Embed Size (px)
Citation preview

CHARACTERIZATION OF ACOUSTIC EMISSION
SIGNALS FROM M O D E I CRACK
By Laurence J. Jacobs,1 Associate Member, ASCE
ABSTRACT: Separation of crack growth signals is of fundamental importance for detecting, locating, and determining the significance of an internal flaw using acoustic emission techniques. The methodology used to determine the acoustic emission signal in this paper incorporates a source model that is an actual crack propagation and arrest event. This source model includes the effects of the following physical parameters: location of the crack, crack orientation, crack tip velocity, duration of crack propagation, and mode of fracture. The integral equation method is used to examine a semi-infinite crack in an infinite, linear elastic body loaded under the conditions of plane strain. The dynamic mode I stress caused by a crack propagating with a prescribed velocity is determined, and then the displacements at any point are calculated. These time-dependent displacements are the analytical form of the acoustic emission waveforms. Numerical results examine the effect of crack tip velocity, duration of propagation, and distance from the crack source to the point of observation on the calculated acoustic emission signals.
INTRODUCTION
Acoustic emission testing is used today to evaluate and monitor structural components. The technique offers a distinct advantage over more conventional nondestructive testing techniques because it allows for the real-time monitoring of in-service structures. To be effective, acoustic emission techniques must be able to identify the location of an arbitrary source and to characterize the severity of the damage events emanating from a defect. The difficulty in the application of acoustic emission techniques to locate and detect these damage events from a source within an infinite body is in interpreting and categorizing the large quantity of data and in removing the erroneous information. Separation of crack propagation signals is of fundamental importance for detecting, locating, and determining the significance of a damage event.
The methodology used here for tracking the acoustic emission signal from a damage event in an infinite body incorporates a source model that is an actual crack propagation and arrest event. This source model is not a "simple" point source, but rather one that includes the effects of the following physical parameters: location of the crack, crack orientation, crack tip velocity, duration of crack propagation, and mode of fracture. An analytical model is used to determine the acoustic emission signal from a dynamic crack growth event at a prescribed location, orientation, and velocity profile. The propagation of this crack greatly influences the stress field in the vicinity of the crack tip, causing stress waves to radiate into the body and on the crack surface; it is the displacement caused by these stress waves that is being modeled.
The problems of dynamic crack propagation have been the subject of numerous investigations in the past several years, including Freund (1985) and
'Asst. Prof., Engrg. Sci. and Mech. Program, School of Civ. Engrg., Georgia Inst, of Tech., Atlanta, GA 30332.
Note. Discussion open until January 1, 1992. To extend the closing date one month, a written request must be filed with the ASCE Manager of Journals. The manuscript for this paper was submitted for review and possible publication on November 2, 1990. This paper is part of the Journal of Engineering Mechanics, Vol. 117, No. 8, August, 1991. ©ASCE, ISSN 0733-9399/91/0008-1878/$1.00 + $.15 per page. Paper No. 26101.
1878
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

Rose (1976). The preceding works have primarily been conncerned with the determination of the dynamic stress field in the vicinity of the moving crack tip. They did not examine the affect of the propagation and arrest of the crack tips throughout the entire body. Freund (1972) determined the pressure discontinuity radiating out from a crack tip when the crack, which is initially at rest, begins to grow. Rose (1981) calculated explicit formulas for the stress discontinuities radiated by a suddenly starting two-dimensional crack under tension, for application to acoustic emission testing. Achenbach and Harris (1979) examined the acoustic emission signals from a semi-infinite crack of arbitrary shape using the elastodynamic ray theory. The problem has also been considered from a seismological orientation by Brock (1975) and Niazy (1973), who investigated the displacements caused by a propagating crack.
