-
8/17/2019 Chapter10 - DP Operations
1/26
© Marine Institute Centre for Marine Simulation 10-1
School of Maritime Studies 2014 Rev. June/2014
Chapter 10
PLANNING and CONDUCTING DP OPERATIONS
-
8/17/2019 Chapter10 - DP Operations
2/26
10-2 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Notes
-
8/17/2019 Chapter10 - DP Operations
3/26
© Marine Institute Centre for Marine Simulation 10-3
School of Maritime Studies 2014 Rev. June/2014
Planning and Conducting DP Operations
Planning
Figure 10.1 on the next page shows a DSV next to a platform with
divers and ROV deployed. The operation is taking
place in 142m of water and the drawing is to scale. A
crane hook is being lowered and the diver will connect it to the
end
of a pipeline which has to be repositioned. Thorough planning
was required before the commencement of this operation
and is a requirement for any DP operation. All aspects of the
operation must be reviewed and discussed by all parties
involved. Planning should cover approaching the worksite,
setting up at the worksite, conducting of the DP operation and
departure from the worksite. The planning process should also
include contingency planning in the event that failures or
emergencies occur. This section will give a general overall
review of the various aspects of planning and conducting DP
operations. Details will vary depending on the type of vessel
and operation being conducted.
Before planning the operation we need to know worksite
information, environmental conditions, vessel capability,
vessel
system information and particulars of the job that is to be
completed by the vessel.
Worksite Information
The position or positions that the vessel will be asked to
maintain during the DP operation will have to be determined.
The
operation could involve holding station at one location for the
entire operation (working close to one side of a platform
as an example). The operation could require that the vessel work
on all four sides of the same platform during the course
of the operation with moves around the platform being conducted
while on DP. No platforms may be involved at all and
the operation may take place in open water. The vessel might be
in transit during the entire operation (cable laying for
example). A review of the physical layout of the worksite has to
be completed with respect to required vessel positions
during the DP operation.
The vessel might have to be positioned in a drift-on or blow-on
location. Meaning that, should there be a loss of power or
thrust, to the extent that the vessel is unable to hold
position, the environmental conditions will push the vessel towards
an
obstruction (such as a platform). Ideally a drift-off or
blow-off location is preferred as the vessel would be pushed
awayfrom the obstruction. Unfortunately, the required operational
location may prevent such a setup.
The heading or headings that the vessel will be asked to
maintain during the DP operation will have to be determined.
Heading change might not be possible at all during the
operation. The operation may take place close to the side of a
platform where limited or no heading changes are possible.
The operation being undertaken might limit the ability to
change heading (laying a rigid pipeline, for example).
Worksite information can be determined from diagrams provided by
the client, from surveyors onboard the vessel for this
particular job or by researching vessel records of past
operations at the site (assuming the vessel has previously operated
a
this location). Every effort should be made to ensure that the
worksite information is as recent and as accurate as possible.
A review of the worksite noting all hazards and obstructions
located on the surface or subsea has to be completed. Thiswould
include the approach to the worksite, the worksite itself and any
other areas the vessel may transit during the course
-
8/17/2019 Chapter10 - DP Operations
4/26
10-4 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
ROV
Diver
TMS
Bell
Figure 10.1
-
8/17/2019 Chapter10 - DP Operations
5/26
© Marine Institute Centre for Marine Simulation 10-5
School of Maritime Studies 2014 Rev. June/2014
» Location of any buoys or oating lines on the
surface.
» Location of any platforms in the area.
» Water depths, bottom contours and type of bottom,
wrecks, etc.
» Surface dimensions of platforms including distance
between lowest decks and sea level.
» Information and dimensions regarding attachments to
platforms such as are towers, catwalks, etc.
» Subsea dimensions, layout and shape of platforms. This
would include location of any attachments such as
umbilicals, pipelines, etc. » Location on the seabed of
pipelines, umbilicals, wellheads, manifolds, communications cables
and any
» other manmade objects that have been placed or dropped on the
seabed.
» In operations involving vessels or installations with
anchor lines the location and characteristics of the
moorings have to be determined.
» In operations involving mobile platforms such as FPSOs
or TLPs the motion characteristics and maximum
position movements of the platforms have to be
determined.
Any required guidance, rules or regulations for this particular
work location have to be obtained and reviewed. Guidance,
rules or regulations may be provided by the client, eld
operator, industry or government..
Master’s standing orders have to be considered. The company DP
Operation Manual will also provide guidance regardingthe conduct of
DP operations.
Environmental Conditions
Latest short and long term weather forecasts for the operations
area will have to be obtained. Forecast should include
information about the expected wind, sea conditions and
visibility at the worksite. The latest forecast should be
available
at all times during the DP operation.
Information regarding current/tidal rate and direction for the
operations area has to be obtained. The information can come
from relevant publications, client supplied information or from
past vessel experience in the particular area.
Weather trends and environmental conditions for the area
pertaining to the season of operation have to be reviewed. The
vessel may, for example, have to conduct operations at a time of
year when hurricanes occur frequently in the area of the
worksite.
The worksite may be in an area where ice is present at different
times of the year. If there is a possibility of ice being
present, ice forecasts would have to be obtained. Large
numbers of icebergs may mean that the vessel will be frequently
forced to move away from location. Isolated oes may cause no
problems for the vessel but may prevent HPR beacons
deployed on wires or Taut Wires from being used.
Environmental information obtained will be used to determine
vessel capability to carry out the job at hand.
Thrusters and Power Supplies
The status of the components of the vessels propulsion system
used for DP has to be determined. Status of vessel power
supply components (generators, UPS, etc.) relating to the DP
system must be determined as well. Between DP operations
the engineers or ships electrician may be taking advantage of
downtime to perform required maintenance or repairs on
equipment. Ample notice will have to be given of the intention
to commence DP operations. A determination will have to
be made as to whether equipment undergoing repairs or
maintenance is required for the DP operation and if so, the
time
-
8/17/2019 Chapter10 - DP Operations
6/26
10-6 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
at which the work is expected to be completed. The effect on the
DP operation of any faulty equipment will have to be
determined as it may affect vessels DP capability.
Depending on the required level of redundancy (see next section)
and power supply requirements for the job, a decision
has to be made as to the number of generators to be run. To
operate with the switchboard bus-tie (if tted) closed or open
will also have to be determined. Guidance on this matter may be
provided by regulation, client requirements or company
policy. The open or closed bus-tie decision has to be made
taking into account vessel equipment conguration and risksinvolved
with the job at hand.
Capability / Redundancy
Having determined worksite layout, expected environmental
conditions and vessel equipment status, a determination can
be made as to whether the vessel is capable of carrying
out the required DP operation.
When considering vessel capability the required level of
redundancy has to be considered. Redundancy implies that
critical components of the DP system are duplicated or backed
up. The required level of redundancy will depend on the
operation to be conducted and will be determined by regulatory,
industry or company requirements. On a Class 1 DP
vessel some or all of the components of the DP system may have
no backups and a single fault may cause loss of position.Class 2
& 3 vessels have different levels of redundancy (see class
requirements in Appendixes 1 and 2 of this manual) that
are aimed at preventing loss of position in the event of a
single point failures.
