-
8/6/2019 Com Bi National &Sequential Circuits
1/10
2. Combinational and Sequential circuits
2.1 Introduction
The logic circuits are basically two types. One is Combinational
and the other is Sequential. A
Combinational circuit consists of logic gates whose outputs at
any time depends only on present inputs without
regard to previous inputs. A Combinational circuit is specified
logically by a set of Boolean functions.
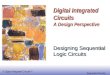
A block diagram of a Combinational circuit is shown in fig 2.1.
It has n inputs and m outputs for n
input variables. There are 2npossible combinations of binary
input values. For each possible input combination
there are one and only one possible output combination.
Fig. 2.1 Block diagram of a Combinational circuit
The examples for Combinational circuits are Muliplexers,
Demultiplexers, Decoders, Encoders and Adders
etc
A Sequential logic circuit is one whose output at any time
depends not only on present inputs, but also
on past inputs and the circuit behaviour must be specified by a
time sequence of inputs and internal states. So, a
Sequential circuit should have memory element also to remember
previous inputs.
A block diagram of a Sequential circuit is shown in fig 2.1(b).
It consists of combinational circuit to
which memory element are connected to form a feedback path. The
memory element stores the binary
information. The binary information is stored in the memory
elements at any given time defines the state of
Sequential circuit. The block diagram explains that the output
of a Sequential circuit is a function of not only
present external inputs. But also of the present state of memory
elements.
There are two types of Sequential circuits. They are (a)
Synchronous Sequential circuit and (b)
Asynchronous Sequential circuit
Fig. 2.1(b) Block diagram of a Sequential circuit
A Synchronous Sequential circuit is a system whose behaviour can
be defined from the knowledge of
its signals at discreet instants of time. An Asynchronous
Sequential circuit is one whose behaviour depends on
the order in which its input signals change and can be affected
at any instant of time. The memory elements
commonly used in Asynchronous Sequential circuits are time delay
devices.
The examples for Sequential circuits are Flip Flops, Counters
and Registers etc
-
8/6/2019 Com Bi National &Sequential Circuits
2/10
The differences between Combinational and Sequential circuits is
given in table 2.1
Combinational circuit Sequential circuit
1. It is a logic circuit.
Whose output at any time depends on input
applied at that instant only.
2. It has no memory element.
3. It can be totally described by the set of
output values only.
4. As there is no memory element, Its design
is simple.
5. It is a faster device.
6. Needs more hardware for realisation.
7. It is expensive in cost.
1. It is a logic circuit.
Whose output at any time depends on both
present and as well as previous inputs.
2. It should have at least one memory element
3. It can be described totally by the set of
sequent state values as well as set of output
values.
4. Its design is complex.
5. Slow in speed.
6. Needs less hardware for its realisation.
7. Not expensive.
-
8/6/2019 Com Bi National &Sequential Circuits
3/10
2.9 Semi-conductor Memories:
Memory is a very important part of any digital system. A memory
is a storing device which stores the data
and some data can be retrieved at any instant of time.
The Semi-conductor memories are broadly classified into two
types.
(a) Random Access Memory (RAM).
(b) Read Only Memory (ROM).
(a) RAM: Random Access Memory is also known as Read/Write (R/W).
In a Random Access Memory the
access time is independent of address location of data i.e., any
memory address location can be easilyaccessed. Generally, A RAM
contains binary memory cells arranged as matrix (M x N) with an
address
scheme for accessing the memory cells.
Since a RAM is made up of flip-flops it cannot store the data
permanently i.e.,a RAM is a volatile. So the
information stored in it will exist as long as the power is ON.
As soon as the power goes OFF the stored
information is lost. Hence we always refresh the RAM.
There are two types of RAM s. They are:
(i). Static RAM (SRAM).
(ii). Dynamic RAM (DRAM).
The Static RAM do not store the information permanently because
it is volatile. Whereas in a Dynamic RAM
there will be a refreshing circuit which avoids the loss of
data. So by refreshing the DRAM in regularintervals we can avoid
the loss of data, In a Dynamic RAM the data bit is stored on the
gate to source
capacitor of a MOS transistor memory circuit. Normally the
Dynamic RAM s are refreshed of every two
milli seconds.
The Dynamic RAM s are cheap when compared to Static RAM s and
also they have very high package
density. Their speed is also moderately high. Whereas the Static
RAM s are costlier and consume more power.
They have higher speed than Dynamic RAM s.
There is also another type of RAM called SDRAM (synchronous
DRAM) . The SDRAM s are fast and
they have both the advantages of SRAM and DRAM.
