-
Dr. B Dayal
-
Dr. B Dayal
-
STEADY STATE CORNERING
Cornering behaviour equated with handling.handling meant to
imply the responsiveness of a vehicle to driver input, or the ease
of control. As such, handling is an overall measure of the vehgicle
driver combination.Driver and vehicle is a closed loop system.Open
loop refers to vehicle response to specific steering inputs, and is
more precisely defined as directional response behaviour.
-
LOW SPEED TURNING
At low speed tyres need not develop lateral forces. Thus they
roll with no slip angle.If the rear wheels have no slip angle, the
center of turn must lie on the projection of the rear
axle.Likewise, the perpendicular from each of the front wheels
should pass through the same point called as center of turn.This is
called as condition of true rolling.The ideal turning angles on the
front wheels can be established by Ackerman Geometry or Ackerman
steering.
-
CONDITION OF TRUE ROLLING
-
Condition of true rollingtrue rolling occurs only when the
direction of motion of the vehicle is perpendicular to the wheel
axis, i.e., the wheel is subjected to forward force. on a circular
path, true rolling condition occurs when the projected axes of
several wheels all moving in different curved path intersect at a
single point called the instantaneous centre. whenever a vehicle
takes a turn, the front wheel must turn in a definite manner both
in relation to eachother and to the axis of the rear wheels so that
the lateral slip may be avoided and true rolling for all the wheels
is obtained. for this all
-
Condition of true rollingthe wheels must always rotate about the
instantaneous centre. since the rear wheels have a common and fixed
axis, it is quite obvious that this common centre o would lie some
where on its extensionfrom the figure
cot = (c + x)/b = c/b + x/b = c/b + cot or cot - cot = c/bwhere,
= angle of inside lock = angle of outside locka = wheel trackb =
wheel base
-
Condition of true rollingC = DISTANCE BETWEEN PIVOT CENTRESD =
LENGTH OF TRACK RODTURNING CIRCLE RADIUSOUTER FRONT WHEEL ROF =
b/SIN + (a c)/2INNER FRONT WHEEL RIF = b/SIN - (a c)/2OUTER REAR
WHEEL ROR = bCot + (a c)/2INNER REAR WHEEL RIR = b Cot (a c)/2
-
TURNING RADIUSTURNING RADIUS OF AN AUTOMOBILE VEHICLE IS THE
RADIUS OF THE ARC DESCRIBED BY THE CENTRE OF THE TRACK MADE BY THE
OUTSIDE FRONT WHEEL OF THE VEHICLE WHEN MAKING ITS SHORTEST TURN.-
Society of Automotive Engineer
ROF =[(-b/SIN )2 + c2 + 2bc/TAN ]1/2+(ac)/2
-
EXAMPLEA motor car has a wheel base of 2.743 m and pivot center
of 1.065 m. the front and rear wheel track is 1.217 m. calculate
the correct angle of outside lock and turning circle radius of the
outer front and inner rear wheel when angle of inside lock is
400.
-
GRAPHICAL SOLUTION DIAGRAM
-
GRAPHICAL SOLUTIONCot = PI/HI = (PG +IG)/HI
Cot = QI/HI = (PG IG)/HITherefore, Cot - Cot = 2IG/HI =
2QG/QK = c/b
-
ANALYTICAL SOLUTION FOR ACKERMANN LINKAGE
-
ANALYTICAL SOLUTION FOR ACKERMANN LINKAGEIf the slight
inclination of the track rod is neglected, the movement of M and N
in the direction parallel to the axle beam PQ can be considered as
the same, say z. let MN represent the correct steering position and
r denotes the cross arm radius.Thensin ( + ) = (y +z)/rAndsin ( ) =
(y z)/r\hencesin ( + ) + sin ( ) = 2sin with the help of above
equations, the variables and can be calculated for correct
steering.
-
LOW SPEED TURNING
Off-tracking occurs at the rear wheels.Off - tracking distance.
