but the motion ofeach body is also influenced by the motion of the other body. This concept of multiple partsmoving relative to one another in an inter-connected way is the basis of the entire branchof design and product development in mechanical engineering. In your Engineering DesignTools course, you will learn about how to construct complicated systems, how to model themwith computer aided design packages, and how to manufacture them in the machine shop.In this Engineering Mechanics Lab course, you will learn how to analyze these systems usingthe core principles of engineering science, and model them using the tools of measurement,modeling, and simulation. These two courses provide a strong foundation for the rest of youracademic and professional career.
4.1.1 Formulate
State the Problem
A system consists of two masses, m1
and m2
, and an ideal pulley, P . The masses m1
, m2
,and pulley P interact by means of an ideal cable. The first mass m
1
is positioned on arough-surface ramp inclined at an angle ✓ to the horizontal. The ideal cable connects frommass m
1
over the ideal (frictionless) pulley P to m2
. The second mass m2
is suspendedfrom the ideal cable. The ideal cable is of a constant length. The system is released fromrest and allowed to move due to the action of gravity. Experimentally estimate the mean(time-average) tangential acceleration, a
1s, of the first mass, m1
, at a constant ramp angle ✓when the suspended mass m
2
is allowed to vary over a range of at least three discrete values.Each lab group member shall adjust the apparatus to a unique angle ✓ and conduct a seriesof trials for various m
2
. Plot and report the mean tangential range acceleration, ar1, (withuncertainties) as a function of m
2
for various ramp angles ✓. Estimate, plot, and report the
160

dynamic coe�cent of friction, µd, (with uncertainties) as a function of m2
for various rampangles ✓.
Known Information
Prior to the experiment, we shall acquire several items of known information using standardmeasurement and observation techniques.
m1
= [kg] � Mass of Object 1 (Constant) (4.1)
m2
= [kg] � Mass of Object 2 (Constant) (4.2)
✓ = [deg] � Inclination Angle of Ramp (Constant) (4.3)
g = 9.81 [m/s2] � Standard value of gravitational acceleration (4.4)
L1
= [m] � Distance from transducer to pulley (Constant) (4.5)
L2
= [m] � Distance from floor to pulley (Constant) (4.6)
Desired Information
Upon conclusion of the experiment and analysis report:
PLOT : ar1 ± ✏a vs. m2
for ✓1
, ✓2
, ✓3
, ✓4
↵ (4.7)
PLOT : µd ± ✏µdvs. m
2
for ✓1
, ✓2
, ✓3
, ✓4
↵ (4.8)
4.1.2 Assume
µd = [�] � Constant, Uniform, Unknown (4.9)
f = µdN [N ] � Amontons’ First Law (4.10)
fair = 0 [N ] � Neglect Air Friction (4.11)
T = [N ] � Constant (4.12)
Lcable = [m] � Constant (4.13)
Fr/m1
= [N ] � Normal force between m1
and ramp (4.14)
r1
= 0 [m] � At transducer face (4.15)
s1
= 0 [m] � At pulley tangent (4.16)
r2
= 0 [m] � At pulley tangent (4.17)
s2
= 0 [m] � At room floor (4.18)
r1
(t) ⇡ {r1
(n)} = {r1
(1), r1
(2), · · · , r1
(Nt � 1), r1
(Nt)} [m] � (4.19)
t ⇡�t(n)
=�t(1), t(2), · · · , t(Nt � 1), t(Nt)
[s] � (4.20)
Equation 4.9 states that the dynamic coe�cient of friction, µd, is a constant for a particularcombination of block and ramp materials. The validity of this assumption will need to be
161

assessed at the end of the problem. We expect the friction coe�cient to be independentof inclination angle ✓ and external load m
2
. Equation 4.10 re-states Amontons’ First Lawfrom our previous analysis. The validity of this assumption will need to be assessed at theend of the problem. Equation 4.11 states that we are neglecting air friction throughout theproblem. Our current experiment does not include an investigation to study the validity ofthis assumption. Equation 4.12 is a mathematical consequence of the problem statement in-structing us to consider the pulley as ideal and frictionless. Our current experiment does notinclude an investigation to study the validity of this assumption. Equation 4.13 is a mathe-matical consequence of the problem statement instructing us to consider the cable as idealand fixed length. We shall study the deflection of thin elements in a subsequent experimentlater in the course. Equations 4.14 through 4.18 simply define our chosen terminology anddatums for the problem. We need to ensure that our drawings and analysis are consistentwith these assumptions.
Equation 4.19 is used to reflect our assumption that we will conduct an experiment tomeasure the range (the displacement from the transducer face) of mass m
1
as a function oftime using a transducer, and calibration curve to convert voltage into displacement. Thus,rather than having an analytical expression for r
1
(t) we will have a column of data pointsthat we will store in a spreadsheet. We state that we will have Nt time samples of datafrom the transducer. The symbol r(n) indicates an experimental estimate (at some discretetime sample number n) of the theoretical range, r(t). Equation 4.20 indicates that ourexperimental data file will also contain a column of Nt time samples, which we denote ast(n) to indicate the relative time at which each corresponding voltage (and hence distance)sample was acquired. While the physical time t is a continuous function, we only have samplesavailable at our distinct sampling times, which we call t. We use the index, 1 n Nt, toindicate which time sample we are interested in.
4.1.3 Chart
Schematic Diagram
A schematic diagram of the stated problem is shown in Figure 4.1. The datums, nomencla-ture, and system boundary are drawn in a manner consistent with the problem formulation.We choose the origin of the cartesian coordinate system to be where the cable tangentiallywraps around the pulley from the left approach.
Free Body Diagrams
The free body diagrams for the objects within the system boundary (m1
, m2
, and P ) areshown in Figure 4.2. The mass m
1
experiences a force due to gravity in the magnitude m1
g,directed towards the center of the Earth. This force due to gravity is resisted by a forceacting normal to the surface, shown as the reaction Fr/m1
, which prevents the object fromfalling through the ramp surface. The tangential force fm1
in the FBD represents the frictionbetween m
1
and the ramp. The cable is taken to exert a tension force T on the object m1
.
162

Figure 4.1: Schematic Diagram of two bodies in relative motion.
Since the cable is in tension, the force is directed away from the body, and towards thepulley. At this point it is convenient to recall the old adage “you can’t push on a rope.” Theunit vectors are noted in the FBD to remind us of the “sense” or “positive directions” forthe chosen coordinate system. The FBD of the second mass, m
2
, shows only two forces. Thedownward force due to gravity, m
2
g and an upward force due to the cable tension, T . Next,we look at the pulley assembly. The pulley serves to change the direction of the tension forcebut, due to our assumption that it is an ideal frictionless pulley, does not change the valueof the tension T as it wraps around the arc of the pulley. A high quality pulley introducesrelatively little friction into a system already in motion. This is particularly true when thetension in the cable is modest, as in this case. Pulleys under heavy loading, such as in thecase of a heavy lift elevator or block and tackle may introduce significant friction into thesystem. The fact that the tension on the two sides of the pulley is in di↵erent directionsinduces a reaction denoted FP at the pulley mount point.
We choose not to include FBDs for the ramp, supports, table, floor, and the Earth sincethey lie outside the system boundary. A quick review of Newton’s third law confirms thatthe equal and opposite reactions to the unbalanced forces in Figure 4.2 lie outside of thesystem boundary.
163

