Embed Size (px)
Citation preview

a
ovaoec
Classification of stable configurations of plane mirrors
Yaakov Friedman and Naftali Schweitzer
We have studied the stability of systems of plane mirrors by using a new way to describe ray transfor-mations caused by such systems. All stable systems comprising as many as three mirrors are describedand classified. Besides the well-known corner cube, infinitely many stable retroreflecting and direction-preserving three-mirror systems have been found. © 1998 Optical Society of America
OCIS codes: 080.2720, 220.2740.
9
riridmd
1. Introduction
Plane mirrors are widely used in optical systems.Many systems utilize reflecting devices that compriseseveral plane mirrors in a series. It is essential forsuch reflecting devices to be optically stable to ensurethat the entering beam of light exits the system in thedesired direction. By an optically stable reflector wemean that, for a given direction of an incoming beamof light, the reflecting device reflects the light in afixed direction independent of device tilting ~as longs the beam can enter the reflector aperture!.Few optically stable reflecting devices were previ-
usly known. The most familiar optically stable de-ice is the cube-corner reflector that reflects light atn angle of 180°. Such retroreflectors are comprisedf three mutually perpendicular reflecting surfaces,ither plane mirrors or the surfaces of a tetrahedronut from the corner of a glass cube,1 and they have
been recognized for more than half a century.2 Sev-eral authors have studied the optical stability of thecube corner with dihedral angles that are a littledifferent from 90°.3–5 Skop et al.6 found that thecombination of a roof prism and a right-angle prism isnearly stable for reflection angles near 180°. Beggs7
used the reflection matrix to study the stability of asystem of mirrors under displacement. Kingslake8
has summarized the stability of plane-mirror config-urations and mentions only the stability of the cubecorner and the partial stability of a two-mirror angle.
The authors are with the Department of Applied Mathematicsand Electrooptics, Jerusalem College of Technology, P.O.B. 16031,Jerusalem, Israel. Y Friedman’s e-mail address is [email protected].
Received 18 May 1998; revised manuscript received 21 July1998.
0003-6935y98y317229-06$15.00y0© 1998 Optical Society of America
Recently it has been shown that a plane-mirror sys-tem can be stable only if it is either retroreflecting allincoming rays or direction preserving for all incomingrays.
The following questions are still open: Are thereother retroreflecting devices besides the cube corner?Are there other stable direction-preserving devicesbesides the simple periscope mentioned in Ref. 9?Assuming that other optically stable devices do exist,is it possible to classify them and how? What is therelationship between the property of mirror systemstability and the image orientation?
Since the ray transformation by a plane-mirror sys-tem is described by an orthogonal 3 3 3 matrix thatalways has at least one real eigenvalue, there is al-ways a direction in space that is either preserved orretroreflected by this transformation. As shown inRef. 9, this implies that for any system there is aplane 3 such that the 3 component of any incomingay is mapped into a vector parallel to this plane. Its convenient to use complex numbers to describe theay transformation of the 3 component of the incom-ng rays. This description is used here to analyze inetail optical systems that comprise one, two, or threeirrors. All stable configurations of this kind are
escribed.
