Embed Size (px)
Citation preview
169
CHAPTER 6
HYBRID EVOLUTIONARY ALGORITHMS
6.1 INTRODUCTION
In recent years, the performance of computers has a great influence
over the power systems in maintaining quality and reliable power supply.
Furthermore, the power system can be controlled easily and efficiently with a
higher degree of reliability. The growth in size and complexity of electric
power systems along with an increase in power demand has initiated the need
for intelligent systems that combine different techniques and methodologies.
The intelligent systems possess human like expert knowledge and adapt
themselves in changing environments. In the electric power system, as the
demand deviates from its normal value with an unpredictable small amount,
the state of the system changes. The automatic control system detects these
changes and initiates real time control actions, which will eliminate as
effectively and quickly as possible the state deviations. The active and
reactive power demands are never steady but continuously change with rising
and falling trend (Hadi Saadat 2002). Steam input to turbo- generators must
therefore be continually regulated to match the active power demand, failing
which the machine speed will vary with consequent change in frequency,
which may be highly undesirable. Furthermore, the excitation of generators
must be continually regulated to match the reactive power demand with
reactive generation, otherwise the voltages at various system buses may go
beyond the prescribed limits (Kundur2006).
170
Automatic Generation Control (AGC) is used in real-time control
to match the area generation changes to area load changes in order to meet tie-
line flows and keep the frequency at nominal value. By processing frequency
and tie-line deviations, AGC can determine the load changes of its own area
and in its neighbouring area. The function of AGC is to reallocate the
generation changes to pre-selected machines after an initial random
accommodation of the load by governor action. It is necessary to obtain much
better frequency constancy than obtained by the speed governor itself (Wood
and Wollenberg 2003). For successful operation of the power system, the load
must be fed with constant voltage and frequency. Hence, a suitable control
strategy has to be developed to accomplish this task. In practice different
control strategies are utilized for AGC like, Proportional and Integral (PI),
Proportional, Integral and Derivative (PID) and optimal control (Vinodkumar
1998). The optimal control is often impractical for the implementation, since
accurate prediction of load demand is necessary (Murthy 2009).
The PID controller is by far the most commonly used controller in
process control applications. It performs important functions like, the
elimination of steady-state off -set and anticipation of deviation and
generation of adequate corrective signals through the derivative action.
Together with combinational logic, sequential machines and simple function
blocks, these PID controllers are increasingly being used to build the
automation system for industries. Even though these PID controllers are very
common and well known, they are often not tuned properly resulting in poor
control quality. Since almost all PID controllers are implemented in software,
there is an opportunity to incorporate complex algorithms in these controllers.
Auto-tuning is one such feature, which is being extensively used in
commercially available PID controllers (Bandyopadhyay et al 2001). The
performances of the control loops are improved by auto tuning the PID gain
parameters of conventional controllers.
171
In many engineering disciplines a large spectrum of optimization
problems has grown in size and complexity. In some instances, the solution to
complex multidimensional problems by using classical optimization
techniques is sometimes difficult and/or computationally expensive. Hence,
Evolutionary Algorithms (EA) have been applied successfully to many
complex problems in the field of industrial and operational engineering. In
power systems, EA is applied to well-known applications including,
generation planning, network planning, unit commitment, economic dispatch,
load forecasting, power quality and reliability studies. However, as a
consequence of the structural changes in the electric power industry and need
for more advanced controllers, the incorporation of hybrid optimization
methods in the decision-making process has become ineviTable Moreover,
the industry restructuring introduces a wide range of new optimization tasks
characterized by their complexity and the amount of variables involved in the
optimization process. In some instances, the solution of these multidimensional
problems by classical optimization techniques is difficult or even impossible.
Hence, to deal with these types of optimization problems, a special class of
hybrid algorithms have received increased attention regarding their potential
in solving complex problems. In this research, hybridization is achieved by
combining basic PSO algorithm with fuzzy, GA and BF for optimal tuning of
PID gains. This improves the local and global search ability of PSO and
overcomes the premature convergence problem associated with large scale
and complex applications.
Shi and Eberhart (2001) proposed a hybrid system for three test
functions by using fuzzy to adjust dynamicallythe inertia weight to improve
the performance of the PSO. Simulation results illustrate the performance
improvement of PSO when tested for three benchmark functions. Buczak and
Uhrig (1996) proposed a novel hierarchical fuzzy-genetic information fusion
technique. The combined reasoning takes place by fuzzy aggregation
172
functions, capable of combining information by compensatory connectives
that better mimic the human reasoning process than union and intersection,
employed in traditional set theories. The simulation results validate the
performance of the fusion algorithm with reduced computational complexity
and generate satisfactory results. Wenping Chang (2010) presented a novel
fuzzy adaptive PSO to determine the optimal operation of the hydrothermal
power system. The experimental result shows that the proposed approach has
the higher quality solutions and strong ability in global search. Gomez
Skarmeta et al (2001) evaluated the use of combining the fuzzy clustering
techniques with GA for classification tasks and the potential of their
integration in producing better classification results. The results show that the
use of the hybrid algorithm could increase the accuracy of the system in
comparison with the conventional GA technique. Li Zang et al (2010)
proposed PSO-fuzzy group decision making support system for vehicle
performance evaluation. The performance analysis reveals that the PSO-fuzzy
is an efficient method, and it can be used to solve complex problems in the
field of power system engineering. Mahdi Banejad and Hooshmand (2001)
have presented Fuzzy PSO algorithm for optimal design of PID controller in
an AVR system and the performance was found to be better when compared
with conventional GA and PSO algorithms. Bandyopadhyay et al (2001) have
presented Fuzzy-GA approach for auto-tuning of PID controller for different
process models. The responses of first-order dead-time process model and
second-order dead-time process models were presented, and satisfactory
responses were achieved. Fang and Chen (2009) proposed an enhanced PSO
(EPSO) algorithm for optimal tuning of PID gains for a typical PID control
system. The simulation results show that the EPSO algorithm has stable
convergence characteristics and good computational stability.
Dong Hwa Kim et al (2007) proposed hybrid GA-BF approach for
global optimization problems and its performance was validated for four test
173
functions and to tune the gains of PID controller in AVR system. Simulation
results of test functions and AVR clearly indicated the efficiency of proposed
approach, and therefore, it could be used to solve different optimization
problems. ArijitBiswas et al (2007) proposed a hybrid approach involving
PSO and BF algorithm for optimizing multimodal and high dimensional
functions. The new method found to be statistically better, since the proposed
algorithm outperformed both GA and BF over few numerical benchmarks and
in optimizing PID gain parameters. Wong et al (2009) developed hybrid
evolutionary algorithm combining GA and PSO for PID controller design for
AVR system. From comparison and simulation results, it is found that the
proposed new algorithm finds a high quality solution effectively. ArijitBiswas
(2007) designed a hybrid optimization technique, which synergistically
couples the BF with the PSO. The proposed algorithm has shown to be
statistically better and can be used significantly in designing optimization
problem. Mukherjee and Ghosal (2008), Shayeghi (2007, 2008), Ghosal and
Goswami (2003), Ghosal (2004) have developed EA Based algorithms to
optimize the PID gains for adaptive control applications and thereby
increasing the performance characteristics of a controller. Sabahi et al (2008)
proposed adaptive weighted particle swarm optimization for LFC in two areas
interconnected power system. The simulation results validate the efficiency of
improved PSO algorithm in obtaining the frequency response characteristics.
From the simulation results, the efficiency of proposed controller design is
obtained and compared with the conventional PSO with. Seyed Abbas Taher
et al (2008) developed hybrid PSO (HPSO) algorithm for optimal
decentralized LFC in two area power system. Simulation results indicate that
HPSO controller guarantee the good performance under various load
conditions.
In this research, an advanced hybrid EA is proposed to increase the
searching speed, reliability and efficiency of the original PSO algorithm. The
174
proposed hybrid intelligent paradigms exhibit an ability to adapt and learn to
new applications or situations under changing environment. This technique
puts the adaptively changing terms in original constant terms, so that the
parameters of the original PSO algorithm changes with convergence rate,
which is presented by the objective function. In order to identify the changing
dynamics of the power system and to provide appropriate control actions, fast
dynamic models are needed. The model of the LFC and AVR of a single area
power system is designed using simulink in MATLAB. The objective of this
work is to design and implement hybrid EA Based PID controller to search
the optimal PID gain parameters for efficient control of voltage and
frequency. The evolutionary algorithms proposed in this research are
Enhanced Particle Swarm Optimization (EPSO), Multi objective Particle
Swarm Optimization (MOPSO) and Stochastic Particle Swarm Optimization
(SPSO), Fuzzy Particle Swarm Optimization (FPSO), Bacterial Foraging
Particle Swarm Optimization (BF-PSO) and Hybrid Genetic Algorithm
(HGA). The algorithms are designed to generate the optimum Proportional,
Integral and Derivative gains of the controller. These values are sent to
workspace and shared with the simulink model for simulation under various
loads and regulation parameters. The proposed LFC and AVR contribute to
the satisfactory operation of the power system by maintaining system voltages
and frequency for different load and regulation parameters.
This chapter is organized as follows: Section 2 describes the types
of hybrid EA; Section 3 describes the design of hybrid EA Based controllers;
Section 4 shows simulation results. Performance comparison of different
hybrid EA is given in section 5. Section 6 indicates the computational
efficiency of hybrid controllers, and summary is derived in Section 7.
175
6.2 EVOLUTIONARY ALGORITHMS
Evolutionary Algorithm (EA) is a basic search algorithm, which is
derived from the Darwin’s Theory of Evolution, proposed in 1859. According
to the Darwin’s theory, if an environment can host only a limited number of
populations then every single individual in the environment tries to attain the
best position. As a result, the individuals will begin to compete among
themselves for the given resources to attain a better position and at last, the
individuals that are best fit to the environmental conditions will survive. This
phenomenon is also known as ‘survival of the fittest’. The mechanisms used
by EAs are inspired from biological evolution to find the solution for the
given problem. It performs well in approximating a set of solution for all
types of problems because they ideally do not make any assumption about the
underlying fitness landscape. The Evolutionary process is simulated in a
computer and hence, millions of generations can be executed in a matter of
hours and can be repeated under various circumstances. Evolution is an
optimization process, where the aim is to improve the ability of individuals to
survive. Evolution via natural selection of a randomly chosen population of
individuals can be thought of as a search through the space of possible
chromosome values. In that sense, an EA is a stochastic search for an optimal
solution to a given problem. An EA utilizes a population of individuals,
where everyone represents a candidate solution to the problem.
The EA selects the best fit value from the given population, and it
is less sensitive to the scaling of algorithm parameters. EA also has good fault
tolerance, and it furthermore takes care of social and cognition behavior of the
individual particle. In Evolutionary algorithm, the self-adaption of the particle
is an important strategy which varies the EA parameters during run time in a
specific manner. This feature is inherent in modern evolution strategies and
176
provided the context of changing fitness landscapes also. With this feature,
even if the objective function changes, the EA always aims at the moving
target i.e. the present population will be reevaluated, and quite naturally it is
tested whether individuals have been adapted to the new objective function.
The EA techniques provide robust performance and global search
characteristics. The most significant advantage of using EA technique is the
gain of flexibility and adaptability to the task for which the algorithm is
designed (Fogel 2000). Hybrid EA spans a family of optimization algorithms,
each algorithm is differentiated by the way of selecting the best solution,
method of creating new solutions from existing ones, and the data structures
used to represent those solutions. The different variants of the PSO algorithm
described in this section incorporate either the capabilities of other
computation techniques like Fuzzy, GA, BF or the adaptation of PSO
parameters for a better performance. The proposed hybridization techniques
presented in this section has superior features, including easy implementation,
stable convergence characteristics and good computational efficiency.
6.2.1 Enhanced Particle Swarm Optimization (EPSO)
The EPSO is an improved version of the conventional PSO, being
inspired by the study of birds and fish flocking. In EPSO, the Constriction
Factor approach is introduced in the velocity update formula to ensure faster
convergence. In EPSO algorithm, each particle in the swarm represents a
solution to the problem and it is defined with its position and velocity. In
D-dimensional search space, the position of the ith
particle can be represented
by a D-dimensional vector, Xi= (Xi1,…,Xid, …, XiD). The velocity of the
particle vi can be represented by another D-dimensional vector Vi= (Vi1,…,
Vid, …, ViD). The best position visited by the ith
particle is denoted as
Pi= (Pi1,…,Pid,…,PiD), and Pg as the index of the particle visited the best
177
position in the swarm, then Pg becomes the best solution found so far. The
working of EPSO algorithm is explained in the following steps.
Step 1: The algorithm parameters like number of generation, population
size, inertia weight minimum, maximum (Wmin, Wmax), and maximum
iterations are initialized.
Step 2: The values of Kp, Ki and Kd are initialized randomly within the
optimal range of values for each gains.
Step 3: The Constriction Factor (K) is evaluated from the given values of
C1 and C2 by the Equation (6.1)
C4CC2
2K
2 (6.1)
where, c = C1 + C2
C1 and C2 are the cognitive and social coefficients of the particles in
the search space. The C1 and C2 values are selected so that the sum ‘c’ is
always greater than 4.
Step 4: The weight of the particle is linearly decreased with each
iteration according to the Equation (6.2).
max
minmin
maxiter
WW*iterWW (6.2)
where itermax is the maximum of iteration in evolution process, Wmax is
maximum value of inertia weight, Wmin is the minimum value of inertia

178
weight, and iter is current value of iteration and the weight ‘W’ is updated in
every iteration.
Step 5: The fitness of each particle is evaluated using the Integral of Time
multiplied by the Absolute value of Error (ITAE) fitness function as in
Equation (6.3)
0dt).t(e.tF (6.3)
Step 6: The Local Best position (Pi) and the Global Best position (Pg) of
particles are found Based on the fitness value of the particles calculated from
step 5.
Step 7: The velocity and position of the particle is updated using the
Equation (6.4) and Equation (6.5) respectively.
Vid = WKVid + C1 R (Pid – Xid) + C2r (Pgd– Xid) (6.4)
Xid=Xid+Vid (6.5)
where R and r are random numbers selected between 0 and 1.
Step 8: The steps 4 to 7 are repeated until the maximum iterations reached or
the best solution is found.
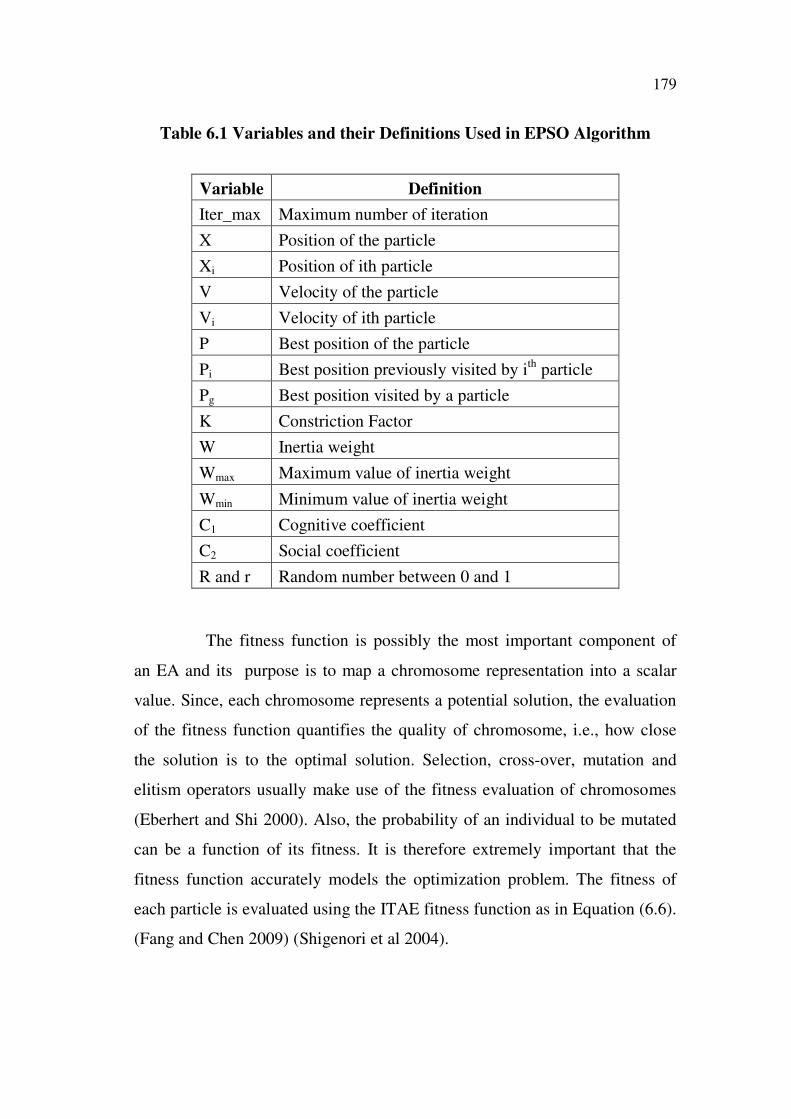
The variables used in EPSO algorithm and their definitions are
tabulated in Table 6.1.
179
Table 6.1 Variables and their Definitions Used in EPSO Algorithm
Variable Definition
Iter_max Maximum number of iteration
X Position of the particle
Xi Position of ith particle
V Velocity of the particle
Vi Velocity of ith particle
P Best position of the particle
Pi Best position previously visited by ith
particle
Pg Best position visited by a particle
K Constriction Factor
W Inertia weight
Wmax Maximum value of inertia weight
Wmin Minimum value of inertia weight
C1 Cognitive coefficient
C2 Social coefficient
R and r Random number between 0 and 1
The fitness function is possibly the most important component of
an EA and its purpose is to map a chromosome representation into a scalar
value. Since, each chromosome represents a potential solution, the evaluation
of the fitness function quantifies the quality of chromosome, i.e., how close
the solution is to the optimal solution. Selection, cross-over, mutation and
elitism operators usually make use of the fitness evaluation of chromosomes
(Eberhert and Shi 2000). Also, the probability of an individual to be mutated
can be a function of its fitness. It is therefore extremely important that the
fitness function accurately models the optimization problem. The fitness of
each particle is evaluated using the ITAE fitness function as in Equation (6.6).
(Fang and Chen 2009) (Shigenori et al 2004).
180
Start
Initialize the population and values of wmax,
wmin, C1, C2, itermax
Initialize Kp, Ki and Kd values randomly
Evaluate the Constriction Factor (K)
Update the weight of each particle
Calculate the Fitness function
Find the local and global best position of the particles
Calculate the fitness of the new population
Maximum
iterations
reached?
Output the parameters Kp, Ki and Kd
Stop
Yes
No
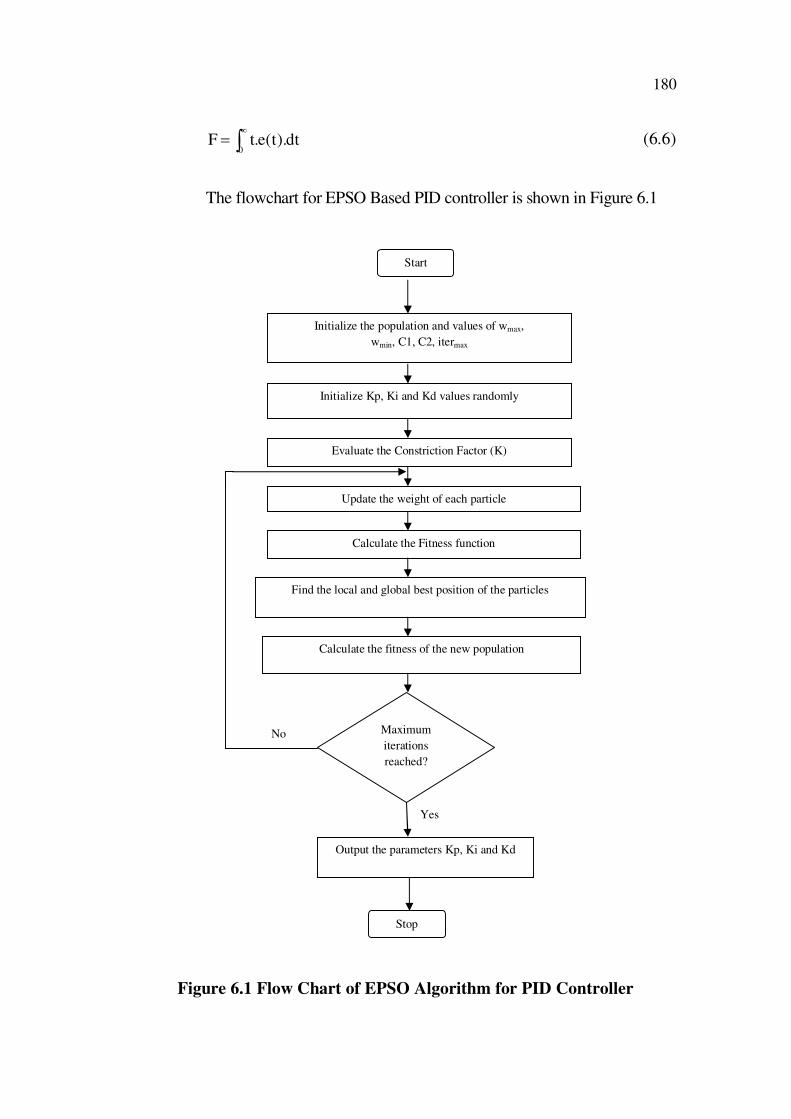
0dt).t(e.tF (6.6)
The flowchart for EPSO Based PID controller is shown in Figure 6.1
Figure 6.1 Flow Chart of EPSO Algorithm for PID Controller
181
The objective function provides a means for evaluating the
performance of the PID controller by determining the gain parameters in the
process of search, so that an optimized controller would be developed by the
best individual. The proposed EPSO algorithm provides stable and faster
convergence towards global best solution in a minimal computational time.
6.2.2 Multi Objective Particle Swarm Optimization (MOPSO)
Real world problems often have multiple conflicting objectives. In
certain problems, there is no single solution that is the best when measured on
all objectives. In this method, the acceleration Factor (K) is introduced in the
velocity update formula and the Inertia weight of the each particle is made to
decrease linearly in all iterations. By adjusting the different objectives, the
MOPSO seeks to discover possible combinations of available objectives and
then the best solutions can be found for the PID controller (Popov 2005). In
this algorithm original PSO which operates in continuous space is extended to
operate on discrete binary variables. The extended version of PSO has been
proven to be very effective for static and dynamic optimization problems. The
multi objective particle swarm optimization technique is Based on the idea of
combining several objective functions that are need to be satisfied by solution.
The variables used in MO-PSO algorithm and their definitions are tabulated
in Table 6.2.
182
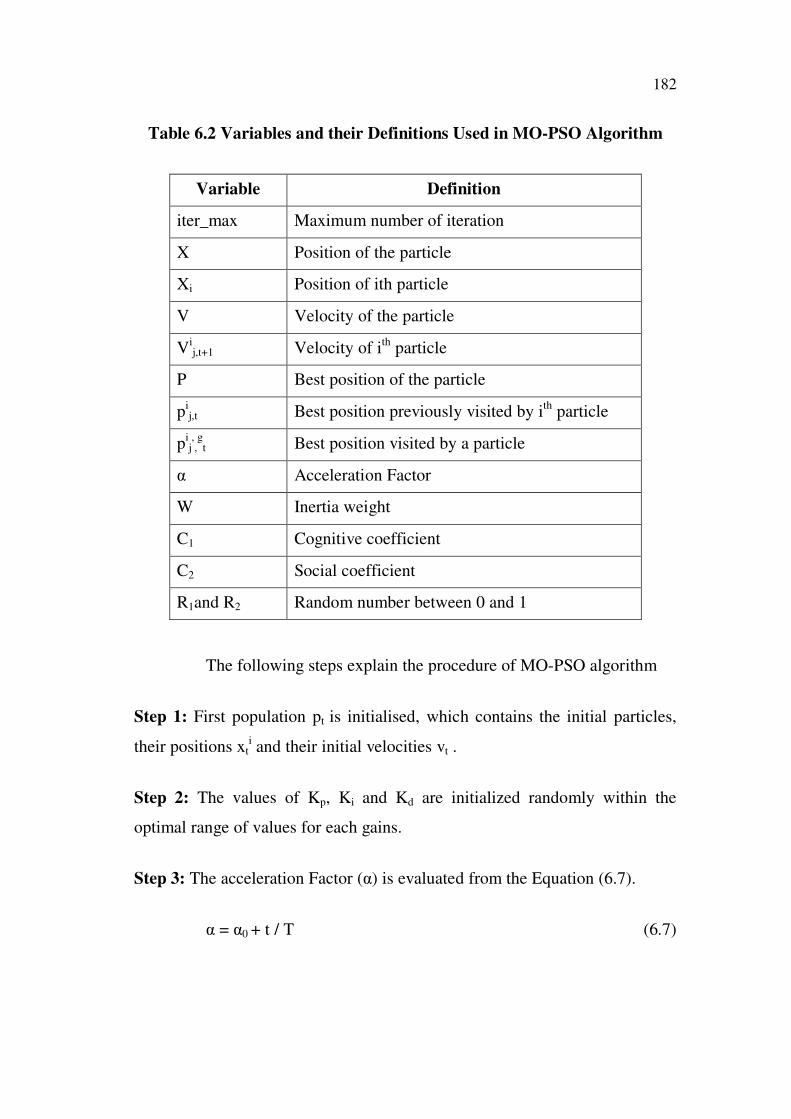
Table 6.2 Variables and their Definitions Used in MO-PSO Algorithm
Variable Definition
iter_max Maximum number of iteration
X Position of the particle
Xi Position of ith particle
V Velocity of the particle
Vij,t+1 Velocity of i
th particle
P Best position of the particle
pij,t Best position previously visited by i
th particle
pij,,gt Best position visited by a particle
Acceleration Factor
W Inertia weight
C1 Cognitive coefficient
C2 Social coefficient
R1and R2 Random number between 0 and 1
The following steps explain the procedure of MO-PSO algorithm
Step 1: First population pt is initialised, which contains the initial particles,
their positions xti and their initial velocities vt .