Figure 4.2: Free Body Diagrams for a pulley assembly and two bodies in relative motion.
Vector Diagram
A force vector diagram for the mass m1
is shown in Figure 4.3. The FBDs are an excellent
Figure 4.3: Force Vector Diagram for mass m1
.
place to begin the force vector diagrams. If we compare the FBD for m1
from Figure4.2 to the vector diagram in Figure 4.3, we shall see a one-to-one correspondance. In thevector diagram, we choose to break the weight of the mass, m
1
g into two components –one component tangential to the ramp, and a second component normal to the surface ofthe ramp. We note that the tension, T is applied at an angle ✓ to the horizontal, andis parallel to the ramp surface. This vector diagram for m
1
suggests that we will analyzethe motion of the mass as having tangential components (along the ramp) and normalcomponents (perpendicular to the ramp). Note that it is equally accurate to consider themotion components as aligned with the horizontal x and vertical z axes if desired.
164

4.1.4 Execute
Recall The Governing Equations.
The first step in the execution phase is to recall the relevant governing equations. In thiscase, we recall Newton’s laws.
If:X�!
F = 0 Then: �!a = 0 Newton’s 1st Law (4.21)
X�!F =
d(m�!V )
dt=
d�!pdt
Newton’s 2nd Law (4.22)
�!F Action = ��!
F Reaction Newton’s 3rd Law (4.23)�!F g = g ·m # Newton’s Law of Gravity near Earth (4.24)
Simplify the Governing Equations.
Newton’s Second Law may be applied to mass m2
, using the horizontal and vertical compo-nents of vectors, as follows:
X�!F on m2
=
m2
= Constant by Eq.4.2z }| {d(m
2
�!V
2
)
dt(4.25)
= m2
d(�!V
2
)
dt(4.26)
= m2
�!a2
(4.27)
= m2
⇣a2xı+ a
2sk⌘
(4.28)X
horizontal
(F2x) ı+
X
vertical
(F2s) k = m
2
⇣a2xı+ a
2sk⌘
(4.29)
From the FBD for mass m2
in Figure 4.2, we can write
X
horiz
F2xı = 0ı (4.30)
X
vert
F2sk = (T �m
2
g) k (4.31)
Use Equations 4.30 and 4.31 in 4.29 to write the horizontal and vertical scalar componentequations for mass m
2
.
m2
a2x = 0 (4.32)
[kg][m/s2] = [N ] Units Validation
165

m2
a2s = T �m
2
g (4.33)
[kg][m/s2] = [N ]� [kg][m/s2] Units Validation
Newton’s Second Law may be applied to mass m1
as follows, using the normal and tangentialcomponents of the vectors:
X�!F on m1
=
m1
= Constant by Eq.4.1z }| {d(m
1
�!V
1
)
dt(4.34)
= m1
d(�!V
1
)
dt(4.35)
= m1
�!a1
(4.36)
= m1
�a1nn+ a
1st�
(4.37)X
normal
(F1n) n+
X
tangential
(F1s) t = m
1
�a1nn+ a
1st�
(4.38)
From the FBD for mass m1
in Figure 4.2 in conjunction with the force vector diagram ofFigure 4.3, we can write
X
normal
F2nn =
�Fr/m1
�m1
g cos ✓�n (4.39)
X
tangent
F2st = (fm1
�m1
g sin ✓ � T ) t (4.40)
Use Equations 4.39 and 4.40 in 4.38 to write the normal and tangential scalar componentequations for mass m
1
.
m1
a1n = Fr/m1
�m1
g cos ✓ (4.41)
[kg][m/s2] = [N ]� [kg][m/s2][�] Units Validation
m1
a1s = fm1
�m1
g sin ✓ � T (4.42)
[kg][m/s2] = [N ] + [kg][m/s2][�]� [N ] Units Validation
Amontons’ First Law, Equation 4.10, allows us to write the sliding friction fm1
in terms ofthe normal component of the weight as
fm1
= µdm1
g cos ✓ (4.43)
Using Equation 4.43 in 4.42 we get
m1
a1s = µdm1
g cos ✓ �m1
g sin ✓ � T (4.44)
[kg][m/s2] = [�][kg][m/s2][�]� [kg][m/s2][�]� [N ] Units Validation
166

Inventory
We have simplified Newton’s Second Law as it applies to the masses m1
and m2
. Let’sconduct an inventory of the simplified equations to determine if su�cient information isavailable to obtain a solution for the motion of both masses. Recall Equations 4.32, 4.33,4.41, and 4.44.
m2
a2x = 0 (4.45)
�↵ = � Inventory
m2
a2s = T �m
2
g (4.46)
�↵ = ↵��� Inventory
m1
a1n = Fr/m1
�m1
g cos ✓ (4.47)
�↵ = ↵���� Inventory
m1
a1s = µdm1
g cos ✓ �m1
g sin ✓ � T (4.48)
�↵ = ↵��������↵ Inventory
Reviewing these equations shows that we have seven unknown values: a2x, a2s, a1n, a1s, T ,
Fr/m1
and µd. We have four independent equations. We do not yet have enough informationto solve the problem. It is useful at this point to consider whether there is accelerationin all directions of our coordinate system. For mass m
1
, we can assume that there is noacceleration in the normal direction, since the ramp is a rigid surface. Thus,
a1n = 0 � [m/s2] (4.49)
This assumption states that the mass m1
is not permitted to move in a direction normalto the surface of the ramp. That is, we assume that the ramp does not deform under theweight of the load. This is a valid assumption for our laboratory apparatus. Our inventorynow stands at 7 unknowns and 5 independent equations. We need two more independentequations. We have already used most of our simplifying assumptions in our analysis. Weimplicitly invoked the assumption of neglecting air friction, Equation 4.13, by excluding theair friction forces from the free body diagrams for m
1
and m2
.Next, we consider how the position vs. time data that is measured in the experiment can
be used to find additional expressions. Refer to Figure 4.1. From this figure, we can writethat
s1
(t) = L1
� r1
(t) (4.50)
s2
(t) = L2
� r2
(t) (4.51)
We can take the first derivative of both sides of Equation 4.50 to find the tangential velocity,V1s, of mass m
1
in terms of the experimentally observed history for the range of the mass,
167