2. Ray Transformation by Plane Mirrors
A plane mirror transforms an incoming ray into areflected ray. Since this transformation dependsonly on the orientation of the mirror, which may bedescribed by its normal n, we denote it as Tn. Thus,if the direction of the incoming ray is described by aunit vector in space r, the vector describing the di-rection of the ray reflected by the mirror is denoted byTn~r!. Note that the ray transformation reversesthe component of r in the direction n of the normal tothe mirror, whereas the component parallel to theplane is preserved. The component of r in the direc-
1 November 1998 y Vol. 37, No. 31 y APPLIED OPTICS 7229

t
odj
ztlTv
tv
acvw
t
sovrrbwm
smmutmdefdAaaatpa
tmflr
7
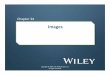
tion n is ~n z r!n, where the dot sign denotes the scalarproduct in R3 and the complementary component of rparallel to the plane is r 2 ~n z r!n. Thus the rayransformation has the form
Tn~r! 5 @r 2 ~n ? r!n# 2 ~n ? r!n 5 r 2 2~n ? r!n (1)
~See Fig. 1!. A similar transformation was used byHopkins.10,11 Obviously, Tn is a linear transforma-tion. In addition, it is symmetric with respect to theplane of the mirror. Since both components of Tn~r!and r have the same length, Tn preserves the lengthf vectors and is an orthogonal transformation byefinition. The imaging transformation for any ob-
ect is identical to that of a ray.Recall that for any linear transformation A a non-
ero vector v is an eigenvector of A if v is mapped byhe transformation into a multiple of v, i.e., Av 5 lv.is called an eigenvalue of A. The transformation
n has two different eigenvalues, 1 and 21: Theector n is the 21 eigenvector, and any vector l par-
allel to the plane of the mirror ~i.e., l z n 5 0! is a 1eigenvector of Tn. Since the plane of symmetry iswo dimensional, the eigenvalue 1 is a double eigen-alue of Tn.It will be convenient to use complex numbers to
describe Tn. This can be done as follows. Let l bes above. The vectors in the plane 3l ~normal to l!an be represented by complex numbers. The unitector n in this plane is represented by exp~iw!, whereis the angle between n and the positive direction of
the real axis. If r is in-plane, from Eq. ~1! it followsthat Tn~r! is also in-plane. Thus plane 3l is invari-ant under Tn. For any z, w in the complex plane thedot product is by definition, z z w 5 Re~z#w!, where2 Re z 5 z 1 z#, so for any z in 3l from Eq. ~1! we have
Tn~z! 5 z 2 2 Re@exp~2iwz!#exp~iw! 5 2exp~2iw!z#. (2)
For a system of several mirrors the ray transfor-mation of the system is the product of the ray trans-formations of the mirrors in the same order as the raywas reflected. This transformation is also linear.
3. Stability of One Mirror
A parallel translation of the mirror does not changen, so the ray transformation Tn is invariant in suchan operation. Denote by Rk
u the space rotation byangle u about arbitrary direction k. If k 5 6n, ob-
Fig. 1. Ray transformation by a plane mirror.
230 APPLIED OPTICS y Vol. 37, No. 31 y 1 November 1998
viously TRkun 5 Tn. If k 5 l is parallel to the mirror
plane, vector n is parallel to plane 3l and is rotatedhere by u. Thus Rk
un 5 exp@i~w 1 u!#. For anydirection parallel to plane 3l from Eq. ~2! we have
TRkun~z! 5 2exp@2i~w 1 u!#z# 5 exp~2iu!Tn~z!, (3)
meaning that the reflected rays in 3l are rotated byangle 2u.
For rotation about arbitrary k in space, let n 5Rk
u~n!. The effect of rotation Rku on the mirror is the
ame as the rotation about direction k that is orthog-nal to both vectors n and n by angle c between theseectors. Obviously, ucu # u. To conclude, one mir-or is stable under parallel translation and underotation about the normal to its plane but is not sta-le in general. Rotation of the mirror by an angle uill rotate the reflected ray by an angle that is atost equal to 2u.
4. Stability of Two-Mirror Systems
In this section we consider the stability of two-mirrorsystems. First, we show that a system of two par-allel mirrors ~a periscope or a rhomboid! is opticallytable. Then we consider systems with nonparallelirrors generating a two-mirror angle. For a two-irror angle with sufficiently large mirrors the rayndergoes several reflections before it leaves the sys-em. By a system with sufficiently large mirrors weean that the ray exits the system only because of its
irection and not because the mirrors are not largenough. Thus, to be able to describe the ray trans-ormation of the system, we must develop a method toetermine the number of reflections in the system.t the end of this section we show that a two-mirrorngle is not stable in general. However, for somengles there is partial stability under rotations eitherbout the line of intersection of the mirrors or abouthe bisector of the angle beside the stability underarallel translation. This is used in Section 5 tonalyze the stability of three-mirror systems.Consider now a two-mirror system with normals n
and m. The n 5 m case is equivalent to one mirrorand was discussed above. The case n 5 2m corre-sponds to two parallel mirrors ~a periscope!, and fromEq. ~1! TmTn is the identity operator. If the rayundergoes an even number of reflections 2j, the raytransformation of the system is ~TmTn!j 5 I—theidentity operator. Since the identity operator is anidentity in any coordinate system, the ray transfor-mation of such system is invariant under any rotationor translation. But if the ray undergoes an oddnumber of reflections, the system acts as if only thelast mirror is reflecting and is not stable. Thus asimple periscope is stable under transformations thatdo not change the even number of reflections of theincoming ray as mentioned in Ref. 9.