Step 2: The values of Kp, Ki and Kd are initialized randomly within the
optimal range of values for each gains.
Step 3: The acceleration Factor ( ) is evaluated from the Equation (6.7).
= 0 + t / T (6.7)

183
where t denotes current generation, T denotes the total number of generation
and 0 selected within the range 0.5 and 1.
Step 4: After evaluating population pt, initial archive At is generated with
non-dominated solutions in pt The weight of the particle is Linearly
Decreased with each iteration according to the Equation (6.8).
W= w0 + r*(1-w0) (6.8)
where w0 is the initial weight and r is a random number varies between 0 and 1
Step 5: The local guide for each particle is found using the function
findlb(At+1,xti) from the set of non-dominated solutions stored in the archive
At for each particle in the search space.
Step 6: Determine the velocity and position of ith
particle Vij,t and x
ij,t to
direct the swarm towards optimum solution.
Step 7: The velocity and position of the particle is updated using the
following Equation (6.9) and Equation (6.10) respectiveley,
Vij,t+1 = wV
ij,t + * (c1R1( p
ij,t – x
ij,t) + c2R2 (p
ij,,gt – x
ij,t)) (6.9)
Xij,t+1= x
ij,t + V
ij,t+1 (6.10)
The Local and Global best positions are updated after each iteration
Based on the fitness values of particles.
Step 8: The fitness value is calculated considering the objective function
using the relation in Equation (6.11).
n
1iiival )k(fw)k(E (6.11)
184
Step 9: The steps 2 to 8 are repeated until the maximum iteration reached or
the best solution is attained.
Each particle has to change its position xti towards the position of a
local guide pti.g
and its best personal position stored in pt. The particles in the
population pt will be evaluated by function chosen for the particular
application in this case, the objective function. An ideal fitness function
correlates closely with the algorithm's goal, and yet may be computed
quickly. Speed of execution is very important, as a typical evolutionary
algorithm must be iterated many times in order to produce a usable result for a
non-trivial problem The fitness functions for over shoot/undershoot
minimisation and Settling time minimisation are given in Equations (6.12)
and (6.13) respectively.
F1(KiKpKd) =max (1/(1+OU)) (6.12)
where OU overshoot in single area
F2(KiKpKd) =max (1/(1+TN)) (6.13)
where TN = Tsettling time / Ttotal
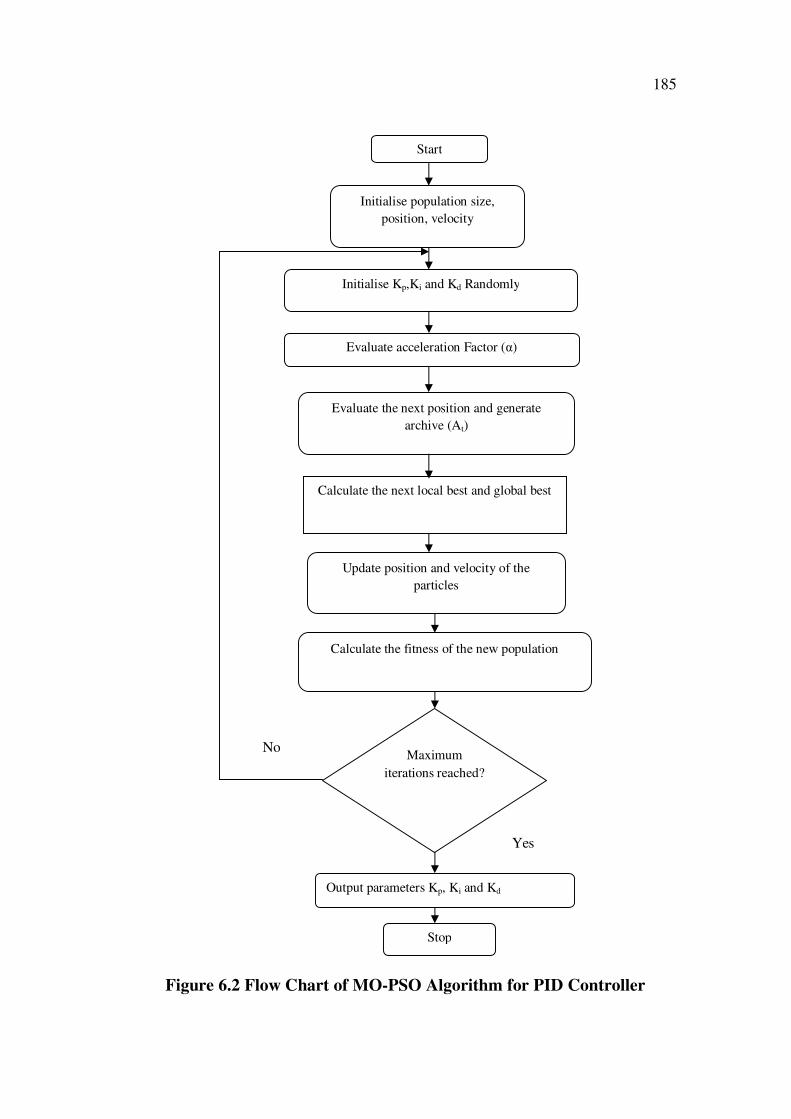
Thus the fitness of each particle is evaluated and the particle with
minimum fitness for overshoot and settling time is selected as the best. The
flowchart for MO-PSO Based PID controller is shown in Figure 6.2.
The original PSO sometimes takes time to get into the current
effective area in the solution space. On the contrary, MOPSO moves the
evaluated agents to the current effective area directly using the selection
method and search is concentrated especially in the current effective area. In
this algorithm the optimal gains of PID controller are searched in feasible
region of response until the determined objective function is minimized.
185
Initialise population size,
position, velocity
Calculate the next local best and global best
Update position and velocity of the
particles
Evaluate acceleration Factor ( )
Evaluate the next position and generate
archive (At)
Start
Initialise Kp,Ki and Kd Randomly
Calculate the fitness of the new population
Maximum
iterations reached?
Output parameters Kp, Ki and Kd
Stop
No
Yes
Figure 6.2 Flow Chart of MO-PSO Algorithm for PID Controller

186
6.2.3 Stochastic Particle Swarm Optimization (SPSO)
In this method, the ‘Time Varying Acceleration Co-efficient’s
(TVACs) are introduced for Cognitive and Social co-efficient. The
implementation of these TVAC’s reduces the cognitive component (C1)
meanwhile increasing the social component (C2) acceleration coefficient with
time. Here, the inertia weight and acceleration coefficients are neither set to a
constant value nor set as a linearly decreasing time varying function. Instead,
these values are updated non-linearly in each generation and so better
convergence rate is obtained towards the optimal PID gains in minimal
iterations (Janga Reddy and Nagesh Kumar 2007). The Time Varying
Acceleration Co-efficient (TVAC) i.e. Cognitive and Social Co-efficients are
initialized as in Equations (6.14) and (6.15).
f1f1i11C
itermax_
iteritermax_*CCC (6.14)
f2f2i22C
itermax_
iteritermax_*CCC (6.15)
Where, Initial Cognitive factor C1i = 2.05, Initial Social factor C2i = 2.05,
Final Cognitive factor C1f = 3 and Final Social factor C2f = 3. Now the
Weight of the each particle is updated non-linearly by using the formula in
Equation (6.16).
minminmaxW
itermax_
iteritermax_*)WW(W (6.16)
where Wmax is the maximum inertia weight and Wmin is the minimum value
of inertia weight, max_iter is maximum number of iteration and iter is the
current iteration value. In this research, the fitness function or cost function is
a minimization function i.e. each particle in the search space should approach
the optimal solution available in that space. Let S be the number of particles

187
in the swarm, each particle will be in its own position i.e. xi Rn in the
N-dimensional search-space and its velocity Vi Rn. Let Pi be the current best
position of ith
particle and let ‘g’ be the Global best known position in the
entire swarm, the steps involved in SPSO algorithm are as follows
Step 1: The algorithm parameters like number of generations, number of
dimensions, Inertia weight minimum (Wmin), inertia weight maximum (Wmax),
initial and final values for Cognitive and social Co-efficient and maximum
iterations are initialized.
Step 2: The PID controller Gain values i.e. Kp,Ki,Kd are initialized randomly
within the optimal range.
Step 3: The Time Varying Acceleration Co-efficient (TVAC) i.e. Cognitive
(C1) and Social (C2) Co-efficients are initialized as in Equations (6.14) and
(6.15)
Step 4: The Weight of the each particle is updated non-linearly by using the
Equation (6.16)
Step 5: Fitness function is applied for each particle and it is evaluated in each
iteration for updating the particles towards the best solution in every step.
Step 6: Determine the local best position Pi and the Global best position Pg
among the particles, Based on the fitness function
Step 7: Now, the Velocity and Position of the Particle is updated by using the
Velocity and Position update formula i.e.,
Vid = w*Vid + c1R1( pid – xid) + c2R2 (pgd – xid) (6.17)
Xid = Xid+ Vid (6.18)
188
Thus, Local and Global best positions are updated for each iteration
using the fitness function and the solution move towards optimal value in
every step.
Step 8: The steps 4 to 7 is repeated until the best solution is obtained or
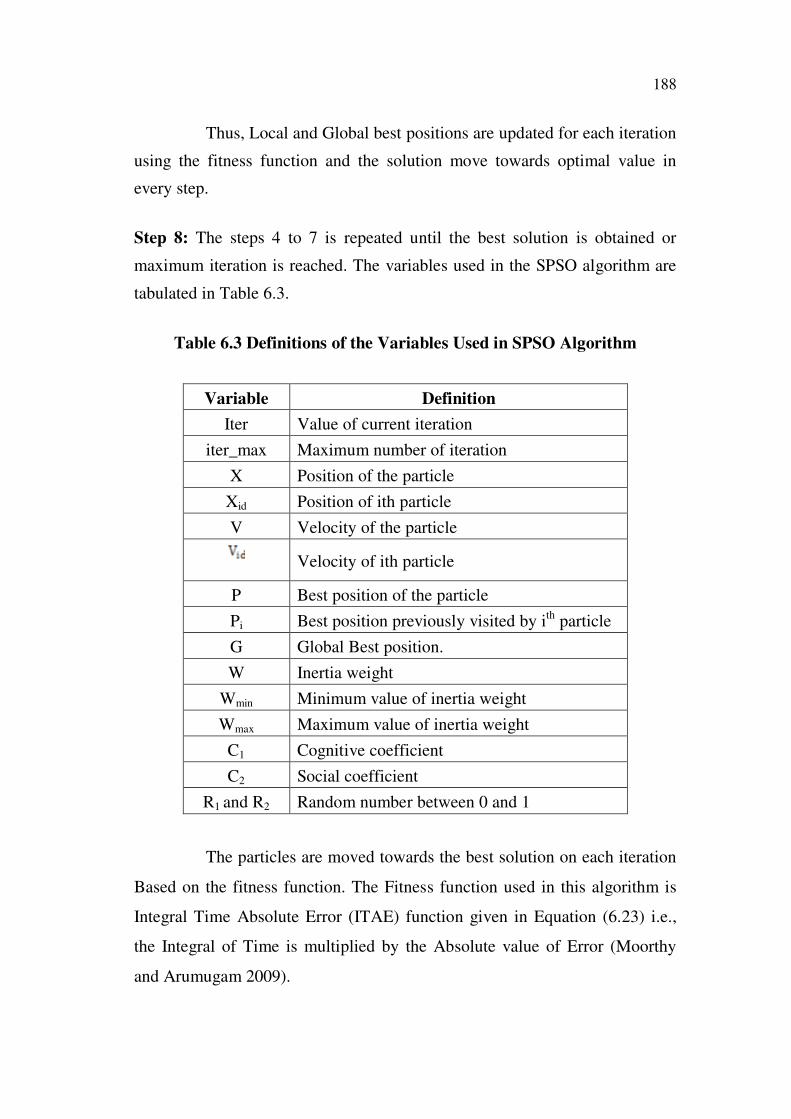
maximum iteration is reached. The variables used in the SPSO algorithm are
tabulated in Table 6.3.
Table 6.3 Definitions of the Variables Used in SPSO Algorithm
Variable Definition
Iter Value of current iteration
iter_max Maximum number of iteration
X Position of the particle
Xid Position of ith particle
V Velocity of the particle
Velocity of ith particle
P Best position of the particle
Pi Best position previously visited by ith
particle
G Global Best position.
W Inertia weight
Wmin Minimum value of inertia weight
Wmax Maximum value of inertia weight
C1 Cognitive coefficient
C2 Social coefficient
R1 and R2 Random number between 0 and 1
The particles are moved towards the best solution on each iteration
Based on the fitness function. The Fitness function used in this algorithm is
Integral Time Absolute Error (ITAE) function given in Equation (6.23) i.e.,
the Integral of Time is multiplied by the Absolute value of Error (Moorthy
and Arumugam 2009).
189
Start
Initialize the Algorithm parameters like No. ofGenerations, population, Inertia weight etc.
Initialize the PID Gains
Initialize the varying Acceleration Co-efficients (c1 and c2)
Display PID Gains
Evaluate the Fitness function
Update Inertia Weight
Obtained Global and
Local best?
Maximum Iterationsreached?
Stop
No
Yes
No
Yes
0dt).t(e.tF (6.19)
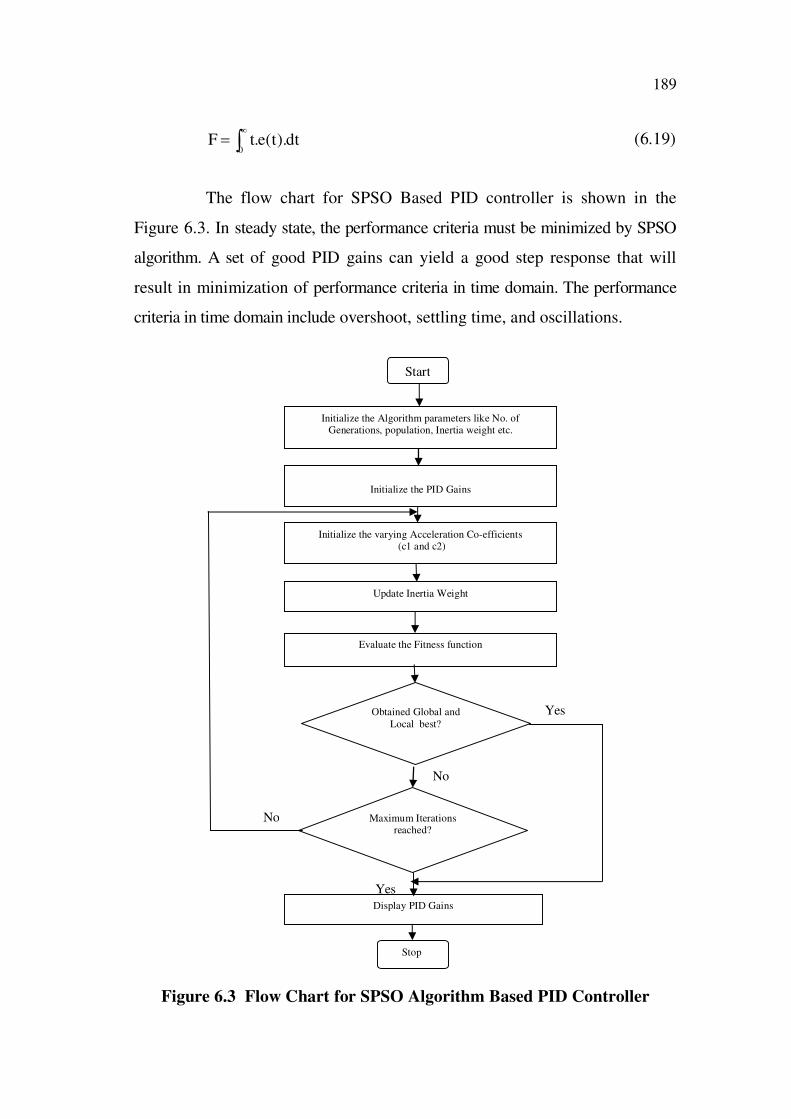
The flow chart for SPSO Based PID controller is shown in the
Figure 6.3. In steady state, the performance criteria must be minimized by SPSO
algorithm. A set of good PID gains can yield a good step response that will
result in minimization of performance criteria in time domain. The performance
criteria in time domain include overshoot, settling time, and oscillations.
Figure 6.3 Flow Chart for SPSO Algorithm Based PID Controller
190
6.2.4 Fuzzy Particle Swarm Optimization (FPSO)
Fuzzy-Particle Swarm Optimization is an Hybrid Evolutionary
Computation Based search algorithm which can be used to solve optimization
problems. In this technique, Fuzzy logic is used to dynamically adapt the
inertia weight of the PSO. By linearly decreasing the inertia weight from
relatively large value to a small value through the course of a PSO run, PSO
tends to have more global search ability at the beginning of the run while
local search ability at the end of the run (Shi and Eberhert 2001). As a result,
a deterministic approach towards the optimal gain value of the PID Controller
is obtained. In the proposed FPSO method, the inertia weight factor, W is
varied according to the mathematical model representing the application.
Modify the member velocity of each individual according to the inertia
weight factor w which is obtained from fuzzy logic. In order to fuzzify the
variation of factor W, two fuzzy inputs are used. The first input is called
Current Best Performance Evaluation (CBFE) and describes the point that has
the best performance. In this technique, the Normalized form of Current Best
Performance Evaluation (NCPBE) is calculated using the Equation (6.20).
CBPEmin is the best acceptable performance of FPSO and CBPEmax is the
worst acceptable performance of FPSO. The second fuzzy input is the current
value of the inertia weight factor (Shi and Eberhert 2000).
minmax
min
CBPECBPE
CBPECBPENCBPE (6.20)
To design a fuzzy system to dynamically adapt the inertia weight,
normally the inputs to the system are variables that measure the performance
of the PSO and the output is the inertia weight or the variation of the inertia
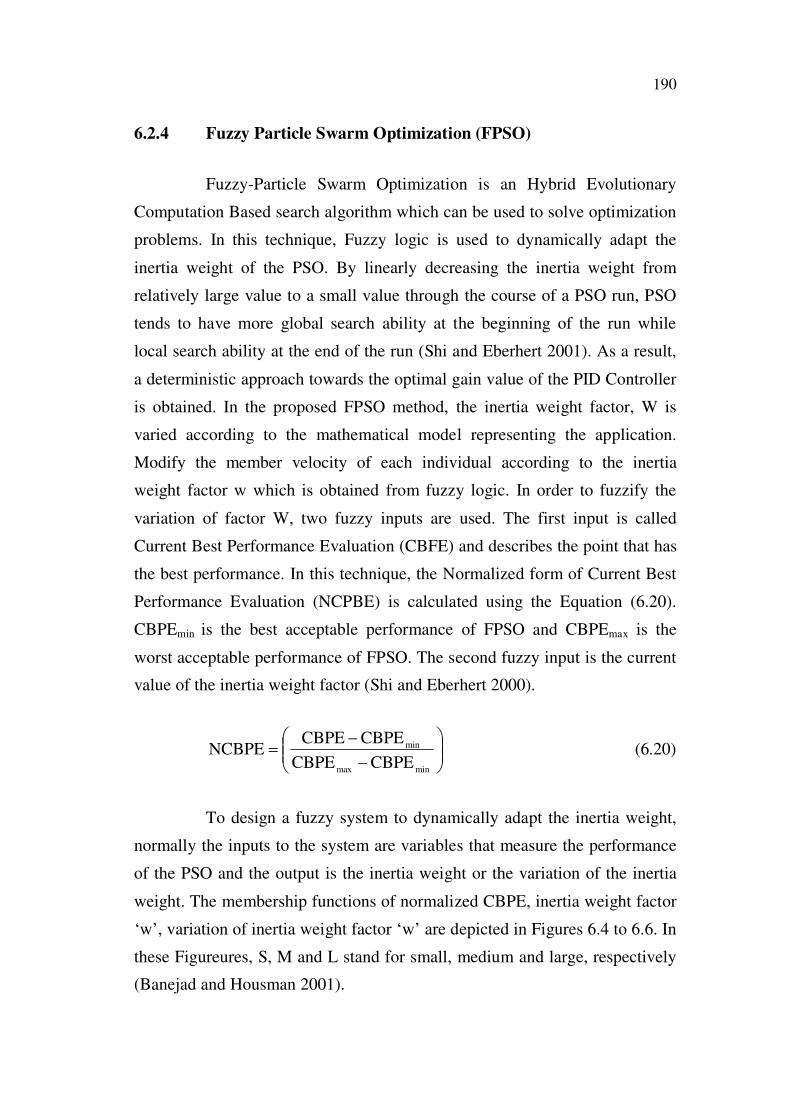
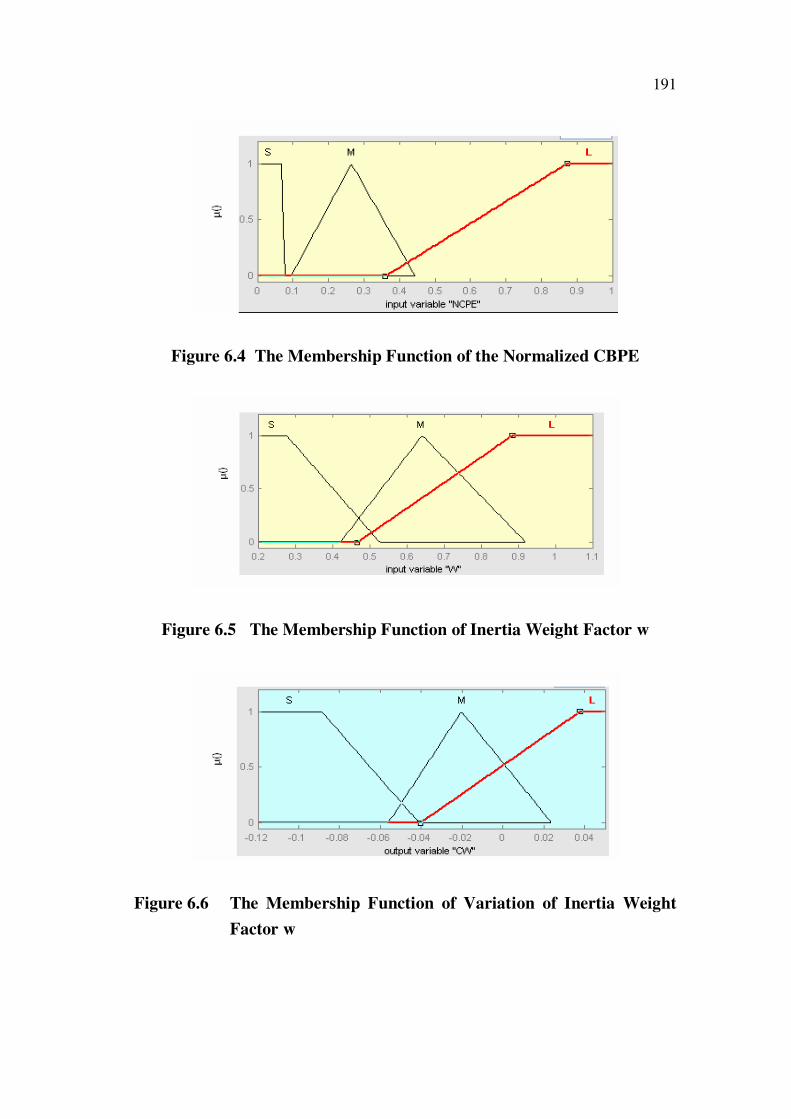
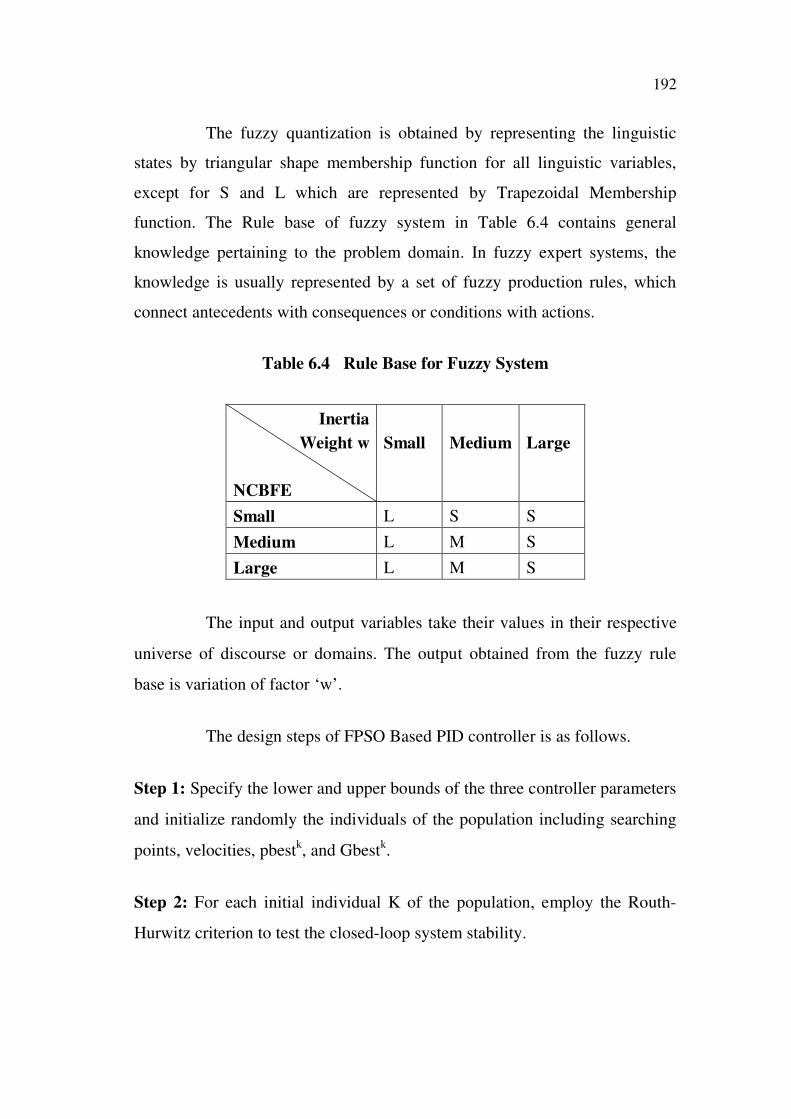
weight. The membership functions of normalized CBPE, inertia weight factor
‘w’, variation of inertia weight factor ‘w’ are depicted in Figures 6.4 to 6.6. In
these Figureures, S, M and L stand for small, medium and large, respectively
(Banejad and Housman 2001).