Previous investigators worked to identify the acoustic emission signal from a crack propagation and arrest source. Summaries of this work appear in Eitzen and Wadley (1984) and Pao (1978). Ceranoglu and Pao (1981a-1981c) examined the propagation of an acoustic emission signal in an elastic plate. These solutions are based on the generation and propagation of elastic waves in a wave guide. They provide numerical results for the surface displacements for a variety of dynamic nuclei of strains, including concentrated forces and couples. Kim and Sachse (1986a-1986c), Ohtsu and Ono (1986), Ohtsu (1989), and Enoki and Kishi (1989) investigated both the analytical and experimental signature of an acoustic emission waveform, using point source models.
In this paper, the dynamic mode I stress caused by a semi-infinite crack propagating with a prescribed velocity is determined, and then the displacements at any point are calculated. These time-dependent displacements are the analytical form of the acoustic emission waveforms. The first step of this analysis uses an influence function to formulate an integral equation that expresses the boundary conditions in the plane of the crack, following Jacobs and Bieniek (1990). The steps for the calculation of the dynamic stresses are as follows:
1. Determination of the influence function (or Green's function) of the problem, which is the dynamic displacement of an elastic half-space subjected to a unit-concentrated impulse acting at the point of, and normal to, its edge.
2. Formulation of the integral equation of the problem. This integral equation, with the influence function as the kernel and the normal stress in the plane of the crack as the unknown function, expresses the boundary conditions in the plane of the crack—a stress-free crack surface and continuity of displacements outside of the crack.
3. Solution of the integral equation.
The displacement at any point within the infinite body is determined using the previously calculated dynamic stress and two new influence functions. Convolution integrals are written to calculate the vertical and horizontal components of the displacement, as a function of time, for any point (x,y) within the body. These displacements are the calculated acoustic emission waveforms. The effects of crack tip velocity, duration of propagation and location of the crack tip are examined in detail and the results can be used to represent the acoustic emission signal from a crack at a prescribed location and orientation that grows with a certain velocity profile.
1879
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

CALCULATION OF THE DYNAMIC STRESSES
The integral equation method is used to examine a semi-infinite crack in an infinite linear elastic body, loaded under the conditions of plane strain, by a symmetric, far field static stress, P0. The integral equation, in terms of the unknown tractions in front of the moving crack tip, is formulated using an influence function. This function is defined as the vertical surface displacement U*y (x — x', t - t') due to the surface traction at y = 0 of
Py(t) = b(x - x'Mt - t'), Px = o (l)
The solution is obtained, following Achenbach (1973), using integral transform techniques, and the inversion is performed using the Cagniard-de Hoop method.
To formulate the integral equation, assume a crack exists at time t = 0 with its tip located at x = a(0) and y = 0. For time t > 0, the crack moves from x = a(0) to x = a(t). The two relevant boundary conditions are that the newly formed crack faces are stress-free and that the vertical displacement in front of the moving crack tip is zero. Both of these boundary conditions are met by:
1. Removing the existing known static stress, (Jyy = P(x), and assuming that instead a new, unknown time-dependent stress, ayy = F(x,t), develops.
2. Requiring that the new stress distribution be such that there is vertical displacement continuity in front of the moving crack tip.
The continuity boundary condition can be expressed in terms of the influence function, U* (x - x', t — t'), as
-u: P(x')Uyy(X ~x',t- t')dx'dt'
+ F(x',t')U*y(x - x',t- t')dx'dt' = 0 (2) Jo J-»
for |x| a a{i) and t > 0. The aforementioned is a Volterra integral equation of the first kind in the variables x and t. Due to the presence of step functions in the influence function, the °° limits in the x' integration are replaced by the distance that the fastest wave will travel in the elapsed time, t — t'.
To provide a solution to this integral equation, assume some spatial form of the unknown stress distribution, F(x',?'). that contains a square-root singularity as it approaches its tip location, a{t'). This unknown stress in front of the moving crack tip is assumed to have the spatial form of a static crack with its tip located at a(t'), multiplied by some unknown time function, K(t')
K(t')x' F(x',t') = — = (3)
V{x'f - [a(t')f
It should be noted that the assumed spatial stress distribution approaches the "traditional" square-root singularity [ 1 / v V _ a(t')] associated with the stress intensity factor as x' —> a{t'). With the assumption of the spatial distribution given by (3), the integral equation, (2), cannot be exactly satisfied for all |x| > a(t). The function K{f) will be determined from the condition that (2) holds for x = a(t).