For the n Þ 6m case let v Þ 0 be the angle betweenhe planes of the mirrors. @The angle between n and
is 180° 2 v.# Consider first the effect of one re-ection in the first mirror and one in the second mir-or of the incoming ray. These two reflections

T
a
sLap
S
r
S
i
transform the direction r of the incoming ray intodirection TmTn~r!. Let l be the direction of the in-tersection line of the planes of the mirrors. Since l isparallel to the planes of both mirrors, it is a 1 eigen-vector of both Tn and Tm so that TmTn~l! 5 l. Since
mTn is an orthogonal transformation, the vectorsthat are perpendicular to l remain perpendicular to l.Thus plane 3l of the vectors orthogonal to l is invari-nt under TmTn. Owing to its linearity the ray
transformation of any incoming ray r is equal to theum of the transformations on each component of r.et us decompose r into one component in direction lnd another component perpendicular to l, parallel tolane 3l. As mentioned above, the l component is
preserved by a two-mirror system, whereas the 3lcomponent remains parallel to the 3l plane. So wealways must consider only the 3l component.
Let z represent the 3l component of the incomingdirection r. By Eq. ~2! for any z we have
Tm Tn~z! 5 exp@2i~w 1 v!#exp~22iwz!
5 exp~2ivz! 5 Rl2vz, (4)
which means that one reflection in the first mirrorand one in the second mirror of a two-mirror anglerotate the incoming ray by angle 2v about l.
Generally, in the literature8 it is claimed that atwo-mirror system with angle v between the mirrorsrotates an incoming ray by angle 2v. This rotationoccurs only if after the second reflection the ray exitsthe system, which is often not the case. Thus, toobtain the ray transformation of a two-mirror system,we must develop a method to determine the numberof reflections in the system.
We will prove that the number of reflections s isgiven by
s 5 IntSp 2 c
v D 1 1, (5)
where Int~a! denotes the integer part of a number aand c is the angle between the incoming ray and theplane of the first mirror. As explained above, it issufficient to prove Eq. ~5! only for the 3l component ofthe incoming ray.
Let us choose the coordinate system so that n 5 i,m 5 exp@i~v 2 py2!#, and the incoming ray is describedby z 5 exp@i~c 1 p!# with 0 # c # v ~see Fig. 2!.
From Eq. ~2! it follows that in 3l we have
Tn~z! 5 2exp~ip!z# 5 z#, Tm~z! 5 exp~2iv!z#. (6)
If the number of reflections is even, say 2j, and j is anatural number, the ray leaving the system is de-scribed @from Eq. ~4!# by
~Tm Tn!j exp@i~c 1 p!# 5 exp@i~c 1 p 1 2jv!#. (7)
ince this ray is leaving the system, we have
2p # c 1 p 1 2jv # 2p 1 v,
p 2 c
v# 2j #
p 2 c
v1 1,
implying Eq. ~5! with s 5 2j.If the number of reflections is odd, say 2j 1 1, the
ay leaving the system is described @from Eqs. ~4! and~6!# by
Tn~Tm Tn!j exp@i~c 1 p!# 5 exp@2i~c 1 p 1 2jv!#. (8)
ince this ray is leaving the system, we have
22p # 2p 2 c 2 2jv # 22p 1 v,
p 2 c
v2 1 # 2j #
p 2 c
v,
mplying Eq. ~5! with s 5 2j 1 1, Q.E.D.From Eq. ~5! it follows that generally for a two-
mirror angle the number of reflections of incomingrays depends on the value of c. But for some two-mirror angles with sufficiently large mirrors all en-tering rays ~for all possible values of c! undergo thesame number of reflections, so in this case all incom-ing rays undergo the same transformation. Thesetwo-mirror systems have angle v 5 pyj for a naturalj. We now analyze the stability of such systems. InSection 5 we see that they are parts of stable three-mirror systems.