Differences between static and dynamic RAMs:
S.No Static RAM Dynamic RAM
1
2
3
4
5
This is constructed using bipolar
transistors
.Information is stored in the form of
voltage levels in flip-flops.These
voltage levels do not get drifted
away
No refresh logic is needed
Power is required even when the chip is
in standby mode
Four time larger in size compared to an
equivalent dynamic cell
This is constructed using MOS transistors
Information is stored in the form of
electrical charges in capacitors.So,has
tendency of leakage.
Refresh logic is necessary .
Refresh logic is inbuilt, so draws less
power comparatively.
Four times as many bits as a static RAM
chip.
-
8/6/2019 Com Bi National &Sequential Circuits
4/10
(b) ROM: ROM stands for Read Only Memory. It is a non-volatile
memory. i.e., it stores thr information even
if the power supply goes off.(or fails). They are usually
designed in such a way as to store the data permanently
in the binary form. The information once written or stored in a
rom cannot be normally changed.
ROM s are classified into three types. They are:
(i). PROM.
(ii).EPROM.
(iii). EEPROM.
(i)PROM: PROM Stands for Programmable Read Only Memory. The
contents of the PROM are decided by theUser for programming a PROM
there are certain special devices called PROM or EPROM programmers.
Using
These programmers we can store any required information in ROM.
The PROM s are more cost effective to
store certain fixed programs. For example, In a computer the
BIOS information are in a PROM. Example for a
PROM is 71LS287 (IC).
(ii).EPROM (Erasable PROM): These types of memories can be
programmed and erased any number of times.
Hence they are called as Erasable PROM s. These EPROM s are
based on MOS Technology. Data is stored by
a applying a high voltage pulse to the insulated gate of MOSFET.
Normally, ultra violet light is used to
erase
the contents of EPROM. On the EPROM IC a small window is
provided which protects the memory from
external UV light. Most of EPROM s operate at 5V. The only
disadvantage of the EPROM s is it takes moretime for the erase of
data. For 64 KB EPROM the total programming time will be around 5
to 6 minutes. The
Well known EPROM IC is 27512 (64 KB, Hitachi make).
(iii). EEPROM (Electrically EPROM): It is Electrically Erasable
Programmable Read Only Memory. This
avoids the problems of erasing the data with UV radiation. Here
the data is erased by applying an electric field.
Normally, the EEPROM s takes very less time for both programming
and erasing. Hence most of the designers
Prefer EEPROM s to EPROM s for any computer system. The
popularly known EEPROM is 58064 (8KB
Hitachi makes).
CAMS (Content Access Memory (or) Content Addressable Memory):
This CAM is a random Accessmemory device that can be accessed by
searching data content. For this purpose it is addressed by
associating
the input data to a key, simultaneously with all the stored
words. The output signals indicate the match
Conditions between the key and the stored words. This operation
is referred to as association and this type of
Memory is also known as Association memory
A CAM differs from the conventional memory organization in a way
that the addressing of the location
Depends on the memory content whereas it is not the case with
conventional memory
As the CAM has the ability to search the stored data based on
its contents it is therefore a powerful tool
in many applications. CAM s is manufactured using MOS, CMOS or
Bi-polar technologies. Most of the
CAM s use ECH (Emitter Coupled Logic) circuitry because of its
high speed operation.
Advantages of Semi-conductor Memories:
When the performance of memory devices are compared, the
semi-conductor memories are fast and more
Efficient , when compared to magnetic and optical memories. The
magnetic and optical devices can
store bulk data but they are very slow in speed. The read/write
timings of semiconductor devices is high. But
these devices are cost effective. i.e. ,the cost of the semi
conductor memories are relatively more than that
of the magnetic and optical devices.
Memory Organization:
The basic element of a semiconductor memory is a FLIP-FLOP. The
information is stored in binary form.
There are a number of locations in a memory chip, each location
being meant for one word of digital
information. The number of locations and the number of bits
comprising the word vary from memory to
-
8/6/2019 Com Bi National &Sequential Circuits
5/10
memory. The size of a memory chip is specified by two numbers M
and N as M x N bits. The number M
specifies the number of locations available in the memory and N
is the number of bits at each location. In other
words, this means that M words of N bits each can be stored in
the memory. The commonly used values of the
number of words per chip are 64, 256, 512, 1024, 2048, 4096 etc.
Whereas the common values for the word
size are 1, 4, and 8, etc.
The block diagram of a memory device is shown in fig. 2. . Each
of the M locations of the memory is
defined by a unique address and, therefore, for accessing any
one of the M locations, P inputs are required,
where 2p=M. This set of lines is referred to as address inputs
or address bus. The address is specified in thebinary form. For
convenience, Octal and Hexadecimal representations are commonly
employed.