r1
(t):
d
dt(s
1
(t)) =dL
1
dt� d
dt(r
1
(t)) (4.52)
V1s(t) = 0� d
dt(r
1
(t)) (4.53)
since the time rate of change of a constant is zero. We take the second derivative to arriveat the tangential acceleration, a
1s, of mass m1
:
d
dt(V
1s(t)) = � d2
dt2(r
1
(t)) (4.54)
a1s(t) = � d2
dt2(r
1
(t)) (4.55)
[m/s2] =[1]
[s2][m] Units Validation
↵ = � Inventory
Equation 4.55 provides us with one more independent equation (when we collect a set ofexperimental data for r
1
(t)). Our inventory now stands at 7 unknowns and 6 independentequations. We still need one more independent equation.
We have not yet employed the knowledge that the cable is of fixed length, as instructed inthe problem statement, and reflected in Equation 4.13. This is an essential fact for solvingthis problem. This type of constraint, which restricts the manner in which two objectscan move relative to one another is called a “kinematic constraint.” Equations that resultfrom these motion constraints are called “kinematic equations.” Kinematic equations donot follow from Newton’s laws directly. Rather, they follow from the geometry that we, asengineers, build into our machines and devices. Thus, kinematics are a very important toolfor engineers! Let’s study the implications of the assumption that Lcable = Constant. Onceagain referring to Figure 4.1 and Equation 4.51, we can similarly write for mass m
2
:
d
dt(s
2
(t)) =dL
2
dt� d
dt(r
2
(t)) (4.56)
V2s(t) = 0� d
dt(r
2
(t)) (4.57)
d
dt(V
2s(t)) = � d2
dt2(r
2
(t)) (4.58)
a2s(t) = � d2
dt2(r
2
(t)) (4.59)
[m/s2] =[1]
[s2][m] Units Validation
This seems to be an improvement, until we recognize that r2
(t) appears to be an unknownquantity. We still need one more equation. Kinematics to the rescue! Since the length of
168

the cable is assumed to be constant, then we can state by virtue of the kinematic constraintLcable = Constant that
d
dt(r
2
(t)) =d
dt(r
1
(t)) (4.60)
The distance between the transducer and mass m1
is not the same as the distance betweenthe pulley and m
2
. However, the speed at which m1
recedes from the transducer is identicalto the speed at which m
2
moves away from the pulley. Since the cable length is constant, wecan also take the derivative of Equation 4.60 to get
d2
dt2(r
2
(t)) =d2
dt2(r
1
(t)) (4.61)
Now, we substitute Equation 4.61 into Equation 4.59 to arrive at our final independentequation:
a2s(t) = � d2
dt2(r
1
(t)) (4.62)
We have 7 independent equations and 7 unknowns. We can now solve the system of equations.
Solve
We begin by solving Equation 4.32 to get
a2x = 0 (4.63)
[m/s2] = [m/s2] Units Validation
Now, use substitute Equation 4.49 into Equation 4.41 and solve for the normal reaction force:
Fr/m1
= m1
g cos ✓ (4.64)
[N ] = [kg][m/s2][�] Units Validation
We know from past experience that estimating the instantaneous acceleration from exper-imental data introduces a high level of uncertainty. However, we have also observed thatcomputing a time average mean value of the acceleration results in a modest standard errorfor the mean.
We can approximate the first derivative of the sensor-to-object distance using a centraldi↵erence approximation to arrive at the speed of departure:
Vr1(n) =d
dt(r
1
(n)) =r1
(n+ 1)� r1
(n� 1)
t(n+ 1)� t(n� 1)8 2 n Nt � 1 (4.65)
The acceleration equals the first derivative of velocity and the second derivative of range as
ar1(n) =d
dt
⇣Vr1(n)
⌘⇡ Vr1(n+ 1)� Vr1(n� 1)
t(n+ 1)� t(n� 1)8 3 n Nt � 2 (4.66)
169

The mean acceleration is computed by
ar1 =1
Nt � 4
n=Nt�2X
n=3
(ar1(n)) (4.67)
By virtue of Equation 4.62 we can estimate the time average acceleration of mass m1
andm
2
as:a2s = �ar1 (4.68)
We can substitute our mean value of the vertical acceleration, a2s, into Equation 4.33 to
get the nominal tension, T , in the cable:
T = m2
(g � ar1) (4.69)
[N ] = [kg]�[m/s2] + [m/s2]
�Units Validation
Now, use the tension from Equation 4.69 in Equation 4.44 to estimate the nominal value ofthe dynamic coe�cient of friction, µd in terms of a
1s or alternatively, ar1:
µd = tan ✓ +a1s
g cos ✓+
T
m1
g cos ✓(4.70)
µd = tan ✓ � ar1g cos ✓
+T
m1
g cos ✓(4.71)
[�] = [�] +[m/s2]
[m/s2][�]+
[N ]
[kg][m/s2][�]Units Validation
We substitute Equation 4.69 into Equation 4.71 to get
µd = tan ✓ � ar1g cos ✓
+m
2
m1
(g � ar1)
g cos ✓(4.72)
[�] = [�] +[m/s2]
[m/s2][�]+
[kg]
[kg]
[m/s2]� [m/s2]
[m/s2][�]Units Validation
Equation 4.72 is convenient due to the fact that all terms on the right hand side are eitherknown or will be obtained as a result of the Lab experiment.
4.1.5 Test
Validate
We have verified that the units on each result are correct. Upon completion of the experimentand analysis, we should determine if the signs on the results are consistent with the signconvention assumed in the analysis. If any sign discrepancies arise, then these should bereviewed as potential indicators of error. We expect a positive value for ar1 at values ofsignificantly higher than the friction angle, ✓ >> ✓s. We expect negative values for as1 andas2 when ✓ >> ✓s.
170

