Embed Size (px)
DESCRIPTION
Automatizacion
Citation preview

2014
Representación de los automatismos
Automatización Industrial y Lab
Diana Paola Blanco Rendón
Ingeniero en Mecatrónica, MSc en Automatización Industrial
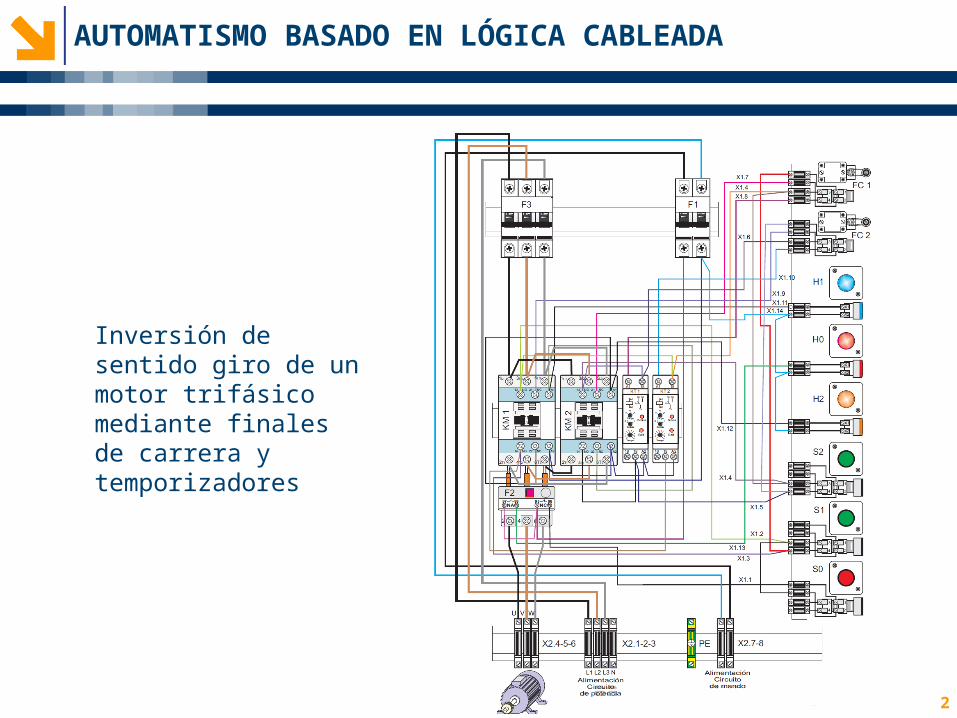
AUTOMATISMO BASADO EN LÓGICA CABLEADA
2
Inversión de sentido giro de un motor trifásico mediante finales de carrera y temporizadores
3
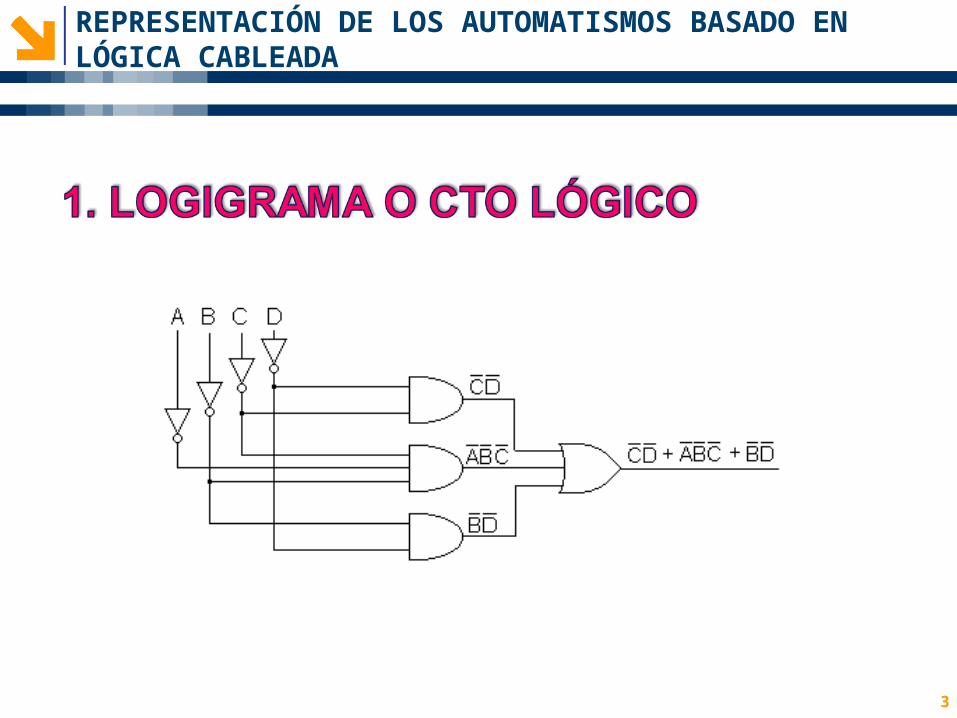