191
Figure 6.4 The Membership Function of the Normalized CBPE
Figure 6.5 The Membership Function of Inertia Weight Factor w
Figure 6.6 The Membership Function of Variation of Inertia Weight
Factor w
192
The fuzzy quantization is obtained by representing the linguistic
states by triangular shape membership function for all linguistic variables,
except for S and L which are represented by Trapezoidal Membership
function. The Rule base of fuzzy system in Table 6.4 contains general
knowledge pertaining to the problem domain. In fuzzy expert systems, the
knowledge is usually represented by a set of fuzzy production rules, which
connect antecedents with consequences or conditions with actions.
Table 6.4 Rule Base for Fuzzy System
Inertia
Weight w
NCBFE
Small Medium Large
Small L S S
Medium L M S
Large L M S
The input and output variables take their values in their respective
universe of discourse or domains. The output obtained from the fuzzy rule
base is variation of factor ‘w’.
The design steps of FPSO Based PID controller is as follows.
Step 1: Specify the lower and upper bounds of the three controller parameters
and initialize randomly the individuals of the population including searching
points, velocities, pbestk, and Gbest
k.
Step 2: For each initial individual K of the population, employ the Routh-
Hurwitz criterion to test the closed-loop system stability.
193
Step 3: Generate position of the particle randomly.
Step 4: Calculate the fitness function value of each individual in the
population using the evaluation function ‘f’ given by Equation (6.24).
Step 5: Compare each individual’s evaluation value with its pbestk. The best
fitness value denoted as Gbestk
Step 6: Update the velocity of particle in each individual ‘k’ with the inertia
weight factor ‘W’ obtained from fuzzy logic.
)xgbest(*()2rand*1Cxpbest(*()1rand*1CwVVk
g,jg,i
k
g,jg,i
k
j
1k
j(6.21)
1k
j
k
g,j
1k
g,j vxx (6.23)
Step 7: Update local best Pi and global best Pg by using the fitness function in
Equation (6.24).
Step 8: If the number of iterations reaches the maximum, then go to Step 9
Otherwise, go to Step 2.
Step 9: The individual that generates the latest is an optimal controller
parameter.
The variables used in the FPSO algorithm is tabulated in Table 6.4
194
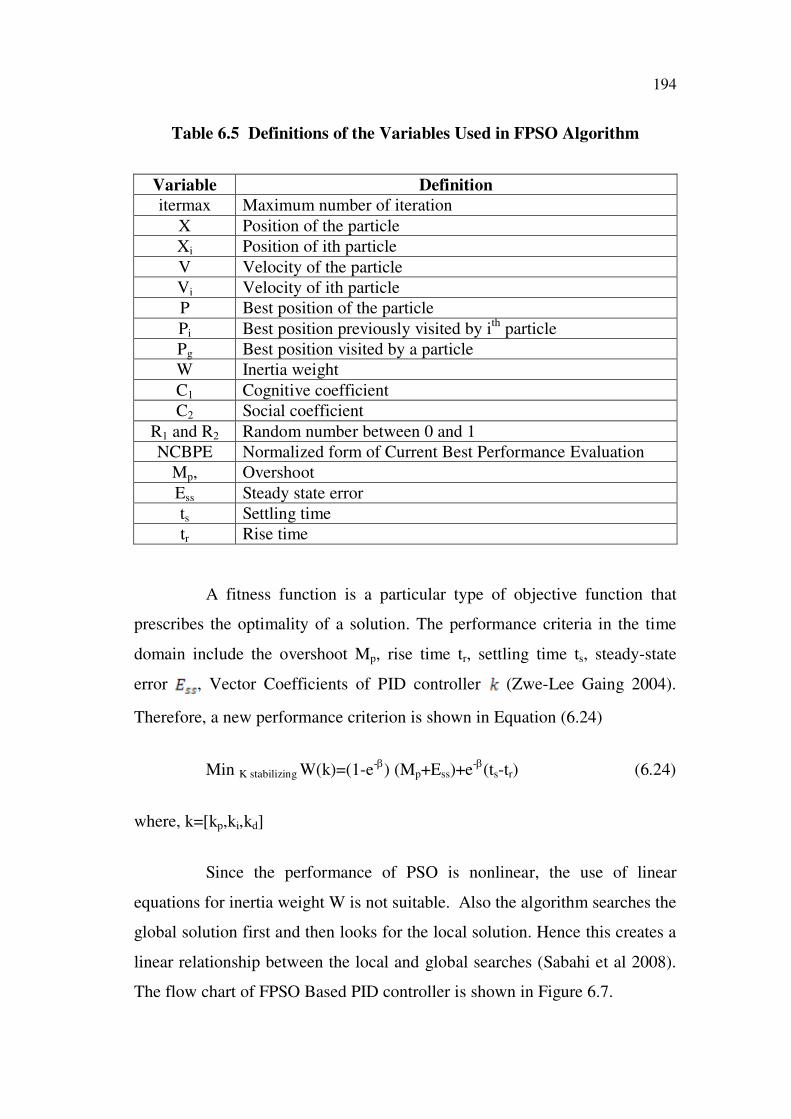
Table 6.5 Definitions of the Variables Used in FPSO Algorithm
Variable Definition
itermax Maximum number of iteration
X Position of the particle
Xi Position of ith particle
V Velocity of the particle
Vi Velocity of ith particle
P Best position of the particle
Pi Best position previously visited by ith
particle
Pg Best position visited by a particle
W Inertia weight
C1 Cognitive coefficient
C2 Social coefficient
R1 and R2 Random number between 0 and 1
NCBPE Normalized form of Current Best Performance Evaluation
Mp, Overshoot
Ess Steady state error
ts Settling time
tr Rise time
A fitness function is a particular type of objective function that
prescribes the optimality of a solution. The performance criteria in the time
domain include the overshoot Mp, rise time tr, settling time ts, steady-state
error , Vector Coefficients of PID controller (Zwe-Lee Gaing 2004).
Therefore, a new performance criterion is shown in Equation (6.24)
Min K stabilizing W(k)=(1-e-
) (Mp+Ess)+e-
(ts-tr) (6.24)
where, k=[kp,ki,kd]
Since the performance of PSO is nonlinear, the use of linear
equations for inertia weight W is not suitable. Also the algorithm searches the
global solution first and then looks for the local solution. Hence this creates a
linear relationship between the local and global searches (Sabahi et al 2008).
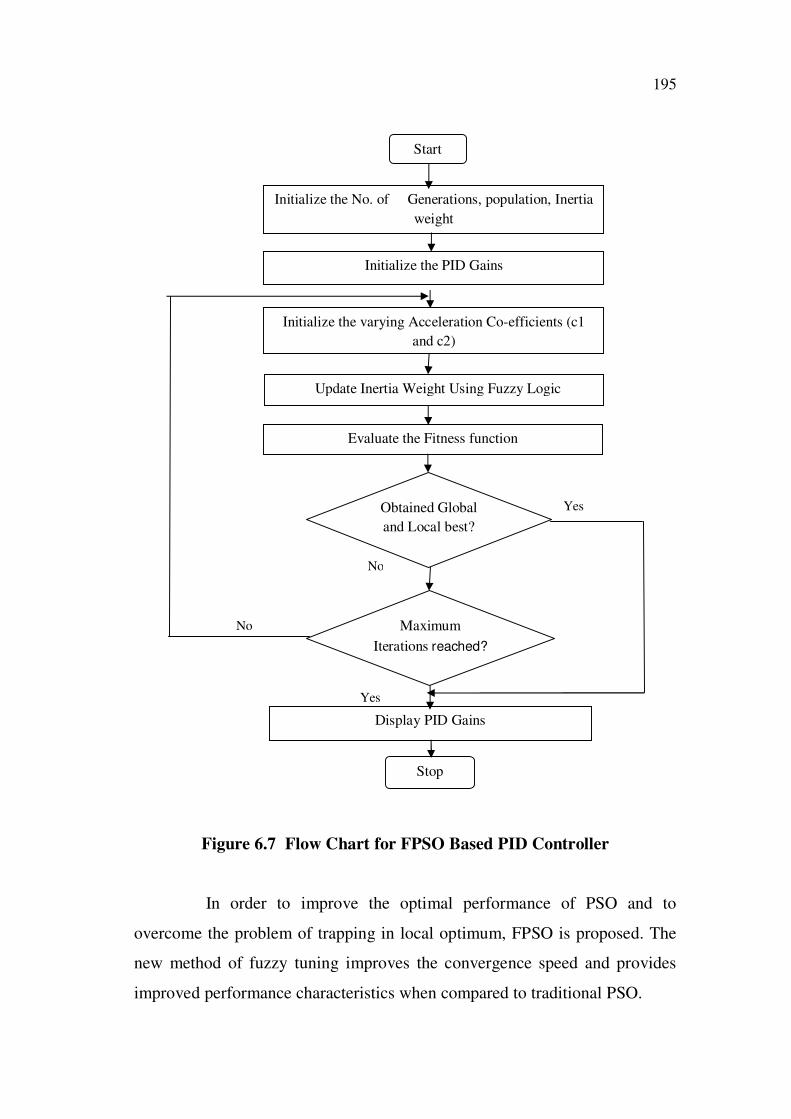
The flow chart of FPSO Based PID controller is shown in Figure 6.7.
195
Start
Initialize the No. of Generations, population, Inertia
weight
Initialize the PID Gains
Initialize the varying Acceleration Co-efficients (c1
and c2)
Display PID Gains
Evaluate the Fitness function
Update Inertia Weight Using Fuzzy Logic
Obtained Global
and Local best?
Maximum
Iterations reached?
Stop
No
Yes
Yes
No
Figure 6.7 Flow Chart for FPSO Based PID Controller
In order to improve the optimal performance of PSO and to
overcome the problem of trapping in local optimum, FPSO is proposed. The
new method of fuzzy tuning improves the convergence speed and provides
improved performance characteristics when compared to traditional PSO.
196
6.2.5 Bacterial Foraging Particle Swarm Optimization (BF-PSO)
Bacterial Foraging Optimization (BFO) is a novel optimization
algorithm Based on the social foraging behavior of E. coli bacteria. The
original BFO algorithm possesses a poor convergence behavior when
compared to the nature-inspired algorithms. The BF-PSO is Based on the idea
of combining bacterial foraging oriented particle swarm optimization. The
selection behavior of bacteria tends to eliminate poor foraging strategies and
improve successful foraging strategies. Foraging theory is Based on the
assumption of animals searching for and obtain nutrients to maximizes their
energy intake E per unit time T spent foraging. A group of bacteria move in
search of food and away from noxious elements is known as foraging
(Passino 2002). Optimal foraging theory formulates the foraging problem and
via computational or analytical methods that specify formulations for
dynamic programming. In the proposed BF-PSO approach, after undergoing a
Chemo-tactic step, each bacterium is mutated by a PSO operator (Arijit
Biswas et al 2000). In this phase, the bacterium is stochastically attracted
towards the globally best position found in the entire population at current
time and also towards its previous heading direction. In order to accelerate the
convergence speed of the bacterial colony near global optima, PSO algorithm
have been combined to BFO that resulted in a significant improvement in the
performance of the traditional PSO algorithm in terms of convergence speed,
accuracy and robustness. The PSO model consists of a swarm of particles,
which are initialized with a population of random candidate solutions. Each
particle has a position represented by a position-vector Xik where (i is the
particle representing index of bacteria try to move towards the food
concentration gradient individually to optimize the PID controller gains) and a
velocity represented by a velocity-vector Vik. Each particle remembers its
own best position PiLbest. The best position vector among the swarm then
stored in a vector PiGlobal (Kim and Cho 2005). During the iteration time k, the
197
new velocity is updated Based on the previous velocity as mentioned in
Equation (6.25).
Vid = W*Vid + C1R1 (Pid – Xid) + C2R2 (Pgd– Xid) (6.25)
The new position is then determined by the sum of the previous
position and the new velocity as shown in Equation (6.26). The movement of
the particle is decided by the memory of its best past position and the
experience of the most successful particle in the swarm.
Xid(new)=xid(old)+Vid (6.26)
In this algorithm explained below, ‘N’ denotes the number of
bacteria, ‘k’ denotes the no.of reproduction loops, and ‘ell’ denotes the
number of elimination dispersal.
Step 1: First initialize the parameters like number of bacteria S, Maximum
number of swim length Ns, Chemotactic steps Nc, The number of
reproduction steps Nre, Elimination and dispersal events Ned, Ped Cognitive
coefficient C1 and Social coefficient C2, and random numbers R1and R2.
Step 2: The values of Kp, Ki, Kd are initialized randomly within the optimal
range of values for each gains.
Step 3: Generate the random direction (n,i) and position P(i,j), dimension of
search space ‘n’, elimination and dispersal limit ‘l’ and ‘k’ is the
reproduction.
Step 4: ‘l’ is incremented by one for every cycle until it reaches the
elimination and dispersal limit l = l +1
198
Step 5: ‘k’is incremented by one for every cycle until it reaches the
Reproduction limit.
Step 6: Chemotaxis loop: j=j+1 for i=1,2,….,S, compute the fitness of J
(i,j,k,l),
J(i,j,k,l) = Fitness (p(i,j,k,l)) (6.27)
Store the best fitness function in Jlast as in Equation (6.28) and the
best fitness function for each bacteria will be selected to be the local best
Jlocal as in Equation (6.29).
Jlast(i,j,k,l) = Jlast(i,j,k,l) (6.28)
Jlocal(i,j,k,l) = Jlast(i,j,k,l) (6.29)
Update the Position and fitness function of the bacteria as given in
Equation (6.30) and allow the bacteria to swim in right direction and store the
bacteria into Jlast using Equation (6.31).
P(i,j+1)=p(i,j)+c(i)* (n,i) (6.30)
Jlast=(i,j+1,k,l) (6.31)
Store the Jlast and update the position of the bacteria using fitness
function
P(i,j+1,k,l)=p(i,j,k,l)+c(i)* (n,i) (6.32)
Step 7: Evaluate the local best position Pl(best) in Equation (6.33) and global
best position Pg(best) in Equation (6.34) for each bacterium.

199
Pcurrent(i,j+1)=p(i,j+1) (6.33)
Jlocal(i,j+1)jlast(i,j+1) (6.34)
Step 8: Update position and velocity of the dth coordinate of the ith bacterium
according to the Equations (6.35) and (6.36)
Vid=w*vid+c1Ri(Plbest-Pcurrent)+c2R2(Pgbest-Pcurrent) (6.35)
dnew
(i,j+1,k)= dold
(I,j+1,k)+ (6.36)
Step 9: In Reproduction, for the given k and l, and for each i = 1, 2,. . . ,N,
the health of the bacterium ‘i’ is obtained as in Equation (6.37)
Jhealth=sum(J(i,j,k,l) (6.37)
Sort bacteria and chemotactic parameters C(i) in order of ascending
cost Jhealth (higher cost means lower health).
Substep: The Sr bacteria with the highest Jhealth values die and the remaining
Sr bacteria with the best values split (this process is performed by the copies
that are made are placed at the same location as their parent) into i and i +Sr
as given by Equation (6.38).
P(i+Sr,j,k+1,l)=p(i,j,k+1,l) (6.38)
Step 10: If k<Nre go to step 5. (In case, if the specified number of
reproduction is not reached, start the next generation in chemo-taxis until the
best solution is obtained).
Step 12: Elimination–dispersal: For i = 1,2,. . . ,N, with probability Ped,
eliminate and disperse each bacterium, which results in keeping the number of
bacteria in the population constant. To do this, if a bacterium is eliminated,
200
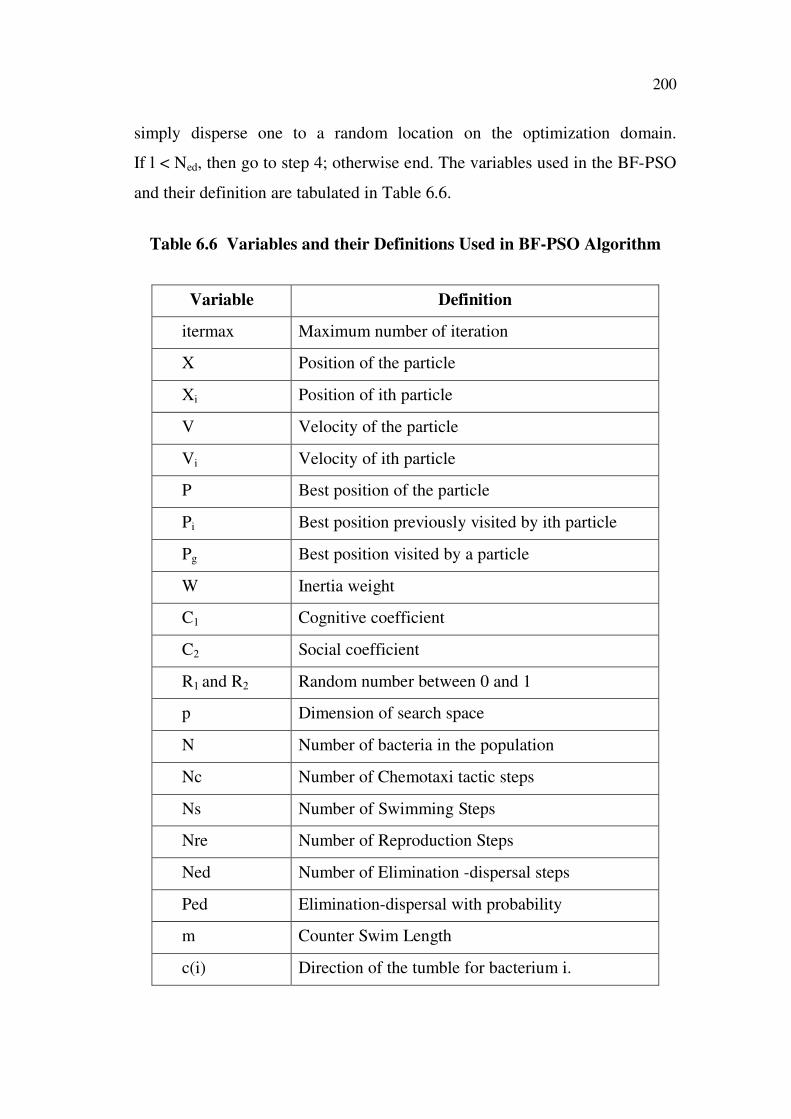
simply disperse one to a random location on the optimization domain.
If l < Ned, then go to step 4; otherwise end. The variables used in the BF-PSO
and their definition are tabulated in Table 6.6.
Table 6.6 Variables and their Definitions Used in BF-PSO Algorithm
Variable Definition
itermax Maximum number of iteration
X Position of the particle
Xi Position of ith particle
V Velocity of the particle
Vi Velocity of ith particle
P Best position of the particle
Pi Best position previously visited by ith particle
Pg Best position visited by a particle
W Inertia weight
C1 Cognitive coefficient
C2 Social coefficient
R1 and R2 Random number between 0 and 1
p Dimension of search space
N Number of bacteria in the population
Nc Number of Chemotaxi tactic steps
Ns Number of Swimming Steps
Nre Number of Reproduction Steps
Ned Number of Elimination -dispersal steps
Ped Elimination-dispersal with probability
m Counter Swim Length
c(i) Direction of the tumble for bacterium i.
201
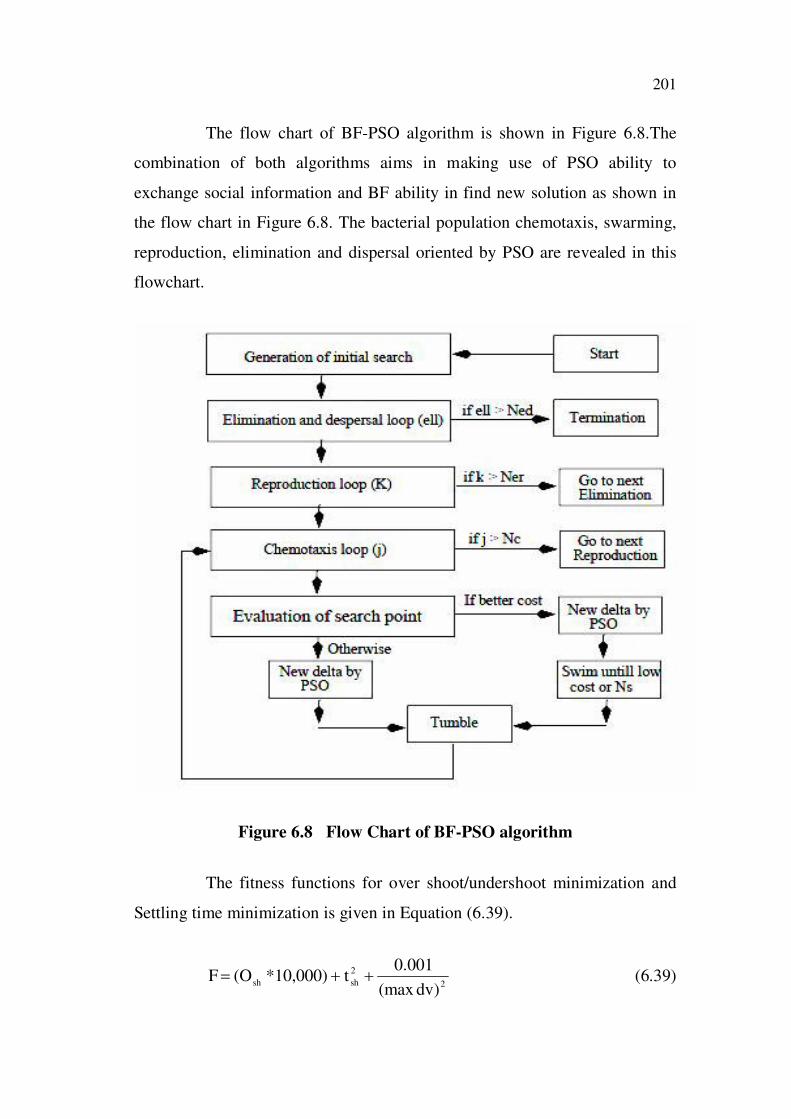
The flow chart of BF-PSO algorithm is shown in Figure 6.8.The
combination of both algorithms aims in making use of PSO ability to
exchange social information and BF ability in find new solution as shown in
the flow chart in Figure 6.8. The bacterial population chemotaxis, swarming,
reproduction, elimination and dispersal oriented by PSO are revealed in this
flowchart.
Figure 6.8 Flow Chart of BF-PSO algorithm
The fitness functions for over shoot/undershoot minimization and
Settling time minimization is given in Equation (6.39).
2
2
shsh)dv(max
001.0t10,000)*(OF (6.39)
202
where, Osh is overshoot, 2
sht is settling time and maxdv is maximum deviation.
Minimization of F corresponds to a minimum overshoot (Osh), minimum
settling time (tsh), and maximum deviation (max dv). Hence, a set of good
control parameters Kp, Ki, Kd is generated and yields a good response that will
result in performance criteria minimization in the time domain (Korani et al
2008).