Consider first two-mirror systems with v 5 py~2j!for some natural number j. From Eq. ~5! it followsthat all the incoming rays leave the system after 2jreflections. ~See Fig. 3 for the j 5 2 case.!
Fig. 2. Representation of a two-mirror system in the complexplane.
Fig. 3. Two-mirror system with v 5 45°: O, range of the incom-ing directions; I, range of the first reflected directions; II, range ofthe second reflected directions; III, range of the third reflecteddirections; IV, range of the fourth reflected outgoing directions.
1 November 1998 y Vol. 37, No. 31 y APPLIED OPTICS 7231

t
slTur
n
e
ftu3
w
sirtua
7
The ray transformation of such a system when Eq.~7! is used is
~Tm Tn!j~z! 5 2z, (9)
implying that all incoming rays that belong to 3l areretroreflected by such a two-mirror system. Such asystem is stable under rotations about the line ofintersection of mirror planes. To analyze the stabil-ity under parallel translation, consider a system thatis a symmetric reflection of our system with respect tothe plane of the first mirror, which is also a two-mirror angle with the same v. An incoming ray inthe second system that is symmetric to an incomingray in our original system undergoes the same num-ber of reflections, but it hits the second mirror first.Also, for this ray the l component is preserved whilehe 3l component is retroreflected, and the exit ray
has the same direction as the ray hitting the firstmirror first. Another way to see the stability underparallel translation is to reverse the direction of theexit ray and use the Fermat principle. ~Note that,ince the number of reflections is even, the exit rayeaves the system after hitting the second mirror.!hus a two-mirror angle with v 5 py~2j! is stablender parallel translations beside its stability underotation about the line of intersection.
Consider now the v 5 py~2j 1 1! case for someatural number j. From Eq. ~5! it follows that all
incoming rays will leave our system after only 2j 1 1reflections. ~See Fig. 4 for the j 5 1 case.!
By use of Eq. ~8! and substitution of 2j 5 pyv 2 1,the ray transformation for the system will be
Tn~Tm Tn!j~z! 5 exp@i~2p 1 v!#z# 5 2exp~ivz#!, (10)
which by Eq. ~2! corresponds to a ray transformationof the 3l component for one mirror with normal n 5xp~ivy2!. Also, the l component of this system is
preserved as in one mirror. Thus a two-mirror sys-tem with v 5 py~2j 1 1! for some natural number jreflects rays like one mirror with the normal in thedirection of the bisector of the angle between themirrors. Thus the stability of this system is thesame as the stability of one mirror discussed in Sec-tion 3. As mentioned there such a system is stable
Fig. 4. Two-mirror system with v 5 60°: O, range of the incom-ing directions; I, range of the first reflected directions; II, range ofthe second reflected directions; III, range of the third reflectedoutgoing directions.
232 APPLIED OPTICS y Vol. 37, No. 31 y 1 November 1998
under parallel translation and rotation about the nor-mal, which is the bisector direction in our case.
Finally, if pyv is not a natural number, some rayswill undergo an even number of reflections, whereasthe others will undergo an odd number of reflectionsresulting in double imaging. On the one hand, whenthe number of reflections is an even number 2j, theray transformation given by Eq. ~7! is
~Tm Tn!j~z! 5 exp~i2vj!z, (11)
meaning that the incoming ray is rotated by the sys-tem by a fixed angle about l. For such rays thesystem is stable under rotations about l.
On the other hand, if the number of reflections isodd 2j 1 1 or 2j 2 1, the ray transformation given byEq. ~8! is
Tn~Tm Tn!j~z! 5 exp~2i2vj!z# (12)
or
Tn~Tm Tn!j21~z! 5 exp@2i2v~ j 2 1!#z#. (13)
These rays are transformed by the system as with asingle-mirror transformation @see Eq. ~2!#. Thus forsuch rays the stability is the same as for one mirrordescribed in Section 3. Note that the transforma-tion described by Eq. ~11! differs from the transfor-mation described either by Eq. ~12! or by Eq. ~13!,since the first preserves the angle between incomingand exit rays, while the second reverses the angle.