= R [1 cos (L / R)]Using the expression for a series expansion of
the cosinecos z = 1 z2/2 + z4/4 z6/6 .Then = L2 / 2RFor obvious
reasons, off tracking is primarily of concern with long wheel base
vehicles such as trucks and buses. For articulated trucks, the
geometric equations become more complicated and are known as
tractrix equations.
-
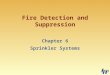
HIGHS SPEED CORNERING
At high speed, the turning equations deffer because lateral
acceleration will be present. To counteract the lateral
acceleration the tyres must develop lateral forces, and slip angles
will be present at each wheel.Slip angle. The angle between
direction of heading and direction of travel of a wheel is known as
slip angle.The cornering force. The lateral force denoted by Fy, is
called as the cornering force when the camber angle is zero.At a
given tyre load, the the cornering force grows with slip angle. At
low slip angles (50 or less):Fy = CWhere,C = cornering stiffness =
slip angleA positive slip produces negative force (to the left) on
the tyre.SAE defines cornering stiffness as the negative of the
slope, such that C takes on a positive value.
-
VARIABLES AFFECTING CORNERING STIFFNESS
Tyre size and type (radial versus bias ply construction)Number
of pliesCord angleWheel widthTreadsFor a given tyre:LoadInflation
pressure
-
HIGH SPEED CORNERING
Cornering forces (contd):Cornering coefficientCC = C /
FzCornering equations Fy = Fyf + Fyr = MV2 / RWhere,Fyf = lateral
cornering force at the front axle.Fyr = lateral (cornering) force
at the rear axle.M = mass of the vehicleV = forward velocityR =
radius of turnAlso,Fyfb Fyr c = 0ThusFyf = Fyr . c/bSubstituting
into equationMV2 / R = Fyr (c/b + 1) = Fyr (b + c)/b = Fyr L/bFyr =
Mb/L (V2/R)f = Wf V2 / (CfgR)Andr = Wr V2 / (CrgR)
-
HIGH SPEED CORNERING
Cornering equations (contd)It can be seen that: = 57.3 L/R + f r
= 57.3 L/R + WfV2 / CfgR WrV2 / CrgR = 57.3 L/R + (Wf/Cf Wr/Cr)V2 /
gRWhere, = steer angle at the front wheelCf = cornering stiffness
of the front axle tyresCr = cornering stiffness of the rear axle
tyresUndersteer gradientThe above equation can be written in the
short: = 57.3 L/R + KayWhereK = understeer gradient (deg / g)ay =
lateral acceleration
-
HIGH SPEED CORNERING
Understeer gradientHere,K = Wf/Cf Wr/Cr There are three
possibilities:Neutral steer: K = 0 OrWf / Cf = Wr / CrTherefore,f =
rOn a constant radius turn, there is no change in steer angle.
Steer angle = ackerman angle = 57.3 L/R.Neutral steer case
corresponds to a balance on the vehicle such that the force of the
lateral acceleration at the CG causes an identical increase in slip
angle at both the front and rear wheels.Understeer: K > 0OrWf /
Cf > Wr / CrTherefore,f > rThe steer angle will have to
increase with speed in proportion to K timmes the lateral
acceleration in gs.
-
HIGH SPEED CORNERING
Understeer gradientUndersteer (contd)Thus it increases linearly
with the lateral acceleration. In the under steer case, the lateral
acceleration causes the front wheel to slip side ways to a greater
extent than at the rear wheels. Thus, front wheel require to be
steered to a greater angle.Oversteer: K < 0OrWf / Cf < Wr /
CrTherefore,f < rThe steer angle will have to decrease with
speed. In the this case, the lateral acceleration causes the rear
wheel to slip side ways to a greater extent than at the front
wheels. Thus, front wheel require to be steered to a lesser
angle.