REPRESENTACIÓN DE LOS AUTOMATISMOS BASADO EN LÓGICA CABLEADA
4
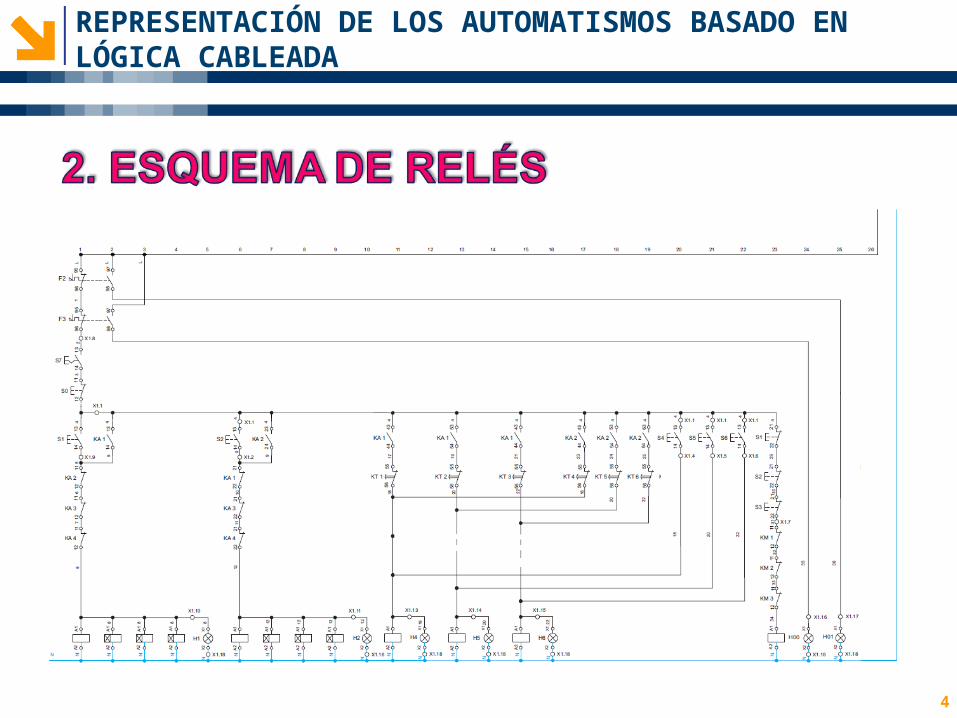
REPRESENTACIÓN DE LOS AUTOMATISMOS BASADO EN LÓGICA CABLEADA
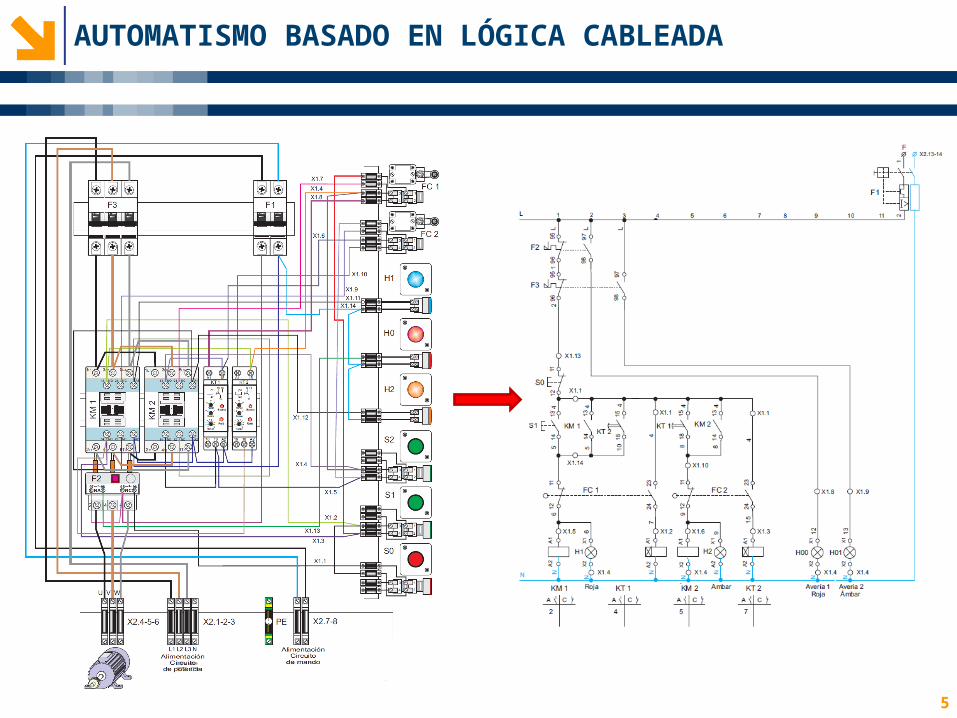
AUTOMATISMO BASADO EN LÓGICA CABLEADA
5
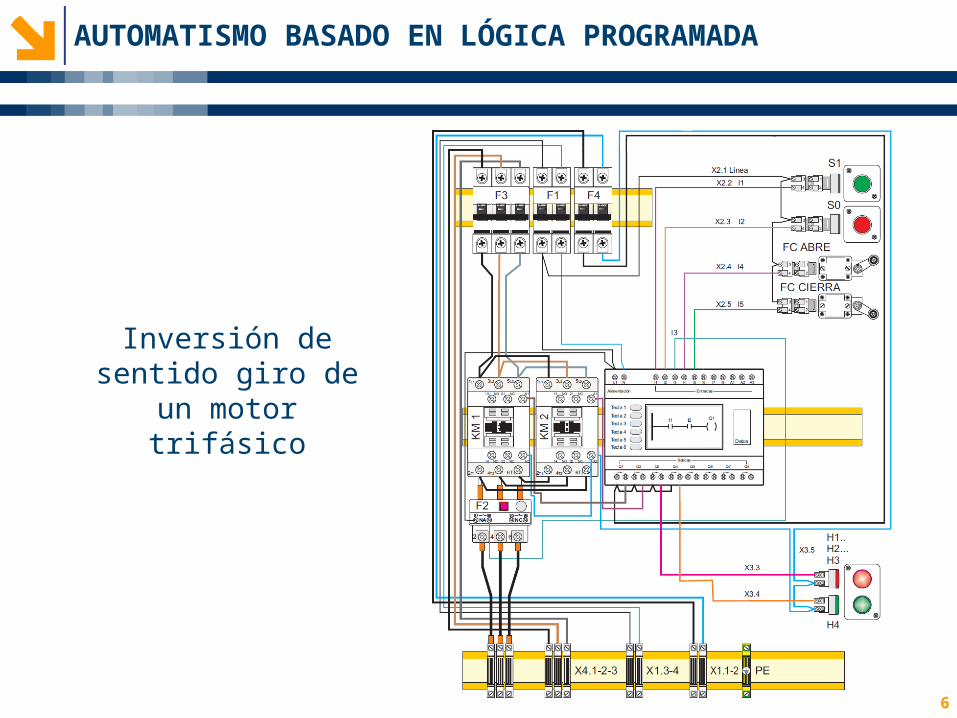
AUTOMATISMO BASADO EN LÓGICA PROGRAMADA
6
Inversión de sentido giro de un motor
trifásico
7
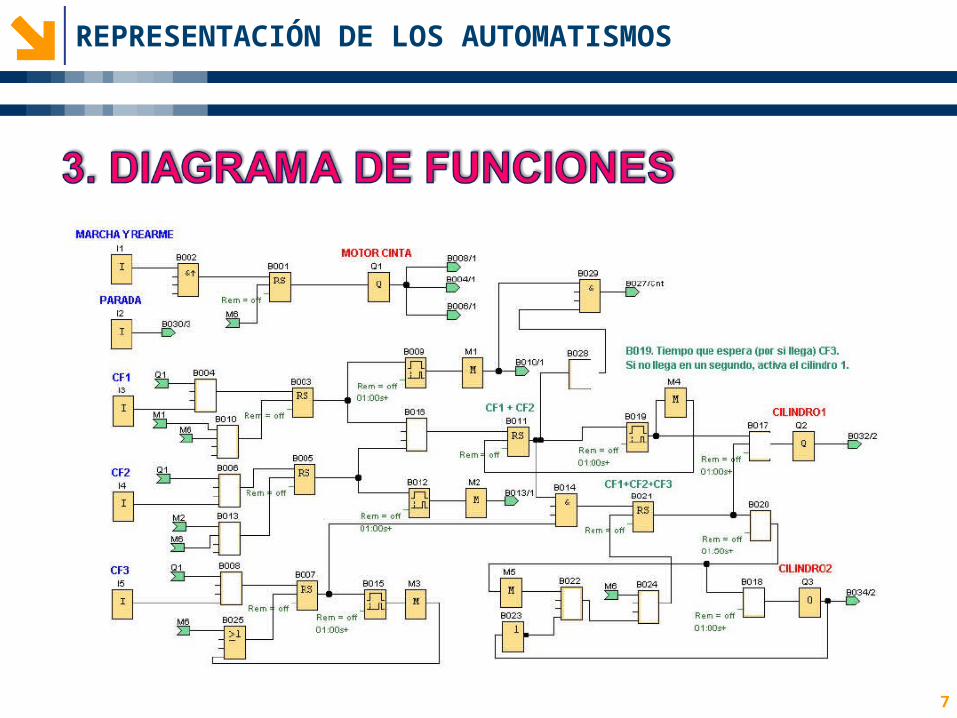