A Class 2 or 3 vessel does not automatically ensure that the
vessel always has redundancy. This must be checked and
veried before the DP operation begins and at all times
throughout the operation. A vessel has 3 main generators that
supply power for the thrusters but only one is running to meet
current power requirements. The vessel does not have
redundancy in the event the running generator fails. There are
backup generators but they require time to start and during
this time, no power is available for the thrusters. Redundancy
would be achieved when 2 generators are running, 1 shuts
down and the remaining generator can supply sufcient power to
meet current thrust requirements. Another example
might be a Class 2 vessel having 2 fully operational bow
thrusters which produce 15 tonnes of thrust each, at full power.
If
the total thrust requirement on the bow is only 3 tonnes and one
thruster fails, there would be redundancy as the remaining
thruster has enough power to meet requirements. However, if
there is an increase in environmental forces causing totalthrust
requirements to increase to 17 tonnes, there would not be
redundancy. The remaining thruster would not have
sufcient thrust and the vessel is likely to drift off position.
Problems affecting redundancy, such as faulty backup
systems, might be detected during checks prior to setting up on
DP. Others, such as the above requirement for too much
thrust, may not be observed until the vessel is actually set up
on DP. In any event, corrective action must be taken before
the operation can proceed.
The ability to change vessel heading can sometimes solve
problems relating to vessel capability. A monohull vessel
typically will have more capability when the overall
environmental force is on the bow or stern, rather than on the
beam.
The thrust problem above might be solved by choosing a more
appropriate vessel heading where the vessel has more
capability and consequently requires less thrust. This assumes
that from the worksite information obtained, the vessel can
change heading and that work being done permits the required
heading change.
A single fault on a Class 1 DP vessel, such as problems with a
single DP bridge console, could cause loss of position. This
does not imply that all faults will cause loss of position on a
Class1 vessel. Some components on the vessel may have
backups and these backups need to be considered. The bow
thruster arrangement described above might be tted and
redundancy provided by the dual thrusters should be given
consideration when planning the operation.
Along with redundancy, operational planning must ensure that the
vessel has enough thrust capability to hold both
position and heading while conducting the operation.
-
8/17/2019 Chapter10 - DP Operations
7/26
© Marine Institute Centre for Marine Simulation 10-7
School of Maritime Studies 2014 Rev. June/2014
To determine vessel capability in different environmental
conditions, capability plots for the vessel can be consulted.
These may be in paper format or as available, on some DP
systems, in electronic format . Electronic capability plots
which
are incorporated into some DP systems allow for the input of a
greater number of variables regarding actual conditions
and thus may be more accurate. Vessel capability indicated on
the plots should be used as guidance only. Conditions
used for compiling the plot such as draft, list, sea state, trim
& windage area may be different than those currently
being experienced by the vessel. Records of past vessel
performance while on DP can also provide guidance on vessel
performance.
On a Class 2 or 3 vessel, position and heading must be
maintained after a worse case failure. Vessel capability must
be
determined taking into consideration the worst case failure.
Capability plots often will indicate vessel capability in the
event of such failures. On a vessel with all thrusters driven
electrically of a switch board the worst case failure might be
a blackout on half the switchboard which would result in half of
the vessels power supply being lost. On a vessel where
each thruster has its own power supply and runs independently of
other ships systems, the worst case failure might be the
loss of the single most important thruster for a given
situation. A vessel may have sufcient capability to hold
position
with all systems operational but may not be able to hold
position in the event of a worse case failure.
Some DP systems have a built in function known as online
consequence analysis. When the vessel is on DP an analysis
of the vessels ability to maintain position in the event of
failures is regularly performed. If the system determines that
a
failure will result in loss of position, an alarm alerts the DP
operator. This feature has to be activated by the DP operatorand
its setup varies depending on DP system manufacturer.
Further checks which can be completed after the vessel is set up
on DP to ensure capability will be discussed later in this
chapter.
Sensors
Sensors tted will include gyros, wind sensors and motion sensors
in the form of Motion Reference Units (MRUs),
Vertical Reference Sensors (VRSs) or Vertical Reference Units
(VRUs). Some vessels may be tted with draft sensors.
Shuttle tankers using hawsers at loading terminals may have
sensors feeding hawser tension into the DP system. Cable
laying vessels that tow plows may feed towline tension into the
DP system via sensors. Pipe tension on a rigid pipe layvessel and
drag head tension on a dredge are two more examples.
The operational status of all sensors required for the DP
operation has to be determined. If more than one sensor of a
particular type is tted, readings have to be compared to
ensure that differences (if any) are within acceptable limits.
The
reason for any unacceptable differences must be determined. The
number of properly functioning sensors required to
provide the level of redundancy necessary for the job at
hand must also be considered.
Gyros tted have to be checked to ensure proper operation and
gyro errors determined. Wind sensors must be checked
to ensure that the readings provided reect actual wind
conditions being experienced by the vessel. Actual vessel
motion
should be compared with readings from motion sensors. Actual
vessel draft has to be compared with draft sensor readings.
Tension sensors should be checked for faults and readings
checked before values are input to the DP system.
Position References
The number of position references required will depend on the
nature of the operation and the required level of
redundancy needed for that job. References tted will vary from
vessel to vessel. This section will highlight some items to
be taken into account when planning the use of the six
principle types of references for a DP operation.
-
8/17/2019 Chapter10 - DP Operations
8/26
10-8 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Artemis:
» Determine a location at a suitable range from the
worksite for the Artemis x station (either on a xed
platform or onshore).
» Obtain permission to locate Artemis at the chosen
location.
» Determine coordinates of the x station and determine the
location of a visual reference object for calibrating
the x station for azimuth. Calculate the bearing of the
reference object. » If a suitable x station is already set up
at the worksite and available for the operation, it may be possible
to
obtain permission to use it. This will save the time required to
up your own reference station.
» Determine how transfer of Artemis equipment and setup
personnel to the xed station location will take
place.
» Decide on the frequency pair and selective address code
used to avoid interference with other Artemis users
in the area.
» Review work locations to determine if the mobile station
on the vessel will have line of sight with the x
station at all times during the operation. Consider objects that
might block signals such as platforms, other
vessels, crane operations, etc.
» Consider x and mobile antenna heights with regard to
limitations of vertical beam width.
» Consider any possible dip zones where direct and reected
signals may interfere with each other.
» Determine availability of a suitable power supply for the x
station. Platform supply may be used or Artemis
x station batteries might be only power source.
» Ensure x station is located to avoid possible
interference caused by platform operations or personnel.
Consider possibility of station being tampered with if
positioned ashore.
» There may be a requirement for the Artemis to be
intrinsically safe when used in some areas.
» To avoid possible interference, the vessels 3cm radar
should not be used when using Artemis as a DP
reference. A request might also be made of any vessels operating
in the immediate area that they also not use
3cm radars.
» Consider the effects that any forecast heavy
precipitation will have on system performance.
Cyscan/Fanbeam (Laser Systems):
» Determine a suitable location for the Cyscan/Fanbeam
reector (normally on a nearby platform).
» Obtain permission to locate the reector/reectors at the
chosen location. Having more than 1 reector will
provide backup in the event that one reector becomes
unusable.
» If a reector or reectors of suitable quality are already
set up at the worksite, they may be used instead.
» Determine how reector is to be transferred to deployment
location and determine who will set it up.
» Review work locations to determine if the sending unit
on the vessel will have line of sight with the reector
at all times during the operation. Consider objects that might
block signals such as platforms, other vessels,
crane operations, etc. It might be determined that more than one
reector has to be installed to ensure that
there is at least one target available at all times.