Consider, for example, a two-mirror angle with v 550°. From Eq. ~5! it follows that the group of incom-ing rays with angle c # 30° ~see Fig. 2! undergoesour reflections before exiting the system, whereashe group of incoming rays with angle 30° # c # 50°ndergoes three reflections. For the first group thel component of any exit ray, given by Eq. ~11! with
j 5 2 and v 5 50°, is rotated by 200° with respect tothe 3l component of the corresponding incoming rayor 20° with respect to the retroreflecting direction.For the second group the 3l component of the exit ray,given by Eq. ~13! with j 5 2 and v 5 50°, is
exp~2i100!z# 5 2exp~i80!z#,
hich by Eq. ~2! is a reflection symmetry of the 3lcomponent of the incoming ray with respect to the 40°direction. Thus we can transform this system firstby rotating all incoming rays by 20° with respect tothe retroreflecting direction and then by foldingabout the second mirror the overflowing rays.
Since the direction l is preserved by a two-mirrorsystem with v Þ 0, from Ref. 9 it follows that suchystem is stable only if it preserves the direction of allncoming rays. But in all cases in plane 3l the di-ections of some rays are not preserved. Thus allwo-mirror systems with angle v Þ 0 are not stablender tilting, although they may be partially stables explained above.

~mo
~mImm
g
tC
foTmiadf
foitsr4i
5. Stability of Three-Mirror Systems
Consider now a three-mirror system with normals n,m, and k. The mirrors are numbered in the orderthat they are first hit by the ray: The normal of themirror that is hit first is denoted by n, the normal ofthe mirror that is hit second is denoted by m, and thenormal of the last mirror is denoted by k. Note thatthere may be several reflections from the first twomirrors before the first reflection in the third mirrortakes place. If any two mirrors in a system have thesame normals, they may be replaced by one mirrorand the system is equivalent to the two-mirror sys-tem discussed above. Thus we assume that all nor-mals n, m, and k are different.
If the planes of the first two mirrors are parallel,then m 5 2n and ~according to our assumption! thethird mirror is not parallel to them. If the thirdmirror is hit only at the last reflection, then since byEq. ~1! TmTn 5 I, the ray transformation of the sys-tem is either
Tk~Tm Tn!j 5 Tk (14)
for an even number of reflections from the first twoirrors!, acting like a transformation by one mirror,
r
Tk Tn~Tm Tn!j 5 Tk Tn (15)
for an odd number of reflections in the first twoirrors!, acting like a transformation by two mirrors.
n both cases the system is unstable. If there areore reflections after the ray first meets the thirdirror, in the first case it follows from Eq. ~14! that
all reflections preceding that of k can be neglected.In this case the mirror with normal k may be consid-ered as the first mirror hit with the second one non-parallel to it. Similarly, in the second case it followsfrom Eq. ~15! that the first 2j reflections can be ne-lected and the mirror with normal k may be consid-
ered as the second mirror hit. This mirror isnonparallel to the first one. The resulting systemsare treated now.
Assume from now on that the first two mirrors arenonparallel ~but the third mirror may be parallel toone of them!. As above, denote by v Þ 0 the anglebetween the first two mirrors and by l the direction ofhe intersection of the planes of the first two mirrors.onsider first the case in which k z l 5 O, which
means that the plane of the third mirror is parallel tothe line of intersection of the first two mirrors.
Since a ray parallel to l will not change direction,rom Ref. 9 it follows that the system can be stablenly when it is direction preserving for all directions.herefore we now seek the condition on the first twoirrors that will make the system direction preserv-
ng. Since the whole system transforms rays as doesperiscope, the first two mirrors together must act asoes one mirror with normal 2k. From Section 4 itollows that this is the case only if v 5 py~2j 1 1! for
some natural number j and 2k is the bisector direc-tion between the first two mirrors. Such a systemacts as a periscope with the same conditions for sta-
bility. Note that parallel translation can change theorder of reflections in the first and the second mirrors,which by Section 3 does not affect the direction of theoutgoing ray. According to the Fermat principle,also the direction of a ray hitting the third mirror firstwill be preserved by the system. Thus such a systemis stable under parallel translation. ~See Fig. 5 for anexample of such a stable direction-preserving three-mirror system with j 5 1 and v 5 60°.!