-
HIGH SPEED CORNERING
Characteristic speedFor an under steer vehicle,The speed at
which the steer angle required to negotiate any turn is twice the
ackerman angle. = 57.3 L/R + Kay If = 2 . 57.3 L/RThen2 x 57.3 L/R
= 57.3 L/R + Kay OrK ay = 57.3 L/Ray = V2 / R = 57.3Lg/KRV2 =
57.3Lg / KVchar = (57.3Lg / K)0.5Critical speedIn the over steer
case, a critical speed will exist above which the vehicle will be
unstableVcrit = (-57.3 Lg / K)0.5Long wheel base vehicles have a
higher critical speed. An over steer vehicle can be driven at
speeds less than critical and becomes directionally unstable above
this speed.
-
HIGH SPEED CORNERING
Lateral acceleration gainIt is the ratio of lateral acceleration
to the steering angleay / = [V2/57.3Lg) / [1 + KV2/57.3 Lg]When K =
0lateral acceleration gain V2When V = Vcrit, lateral acceleration =
Yaw velocity gainRatio of yaw velocity to the steering angle. =
r/Yaw velocity, r, is the rate of rotation in heading angle.r =
57.3 V / Rr / = (V/L) / [1 + KV2/57.3Lg]Side slip angleAt any point
on the vehicle, a side slip angle may be defined as the angle
between the longitudinal axis and the local direction of travel.For
any spee the side slip angle , at CG will be: = 57.3 c/R r = 57.3
c/R WV2 / (CrgR)
-
HIGH SPEED CORNERING
Side slip angle (contd)The speed at which the side slip angle
becomes 0 is:V = 0 = (57.3 gc Cr / Wr)0.5Side slip angle is
independent of radius of turn.Static Marginthe static margin is
defined as the distance the neutral point falls behind the CG,
normalised by wheel base.static margin = e / LStatic margin is
determined by the point on the vehicle where a side force will
produce no steady state yaw velocity (i.e., the neutral steer
point). Neutral steer line is the locus of points in the x z plane
along which external lateral forces produce no steady state yaw
velocity.When the point is behind the CG, the static margin is +ve
and the vehicle is under steer.At the CG the margin is 0, and
neutral steer.When ahead of CG, -ve, over steer.
-
SUSPENSION EFFECT ON CORNERING
Oileys definition for understeer / oversteer vehicle.When the
front axle is more compliant than the rear (understeer vehicle), a
lateral disturbance produces more side slip at the front axle,
hence the vehicle turns awayfrom the disturbance. If the rear axle
exhibits more cornering compliance (oversteer), the rear of the
vehicledrifts out and it turns into the disturbance. The lateral
acceleration acting at the CG adds to the disturbance force further
increasing the turning response and instability.
-
SUSPENSION EFFECT ON CORNERING
Roll moment distribution.Understeer / oversteer of a vehicle
depends upon the balance of roll moments distributed on the front
and rear axles. More roll moment on the front axle contributes to
underrsteer, whereas more roll moment on the rear axle contributes
to oversteer.K = 0.5 Kss2Where, K = roll stiffness of the
suspensionKs = vertical rate of each of the left and right
springs.s = lateral seperation between the springs
Roll center. The point at which the lateral forces are
transferred from the axles to sprung mass.Roll center can also be
thought of as the point on the body at which lateral forces
application will produce no roll angle.It is the point around which
the axle rolls when subjected to a pure roll moment.Fzo Fzi =
2Fyhr/t + 2K/t = 2Fz
-
SUSPENSION EFFECT ON CORNERING
Roll moment distribution.Where,Fzo = load on the outside
wheelFzi = load on the inside wheel Fy = lateral force = Fyo + Fyi