» Ensure reector is located to avoid possible interference
caused by platform operations or personnel.
» Consider objects in the vicinity of the vessel deployed
reector that may also return false target signals to the
sending unit or cause loss of target. This might include bright
lights or reective tape on life rings, lifeboatsor workers
clothing.
» Consider sending unit and reector heights with regard to
limitations of vertical beam width of laser signal.
» Sun low on the horizon behind the reector might cause
interference.
» Ensure that the lens of the sending unit is clean.
» Dirt on the reector may cause reduced signal strength or
loss of signal.
» Forecast rain or snow may cause disruption or loss of
signal.
-
8/17/2019 Chapter10 - DP Operations
9/26
© Marine Institute Centre for Marine Simulation 10-9
School of Maritime Studies 2014 Rev. June/2014
Differential Global Navigation Satellite Systems (DGNSS):
» Determine location of the source of differential
correction signals and frequencies used. These might come
from a satellite, from a coast station via HF radio or from a
nearby platform via UHF radio.
» Review the location of receiving antennae on the vessel
for possible sources of signal interference or blockage
of signals. It might be determined that on some vessel headings
differential signals might be interfered with
because a mast or crane is between the antenna and the
signal source. » Review work locations to determine if the
receiving antenna on the vessel will have line of sight with
differential signal transmission station at all times during the
operation. Consider objects that might interfere
with or block signals such as platforms, other vessels, crane
operations, etc.
» If possible, determine when atmospheric conditions might
cause interference with or total blockage of signals
from navigational satellites and/or differential correction
signals. Vessel or company records on signal outages
in the area or data from differential signal provider are
possible sources of information.
» Corrections received via HF radio may be subject to
atmospheric interference. Especially when the vessel is
operating close to the limits of radio coverage from the
reference station.
» Ensure that all times the differential correction
station is able to track and provide corrections for the same
satellites that are being tracked by the receiver on the vessel
(sufcient satellites to obtain a position x). This
may not be possible if the range to the correction station is
too great.
» Compare datum used by DP system with the received GPS
datum. Charts and surveys to be used for the
operation may be in a different datum.
Hydroacoustic Positioning Reference (HPR):
» Determine how many beacons are required for the job and
ensure that the number required are available and
have sufcient battery capacity. Depending on job length, plans
may have to be made to replace beacons
during the course of the operation so that batteries can be
recharged or replaced.
» Review subsea worksite layout so as not to position
beacons in areas where the beacons or attached weights
might cause damage to subsea equipment.
» Note subsea obstructions/seabed features that may cause
blockage or interference with HPR signals.
» Determine how HPR beacons used for the operation are to
be deployed (on a wire, on acoustic release, byROV, etc.).
» If beacons to be used by the vessel have been prelaid,
their positions and channel numbers must be obtained.
» Prelaid beacons that can be utilized, might be available
at a eld. These can be accessed after obtaining eld
operator permission and position/channel information.
» Other vessels in the area might be using HPR. They
should be contacted to determine if their operations
require the use of HPR and if so, what channels are being/going
to be used. This will avoid interference
caused by two operators using the same frequencies at the same
time.
» Users of HPR on own vessel, such as ROV or drilling
department, must be consulted as to beacon use. If they
are using the same frequencies as used for DP reference
purposes, interference may result.
» Sources of acoustic noise that may interfere with HPR
performance have to be considered. These might
include noise caused by the operation being conducted i.e.
drilling, rock dumping, ROV. In shallow water
noise from vessels own thrusters may have an adverse effect on
HPR performance. » HPR can have slow update rates in deep
water.
» Consider any interference that deployed beacons may
cause for subsea operations such as diving or ROV.
» Consider any maximum speed limitations for the vessel
when HPR poles are deployed and ensure sufcient
water depth before extending poles.
» If vessel has capability, obtain water density and
temperature information for input into HPR system. This wil
allow the system to apply corrections for these variables when
performing calculations.
-
8/17/2019 Chapter10 - DP Operations
10/26
10-10 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Taut Wire:
» Review subsea worksite layout so as not to position
clump weight in areas where it might cause damage to
subsea equipment.
» Ensure adequate wire length on the winch for the water
depth at the worksite.
» Water depth may be such that the weight of the wire
causes it to bend, creating angle measurement errors.
» Current may be too strong (i.e. bending of the wire) to
use the taut wire at the worksite. » Water depth may be too
shallow to use the taut wire. Example: Small vessel movements (1 -
3m) while on DP
will cause wire to move outside maximum allowed angle limits or
touch the vessels hull if taut wire is used at
worksite.
» Determine maximum vessel movements that will be possible
before having to replumb taut wire.
» Consider vessel movement in forecast sea conditions with
regard to launch and recovery of clump weight as
well as taut wire ability to operate properly in forecast
conditions (i.e. ability of the winch to respond quickly
enough to vessel motion).
» Determine the type of bottom at the worksite. A rocky
bottom might mean that the clump weight may drag as
smaller than normal angles. A soft muddy bottom might mean that
the clump weight will sink into the bottom
and be difcult to recover if left in location for long periods
without being replumb.
» Consider any interference that deployed clump weight may
cause for subsea operations such as diving or
ROV.
RadaScan/RADius (Microwave Systems):
» Determine a suitable location for the
responder/responders or transponder/transponders on the
platform.
» Obtain permission to locate the responder/responders or
transponder/transponders at the chosen location.
Having more than 1 responder or transponder will provide backup
in the event that one becomes unusable.
» If responders or transponders are already set up at the
worksite, they may be used instead. If permission for
the use of these transponders is granted, obtain the
identication codes.
» Determine how responder/transponder is to be transferred
to deployment location and determine who will set
it up.
» Review work location to determine if the
scanner/interrogator on the vessel will have line of sight with
theresponder/responders or transponder/transponders at all times
during the operation. Consider objects that
might block signals such as platforms, other vessels, crane
operations, etc. It might be determined that more
than one reector has to be installed to ensure that there is at
least one available at all times.
» Ensure that responder/transponder is located to avoid
possible interference caused by platform operations or
personnel.
» Consider scanner/interrogator and responder/transponder
heights and positions with regard to limitations of
vertical and horizontal signal beam widths.
» Check remaining battery life if responders/transponders
are battery powered.
» If responders/transponders require platform power,
determine availability of suitable power supply.
» There may be a requirement for the
responders/transponders to be intrinsically safe when used in some
areas.
As far as possible, operational status of reference systems
should be checked before the job commences. As mentioned
above, there will be a minimum number of references required for
each job. If a vessel is equipped with references in
addition to that minimum requirement, it may be prudent to use
these addition references or at the very least have them on
standby and ready to go. This will provide backup in case of a
reference system failure and possibly prevent suspending
DP operations because insufcient references are available.
-
8/17/2019 Chapter10 - DP Operations
11/26
© Marine Institute Centre for Marine Simulation 10-11
School of Maritime Studies 2014 Rev. June/2014
Operational Considerations
From Chapter 4 we can see that a wide variety of operations are
conducted by DP vessels. The operation being conducted
requires consideration when planning operations. Aspects of the
operation may require consideration with respect to the
DP system.
