Embed Size (px)
Citation preview

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!2!
Chapter 7. AC Equivalent Circuit Modeling!
7.1 !Introduction!7.2 !The basic AC modeling approach!
7.3 !State-space averaging!7.4 !Circuit averaging and averaged switch modeling!7.5 !The canonical circuit model!7.6 !Modeling the pulse-width modulator!7.7 !Summary of key points!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!3!
7.1. !Introduction!
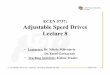
A simple dc-dc regulator system, employing a buck converter!
Objective: maintain v(t) equal to an accurate, constant value V.!There are disturbances:!
• in vg(t)!• in R!
There are uncertainties:!• in element
values!
• in Vg!• in R
+–
+
v(t)
–
vg(t)
Switching converterPowerinput
Load
–+
R
Compensator
Gc(s)
vrefVoltage
reference
v
Feedbackconnection
Pulse-widthmodulator
vc
Transistorgate driver
c(t)
c(t)
TsdTs t t
vc(t)
Controller

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!4!
Applications of control in power electronics!
DC-DC converters!Regulate dc output voltage.!
Control the duty cycle d(t) such that v(t) accurately follows a reference signal vref.!
DC-AC inverters!Regulate an ac output voltage. !Control the duty cycle d(t) such that v(t) accurately follows a reference signal vref (t).!
AC-DC rectifiers!
Regulate the dc output voltage.!Regulate the ac input current waveform.!
Control the duty cycle d(t) such that ig (t) accurately follows a reference signal iref (t), and v(t) accurately follows a reference signal vref.!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!5!
Converter Modeling!
Applications!Aerospace worst-case analysis!Commercial high-volume production: design for reliability and yield!
High quality design!Ensure that the converter works well under worst-case conditions!– Steady state (losses, efficiency, voltage regulation)!– Small-signal ac (controller stability and transient response)!
Engineering methodology!Simulate model during preliminary design (design verification)!Construct laboratory prototype converter system and make it work under
nominal conditions!Develop a converter model. Refine model until it predicts behavior of
nominal laboratory prototype!Use model to predict behavior under worst-case conditions!Improve design until worst-case behavior meets specifications (or until
reliability and production yield are acceptable)!!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!6!
Objective of Part II!
Develop tools for modeling, analysis, and design of converter control systems!
Need dynamic models of converters:!How do ac variations in vg(t), R, or d(t) affect the output voltage v(t)?!What are the small-signal transfer functions of the converter?!
• Extend the steady-state converter models of Chapters 2 and 3, to include CCM converter dynamics (Chapter 7)!
• Construct converter small-signal transfer functions (Chapter 8)!• Design converter control systems (Chapter 9)!
• Design input EMI filters that do not disrupt control system operation (Chapter 10)!
• Model converters operating in DCM (Chapter 11)!• Current-programmed control of converters (Chapter 12)!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!7!
Modeling!
• Representation of physical behavior by mathematical means!
• Model dominant behavior of system, ignore other insignificant phenomena!
• Simplified model yields physical insight, allowing engineer to design system to operate in specified manner!
• Approximations neglect small but complicating phenomena!
• After basic insight has been gained, model can be refined (if it is judged worthwhile to expend the engineering effort to do so), to account for some of the previously neglected phenomena!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!8!
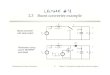
Finding the response to ac variations"Neglecting the switching ripple!
This causes the duty cycle to be modulated sinusoidally:!
Assume D and Dm are constants, ⏐Dm⏐ < D, and the modulation frequency ωm is much smaller than the converter switching frequency ωs = 2πfs.!
d(t) = D + Dmcostmt
0 5 10 15 200
0.5
1
0 5 10 15 200
2
4
6
0 5 10 15 20−17
−16
−15
−14
−13
hiL(t)iTs
iL(t)
vc(t)
Gate drive!(a)!
(b)!
(c)!
tTs
tTs
tTs
hv(t)iTs
v(t)
228 7 AC Equivalent Circuit Modeling
+–
+
v(t)
–
vg(t)
Switching converterPowerinput
Load
–+
R
Compensator
Gc(s)
vrefVoltage
reference
v
Feedbackconnection
Pulse-widthmodulator
vc
Transistorgate driver
c(t)
c(t)
TsdTs t t
vc(t)
Controller
Fig. 7.1. A simple dc–dc regulator system, including a buck converter power stage and a feedback network.
eling process involves use of approximations to neglect small but complicating phenomena, inan attempt to understand what is most important. Once this basic insight is gained, it may bedesirable to carefully refine the model, by accounting for some of the previously ignored phe-nomena. It is a fact of life that real, physical systems are complex, and their detailed analysiscan easily lead to an intractable and useless mathematical mess. Approximate models are animportant tool for gaining understanding and physical insight.
As discussed in Chapter 2, the switching ripple is small in a well-designed converter operat-ing in continuous conduction mode (CCM). Hence, we should ignore the switching ripple, andmodel only the underlying ac variations in the converter waveforms. For example, suppose thatsome ac variation is introduced into the control signal vc(t), such that
vc(t) = Vc + Vcm cos!mt (7.1)
where Vc and Vcm are constants, |Vcm| ⌧ Vc, and the modulation frequency !m is much smallerthan the converter switching frequency !S = 2⇡ fs. This control signal is fed into a pulse-widthmodulator (PWM) that generates a gate drive signal having switching frequency fs = 1/Tsand whose duty cycle during each switching period depends on the control signal vc(t) appliedduring that period. The resulting transistor gate drive signal is illustrated in Fig. 7.2(a), and atypical converter inductor current and output voltage waveforms iL(t) and v(t) are illustrated inFig. 7.2(b). The spectrum of v(t) is illustrated in Fig. 7.3. This spectrum contains components atthe switching frequency as well as its harmonics and sidebands; these components are small inmagnitude if the switching ripple is small. In addition, the spectrum contains a low-frequencycomponent at the modulation frequency !m. The magnitude and phase of this component de-pend not only on the control signal and duty cycle variation, but also on the frequency responseof the converter. If we neglect the switching ripple, then this low-frequency component remains
Suppose the control signal varies sinusoidally:!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!9!
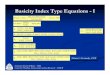
Output voltage spectrum"with sinusoidal modulation of duty cycle!
Contains frequency components at:!• Modulation frequency and its
harmonics!• Switching frequency and its
harmonics!• Sidebands of switching frequency!
With small switching ripple, high-frequency components (switching harmonics and sidebands) are small.!If ripple is neglected, then only low-frequency components (modulation frequency and harmonics) remain.!
Spectrumof v(t)
tm ts t
{Modulationfrequency and its
harmonics {Switchingfrequency and
sidebands {Switchingharmonics