The direct quadrature method, shown in Baker (1977), is used for the
1880
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

solution of the integral equation. There are, however, two refinements that are necessary in the numerical solution of the integral equation. The first refinement is a "subdivision" of the time step, At, in the evaluation of the numerical integrations, while the second is a midpoint product integration scheme of Weiss and Anderssen (1972), which is employed to handle the singularity of the kernel at t = t'. For the steady state case of a crack propagating with a constant velocity, the calculated value of K(i) is a constant that is only a function of the crack tip velocity. As the crack tip speed increases, the corresponding constant value of K(t) will decrease. The results for the case of a crack that suddenly stops after propagating is that the calculated value of K(t) discontinuously jumps to the value of the corresponding static stress; there is no transition zone and the stress never increases above the value for the equivalent static crack as shown in Jacobs and Bieniek (1990). These results agree with those of Freund (1985) and Rose (1976).
CALCULATION OF THE DISPLACEMENTS
The displacement at any point within the infinite body is determined using the previously calculated dynamic stress, F(x,t) and two new influence functions Ujyix — x', y, t — t') and Uyy(x - x', y, t — t'). These influence functions represent the horizontal displacement ux and the vertical displacement uy, respectively, at any point (x,y) within an elastic half-space that is subjected to a vertical unit impulse surface loading at x' as given by (1). The solution for these influence functions is again obtained following Ach-enbach (1973). Using the previously calculated dynamic stress distribution, convolution integrals are written to calculate the vertical and horizontal displacement as a function of time for any point (x,y) within the body. At this point, the displacements are given by
ux(x,y,t) = - I P(x')U*y(x - x', y, t - t')dx'dt' Jo J—»
F(x',t')Uxy(x - x'> y> t - t')dx'dt' (4)
f c uy(x,y,t) = - I P{x')Uyy(x - x', v, t - t')dx'dt'
+ F{x'j'Wyyix - x', y, t - t')dx'dt' (5) Jo J-»
These integrals represent the displacements due to the removal of the static stress, P(x'), and its replacement with the now known time-dependent stress, F(x',t'). This stress distribution is shown in Fig. 1. As is the case in the evaluation of (2), the °° limits in the x' integration are replaced by the distance that the fastest wave travels in the elapsed time, t — t'. For numerical simplicity, the displacement will be calculated at a point x, in the plane of the crack (y = 0). These displacements are given as
ux(x,t) = - J Pix'yUxyix - x', y = 0, t - t')dx'dt' [Continued]
1881
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

a{t)
o(0)
V
I 0
\ J Uyy — I1 (X, t)
— — 1
w = -Ps(x)
FIG. 1. Stress Distribution due to Removal of Static Stress, P(x), and Its Replacement with Time-Dependent Stress, F(x,t)
F(x' j'W^x - x'.y = 0,t - t')dx'dt' (6)
uy(x, t) = 0 (because of symmetry) (7)
For completeness and to clarify the solution procedure, the relevant influence function (y = 0) is given, by letting s = (t — t')/\x — x'\, as
U„ 0 for s < sL
U„ = si 2sVs Sl Vs2
T - *2 (Si • 2s2) ""
.(£ 2s2f + I6s\s2 |xir|jr - x |
for sL < s s .y,.
U*> = ~ T\ U(S*W\S ~~ SK\) f o r s> sT
ti)(4 - s2).