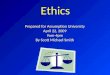
Example:
A vessel is to conduct DP operations where air divers are
to be deployed. When conducting such operations there are
safetyrequirements regarding how close the divers can get to oper
ational thrusters. Figure 10.2 shows a diagram which shows
maximumallowable umbilical lengths when divers are working at
various depths. Consulting this document during operational
planning mightindicate that the proposed vessel position would have
the divers working at an unsafe distance from the thrusters. Vessel
position orheading may have to be adjusted to provide a safe
distance. It may be determined that a particular thruster could not
be used duringthe operation. This might impact on vessel capability
or required redundancy.
MSV CHALLENGER SAT AND AIR DIVE
SAFE UMBILICAL LENGTHS
40m Diver Depth
30m Diver Depth
20m Diver Depth
10m Diver Depth
Air DiveBell Dive (Moonpool)
18m
20m
25m
32m
40m
27m
29m
34m
41m
48m
Thruster5m No Go Areas
Thruster5m No Go Areas
Depths
Below Sea Level
50m Diver Depth
49m
60m Diver Depth
56m
Maximum Umbilical Lengths Maximum Umbilical Lengths
Figure 10.2
Contingency Planning
Failures or emergency situations can occur at any time during a
DP operation. The planning process should include
contingency planning to cover procedures to be followed if the
operation does not go as expected.
An essential component of any DP operation is an escape route.
It is an identied and dened route away from any
hazards or nearby structures. It can also be known as an
emergency exit strategy which is a pre-planned route away from
hazards within any working area or worksite. There should always
be a planned escape route that positions the vessel at
a safe location in the event of a DP system failure. This should
include the approach to the worksite, conducting the DP
operation and the departure from the worksite. By having an
escape route planned in advance, there is no delay while the
DPO decides where to move the vessel and the safest route to get
there. An escape route that is planned in advance can be
thoroughly reviewed for problems. A plan that is formulated in
haste after the DP failure occurs may cause more problems
than it solves.
-
8/17/2019 Chapter10 - DP Operations
12/26
10-12 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Example:
A vessel is conducting DP operations close to a platform
and is in a blow on situation. The deployed ROV has connected a
load tothe crane wire and the load has just been lifted off the
bottom when a partial blackout occurs. Half of the vessels power
supply is lostalong with half of the thrusters. Redundancy had been
conrmed before commencing the operation and sufcient power and
thrustersremain online to hold the vessel on station. Power has
however failed to the crane and the load is suspended and cannot be
raised orlowered. Due to the fact that the vessel now has no
redundancy and is in a blow on situation, a decision is made to
move the vessel
to a location where it will drift clear if remaining power
fails. The fastest way to move the vessel to safety (the escape
route) is tomove astern. While making the move the suspended weight
on the crane hooks something on the seabed causing loss of heading
andnear contact with the platform. Before the vessel can be stopped
the crane wire parts and the load falls to the seabed where it
causesdamage to a pipeline.
A subsequent investigation determines that a new pipeline
had recently been laid from the platform. A hold back line usedto
commence the lay was run from the platform leg to the pipe and had
not been removed. This information was included indocumentation
sent to the vessel prior to commencement of the job. The supplied
information was not adequately reviewed during
planning for the operation and in this case, the escape
route was decided in haste after the problem occurred, without
considering allavailable information, resulting in vessel and eld
equipment damage.
At the point that the planned escape route is utilized, the
vessel may be experiencing reduced power or thrust capability.
The prospect of such reduced capability should be taken into
account as the vessel might not be capable of utilizing the
planned escape route.
Contingency plans should be altered as required to take into
account changes in conditions that occur while the DP
operation is being conducted. For example, weather conditions
may change or a vessel may arrive on location and be
positioned so as to block the planned escape route.
Contingency planning should also take the form of deciding what
action to take should a problem occur. The DPO at the
control desk should, as far as possible, preplan for things that
may go wrong. “Given the job at hand, what action will I
take if this particular fault or problem occurs?” would be the
sort of planning the DPO should undertake. Knowing what
you are going to do when a fault occurs saves valuable time and
may prevent incorrect decisions.
Example:
A thruster fails to full pitch. The DPO reviews available
information and determines that the thruster has failed to full
pitch. Having previously reviewed procedures for such a
problem, the DPO quickly shuts down the correct thruster minimizing
heading/positionexcursions.
The same problem occurs but this time the DPO has not
preplanned. After determining the fault the DPO must now decide
what actionto take. On making the decision to shut down the
thruster the DPO rushes to the thruster control panel and pushes
the emergency stop
All the buttons are close together on one panel and not
having reviewed the procedure, the DPO accidentally stops the wrong
thruster.The time taken to decide a course of action may have been
short, but it does allow for a greater heading/position excursions.
Stopping
the wrong thruster, while leaving the faulty one running, will
certainly compound the problem.
While on DP it is a good practice to note thrust and power
settings applied by the DP control system on an ongoing basis.
If a failure occurs which requires the DPO to resort to manual
control to hold the vessel on location, using either joystick
or individual thruster controls, the settings that were
previously being used are known. Thus, the DPO has a starting
point
regarding the amount of thrust to apply manually. Orientation of
the joystick is also important as a joystick or thrustercontrol
accidentally pushed the wrong way can move the vessel towards an
obstruction as opposed to being held in
position away from that obstruction.
It must be noted, that the reaction to a particular problem will
depend on the circumstances of the case and may not
always be the same. The DPO can never plan for all eventualities
but can plan for faults that occur with DP systems in
general and faults that could occur/have occurred on his/her
particular vessel.
-
8/17/2019 Chapter10 - DP Operations
13/26
© Marine Institute Centre for Marine Simulation 10-13
School of Maritime Studies 2014 Rev. June/2014
Checklists
A checklist is a pre-prepared list of tasks and checks to be
completed prior to commencing an operation or an individual
phase of an operation. Checklists ensure that the DP
system is working properly and it also ensures that there is a
standard
set of checks carried out by all DP operators on board the
vessel.
Checklists should be completed at various stages of the DP
operation. The type, frequency and content of the checklistswill
vary depending on the vessel and the type of operation. The “name”
of the checklist can vary from company to
company but the content and purpose of a checklist may be the
same.
A “Pre-DP” checklist is a checklist intended to be completed
immediately prior to transferring the vessel from
conventional navigation to DP control. There may be separate
Pre-DP checklists for bridge, and Machinery Control Room
A “Pre-operational” checklist is a checklist intended to be
completed once the vessel is established under DP control,
before commencing her operational tasks.
The following are some checklist types that might be
performed:
» When arriving at a new location and setting up on DP a
comprehensive “Field Arrival”, “New Location” or
“Pre- DP” checklist is completed. This may be completed even if
the new location is close to the old location. » Before
starting operations under DP control a “Pre-operational” checklist
is completed. Vessels involved in
different operations may have requirements for checklists at
certain times during the operation. On a dive
support vessel there would be a requirement to complete a
“Pre–operational” (perhaps called Pre-Dive”) DP
checklist before the diving bell or air divers are permitted to
enter the water.
» When DPOs change watch a “Change of Watch” DP checklist
is completed.
» At intervals (i.e. every 4 or 6 hours) during the watch
a “Watchkeeping” DP checklist is completed.
The following is an example of what a “Pre-Operational”
checklist for a dive support vessel might contain.
MSV Challenger Pre-Operational Checklist
Note: Add comments where required.
