-
ECB4034 - Chemical Process Instrumentation and Control*Chapter
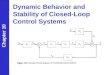
9STABILITY OF CLOSED-LOOP CONTROL SYSTEMS
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*Chapter
ObjectivesEnd of this chapter, you should be able to:Explain the
concepts of feedback control systemsDetermine the stability of
control systems using Routh Hurwitz Criteria
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and
Control*IntroductionAn important consequence of feedback control is
that it can cause oscillatory responses. Under certain
circumstances, the oscillations may be undamped or even have
amplitude that increases with time until a physical limit is
reached. In these situations, the closed-loop system is said to be
unstable.
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*Control
system:Consider the feedback control system with the following
transfer functions:
ECB4034 - Chemical Process Instrumentation and Control
(9.1)
_1134563459.unknown
_1134563493.unknown
_1134563517.unknown
_1134563361.unknown
Consider a step change in set-point
.
The transfer function for set-point changes is:
(9.2)
_1133677621.unknown
_1134563584.unknown
Substituting (9.1) in (9.2), and rearranging
gives us
(9.3)
_1134563886.unknown
-
ECB4034 - Chemical Process Instrumentation and Control* After Kc
is specified, y(t) can be obtained.Fig. below demonstrates that as
Kc increases, the response become more oscillatory and is unstable
for Kc = 15.
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*General
Stability Criterion:Most industrial processes are stable without
feedback controllers. They are said to be open-loop stable or
self-regulating.Definition of stability:An unconstrained linear
system is said to be stable if the output response is bounded for
all bounded inputs. Otherwise, it is said to be unstable.By a
bounded input, we mean an input variable that stays within upper
and lower limits for all values of time. The term unconstrained
refer to the ideal situation where there is no physical limits on
the input and output variables.
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and
Control*Characteristic equation
ECB4034 - Chemical Process Instrumentation and Control
For the block diagram shown above, we have developed that
(9.4)
where GOL is the open-loop transfer function, GOL =
GcGpGvGm.
_1133677641.unknown
Consider set-point changes only. Eq. (9.4) reduces to
(9.5)
_1134565665.unknown
If GOL is a ratio of polynomials in s, then the closed-loop
transfer function in (9.5) is also a rational function. Then, it
can be factored into poles (pi) and zeroes (zi) as
(9.6)
_1134566089.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*
ECB4034 - Chemical Process Instrumentation and Control
where K is a multiplicative constant selected to give the
correct steady-state gain. To have a physically realizable system,
the number of poles must be greater than or equal to the number of
zeroes.
Comparing (9.5) and (9.6) indicates that the poles are also the
roots of the following equation, referred to as the characteristic
equation of the closed-loop system:
(9.7)
The characteristic equation plays a decisive role in determining
system stability.
_1134566487.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*
ECB4034 - Chemical Process Instrumentation and Control
Taking the inverse Laplace transform of (9.9) gives
(9.10)
_1134629018.unknown
For a unit step change in set-point, (9.6) becomes
(9.8)
_1206852666.unknown
If there are no repeat roots (all distinct poles), then the
partial fraction expansion of (9.8) has the form
(9.9)
_1206852681.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*
ECB4034 - Chemical Process Instrumentation and Control
Suppose that one of the poles is a positive real number; i.e.,
pk > 0.
Then it is clear from (9.10) that y(t) is unbounded and thus the
closed-loop system is unstable.
If pk is a complex number,
, with a positive real part, then the system is also
unstable.
If all the poles are negative (or have negative real parts) then
the system is stable.
_1134629301.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*General
stability criterion:A feedback control system is stable if and only
if all roots of the characteristic equation are negative or have
negative real parts. Otherwise, the system is unstable.
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*Graphical
interpretation of stability criterion: Roots of1 + GcGvGpGm(Each
test is for different value of Kc)
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*If the
characteristic equation is either first-order or second-order, we
can find the roots analytically. For higher-order polynomials, this
is not possible.
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control*Routh
Stability Criterion Uses an analytical technique for determining
whether any roots of a polynomial have positive real
parts.Characteristic equation
ECB4034 - Chemical Process Instrumentation and Control
(9.11)
where an >0. According to the Routh criterion, if any of the
coefficients a0, a1, aK, an-1 are negative or zero, then at least
one root of the characteristic equation lies in the RHP, and thus,
the system is unstable.
_1134633733.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*Routh
Array On the other hand, if all of the coefficients are positive,
then one must construct the Routh Array shown below: For stability,
all elements in the first column must be positive.
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and Control* The
first two rows of the Routh Array are comprised of the coefficients
in the characteristics equation. The elements in the remaining rows
are calculated from coefficients from the using the formulas:(n+1
rows must be constructed n = order of the characteristic eqn.)
ECB4034 - Chemical Process Instrumentation and Control
_1134634191.unknown
_1134634221.unknown
_1134634247.unknown
_1134634164.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*Routh
Stability Criterion: A necessary and sufficient condition for all
roots of the characteristic equation to have negative real parts is
that all of the elements in the left column of the Routh array are
positive. Solution: Because the s term is missing, its coefficient
is zero. Thus the system is unstable.
ECB4034 - Chemical Process Instrumentation and Control
Example 1: Determine the stability of a system that has the
characteristic equation
_1134634879.unknown
-
ECB4034 - Chemical Process Instrumentation and Control*Example
2
ECB4034 - Chemical Process Instrumentation and Control
Find the values of the controller gain Kc that make the feedback
control system with the following characteristic equation
unstable.
_1134635116.unknown
All coefficients are positive provided that 1+Kc > 0 or Kc
> -1.
-
ECB4034 - Chemical Process Instrumentation and Control* To have
a stable system, each element in the left column must be positive,
Kc < 12.6 and Kc > -1. Thus we conclude -1 < Kc <
12.6.The Routh array is:
ECB4034 - Chemical Process Instrumentation and Control
-
ECB4034 - Chemical Process Instrumentation and
Control*Conclusion!Concept of stabilityCriteria for stabilityRouth
Hurwitz Stability Analysis
ECB4034 - Chemical Process Instrumentation and Control