Verify
In lab, we will conduct an experiment to measure the motion of the object down an inclinedplane. We will use many of the skills learned during the first two weeks to conduct thisexperiment. Following the lab, we should report our findings of all desired quantities assupported by experimental data. We should compare the observed acceleration of the object,and compare our measured results with those obtained for the free fall experiment.
In an e↵ort to attain the most accurate value for µd, it is important that we conductexperimental trials at angles significantly away from the friction angle, ✓s. The best es-timates for µd will be obtained when we obtain smooth motion with a clear acceleration.Furthermore, we hypothesize that the value of µd should be independent of angle, ✓, sinceAmontons’ First Law contains no mention of angle. As the angle ✓ is increased, the labgroup will need to take care not to let the object tumble to the ground, and avoid breakage.
Apply Intuition
Equation 4.62 states that the vertical acceleration of m2
is identical to the tangential accel-eration of m
1
. This makes sense for a cable in constant tension of constant length. Equation4.63 states that mass m
2
does not accelerate in the horizontal direction, which is intuitivelycorrect. Equation 4.64 for the normal force is consistent with our previous experience inChapter 3. When we consider the case of ✓ >> ✓s, we expect m
1
to accelerate down theramp such that ar1 > 0, and Equation 4.69 states that the tension in the cable is less thanthe dead weight of m
2
. This also is intuitively correct. Finally, in the limiting case whenm
2
! 0 the tension in the cable is T ! 0, and Equation 4.70 reduces to the same resultthat we achieved in Chapter 3. This is reassuring – even tough we did numerous algebraicsteps, our result reduces to a simpler form that we have seen previously.
4.1.6 Iterate
We will verify the theoretical results obtained in our laboratory experiment. When choosingangles ✓ for the experimental trials, it will be prudent to select a variety of angles. Eachstudent is expected to conduct a series of trials with various values of m
2
for at least oneangle ✓. However, if time permits, it may be valuable for the group to conduct multipletrials and multiple angles, such that collectively the team explores a wide range of anglesand counter-weights. It is generally easier to conduct multiple trials while you are in thelab, rather than taking limited data, going to Studio, and then realize that you would havepreferred to collect more data!
171

4.2 Lab - System of Bodies in Constrained Motion
4.2.1 Scope
This week in lab you will use a transducer to measure the position of a block as a functionof time as it slides along an inclined surface, just as you did last week, except that now theblock is connected to a falling mass through a cable and pulley system. The motions of thetwo masses are now coupled together in an arrangement often referred to as an Atwood’sMachine.
4.2.2 Goal
The goals of this laboratory experiment are to
1. acquire voltage vs. time data with an automated data acquisition system,
2. convert the voltage vs. time data into range vs. time,
3. estimate the instantaneous tangential position and velocity of the object as it moves,
4. estimate the mean tangential acceleration of the object during the motion interval,
5. confirm our understanding of Newton’s Third Law of Motion,
6. understand the importance of kinematics in engineering.
4.2.3 Units of Measurement to use
Measurements may be conducted in a combination of customary U.S. units and S.I. unit.All results shall be reported in the SI system of units.
Table 4.1: Units of Measurement to be used for object in constrainted linear motion.Quantity Customary units SI units
Time [s] [s]Voltage [V ] [V ]Length [inch] or [ft] [m]Velocity [inch/sec] or [ft/s] [m/s]
Acceleration [inch/sec2] or [ft/s2] [m/s
2]Mass [slugs] [kg]Force [pounds] = [slug feet/s
2] [N ] = [kg m/s
2]Angle [degrees] [radians] or [degrees]
Friction Coe�cient [�] [�]
172

4.2.4 Reference Documents
Review the materials from previous chapters related to the ultrasonic sensor and its properusage, and especially review the concepts from Chapter 3 as background.
4.2.5 Terminology
The following terms must be fully understood in order to achieve the educational objectivesof this laboratory experiment.
Length Voltage Time Speed Velocity TimeHorizontal Vertical Component Normal Tangential VectorMagnitude Direction Static Dynamic Constraint ScalarResultant Commutative Law Unit vector Negation Unit AngleOrigin Associative Law Sliding Rolling Kinematic AxisInclination Amontons’ 1st Law Traction Incipient Friction TensionConstraint Inclinometer Hypothesis
4.2.6 Summary of Test Method
On the myCourses site for this course you will find links to one or more videos on YouTubefor this week’s exercise. Watch all of the available videos, and complete the online lab quizfor the week. The videos are your best reference for the specific tasks and procedures tofollow for completing the laboratory exercise.
4.2.7 Calibration and Standardization
The Lead Technologist and Assistant Technologist shall calibrate the ultrasonic transducerto determine the relationship between position and voltage, using an approach similar tothat of week 1, prior to conducting trials of the current experiment. The same calibrationsoftware VI used during the week 1 experiment shall be used to manually record calibrationdata for the ultrasonic transducer. The entire team may use one calibration curve for theultrasonic transducer. The inclinometer will be used as a primary instrument in this class.However, it is necessary to calibrate the instrument at a known angle to set the “zero angle”for the instrument. The Lead Technologist is responsible for calibrating the “zero angle” ofthe angle sensor, using an approach similar to that described in week 3.
4.2.8 Apparatus
All required apparatus and equipment components are described and demonstrated in theinstructional videos for this exercise or will be familiar from common or previous use.
173

4.2.9 Measurement Uncertainty
In Lab 1, we learned about measurement uncertainty. In Lab 2, we learned about the prop-agation of uncertainty due to numerical di↵erentiation (addition and subtraction), and theinfluence of data averaging on the standard uncertainty of an average. In Lab 3, we learnedabout the propagation of uncertainty through mathematical operations such as multipli-cation and trigonometric functions. We also covered in Studio how we can compare themagnitudes of the relative uncertainties of the di↵erent variables to help simplify the com-pound uncertainty expression. Let’s review that briefly here, because a similar approach willbe very helpful for this week’s uncertainty analysis.
Summarized below are select equations to uncertainties resulting from Week 3 Studiocalculations.
✏tan ✓s = ±0.5 |tan(✓ + ✏✓s)� tan(✓ � ✏✓s)| (4.73)
✏sin ✓s = ±0.5 |sin(✓ + ✏✓s)� sin(✓ � ✏✓s)| (4.74)
✏cos ✓s = ±0.5 |cos(✓ + ✏✓s)� cos(✓ � ✏✓s)| (4.75)
✏µs = ✏tan ✓s (4.76)
✏µd= ±
✏tan ✓ +
as,avg(g cos ✓)
✏as,avgas,avg
+✏cos ✓
cos ✓
��(4.77)
✏f = ±f
✏µd
µd
+✏m
1
m1
+✏gg+
✏cos ✓
cos ✓
�(4.78)
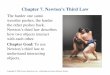
The last two expressions, for µd and f are shown for the case where we assume all thevariables’ contribute significantly to the compound uncertainty of these calculated values.For reference, a screen capture of last week’s Excel sheet is shown in Figure 4.4. Note thatthe magnitude of the relative uncertainty for all the contributing variables highlighted inthe red rectangle are at least ten-fold less than that of the mean tangential acceleration.This means that the other variables can be treated as constants when considering compounduncertainties�at least to a reasonable first approximation. As an example, consider theequation for µd from Week 3:
µd = tan ✓ +as
g cos ✓from Week 3 (4.79)
From the relative uncertainties of the variables in this equation shown in Figure 4.4, it isclear that the only one that will contribute significantly to µd’s compound uncertainty is themean acceleration. For the purposes of deriving a compound uncertainty equation for µd wecould recast Equation 4.79 as follows:
µd = K1
+K2
as, (4.80)
where constants K1
and K2
are tan ✓ and 1/(g cos ✓), respectively. If we inspect the Uncer-tainty section of the Engineering Reference Table, we will see that the uncertainty for thisexpression is simply:
174