\JL\X
(8a)
(8fc)
(8c)
with
U(sR) = sT(sT 2sK)
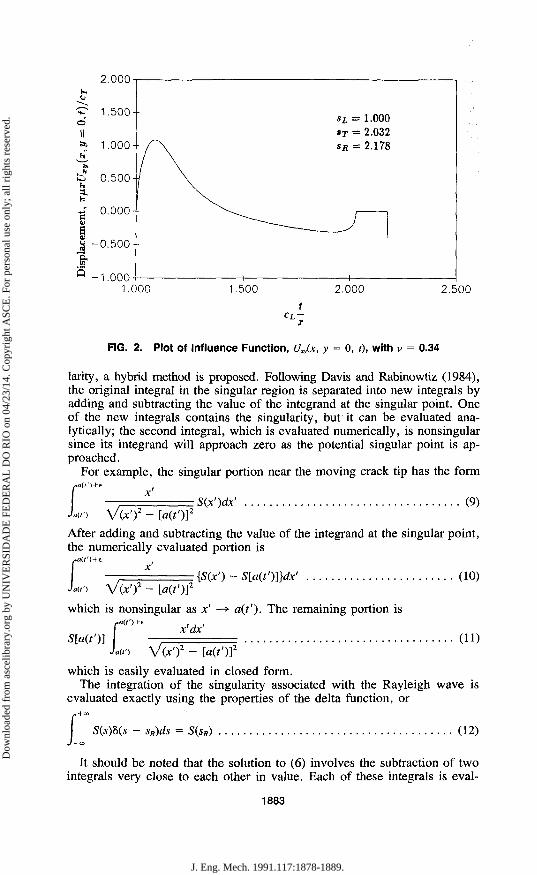
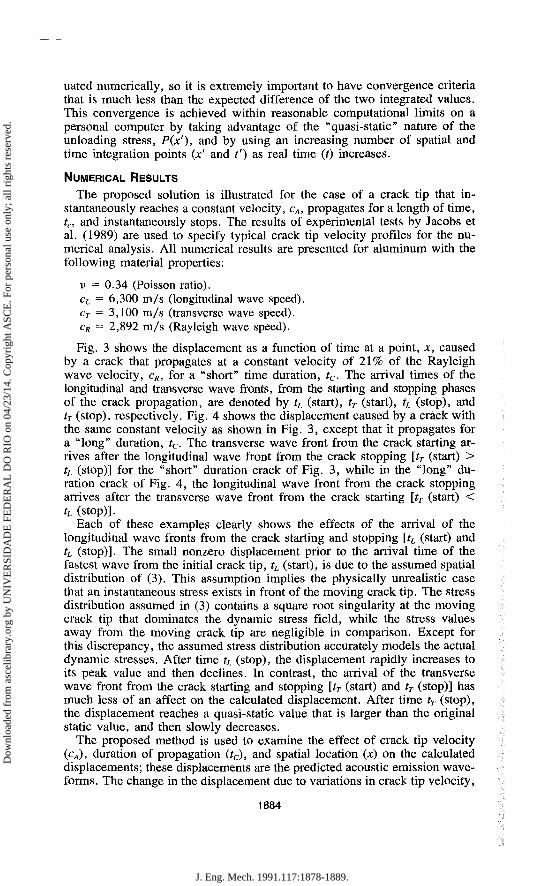
4[8(4 - sM - 444 + 4] where sL, sT, and sR = the slownesses (inverse of the wave speeds) of the longitudinal, transverse, and Rayleigh waves, respectively. The influence function is illustrated in Fig. 2. Except for a delta function singularity traveling at the Rayleigh wave velocity, this influence function is nonzero only between the arrival of the longitudinal and transverse waves, or when sL s s s sT.
The integrals in (6) are evaluated numerically. Difficulties arise in the x' integration due to both the integrands' complexity and the presence of singularities. There are singularities of different strengths and discontinuities associated with the moving crack tip, the original crack tip and the various wave fronts. Each of these singularities must be investigated separately to properly evaluate the integrals. To avoid numerical problems, the integration technique used involves separating the x' integration interval into singular and nonsingular regions. To evaluate the integral in the area of the singu-
1882
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.
2.000
t , 0.500 a.