6.2.6 Hybrid Genetic Algorithm (HGA)
Recent surveys of GA, relating to improvements in the search
process with respect to control system engineering problems can be found in
(Michalewicz 1999) (Tsutsui and Goldberg 2002) (Yoshida et al 2000). Inter-
mixing the salient features of the algorithms may be found to be more
effective in specific application areas like power system operation and
control. Recently, hybridization of the evolutionary algorithm is getting
popular due to their capabilities in handling several real world problems
involving complexity, noisy environment, imprecision, uncertainty, and
vagueness (Grosan and Abraham 2007). Even though EA belongs to the same
basic skeleton called Evolution Strategies, it is differentiated by the way the
hybridization of the algorithm is developed. These optimization models could
provide a social foraging environment where groups of parameters
communicate cooperatively for finding solutions to engineering problems
(Kim and Cho 2006). HGA is most suitable for parameter optimization
problem, particularly when the control structure is provided. A typical task of
Hybrid-GA is to find the best values of a predefined set of control parameters
associated with process model. The major advantages of HGA are capability
enhancement, improved quality and efficiency in reaching the global solution.
The steps involved in Hybrid Genetic Algorithm are as follows:
203
Step 1 Initialize the parameters like number of bacteria in the population S,
Maximum number of swim length Ns, Chemotactic steps Nc, The number of
reproduction steps Nre, Elimination-dispersal events Ned, Elimination-
dispersal with probability Ped .
Step 2: Evaluate all the chromosomes according to the fitness function in
Equation (6.46. The fitness function exactly fits the problem of the solution
space and the chromosome. The best fitness value is kept as the best solution
set.
Step 3: In the chemotactic process, the bacteria climb the nutrient
concentration, avoid noxious substances, and search for a way out of neutral
media. The bacterium usually takes a tumble followed by a run. For Nc the
direction of movement after a tumble is given in Equation (6.40).
)i()i(
)i()i(C)k,lj,i()k,lj,i(
T(6.40)
If the cost at i(j+1,k,l) is better than the cost at (i,j,k,l) then the
bacterium takes another step of size C(i) in that direction. This process will be
continued until the number of steps taken is not greater than Ns.
Step 4: After evaluating chemotaxis the bacteria climb the swarming,
Bacteria in times of stresses release attractants to signal bacteria to swarm
together. It, however, also releases a repellant to signal others to be at a
minimum distance from it. Thus all of them will have a cell to cell attraction
via attractant and cell to cell repulsion via repellant as in Equation ( 6.40).
Step 5: In the selection process, part of the chromosomes will be eliminated
and remaining chromosomes will be selected.

204
Step 6: The crossover operator produces two off springs (new candidate
solutions) by recombining the information from two parents is given in
Equation (6.41) and Equation (6.42).
ju
x
u
jx1x~
jv (6.41)
jv
x
v
jx1x~
ju (6.42)
Step 7: In mutation rate, several chromosomes will be selected from the
population, and then randomly change the value of parts of the dimensions.
This will give the population a larger chance to generate new species. For
optimization, it is chance to get an abrupt evolution shown in Equation (6.43).
0),xx~,k(x~0),x~x,k(x~
x)L(
jjj
j
)U(
jj
j(6.43)
Step 8: After the mutation steps have been covered, a reproduction step takes
place. The fitness (accumulated cost) of the bacteria is sorted in ascending
order. Sr (Sr=S/2) bacteria having higher fitness die and the remaining Sr is
allowed to split into two thus keeping the population size constant which is
given by ITSEihealth in Equation ( 6.44).
1N
1j
i
health
c
)l,k,j,i(ITSEITSE (6.44)
let i=1,2…N be the health of the bacterium i. The Sr bacteria with the highest
ITSEhealth values die and the remaining Sr bacteria with the best values will
split.
Step 9: The steps 2 to 6 are repeated until the maximum iteration is reached,
else go to step 3 and start the next generation of the chemotactic loop.
205
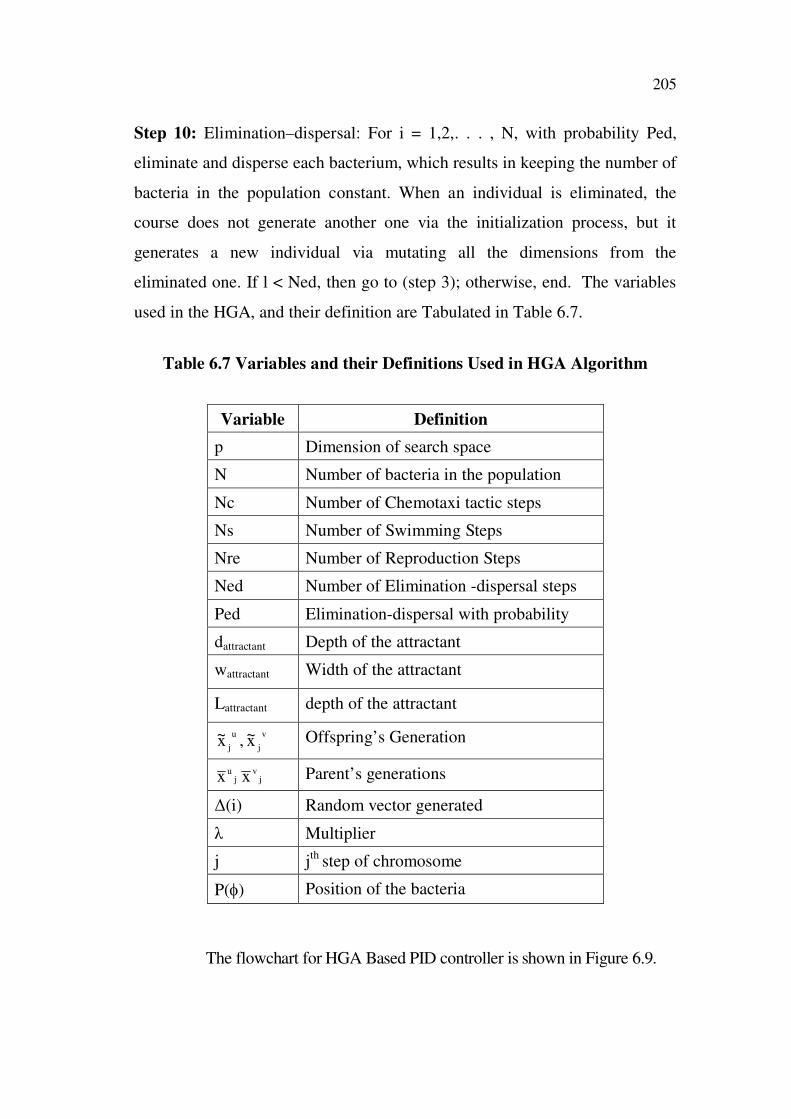
Step 10: Elimination–dispersal: For i = 1,2,. . . , N, with probability Ped,
eliminate and disperse each bacterium, which results in keeping the number of
bacteria in the population constant. When an individual is eliminated, the
course does not generate another one via the initialization process, but it
generates a new individual via mutating all the dimensions from the
eliminated one. If l < Ned, then go to (step 3); otherwise, end. The variables
used in the HGA, and their definition are Tabulated in Table 6.7.
Table 6.7 Variables and their Definitions Used in HGA Algorithm
Variable Definition
p Dimension of search space
N Number of bacteria in the population
Nc Number of Chemotaxi tactic steps
Ns Number of Swimming Steps
Nre Number of Reproduction Steps
Ned Number of Elimination -dispersal steps
Ped Elimination-dispersal with probability
dattractant Depth of the attractant
wattractant Width of the attractant
Lattractant depth of the attractant
u
jx~ ,
v
jx~ Offspring’s Generation
jux j
vx Parent’s generations
(i) Random vector generated
Multiplier
j jth
step of chromosome
P( ) Position of the bacteria
The flowchart for HGA Based PID controller is shown in Figure 6.9.
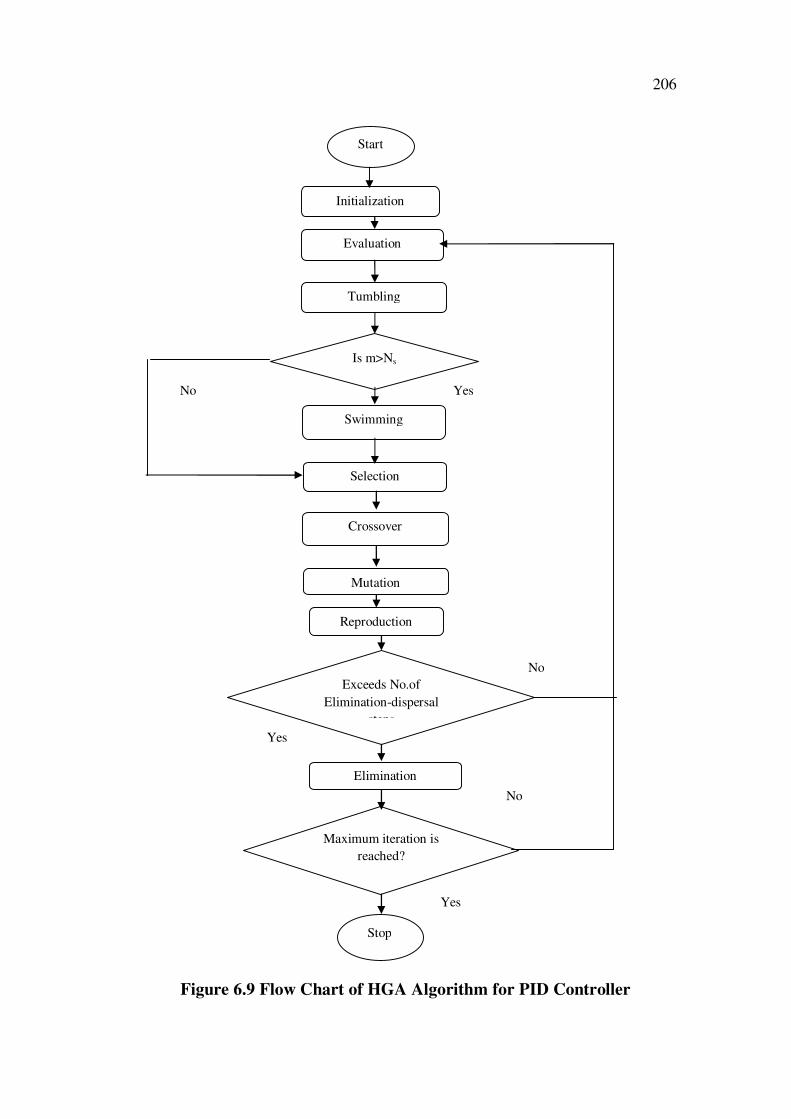
206
Start
Initialization
Evaluation
Tumbling
Is m>Ns
Crossover
Mutation
Swimming
Selection
Reproduction
Elimination
Exceeds No.of
Elimination-dispersal
steps
Maximum iteration is
reached?
Stop
Yes
No
No
Yes
No
Yes
Figure 6.9 Flow Chart of HGA Algorithm for PID Controller
207
The fitness function for HGA is defined in Equation (6.45). The
objective function measures the performance of the system. The fitness
function for HGA is defined as the Integral of Time multiplied by the
Absolute value of Error (ITAE) of the corresponding system. Therefore, it
becomes an unconstrained optimization problem to find a set of decision
variables by minimizing the objective function. The fitness of each particle is
evaluated using the ITAE fitness function as in Equation (6.45).
ess
)M)tmax(
ts(e
)k,k,k(Fmin
0
dip (6.45)
where,
=(1-e- )*|1-tr/max(t)| (6.46)
Kp, Ki, Kd is the optimal gains of PID controller, is the weighting factor,
Mo is the overshoot, ts settling time, ess is the steady state error. If the
weighting factor increases, the rising time of the response curve is small and
when decreases, the rising time also decreases (Kim and Park 2005). The
advanced HGA proposed in this research for PID gain tuning has been better
searching speed than the original GA.
6.3 DESIGN OF EA BASED PID CONTROLLER
In Conventional PID controller, the gains are randomly selected by
trial and error method. In this research, EA finds the Proportional, Integral
and Derivative gains of the PID controller, and the values are transferred to
the PID controller. In these algorithms, the gains of PID controller are
searched in the feasible region of response until a determined objective
function is minimized. In design of EA Based controllers, it is desirable that
controlled system include suitable transient and steady state response. Hence,
208
the important characteristics of the system such as overshoot, settling time
and oscillations are improved. Based on the input parameters and on the
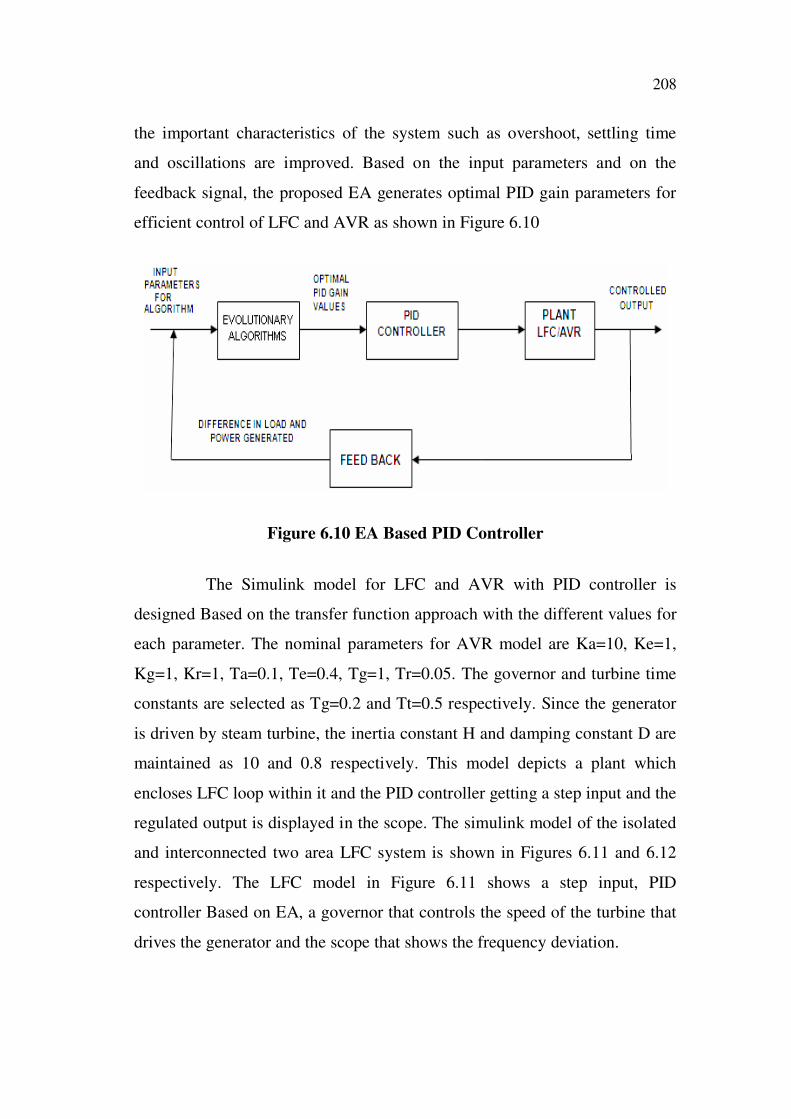
feedback signal, the proposed EA generates optimal PID gain parameters for
efficient control of LFC and AVR as shown in Figure 6.10
Figure 6.10 EA Based PID Controller
The Simulink model for LFC and AVR with PID controller is
designed Based on the transfer function approach with the different values for
each parameter. The nominal parameters for AVR model are Ka=10, Ke=1,
Kg=1, Kr=1, Ta=0.1, Te=0.4, Tg=1, Tr=0.05. The governor and turbine time
constants are selected as Tg=0.2 and Tt=0.5 respectively. Since the generator
is driven by steam turbine, the inertia constant H and damping constant D are
maintained as 10 and 0.8 respectively. This model depicts a plant which
encloses LFC loop within it and the PID controller getting a step input and the
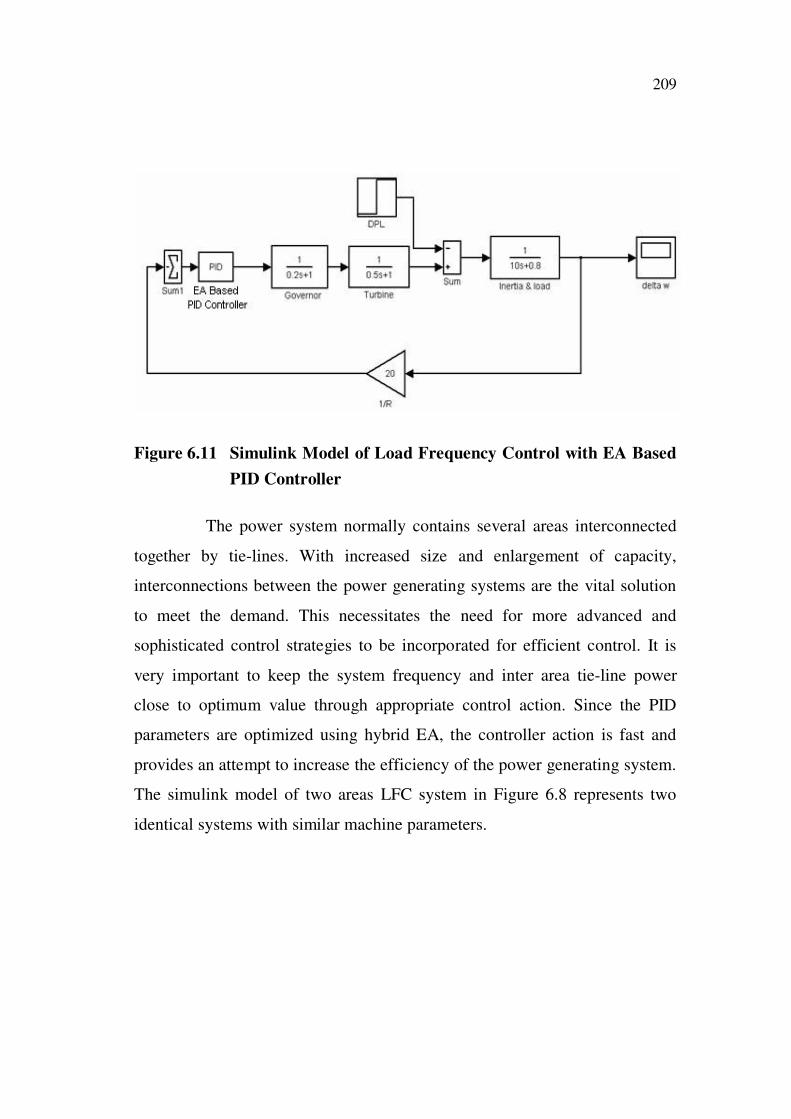
regulated output is displayed in the scope. The simulink model of the isolated
and interconnected two area LFC system is shown in Figures 6.11 and 6.12
respectively. The LFC model in Figure 6.11 shows a step input, PID
controller Based on EA, a governor that controls the speed of the turbine that
drives the generator and the scope that shows the frequency deviation.
209
Figure 6.11 Simulink Model of Load Frequency Control with EA Based
PID Controller
The power system normally contains several areas interconnected
together by tie-lines. With increased size and enlargement of capacity,
interconnections between the power generating systems are the vital solution
to meet the demand. This necessitates the need for more advanced and
sophisticated control strategies to be incorporated for efficient control. It is
very important to keep the system frequency and inter area tie-line power
close to optimum value through appropriate control action. Since the PID
parameters are optimized using hybrid EA, the controller action is fast and
provides an attempt to increase the efficiency of the power generating system.
The simulink model of two areas LFC system in Figure 6.8 represents two
identical systems with similar machine parameters.
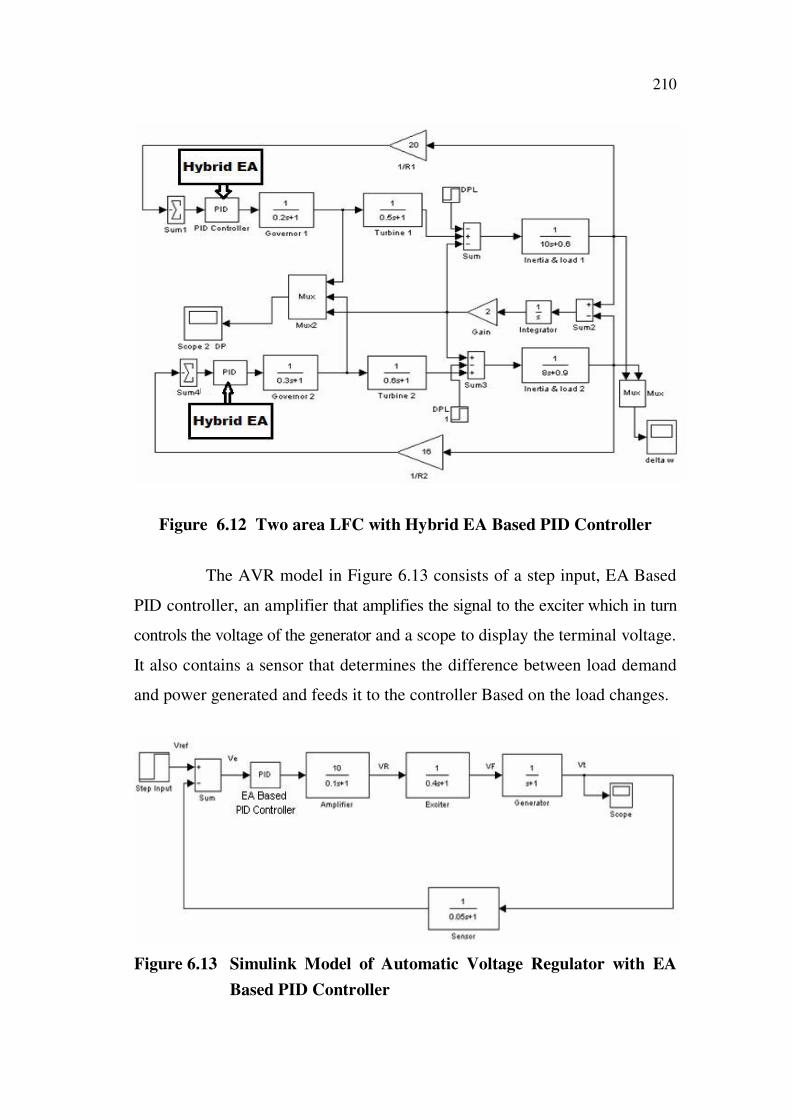
210
Figure 6.12 Two area LFC with Hybrid EA Based PID Controller
The AVR model in Figure 6.13 consists of a step input, EA Based
PID controller, an amplifier that amplifies the signal to the exciter which in turn
controls the voltage of the generator and a scope to display the terminal voltage.
It also contains a sensor that determines the difference between load demand
and power generated and feeds it to the controller Based on the load changes.
Figure 6.13 Simulink Model of Automatic Voltage Regulator with EA
Based PID Controller
211
6.4 SIMULATION RESULTS
The essential requirements of AGC are a continuous balance
between electrical power generation and a varying load demand, while
maintaining system frequency, voltage levels and the power grid security.
AGC is decentralized control operating in each control area to monitor the
frequency and voltage of a power generating system. LFC and AVR are
installed in each generator to maintain constant frequency and voltage under
different operating conditions. The effectiveness of the proposed hybrid EA is
evaluated and compared for damping the system oscillations during small and
large disturbances. The simulation results for Load Frequency Control (LFC)
and Automatic Voltage Regulator (AVR) are given for a single area system to
quantify the benefits of hybrid EA Based PID controllers. The simulation was
done using the Simulink package available in MATLAB R2008b. The LFC
and AVR were simulated on Intel core 2 Duo (2.4 GHz), 3GB RAM PC.
Simulink model for LFC and AVR with EA Based PID controller is
constructed Based on the transfer function model of the turbo alternator with
non-reheat type turbine. The Kp, KI and Kd values for the PID controller are
obtained by running the M-file that calls the fitness function to evaluate the
fitness of the solution. The simulation was performed for different load and
regulations, and the results are discussed in this section.