✏µd= ±K
2
✏as (4.81)
or, after substituting for K2
:
✏µd= ± ✏as
g cos ✓(4.82)
Thus, by realizing that terms involving ✓ in Equation 4.79, we were able to simplify theuncertainty expression substantially from Equation 4.77 to 4.82. Furthermore, the valuescalculated for these two expressions are 0.286 for the full expression vs. 0.285 for the simplifiedone. Clearly, our assumption that terms involving ✓ can be treated as constants whenderiving the uncertainty is a robust one. Use this same approach in this week’s analysis ofyour calculated values for T , µd, and f . This will be discussed in more detail during Studio.
Figure 4.4: Screen capture of Week 3’s uncertainty analysis showing how the relative un-certainty magnitudes of all of the variables are much less than that of the mean tangentialacceleration. This fact can be used in determining the compound uncertainty expressions forcalculated items such as the coe�cient of dynamic friction, tension force, and friction force.
4.2.10 Preparation of Apparatus
All required equipment for conducting the laboratory exercise is made available either withinone or both of the drawers attached to the lab bench or from the laboratory instructor. You
175

are expected to bring all other necessary materials, particularly your logbook and a flashdrive for storing electronic data as appropriate. You are to follow the general specificationsfor team roles within the lab. Although there are specific, individual expectations for eachrole, you are each responsible overall to ensure that the objectives and requirements of thelaboratory exercise are met, and that all rules and procedures are followed at all times,especially any that are related to safety in the lab. When finished, all equipment is to bereturned to the proper location, in proper working order.
4.2.11 Sampling, Test Specimens
Before conducting any other testing with the ultrasonic transducer, it should be calibratedby the same method used in previous labs�especially last week’s lab� and adjusted for thenewer elements in this week’s exercise. Following the calibration, the friction angle for theapparatus is to be determined according to the basic procedure outlined in the lab videos.Then, each member of the lab group should conduct his/her own block test and associateddata collection. Each member of the group should test the block’s motion at a di↵erentinclination of the apparatus (one unique value per person), and with several values of thehanging mass (these may be the same for all persons). If time allows, it is a good idea torepeat the friction angle determination to see if anything changes during testing. For thisexercise, some of the data will be recorded in the logbooks, while the dynamic data will berecorded digitally through the LabVIEW interface to a number of tab-delimited, ASCII datafiles. Note that the mass of the block must also be measured at some point, as well as anyother system parameters that may be needed for analysis in Studio.
4.2.12 Procedure - Lab Portion
Record all observations and notes about your lab experiment inyour logbook.
The instructional videos for this exercise cover the specific procedures to follow as you setup the apparatus to make measurements, and for actually collecting data with the variousdevices and software interfaces. More generally, you should always observe the followinggeneral procedures as you conduct any of the exercises in this laboratory.
1. Come prepared to lab, having watched the videos in detail, then completing the asso-ciated lab quiz and preparing your logbook before you arrive to class.
2. Follow the basic outline of elements to include in your logbook related to headers,footer, and signatures.
3. As you conduct the exercise, please pay attention to the following safety concerns:
• Watch for tripping hazards, due to cables and moving elements.
176

• Watch for pinch points, during assembling and disassembly.
• Be careful of shock hazards while connecting and operating electrical components
4. Every week, for every exercise, your logbook will minimally contain background notesand information that you collect before the lab, at least one schematic of the apparatus,various standard tables for recording the organization of your roles and equipmentused, the actual data collected and/or notes related to the data collected (if doneelectronically for instance), and any other information relevant to the reporting andanalysis of the data and understanding of the exercise itself.
5. All students should create and complete a table indicating the sta�ng plan for theweek (that is, the roles assumed by each group member), as shown in Table 1.2.
6. All students should create and complete a table listing all equipment used for the exer-cise, the location (from where was it obtained: top drawer, bottom drawer, instructor?)and all identifying information that is readily available. If the manufacturer and se-rial number are available, then record both (this would be an ideal scenario). If not,record whatever you can about the component. In some, cases, there will be no specificidentifying information whatsoever either because of the simplicity of the component,or because of its origin. In these cases, just identify the component as best you can,perhaps as “Manufactured by RITME.” The point here is to give as much informationas possible in case someone was to try to reproduce or verify what you did. Refer toTable 1.3.
7. For the Lab Manager only: create a key sign-out/sign-in table for obtaining thekey to the equipment drawers, as shown in Table 1.4.
8. All students should create a table or series of tables as appropriate to collect his/herown data for the exercise, as well as any specific notes related to the data collectionactivities. In those cases where data collection is done electronically, there may not beany data tables required.
9. Many of the laboratory exercises will require the use of a specific software interfacefor measurements and/or control. In all cases, these will be made available on themyCourses site unless stated otherwise.
10. The Scribe (or a designated alternative) should take a photo of each group memberperforming some aspect of the laboratory exercise for inclusion in the lab reportthat will be generated during the studio session. Refer to the example lab report formore details.
11. Record all relevant data and observations in your logbook, even those that may nothave been explicitly requested or indicated by the textbook or videos. If in doubtabout any measurements, it is better to make the measurement rather than not.
177

12. When you are finished with all lab activities, make sure that all equipment has beenreturned to the proper place. Log out of the computer, and straighten up everythingon the lab bench as you found it. Put the lab stools back under the bench and out ofthe way.
13. Prepare for the upcoming studio session for the week by carefully read and understandSection 4.3 of the textbook, and complete the Studio pre-work prior to your arrival atStudio.
178

4.3 Studio
This week in Studio, you will use the calibration techniques you learned in Week 1, along withthe spreadsheet created in Week 3 to investigate Newton’s 2nd and 3rd Laws, by analyzing atwo block system in 2 dimensional constrained motion. The equations for calculating forcesrely heavily on the FBD’s and theory discussed in Section 4.1 of the text. Before beginningthe Studio procedures, please review Section 4.3.1 Calculation and Interpretation of Results,which will provide a summary of equations that you will need to complete the Studio. Alsoreview Section 4.2.9 Measurement Uncertainty, which will describe the process for analyzingthe experimental errors.
Record all observations and notes about your studio procedures inyour logbook.
4.3.1 Calculation and Interpretation of Results
This week in Studio, we will calculate friction variables for two masses in constrained twodimensional motion. The equations provided below are summarized for your conveniencefrom the derivations in Section 4.1 and previous chapters. Please note that in many cases,these equations apply only to the system of bodies being analyzed in lab this week, andshould be derived from first principals for all other cases.
ps(t) = c0
+ c1
V (t) Calibration Curve for Elevation (4.83)
[m] = [m] +[m]
[v][v] Unit validation
px(t) = �ps(t) cos ✓ Horizontal Component of Position (4.84)
pz(t) = +ps(t) sin ✓ Vertical Component of Position (4.85)
�t = t2
� t1
Time between samples (4.86)
[s]
[Sample]=
1
[Sample/s]Unit validation
2�t = (t+�t)� (t��t) Time between two samples (4.87)
Vs(t) ⇡ps(t+�t)� ps(t��t)
2�tVelocity by Central Di↵erence (4.88)
[m/s] =[m]� [m]
[s]Unit validation
as(t) ⇡Vs(t+�t)� Vs(t��t)
2�tAcceleration by Central Di↵erence (4.89)
[m/s2] =[m/s]� [m/s]
[s]Unit validation
179