Date ____________________ Time ____________________
Location ____________________
Position N ____________________ E ____________________
Water Depth ____________________
Lights / Shapes (On/Up) Y / N
Read Latest Forecast Y / N
Lamp/Alarm Test Completed & O.K. Y / N
-
8/17/2019 Chapter10 - DP Operations
14/26
10-14 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
System Setup
Computer Online A B
Operator Station in Use 1 2
Centre of Rotation Selected ____________________
Speed Setting ____________________
Turn Rate Setting ____________________
Acceleration/Retardation Settings:
Low Speed Acceleration Factor Surge _____ % Sway _____ % Yaw
_____ %
Retardation Factor Surge _____ % Sway _____ % Yaw _____
%
High Speed Acceleration Factor Yaw _____ %
Retardation Factor Yaw _____ %
Gain (Select 1 of the 4 Below)
___ High Precision Gain Setting: Low Medium High
___ Customized High Precision Gain Setting: Surge _____
Sway ______ Yaw ______
___ Relaxed Outer Radius ____________
___ Green DP Outer Radius ____________ Inner Radius
____________
Joystick Thrust Reduced _____ Full _____
Joystick Precision High Speed _____ General _____ Low Speed
_____
Joystick Environmental Comp. Surge _____ Sway _____ Yaw
_____
DP Mode Standby _____ Joystick _____ Auto Position
_____
Auto Yaw _____ Auto Surge _____ Auto Sway _____
*Auto Pilot _____ *Auto Track _____
*Follow Target _____ *Trackline _____
* Before using, review specic settings for these modes and
complete checklists as required.
-
8/17/2019 Chapter10 - DP Operations
15/26
© Marine Institute Centre for Marine Simulation 10-15
School of Maritime Studies 2014 Rev. June/2014
Alarms
Alarms Page Checked Y / N
Position Alarm Settings Warning _____ Alarm _____ Enabled Y /
N
Heading Alarm Setting Warning _____ Alarm _____ Enabled Y /
N
Cross-Track Alarm Settings Warning _____ Alarm _____ Enabled Y /
N
Propulsion
Joystick Operational Y / N
Thrusters Available for DP Control #1 __ #2 __ #3 __ #4 __ #5 __
#6 __ #7 __
Thrusters Selected #1 __ #2 __ #3 __ #4 __ #5 __ #6 __ #7
__
Thruster #3 on Bus 1 __ Bus 2 __
Thruster Setpoint/Feedback O.K. Y / N
Rudders Available for DP Control Port __ Stbd. __
Rudders Selected Port __ Stbd. __
Rudder Setpoint/Feedback O.K. Y / N
Thruster Mode Selected
_____________________________________
Power Status
Generators Available #1 __ #2 __ #3 __ #4 __ #5 __ #6
__
Generators Online #1 __ #2 __ #3 __ #4 __ #5 __ #6 __
Main Switchboard Split Y / N
Power (if Bus is Common) Used ____________ Available
____________
Power (if Bus is Split) Bus 1: Used ____________ Available
____________
Bus 2: Used ____________ Available ____________
UPS Checked & O.K. Y / N
Sensors
Gyros Available #1 __ #2 __ #3 __
Gyro in Use #1 __ #2 __ #3 __
-
8/17/2019 Chapter10 - DP Operations
16/26
10-16 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Differences Checked & Acceptable Y / N
Vessel Heading in Use ____________ °
Wind Sensors Available #1 __ #2 __ #3 __
Wind Sensor in Use #1 __ #2 __ #3 __
Differences Checked & Acceptable Y / N
Wind Speed & Direction in Use
_____________________________________
VRS Available #1 __ #2 __ #3 __
VRS in Use #1 __ #2 __ #3 __
Differences Checked & Acceptable Y / N
Values Used Heave _____ Pitch _____ Roll _____
Draught Sensor Available Y / N
Draught Input Sensor __ Manua __ Operational __ Transit
__
Draught Input Checked & Acceptable Y / N
Draught in Use _____________________________________
Reference Systems
Available Selected
Artemis Y / N Y / N
DGPS 1 Y / N Y / N
DGPS 2 Y / N Y / N
Fanbeam Y / N Y / N Targets ____________ ____________
HPR 1 Y / N Y / N Transponders _____ _____ _____ _____
HPR 2 Y / N Y / N Transponders _____ _____ _____ _____
Radius Y / N Y / N Transponders _____ _____ _____ _____
Taut Wire Port Y / N Y / N
Taut Wire Stbd. Y / N Y / N
Gate Valves Port: Open / Closed Stbd.: Open / Closed
HPR Poles Port: Down / Up Stbd.: Down / Up
-
8/17/2019 Chapter10 - DP Operations
17/26
© Marine Institute Centre for Marine Simulation 10-17
School of Maritime Studies 2014 Rev. June/2014
ROV Transponder _____
Bell Transponder _____ Diver Transponder _____
Datum Settings Checked & O.K. Y / N
Communications Tested & O.K. (as applicable)
Crane Cab/Cabs Y / N
Dive Control Y / N DP Status Lights Y / N
Engine Control Room Y / N
ROV Control Y / N DP Status Lights Y / N
Checklists
Engineroom Checklist Complete Y / N
Dive Checklist Complete Y / N
ROV Checklist Complete Y / N
Vessel Capability
Trends Page Checked Y / N
Capability Plot Setup & Checked Y / N
Consequence Analysis Enabled Y / N
Deselect Thrusters #1, (#3), #5 & #7 (Only if thruster #3 is
connected to BUS 1)
Position Maintained Y / N Reselect Thrusters
Deselect Thrusters #2, (#3), #4 & #6 (Only if thruster #3 is
connected to BUS 2)
Position Maintained Y / N Reselect Thrusters
Vessel on Auto DP for 30 Minutes Y / N
DP Current _____________________________________
All Page Settings Checked Y / N
Printer Online Y / N Print Status Y / N
Signed _________________________________ Date
_________________________
Signed _________________________________ Date
_________________________
-
8/17/2019 Chapter10 - DP Operations
18/26
10-18 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Initial DP Setup
On arrival at the work location, the vessel will have to switch
from transit to DP mode. The main propellers and rudders
or the azimuth thrusters used for propulsion during transit may
also be used for DP. The engine room will be informed
of the intention to commence DP operations and any extra
thrusters required for DP will have to be started as per vessel
procedures. The thrusters should be tested manually to
ensure proper operation.
Any required load or reload of DP computers should be completed
before entering DP mode. The position reference
system or systems to be used for the operation (taking into
account factors discussed previously) should be checked
for readiness. Sensors (gyro, wind, motion and others as
required) would also be checked for readiness. Any gyro and
magnetic compass errors present to be determined.
The mathematical model requires time to build up, when rst
entering DP mode. Vessel position is likely to oscillate for a
period of time during this process. When entering DP mode,
there is no guarantee that all components of the DP system
are going to work properly. For these reasons the vessel should
be set up on DP at a location well away from anything
that the vessel might collide with because of position
oscillations or DP system failures. If the worksite is in open
water
with no obstructions in the area then the setup location can be
at or near the worksite. If there are obstructions near the
worksite (i.e. work location 15m from the side of a platform)
the setup should be completed at a distance well clear of
the obstruction. Depending on vessel and eld procedures this may
mean setting up outside the platform 500m exclusionzone. This a
dened area around an offshore structure or complex within which
vessel and other operations are within the
jurisdiction of the Offshore Installation Manager (OIM).