~ 0 .000 -a
0 QJ U
H (A
s -1 .000 1.000
sL = 1.000 « r = 2.032 sR = 2.178
1.500 2.000
t CL-
2.500
FIG. 2. Plot of Influence Function, ujx, y = 0, /), with v = 0.34
larity, a hybrid method is proposed. Following Davis and Rabinowtiz (1984), the original integral in the singular region is separated into new integrals by adding and subtracting the value of the integrand at the singular point. One of the new integrals contains the singularity, but it can be evaluated analytically; the second integral, which is evaluated numerically, is nonsingular since its integrand will approach zero as the potential singular point is approached.
For example, the singular portion near the moving crack tip has the form .«(/') + € ,
S(x')dx' (9) '«</•> W 7 ) 2 - [a(t')f
After adding and subtracting the value of the integrand at the singular point, the numerically evaluated portion is
J.o(/') + e
V(*')2 - [a{t')f {S(x') - S[a(t')]}dx' (10)
which is nonsingular as x' —» a{t'). The remaining portion is
/ x ax S[a(t')] - (11)
J*') V(x')2 ~ [a{t')f
which is easily evaluated in closed form. The integration of the singularity associated with the Rayleigh wave is
evaluated exactly using the properties of the delta function, or
f S(s)b(s - sR)ds = S(sR) (12)
It should be noted that the solution to (6) involves the subtraction of two integrals very close to each other in value. Each of these integrals is eval-
1883
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.
uated numerically, so it is extremely important to have convergence criteria that is much less than the expected difference of the two integrated values. This convergence is achieved within reasonable computational limits on a personal computer by taking advantage of the "quasi-static" nature of the unloading stress, P(x'), and by using an increasing number of spatial and time integration points (x' and t') as real time (0 increases.
NUMERICAL RESULTS
The proposed solution is illustrated for the case of a crack tip that instantaneously reaches a constant velocity, cA, propagates for a length of time, tc, and instantaneously stops. The results of experimental tests by Jacobs et al. (1989) are used to specify typical crack tip velocity profiles for the numerical analysis. All numerical results are presented for aluminum with the following material properties:
v = 0.34 (Poisson ratio). cL = 6,300 m/s (longitudinal wave speed). cT = 3,100 m/s (transverse wave speed). cR = 2,892 m/s (Rayleigh wave speed).
Fig. 3 shows the displacement as a function of time at a point, x, caused by a crack that propagates at a constant velocity of 2 1 % of the Rayleigh wave velocity, cR, for a "short" time duration, tc. The arrival times of the longitudinal and transverse wave fronts, from the starting and stopping phases of the crack propagation, are denoted by tL (start), tT (start), tL (stop), and tT (stop), respectively. Fig. 4 shows the displacement caused by a crack with the same constant velocity as shown in Fig. 3, except that it propagates for a "long" duration, tc. The transverse wave front from the crack starting arrives after the longitudinal wave front from the crack stopping [tT (start) > tL (stop)] for the "short" duration crack of Fig. 3, while in the "long" duration crack of Fig. 4, the longitudinal wave front from the crack stopping arrives after the transverse wave front from the crack starting [tT (start) < k (stop)].
Each of these examples clearly shows the effects of the arrival of the longitudinal wave fronts from the crack starting and stopping [tL (start) and tL (stop)]. The small nonzero displacement prior to the arrival time of the fastest wave from the initial crack tip, tL (start), is due to the assumed spatial distribution of (3). This assumption implies the physically unrealistic case that an instantaneous stress exists in front of the moving crack tip. The stress distribution assumed in (3) contains a square root singularity at the moving crack tip that dominates the dynamic stress field, while the stress values away from the moving crack tip are negligible in comparison. Except for this discrepancy, the assumed stress distribution accurately models the actual dynamic stresses. After time tL (stop), the displacement rapidly increases to its peak value and then declines. In contrast, the arrival of the transverse wave front from the crack starting and stopping [tT (start) and tT (stop)] has much less of an affect on the calculated displacement. After time tT (stop), the displacement reaches a quasi-static value that is larger than the original static value, and then slowly decreases.