asavg =1
Na
row=NaX
row=1
as(t) Mean Tangential Acceleration (4.90)
µd = tan ✓ +as,avgg cos ✓
+T
m1
g cos ✓Dyn. Coef. of Friction for Sys. of Bodies (4.91)
[�] = [�] +[m/s2]
[m/s2]+
[N ]
[kgm/s2]Unit validation
f = µdm1
g cos ✓ Friction Force from Experimental µd (4.92)
[N ] = [�][kg][m/s2][�] Unit validation
f = m1
(as,avg + g sin ✓) + T Friction Force from Experimental as,avg[N ] = [kg]([m/s2] + [m/s2][�]) Unit validation
T = m2
[as,avg + g] Tension in the Cable
[N ] = [kg]([m/s2] + [m/s2]) Unit validation
4.3.2 Procedure - Studio Portion
Studio Pre-work
Prior to arriving at Studio, each student should have acquired the necessary data in lab,recorded data in your notebook and stored data on a thumb drive. You should also have acorresponding schematic that clearly identifies where each measurement was made in sym-bolic notation. Specifically, you should have the following: angle of incipient motion, ✓s, andits uncertainty, angle of each incline trial, ✓, and its uncertainty, mass of the blocks, m
1
andm
2
, values for the distance from the bottom of the ramp to the top of the ruler, L, a datatable with three columns, including block position, pB, from the top of the ruler to the block,nominal mean voltage readings, and standard error in the mean voltage. You will also needthe instrument least count (ILC) for the ruler.
In addition, each you will complete several steps of the Studio exercise. This will allowmore quality time with the instructor to discuss the physical meaning of the analysis results.You will upload your studio pre-work to your individual drop-box for the correspondingweek. You will receive a quiz grade based on the completeness of your submission.
Please complete at least steps 1-8 and upload your pre-work spreadsheet toyour individual drop-box before coming to coming to Studio. You can work on theremaining portions of the exercise during Studio. All steps with the exception of the reportare due within 24 hrs after leaving Studio.
Videos
There are videos available to help with some of the excel techniques that may be new to you.We have highlighted steps where videos might be helpful. However, you can also completethe steps simply by following the written instructions. For those procedures that do not
180

have videos, you should rely on previously developed skills. You may want to review videosfrom previous weeks if you feel that you need a refresher on some of the techniques.
Steps to Complete the Analysis
1. LOGBOOK: Before you begin, enter a Studio Week 4 header on a new page in yourlogbook. Use Figure 1.10 as a template. After completing the analysis, you will printout your graphs, answer questions and make observations related to your analysis. Itis important to make it clear that the work entered today is from Studio Week 4.
2. LOGIN: Login to your PC with your RIT account information. Insert your USB driveinto the USB port on your computer.
3. CREATE A NEW FOLDER AND FILE: On your USB drive, create a working foldercalled Week 4. Store all of your Lab and Studio files for today’s session in this folder.Open up your week 3 studio spreadsheet from last week and save a copy to yourStudio Week 4 folder with the filename of the format Lastname_Firstname_Week4_Studio.xlsx. Rename the Calibration worksheet tab to WeekCalibration. Renamethe Friction worksheet tab to Week4FrictionPulley. We will make edits to theseworksheets in subsequent steps.
4. CALIBRATION COEFFICIENTS: Update the tables in the Week4Calibration tabusing your new calibration data from this week’s lab. The trend-line will need tobe recalculated, so delete the old trend-line and insert a new one. Record the newcalibration equation for block position in your log book and replace the old calibrationcoe�cients in the appropriate cells in your Week4Calibration worksheet. Note alsothat all members of your group should have the same calibration coe�cients.
5. CREATE THE INCLINED RAMP DATA TABLE: Here you will update the InclinedRamp Data table shown in Figure 4.5 which should already be located on your tabWeek4FrictionPulley. Delete the inclined ramp data from week 3. During Lab, youcreated a new tab separated value (TXT) file containing the time readings in the firstcolumn, and the transducer voltage readings in the second column. Open this TXT fileby double-clicking on the file name. Copy the TXT data to the Inclined Ramp DataTable. Make sure the data cells remain blue to indicate that these data are constants,rather than equations. Close the TXT file.
6. CREATE THE HEADER, CONSTANTS, CONVERSION FACTORS and CALIBRA-TION COEFFICIENTS TABLES: The tables required for this week’s analysis will besimilar to those used last week. Therefore, to save some typing and calculating, simplyedit your table templates so they look like the tables shown in Figure 4.6. Note that arow is added to convert the angle of the ramp to radians units. This will make enteringequations below that involve trigonometry functions less cumbersome. Also, note thatthe ”Critical Angle” associated with calculation of the static coe�cient of friction is
181

Figure 4.5: Inclined ramp data measured in lab
eliminated this week. If you have already linked the calibration data to your analysisworksheet by entering a reference equation in the cell, the slope and intercept fromyour calibration curve should automatically update. If you have not done this, pleasemake the necessary corrections. In addition, you should have an equation in the cellfor sample time, so that the value is automatically updated.
Test: Make sure that your sample time is referencing the new lab data.
7. CREATE THE PROCESSED DATA TABLE: Your processed data table shown inFigure 4.7 should automatically update.
Test: You will most likely have a di↵erent number of data points compared to lastweek. Check the cells in your processed data table to make sure that the calibration,position component, velocity and acceleration equations are valid. Make correctionsas needed.
Test: Plot the instantaneous acceleration versus time. Look for and delete obviousoutliers if needed. To do this, hover over the marker in the acceleration plot, the datapoint coordinate should appear telling you which time step contains the outlier, returnto the table and delete the acceleration value at that time step.
8. PLOT POSITION COMPONENTS VERSUS TIME: The position plot should auto-matically update. If needed, make adjustments to the axis range or data selected. Anexample of what your plot should look like is shown in Figure 4.8.
Test: Is position changing in the correct direction with the correct sign? Does the
182