6.4.1 EPSO Based PID Controller
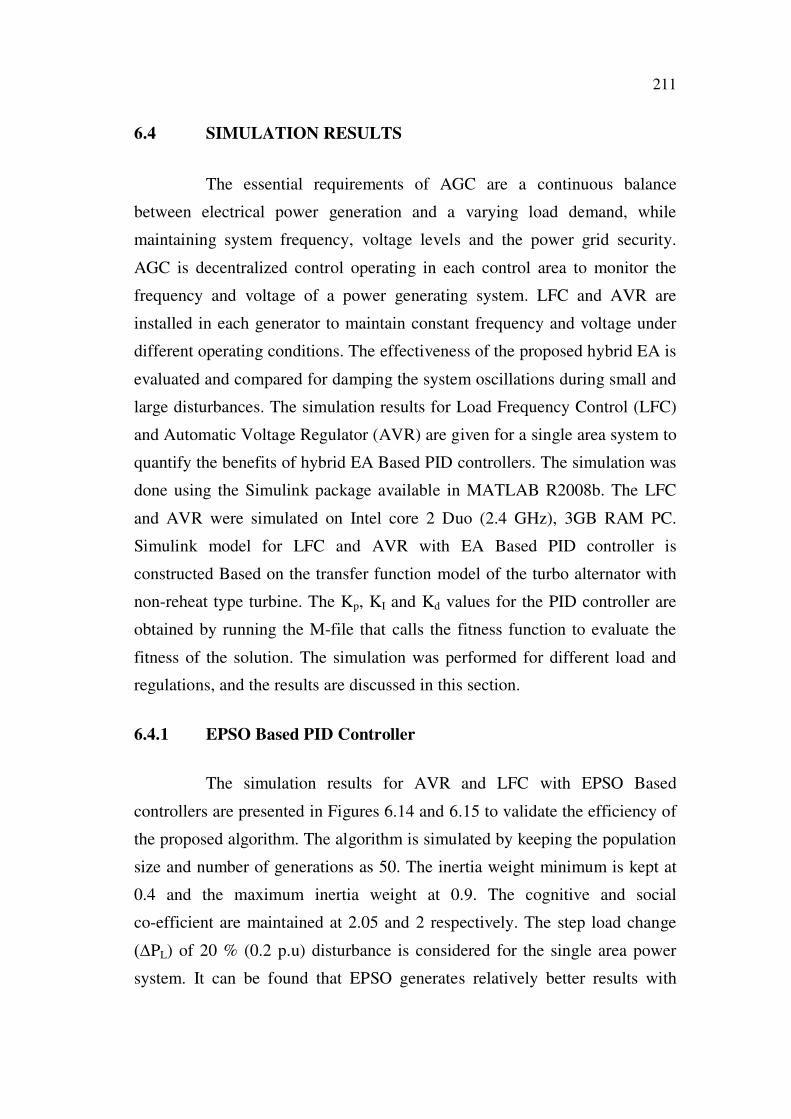
The simulation results for AVR and LFC with EPSO Based
controllers are presented in Figures 6.14 and 6.15 to validate the efficiency of
the proposed algorithm. The algorithm is simulated by keeping the population
size and number of generations as 50. The inertia weight minimum is kept at
0.4 and the maximum inertia weight at 0.9. The cognitive and social
co-efficient are maintained at 2.05 and 2 respectively. The step load change
PL) of 20 % (0.2 p.u) disturbance is considered for the single area power
system. It can be found that EPSO generates relatively better results with
212
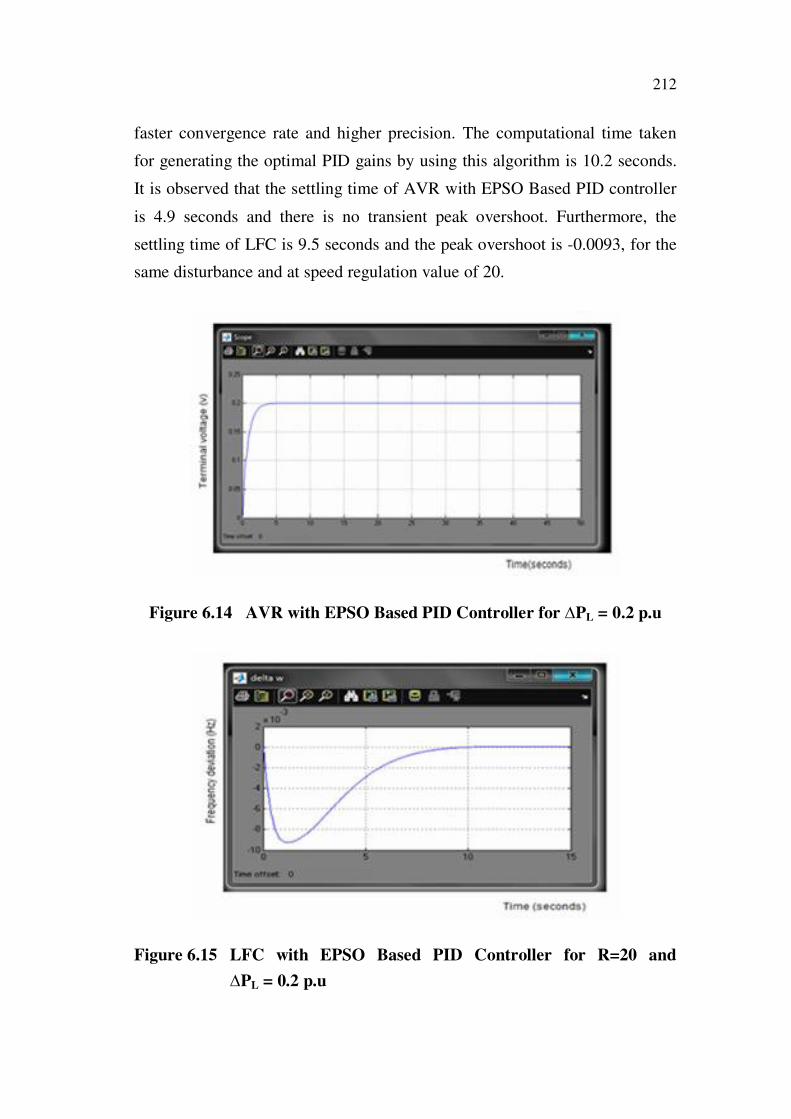
faster convergence rate and higher precision. The computational time taken
for generating the optimal PID gains by using this algorithm is 10.2 seconds.
It is observed that the settling time of AVR with EPSO Based PID controller
is 4.9 seconds and there is no transient peak overshoot. Furthermore, the
settling time of LFC is 9.5 seconds and the peak overshoot is -0.0093, for the
same disturbance and at speed regulation value of 20.
Figure 6.14 AVR with EPSO Based PID Controller for PL = 0.2 p.u
Figure 6.15 LFC with EPSO Based PID Controller for R=20 and
PL = 0.2 p.u
213
When compared to conventional PID controller the settling time of
AVR is reduced by 88% and no oscillation with overshoot is noticed due to
load fluctuations. The results also indicate that the proposed controller could
create a very perfect step response of the terminal voltage in AVR system.
The settling time, peak overshoot and oscillations of LFC are reduced by
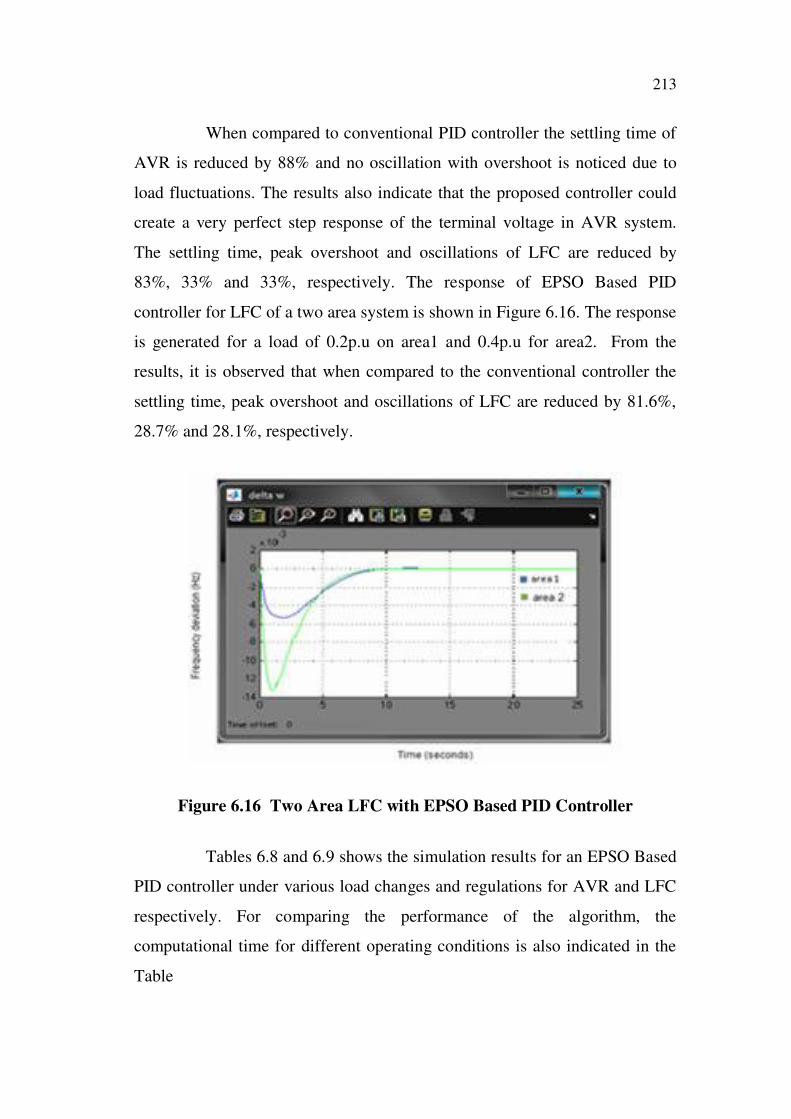
83%, 33% and 33%, respectively. The response of EPSO Based PID
controller for LFC of a two area system is shown in Figure 6.16. The response
is generated for a load of 0.2p.u on area1 and 0.4p.u for area2. From the
results, it is observed that when compared to the conventional controller the
settling time, peak overshoot and oscillations of LFC are reduced by 81.6%,
28.7% and 28.1%, respectively.
Figure 6.16 Two Area LFC with EPSO Based PID Controller
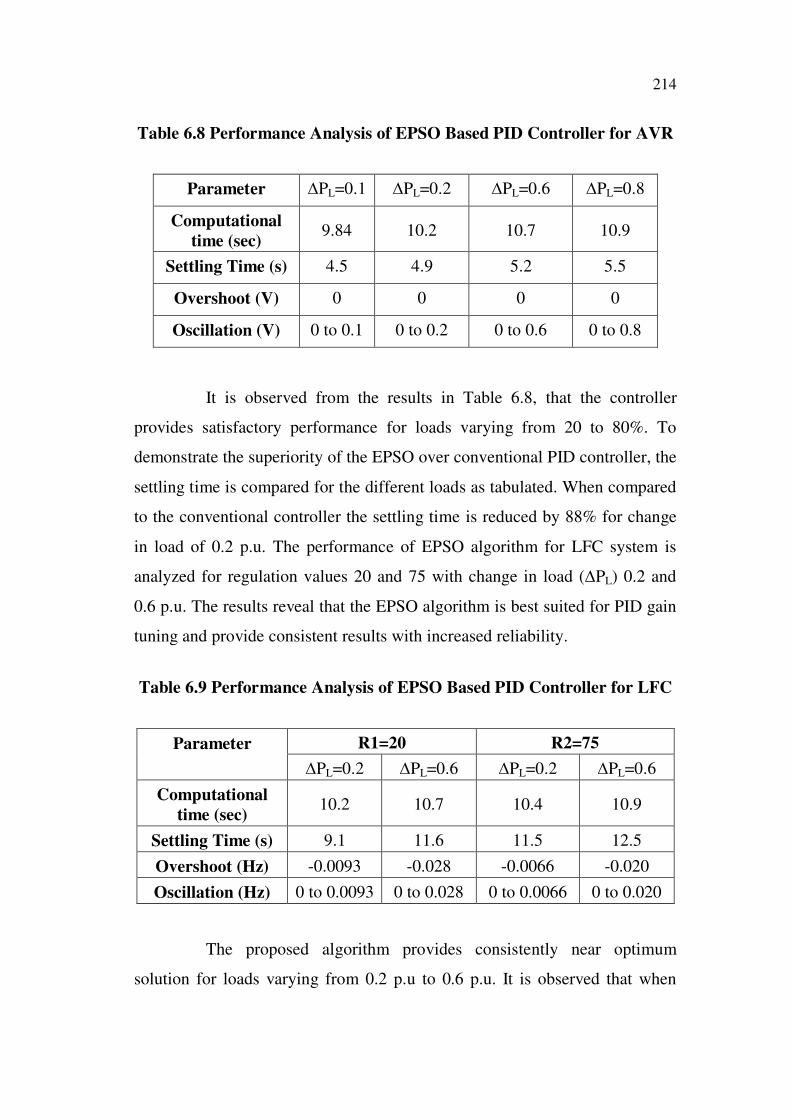
Tables 6.8 and 6.9 shows the simulation results for an EPSO Based
PID controller under various load changes and regulations for AVR and LFC
respectively. For comparing the performance of the algorithm, the
computational time for different operating conditions is also indicated in the
Table
214
Table 6.8 Performance Analysis of EPSO Based PID Controller for AVR
Parameter PL=0.1 PL=0.2 PL=0.6 PL=0.8
Computational
time (sec)9.84 10.2 10.7 10.9
Settling Time (s) 4.5 4.9 5.2 5.5
Overshoot (V) 0 0 0 0
Oscillation (V) 0 to 0.1 0 to 0.2 0 to 0.6 0 to 0.8
It is observed from the results in Table 6.8, that the controller
provides satisfactory performance for loads varying from 20 to 80%. To
demonstrate the superiority of the EPSO over conventional PID controller, the
settling time is compared for the different loads as tabulated. When compared
to the conventional controller the settling time is reduced by 88% for change
in load of 0.2 p.u. The performance of EPSO algorithm for LFC system is
analyzed for regulation values 20 and 75 with change in load ( PL) 0.2 and
0.6 p.u. The results reveal that the EPSO algorithm is best suited for PID gain
tuning and provide consistent results with increased reliability.
Table 6.9 Performance Analysis of EPSO Based PID Controller for LFC
R1=20 R2=75Parameter
PL=0.2 PL=0.6 PL=0.2 PL=0.6
Computational
time (sec)10.2 10.7 10.4 10.9
Settling Time (s) 9.1 11.6 11.5 12.5
Overshoot (Hz) -0.0093 -0.028 -0.0066 -0.020
Oscillation (Hz) 0 to 0.0093 0 to 0.028 0 to 0.0066 0 to 0.020
The proposed algorithm provides consistently near optimum
solution for loads varying from 0.2 p.u to 0.6 p.u. It is observed that when
215
compared to the conventional controller the settling time, peak overshoot and
oscillations of LFC are reduced by 83%, 33% and 33%, respectively for
regulation R as 75 with 20% increase in load.
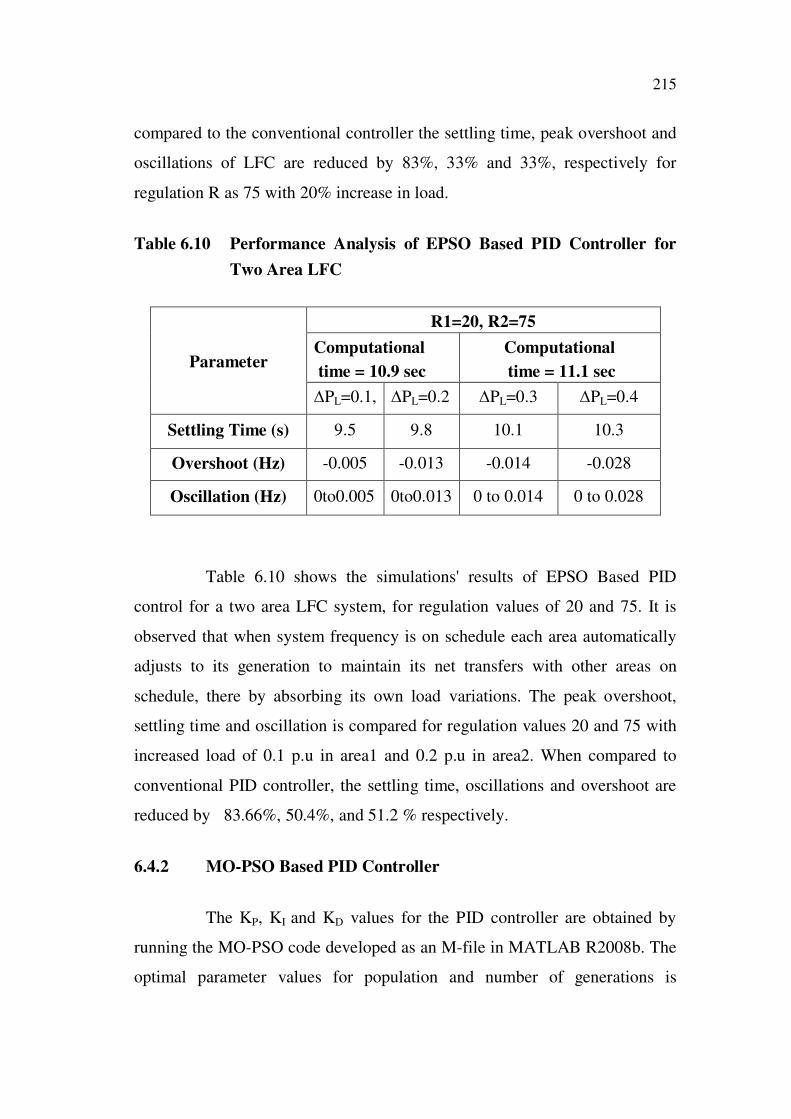
Table 6.10 Performance Analysis of EPSO Based PID Controller for
Two Area LFC
R1=20, R2=75
Computational
time = 10.9 sec
Computational
time = 11.1 secParameter
PL=0.1, PL=0.2 PL=0.3 PL=0.4
Settling Time (s) 9.5 9.8 10.1 10.3
Overshoot (Hz) -0.005 -0.013 -0.014 -0.028
Oscillation (Hz) 0to0.005 0to0.013 0 to 0.014 0 to 0.028
Table 6.10 shows the simulations' results of EPSO Based PID
control for a two area LFC system, for regulation values of 20 and 75. It is
observed that when system frequency is on schedule each area automatically
adjusts to its generation to maintain its net transfers with other areas on
schedule, there by absorbing its own load variations. The peak overshoot,
settling time and oscillation is compared for regulation values 20 and 75 with
increased load of 0.1 p.u in area1 and 0.2 p.u in area2. When compared to
conventional PID controller, the settling time, oscillations and overshoot are
reduced by 83.66%, 50.4%, and 51.2 % respectively.
6.4.2 MO-PSO Based PID Controller
The KP, KI and KD values for the PID controller are obtained by
running the MO-PSO code developed as an M-file in MATLAB R2008b. The
optimal parameter values for population and number of generations is
216
maintained at 50 and 25 for both LFC and AVR. The cognitive and social co-
efficient are maintained at 2.05 and 3 respectively. The PID gain values are
transferred to the AVR and LFC simulink model for simulating with different
load and regulation values. In proposed hybrid MO-PSO algorithm, the
objective functions are collectively minimized by assigning weight for
different objective functions. The computational time for the particle convergence
to the optimum values of PID gains in MO-PSO is 14.35 seconds for a change
in load of PL=0.1. In order demonstrate the stability of the algorithm the
computational time taken for convergence is tabulated in Tables 6.9 and 6.10.
The simulation results for AVR and LFC with MO-PSO Based PID controller
under various load changes and regulations are tabulated in Tables 6.11 and
6.12, respectively.
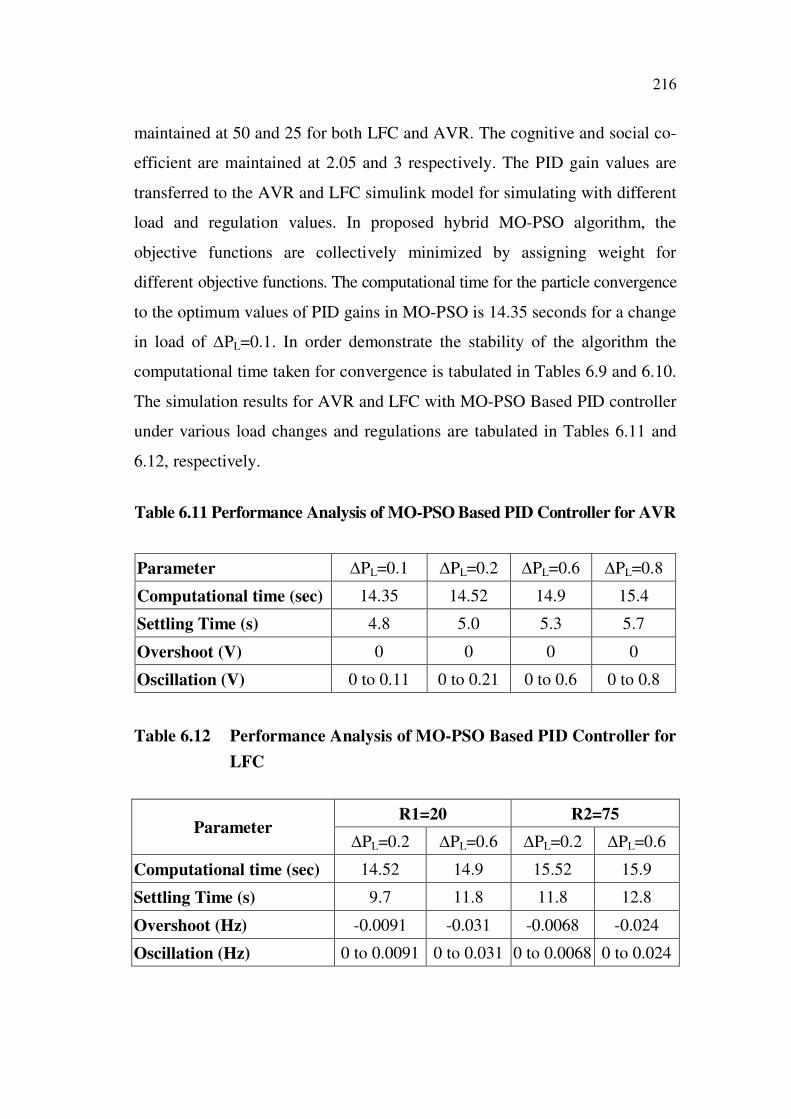
Table 6.11 Performance Analysis of MO-PSO Based PID Controller for AVR
Parameter PL=0.1 PL=0.2 PL=0.6 PL=0.8
Computational time (sec) 14.35 14.52 14.9 15.4
Settling Time (s) 4.8 5.0 5.3 5.7
Overshoot (V) 0 0 0 0
Oscillation (V) 0 to 0.11 0 to 0.21 0 to 0.6 0 to 0.8
Table 6.12 Performance Analysis of MO-PSO Based PID Controller for
LFC
R1=20 R2=75Parameter
PL=0.2 PL=0.6 PL=0.2 PL=0.6
Computational time (sec) 14.52 14.9 15.52 15.9
Settling Time (s) 9.7 11.8 11.8 12.8
Overshoot (Hz) -0.0091 -0.031 -0.0068 -0.024
Oscillation (Hz) 0 to 0.0091 0 to 0.031 0 to 0.0068 0 to 0.024
217
As shown in Table 6.12, when compared to the conventional
controller the settling time, peak overshoot and oscillations are reduced by
81%, 34% and 34%, respectively for change in load of 0.2 p.u. with
regulation value of 20. The settling time of AVR for a change in load of
PL=0.1 is reduced by 87% as compared to the conventional controller. The
results in Table 6.13 are obtained for two area model under different
regulations, R1=20 and R2=75 for change in load of PL1and PL2 varying
from 0.1 to 0.4pu.
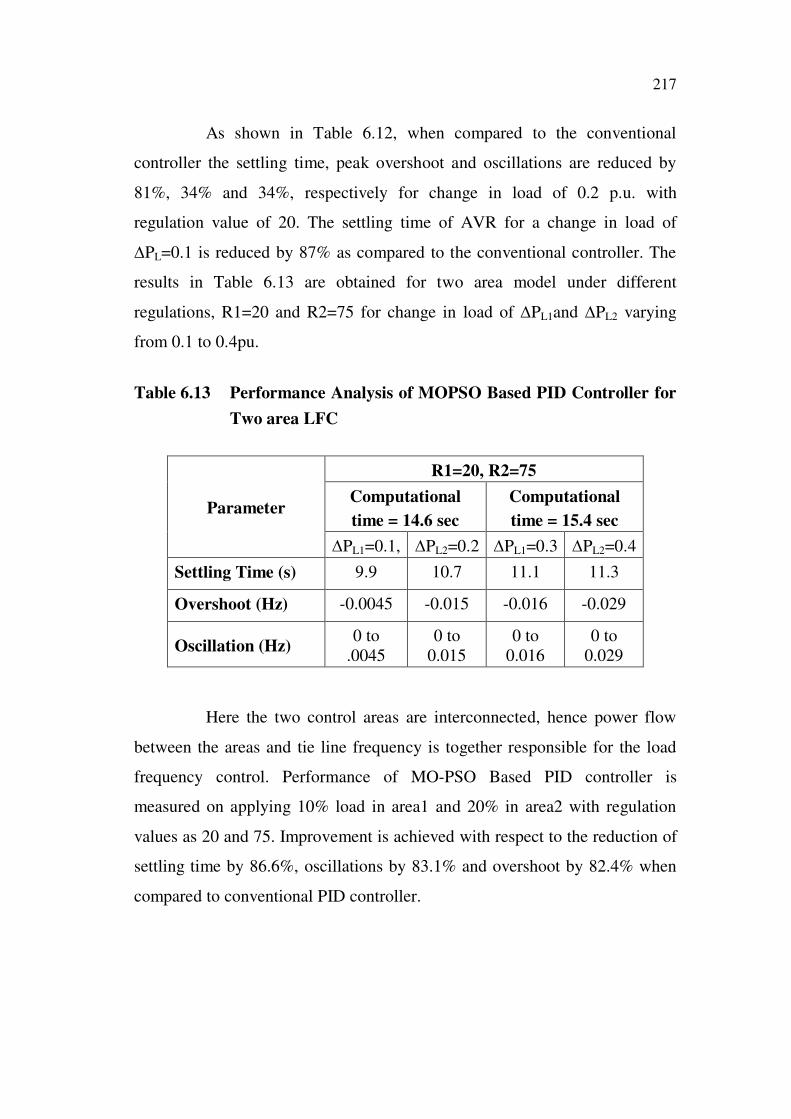
Table 6.13 Performance Analysis of MOPSO Based PID Controller for
Two area LFC
R1=20, R2=75
Computational
time = 14.6 sec
Computational
time = 15.4 secParameter
PL1=0.1, PL2=0.2 PL1=0.3 PL2=0.4
Settling Time (s) 9.9 10.7 11.1 11.3
Overshoot (Hz) -0.0045 -0.015 -0.016 -0.029
Oscillation (Hz)0 to
.0045
0 to
0.015
0 to
0.016
0 to
0.029
Here the two control areas are interconnected, hence power flow
between the areas and tie line frequency is together responsible for the load
frequency control. Performance of MO-PSO Based PID controller is
measured on applying 10% load in area1 and 20% in area2 with regulation
values as 20 and 75. Improvement is achieved with respect to the reduction of
settling time by 86.6%, oscillations by 83.1% and overshoot by 82.4% when
compared to conventional PID controller.