The proposed method is used to examine the effect of crack tip velocity (cA), duration of propagation (tc), and spatial location (x) on the calculated displacements; these displacements are the predicted acoustic emission waveforms. The change in the displacement due to variations in crack tip velocity,
1884
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

4.000E-4 B
J , 3.000E-4
t r 2 . 0 0 0 E - 4 -
a. « 1.000E-4 p
J& 0.000
-1.000E-4
x = 0.2m o(0) = 0.02m CA/CR = 0.21
tx, (start) -»•:
tj - (stop)
<r (start)
0.000 2.000E-5 4.000E-5 6.000E-5 8.000E-5 1.000E-4
Time, t (seconds)
FIG. 3. Plot of Displacement, u,{x,t), versus Time, t, due to Crack that Propagates for "Short" Duration, tc
4.000E-4
3.000E-4--
x = 0.2m o(0) = 0.02m cA/cR = 0.21 tc = 40. x 10~6sec
2.000E-4
a •a 1.000E-4--d
i 1 0.000
-1 .000E-4
ti (start)
<i (stop)
0.000 2.000E-5 4.000E-5 6.000E-5 8.000E-5 1.000E-4
Time, t (seconds)
FIG. 4. Plot of Displacement, ux(x, t), versus Time, /, due to Crack that Propagates for "Long" Duration, tc
cA, is shown in Fig. 5. Here, each crack propagates for the same duration, but with different values of crack tip velocity. The results show that the slope and the maximum peak of the displacement functions increase for increasing values of crack tip velocity. It should be noted that in these examples, the final crack length increases for increasing values of tip velocity, so the quasi-static final displacements will also increase.
Fig. 6 illustrates the effect of duration of propagation, tc, on the calculated displacement function. As expected, the longer the duration of propagation,
1885
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

4.000E-4
3.000E-4
.H .2 .000E-4 -h s
=i 3 1.000E-4
0 V u
•3. 0.000--
s - 1 .000E-4
i = 0.2m a(0) = 0.02m <c = 10. x 10-6sec
Cyl/c« = 0.21-
CA/CR = 0.30
cA /c/ j = 0.10
0.000 2.000E-5 4.000E-5 6.000E-5 8.000E-5 1.000E-4
Time, t (seconds)
FIG. 5. Variation of Displacement, ux(x,t), with Crack Tip Velocity, cA
the larger the values of the maximum displacement and the final quasi-static displacement. Fig. 6 also shows that the displacement functions do not deviate from each other, until the arrival time of the longitudinal wave from the crack stopping, tL (stop). This is anticipated, since the displacement at point x will not be affected by an event until the fastest wave front resulting from that event has reached point x.
The displacement functions shown in Fig. 7 illustrate the relationship between distance from the crack, x, and the calculated displacement function. As the distance from the crack source to the point of observation, x, is in-
4.000E-4 B V •a V
JL3 .000E-4 - -
~- 2.000E-4 H
a.