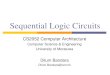
In fact, the address input is applied to a P to M decoder
circuit, which activates one of its M outputsdepending on the
address and, thus, the desired memory location is selected.
For example let us consider the internal organization of 16 4
memory chip shown in fig.
Fig 2. Internal organization of a 16 4 memory chip
-
8/6/2019 Com Bi National &Sequential Circuits
6/10
The number of inputs required to store the data into or read the
data from each locations is N. One set of N lines
is required for storing the data into the memory, referred to as
data inputs and another set of N lines is
required for reading the data already stored in the memory,
which is referred to as data outputs. In somememory chips, the same
set of lines is used for data input as well as data output and is
referred to as data
bus.
A Number of control inputs are required to give command to the
device to perform the desired operation.
For example , a command signal is required to tell the memory
whether a write or a read operation is
desired. Other command inputs include chip enable (CE), chip
select (CS), etc.
Since M=16, 2P
=M gives P=4. The address of each location is is given in table
2. .
Working: To understand the working of semiconductor memories let
us consider the write and readoperation.
Write operation: To write a word in the selected memory location
requires logic 1 voltage to be applied to CS
and write inputs. This combination enables the input buffers so
that the 4-bit word applied to the data inputs
will be loaded into the selected location. The condition WR=1
also disables (tristate) the output buffers, so that
the data outputs are in their high-impedance state.
For writing a word into a particular memory location, following
sequence of operations is to be performed.
1. The chip select signal is applied to the CS terminal.
2. The word to be stored is applied to the data - input
terminals.
3. The address of the desired memory locations applied to the
address - input terminals.
4. A write command signal is applied to the write - control
input terminal.
In response to the above operations, the addressed memory
location is cleared of any word that might have
been stored in it, and the information presented at the data
input terminal replaces it.
Figure 2. Illustrates the various waveforms during the write
operation. The important timing
characteristics of the write cycle are
Write cycle time (tWC): This is the minimum amount of time for
which the valid address must be present forwriting a word in the
memory. In other words, it is the minimum time required between
successive write
operations.
Word
Number
Binary Address
A3 A2 A1 A0
0
1
2
3
4
56
7
8
9
10
11
12
13
14
15
0
0
0
0
0
00
0
1
1
1
1
1
1
1
1
0
0
0
0
1
11
1
0
0
0
0
1
1
1
1
0
0
1
1
0
01
1
0
0
1
1
0
0
1
1
0
1
0
1
0
10
1
0
1
0
1
0
1
0
1
-
8/6/2019 Com Bi National &Sequential Circuits
7/10
Write pulse time (tW): This is the minimum length of the write
pulse.
Write release time (tWR): This is the minimum amount of time for
which the address must be valid after the
write pulse ends.
Data set up time (tDW):This is the minimum amount of time for
which the data must be validbefore the write
pulse ends.
Data hold time (t DH): This is the minimum amount of time for
which the data must be valid after the write pulse
ends.
Read operation: In order to read the contents of a selected
memory, the read and the chip select (CS) inputs
must be at the logical 1 level. This enables the output buffers
so that the contents of the selected location will
appear at the data outputs. The condition RD=1 also tristates
the input buffers so that the data inputs do not
affect the memory during a read operation.
To read (or retrieve) a data word, Known to be stored at a
particular address, the following sequence of
operations is required to be performed.
1. The chip select signal is applied to the CS terminal.
2. The address of the desired memory locations applied to the
address - input terminals.
3. A read command signal is applied to the read - control input
terminal.
In response to the above operations, the data word is stored at
the addressed location appeares on the
data output terminals.
Figure 2. Illustrates the various waveforms during the read
operation. The important timing characteristics of
the read cycle are:
Read cycle time (tRC): This is the minimum amount of time for
which the valid address must be present forreading word from the
memory. In other words, it is the minimum time required between
successive read
operations.
Access time (tA): This is the maximum time from the start of the
valid address of the read cycle to the time when
the valid data is available at the data outputs. The access time
is at most equal to the read - cycle time, i.e. tA
tRC. In other words, the data outputs might be ready before the
memory is actually ready for the next read
operation.
Read to output valid time (tRD): This is the maximum time delay
between the beginning of the read pulse and
the availability of valid data at the data outputs.
Read to output active time (tRDX): This is the minimum time
delay between the beginning of the read pulse and
the output buffers coming to active state (from the
high-impedance state).