hr = roll center height = roll angle of the bodyLateral load
transfer arises from two mechanisms:2Fy hr / t = load transfer due
to cornering force2K / t = lateral load transfer due to vehicle
roll.M = [W h1 sin + h1 cos . W V2 / Rg ]cos For small angle sin =
cos = 1 and cos = 1Then,M = Wh1[ + V2/Rg]But M = Mf + Mr = (Kf +
Kr)Thus = [Wh1 V2/Rg] / [Kf + Kr Wh1]Roll rate of the vehicle =
d/day = Wh1 / [Kf + Kr Wh1]
-
SUSPENSION EFFECT ON CORNERING
Roll moment distribution.For front and rear axles momentsMf =
{Kf[Wh1V2/Rg)] / [Kf + Kr Wh1]} + Wf hf V2 / Rg = Fzf tfMr =
{Kr[Wh1V2/Rg)] / [Kf + Kr Wh1]} + Wr hr V2 / Rg = Fzr trWhere,Fzf =
Fzfo Wf/2 = - (Fzfi Wf/2)Fzr = Fzro Wr/2 = - (Fzri Wr/2)
-
SUSPENSION EFFECT ON CORNERING
Roll moment distribution on vehicles tends to be biased towards
the front wheels due to a number of factors:Relative to load, the
front spring rate is usually slightly lower than that at the rear
(for flat ride), which produces a bias towards higher roll
stiffness at the rear. However, independent front suspensions used
on virtually all cars enhance front roll stiffness because of the
effectively greater spread on the front suspension
springs.Designers usually strive for higher front roll stiffness to
ensure understeer in the limit of cornering.Stabiliser bars are
often used on the front axle to obtain higher front roll
stiffness.If stabilizer bars are needed to reduce body lean, they
may be installed on the front or on the front and rear. Caution
should be used when adding a stabilizer bar only to the rear
because of the potential to induce unwanted oversteer.
-
SUSPENSION EFFECT ON CORNERING
Fy = C Where,Fy = Lateral force developed von the axleC =
cornering stiffness of two tyres, each at one half the axle load. =
slip angleThe cornering stiffness of each tyre can be represented
by a second or higher order polynomial and the lateral force
developed by either can be written as:Fy = C = (a Fz b Fz2)WhereFy
= lateral force of one tyreC = cornering stiffness of one tyre =
first coefficient in the cornering stiffness polynomialb = second
coefficient in the cornering stiffness polynomialFz = load on one
tyre (assumed equal on both tyres in previous analysis)
-
SUSPENSION EFFECT ON CORNERING
For a vehicle cornering, the lateral force of both tyres Fy is
given by:Fy = (a Fzo b Fzo2 + a Fzi b Fzi2 ) C Now let the load
change on each wheel be given by FzFzo = Fz + FzFzi = Fz FzThenFy =
[a(Fz + Fz) b (Fz + Fz)2 + a Fz Fz) - b (Fz Fz)2]This equation
reduces to:Fy = [2aFz 2b Fz2 2bFz2]C = 2aFz 2bFz2OrFy = [C
2bFz2]Now = 57.3 L/R f rFor the two tyres on the front we can
write:Fyf = [Cf 2bFz2] f = WfV2 / RgAnd on the rear Fyr = [Cr
2bFzr2] r = WrV2 / RgThus, = 57.3L/R + [(WfV2 / Rg) / (Cf 2bFzf2)]
- [(WrV2 / Rg) / (Cr 2bFzr2)]
-
SUSPENSION EFFECT ON CORNERING
Since C >> 2bFz2Then1/ (C 2bFz2) = 1/[C (1 2bFz2 / C )] =
1/(1 + 2bFz2 / C) / C The equation for can be written as: = 57.3L/R
+ [(Wf /Cf - Wr / Cr) + (Wf 2bFzf2 /Cf2 Wr 2bFzr2 /Cr2)] V2 /
RgFirst term in the bracket is simply the understeer gradient
arising from the nominal cornering stiffness of the tyres, Ktyres,
as was developed earlier. The second term represents the understeer
gradient arising from lateral load transfer on the tyres, i.e.,Kllt
= Wf 2bFzf2 /Cf2 Wr 2bFzr2 /Cr2Since all the variables in the above
equation are positive, the contribution from front axle is always
understeer; that from the rear axle is always negative, meaning it
is oversteer.