1 I u
1.000E-4--
0 . 0 0 0 -
- 1 . 0 0 0 E - 4
x = 0.2m o(0) = 0.02m cAlcR = 0.21
tc - 20. x 10_6sec
tc = 10. x 10-6sec
tc = 15. x 10-6sec
0.000 2.000E-5 4.000E-5 6.000E-5 8.000E-5 1.000E-4
Time, t (seconds)
FIG. 6. Variation of Displacement, ux(x,t), with Duration of Crack Propagation, tc
1886
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

.4.000E-4
-3.000E-4
H* 2.000E-4--
s a. 1.000E-4
4 0.000 +
- 1 . 0 0 0 E - 4
-a- = 0.2m
• x = 0.4m -x = 0.6m
-+-
o(0) = 0.02m CA/CR = 0.21
tc = 10. x 10~6sec
0.000 2.500E-4 5.000E-4 7.500E-4 0.001
Time, / (seconds)
FIG. 7. Variation of Displacement, ux(x,t), with Distance from Crack Tip, x
creased, the duration of the dynamic displacement signal increases. This is due to the increasing length of time between the arrival of the wave fronts from the crack starting and stopping. In addition, the maximum value of each displacement function first increases and then decreases as the distance, x, increases. It should be noted that the dynamic stress distribution that drives the source model is dependent on the distance x; the x' limits of integration in (6) are equal to the distance that the longitudinal wave travels in the elapsed time. This distance will increase as x increases, causing an increase in the length over which both the static stress, P(x), and the time-dependent stress F(x, t) act. When the point of observation x is very close to the crack propagation source, the increasing length of the stress distribution dominates the calculated displacement signal, and the peak value of displacement will increase for increasing values of x. However, when the location x is far from the crack source, the increased length of the stress distribution is less important than the increasing value of the time between the arrival of the wave fronts. In these cases, the maximum displacement values decrease for increasing values of x.
CONCLUSION
The integral equation method presented in this paper appears to offer a viable procedure to calculate the acoustic emission waveforms from a crack propagation event. The numerical results examine the effect of crack tip velocity, duration of propagation, and distance from the crack source to the point of observation on the calculated acoustic emission waveforms (displacement functions). Specific conclusions include:
1. The acoustic emission waveforms are dominated by the wave fronts from the crack starting and stopping.
2. The slope and maximum value of the acoustic emission waveform increases for increasing values of crack tip velocity.
1887
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

3. The value of maximum displacement is directly proportional to the duration of crack propagation.
4. The value of the final quasi-static displacement increases for increasing values of final crack length.
5. The duration of the acoustic emission waveform increases as the distance from the crack source to the point of observation is increased.
This source model can represent the acoustic emission signal from a dynamic crack growth at a prescribed location, orientation, and velocity profile. The results of the proposed method can be used to characterize experimentally measured acoustic emission waveforms, helping to identify the location of an arbitrary source and to determine the severity of the defect.
ACKNOWLEDGMENT
A portion of this work was performed while the writer was a participant in the Navy/ASEE summer faculty research program at the Naval Air Development Center, Warminster, Pennsylvania.
APPENDIX I. REFERENCES
Achenbach, J. D. (1973). Wave propagation in elastic solids. North-Holland, Amsterdam, The Netherlands.
Achenbach, J. D., and Harris, J. G. (1979). "Acoustic emission from a brief crack growth event." J. Appl. Mech., 46(6), 107-112.
Baker, C. T. H. (1977). The numerical treatment of integral equations. Oxford Univ. Press, New York, N.Y.
Brock, L. M. (1975). "Surface motions due to fault slip in the vertical mode with friction." Bulletin of the Seismological Soc. of America, 65(6), 1653-1666.
Ceranoglu, A. N., and Pao, Y. H. (1981a). "Propagation of elastic pulses and acoustic emission in a plate, Part 1: Theory." J. Appl. Mech., 48(1), 125-132.
Ceranoglu, A. N., and Pao, Y. H. (1981b). "Propagation of elastic pulses and acoustic emission in a plate, Part 2: Epicentral responses." J. Appl. Mech., 48(1), 133— 138.
Ceranoglu, A. N., and Pao, Y. H. (1981c). "Propagation of elastic pulses and acoustic emission in a plate, Part 3: General responses." J. Appl. Mech., 48(1), 139-147.
Davis, P. J., and Rabinowitz, P. (1984). Methods of numerical integration, Academic Press, New York, N.Y.
Eitzen, D. G., and Wadley, H. N. G. (1984). "Acoustic emission: Establishing the fundamentals." J. Res. of the Nat. Bureau of Standards, 89(1), 75-100.
Enoki, M., and Kishi, T. (1989). "Theory and analysis of deformation moment tensor due to microcracking." Int. J. of Fracture, 38(4), 295-310.