Figure 4.6: Header, Table of Constants, Conversion Factors and Calibration Coe�cients.
Figure 4.7: Template for the Processed Data Table
183

initial position correspond to the distance measured from the bottom to the top of theramp? Is the final position occurring at s=0? Why or why not? Make corrections asneeded.
Figure 4.8: Example plot of block position along the ramp
9. RESULTS - ANALYZE NEWTON’S 2ND AND 3RD LAWS: Enter and edit the equa-tions in the results table shown in Figure 4.9. Notice, that for convenience the necessaryadditions and changes are highlighted in red. Also, the equations necessary for calcu-lating the various results are shown in the figure. Note, student should ensure they areable to derive these from the force balances of the problem.
Test: Compare the friction force applied to the block calculated two ways. Do theyagree within a reasonable amount and can you justify the di↵erences? Make correctionsif needed.
Test: Compare the sum of the forces on block m1
, in the direction along the incline,to the product of mass, m
1
and acceleration along the same direction. Does the resultmake physical sense? Make corrections if needed.
Test: Check the signs of your forces and acceleration with the direction defined aspositive ”s” on the FBD. Are the signs consistent? Do you have the correct sign foracceleration?
10. CALCULATE THE UNCERTAINTY DUE TO MEASUREMENT PRECISION: Sim-ilar to last week, we have compound error in the position of the block due to the uncer-tainty in L and the uncertainty in pB. Also, the angle measurement has an uncertaintythat will create an uncertainty in the trigonometric function calculations. Finally, the
184

Figure 4.9: Template for recording results
masses have a small uncertainty from the balance’s ILC. If needed, update the valuesin the blue shaded cells in the uncertainties table shown in Figure 4.10. Check to seeif the equations for the remaining cells are complete and are updating properly.
Test: If you tested these equations last week, you do not need to test them again.However, you may want to compare uncertainties between week 3 and week 4 as a selfconsistency check.
Figure 4.10: Template for recording uncertainties due to measurement precision
11. DETERMINE THE UNCERTAINTY IN INSTANTANEOUS VELOCITY AND AC-CELERATION: The Instantaneous Uncertainties table shown in Figure 4.11 shouldautomatically update.
Test: Check to see that the equations entered are referencing the values you intended.
Figure 4.11: Template for the table to calculate the e↵ect of numerical error on uncertaintyin calculated velocity and acceleration.
185

12. DETERMINE THE UNCERTAINTY IN THE CALCULATED RESULTS: As we didlast week, we will add a column to the uncertainty analysis that is called relativeuncertainty. This along with the table for uncertainties of calculated results is shownin Figure 4.12. The relative uncertainties are simply the ratio of a variable’s uncertaintyto its magnitude. For example, the relative uncertainty of ✏m
1
is ✏m1
/m1
. Thus, you willtype “=B33/B10” in cell D33. When examining these relative uncertainties, it shouldbecome clear that many of the variables in the formulas used to calculate Tension,dynamic coe�cient of friction, Friction from µd, Friction from as,avg. Using the sameapproach as shown in Studio last week, derive formulas for the uncertainties of thesecalculated results. The instructor will review these at the beginning of class.
Figure 4.12: Table template for determining uncertainties for the calculated results.
13. UPDATE YOUR ENGINEERING LOGBOOK: Please print out your graphs, resultstable and uncertainty tables and paste them in your logbook. You may also want toprint all of the tables, but this is left for the student to decide. Sign and date yourlogbook before you leave Studio.
14. SUBMIT YOUR FILES: Submit your excel spreadsheet to your individual Week 4dropbox on myCourses before leaving the Studio. If you have not completed all the
186

steps, upload what you have done. Please include in the comment, how which proce-dures you have completed. Then within 24 hours, upload your final completed versionwith the comment ”final version.” Remember to save your work to you USB drive, andtake it with you when you leave the Studio.
15. OBSERVATIONS AND ANALYSIS: Now that you have values for all the forces actingon Mass 1, the coe�cient of dynamic friction, and the tangential acceleration, it isinstructive to reconsider the tangential direction force balance equation from Section4.1 (Equation 4.44, rewritten below for reference).
m1
as,avg = µdm1
g cos ✓ �m1
g sin ✓ � T
Write down this equation in your logbook and then show that Newton’s Second Lawis satisfied for your experimental results by calculating both side of the equation tosee if they are equal. Also, comment on how the lab this week demonstrated Newton’sThird Law.
16. CONGRATULATIONS! You have just completed the Studio portion for week 4.
17. WRITE THE REPORT: Please refer to section 4.3.3 Report on details for the reportsubmission. Before leaving Studio, decide on a date and time to meet up with yourteam mates to prepare the report.
4.3.3 Report
Please use the same task distribution for writing the report that was outlined in Week 1. Re-fine your “Team Norms” to enhance your team’s ability to work e↵ectively with one another,particularly if your team has encountered some challenges in preparing and submitting thereport. Engage in an open and frank conversation about each team member’s expectationsand whether or not they are being met.
Prepare a report to include only the following components:
• TITLE PAGE: Include the title of your experiment, “System of Bodies in ConstrainedLinear Motion”, Team Number, date, authors, with the scribe first, the teammember’s role for the week, and a photograph of each person beginning to initiatetheir trial, with a label below each photo providing team member’s name.
• PAGE 1: The heading on this page should read Experimental Set-up. Create adiagram of the experimental set-up. This week we will include only the diagram andits caption. Thus, is it important that your diagram clearly communicate the set-up,including each key component and where measurements were taken. The importantinformation to communicate are the variable names and datums that relate to yourmeasurements and results. It is a good practice to add a legend that defines anyvariables or components of the schematic that are not obvious. At the bottom of the
187

figure include a figure caption, for example Figure 1. A brief figure caption. Referto the text for examples.
Note: Figure captions are required for every plot and diagram in the report, exceptfor the title page. Figure captions are placed below the figures, and are numberedsequentially beginning with Figure 1 for the first figure in the report.
• PAGE 2: The heading on this page should read Results. Include the table shown inTable 4.2 summarizing each team member’s results. Be sure to report the uncertaintiesfor each value as shown in the first line of the example table below. At the top of thetable, include a table caption, for example Table 1. A brief figure caption. Referto the text for examples.
This week we include only tables and plots with no accompanying text. Thus, it isimportant that your tables, graphs and captions clearly communicate to the readerwhat the data represents.
Note: Table captions are required for every table in the report, except for the title page.Unlike figure captions, table captions are placed above the tables, and are numberedsequentially (independent of figure caption numbering) beginning with Table 1 for thefirst table in the report.
Table 4.2: Results from the Inclined Ramp Experiment
• PAGES 3: No heading is needed on this page, since it is a continuation of the Resultssection. Include the plots for position components , ps, px and pz. The position valuesshould be consistent with the datums shown in your schematic, which should agreewith the conventions provided in the text. Include one plot for each team member,with one figure caption for each plot. Each figure caption should be located below thegraph and include the name of the test engineer responsible for that series of trials. The
188

first caption in the Results section should be for example Figure 2. Block PositionDuring Slide by Charlie Brown.
Strive for uniformity among the graphs, including axis values and plotting styles. Thiswill enable the reader to easily compare the results between di↵erent team members.
• The final report should be collated into one document with page numbers and a con-sistent formatting style for sections, subsections and captions. Before uploading thefile, you must convert it to a pdf. Non-pdf version files may not appear the same indi↵erent viewers. Be sure to check the pdf file to make sure it appears as you intend.
189