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!10!
Objective of ac converter modeling!
• Predict how low-frequency variations in duty cycle induce low-frequency variations in the converter voltages and currents!
• Ignore the switching ripple!
• Ignore complicated switching harmonics and sidebands!
Approach:!
• Remove switching harmonics by averaging all waveforms over one switching period!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!11!
Averaging to remove switching ripple!
where!
Average over one switching period to remove switching ripple:!
Note that, in steady-state,!
vL(t) Ts= 0
iC(t) Ts= 0
by inductor volt-second balance and capacitor charge balance.!
Ld iL(t) Ts
dt = vL(t) Ts
Cd vC(t) Ts
dt = iC(t) Ts
230 7 AC Equivalent Circuit Modeling
LdhiL(t)iTs
dt= hvL(t)iTs
CdhvC(t)iTs
dt= hiC(t)iTs (7.2)
where hx(t)iTs denotes the average of x(t) over an interval of length Ts:
hx(t)iTs =1Ts
Z t+Ts/2
t�Ts/2x(⌧)d⌧ (7.3)
So we will employ the basic approximation of removing the high-frequency switching rippleby averaging over one switching period. Yet the average value is allowed to vary from oneswitching period to the next, such that low-frequency variations are modeled. In e↵ect, the“moving average” of Eq. (7.3) constitutes low-pass filtering of the waveform. A few of thenumerous references on averaged modeling of switching converters are listed at the end of thischapter [69–88].
Note that the principles of inductor volt-second balance and capacitor charge balance predictthat the right-hand sides of Eqs. (7.2) are zero when the converter operates in equilibrium.Equations (7.2) describe how the inductor currents and capacitor voltages change when nonzeroaverage inductor voltage and capacitor current are applied over a switching period.
The averaged inductor voltage and capacitor currents of Eq. (7.2) are, in general, nonlin-ear functions of the signals in the converter, and hence Eqs. (7.2) constitute a set of nonlineardi↵erential equations. Indeed, the spectrum in Fig. 7.3 also contains harmonics of the modu-lation frequency !m. In most converters, these harmonics become significant in magnitude asthe modulation frequency !m approaches the switching frequency !s, or as the modulationamplitude Dm approaches the quiescent duty cycle D. Nonlinear elements are not uncommon inelectrical engineering; indeed, all semiconductor devices exhibit nonlinear behavior. To obtaina linear model that is easier to analyze, we usually construct a small-signal model that has beenlinearized about a quiescent operating point, in which the harmonics of the modulation or ex-citation frequency are neglected. As an example, Fig. 7.4 illustrates linearization of the familiardiode i–v characteristic shown in Fig. 7.4(b). Suppose that the diode current i(t) has a quiescent(dc) value I and a signal component i(t). As a result, the voltage v(t) across the diode has aquiescent value V and a signal component v(t). If the signal components are small compared tothe quiescent values,
|v| ⌧ |V |, |i| ⌧ |I| (7.4)
then the relationship between v(t) and i(t) is approximately linear, v(t) = rDi(t). The conductance1/rD represents the slope of the diode characteristic, evaluated at the quiescent operating point.The small-signal equivalent circuit model of Fig. 7.4(c) describes the diode behavior for smallvariations around the quiescent operating point.
An example of a nonlinear converter characteristic is the dependence of the steady-stateoutput voltage V of the buck-boost converter on the duty cycle D, illustrated in Fig. 7.5. Supposethat the converter operates with some dc output voltage, say, V = �Vg, corresponding to aquiescent duty cycle of D = 0.5. Duty cycle variations d about this quiescent value will excitevariations v in the output voltage. If the magnitude of the duty cycle variation is su�cientlysmall, then we can compute the resulting output voltage variations by linearizing the curve. Theslope of the linearized characteristic in Fig. 7.5 is chosen to be equal to the slope of the actualnonlinear characteristic at the quiescent operating point; this slope is the dc control-to-output