218
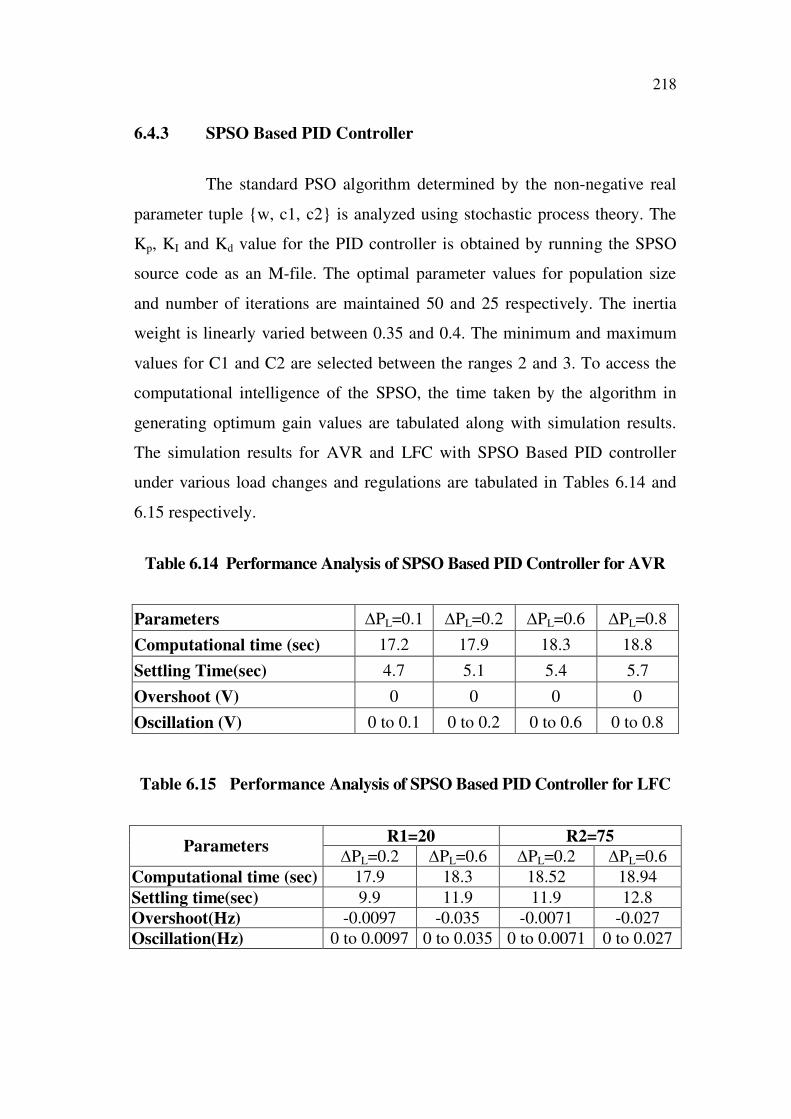
6.4.3 SPSO Based PID Controller
The standard PSO algorithm determined by the non-negative real
parameter tuple {w, c1, c2} is analyzed using stochastic process theory. The
Kp, KI and Kd value for the PID controller is obtained by running the SPSO
source code as an M-file. The optimal parameter values for population size
and number of iterations are maintained 50 and 25 respectively. The inertia
weight is linearly varied between 0.35 and 0.4. The minimum and maximum
values for C1 and C2 are selected between the ranges 2 and 3. To access the
computational intelligence of the SPSO, the time taken by the algorithm in
generating optimum gain values are tabulated along with simulation results.
The simulation results for AVR and LFC with SPSO Based PID controller
under various load changes and regulations are tabulated in Tables 6.14 and
6.15 respectively.
Table 6.14 Performance Analysis of SPSO Based PID Controller for AVR
Parameters PL=0.1 PL=0.2 PL=0.6 PL=0.8
Computational time (sec) 17.2 17.9 18.3 18.8
Settling Time(sec) 4.7 5.1 5.4 5.7
Overshoot (V) 0 0 0 0
Oscillation (V) 0 to 0.1 0 to 0.2 0 to 0.6 0 to 0.8
Table 6.15 Performance Analysis of SPSO Based PID Controller for LFC
R1=20 R2=75Parameters
PL=0.2 PL=0.6 PL=0.2 PL=0.6
Computational time (sec) 17.9 18.3 18.52 18.94
Settling time(sec) 9.9 11.9 11.9 12.8
Overshoot(Hz) -0.0097 -0.035 -0.0071 -0.027
Oscillation(Hz) 0 to 0.0097 0 to 0.035 0 to 0.0071 0 to 0.027
219
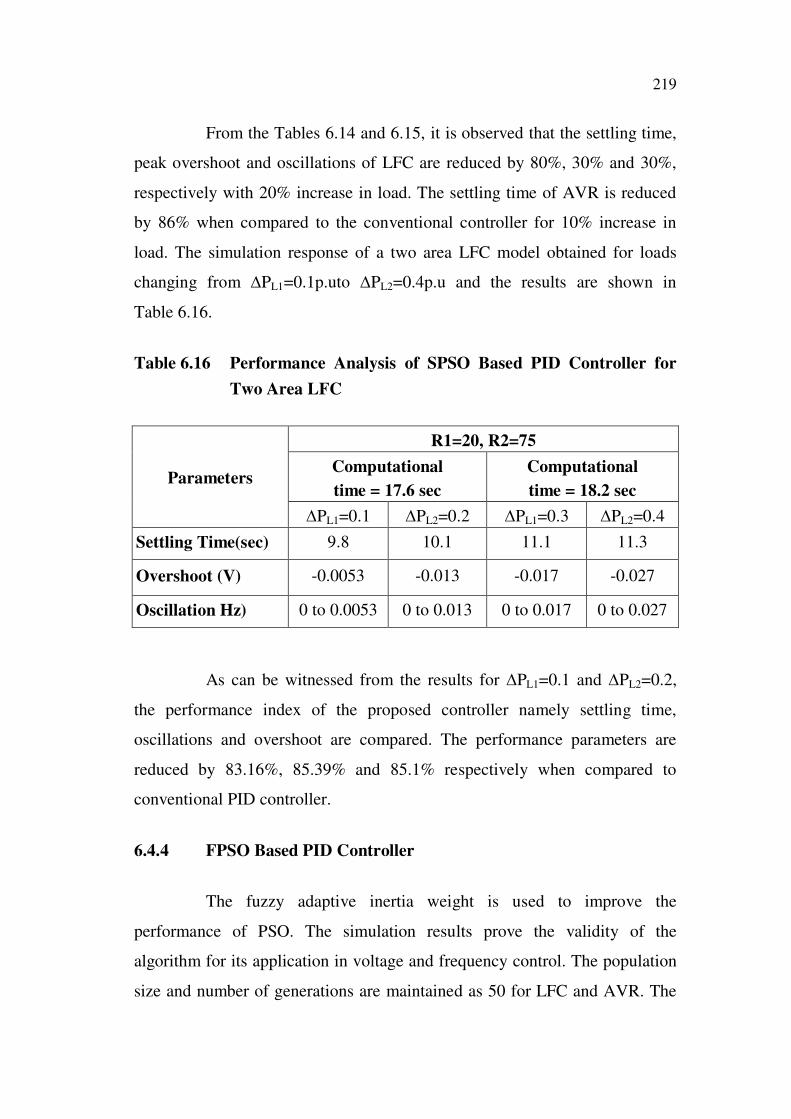
From the Tables 6.14 and 6.15, it is observed that the settling time,
peak overshoot and oscillations of LFC are reduced by 80%, 30% and 30%,
respectively with 20% increase in load. The settling time of AVR is reduced
by 86% when compared to the conventional controller for 10% increase in
load. The simulation response of a two area LFC model obtained for loads
changing from PL1=0.1p.uto PL2=0.4p.u and the results are shown in
Table 6.16.
Table 6.16 Performance Analysis of SPSO Based PID Controller for
Two Area LFC
R1=20, R2=75
Computational
time = 17.6 sec
Computational
time = 18.2 secParameters
PL1=0.1 PL2=0.2 PL1=0.3 PL2=0.4
Settling Time(sec) 9.8 10.1 11.1 11.3
Overshoot (V) -0.0053 -0.013 -0.017 -0.027
Oscillation Hz) 0 to 0.0053 0 to 0.013 0 to 0.017 0 to 0.027
As can be witnessed from the results for PL1=0.1 and PL2=0.2,
the performance index of the proposed controller namely settling time,
oscillations and overshoot are compared. The performance parameters are
reduced by 83.16%, 85.39% and 85.1% respectively when compared to
conventional PID controller.
6.4.4 FPSO Based PID Controller
The fuzzy adaptive inertia weight is used to improve the
performance of PSO. The simulation results prove the validity of the
algorithm for its application in voltage and frequency control. The population
size and number of generations are maintained as 50 for LFC and AVR. The
220
Minimum Current Best Performance (CBPEmin) and Maximum Current Best
Performance (CBPEmax) values are assumed as 0.1 and 1 respectively. The
cognitive and social coefficients are selected as 1.2 and 1 respectively. The
proposed FPSO algorithm for auto tuning of PID gain generates the optimum
values of Kp, Ki and Kd. The LFC and AVR models with optimum gain
values are simulated for different regulations and loads. The time taken for
the computation of the PID gains using this algorithm is 10.2 seconds for
change in load of 0.1 p.u. The computational burden is reduced on application
of this algorithm and it is true for different operating conditions of the plant as
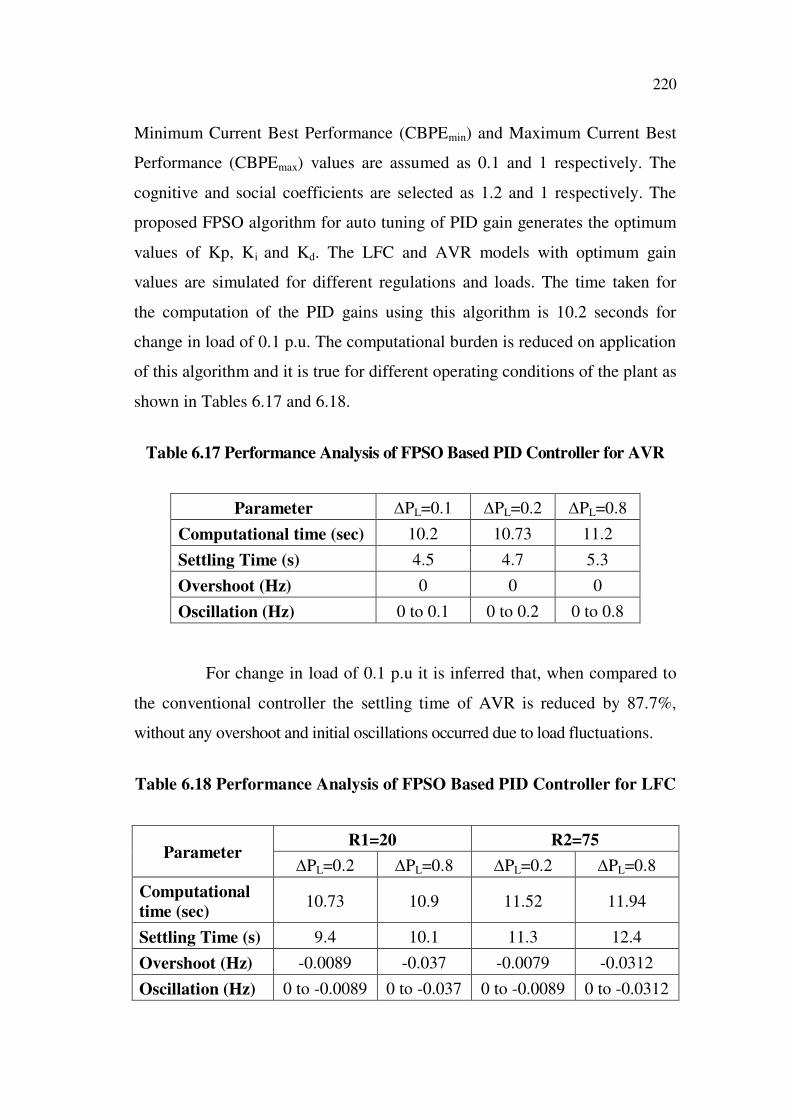
shown in Tables 6.17 and 6.18.
Table 6.17 Performance Analysis of FPSO Based PID Controller for AVR
Parameter PL=0.1 PL=0.2 PL=0.8
Computational time (sec) 10.2 10.73 11.2
Settling Time (s) 4.5 4.7 5.3
Overshoot (Hz) 0 0 0
Oscillation (Hz) 0 to 0.1 0 to 0.2 0 to 0.8
For change in load of 0.1 p.u it is inferred that, when compared to
the conventional controller the settling time of AVR is reduced by 87.7%,
without any overshoot and initial oscillations occurred due to load fluctuations.
Table 6.18 Performance Analysis of FPSO Based PID Controller for LFC
R1=20 R2=75Parameter
PL=0.2 PL=0.8 PL=0.2 PL=0.8
Computational
time (sec)10.73 10.9 11.52 11.94
Settling Time (s) 9.4 10.1 11.3 12.4
Overshoot (Hz) -0.0089 -0.037 -0.0079 -0.0312
Oscillation (Hz) 0 to -0.0089 0 to -0.037 0 to -0.0089 0 to -0.0312
221
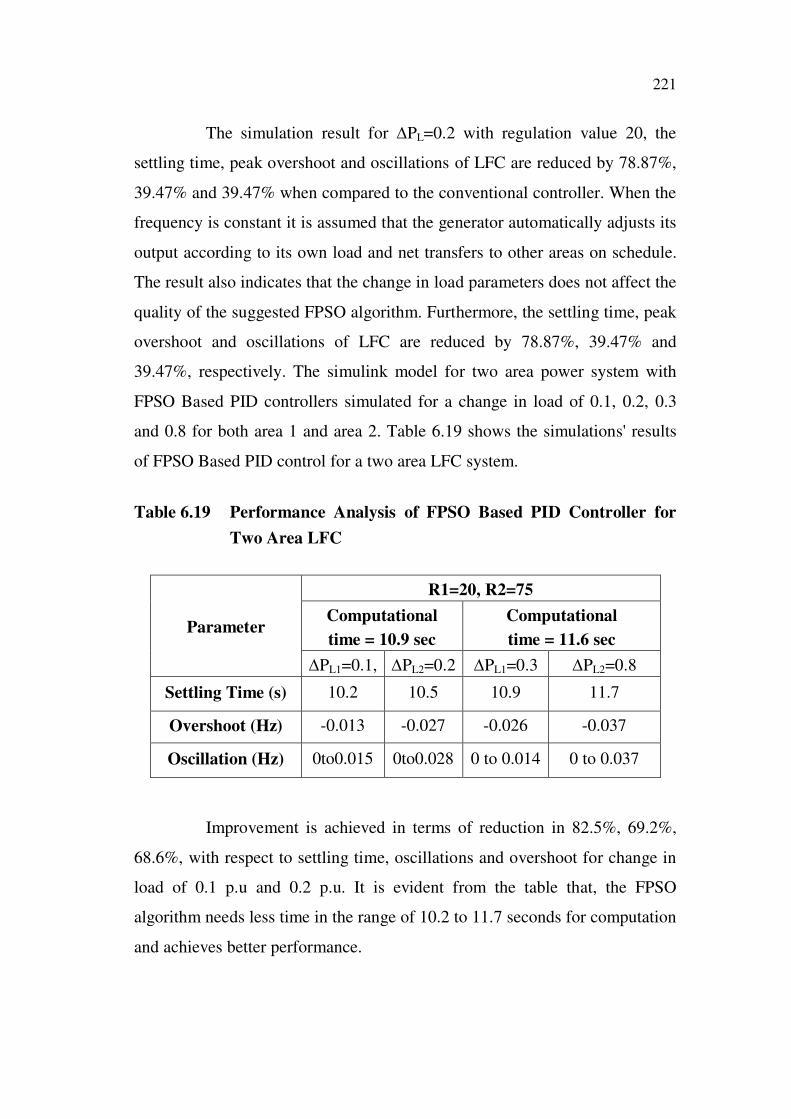
The simulation result for PL=0.2 with regulation value 20, the
settling time, peak overshoot and oscillations of LFC are reduced by 78.87%,
39.47% and 39.47% when compared to the conventional controller. When the
frequency is constant it is assumed that the generator automatically adjusts its
output according to its own load and net transfers to other areas on schedule.
The result also indicates that the change in load parameters does not affect the
quality of the suggested FPSO algorithm. Furthermore, the settling time, peak
overshoot and oscillations of LFC are reduced by 78.87%, 39.47% and
39.47%, respectively. The simulink model for two area power system with
FPSO Based PID controllers simulated for a change in load of 0.1, 0.2, 0.3
and 0.8 for both area 1 and area 2. Table 6.19 shows the simulations' results
of FPSO Based PID control for a two area LFC system.
Table 6.19 Performance Analysis of FPSO Based PID Controller for
Two Area LFC
R1=20, R2=75
Computational
time = 10.9 sec
Computational
time = 11.6 secParameter
PL1=0.1, PL2=0.2 PL1=0.3 PL2=0.8
Settling Time (s) 10.2 10.5 10.9 11.7
Overshoot (Hz) -0.013 -0.027 -0.026 -0.037
Oscillation (Hz) 0to0.015 0to0.028 0 to 0.014 0 to 0.037
Improvement is achieved in terms of reduction in 82.5%, 69.2%,
68.6%, with respect to settling time, oscillations and overshoot for change in
load of 0.1 p.u and 0.2 p.u. It is evident from the table that, the FPSO
algorithm needs less time in the range of 10.2 to 11.7 seconds for computation
and achieves better performance.
222
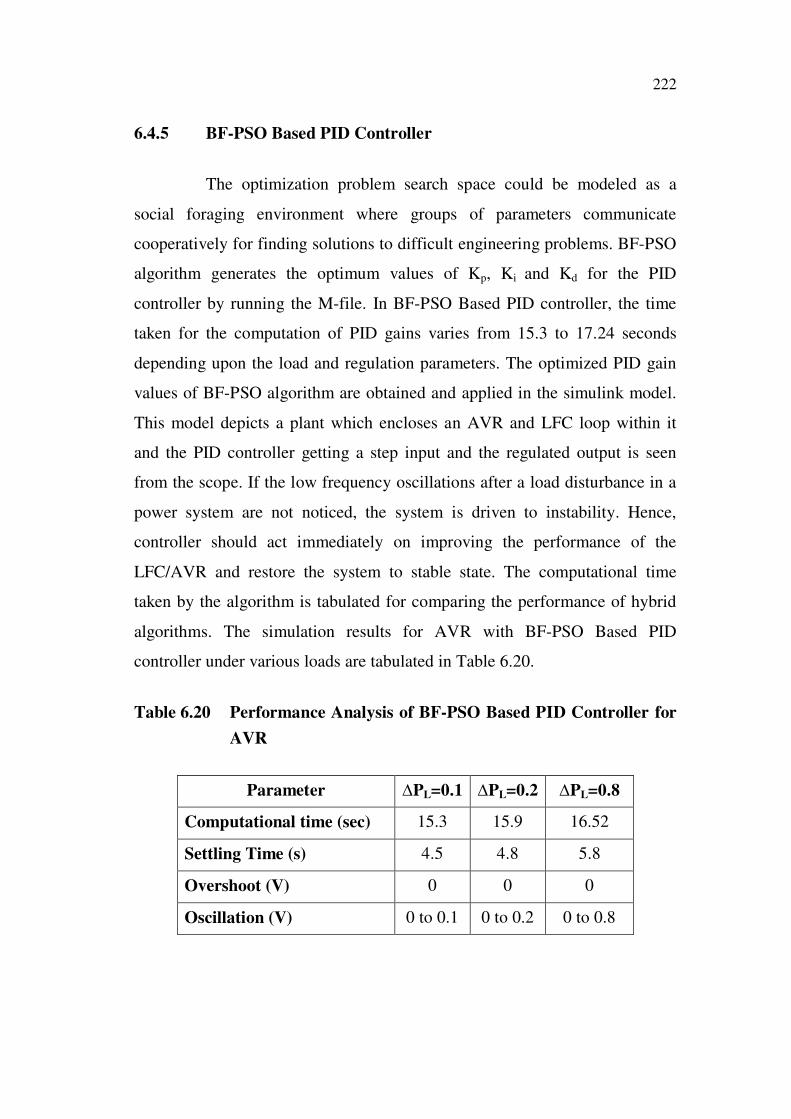
6.4.5 BF-PSO Based PID Controller
The optimization problem search space could be modeled as a
social foraging environment where groups of parameters communicate
cooperatively for finding solutions to difficult engineering problems. BF-PSO
algorithm generates the optimum values of Kp, Ki and Kd for the PID
controller by running the M-file. In BF-PSO Based PID controller, the time
taken for the computation of PID gains varies from 15.3 to 17.24 seconds
depending upon the load and regulation parameters. The optimized PID gain
values of BF-PSO algorithm are obtained and applied in the simulink model.
This model depicts a plant which encloses an AVR and LFC loop within it
and the PID controller getting a step input and the regulated output is seen
from the scope. If the low frequency oscillations after a load disturbance in a
power system are not noticed, the system is driven to instability. Hence,
controller should act immediately on improving the performance of the
LFC/AVR and restore the system to stable state. The computational time
taken by the algorithm is tabulated for comparing the performance of hybrid
algorithms. The simulation results for AVR with BF-PSO Based PID
controller under various loads are tabulated in Table 6.20.
Table 6.20 Performance Analysis of BF-PSO Based PID Controller for
AVR
Parameter PL=0.1 PL=0.2 PL=0.8
Computational time (sec) 15.3 15.9 16.52
Settling Time (s) 4.5 4.8 5.8
Overshoot (V) 0 0 0
Oscillation (V) 0 to 0.1 0 to 0.2 0 to 0.8
223
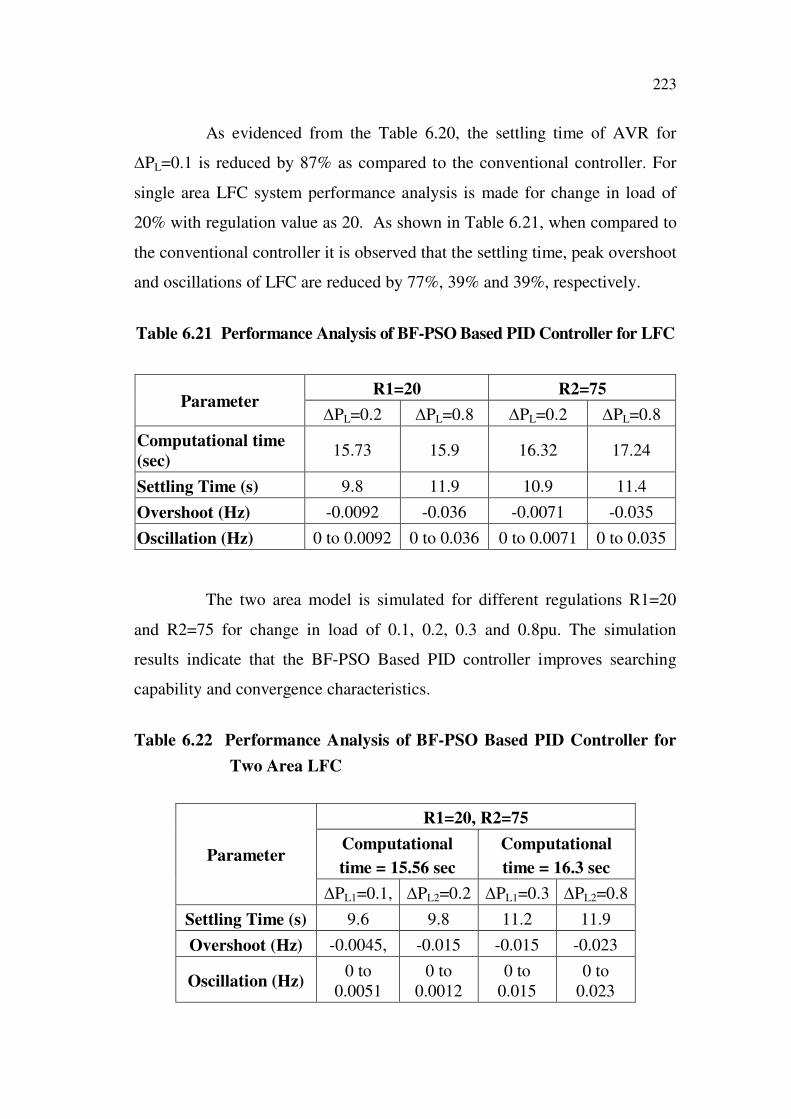
As evidenced from the Table 6.20, the settling time of AVR for
PL=0.1 is reduced by 87% as compared to the conventional controller. For
single area LFC system performance analysis is made for change in load of
20% with regulation value as 20. As shown in Table 6.21, when compared to
the conventional controller it is observed that the settling time, peak overshoot
and oscillations of LFC are reduced by 77%, 39% and 39%, respectively.