Commonly this exclusion zone is set at 500m but may vary.
When ready to enter DP mode the vessel is normally stopped and
control of the thrusters is switched from manual to DP
control and the thrusters are selected on the DP desk. Reference
systems, sensors and thrusters are enabled at the DP desk
as per system operating procedures. The DP joystick can now be
tested as part of the appropriate DP checklist required
when the vessel starts operations at a new location (see items
to be reviewed on sample checklist above).
It is important to remember that the vessel speed should ideally
be as close to zero as possible when entering Auto DP
mode. The same would apply for rate of turn. The possibility
exists to place surge, sway and yaw under DP control all
at once. If this is done and the vessel is moving the DP system
will attempt to stop the vessel at the current position and
heading. This can result in large amounts of thrust being used
and can, in some circumstances, result in partial or fullvessel
blackout depending on power consumed. A smoother transition can
usually be accomplished by entering DP one
step at a time. The vessel can be steadied on heading using the
joystick and the auto yaw selected. Next the speed in the
surge axis can be reduced to as close to zero as possible and
auto surge selected. Finally the same is accomplished with the
sway axis and when auto sway is selected full DP control is
enabled. On some DP systems surge and sway are switched
into DP together and cannot be manipulated independently. Some
DP systems have functionality that prevents entering
Auto DP mode when speed or turn rate is excessive. When
commanded to enter Auto DP mode, these systems will rst
slow the vessel to an appropriate speed and only then will the
mode be activated.
After the vessel is on full Auto DP, time is taken for the
vessel to settle down on position. The mathematical model will
build giving an indication of the DP current in the area.
As the current strength and direction becomes apparent, changes
may have to be made in the operational plan to reect the newly
obtained information. When making any changes it
should be noted that although the worksite is nearby, there is a
possibility that environmental conditions may not bethe same at
that location. The DP current in open water might be different than
at the platform due to environmental
interaction with the platform structure or subsea features.
Previously mentioned procedures can be utilized to determine
vessel capability and redundancy. Vessel redundancy can be
observed by putting the vessel on the desired working
heading and then simulating the worst case failure by
deselecting the appropriate thrusters. The observed vessel
performance may dictate that the heading previously chosen
for the worksite will put the vessel beyond its limits with
regard to the required level of redundancy. A new heading and/or
position for the worksite may have to be chosen or the
DP operation at hand may have to be postponed to await more
favorable conditions.
-
8/17/2019 Chapter10 - DP Operations
19/26
© Marine Institute Centre for Marine Simulation 10-19
School of Maritime Studies 2014 Rev. June/2014
Communications
Good communications between DP and all parties involved in the
DP operation are essential at all times. The means of
communication should, as a minimum, be duplicated to provide
backup in the event of system failure. Communications
systems used can consist of telephones, sound powered
telephones, talk back systems, UHF radios, VHF radios and DP
status lights (see below). With reliable communications all
parties involved in the operation can inform each other about
existing or planned changes in operational status. Modes of
communication should be checked for correct operation, before
commencing DP operations (often an item on DP checklists). Some
examples of two way lines of communication
to be established are as follows:
» DP and dive control (dive support)
» DP and ROV control (any vessel using ROV)
» DP and engine control (all vessels)
» DP and installation (all vessels in close proximity or
within 500 zone of platform)
» DP and drill oor (drilling vessels)
» DP and production control (oating production)
» DP and gangway control position (oating accommodation
platforms)
» DP and crane cab(s) (any vessel conducting lifting
operations)
» DP and ballast control ( heavy lift vessels)
» DP and lift control personnel (heavy lift vessels)
» DP and cargo/platform loading control (shuttle
tankers)
» DP and cable/pipe lay personnel (cable/ pipe lay
vessels)
» DP and tension control (cable/pipe lay vessels)
» DP and trencher/plow control (cable/pipe lay
vessels)
DP Alert Levels
On a DP vessel, there may be a system of alert levels to
indicate the status of the DP system. An example of alert
levels
might be as follows:
Green - normal operational status, adequate equipment is
on line to meet the required
performance within the declared safe working limits.
Yellow - degraded operational status; with the equipment
on line, safe working limits are
being exceeded but a loss of position is not taking place
and should not take place
unless there is another fault, failure or mistake.
Red - emergency status; there is a loss of position, or
position loss is inevitable.
Some vessels have an additional Blue or White advisory level
between Green and Yellow.
Alarms indicating status are visual (lights) and depending on
status level (Red) audible. The exact meaning of each alert
level and the procedures to be followed in the event of a
particular level will vary depending on the type of
operation being conducted.
-
8/17/2019 Chapter10 - DP Operations
20/26
10-20 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Worksite Approach
After the vessel position has settled the approach to the
worksite can begin. We will assume for this example that the
worksite is located 15m from the side of a platform and that up
to this point the vessel is within required capability
limits. Having obtained permission to enter the 500m zone, the
vessel has been set up on DP at a distance of 300m from
the platform (see Figure 10.3). Vessel heading has been set to
that required at the nal work location. The approach is to
be made on Auto DP from this distance. The vessel will
approach using a series of short position moves as opposed tomaking
one move which places the vessel directly at the worksite. A few
minutes settling time between moves will allow
the mathematical model to update for the new location. Initially
a series of 50m moves are used. When getting close to
nal position (about 50m) the moves are reduced to 10m at a time
with the nal few moves at 5m each. During the nal
moves, close to the platform, vessel speed should be kept slow
at 0.2-0.3 knots. The low speed will minimize overshoots
when arriving at a new position, reduce thrust used to stop the
vessel at the position and make it easier to stop the vessel
should problems occur. As the vessel moves towards the platform,
fore/aft position is adjusted to align the vessel with
desired work location.
Entering 500m Zone
Transfer Control to DP Desk
Joystick Control
Auto DP
Moving Towards Worksite
Moving Astern to
Align with Worksite
Reduce Speed and
Length of Moves
Auto DP at Worksite
Wait 30 Minutes
to Build the ModelA
B
Figure 10.3
-
8/17/2019 Chapter10 - DP Operations
21/26
© Marine Institute Centre for Marine Simulation 10-21
School of Maritime Studies 2014 Rev. June/2014
Additional position references will be deployed as required
during the approach to the platform. Client/company/eld/
vessel requirements as well as industry practice will dictate
the number of position reference systems required for a
particular job. The vessel might be set up on DP using a
minimum number or references (perhaps only DGPS) due
to system availability. HPR beacons deployed at the setup
location might be out of range at the worksite. Taut wires
will have to be deployed closer to the worksite because of wire
angle limitations. If HPR and/or taut wire are required
references during approach they may be walked along using a
series of replumbs when beacon distance (HPR) or angle
(taut wire) limits are reached. The Artemis x station, Fanbeam
reector or RADius transponder may not be visible fromthe setup
location or perhaps they have to be transferred from the vessel to
the platform when closer in. The minimum
number of required references for a given stage of the operation
should always be deployed. Standby references, if
available, should be ready if one fails. Using more than the
minimum required references is good practice. The greater
number of good quality references online, the less chance that
the failure of one will have a serious inuence on vessel
positioning capability. Deploying references with possible
common mode failures should be avoided. Two DGPS systems
using the same receiving antenna or using a common software
package are subject to single point failures. Three HPR
beacons used in SSBL mode are subject to single point
failure from a single subsea noise source.