REPRESENTACIÓN DE LOS AUTOMATISMOS
8
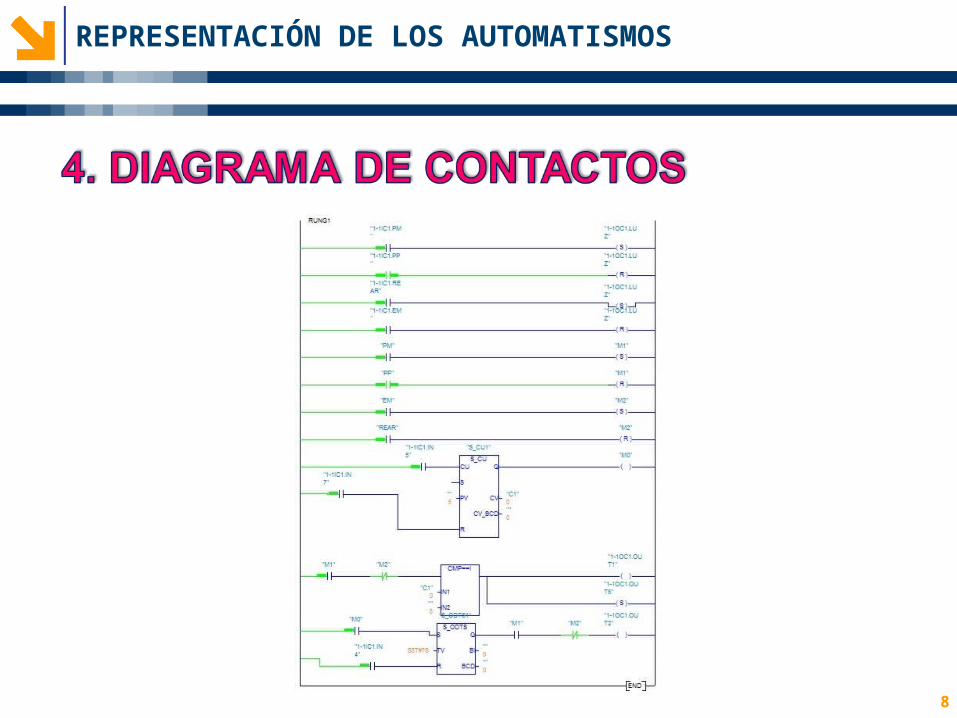
REPRESENTACIÓN DE LOS AUTOMATISMOS
9
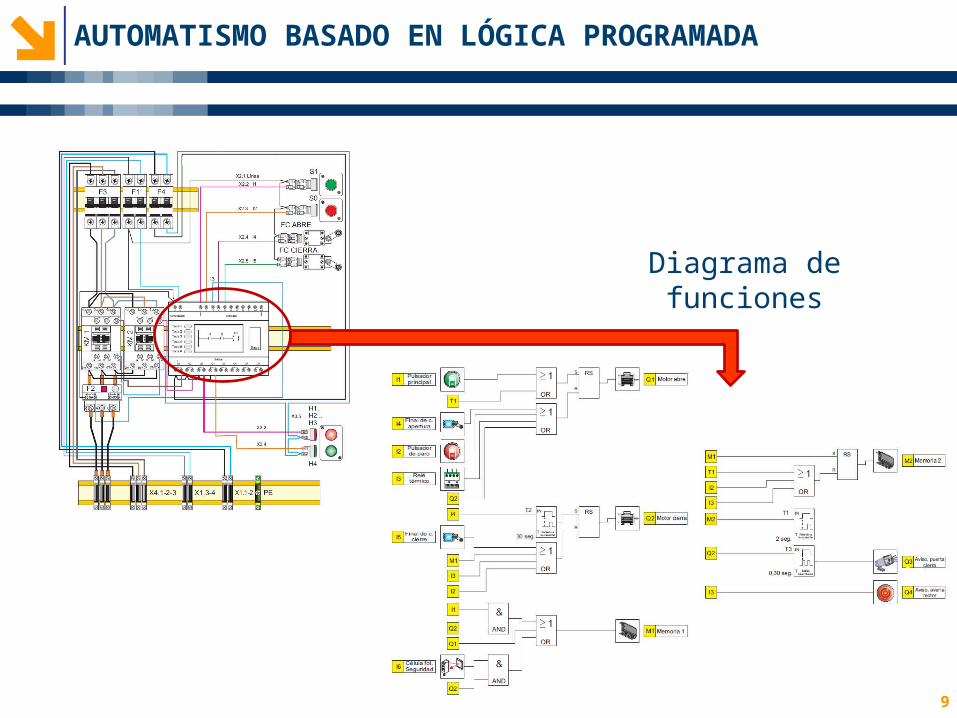
AUTOMATISMO BASADO EN LÓGICA PROGRAMADA
Diagrama de funciones
10
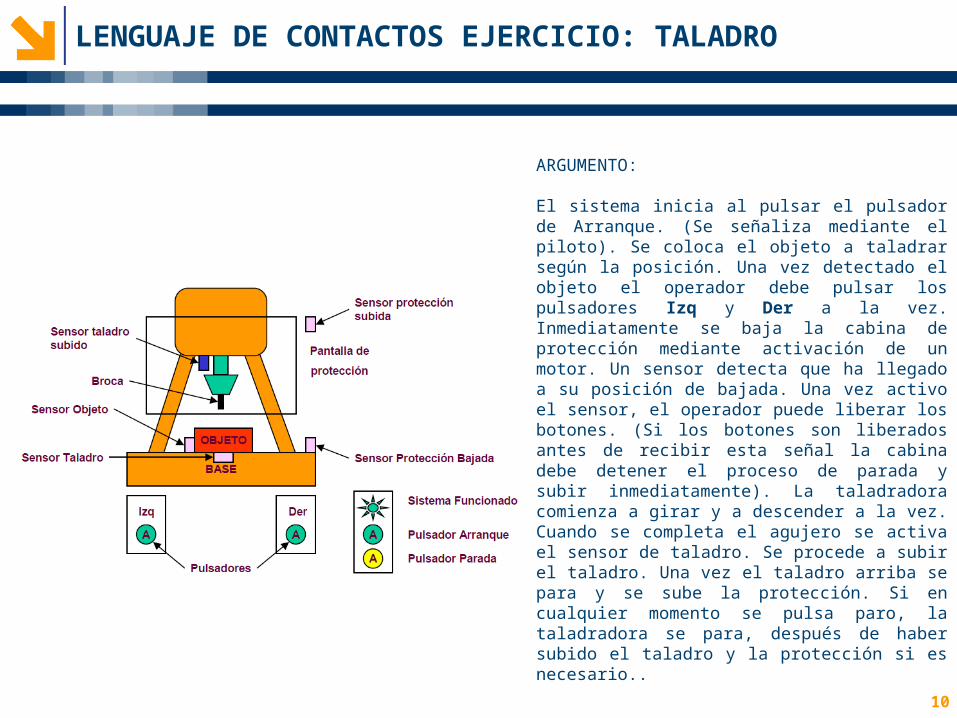
LENGUAJE DE CONTACTOS EJERCICIO: TALADRO
ARGUMENTO:
El sistema inicia al pulsar el pulsador de Arranque. (Se señaliza mediante el piloto). Se coloca el objeto a taladrar según la posición. Una vez detectado el objeto el operador debe pulsar los pulsadores Izq y Der a la vez. Inmediatamente se baja la cabina de protección mediante activación de un motor. Un sensor detecta que ha llegado a su posición de bajada. Una vez activo el sensor, el operador puede liberar los botones. (Si los botones son liberados antes de recibir esta señal la cabina debe detener el proceso de parada y subir inmediatamente). La taladradora comienza a girar y a descender a la vez. Cuando se completa el agujero se activa el sensor de taladro. Se procede a subir el taladro. Una vez el taladro arriba se para y se sube la protección. Si en cualquier momento se pulsa paro, la taladradora se para, después de haber subido el taladro y la protección si es necesario..





