Table 6.21 Performance Analysis of BF-PSO Based PID Controller for LFC
R1=20 R2=75Parameter
PL=0.2 PL=0.8 PL=0.2 PL=0.8
Computational time
(sec)15.73 15.9 16.32 17.24
Settling Time (s) 9.8 11.9 10.9 11.4
Overshoot (Hz) -0.0092 -0.036 -0.0071 -0.035
Oscillation (Hz) 0 to 0.0092 0 to 0.036 0 to 0.0071 0 to 0.035
The two area model is simulated for different regulations R1=20
and R2=75 for change in load of 0.1, 0.2, 0.3 and 0.8pu. The simulation
results indicate that the BF-PSO Based PID controller improves searching
capability and convergence characteristics.
Table 6.22 Performance Analysis of BF-PSO Based PID Controller for
Two Area LFC
R1=20, R2=75
Computational
time = 15.56 sec
Computational
time = 16.3 secParameter
PL1=0.1, PL2=0.2 PL1=0.3 PL2=0.8
Settling Time (s) 9.6 9.8 11.2 11.9
Overshoot (Hz) -0.0045, -0.015 -0.015 -0.023
Oscillation (Hz)0 to
0.0051
0 to
0.0012
0 to
0.015
0 to
0.023
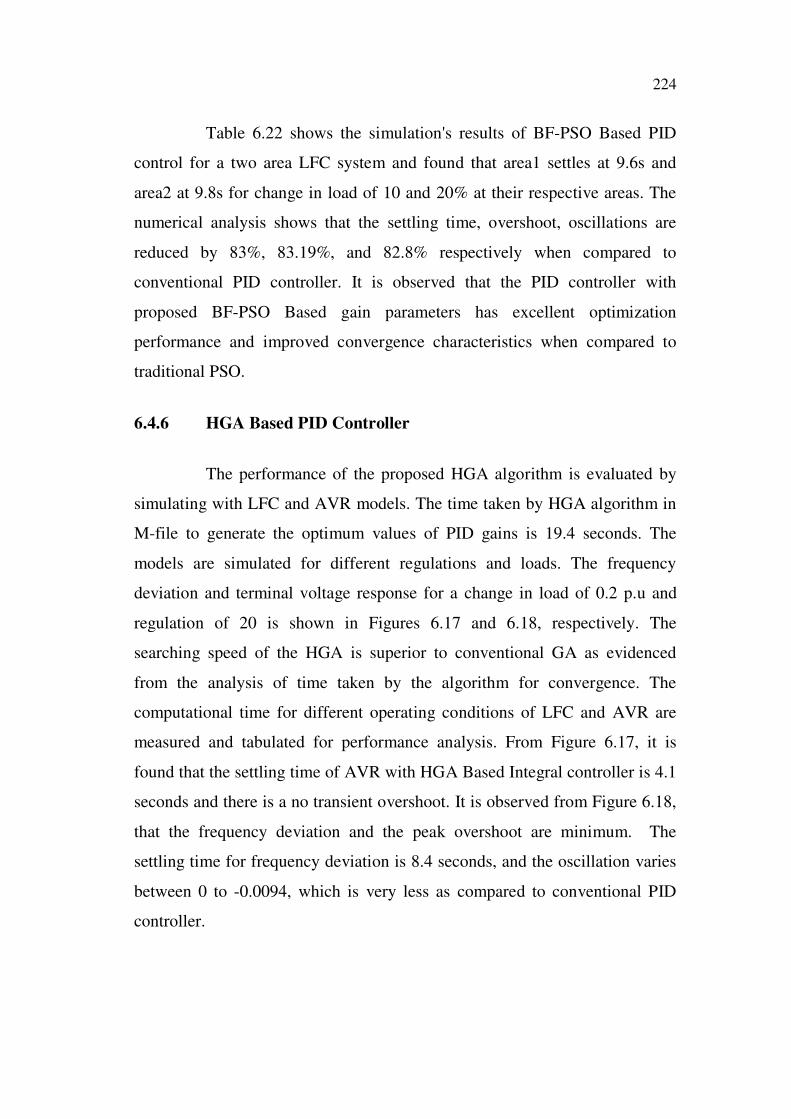
224
Table 6.22 shows the simulation's results of BF-PSO Based PID
control for a two area LFC system and found that area1 settles at 9.6s and
area2 at 9.8s for change in load of 10 and 20% at their respective areas. The
numerical analysis shows that the settling time, overshoot, oscillations are
reduced by 83%, 83.19%, and 82.8% respectively when compared to
conventional PID controller. It is observed that the PID controller with
proposed BF-PSO Based gain parameters has excellent optimization
performance and improved convergence characteristics when compared to
traditional PSO.
6.4.6 HGA Based PID Controller
The performance of the proposed HGA algorithm is evaluated by
simulating with LFC and AVR models. The time taken by HGA algorithm in
M-file to generate the optimum values of PID gains is 19.4 seconds. The
models are simulated for different regulations and loads. The frequency
deviation and terminal voltage response for a change in load of 0.2 p.u and
regulation of 20 is shown in Figures 6.17 and 6.18, respectively. The
searching speed of the HGA is superior to conventional GA as evidenced
from the analysis of time taken by the algorithm for convergence. The
computational time for different operating conditions of LFC and AVR are
measured and tabulated for performance analysis. From Figure 6.17, it is
found that the settling time of AVR with HGA Based Integral controller is 4.1
seconds and there is a no transient overshoot. It is observed from Figure 6.18,
that the frequency deviation and the peak overshoot are minimum. The
settling time for frequency deviation is 8.4 seconds, and the oscillation varies
between 0 to -0.0094, which is very less as compared to conventional PID
controller.
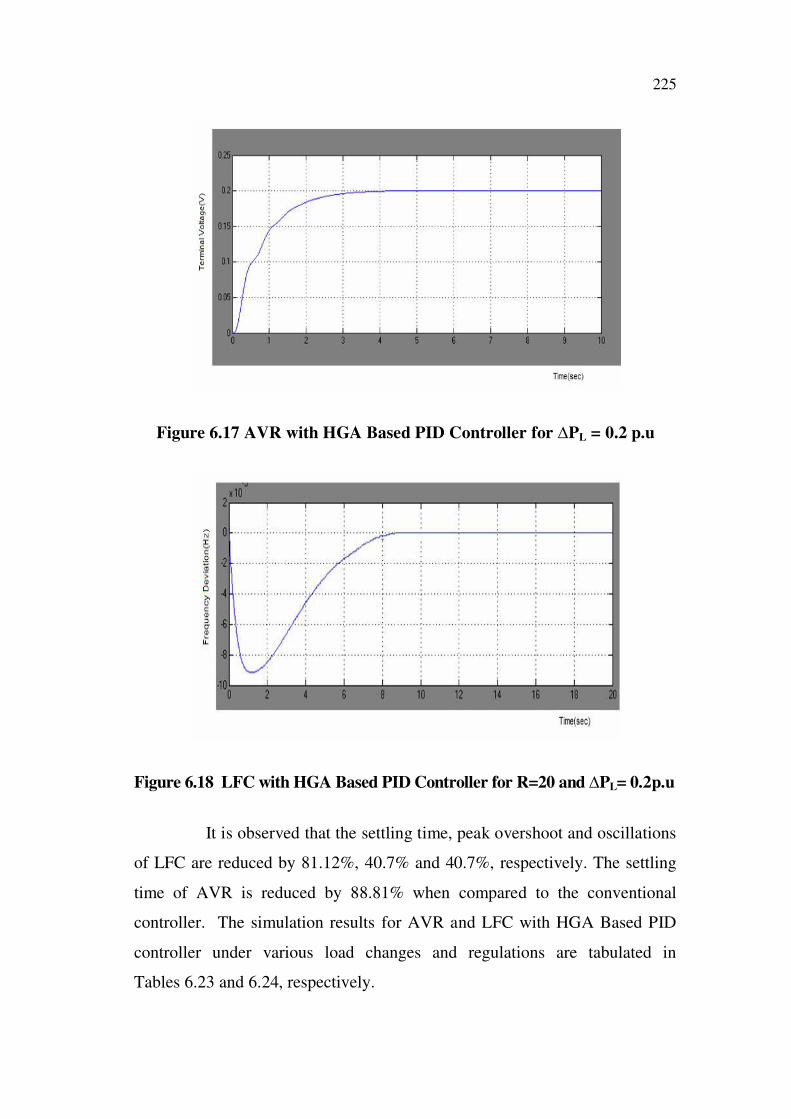
225
Figure 6.17 AVR with HGA Based PID Controller for PL = 0.2 p.u
Figure 6.18 LFC with HGA Based PID Controller for R=20 and PL= 0.2p.u
It is observed that the settling time, peak overshoot and oscillations
of LFC are reduced by 81.12%, 40.7% and 40.7%, respectively. The settling
time of AVR is reduced by 88.81% when compared to the conventional
controller. The simulation results for AVR and LFC with HGA Based PID
controller under various load changes and regulations are tabulated in
Tables 6.23 and 6.24, respectively.
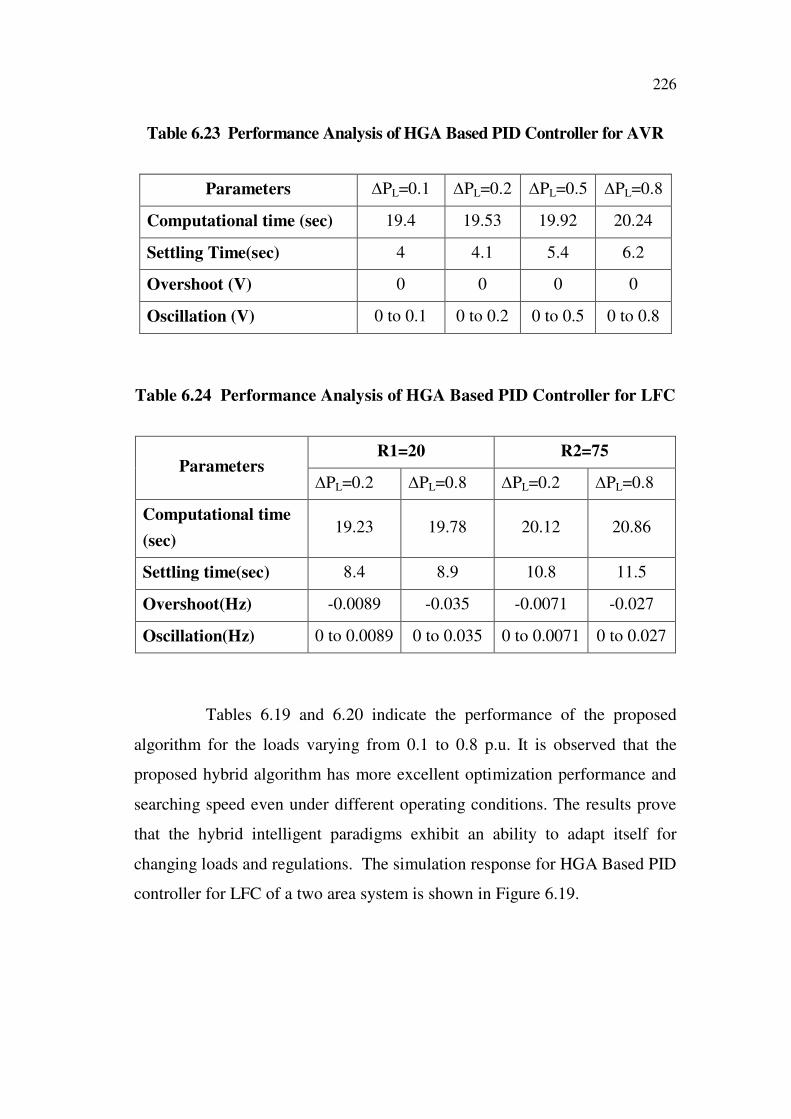
226
Table 6.23 Performance Analysis of HGA Based PID Controller for AVR
Parameters PL=0.1 PL=0.2 PL=0.5 PL=0.8
Computational time (sec) 19.4 19.53 19.92 20.24
Settling Time(sec) 4 4.1 5.4 6.2
Overshoot (V) 0 0 0 0
Oscillation (V) 0 to 0.1 0 to 0.2 0 to 0.5 0 to 0.8
Table 6.24 Performance Analysis of HGA Based PID Controller for LFC
R1=20 R2=75Parameters
PL=0.2 PL=0.8 PL=0.2 PL=0.8
Computational time
(sec)19.23 19.78 20.12 20.86
Settling time(sec) 8.4 8.9 10.8 11.5
Overshoot(Hz) -0.0089 -0.035 -0.0071 -0.027
Oscillation(Hz) 0 to 0.0089 0 to 0.035 0 to 0.0071 0 to 0.027
Tables 6.19 and 6.20 indicate the performance of the proposed
algorithm for the loads varying from 0.1 to 0.8 p.u. It is observed that the
proposed hybrid algorithm has more excellent optimization performance and
searching speed even under different operating conditions. The results prove
that the hybrid intelligent paradigms exhibit an ability to adapt itself for
changing loads and regulations. The simulation response for HGA Based PID
controller for LFC of a two area system is shown in Figure 6.19.
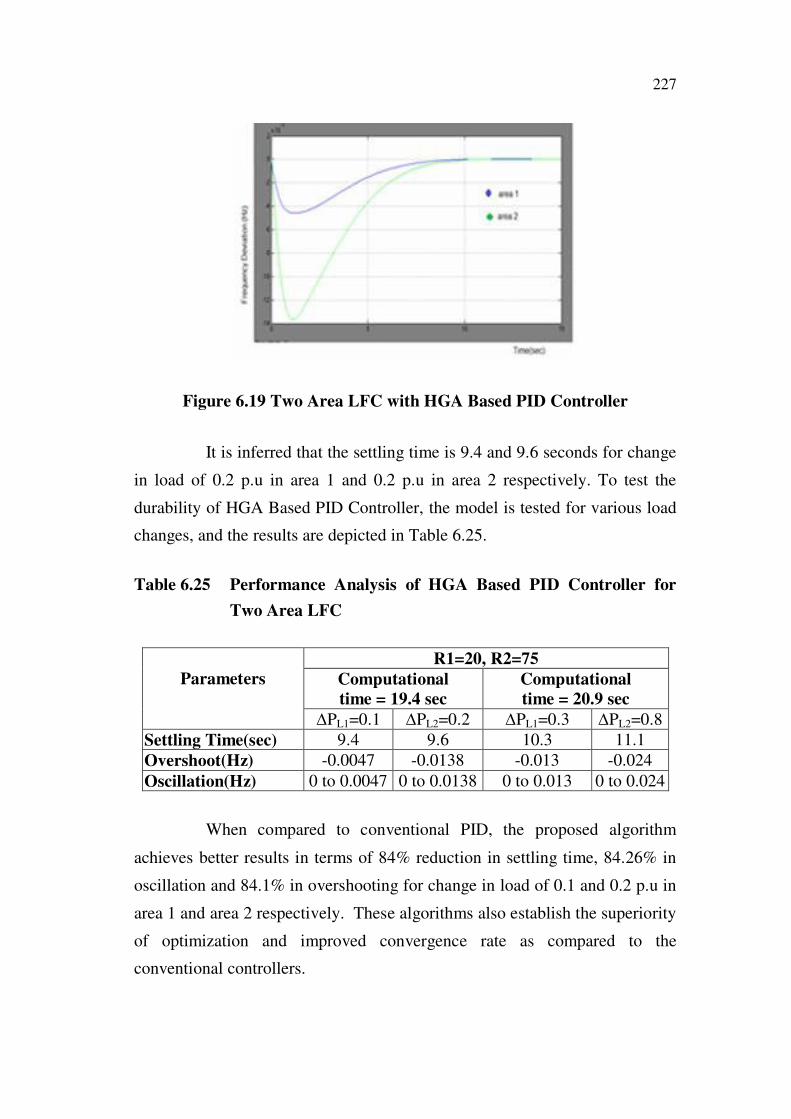
227
Figure 6.19 Two Area LFC with HGA Based PID Controller
It is inferred that the settling time is 9.4 and 9.6 seconds for change
in load of 0.2 p.u in area 1 and 0.2 p.u in area 2 respectively. To test the
durability of HGA Based PID Controller, the model is tested for various load
changes, and the results are depicted in Table 6.25.
Table 6.25 Performance Analysis of HGA Based PID Controller for
Two Area LFC
R1=20, R2=75
Computational
time = 19.4 sec
Computational
time = 20.9 sec
Parameters
PL1=0.1 PL2=0.2 PL1=0.3 PL2=0.8
Settling Time(sec) 9.4 9.6 10.3 11.1
Overshoot(Hz) -0.0047 -0.0138 -0.013 -0.024
Oscillation(Hz) 0 to 0.0047 0 to 0.0138 0 to 0.013 0 to 0.024
When compared to conventional PID, the proposed algorithm
achieves better results in terms of 84% reduction in settling time, 84.26% in
oscillation and 84.1% in overshooting for change in load of 0.1 and 0.2 p.u in
area 1 and area 2 respectively. These algorithms also establish the superiority
of optimization and improved convergence rate as compared to the
conventional controllers.
228
6.5 COMPARATIVE ANALYSIS
When an electrical load change occurs, the turbine-generator rotor
accelerates or decelerates, and frequency undergoes a transient disturbance.
The controller should not allow transient oscillations or overshoot, which in-
turn trips the under-frequency relay connected in the system. Oscillations,
settling time and overshoot are interrelated changes in reducing one parameter
will affect the other parameter. Hence, it is important that the designed
controller must be efficient in selecting the optimum gains in order to achieve
better results. Owing to the randomness of the heuristic algorithms, their
performance cannot be judged by a single result; that is to say the models are
simulated for different load changes and regulations to validate the efficiency
of the proposed algorithms (Liang Qin et al 2006). The value of R determines
the slope of the governor characteristics, and it determines the change on the
output for a given change in frequency. In practice ‘R’ is set on each generating
unit so that change in load on a system will be compensated by generated
output. The speed governor system should be operated within the restricted
control range of feedback gains due to the system instability. So, higher value
of load PL for a small ‘R’ value will introduce oscillations into the system.
Hence PL and R are selected as shown in Tables 6.23 and 6.24 to obtain
optimum results in terms of settling time, overshoot and oscillations. Increasing
the load PL into higher values will experience large overshoot and settling time.
6.5.1 Performance of Single Area System
The performance of the proposed EA Based controllers developed
for AVR of the power generating system for various load changes is given in
Table 6.26 and Table 6.27 to indicate the efficiency of PSO algorithm for
real-time applications and its suitability under varying load conditions. The
computational time required for the algorithm to compute the values of PID
gains is tabulated for performance comparison. The EA provides better
convergence and reveals their superiority with respect to settling time,
oscillations and overshoot when compared to the standard PSO method.
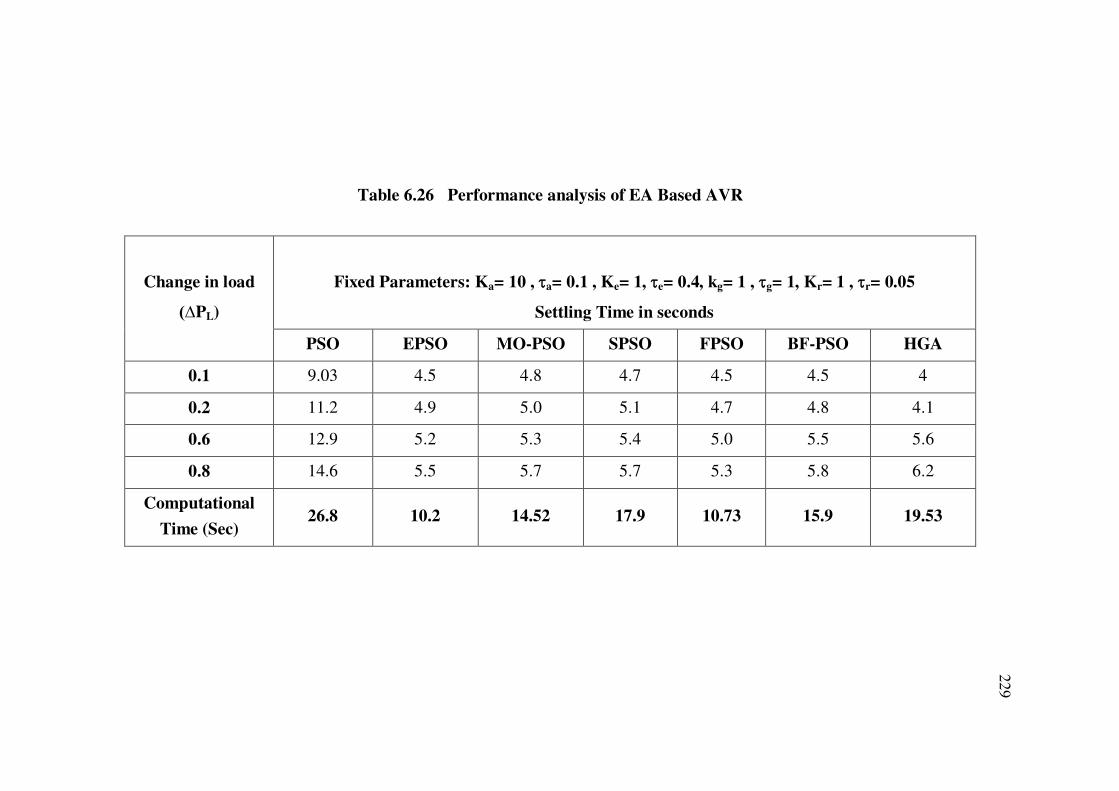
229
Table 6.26 Performance analysis of EA Based AVR
Fixed Parameters: Ka= 10 , a= 0.1 , Ke= 1, e= 0.4, kg= 1 , g= 1, Kr= 1 , r= 0.05
Settling Time in seconds
Change in load
PL)
PSO EPSO MO-PSO SPSO FPSO BF-PSO HGA
0.1 9.03 4.5 4.8 4.7 4.5 4.5 4
0.2 11.2 4.9 5.0 5.1 4.7 4.8 4.1
0.6 12.9 5.2 5.3 5.4 5.0 5.5 5.6
0.8 14.6 5.5 5.7 5.7 5.3 5.8 6.2
Computational
Time (Sec)26.8 10.2 14.52 17.9 10.73 15.9 19.53
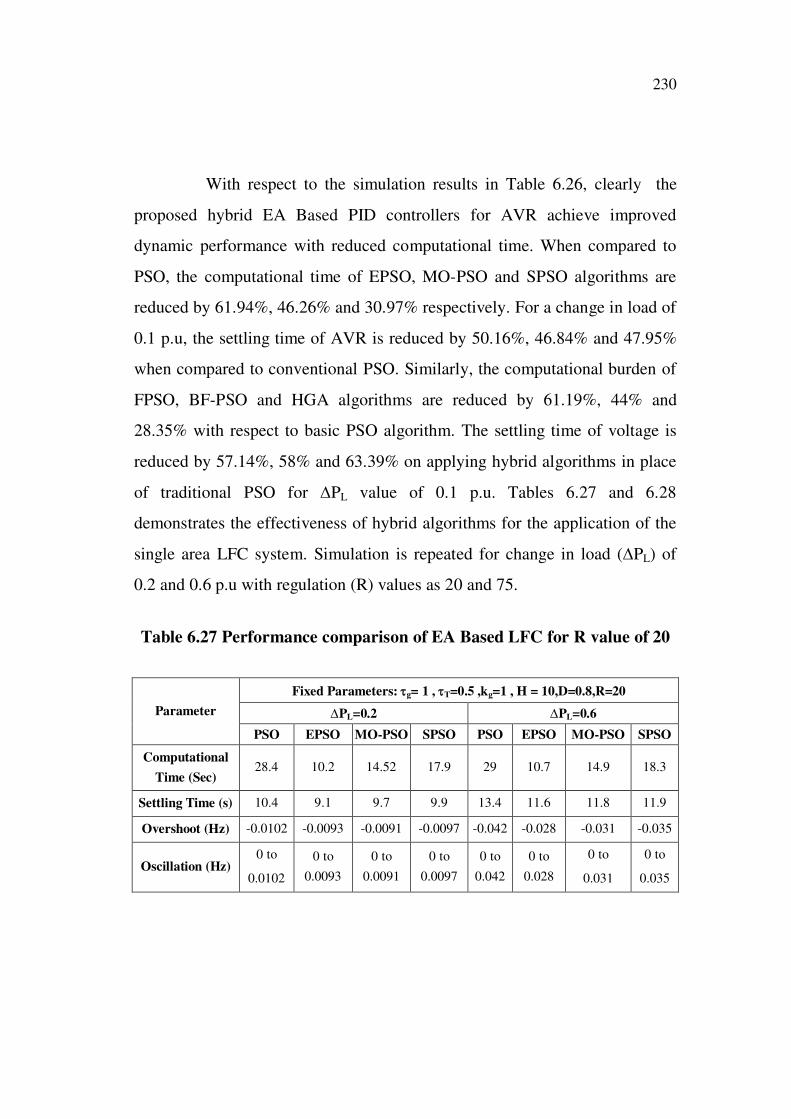
230
With respect to the simulation results in Table 6.26, clearly the
proposed hybrid EA Based PID controllers for AVR achieve improved
dynamic performance with reduced computational time. When compared to
PSO, the computational time of EPSO, MO-PSO and SPSO algorithms are
reduced by 61.94%, 46.26% and 30.97% respectively. For a change in load of
0.1 p.u, the settling time of AVR is reduced by 50.16%, 46.84% and 47.95%
when compared to conventional PSO. Similarly, the computational burden of
FPSO, BF-PSO and HGA algorithms are reduced by 61.19%, 44% and
28.35% with respect to basic PSO algorithm. The settling time of voltage is
reduced by 57.14%, 58% and 63.39% on applying hybrid algorithms in place
of traditional PSO for PL value of 0.1 p.u. Tables 6.27 and 6.28
demonstrates the effectiveness of hybrid algorithms for the application of the
single area LFC system. Simulation is repeated for change in load ( PL) of
0.2 and 0.6 p.u with regulation (R) values as 20 and 75.