Freund, L. B. (1972). "The initial wave front emitted by a suddenly extending crack in an elastic solid." J. Appl. Mech., 39(2), 601-602.
Freund, L. B. (1985). "The mechanics of dynamic crack growth in solids." Fundamentals of Deformation and Fracture: Eshelby Memorial Symp., B. A. Bilby, K. J. Miller, and J. R. Willis, eds., Cambridge Univ. Press, Cambridge, England, 163-185.
Jacobs, L. J., and Bieniek, M. P. (1990). "An integral equation method for dynamic crack growth problems." Int. J. Fracture, 46(3), 207-221.
Jacobs, L. J., Scott, W. R., Granata, D. M., and Ryan, M. J. (1989). "Acoustic emission from a growing crack." Review of Progress in Quantitative Nondestructive Evaluation, Plenum Press, New York, N.Y., 1749-1756.
Kim, K. Y., and Sachse, W. (1986a). "Acoustic emission from penny-shaped cracks in glass. I. Radiation pattern and crack orientation." J. Appl. Physics, 59(8), 2704-2710.
Kim, K. Y., and Sachse, W. (1986b). "Acoustic emission from penny-shaped cracks in glass. II. Moment tensor and source-time function." J. Appl. Physics, 59(8), 2711-2715.
1888
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

Kim, K. Y., and Sachse, W. (1986c). "Characteristics of an acoustic emission source from a thermal crack in glass." Int. J. Fracture, 31(3), 211-231.
Niazy, A. (1973). "Elastic displacements caused by a propagating crack in an infinite medium: an exact solution." Bulletin of the Seismological Soc, of America, 63(2) 357-379.
Ohtsu, M. (1989). "Source kinematics of acoustic emission based on a moment tensor." NDT Int., 22(1), 14-20.
Ohtsu, M., and Ono, K. (1986). "The generalized theory and source representations of acoustic emission." J. Acoustic Emission, 5(4), 124-133.
Pao, Y. H. (1978). "Theory of acoustic emission." Elastic Waves and Nondestructive Testing of Materials, American Soc. of Mech. Engrs., 107-128.
Rose, L. R. F. (1976). "Recent theoretical and experimental results on fast brittle fracture." Int. J. Fracture, 12(6), 799-813.
Rose, L. R. F. (1981). "The stress-wave radiation from a growing crack." Int. J. of Fracture, 17(1), 45-60.
Weiss, R., and Anderssen, R. S. (1972). "A product integration method for a class of singular first kind Volterra equations." Numerishe Mathematik, Germany, 18, 442-456.
APPENDIX II. NOTATION
The following symbols are used in this paper:
a(0) a(f)
cA
CL
cT
CR
F(x,t) K{t)
Po P{x) Six)
s SL
SK
ST
tc k (start)
tL (stop)
tT (start)
h (stop)
u u u* *-*xyi ^ yy> *-*yy Ux,Uy
€
V-V
= = = = = = = = = = = = = = = = =
=
=
=
= = = = =
initial crack tip location; crack tip location at time t; crack tip speed; longitudinal wave speed; transverse wave speed; Rayleigh wave speed; time dependent stress distribution; time variation of time-dependent stress distribution; far field static stress; initial static stress distribution; nonsingular portion of integrand; slowness variable [s = (t — t')/\x — x'\]; longitudinal wave slowness; Rayleigh wave slowness; transverse wave slowness; duration of crack propagation; time of arrival of longitudinal wave front from crack starting; time of arrival of longitudinal wave front from crack stopping; time of arrival of transverse wave front from crack start
ing; time of arrival of transverse wave front from crack stopping; influence functions; displacements; small spatial step; Lame constant; and Poisson ratio.
1889
J. Eng. Mech. 1991.117:1878-1889.
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
DA
DE
FE
DE
RA
L D
O R
IO o
n 04
/23/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.





