We consider now a system containing three mirrorsor the case in which k 5 6l, meaning that the planef the third mirror is perpendicular to the line ofntersection of the first two mirrors. Since in direc-ion l the incoming rays are retroreflected, for theystem to be stable according to Ref. 9 it must beetroreflecting in all directions. As shown in Section, the only two-mirror systems that are retroreflect-ng the 3l component are systems with v 5 py~2j!.
It is easy to see that in this case the transformationof a ray being reflected 2j times from the first twomirrors and then from the third one is
Tk~Tm Tn!j 5 2I, (16)
implying that such a system behaves as a retroreflec-tor: For the 3l component of the incoming ray thisbehavior follows from Eq. ~9! and because Tk pre-serves this component. For the l component the first2j reflections act as an identity, and the last onereverses the direction of the ray. Since k is perpen-dicular to both n and m, the operator Tk commuteswith both Tm and Tn, so Eq. ~16! holds also for anyincoming ray reflected by the three mirrors in anyorder. Thus such a system is stable under transla-tions and rotations. The well-known triple-mirrorretroreflector is a particular case of such a systemwith j 5 1.
The analysis of all other cases is straightforward.For these cases k Þ 6l and k z l Þ O and thereforeTk~TmTn!jl 5 Tkl Þ 6l. From Ref. 9 it follows thatsuch systems cannot be stable under rotations.Thus the only stable three-mirror systems are theconfigurations described above.
6. Discussion
In Ref. 9 it was shown that optically stable mirrorsystems are either direction preserving or retrore-flecting for all incoming rays. Even unstable mirror
Fig. 5. Stable three-mirror system with v 5 60°.
1 November 1998 y Vol. 37, No. 31 y APPLIED OPTICS 7233

7
systems could be designed to have some stability. Asingle mirror is a simple example. It is invariant torotations in the plane of the mirror as well as to aparallel translation. Rays parallel to the axis of ro-tation are not deviated, whereas those perpendicularto the axis of rotation suffer maximum deviation.Obviously, the mechanical support of a single mirrorshould be as stable as possible in the direction per-pendicular to the axis of possible unwanted rotation.The same applies to any other unstable system.
Two parallel plane mirrors constitute an opticallystable system in the forward direction for an evennumber of reflections. The basic periscope is a com-mon example. From the above, it is seen that, be-sides producing an erect image, the parallel mirrorarrangement has another advantage over the par-tially stable combination of two mutually perpendic-ular mirrors; it is optically stable. This is valid inthe visible as well as in the microwave regions.12
Two large, i.e., when multiple reflections may oc-cur, nonparallel mirror systems are always unstableunder two independent rotations. A two-mirror sys-tem with angle v 5 py2j, where j is a natural num-ber, between the mirrors is stable under rotationsabout the line of intersection between the mirrorsand under parallel translations. In this case all in-coming rays that are perpendicular to the intersec-tion line are retroreflected. A two-mirror systemwith angle v 5 py~2j 1 1!, where j is a naturalnumber, between the mirrors is stable under rota-tions about the bisector of the mirrors and underparallel translations. In this case the two-mirrorsystem reflects rays as does one mirror with the nor-mal in the direction of the bisector. If pyv is not anatural number, double imaging usually results.
Infinitely many optically stable systems with threelarge mirrors have been found. Every triple mirrorthat fulfills the following conditions is optically sta-ble. Two of the mirrors are placed at angle v 5py~2j 1 1!, where j is a natural number, and the thirdmirror is placed with its normal parallel to the bisec-tor of the planes of the other two mirrors ~see Fig. 5!.Just like the usual periscope, these systems preservethe direction of the incoming ray and have similarconditions of stability.