Table 6.27 Performance comparison of EA Based LFC for R value of 20
Fixed Parameters: g= 1 , T=0.5 ,kg=1 , H = 10,D=0.8,R=20
PL=0.2 PL=0.6Parameter
PSO EPSO MO-PSO SPSO PSO EPSO MO-PSO SPSO
Computational
Time (Sec)28.4 10.2 14.52 17.9 29 10.7 14.9 18.3
Settling Time (s) 10.4 9.1 9.7 9.9 13.4 11.6 11.8 11.9
Overshoot (Hz) -0.0102 -0.0093 -0.0091 -0.0097 -0.042 -0.028 -0.031 -0.035
Oscillation (Hz)0 to
0.0102
0 to
0.0093
0 to
0.0091
0 to
0.0097
0 to
0.042
0 to
0.028
0 to
0.031
0 to
0.035
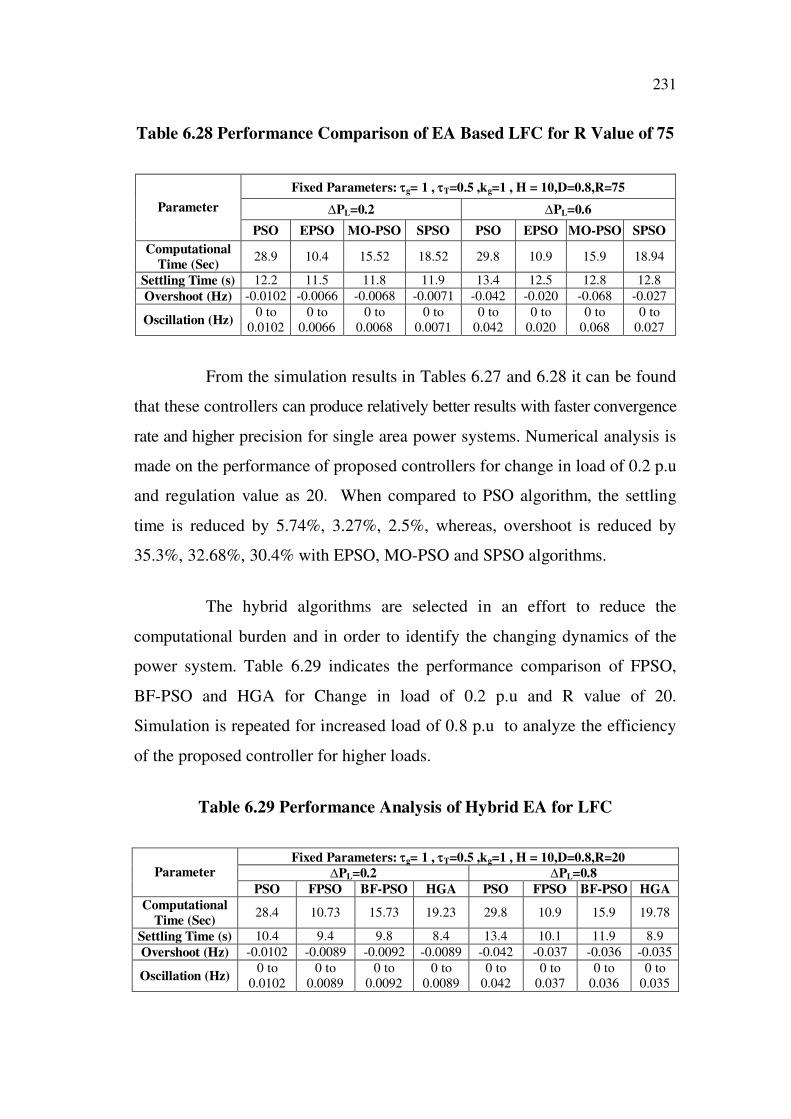
231
Table 6.28 Performance Comparison of EA Based LFC for R Value of 75
Fixed Parameters: g= 1 , T=0.5 ,kg=1 , H = 10,D=0.8,R=75
PL=0.2 PL=0.6Parameter
PSO EPSO MO-PSO SPSO PSO EPSO MO-PSO SPSO
Computational
Time (Sec)28.9 10.4 15.52 18.52 29.8 10.9 15.9 18.94
Settling Time (s) 12.2 11.5 11.8 11.9 13.4 12.5 12.8 12.8
Overshoot (Hz) -0.0102 -0.0066 -0.0068 -0.0071 -0.042 -0.020 -0.068 -0.027
Oscillation (Hz)0 to
0.0102
0 to
0.0066
0 to
0.0068
0 to
0.0071
0 to
0.042
0 to
0.020
0 to
0.068
0 to
0.027
From the simulation results in Tables 6.27 and 6.28 it can be found
that these controllers can produce relatively better results with faster convergence
rate and higher precision for single area power systems. Numerical analysis is
made on the performance of proposed controllers for change in load of 0.2 p.u
and regulation value as 20. When compared to PSO algorithm, the settling
time is reduced by 5.74%, 3.27%, 2.5%, whereas, overshoot is reduced by
35.3%, 32.68%, 30.4% with EPSO, MO-PSO and SPSO algorithms.
The hybrid algorithms are selected in an effort to reduce the
computational burden and in order to identify the changing dynamics of the
power system. Table 6.29 indicates the performance comparison of FPSO,
BF-PSO and HGA for Change in load of 0.2 p.u and R value of 20.
Simulation is repeated for increased load of 0.8 p.u to analyze the efficiency
of the proposed controller for higher loads.
Table 6.29 Performance Analysis of Hybrid EA for LFC
Fixed Parameters: g= 1 , T=0.5 ,kg=1 , H = 10,D=0.8,R=20
PL=0.2 PL=0.8Parameter
PSO FPSO BF-PSO HGA PSO FPSO BF-PSO HGA
Computational
Time (Sec)28.4 10.73 15.73 19.23 29.8 10.9 15.9 19.78
Settling Time (s) 10.4 9.4 9.8 8.4 13.4 10.1 11.9 8.9
Overshoot (Hz) -0.0102 -0.0089 -0.0092 -0.0089 -0.042 -0.037 -0.036 -0.035
Oscillation (Hz)0 to
0.0102
0 to
0.0089
0 to
0.0092
0 to
0.0089
0 to
0.042
0 to
0.037
0 to
0.036
0 to
0.035
232
The computational time taken by FPSO, BF-PSO and HGA
algorithms are reduced by 62.21%, 44.61%, 32.2% when compared to basic
PSO algorithm. Performance of the proposed hybrid EA is analyzed for 20%
change in load perturbations and for regulation R=20. When compared to
conventional PSO algorithm the settling time is reduced by 11.5%, 5.8%,
19.23%, with the application of proposed FPSO, BF-PSO and HGA
algorithms respectively. The overshoot is reduced by 9.8%, 9.8%, 12.7%
when compared to conventional PSO algorithm.
6.5.2 Performance of Two Area System
Two area power system is used as a test system to demonstrate the
effectiveness of the proposed methods under various operating conditions and
area load demand. By applying small and large load disturbances, the
algorithm is tested for its validity for reducing the transient oscillations. The
low frequency oscillations if not damped immediately after a sudden load in a
power system, will drive the system to instability. Hence the secondary
controller employed in LFC has to manage efficiently for the increase in load
and act dynamically to reduce the frequency of oscillations. Table 6.30 shows
the simulation results of a two area system for a change in load of PL1=0.1
and PL2=0.2 for R values of 20 and 75. Here the two control areas are
interconnected, hence power flow between the areas and tie line frequency is
together responsible for the load frequency control. The results in Table 6.31
validate the performance of the proposed algorithm for increased loading
conditions.
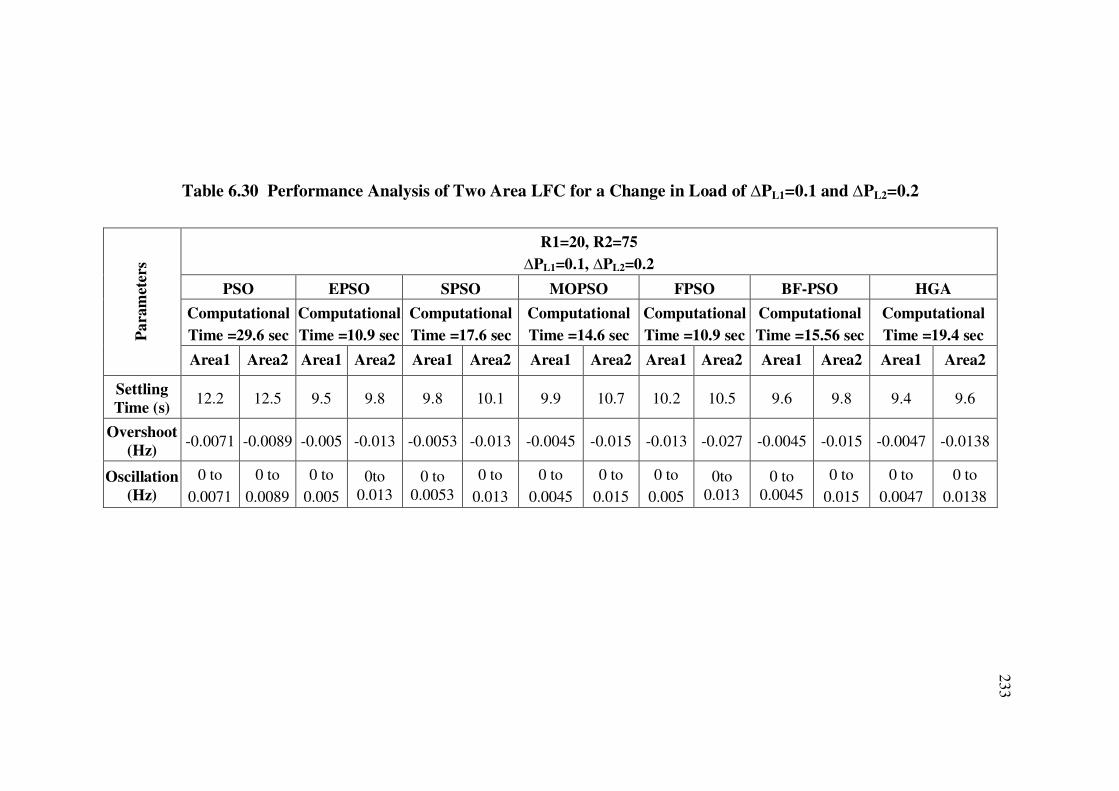
233
Table 6.30 Performance Analysis of Two Area LFC for a Change in Load of PL1=0.1 and PL2=0.2
R1=20, R2=75
PL1=0.1, PL2=0.2
PSO EPSO SPSO MOPSO FPSO BF-PSO HGA
Computational
Time =29.6 sec
Computational
Time =10.9 sec
Computational
Time =17.6 sec
Computational
Time =14.6 sec
Computational
Time =10.9 sec
Computational
Time =15.56 sec
Computational
Time =19.4 secPa
ram
eter
s
Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2
Settling
Time (s)12.2 12.5 9.5 9.8 9.8 10.1 9.9 10.7 10.2 10.5 9.6 9.8 9.4 9.6
Overshoot
(Hz)-0.0071 -0.0089 -0.005 -0.013 -0.0053 -0.013 -0.0045 -0.015 -0.013 -0.027 -0.0045 -0.015 -0.0047 -0.0138
Oscillation
(Hz)
0 to
0.0071
0 to
0.0089
0 to
0.005
0to
0.013
0 to
0.0053
0 to
0.013
0 to
0.0045
0 to
0.015
0 to
0.005
0to
0.013
0 to
0.0045
0 to
0.015
0 to
0.0047
0 to
0.0138
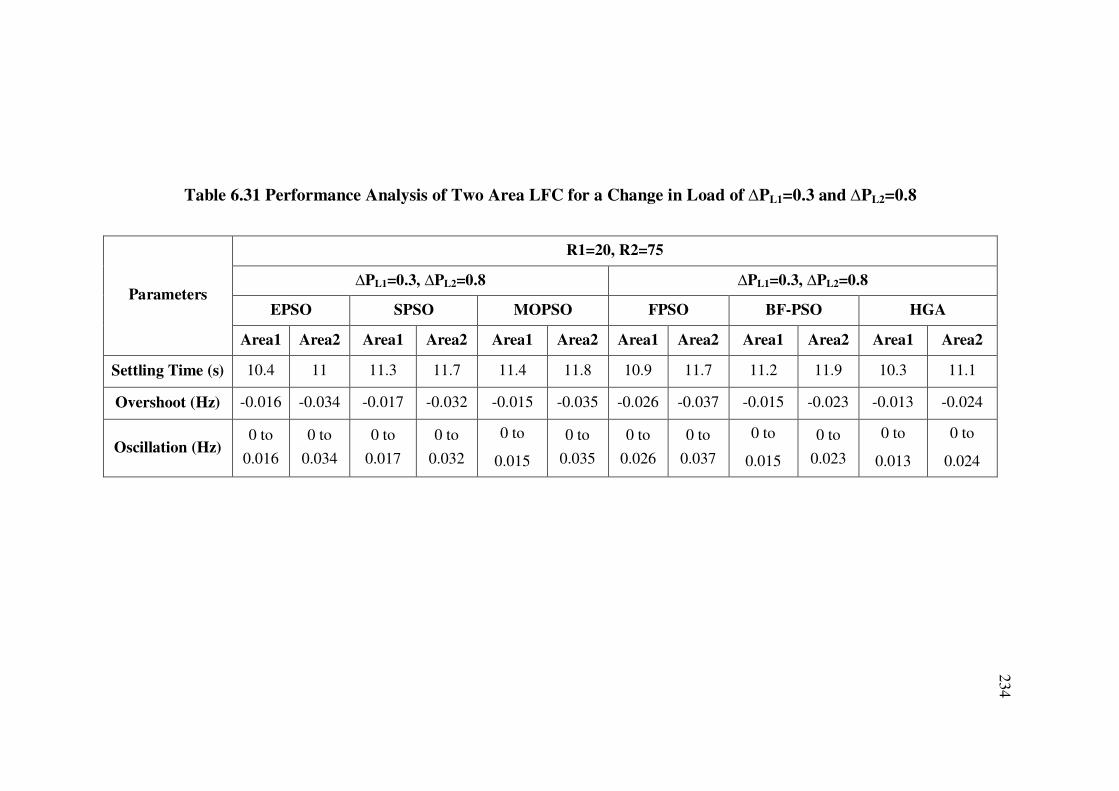
234
Table 6.31 Performance Analysis of Two Area LFC for a Change in Load of PL1=0.3 and PL2=0.8
R1=20, R2=75
PL1=0.3, PL2=0.8 PL1=0.3, PL2=0.8
EPSO SPSO MOPSO FPSO BF-PSO HGAParameters
Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2 Area1 Area2
Settling Time (s) 10.4 11 11.3 11.7 11.4 11.8 10.9 11.7 11.2 11.9 10.3 11.1
Overshoot (Hz) -0.016 -0.034 -0.017 -0.032 -0.015 -0.035 -0.026 -0.037 -0.015 -0.023 -0.013 -0.024
Oscillation (Hz)0 to
0.016
0 to
0.034
0 to
0.017
0 to
0.032
0 to
0.015
0 to
0.035
0 to
0.026
0 to
0.037
0 to
0.015
0 to
0.023
0 to
0.013
0 to
0.024
235
From the simulation results, it reveals that the hybrid EA method is
a potential alternative to be implemented as a useful tool in solving power
quality problems. As shown in Table 6.30, the settling time is reduced by
21%, 13.28%, 13.3%, 14.84%, 12.5%, 19.50% with application of EPSO,
SPSO, MO-PSO, FPSO, BF-PSO, and HGA algorithms respectively. In terms
of overshoot and oscillations the proposed hybrid algorithms attain reduction
of 15.15%, 18.2%, 12.13%, 21.2%, 30% and 27.3% in comparison with PSO
algorithm. The investigation is carried out for increased load of 0.3p.u in
area1 and 0.8p.u in area2 and the results in Table 6.31 explore the possibilities
of proposed algorithms for different operating conditions. When a change in
load is small, the overshoot and the settling time in the response is reduced.
Therefore, we can choose appropriate gains Based on estimation to overshoot,
oscillations and settling time.
6.6 COMPUTATIONAL EFFICIENCY OF EVOLUTIONARY
ALGORITHMS
The trend in present research and development of PID controller is
to focus on the fast and reliable methods in order obtain the best performance
of existing PID control. Hence intelligent optimization techniques are
developed to decrease the computational time with increased reliability and
efficiency of the controller. The inclusion of hybrid evolutionary algorithms
in PID gain tuning helps to automate the entire design process to a useful
degree. The comparison of average computation time or time complexity of
different hybrid EAs for combinatorial optimization of PID gains for AVR
and LFC is shown in Figure 6.20.
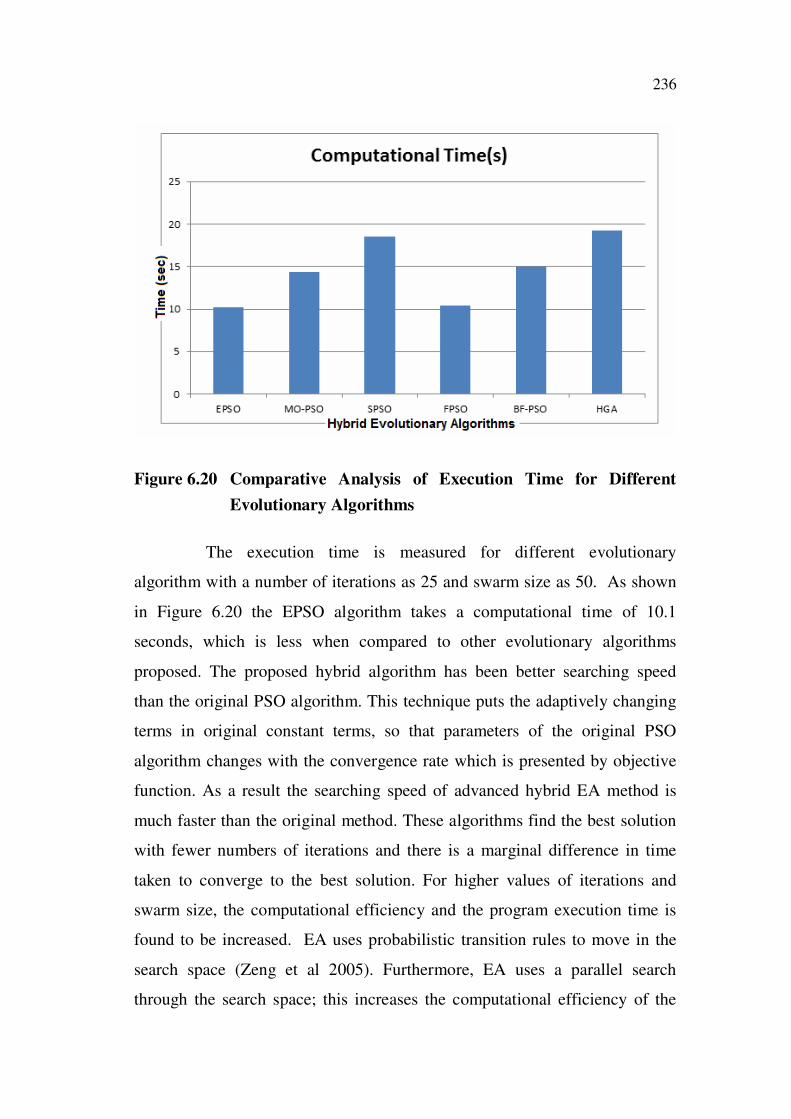
236
Figure 6.20 Comparative Analysis of Execution Time for Different
Evolutionary Algorithms
The execution time is measured for different evolutionary
algorithm with a number of iterations as 25 and swarm size as 50. As shown
in Figure 6.20 the EPSO algorithm takes a computational time of 10.1
seconds, which is less when compared to other evolutionary algorithms
proposed. The proposed hybrid algorithm has been better searching speed
than the original PSO algorithm. This technique puts the adaptively changing
terms in original constant terms, so that parameters of the original PSO
algorithm changes with the convergence rate which is presented by objective
function. As a result the searching speed of advanced hybrid EA method is
much faster than the original method. These algorithms find the best solution
with fewer numbers of iterations and there is a marginal difference in time
taken to converge to the best solution. For higher values of iterations and
swarm size, the computational efficiency and the program execution time is
found to be increased. EA uses probabilistic transition rules to move in the
search space (Zeng et al 2005). Furthermore, EA uses a parallel search
through the search space; this increases the computational efficiency of the
237
algorithms. The no-free-lunch (NFL) theorem states that there cannot exist
any algorithm for solving all problems that are on average superior to any
other algorithm. This theorem motivates research in new optimization
algorithms, especially EA. Since, the basic PSO method does not perform the
selection and crossover operation in the evolutionary process, it can save
computation time compared with the GA method, thus proving that the EA
Based PID controller is more superior. The EA search starts from a diverse set
of initial points, which allows parallel search of a large area of the search
space.
6.7 SUMMARY
A novel hybrid EA is designed for determining the PID controller
parameters for LFC and AVR of the power generating system. The hybrid
algorithms generate better solutions by improving the global and local search
ability of the PSO and overcome the disadvantages of the PSO. In order to
identify the changing dynamics of the power system and to provide necessary
control actions, high computational power is needed. These algorithms are
selected in an effort to reduce the computational burden and to improve the
computational efficiency of PSO.
The LFC and AVR models with EPSO, MO-PSO, SPSO, HGA,
BF-PSO, and FPSO Based controllers are simulated for different operating
conditions for performance comparison. The experimental results indicate that
the proposed hybrid EA Based controllers can improve the computational
efficiency and produce more satisfactory output. Compared to conventional
fixed gain controllers, the suggested algorithms perform well under all
regions of operations with increased performance characteristics.
The proposed algorithm has the potential stability in overcoming
the possibility of entrapment in local minimum solutions. Hence, the
238
application of hybrid algorithms improves the dynamic response of voltage
and frequency responses of the autonomous and interconnected power
generating system. The combined and synergic use of information yields a
promising tool in solving power system control problems that require
optimization of more parameters. From the simulation results of two areas
interconnected system, it reveals that these controllers can generate good
quality solutions at higher precision.
In future, the work can be extended by simulating the algorithm for
different types of turbine models and with different system parameters. The
applications of hybrid EA Based controllers can be extended for multi-area
power system, including non-linear parameters. The intelligent hybrid
techniques like, GA-SA, Neuro-fuzzy-GA, Neuro-fuzzy-PSO, Neuro-fuzzy-
ACO can be implemented to enhance the performance of the generating
system.





