4.4 Recitation
Recitation this week will focus on problem solving. Please bring your logbooks to class, andbe ready to ask questions about the homework problems. You are encouraged to attempt asmany homework problems as you can from Chapters 1 through 4. Your first exam is comingup next week, and it’s essential that you be completely comfortable with all of the materialcovered to-date in class.
190

4.5 Homework Problems
Complete all assigned homework problems in your logbook.
4.5.1 Consider the schematic in Figure 4.1. If a mass, m3
was suspended from m2
by a cable,draw a FBD of m
1
, m2
, m3
and the pulley, P .
4.5.2 Consider the schematic in Figure 4.1. If a mass, m3
was suspended from m2
by acable, draw a FBD of m
1
, m2
, m3
and the pulley, P , with each force resolved alongthe normal and tangential directions, as defined in Figure 4.2.
4.5.3 A 3 kg block is sliding down an inclined ramp. The ramp makes an angle of 32 degreescounter clockwise from the horizontal. What is the magnitude of the gravitationalforce on the block? What are the x and z components of the the gravitational force?(Take x as positive to the left and z as positive to up).
4.5.4 A 10 kg block is sliding down an inclined ramp. The ramp makes an angle of 50 degreescounter clockwise from the horizontal. What is the magnitude of the gravitationalforce on the block? What are the components of the gravitational force along the axesnormal and tangential to the inclined ramp? Draw the force vector diagrams, labelingall your angles and forces.
4.5.5 A 8 kg block slides down an inclined ramp. The ramp makes an angle of 132 degreesclockwise from the horizontal. What is the magnitude of the gravitational force on theblock? What are the x and z components of the the gravitational force? (Take x aspositive to the left and z as positive to up). Draw the force vector diagram, labelingall your angles and forces.
4.5.6 A 25 kg block slides down an inclined ramp. The ramp makes an angle of 165 degreesclockwise from the horizontal. What is the magnitude of the gravitational force onthe block? What are the components of the gravitational force along the axes normaland tangential to the inclined ramp? Draw the force vector diagram, labeling all yourangles and forces.
4.5.7 A 132 lb college student ski’s down a black diamond trail at 10 mph. The hill is at anangle of 85 degrees counter clockwise to the horizontal. Write a vector equation forthe weight of the skier in x and z components. Write a vector equation for the velocityof the skier in x and z components. Take x as positive to the left and z as positive toup.
4.5.8 A 5 kg block slides down an inclined ramp at approximately constant velocity. Theramp angle is 23 degrees counter clockwise from the horizontal. What is the value ofthe force on the block due to friction between the block and the ramp?
191

4.5.9 A 9 kg block slides down an inclined ramp at approximately constant velocity. Theramp angle is 110 degrees clockwise from the horizontal. What is the value of the forceon the block due to friction between the block and the ramp?
4.5.10 Explain how the weight of a skier a↵ects the friction force. Plot the static frictionforce between the skier and the snow for a realistic variation in weight from child toadult. Use a static friction coe�cient of 0.1 and use ski slope of 10 degrees from thehorizontal.
4.5.11 In the week 4 Lab experiment we analyzed a multi-body system where the motion oftwo bodies are influenced by gravity, an inclined ramp, and the motion of the otherbody. Describe a real-world multi-body system that you have observed in your dailylife.
4.5.12 Consider a roofing contractor is pulling on a rope to raise a load of roof shingles asshown. The contractor is standing on a roof with a pitch of 15 degrees. Each bundleof shingles weighs 30 lbs and the platform that carries the shingles weighs 20 lbs.
(a) Draw a Free Body Diagram and Vector Diagram for the Contractor and theplatform carrying the shingles.
(b) How many packs of shingles can the contractor lift before he begins to slide downthe roof assuming the following Contractor weights and values for the coe�cientof static friction exists between the contractor and the roof?
Scenario µs Weight of Contractor(1) 0.2 [-] 160 [lbs](2) 0.2 [-] 280 [lbs](3) 0.55 [-] 160 [lbs](4) 0.55 [-] 280 [lbs]
4.5.13 Consider the system illustrated in the figure below. Assume that the coe�cient offriction between the block m
1
and the ramp is µ. Draw Free Body Diagrams for eachof the objects listed below. Demonstrate that Newton’s Third Law is satisfied.
192

Object Descriptionm
1
FBD of Mass 1m
2
FBD of Mass 2S FBD of SpringP1 FBD of PulleyR FBD of the Ramp StructureE FBD of the Earth
4.5.14 Describe the di↵erence between a Schematic Diagram, a Free Body Diagram, and aVector Diagram.
4.5.15 Draw a representative Schematic Diagram, Free Body Diagram, and Vector Diagramof a snow boarder traveling straight down a steep “Black Diamond” slope.
4.5.16 Describe in your own words what the term “you can’t push on a rope” means withrespect to Newton’s Laws and the sign conventions associated with the rope and pulleysystem addressed in this week’s Lab.
4.5.17 Describe what a “kinematic constraint” is and why it is necessary for this week’s Laband Data analysis.
4.5.18 Explain why antilock breaks minimize skidding.
4.5.19 Consider the system illustrated in the figure below. Assume that the coe�cient offriction between the block m
2
and the ramp is µ. Draw Free Body Diagrams for eachof the objects listed below. Demonstrate that Newton’s Third Law is satisfied.
Object Descriptionm
1
FBD of Mass 1m
2
FBD of Mass 2P1 FBD of PulleyR FBD of the RampH FBD of the Horizontal SurfaceE FBD of the Earth
4.5.20 Describe in your own words what the term “you can’t push on a rope” means withrespect to Newton’s Laws and the sign conventions associated with the rope and pulleysystem addressed in this week’s Lab.
4.5.21 Describe what a “kinematic constraint” is and why it is necessary for this week’s Laband Data analysis.
193

4.5.22 Consider the system illustrated in the figure below. Assume that the coe�cient offriction between the block m
1
and the building is µB and that between block m1
andm
3
is µ1/3. Draw Free Body Diagrams for each of the objects listed below. Demonstrate
that Newton’s Third Law is satisfied.
Object Descriptionm
1
FBD of Mass 1m
2
FBD of Mass 2m
3
FBD of Mass 3P1 FBD of PulleyB FBD of the BuildingE FBD of the Earth
194