-
SUSPENSION EFFECT ON CORNERING
Camber change:The inclination of a wheel outward from the body
is known as the camber angle. The camber on a wheel will produce a
lateral force known as camber thrust.Camber angle produces much
lesser force than slip angle.Camber thrust is additive to the
cornering force from slip angle, thus affecting understeer.The
total camber angle during cornering will be:g = b + Where, g =
camber angle with respect to the ground b = camber angle of the
wheel with respect to the body = roll angle of the vehicle.The
camber angle arising from the suspension is a function of the roll
angle, because the jounce on the inside wheel and the rebound on
the outside wheel relate directly to roll angle.
-
SUSPENSION EFFECT ON CORNERING
Camber change:Fy = C + CThus, = Fy / C C / Cf = Wf . ay /C (C/C)
. (f / ) . ( / ay)ayand r = Wr . ay /C (C/C) . (r / ) . ( / ay)ay
Substituting these in the turning equation = 57.3L / R + [(Wf/Cf
Wr/Cr) + (Cf f / Cf Cr r / Cr ) . /ay] . V2/RgKcamber = (Cf f / Cf
Cr r / Cr ) . /ayRoll steerRoll steer is defined as the steering
motion of the front or rear wheels with respect to the sprung mass
that is due to the rolling motion of the sprung mass.Let be the
roll steer coefficient on an axleThe understeer gradient
contribution from roll steer = Kroll steer = (f r) . /ayA +ve roll
steer coefficient causes the wheels to steer to the right in a
-
SUSPENSION EFFECT ON CORNERING
Roll steerRight hand roll.Positive roll steer on the front axle
steers out and is understeer.Conversely positive roll steer on the
rear axle is oversteer.On solid axles, roll steer coefficient is
equal to the inclination angle of the trailing arms.Lataral force
compliance steer.With a forward yaw center on a rear axle, the
compliance allows the axle to steer towards the outside of the
turn, thus causing oversteer. Conversely, a rearward yaw center
results in understeer.On a front axle, just opposite is true a
rearward yaw center is oversteer and a forward yaw center is
understeer.Lateral force compliance steer coefficient A = c /
FyWhere,c = steer angleFy = lateral forceOn the front axlecf = Af .
Fyf = Af . Wf . ay
-
SUSPENSION EFFECT ON CORNERING
Lataral force compliance steer. (contd)Klfcs = Af . Wf - Ar . Wr
Aligning torque.The aligning torque is the source of understeer
effect.Kat = WP / L . [(Cf + Cr) / (Cf . Cr)]Because C values are
positive, the aligning torque effect is positive (understeer) and
cannot ever be negative (oversteer).
-
EFFECT OF TRACTIVE FORCES ON CORNERING
WfV2 / (Rg) = Fyf cos (f + ) + Fxf sin (f + )Wr V2 / (Rg) = Fyr
cos r + Fxr sin rWhere,Wf , Wr = load on the front and rear axlesV
= forward speedR = radius of turnFyf , Fyr = cornering forces on
front and rear axles.Fxf , Fxr = tractive forces on the front and
rear axlesf , r = slip angles at front and rear wheels.Solving for
f and r and assuming small angles, i.e., cos = 1 and sin = , and
substituting into equation = 57.3 L / R + f r = [57.3 L/R / (1 +
Fxf/Cf)] + [(WfV2/CfRg)/(1 + Fxf/Cf )] + [(WrV2/CrRg)/(1 + Fxr/Cr
)]Since Fxf / Cfand Fxr / Cr are much less than one1 / (1 + Fxf/Cf)
= 1 - Fxf/CfThen = [57.3 L/R / (1 + Fxf/Cf)] + [(Wf/Cf Wr/Cr)
(WfFxf/Cf2 WrFxr/Cr2)] . V2/Rg
-
EFFECT OF TRACTIVE FORCES ON CORNERING
= [57.3 L/R / (1 + Fxf/Cf)] + [(Wf/Cf Wr/Cr) (WfFxf/Cf2
WrFxr/Cr2)] . V2/RgThis is the final turning equation for the case
where tractive forces are taken into account. The three terms on
the right side are:Term 1; this is the ackerman steer angle altered
by the reactive force on the front axleTerm 2: this is the
understeer gradientTerm 3: this term represents the effect of
tractive forces on the understeer behaviour of the vehicle.