If the line of intersection is perpendicular to theplane of the third mirror and v 5 py2j, a perfectretroreflector results. Since a mirror-based cornercube is only a particular case, the term triple mirror,frequently used for this corner cube, is not specificenough. A cube corner has several advantages overother three-mirror retroreflectors. It has the largestfield and aperture, and the incoming ray experiencesthe minimum number of reflections, resulting in bet-ter energy throughput and less cumulative error inthe angle of reflection. However, when small-fieldangle devices are required, as in scanning systems, atriple-mirror system with v , 90° has anadvantage—it may be used as a field stop.
234 APPLIED OPTICS y Vol. 37, No. 31 y 1 November 1998
A full formulation of the N . 3 cases is more dif-ficult to develop. However, some extension toN-mirror systems is straightforward. Such stableconfigurations can be constructed with double- andtriple-mirror systems in series. For example, thefamiliar Porro system with four mirrors ~or two right-angle prisms! used in binoculars is stable. Stablesix-mirror systems can be constructed either by threestable double-mirror systems in series ~the forwarddirection is preserved! or by two stable triple-mirrorsystems ~either forward or backward directions arepreserved!. Note that theoretically there is an infi-nite number of discrete stable configurations for eachtriple-mirror subsystem. In addition, one sub-system can be rotated ~tilted! arbitrarily with respectto the other subsystem. The resulting number ofpossible stable configurations is a product of the threeinfinite numbers. There may be other ~infinitelymany! possible stable configurations for N 5 6 thatare not based on a series of stable subsystems.There is a need for new mathematical tools for gen-eral formulation. A general formulation forN-mirror systems, an evaluation of stable mirror sys-tems with small structural deviations, and a descrip-tion of prism systems will be published inforthcoming papers.
The authors thank L. Levi and an anonymous ref-eree for helpful comments about the presentation ofthe material in this paper.
References1. L. Levi, Applied Optics ~Wiley, New York, 1968!, pp. 351, 363.2. R. C. Spencer, “Optical theory of corner reflector,” MIT Radi-
ation Laboratory Report 433 ~Massachusetts Institute of Tech-nology, Cambridge, Mass., 1944!.
3. P. R. Yoder, Jr., “Study of light deviation errors in triple mirrorand tetrahedral prisms,” J. Opt. Soc. Am. 48, 496–499 ~1958!.
4. K. N. Chandler, “On the effects of small errors in angles ofcorner-cube reflectors,” J. Opt. Soc. Am. 50, 203–206 ~1960!.
5. H. D. Eckhardt, “Simple model of corner reflector phenomena,”Appl. Opt. 10, 1559–1566 ~1971!.
6. M. Skop, D. Ben-Ezra, and N. Schweitzer, “Adjustable stabi-lized reflector for optical communication,” in Proceedings of theIEEE Nineteenth Convention of Electrical and Electronics En-gineers in Israel, Jerusalem ~IEEE, New York, 1996!, pp. 383–386.
7. J. S. Beggs, “Mirror-image kinematics,” J. Opt. Soc. Am. 50,388–393 ~1960!.
8. R. Kingslake, Optical System Design ~Academic, New York,1983!, pp. 153–154.
9. N. Schweitzer, Y. Friedman, and M. Skop, “Stability of systemsof plane reflecting surfaces,” Appl. Opt. 37, 5190–5192 ~1998!.
10. R. E. Hopkins, “Mirror and prism systems,” in Applied Opticsand Optical Engineering, R. Kingslake, ed. ~Academic, SanDiego, Calif., 1965!, Vol 3, Chap. 7.
11. R. E. Hopkins, “Mirror and prism systems,” in Military Stan-dardization Handbook: Optical Design, MIL-HDBK 141~U.S. Defense Supply Agency, Washington, D.C., 1962!.
12. E. A. Skorikov, “Conditions required for the stabilization of thedirection of radiation of periscopic antennas,” Radiotekhnika30, 9–14 ~1974!.















![L 33 Light and Optics [3] images formed by mirrors –plane mirrors –curved mirrors concave convex Images formed by lenses the human eye –correcting vision](https://img.pdfslide.net/doc/110x75/56649d0e5503460f949e3e58/l-33-light-and-optics-3-images-formed-by-mirrors-plane-mirrors-curved.jpg)