During the approach a visual lookout should be kept both as a
check of vessel progress and to alert the DP operator to
unforeseen problems which might develop. This might be due to
supplied worksite information being insufcient (i.e. a
helideck or are tower which is not on the plans). It could be
crane operations which have the crane swinging loads over
the worksite. There may be unreported vessel trafc in the area
or reported vessels that are not where they are supposed
to be. Vessel progress may also be monitored on an electronic
chart/survey spread (if tted). Care should be taken that the
information displayed is accurate and up to date.
Worksite Setup
The mathematical model is constantly updated from the point that
the vessel is under manual control at the DP console.
The optimum mathematical model is achieved when the vessel is
stopped at one location. After arriving at the worksite the
vessel should be allowed to settle for at least 30 minutes to
allow the mathematical model to update fully. Before a green
light is given to commence operations (diving, ROV, pipelay,
etc.) the following have to be considered:
» Has the vessel model had sufcient time to build at this
location? » Note position/heading deviations and determine if
there are within acceptable limits for the operation to be
conducted.
» Ensure that gain settings are appropriate for the
conditions.
» Ensure that sufcient reference systems are online and that
their performance has been checked and found to
be acceptable.
» Vessel capability and redundancy must be reconrmed.
» Check wind sensors to ensure proper selection and that
readings reect actual wind. Readings that were
correct away from the platform may now have induced errors
caused by wind interaction with the platform
structure.
» Recheck gyro and magnetic compass readings.
» Review and analyze any DP system alarms. » Complete
applicable checklist.
When all checks have been completed and all is in readiness
(with regard to DP) a “green light” can be given for
operations to commence.
-
8/17/2019 Chapter10 - DP Operations
22/26
10-22 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
Conducting Operations
While the DP operation is underway the vessel may be stopped at
one location or moving as per the requirements of the
job. The DPO is to monitor the DP system and ensure that
operations are conducted in a safe and efcient manner.
Any required heading or position moves while on DP, are to be
conducted at a speed that is safe for the operation at hand
(moving at 3 knots with an ROV in the water that has a maximum
speed of 2 knots is not acceptable). A 5m move to portwith the same
1 knot speed that was used a short time ago for a 500m move
straight ahead might result in a 5m overshoot
past the setpoint, in addition to large amounts of thrust
required to start and stop the vessel as well as settle it down on
the
new position. A rate of turn which is beyond the turning
capability of the vessel in the present conditions may result in
the
system putting so much effort into the heading change that the
vessel drifts off position (system priority on heading).
The required levels of redundancy must be maintained at all
times. Without redundancy the vessel is subject to loss of
position if a fault in a critical component fails. When
lack of redundancy is detected the DPO should take immediate
action to correct the problem. This might involve starting extra
generators or thrusters. It could involve changing the
position or heading of the vessel. Stopping the operation
at hand and moving the vessel to a safe location may be the
appropriate action, if redundancy cannot be regained.
Example:
A Class 2 dive support vessel with divers deployed has a
partial blackout. The bus is split and half the vessels power
supply is stillavailable. Adequate redundancy was available prior
to the failure and the vessel maintains station. Divers should be
immediatelyrecalled to the bell and recovered until such time as
the problem can be xed. The job is almost nished and the divers
only require a“few” minutes to collect their tools. The vessel will
then be free to proceed to the next job location. A decision
(incorrect) is made toallow the divers to collect their tools and
during those “few” minutes more problems develop which result in a
further loss of power.Unable to hold station, the vessel drifts,
dragging the divers with it. Successful recovery of the divers is
now largely based on goodluck. Hopefully they can get safely back
to the bell and recover to deck before they or the bell become
entangled in subsea obstructionslocated in the area. Obstructions
that were at a safe distance when the vessel was on station with
full redundancy now become a
hazard to the divers.
Vessel performance (heading & position) must be constantly
monitored to ensure that deviations stay within acceptable
limits. Gain settings may have to be altered to take into
account changes in environmental conditions.
Monitoring and controlling vessel’s motion (i.e. changing
heading to reduce rolling) may be required for some jobs. This
might include reducing rolling when heavy loads are moved on
deck using the vessel’s crane, launching an ROV over the
side or limiting motion to the point where a helicopter is able
to land.
All alarms are to be investigated and action taken as
appropriate to correct any problems indicated by the alarms.
Position references are to be monitored on an ongoing basis to
ensure correct operation and action taken to ensure that the
minimum number of required references, are always online.
Power consumption is monitored and generators not required may
be shut down to save on fuel. Thrusters not required
may also be shut down to save on equipment wear. Any shutdowns
should be made taking into consideration the required
level of capability and redundancy.
Worksite Departure
When the job is completed the vessel will switch from DP to
manual control and steam to the next jobsite or port as
required. If the vessel is working in open water with no
obstructions nearby the switching procedure can be followed and
the vessel can steam away. If the vessel is located close to an
obstacle (such as a platform) it should be moved to a safe
-
8/17/2019 Chapter10 - DP Operations
23/26
© Marine Institute Centre for Marine Simulation 10-23
School of Maritime Studies 2014 Rev. June/2014
distance under DP control before going to manual mode. Safe
distance will depend on weather conditions and on the skill
of the DPO to control the vessel in manual mode.
Example:
A vessel is 20m from the side of a platform. Subsea
operations are complete and the vessel is clear in all respects to
depart. Thevessel is switched to joystick mode by the DPO with the
intention of moving away under manual control. Shortly afterwards
the vessel
strikes the platform, maybe due to the DPO not having
adequate knowledge of the operating characteristics of the vessel
in joystickmode (lack of practice). Perhaps he initially pushed the
joystick the wrong way (lack of system knowledge) and could not
correct forthe mistake in time. Possibly environmental conditions
were such that switching from computer to manual at such close
proximity(irrespective of operator skill) was simply not
advisable.
Before departing from the work location checks must be completed
to ensure that all is in readiness for the departure. The
subsea work might be completed but the diving bell might not yet
be back onboard. Lines used to transfer tools to the
divers on the bottom may not be completely out of the water. The
ROV might not be back on deck and secured. Crane
operations might be ongoing that would be adversely affected by
a change in vessel heading as it steams away from
location.
Vessel position references will have to be recovered depending
on type in use (Artemis x station, Fanbeam reector/s,
HPR beacons or Taut Wire, etc.). However, sufcient references
must remain online until the vessel is ready to switch outof DP
mode. HPR poles must be retracted before vessel speed rises to the
point where they could be damaged.
Manning
The DP desk should be manned at all times while the vessel is
under DP control. The majority of DP operations are
conducted with at least two DP operators on the bridge or
manning the DP control room. For some operations that require
no redundancy (i.e. vessel using DP to follow an ROV doing a
pipeline inspection in open water) there may be only one
DPO on watch at a time. When two DPOs are present, one should be
totally dedicated to the DP console and the DP
operation. The other would carry out other bridge duties (i.e.
radar/visual lookout, non DP communications, issue of work
permits, etc.). The two DPOs should normally alternate an
hour on the desk and an hour off.