Chip-select to output valid time (tCO): This is the maximum time
delay between the beginning of the Chip-select
pulse and the availability of valid data at the data outputs
Chip-select to output active time (tCX): This is the minimum
time delay between the beginning of the chip-select
pulse and the output buffers coming to active state.
Output tristate from read (tOTD): This is the maximum time delay
between the end of the read pulse and the
output buffers going to high impedance stste.
Data hold time (tOHA): This is the minimum time for which the
valid data is available at the data outputs after
the address ends.
Figure 2. Illustrates the various waveforms during the read
operation. The important timing characteristics
of the read cycle are
2.12 UP-DOWN Counters:
-
8/6/2019 Com Bi National &Sequential Circuits
8/10
Generally, an up counter will count from minimum value to
maximum value and the down counter will
count from maximum value to minimum value. To get a counter to
count up or down certain modifications
must be done. We know that, In an up-counter the normal output
of a flip-flop is connected to the clock input of
the following flip-flop and in a down-counter it is the
complement output which is connected to the clock input
of the following flip-flop. The modified circuit for up-down
counter is shown in fig 2.
The normal and complement outputs of flip-flops are connected to
AND gates D and E and the output of the
AND gates goes to the clock input of the next flip-flop via OR
gate F. When the up-down control is logic 1,
gate D and F are enabled and the normal output of each flip-flop
is coupled via OR gates (F) to the clock input
of the next flip-flop. Gates E are inhibited, as one input of
all these gates goes low because of the inverter. So,
The counter counts up.
When the up-down control is at logic 0,gates D are inhibited and
gates E are enabled. As a consequence
the complement output of each flip-flop is coupled via OR gates
(F) to the clock input of the next flip-flop. So,
the counter counts down.
This is the working of an up-down counter. The 74LS190 and
74HC190 are two several synchronous
up/down counter IC s.
2.13 Decade counter (7490):
7490 is a 4 bit ripple type decade counter. It is a 14 pin
monolithic plastic dual in line package (PDIP)Chip with power
dissipation of 145mW and count frequency of 42 MHZ. The device
consists of master slave
flip-flops internally connected to provide a divide by two
section and a divide by 5 section. Each section
has a separate clock input to initiate state changes of the
counter on the high to low clock transition. State
changes of the Q-Outputs do not occur simultaneously because of
internal ripple delays.
A gated AND asynchronous Master reset (MR1-MR2) is provided
which overrides both clocks and
clears all the flip-flops. Also a gated AND asynchronous Master
set (MS1-MS2) is provided which overrides
the clocks and the MR inputs, setting the outputs to none
(1001). Since the output from the divide by two
section is not internally connected to the succeeding stages,
the device may be operated in the various counting
modes. In a BCD counter (8421) the 1 input must be externally
connected to the Q0 output. The 0 input
receives the incoming count producing a BCD count sequence. Mode
selection function table is shown in table2.
To operate as a divide by two and divide by five counters no
external inter connections are required. The
first flip-flop is used as a binary element for the divide by
two functions. The CP1 input is used to obtain a
divide by five operations at the Q3output.
-
8/6/2019 Com Bi National &Sequential Circuits
9/10
Table1. Mode selection function table
Reset /set inputs Outputs
MR1 MR2 MS1 MS2 Q0 Q1 Q2 Q3
1
1
X
0
X
0
1
1
1
X
X
0
X
0
0
X
1
0
X
X
0
X
1
1
X
0
0
X
0 0 0 0
0 0 0 0
1 0 0 1
Count
Count
Count
Count
Here X is the dont care condition
Table2. BCD count sequence function table
Count Outputs
Q0 Q1 Q2 Q3
0
1
2
3
4
5
6
7
8
9
0
1
0
1
0
1
0
1
0
1
0
0
1
1
0
0
1
1
0
0
0
0
0
0
1
1
1
1
0
0
0
0
0
0
0
0
0
0
1
1
-
8/6/2019 Com Bi National &Sequential Circuits
10/10
Differences between the Synchronous and Asynchronous
counters:
Asynchronous counters Synchronous counters
1. Flip-flops are connected such that the
output of the first flip-flop will
become the clock pulse for the second
flip-flop and so on.
2. It is also called a serial counter or
Ripple counter.3. Speed is low and propagation delay is
high.
4. There is a limitation for high
frequency due to propagation delay.
5. Logic circuit is simple even for more
number of states
1. Here flip-flops are connected such
that each flip-flop is triggered by
a clock pulse at the same time.
2. It is called a parallel counter.
3. Speed is high and there is no
propagation delay.
4. No limitation on high frequencies.
5. As number of states increases
design becomes complex.