-
SUMMERY OF UNDERSTEER EFFECTS
Understeer componentssourceKtyres = Wf/Cf Wr/CrTyre cornering
stiffnessKcamber = (Cf f/Cf - Cr r/Cr) . /ayCamber thrustKroll
steer = (f r) d/dayRoll steerKlfcs = Af Wf Ar WrLateral force
compliance steerKat = Wp/L[(Cf + Cr) / Cf . CrAligning torqueKllt =
(Wf/Cf) . (2bFzf2/Cf) - (Wr/Cr) . (2bFzr2/Cr) Lateral load
transferKstrg = -Wf(rv + p) / KssSteering system
-
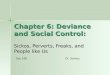
EXPERIMENTAL MEASUREMENTS OF UNDERSTEER GRADIENT
CONSTANT RADIUS METHOD
CONSTANT SPEED METHOD
-
EXAMPLE PROBLEM 1
A car has a weight of 1901 lb front axle and 1552 lb on the rear
with a wheel base of 100.6 inches. The tyres have the following
cornering stiffness values:
Determine the following cornering properties for the
vehicle;Ackerman steer angle for 500, 200, 100 and 50 ft turn
radiusUndersteer gradientCharacteristic speedLateral acceleration
gain at 60 mphYaw velocity gain at 60 mphSide slip angle at the CG
on an 800 ft radius turn at 60 mphStatic margin
loadCornering stiffnessCornering
coefficient225670.2684501210.2696751710.2539002250.25011252570.22813503000.222
-
EXAMPLE PROBLEM 2
A passenger car has an equal arm (parallel) independent front
suspension and a conventional solid rear axle with leaf spring
suspension. The front suspension has a roll stiffness Kf of 1500
in-lb/deg. The leaf springs have a rate of 115 lb/in and a lateral
seperation of 40 inches.What is the rear suspension roll
stiffness.If the sprung mass is 2750 lb at a CG height 8 inches
above the roll axis, what is the roll rate?Assuming a camber
stiffness that is 10% of the cornering stiffness, estimate the
under steer gradient due to camber effects.The rear leaf springs
have an effective trailing arm angle of -70 (the negative sign
means that the pivot of the arms is below the wheel center), what
is the under steer gradient due to rear roll steer?
-
GEOMETRY OF A TURNING VEHICLE
-
TYRE CORNERING FORCE PROPERTIES
-
VARIABLES AFFECTING TYRE CORNERING STIFFNESS
-
CORNERING OF A BICYCLE MODEL
-
CHANGE OF STEERING ANGLE WITH SPEED
-
YAW VELOCITY GAIN AS A FUNCTION OF SPEED
-
SIDE SLIP ANGLE ON A LOW SPEED TURN
-
SIDE SLIP ANGLE ON A HIGH SPEED TURN
-
NEUTRAL STEER LINE ON A VEHICLE
-
OILEYS DEFINITIONS FOR UNDER STEER / OVER STEER
-
LATERAL FORCE VERTICAL LOAD CHARACTERISTICS OF TYRES
-
FORCE ANALYSIS OF A SIMPLE VEHICLE IN CORNERING
-
FORCE ANALYSIS FOR ROLL OF A VEHICLE
-
LATERAL FORCE CAUSED BY CAMBER OF A TYRE
-
CAMBER CHANGE IN CORNERING OF A VEHICLE
-
ROLL STEER WITH A SOLID AXLE
-
INFLUENCE OF REAR AXLE TRAILING ARM ANGLE ON UNDER STEER
-
STEER DUE TO LATERAL COMPLIAQNCE IN THE SUSPENSION
-
CORNERING MODEL WITH TRACTIVE FORCES
-
EXAMPLE MEASUREMENT OF UNDER STEER GRADIENT BY CONSTANT RADIUS
METHOD
-
EXAMPLE MEASUREMENT OF UNDER STEER GRADIENT BY CONSTANT SPEED
METHOD
*********