Long periods of calm with little activity can occur during some
DP operations. When DP operators are not required
to make vessel moves and are not actively involved in the
vessel’s operations, there is the possibility of lapses in
concentration where the DPO is not fully aware of the status of
the ongoing operation and of the current operation of the
DP system. Alternating DPOs at the DP desk every hour will help
to avoid this problem. It is equally important to change
hourly when operations are more hectic as fatigue could become a
problem over the course of a 12 hour watch.
The DP control area should be free from distractions and
inuences which take the DPO’s attention away from the DP
system (i.e. conversations carried out by personnel having
nothing to do with the ongoing operation).
Watch Handover
Before taking over a DP watch, the DPO must be fully aware of
all aspects of the operation. If there are 2 DPOs on awatch it
would be good practice not to have both change watch at the same
time. If the 4 DPOs on the vessel are doing
12 hour watches, watches could be changed at 0600, 1200, 1800
and 2400. This would mean that at least 1 DPO would
always be on the bridge who has current knowledge of the
situation (having come on watch 6 hours previous).
Information to be passed over by the departing DPO and obtained
by the one coming on watch would vary depending on
the operation but would include the following:
-
8/17/2019 Chapter10 - DP Operations
24/26
10-24 Centre for Marine Simulation © Marine Institute
Rev. June/2014 School of Maritime Studies 2014
» What is the status of the operation (i.e. Diving
Operations: Are the divers down? What is the current position
of the divers? What are they doing? What their future plans?
etc. Pipe Lay: What is the planned route? What
vessel speed is being used? Is the vessel currently moving or
stopped? etc.)?
» How has the DP system been performing and have there
been any problems?
» How is the DP console set up (DP mode selected, gain
settings, screen options, etc.).
» What position references are in use and how have they
been performing?
» Are all thrusters/propellers/ rudders available and how
are they performing? » What is the situation regarding power
supply?
» Is the vessel meeting redundancy requirements (if
applicable)?
» What are the current weather conditions and what is the
latest forecast?
» What is the DP current and how has it changed over the
course of the watch?
» What has been the position keeping performance of the
vessel?
» Are there any new orders, notices to mariners, etc., of
which the DPO coming on watch is unaware?
The DPO coming on watch should complete a checklist to gain
situational awareness regarding DP system settings and
current system performance.
Logs
A log must be kept of all aspects of the DP operation. All
required information may not be recorded on the printer/s
connected to the DP system. Information manually logged would
include but not be limited to the following:
» Times of starting and stopping DP operations as well as
signicant events during the operation. (i.e. time
ROV was off deck, time diving bell left the surface, time
shuttle tanker disconnects from loading buoy, times
for temporary stop of loading crude due to weather, etc.)
» Any operator input changes of heading or position while
on DP.
» Deploying or recovering of position references.
» Starting or stopping of thrusters or generators.
» Any problems encountered with the DP system. »
Changes in system status with regard to redundancy/vessel
capability.
» Movements of other vessels in the area.
Logs can provide a record of evens to be referred to during the
investigation of an accident. Times of starting and stopping
DP operations may be used to settle nancial disputes with
charterers. Records of encountered problems may help
technicians when repairing the DP system. These are some of the
uses of the information recorded in the DP log.
Some DP systems provide the ability to save trend graphs to disk
for future reference. A DP system with a data logger
function may save system operation and status information to an
external computer for future reference.
-
8/17/2019 Chapter10 - DP Operations
25/26
© Marine Institute Centre for Marine Simulation 10-25
School of Maritime Studies 2014 Rev. June/2014
DP Printers
An aid to accurate log keeping are print outs from the DP
system. An example of a DP system print out is shown
following. This is a print out from a shuttle tanker equipped
with two bow thrusters, two main props, and two rudders.
A 12:42:33 17 SEP 2012 Current CP position E 671114.3 N
5179077.2
A 12:42:33 17 SEP 2012 SIMRAD (10) PME selectedA 12:42:37 17 SEP
2012 Set Heading = 50.0 degrees
A 12:42:52 17 SEP 2012 Set Heading = 49.9 degrees
A 12:43:10 17 SEP 2012 Current CP osition E 669114.5 N
5179007.1
A 12:43:10 17 SEP 2012 SIMRAD (11) PME selected
A Alarm 12:43:32 17 SEP 2012 Thruster 1 high thrust warning
A Alarm 12:43:32 17 SEP 2012 Thruster 2 high thrust warning
A Alarm 12:43:32 17 SEP 2012 Stbd Main Prop high thrust
warning
A Alarm 12:43:32 17 SEP 2012 Port Main Prop high thrust
warning
A 12:43:45 17 SEP 2012 Stbd Main Prop high thrust warning OK
A 12:43:45 17 SEP 2012 Port Main Prop high thrust warning OK
A Alarm 12:44:00 17 SEP 2012 Con. analysis: Thruster failure
critical
A Alarm 12:44:02 17 SEP 2012 Con. analysis: Bus section failure
criticalA Alarm 12:44:27 17 SEP 2012 SIMRAD (10) PME failed
A Alarm 12:44:27 17 SEP 2012 Current CP position E 671113.1 N
5179077.6
A 12:44:27 17 SEP 2012 SIMRAD (10) PME deselected
A Alarm 12:44:30 17 SEP 2012 Mismatch between PME/sensor
selections
A 12:44:35 17 SEP 2012 Mismatch between PME/sensor selections
OK
A 12:44:38 17 SEP 2012 Thruster 1 high thrust warning OK
A 12:44:38 17 SEP 2012 Thruster 2 high thrust warning OK
A 12:44:49 17 SEP 2012 Current CP position E 671114.6 N
5179077.4
A 12:44:49 17 SEP 2012 ARTEMIS PME selected
A Alarm 12:45:10 17 SEP 2012 Thruster 1 high thrust warning
A Alarm 12:45:10 17 SEP 2012 Thruster 2 high thrust warningA
12:45:33 17 SEP 2012 Set Heading = -4.2 degrees
A 12:46:31 17 SEP 2012 Con. analysis: Bus section failure not
critical
A 12:46:33 17 SEP 2012 Con. analysis: Thruster failure not
critical
A Alarm 12:46:40 17 SEP 2012 Ofoading position warning
A 12:46:47 17 SEP 2012 Thruster 1 high thrust warning OK
A 12:46:47 17 SEP 2012 Thruster 2 high thrust warning OK
A Alarm 12:47:08 17 SEP 2012 Stbd Main Prop high thrust
warning
A Alarm 12:47:08 17 SEP 2012 Port Main Prop high thrust
warning
A Alarm 12:47:35 17 SEP 2012 Con. analysis: Thruster failure
critical
A Alarm 12:47:45 17 SEP 2012 Con. analysis: Bus section failure
critical
A Alarm 12:48:10 17 SEP 2012 Thruster 1 pitch feedback fault
A Alarm 12:48:10 17 SEP 2012 Thruster 2 pitch feedback faultA
12:48:16 17 SEP 2012 Thruster 1 pitch feedback OK
A 12:48:16 17 SEP 2012 Thruster 2 pitch feedback OK
A 12:48:56 17 SEP 2012 No Push-Pull mode selected
A Alarm 12:49:47 17 SEP 2012 Anemometer 1 failed
A 12:49:47 17 SEP 2012 Anemometer 1 deselected
A 12:50:00 17 SEP 2012 Console B selected
-
8/17/2019 Chapter10 - DP Operations
26/26
10 26 Centre for Marine Simulation © Marine Institute
Notes