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!12!
Nonlinear averaged equations!
The averaged voltages and currents are, in general, nonlinear functions of the converter duty cycle, voltages, and currents. Hence, the averaged equations!
constitute a system of nonlinear differential equations.!Hence, must linearize by constructing a small-signal converter model.!
Ld iL(t) Ts
dt = vL(t) Ts
Cd vC(t) Ts
dt = iC(t) Ts

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!13!
Small-signal modeling of the diode!
Nonlinear diode, driven by current source having a DC and small AC component!
Linearization of the diode i-v characteristic about a quiescent operating point!
+
v = V+v
–
i = I+i
0 1 V
5 A
4 A
3 A
2 A
1 A
0
v
i
Quiescentoperatingpoint
Actualnonlinear
characteristicLinearizedfunction
i(t)I
v(t)
V
0.5 V
+
v
–
i
rD
Small-signal AC model!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!14!
Buck-boost converter:"nonlinear static control-to-output characteristic!
Example: linearization at the quiescent operating point!
D = 0.5
D
V
–Vg
0.5 100
Actualnonlinear
characteristic
Linearizedfunction
Quiescentoperatingpoint
V = Vg D/(1 – D)!

Fundamentals of Power Electronics! Chapter 7: AC equivalent circuit modeling!15!
Result of averaged small-signal ac modeling!
Small-signal ac equivalent circuit model!
buck-boost example!
+–
+–
L
RC
1 : D Dv : 1
vg(t) Id (t)
Vg – V d (t)
Id (t) v(t)
+
–